ГОСТ 24642-81
Группа Г00
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Основные нормы взаимозаменяемости
ДОПУСКИ ФОРМЫ И РАСПОЛОЖЕНИЯ ПОВЕРХНОСТЕЙ
Основные термины и определения
Basic norms of interchangeability. Tolerances of form and position.
Basic terms and definitions
Дата введения 1981-07-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством станкостроительной и инструментальной промышленности СССР
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 18.03.81 N 1423
3. Стандарт полностью соответствует СТ СЭВ 301-88
4. Стандарт соответствует в части терминологии международным стандартам ИСО 1101-83, ИСО 5459-81
5. ВЗАМЕН ГОСТ 10356-63 (в части разд.I и II)
6. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, на который дана ссылка | Номер пункта |
ГОСТ 25142-82 | 1.5-1.7 |
ГОСТ 25346-89 | Приложение 1, 1.33 |
7. ИЗДАНИЕ с Изменением N 1, утвержденным в октябре 1989 г. (ИУС 1-90)
Настоящий стандарт устанавливает термины и определения, относящиеся к основным видам отклонений и допусков формы и расположения поверхностей деталей машин и приборов.
Стандарт содержит приложения 1-6, в которых приведены дополнительные пояснения отдельных терминов, отмеченных *, указатели терминов на английском, немецком и французском языках, дополнительные параметры отклонений формы, а также алфавитные указатели терминов на русском языке и обозначений.
Термин | Определение | Чертеж |
| ||
1.1. Элемент* | Обобщенный термин, под которым в зависимости от соответствующих условий может пониматься поверхность, линия, точка | |
1.2. Профиль | Линия пересечения поверхности с плоскостью или заданной поверхностью. Примечание. Если в технической документации не указано иное, то направление секущей плоскости определяется по нормали к поверхности | |
1.3. Номинальная форма | Идеальная форма элемента, которая задана чертежом или другими техническими документами | |
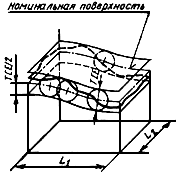
1.4. Номинальная поверхность | Идеальная поверхность, размеры и форма которой соответствуют заданным номинальным размерам и номинальной форме | |
1.5. Номинальный профиль | По ГОСТ 25142 | |
1.6. Реальная поверхность | По ГОСТ 25142 | |
1.7. Реальный профиль | По ГОСТ 25142 Примечание к пп.1.6 и 1.7. Реальная поверхность и реальный профиль в определениях отклонений формы и расположения по настоящему стандарту понимаются без учета шероховатости поверхности | |
1.8. Нормируемый участок* | Участок поверхности или линии, к которому относятся допуск формы, допуск расположения, суммарный допуск формы и расположения или соответствующие отклонения. Примечание. Если нормируемый участок не задан, то допуск формы, допуск расположения, суммарный допуск формы и расположения или соответствующие отклонения должны относиться ко всей рассматриваемой поверхности или длине рассматриваемого элемента | |
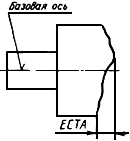
1.9. Базовый элемент для оценки отклонений формы* | Элемент номинальной формы, служащий основой для оценки отклонений формы реальной поверхности или реального профиля. Примечание. Базовый элемент для оценки отклонений формы используется также для исключения влияния отклонений формы при определении отклонений расположения | |
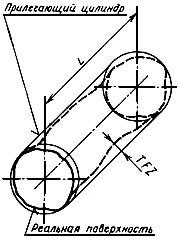
1.10. Прилегающая поверхность | Поверхность, имеющая форму номинальной поверхности, соприкасающаяся с реальной поверхностью и расположенная вне материала детали так, чтобы отклонение от нее наиболее удаленной точки реальной поверхности в пределах нормируемого участка имело минимальное значение. Примечание. Условие минимального значения отклонения не распространяется на прилегающий цилиндр (см. п.1.12) | |
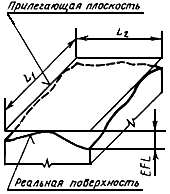
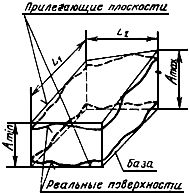
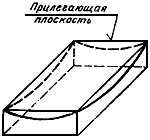
1.11. Прилегающая плоскость | Плоскость, соприкасающаяся с реальной поверхностью и расположенная вне материала детали так, чтобы отклонение от нее наиболее удаленной точки реальной поверхности в пределах нормируемого участка имело минимальное значение | |
1.12. Прилегающий цилиндр | Цилиндр минимального диаметра, описанный вокруг реальной наружной поверхности, или цилиндр максимального диаметра, вписанный в реальную внутреннюю поверхность. Примечание. В тех случаях, когда расположение прилегающего цилиндра относительно реальной поверхности неоднозначно, он принимается по условию минимального значения отклонения | |
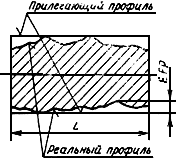
1.13. Прилегающий профиль | Профиль, имеющий форму номинального профиля, соприкасающийся с реальным профилем и расположенный вне материала детали так, чтобы отклонение от него наиболее удаленной точки реального профиля в пределах нормируемого участка имело минимальное значение. Примечание. Условие минимального значения отклонения не распространяется на прилегающую окружность (см. п.1.15) | |
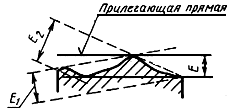
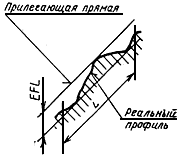
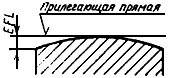
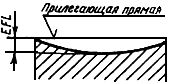
1.14. Прилегающая прямая | Прямая, соприкасающаяся с реальным профилем и расположенная вне материала детали так, чтобы отклонение от нее наиболее удаленной точки реального профиля в пределах нормируемого участка имело минимальное значение |
|
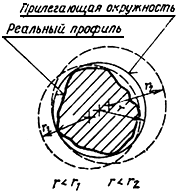
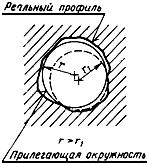
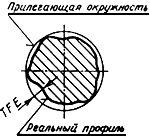
1.15. Прилегающая окружность | Окружность минимального диаметра, описанная вокруг реального профиля наружной поверхности вращения, или окружность максимального диаметра, вписанная в реальный профиль внутренней поверхности вращения. Примечание. В тех случаях, когда расположение прилегающей окружности относительно реального профиля неоднозначно, оно принимается по условию минимального значения отклонения |
|
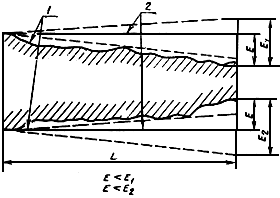
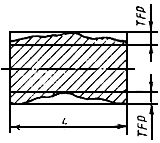
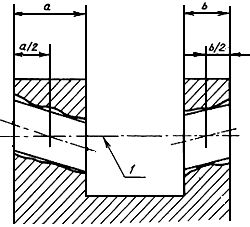
1.16. Прилегающий профиль продольного сечения | Две параллельные прямые, соприкасающиеся с реальным профилем осевого (продольного) сечения цилиндрической поверхности и расположенные вне материала детали так, чтобы наибольшее отклонение точек реального профиля от соответствующей стороны прилегающего профиля продольного сечения в пределах нормируемого участка имело минимальное значение |
|
1.17. Реальная ось | Геометрическое место центров сечений поверхности вращения, перпендикулярных оси прилегающей поверхности. Примечание. За центр сечения принимается центр прилегающей окружности. Ось прилегающей поверхности вращения | |
1.18. Геометричес- кая ось реальной поверхности вращения* | - | |
1.19. Отклонение формы* | Отклонение формы реального элемента от номинальной формы, оцениваемое наибольшим расстоянием от точек реального элемента по нормали к прилегающему элементу. Примечания: 1. Шероховатость поверхности не включается в отклонение формы. В обоснованных случаях допускается нормировать отклонение формы, включая шероховатость поверхности. 2. Волнистость включается в отклонение формы. В обоснованных случаях допускается нормировать отдельно волнистость поверхности или часть отклонения формы без учета волнистости. 3. Особым случаем оценки отклонения формы является отклонение от прямолинейности оси (см. пп.2.1.4. и 2.1.5). | |
1.20. Допуск формы | Наибольшее допускаемое значение отклонения формы | |
1.21. Поле допуска формы | Область в пространстве или на плоскости, внутри которой должны находиться все точки реального рассматриваемого элемента в пределах нормируемого участка, ширина или диаметр которой определяется значением допуска, а расположение относительно реального элемента - прилегающим элементом | |
1.22. База | Элемент детали (или выполняющее ту же функцию сочетание элементов), по отношению к которому задается допуск расположения или суммарный допуск формы и расположения рассматриваемого элемента, а также определяется соответствующее отклонение | |
1.23. Комплект баз | Совокупность двух или трех баз, образующих систему координат, по отношению к которой задается допуск расположения или суммарный допуск формы и расположения рассматриваемого элемента, а также определяется соответствующее отклонение | |
1.24. Участок базирования* | Точка, линия или ограниченная площадь на базовой поверхности детали, в которых должен быть обеспечен контакт детали с базирующими элементами обрабатывающего или контрольного оборудования с целью установления баз, необходимых для удовлетворения функциональных требований | |
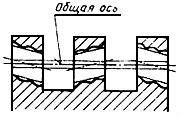
1.25. Общая ось* | Прямая, относительно которой наибольшее отклонение осей нескольких рассматриваемых поверхностей вращения в пределах длины этих поверхностей имеет минимальное значение |
|
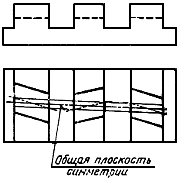
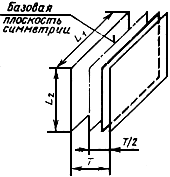
1.26. Общая плоскость симметрии | Плоскость, относительно которой наибольшее отклонение плоскостей симметрии нескольких рассматриваемых элементов в пределах длины этих элементов имеет минимальное значение |
|
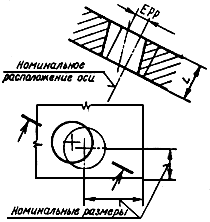
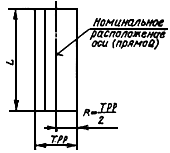
1.27. Номинальное расположение* | Расположение рассматриваемого элемента (поверхности или профиля), определяемое номинальными линейными и угловыми размерами между ним и базами или между рассматриваемыми элементами, если базы не заданы | |
1.28. Реальное расположение | Расположение рассматриваемого элемента (поверхности или профиля), определяемое действительными линейными и угловыми размерами между ним и базами или между рассматриваемыми элементами, если базы не заданы | |
1.29. Отклонение расположения* | Отклонение реального расположения рассматриваемого элемента от его номинального расположения. Примечания: 1. Количественно отклонения расположения оцениваются в соответствии с определениями, приведенными в пп.3.1-3.7. 2. При оценке отклонений расположения отклонения формы рассматриваемых элементов и баз должны исключаться из рассмотрения. При этом реальные поверхности (профили) заменяются прилегающими, а за оси плоскости симметрии и центры реальных поверхностей или профилей принимаются оси, плоскости симметрии и центры прилегающих элементов | |
1.30. Допуск расположения* | Предел, ограничивающий допускаемое значение отклонения расположения | |
1.31. Поле допуска расположения | Область в пространстве или заданной плоскости, внутри которой должен находиться прилегающий элемент или ось, центр, плоскость симметрии в пределах нормируемого участка, ширина или диаметр которой определяется значением допуска, а расположение относительно баз - номинальным расположением рассматриваемого элемента | |
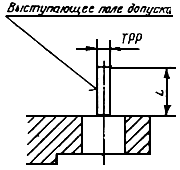
1.32. Выступающее поле допуска расположения | Поле допуска или часть его, ограничивающее отклонение расположения рассматриваемого элемента за пределами протяженности этого элемента (нормируемый участок выступает за пределы длины элемента) |
|
1.33. Зависимый допуск расположения | Допуск расположения или формы, указываемый на чертеже или в других технических документах в виде значения, которое допускается превышать на величину, зависящую от отклонения действительного размера рассматриваемого элемента и/или базы от предела максимума материала (наибольшего предельного размера вала или наименьшего предельного размера отверстия) | |
1.34. Независимый допуск расположения | Допуск расположения или формы, числовое значение которого постоянно для всей совокупности деталей и не зависит от действительного размера рассматриваемого элемента и/или базы | |
1.35. Суммарное отклонение формы и расположения* | Отклонение, являющееся результатом совместного проявления отклонения формы и отклонения расположения рассматриваемой поверхности или рассматриваемого профиля относительно баз. Примечание. Количественно суммарные отклонения формы и расположения оцениваются в соответствии с определениями, приведенными в пп.4.1-4.7, по точкам реального рассматриваемого элемента относительно прилегающих базовых элементов или их осей. | |
1.36. Суммарный допуск формы и расположения | Предел, ограничивающий допускаемое значение суммарного отклонения формы и расположения | |
1.37. Поле суммарного допуска формы и расположения | Область в пространстве или на заданной поверхности, внутри которой должны находиться все точки реальной поверхности (профиля) в пределах нормируемого участка, ширина которой определяется значением допуска, а расположение относительно баз - номинальным расположением рассматриваемого элемента | |
2. ОТКЛОНЕНИЯ И ДОПУСКИ ФОРМЫ | ||||||
2.1. Отклонение от прямолинейности и допуск прямолинейности | ||||||
2.1.1. Отклонение от прямолинейности в плоскости* | Наибольшее расстояние |
| ||||
2.1.2. Допуск прямолинейности | Наибольшее допускаемое значение отклонения от прямолинейности | |||||
2.1.3. Поле допуска прямолинейности в плоскости | Область на плоскости, ограниченная двумя параллельными прямыми, отстоящими друг от друга на расстоянии, равном допуску прямолинейности |
| ||||
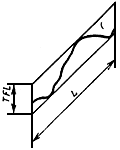
2.1.4. Отклонение от прямолинейности оси (или линии) в пространстве | Наименьшее значение диаметра |
| ||||
2.1.5. Отклонение от прямолинейности оси (или линии) в заданном направлении | Наименьшее расстояние |
| ||||
2.1.6. Поле допуска прямолинейности оси (или линии) в пространстве | 1) Область в пространстве, ограниченная цилиндром, диаметр которого равен допуску прямолинейности |
| ||||
2) Область в пространстве, ограниченная прямоугольным параллелепипедом, стороны сечения которого равны допускам прямолинейности оси (линии) в двух взаимно перпендикулярных направлениях |
| |||||
3) Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску прямолинейности оси (или линии) |
| |||||
2.2. Отклонение от плоскостности и допуск плоскостности | ||||||
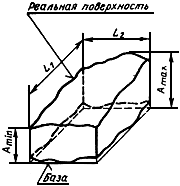
2.2.1. Отклонение от плоскостности* | Наибольшее расстояние |
| ||||
2.2.2. Допуск плоскостности | Наибольшее допускаемое значение отклонения от плоскостности | |||||
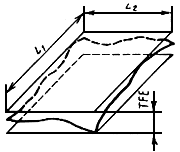
2.2.3. Поле допуска плоскостности | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску плоскостности |
| ||||
2.3. Отклонение от круглости и допуск круглости | ||||||
2.3.1. Отклонение от круглости* | Наибольшее расстояние |
| ||||
2.3.2. Допуск круглости | Наибольшее допускаемое значение отклонения от круглости | |||||
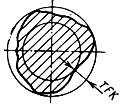
2.3.3. Поле допуска круглости | Область на поверхности, перпендикулярной оси поверхности вращения или проходящей через центр сферы, ограниченная двумя концентричными окружностями, отстоящими друг от друга на расстоянии, равном допуску круглости |
| ||||
2.4. Отклонение от цилиндричности и допуск цилиндричности | ||||||
2.4.1. Отклонение от цилиндричности | Наибольшее расстояние |
| ||||
2.4.2. Допуск цилиндричности | Наибольшее допускаемое значение отклонения от цилиндричности | |||||
2.4.3. Поле допуска цилиндричности | Область в пространстве, ограниченная двумя соосными цилиндрами, отстоящими друг от друга на расстоянии, равном допуску цилиндричности |
| ||||
2.5. Отклонение и допуск профиля продольного сечения цилиндрической поверхности | ||||||
2.5.1. Отклонение профиля продольного сечения* | Наибольшее расстояние |
| ||||
2.5.2. Допуск профиля продольного сечения | Наибольшее допускаемое значение отклонения профиля продольного сечения | |||||
2.5.3. Поле допуска профиля продольного сечения | Области на плоскости, проходящей через ось цилиндрической поверхности, ограниченные двумя парами параллельных прямых, имеющих общую ось симметрии и отстоящих друг от друга на расстоянии, равном допуску профиля продольного сечения |
| ||||
3. ОТКЛОНЕНИЯ И ДОПУСКИ РАСПОЛОЖЕНИЯ | ||||||
3.1. Отклонение от параллельности и допуск параллельности | ||||||
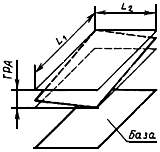
3.1.1. Отклонение от параллельности плоскостей | Разность |
| ||||
3.1.2. Допуск параллельности | Наибольшее допускаемое значение отклонения от параллельности | |||||
3.1.3. Поле допуска параллельности плоскостей | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску параллельности |
| ||||
3.1.4. Отклонение от параллельности оси (или прямой) и плоскости | Разность |
| ||||
3.1.5. Поле допуска параллельности оси (или прямой) в плоскости | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску параллельности |
| ||||
3.1.6. Отклонение от параллельности прямых в плоскости | Разность |
| ||||
3.1.7. Поле допуска параллельности прямых в плоскости | Область на плоскости, ограниченная двумя параллельными прямыми, отстоящими друг от друга на расстоянии, равном допуску параллельности |
| ||||
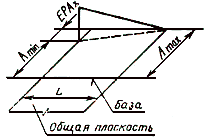
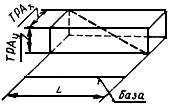
3.1.8. Отклонение от параллельности осей (или прямых) в пространстве* | Геометрическая сумма |
| ||||
3.1.8.1. Отклонение от параллельности осей (или прямых) в общей плоскости | Отклонение от параллельности |
| ||||
3.1.8.2. Перекос осей (или прямых) | Отклонение от параллельности |
| ||||
3.1.8.3. Допуск параллельности осей (прямых) в общей плоскости | - | |||||
3.1.8.4. Допуск перекоса осей (прямых) | - | |||||
3.1.9. Поле допуска параллельности осей (или прямых) в пространстве | 1) Область в пространстве, ограниченная прямоугольным параллелепипедом, стороны сечения которого равны соответственно допуску параллельности осей (прямых) в общей плоскости |
| ||||
2) Область в пространстве, ограниченная цилиндром, диаметр которого равен допуску параллельности |
| |||||
3.2. Отклонение от перпендикулярности и допуск перпендикулярности | ||||||
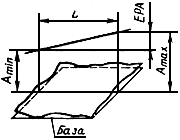
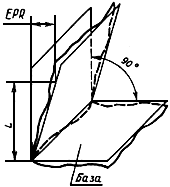
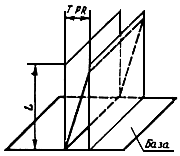
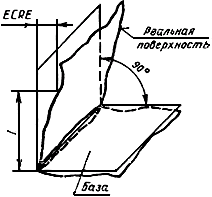
3.2.1. Отклонение от перпендикулярности плоскостей | Отклонение угла между плоскостями от прямого угла (90°), выраженное в линейных единицах |
| ||||
3.2.2. Допуск перпендикулярности* | Наибольшее допускаемое значение отклонения от перпендикулярности | |||||
3.2.3. Поле допуска перпендикулярности плоскостей | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску перпендикулярности |
| ||||
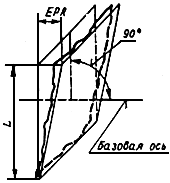
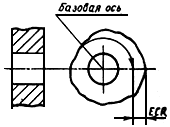
3.2.4. Отклонение от перпендикулярности плоскости или оси (или прямой) относительно оси (прямой) | Отклонение угла между плоскостью или осью (прямой) и базовой осью от прямого угла (90°), выраженное в линейных единицах |
| ||||
3.2.5. Поле допуска перпендикулярности плоскости или оси (или прямой) относительно оси (прямой) | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску перпендикулярности |
| ||||
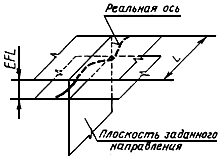
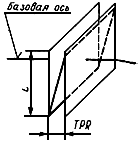
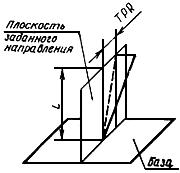
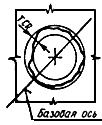
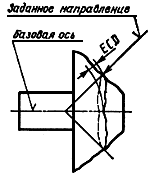
3.2.6. Отклонение от перпендикулярности оси (или прямой) относительно плоскости в заданном направлении | Отклонение угла между проекцией оси поверхности вращения (прямой) на плоскость заданного направления (перпендикулярную к базовой плоскости) и базовой плоскостью от прямого угла (90°), выраженное в линейных единицах |
| ||||
3.2.7. Поле допуска перпендикулярности оси (или прямой) относительно плоскости в заданном направлении | Область на плоскости заданного направления, ограниченная двумя параллельными прямыми, отстоящими друг от друга на расстоянии, равном допуску перпендикулярности |
| ||||
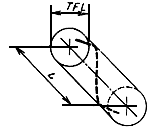
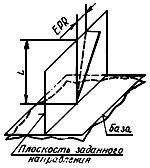
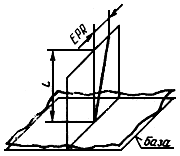
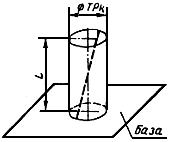
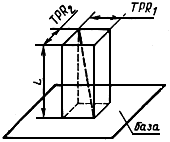
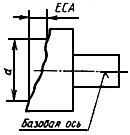
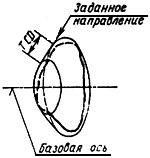
3.2.8. Отклонение от перпендикулярности оси (или прямой) относительно плоскости* | Отклонение угла между осью поверхности вращения (прямой) и базовой плоскостью от прямого угла (90°), выраженное в линейных единицах |
| ||||
3.2.9. Поле допуска перпендикулярности оси (или прямой) относительно плоскости | 1) Область в пространстве, ограниченная цилиндром, диаметр которого равен допуску перпендикулярности |
| ||||
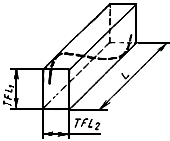
2) Область в пространстве, ограниченная прямоугольным параллелепипедом, стороны сечения которого равны допускам перпендикулярности оси (прямой) в двух заданных взаимно перпендикулярных направлениях |
| |||||
3.3. Отклонение и допуск наклона* | ||||||
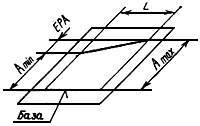
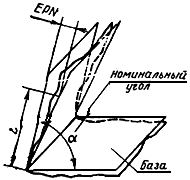
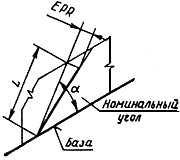
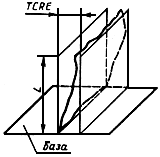
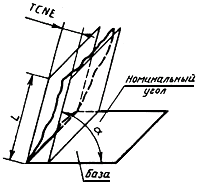
3.3.1. Отклонение наклона плоскости относительно плоскости или оси (или прямой) | Отклонение угла между плоскостью и базовой плоскостью или базовой осью (прямой) от номинального угла, выраженное в линейных единицах |
| ||||
3.3.2. Допуск наклона* | Наибольшее допускаемое значение отклонения наклона | |||||
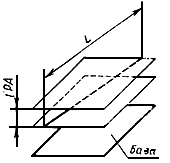
3.3.3. Поле допуска наклона плоскости относительно плоскости или оси (или прямой) | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску наклона |
| ||||
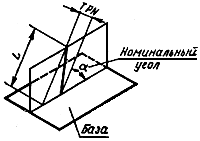
3.3.4. Отклонение наклона оси (или прямой) относительно оси (прямой) или плоскости* | Отклонение угла между осью поверхности вращения (прямой) и базовой осью или базовой плоскостью от номинального угла, выраженное в линейных единицах |
| ||||
3.3.5. Поле допуска наклона оси (или прямой) относительно оси (прямой) или плоскости | Область на плоскости, ограниченная двумя параллельными прямыми, отстоящими друг от друга на расстоянии, равном допуску наклона |
| ||||
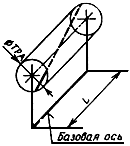
3.4. Отклонение от соосности и допуск соосности* | ||||||
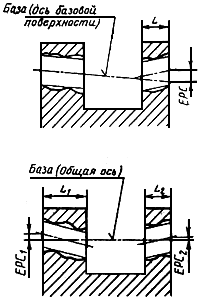
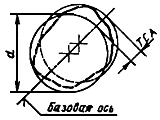
3.4.1. Отклонение от соосности | Наибольшее расстояние между осью рассматриваемой поверхности вращения и базой (осью базовой поверхности или общей осью двух или нескольких поверхностей) на длине нормируемого участка |
| ||||
3.4.2. (Исключен, Изм. N 1). | ||||||
3.4.3. Допуск соосности* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения от соосности. 2) Допуск в радиусном выражении - наибольшее допускаемое значение отклонения от соосности | |||||
3.4.4. Поле допуска соосности | Область в пространстве, ограниченная цилиндром, диаметр которого равен допуску соосности в диаметральном выражении |
| ||||
3.5. Отклонение от симметричности и допуск симметричности | ||||||
3.5.1. Отклонение от симметричности | Наибольшее расстояние между плоскостью симметрии (осью) рассматриваемого элемента (или элементов) и базой (плоскостью симметрии базового элемента или общей плоскостью симметрии двух или нескольких элементов) в пределах нормируемого участка |
| ||||
3.5.2. (Исключен, Изм. N 1) | ||||||
3.5.3. Допуск симметричности* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения от симметричности. 2) Допуск в радиусном выражении - наибольшее допускаемое значение отклонения от симметричности | |||||
3.5.4. Поле допуска симметричности | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску симметричности в диаметральном выражении |
| ||||
3.6. Позиционное отклонение и позиционный допуск | ||||||
3.6.1. Позиционное отклонение | Наибольшее расстояние |
| ||||
3.6.2. Позиционный допуск* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение позиционного отклонения элемента. 2) Допуск в радиусном выражении - наибольшее допускаемое значение позиционного отклонения элемента | |||||
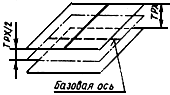
3.6.3. Поле позиционного допуска оси (или прямой) в плоскости | Область на плоскости, ограниченная двумя параллельными прямыми, отстоящими друг от друга на расстоянии, равном позиционному допуску в диаметральном выражении |
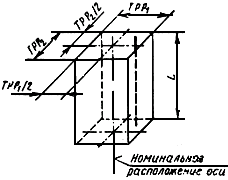
| ||||
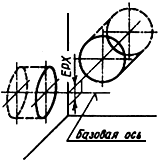
3.6.4. Поле позиционного допуска оси (или прямой) в пространстве | 1) Область в пространстве, ограниченная цилиндром, диаметр которого равен позиционному допуску в диаметральном выражении |
| ||||
2) Область в пространстве, ограниченная прямоугольным параллелепипедом, стороны сечения которого равны позиционным допускам |
| |||||
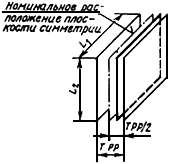
3.6.5. Поле позиционного допуска плоскости симметрии или оси в заданном направлении | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном позиционному допуску в диаметральном выражении |
| ||||
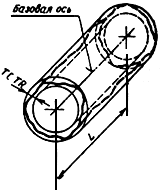
3.7. Отклонение от пересечения и допуск пересечения осей | ||||||
3.7.1. Отклонение от пересечения осей | Наименьшее расстояние |
| ||||
3.7.2. Допуск пересечения осей* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения от пересечения осей. 2) Допуск в радиусном выражении - наибольшее допускаемое значение отклонения от пересечения осей | |||||
3.7.3. Поле допуска пересечения осей | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску пересечения в диаметральном выражении |
| ||||
4. СУММАРНЫЕ ОТКЛОНЕНИЯ И ДОПУСКИ ФОРМЫ И РАСПОЛОЖЕНИЯ | ||||||
4.1. Радиальное биение и допуск радиального биения | ||||||
4.1.1. Радиальное биение* | Разность |
| ||||
4.1.2. Допуск радиального биения | Наибольшее допускаемое значение радиального биения | |||||
4.1.3. Поле допуска радиального биения | Область на плоскости, перпендикулярной к базовой оси, ограниченная двумя концентричными окружностями с центром, лежащим на базовой оси, и отстоящими друг от друга на расстоянии, равном допуску радиального биения |
| ||||
4.2. Торцовое биение и допуск торцового биения | ||||||
4.2.1. Торцовое биение* | Разность Примечание. Торцовое биение определяется в сечении торцовой поверхности цилиндром заданного диаметра, соосным с базовой осью, а если диаметр не задан, то в сечении любого (в том числе и наибольшего) диаметра торцовой поверхности |
| ||||
4.2.2. Допуск торцового биения | Наибольшее допускаемое значение торцового биения | |||||
4.2.3. Поле допуска торцового биения | Область на боковой поверхности цилиндра, диаметр которого равен заданному или любому (в том числе и наибольшему) диаметру торцовой поверхности, а ось совпадает с базовой осью, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску торцового биения |
| ||||
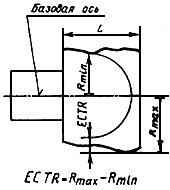
4.3. Биение и допуск биения в заданном направлении | ||||||
4.3.1. Биение в заданном направлении* | Разность |
| ||||
4.3.2. Допуск биения в заданном направлении | Наибольшее допускаемое значение биения в заданном направлении | |||||
4.3.3. Поле допуска биения в заданном направлении | Область на боковой поверхности конуса, ось которого совпадает с базовой осью, а образующая имеет заданное направление, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии вдоль образующей конуса, равном допуску биения |
| ||||
4.4. Полное радиальное биение и допуск полного радиального биения* | ||||||
4.4.1. Полное радиальное биение* | Разность |
| ||||
4.4.2. Допуск полного радиального биения | Наибольшее допускаемое значение полного радиального биения | |||||
4.4.3. Поле допуска полного радиального биения | Область в пространстве, ограниченная двумя цилиндрами, ось которых совпадает с базовой осью, а боковые поверхности отстоят друг от друга на расстоянии, равном допуску полного радиального биения |
| ||||
4.5. Полное торцовое биение и допуск полного торцового биения* | ||||||
4.5.1. Полное торцовое биение* | Разность |
| ||||
4.5.2. Допуск полного торцового биения | Наибольшее допускаемое значение полного торцового биения | |||||
4.5.3. Поле допуска полного торцового биения | Область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном допуску полного торцового биения |
| ||||
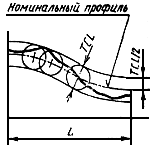
4.6. Отклонение и допуск формы заданного профиля* | ||||||
4.6.1. Отклонение формы заданного профиля* | Наибольшее отклонение |
| ||||
4.6.2. Допуск формы заданного профиля* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения формы заданного профиля. 2) Допуск в радиусном выражении - наибольшее допускаемое значение отклонения формы заданного профиля | |||||
4.6.3. Поле допуска формы заданного профиля | Область на заданной плоскости сечения поверхности, ограниченная двумя линиями, эквидистантными номинальному профилю, и отстоящими друг от друга на расстоянии, равном допуску формы заданного профиля в диаметральном выражении |
| ||||
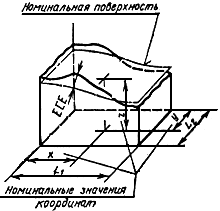
4.7. Отклонение и допуск формы заданной поверхности* | ||||||
4.7.1. Отклонение формы заданной поверхности* | Наибольшее отклонение |
| ||||
4.7.2. Допуск формы заданной поверхности* | 1) Допуск в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения формы заданной поверхности. 2) Допуск в радиусном выражении - наибольшее допускаемое значение отклонения формы заданной поверхности | |||||
4.7.3. Поле допуска формы заданной поверхности | Область в пространстве, ограниченная двумя поверхностями, эквидистантными номинальной поверхности, и отстоящими друг от друга на расстоянии равном допуску формы заданной поверхности в диаметральном выражении Поверхности, ограничивающие поле допуска, являются огибающими семейства сфер, диаметр которых равен допуску формы заданной поверхности в диаметральном выражении |
| ||||










(Измененная редакция, Изм. N 1).
ПРИЛОЖЕНИЕ 1
Справочное
ДОПОЛНИТЕЛЬНЫЕ ПОЯСНЕНИЯ К ТЕРМИНАМ И ОПРЕДЕЛЕНИЯМ
Номер термина | Пояснение |
1.1. Элемент | 1. Элемент может быть поверхностью (частью поверхности, плоскостью симметрии нескольких поверхностей), линией (профилем поверхности, линией пересечения двух поверхностей, осью поверхности или сечения), точкой (точкой пересечения поверхностей или линий, центром окружности или сферы). 2. В соответствии с терминологией, принятой в настоящем стандарте для поверхностей, профилей и линий, могут применяться обобщенные термины: номинальный элемент, реальный элемент, базовый элемент, прилегающий элемент, средний элемент и т.п. |
1.8. Нормируемый участок | 1. Нормируемый участок должен быть задан размерами, определяющими его площадь, длину или угол сектора, а в необходимых случаях и расположение участка на элементе. 2. Для криволинейных поверхностей или профилей нормируемый участок может задаваться размерами проекции поверхности или профиля. 3. Если расположение нормируемого участка не задано, то он может занимать любое расположение в пределах всего элемента |
1.9. Базовый элемент для оценки отклонений формы | В качестве базового элемента для оценки отклонений формы следует принимать прилегающую поверхность или прилегающий профиль. Другие базовые элементы для оценки отклонений формы указаны в пояснениях к п.1.19 |
1.18. Геометрическая ось реальной поверхности вращения | В качестве геометрической оси реальной поверхности вращения допускается принимать ось цилиндра наименьшего возможного диаметра, внутри которого располагается реальная ось в пределах нормируемого участка |
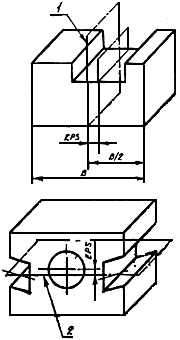
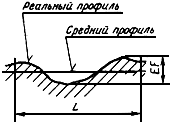
1.19. Отклонение формы | Вместо прилегающего элемента для оценки отклонений формы допускается использовать в качестве базового элемента средний элемент. Вместо прилегающего цилиндра и прилегающей окружности для оценки отклонений формы допускается также использовать цилиндр минимальной зоны и окружность минимальной зоны: 1) средний элемент - поверхность (профиль), имеющая номинальную форму и такие размеры и/или расположение, чтобы сумма квадратов расстояний между реальным и средним элементами в пределах нормируемого участка имела минимальное значение; 2) при отсчете от среднего элемента отклонение формы равно сумме абсолютных значений наибольших отклонений точек реальной поверхности (профиля) по обе стороны от среднего элемента (черт.1);
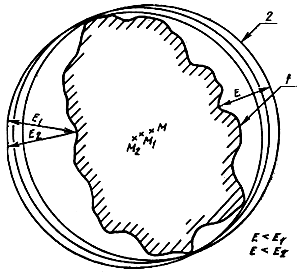
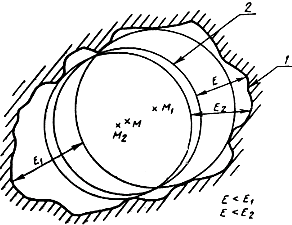
3) цилиндр минимальной зоны - цилиндр, соприкасающийся с реальной поверхностью и расположенный вне материала детали так, чтобы наибольшее расстояние 4) окружность минимальной зоны - окружность, соприкасающаяся с реальным профилем и расположенная вне материала детали так, чтобы наибольшее расстояние
Черт.2
|
1.22. База | Частными случаями базы являются, например, базовая плоскость, базовая ось, базовая плоскость симметрии. В качестве базовой оси в зависимости от требований может быть задана ось базовой поверхности вращения или общая ось двух или нескольких поверхностей вращения. В качестве базовой плоскости симметрии может быть задана плоскость симметрии базового элемента или общая плоскость симметрии двух или нескольких элементов |
1.23. Комплект баз | 1. Базы, образующие комплект баз, различают в порядке убывания числа степеней свободы, лишаемых ими (например, на черт.4 база А лишает деталь трех степеней свободы, база В - двух, а база С - одной степени свободы).
Черт.4 2. Если базы не заданы или задан комплект баз, лишающий деталь менее чем шести степеней свободы, то расположение системы координат, в которой задан допуск расположения или суммарный допуск формы и расположения рассматриваемого элемента относительно других элементов детали, ограничивается по оставшимся степеням свободы лишь условием соблюдения заданного допуска, а при измерении - условием получения минимального значения соответствующего отклонения |
1.24. Участок базирования | 1. Участки базирования должны быть заданы размерами, определяющими их протяженность и расположение на базе. 2. В случаях, когда участки базирования необходимо задать для комплекта баз из трех взаимно перпендикулярных плоскостей (см. черт.4), первая база (база А) должна задаваться тремя участками базирования, вторая база (база В) - двумя и третья база (база С) - одним участком базирования |
1.25. Общая ось | За общую ось двух поверхностей допускается принимать прямую, проходящую через оси рассматриваемых поверхностей в их средних сечениях (черт.5)
1 - общая ось |
1.27. Номинальное расположение | Номинальное расположение определяется непосредственно изображением детали на чертеже без числового значения номинального размера между элементами, когда: 1) номинальный линейный размер равен нулю (требования соосности, симметричности, совмещения элементов в одной плоскости); 2) номинальный угловой размер равен 0° или 180° (требование параллельности); 3) номинальный угловой размер равен 90° (требование перпендикулярности) |
1.29. Отклонение расположения | 1. Если задан комплект баз, то прилегающий элемент для базы, лишающей изделие наибольшего числа степеней свободы, должен соответствовать общим определениям этих элементов, указанным в разделе 1, а для других баз комплекта прилегающий элемент должен удовлетворять дополнительному требованию - иметь номинальное расположение по отношению к прилегающим элементам баз, лишающих изделие большего числа степеней свободы (черт.6).
Черт.6 2. Если для исключения влияния отклонений формы реальных рассматриваемых и базовых элементов при оценке отклонений расположения взамен прилегающих элементов используются средние элементы, а также цилиндр и окружность минимальной зоны (см. пояснение к п.1.19), то следует учитывать, что могут возникнуть расхождения между значениями отклонений расположения, измеренными по этим элементам и по прилегающим элементам. Величина этих расхождений зависит от характера и величины отклонений формы реальных элементов. 3. Отклонения расположения дополнительно могут подразделяться на отклонения месторасположения и отклонения ориентации. Отклонение месторасположения - отклонение от номинального расположения, определяемого номинальными линейными или линейными и угловыми размерами (отклонения от соосности, симметричности, пересечения осей, позиционные отклонения). Отклонение ориентации - отклонение от номинального расположения, определяемого номинальным угловым размером (отклонения от параллельности и перпендикулярности, отклонение наклона) |
1.30. Допуск расположения | В соответствии с подразделением отклонений расположения согласно пояснению 3 к п.1.29 допуски расположения также могут дополнительно подразделяться на допуски месторасположения и допуски ориентации |
1.33. Зависимый допуск расположения; | 1. Понятие о зависимых допусках расположения или формы может быть применимо только к элементам (рассматриваемым или базовым), представляющим собой валы или отверстия в соответствии с определениями по ГОСТ 25346. 2. Числовое значение зависимого допуска расположения может быть связано либо с действительными размерами рассматриваемого элемента и базы, либо только с действительным размером рассматриваемого элемента, либо только с действительным размером базы. 3. Под действительным размером элемента понимается: при зависимых допусках расположения - размер прилегающего элемента (размер по сопряжению), при зависимых допусках формы - размер, определенный двухточечным измерением. 4. В частном случае числовое значение зависимого допуска расположения или формы может быть равно нулю. Это означает, что отклонение расположения или формы допускается только для деталей, у которых имеются соответствующие отклонения действительного размера рассматриваемого или базового элемента от предела максимума материала |
1.35. Суммарное отклонение формы и расположения | Если для исключения влияния отклонений формы реальных базовых элементов взамен прилегающих элементов используются средние элементы, цилиндр и окружность минимальной зоны, соответственно их оси или плоскости симметрии, то следует учитывать пояснения к п.1.29 |
2.1.1. Отклонение от прямолинейности в плоскости | Частными видами отклонения от прямолинейности являются выпуклость и вогнутость. |
Выпуклость - отклонение от прямолинейности, при котором удаление точек реального профиля от прилегающей прямой уменьшается от краев к середине (черт.7).
Черт.7 Вогнутость - отклонение от прямолинейности, при котором удаление точек реального профиля от прилегающей прямой увеличивается от краев к середине (черт.8).
Черт.8 | |
отклонение от плоскостности | Частными видами отклонений от плоскостности являются выпуклость и вогнутость. Выпуклость - отклонение от плоскостности, при котором удаление точек реальной поверхности от прилегающей плоскости уменьшается от краев к середине (черт.9).
Черт.9 Вогнутость - отклонение от плоскостности, при котором удаление точек реальной поверхности от прилегающей плоскости увеличивается от краев к середине (черт.10).
Черт.10 |
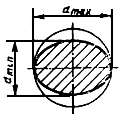
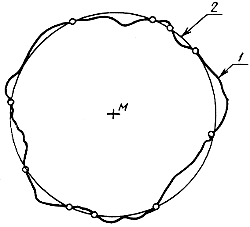
2.3.1. Отклонение от круглости | Частными видами отклонений от круглости являются овальность и огранка. Овальность - отклонение от круглости, при котором реальный профиль представляет собой овалообразную фигуру, наибольший и наименьший диаметры которой находятся во взаимноперпендикулярных направлениях (черт.11).
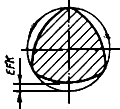
Огранка - отклонение от круглости, при котором реальный профиль представляет собой многогранную фигуру. Огранка подразделяется по числу граней. В частности, огранка с нечетным числом граней характеризуется тем, что диаметры профиля поперечного сечения во всех направлениях одинаковые (черт.12).
Количественно овальность и огранка оцениваются так же, как и отклонение от круглости |
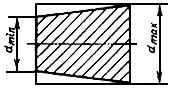
2.5.1. Отклонение профиля продольного сечения | 1. Отклонение профиля продольного сечения характеризует отклонения от прямолинейности и параллельности образующих. Частными видами отклонения профиля продольного сечения являются конусообразность, бочкообразность и седлообразность: 1) конусообразность - отклонение профиля продольного сечения, при котором образующие прямолинейны, но не параллельны (черт.13);
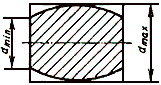
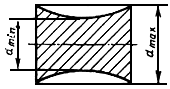
Черт.13 2) бочкообразность - отклонение профиля продольного сечения, при котором образующие непрямолинейны и диаметры увеличиваются от краев к середине сечения (черт.14);
3) седлообразность - отклонение профиля продольного сечения, при котором образующие непрямолинейны и диаметры уменьшаются от краев к середине сечения (черт.15).
Черт.15 2. Количественно конусообразность, бочкообразность и седлообразность оцениваются так же, как и отклонение профиля продольного сечения. 3. Для нормирования отклонения формы цилиндрической поверхности в осевом направлении могут применяться допуск прямолинейности образующей, допуск прямолинейности оси и допуск параллельности образующих, согласно пп.2.1.3, 2.1.6 и 3.1.6 |
3.1.8. Отклонения от параллельных осей (прямых) в пространстве | Общая плоскость осей (прямых) в пространстве - плоскость, проходящая через одну (базовую) ось и точку другой оси |
3.2.2. Допуск перпендикулярности | Для нормирования перпендикулярности, кроме допусков по настоящему стандарту СЭВ, могут быть применены способы, основанные на указании предельных отклонений от прямого угла в угловых единицах. Допуску перпендикулярности
где |
3.2.8. Отклонения от перпендикулярности оси (прямой) относительно плоскости | Отклонения от перпендикулярности оси (прямой) относительно плоскости определяются в плоскости, перпендикулярной к базовой плоскости и проходящей через рассматриваемую ось (прямую) |
3.3. Отклонение и допуск наклона | Термины по п.3.3 применяются при любых номинальных значениях угла наклона, кроме 0°, 90°, 180° |
3.3.2. Допуск наклона | Для нормирования углов между элементами, кроме допусков наклона по настоящему стандарту, могут быть применены способы, основанные на указании предельных отклонений от номинального угла в угловых единицах Допуску наклона
где |
3.3.4. Отклонение наклона оси (прямой) относительно оси на плоскости | Отклонение наклона оси (прямой) относительно оси или плоскости определяется в плоскости, проходящей: 1) через базовую и рассматриваемую оси; 2) через базовую ось параллельно рассматриваемой оси (если оси не лежат в одной плоскости); 3) через рассматриваемую ось перпендикулярно к базовой плоскости. |
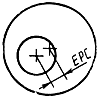
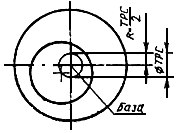
3.4. Отклонение от соосности и допуск соосности | Кроме терминов по п.3.4, в отдельных случаях могут применяться понятия об отклонениях от концентричности и допуске концентричности 1) отклонение от концентричности
Черт.16 2) допуск концентричности ТРС: в диаметральном выражении - удвоенное наибольшее допускаемое значение отклонения от концентричности; в радиусном выражении - наибольшее допускаемое значение отклонения от концентричности; 3) поле допуска концентричности - область на заданной плоскости, ограниченная окружностью, диаметр которой равен допуску концентричности в диаметральном выражении или удвоенному допуску концентричности в радиусном выражении, а центр совпадает с базовым центром (лежит на базовой оси, черт.17).
|
3.4.3. Допуск соосности | Допуск соосности рекомендуется указывать в диаметральном выражении |
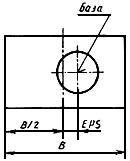
3.5.1. Отклонение от симметричности | Отклонение от симметричности относительно базовой оси определяется в плоскости, проходящей через базовую ось перпендикулярно к плоскости симметрии (черт.18).
|
3.5.3. Допуск симметричности | Допуск симметричности рекомендуется указывать в диаметральном выражении |
3.6.2. Позиционный допуск | 1. Позиционный допуск рекомендуется указывать в диаметральном выражении. 2. Для нормирования расположения элементов, их осей и плоскостей симметрии, кроме позиционных допусков по настоящему стандарту, могут быть применены способы, основанные на указании предельных отклонений размеров, координирующих элементы |
4. Суммарные отклонения и допуски формы и расположения | Кроме тех видов суммарных отклонений и допусков, которые приведены в пп.4.1-4.7, в обоснованных случаях могут нормироваться и другие суммарные отклонения формы и расположения поверхностей или профилей. Ниже приводятся термины и определения для отдельных примеров таких суммарных отклонений и допусков. 1. Суммарное отклонение и суммарный допуск параллельности и плоскостности: 1) суммарное отклонение от параллельности и плоскостности
2) суммарный допуск параллельности и плоскостности 3) поле суммарного допуска параллельности и плоскостности - область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном суммарному допуску параллельности и плоскостности, и параллельными базовой плоскости (черт.20);
Черт.20 2. Суммарное отклонение и суммарный допуск перпендикулярности и плоскостности: 1) суммарное отклонение от перпендикулярности и плоскостности
2) суммарный допуск перпендикулярности и плоскостности 3) поле суммарного допуска перпендикулярности и плоскостности - область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном суммарному допуску перпендикулярности и плоскостности, и перпендикулярными к базовой плоскости или базовой оси (черт.22).
Черт.22 3. Суммарное отклонение и суммарный допуск наклона и плоскостности: 1) суммарное отклонение от наклона и плоскостности
Черт.23 2) суммарный допуск наклона и плоскости 3) поле суммарного допуска наклона и плоскостности - область в пространстве, ограниченная двумя параллельными плоскостями, отстоящими друг от друга на расстоянии, равном суммарному допуску наклона и плоскостности, и расположенными под заданным номинальным углом относительно базовой плоскости или базовой оси (черт.24).
|
4.1.1. Радиальное биение | Радиальное биение является результатом совместного проявления отклонения от круглости профиля рассматриваемого сечения и отклонения его центра относительно базы. Оно не включает в себя отклонений формы и расположения образующей поверхности вращения |
4.2.1. Торцовое биение | При номинальной плоской форме торца торцовое биение является результатом совместного проявления отклонения от общей плоскости точек, лежащих на линии пересечения торцовой поверхности с секущим цилиндром, и отклонения от перпендикулярности торца относительно базы на длине, равной диаметру рассматриваемого сечения. Торцовое биение не включает в себя всего отклонения от плоскостности рассматриваемой поверхности |
4.3.1. Биение в заданном направлении | Направление рекомендуется задавать по нормали к рассматриваемой поверхности Биение является результатом совместного проявления в заданном направлении отклонений формы профиля рассматриваемого сечения и отклонений расположения оси рассматриваемой поверхности относительно базы |
4.4. Полное радиальное биение и допуск полного радиального биения | Термины по п.4.4 применяются только к поверхностям с номинальной цилиндрической формой |
4.4.1. Полное радиальное биение | Полное радиальное биение является результатом совместного проявления отклонения от цилиндричности рассматриваемой поверхности и отклонения от ее соосности относительно базы |
4.5. Полное торцовое биение и допуск полного торцового биения | Термины по п.4.5 применяются только к торцовым поверхностям с номинальной плоской формой |
4.5.1. Полное торцовое биение | Полное торцовое биение является результатом совместного проявления отклонения от плоскостности рассматриваемой поверхности и отклонения от ее перпендикулярности относительно базы |
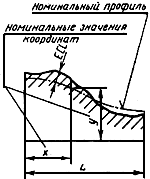
4.6 и 4.7. Отклонение и допуск формы заданного профиля (поверхности) | Термины по пп.4.6 и 4.7 применяются в тех случаях, когда профиль (поверхность) задан номинальными размерами - координатами отдельных точек профиля (поверхности) или размерами его элементов без предельных отклонений этих размеров (размерами в рамках) |
4.6.1 и 4.7.1. Отклонение формы заданного профиля (поверхности) | 1. В тех случаях, когда базы не заданы, расположение номинального профиля (поверхности) относительно реального определяется условием получения минимального отклонения формы профиля (поверхности) (черт.25).
Черт.25 2. Отклонение формы заданного профиля (поверхности) является результатом совместного проявления отклонений размеров и формы профиля (поверхности), а также отклонений расположения его относительно заданных баз |
4.6.2 и 4.7.2. Допуск формы заданного профиля (поверхности) | 1. Допуск формы заданного профиля (поверхности) рекомендуется указывать в диаметральном выражении. 2. Кроме допуска формы заданного профиля (поверхности) по настоящему стандарту для нормирования размеров и формы профиля (поверхности) могут быть применены способы, основанные на указании предельных отклонений координат отдельных точек профиля (поверхности) или на раздельном указании предельных отклонений размеров и допусков формы отдельных элементов профиля (поверхности) |






Приложение 1. (Измененная редакция, Изм. N 1)
ПРИЛОЖЕНИЕ 2
Справочное
УКАЗАТЕЛЬ ТЕРМИНОВ
На английском языке
1.1. | Feature |
1.2. | Profile |
1.3. | Nominal form |
1.4. | Nominal surface |
1.5. | Nominal profile |
1.6. | Real surface |
1.7. | Real profile |
1.10. | Superimposed surface |
1.11. | Superimposed plane |
1.12. | Superimposed cylinder |
1.13. | Superimposed profile |
1.14. | Superimposed line |
1.15. | Superimposed circle |
1.16. | Superimposed profile of longitudinal section |
1.17. | Real axis |
1.18. | Geometrical axis of real revolving surface |
1.19. | Form deviation |
1.20. | Tolerance of form |
1.21. | Tolerance zone of form |
1.22. | Datum |
1.23. | Datum system |
1.24. | Datum target |
1.25. | Common axis |
1.26. | Common median plane |
1.27. | Nominal position |
1.28. | Real position |
1.29. | Deviation of position |
1.30. | Tolerance of position |
1.31. | Tolerance zone of position |
1.32. | Projected tolerance zone |
2.1.1. | Straightness deviation in a plane |
2.1.2. | Straightness tolerance |
2.1.3. | Tolerance zone of straightness in a plane |
2.1.6. | Tolerance zone of straightness of an axis |
2.2.1. | Flatness deviation |
2.2.2. | Flatness tolerance |
2.2.3. | Flatness tolerance zone |
2.3.1. | Circularity deviation |
2.3.2. | Circularity tolerance |
2.3.3. | Circularity tolerance zone |
2.4.1. | Cylindricity deviation |
2.4.2. | Cylindricity tolerance |
2.4.3. | Cylindricity tolerance zone |
3.1.1. | Parallelism deviation of a surface with reference to a datum surface |
3.1.2. | Parallelism tolerance |
3.1.3. | Tolerance zone of parallelism of a surface with reference to a datum surface |
3.1.4. | Parallelism deviation of a line with reference to a datum surface |
3.1.5. | Tolerance zone of parallelism of a line with reference to a datum surface |
3.1.6. | Parallelism deviation of a line with reference to a datum line in one plane |
3.1.7. | Tolerance zone of parallelism of a line with reference to a datum line in one plane |
3.1.9. | Tolerance zone of parallelism of a line with reference to a datum line |
3.2.1. | Perpendicularity deviation of a surface with reference to a datum surface |
3.2.2. | Perpendicularity tolerance |
3.2.3. | Tolerance zone of perpendicularity of a surface with reference to a datum surface |
3.2.4. | Perpendicularity deviation of a surface or line with reference to a datum line |
3.2.5. | Tolerance zone of perpendicularity of a surface or line with reference to a datum line |
3.2.7. | Tolerance zone of perpendicularity of a line with reference to a datum surface in the specified direction |
3.2.8. | Perpendicularity deviation of a line with reference to a datum surface |
3.2.9. | Tolerance zone of perpendicularity of a line with reference to a datum surface |
З.3.1. | Angularity deviation of a surface with a reference to a datum surface (or datum line) |
3.3.2. | Angularity tolerance |
3.3.3. | Tolerance zone of angularity of a surface with reference to a datum plane (or a datum line) |
3.3.4. | Angularity deviation of a line with a reference to a datum line (or a datum plane) |
3.3.5. | Tolerance zone of angularity of a line with reference to a datum line (or a datum plane) |
3.4.1. | Coaxiality deviation |
3.4.2. | Coaxiality tolerance |
3.4.3. | Coaxiality tolerance zone |
3.5.1. | Symmetry deviation |
3.5.2. | Symmetry tolerance |
3.5.3. | Symmetry tolerance zone |
3.6.1. | Positional deviation |
3.6.2. | Positional tolerance |
3.6.3. | Tolerance zone of position of a line in one plane |
3.6.4. | Tolerance zone of position of a line |
3.6.5. | Positional tolerance zone of median plane (line) in the specified direction |
4.1.1. | Radial run-out |
4.1.2. | Radial run-out tolerance |
4.1.3. | Tolerance zone of radial run-out |
4.2.1. | Axial run-out |
4.2.2. | Axial run-out tolerance |
4.2.3. | Tolerance zone of axial run-out |
4.3.1. | Circular run-out in a specified direction |
4.3.2. | Circular run-out tolerance in a specified direction |
4.3.3. | Tolerance zone of circular run-out in a specified direction |
4.4.1. | Total radial run-out |
4.4.2. | Total radial run-out tolerance |
4.4.3. | Tolerance zone of total radial run-out |
4.5.1. | Total axial run-out |
4.5.2 | Total axial run-out tolerance |
4.5.3. | Tolerance zone of total axial run-out |
4.6.1. | Profile deviation of any line |
4.6.2. | Profile tolerance of any line |
4.6.3. | Tolerance zone of a profile of any line |
4.7.1. | Profile deviation of any surface |
4.7.2. | Profile tolerance of any surface |
4.7.3. | Tolerance zone of a profile of any surface |
УКАЗАТЕЛЬ ТЕРМИНОВ
На немецком языке
1.1. | Element |
1.2. | Profil |
1.3. | Nennform |
1.4. |
|
1.5. | Nennprofil |
1.6. | Wirkliche |
1.7. | Wirkliches Profil |
1.8. | Bezugsbereich |
1.9. | Bezugselement |
1.10. | Angrenzende |
1.11. | Angrenzende Ebene |
1.12. | Angrenzender Zylinder |
1.13. | Angrenzendes Profil |
1.14. | Angrenzende Gerade |
1.15. | Angrenzender Kreis |
1.16. | Angrenzendes |
1.17. | Wirkliche Achse |
1.18. | Geometrische Achse einer wirklichen |
1.19. | Formabweichung |
1.20. | Formtoleranz |
1.21. | Zone der Formotoleranz |
1.22. | Basiselement |
1.23. | System von Basiselementen |
1.24. |
|
1.25. | Gemeinsame Achse |
1.26. | Gemeinsame Symmetrieebene |
1.27. | Nennlage |
1.28. | Wirkliche Lage |
1.29. | Lageabweichung |
1.30. | Lagetoleranz |
1.31. | Zone der Lagetoleranz |
1.32. | Herausragende Zone der Lagetoleranz |
1.33. |
|
1.34. |
|
1.35. | Kombinierte Form- und Lageabweichung |
1.36. | Kombinierte Form- und Lagetoleranz |
1.37. | Zone der kombinierten Form- und Lagetoleranz |
2.1.1. | Geradheitsabweichung in einer Ebene |
2.1.2. | Geradheitstoleranz |
2.1.3. | Zone der Geradheitstoleranz in einer Ebene |
2.1.4. | Geradheitsabweichung im Raum |
2.1.5. | Geradheitsabweichung in vorgegebener Richtung |
2.1.6. | Zone der Geradheitstoleranz im Raum |
2.2.1. | Ebenheitsabweichung |
2.2.2. | Ebenheitstoleranz |
2.2.3. | Zone der Ebenheitstoleranz |
2.3.1. | Kreisformabweichung |
2.3.2. | Kreisformtoleranz |
2.3.3. | Zone der Kreisformtoleranz |
2.4.1. | Zylinderformabweichung |
2.4.2. | Zylinderformtoleranz |
2.4.3. | Zone der Zylinderformtoleranz |
2.5.1. | Abweichung des |
2.5.2. | Toleranz des |
2.5.3. | Zone der Toleranz des |
3.1.1. | Parallelitatsabweichung zweiter Ebenen |
3.1.2. |
|
3.1.3. | Zone der |
3.1.4. |
|
3.1.5. | Zone der |
3.1.6. |
|
3.1.7. | Zone der |
3.1.8. |
|
3.1.8.1. | Achsneigungsabweichung |
3.1.8.2. |
|
3.1.8.3. | Achsneigungstoleranz |
3.1.8.4. |
|
3.1.9. | Zone der |
3.2.1. | Rechtwinkligkeitsabweichung zweier Ebenen |
3.2.2. | Rechtwinkligkeitstoleranz |
3.2.3. | Zone der Rechtwinkligkeitstoleranz zweier Ebenen |
3.2.4. | Rechtwinkligkeitsabweichung einer Ebene oder Geraden zu einer Geraden |
3.2.5. | Zone der Rechtwinkligkeitstoleranz einer Ebene oder Geraden zu einer Geraden |
3.2.6. | Rechtwinkligkeitsabweichung einer Geraden zu einer Ebene in einer vorgebenen Richtung |
3.2.7. | Zone der Richtwinkligkeitstoleranz einer Geraden zu einer Ebene in einer vorgegebenen Richtung |
3.2.8. | Rechtwinkligkeitsabweichung einer Geraden zu einer Ebene |
3.2.9. | Zone der Rechtwinkligkeitstoleranz einer Geraden zu einer Ebene |
3.3.1. | Winklegkeitsabweichung einer Ebene zu einer Ebene oder Geraden |
3.3.2. | Winkligkeitstoleranz |
3.3.3. | Zone der Winkligkeitstoleranz einer Ebene zu einer Ebene oder Geraden |
3.3.4. | Winkligkeitsabweichung einer Geraden zu einer Geraden oder Ebene |
3.3.5. | Zone der Winkligkeitstoleranz einer Geraden zu einer Geraden oder Ebene |
3.4.1. |
|
3.4.2. |
|
3.4.3. | Zone der |
3.5.1. | Symmetrieabweichung |
3.5.2. | Symmetrietoleranz |
3.5.3. | Zone der Symmetrietoleranz |
3.6.1. | Positionsabweichung |
3.6.2. | Positionstoleranz |
3.6.3. | Zone der Positionstoleranz einer Geraden in einer Ebene |
3.6.4. | Zone der Positionstoleranz einer Geraden im Raum |
3.6.5. | Zone der Positionstoleranz einer Ebene oder Geraden in einer vorgegebenen Richtung |
3.7.1. | Kreuzungsabweichung zweier Achsen |
3.7.2. | Kreuzungstoleranz zweier Achsen |
3.7.3. | Zone der Kreuzungstoleranz zweier Achsen |
4.1.1. | Rundlaufabweichung |
4.1.2. | Rundlauftoleranz |
4.1.3. | Zone der Rundlauftoleranz |
4.2.1. | Stirnlaufabweichung |
4.2.2. | Stirnlauftoleranz |
4.2.3. | Zone der Stirnlauftoleranz |
4.3.1. | Laufabweichung in der vorgegebenen Richtung |
4.3.2. | Lauftoleranz in der vorgegebenen Richtung |
4.3.3. | Zone der Lauftoleranz in der vorgegebenen Richtung |
4.4.1. | Gesamtrundlaufabweichung |
4.4.2. | Gesamtrundlauftoleranz |
4.4.3. | Zone der Gesamtrundlauftoleranz |
4.5.1. | Gesamtstirnlaufabweichung |
4.5.2. | Gesamtstirnlauftoleranz |
4.5.3. | Zone der Gesamtstirnlauftoleranz |
4.6.1. | Abweichung von der vorgegebenen Profilform |
4.6.2. | Toleranz der vorgegebenen Profilform |
4.6.3. | Zone der Toleranz der vorgegebenen Profilform |
4.7.1. | Abweichung von der vorgegebenen |
4.7.2. | Toleranz der vorgegebenen |
4.7.3. | Zone der Toleranz der vorgegebenen |
УКАЗАТЕЛЬ ТЕРМИНОВ
На французском языке
1.1. |
|
1.2. | Profil |
1.3. | Forme nominale |
1.4. | Surface nominale |
1.5. | Profil nominale |
1.6. | Surface |
1.7. | Profil |
1.10. | Surface enveloppe |
1.11. | Plane enveloppe |
1.12. | Cylindre enveloppe |
1.13. | Profil enveloppe |
1.14. | Droite enveloppe |
1.15. | Cercle enveloppe |
1.16. | Profil enveloppe de la section longitudinale |
1.17. | Axe |
1.19. | Ecart de forme |
1.20. |
|
1.21. | Zone de |
1.22. |
|
1.23. |
|
1.25. | Axe commun |
1.26. | Plan de |
1.27. | Position nominale |
1.28. | Position |
1.29. | Ecart de position |
1.30. |
|
1.31. | Zone de |
1.32. | Zone de |
2.1.1. | Ecart de rectitude dans une plane |
2.1.2. |
|
2.1.3. | Zone de |
2.1.6. | Zone de |
2.2.1. | Ecart de |
2.2.2. |
|
2.2.3. | Zone de |
2.3.1. | Ecart de |
2.3.2. |
|
2.3.3. | Zone de |
2.4.1. | Ecart de |
2.4.2. |
|
2.4.3. | Zone de |
3.1.2. |
|
3.1.3. | Zone de |
3.1.5. | Zone de |
3.1.7. | Zone de |
3.1.9. | Zone de |
3.2.2. |
|
3.2.3. | Zone de |
3.2.5. | Zone de |
3.2.7. | Zone de |
3.2.9. | Zone de |
3.3.2. |
|
3.3.3. | Zone de |
3.3.5. | Zone de |
3.4.2. |
|
3.4.3. | Zone de |
3.5.2. |
|
3.5.3. | Zone de |
3.6.2. |
|
3.6.3. | Zone de |
3.6.4. | Zone de |
4.1.1. | Battement radial |
4.1.2. |
|
4.1.3. | Zone de |
4.2.1. | Battement axial |
4.2.2. |
|
4.2.3. | Zone de |
4.3.1. | Battement dans la direction de la |
4.3.2. |
|
4.3.3. | Zone de |
4.4.1. | Battement total, radial |
4.4.2. |
|
4.4.3. | Zone de |
4.5.1. | Battement total, axial |
4.5.2. |
|
4.6.2. |
|
4.6.3. | Zone de |
4.7.2. |
|
4.7.3. | Zone de |
Приложение 2. (Измененная редакция, Изм. N 1).
Приложение 3. (Исключено, Изм. N 1).
ПРИЛОЖЕНИЕ 4
Справочное
ДОПОЛНИТЕЛЬНЫЕ ПАРАМЕТРЫ ОТКЛОНЕНИЙ ФОРМЫ
В настоящем стандарте приведены термины и определения параметров отклонений формы, служащих для описания поверхностей и профилей в дополнение к количественной оценке отклонений формы, установленной в настоящем стандарте.
Примечания:
1. Для параметра, соответствующего количественной оценке отклонений формы по настоящему стандарту в тех случаях, когда его необходимо отличить от дополнительных параметров отклонений формы, следует применять термин "наибольшее отклонение формы" (соответственно "наибольшее отклонение от прямолинейности", "наибольшее отклонение от плоскостности" и т.д.).
2. Допуски формы не распространяются на дополнительные параметры отклонений формы, если это не оговорено особо.
1. Среднее арифметическое отклонение формы
1.1. Среднее арифметическое отклонение формы профиля - среднее арифметическое из абсолютных значений расстояний
или
между реальным профилем и средним профилем по нормали к среднему профилю в пределах нормируемого участка.
 (3)
(3)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (4)
. (4)
1.1.1. Среднее арифметическое отклонение от прямолинейности - среднее арифметическое из абсолютных значений расстояний
или
между реальным профилем и средней прямой в пределах нормируемого участка (черт.26).

1 - реальный профиль; 2 - средняя прямая
Черт.26
 (5)
(5)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (6)
. (6)
1.1.2. Среднее арифметическое отклонение от круглости ![]() - среднее арифметическое абсолютных значений расстояний
- среднее арифметическое абсолютных значений расстояний или
между реальным профилем и средней окружностью (черт.27).
1 - реальный профиль; 2 - средняя окружность
Черт.27
 (7)
(7)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (8)
. (8)
1.1.3. Среднее арифметическое отклонение профиля продольного сечения - среднее арифметическое из абсолютных значений расстояний
и
или
и
между реальным профилем и средним профилем продольного сечения в пределах нормируемого участка (черт.28).
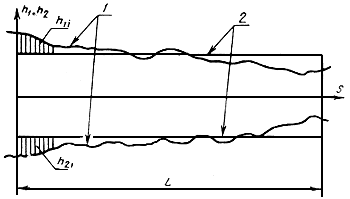
1 - реальный профиль; 2 - средний профиль продольного сечения
Черт.28
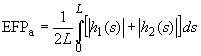 (9)
(9)
или при вычислении цифровыми методами
![]() , (10)
, (10)
где ![]()
и ![]()
![]() .
.
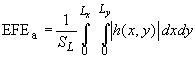
1.2. Среднее арифметическое отклонение формы поверхности - среднее арифметическое из абсолютных значений расстояний
![]() или
или между реальной поверхностью и средней поверхностью перпендикулярно или радиально к средней поверхности в пределах нормируемого участка.
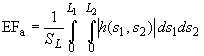 (11)
(11)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (12)
. (12)
1.2.1. Среднее арифметическое отклонение от плоскостности - среднее арифметическое из абсолютных значений расстояний
![]() или
или между реальной поверхностью и средней плоскостью в пределах нормируемого участка.
 (13)
(13)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (14)
. (14)
1.2.2 Среднее арифметическое отклонение от цилиндричности - среднее арифметическое из абсолютных значений расстояний
![]() или
или между реальной поверхностью и средним цилиндром в пределах нормируемого участка.
 (15)
(15)
или при вычислении цифровыми методами
![]() , где
, где ![]() . (16)
. (16)
2. Среднее квадратичное отклонение формы
2.1. Среднее квадратичное отклонение формы профиля - среднее квадратичное расстояний
или
между реальным профилем и средним профилем по нормали к среднему профилю в пределах нормируемого участка.
 (17)
(17)
или при вычислении цифровыми методами
 , где
, где ![]() . (18)
. (18)
2.1.1. Среднее квадратичное отклонение от прямолинейности ![]() - среднее квадратичное расстояний
- среднее квадратичное расстояний или
между реальным профилем и средней прямой в пределах нормируемого участка (черт.26).
 (19)
(19)
или при вычислении цифровыми методами
 , где
, где ![]() . (20)
. (20)
2.1.2 Среднее квадратичное отклонение от круглости ![]() - среднее квадратичное расстояний
- среднее квадратичное расстояний или
между реальным профилем и средней окружностью (черт.27).
 (21)
(21)
или при вычислении цифровыми методами
 , где
, где ![]() . (22)
. (22)
2.1.3. Среднее квадратичное отклонение профиля продольного сечения - среднее квадратичное расстояний
и
или
и
между реальным профилем и средним профилем продольного сечения в пределах нормируемого участка (черт.28).
 (23)
(23)
или при вычислении цифровыми методами
 , (24)
, (24)
где ![]()
и ![]()
![]() .
.
2.2. Среднее квадратичное отклонение формы поверхности - среднее квадратичное расстояний
![]() или
или между реальной поверхностью и средней поверхностью по нормали средней поверхности в пределах нормируемого участка.
 (25)
(25)
или при вычислении цифровыми методами
 , где
, где ![]() . (26)
. (26)
2.2.1. Среднее квадратичное отклонение от плоскостности ![]() - среднее квадратичное расстояний
- среднее квадратичное расстояний ![]() или
или между реальной поверхностью и средней плоскостью в пределах нормируемого участка.
 (27)
(27)
или при вычислении цифровыми методами
 , где
, где ![]() . (28)
. (28)
2.2.2. Среднее квадратичное отклонение от цилиндричности - среднее квадратичное расстояние
![]() или
или между реальной поверхностью и средним цилиндром в пределах нормируемого участка.
 (29)
(29)
или при вычислении цифровыми методами
 , где
, где ![]() . (30)
. (30)
3. Количество проходов через нуль - количество точек пересечения реального профиля со средним профилем в пределах нормируемого участка или на периметре (черт.29 и 30).
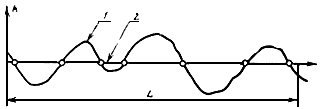
1 - реальный профиль; 2 - средняя прямая
Черт.29
1 - реальный профиль; 2 - средняя окружность
Черт.30
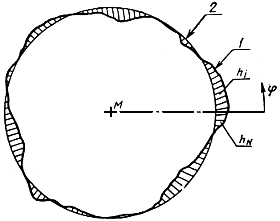
4. Количество волн - количество волн на периметре сечения поверхности вращения, причем одна волна охватывает участок, заключенный между тремя соседними точками пересечения реального профиля со средней окружностью.
![]() .
.
ПРИЛОЖЕНИЕ 5
Справочное
АЛФАВИТНЫЙ УКАЗАТЕЛЬ ТЕРМИНОВ
На русском языке
База | 1.22 |
Биение в заданном направлении | 4.3.1 |
Биение радиальное | 4.1.1 |
Биение радиальное полное | 4.4.1 |
Биение торцовое | 4.2.1 |
Биение торцовое полное | 4.5.1 |
Допуск биения в заданном направлении | 4.3.2 |
Допуск биения радиального | 4.1.2 |
Допуск биения радиального полного | 4.4.2 |
Допуск биения торцового | 4.2.2 |
Допуск биения торцового полного | 4.5.2 |
Допуск круглости | 2.3.2 |
Допуск наклона | 3.3.2 |
Допуск параллельности | 3.1.2 |
Допуск параллельности осей в общей плоскости | 3.1.8.3 |
Допуск параллельности прямых в общей плоскости | 3.1.8.3 |
Допуск перекоса осей | 3.1.8.4 |
Допуск перекоса прямых | 3.1.8.4 |
Допуск пересечения осей | 3.7.2 |
Допуск перпендикулярности | 3.2.2 |
Допуск плоскостности | 2.2.2 |
Допуск позиционный | 3.6.2 |
Допуск профиля продольного сечения | 2.5.2 |
Допуск прямолинейности | 2.1.2 |
Допуск расположения | 1.30 |
Допуск расположения зависимый | 1.33 |
Допуск расположения независимый | 1.34 |
Допуск симметричности | 3.5.2 |
Допуск соосности | 3.4.2 |
Допуск формы и расположения суммарный | 1.36 |
Допуск формы | 1.20 |
Допуск формы зависимый | 1.33 |
Допуск формы заданного профиля | 4.6.2 |
Допуск формы заданной поверхности | 4.7.2 |
Допуск формы независимый | 1.34 |
Допуск цилиндричности | 2.4.2 |
Комплект баз | 1.23 |
Окружность прилегающая | 1.15 |
Ось общая | 1.25 |
Ось реальная | 1.17 |
Ось реальной поверхности вращения геометрическая | 1.18 |
Отклонение наклона оси относительно оси или плоскости | 3.3.4 |
Отклонение наклона плоскости относительно оси или плоскости | 3.3.1 |
Отклонение наклона прямой относительно прямой или плоскости | 3.3.4 |
Отклонение от круглости | 2.3.1 |
Отклонение от параллельности осей в пространстве | 3.1.8 |
Отклонение от параллельности осей в общей плоскости | 3.1.8.1 |
Отклонение от параллельности прямых в общей плоскости | 3.1.8.1 |
Отклонение от параллельности прямых в пространстве | 3.1.8 |
Отклонение от параллельности оси и плоскости | 3.1.4 |
Отклонение от параллельности прямой и плоскости | 3.1.4 |
Отклонение от параллельности плоскостей | 3.1.1 |
Отклонение от параллельности прямых в плоскости | 3.1.6 |
Отклонение от пересечения осей | 3.7.1 |
Отклонение от перпендикулярности оси относительно плоскости | 3.2.8 |
Отклонение от перпендикулярности оси относительно плоскости в заданном направлении | 3.2.6 |
Отклонение от перпендикулярности плоскости или оси относительно оси | 3.2.4 |
Отклонение от перпендикулярности плоскостей | 3.2.1 |
Отклонение от перпендикулярности прямой относительно плоскости | 3.2.8 |
Отклонение от перпендикулярности прямой относительно плоскости в заданном направлении | 3.2.6 |
Отклонение от перпендикулярности прямой относительно прямой | 3.2.4 |
Отклонение от плоскостности | 2.2.1 |
Отклонение от прямолинейности в плоскости | 2.1.1 |
Отклонение от прямолинейности в заданном направлении | 2.1.5 |
Отклонение от прямолинейности в пространстве | 2.1.4 |
Отклонение от симметричности | 3.5.1 |
Отклонение от соосности | 3.4.1 |
Отклонение от цилиндричности | 2.4.1 |
Отклонение позиционное | 3.6.1 |
Отклонение профиля продольного сечения | 2.5.1 |
Отклонение расположения | 1.29 |
Отклонение формы | 1.19 |
Отклонение формы заданного профиля | 4.6.1 |
Отклонение формы заданной поверхности | 4.7.1 |
Отклонение формы и расположения суммарное | 1.35 |
Перекос осей | 3.1.8.2 |
Перекос прямых | 3.1.8.2 |
Плоскость прилегающая | 1.11 |
Плоскость симметрии общая | 1.26 |
Поверхность номинальная | 1.4 |
Поверхность прилегающая | 1.10 |
Поверхность реальная | 1.6 |
Поле допуска биения в заданном направлении | 4.3.3 |
Поле допуска круглости | 2.3.3 |
Поле допуска наклона оси относительно оси или плоскости | 3.3.5 |
Поле допуска наклона плоскости относительно плоскости или оси | 3.3.3 |
Поле допуска наклона прямой относительно прямой | 3.3.5 |
Поле допуска параллельности осей в пространстве | 3.1.9 |
Поле допуска параллельности оси и плоскости | 3.1.5 |
Поле допуска параллельности плоскостей | 3.1.3 |
Поле допуска параллельности прямой и плоскости | 3.1.5 |
Поле допуска параллельности прямых в плоскости | 3.1.7 |
Поле допуска параллельности прямых в пространстве | 3.1.9 |
Поле допуска пересечения осей | 3.7.3 |
Поле допуска перпендикулярности оси относительно плоскости | 3.2.9 |
Поле допуска перпендикулярности оси относительно плоскости в заданном направлении | 3.2.7 |
Поле допуска перпендикулярности плоскости или оси относительно оси | 3.2.5 |
Поле допуска перпендикулярности плоскостей | 3.2.3 |
Поле допуска перпендикулярности прямой относительно плоскости | 3.2.9 |
Поле допуска перпендикулярности прямой относительно плоскости в заданном направлении | 3.2.7 |
Поле допуска перпендикулярности прямой относительно прямой | 3.2.5 |
Поле допуска плоскостности | 2.2.3 |
Поле допуска полного радиального биения | 4.4.3 |
Поле допуска полного торцового биения | 4.5.3 |
Поле допуска профиля продольного сечения | 2.5.3 |
Поле допуска прямолинейности в плоскости | 2.1.3 |
Поле допуска прямолинейности в пространстве | 2.1.6 |
Поле допуска радиального биения | 4.1.3 |
Поле допуска расположения | 1.31 |
Поле допуска расположения выступающее | 1.32 |
Поле допуска симметричности | 3.5.3 |
Поле допуска соосности | 3.4.3 |
Поле допуска торцового биения | 4.2.3 |
Поле допуска формы | 1.21 |
Поле допуска формы заданного профиля | 4.6.3 |
Поле допуска формы заданной поверхности | 4.7.3 |
Поле допуска цилиндричности | 2.4.3 |
Поле позиционного допуска оси в плоскости | 3.6.3 |
Поле позиционного допуска оси в пространстве | 3.6.4 |
Поле позиционного допуска прямой в плоскости | 3.6.3 |
Поле позиционного допуска прямой в пространстве | 3.6.4 |
Поле позиционного допуска плоскости симметрии или оси в заданном направлении | 3.6.5 |
Поле суммарного допуска формы и расположения | 1.37 |
Профиль | 1.2 |
Профиль номинальный | 1.5 |
Профиль прилегающий | 1.13 |
Профиль прилегающий продольного сечения | 1.16 |
Профиль реальный | 1.7 |
Прямая прилегающая | 1.14 |
Расположение номинальное | 1.27 |
Расположение реальное | 1.28 |
Участок базирования | 1.24 |
Участок нормируемый | 1.8 |
Форма номинальная | 1.3 |
Цилиндр прилегающий | 1.12 |
Элемент | 1.1 |
Элемент базовый для оценки отклонения формы | 1.9 |
ПРИЛОЖЕНИЕ 6
Справочное
АЛФАВИТНЫЙ УКАЗАТЕЛЬ ОБОЗНАЧЕНИЙ
| - номинальные размеры между элементами | 3.6.1 |
| - наибольшее и наименьшее расстояние между элементами | 3.1 |
| - отклонения наиболее удаленной точки реального профиля от касательной прямой | 1.14; 1.16 |
- торцовое биение | 4.2.1 | |
- биение в заданном направлении | 4.3.1 | |
- отклонение формы заданной поверхности | 4.7.1 | |
- отклонение формы заданного профиля | 4.6.1 | |
- радиальное биение | 4.1.1 | |
| - полное торцовое биение | 4.5.1 |
| - полное радиальное биение | 4.4.1 |
- отклонение от плоскостности | 2.2.1 | |
- отклонение от круглости | 2.3.1 | |
- отклонение от прямолинейности | 2.1 | |
- отклонение профиля продольного сечения | 2.5.1 | |
- отклонение от цилиндричности | 2.4.1 | |
- отклонение от параллельности | 3.1 | |
| - отклонение от параллельности осей (прямых) в общей плоскости | 3.1.8.1 |
| - перекос осей (прямых) | 3.1.8.2 |
| - отклонение от соосности | 3.4.1 |
- отклонение наклона | 3.3 | |
- позиционное отклонение | 3.6.1 | |
- отклонение от перпендикулярности | 3.2 | |
- отклонение от симметричности | 3.5.1 | |
- отклонение от пересечения осей | 3.7.1 | |
| - длина нормируемого участка | 1; 2; 3; 4 |
| - радиусы окружностей, описанных вокруг реального профиля или вписанных в него | 1.15 |
- допуск торцового биения | 4.2.2 | |
- допуск биения в заданном направлении | 4.3.2 | |
- допуск формы заданной поверхности | 4.7.2 | |
- допуск формы заданного профиля | 4.6.2 | |
- допуск радиального биения | 4.1.2 | |
| - допуск полного торцового биения | 4.5.2 |
| - допуск полного радиального биения | 4.4.2 |
- допуск плоскостности | 2.2.2 | |
- допуск круглости | 2.3.2 | |
- допуск прямолинейности | 2.1.2 | |
- допуск профиля продольного сечения | 2.5.2 | |
- допуск цилиндричности | 2.4.2 | |
- допуск параллельности | 3.1.2 | |
| - допуск параллельности осей (прямых) в общей плоскости | 3.1.8.3 |
| - допуск перекоса осей (прямых) | 3.1.8.4 |
- допуск соосности | 3.4.2 | |
- допуск наклона | 3.3.2 | |
- позиционный допуск | 3.6.2 | |
- допуск перпендикулярности | 3.2.2 | |
- допуск симметричности | 3.5.2 | |
- допуск пересечения осей | 3.7.2 | |
| - номинальные значения координат точек профиля или поверхности | 4.6.1; 4.7.1 |
- номинальный угол между элементами | 3.3 |
Приложения 5, 6. (Введены дополнительно, Изм. N 1).
Текст документа сверен по:
Изделия из древесины и древесных материалов.
Допуски и посадки: Сб. ГОСТов. -
М.: ИПК Издательство стандартов, 2002
{kind=link}