ГОСТ ISO 7135-2014
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
ГИДРАВЛИЧЕСКИЕ ЭКСКАВАТОРЫ
Термины, определения и технические характеристики для коммерческой документации
Earth-moving machinery. Hydraulic excavators. Terminology and commercial specifications
МКС 01.040.53; 53.100
Дата введения 2025-01-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Государственным комитетом по стандартизации Республики Беларусь
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации по переписке (протокол от 14 ноября 2014 г. № 72-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Институт стандартизации Молдовы |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 26 января 2024 г. № 80-ст межгосударственный стандарт ГОСТ ISO 7135-2014 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2025 г.
5 Настоящий стандарт идентичен международному стандарту ISO 7135:2009* "Машины землеройные. Гидравлические экскаваторы. Терминология и технические характеристики для коммерческой документации" ("Earth-moving machinery - Hydraulic excavators - Terminology and commercial specifications", IDT).
Международный стандарт разработан подкомитетом SC 4 "Терминология, коммерческая номенклатура, классификация и оценка" технического комитета по стандартизации ISO/ТC 127 "Землеройные машины" Международной организации по стандартизации (ISO).
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
1 Область применения
Настоящий стандарт устанавливает термины, определения и содержание технических характеристик для коммерческой документации самоходных гусеничных, колесных гидравлических экскаваторов, а также рабочее и сменное оборудование.
Настоящий стандарт применяется для общих составных частей и не рассматривает термины или технические характеристики для коммерческой документации на шагающие экскаваторы.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
ISO 3450:2011* Earth-moving machinery - Braking systems of rubber-tyred machines - Systems and performance requirements and test procedures (Машины землеройные. Колесные машины или скоростные машины на резиновых гусеницах. Требования к эффективности и методы испытаний тормозных систем)
________________
* На территории Российской Федерации действует ГОСТ Р ИСО 3450-99 "Машины землеройные. Тормозные системы колесных машин. Требования к эффективности и методы испытаний".
ISO 5010:2007 Earth-moving machinery - Rubber-tyred machines - Steering requirements (Машины землеройные. Машины на резиновых шинах. Требования к системам рулевого управления)
ISO 6014:1986 Earth-moving machinery - Determination of ground speed (Машины землеройные. Определение скорости движения)
ISO 6015:2006** Earth-moving machinery - Hydraulic excavators and backhoe loaders - Methods of determining tool forces (Машины землеройные. Экскаваторы. Методы измерения усилий на рабочих органах)
________________
** На территории Российской Федерации действует ГОСТ Р ИСО 6015-2010 "Машины землеройные. Гидравлические экскаваторы и экскаваторы-погрузчики. Методы измерения усилий на рабочих органах".
ISO 6165:2006*** Earth-moving machinery - Basic types - Identification and terms and definitions (Машины землеройные. Основные типы. Идентификация, термины и определения)
________________
*** На территории Российской Федерации действует ГОСТ Р ИСО 6165-2010 "Машины землеройные. Классификация. Термины и определения".
ISO 6746-1:2003 Earth-moving machinery - Definitions of dimensions and codes - Part 1: Base machine (Машины землеройные. Определение и условные обозначения размерных характеристик. Часть 1. Базовая машина)
ISO 6746-2:2003, Earth-moving machinery - Definitions of dimensions and codes - Part 2: Equipment and attachments (Машины землеройные. Определение и условные обозначения размерных характеристик. Часть 2. Оборудование и приспособления)
ISO 9249:2007 Earth-moving machinery - Engine test code - Net power (Машины землеройные. Правила испытаний двигателей. Полезная мощность)
ISO 10265:2008 Earth-moving machinery - Crawler machines - Performance requirements and test procedures for braking systems (Машины землеройные. Гусеничные машины. Требования к эксплуатационным характеристикам и методы испытаний тормозных систем)
ISO 10567:2007 Earth-moving machinery - Hydraulic excavators - Lift capacity (Машины землеройные. Гидравлические экскаваторы. Грузоподъемность)
ISO 14396:2002 Reciprocating internal combustion engines - Determination and method for the measurement of engine power - Additional requirements for exhaust emission tests in accordance with ISO 8178 (Двигатели внутреннего сгорания поршневые. Определение и метод измерения мощности двигателя. Дополнительные требования к испытаниям выброса отработавших газов в соответствии с ISO 8178)
3 Термины и определения
В настоящем стандарте применены термины по ISO 6165, ISO 6746-1 и ISO 6746-2, а также следующие термины с соответствующими определениями.
3.1 Общие положения
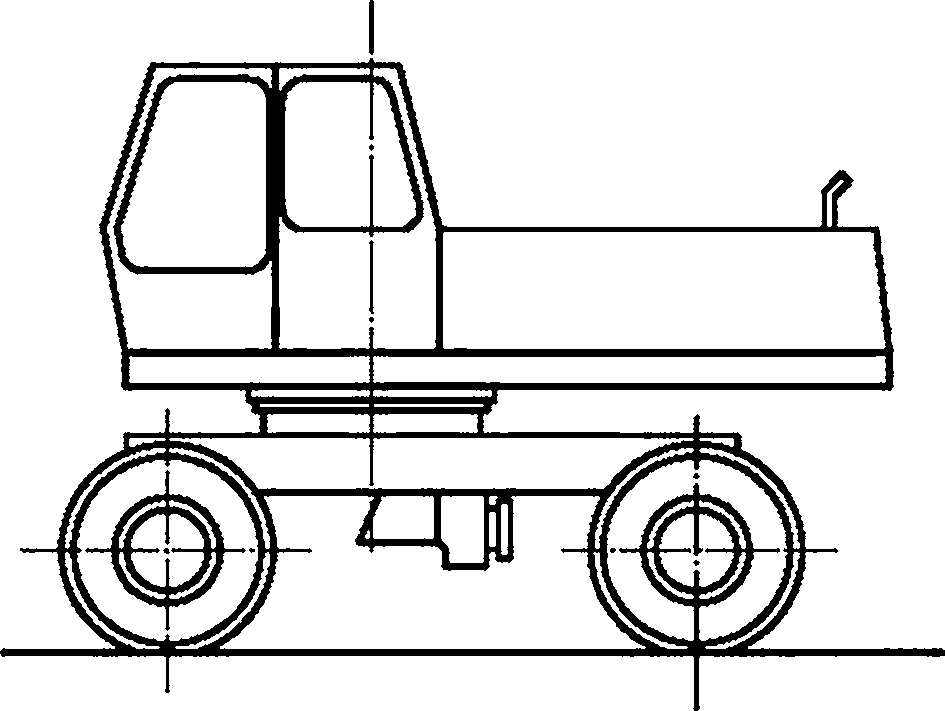
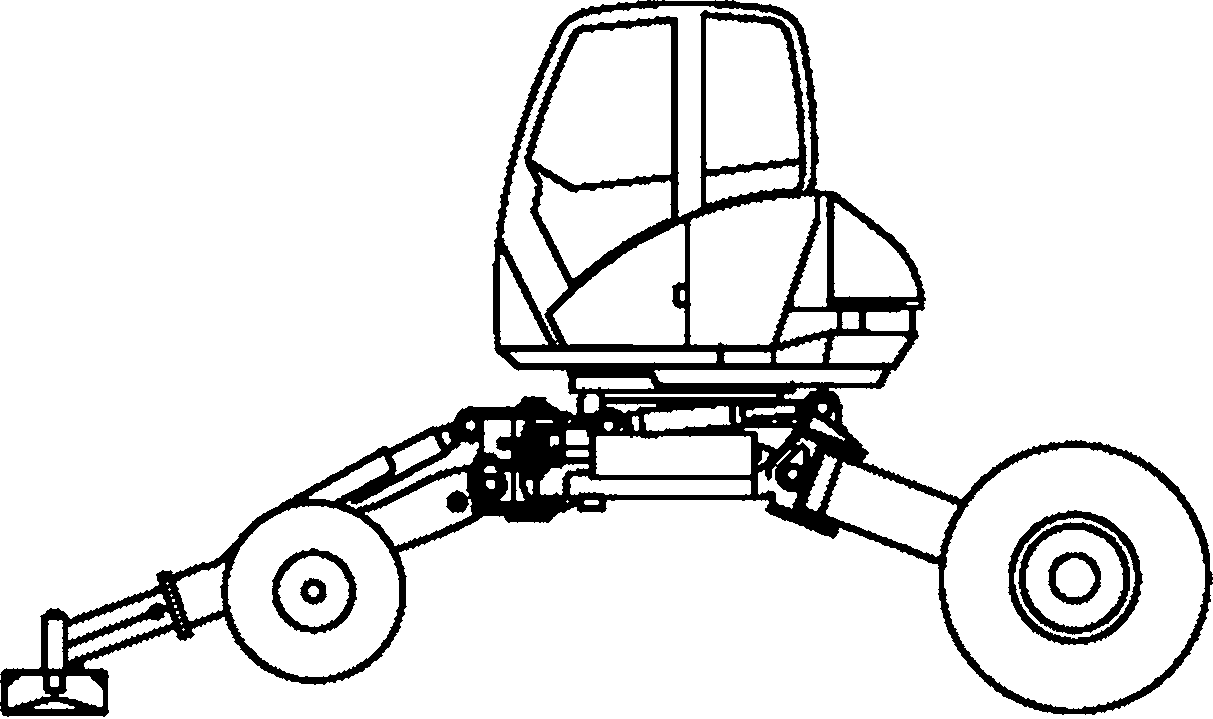
3.1.1 экскаватор (excavator): Самоходная машина на колесном, гусеничном или шагающем ходу, имеющая верхнюю часть, способную поворачиваться на 360°, предназначенная главным образом для копания с помощью ковша без перемещения ходовой части в течение всего рабочего цикла машины.
Примечание 1 - Рабочий цикл экскаватора включает в себя следующие операции: копание, подъем, перемещение с поворотом и разгрузку материала.
Примечание 2 - Экскаватор также может использоваться для погрузки-разгрузки и перемещения материалов или предметов.
Примечание 3 - На рисунках 1-3 представлены типы экскаваторов, описанные в 3.1.1.1-3.1.1.3.
3.1.1.1 экскаватор с минимальным радиусом поворота (minimal swing radius excavator; MSRX): Экскаватор, предназначенный для работы в естественных условиях, имеющий поворотную платформу с малым радиусом поворота (рабочее и сменное оборудование поворачиваются в пределах 120% ширины ходовой части).
3.1.1.2 мини-экскаватор (compact excavator): Экскаватор, имеющий эксплуатационную массу не более 6000 кг.
3.1.1.3 шагающий экскаватор (walking excavator): Экскаватор, имеющий три опоры и более; опоры могут быть шарнирно-сочлененными и/или телескопическими и могут оснащаться колесами.
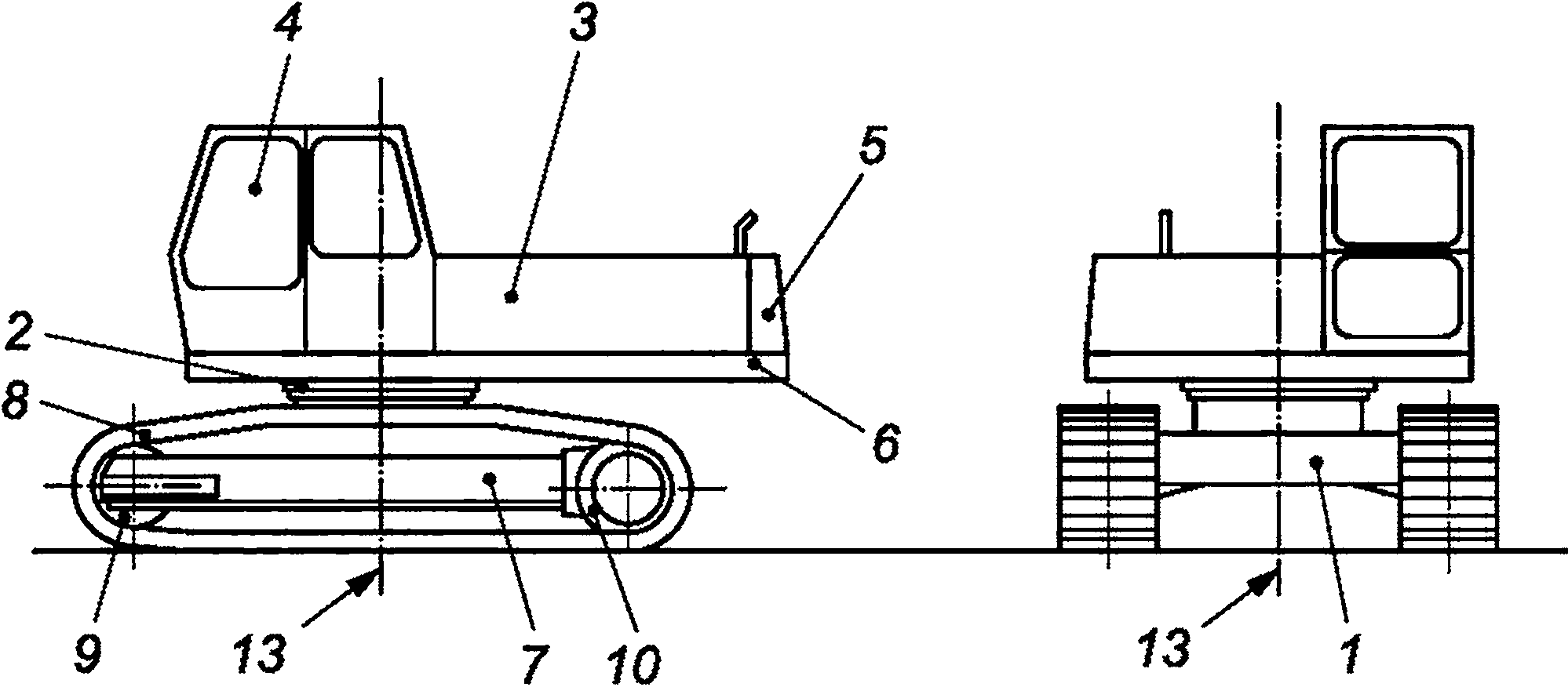
3.1.2 базовая машина (base machine): Экскаватор с кабиной или навесом и устройствами защиты оператора, если они необходимы, без рабочего оборудования или сменного оборудования, но оснащенный необходимыми приспособлениями для установки такого рабочего оборудования и сменного оборудования.
Примечание - На рисунках 4 и 5 приведено описание базовой машины и ее размерные характеристики.
3.1.3 подъемное устройство кабины (cab riser): Любое дополнительное устройство, увеличивающее высоту SIP более чем на 250 мм относительно обычного положения, или система, которая поднимает кабину над экскаватором с помощью механической или гидравлической системы.
Примечание - SIP (контрольная точка сиденья) см. в ISO 5353.
3.1.4 Положение рабочего и сменного оборудования
3.1.4.1 транспортное положение (transport position): Расположение рабочего и сменного оборудования, когда экскаватор устанавливается для погрузки или транспортирования на плоской ровной поверхности, например вагона или прицепа, согласно рекомендациям изготовителя.
Примечание - Минимальная габаритная длина и высота экскаватора будут зависеть от его положения.
3.1.4.2 положение маневрирования (manouvering position): Расположение рабочего и сменного оборудования, когда экскаватор устанавливается, согласно рекомендации изготовителя для выполнения необходимых при движении поворотов.
3.1.4.3 положение движения (travel position): Расположение рабочего и сменного оборудования, когда экскаватор устанавливается, согласно рекомендации изготовителя для продолжительного движения по прямой линии.
3.2 Массы
3.2.1 эксплуатационная масса (operating mass, OM): Масса базовой машины с рабочим оборудованием и порожним сменным оборудованием в наиболее тяжелом сочетании по массе элементов машины, определенных изготовителем, оператором (75 кг), с полностью заполненным топливным баком и заполненными до уровня, установленного изготовителем, всеми жидкостными системами (т.е. гидравлическая жидкость, трансмиссионное масло, моторное масло, охлаждающая жидкость); если установлена система смачивания, то наполовину заполненным баком для воды.
[ISO 6016:2008, терминологическая статья 3.2.1].
3.2.2 отгрузочная масса (shipping mass; SM): Масса машины без оператора с полностью заправленными гидросистемой, системами смазки и охлаждения, 10%-ной заправкой топливного бака и с рабочим оборудованием, кабиной, навесом, устройствами защиты при опрокидывании или от падающих предметов или без них по указанию изготовителя.
Примечание - При необходимости частичной разборки машины в целях перевозки массу разобранных узлов указывают дополнительно.
[ISO 6016:2008, терминологическая статья 3.2.6]
3.3 Сменное оборудование
3.3.1 сменное оборудование (attachment): Сборочные узлы, которые могут быть установлены на базовую машину или рабочее оборудование для специального использования.
[ISO 6746-2:2003, терминологическая статья 3.5]
Примечание - Сменное оборудование для гидравлических экскаваторов - это рабочий орган, прикрепленный к рукояти или телескопической стреле, который предназначен для копания, резания, захвата и обработки.
3.3.2 ковш обратной лопаты (hoe bucket, hoe-type bucket): Ковш, прикрепленный к рукояти или телескопической стреле и оборудованию, который режет в направлении машины.
См. рисунок 12.
3.3.3 грейферный ковш (grab-type bucket, grab bucket, clamshell bucket, clamshell-type bucket): Ковш, прикрепленный к рукояти и оборудованию, который копает или захватывает в вертикальном направлении, разгружая ниже и выше опорной плоскости отсчета (GRP).
См. рисунки 16 и 17.
3.3.4 ковш прямой лопаты (shovel bucket, shovel-type bucket): Ковш, прикрепленный к рукояти и оборудованию, который режет в направлении от машины и вверх, разгружая над опорной плоскостью отсчета (GRP).
См. рисунок 18.
3.3.5 быстросменная муфта (quick coupler): Сборочный узел, прикрепленный к концу рукояти и тяге, который способствует быстрому монтажу и демонтажу сменного оборудования с рукояти и тяги.
Примечание - Быстросменную муфту можно рассматривать как часть рабочего оборудования, если она установлена непосредственно на рукояти.
3.3.6 отвал (blade): Составная часть, установленная на ходовой части базовой машины, которая, как правило, используется для обратной засыпки траншей и для ограниченной выемки грунта, которую также можно использовать в качестве стабилизатора.
3.4 Рабочее оборудование
3.4.1 рабочее оборудование (equipment): Комплект составных частей, установленных на базовую машину, который позволяет сменному оборудованию выполнять первичные конструктивные функции экскаватора.
Примечание 1 - Определения 3.4.2-3.4.6 установлены исходя из основных геометрических кривых копания в самых распространенных случаях использования гидравлических экскаваторов.
Примечание 2 - Возможно применение другого произведенного рабочего оборудования.
Примечание 3 - На рисунках 6-21 представлены типы оборудования.
3.4.2 рабочее оборудование телескопической стрелы (telescopic boom equipment): Стрела с необходимым креплением для установки сменного оборудования, которая может выдвигаться и втягиваться и резать по направлению к машине посредством телескопического действия стрелы.
См. рисунок 21.
Примечание - Это оборудование используется преимущественно для выемки грунта и/или профилирования уклонов выше или ниже уровня поверхности земли.
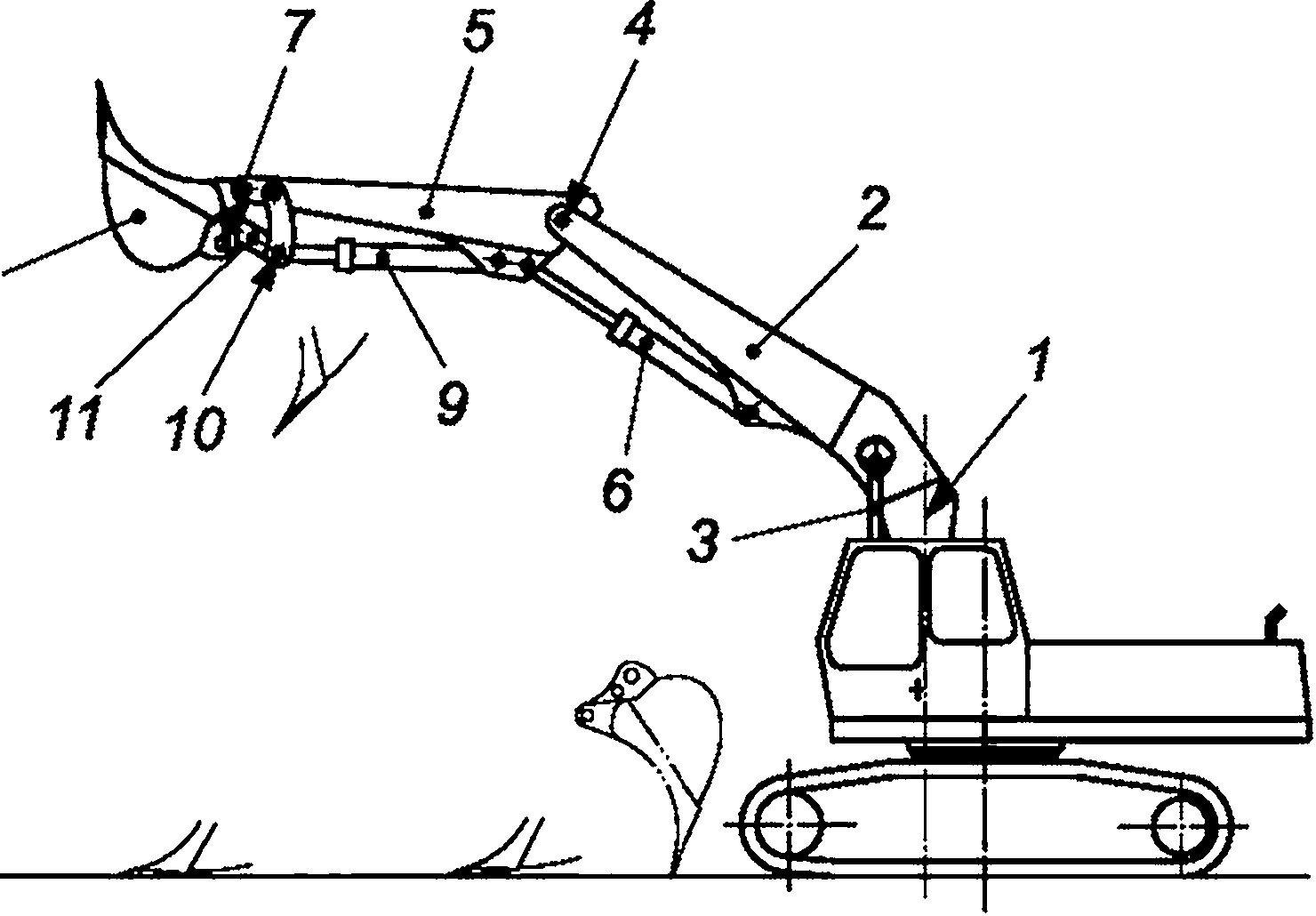
3.4.3 рабочее оборудование с ковшом обратной лопаты (hoe equipment): Стрела, рукоять и тяга с креплением для установки ковша с обратной лопатой, которые обычно режут в направлении машины.
См. рисунок 6.
Примечание - Данное оборудование используется преимущественно для выемки грунта ниже уровня земли.
3.4.4 рабочее оборудование с ковшом прямой лопаты (shovel equipment): Стрела, рукоять и тяга с креплением для установки ковша с прямой лопатой, которые обычно режут в направлении от машины и вверх.
См. рисунок 18.
Примечание - Данное оборудование используется преимущественно для выемки грунта выше уровня земли.
3.4.5 рабочее оборудование с грейферным ковшом (grab equipment, chamshell equipment): Стрела, рукоять и тяга с креплением для установки грейферного ковша, который копает или захватывает, как правило, в вертикальном направлении, выгружая ниже или выше GRP.
См. рисунок 25.
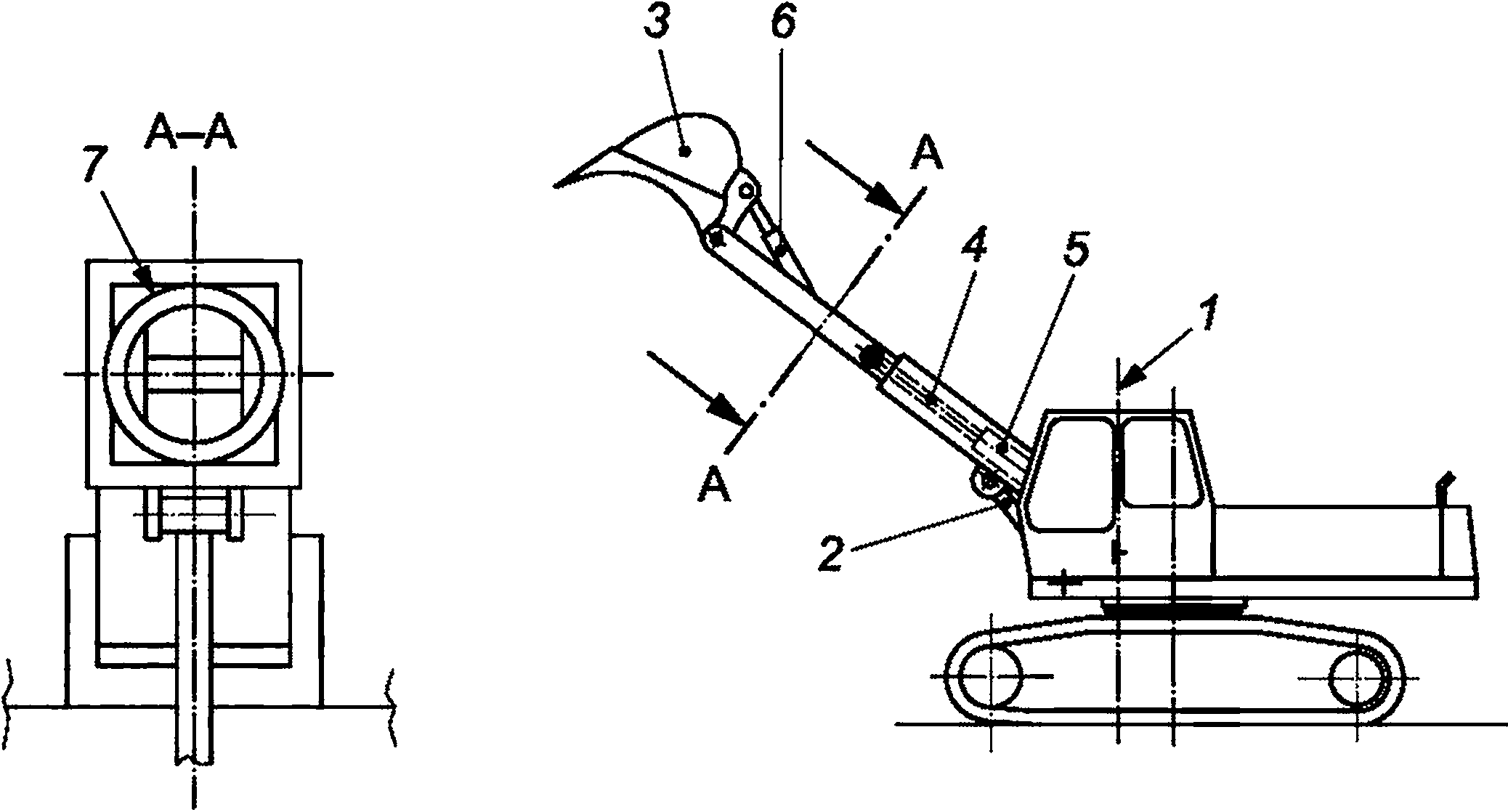
3.4.6 стрела поворотного типа (swing type boom): Стрела, установленная на передней стороне ходовой части, которая может складываться, благодаря чему машина может вынимать грунт под разными углами относительно продольной оси машины.
Примечание - Благодаря стреле поворотного типа машина может вынимать грунт рядом с вертикальной поверхностью.
4 Базовая машина
4.1 Классификация по типу
Экскаваторы классифицируются по своей ходовой части и применяемому рабочему оборудованию.
См. также раздел 5.
a) Шасси
- Гусеничный экскаватор (см. рисунок 1).
- Колесный экскаватор (см. рисунок 2).
- Шагающий экскаватор (см. рисунок 3).
 |
Рисунок 1 - Гусеничный экскаватор
 |
Рисунок 2 - Колесный экскаватор
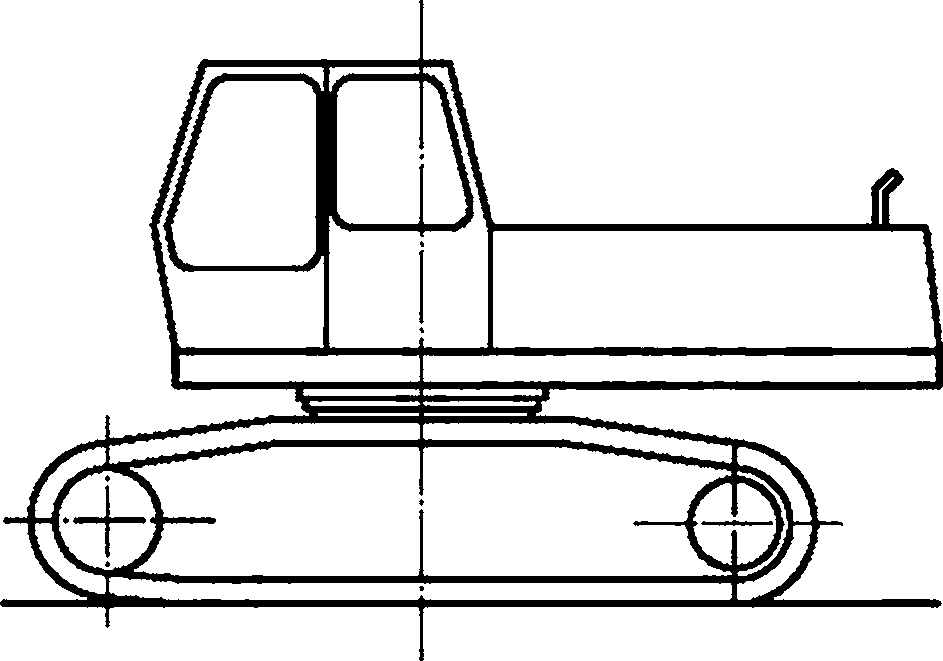 |
Рисунок 3 - Шагающий экскаватор
b) Рабочее оборудование
- Ковш обратной лопаты (см. рисунок 23).
- Ковш прямой лопаты (см. рисунок 24).
- Грейферный ковш (см. рисунок 25).
- Телескопическая стрела (см. рисунок 26).
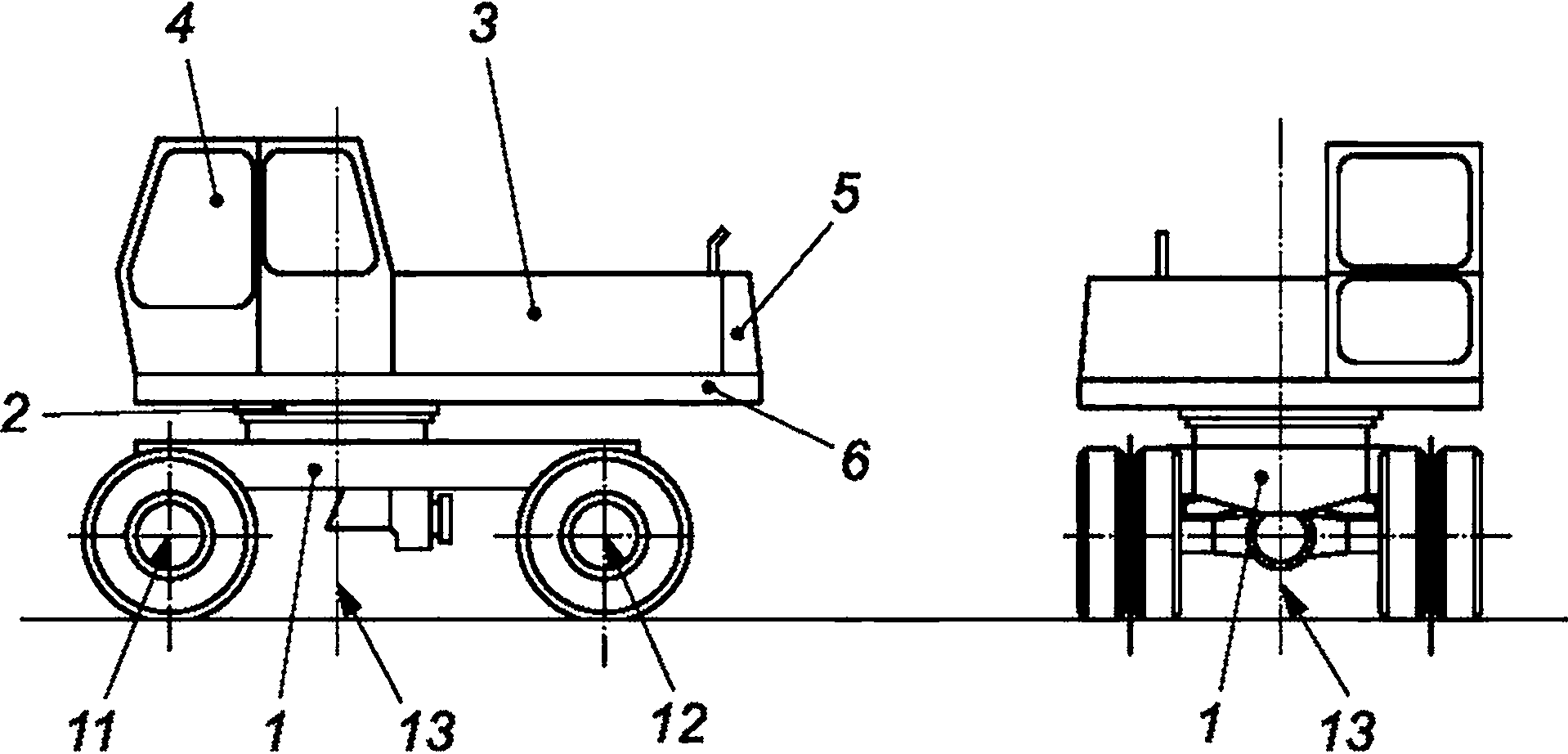
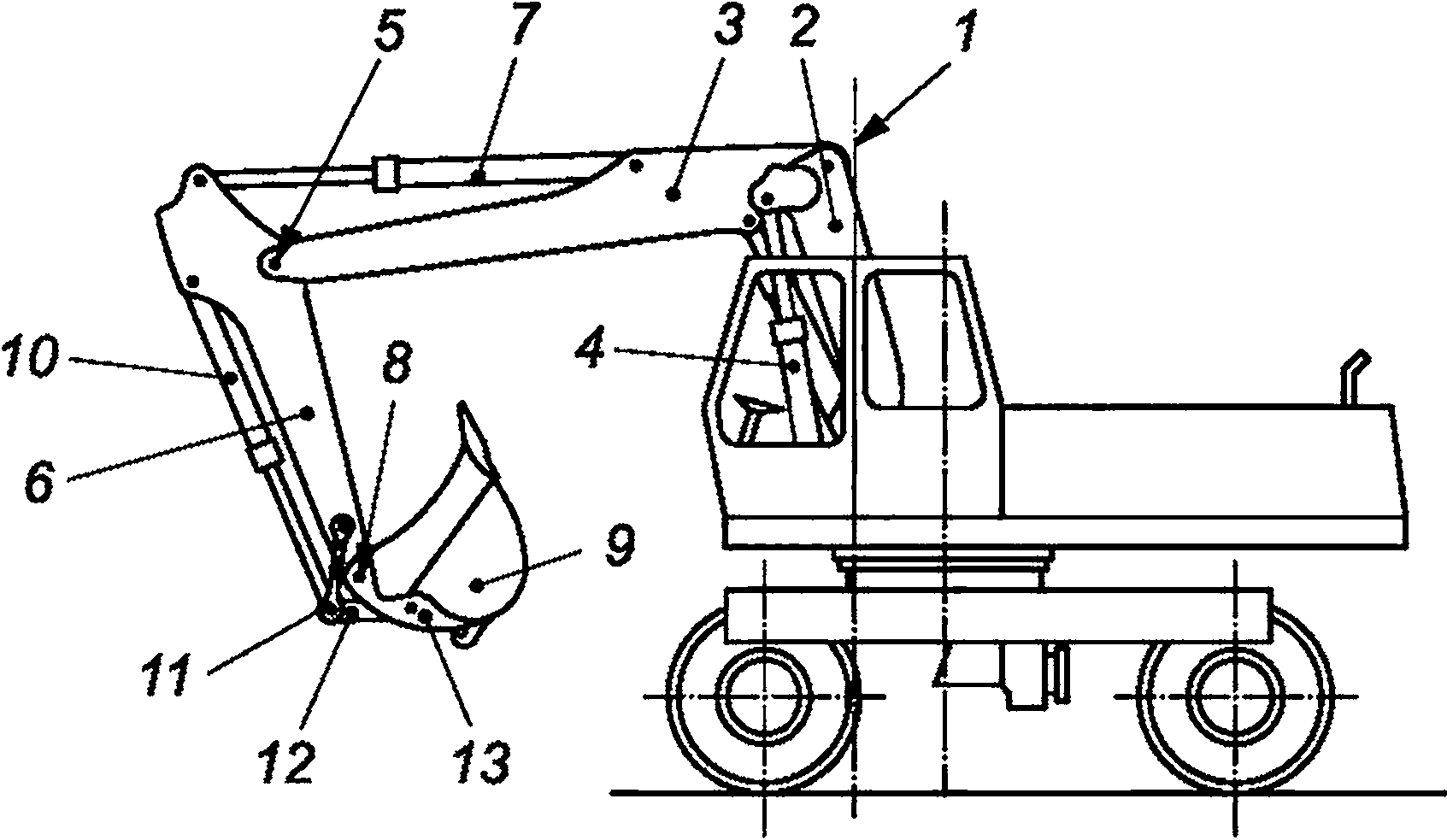
4.2 Наименование составных частей
Наименование составных частей должно быть в соответствии с рисунком 4, а) или b), в зависимости от того, является ли базовая машина гусеничным или колесным экскаватором.
 |
а) гусеничные экскаваторы
 |
b) колесные экскаваторы
1 - шасси; 2 - опора поворотной платформы; 3 - поворотная платформа; 4 - кабина; 5 - противовес; 6 - рама поворотной платформы; 7 - рама гусеничного шасси; 8 - гусеничный движитель; 9 - направляющее колесо; 10 - ведущее колесо; 11 - жесткая ось (задняя); 12 - жесткая ось (передняя); 13 - ось вращения
Рисунок 4 - Наименование составных частей базовой машины
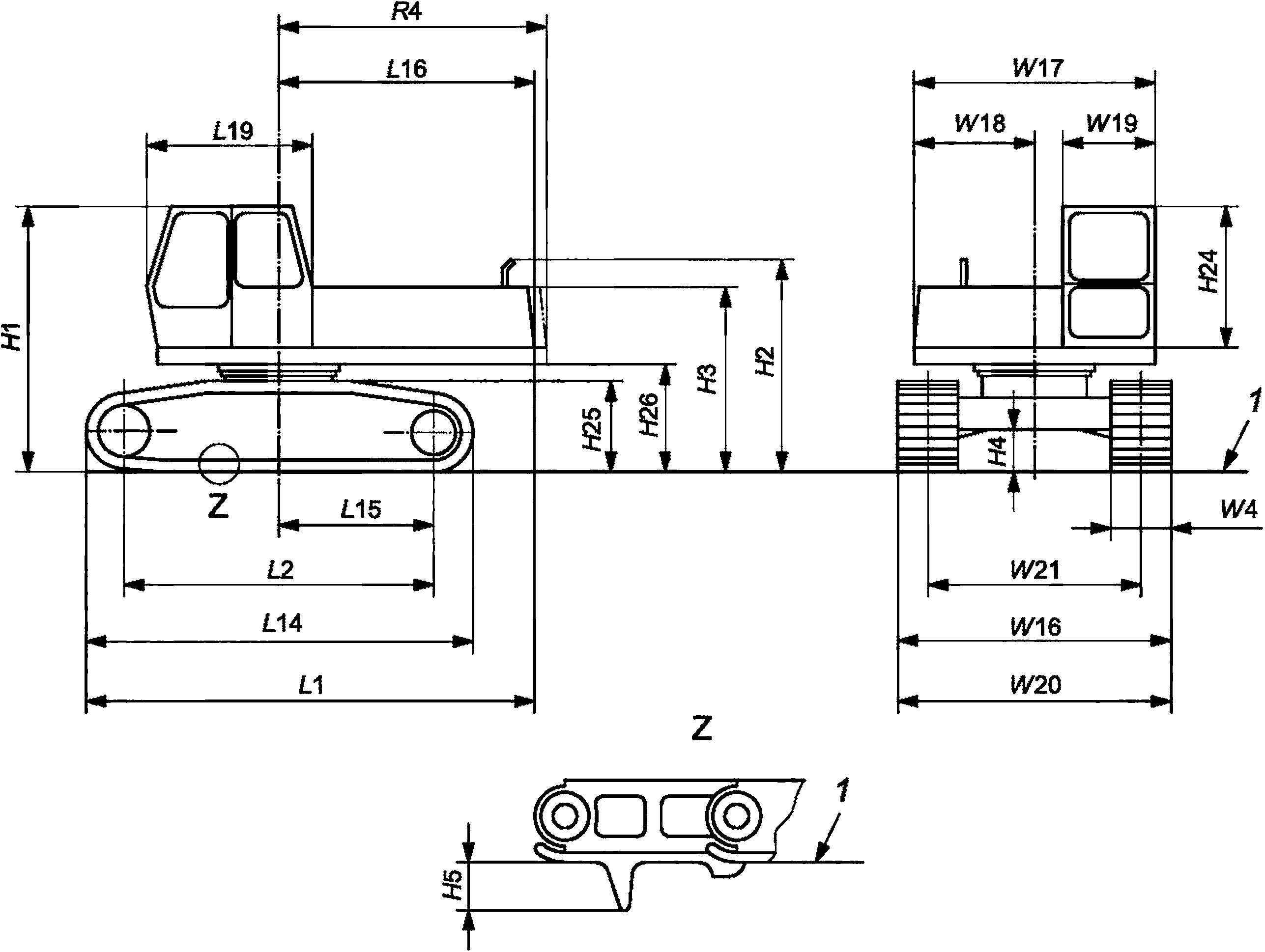
4.3 Размерные характеристики
Размерные характеристики базовой машины установлены на рисунке 5.
Определения размерных характеристик базовой машины, общих для землеройных машин, приведены в ISO 6746-1.
Размерные характеристики базовой машины, приведенные на рисунке 5, являются характерными для гидравлических экскаваторов и определены в приложении А.
 |
а) гусеничные экскаваторы
Рисунок 5, лист 1 - Размерные характеристики базовой машины
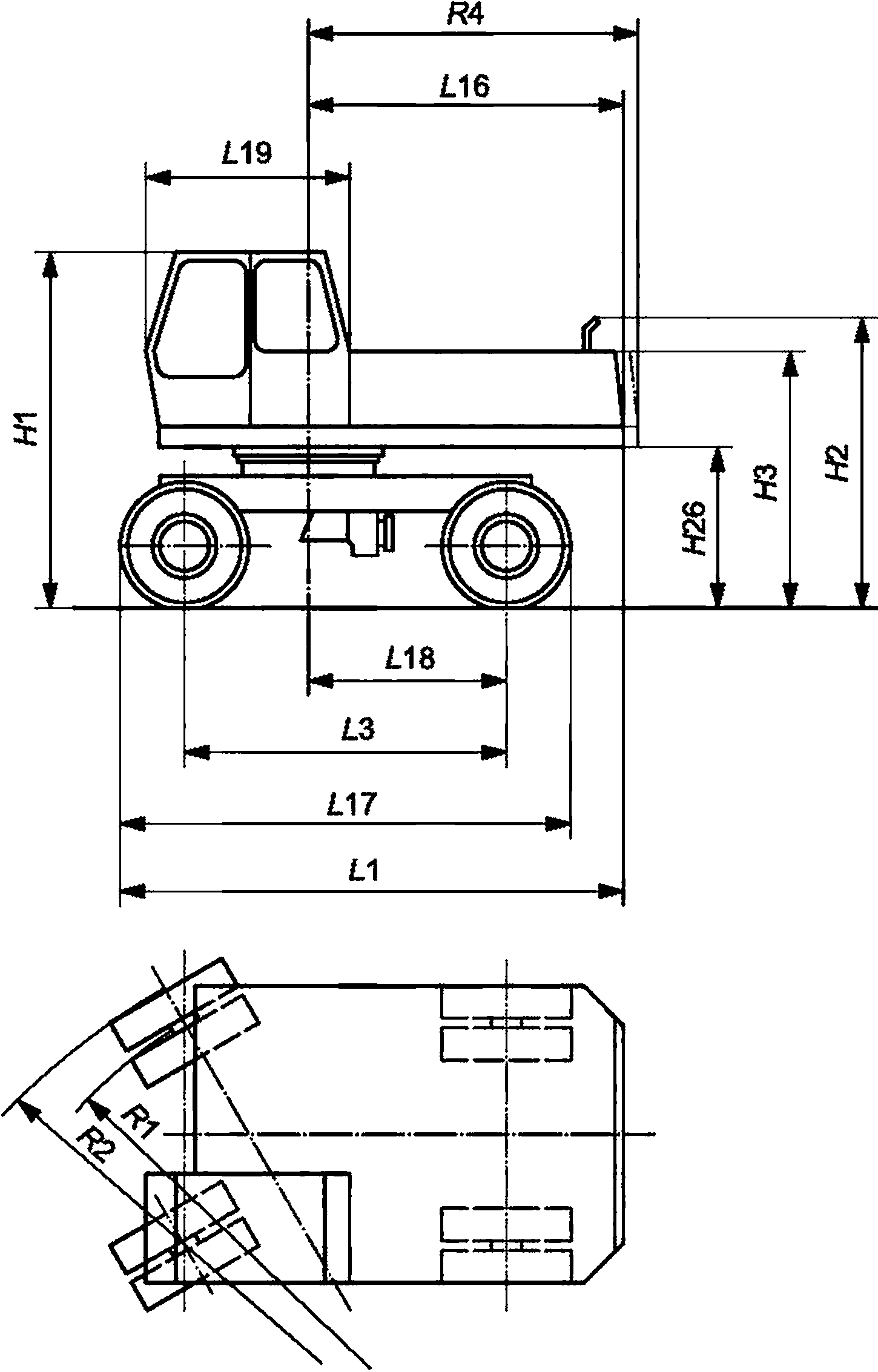
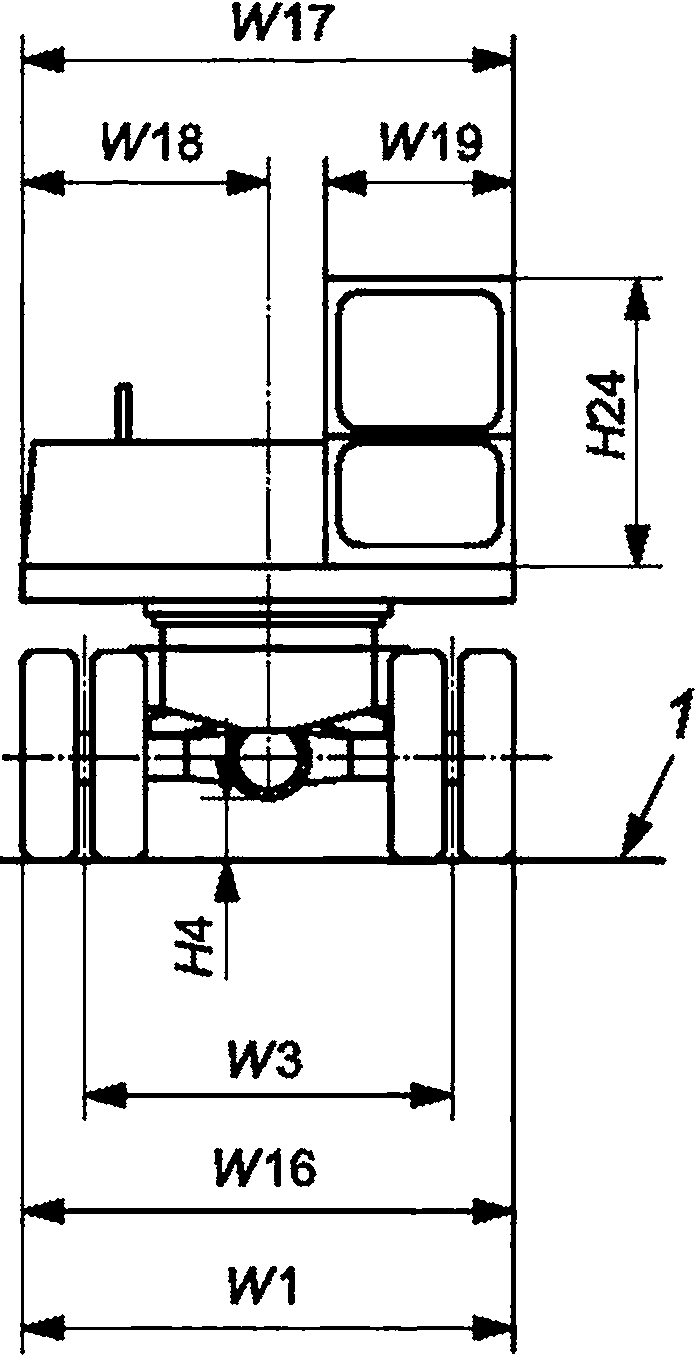
 |
b) колесные экскаваторы
1 - опорная плоскость отсчета (GRP)
Рисунок 5, лист 2
5 Рабочее и сменное оборудование
5.1 Наименования рабочего и сменного оборудования
Рабочее и сменное оборудование должно соответствовать рисункам 6-22.
 |
1 - ось вращения стрелы; 2 - ножка стрелы; 3 - промежуточная стрела; 4 - цилиндр стрелы; 5 - шарнир рукояти; 6 - рукоять; 7 - цилиндр рукояти; 8 - шарнир ковша; 9 - ковш; 10 - цилиндр ковша; 11 - управляющая кулиса; 12 - тяга ковша; 13 - держатель сменного оборудования
Рисунок 6 - Обратная лопата
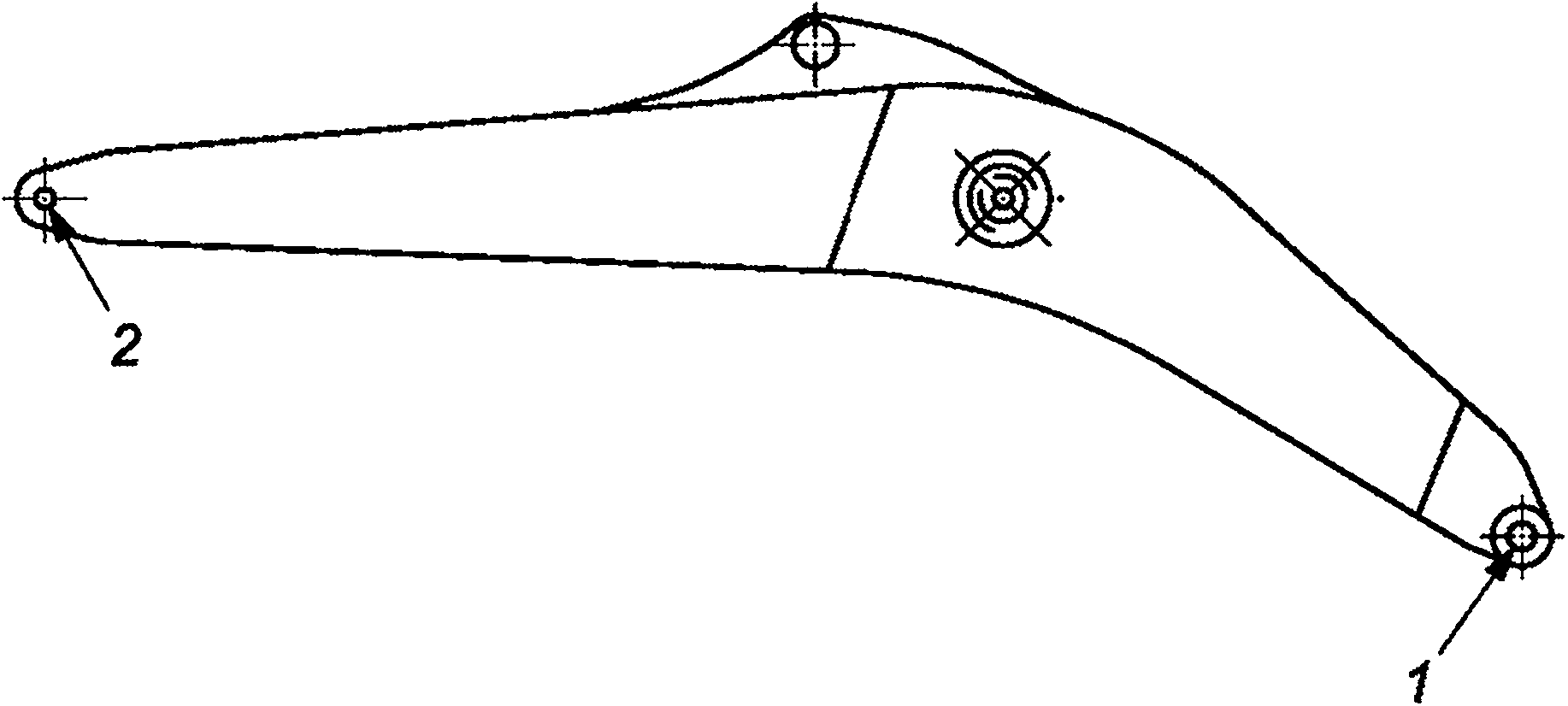
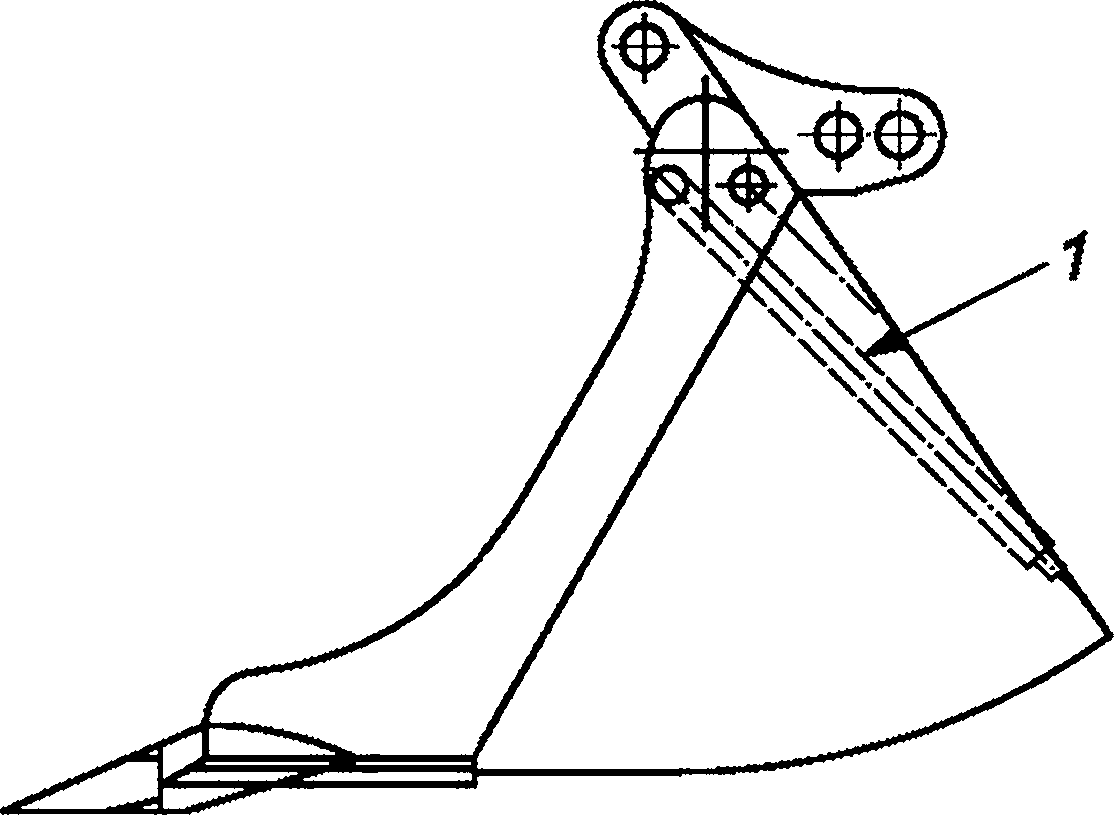
 |
1 - ось вращения стрелы; 2 - ось вращения рукояти
Рисунок 7 - Фронтальная моноблочная стрела
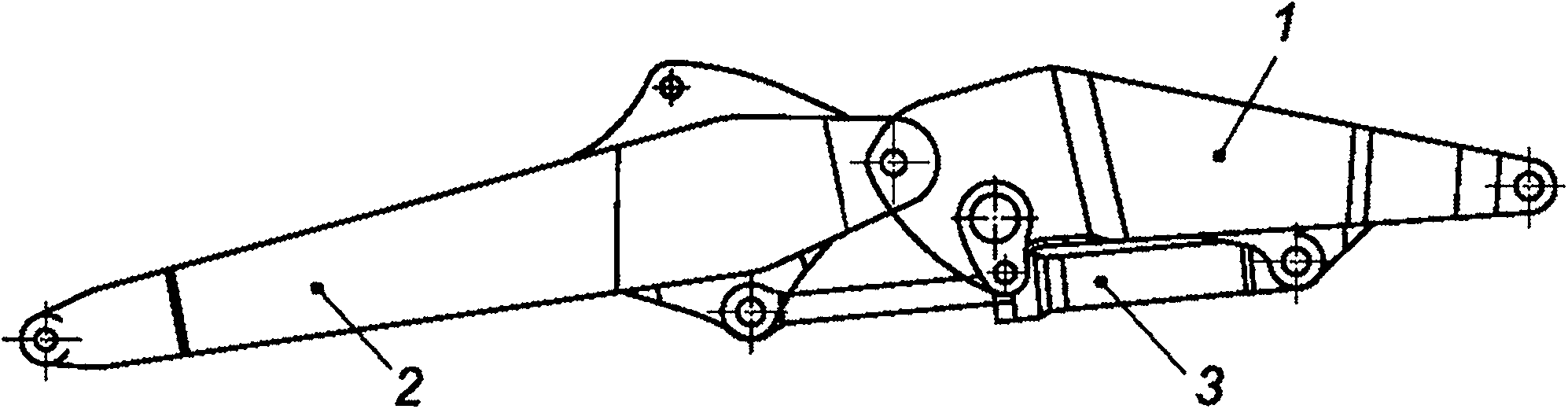
 |
1 - стрела; 2 - промежуточная стрела; 3 - цилиндр регулировки стрелы
Рисунок 8 - Гидравлическая стрела с регулируемой высотой сменного оборудования
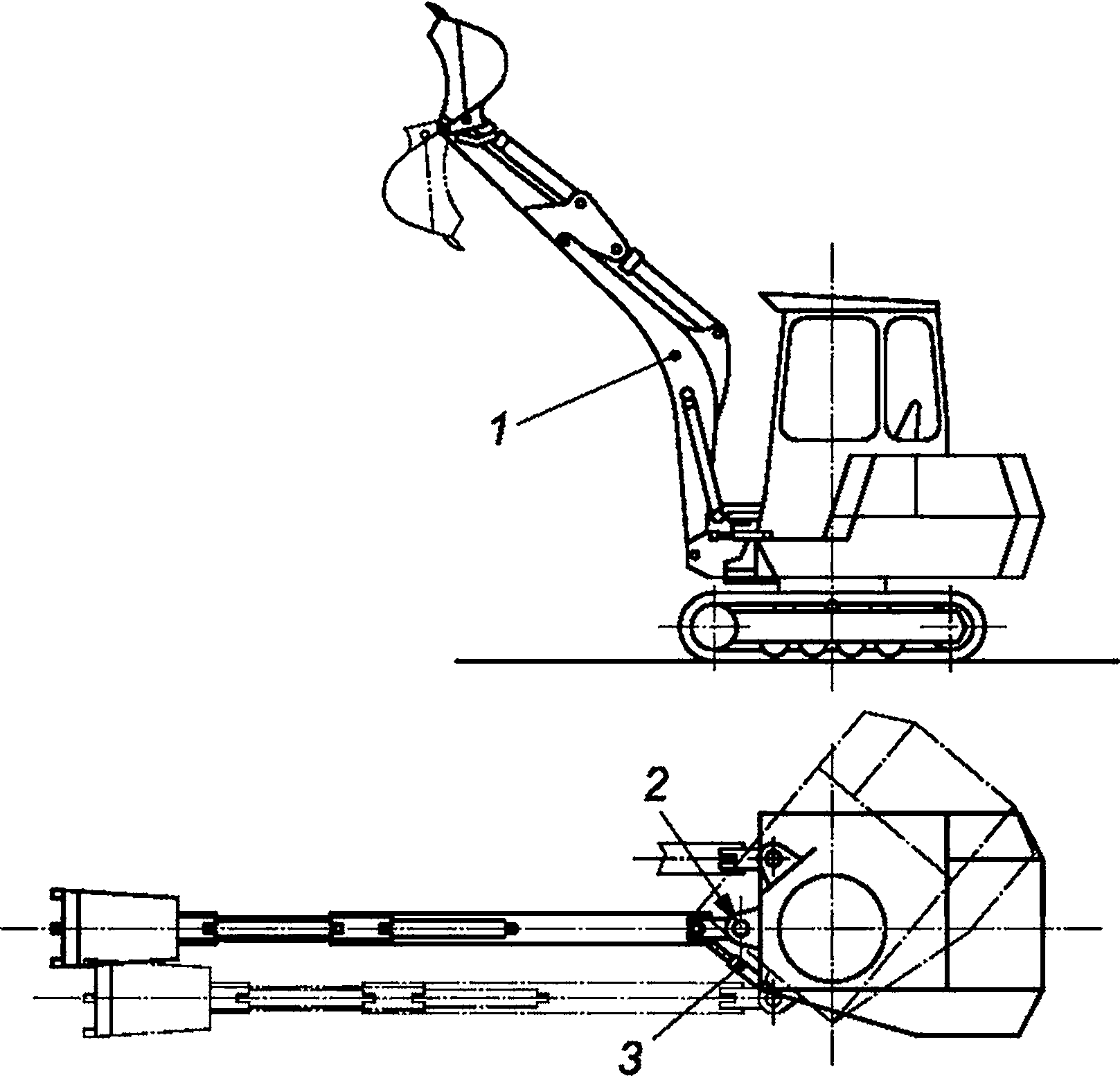
 |
1 - стрела; 2 - опора поворота; 3 - цилиндр поворота
Рисунок 9 - Стрела поворотного типа
 |
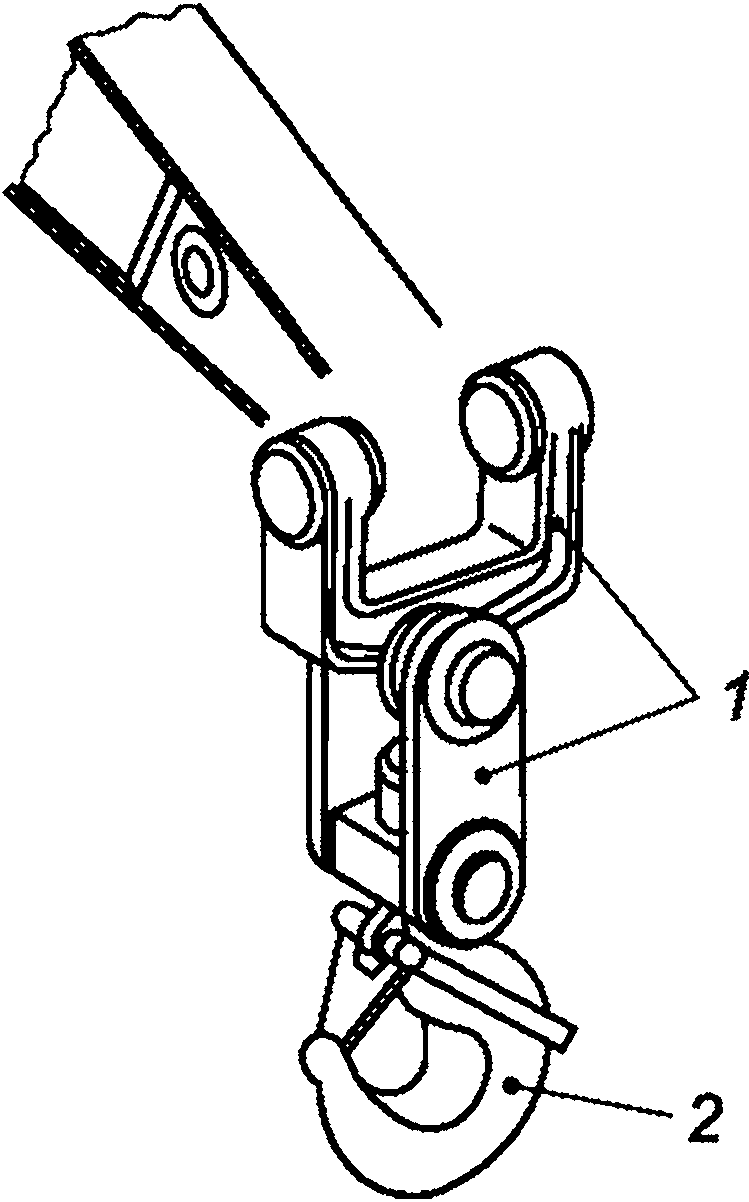
1 - соединительные шарниры; 2 - блокируемый (безопасный) крюк
Рисунок 10 - Крюковое оборудование
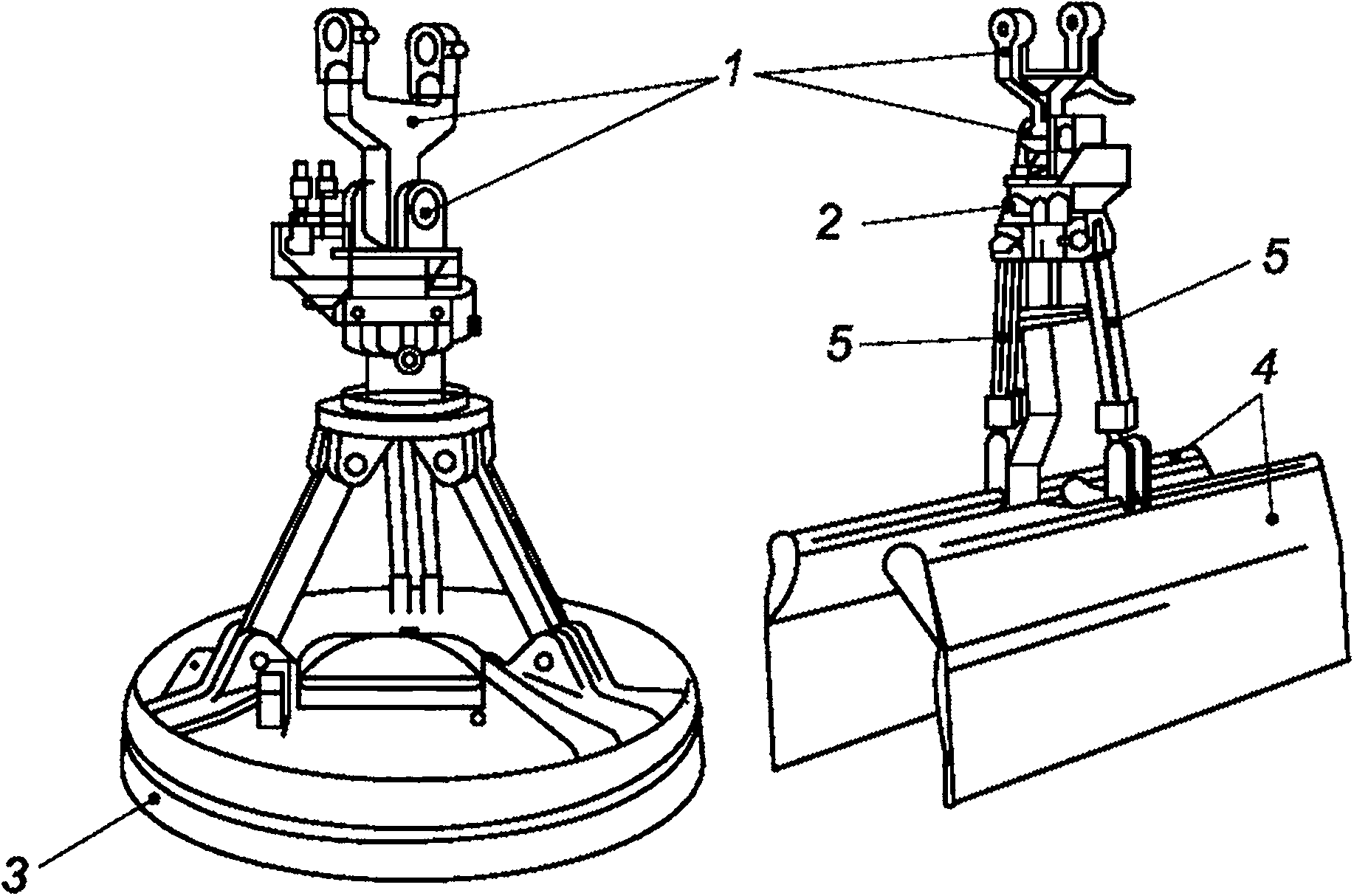
 |
1 - соединительные звенья; 2 - вращатель; 3 - магнитная плита; 4 - специальная плита для зажима; 5 - цилиндр
Рисунок 11 - Оборудование для перемещения материалов
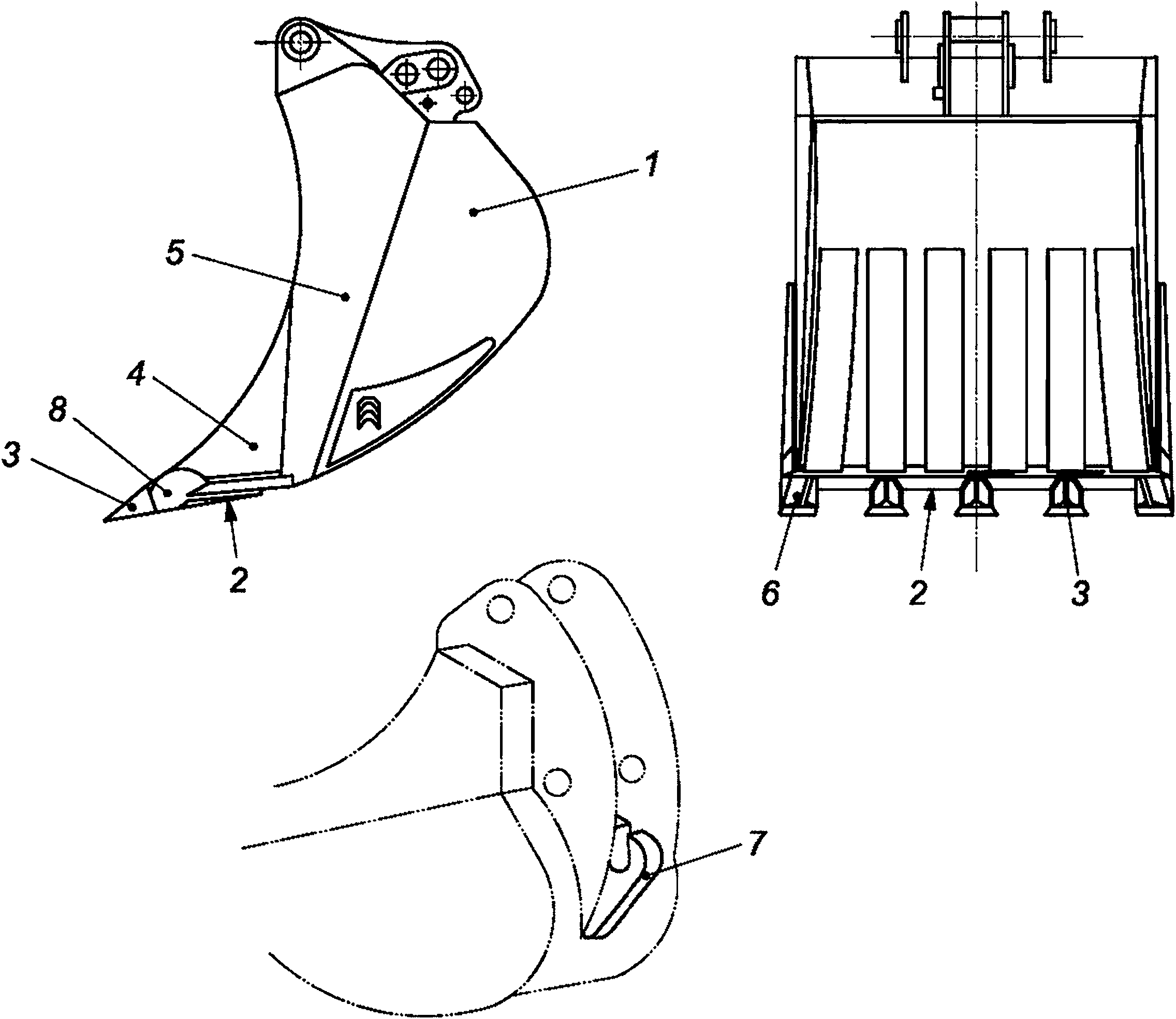
 |
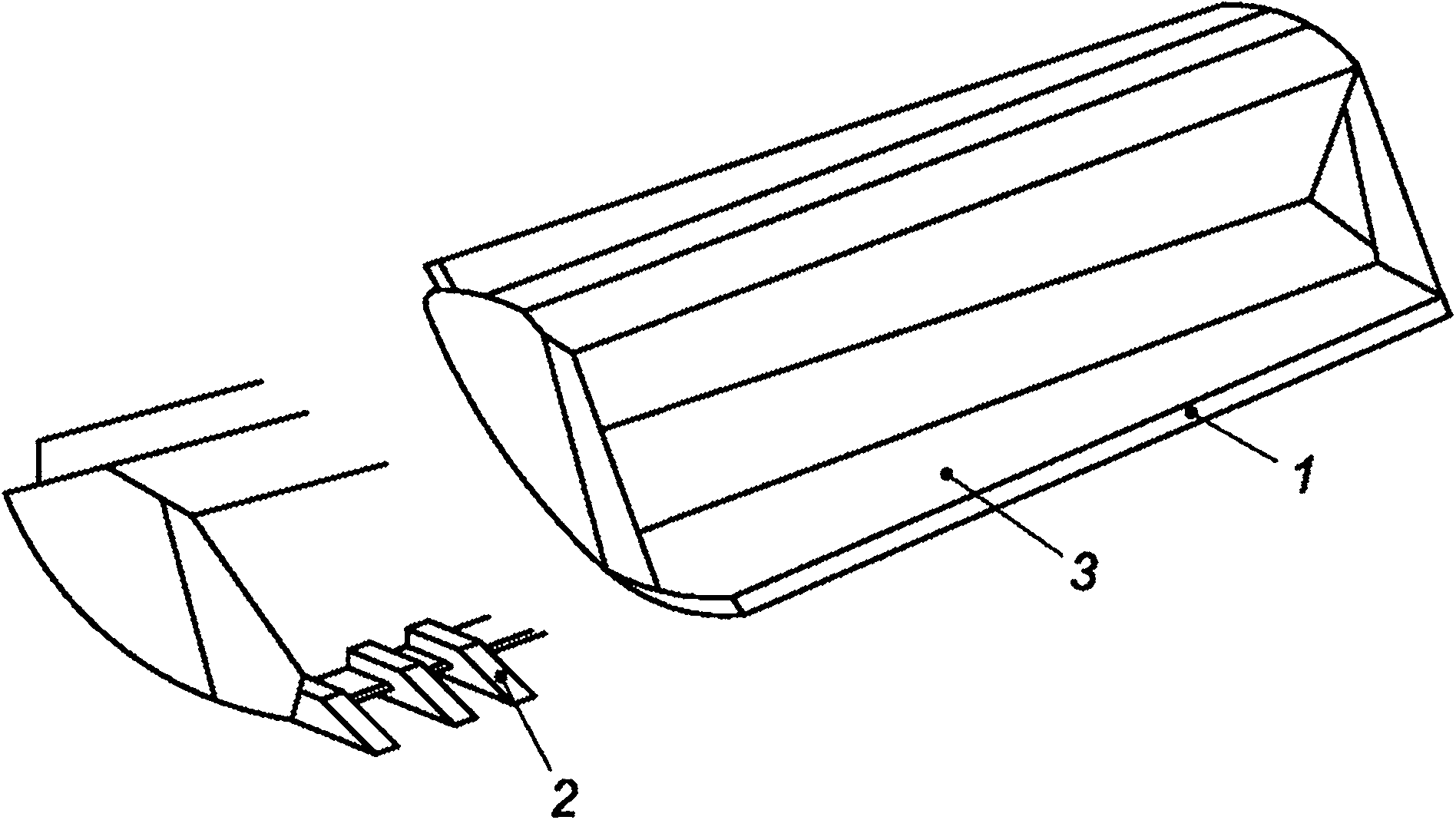
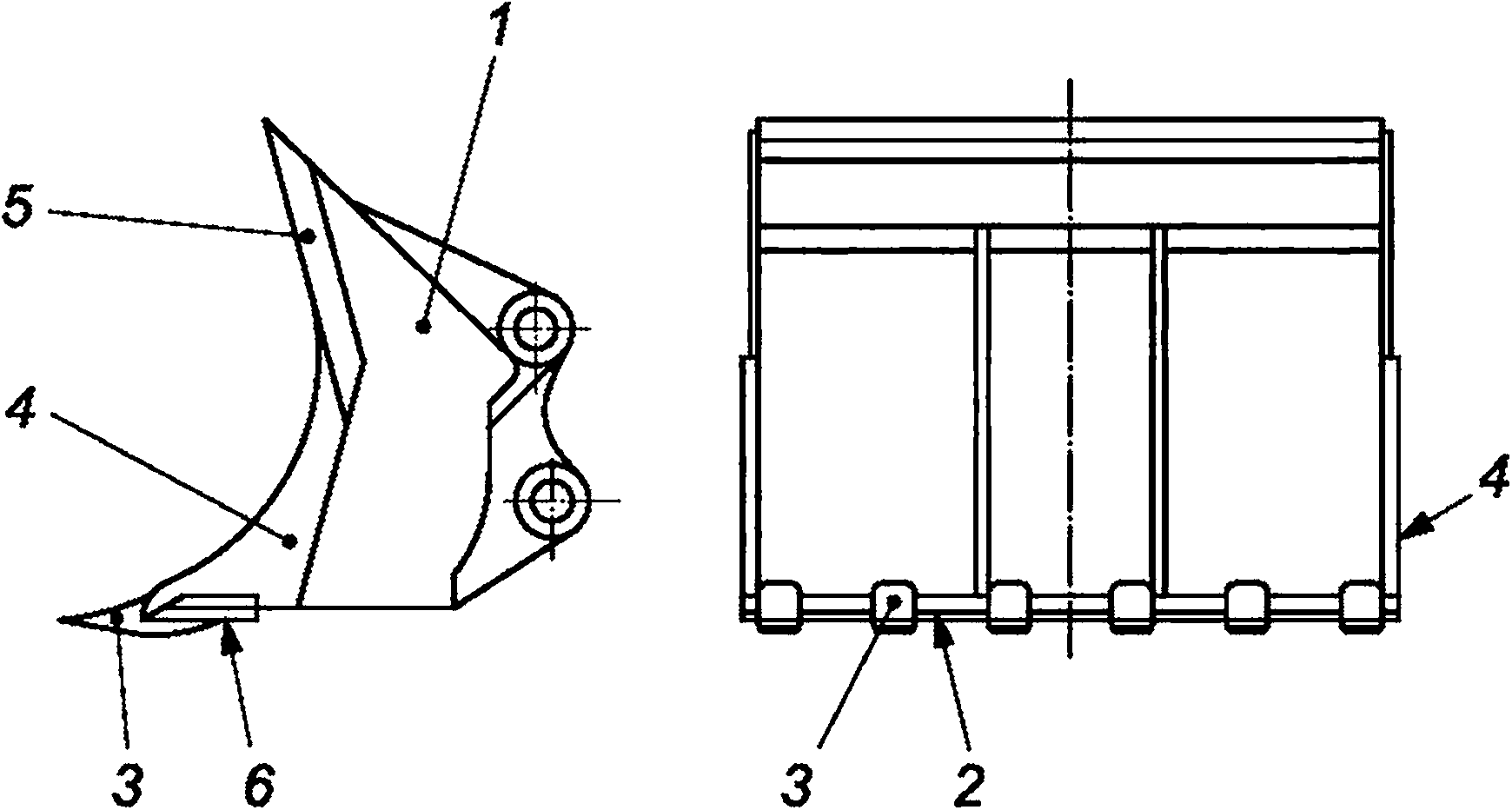
1 - корпус ковша; 2 - режущая кромка; 3 - зуб; 4 - боковой нож; 5 - режущая кромка боковой стенки; 6 - боковой зуб; 7 - крюк или серьга; 8 - переходник для зуба
Рисунок 12 - Ковш обратной лопаты
 |
1 - эжектор
Рисунок 13 - Дренажный (эжекторный) ковш
 |
1 - режущая кромка; 2 - зуб; 3 - нож экскаватора (сменный)
Рисунок 14 - Траншейный (кюветный) зачистной ковш
 |
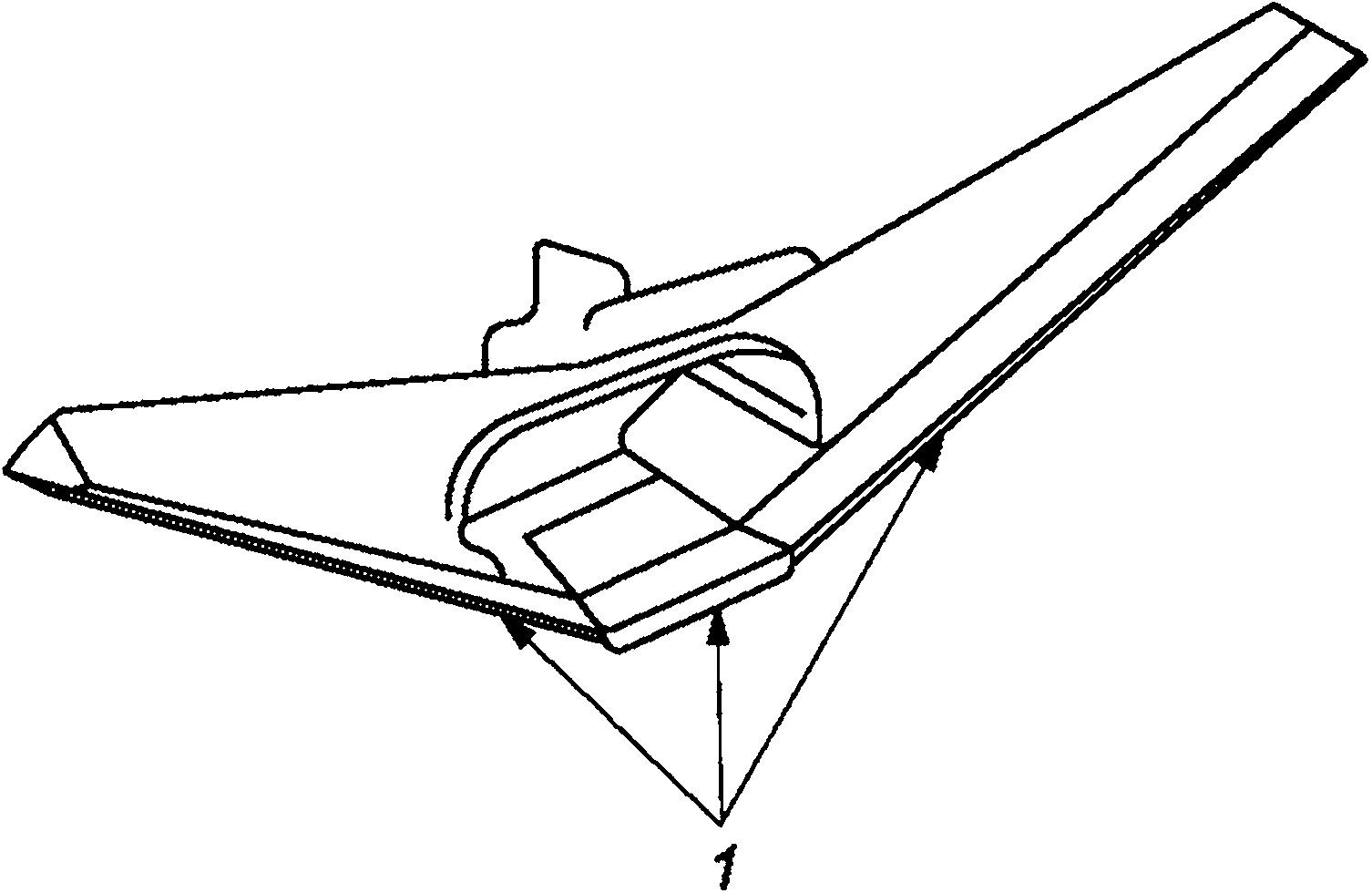
1 - режущая кромка
Рисунок 15 - Профилирующий ковш
 |
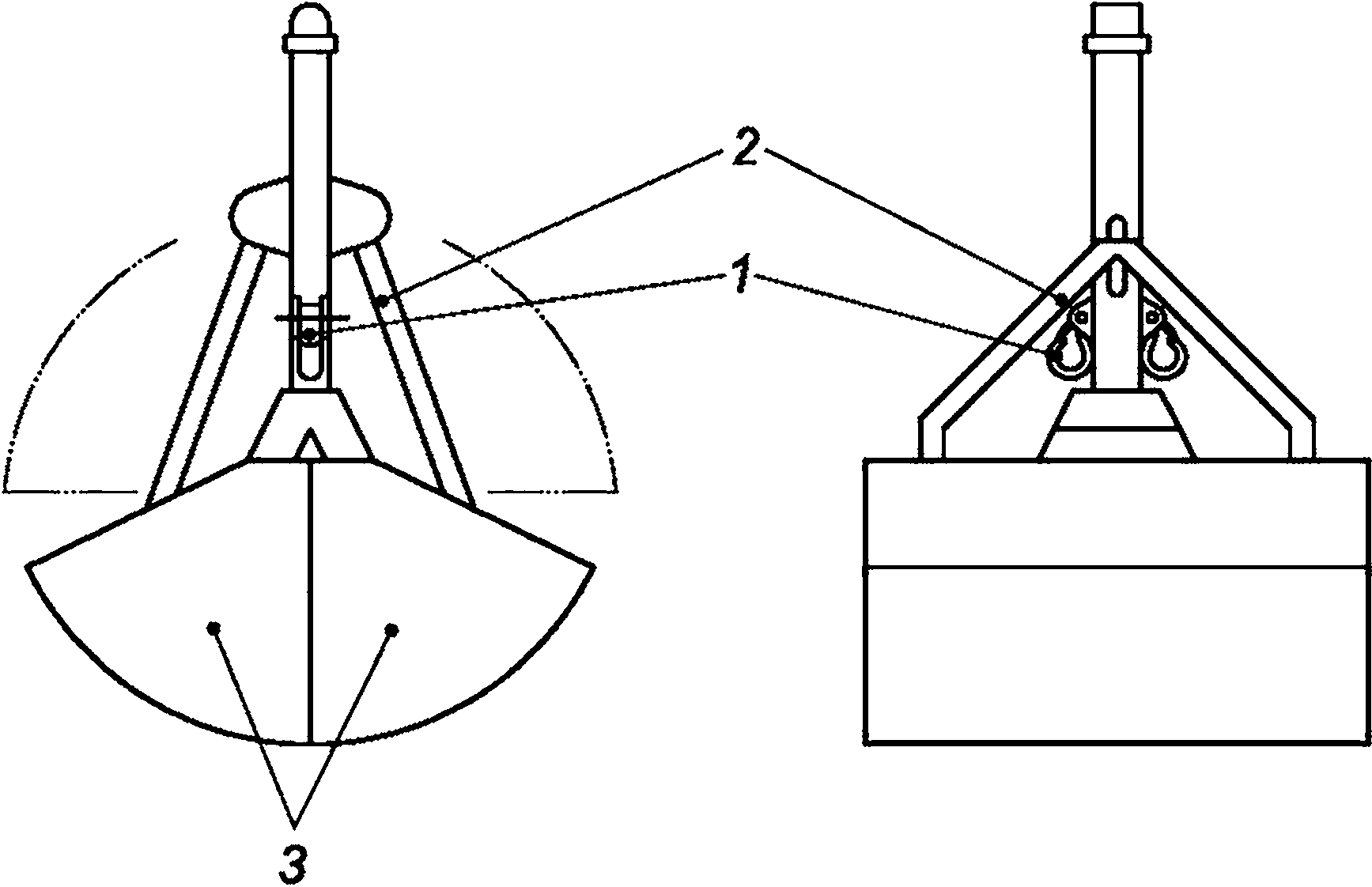
1 - крюк; 2 - створка; 3 - рычажная связь
Рисунок 16 - Двухчелюстной грейферный ковш
 |
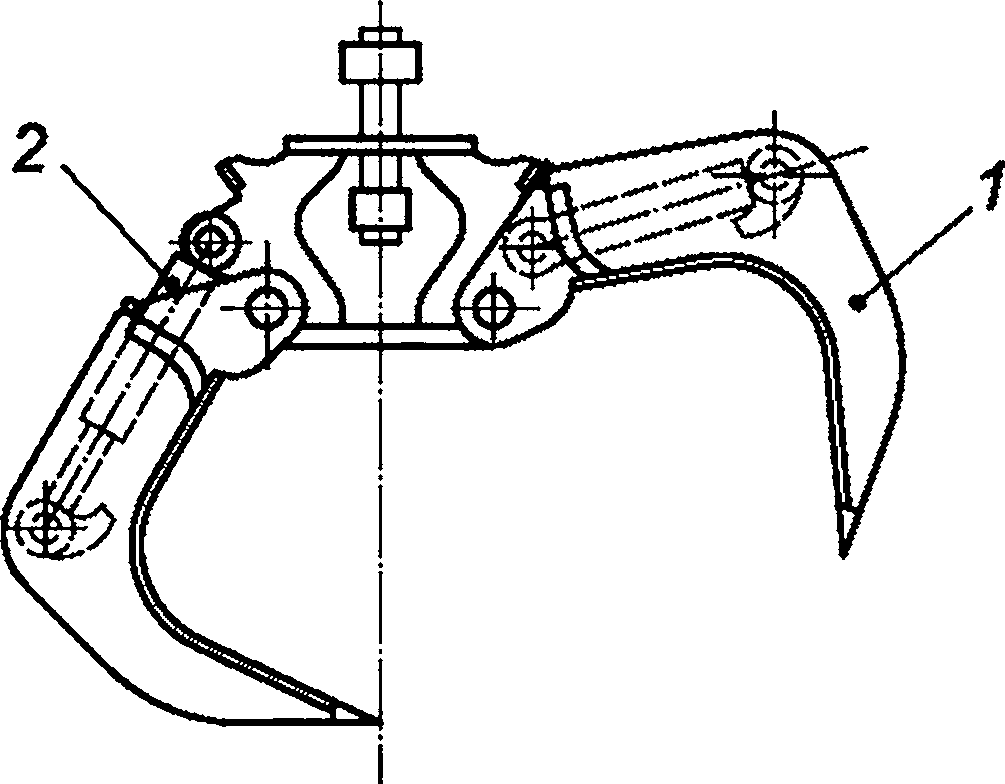
1 - рычаг; 2 - цилиндр рычага
Рисунок 17 - Многоцелевой клещевой захват
 |
1 - ось стрелы; 2 - стрела; 3 - цилиндр стрелы; 4 - ось рукояти; 5 - рукоять; 6 - цилиндр рукояти; 7 - ось ковша; 8 - ковш; 9 - цилиндр ковша; 10 - направляющая кулиса; 11 - тяга прямой лопаты
Рисунок 18 - Рабочее оборудование с ковшом прямой лопаты
 |
1 - ковш; 2 - режущая кромка; 3 - зуб; 4 - боковая режущая кромка; 5 - режущая кромка боковой стенки; 6 - держатель зуба
Рисунок 19 - Ковш прямой лопаты
 |
1 - ограждение от просыпания грунта; 2 - ось шарнира; 3 - ковш прямой лопаты в поднятом положении; 4 - ковш с прямой лопатой в заднем положении
Рисунок 20 - Ковш с откидным дном
 |
1 - ось стрелы; 2 - цилиндр стрелы; 3 - ковш; 4 - телескопическая стрела; 5 - цилиндр телескопа; 6 - цилиндр ковша; 7 - опора поворота стрелы
Рисунок 21 - Телескопическая стрела
 |
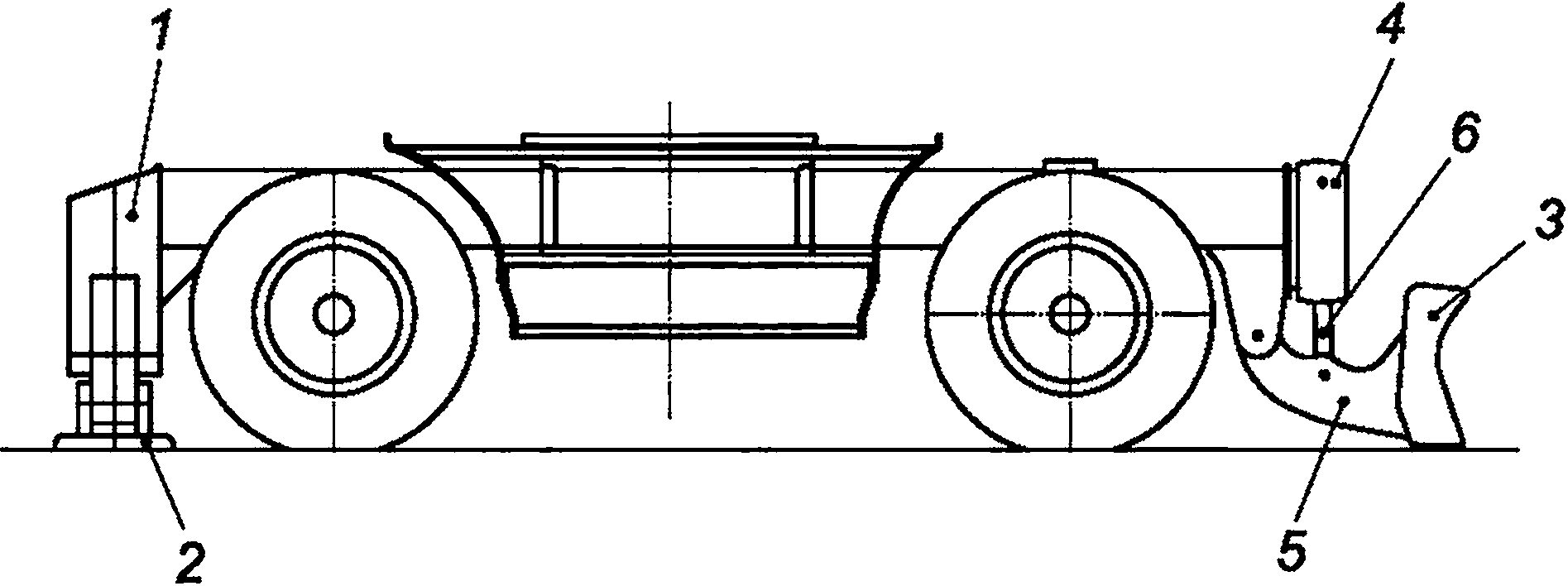
1 - задние аутригеры; 2 - опора аутригера; 3 - нож; 4 - подъемный цилиндр; 5 - толкающий брус; 6 - рычаг ножа
Рисунок 22 - Бульдозерное режущее оборудование и аутригенты
5.2 Размерные характеристики
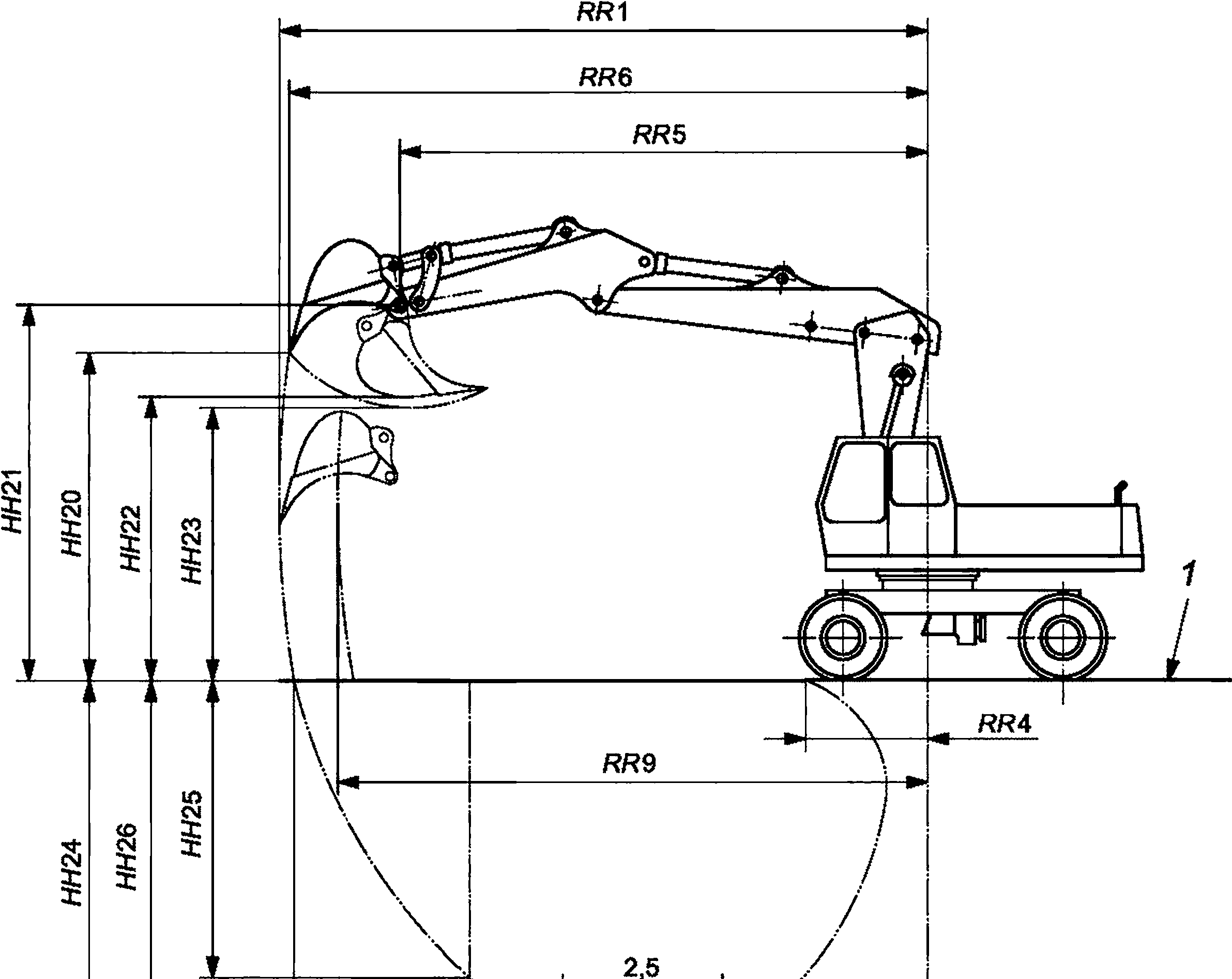
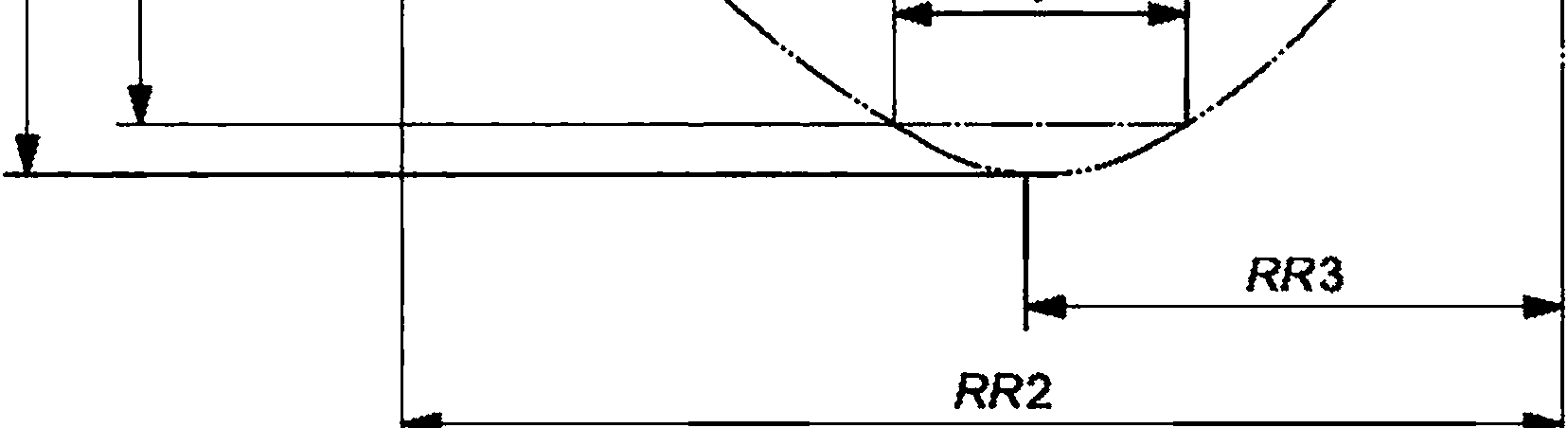
Размерные характеристики рабочего и сменного оборудования для гидравлических экскаваторов должны соответствовать рисункам 23-26.
Определения размерных характеристик см. в приложении В.
Размеры в метрах
 |
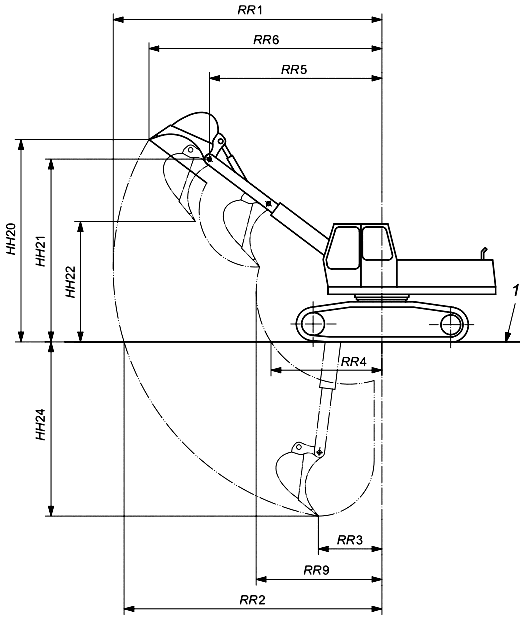
1 - опорная плоскость отсчета (GRP)
Рисунок 23 - Размерные характеристики рабочего оборудования с ковшом обратной лопаты
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 24 - Размерные характеристики рабочего оборудования с ковшом прямой лопаты
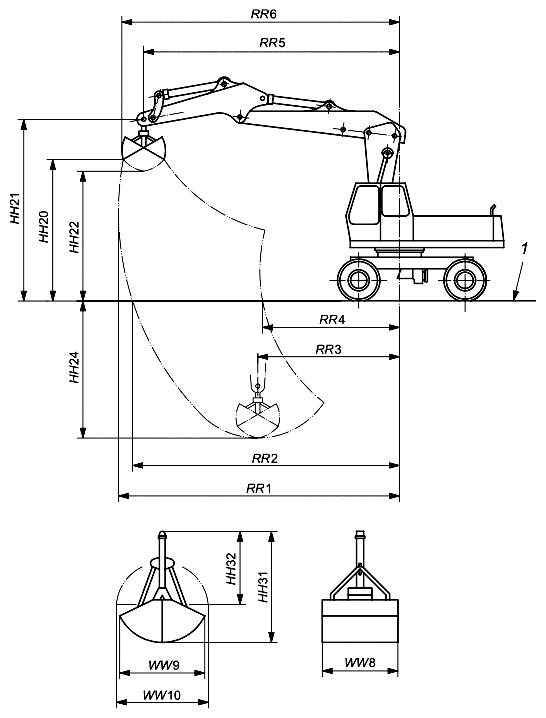 |
1 - опорная плоскость отсчета (GRP)
Рисунок 25 - Размерные характеристики рабочего оборудования с грейферным ковшом
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 26 - Размерные характеристики рабочего оборудования с телескопической стрелой
5.3 Маневрирование, движение и транспортирование
Размерные характеристики, связанные с маневрированием, движением и транспортированием гидравлических экскаваторов, должны соответствовать рисунками 27-30.
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 27 - Размерные характеристики колесного экскаватора в положении маневрирования
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 28 - Размерные характеристики колесного экскаватора в положении движения
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 29 - Размерные характеристики колесного экскаватора в транспортном положении
 |
1 - опорная плоскость отсчета (GRP)
Рисунок 30 - Размерные характеристики гусеничного экскаватора в транспортном положении
6 Определение технических характеристик
6.1 Полезная мощность
См. ISO 9249 и ISO 14396.
6.2 Максимальная скорость движения
Это максимальная скорость, полученная на твердой ровной поверхности с опорожненным ковшом и определенная согласно ISO 6014.
6.3 Максимальная частота вращения
Это максимальная частота вращения поворотной платформы и рабочего оборудования в оборотах в минуту.
6.4 Тормозные характеристики
Для колесных экскаваторов см. ISO 3450.
Для гусеничных экскаваторов см. ISO 10265.
6.5 Рулевое управление (только колесные экскаваторы)
См. ISO 5010.
6.6 Усилие копания
См. ISO 6015.
Максимальное вырывное усилие ковша обратной лопаты с использованием цилиндра ковша.
Максимальное вырывное усилие ковша обратной лопаты с использованием цилиндра рукояти.
Максимальное вырывное усилие ковша прямой лопаты с использованием цилиндра ковша.
Максимальное вырывное усилие ковша прямой лопаты с использованием цилиндра рукояти.
6.7 Номинальная грузоподъемность
См. ISO 10567.
7 Технические характеристики для коммерческой документации
7.1 Двигатель
Необходимо указать следующее:
a) тип зажигания, т.е. с воспламенением от сжатия или искровым зажиганием;
b) тактность, т.е. двухтактный или четырехтактный;
c) способ подачи воздуха, т.е. с естественным всасыванием, с механическим наддувом или газотурбонаддувом;
d) число цилиндров;
e) диаметр цилиндра;
f) ход цилиндра;
g) рабочий объем;
h) полезная мощность ISO на маховике при заданных частотах вращения двигателя;
i) максимальный крутящий момент при заданных частотах вращения двигателя в минуту.
Далее представлены примеры прочих данных, связанных с двигателем, которые могут быть указаны:
- изготовитель или модель;
- система охлаждения, т.е. охлаждение водой или воздухом;
- тип топлива;
- тип стартера;
- напряжение электрической системы.
7.2 Гидравлическая система
Необходимо указать следующее:
a) подача насоса при заданном давлении и заданных оборотах двигателя;
b) максимальное нормальное рабочее давление системы.
Прочая информация может быть указана при желании.
7.3 Заправочные емкости для рабочих жидкостей
Необходимо указать емкости:
a) топливного бака;
b) гидравлической системы.
Далее представлены примеры прочих соответствующих данных, которые могут быть указаны:
- гидробака;
- системы охлаждения;
- картера двигателя;
- конечных передач;
- насосов привода хода;
- картера системы поворота платформы.
7.4 Система фильтрации
Может быть указан тип фильтрационной системы.
7.5 Гусеничный экскаватор
7.5.1 Рулевое управление и торможение
Необходимо указать тип и приведение в действие рулевого управления и тормозной системы.
Пример - Барабанный или дисковый; в масляной ванне или сухой; гидравлический или механический.
7.5.2 Конечная передача
Может быть указан тип конечной передачи и соответствующая информация.
Пример - Одноступенчатая или двухступенчатая; планетарная; передаточное число; смазка.
7.5.3 Гусеничный движитель
Необходимо указать следующее:
a) тип;
b) размерные характеристики.
Далее представлены примеры прочих соответствующих данных, которые могут быть указаны:
- площадь контакта с землей (определяется расчетным методом);
- число башмаков (с каждой стороны);
- число поддерживающих катков (с каждой стороны);
- количество опорных катков (с каждой стороны).
7.6 Колесный экскаватор
7.6.1 Ведущий мост
Может быть указан тип ведущего моста.
Пример - Без подвески; коническая главная передача; дифференциальный; двухскоростной; гидростатический; с планетарной конечной передачей.
7.6.2 Рулевое управление
Указать тип рулевого управления.
Далее представлены примеры прочих данных, которые могут быть указаны:
- радиус поворота (левый и правый);
- угол складывания шарнирно-сочлененной рамы;
- габаритный диаметр машины.
7.6.3 Тормоза
Далее представлена информация, которая может быть указана:
- тип и приводная система рабочего тормоза;
- тип и приводная система ручного тормоза;
- тип и приводная система вспомогательных тормозов;
- эксплуатационные характеристики тормоза.
7.6.4 Шины
Необходимо указать размер и тип шин.
Далее представлены примеры прочих данных, которые могут быть указаны:
- тип;
- норма слойности;
- размер обода.
7.7 Эксплуатационная масса
Необходимо указать эксплуатационную массу.
7.8 Отгрузочная масса
Необходимо указать отгрузочную массу.
Приложение A
(обязательное)
Размерные характеристики базовой машины
В настоящем приложении приведены определения высоты, ширины, длины, радиусные и угловые размерные характеристики экскаваторов. См. также рисунок 5.
Таблица А.1
Условное обозначение | Термин и определение | Рисунок |
Н24 | высота кабины (cab height): Расстояние по координатной оси Z между платформой поворотной части и самой высшей точкой кабины |  |
Н25 | высота гусеничного движителя (crawler track height): Расстояние по координатной оси Z между GRP (1) и самой высшей точкой гусеничного движителя |  |
Н26 | высота зазора под верхней конструкцией (clearance height under upper structure): Расстояние по координатной оси Z между GRP (1) и нижней точкой поворотной платформы |  |
W16 | габаритная ширина шасси (undercarriage overall width): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные точки на сторонах шасси |  |
W17 | габаритная ширина поворотной платформы (upper structure overall width): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через крайние точки на сторонах поворотной платформы |  |
W18 | расстояние от оси вращения поворотной платформы до правой стороны (right-side upper structure distance from axis of rotation): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими соответственно через ось вращения и крайнюю правую боковую точку поворотной платформы |  |
W19 | габаритная ширина кабины (cab width overall): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные боковые точки с каждой стороны кабины |  |
W20 | максимальная ширина, с узкими или широкими гусеницами (maximum width with track extended or retracted): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные точки гусеничного движителя, - для широких гусениц, или расстояние по координатной оси Y между двумя плоскостями Y, проходящими через наружные поверхности гусеничного движителя, - для узких гусениц |  |
W21 | размер колеи, с узкими или широкими гусеницами (track gauge with track extended or retracted): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через середины зубьев ведущих колес |  |
L14 | габаритная длина гусеничного движителя (crawler overall length): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через крайние точки на передней и задней части гусеничного движителя |  |
L15 | Расстояние от оси вращения до оси ведущего колеса (sprocket axis to axis of rotations): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через ось ведущего колеса и ось вращения |  |
L16 | Вылет поворотной платформы от оси вращения (upper structure rearmost distance from axis of rotation): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через крайнюю заднюю точку поворотной платформы и ось вращения |  |
L17 | габаритная длина шасси (undercarriage overall length): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через крайние точки на передней и задней части шасси |  |
L18 | Расстояние от заднего колеса до оси вращения (rear axle to axis of rotation): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через центр заднего колеса и ось вращения |  |
L19 | габаритная длина кабины (cab overall length): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через крайние точки на передней и задней части кабины |  |
R4 | радиус поворота (задней части) (swing radius, rear-end radius): Расстояние по координатной оси Y (плоскость Z) между осью вращения и крайней задней точкой поворотной платформы |  |
Координаты Х, Y и Z, а также плоскости Х, Y и Z включают трехмерную систему координат, используемую для определения размерных характеристик землеройных машин в соответствии с ISO 6746-1; опорная плоскость отсчета (GRP), указанная на рисунках цифрой "1", также определяется настоящим стандартом. | ||
Приложение В
(обязательное)
Размерные характеристики сменного и рабочего оборудования
В настоящем приложении определяется высота, ширина, длина, радиусная и угловая размерные характеристики, а также радиус действия сменного и рабочего оборудования, используемого на гидравлических экскаваторах. См. также рисунки 23-30.
Таблица В.1
Условное обозначение | Термин и определение | Рисунок |
НН20 | максимальная высота режущей кромки (maximum height of cutting edge): Расстояние по координатной оси Z между GRP (1) и режущей кромкой в наивысшей точке, которую можно достичь |  |
НН21 | максимальная высота шарнира ковша (maximum bucket hinge pin height): Расстояние по координатной оси Z между GRP (1) и шарниром ковша на самой высокой точке, которую можно достичь |  |
НН22 | Максимальная погрузочная высота ковша (захвата) (maximum bucket [grab] loading clearance): Расстояние по координатной оси Z между GRP (1) и самой нижней точкой ковша (захвата) в закрытом положении, когда шарнир ковша находится в наивысшем положении |  |
НН23 | максимальная высота разгрузки (maximum dumping height): Расстояние по координатной оси Z между GRP (1) и самой нижней достижимой точкой ковша, когда шарнир ковша находится в наивысшем положении |  |
НН24 | максимальная глубина копания (maximum digging depth): Расстояние по координатной оси Z между GRP (1) и режущей кромкой в самой нижней точке, которую можно достичь |  |
НН25 | максимальная вертикальная глубина копания (maximum vertical digging depth): Расстояние по координатной оси Z между GRP (1) и режущей кромкой в самой глубокой точке, которую можно достичь вертикально |  |
НН26 | максимальная глубина копания при длине плоской площадки 2,5 м (maximum digging depth at 2,5 m floor length): Расстояние по координатной оси Z между GRP (1) и режущей кромкой в самой нижней точке копания, которая позволяет сделать площадку длиной 2,5 м, параллельную координате Х |  |
НН27 | максимальная высота разгрузки для экскаватора с ковшом прямой лопаты (maximum dumping height for shovel): Расстояние по координатной оси Z между GRP (1) и режущей кромкой в самой высшей точке, которую можно достичь при угле разгрузки 45° | 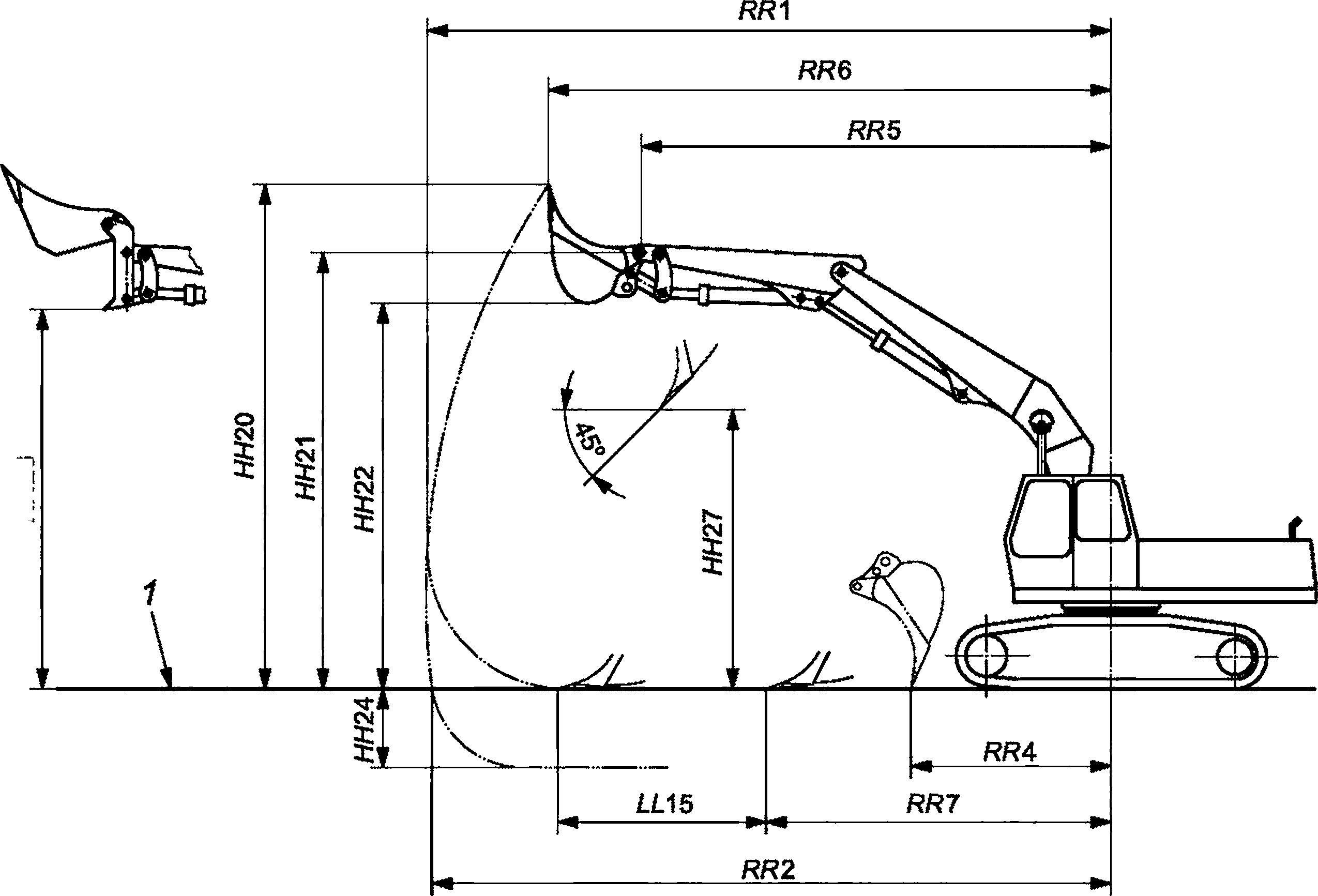 |
НН28 | габаритная высота в положении маневрирования (overall height in manoeuvring position): Расстояние по координатной оси Z между GRP (1) и самой высокой точкой рабочего оборудования в положении маневрирования |  |
НН29 | габаритная высота рабочего оборудования при транспортном положении (overall equipment height in transport position): Расстояние по координатной оси Z между GRP (1) и самой высокой точкой рабочего оборудования при транспортировании |  |
НН30 | габаритная высота в положении при движении (overall height in travelling condition): Расстояние по координатной оси Z между GRP (1) и наивысшей точкой машины во время движения |  |
НН31 | высота закрытого захвата (height of closed grab): Расстояние по координатной оси Z между двумя плоскостями Z, проходящими соответственно через шарнир захвата и самую нижнюю точку захвата в закрытом положении |  |
НН32 | высота открытого захвата (height of open grab): Расстояние по координатной оси Z между двумя плоскостями Z, проходящими соответственно через шарнир захвата и самую нижнюю точку захвата в открытом положении |  |
LL8 | габаритная длина при транспортном положении (overall length in transport position): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через крайние точки на передней и задней части машины во время транспортирования |  |
LL9 | габаритная длина в положении маневрирования (overall length in manoeuvring position): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через крайние точки на передней и задней части машины во время маневрирования |  |
LL10 | габаритная длина в положении при движении (overall length in travelling condition): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через крайние точки на передней и задней части машины во время движения |  |
LL11 | расстояние спереди до оси вращения (front distance to axis of rotation): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими через ось вращения и самую удаленную точку на передней части машины, включая оборудование, во время движения |  |
LL12 | расстояние спереди до оси управляемого колеса (front distance to steering wheel centre): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через ось управляемого колеса и самую удаленную точку на передней части машины, включая рабочее оборудование, во время движения |  |
LL13 | вылет опоры относительно передней оси (front pad centre to front axle): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через центр передней оси и ось опор передних аутригеров |  |
LL14 | Вылет опоры относительно задней оси (rear pad centre to rear axle): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через центр задней оси и ось опор задних аутригеров |  |
LL15 | длина горизонтального резания (length of level floor cut): Расстояние по координатной оси Х на GRP (1), которое может быть создано режущей кромкой ковша прямой лопаты |  |
LL16 | расстояние спереди до оси вращения при транспортировании (front distance to axis of rotation in transport position): Расстояние по координатной оси Х между двумя плоскостями Х, проходящими соответственно через самую удаленную точку рабочего оборудования ковша обратной лопаты при транспортировании и осью вращения |  |
RR1 | максимальный вылет (maximum reach): Расстояние по координатной оси Х (плоскость Z) между осью вращения и самой удаленной точкой режущей кромки с рабочим оборудованием, установленным на максимальную досягаемость |  |
RR2 | максимальный вылет на GRP (maximum reach at GRP): Расстояние по координатной оси Х (плоскость Z) между осью вращения и самой удаленной точкой режущей кромки, установленной на GRP (1), с рабочим оборудованием, установленным на максимальную досягаемость |  |
RR3 | вылет при максимальной глубине копания (reach at maxmum digging depth): Расстояние по координатной оси Х (плоскость Z) между осью вращения и точкой, где достигнута максимальная глубина копания (НН24) |  |
RR4 | минимальный вылет на GRP (minimum reach at GRP): Расстояние по координатной оси Х (плоскость Z) между осью вращения и ближайшей к оси ковша точкой режущей кромки, расположенной на GRP (1) |  |
RR5 | Вылет по оси шарнира ковша при минимальной высоте (reach to bucket pin centre at minimum height): Расстояние по координатной оси Х (плоскость Z) между осью вращения и центром шарнира ковша с рабочим оборудованием, поднятым на максимальную высоту |  |
RR6 | Вылет при максимальной высоте (reach at maximum height): Расстояние по координатной оси Х (плоскость Z) между осью вращения и режущей кромкой при максимальной высоте |  |
RR7 | минимальный радиус горизонтального резания (minimum level floor radius): Расстояние по координатной оси Х (плоскость Z) между осью вращения и режущей кромкой, установленной на GRP (1), в ближнем к машине положении и пригодном для создания горизонтальной площадки (LL15) |  |
RR8 | наружный радиус машины (outside machine clearance radius): Расстояние по координатной оси Х (плоскость Z) между центром поворота и самой удаленной точкой машины, включая рабочее оборудование, во время движения, при выполнении самого крутого практически возможного поворота |  |
RR9 | минимальный вылет (minimum reach): Расстояние по координатной оси Х (плоскость Z) между осью вращения и ближайшей точкой режущей кромки с рабочим оборудованием, убранным до минимального положения |  |
WW8 | наружная ширина захвата (outside width of grab): Расстояние между наиболее удаленными точками сторон захвата |  |
WW9 | ширина закрытого захвата (width of closed grab): Расстояние на плоскости Z между самыми удаленными точками закрытого захвата |  |
WW10 | ширина раскрытого захвата (width of open grab): Расстояние на плоскости Z между самыми удаленными точками режущих кромок открытого захвата |  |
WW11 | ширина по осям опорных площадок аутригеров или выдвинутых выносных опор (width of pad centers outrigger or stabilizer extended): Расстояние по координате Y между двумя плоскостями Y, проходящими через оси опорных площадок |  |
WW12 | габаритная ширина, включая аутригеры и опорные площадки (overall width including outriggers and supporting plates): Расстояние на плоскости Y между двумя плоскостями Y, проходящими через самые удаленные точки на обеих сторонах аутригеров и опорных площадок |  |
WW13 | габаритная ширина, включая аутригеры в положении движения по дорогам общего пользования (overall width including outriggers at road travelling position): Расстояние на плоскости Y между двумя плоскостями Y, проходящими через самые удаленные точки на обеих сторонах аутригеров в положении движения по дорогам общего пользования. |  |
Координаты Х, Y и Z, а также плоскости Х, Y и Z включают трехмерную систему координат, используемую для определения размерных характеристик оборудования и приспособлений для землеройных машин в соответствии с ISO 6746-2; опорная плоскость отсчета (GRP), обозначенная на рисунках цифрой "1", также определяется в настоящем стандарте. | ||
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 3450:2011 | - | * |
ISO 5010:2007 | IDT | ГОСТ ISO 5010-2011 "Машины землеройные. Системы рулевого управления колесных машин" |
ISO 6014:1986 | - | * |
ISO 6015:2006 | - | * |
ISO 6165:2006 | - | * |
ISO 6746-1:2003 | MOD | ГОСТ 28633-90 (ИСО 6746-1-87) "Машины землеройные. Определения и условные обозначения размерных характеристик. Часть 1. Базовая машина" |
ISO 6746-2:2003 | MOD | ГОСТ 28632-90 (ИСО 6746-2-87) "Машины землеройные. Определения и условные обозначения размерных характеристик. Часть 2. Рабочее оборудование" |
ISO 9249:2007 | MOD | ГОСТ 30687-2000 (ИСО 9249-97) "Машины землеройные. Правила испытаний двигателей. Полезная мощность" |
ISO 10265:2008 | IDT | ГОСТ ISO 10265-2013 "Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем" |
ISO 10567-2007 | - | * |
ISO 14396:2002 | IDT | ГОСТ ISO 14396-2015 "Двигатели внутреннего сгорания поршневые. Определение и метод измерения мощности двигателя. Дополнительные требования при измерении выбросов продуктов сгорания согласно ISO 8178" |
* Соответствующий межгосударственный стандарт отсутствует. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. | ||
Библиография
[1] | ISO 5353:1995 | Earth-moving machinery, and tractors and machinery for agriculture and forestry - Seat index point (Машины землеройные, тракторы и машины для сельскохозяйственных работ и лесоводства. Контрольная точка сиденья) |
[2] | ISO 6016:2008 | Earth-moving machinery - Methods of measuring the masses of whole machines, their equipment and components (Машины землеройные. Методы измерений масс машин в целом, рабочего оборудования и составных частей) |
УДК 621.879-82:001.4(083.74)(476) | МКС 01.040.53; 53.100 | IDT |
Ключевые слова: машины землеройные, гидравлический экскаватор, рабочее оборудование, сменное оборудование, техническая характеристика | ||
{kind=link}