ГОСТ Р 60.3.0.2-2020/
ИСО 14539:2000
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РОБОТЫ ПРОМЫШЛЕННЫЕ МАНИПУЛЯЦИОННЫЕ
Перемещение объектов с помощью захватного устройства зажимного типа. Термины, определения и представление характеристик
Robots and robotic devices. Industrial manipulating robots. Object handling with grasp-type grippers. Terms, definitions and presentation of characteristics
ОКС 01.040.25
25.040.30
Дата введения 2021-03-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) совместно с Обществом с ограниченной ответственностью "Открытая Робототехника" (ООО "Открытая Робототехника") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 10 ноября 2020 г. N 1035-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 14539:2000* "Промышленные манипуляционные роботы. Перемещение объектов с помощью захватного устройства зажимного типа. Словарь и представление характеристик" (ISO 14539:2000 "Manipulating industrial robots - Object handling with grasp-type grippers - Vocabulary and presentation of characteristics", IDT).
______________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА.
Дополнительные сноски в тексте стандарта, выделенные курсивом, приведены для пояснения текста оригинала
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на промышленных манипуляционных роботов. Он идентичен международному стандарту ИСО 14539, разработанному подкомитетом (ПК) 2 "Роботы для производственной среды" Технического комитета (ТК) 184 ИСО "Системы автоматизации производства и их интеграция".
Примечание - С 1 января 2016 года ИСО/ТК 184/ПК 2 преобразован в ИСО/ТК 299 "Робототехника".
Настоящий стандарт определяет термины, необходимые для понимания и планирования взятия и перемещения объектов с помощью роботов, рабочие органы которых представляют собой захватные устройства зажимного типа. Успешное манипулирование объектами достигается за счет совместной работы промышленного робота и его рабочего органа. Промышленный робот обеспечивает позиционирование объекта, а рабочий орган - взятие и размещение объекта. Кроме того, рабочий орган, оснащенный адаптивно управляемыми пальцами может обеспечивать работу с нежесткими и хрупкими объектами.
Установленные в настоящем стандарте термины расположены в систематизированном порядке, отражающем систему понятий данной области знания.
Для каждого понятия установлен один стандартизованный термин.
Термины-синонимы без пометы "Нрк" приведены в качестве справочных данных и не являются стандартизованными.
Заключенная в круглые скобки часть термина может быть опущена при использовании термина в документах по стандартизации.
В алфавитном указателе данные термины приведены отдельно с указанием номера статьи.
В стандарте приведены иноязычные эквиваленты стандартизованных терминов на английском языке.
Стандартизованные термины набраны полужирным шрифтом, их краткие формы, представленные аббревиатурой, - светлым, синонимы - курсивом.
1 Область применения
Настоящий стандарт определяет термины, применяемые в отношении функциональных возможностей рабочих органов промышленных манипуляционных роботов, представляющих собой захватные устройства зажимного типа, соответствующие определению 4.1.2.1. Настоящий стандарт устанавливает термины для описания работы с объектами и термины, относящиеся к функциям, конструкциям и компонентам захватных устройств зажимного типа.
Приложение А является справочным и содержит рекомендуемые формы представления характеристик захватных устройств зажимного типа, которые могут быть использованы:
a) изготовителями рабочих органов для представления характеристик своей продукции потребителям;
b) потребителями роботов для представления требований к рабочим органам, которые им необходимы;
c) потребителями роботов для описания характеристик объектов, с которыми предстоит работать роботам.
Настоящий стандарт применим также к простым системам манипулирования с объектами, которые не подпадают под определение промышленных манипуляционных роботов, таким как загрузочно-разгрузочные или копирующие устройства.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения):
ISO 8373:1994, Manipulating industrial robots - Vocabulary (Промышленные манипуляционные роботы - Словарь)
_______________
Действует ИСО 8373:2012. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
ISO 9409-1:1996![]() , Manipulating industrial robots - Mechanical Interfaces - Part 1: Plates (form A) [Промышленные манипуляционные роботы. Механические интерфейсы. Часть 1. Круглые фланцы (форма А)]
, Manipulating industrial robots - Mechanical Interfaces - Part 1: Plates (form A) [Промышленные манипуляционные роботы. Механические интерфейсы. Часть 1. Круглые фланцы (форма А)]
_______________
![]() Действует ИСО 9409-1:2004. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
Действует ИСО 9409-1:2004. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
ISO 9409-2:1996, Manipulating industrial robots - Mechanical Interfaces - Part 2: Shafts (form A) [Промышленные манипуляционные роботы. Механические интерфейсы. Часть 2. Стержни (форма А)]
_______________
Действует ИСО 9409-2:2002. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
ISO 9787:1999![]() , Manipulating industrial robots - Coordinate systems and motion nomenclatures (Промышленные манипуляционные роботы. Системы координат и типы перемещений)
, Manipulating industrial robots - Coordinate systems and motion nomenclatures (Промышленные манипуляционные роботы. Системы координат и типы перемещений)
_______________
![]() Действует ИСО 9787:2013. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
Действует ИСО 9787:2013. Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
3 Термины и определения по работе с объектами
В настоящем стандарте применены термины по ИСО 8373, а также следующие термины с соответствующими определениями.
3.1 Типы манипулирования
3.1.1 объект (манипулирования) (object): Твердое (нежидкое) тело, захватываемое, удерживаемое или перемещаемое рабочим органом при работе робота.
Примечание - Объект может иметь разные формы и размеры и может быть деформирован во время работы с ним.
3.1.2 манипулирование объектом (object handling): Действие, оказываемое на объект рабочим органом, или поддержание текущего состояния объекта с помощью рабочего органа.
3.1.3 удержание (объекта) (grip): Ограничения, налагаемые на объект рабочим органом.
3.1.4 захват (объекта) (grasp): Ограничения, налагаемые на объект пальцеобразными механизмами (пальцами) захватного устройства.
3.1.5 захватывание (grasping): Движение захватного устройства с целью наложения ограничений на объект с помощью пальцеобразных механизмов (пальцев).
3.1.6 отпускание (releasing): Движение захватного устройства с целью устранения ограничений, наложенных на объект.
3.1.7 состояние (объекта) (state): Положение ограничений, наложенных на объект, и результирующее пространственное расположение объекта (см. рисунок 1).
3.1.8 действие (action): Преобразование состояния объекта (см. рисунок 1).
Примечание - Некоторые действия осуществляют преобразование между разными типами состояний, в то время как другие действия осуществляют преобразование состояний одного типа.
|
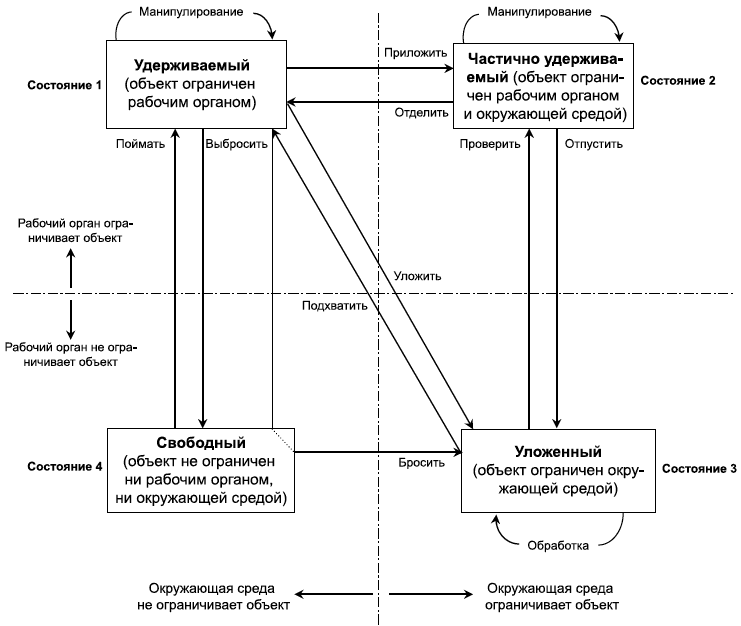
Примечание - Названия действий приведены только для информации.
Рисунок 1 - Состояния и действия при обращении с объектом
3.1.9 типы состояния объекта
3.1.9.1 удерживаемый (состояние 1) [gripped (state 1)]: Состояние, при котором объект ограничен рабочим органом, но не окружающей средой.
3.1.9.2 частично удерживаемый (состояние 2) [semi-gripped (state 2)]: Состояние, при котором объект ограничен рабочим органом и окружающей средой.
3.1.9.3 уложенный (состояние 3) [laid (state 3)]: Состояние, при котором объект ограничен окружающей средой, но не рабочим органом.
3.1.9.4 свободный (состояние 4) [free (state 4)]: Состояние, при котором объект не ограничен ни рабочим органом, ни окружающей средой.
Примечание - Ограничения со стороны консервативных сил, таких как гравитация, не рассматривают как часть ограничений окружающей среды. Ограничения со стороны консервативных сил, если таковые имеются, не имеют отношения к определениям типов состояния объекта.
3.2 Захват объекта
3.2.1 типы захвата
3.2.1.1 степени свободы захваченного объекта (degrees of freedom of grasped object): Степени свободы движения объекта в пространстве при его ограничении пальцами с учетом или без учета сил трения в точках контакта.
Примечание - Данное определение предполагает, что захватное устройство не движется. Для случаев, когда захватное устройство движется, см. 4.3.3.
3.2.1.2 захват по форме (form closure grasp): Захват, при котором объект не имеет степеней свободы без учета сил трения в точках контакта.
Примечание - При захвате по форме только конфигурация захватного устройства определяет пространственное расположение объекта.
3.2.1.3 захват по усилию (force closure grasp): Захват, при котором объект имеет не менее одной степени свободы без учета сил трения в точках контакта, но не имеет степеней свободы с их учетом.
Примечание - При захвате по усилию не только конфигурация захватного устройства, но и действующие силы обеспечивают поддержание пространственного расположения объекта. Такими силами обычно являются силы трения.
3.2.1.4 захват с внешней стороны (внешний захват) [external grasp (outside grasp)]: Захват, который воздействует на внешнюю поверхность объекта. См. рисунки 2 а)-d), f), g).
3.2.1.5 захват с внутренней стороны (внутренний захват) [internal grasp (inside grasp)]: Захват, который воздействует на внутреннюю поверхность объекта. См. рисунок 2 е).
|
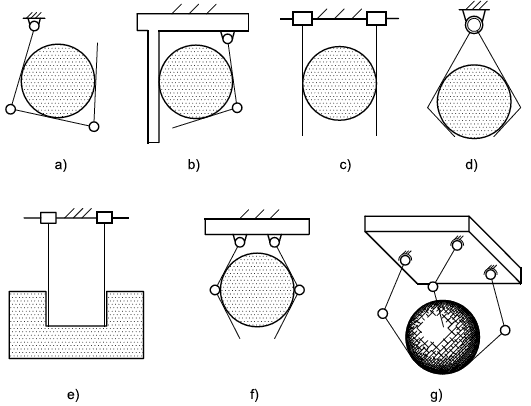
a), b) - захватное устройство с одним пальцем; c), d), e), f) - захватное устройство с двумя пальцами; g) - захватное устройство с несколькими пальцами
Рисунок 2 - Типичные виды захвата захватным устройством зажимного типа
3.2.2 силы, действующие при захвате
Примечание - Все силы, действующие при захвате объекта, рассматривают как динамические силы, которые включают в себя статические компоненты. Эти силы могут быть увеличены или уменьшены за счет внешних сил и/или ускорений.
3.2.2.1 контактная сила (contact force): Сила, приложенная от пальца к объекту через точку контакта, линию контакта или плоскость контакта.
Примечание 1 - См. ![]() или
или ![]() , на рисунке 3.
, на рисунке 3.
Примечание 2 - К контактным силам, в частности, относят силы трения, а также нормальные силы.
3.2.2.2 сила манипулирования (manipulating force): Векторная сумма всех контактных сил, приложенных от пальцев к объекту, с обратным знаком.
Примечание - См. ![]() на рисунке 3 а).
на рисунке 3 а).
3.2.2.3 сила удерживания (gripping force): Величина контактной силы, определенная только для захвата без проскальзывания с двумя контактными точками при условии, что результирующая сил и моментов, воздействующих на объект помимо контактных сил, равна нулю.
Примечание 1 - Величина ![]() на рисунке 3 b) представляет силу удерживания.
на рисунке 3 b) представляет силу удерживания.
Примечание 2 - К силам и моментам, воздействующим на объект помимо контактных сил, относят внешние, гравитационные и инерционные силы и моменты, а также моменты, воздействующие через точки контакта. При этом величина ![]() равна величине
равна величине ![]() .
.
|
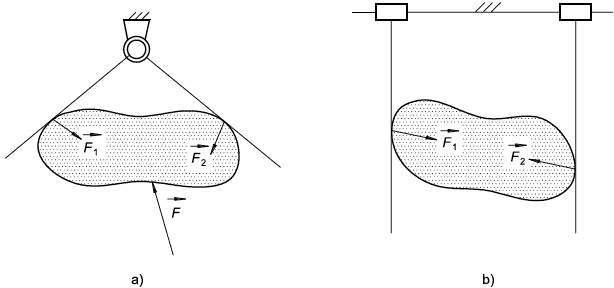
Рисунок 3 - Силы, действующие при сжатии
3.2.3 устойчивый захват
3.2.3.1 устойчивость захвата (1) [grasp stability (1)]: Способность объекта восстанавливать свое первоначальное пространственное расположение в захватном устройстве после того, как его положение немного изменилось в результате приложенных к нему возмущающих сил.
________________
При наличии проскальзывания.
3.2.3.2 устойчивость захвата (2![]() ) [grasp stability (2)]: Способность пальцев захватного устройства постоянно находиться в контакте с удерживаемым объектом без проскальзывания, когда объект подвергается воздействию возмущающих сил.
) [grasp stability (2)]: Способность пальцев захватного устройства постоянно находиться в контакте с удерживаемым объектом без проскальзывания, когда объект подвергается воздействию возмущающих сил.
_______________
![]() При отсутствии проскальзывания.
При отсутствии проскальзывания.
3.3 Системы координат при манипулировании объектами
См. рисунок 4.
Примечание - Данные системы координат используют при программировании заданий роботу для описания положения и ориентации объектов манипулирования в цепочке систем координат.
3.3.1 глобальная система координат (world coordinate system): Стационарная система координат, привязанная к земле, которая не зависит от движения робота, обозначаемая как ![]() по ИСО 8373 и ИСО 9787.
по ИСО 8373 и ИСО 9787.
|
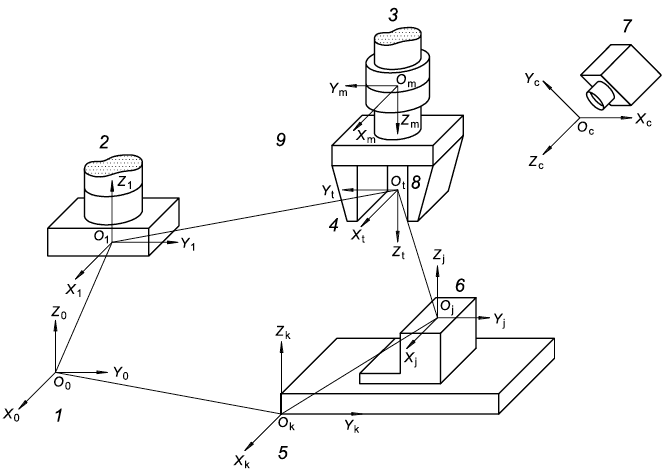
1 - глобальная система координат; 2 - система координат основания; 3 - система координат механического интерфейса; 4 - система координат инструмента; 5 - система координат задания; 6 - система координат объекта; 7 - система координат камеры; 8 - ЦТИ; 9 - захватное устройство
Рисунок 4 - Системы координат при манипулировании объектами
3.3.2 система координат основания (base coordinate system): Система координат, привязанная к установочной поверхности основания, обозначаемая как ![]() по ИСО 8373 и ИСО 9787.
по ИСО 8373 и ИСО 9787.
3.3.3 система координат механического интерфейса (mechanical interface coordinate system): Система координат, привязанная к механическому интерфейсу, обозначаемая как ![]() по ИСО 8373 и ИСО 9787.
по ИСО 8373 и ИСО 9787.
3.3.4 система координат инструмента (tool coordinate system): Система координат, привязанная к инструменту или к рабочему органу, установленному на механическом интерфейсе, обозначаемая как ![]() ИСО 8373 и ИСО 9787.
ИСО 8373 и ИСО 9787.
Примечание - Система координат инструмента связана с системой координат механического интерфейса.
3.3.5 система координат задания (task coordinate system): Система координат, привязанная к месту выполнения задания, обозначаемая как ![]() .
.
3.3.6 система координат объекта (object coordinate system): Система координат, привязанная к объекту, обозначаемая как ![]() .
.
3.3.7 система координат камеры (camera coordinate system): Система координат, привязанная к сенсору, который контролирует место выполнения задания, обозначаемая как ![]() .
.
Примечание - Система технического зрения может быть установлена для определения положения и ориентации произвольно расположенных объектов.
3.3.8 центральная точка инструмента; ЦТИ (tool centre point; TCP): Точка, определенная для конкретного технологического применения относительно системы координат механического интерфейса (по ИСО 8373).
Примечание 1 - ЦТИ является началом системы координат инструмента в соответствии с ИСО 9787.
Примечание 2 - ЦТИ можно рассматривать как важный пункт соглашения между изготовителями и пользователями по перемещаемым объектам и по каждому рабочему органу.
3.4 Информационно-измерительные средства, используемые при работе с объектами
Для надежного выполнения сложных заданий по манипулированию объектами используют сигналы различных датчиков. Захватные устройства могут иметь следующие возможности для управления с использованием обратной связи.
Примечание - Существуют и другие датчики с усложненными функциями для работы с объектами, кроме указанных в данном подразделе, например датчики положения/ориентации объекта, определения точки контакта, определения контура объекта и определения скорости движения пальца. Такие датчики должны быть определены отдельно.
3.4.1 обнаружение присутствия объекта (object presence detection): Обнаружение присутствия объекта используют для того, чтобы убедиться в следующем:
a) объект, который должен быть захвачен, расположен надлежащим образом;
b) объект успешно захвачен;
c) объект успешно отпущен.
3.4.2 определение положения пальца (finger position sensing): Определение положения пальца используют в случаях, когда:
a) для управления пальцем (например, при сервоуправлении) необходима информация о положении пальца;
b) размер или форму объекта измеряют с помощью его захватывания.
3.4.3 определение силы удерживания (gripping force sensing): Определение силы удерживания, воздействующей на объекты, используют в случаях, когда:
a) сила удерживания задана, например при манипулировании хрупкими объектами;
b) управление шарнирами пальцев необходимо для прочного захвата.
Примечание - Силу удерживания можно измерить с помощью датчика усилия или тока, приводящего в движение пальцы.
3.4.4 определение внешней силы (external force sensing): Определение внешних сил и моментов используют для того, чтобы:
a) измерить вес объекта;
b) проверить, контактирует ли захватное устройство или удерживаемый объект с объектами или препятствиями в окружающей среде;
c) получить информацию о контакте, когда она необходима для управления удерживаемым объектом, например при выполнении операции вставления.
Примечание - Внешние силы и моменты могут быть измерены с помощью силомоментного датчика или датчика тока, приводящего в движение пальцы.
3.4.5 обнаружение проскальзывания (slip detection): Обнаружение проскальзывания между пальцами и объектами используют для того, чтобы:
a) избежать удерживания и подъема слишком тяжелых объектов;
b) избежать выпадения или непрочного захвата объектов;
c) удерживать объекты с минимальным усилием, необходимым для предотвращения проскальзывания.
4 Термины и определения по захватным устройствам зажимного типа
В настоящем стандарте применены термины по ИСО 8373, а также следующие термины с соответствующими определениями.
4.1 Типы рабочих органов
4.1.1 рабочий орган инструментального типа (tool-type end effector): Рабочий орган, который самостоятельно выполняет технологическую операцию при перемещении или позиционировании руки робота.
Примечание - К рабочим органам инструментального типа относят горелки для дуговой сварки, сварочные пистолеты для точечной сварки, пескоструйные аппараты, дробилки, устройства для снятия заусенцев, фрезерные устройства, дрели, краскопульты, клеевые пистолеты, автоматические отвертки, лазеры для резки и устройства для водоструйной резки.
4.1.2 захватное устройство (gripper): Рабочий орган, сконструированный для захватывания и удержания объектов (по ИСО 8373).
Примечание - Захватное устройство или рабочий орган захватного типа, если его называть по аналогии с рабочим органом инструментального типа, представляет собой рабочий орган, который захватывает объекты для того, чтобы их переместить или разложить.
4.1.2.1 захватное устройство зажимного типа (grasp-type gripper): Захватное устройство, которое удерживает объект и манипулирует им с помощью одного или нескольких пальцеобразных механизмов.
4.1.2.2 захватное устройство незажимного типа (non-grasp-type gripper): Захватное устройство, которое удерживает объект и манипулирует им без использования пальцеобразных механизмов.
Примечание - Захватное устройство незажимного типа удерживает объекты и манипулирует ими с помощью зачерпывания, зацепления, прокалывания или прилипания либо с помощью вакуумной/магнитной/электростатической левитации.
4.2 Элементы и механизмы захватных устройств зажимного типа
4.2.1 основные механические элементы
См. рисунок 5.
|
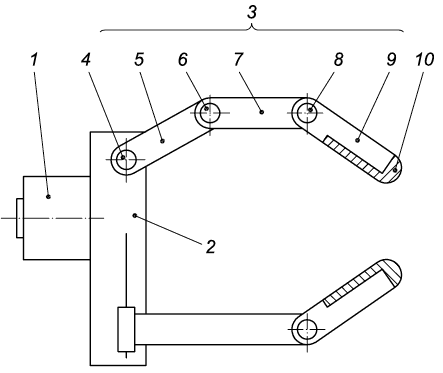
1 - интерфейс с роботом; 2 - ладонь; 3 - палец; 4 - первый шарнир; 5 - первое звено; 6 - второй шарнир; 7 - второе звено; 8 - третий шарнир; 9 - третье звено; 10 - зажимное приспособление
Рисунок 5 - Механические элементы захватного устройства
4.2.1.1 интерфейс с роботом (robot interface): Интерфейс между захватным устройством и интерфейсными элементами роботов.
4.2.1.2 ладонь (palm): Жесткий элемент в основной механической конструкции захватного устройства, на котором закреплены первые шарниры пальцев.
Примечание - Ладонь может вступать в непосредственный контакт с объектами.
4.2.1.3 палец (finger): Конструкция в виде кинематической цепи, первый шарнир которой закреплен на ладони.
Примечание - Палец может вступать в непосредственный контакт с объектами. Палец перемещается главным образом относительно ладони.
4.2.1.4 привод (actuator): Силовой механизм, используемый для приведения пальцев в движение.
Примеры - Электрический двигатель, электромагнитный привод, электростатический привод, пневматический привод, гидравлический привод, ультразвуковой двигатель, резиновый привод, сплав с эффектом памяти формы, пьезоэлектрический привод.
4.2.1.5 механизм передачи мощности (power transmission mechanism): Механизм для передачи мощности от приводов к пальцам.
Примеры - Цепная передача, проводная передача, зубчатая передача, винтовая передача, кулачковая передача, пружинная передача, прямой привод.
4.2.1.6 зажимной элемент (clamping element): Часть пальца или звена пальца специально сконструированная для непосредственного контакта с объектами.
4.2.1.7 датчик (sensor): Информационно-измерительное средство для получения от захватного устройства и/или объектов сигналов, используемых для управления захватным устройством при манипулировании объектом.
4.3 Типы захватных устройств зажимного типа
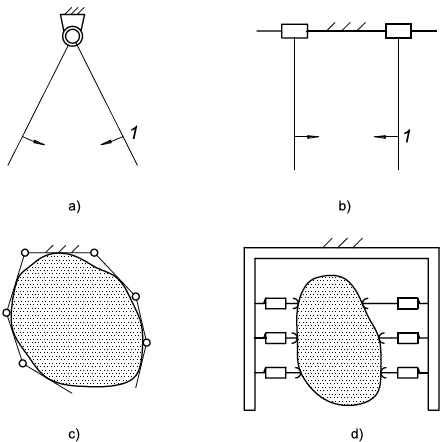
4.3.1 число степеней подвижности захватного устройства (degrees of mobility of gripper): Число поступательных и вращательных координатных осей в пространстве, в котором движутся все пальцы захватного устройства относительно ладони (см. рисунок 6).
Примечание 1 - Движение захватного устройства можно разделить на три категории: линейное, плоскостное и пространственное, в зависимости от числа степеней подвижности захватного устройства. Например, число степеней подвижности захватного устройства на рисунках 6 a), b), с) равно 1, 3, 6 соответственно.
Примечание 2 - Первым шагом при планировании заданий по манипулированию объектом является выбор числа степеней подвижности с учетом свойств объекта.
|
Рисунок 6 - Степени подвижности захватного устройства
4.3.2 число степеней свободы захватного устройства (degrees of freedom of gripper): Минимальное число входных параметров, которые могут определить конфигурацию механизма захватного устройства.
4.3.3 число степеней свободы захватного устройства с объектом (degrees of freedom of gripper with object): Число степеней свободы захватного устройства с объектом определяют таким же образом, как и число степеней свободы захватного устройства, рассматривая объект как звено и заменяя контактные точки, линии и плоскости эквивалентными шарнирами.
4.3.4 уголковое захватное устройство (angle gripper): Захватное устройство с поворотными пальцами.
4.3.5 параллельное захватное устройство (parallel gripper): Захватное устройство с поступательными пальцами, которые движутся параллельно друг другу.
4.3.6 типы захватывания
4.3.6.1 центрированное захватывание (centric grasping): Захватывание, при котором захватное устройство регулирует свое движение так, чтобы захватить объект в центре захватного устройства.
4.3.6.2 нецентрированное захватывание (non-centric grasping): Захватывание, при котором функция центрированного захватывания не выполняется.
4.3.6.3 адаптивное захватывание (adaptive grasping): Захватывание, при котором захватное устройство регулирует свою конфигурацию так, чтобы обеспечить соответствие форме объекта.
4.3.6.4 симметричное захватывание (symmetrical grasping): Захватывание, при котором пальцы осуществляют симметричные движения.
4.3.6.5 асимметричное захватывание (asymmetrical grasping): Захватывание, при котором пальцы не осуществляют симметричные движения.
4.3.6.6 силовое захватывание (power grasping): Захватывание, при котором не только пальцы, но также и ладонь или руку используют для реализации захвата по форме.
4.4 Типы пальцев
4.4.1 степени подвижности пальца (degrees of mobility of finger): Размерность пространства, в котором перемещается палец.
4.4.2 число степеней свободы пальца (degrees of freedom of finger): Минимальное число входных параметров, которые могут определить конфигурацию пальца.
4.4.3 типы движений пальца
4.4.3.1 поворотный палец (rotational finger): Палец, осуществляющий вращательные движения [см. рисунок 7 а)].
4.4.3.2 поступательный палец (translational finger): Палец, осуществляющий поступательные движения [см. рисунок 7 b)].
4.4.3.3 многошарнирный палец (multi-joint finger): Палец, имеющий несколько шарниров [см. рисунок 7 с)].
4.4.3.4 пневматический палец (inflatable finger): Палец, наполняемый воздухом под давлением [см. рисунок 7 d)].
|
1 - направление движения
Рисунок 7 - Движения пальцев
4.4.3.5 палец с механическими связями (mechanically interrelated finger): Палец, движение которого механически связано с движением другого или других пальцев [см. рисунок 8 a)].
4.4.3.6 палец без механических связей (mechanically independent finger): Палец, движение которого механически не связано сдвижением другого(их) пальца(ев) [см. рисунок 8 b)].
|
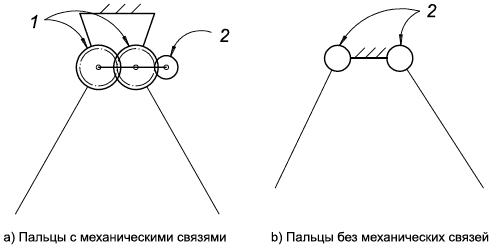
1 - зубчатая передача; 2 - привод
Рисунок 8 - Взаимосвязь между пальцами
4.5 Управление пальцами
4.5.1 двухпозиционное управление (two-value control): Способ управления, при котором возможны только две команды - "открыть" или "закрыть".
4.5.2 управление по положению (position control): Способ управления, при котором задают только положение.
4.5.3 управление по скорости (velocity control): Способ управления, при котором задают только скорость.
4.5.4 управление по усилию (force control): Способ управления, при котором задают только усилие.
4.5.5 импедансное управление (согласованное управление) [impedance control (compliance control)]: Способ управления, при котором управление по положению и управление по усилию объединяют и обеспечивают реализацию сервоуправления в системе координат задания.
4.5.6 гибридное управление (hybrid control): Способ управления, при котором управление по положению и управление по усилию в системе координат задания преобразуют в систему координат шарниров и обеспечивают реализацию сервоуправления в системе координат шарниров.
4.6 Зажимные элементы
Примечание - Зажимные элементы должны быть сконструированы так, чтобы обеспечить адаптацию к геометрическим и физическим характеристикам объекта.
4.6.1 геометрические особенности
См. рисунок 9.
|
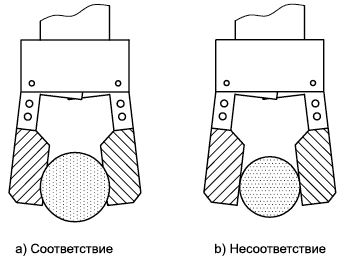
Рисунок 9 - Геометрические особенности зажимных элементов
4.6.1.1 соответствие (conforming): Характеризует зажимной элемент, форма которого сконструирована таким образом, чтобы соответствовать форме захватываемого объекта.
4.6.2 заменяемость (replaceability): Характеризует зажимной элемент, который может быть заменен другим зажимным элементом того же типа для работы с объектами того же типа.
Примечание - Зажимные элементы должны быть сконструированы заменяемыми, если они часто повреждаются при повторяющемся манипулировании объектами.
4.6.3 взаимозаменяемость (exchangeability): Характеризует зажимной элемент, который может быть заменен зажимным элементом другого типа для работы с объектами другого типа.
Примечание - Зажимные элементы могут быть сконструированы взаимозаменяемыми для того, чтобы захватное устройство обеспечивало работу с объектами, обладающими разнообразными геометрическими и физическими характеристиками.
4.7 Интерфейсы с роботом
Интерфейсы с роботом должны соответствовать механическим интерфейсам, определенным в ИСО 9409-1 и ИСО 9409-2.
4.7.1 механический интерфейс типа круглого фланца [mechanical interface (plate)]: Механический интерфейс типа круглого фланца, соответствующий требованиям ИСО 9409-1.
4.7.2 механический интерфейс типа стержня [mechanical interface (shaft)]: Механический интерфейс типа стержня, соответствующий требованиям ИСО 9409-2.
4.8 Безопасность при захватах и захватывании
4.8.1 отказобезопасность (fail-safe): Функция, предназначенная для обеспечения безопасности в случае предсказуемого сбоя любого отдельного компонента.
4.8.2 самофиксация (self-holding): Функция механизма, при которой пассивные элементы удерживают захваченный объект в захватном устройстве при отключении питания.
4.8.3 самоблокировка (self-lock): Механическая функция, предотвращающая ослабление захвата и отпускание захваченного объекта под воздействием внешних сил при отключении питания.
4.8.4 взаимоблокировка (interlock): Условное разрешение или запрещение отдельного движения захватывания или отпускания.
4.8.5 безопасность захватывания (grasping safety): Функция, предназначенная для предотвращения ненадежных захватов.
Примечание - Примерами безопасного захватывания являются автоматическое предотвращение захватывания слишком тяжелых объектов и автоматическое управление по усилию для предотвращения проскальзывания объекта.
Приложение А
(справочное)
Формы для представления характеристик захватных устройств
В данном приложении приведены примеры форм для представления характеристик захватных устройств, обеспечивающих манипулирование объектами.
Форма А1 предназначена для представления характеристик существующих или планируемых к выпуску захватных устройств. Изготовители захватных устройств могут описать характеристики своих изделий в соответствии с формой А1.
Форма А2 предназначена для представления требований к захватным устройствам для предполагаемых применений робота. Пользователи робота могут указать требования к захватному устройству, которые им необходимы, в соответствии с формой А2.
А.1 Форма А1
[Данная форма предназначена для описания характеристик | Дата составления | ||||||||||||||||||||||||||||
существующих или планируемых к выпуску захватных устройств.] | |||||||||||||||||||||||||||||
Изготовитель захватного устройства (наименование) | |||||||||||||||||||||||||||||
Изготовитель захватного устройства (адрес) | |||||||||||||||||||||||||||||
Модель захватного устройства | |||||||||||||||||||||||||||||
Тип захватного устройства | |||||||||||||||||||||||||||||
Основное назначение захватного устройства | |||||||||||||||||||||||||||||
Механическая конструкция | |||||||||||||||||||||||||||||
Чертеж [основные размеры, расположение пальцев, движение пальцев (4.4.3), расположение приводов (4.2.1.4), механизмы передачи мощности (4.2.1.5), расположение датчиков (3.4) и т.д.] | |||||||||||||||||||||||||||||
Характеристики захватного устройства | |||||||||||||||||||||||||||||
Масса захватного устройства, кг | |||||||||||||||||||||||||||||
Максимальное расстояние между пальцами, мм | |||||||||||||||||||||||||||||
Минимальное расстояние между пальцами, мм | |||||||||||||||||||||||||||||
Максимальное усилие удерживания, Н | |||||||||||||||||||||||||||||
Максимальное усилие манипулирования, Н | |||||||||||||||||||||||||||||
Максимально допустимый момент на пальце, Н·м | |||||||||||||||||||||||||||||
Площадь поверхности удерживания, мм | |||||||||||||||||||||||||||||
Время срабатывания (время захватывания, время отпускания и т.д.), с | |||||||||||||||||||||||||||||
Тип захватного устройства | |||||||||||||||||||||||||||||
Число пальцев | |||||||||||||||||||||||||||||
Расположение пальцев | |||||||||||||||||||||||||||||
Число степеней подвижности захватного устройства (4.3.1) | |||||||||||||||||||||||||||||
Число степеней свободы захватного устройства (4.3.2) | |||||||||||||||||||||||||||||
Тип сжимания (4.3.6) | |||||||||||||||||||||||||||||
Пальцы | |||||||||||||||||||||||||||||
Число степеней подвижности пальца (4.4.1) | |||||||||||||||||||||||||||||
Число степеней свободы пальца (4.4.2) | |||||||||||||||||||||||||||||
Движения пальца (4.4.3) | |||||||||||||||||||||||||||||
Приводы (4.2.1.4) | |||||||||||||||||||||||||||||
Тип приводов | |||||||||||||||||||||||||||||
Число приводов | |||||||||||||||||||||||||||||
Номинальная мощность приводов, Вт | |||||||||||||||||||||||||||||
Механизмы передачи мощности (4.2.1.5) | |||||||||||||||||||||||||||||
Детализация движений пальца (относительно системы координат механического интерфейса, определенной в ISO 9787) | |||||||||||||||||||||||||||||
Определение ЦТИ (3.3.8): смещение от плоскости | |||||||||||||||||||||||||||||
Определение ЦТИ (3.3.8): смещение от оси | |||||||||||||||||||||||||||||
Управление пальцем | |||||||||||||||||||||||||||||
Схема управления пальцем (4.5) | |||||||||||||||||||||||||||||
Управляющие сигналы | |||||||||||||||||||||||||||||
Сигналы обратной связи | |||||||||||||||||||||||||||||
Блок-схема управления пальцами | |||||||||||||||||||||||||||||
Функции датчиков (3.4) | |||||||||||||||||||||||||||||
Зажимные элементы (4.6) | |||||||||||||||||||||||||||||
Материал | |||||||||||||||||||||||||||||
Заменяемость/взаимозаменяемость | |||||||||||||||||||||||||||||
Рабочая среда | |||||||||||||||||||||||||||||
Характеристики объектов | |||||||||||||||||||||||||||||
Геометрия (форма, размеры), мм | |||||||||||||||||||||||||||||
Масса объектов, кг | |||||||||||||||||||||||||||||
Максимальная/минимальная температура объектов, °С | |||||||||||||||||||||||||||||
Характеристики поверхности | |||||||||||||||||||||||||||||
Магнитные свойства | |||||||||||||||||||||||||||||
Интерфейсы с роботом (4.7) и механизмы запястья | |||||||||||||||||||||||||||||
Механический интерфейс: соответствие стандарту | обозначение | ||||||||||||||||||||||||||||
Чертеж (приводят, если конструкция интерфейса является оригинальной разработкой компании) | |||||||||||||||||||||||||||||
Удобство обслуживания (передача энергии и сигналов) | |||||||||||||||||||||||||||||
Безопасность (4.8) | |||||||||||||||||||||||||||||
Предупреждение (если необходимы какие-либо специальные меры предосторожности при | |||||||||||||||||||||||||||||
работе захватного устройства, то следует их описать): | |||||||||||||||||||||||||||||
Другие характеристики: | |||||||||||||||||||||||||||||
_______________
Зажимные элементы могут быть изготовлены из эластичных материалов для адаптации к геометрическим или физическим свойствам объектов. Для работы с тяжелыми объектами с гладкими поверхностями следует использовать зажимные элементы с грубыми поверхностями. Для работы с высокотемпературными объектами следует использовать термостойкие элементы. Для объектов с абразивными поверхностями следует использовать износостойкие элементы. Антикоррозионные материалы могут быть использованы при работе в тяжелых условиях окружающей среды.
А.2 Форма А2
[Данная форма предназначена для описания требований к | Дата составления | ||||||||||||||||||||||||||||
захватным устройствам.] | |||||||||||||||||||||||||||||
Потребитель робота (наименование) | |||||||||||||||||||||||||||||
Потребитель робота (адрес) | |||||||||||||||||||||||||||||
Область применения | |||||||||||||||||||||||||||||
Описание задачи | |||||||||||||||||||||||||||||
Характеристики перемещаемого объекта | |||||||||||||||||||||||||||||
Наименование объекта | |||||||||||||||||||||||||||||
Геометрия (форма, размеры), мм | |||||||||||||||||||||||||||||
Масса объекта, кг | |||||||||||||||||||||||||||||
Центр тяжести, мм | |||||||||||||||||||||||||||||
Максимальная/минимальная температура объекта, °С | |||||||||||||||||||||||||||||
Характеристики поверхности | |||||||||||||||||||||||||||||
Магнитные свойства | |||||||||||||||||||||||||||||
Особенности материала (материал, дефекты и т.д.) | |||||||||||||||||||||||||||||
Изменение размеров при обработке, мм | |||||||||||||||||||||||||||||
Рекомендуемые поверхности для работы | |||||||||||||||||||||||||||||
Поверхности, к которым нельзя прикасаться | |||||||||||||||||||||||||||||
Чертеж объекта (размеры, изменение размеров в процессе обработки, центр тяжести, рекомендуемая поверхность для работы и т.д.) | |||||||||||||||||||||||||||||
Требования к работе с объектом | |||||||||||||||||||||||||||||
Пространственное расположение объекта перед перемещением | |||||||||||||||||||||||||||||
Пространственное расположение объекта после перемещения | |||||||||||||||||||||||||||||
Производимые манипуляции, когда объект в захватном устройстве | |||||||||||||||||||||||||||||
Максимальные допустимые силы, прикладываемые к объекту, Н | |||||||||||||||||||||||||||||
Время срабатывания (время захватывания, время отпускания, время цикла и т.д.), с | |||||||||||||||||||||||||||||
Возможное загрязнение объекта | |||||||||||||||||||||||||||||
Чертеж требований к работе с объектом (системы координат, пространственные расположения объекта и т.д.) | |||||||||||||||||||||||||||||
Требования к захватному устройству | |||||||||||||||||||||||||||||
Количество пальцев | |||||||||||||||||||||||||||||
Расположение пальцев | |||||||||||||||||||||||||||||
Степени подвижности захватного устройства (4.3.1) | |||||||||||||||||||||||||||||
Степени свободы захватного устройства (4.3.2) | |||||||||||||||||||||||||||||
Тип захватывания (4.3.6) | |||||||||||||||||||||||||||||
Требования к пальцу | |||||||||||||||||||||||||||||
Степени подвижности пальца (4.4.1). | |||||||||||||||||||||||||||||
Степени свободы пальца (4.4.2) | |||||||||||||||||||||||||||||
Движение пальца (4.4.3) | |||||||||||||||||||||||||||||
Предлагаемые приводы (4.2.1.4) | |||||||||||||||||||||||||||||
Предлагаемое управление пальцем | |||||||||||||||||||||||||||||
Схема управления пальцем (4.5) | |||||||||||||||||||||||||||||
Сигналы управления | |||||||||||||||||||||||||||||
Сигналы обратной связи | |||||||||||||||||||||||||||||
Требования к функциям датчиков (3.4) | |||||||||||||||||||||||||||||
Интерфейсы с роботом (4.7) | |||||||||||||||||||||||||||||
Механический интерфейс: соответствие стандарту | обозначение | ||||||||||||||||||||||||||||
Удобство обслуживания (передача энергии и сигналов) | |||||||||||||||||||||||||||||
Безопасность (4.8) | |||||||||||||||||||||||||||||
Характеристики робота, необходимые для выполнения задачи | |||||||||||||||||||||||||||||
Рабочее пространство, мм | |||||||||||||||||||||||||||||
Максимальная полезная нагрузка, Н | |||||||||||||||||||||||||||||
Повторяемость пространственного расположения, мм | |||||||||||||||||||||||||||||
Время стабилизации пространственного расположения, с | |||||||||||||||||||||||||||||
Число степени подвижности | |||||||||||||||||||||||||||||
Расположение шарниров | |||||||||||||||||||||||||||||
Число рук | |||||||||||||||||||||||||||||
Другие требования: | |||||||||||||||||||||||||||||
Алфавитный указатель терминов на русском языке
безопасность захватывания | 4.8.5 |
взаимоблокировка | 4.8.4 |
взаимозаменяемость | 4.6.3 |
действие | 3.1.8 |
датчик | 4.2.1.7 |
заменяемость | 4.6.2 |
захват | 3.1.4 |
захват внешний | 3.2.1.4 |
захват внутренний | 3.2.1.5 |
захват объекта | 3.1.4 |
захват по усилию | 3.2.1.3 |
захват по форме | 3.2.1.2 |
захват с внешней стороны | 3.2.1.4 |
захват с внутренней стороны | 3.2.1.5 |
захват устойчивый | 3.2.3 |
захватывание | 3.1.5 |
захватывание адаптивное | 4.3.6.3 |
захватывание асимметричное | 4.3.6.5 |
захватывание нецентрированное | 4.3.6.2 |
захватывание силовое | 4.3.6.6 |
захватывание симметричное | 4.3.6.4 |
захватывание центрированное | 4.3.6.1 |
интерфейс с роботом | 4.2.1.1 |
интерфейс типа круглого фланца механический | 4.7.1 |
интерфейс типа стержня механический | 4.7.2 |
ладонь | 4.2.1.2 |
манипулирование объектом | 3.1.2 |
механизм передачи мощности | 4.2.1.5 |
обнаружение присутствия объекта | 3.4.1 |
обнаружение проскальзывания | 3.4.5 |
объект | 3.1.1 |
объект манипулирования | 3.1.1 |
определение внешней силы | 3.4.4 |
определение положения пальца | 3.4.2 |
определение силы удерживания | 3.4.3 |
орган инструментального типа рабочий | 4.1.1 |
особенности геометрические | 4.6.1 |
отказобезопасность | 4.8.1 |
палец | 4.2.1.3 |
палец без механических связей | 4.4.3.6 |
палец многошарнирный | 4.4.3.3 |
палец пневматический | 4.4.3.4 |
палец поворотный | 4.4.3.1 |
палец поступательный | 4.4.3.2 |
палец с механическими связями | 4.4.3.5 |
привод | 4.2.1.4 |
отпускание | 3.1.6 |
самоблокировка | 4.8.3 |
самофиксация | 4.8.2 |
свободный | 3.1.9.4 |
сила контактная | 3.2.2.1 |
сила манипулирования | 3.2.2.2 |
сила удерживания | 3.2.2.3 |
силы, действующие при захвате | 3.2.2 |
система координат глобальная | 3.3.1 |
система координат задания | 3.3.5 |
система координат инструмента | 3.3.4 |
система координат камеры | 3.3.7 |
система координат механического интерфейса | 3.3.3 |
система координат объекта | 3.3.6 |
система координат основания | 3.3.2 |
соответствие | 4.6.1.1 |
состояние | 3.1.7 |
состояние 1 | 3.1.9.1 |
состояние 2 | 3.1.9.2 |
состояние 3 | 3.1.9.3 |
состояние 4 | 3.1.9.4 |
состояние объекта | 3.1.7 |
степени свободы захваченного объекта | 3.2.1.1 |
степени подвижности пальца | 4.4.1 |
типы движений пальца | 4.4.3 |
типы захвата | 3.2.1 |
типы захватывания | 4.3.6 |
типы состояния объекта | 3.1.9 |
точка инструмента центральная | 3.3.8 |
удержание | 3.1.3 |
удержание объекта | 3.1.3 |
удерживаемый | 3.1.9.1 |
уложенный | 3.1.9.3 |
управление гибридное | 4.5.6 |
управление двухпозиционное | 4.5.1 |
управление импедансное | 4.5.5 |
управление по положению | 4.5.2 |
управление по скорости | 4.5.3 |
управление по усилию | 4.5.4 |
управление согласованное | 4.5.5 |
устойчивость захвата | 3.2.3.1; 3.2.3.2 |
устройство зажимного типа захватное | 4.1.2.1 |
устройство захватное | 4.1.2 |
устройство захватное параллельное | 4.3.5 |
устройство захватное уголковое | 4.3.4 |
устройство незажимного типа захватное | 4.1.2.2 |
ЦТИ | 3.3.8 |
частично удерживаемый | 3.1.9.2 |
число степеней подвижности захватного устройства | 4.3.1 |
число степеней свободы захватного устройства | 4.3.2 |
число степеней свободы захватного устройства с объектом | 4.3.3 |
число степеней свободы пальца | 4.4.2 |
элемент зажимной | 4.2.1.6 |
элементы механические основные | 4.2.1 |
Алфавитный указатель эквивалентов терминов на английском языке
action | 3.1.8 |
actuator | 4.2.1.4 |
adaptive grasping | 4.3.6.3 |
angle gripper | 4.3.4 |
asymmetrical grasping | 4.3.6.5 |
base coordinate system | 3.3.2 |
basic mechanical elements | 4.2.1 |
cam transmission | 4.2.1.5 |
camera coordinate system | 3.3.7 |
centric grasping | 4.3.6.1 |
clamping element | 4.2.1.6 |
compliance control | 4.5.5 |
conforming | 4.6.1.1 |
contact force | 3.2.2.1 |
degrees of freedom of finger | 4.4.2 |
degrees of freedom of grasped object | 3.2.1.1 |
degrees of freedom of gripper | 4.3.2 |
degrees of freedom of gropper with object | 4.3.3 |
degrees of mobility of finger | 4.4.1 |
degrees of mobility of gripper | 4.3.1 |
direct actuation | 4.2.1.5 |
electric motor | 4.2.1.4 |
electromagnetic actuator | 4.2.1.4 |
electrostatic actuator | 4.2.1.4 |
exchangeability | 4.6.3 |
external force sensing | 3.4.4 |
external grasp | 3.2.1.4 |
fail-safe | 4.8.1 |
finger | 4.2.1.3 |
finger position sensing | 3.4.2 |
force closure grasp | 3.2.1.3 |
force control | 4.5.4 |
forces in grasps | 3.2.2 |
form closure grasp | 3.2.1.2 |
free | 3.1.9.4 |
gear transmission | 4.2.1.5 |
geometrical features | 4.6.1 |
grasp | 3.1.4 |
grasp stability | 3.2.3.1 |
grasping | 3.1.5 |
grasping safety | 4.8.5 |
grasp-type gripper | 4.1.2.1 |
grip | 3.1.3 |
gripped | 3.1.9.1 |
gripper | 4.1.2 |
gripping force | 3.2.2.3 |
gripping forse sensing | 3.4.3 |
hybrid control | 4.5.6 |
hydraulic actuator | 4.2.1.4 |
impedance control | 4.5.5 |
inflatable finger | 4.4.3.4 |
inside grasp | 3.2.1.5 |
interlock | 4.8.4 |
internal grasp | 3.2.1.5 |
laid | 3.1.9.3 |
linkage transmission | 4.2.1.5 |
manipulating force | 3.2.2.2 |
mechanical interface (plate) | 4.7.1 |
mechanical interface (shaft) | 4.7.2 |
mechanical interface coordinate system | 3.3.3 |
mechanically independent finger | 4.4.3.6 |
mechanically interrelated finger | 4.4.3.5 |
multi-joint finger | 4.4.3.3 |
non-centric grasping | 4.3.6.2 |
non-grasp-type gripper | 4.1.2.2 |
object | 3.1.1 |
object coordinate system | 3.3.6 |
object handling | 3.1.2 |
object presence detection | 3.4.1 |
outside grasp | 3.2.1.4 |
palm | 4.2.1.2 |
parallel gripper | 4.3.5 |
piezoelectric actuator | 4.2.1.4 |
pneumatic actuator | 4.2.1.4 |
position control | 4.5.2 |
power grasping | 4.3.6.6 |
power transmission mechanism | 4.2.1.5 |
releasing | 3.1.6 |
replaceability | 4.6.2 |
robot interface | 4.2.1.1 |
rotational finger | 4.4.3.1 |
rubber actuator | 4.2.1.4 |
screw transmission | 4.2.1.5 |
self-holding | 4.8.2 |
self-lock | 4.8.3 |
semi-gripped | 3.1.9.2 |
sensor | 4.2.1.7 |
shape memory alloy | 4.2.1.4 |
slip detection | 3.4.5 |
spring transmission | 4.2.1.5 |
stable grasps | 3.2.3 |
state | 3.1.7 |
state 1 | 3.1.9.1 |
state 2 | 3.1.9.2 |
state 3 | 3.1.9.3 |
state 4 | 3.1.9.4 |
symmetrical grasping | 4.3.6.4 |
task coordinate system | 3.3.5 |
TCP | 3.3.8 |
Tool Centre Point | 3.3.8 |
tool coordinate system | 3.3.4 |
tool-type end effector | 4.1.1 |
translational finger | 4.4.3.2 |
two-value control | 4.5.1 |
type of finger movements | 4.4.3 |
type of grasping | 4.3.6 |
type of grasps | 3.2.1 |
type of states | 3.1.9 |
ultrasonic motor | 4.2.1.4 |
velocity control | 4.5.3 |
wire transmission | 4.2.1.5 |
world coordinate system | 3.3.1 |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 8373:1994 | - | *, |
ISO 9409-1:1996 | - | *, |
ISO 9409-2:1996 | - | *, |
ISO 9787:1999 | - | *, |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
_______________
Действует ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 "Роботы и робототехнические устройства. Термины и определения", идентичный ISO 8373:2012.
![]() Действует ГОСТ Р 60.3.4.1-2016/ИСО 9409-1:2004* "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Круглые фланцы", идентичный ISO 9409-1:2004.
Действует ГОСТ Р 60.3.4.1-2016/ИСО 9409-1:2004* "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Круглые фланцы", идентичный ISO 9409-1:2004.
![]() Действует ГОСТ Р 60.3.4.2-2016/ИСО 9409-2:2002** "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Стержни", идентичный ISO 9409-2:2002.
Действует ГОСТ Р 60.3.4.2-2016/ИСО 9409-2:2002** "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Стержни", идентичный ISO 9409-2:2002.
______________________
* Вероятно, ошибка оригинала. Следует читать: ГОСТ Р 60.3.4.1-2017/ИСО 9409-1:2004;
** Вероятно, ошибка оригинала. Следует читать: ГОСТ Р 60.3.4.2-2017/ИСО 9409-2:2002 . - Примечания изготовителя базы данных.
![]() Действует ГОСТ Р 60.0.0.3-2016/ИСО 9787:2013 "Роботы и робототехнические устройства. Системы координат и обозначение перемещений", идентичный ISO 9787:2013.
Действует ГОСТ Р 60.0.0.3-2016/ИСО 9787:2013 "Роботы и робототехнические устройства. Системы координат и обозначение перемещений", идентичный ISO 9787:2013.
УДК 621.865.8:007.52:006.354 | ОКС 01.040.25 | ||
Ключевые слова: робототехнические устройства, промышленные роботы, перемещение объектов, захватные устройства зажимного типа, термины и определения, представление характеристик | |||
Электронный текст документа
и сверен по:
, 2020
{kind=link}