ГОСТ ISO 6165-2015
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МАШИНЫ ЗЕМЛЕРОЙНЫЕ
Основные типы. Идентификация, термины и определения
Earth-moving machinery. Basic types. Identification and terms and definitions
МКС 01.040.53; 53.100
Дата введения 2025-01-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Государственным комитетом по стандартизации Республики Беларусь
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 27 февраля 2015 г. № 75-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Беларусь | ВY | Госстандарт Республики Беларусь |
Киргизия | КG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 26 января 2024 г. № 128-ст межгосударственный стандарт ГОСТ ISO 6165-2015 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2025 г.
5 Настоящий стандарт идентичен международному стандарту ISO 6165:2012* "Машины землеройные. Основные типы. Идентификация, термины и определения" ("Earth-moving machinery - Basic types - Identifcation and terms and defnitions", IDT).
Международный стандарт разработан техническим комитетом ISO/TC 127 "Землеройные машины" Международной организации по стандартизации (ISO).
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
1 Область применения
Настоящий стандарт устанавливает термины и определения, а также структуру идентификации для классификации землеройных машин, предназначенных для выполнения следующих операций:
- выемки;
- погрузки;
- транспортирования;
- бурения, распределения, уплотнения, срезания или выемки земли, скального грунта и других материалов при проведении работ, например на дорогах или дамбах, в карьерах или выработках, а также на строительных площадках.
Настоящий стандарт предназначен для обеспечения четкой идентификации машин в соответствии с их функциональным назначением и конструктивными особенностями.
В приложении А приведена процедура, основанная на идентификационной структуре, используемой в настоящем стандарте для классификации машин и для введения детальной идентификации в соответствии с логикой построения этой структуры.
В приложении В приведена иерархическая структура конфигураций органов управления землеройных машин.
В библиографии приведен перечень терминологических стандартов для многих машин семейства, идентифицируемых в соответствии с настоящим стандартом. Эти терминологические стандарты включают описание и изображение различных конфигураций типов машин в каждом семействе.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт [для датированной ссылки применяют только указанное издание ссылочного стандарта, для недатированной - последнее издание (включая все изменения)]:
ISO 10261:2002 Earth-moving machinery - Product identifcation numbering system (Машины землеройные. Система обозначения идентификационного номера изделия)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 землеройная машина (earth-moving machinery): Самоходная или прицепная машина на гусеничном, колесном или шагающем ходу, имеющая рабочее оборудование (3.9) и/или сменное оборудование (3.10) (рабочий орган), предназначенная преимущественно для выполнения работ по выемке, погрузке, транспортированию, бурению, распределению, срезанию и уплотнению земли, скального грунта и других материалов, а также прокладыванию в них траншей.
Примечание - Управление землеройной машиной осуществляется либо непосредственно оператором, который находится на машине или рядом с ней, либо дистанционно, когда оператор использует проводную или беспроводную систему управления, находясь в зоне прямой видимости на рабочей площадке или вне ее. Типы конфигураций органов управления оператора приведены в приложении В.
3.1.1 малогабаритная машина (compact machine): Землеройная машина (3.1), кроме мини-экскаватора (4.4.4) и мини-погрузчика (4.2.3), имеющая эксплуатационную массу (3.7) не более 4500 кг.
3.2 машина прямого управления (direct-control machine): Самоходная землеройная машина (3.1), управление которой осуществляется посредством физического контакта оператора с машиной.
3.2.1 машина с рабочим местом оператора (ride-on machine): Самоходная машина прямого управления (3.2), органы управления которой размещены на машине и управление осуществляется сидящим или стоящим оператором.
3.2.2 машина без рабочего места оператора (non-riding machine): Самоходная машина прямого управления (3.2), органы управления которой размещены на машине и управление осуществляется рядом идущим оператором (не сидящим и не стоящим на машине).
3.3 машина дистанционного управления (remote-control machine): Самоходная землеройная машина (3.1), управление которой осуществляется посредством передачи сигналов с пульта управления (передатчика) не размещенного на машине к принимающему устройству (приемнику), размещенному на машине.
Примечание - Дистанционное управление может быть проводным или беспроводным.
3.3.1 машина с проводным управлением (wire-controlled machine): Самоходная машина дистанционного управления (3.3), управление которой осуществляется посредством передачи по проводам сигналов с управляемого оператором устройства, находящегося на расстоянии от машины.
Примечание - Как правило, машины с проводным управлением используются в зоне прямой видимости на рабочей площадке.
3.3.2 машина с беспроводным управлением (wireless-controlled machine): Самоходная машина дистанционного управления (3.3), управление которой осуществляется посредством передачи сигналов с управляемого оператором устройства, находящегося на расстоянии от машины.
Примечание - Машины с беспроводным управлением используются и в зоне прямой видимости на рабочей площадке и вне ее.
3.4 семейство машин (machine family): Группа машин, сконструированная для выполнения однотипных операций.
Примечание - Землеройные машины (3.1) включают следующие семейства машин:
- бульдозеры (4.1);
- погрузчики (4.2);
- экскаваторы-погрузчики (4.3);
- экскаваторы (4.4);
- траншеекопатели (4.5);
- землевозы (4.6);
- скреперы (4.7);
- автогрейдеры (4.8);
- уплотняющие машины (4.9);
- катки (4.10);
- трубоукладчики (4.11);
- машины горизонтального бурения (4.12);
- малогабаритные самоходные шасси (4.13).
3.5 модель машины; тип машины (machine model; machine type): Обозначение машины или семейства машин (3.4) их изготовителем.
Примечание - Семейство машин может включать несколько моделей или типов, обозначение которых указывается изготовителем машины.
3.6 индивидуальная машина (individual machine): Каждая изготовленная машина, которая имеет собственный идентификационный номер.
Примечание - Идентификационный номер изделия (PIN) в соответствии с ISO 10261 четко идентифицирует индивидуальную машину.
3.7 эксплуатационная масса (operating mass): Масса базовой машины (3.8), с рабочим оборудованием (3.9) и порожним сменным оборудованием (3.10) в наиболее тяжелом сочетании по массе элементов машины, определенных изготовителем, оператором (75 кг), полностью заполненным топливным баком и заполненными до уровня, установленного изготовителем, всеми жидкостными системами (то есть, гидравлическая жидкость, трансмиссионное масло, моторное масло, охлаждающая жидкость) и, если установлена система смачивания, то наполовину заполненным баком для воды. (ISO 6016:2008, 3.2.1)
Примечание 1 - Масса оператора не учитывается для машин без рабочего места оператора.
Примечание 2 - По требованию изготовителя может быть учтена масса устанавливаемых балластных грузов.
3.8 базовая машина (base machine): Машина с кабиной или навесом и устройствами защиты оператора, если они необходимы, без рабочего оборудования (3.9) или сменного оборудования (3.10), но оснащенная необходимыми приспособлениями для установки такого рабочего оборудования и сменного оборудования (рабочих органов). (ISO 6746-2:2003, 3.3)
3.9 рабочее оборудование (equipment): Комплект составных частей, монтируемых на базовую машину (3.8) для обеспечения выполнения сменным оборудованием (3.10) ее основной функции в соответствии с назначением. (ISO 6746-2:2003, 3.4)
3.10 сменное оборудование (attachment): Сборочные узлы, которые могут быть установлены на базовую машину (3.8) или рабочее оборудование (3.9) для специального использования. (ISO 6746-2:2003, 3.5)
3.11 производные машины (derivative machines)
3.11.1 производная землеройная машина (derivative earth-moving machinery): Землеройная машина (3.1), которая соединяет в себе свойства других землеройных машин семейства (3.4), в различных конфигурациях или компоновках.
Пример - Машина, имеющая фронтальное погрузочное оборудование и не самозагружающийся кузов землевоза, установленный сзади.
3.11.2 производная вспомогательная машина, используемая на рабочих площадках (derivative support machinery used on earth-moving worksite): Машина, полученая из землеройной машины семейства (3.4) путем создания различных конфигураций или компоновок для различного использования, преимущественно предназначенная для подготовки рабочих площадок для проведения землеройных работ или других строительных плошадок.
Пример - Землевоз с шарнирно-сочлененной рамой со снятым кузовом и установленным вместо него баком для воды для смачивания дороги или резервуаром для топлива/смазки.
Примечание - Такие вспомогательные машины обычно используются для подготовки рабочих площадок или при проведении технического обслуживания машин.
4 Семейства машин
4.1 бульдозер (dozer): Самоходная гусеничная или колесная машина с рабочим оборудованием (3.9), имеющая либо бульдозерное сменное оборудование (3.10), которое срезает, перемещает и распределяет материал за счет напорного усилия при движении машины вперед, либо навесное оборудование, используемое для реализации напорного или тягового усилия.
4.2 погрузчик (loader): Самоходная гусеничная или колесная машина с фронтальным рабочим оборудованием (3.9), предназначенная главным образом для погрузочных операций (использование ковша) посредством загрузки или копания грунта при движении машины вперед.
Примечание - Рабочий цикл погрузчика включает черпание, подъем, транспортирование и разгрузку материала.
4.2.1 поворотный погрузчик (swing loader): Погрузчик (4.2), имеющий подъемную стрелу, которая может поворачиваться влево и вправо от прямолинейного положения.
Примечание - Рабочий цикл поворотного погрузчика аналогичен рабочему циклу погрузчика, но дополнительно работа может быть выполнена рабочим оборудованием (3.9), смещенным от продольной оси машины.
4.2.2 погрузчик с бортовым поворотом (skid steer loader): Погрузчик (4.2) с постом оператора, расположенным между или в стороне от опорной(ых) конструкции(й) рабочего оборудования, и управляемый посредством изменения скорости и (или) направления вращения колес (гусениц) на противоположных сторонах машины, и имеющий фиксированные оси.
4.2.3 мини-погрузчик (compact loader): Погрузчик (4.2), имеющий эксплуатационную массу (3.7) не более 4500 кг - для колесного погрузчика и не более 6000 кг - для гусеничного погрузчика, предназначенный для работы в стесненных условиях, требующих большой мобильности.
4.3 экскаватор-погрузчик (backhoe loader): Самоходная колесная или гусеничная машина с главной рамой, предназначенной для навески рабочего оборудования (3.9) спереди и обратной лопаты сзади (обычно с аутригерами или стабилизаторами).
Примечание 1 - При работе в режиме экскаватора машина неподвижна и обычно копает ниже уровня земли.
Примечание 2 - При работе в режиме погрузчика (использование ковша) загрузка осуществляется при движении машины вперед.
Примечание 3 - Рабочий цикл в режиме экскаватора включает в себя следующие операции: копание, подъем, перемещение с поворотом и разгрузку материала. Рабочий цикл в режиме погрузчика включает в себя следующие операции: наполнение, подъем, транспортирование и разгрузку материала.
4.4 экскаватор (excavator): Самоходная машина на колесном, гусеничном или шагающем ходу, имеющая верхнюю часть, способную поворачиваться на 360°, со смонтированным рабочим оборудованием (3.9), предназначенная, главным образом, для копания с помощью ковша без перемещения ходовой части в течение всего рабочего цикла машины.
Примечание 1 - Рабочий цикл экскаватора включает в себя следующие операции: копание, подъем, перемещение с поворотом и разгрузку материала.
Примечание 2 - Экскаватор также может использоваться для погрузки-разгрузки и перемещения материалов или предметов.
Примечание 3 - Под экскаватором, как правило, понимают гидравлический экскаватор, за исключением специально определенных канатных экскаваторов (4.4.3).
4.4.1 экскаватор с минимальным радиусом поворота (MSRX) (minimal swing radius excavator (MSRX): Экскаватор (4.4), предназначенный для работы в стесненных условиях, имеющий поворотную платформу с малым радиусом поворота (рабочее (3.9) и сменное (3.10) оборудование поворачиваются в пределах 120% ширины ходовой части).
4.4.2 шагающий экскаватор (walking excavator): Экскаватор (4.4), имеющий три и более опор; опоры могут быть шарнирно-сочлененными и/или телескопическими и могут оснащаться колесами.
4.4.3 канатный экскаватор (cable excavator): Экскаватор (4.4), имеющий поворотную платформу с канатным приводом рабочего оборудования, предназначенный, главным образом, для копания плотных или уплотненных материалов с помощью драглайна, прямой лопаты или грейферного захвата, выполнения работ по разрушению с помощью крюка или шара, а также выполнению погрузочно-разгрузочных работ с помощью специального рабочего (3.9) и сменного (3.10) оборудования.
4.4.4 мини-экскаватор (compact excavator): Экскаватор (4.4), имеющий эксплуатационную массу (3.7) не более 6000 кг.
4.5 траншеекопатель (trencher): Самоходная гусеничная или колесная машина с установленным спереди или сзади рабочим (3.9) или сменным (3.10) оборудованием, предназначенным главным образом для прокладки траншей при непрерывной работе за счет движения машины.
Примечание - Рабочим оборудованием являются: цепь, ротор, фреза, плужный отвал или другое аналогичное оборудование.
4.6 землевоз (dumper): Самоходная или прицепная гусеничная или колесная машина с открытым кузовом, предназначенная для транспортирования, разгрузки и распределения материала, загрузка которой осуществляется внешними средствами.
Примечание - Мини-землевоз может иметь встроенное самозагружающее устройство.
4.6.1 землевоз с жесткой рамой (rigid-frame dumper): Землевоз (4.6), имеющий жесткую раму с управляемыми колесами или гусеницами.
4.6.2 землевоз с шарнирно-сочлененной рамой (articulated-frame dumper): Землевоз (4.6), имеющий шарнирно-сочлененную раму, с помощью которой осуществляется управление землевозом.
4.6.3 поворотный землевоз (swing dumper): Землевоз (4.6) на колесном или гусеничном шасси, имеющий поворачивающуюся на 360° верхнюю часть, которая включает в себя жесткую раму, открытый кузов и пост оператора.
4.6.4 прицепной землевоз (towed dumper, towed wagon): Несамоходный землевоз (4.6), приводимый в движение буксирующей машиной, на которой расположено рабочее место оператора.
Примечание - Прицепной землевоз может выполнять свою функцию различными способами (например, осуществлять боковую, нижнюю или заднюю разгрузку, или разгрузку с использованием разгрузочного устройства).
4.7 скрепер (scraper): Самоходная или прицепная гусеничная или колесная машина, имеющая открытый ковш с режущей кромкой, расположенный между передней и задней осями, который срезает, загружает, транспортирует, выгружает и распределяет материал при движении вперед.
Примечание - Снабженный приводом механизм элеваторной загрузки, установленный на ковше скрепера, может способствовать загрузке материала при движении машины вперед.
4.7.1 прицепной скрепер (towed scraper): Несамоходный скрепер (4.7), приводимый в движение буксирующей машиной, на которой расположено рабочее место оператора.
4.8 автогрейдер (grader): Самоходная колесная машина с регулируемым отвалом, расположенным между передней и задней осями, которая также может быть оборудована передним отвалом или рыхлителем, установленным между передней и задней осями.
Примечание - Автогрейдер предназначен главным образом для профилирования, срезания склонов, засыпки канав и рыхления материалов при движении машины вперед.
4.9 уплотняющая машина (landfill compactor): Самоходная колесная машина, оснащенная установленным спереди рабочим оборудованием (3.9) со сменным бульдозерным или погрузочным оборудованием (3.10), имеющая колеса с устройствами для разрушения и уплотнения материала, предназначенная для уплотнения, смещения, профилирования и загрузки грунта и мусора при движении машины.
4.10 каток (roller): Самоходная или прицепная машина с уплотняющим устройством, состоящим из одного или более металлических цилиндрических вальцов (барабанов) или резиновых шин, предназначенная для уплотнения материалов, например щебня, грунта, асфальта или гравия, путем укатывания и (или) вибрационного воздействия уплотняющего устройства.
4.10.1 прицепной каток (towed roller): Несамоходный каток (4.10), приводимый в движение буксирующей машиной, на которой расположено рабочее место оператора.
4.11 трубоукладчик (pipelayer): Самоходная колесная или гусеничная машина, имеющая укладочное оборудование с главной рамой, механизм подъема груза, боковую стрелу, поворачивающуюся в вертикальной плоскости, и противовес, и предназначенная главным образом для подъема и укладки труб.
4.11.1 трубоукладчик с боковой стрелой (side-boom pipelayer): Трубоукладчик (4.11) с боковой стрелой, поворачивающейся в вертикальной плоскости, установленной с одной стороны машины таким образом, что она может перемещаться только вертикально.
4.11.2 трубоукладчик с поворотной платформой (rotating pipelayer): Трубоукладчик (4.11) с поворачивающейся в вертикальной плоскости стрелой, которая установлена на поворотной платформе, что позволяет ей перемещаться при повороте платформы.
4.12 машина горизонтального бурения (horizontal directional drill): Машина, в которой используется управляемая буровая головка, закрепленная на конце буровой штанги, предназначенная для бурения скважины в грунте в горизонтальном направлении.
Примечание 1 - Бурение может обеспечиваться путем подачи под давлением жидкости через буровую штангу к буровой головке, направление бурения контролируется посредством использования датчиков или преобразователей, установленных рядом с буровой головкой, с последующим расширением скважины при втягивании буровой штанги.
Примечание 2 - Как правило, в этих машинах, усилие на буровой штанге обеспечивается при установке рамы машины для горизонтального бурения параллельно рабочей поверхности грунта или под углом 30° к ней.
4.13 малогабаритное самоходное шасси (compact tool carrier): Самоходная колесная или гусеничная машина, имеющая эксплуатационную массу (3.7) не более 1500 кг, с жесткой рамой, управляемая либо рядом идущим оператором, либо оператором, стоящим на платформе, размещенной в задней части машины, оснащенная либо установленным спереди сменным рабочим оборудованием (3.9), либо подъемной стрелой, оборудованной приспособлениями, позволяющими осуществлять смену рабочего оборудования, и установленным спереди сменным оборудованием (3.10).
Приложение А
(справочное)
Процедура идентификации
В настоящем приложении приведена информация о структуре идентификации, применяемой в настоящем стандарте, а также процедура использования данной структуры для классификации машин и введения детальной идентификации машин в соответствии с логикой построения этой структуры.
Идентификация машин осуществляется в соответствии с:
a) семейством машины (см. раздел 4),
b) эксплуатационной массой машины (3.7), и
c) конфигурацией органов управления машиной (см. приложение В).
Структура семейства машин основана на схеме, приведенной на рисунке А.1.
Эксплуатационная масса машин применяется для определения предельных допустимых масс для некоторых конфигураций машин (например, малогабаритные машины).
Конфигурация органов управления связана со способом управления машиной, а также положением оператора и размещением поста оператора (см. приложение В).
В целом землеройные машины могут быть идентифицированы посредством объединения технических требований по каждой из характеристик, приведенных выше. Это позволяет однозначно идентифицировать машины, не определенные явно в настоящем стандарте, при условии, что они относятся к одному из имеющихся семейств машин.
Пример 1 - Мини-землевоз с жесткой рамой, управляемый оператором в положении сидя.
Для обеспечения дополнительного уточнения могут быть добавлены дополнительные характеристики.
Пример 2 - Гусеничный мини-землевоз с жесткой рамой, управляемый оператором в положении сидя.
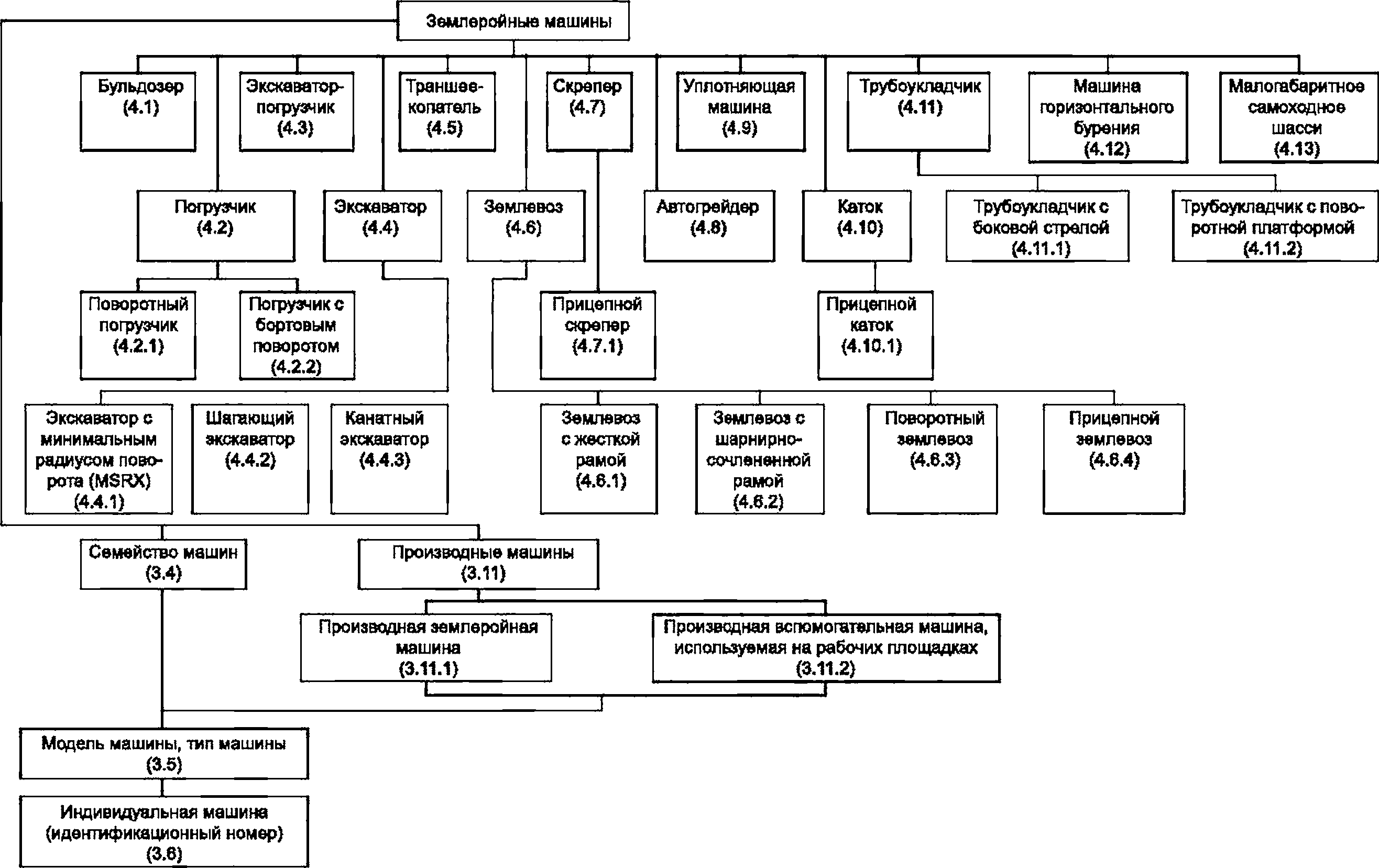 |
Рисунок А.1 - Схема идентификации машин
Приложение В
(справочное)
Конфигурация органов управления землеройных машин
Конфигурация органов управления землеройных машин может быть представлена в виде иерархической структуры в соответствии с типом управления, классификацией управления и положением оператора, как показано на рисунке В.1.
Примечание 1 - Структура, показанная на рисунке В.1, не исключает возможности введения новых конфигураций в соответствии с уровнем развития техники.
Примечание 2 - Машины с автоматическим или полуавтоматическим типом управления будут рассматриваться при следующем пересмотре стандарта.
 |
Рисунок В.1 - Конфигурация органов управления землеройных машин
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 10261:2002 | IDT | ГОСТ ISO 10261-2023 "Машины землеройные. Система обозначения идентификационного номера изделия" (ISO 10261:2021) |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичный стандарт. | ||
Библиография
Ссылочные терминологические стандарты: | |
[1] ISO 6747 | Earth-moving machinery - Tractor-dozers - Terminology and commercial specifications (Машины землеройные. Бульдозеры. Терминология и технические характеристики для коммерческой документации) |
[2] ISO 7131 | Earth-moving machinery - Loaders - Terminology and commercial specifications (Машины землеройные. Погрузчики. Терминология и технические характеристики для коммерческой документации) |
[3] ISO 7132 | Earth-moving machinery - Dumpers - Terminology and commercial specifications (Машины землеройные. Землевозы. Терминология и технические характеристики для коммерческой документации) |
[4] ISO 7133 | Earth-moving machinery - Tractor-scrapers - Terminology and commercial specifications (Машины землеройные. Скреперы. Терминология и технические характеристики для коммерческой документации) |
[5] ISO 7134 | Earth-moving machinery - Graders - Terminology and commercial specifications (Машины землеройные. Автогрейдеры. Терминология и технические характеристики для коммерческой документации) |
[6] ISO 7135 | Earth-moving machinery - Hydraulic excavators - Terminology and commercial specifications (Машины землеройные. Гидравлические экскаваторы. Терминология и технические характеристики для коммерческой документации) |
[7] ISO 7136 | Earth-moving machinery - Pipelayers - Definitions and commercial specifications (Машины землеройные. Трубоукладчики. Терминология и технические характеристики для коммерческой документации) |
[8] ISO 8811 | Earth-moving machinery - Rollers and compactors - Terminology and commercial specifications (Машины землеройные. Катки и уплотняющие машины. Терминология и технические характеристики для коммерческой документации) |
[9] ISO 8812 | Earth-moving machinery - Backhoe loaders - Definitions and commercial specifications (Машины землеройные. Экскаваторы-погрузчики. Определения и технические характеристики для коммерческой документации) |
[10] ISO 13539 | Earth-moving machinery - Trenchers - Definitions and commercial specifications (Машины землеройные. Траншеекопатели. Определения и технические характеристики для коммерческой документации) |
[11] ISO 15219 | Earth-moving machinery - Cable excavators - Terminology and commercial specifications (Машины землеройные. Экскаваторы канатные. Терминология и технические характеристики для коммерческой документации) |
[12] ISO 21467 | Earth-moving machinery - Horizontal directional drills - Terminology and specifications (Машины землеройные. Машины горизонтального бурения. Терминология и технические характеристики) |
Взаимосвязанные стандарты: | |
[13] ISO 6016 | Earth-moving machinery - Methods of measuring the masses of whole machines, their equipment and components (Машины землеройные. Методы измерений масс машин в целом, рабочего оборудования и составных частей) |
[14] ISO 6746-2 | Earth-moving machinery - Definitions of dimensions and codes - Part 2: Equipment and attachments (Машины землеройные. Определение размеров и условные обозначения размерных характеристик. Часть 2. Оборудование и приспособления) |
УДК 621.878/.879:001.4(083.74)(476) | МКС 01.040.53; 53.100 | IDT |
Ключевые слова: машины землеройные, классификация, термины, определения, идентификация | ||
{kind=link}