ГОСТ Р 60.0.0.5-2019/ИСО 19649:2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МОБИЛЬНЫЕ РОБОТЫ
Термины и определения
Robots and robotic devices. Mobile robots. Terms and definitions
ОКС 01.040.25
25.040.30
ОКПД2 28.99.39.190
Дата введения 2020-03-25
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 17 октября 2019 г. N 1019-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 19649:2017* "Мобильные роботы - Словарь" (ISO 19649:2017 "Mobile robots - Vocabulary", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на мобильные платформы и мобильных роботов. Он идентичен международному стандарту ИСО 19649:2017, разработанному техническим комитетом ИСО/ТК 299 "Робототехника".
1 Область применения
Настоящий стандарт определяет термины, относящиеся к мобильным роботам, которые перемещаются по твердой поверхности и работают в приложениях, связанных как с промышленными роботами, так и с сервисными роботами. Он определяет термины, используемые для описания мобильности, передвижения и других аспектов, связанных с мобильными роботами.
2 Нормативные ссылки
В настоящем стандарте нормативные ссылки отсутствуют.
3 Термины и определения
В настоящем стандарте применены приведенные ниже термины и определения. ИСО и МЭК поддерживают терминологические базы данных для использования в документах по стандартизации по следующим адресам:
- платформа ИСО для онлайн-просмотра доступна по адресу http://www.iso.org/obp;
- Electropedia МЭК доступна по адресу http://www.electropedia.org.
3.1 Общие термины, относящиеся к мобильным роботам
3.1.1
мобильный робот (mobile robot): Робот, способный передвигаться под своим собственным управлением. Примечание - Мобильный робот может быть мобильной платформой (3.1.2) с манипуляторами или без них*. ________________ * Помимо манипуляторов на мобильной платформе может быть установлена и другая целевая нагрузка, соответствующая функциональному назначению мобильного робота, например грузовая платформа, функциональный модуль и др. [ИСО 8373:2012, статья 2.13] |
3.1.2
мобильная платформа (mobile platform): Совокупность всех компонентов мобильного робота (3.1.1), обеспечивающих его передвижение (3.1.10). Примечания 1 Мобильная платформа может включать шасси, которое может быть использовано для поддержки нагрузки. 2 Из-за возможной путаницы с термином "основание" не рекомендуется использовать термин "мобильное основание" для обозначения мобильной платформы. [ИСО 8373:2012, статья 3.18] |
3.1.3 мобильность (mobility): Способность мобильной платформы (3.1.2) перемещаться во внешней среде.
Примечание - Мобильность может быть использована в качестве меры, например всенаправленный мобильный механизм (3.3.6) обычно обладает более высокой мобильностью, чем колесный механизм с дифференциальным приводом (3.3.7).
3.1.4 руление (steering): Управление направлением передвижения мобильной платформы (3.1.2).
3.1.5
конфигурация (configuration): Совокупность значений положения всех шарниров, которая полностью определяет геометрию робота в любой момент времени. [ИСО 8373:2012, статья 3.5] |
3.1.6 начальная конфигурация (эталонная конфигурация) [alignment configuration (reference configuration)]: Заданная конфигурация (3.1.5) мобильной платформы (3.1.2), определенная изготовителем.
Пример - Конфигурация с нулевым углом поворота рулевых колес для колесного робота, заданная конфигурация спокойного стояния шагающего робота.
3.1.7
поверхность перемещения (travel surface): Поверхность, по которой перемещается мобильный робот (3.1.1). [ИСО 8373: 2012, статья 7.7] |
3.1.8 площадь контакта с поверхностью перемещения (площадь контакта с землей) [travel surface contact area (ground contact area)]: Площадь соприкосновения одного или нескольких колес, гусениц или ног, одновременно находящихся в контакте с поверхностью перемещения (3.1.7).
3.1.9 опорный многоугольник (support polygon): Выпуклая оболочка всех площадей контакта с поверхностью перемещения (3.1.8).
3.1.10 передвижение (locomotion): Автономное перемещение мобильной платформы (3.1.2).
3.1.11 турель (turret): Вращающаяся конструкция, установленная на мобильной платформе (3.1.2) для обеспечения независимой ориентации закрепленным на ней устройствам.
3.2 Термины, относящиеся к передвижению
3.2.1 подвеска (suspension): Система или конструкция, которая предназначена для погашения колебаний и смягчения ударов от поверхности перемещения (3.1.7).
Примечание - Назначением подвески может быть поддержание устойчивости мобильной платформы (3.1.2) и преодоление шероховатости поверхности перемещения путем поддержания контакта с поверхностью перемещения.
3.2.2 активная подвеска (active suspension): Подвеска (3.2.1), демпфирующими и/или пружинящими характеристиками которой можно управлять.
3.2.3 точка нулевого момента (Zero Moment Point, ZMP): Точка на опорном многоугольнике (3.1.9), относительно которой результирующий момент всех сил, приложенных к мобильному роботу (3.1.1) от поверхности перемещения (3.1.7), имеет нулевые составляющие в горизонтальном направлении.
Примечание - При этом считается, что поверхность перемещения расположена горизонтально.
3.3 Термины, относящиеся к колесным роботам
3.3.1 управляемое колесо (рулевое колесо) [steer wheel (steered wheel)]: Колесо, ориентацией которого регулируется изменение направления перемещения.
3.3.2 ведущее колесо (приводное колесо) [drive wheel (driving wheel)]: Колесо, приводящее в движение мобильную платформу (3.1.2).
3.3.3 ведомое колесо (неприводное колесо, поддерживающее колесо) [idler wheel (follower, trailing wheel)]: Колесо, которое не приводит в движение мобильную платформу (3.1.2) и активно не управляется.
3.3.4 (поворотная) роликовая опора [(swivel) castor]: Сборочная единица, включающая один или несколько роликов в корпусе, который свободно вращается вокруг вертикальной оси, имеющей горизонтальное смещение относительно оси вращения роликов.
3.3.5 всенаправленное колесо (omni-directional wheel): Колесо с роликами, установленными на его наружной поверхности, которые обеспечивают перемещение в любом направлении, даже перпендикулярно самому колесу.
Пример - Омни-колеса (ролики ориентированы под углом 90° к оси колеса), меканум-колеса (ролики ориентированы под углом 45° к оси колеса).
Примечание - Всенаправленный мобильный механизм (3.3.6) часто конструируется с использованием трех и более всенаправленных колес.
3.3.6
всенаправленный мобильный механизм (omni-directional mobile mechanism): Колесный механизм, обеспечивающий перемещение мобильного робота (3.1.1) в любом направлении. [ИСО 8373:2012, статья 3.19] |
3.3.7 дифференциальный привод (differential drive): Система взаимосвязанных устройств, обеспечивающая независимое управление ведущими колесами (3.3.2), расположенными на одной геометрической оси, при котором скорости вращения колес обеспечивают поступательное перемещение, а разность скоростей обеспечивает поворот.
Примечание - Данный термин применим и к гусеничным роботам.
3.4 Термины, относящиеся к шагающим роботам
3.4.1 походка (gait): Схема циклического движения ног при передвижении (3.1.10) шаганием.
3.4.2 длина шага (шаг) [stride length (stride)]: Расстояние, на которое перемещается шагающий робот за один цикл походки (3.4.1).
3.4.3 период походки (период ходьбы) [gait period (walking period)]: Время одного цикла походки (3.4.1).
3.4.4 фаза ноги (leg phase): Отношение промежутка времени между началом состояния переноса (3.4.6) данной ноги и началом состояния переноса базовой ноги к периоду ходьбы (3.4.3).
3.4.5 состояние опоры (состояние стояния) [support state (stance state)]: Состояние ноги, при котором нога находится в контакте с поверхностью перемещения (3.1.7).
3.4.6 состояние переноса (состояние возврата в исходное положение, состояние перемещения) [swing state (recovery state, transfer state)]: Состояние ноги, при котором нога не находится в контакте с поверхностью перемещения (3.1.7).
3.4.7 коэффициент состояния опоры (duty factor): Отношение длительности состояния опоры (3.4.5) ноги к периоду ходьбы (3.4.3).
3.4.8 диаграмма походки (gait diagram): Диаграмма циклического движения ног во времени при передвижении (3.1.10) шаганием.
Пример - Диаграмма медленной походки (3.4.1) четвероногого робота показана на рисунке A.1.
3.5 Термины, относящиеся к перемещению
3.5.1 сила реакции поверхности перемещения (сила реакции земли) [travel surface reaction force (ground reaction force)]: Усилие, прилагаемое к мобильной платформе (3.1.2) от поверхности перемещения (3.1.7) через зону контакта с поверхностью перемещения (3.1.8).
3.5.2 контактное давление на поверхность перемещения (контактное давление на землю) [travel surface contact pressure (ground contact pressure)]: Давление, оказываемое колесами, гусеницами или ногами мобильной платформы (3.1.2) на поверхность перемещения (3.1.7) через зону контакта с поверхностью перемещения (3.1.8).
3.5.3 опрокидывающий момент (overturning moment): Минимальный момент, необходимый для того, чтобы опрокинуть мобильного робота (3.1.1) из статически устойчивого пространственного расположения (3.6.1).
Примечание - Данный момент зависит от состояния поверхности, например, уклона.
3.5.4 тяговое усилие (traction): Максимальная сила трения, которая может быть создана между поверхностью перемещения (3.1.7) и колесами, гусеницами или ногами мобильного робота (3.1.1).
3.5.5
система координат мобильной платформы (mobile platform coordinate system): Система координат, привязанная к одному из фиксированных компонентов мобильной платформы (3.1.2). [ИСО 8373:2012, статья 4.7.6] |
Примечание* - ИСО 9787:2013, статья 5.5, определяет систему координат мобильной платформы, ![]() . Начало системы координат мобильной платформы,
. Начало системы координат мобильной платформы, ![]() , является нулевой точкой мобильной платформы. Ось +
, является нулевой точкой мобильной платформы. Ось +![]() направлена к переднему краю мобильной платформы. Ось +
направлена к переднему краю мобильной платформы. Ось +![]() направлена вверх от мобильной платформы (рисунок А.2).
направлена вверх от мобильной платформы (рисунок А.2).
________________
* Данное примечание заменяет примечание к ИСО 8373:2012, статья 4.7.6.
3.5.6 угол поворота колеса (steer angle): Угловое смещение оси управляемого колеса (3.3.1) вокруг оси +![]() .
.
Примечание - Угол поворота колеса обычно равен нулю, когда ось колеса совпадает с направлением оси ![]() мобильной платформы (3.1.2).
мобильной платформы (3.1.2).
3.5.7 перемещение вперед (forward travel): Движение мобильной платформы (3.1.2) по направлению оси +-![]() .
.
Примечание - См. система координат мобильной платформы (3.5.5).
3.5.8 перемещение назад (обратное перемещение) [reverse travel (backward travel)]: Движение мобильной платформы (3.1.2) по направлению оси -![]() .
.
Примечание - См. система координат мобильной платформы (3.5.5).
3.5.9 поперечное перемещение (траверс) [lateral travel (traverse)]: Движение мобильной платформы (3.1.2) по направлению оси ![]() .
.
Примечание - См. система координат мобильной платформы (3.5.5).
3.5.10 диагональное перемещение (diagonal travel): Движение мобильной платформы (3.1.2), являющееся комбинацией перемещения вперед (3.5.7) или перемещения назад (3.5.8) и поперечного перемещения (3.5.9).
3.5.11 всенаправленное перемещение (omni-directional travel): Движение мобильной платформы (3.1.2), направление которого может быть незамедлительно и произвольно изменено с помощью всенаправленного мобильного механизма (3.3.6).
3.5.12
поворот (turning): Движение мобильной платформы (3.1.2), вызывающее изменение ориентации системы координат мобильной платформы (3.5.5). Примечание - Поворот обычно сопровождается изменением направления движения мобильной платформы. [ИСО 18646-1:2016, статья 3.12] |
Примечание - В таблице А.1 приведено сравнение поворота, поворота вокруг точки контакта (3.5.13) и вращения (3.5.14).
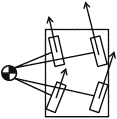
3.5.13 поворот вокруг точки контакта (поворачивание) [pivot turning (pivoting)]: Вращение с поступательным перемещением, во время которого точка контакта одного колеса, гусеницы или ноги остается на одном месте на поверхности перемещения (3.1.7) и определяет ось, вокруг которой осуществляется поворот (3.5.12).
Примечание - В таблице А.1 приведено сравнение поворота (3.5.12), поворота вокруг точки контакта и вращения (3.5.14).
3.5.14
поворот вращением (вращение) [spin turning (spinning)]: Вращение на месте или вращение вокруг начала координат мобильной платформы (3.1.2) без поступательного перемещения. [ИСО 18646-1:2016, статья 3.13] |
Примечание - В таблице А.1 приведено сравнение поворота (3.5.12), поворота вокруг точки контакта (3.5.13) и вращения.
3.5.15 радиус поворота (turning radius): Радиус кривизны траектории начала координат мобильной платформы (3.1.2).
3.5.16
ширина поворота (turning width): Минимальная ширина коридора, в пределах которого мобильная платформа (3.1.2) может выполнить конкретный вид поворота (3.5.12). [ИСО 18646-1:2016, статья 3.14] |
3.5.17 боковая реакция при повороте (cornering force): Сила, воздействующая на мобильного робота (3.1.1) за счет центробежной силы, возникающей при его движении на повороте.
3.5.18 контроль равновесия (управление равновесием) [balance control (balance management)]: Процесс поддержания статической и динамической устойчивости мобильного робота (3.1.1).
3.6 Термины, относящиеся к навигации
3.6.1
пространственное расположение (pose): Комбинация позиции и ориентации в пространстве. Примечания 1 Под пространственным расположением манипулятора обычно понимают позицию и ориентацию рабочего органа или механического интерфейса. 2 Пространственное расположение мобильного робота (3.1.1) может включать совокупность пространственных расположений мобильной платформы (3.1.2) и любого манипулятора, установленного на мобильной платформе, относительно глобальной системы координат. [ИСО 8373:2012, статья 4.5] |
3.6.2 одновременные локализация и построение карты (simultaneous localization and mapping, SLAM): Построение и уточнение карты внешней среды с использованием параметров частично построенной карты для распознавания пространственного расположения (3.6.1) мобильного робота (3.1.1), перемещающегося в данной среде.
3.6.3 наведение (guidance): Предоставление внешней информации для обеспечения навигации мобильного робота (3.1.1).
3.6.4 планирование маршрута (path planning): Планирование упорядоченного набора пространственных расположений (3.6.1) при перемещении.
3.6.5 планирование траектории (trajectory planning): Планирование маршрута (3.6.4) с учетом времени как параметра.
3.6.6 столкновение (collision): Динамический контакт, приводящий к обмену импульсами.
3.6.7 обход препятствий (obstacle avoidance): Предотвращение взаимодействия, такого как приближение, соприкосновение или столкновение (3.6.6), с препятствиями благодаря их обнаружению с помощью датчиков внешнего состояния и корректировки планирования траектории (3.6.5).
3.6.8 предотвращение столкновения (collision avoidance): Исключение возможности столкновения (3.6.6) с помощью датчиков внешнего состояния и надлежащего реагирования.
3.6.9 стыковка (docking): Процесс подхода и/или соединения со станцией, оборудованием или другой мобильной платформой (3.1.2) для выполнения поставленного задания.
Примечание - Примерами поставленных заданий являются зарядка аккумулятора, обмен данными и передача полезной нагрузки.
3.6.10 инерциальная навигационная система, ИНС (inertial navigation system, INS): Система, обрабатывающая данные от инерциальных датчиков для расчета пространственного расположения (3.6.1), линейных и угловых скоростей и ускорений мобильной платформы (3.1.2).
Примечание - ИНС обычно вычисляет пространственное расположение, линейные и угловые скорости и ускорения, используя инерциальный блок измерения (ИБИ), состоящий из гироскопа и акселерометра, а также, дополнительно, компаса.
3.6.11
счисление пути (dead reckoning): Метод вычисления пространственного расположения (3.6.1) мобильного робота (3.1.1) с использованием только внутренних измерений, начиная с известного исходного пространственного расположения. [ИСО 8373:2012, статья 7.8] |
3.6.12 одометрия (odometry): Метод измерения, использующий инкрементные данные о расстоянии от датчиков внутреннего состояния для оценки изменения положения с течением времени.
Примечание - Когда используются не только инкрементные данные о расстоянии, но и информация о направлении от компаса или инерциальной навигационной системы (3.6.10), то применение термина "счисление пути" (3.6.11) будет более правильным, чем применение термина "одометрия".
Приложение А
(справочное)
Примеры
|
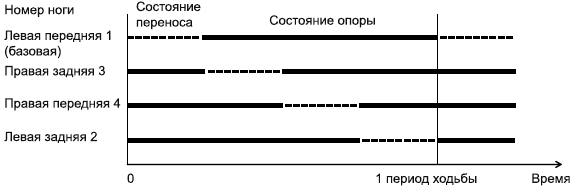
Коэффициент состояния опоры для всех ног равен 0,75.
Фазы ног 2, 3 и 4 равны 0,75, 0,25 и 0,5, соответственно.
Рисунок А.1 - Диаграмма типичной медленной походки
|
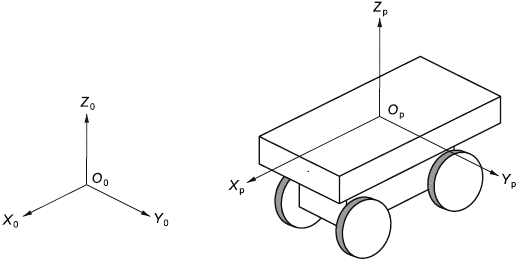
Рисунок А.2 - Пример системы координат мобильной платформы
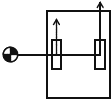
Таблица А.1 - Сравнение поворота, поворота вокруг точки контакта и вращения
Тип привода | Поворот | Поворот | Поворот вокруг точки контакта | Вращение |
Дифференциальный привод |
|
|
|
|
Всенаправленный привод |
|
|
|
|
Описание поворота | Поворот с перемещением | Поворот | Специальный поворот, когда одна из точек контакта с поверхностью является центром вращения | Поворот без перемещения |






Алфавитный указатель терминов на русском языке
вращение | 3.5.14 |
давление на землю контактное | 3.5.2 |
давление на поверхность перемещения контактное | 3.5.2 |
диаграмма походки | 3.4.8 |
длина шага | 3.4.2 |
ИНС | 3.6.10 |
колесо ведомое | 3.3.3 |
колесо ведущее | 3.3.2 |
колесо всенаправленное | 3.3.5 |
колесо неприводное | 3.3.3 |
колесо поддерживающее | 3.3.3 |
колесо приводное | 3.3.2 |
колесо рулевое | 3.3.1 |
колесо управляемое | 3.3.1 |
контроль равновесия | 3.5.18 |
конфигурация | 3.1.5 |
конфигурация начальная | 3.1.6 |
конфигурация эталонная | 3.1.6 |
коэффициент состояния опоры | 3.4.7 |
локализация и построение карты одновременные | 3.6.2 |
механизм мобильный всенаправленный | 3.3.6 |
многоугольник опорный | 3.1.9 |
мобильность | 3.1.3 |
момент опрокидывающий | 3.5.3 |
наведение | 3.6.3 |
обход препятствий | 3.6.7 |
одометрия | 3.6.12 |
опора роликовая | 3.3.4 |
опора роликовая поворотная | 3.3.4 |
передвижение | 3.1.10 |
перемещение вперед | 3.5.7 |
перемещение всенаправленное | 3.5.11 |
перемещение диагональное | 3.5.10 |
перемещение назад | 3.5.8 |
перемещение обратное | 3.5.8 |
перемещение поперечное | 3.5.9 |
период походки | 3.4.3 |
период ходьбы | 3.4.3 |
планирование маршрута | 3.6.4 |
планирование траектории | 3.6.5 |
платформа мобильная | 3.1.2 |
площадь контакта с землей | 3.1.8 |
площадь контакта с поверхностью перемещения | 3.1.8 |
поверхность перемещения | 3.1.7 |
поворачивание | 3.5.13 |
поворот | 3.5.12 |
поворот вокруг точки контакта | 3.5.13 |
поворот вращением | 3.5.14 |
подвеска | 3.2.1 |
подвеска активная | 3.2.2 |
походка | 3.4.1 |
предотвращение столкновения | 3.6.8 |
привод дифференциальный | 3.3.7 |
радиус поворота | 3.5.15 |
расположение пространственное | 3.6.1 |
реакция при повороте боковая | 3.5.17 |
робот мобильный | 3.1.1 |
руление | 3.1.4 |
сила реакции земли | 3.5.1 |
сила реакции поверхности перемещения | 3.5.1 |
система координат мобильной платформы | 3.5.5 |
система навигационная инерциальная | 3.6.10 |
состояние возврата в исходное положение | 3.4.6 |
состояние опоры | 3.4.5 |
состояние перемещения | 3.4.6 |
состояние переноса | 3.4.6 |
состояние стояния | 3.4.5 |
столкновение | 3.6.6 |
стыковка | 3.6.9 |
счисление пути | 3.6.11 |
точка нулевого момента | 3.2.3 |
траверс | 3.5.9 |
турель | 3.1.11 |
угол поворота колеса | 3.5.6 |
управление равновесием | 3.5.18 |
усилие тяговое | 3.5.4 |
фаза ноги | 3.4.4 |
шаг | 3.4.2 |
ширина поворота | 3.5.16 |
Алфавитный указатель эквивалентов терминов на английском языке
active suspension | 3.2.2 |
alignment configuration | 3.1.6 |
backward travel | 3.5.8 |
balance control | 3.5.18 |
balance management | 3.5.18 |
castor | 3.3.4 |
collision | 3.6.6 |
collision avoidance | 3.6.8 |
configuration | 3.1.5 |
cornering force | 3.5.17 |
dead reckoning | 3.6.11 |
diagonal travel | 3.5.10 |
differential drive | 3.3.7 |
docking | 3.6.9 |
drive wheel | 3.3.2 |
driving wheel | 3.3.2 |
duty factor | 3.4.7 |
follower | 3.3.3 |
forward travel | 3.5.7 |
gait | 3.4.1 |
gait diagram | 3.4.8 |
gait period | 3.4.3 |
ground contact area | 3.1.8 |
ground contact pressure | 3.5.2 |
ground reaction force | 3.5.1 |
guidance | 3.6.3 |
idler wheel | 3.3.3 |
inertial navigation system | 3.6.10 |
INS | 3.6.10 |
lateral travel | 3.5.9 |
leg phase | 3.4.4 |
locomotion | 3.1.10 |
mobile platform | 3.1.2 |
mobile platform coordinate system | 3.5.5 |
mobile robot | 3.1.1 |
mobility | 3.1.3 |
obstacle avoidance | 3.6.7 |
odometry | 3.6.12 |
omni-directional mobile mechanism | 3.3.6 |
omni-directional travel | 3.5.11 |
omni-directional wheel | 3.3.5 |
overturning moment | 3.5.3 |
path planning | 3.6.4 |
pivot turning | 3.5.13 |
pivoting | 3.5.13 |
pose | 3.6.1 |
recovery state | 3.4.6 |
reference configuration | 3.1.6 |
reverse travel | 3.5.8 |
simultaneous localization and mapping | 3.6.2 |
SLAM | 3.6.2 |
spin turning | 3.5.14 |
stance state | 3.4.5 |
spinning | 3.5.14 |
steer angle | 3.5.6 |
steer wheel | 3.3.1 |
steered wheel | 3.3.1 |
steering | 3.1.4 |
stride | 3.4.2 |
stride length | 3.4.2 |
support polygon | 3.1.9 |
support state | 3.4.5 |
suspension | 3.2.1 |
swing state | 3.4.6 |
swivel castor | 3.3.4 |
traction | 3.5.4 |
trailing wheel | 3.3.3 |
trajectory planning | 3.6.5 |
transfer state | 3.4.6 |
travel surface | 3.1.7 |
travel surface contact area | 3.1.8 |
travel surface contact pressure | 3.5.2 |
travel surface reaction force | 3.5.1 |
traverse | 3.5.9 |
turning | 3.5.12 |
turning radius | 3.5.15 |
turning width | 3.5.16 |
turret | 3.1.11 |
walking period | 3.4.3 |
Zero Moment Point | 3.2.3 |
ZMP | 3.2.3 |
Библиография
[1] | ISO 8373:2012 |
________________ | |
[2] | ISO 9283 |
________________ | |
[3] | ISO 9787:2013 |
________________ | |
[4] | ISO 9946 |
________________ | |
[5] | ISO 13482 |
________________ | |
[6] | ISO 18646-1:2016 |
________________ | |
УДК 621.865.8:007.52:006.72 | ОКС 01.040.25 | ОКПД2 28.99.39.190 |
25.040.30 | ||
Ключевые слова: роботы, робототехнические устройства, мобильные роботы, термины и определения, робототехника | ||
Электронный текст документа
и сверен по:
, 2019
{kind=link}