ГОСТ Р ИСО 14839-1-2011
Группа Т34
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ВИБРАЦИЯ МАШИН ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ С АКТИВНЫМИ МАГНИТНЫМИ ПОДШИПНИКАМИ
Часть 1
Термины и определения
Vibration. Vibration of rotating machinery equipped with active magnetic bearings. Part 1. Terms and definitions
ОКС 01.040.17
17.160
Дата введения 2012-09-01
Предисловие
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией "Научно-исследовательский центр контроля и диагностики технических систем" (АНО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2011 г. N 527-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 14839-1:2002* "Вибрация. Вибрация машин вращательного действия с активными магнитными подшипниками. Часть 1. Словарь" (ISO 14839-1:2002 "Mechanical vibration - Vibration of rotating machinery equipped with active magnetic bearings - Part 1: Vocabulary", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5)
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Январь 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Область применения
Настоящий стандарт устанавливает термины и определения, относящиеся к машинам вращательного действия с активными магнитными подшипниками.
Примечание - Общие термины и определения в области вибрации установлены ИСО 2041, термины и определения в области балансировки вращающихся тел - ИСО 1925.
Термины и определения
1 Общие термины
На рисунке 1 показаны условные изображения подшипников, используемых в машинах вращательного действия с активными магнитными подшипниками.
|

1 - радиально-упорный шариковый подшипник; 2 - шариковый подшипник с глубоким желобом; 3 - упорный шариковый подшипник; 4 - радиальный активный магнитный подшипник; 5 - осевой активный магнитный подшипник; a - с датчиком перемещения
Рисунок 1 - Условные изображения подшипников
1.1 магнитный подшипник: Подшипник, в котором для создания левитации и динамической стабилизации ротора использованы силы притяжения или отталкивания со стороны магнитного поля | en | magnetic bearing |
fr | palier | |
1.2 левитация: Подъем ротора без механического воздействия (контакта) только силами притяжения или отталкивания со стороны магнитного поля | en | levitation |
fr |
| |
1.3 активный магнитный подшипник (АМП): Устройство поддержания ротора без механического контакта за счет сил магнитного притяжения и использования следящей обратной связи, цепь которой, как правило, содержит датчики, электромагниты, усилители мощности, источники питания и контроллеры (см. рисунок 2) | en | active magnetic bearing; AMB |
fr | palier |
|
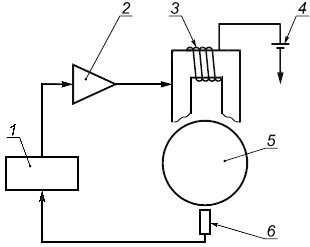
1 - контроллер; 2 - усилитель мощности; 3 - электромагнит; 4 - источник питания; 5 - ротор; 6 - датчик перемещения
Рисунок 2 - Принципиальная схема активного магнитного подшипника
1.4 пассивный магнитный подшипник: Устройство поддержания ротора без механического контакта за счет сил магнитного поля без использования управления с обратной связью. | en | passive magnetic bearing |
fr | palier | |
Примеры - Подшипник с постоянными магнитами (ППМ), сверхпроводниковый магнитный подшипник (СМП) | ||
1.5 подшипник с постоянными магнитами (ППМ): Пассивный магнитный подшипник, в котором использованы одна или несколько пар постоянных магнитов | en | permanent magnetic bearing; PMB |
fr | palier | |
1.6 сверхпроводниковый магнитный подшипник (СМП): Пассивный магнитный подшипник, использующий в своей конструкции пару сверхпроводников (высокотемпературных) и постоянные магниты, в котором стабильность положения ротора обеспечивается силами пиннинга (силами притяжения и отталкивания) | en | super-conducting magnetic bearing; SMB |
fr | palier | |
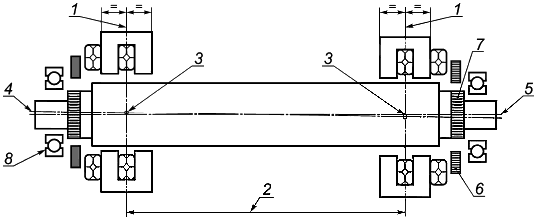
1.7 гибридный магнитный подшипник (ГМП): Подшипник, сочетающий в себе конструкции активного и пассивного магнитных подшипников (см. рисунок 3) | en | hybrid magnetic bearing; HMB |
fr | palier | |
1.8 АМП на основе постоянных магнитов: Активный магнитный подшипник, в котором номинальный (ненулевой) магнитный поток в зазоре АМП (магнитное смещение) обеспечивается с помощью одного или нескольких постоянных магнитов | en | permanent-magnet-based AMB |
fr | PMA | |
1.9 радиальный магнитный подшипник: Магнитный подшипник, в котором левитация ротора обеспечивается за счет противодействия магнитной силы силе тяжести и/или возмущающим силам (например, гидравлической или обусловленной дисбалансом ротора) в радиальном направлении (см. рисунок 4) | en | radial magnetic bearing |
fr | palier | |
1.10 осевой АМП: Активный магнитный подшипник, компенсирующий действие возмущающих сил (например, гидравлической или силы тяжести в случае вертикального ротора) в осевом направлении (см. рисунок 5) | en | axial AMB; thrust AMВ |
fr | PMA axial; PMA de |
|
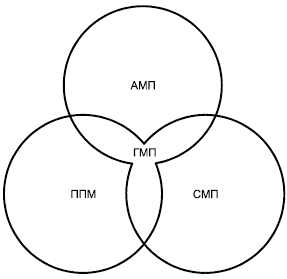
Рисунок 3 - Категории гибридных магнитных подшипников
1.11 зазор АМП: Зазор между сердечником ротора и сердечником статора в активном магнитном подшипнике, когда положение центра цапфы ротора совпадает с положением центра статора (см. | en | AMB clearance |
fr | entrefer de PMA | |
1.12 центр радиального АМП: Геометрический центр статора радиального подшипника (см. рисунок 6) | en | clearance centre of a radial AMB |
fr | centre du jeu d'un PMA radial |
|
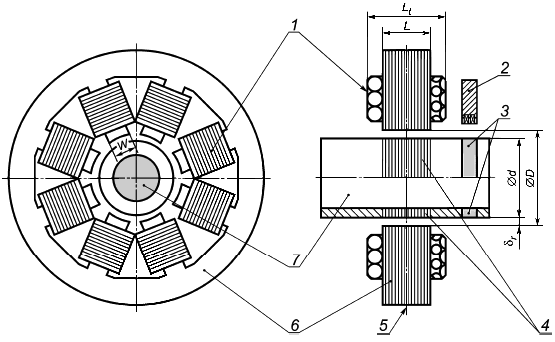
1 - катушка управления; 2 - датчик перемещения в радиальном направлении; 3 - измерительная поверхность для датчика; 4 - сердечник ротора; 5 - ось полюса статора; 6 - сердечник статора; 7 - вал; - внутренний диаметр сердечника статора;
- внешний диаметр сердечника ротора;
- номинальный воздушный зазор,
![]() ;
; - общая длина подшипника (включая обмотку электромагнита);
- эффективная длина подшипника;
- ширина полюса;
- площадь полюса,
![]()
Рисунок 4 - Радиальный АМП в сборе
1.13 магнитный центр радиального АМП: Центр поперечного сечения цапфы ротора при таком его положении, когда результирующая сила притяжения, действующая на ротор в радиальном направлении при номинальных токах в катушках статора (номинальных магнитных потоках в подшипнике) и при отсутствии компенсирующих сил (компенсирующего магнитного поля), пренебрежимо мала | en | magnetic centre of a radial AMB |
fr | centre |
|

1 - ротор; 2 - измерительная поверхность для датчика; 3 - датчик перемещения в осевом направлении; 4 - сердечник статора; 5 - катушка статора; 6 - центральная ось осевого АМП; 7 - упорный диск ротора; - внешний диаметр диска ротора;
- внешний диаметр внешнего полюса статора;
- внутренний диаметр внешнего полюса статора;
- внешний диаметр внутреннего полюса статора;
- внутренний диаметр внутреннего полюса статора;
- номинальный воздушный зазор;
- площадь пары полюсов,
![]()
Рисунок 5 - Осевой АМП в сборе
1.14 ось полюса статора радиального АМП: Ось симметрии полюса статора радиального АМП (см. рисунок 6) | en | axial centre of a radial AMB |
fr | centre axial d'un PMA radial |
|
а) Гетерополярный тип
|
b) Гомополярный тип
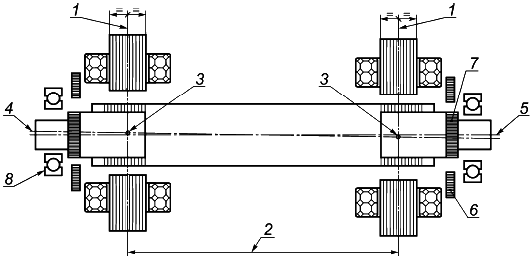
1 - ось полюса статора; 2 - пролет между радиальными АМП; 3 - центр радиального АМП; 4 - центральная ось радиального АМП; 5 - ось цапфы; 6 - датчик перемещений в радиальном направлении; 7 - измерительная поверхность для датчика; 8 - страховочный подшипник
Рисунок 6 - Центры и центральные оси радиального подшипника
1.15 центральная ось осевого АМП: Ось симметрии статора осевого подшипника (см. рисунок 5) | en | (clearance) centre of an axial AMB |
fr | centre (jeu) d'un PMA axial | |
1.16 магнитная центральная ось осевого АМП: Ось диска ротора при таком его положении в осевом АМП, когда результирующая сила притяжения, действующая на диск в осевом направлении, пренебрежимо мала | en | axial magnetic centre of an axial AMB |
fr | centre | |
1.17 центральная ось радиального АМП: Линия, соединяющая центры двух радиальных АМП и определяемая конструкцией статора подшипника (см. рисунок 6) | en | clearance centreline of radial AMB |
fr | axe du jeu de PMA radial | |
1.18 ось цапфы в радиальном АМП: Ось симметрии цапфы ротора в радиальном АМП, совпадающая с осью вала, если принять ротор абсолютно жестким телом (см. рисунок 6) | en | journal centreline of radial AMB |
fr | axe du tourillon de PMA radial | |
1.19 пролет между радиальными АМП: Расстояние между осями полюсов статоров двух радиальных АМП (см. рисунок 6) | en | bearing span between radial AMBs |
fr |
| |
1.20 число полюсов: Сумма южных (S) и северных (N) полюсов электромагнитов радиального АМП (см. рисунок 7) | en | number of poles |
fr | nombre de |
|
|
а) Гетерополярный тип (8 полюсов) | b) Гомополярный тип (8 полюсов) |
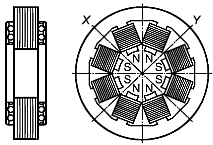
,
- оси управления
Рисунок 7 - Число полюсов радиального АМП
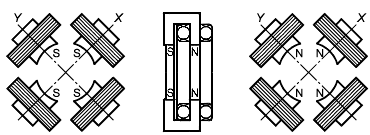
1.21 радиальный АМП гетерополярного типа: Радиальный АМП, поперечное сечение которого проходит через полюса электромагнитов разной полярности (см. рисунок 8). | en | heteropolar-type radial AMB |
Примечание - Порядок следования полюсов может быть разным, например, (N, S, N, S, ...) или (N, S, S, N, ...). | fr | PMA radial |
|
,
- оси управления
Рисунок 8 - Радиальный АМП гетерополярного типа
1.22 радиальный АМП гомополярного типа: Радиальный АМП, поперечные сечения которого проходят через полюса электромагнитов одной полярности (либо S, либо N) (см. рисунок 9). | en | homopolar-type radial AMB |
Примечание - Порядок следования полюсов в сечении будет (N, N, N, N, …) либо (S, S, S, S, …). | fr | PMA radial homopolaire |
|

,
- оси управления
Рисунок 9 - Радиальный АМП гомополярного типа
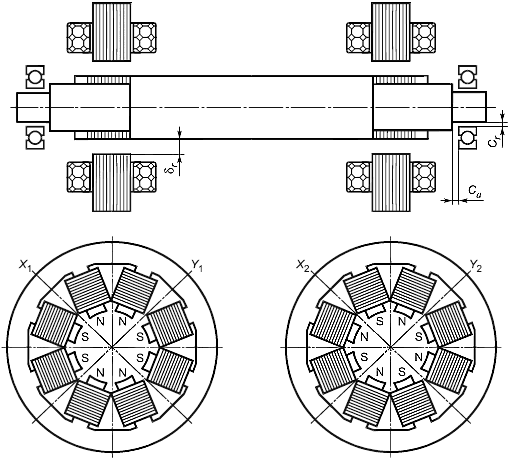
1.23 эффективная длина радиального магнитного подшипника | en | effective length of radial magnetic bearing |
fr | longueur effective de palier |
|
|
а) Гетерополярный тип | b) Гомополярный тип ( |
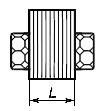
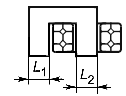
Рисунок 10 - Эффективная длина радиального магнитного подшипника
1.24 площадь проекции радиального АМП: Произведение диаметра цапфы ротора | en | projection area of a radial AMB |
fr | surface de projection d'un PMA radial | |
1.25 площадь полюса электромагнита: Площадь | en | area of one magnetic pole |
Примечание - Данная величина отличается от площади проекции радиального АМП, определенной в 1.24. | fr | surface d'un |
1.26 несущая способность АМП: Максимальная сила, действующая со стороны АМП на ротор, зафиксированный в его среднем положении (см. рисунок 11). | en | load capacity of an AMВ |
Примечание - Эта величина обычно ограничена магнитным насыщением ферромагнитного материала, из которого изготовлены сердечники ротора и статора, максимальным током и максимальным напряжением на выходе усилителя мощности. | fr |
|
|
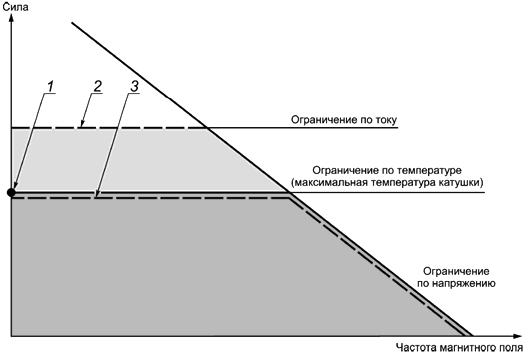
1 - несущая способность в статическом режиме; 2 - пиковая несущая способность; 3 - несущая способность в динамическом режиме
Рисунок 11 - Несущая способность АМП
1.26.1 несущая способность АМП в статическом режиме | en | static load capacity of an AMB |
fr |
| |
1.26.2 пиковая несущая способность АМП: Максимальная несущая способность АМП при статической нагрузке в ограниченный период времени | en | peak transient load capacity of an AMB |
fr |
| |
1.26.3 несущая способность АМП в динамическом режиме: Максимальная амплитуда периодической силы, создаваемой АМП, в зависимости от частоты | en | dynamic load capacity of an AMB |
fr |
| |
1.27 удельная несущая способность радиального АМП | en | load pressure of a (radial) AMB |
Примечание - См. 1.24 и 1.26.1. | fr | pression de charge d'un PMA (radial) |
1.28 число осей управления АМП: Число степеней свободы движения ротора, управляемого АМП. | en | number of control axes of an AMB |
Примеры: | fr | nombre d'axes de commande d'un PMA |
1.29 общие потери АМП: Сумма потерь в магнитной системе АМП вследствие эффектов вихревых токов и гистерезиса в роторе и статоре, нагревания в обмотке электромагнитов, воздушного сопротивления вращению ротора, а также потерь в элементах электрической цепи (кабеле, шкафе автоматического управления) | en | total AMB loss |
fr |
| |
1.30 АМП с автоматическим определением положения: АМП, имеющий функцию определения положения ротора без использования датчиков перемещения | en | self-sensing AMB |
fr | PMA | |
1.31 время установления: Время, необходимое для достижения пиковой несущей способности АМП | en | rise time |
fr | temps de | |
1.32 время пребывания: Время, в течение которого возможно поддержание пиковой несущей способности АМП | en | dwell time |
fr | temps de passage (de maintien) |
2 Термины, относящиеся к ротору
2.1 сердечник ротора: Часть ротора из ферромагнитного материала, на который воздействуют магнитные силы в радиальном направлении | en | radial rotor core; radial rotor journal |
fr | noyau de rotor radial; tourillon de rotor radial | |
2.2 упорный диск ротора (для осевого АМП): Часть ротора из ферромагнитного материала, на который воздействуют магнитные силы в осевом направлении | en | axial bearing disc; axial disc; axial rotor disc; thrust bearing disc; thrust disc; thrust rotor disc |
fr | disque de palier axial; disque axial; disque rotor axial; disque de palier de | |
2.3 диаметр цапфы: Диаметр части ротора, находящейся в радиальном магнитном подшипнике (см. | en | journal diameter |
fr |
| |
2.4 механические биения: Составляющая измеренного смещения вращающегося вала, обусловленная его некруглостью и несоосностью | en | geometrical runout; mechanical runout |
fr |
| |
2.5 электрические биения: Составляющая измеренного смещения вращающегося вала, обусловленная магнитной неоднородностью измерительной поверхности для датчика | en | electrical runout; sensor runout |
fr |
| |
2.6 DN-показатель: Произведение диаметра | en | DN value |
Примечание - Диаметр a) внешний диаметр ротора радиального АМП, если статор находится снаружи ротора (см. b) внутренний диаметр ротора радиального АМП, если статор находится внутри ротора; c) внешний диаметр ротора осевого АМП (см. | fr | valeur DN |
3 Термины, относящиеся к статору
3.1 сердечник статора: Части стационарных элементов АМП, изготовленные из ферромагнитного или другого материала, обладающего магнитной проницаемостью | en | stator core |
fr | noyau de stator | |
3.2 сердечник статора радиального подшипника: Стационарная часть радиального магнитного подшипника, на которую навиты катушки управления | en | radial stator core |
fr | noyau de stator radial | |
3.3 сердечник статора осевого подшипника: Стационарная часть осевого магнитного подшипника, на которую навиты катушки управления | en | axial stator core; thrust stator core |
fr | noyau de stator axial; noyau de stator de | |
3.4 катушка управления: Катушка, используемая для создания магнитного потока в материале сердечника | en | magnetizing coil |
fr | bobine de | |
3.5 катушка радиального подшипника: Катушка управления, навитая вокруг сердечника статора радиального подшипника, или полюс электромагнита | en | radial coil |
fr | bobine radiale | |
3.6 катушка осевого подшипника: Катушка управления осевого АМП | en | axial coil; thrust coil |
fr | bobine axiale; | |
3.7 допустимая рабочая температура: Температура окружающей среды, при которой возможна работа АМП в нормальном установленном режиме | en | allowed operating temperature |
fr |
|
4 Термины, относящиеся к датчику перемещения
4.1 радиальное перемещение вала: Перемещение оси ротора в радиальном направлении относительно его среднего положения, определяющее изменение положения ротора во времени (см. рисунок 12) | en | radial shaft displacement |
fr |
| |
4.2 датчик перемещения: Датчик, позволяющий измерять перемещения вала без механического контакта с ним (см. рисунки 4 и 5). | en | displacement sensor; position sensor |
Примеры - Вихретоковый датчик, индуктивный датчик, емкостной датчик, оптический датчик, датчик Холла. | fr | capteur de |
4.3 датчик радиального перемещения: Датчик, позволяющий измерять перемещения вала в радиальном направлении (см. рисунок 6) | en | radial displacement sensor; radial position sensor |
fr | capteur de | |
4.4 датчик осевого перемещения: Датчик, позволяющий измерять перемещения вала в осевом направлении (см. рисунок 5) | en | axial displacement |
fr | capteur de |
|
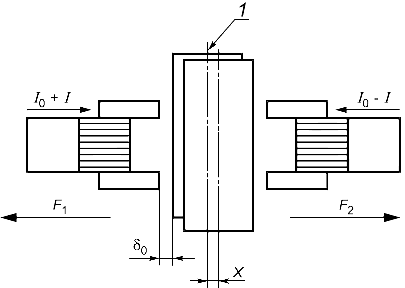
1 - номинальное положение вала
Примечание - Связь между силами притяжения, токами электромагнита и перемещением вала описывается формулами:
 ;
;
![]() ;
;  ,
,
где - токовая жесткость электромагнита;
- отрицательная позиционная жесткость;
,
- силы притяжения в электромагните;
- результирующая магнитная сила;
- коэффициент пропорциональности;
- ток смещения;
- номинальный радиальный зазор;
- радиальное перемещение вала;
- управляющий ток.
Рисунок 12 - Связь между силами притяжения, токами и перемещением вала (см. примечание к рисунку)
4.5 измерительная поверхность (для датчика): Область поверхности вала, по которой датчик отслеживает его перемещение (см. рисунки 4 и 5) | en | sensor target |
fr | piste du capteur | |
4.6 измерительная поверхность для датчика радиального перемещения: Область поверхности вала, по которой датчик радиального перемещения отслеживает перемещение вала в радиальном направлении (см. рисунок 4) | en | radial (sensor) target |
fr | piste du capteur radial | |
4.7 измерительная поверхность для датчика осевого перемещения: Область поверхности вала, по которой датчик осевого перемещения отслеживает перемещение вала в осевом направлении (см. рисунок 5) | en | axial (sensor) target |
fr | piste du capteur axial |
5 Термины, относящиеся к динамике вала, управлению его движением и электронным средствам управления
5.1 система активного магнитного подвеса: Система, в состав которой входят ротор, датчики перемещения или другие средства определения положения ротора, контроллер(ы), усилители мощности и электромагниты для создания левитации и поддержания ротора за счет сил магнитного притяжения (см. рисунки 2 и 13) | en | AMB system |
fr |
| |
5.2 контроллер: Устройство для обработки сигнала датчика и передачи его на усилитель мощности для корректировки сил магнитного притяжения и управления эффектом левитации | en | AMB controller |
Примечание - Данное устройство может быть реализовано в аналоговом (аналоговый контроллер) или цифровом (цифровой контроллер) виде. | fr |
|
5.3 усилитель мощности: Устройство, обеспечивающее подачу тока в катушку управления для создания необходимой управляющей магнитной силы. | en | power amplifier |
Примеры - линейный усилитель мощности; аналоговый усилитель; усилитель с широтно-импульсной модуляцией; коммутирующий усилитель. | fr | amplificateur de puissance |
|
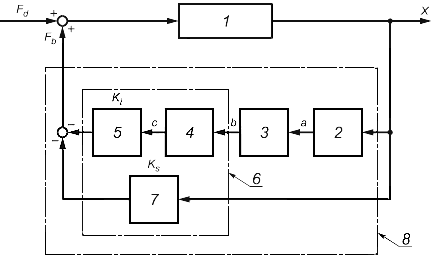
1 - ротор; 2 - датчик перемещения; 3 - контроллер АМП; 4 - усилитель мощности; 5 - электромагнит; 6 - исполнительный блок; 7 - отрицательная позиционная жесткость; 8 - АМП
а) Система без опорного сигнала
|
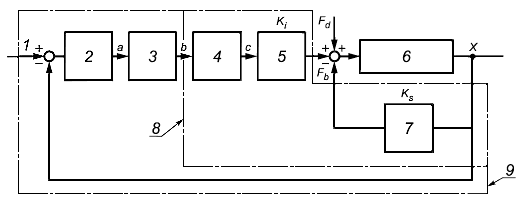
1 - опорный сигнал; 2 - датчик перемещения; 3 - контроллер АМП; 4 - усилитель мощности; 5 - электромагнит; 6 - ротор; 7 - отрицательная позиционная жесткость; 8 - исполнительный блок; 9 - АМП
b) Система с опорным сигналом
a - сигнал датчика; b - сигнал управления; c - управляющий ток; - сила в АМП;
- возмущающая сила;
- перемещение;
- токовая жесткость электромагнита;
- отрицательная позиционная жесткость
Рисунок 13 - Блок-схема системы активного магнитного подвеса
5.4 управление по току: Способ управления АМП с использованием усилителей мощности с входом по напряжению и выходом по току | en | (AMB) current control |
fr | commande de courant (PMA) | |
5.5 управление по напряжению: Способ управления АМП с использованием усилителей мощности с входом и выходом по напряжению | en | (AMB) voltage control |
fr | commande de tension (PMA) | |
5.6 ток смещения | en | AMB bias current |
fr | courant de polarisation du PMA | |
5.7 класс работы усилителя мощности: Значение тока смещения, определяющее условия работы усилителя мощности в режиме управления по току: | en | operation class of AMB power amplifier |
- класс А: - класс В: - класс С: ток смещения отсутствует (см. рисунки 12 и 14) | fr | classe de fonctionnement de l'amplificateur de puissance du PMA |
5.8 отрицательная позиционная жесткость | en | negative position stiffness |
Примечание - Эта величина имеет отрицательное значение. | fr | raideur |
5.9 динамическая жесткость системы с обратной связью: Частотная характеристика АМП с замкнутой системой управления, определяемая отношением | en | closed-loop dynamic system stiffness |
fr | raideur dynamique du |
|
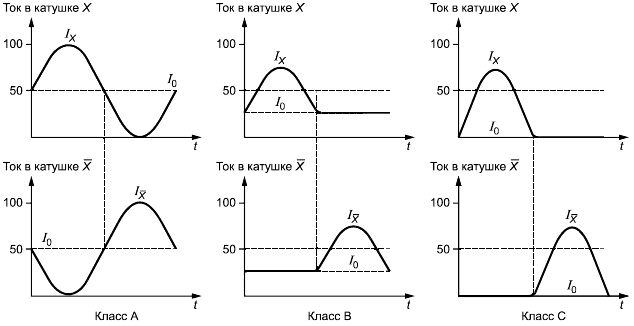
Рисунок 14 - Класс работы усилителя мощности (токи в катушках противоположных полюсов электромагнита)
5.10 динамическая податливость системы с обратной связью: Величина, обратная к динамической жесткости системы с обратной связью, т.е. | en | closed-loop dynamic system compliance |
fr | souplesse dynamique du | |
5.11 динамическая жесткость АМП с разомкнутой системой управления: Частотная характеристика, | en | open-loop AMB dynamic stiffness |
Примечание - Действительная часть комплексного отношения | fr | raideur dynamique du PMA en boucle ouverte |
5.12 многосвязанное управление АМП: Организация управления АМП, связывающая входы и выходы контроллеров для разных степеней свободы движения ротора. | en | (AMB) centralized control |
Примеры - Под эту категорию подпадают способы управления, использующие: | fr | commande |
5.13 раздельное управление АМП: Организация управления АМП, при которой отсутствуют связи входов и выходов контроллеров для разных степеней свободы движения ротора | en | (AMB) decentralized control |
fr | commande | |
5.14 регулировка АМП: Коррекция передаточной функции контроллера для обеспечения заданных условий работы ротора в АМП | en | (AMB) tuning process |
fr | processus de mise au point (PMA) | |
5.15 управление с компенсацией дисбаланса: Способ управления, при котором происходят автоматическое определение и компенсация неуравновешенных сил, действующих на ротор, с соответствующим снижением вибрации ротора. | en | peak-of-gain control; unbalance force counteracting control |
Примечание - Противодействующая сила передается через АМП на фундамент (см. рисунок 15). В результате силы, создаваемые в АМП, уменьшают вибрацию вала, включая его биения относительно геометрической оси. | fr | commande de |
5.16 управление с подавлением дисбаланса: Способ управления, при котором сохраняется вращение ротора вокруг его основной оси инерции, но уменьшаются силы, обусловленные дисбалансом ротора и передаваемые через АМП на корпус подшипника, и вибрация корпуса подшипника (см. рисунок 16). | en | imbalance force rejection control; unbalance force rejection control |
Примечание - Данное управление играет ту же роль, что и система автоматической балансировки. | fr | commande de |
|
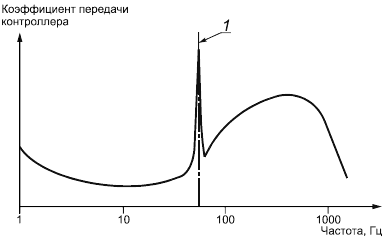
1 - частота вращения ротора
Рисунок 15 - Пример зависимости коэффициента передачи контроллера от частоты в системе управления с компенсацией дисбаланса
|
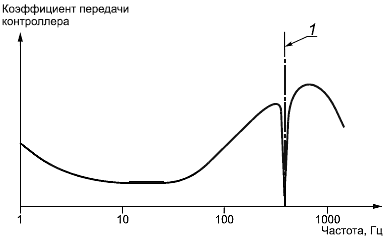
1 - частота вращения ротора
Рисунок 16 - Пример зависимости коэффициента передачи контроллера от частоты в системе управления с подавлением дисбаланса
6 Термины, относящиеся к вспомогательному оборудованию
6.1 страховочный подшипник: Вспомогательный подшипник в системе АМП, предназначенный для ограничения перемещений ротора и предотвращения его контакта с поверхностью статора АМП | en | auxiliary bearing; emergency bearing; retainer bearing; touch-down bearing |
fr | palier auxiliaire; palier de secours; palier de retenue; palier atterrisseur | |
6.2 зазор в страховочном подшипнике: Половина разности между внутренним диаметром радиального страховочного подшипника и внешним диаметром цапфы ротора в этом подшипнике или осевой зазор между торцевой поверхностью упорного страховочного подшипника и заплечиком вала (см. | en | auxiliary bearing; emergency bearing; retainer bearing; touch-down bearing |
Примечание - Эти зазоры должны быть меньше, чем зазор между ротором и статором в соответствующем направлении для всех частей системы "ротор - опора". | fr | palier auxiliaire; palier de secours; palier de retenue; palier atterrisseur |
6.3 испытание на контакт: Испытание, в ходе которого ротор, вращающийся на заданной частоте, намеренно опускают на страховочный подшипник для проверки качества функционирования последнего | en | touch-down test |
fr | essai d'atterrissage | |
6.4 резервное питание: Источник, обеспечивающий АМП электрической энергией в случае выхода из строя основной системы питания | en | back-up battery |
fr | batterie de secours |
Библиография
[1] | ISO 1925 Mechanical vibration - Balancing - Vocabulary |
[2] | ISO 2041 Mechanical vibration, shock and condition monitoring - Vocabulary |
УДК 534.322.3.08:006.354 | ОКС 01.040.17 | Т34 |
17.160 | ||
Ключевые слова: вибрация, активные магнитные подшипники, термины, определения | ||
Электронный текст документа
и сверен по:
, 2019
{kind=link}