ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
60.2.2.4—
2023
(МЭК 80601-2-78:
2019)
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Частные требования безопасности с учетом основных функциональных характеристик медицинских роботов для реабилитации, оценки состояния, компенсации или облегчения
(IEC 80601-2-78:2019, Medical electrical equipment — Part 2-78: Particular requirements for basic safety and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation, MOD)
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 859-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту МЭК 80601-2-78:2019 «Изделия медицинские электрические. Часть 2-78. Частные требования безопасности с учетом основных функциональных характеристик к медицинским роботам для реабилитации, оценки, компенсации или облегчения» (IEC 80601-2-78:2019 «Medical electrical equipment— Part 2-78: Particular requirements for basic safety and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Международный стандарт разработан подкомитетом 62D «Электромедицинское оборудование» технического комитета МЭК/ТК 62 «Электрооборудование в медицинской практике» и Техническим комитетом ИСО/ТК 299 «Робототехника».
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© IEC, 2019 © Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
201.1 Область применения, цель, дополнительные и частные стандарты
201.2 Нормативные ссылки
201.3 Термины и определения
201.4 Общие требования
201.5 Общие требования к испытаниям МЭИ
201.6 Классификация МЭИ и МЭС
201.7 Идентификация, маркировка и документация МЭИ
201.8 Защита от ОПАСНОСТЕЙ поражения электрическим током
201.9 Защита от МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, создаваемых МЭИ и МЭС
201.10 Защита от ОПАСНОСТЕЙ воздействия нежелательного или чрезмерного излучения
201.11 Защита от чрезмерных температур и других ОПАСНОСТЕЙ
201.12 Точность органов управления и измерительных приборов и защита от опасных значений выходных характеристик
201. 13 ОПАСНЫЕ СИТУАЦИИ и условия нарушения для МЭИ
201.14 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ
201.15 Конструкция МЭИ
201.16 МЭС
201.17 ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ МЭИ и МЭС
202 ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ. Требования и испытания
206 ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ
208 * Общие требования, испытания и руководящие указания по применению систем сигнализации МЭИ и МЭС
Приложения
Приложение А (справочное) Общие положения и обоснования
Приложение АА (справочное) Частные положения и обоснования
Приложение ВВ (справочное) Указания по СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ и примеры . . . .46
Приложение ДА (справочное) Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте...............58
Библиография........................................................................59
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Безопасность» и распространяется на МЕДИЦИНСКИЕ РОБОТЫ, физически взаимодействующие с ПАЦИЕНТОМ для РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ или ОБЛЕГЧЕНИЯ, связанных с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ ПАЦИЕНТА.
Настоящий стандарт является частным по отношению к ГОСТ Р МЭК 60601-1—2022, идентичному международному стандарту МЭК 60601-1:2020, который является общим для целого ряда частных стандартов. Настоящий стандарт изменяет и дополняет ГОСТ Р МЭК 60601-1—2022 в части, относящейся к МЕДИЦИНСКИМ РОБОТАМ, физически взаимодействующим с ПАЦИЕНТОМ в целях РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ или ОБЛЕГЧЕНИЯ.
В настоящем стандарте для сохранения связи с общим стандартом ГОСТ Р МЭК 60601-1—2022 использована разъясненная в 201.1.4 система нумерации, обозначений и шрифтовых выделений примененного стандарта.
В настоящий стандарт внесены следующие технические отклонения по отношению к МЭК 80601-2-78:2019:
- стандарт оформлен с соблюдением требований, установленных в ГОСТ Р 1.5—2012 и ГОСТ Р 1.7—2014 (пункт 7.2);
- нормативные ссылки на международные стандарты заменены ссылками на соответствующие национальные и межгосударственные стандарты;
- терминологические статьи, дополнительно определенные в настоящем стандарте, расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5, соответственно изменены нумерация и порядок комментариев к терминологическим статьям в приложении АА;
- не включены пункты 210 и 211 примененного стандарта, а также пояснения к ним в приложении АА в связи с отсутствием гармонизированных с МЭК 60601-1-10 и МЭК 60601-1-11 межгосударственных или национальных стандартов;
- из приложения АА исключены пояснения к 206.4.2 и 206.5, касающиеся замененных редакций стандарта МЭК, которые нецелесообразно применять в национальной стандартизации;
- не включен алфавитный список использованных терминов.
Все изменения и дополнения в тексте выделены курсивом.
В настоящем стандарте приняты следующие шрифтовые выделения:
- требования и определения — прямой шрифт;
- методы испытаний — курсив;
- информационный материал, приведенный вне таблиц (примечания, примеры и справочная информация), а также нормативный текст таблиц — шрифт уменьшенного размера;
- ТЕРМИНЫ, ОПРЕДЕЛЕННЫЕ В ПУНКТЕ 3 ОБЩЕГО СТАНДАРТА И В НАСТОЯЩЕМ СТАНДАРТЕ ИЛИ УКАЗАННЫЕ В ПРИМЕЧАНИИ: ЗАГЛАВНЫЕ БУКВЫ.
В настоящем стандарте для сохранения связи с общим стандартом используются следующие наименования структурных элементов:
- «пункт» означает один из девятнадцати пронумерованных пунктов в оглавлении, включая все подпункты (например, пункт 7 включая его подпункты 7.1, 7.2 и т. д.);
- «подпункт» означает пронумерованный подпункт (например, 7.1, 7.2 и 7.2.1 являются подпунктами пункта 7).
В настоящем стандарте обозначения структурных элементов «пункт» и «подпункт» состоят из цифр, разделенных точкой, поэтому ссылки на данные структурные элементы выполнены согласно ГОСТ 1.5—2001,4.8.
В настоящем стандарте союз «или» использован как включающее «или», т. е. утверждение будет истинным при любой комбинации условий.
Глагольные формы, используемые в настоящем стандарте, совпадают по форме с описанными в пункте 7 Директив ИСО/МЭК (часть 2). В рамках настоящего стандарта вспомогательные глаголы имеют следующие значения:
- «должен» означает, что соблюдение требований или испытаний является обязательным для соответствия настоящему стандарту;
- «следует» означает, что соблюдение требований или испытаний рекомендуется, но не является обязательным для соответствия настоящему стандарту;
- «может» используется для описания допустимого способа достижения соответствия требованиям или испытаниям.
Знак звездочки (*) в качестве первого символа заголовка или в начале абзаца или заголовка таблицы указывает на наличие в приложении АА руководства или обоснования, относящегося к этому структурному элементу.
ГОСТ Р 60.2.2.4—2023 (МЭК 80601-2-78:2019)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Частные требования безопасности с учетом основных функциональных характеристик медицинских роботов для реабилитации, оценки состояния, компенсации или облегчения
Robots and robotic devices. Medical electrical equipment. Particular requirements for the safety and basic performance of medical robots for rehabilitation, assessment, compensation or alleviation
Дата введения — 2024—01—01
201.1 Область применения, цель, дополнительные и частные стандарты
Применяют раздел 1 общего стандарта, за исключением следующего.
Примечание — Общий стандарт ГОСТ Р МЭК 60601-1—2022 «Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик».
201.1.1 Область применения
Замена
Настоящий стандарт устанавливает требования к БЕЗОПАСНОСТИ и ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ МЕДИЦИНСКИХ РОБОТОВ, которые физически взаимодействуют с ПАЦИЕНТОМ с НАРУШЕНИЯМИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ для осуществления РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ или ОБЛЕГЧЕНИЯ, как это предусмотрено ИЗГОТОВИТЕЛЕМ.
Если пункт или подпункт настоящего стандарта распространяется только на МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ ИЗДЕЛИЯ (МЭИ) или только на МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ (МЭС), то это будет указано в заголовке и тексте данного пункта или подпункта. В противном случае пункт или подпункт распространяется и на МЭИ, и на МЭС.
Примечание — См. также 4.2 общего стандарта.
Настоящий стандарт не распространяется:
- на наружные протезы конечностей (см. ГОСТ Р ИСО 22523);
- электрические инвалидные коляски (см. серию стандартов под общим наименованием «Кресла-коляски»);
- диагностическое оборудование с визуализацией (например, МРТ, см. ГОСТ Р МЭК 60601-2-33);
- РОБОТЫ для персонального ухода (см. ГОСТ Р 60.2.2.1).
201.1.2 Цель
Замена
Цель настоящего стандарта — установить частные требования к БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК МЕДИЦИНСКИХ РОБОТОВ, физически взаимодействующих с ПАЦИЕНТОМ с НАРУШЕНИЯМИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ для поддержки или осуществления РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ или ОБЛЕГЧЕНИЯ.
Издание официальное
201.1.3 Дополнительные стандарты
Дополнение
Настоящий стандарт имспользует ссылки на применяемые дополнительные стандарты, перечисленные в пункте 2 общего стандарта и пункте 201.2.
ГОСТ Р МЭК 60601-1-2, ГОСТ Р МОК 60601-1-6 и ГОСТ IEC 60601-1-8 применяют с изменениями, указанными в пунктах 202, 206, 208 соответственно. ГОСТ Р МЭК 60601-1-3 и [1] не применяют. Все остальные дополнительные стандарты, опубликованные в серии стандартов под общим наименованием «Изделия медицинские электрические», применяют в том виде, в котором они опубликованы.
201.1.4 Частные стандарты
Замена
Стандарты серии под общим наименованием «Изделия медицинские электрические», частные по отношению к общему стандарту, могут изменять, заменять или отменять требования, содержащиеся в общем стандарте и дополнительных стандартах, имеющих прямое отношение к конкретным МЭИ, а также могут добавлять другие требования БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК.
Требования настоящего стандарта являются приоритетными по отношению к соответствующим требованиям общего стандарта.
Для краткости ГОСТ Р МЭК 60601-1—2022 именуется в настоящем стандарте как общий стандарт. Ссылки на дополнительные стандарты даны по их номерам.
Нумерация пунктов и подпунктов настоящего стандарта соответствует общему стандарту, но имеет префикс «201» (например, пункт 201.1 настоящего стандарта соответствует содержимому пункта 1 общего стандарта), или дополнительному стандарту, но с префиксом «20х», где «х» — последняя(ие) цифра(ы) номера дополнительного стандарта (например, пункт 206.4 настоящего стандарта соответствует содержанию пункта 4 дополнительного стандарта ГОСТ Р МЭК 60601-1-6, пункт 203.4 настоящего стандарта соответствует содержанию пункта 4 дополнительного стандарта ГОСТ Р МЭК 60601-1-3 и т. д.). Изменения, вносимые в текст общего стандарта, обозначены следующими словами:
«замена» означает, что пункт или подпункт общего стандарта или применимого дополнительного стандарта полностью заменен текстом настоящего стандарта;
«дополнение» — текст настоящего стандарта является дополнением к требованиям общего стандарта или соответствующего дополнительного стандарта;
«изменение» — пункт или подпункт общего стандарта или соответствующего дополнительного стандарта изменен в соответствии с текстом настоящего стандарта.
Подпункты, рисунки или таблицы, которые введены дополнительно относительно общего стандарта, пронумерованы начиная с 201.101. Однако вследствие того, что определения в общем стандарте пронумерованы с 3.1 по 3.147, дополнительные определения в настоящем стандарте пронумерованы начиная с 201.3.201. Дополнительные приложения обозначены буквами АА, ВВ и т. д., дополнительные перечисления — аа), бб) и т. д.
Подпункты, рисунки или таблицы, введенные дополнительно относительно дополнительного стандарта, пронумерованы начиная с «20х», где «х» — номер дополнительного стандарта, например 202 для ГОСТ Р МЭК 60601-1-2.
Термин «настоящий стандарт» использован для совместной ссылки на общий стандарт, любые применимые дополнительные стандарты и настоящий стандарт в совокупности.
При отсутствии пункта или подпункта в настоящем стандарте применяют без изменений соответствующий пункт или подпункт общего стандарта или применимого дополнительного стандарта; если какая-либо часть общего стандарта или применимого дополнительного стандарта не должна применяться, то в настоящем стандарте это должно быть указано.
201.2 Нормативные ссылки
Примечание — Справочные ссылки приведены в библиографии.
Применяют пункт 2 общего стандарта, за исключением нижеприведенного.
Замена
ГОСТ IEC 60601-1-8 Изделия медицинские электрические. Часть 1-8. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Общие требова-2
ния, испытания и руководящие указания по применению систем сигнализации медицинских электрических изделий и медицинских электрических систем
ГОСТ ISO 14971-2021 Изделия медицинские. Применение менеджмента риска к медицинским изделиям
ГОСТ Р МОК 60601-1-2—2014 Изделия медицинские электрические. Часть 1-2. Общие требования безопасности с учетом основных функциональных характеристик. Параллельный стандарт. Электромагнитная совместимость. Требования и испытания
ГОСТ Р МЭК 60601-1-6 Изделия медицинские электрические. Часть 1-6. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Эксплуатационная пригодность
Дополнение:
ГОСТ Р 60.0.0.4—2023/ИСО 8373:2021 Роботы и робототехнические устройства. Термины и определения
ГОСТ Р 60.1.2.1—2016/ИСО 10218-1:2011 Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы
ГОСТ Р 60.2.2.1—2016/ИСО 13482:2014 Роботы и робототехнические устройства. Требования по безопасности для роботов по персональному уходу
ГОСТ Р ИСО 9999—2019 Вспомогательные средства для людей с ограничениями жизнедеятельности. Классификация и терминология
ГОСТ Р ИСО 10535 Подъемники для инвалидов. Требования и методы испытаний
ГОСТ Р ИСО 11064-7—2016 Эргономическое проектирование центров управления. Часть 7. Принципы верификации и валидации
ГОСТ Р ИСО 15223-1 Изделия медицинские. Символы, применяемые для передачи информации, предоставляемой изготовителем. Часть 1. Основные требования
ГОСТ Р ИСО 22523 Протезы конечностей и ортезы наружные. Требования и методы испытаний
ГОСТ Р МЭК 60601-1—2022 Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик
ГОСТ Р МЭК 60601-1-3 Изделия медицинские электрические. Часть 1-3. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Защита от излучения в диагностических рентгеновских аппаратах
ГОСТ Р МЭК 60601-2-33 Изделия медицинские электрические. Часть 2-33. Частные требования безопасности с учетом основных функциональных характеристик к медицинскому диагностическому оборудованию, работающему на основе магнитного резонанса
ГОСТ Р МЭК 62366-1—2021 Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
201.3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р МЭК 60601-1, а также следующие термины с соответствующими определениями.
Примечание — Далее РОБОТ ДЛЯ РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ и ОБЛЕГЧЕНИЯ обозначен как РОБОТ РОКО.
Замена
201.3.63* МЕДИЦИНСКОЕ ЭЛЕКТРИЧЕСКОЕ ИЗДЕЛИЕ; МЭИ (MEDICAL ELECTRICAL EQUIPMENT; ME EQUIPMENT)
Дополнение
Примечание —См. рисунокAA.1.
201.3.65 ПЕРЕДВИЖНОЕ ИЗДЕЛИЕ (MOBILE)
Дополнение
Примечание — К ПЕРЕДВИЖНЫМ ИЗДЕЛИЯМ относят также изделия, предназначенные для помощи в перемещении ПАЦИЕНТА из одного места в другое.
201.3.144* НОСИМОЕ НА ТЕЛЕ (BODY-WORN)
Замена
ПЕРЕНОСНОЕ изделие, ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ которого включает работу при ношении ПАЦИЕНТОМ или прикреплении к одежде ПАЦИЕНТА.
Дополнение
201.3.201 АВАРИЙНЫЙ ОСТАНОВ (EMERGENCY STOP): Инициируемое вручную прерывание работы, предназначенное для остановки РОБОТА РОКО для предотвращения причинения ВРЕДА.
Примечания
1 АВАРИЙНЫЙ ОСТАНОВ является крайней мерой, когда отсутствуют другие средства для снижения РИСКА.
2 АВАРИЙНЫЙ ОСТАНОВ не предусматривает автоматический перезапуск в отличие от ЗАЩИТНОГО ОСТАНОВА.
3 Активация АВАРИЙНОГО ОСТАНОВА не обязательно полностью отключает питание РОБОТА РОКО. Более подробные сведения приведены в 9.2.4 общего стандарта.
2 01.3.202 ДВИГАТЕЛЬНАЯ ФУНКЦИЯ (MOVEMENT FUNCTION): Функция, состоящая из одной или нескольких сенсорных, нервно-мышечно-скелетных или связанных с движением функций организма, которые заключают в себе управление движениями ПАЦИЕНТА.
Примечания
1 Термины «сенсорные», «нервно-мышечно-скелетные» и «связанные с движением» заимствованы из классификации функций организма, представленной в ГОСТ Р 60.2.2.1.
2 РОБОТ РОКО не обязательно должен охватывать все перечисленные аспекты.
2 01.3.203* ЗАЩИТНЫЙ ОСТАНОВ (PROTECTIVE STOP): Прерывание работы, автоматически инициируемое РОБОТОМ РОКО, вызывающее остановку движения в целях обеспечения БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК, но позволяющее ПРОГРАММИРУЕМОЙ ЭЛЕКТРИЧЕСКОЙ МЕДИЦИНСКОЙ СИСТЕМЕ (ПЭМС) или ПРОГРАММИРУЕМОЙ ЭЛЕКТРОННОЙ ПОДСИСТЕМЕ (ПЭПС) осуществить перезапуск
Примечания
1 См. также ГОСТ Р 60.0.0.4—2023, 6.24.
2 Определение ЗАЩИТНОГО ОСТАНОВА приведено для демонстрации отличия от АВАРИЙНОГО ОСТАНОВА или нормального останова; пояснения приведены в таблице 201.102.
3 «Автоматически инициируемое» означает, что РОБОТ РОКО обнаруживает потенциально ОПАСНУЮ СИТУАЦИЮ и инициирует процедуру остановки.
4 Данный термин связан с РЕЖИМОМ НЕЙТРАЛИЗАЦИИ НЕИСПРАВНОСТИ, определенным в [2], 3.11.
5 Во время прекращения движения приводы не обязательно деактивируются. При определенных условиях приводы могут удерживать ПАЦИЕНТА или конечности ПАЦИЕНТА в устойчивом положении.
2 01.3.204 КЛИНИЧЕСКАЯ ФУНКЦИЯ (CLINICAL FUNCTION): Клинически значимая деятельность, для которой предназначены МЭИ или МЭС, как указано ИЗГОТОВИТЕЛЕМ.
Примечания
1 КЛИНИЧЕСКАЯ ФУНКЦИЯ обычно представляет собой разновидность ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ МЭИ или МЭС и связана с ПАЦИЕНТОМ.
2 В настоящем стандарте под клинически значимой деятельностью понимается:
- подтверждение диагноза ПАЦИЕНТА с НАРУШЕНИЕМ;
- лечение, смягчение или мониторинг НАРУШЕНИЯ у ПАЦИЕНТА.
201.3.205 КОМПЕНСАЦИЯ (COMPENSATION): Облегчение НАРУШЕНИЯ у ПАЦИЕНТА за счет поддержки частей тела или за счет поддержки или замены функций тела.
Примечание — КОМПЕНСАЦИЯ может быть обеспечена, например, ортезами с внешним питанием. К КОМПЕНСАЦИИ не относится улучшение ДВИГАТЕЛЬНЫХ ФУНКЦИЙ, связанных с НАРУШЕНИЕМ, которое относится к РЕАБИЛИТАЦИИ.
201.3.206 МЕДИЦИНСКИЙ РОБОТ (MEDICAL ROBOT): РОБОТ, предназначенный для использования в качестве МЭИ или МЭС.
201.3.207 *
НАРУШЕНИЯ (IMPAIRMENT): Проблемы в функционировании организма или в структуре тела, такие как значительные отклонения или утрата органа(ов) или функции(ий).
[ГОСТ РИ СО 9999—2019, статья 2.11]
Примечания
1 Термин «проблема» в данном определении использован для обозначения (негативного) отклонения от общепринятых в обществе уровней нормальности биомедицинского статуса организма и его функций. Предупреждение о факторах НАРУШЕНИЯ осуществляют в первую очередь лица, уполномоченные оценивать функционирование в соответствии с общепринятыми уровнями нормальности. НАРУШЕНИЕ обычно является следствием болезни или несчастного случая, но также может быть врожденным дефектом.
2 Настоящий стандарт относится только к МЭИ или МЭС, т. е. он относится к НАРУШЕНИЯМ у ПАЦИЕНТА, а не к обычным возрастным НАРУШЕНИЯМ.
2 01.3.208 ОБЛЕГЧЕНИЕ (ALLEVIATION): Терапия для ослабления симптомов, связанных с НАРУШЕНИЕМ у ПАЦИЕНТА.
Примечание — Примером ОБЛЕГЧЕНИЯ является физиотерапия, выполняемая РОБОТОМ РОКО для снижения боли или других вторичных факторов НАРУШЕНИЯ.
2 01.3.209* ОЦЕНКА (ASSESSMENT): Процедура для количественной оценки или помощи в определении степени НАРУШЕНИЯ у ПАЦИЕНТА.
Примечания
1 Термин «ОЦЕНКА» отличен от термина «ОЦЕНКА РИСКА».
2 ОЦЕНКА в данном определении сосредоточена на степени НАРУШЕНИЯ функций и структур тела, а не на ограничениях активности или возможности участия (ГОСТ Р 60.2.2.1—2016, раздел 4).
3 ОЦЕНКУ следует отличать как от измерения, так и от диагностики. Измерение, как правило, связано с измеряемым физиологическим параметром (например, положением руки ПАЦИЕНТА с помощью РОБОТА РОКО) и, как правило, связано с датчиком или является непосредственным выходным сигналом датчика. Затем данные измерения используют для количественной оценки НАРУШЕНИЯ (например, проприоцепция, планирование движения и т. д.). Поскольку НАРУШЕНИЯ представляют собой проявления основной патологии, ОЦЕНКА, количественно определяющая НАРУШЕНИЕ, может быть использована врачом для подтверждения диагноза, который определяет патологию, либо для отслеживания прогрессирующего течения патологии, либо для восстановления после травмы. См. пример в приложении АА.
2 01.3.210*ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ (ACTUATED APPLIED PART): Подкатегория РАБОЧЕЙ ЧАСТИ, предназначенная для обеспечения активно управляемых физических взаимодействий с ПАЦИЕНТОМ, связанных с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ ПАЦИЕНТА, для выполнения КЛИНИЧЕСКОЙ ФУНКЦИИ РОБОТА РОКО.
Примечания
1 «Активно управляемый» означает управление РОБОТОМ РОКО, включая управление совместно с ПАЦИЕНТОМ или ОПЕРАТОРОМ.
2 К активно управляемым физическим взаимодействиям относят управление положением, управление усилием, управление сопротивлением, управление проводимостью или другие средства управления, которые регулируют взаимодействие между РОБОТОМ РОКО и ПАЦИЕНТОМ.
3 Каждая ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ является частью исполнительной системы привода в соответствии с 9.8.1 общего стандарта.
2 01.3.211* РЕАБИЛИТАЦИЯ (REHABILITATION): Терапия, предназначенная для улучшения ДВИГАТЕЛЬНЫХ ФУНКЦИЙ, связанных с НАРУШЕНИЕМ у ПАЦИЕНТА.
Пример — Повторное обучение управлению моторикой верхних или нижних конечностей, восстановление мышечной силы и выносливости.
Примечания
1 РЕАБИЛИТАЦИЮ можно осуществлять в ситуациях, когда ПАЦИЕНТ имеет НАРУШЕНИЕ вследствие несчастного случая, болезни или врожденных патологий (например, церебральный паралич), или применять для замедления ожидаемой утраты функций организма из-за нейродегенеративных заболеваний (например, болезнь Паркинсона, рассеянный склероз).
2 Данное определение отличается от определения Всемирной организации здравоохранения (ВОЗ), охватывая только его часть, чтобы соответствовать области применения настоящего стандарта.
20 1.3.212* РОБОТ (ROBOT): Программируемый исполнительный механизм с определенным уровнем автономности, перемещающийся во внешней среде для выполнения задач по назначению.
20 1.3.213 РОБОТ ДЛЯ РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ И ОБЛЕГЧЕНИЯ; РОБОТ РОКО (REHABILITATION, ASSESSMENT, COMPENSATION AND ALLEVIATION ROBOT; RACA ROBOT): МЕДИЦИНСКИЙ РОБОТ, предназначенный ИЗГОТОВИТЕЛЕМ для осуществления РЕАБИЛИТАЦИИ, ОЦЕНКИ СОСТОЯНИЯ, КОМПЕНСАЦИИ или ОБЛЕГЧЕНИЯ и имеющий ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ.
20 1.3.214* СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ (SITUATION AWARENESS): Восприятие, понимание и прогнозирование ОПЕРАТОРОМ поведения РОБОТА РОКО во внешней среде.
Примечания
1 СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ позволяет ОПЕРАТОРУ РОБОТА РОКО надлежащим образом и своевременно реагировать на поведение РОБОТА РОКО как при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, так и при УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
2 СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ имеет прямую связь с ПРОЦЕССОМ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. Однако ГОСТ Р МЭК 62366-1 трактует СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ, используя понятия «восприятие» и «познание». Дополнительная информация приведена в приложении АА.
20 1.3.215* ШАГАЮЩИЙ (WALKING): ПЕРЕДВИЖНОЕ ИЗДЕЛИЕ, которое после установки и ввода в эксплуатацию предназначено для перемещения из одного места в другое путем совершения возвратно-поступательных движений с периодическим контактом между поверхностью перемещения и РОБОТОМ РОКО.
Пример — Активный экзоскелет для нижних конечностей является примером ШАГАЮЩЕГО РОБОТА РОКО, предназначенного ИЗГОТОВИТЕЛЕМ для передвижения ПАЦИЕНТА.
Примечание — ШАГАЮЩИЙ — это новая подкатегория ТРАНСПОРТИРУЕМЫХ МЭИ и МЭС, как показано на рисунке АА.1.
201.4 Общие требования
Применяют пункт 4 общего стандарта, за исключением нижеприведенного.
201.4.2.3 Оценивание РИСКА
Дополнительные подпункты перед 4.2.3.1
201.4.2.3.101 Общие положения
При выполнении ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА необходимо учитывать уровень автономности РОБОТА РОКО.
Примечания
1 Влияние уровня автономности на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА описано в [3]. Например, РОБОТЫ РОКО могут выполнять задание полностью автономно с меньшим РИСКОМ, чем ОПЕРАТОР, выполняющий то же задание, или наоборот.
2 Уровень автономности может повысить эффективность, добавить функциональные возможности или улучшить ЭКСПЛУАТАЦИОННУЮ ПРИГОДНОСТЬ РОБОТОВ РОКО. Однако более высокий уровень автономности может увеличить сложность системы и, таким образом, может увеличить количество и сложность ОПАСНЫХ СИТУАЦИЙ. ИЗГОТОВИТЕЛЬ должен учитывать эту сложность в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. Поскольку автономность обеспечивают одна или несколько ПЭПС, такие ПЭПС заслуживают особого внимания.
3 Роль ОПЕРАТОРА может различаться в зависимости от его задач и взаимодействия с РОБОТОМ РОКО. СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ ОПЕРАТОРА может стать более важной для РОБОТОВ РОКО с более высоким уровнем автономности.
Соответствие проверяют анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
2 01.4.2.3.102* МЕНЕДЖМЕНТ РИСКА и СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ
ИЗГОТОВИТЕЛЬ в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА должен определить ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, которые могут возникнуть в результате утраты ОПЕРАТОРОМ СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, если для снижения РИСКА до приемлемого уровня необходим ОПЕРАТОР для наблюдения за ходом выполнения задания или для взаимодействия с РОБОТОМ РОКО. ИЗГОТОВИТЕЛЬ должен включить необходимую информацию в ЭКСПЛУАТАЦИОННЫЕ ДОКУМЕНТЫ.
Соответствие проверяют анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, в соответствующих случаях, ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТОВ.
Согласно требованиям ГОСТ Р МЭК 62366-1—2021, 5.5, ОПАСНЫЕ СЦЕНАРИИ ЭКСПЛУАТА-ЦИИ/ПРИМЕНЕНИЯ необходимо оценивать, используя ИТОГОВОЕ ОЦЕНИВАНИЕ. Из-за субъективного характера оценивания СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ вместо этого может оказаться достаточным ФОРМИРУЮЩЕЕ ОЦЕНИВАНИЕ данного ОПАСНОГО СЦЕНАРИЯ ЭКСПЛУАТАЦИИ/ ПРИМЕНЕНИЯ.
Примечание — Дополнительные указания приведены в приложении ВВ.
2 01.4.3 ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ
Дополнение
В таблице 201.101 представлены потенциальные источники неприемлемого РИСКА, соответствующие ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ РОБОТОВ РОКО, и подпункты, в которых установлены требования.
Таблица 201.101 — Перечень потенциальных ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК
Потенциальные ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ | Подпункт |
Движение или усилие/крутящий момент РОБОТА РОКО | 201.12.101 |
Измерение при ОЦЕНКЕ | 201.12.102 |
2 01.4.7* УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ для МЭИ
Дополнение
Примечание — СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ может быть крайне важна для поддержания БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК особенно в ситуации УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ, в частности когда ОПЕРАТОР берет на себя ответственность за выполнение конкретных задач РОБОТА РОКО. Например, для воздействия на восприятие ОПЕРАТОРА можно использовать два средства предупреждения (например, световое и звуковое) для того, чтобы гарантировать, что МЭИ является БЕЗОПАСНЫМ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ.
201.5 Общие требования к испытаниям МЭИ
Применяют пункт 5 общего стандарта, за исключением нижеприведенного.
201.5.9.1 РАБОЧИЕ ЧАСТИ
Дополнительный подпункт
201.5.9.1.101 ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ
ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ идентифицируют осмотром и сведения о них приводят в ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТАХ.
201.6 Классификация МЭИ и МЭС
Применяют пункт 6 общего стандарта.
201.7 Идентификация, маркировка и документация МЭИ
Применяют пункт 7 общего стандарта, за исключением нижеприведенного.
201.7 .2.4 ПРИНАДЛЕЖНОСТИ
Замена
Если следствием неправильной идентификации ПРИНАДЛЕЖНОСТЕЙ является неприемлемый РИСК, то ИЗГОТОВИТЕЛЬ должен выполнить требования ГОСТ ISO 14971—2021, 7.1, с учетом установленных приоритетов для УПРАВЛЕНИЯ РИСКОМ.
ПРИНАДЛЕЖНОСТИ должны быть маркированы согласно ПРОЦЕССУ МЕНЕДЖМЕНТА РИСКА, по крайней мере, с указанием следующей информации:
- наименование или товарный знак ИЗГОТОВИТЕЛЯ;
- ОБОЗНАЧЕНИЕ МОДЕЛИ ИЛИ ТИПА;
- серийный номер или код партии, при необходимости;
- дата изготовления или срок годности, при необходимости.
Примечания
1 В ГОСТ Р ИСО 15223-1 приведена информация о символах, применяемых для обозначения ИЗГОТОВИТЕЛЯ, серийного номера, кода партии, даты изготовления и срока годности.
2 Серийный номер, код партии и дата изготовления могут быть представлены в виде воспринимаемого человеком кода, или с помощью технологии автоматической идентификации, такой как штрихкоды или радиочастотная идентификация.
Если маркировка ПРИНАДЛЕЖНОСТЕЙ невозможна, то она может быть нанесена на индивидуальную упаковку.
2 01.7.9.2.5 Описание МЭИ
Дополнение к перечислениям в первом абзаце
- достаточно полное описание функций, обладающих определенным уровнем автономности (включая ПРОЦЕДУРУ запуска, ПРОЦЕДУРУ перезапуска, ПРОЦЕДУРУ останова и техническое обслуживание), необходимое для адекватной СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРОВ.
201.7.9.2.9 Инструкции по эксплуатации
Дополнение в конце первого абзаца
Кроме того, должна быть приведена информация, полученная в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, которая относится к СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ (определена в 201.4.2.3.102).
201.7.9.3.1 Общие положения
Дополнение к перечислениям в первом абзаце
- описание функций, обладающих уровнем автономности, которые могут создать ОПАСНУЮ СИТУАЦИЮ, например для ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА.
201.8 Защита от ОПАСНОСТЕЙ поражения электрическим током
Применяют пункт 8 общего стандарта, за исключением нижеприведенного.
201.8 .3 Классификация РАБОЧИХ ЧАСТЕЙ
Дополнение
Примечание 101 — ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ классифицируют так же, как РАБОЧИЕ ЧАСТИ, т. е. относят к типу CF, BF или В.
201.9 Защита от МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, создаваемых МЭИ и МЭС
Применяют пункт 9 общего стандарта, за исключением нижеприведенного.
201.9.1 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, создаваемые МЭИ
Таблица 19 — Виды МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, на которые распространяются требования данного пункта
Дополнение
ОПАСНОСТЬ неточного совмещения | 201.9.101 |
201.9.2 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с движущимися частями
201.9.2.1 Общие положения
Дополнение
РОБОТ РОКО, особенно если он является НОСИМЫМ НА ТЕЛЕ или ШАГАЮЩИМ, может перемещаться во внешней среде и контактировать с расположенными в ней объектами, такими как стены, разные поверхности для ходьбы, стулья или столы, в процессе ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ. При необходимости ИЗГОТОВИТЕЛЬ должен учитывать эти аспекты в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. При необходимости для снижения РИСКОВ должна быть предоставлена информация по безопасности.
Примечание 101 — ГОСТ Р 60.2.2.1—2016, 5.10.8, может быть полезным для ИЗГОТОВИТЕЛЯ при рассмотрении мер по УПРАВЛЕНИЮ РИСКОМ (ГОСТР 60.2.2.1 определяет УПРАВЛЕНИЕ РИСКОМ как снижение РИСКА), связанных со столкновением с объектами во внешней среде (в ГОСТР 60.2.2.1 использован термин «препятствия, связанные с безопасностью»).
Для ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ РОБОТЫ РОКО перемещают одну или несколько частей тела ПАЦИЕНТА, поэтому в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА следует рассматривать разные процедуры останова (см. таблицу 201.102). включая процедуры автоматического останова.
Таблица 201.102 — Обзор разных процедур останова
Функция | АВАРИЙНЫЙ ОСТАНОВ | ЗАЩИТНЫЙ ОСТАНОВ | Нормальный останов |
Ситуация | Авария | Нештатная ситуация | Планируемое действие |
Инициирование | Ручное | Автоматическое | Ручное или автоматическое |
Требования | Должен соответствовать 201.9.2.4 | Должен соответствовать 201.9.2.101 | Зависит от конструкции |
Перезапуск | Ручной | Ручной или автоматический | Не применимо |
Частота использования | Редко | От частого до редкого | Всегда |
Намеченный эффект | Немедленно остановить ОПАСНУЮ СИТУАЦИЮ | Управление РИСКОМ до приемлемого уровня | Перерыв в работе |
201.9.2.2 .1 Общие положения
Дополнение
Для РОБОТОВ РОКО, которые контактируют с объектами внешней среды при ПРЕДУСМОТРЕННОМ ПРИМЕНЕНИИ, пространство между РОБОТОМ РОКО и его внешней средой может быть недопустимо считать ЗОНОЙ ЗАХВАТА. Данную ситуацию необходимо оценить в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
201.9.2.3 Прочие МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с движущимися частями
201.9.2.3.1 * Непреднамеренное движение
Замена и дополнительные подпункты
201.9.2.3.1.101 Непреднамеренное движение, связанное с органами управления
Органы управления должны быть расположены, утоплены или защищены другими средствами так, чтобы их невозможно было случайно активировать, за исключением случаев, когда в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ предусмотрено иное для намеченного ПАЦИЕНТА (например, для ПАЦИЕНТА с особыми потребностями) или когда их активация не приводит к неприемлемому РИСКУ.
Примечание — Органы управления представляют собой ПОЛЬЗОВАТЕЛЬСКИЕ ИНТЕРФЕЙСЫ на устройствах управления, приводимые в действие ОПЕРАТОРОМ, например переключатели, джойстики, сенсорные панели (включая интеллектуальные устройства), кодонабиратели или кнопки.
Соответствие проверяют осмотром МЭИ и, если орган управления является частью ОСНОВНЫХ РАБОЧИХ ФУНКЦИЙ, анализом ФАЙЛА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
201.9.2.3.1.102 * Непреднамеренное движение, связанное с совместным управлением со стороны ПАЦИЕНТА, ОПЕРАТОРА или РОБОТА РОКО
ИЗГОТОВИТЕЛЬ должен идентифицировать непреднамеренное или неожиданное движение или усилие/крутящий момент, связанные с совместным управлением со стороны ПАЦИЕНТА, ОПЕРАТОРА или РОБОТА РОКО, и рассмотреть их в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. При неприемлемом РИСКЕ должны быть реализованы дополнительные средства УПРАВЛЕНИЯ РИСКОМ.
Если управление движением РОБОТА РОКО осуществляется в соответствии с физиологическими сигналами [например, сигналами электромиографии (ЭМГ), электрокардиографии (ЭКГ) или электроэнцефалографии (ЭЭГ)], связанными с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ ПАЦИЕНТА, то это должно быть предусмотрено в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. Если управление движением реализовано через ПЭПС, то применяют пункт 14 общего стандарта.
Примечание — Непреднамеренные движения, связанные с совместным управлением, могут иметь место во время нормальной работы РОБОТОВ РОКО, поскольку движение РОБОТА РОКО, как правило, является результатом возможности ПАЦИЕНТА, намерений ОПЕРАТОРА, намерений ПАЦИЕНТА к движению и системы управления РОБОТА РОКО. Непреднамеренное движение может быть неожиданным для ОПЕРАТОРА или других людей вокруг.
Соответствие проверяют путем анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.9.2.3.1.103 Непреднамеренное движение, связанное с неожиданным выбросом энергии
ИЗГОТОВИТЕЛЬ должен рассмотреть непреднамеренное движение, связанное с неожиданным выбросом энергии, в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА; в случае неприемлемого РИСКА необходимо реализовать дополнительные средства УПРАВЛЕНИЯ РИСКОМ.
Примечание — Примерами источников энергии являются пружины, баллоны под давлением (гидравлические или пневматические), противовесы, маховики. Накопленная электрическая энергия при разряде может через привод привести к непреднамеренному движению.
Соответствие проверяют осмотром МЭИ и анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.9.2.3.1.104 Непреднамеренное движение, связанное с запуском, перезапуском или нормальным остановом
Непреднамеренное движение РОБОТОВ РОКО может произойти в момент или непосредственно после запуска, перезапуска или процедуры нормального останова.
ИЗГОТОВИТЕЛЬ должен рассмотреть такое непреднамеренное движение в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. В случае неприемлемого РИСКА необходимо реализовать дополнительные средства УПРАВЛЕНИЯ РИСКОМ.
Примечание — Примерами непреднамеренных движений, связанных с запуском или перезапуском, являются внезапные и быстрые движения, вызванные внутренними состояниями программного обеспечения, оставшимися от предыдущей работы.
Соответствие проверяют осмотром МЭИ и анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.9.2.3.1.105 Непреднамеренное движение, связанное с ЗАЩИТНЫМ ОСТАНОВОМ
В результате ЗАЩИТНОГО ОСТАНОВА может произойти непреднамеренное движение. ИЗГОТОВИТЕЛЬ должен рассмотреть данное непреднамеренное движение в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. В случае неприемлемого РИСКА необходимо реализовать дополнительные средства УПРАВЛЕНИЯ РИСКОМ.
Примечание — Примером непреднамеренного движения, связанного с ЗАЩИТНЫМ ОСТАНОВОМ, является неожиданное движение из-за силы тяжести или инерции после внезапного отключения питания или утраты опоры.
Соответствие проверяют осмотром МЭИ и анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.9.2.3.2 Ограничители избыточного хода
Дополнение
Если ПАЦИЕНТ прикладывает усилие при движении, то применяют строку 4 таблицы 33 общего стандарта.
Если РОБОТ РОКО имеет разные режимы управления, необходимо рассмотреть сценарий испытаний в наиболее неблагоприятных условиях.
Дополнительный подпункт
201.9.2.3.101 Выход за пределы установленного диапазона для отдельного движения ПАЦИЕНТА
В ходе АНАЛИЗА РИСКОВ ИЗГОТОВИТЕЛЬ должен рассмотреть ОПАСНОСТИ, связанные с выходом за пределы установленного диапазона для отдельного движения ПАЦИЕНТА.
Примечание — Для снижения РИСКА до приемлемого уровня ИЗГОТОВИТЕЛЬ может рассмотреть следующие меры по УПРАВЛЕНИЮ РИСКОМ:
- ограничение движения РОБОТА РОКО, чтобы не нарушались установленные пределы (например, по положению, углу, скорости, ускорению, замедлению и рывкам);
- ограничение выходного усилия или крутящего момента, чтобы они не превышали предварительно установленных пределов по усилию или крутящему моменту.
Данные меры по УПРАВЛЕНИЮ РИСКОМ могут быть реализованы с помощью механических и/ или электрических средств или с помощью ПЭПС и могут настраиваться ОПЕРАТОРОМ.
Соответствие проверяют анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА и проведением следующих испытаний:
- функциональных испытаний, если мера по УПРАВЛЕНИЮ РИСКОМ ограничивает выходное усилие или крутящий момент;
- испытаний, определенных в 201.9.2.3.2, если мера по УПРАВЛЕНИЮ РИСКОМ ограничивает перемещение.
Может потребоваться предварительное задание ОПЕРАТОРОМ конкретных ограничений на движения РОБОТА РОКО для каждого сеанса обучения или для каждого ПАЦИЕНТА с учетом возможностей, ограничений и прогресса ДВИГАТЕЛЬНЫХ ФУНКЦИЙ каждого ПАЦИЕНТА.
Примечание — Если выход за заданные пределы диапазона перемещения приводит к неприемлемому РИСКУ, то для обеспечения БЕЗОПАСНОСТИ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ реализация данных мер по УПРАВЛЕНИЮ РИСКОМ может либо соответствовать требованиям к КОМПОНЕНТАМ С ВЫСОКОЙ СТЕПЕНЬЮ НАДЕЖНОСТИ для всех задействованных компонентов, либо представлять собой два независимых контура управления.
201.9.2.4 Устройства аварийной остановки
Дополнение
Если РОБОТ РОКО предназначен для использования с ограниченным контролем или без контроля и именно ПАЦИЕНТ должен активировать АВАРИЙНЫЙ ОСТАНОВ, то ПАЦИЕНТ является ОПЕРАТОРОМ устройства аварийного останова. На основании ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА ИЗГОТОВИТЕЛЬ должен представить надлежащую информацию в ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТАХ. Данная информация должна включать требования, касающиеся способности ПАЦИЕНТА управлять АВАРИЙНЫМ ОСТАНОВОМ, а также достаточные инструкции по обучению ПАЦИЕНТА для обеспечения надлежащей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
Соответствие проверяют анализом ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТОВ и ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.9.2.5 Освобождение ПАЦИЕНТА от креплений
Дополнение к перечислению в первом абзаце
- когда РОБОТ РОКО останавливает движение ПАЦИЕНТА, это может привести к ОПАСНОЙ СИТУАЦИИ для ПАЦИЕНТА. Например, если освобождение ПАЦИЕНТА невозможно в течение ограниченного периода времени, то это может привести к ОПАСНОЙ СИТУАЦИИ. Поэтому в некоторых случаях может потребоваться, чтобы РОБОТ РОКО или его части можно было вручную перемещать в выключенном состоянии, чтобы освободить ПАЦИЕНТА от креплений.
В ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА особое внимание должно быть уделено следующим факторам:
- ограниченные возможности ПАЦИЕНТА из-за НАРУШЕНИЯ или потери сознания;
- ограниченная доступность ОПЕРАТОРА или его отсутствие;
- СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ;
- ПАЦИЕНТ может выступать в роли ОПЕРАТОРА;
- РОБОТА РОКО допускается использовать для ОКАЗАНИЯ МЕДИЦИНСКОЙ ПОМОЩИ ВНЕ МЕДИЦИНСКОЙ ОРГАНИЗАЦИИ (см. [4]). В этом случае НЕКВАЛИФИЦИРОВАННОЕ лицо может быть не в состоянии освободить ПАЦИЕНТА от креплений РОБОТА РОКО;
- может потребоваться более одного ОПЕРАТОРА, чтобы освободить ПАЦИЕНТА от креплений РОБОТА РОКО.
Дополнительный подпункт
201.9.2.101 Функции ЗАЩИТНОГО ОСТАНОВА
При необходимости иметь одну или несколько функций ЗАЩИТНОГО ОСТАНОВА они должны соответствовать всем следующим требованиям:
- снижать РИСК до приемлемого уровня;
- автоматически инициироваться от ПЭМС/ПЭПС;
- соответствовать пункту 14 общего стандарта (ПЭМС) при необходимости.
Перезапуск должен инициировать ОПЕРАТОР вручную, за исключением случаев, когда автоматический перезапуск с помощью ПЭМС/ПЭПС не приводит к неприемлемому РИСКУ.
ЗАЩИТНЫЙ ОСТАНОВ может требовать сохранения подачи питания, чтобы снизить РИСК до приемлемого уровня.
Соответствие проверяют осмотром МЭИ, анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА и функциональными испытаниями.
201.9.3 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с поверхностями, углами и кромками
Дополнение
Примечание — Шероховатая поверхность, острые углы и кромки также могут встречаться в текстильных изделиях и гибких компонентах, таких как манжеты, ремни или лямки.
201.9.8 * МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с опорными системами
201.9.8.1 Общие положения
Замена первого элемента перечисления
- конструкция опорных, подвесных систем или системы приведения в действие должна быть разработана на основе 201.9.8.2 и ПОЛНОЙ НАГРУЗКИ каждой опорной, подвесной системы или системы приведения в действие.
Дополнение к перечислению в первом абзаце
- если ОЦЕНКА РИСКА для РОБОТОВ РОКО, выполняющих повторяющиеся движения своих ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ, указала на неприемлемый РИСК из-за преждевременного отказа в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ, то реализованные МЕРЫ ПО УПРАВЛЕНИЮ РИСКОМ должны быть подтверждены надлежащими испытаниями на усталостную прочность или долговечность.
Примечание — Описание примеров, показывающих опорные, подвесные системы или системы приведения в действие в РОБОТАХ РОКО, представлено в приложении АА, 201.9.8. Данные примеры дают ИЗГОТОВИТЕЛЯМ РОБОТОВ РОКО разъяснение того, какие типы опорных, подвесных систем или систем приведения в действие существуют и как определить их ПОЛНУЮ НАГРУЗКУ.
Соответствие проверяют осмотром МЭИ и анализом проектной документации и ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
Дополнение
Опорные системы РОБОТА РОКО могут включать опорные, подвесные системы и системы приведения в действие, а также ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ РОБОТА РОКО, которые по определению являются частью системы приведения в действие. РОБОТ РОКО также может быть опорной системой (например, см. приложение АА, 201.9.8, пример 6). РОБОТ РОКО может содержать несколько разных опорных систем, подвесных систем или систем приведения в действие, каждая из которых может иметь разную ОБЩУЮ НАГРУЗКУ. ИЗГОТОВИТЕЛЬ должен определить и оценить каждую из них в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Примечание 101 — Дополнительные пояснения относительно опорных систем, подвесных систем или систем приведения в действие представлены в приложении АА, 201.9.8.
Если отказ опорной системы приводит к неприемлемому РИСКУ, то конструктивная прочность опорных систем должна соответствовать КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ из таблицы 21 общего стандарта. ИЗГОТОВИТЕЛЬ должен определить соответствующую ПОЛНУЮ НАГРУЗКУ для каждой части каждой опорной системы, подвесной системы или системы приведения в действие.
Примечания
102 Выбор случая А или В, приведенного в таблице 21 общего стандарта, зависит не только от определения ПОЛНОЙ НАГРУЗКИ, но также от знания ПРЕДЕЛА ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала. См. сноски к таблице 21 общего стандарта. Случай А предполагает, что ОБЩАЯ НАГРУЗКА и ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала должны быть известны. Если любое из этих значений является неопределенным, применяют случай В, приведенный в таблице 21.
103 Типичная ОПАСНОСТЬ для ПАЦИЕНТА, поддерживаемого опорной или подвесной системой, — потеря равновесия и падение непосредственно после механического отказа опорной или подвесной системы.
104 Опорная или подвесная система может служить средством поддержания положения или позы ПАЦИЕНТА в противовес силе тяжести.
105 В поддержку ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА могут быть выполнены ТИПОВЫЕ ИСПЫТАНИЯ с использованием надлежащего оборудования для испытаний человеческого тела (пример распределения массы человеческого тела приведен на рисунке А.19 общего стандарта).
201 .9.8.2 КОЭФФИЦИЕНТ БЕЗОПАСНОСТИ
Дополнение после первого абзаца
Примечания
101 Опорные системы РОБОТОВ РОКО включают опорные, подвесные системы и системы приведения в действие, а также ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ РОБОТА РОКО, которые по определению являются частью системы приведения в действие.
102 При обеспечении требований к прочности конструкции выбор случая А или В, приведенного в таблице 21 общего стандарта, зависит не только от определения ПОЛНОЙ НАГРУЗКИ, но также от знания ПРЕДЕЛА ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала. См. сноски к таблице 21 общего стандарта. Случай А предполагает, что ПОЛНАЯ НАГРУЗКА и ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала должны быть известны. Если любое из этих значений является неопределенным, применяют случай В, приведенный в таблице 21.
103 Альтернативные методы доказательства прочности конструкции в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ могут включать испытание на усталостную прочность или использование КОМПОНЕНТОВ С ВЫСОКОЙ СТЕПЕНЬЮ НАДЕЖНОСТИ.
Замена двух последних абзацев, исключая примечания, после таблицы 21
Соответствие 201.9.8.1 и 201.9.8.2 проверяют осмотром МЭИ и анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, при необходимости, испытаниями в сочетании со следующими требованиями:
- конструкция опорной, подвесной системы или системы приведения в действие;
- технические характеристики и описание используемых материалов;
- технические условия обработки материалов;
- подтверждающие расчеты/спецификации для ПОЛНОЙ НАГРУЗКИ в соответствии с приложением АА;
- при необходимости, с помощью испытаний, позволяющих продемонстрировать, что указанные ИЗГОТОВИТЕЛЕМ ограничения соблюдаются.
Испытательную нагрузку, равную ПОЛНОЙ НАГРУЗКЕ, умноженной на требуемый ЗАПАС ПРОЧНОСТИ НА РАСТЯЖЕНИЕ, постепенно прикладывают к испытуемому узлу опоры. Испытуемый узел опоры должен быть в равновесии через 1 мин, а в случае отказа не должен приводить к неприемлемому РИСКУ.
201.9.8.3.1 Общие положения
Дополнение
Примечания
1 Подпункт 9.8.3 общего стандарта применяют только к опорным или подвесным системам, поддерживающим полную массу тела ПАЦИЕНТА или ОПЕРАТОРА. Примеры и обоснование приведены в 9.8.3.3 приложения А общего стандарта.
2 Если РОБОТ РОКО предназначен для использования с подъемником или подъемным устройством, то ГОСТ Р ИСО 10535 содержит дополнительные указания относительно ОПАСНОСТЕЙ, не рассматриваемых в стандартах под общим наименованием «Изделия медицинские электрические».
3 В приложении АА, 201.9.8, приведены примеры применения данного подпункта к разным типам РОБОТОВ РОКО.
Дополнительный подпункт
2 01.9.101 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с неточным совмещением
ОПАСНОСТИ, связанные с неточным совмещением ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ с ПАЦИЕНТОМ, необходимо рассматривать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Соответствие проверяют анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.10 Защита от ОПАСНОСТЕЙ воздействия нежелательного или чрезмерного излучения
Применяют пункт 10 общего стандарта.
201.11 Защита от чрезмерных температур и других ОПАСНОСТЕЙ
Применяют пункт 11 общего стандарта.
201.12 Точность органов управления и измерительных приборов и защита от опасных значений выходных характеристик
Применяют пункт 12 общего стандарта, за исключением нижеприведенного.
Дополнительные подпункты
201.12.101 Движение или усилие/крутящий момент РОБОТА РОКО
ИЗГОТОВИТЕЛЬ с помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА должен определить прогнозируемые ОПАСНОСТИ, связанные с потерей или ухудшением движений или усилия/крутящего момента ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ РОБОТА РОКО. Если движение или усилие/крутящий момент являются КЛИНИЧЕСКОЙ ФУНКЦИЕЙ, то ИЗГОТОВИТЕЛЬ должен определить предельные технические характеристики с учетом как НОРМАЛЬНЫХ УСЛОВИЙ, так и УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ. Если характеристики движения или усилия/крутящего момента, выходящие за пределы предельных технических характеристик, приводят к неприемлемому РИСКУ, то движение или усилие/крутящий момент являются ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ. В этом случае ИЗГОТОВИТЕЛЬ должен принять меры по УПРАВЛЕНИЮ РИСКОМ для снижения РИСКА до приемлемого уровня.
Примечание — Характеристики движения или усилия/крутящего момента могут зависеть от многих факторов, таких как пространственная координация, синхронизация, скорость, устойчивость, диапазон, давление, посадка/несоосность, установка и другие факторы.
Соответствие проверяют анализом проектной документации/предельных технических характеристик, ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТОВ, ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, при необходимости, функциональными испытаниями.
201.12.102 Измерение при ОЦЕНКЕ
ИЗГОТОВИТЕЛЬ с помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА должен определить прогнозируемые ОПАСНОСТИ, связанные с потерей или ухудшением измерений при ОЦЕНКЕ РОБОТОМ РОКО. Если измерение при ОЦЕНКЕ является КЛИНИЧЕСКОЙ ФУНКЦИЕЙ, то ИЗГОТОВИТЕЛЬ должен определить предельные технические характеристики с учетом как НОРМАЛЬНОГО СОСТОЯНИЯ, так и УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ. Если потеря или ухудшение измерения при ОЦЕНКЕ приводит к неприемлемому РИСКУ, то измерение при ОЦЕНКЕ является ОСНОВНОЙ ФУНКЦИОНАЛЬНОЙ ХАРАКТЕРИСТИКОЙ. В этом случае ИЗГОТОВИТЕЛЬ должен принять меры по УПРАВЛЕНИЮ РИСКОМ для снижения РИСКА до приемлемого уровня.
Соответствие проверяют анализом проектной документации/предельных технических характеристик, ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТОВ, ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, при необходимости, функциональными испытаниями.
201.13 ОПАСНЫЕ СИТУАЦИИ и условия нарушения для МЭИ
Применяют пункт 13 общего стандарта, за исключением нижеприведенного.
201.13.2 УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ
Дополнительный подпункт
2 01.13.2.101 Выход из строя частей, который может привести к утрате СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
Требования, относящиеся к частям, которые могут привести к утрате СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, установлены в 201.4.2.3.102.
Примечания
1 Как правило, данные части могут влиять на восприятие и/или понимание ОПЕРАТОРА и будут влиять на его СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ. Например, части, связанные со звуковой/визуальной/тактильной обратной связью, предоставляемой ОПЕРАТОРУ.
2 Не во всех случаях временной утраты СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ существует прямая связь между неисправной частью и БЕЗОПАСНОСТЬЮ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК. Например, если монитор, отображающий информацию о состоянии РОБОТА РОКО, выйдет из строя, то ОПЕРАТОР сможет легко обнаружить эту недостающую информацию визуально и соответствующим образом отреагировать на ситуацию.
2 01.14 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ
Применяют пункт 14 общего стандарта.
2 01.15 Конструкция МЭИ
Применяют пункт 15 общего стандарта, за исключением нижеприведенного.
201.15 .1 Расположение органов управления и индикаторов в МЭИ
Дополнение
Примечание — ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ органов управления и индикаторов может существенно влиять на СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
201.15.3.1* Общие положения
Таблица 28 — Применяемость испытаний на механическую прочность Дополнение
Тип МЭИ | ПРОВОДИМЫЕ ВИДЫ ИСПЫТАНИЙ |
ШАГАЮЩЕЕ | Давлением (15.3.2) |
Ударом (15.3.3) | |
На падение (201.15.3.4.101) | |
На влияние остаточных механических напряжений (15.3.6) | |
Опрокидыванием (201.15.3.101) |
201.15.3.4 Испытание на падение
Дополнительные подпункты
201.15.3.4.101 ШАГАЮЩИЙ РОБОТ РОКО
ШАГАЮЩИЙ РОБОТ РОКО, ПРИНАДЛЕЖНОСТИ и детали должны выдерживать нагрузку, вызванную свободным падением на твердую поверхность с высоты, указанной в таблице 29 общего стандарта.
Соответствие проверяют следующими испытаниями.
Испытуемый образец поднимают без какой-либо нагрузки над плитой из твердого дерева толщиной (50 ± 5) мм (плотностью более 600 кг/м3), уложенной на бетонное или любое другое прочное основание, на высоту, указанную в таблице 29 общего стандарта. Образец роняют три раза из разных положений, которые, как правило, используют во время транспортирования без нагрузки при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, при этом все фиксируемые части должны быть закреплены в соответствии с инструкциями по применению. После испытания любое повреждение, приводящее к неприемлемому РИСКУ, считается отказом/выходом из строя, то есть отрицательным результатом данного испытания.
201.15.3.101 Испытание опрокидыванием для ШАГАЮЩЕГО РОБОТА РОКО
Опрокидывание ШАГАЮЩЕГО РОБОТА РОКО при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ не должно приводить к потере БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК.
Соответствие проверяют анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, при необходимости, функциональными испытаниями.
Примечания
1 Опрокидывание означает потерю равновесия и падение из любого положения при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Примером опрокидывания может быть ШАГАЮЩИЙ РОБОТ РОКО, стоящий в положении для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, затем наклоняющийся до положения неустойчивости, а затем свободно падающий из этого положения на землю.
2 Одним из способов решения данной проблемы является реализация мер по УПРАВЛЕНИЮ РИСКОМ для предотвращения опрокидывания ШАГАЮЩЕГО РОБОТА РОКО при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ.
2 01.15.4.3 Батареи и аккумуляторы
Дополнительный подпункт перед 15.4.3.1 общего стандарта
2 01.15.4.3.101 Общие положения
В дополнение к требованиям 15.4.3 общего стандарта нелитиевые аккумуляторные батареи должны соответствовать применимому стандарту на компоненты МЭК или ИСО для данного типа батареи в соответствии с принципами, изложенными в 4.8 и на рисунке 5 общего стандарта. ОПАСНОСТИ, связанные с аккумуляторными технологиями, не охваченными каким-либо применимым стандартом на компоненты МЭК или ИСО, необходимо рассматривать в соответствии с 4.2.3.2 общего стандарта.
Соответствие проверяют анализом проектной документации на аккумуляторную батарею или проведением испытаний, указанных в применимых стандартах на компоненты МЭК или ИСО, и, если применимо, анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
2 01.15.4.5 Предварительные уставки органов управления
Дополнение
Примечания
1 Данный подпункт относится к РИСКАМ, связанным с регулируемыми вручную аппаратными уставками органов управления, которые не полностью рассмотрены в других пунктах общего стандарта (например, в пункте 12).
2 РИСКИ, связанные с программными предварительными уставками, рассмотрены в других частях общего стандарта (например, в пункте 12 или 14).
Дополнительный подпункт
2 01.15.4.101 Беспроводные РУЧНЫЕ устройства управления и устройства управления с ножным приводом
Т ребования 15.4.7 общего стандарта применимы к беспроводным РУЧНЫМ устройствам управления и устройствам управления с ножным приводом.
201.16 МЭС
Применяют пункт 16 общего стандарта.
201.17 ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ МЭИ и МЭС
Применяют пункт 17 общего стандарта, за исключением нижеприведенного.
Дополнение
Примечание — Дополнительная информация приведена в пункте 202.
202 ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ. Требования и испытания
Применяют ГОСТ Р МЭК 60601-1-2, за исключением нижеприведенного.
202.4.3* Общие условия проведения испытаний
202.4.3.1 Конфигурации
Дополнение
ИЗГОТОВИТЕЛЬ должен рассмотреть УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ и отразить его в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. Однако для испытаний на ЭМС требования УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ общего стандарта не применяют.
206 ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ
Применяют ГОСТ Р МЭК 60601-1-6, за исключением нижеприведенного.
206.4.2 ПРОЦЕСС ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ для МЭИ
Замена
В первом абзаце ГОСТ Р МЭК 62366, включая соответствующее примечание, заменен на действующий ГОСТ Р МЭК 62366-1.
Во втором абзаце ГОСТ Р МЭК 62366 заменен на действующий ГОСТ Р МЭК 62366-1.
206.5 Замена требований, установленных в ГОСТ Р МЭК 62366-1
Замена
В дополнение к требованиям ГОСТ Р МЭК 62366-1 необходимо применять следующие положения.
Инструкции по применению должны включать краткое описание МЭИ, его физических принципов работы и существенных физических и рабочих характеристик, относящихся к его ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. Данная информация должна быть включена и в техническое описание, если оно предоставлено в виде отдельного документа.
Примечание — Важной целью такого описания является помощь ОПЕРАТОРУ в получении надлежащей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в отношении МЭИ.
Инструкции по применению должны содержать краткое изложение технических условий на применение.
Дополнение к ГОСТ Р МЭК 62366-1—2021, 3.21
Примечание 101 — ОШИБКИ ПРИМЕНЕНИЯ могут возникать из-за утраты или отсутствия СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА.
Дополнение во второй абзац ГОСТ Р МЭК 62366-1—2021, 5.2, после первого предложения
Данная идентификация должна включать рассмотрение обоснованно прогнозируемой утраты или отсутствия СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА как источника ОШИБКИ ПРИМЕНЕНИЯ.
Дополнение к ГОСТ Р МЭК 62366-1—2021, 5.2
Примечание 101 — ОШИБКИ ПРИМЕНЕНИЯ могут возникать по-разному и с разной вероятностью проявления в зависимости от уровня или состояния СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА.
Дополнение после примечания 2 ГОСТ Р МЭК 62366-1, 5.3
Примечание 101 — Применение концепции СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ может сделать идентификацию ОПАСНОСТЕЙ или ОПАСНЫХ СИТУАЦИЙ более тщательной.
Дополнение после примечания 1 ГОСТ Р МЭК 62366-1, 5.7.1
Примечание 101 — Примеры методов оценки надлежащей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ приведены в приложении ВВ.
208* Общие требования, испытания и руководящие указания по применению систем сигнализации МЭИ и МЭС
Применяют ГОСТ IEC 60601-1-8, за исключением нижеприведенного.
Дополнение
Примечание — Дополнительная информация приведена в приложении АА, пункт 208.
Приложения Применяют приложения общего стандарта, за исключением нижеприведенного.
Приложение А (справочное)
Общие положения и обоснования
А.1 Общие положения
Дополнение
Требования к РОБОТАМ РОКО отличаются от требований к другим МЭИ и МЭС, поскольку РОБОТЫ РОКО обладают определенным уровнем автономности и могут:
а) быть носимыми;
б) перемещать ПАЦИЕНТА во внешней среде из одного места в другое;
в) иметь очень тесный контакт с ПАЦИЕНТОМ в течение длительного периода времени;
г) непрерывно перемещать части тела ПАЦИЕНТА;
6} обмениваться (кинетической или потенциальной) энергией с ПАЦИЕНТОМ или передавать на него усилия;
е) управлять разными уровнями взаимодействия между ПАЦИЕНТОМ и РОБОТОМ РОКО;
ж) иметь необходимость в обработке комбинированных сенсорных сигналов от ПАЦИЕНТА для осуществления физического интерактивного управления.
Сочетание нескольких из этих аспектов делает РОБОТЫ РОКО уникальными.
Приложение АА (справочное)
Частные положения и обоснования
АА.1 Общие положения
Приложение АА содержит краткое обоснование важных требований настоящего стандарта и предназначено для тех, кто знаком с предметом настоящего стандарта, но не участвовал в его разработке. Понимание причин основных требований считается важным для надлежащего применения настоящего стандарта. Кроме того, считается, что по мере изменения клинической практики и технологий обоснование настоящих требований облегчит любой пересмотр настоящего стандарта, который потребуется в связи сданными изменениями.
АА.2 Обоснование отдельных пунктов и подпунктов
Ниже приведены обоснования для конкретных пунктов и подпунктов настоящего стандарта, пронумерованные в соответствии с основной частью настоящего стандарта.
201.3.63 МЭИ
Рисунок А.20 общего стандарта поясняет отношения между РУЧНЫМИ, ПЕРЕНОСНЫМИ, ПЕРЕДВИЖНЫМИ и ТРАНСПОРТИРУЕМЫМИ МЭИ. Однако на нем отсутствует категория ШАГАЮЩИХ МЭИ. Рисунок АА.1 исправляет данную ситуацию.
СТАЦИОНАРНЫЕ Термин, означающий изделия, которые после установки и ввода в
эксплуатацию не предназначены для перемещения с одного места на другое (3.118)
ТРАНСПОРТИРУЕМЫЕ
Термин, означающий изделия, которые после установки и ввода в эксплуатацию предназначены для перемещения из одного места в другое, независимо от того, подключены они к источнику питания или нет, и без существенного ограничения радиуса действия (3.130)
ЗАКРЕПЛЕННЫЕ Термин, означающий зафиксированные или иным образом закрепленные в определенном месте изделия либо постоянно, либо так, что их можно отсоединить только с помощью ИНСТРУМЕНТА (3.30)
ПЕРЕНОСНЫЕ
Термин, означающий ТРАНСПОРТИРУЕМЫЕ ИЗДЕЛИЯ, которые после установки и ввода в эксплуатацию предназначены для перемещения из одного места в другое посредством переноски одним или несколькими лицами (3.85)
ПЕРЕДВИЖНЫЕ Термин, означающий ТРАНСПОРТИРУЕМЫЕ ИЗДЕЛИЯ, которые после установки и ввода в эксплуатацию предназначены для перемещения из одного места в другое при помощи собственных колес или аналогичных средств (3.65).
НОСИМЫЕ НА ТЕЛЕ ПЕРЕНОСНЫЕ ИЗДЕЛИЯ, ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ которых включает в себя работу при ношении ПАЦИЕНТОМ или прикреплении к одежде ПАЦИЕНТА (201.3.144)
ШАГАЮЩИЕ ПЕРЕДВИЖНЫЕ ИЗДЕЛИЯ, которые после установки и ввода в эксплуатацию предназначены для поддержки передвижения ПАЦИЕНТА или для перемещения из одного места в другое путем совершения возвратно-поступательного движения при периодическом контакте между поверхностью перемещения и РОБОТОМ РОКО (201.3.215)
РУЧНЫЕ
Термин, означающий изделия, которые после установки и ввода в эксплуатацию предназначены для поддержки рукой
(3.37)
Рисунок АА.1 — Связь между терминами, используемыми для описания изделий, принадлежностей или частей оборудования
201.3.144 НОСИМОЕ НА ТЕЛЕ
В общем стандарте определение НОСИМОГО НА ТЕЛЕ изделия не соответствует приведенному на рисунке А.20. В частности, на рисунке А.20 подразумевается, что НОСИМЫЕ НА ТЕЛЕ изделия являются прямой разновидностью ПЕРЕНОСНЫХ изделий, тогда как определение 3.144 общего стандарта указывает, что НОСИМЫЕ НАТЕЛЕ изделия являются прямой разновидностью ТРАНСПОРТИРУЕМЫХ изделий, но не разновидностью ПЕРЕНОСНЫХ изделий.
201.3.203 ЗАЩИТНЫЙ ОСТАНОВ
Поскольку РОБОТЫ РОКО обладают определенным уровнем автономности, они могут автоматически инициировать функцию останова для обеспечения ОСНОВНОЙ БЕЗОПАСНОСТИ. Потребовался новый термин ЗАЩИТНЫЙ ОСТАНОВ, чтобы отличить эту новую функцию от АВАРИЙНОГО ОСТАНОВА. В других стандартах используется термин ЗАЩИТНЫЙ ОСТАНОВ, который заимствован и изменен. В частности, настоящий стандарт не позволяет инициировать ЗАЩИТНЫЙ ОСТАНОВ вручную в отличие от ГОСТ Р 60.2.2.1, который допускает как ручную, так и автоматическую активацию ЗАЩИТНОГО ОСТАНОВА. Ручное управление для инициирования ЗАЩИТНОГО ОСТАНОВА рядом с АВАРИЙНЫМ ОСТАНОВОМ считается потенциально дезориентирующим для ОПЕРАТОРА в отношении того, какую процедуру останова использовать в чрезвычайной ситуации.
Кроме того, еще одно различие между ЗАЩИТНЫМ ОСТАНОВОМ и АВАРИЙНЫМ ОСТАНОВОМ заключается в том, что после АВАРИЙНОГО ОСТАНОВА работа не может быть возобновлена автоматически. В РОБОТАХ РОКО после ЗАЩИТНОГО ОСТАНОВА работа может быть возобновлена вручную или автоматически в соответствии с 201.9.2.101. Автоматический перезапуск (возобновление) должен быть разрешен только в соответствии с ПРОЦЕССОМ МЕНЕДЖМЕНТА РИСКА.
Пример ЗАЩИТНОГО ОСТАНОВА: РОБОТ РОКО обнаруживает колебание, связанное с нестабильностью контура управления, и затем инициирует процедуру останова.
201.3.207 НАРУШЕНИЕ
Термин НАРУШЕНИЕ, определенный в ГОСТ Р ИСО 9999, основан на более сложном определении Всемирной организации здравоохранения (ВОЗ): НАРУШЕНИЕ — это утрата или проблема в структуре тела или физиологических функциях (включая психические функции). Слово «проблема» в настоящем определении использовано исключительно для обозначения значительного отклонения от установленных статистических норм (т. е. как отклонение от среднего значения по совокупности в пределах измеренных стандартных норм), и его необходимо использовать только в данном смысле.
201.3.209 ОЦЕНКА
Чтобы помочь прояснить взаимосвязь между измерением, ОЦЕНКОЙ и диагнозом, приведем пример:
РОБОТА РОКО, использующего экзоскелеты для каждой руки, допускается использовать для широкого спектра неврологических ОЦЕНОК, таких как оценка проприоцепции ПАЦИЕНТА. Если зрение ПАЦИЕНТА заблокировано, а РОБОТ РОКО перемещает одну руку в заданное положение, ПАЦИЕНТУ дают указание переместить другую руку в зеркальное положение. Повторные измерения могут быть использованы для оценки точности, согласованности и других возможностей ПАЦИЕНТА.
В данном примере:
а) РОБОТ РОКО измеряет положение руки во время выполнения задачи (т. е. определяет, насколько точно одна рука зеркально соответствует руке, перемещаемой РОБОТОМ РОКО);
б) РОБОТ РОКО оценивает НАРУШЕНИЕ проприоцепции ПАЦИЕНТА, используя измеренное положение руки, чтобы оценить точность и согласованность ПАЦИЕНТА в зеркальном сопоставлении двух рук;
в) затем лечащий врач использует эту ОЦЕНКУ в совокупности с результатами других анализов либо для определения диагноза ПАЦИЕНТА (например, транзиторная ишемическая атака), либо для отслеживания выздоровления (например, после инсульта).
201.3.210 ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ
Каждую ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ следует рассматривать как РАБОЧУЮ ЧАСТЬ согласно описанию в общем стандарте, но для ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ применяют дополнительные соображения, определенные в настоящем стандарте.
201.3.211 РЕАБИЛИТАЦИЯ
Как указано в примечании 2 в 201.3.211, определение РЕАБИЛИТАЦИИ в настоящем стандарте отличается от определения ВОЗ, в котором РЕАБИЛИТАЦИЯ определена как «ряд мер, помогающих людям, которые являются или могут стать инвалидами, достичь и поддерживать оптимальное функционирование во взаимодействии с окружающей средой». Данное определение охватывает широкий спектр возможных вмешательств, включая физическую, когнитивную и трудовую терапию. Определение РЕАБИЛИТАЦИИ в настоящем стандарте сосредоточено на подгруппе РЕАБИЛИТАЦИОННЫХ видов терапии, характерных для работы с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ, связанными с НАРУШЕНИЕМ ПАЦИЕНТА, и выделяет другие определенные термины, относящиеся к РЕАБИЛИТАЦИИ.
РЕАБИЛИТАЦИЯ — комплексный процесс после НАРУШЕНИЯ ПАЦИЕНТА вследствие заболевания или травмы. В зависимости от конкретных обстоятельств ПАЦИЕНТА процесс РЕАБИЛИТАЦИИ не обязательно унифицирован. Не всегда возможно определить, когда заканчиваются меры интенсивной терапии и начинается процесс РЕАБИЛИТАЦИИ. Также затруднительно определить окончание процесса РЕАБИЛИТАЦИИ.
РЕАБИЛИТАЦИЯ, ОЦЕНКА СОСТОЯНИЯ, КОМПЕНСАЦИЯ и ОБЛЕГЧЕНИЕ — это процессы, которые могут выполняться последовательно или параллельно.
Согласно ГОСТ Р ИСО 9999—2019, 2.10 «функционирование» (как часть определяемого термина «РЕАБИЛИТАЦИЯ») — это «собирательный термин для функций тела (организма), структур тела, деятельности и участия, обозначающий положительные аспекты взаимодействия между индивидуумом (в жизнеспособном состоянии) и контекстовыми факторами этого индивидуума (факторы окружающей среды и личные факторы)».
201.3.212 РОБОТ
Используемый в определении к термину «РОБОТ» термин «Автономность (AUTONOMY)» определен в [3] как способность к КОНТРОЛЮ, ГЕНЕРИРОВАНИЮ, ВЫБОРУ и ВЫПОЛНЕНИЮ КЛИНИЧЕСКИХ ФУНКЦИЙ без вмешательства или с ограниченным вмешательством ОПЕРАТОРА.
201.3.214 СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ
СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ может быть объяснена простым языком как надлежащая осведомленность о ситуации. Несмотря на то, что общее понятие широко распространено во многих областях, требуется более точное определение при попытке применить понятие СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, чтобы понять его важность и актуальность. В результате за прошедшие годы было предложено множество разных определений. Единственное текущее определение СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ приведено в ГОСТ Р ИСО 11064-7—2016, 3.4: «Осведомленность ситуации — понимание ОПЕРАТОРОМ/пользователем фактического состояния управляемой системы и/или процесса в каждый момент времени».
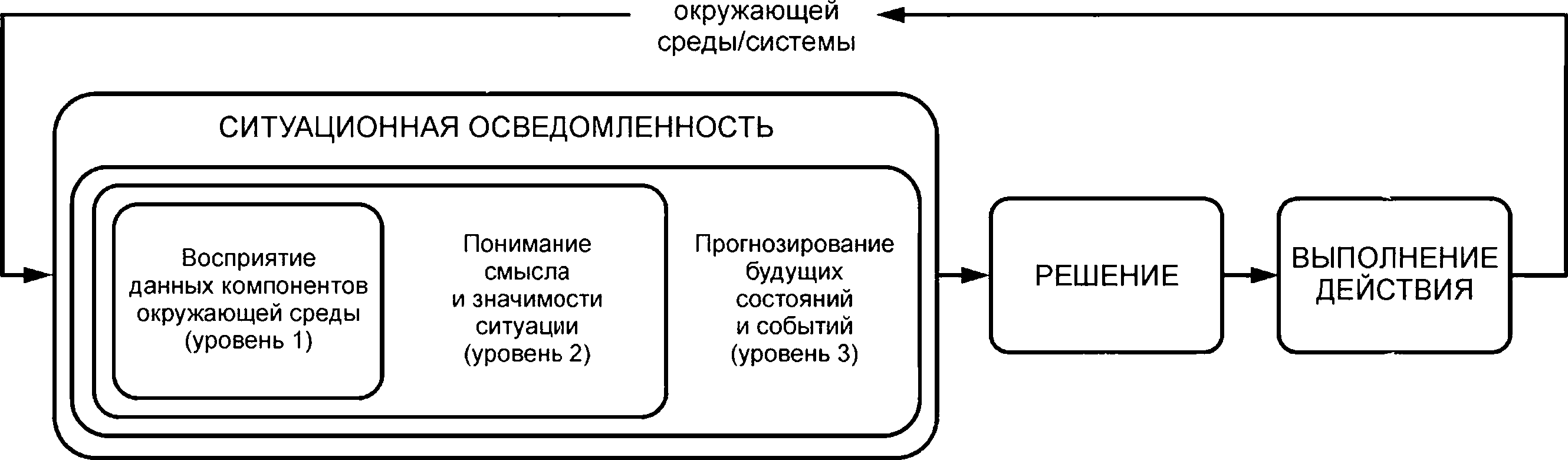
Для определения СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в настоящем стандарте принят трехуровневый подход, который проиллюстрирован на рисунке АА.2, который демонстрирует процесс надлежащей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ: восприятие ситуации (например, поведения РОБОТА РОКО), понимание смысла этой ситуации и ее значимости, а также прогнозирование потенциальных будущих состояний и событий в зависимости от решения.
Задача и факторы окружающей среды:
- рабочая нагрузка;
- стресс-факторы;
- конструкция системы;
- сложность
Состояние
Индивидуальные факторы:
- цели; - опыт;
- предубеждения; - подготовка;
- знания; - способности
Рисунок АА.2 — Модель СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
Рисунок АА.2 относится к правой части рисунка А.1 ГОСТ Р МЭК 62366-1—2021, который воспроизведен на рисунке АА.З.
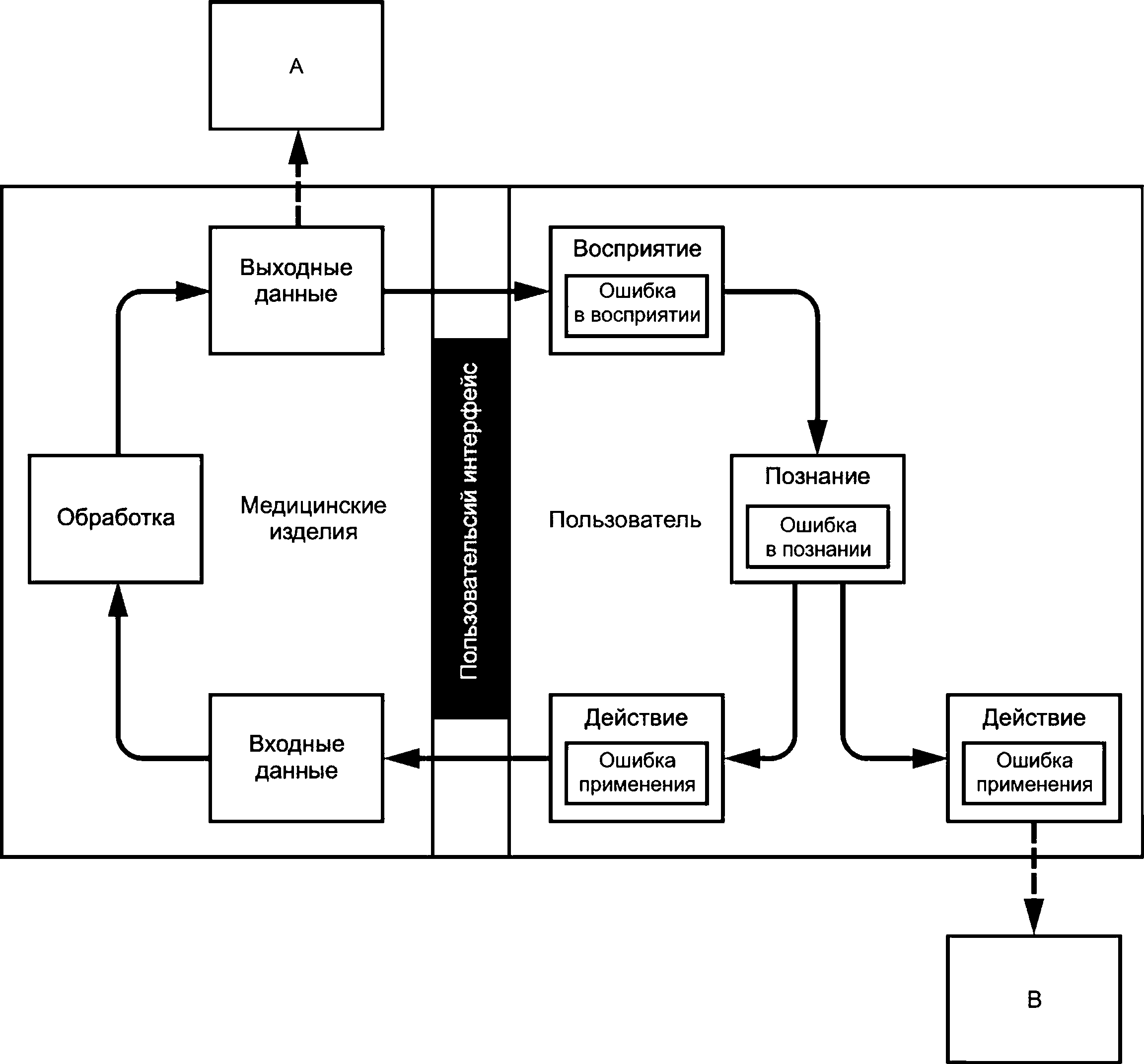
А — ОПАСНАЯ СИТУАЦИЯ, вызванная реакцией данного медицинского изделия;
В — ОПАСНАЯ СИТУАЦИЯ, вызванная действием или бездействием ПОЛЬЗОВАТЕЛЯ в отношении ПАЦИЕНТА или другого медицинского изделия на основе информации, полученной от данного медицинского изделия
Примечание — Под восприятием понимается восприятие или отсутствие восприятия, под познанием понимается познание или отсутствие познания, а под действием понимается действие или отсутствие действия. Ячейки с ошибками, заштрихованные светлым цветом, — это места, где могут возникнуть ошибки.
Рисунок АА.З — Модель взаимодействия пользователя с медицинским изделием
В таблице АА.1 показана корреляция между рисунками АА.2 и АА.З.
Таблица АА.1 — Отображение корреляции между рисунками АА.2 и АА.З
Блоки на рисунке АА.2 | Блоки на рисунке АА.З |
Модель СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ | ГОСТРМЭК 62366-1 |
Восприятие (уровень 1 СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ) | Восприятие |
Понимание (уровень 2 СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ) | Познание |
Прогнозирование (уровень 3 СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ) | — |
Решение | — |
Выполнение действия | Действие |
Окончание таблицы ДА. 1
Блоки на рисунке АА.2 | Блоки на рисунке АА.З |
Состояние окружающей среды | — |
Задача и факторы окружающей среды | — |
Индивидуальные факторы | — |
— | Входные данные (МЭИ) |
— | Обработка (МЭИ) |
— | Выходные данные (МЭИ) |
— | ОПАСНАЯ СИТУАЦИЯ (МЭИ и ПОЛЬЗОВАТЕЛЬ) |
Таким образом, рисунок АА.2 больше ориентирован на ОПЕРАТОРА, тогда как рисунок АА.З ориентирован как на ОПЕРАТОРА, так и на МЭИ. Важным элементом рисунка АА.2 является окружающая среда, которая определяется ПРЕДУСМОТРЕННЫМ ПРИМЕНЕНИЕМ МЭИ. Хотя прогнозирование и решение являются частью познания, ни одно из этих понятий не рассматривается в ГОСТ Р МЭК 62366-1, и поэтому ИЗГОТОВИТЕЛЬ может упустить их из виду.
Следует отметить, что СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ также относится к среде, в которой работает РОБОТ РОКО. Степень того, что составляет среду РОБОТА РОКО, зависит от контекста. В частности, среда РОБОТА РОКО, включая ПАЦИЕНТА и все, что взаимодействует с ПАЦИЕНТОМ и/или РОБОТОМ РОКО, может включать следующее:
- другие РОБОТЫ РОКО;
- другие медицинские устройства, например инвалидные коляски;
- другие устройства;
- люди или животные;
- ОПЕРАТОР;
- условия окружающей среды в помещении или зоне, в которой находится РОБОТ РОКО, например:
- условия освещения;
- физические препятствия или барьеры (например, стулья, двери, стены);
- земля или пол (например, ровный ли пол);
- конкретные ситуации для среды оказания медицинской помощи вне медицинских учреждений, например многолюдные тротуары, метро, общественный транспорт, общественные места.
201.3.215 ШАГАЮЩИЙ
ШАГАЮЩИЕ РОБОТЫ РОКО могут работать в разных сценариях, предусмотренных ИЗГОТОВИТЕЛЕМ, что может повлиять на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА, например:
- свободная ходьба ПАЦИЕНТА (без какой-либо другой поддержки, кроме как со стороны ШАГАЮЩЕГО РОБОТА РОКО),
- свободная ходьба ПАЦИЕНТА с использованием дополнительных опор, например костыли, ходунки/рол-латоры;
- ходьба с поддержкой со стороны ОПЕРАТОРА, не являющегося ПАЦИЕНТОМ;
- ходьба с поддержкой от подвесной системы.
201.4.2.3.102 МЕНЕДЖМЕНТ РИСКА и СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ
Хотя включение в систему некоторого уровня автономности может улучшить многие возможности системы, опыт других отраслей, таких как авиационная промышленность, показал, что повышение уровня автономности иногда приводит к увеличению РИСКА причинения ВРЕДА. Предыдущие исследования показали, что одной из проблем повышения уровня автономности является то, что это может привести к потере ОПЕРАТОРОМ СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, что, в свою очередь, может привести к ОШИБКЕ ПРИМЕНЕНИЯ. В частности, потеря СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ может привести к двум возможным ошибкам:
а) ошибке ОПЕРАТОРА в обнаружении проблемы;
б) ошибке ОПЕРАТОРА в понимании проблемы.
В зависимости от характера проблемы любая из этих ошибок может затем привести к ОШИБКЕ ПРИМЕНЕНИЯ, которая может создать ОПАСНУЮ СИТУАЦИЮ в РОБОТЕ РОКО.
Чтобы обеспечить соответствие требованию 201.4.2.3.102, поскольку ИЗГОТОВИТЕЛЬ определяет ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, связанные с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, которые могут привести к неприемлемому РИСКУ, ИЗГОТОВИТЕЛЬ должен следовать ПРОЦЕССУ МЕНЕДЖМЕНТА РИСКА, а также определить и внедрить надлежащие СРЕДСТВА УПРАВЛЕНИЯ РИСКОМ. Обязательная информация в ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТАХ должна включать следующее:
- описание ОПАСНОСТЕЙ или ОПАСНЫХ СИТУАЦИЙ, которые могут привести к потере СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, включая:
- любые предупреждающие знаки и возможные исходы этой ситуации и
- необходимые действия, которые должен предпринять ОПЕРАТОР для снижения РИСКА до приемлемого уровня;
- при необходимости в ЭКСПЛУАТАЦИОННЫХ ДОКУМЕНТАХ и в надлежащей зоне РОБОТА РОКО должна быть предусмотрена заметная маркировка (например, предупреждения, предостережения);
- меры по обучению ОПЕРАТОРА, определенные в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, также должны включать эту информацию для снижения РИСКА до приемлемого уровня.
При НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ РОБОТА РОКО он может выполнять разные задачи с разным уровнем автономности, что, в свою очередь, может привести к разным ролям ответственности ОПЕРАТОРА и РОБОТА РОКО. Зачастую по мере повышения уровня автономности РОБОТА РОКО возрастает вероятность потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
Методы улучшения СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ приведены в ВВ.З.
201.4.7 УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ для МЭИ
Примеры методов для УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ для МЭИ, которые можно использовать для оценки того, поддерживается ли надлежащая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ, приведены в ВВ.4.
201.9.2 .3.1 Непреднамеренное движение
Движение, как правило, является ОСНОВНОЙ РАБОЧЕЙ ФУНКЦИЕЙ (см. ГОСТ Р МЭК 62366-1) РОБОТА РОКО, особенно при движении ПАЦИЕНТА, поддерживаемого РОБОТОМ РОКО. Органы управления включением/ выключением, которые включают или отключают ДВИГАТЕЛЬНЫЕ ФУНКЦИИ РОБОТА РОКО, следует отличать от органов управления, непосредственно управляющих движением. Такие органы управления включением/выключе-нием должны быть расположены, утоплены или защищены другими средствами таким образом, чтобы их невозможно было случайно включить или отключить.
Органы управления, которые непосредственно управляют движением РОБОТА РОКО, как правило, не предназначены для высокоточного управления траекторией, и результирующие движения РОБОТА РОКО в совокупности с движениями ПАЦИЕНТА, вероятно, будут частично непреднамеренными (с точки зрения точного позиционирования или синхронности).
В процессе использования РОБОТОВ РОКО непреднамеренные движения могут возникать как движения, которые отличаются по синхронности и/или траектории от движений, запланированных ОПЕРАТОРОМ, или не точно определены ОПЕРАТОРОМ. Такое активное воздействие на движение со стороны РОБОТА РОКО может иметь место только тогда, когда преднамеренно включены ОСНОВНЫЕ РАБОЧИЕ ФУНКЦИИ РОБОТА РОКО, связанные сдвижением ПАЦИЕНТА. Возможны непреднамеренные движения по следующим причинам:
- РОБОТ РОКО может инициировать и управлять движениями, которые не предусмотрены ОПЕРАТОРОМ (возможно, ПАЦИЕНТОМ) в отношении синхронности или точной траектории движения. Это может происходить из-за того, что по определению РОБОТ имеет определенную степень, а эксплуатация РОБОТА РОКО, как правило, осуществляется совместно ОПЕРАТОРОМ, ПАЦИЕНТОМ или РОБОТОМ РОКО (см. также 201.9.2.3.1.102);
- ОПЕРАТОР, ПАЦИЕНТ и РОБОТ РОКО могут совместно управлять ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ (более одной точки управления, см. также 201.9.2.3.1.102), и каждое движение может быть запланировано одним ОПЕРАТОРОМ, но не другим, что приводит к частично непреднамеренным движениям.
Пример — ОПЕРАТОР, в данном случае терапевт, разрабатывает упражнение на движение (запланированное). ПАЦИЕНТ должен инициировать движение в качестве вторичного ОПЕРАТОРА. Если ПАЦИЕНТ, как вторичный ОПЕРАТОР, активирует движение непреднамеренно, это является непреднамеренным частично: правильное движение, но неправильное время движения;
- конкретная реализация управления ПАЦИЕНТОМ РОБОТА РОКО может привести к ограниченной точности управления, т. е. если интерфейс управления является «неявным» с использованием биофизической информации; прямое управление движением может быть недостаточно точным и привести к непреднамеренной скорости, диапазону движения, времени движения и координации движения и остановки.
ИЗГОТОВИТЕЛЬ должен рассмотреть все аспекты непреднамеренного движения в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА; в случае неприемлемого РИСКА должны быть реализованы дополнительные СРЕДСТВА УПРАВЛЕНИЯ РИСКОМ.
Примечание — ГОСТ Р 60.1.2.1—2016, 5.8—5.10, может помочь ИЗГОТОВИТЕЛЮ выполнить ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА, относящийся к непреднамеренному движению при наличии более чем ОДНОЙ ТОЧКИ УПРАВЛЕНИЯ.
201.9.2.3.1.102 Непреднамеренное движение, связанное с совместным управлением со стороны ПАЦИЕНТА, ОПЕРАТОРА или РОБОТА РОКО
Совместное управление — это концепция управления системой, при которой несколько операторов одновременно управляют одной системой.
Совместное управление, характерное для РОБОТОВ РОКО, состоит из управления, совместно реализуемого РОБОТОМ РОКО, ПАЦИЕНТОМ или ОПЕРАТОРОМ в любом сочетании. Например, управляемая система в данном контексте, как правило, включает в себя одну или несколько конечностей ПАЦИЕНТА и часть РОБОТА РОКО, включая его ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ, контактирующую с конечностями. При совместном управлении этой системой управление осуществляет ПАЦИЕНТ, а также РОБОТ РОКО (см. рисунок АА.4). В некоторых сценариях ОПЕРАТОР также может напрямую взаимодействовать (касаться) с этой частью РОБОТА РОКО и, таким образом, управлять движением той же системы, например для программирования движений РОБОТА РОКО, используемых для выполнения КЛИНИЧЕСКИХ ФУНКЦИЙ. В этой ситуации активны три разных оператора управления, т. е. ПАЦИЕНТ, ОПЕРАТОР и РОБОТ РОКО. У каждого из этих трех операторов управления может быть свое намерение относительно движения. Эти намерения могут быть одинаковыми или, по крайней мере, похожими. Однако они также могут противоречить друг другу. Такой конфликт может привести к «непреднамеренному движению» с точки зрения одного из операторов управления, то есть ПАЦИЕНТА, ОПЕРАТОРА или РОБОТА РОКО. Этот возможный конфликт точек зрения операторов управления является ключевым аспектом, который следует учитывать при оценке систем с совместным управлением.
В системе с совместным управлением РОБОТОМ РОКО намерение ПАЦИЕНТА относительно движения может быть отражено в результирующем движении. Если результирующее движение не соответствует намерению или пониманию ОПЕРАТОРА, оно может представлять собой ОПАСНОСТЬ «непреднамеренного движения» для ОПЕРАТОРА, как определено в 201.9.2.3.1.102.
В системе с совместным управлением РОБОТОМ РОКО результирующее движение может не всегда согласовываться с намерением ПАЦИЕНТА, даже если оно согласуется с намерением ОПЕРАТОРА. Это несоответствие может быть ОПАСНОСТЬЮ «непреднамеренного движения» для ПАЦИЕНТА, как определено в 201.9.2.3.1.102.
Рисунок АА.4 представляет собой типичную блок-схему системы с совместным управлением, в которой ПАЦИЕНТ и РОБОТ РОКО совместно управляют движением конечностей ПАЦИЕНТА.
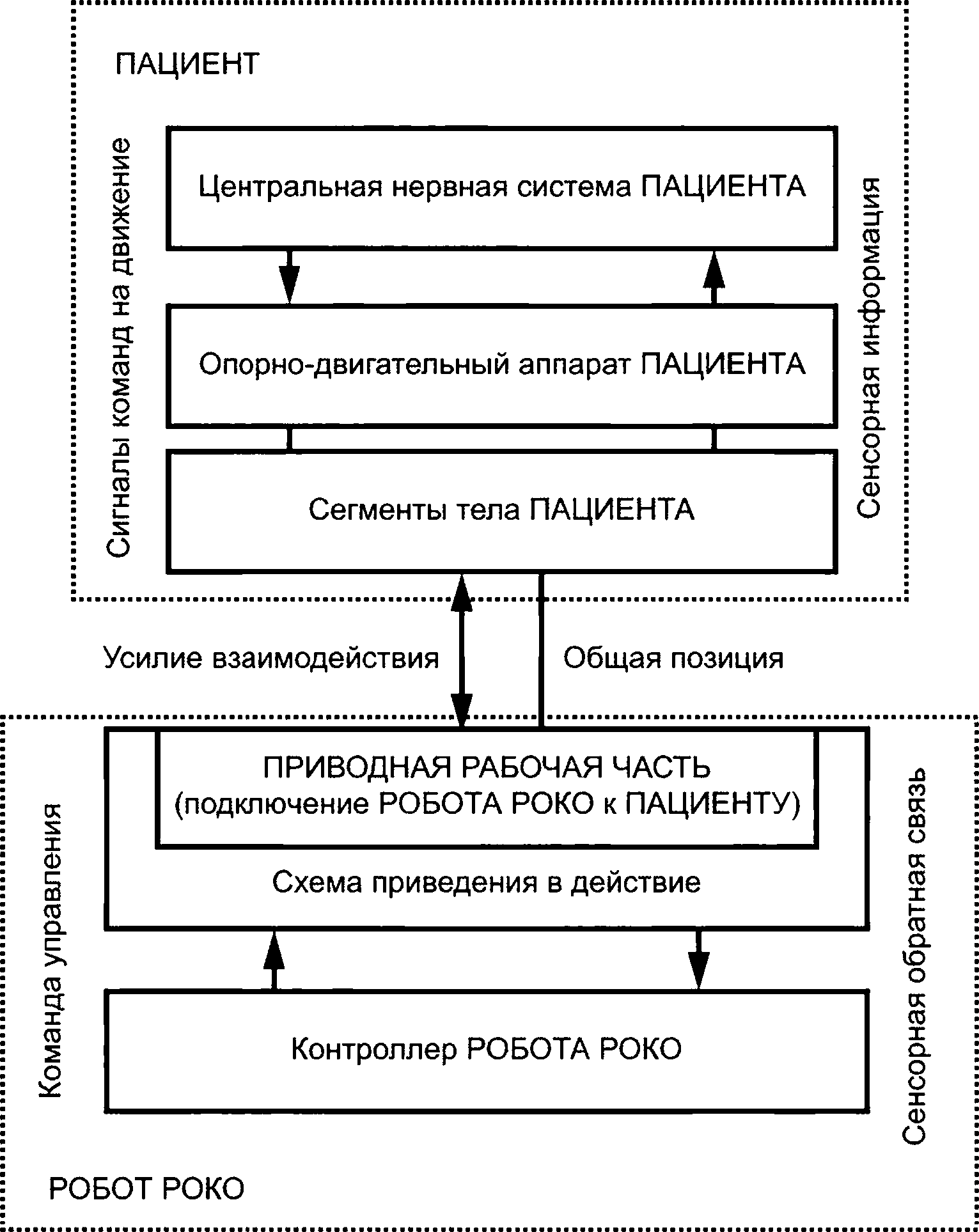
Рисунок АА.4 — Блок-схема системы совместного управления РОБОТА РОКО: управление со стороны ПАЦИЕНТА и РОБОТА РОКО
Рисунок АА.5 является расширением, где также ОПЕРАТОР, т. е. терапевт, непосредственно участвует в управлении движением конечностей ПАЦИЕНТА и РОБОТОМ РОКО, подключенным к ним через ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ.
Наблюдение за движением
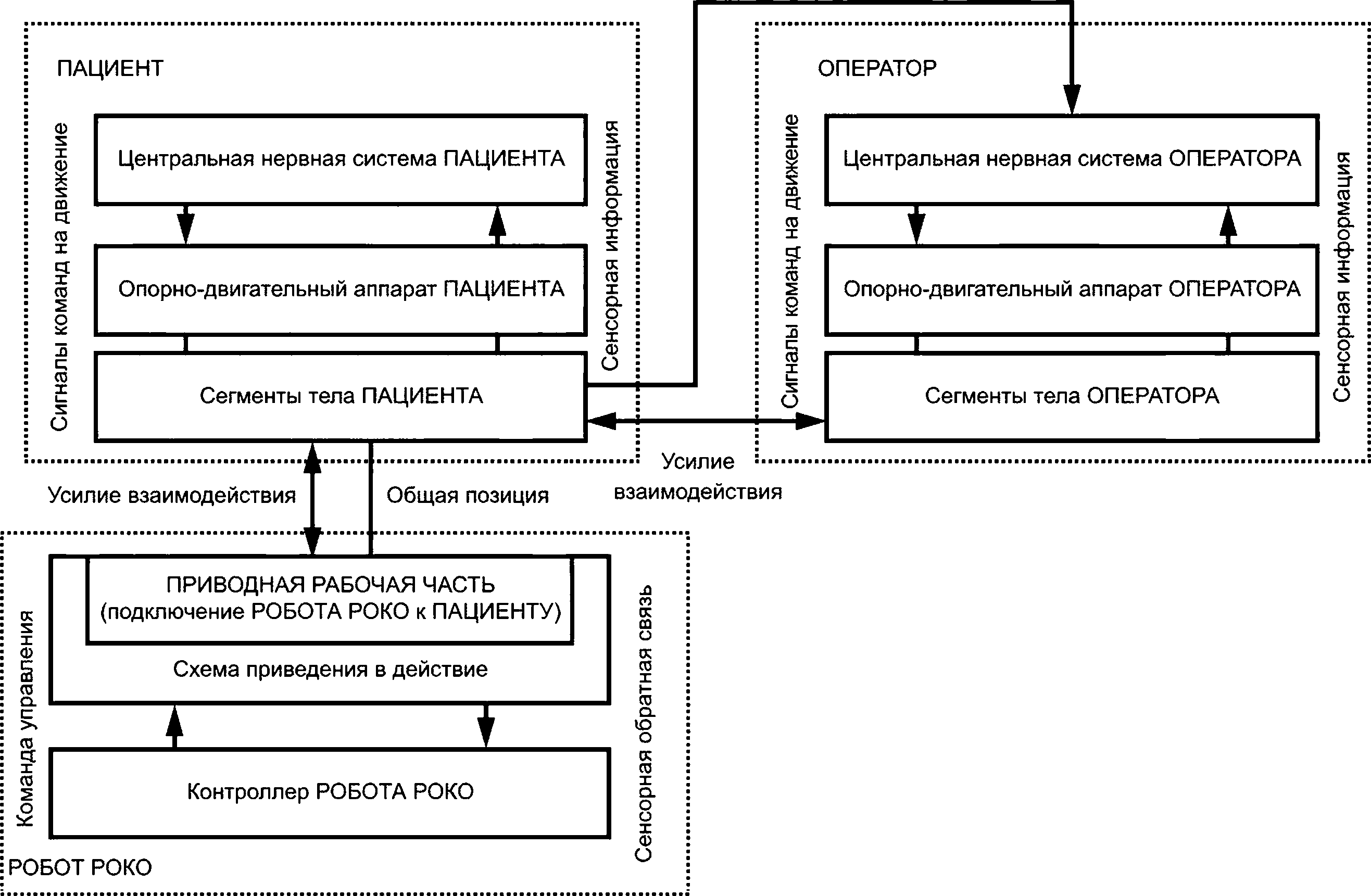
Рисунок АА.5 — Блок-схема системы совместного управления: управление со стороны ПАЦИЕНТА, ОПЕРАТОРА и РОБОТА РОКО
Рисунок АА.6 представляет собой еще одно расширение, в котором ОПЕРАТОР косвенно участвует в управлении движением конечностей ПАЦИЕНТА и РОБОТОМ РОКО, подключенным к ним через его ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ, корректируя управление РОБОТОМ РОКО. Усилие взаимодействия и общая позиция между ПАЦИЕНТОМ и РОБОТОМ РОКО, представленные на этих схемах, представляют собой примеры физических взаимодействий, используемых в определении ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ.
Наблюдение за движением
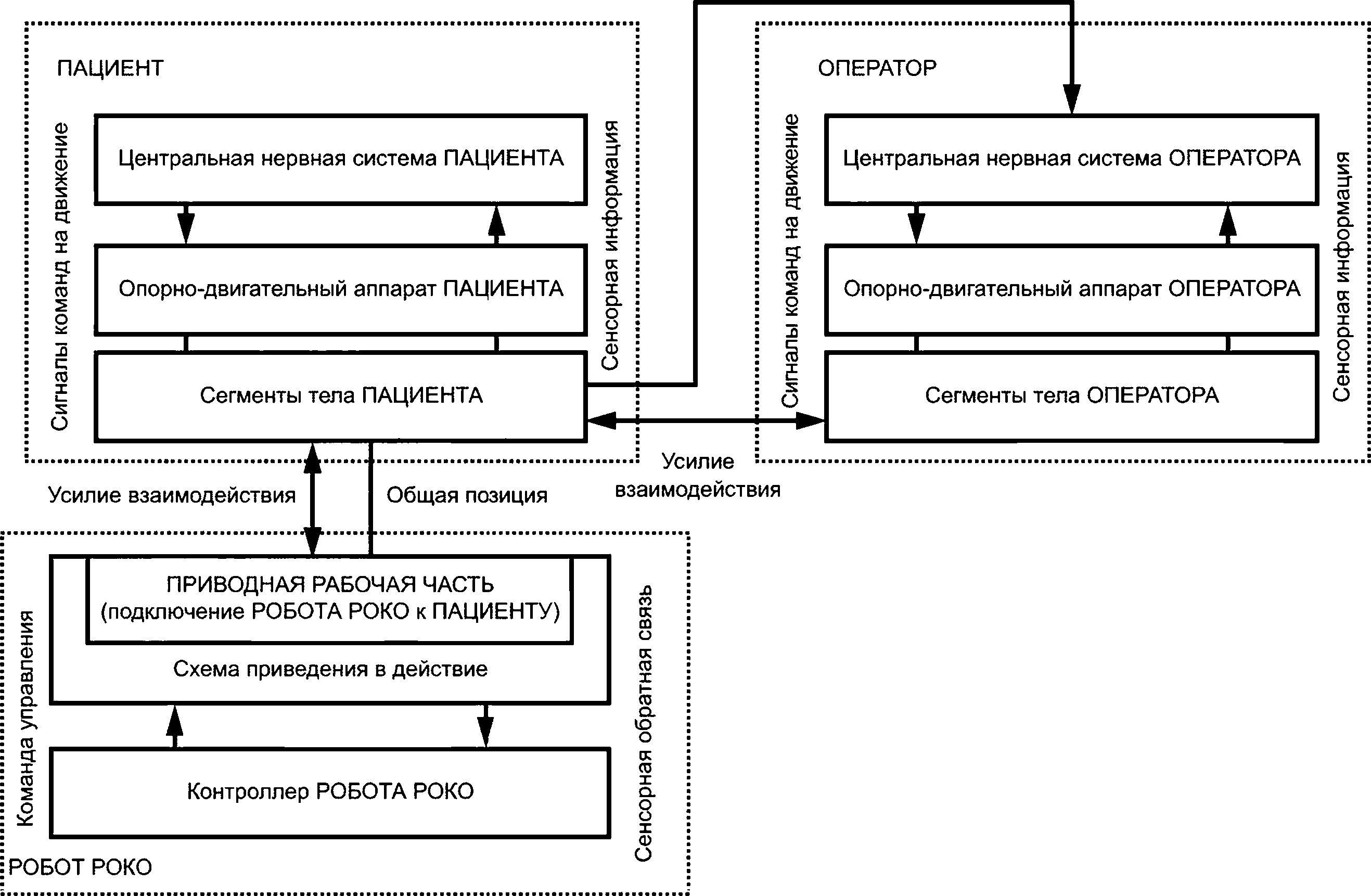
Рисунок АА.6 — Блок-схема системы совместного управления:
управление со стороны ПАЦИЕНТА и РОБОТА РОКО и корректировка управления ОПЕРАТОРОМ
Принято считать, что ОПЕРАТОР и ПАЦИЕНТ управляют РОБОТОМ РОКО посредством своей центральной нервной системы и нервно-мышечного двигательного аппарата. РОБОТ РОКО управляется «автономным» контроллером РОБОТА, то есть его алгоритмами управления. Цель алгоритма управления может быть разнообразной: например, управление положением, управление траекторией, управление усилием или управление сопротивлением. Алгоритм управления допускается запрограммировать таким образом, чтобы он реагировал только на движения ПАЦИЕНТА.
Пример — Совместное управление РОБОТОМ РОКО с вводом биосигнала, связанного с движением.
РОБОТ РОКО может использовать биосигнал ПАЦИЕНТА, связанный с движением, в качестве одного из входных сигналов управления, чтобы отслеживать намерение ПАЦИЕНТА и/или его движение для своего ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ. Таким образом это может помочь снизить РИСК непреднамеренного движения ПАЦИЕНТА.
На рисунке АА.7 показан пример ШАГАЮЩЕГО РОБОТА РОКО.
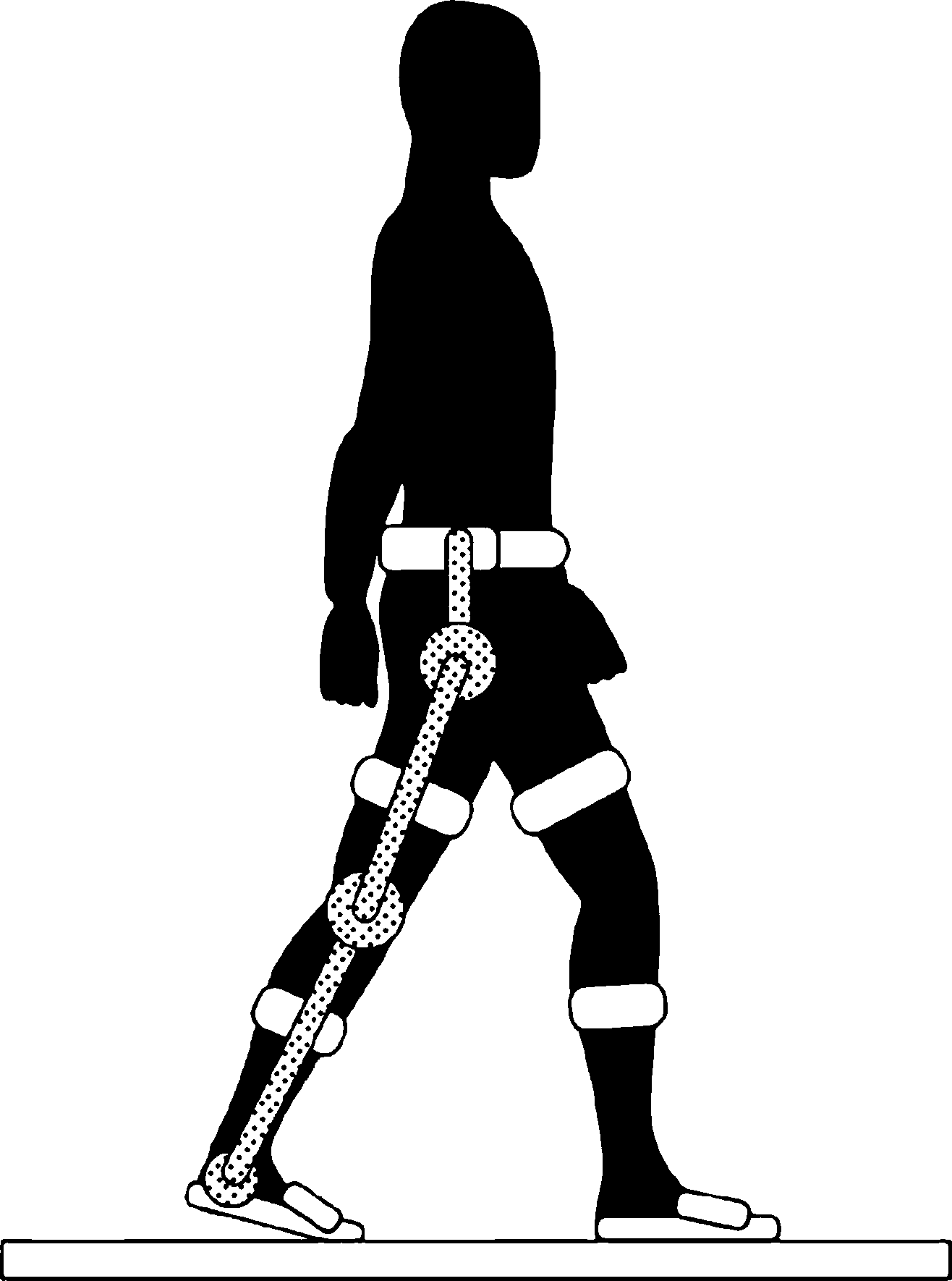
— ПАЦИЕНТ; — ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
— система приведения в действие
ПАЦИЕНТ управляет движением своих ног при ходьбе. РОБОТ РОКО обнаруживает биосигнал и помогает движениям ПАЦИЕНТА в соответствии с биосигналом
Рисунок АА.7 — ШАГАЮЩИЙ РОБОТ РОКО, использующий ввод биосигнала, связанного с движением
На рисунке АА.8 показана конкретная блок-схема РОБОТА РОКО, который представляет собой систему с совместным управлением с ПАЦИЕНТОМ. В этом примере контроллеры ПАЦИЕНТА и РОБОТА РОКО взаимодействуют друг с другом и совместно управляют телом ПАЦИЕНТА и конструкцией РОБОТА РОКО не только посредством ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, но и посредством биосигнала.
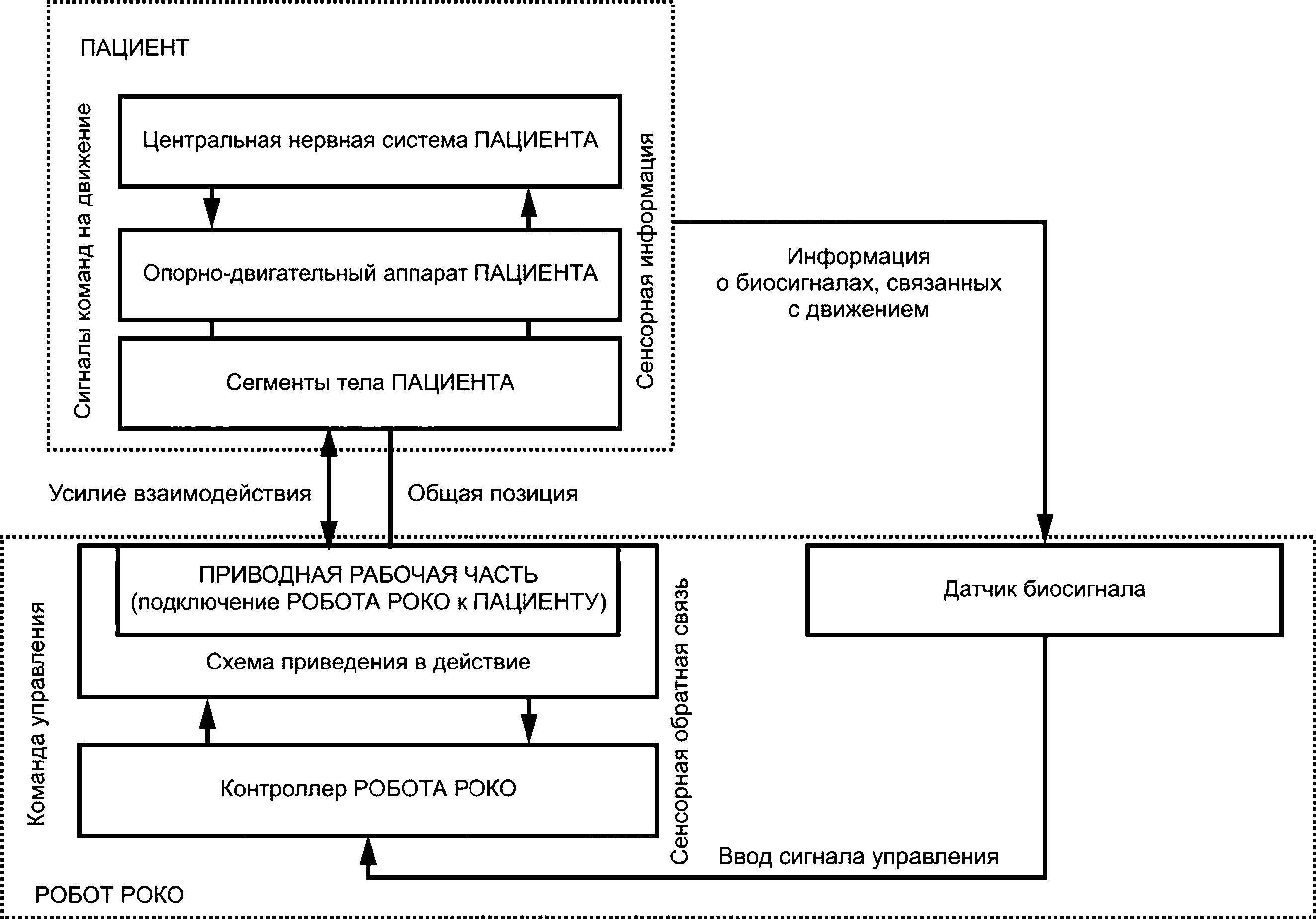
Рисунок АА.8 — Блок-схема ШАГАЮЩЕГО РОБОТА РОКО, использующего биосигнал, связанный с движением, в качестве входных данных
Примечание — Стрелка для «информации о биосигналах, связанных с движением» связана с блоком ПАЦИЕНТА в целом, поскольку ее конкретное происхождение зависит от типа используемого биосигнала (например, ЭЭГ исходит из центральной нервной системы, ЭМГ исходит от опорно-двигательного аппарата, сигналы движения исходят от сегментов тела).
Пример — Совместное управление в РОБОТЕ РОКО с совмещенным управлением с ПАЦИЕНТОМ.
РОБОТ РОКО (например, для нейро-РЕАБИЛИТАЦИИ движений рук) может использовать «совмещенное управление с ПАЦИЕНТОМ», стратегию управления, цель которой состоит в том, чтобы максимально увеличить усилия ПАЦИЕНТА и помогать только тогда, когда это необходимо, и в том объеме, который необходим для достижения определенных целей, таких как движение к заранее определенному целевому положению.
Такое движение может быть реализовано управлением траекторией движения от текущего положения к заданному ОПЕРАТОРОМ целевому положению. Это может быть реализовано в виде канала усилий (также называемым «виртуальным туннелем») вокруг заданной траектории, где, если ПАЦИЕНТ движется в пределах туннеля, РОБОТ РОКО обеспечивает свободное беспрепятственное движение, при этом цель контроллера РОБОТА РОКО состоит в реализации нулевой силы взаимодействия; но переключаясь на управление траекторией с низкой жесткостью, направляя движение ПАЦИЕНТА в правильном направлении к цели при пересечении стенок виртуального туннеля. Это оставляет выполнение задачи ПАЦИЕНТУ, если только отклонение не становится слишком большим; в таком случае РОБОТ РОКО берет на себя управление движением или, по крайней мере, начинает служить опорой для ПАЦИЕНТА.
Это также может способствовать снижению РИСКА непреднамеренного движения ПАЦИЕНТА; таким образом, РОБОТ РОКО предотвращает возникновение больших отклонений при движении.
На рисунке АА.9 показан пример такого РОБОТА РОКО, где РОБОТ представляет собой экзоскелет руки с фиксированной рамой, способный управлять движениями плечевого, локтевого и лучезапястного суставов.
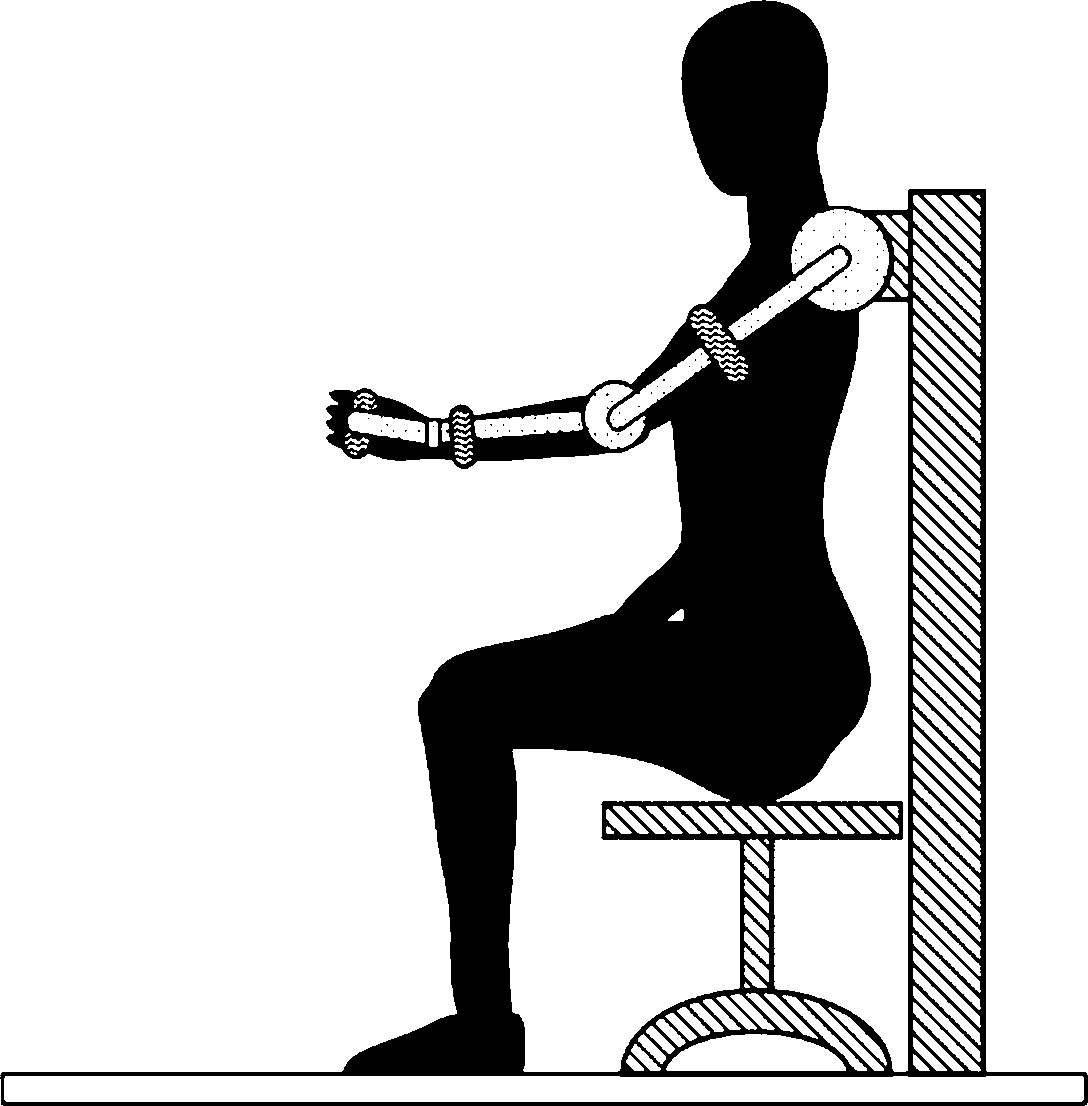
— ПАЦИЕНТ; — ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
ОПОРНАЯ СИСТЕМА;
— система приведения в действие
Примечание — ПАЦИЕНТ управляет движениями своей руки: плечо, локоть, запястье. РОБОТ РОКО управляет движениями руки ПАЦИЕНТА: плечо, локоть, запястье.
Рисунок АА.9 — РОБОТ РОКО, представляющий собой экзоскелет руки для РЕАБИЛИТАЦИИ, в котором применяется стратегия совместного совмещенного с ПАЦИЕНТОМ управления
На рисунке АА.10 показана конкретная блок-схема РОБОТА РОКО, который представляет собой систему с совместным управлением с ПАЦИЕНТОМ. В этом примере контроллеры ПАЦИЕНТА и РОБОТА РОКО взаимодействуют друг с другом посредством измерения силы взаимодействия в ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ. Эта сила влияет непосредственно на движение физического тела ПАЦИЕНТА и физическую структуру РОБОТА РОКО, но также является явным сигналом обратной связи для контроллера РОБОТА РОКО.
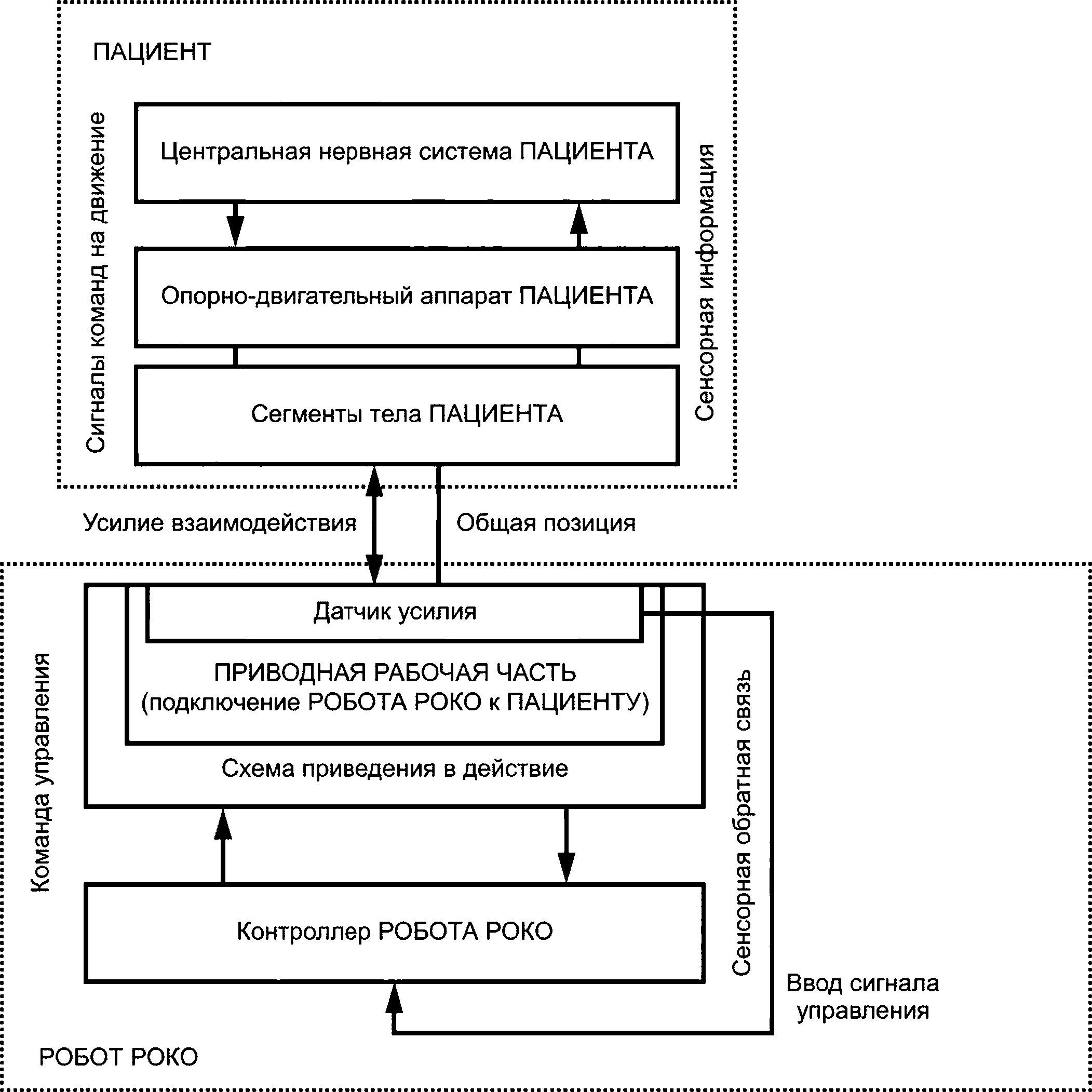
Рисунок АА.10 — Блок-схема экзоскелета руки для РЕАБИЛИТАЦИИ, в которой применяется стратегия совместного совмещенного с ПАЦИЕНТОМ управления
Пример — Пример совместного управления РОБОТОМ РОКО типа «трость».
На рисунке АА.11 показан РОБОТ РОКО типа «трость», который оценивает намерение ПАЦИЕНТА на основе измеренных движений стопы и динамически активирует и деактивирует тормоз, чтобы поддерживать ПАЦИЕНТА во время РЕАБИЛИТАЦИИ ходьбы. Применение тормоза в нужный момент позволяет ПАЦИЕНТУ сохранять устойчивость легче, чем с тростью, и делает возможным более длительные сеансы РЕАБИЛИТАЦИИ с непрерывной ходьбой.
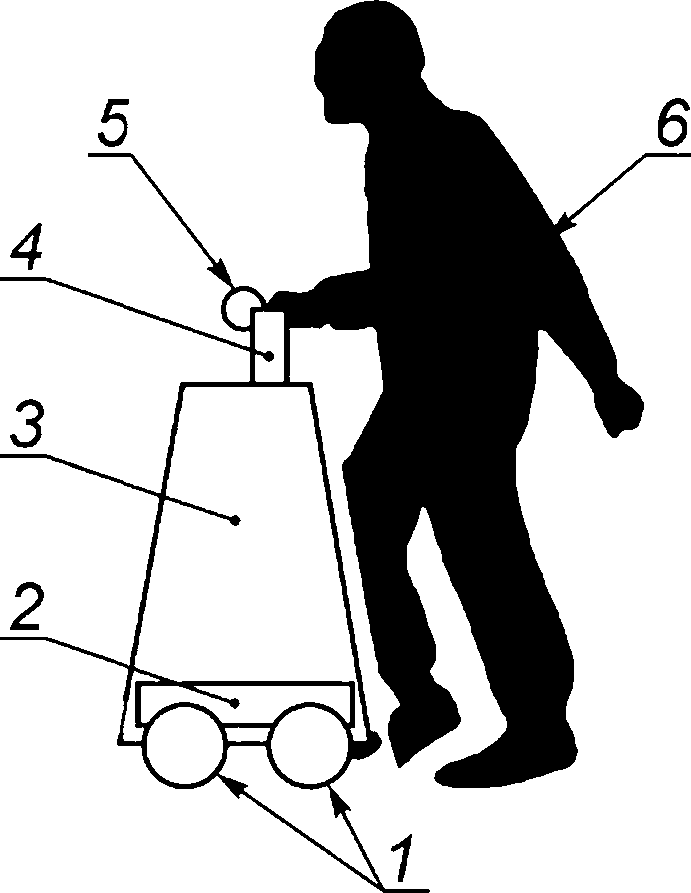
1 — колеса (ОПОРНАЯ СИСТЕМА); 2 — тормозная система (система приведения в действие);
3 — корпус (ОПОРНАЯ СИСТЕМА); 4 — рулевая стойка (ОПОРНАЯ СИСТЕМА);
5 — рукоятка (ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ); б — ПАЦИЕНТ
Рисунок АА.11 — РОБОТ РОКО типа «трость» для РЕАБИЛИТАЦИИ ходьбы
В этом примере РОБОТ РОКО типа «трость» и ПАЦИЕНТ составляют систему с совместным управлением. Блок-схема системы с совместным управлением, состоящей из РОБОТА РОКО типа «трость» и ПАЦИЕНТА, представлена на рисунке АА.12.
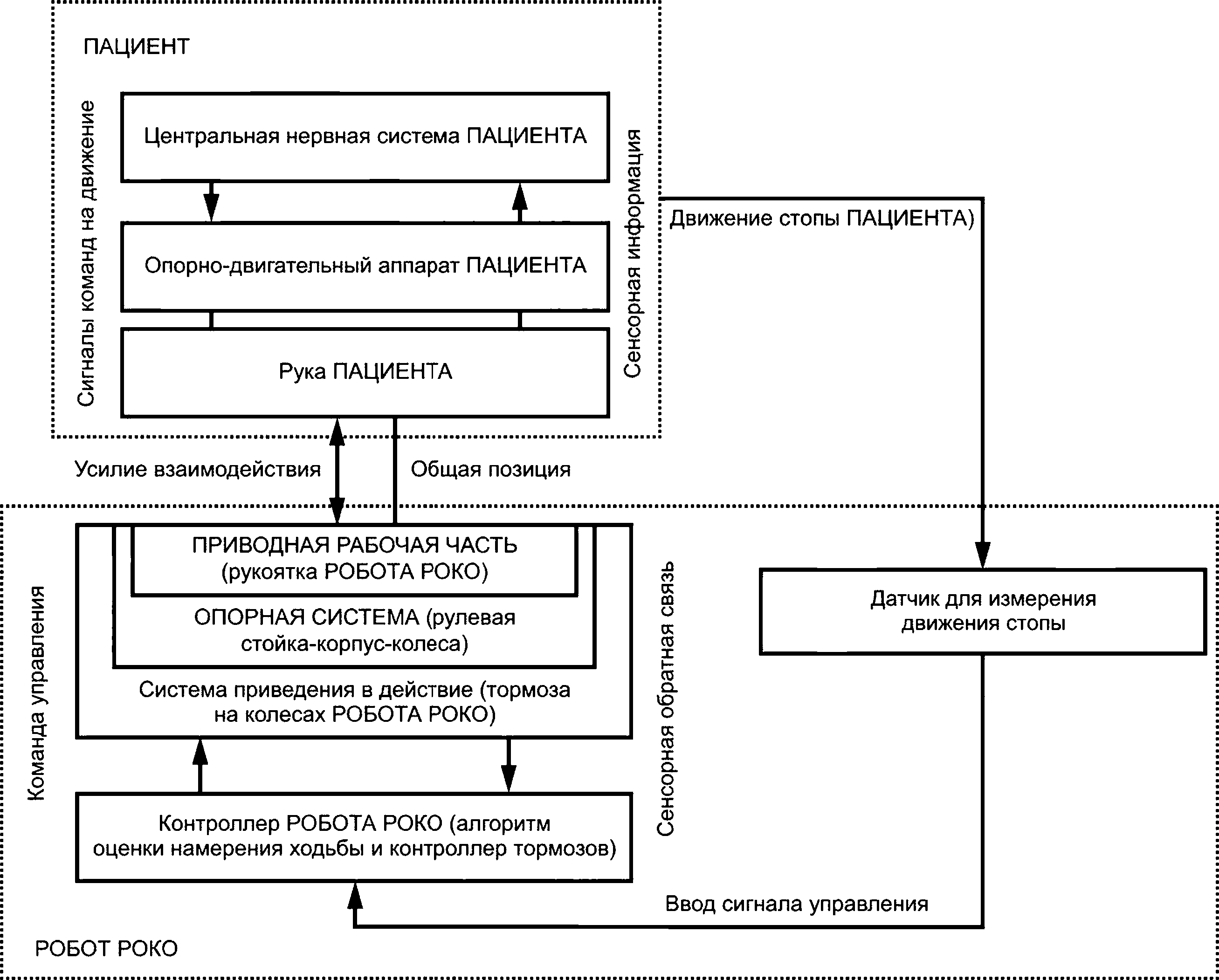
Рисунок АА. 12 — Блок-схема системы РОБОТА РОКО типа «трость»
На рисунке АА.12 ПАЦИЕНТ ходит на основе сигнала команды на движение от своей центральной нервной системы, в то время как его/ее туловище стабилизируется за счет силы реакции от РОБОТА. Сила реакции изменяется во времени при каждом цикле ходьбы с помощью тормозного момента, приложенного к колесам. Таким образом, ходьба ПАЦИЕНТА управляется центральной нервной системой ПАЦИЕНТА и тормозной системой РОБОТА.
201.9.8 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с опорными системами
Для иллюстрации механических ОПАСНОСТЕЙ, связанных с опорными системами, приведены следующие примеры, демонстрирующие различия между системами приведения в действие, опорными системами и подвесными системами, а также для обозначения ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ в различных концепциях РОБОТОВ РОКО, без обязательной демонстрации реальных ситуаций тренировок. Каждый пример изложен с одинаковыми подробностями, чтобы помочь пользователю, которому достаточно рассмотреть только один конкретный пример.
Пример 1 — РОБОТ РОКО типа «РОБОТ-манипулятор» для нижних конечностей.
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ОБЩУЮ НАГРУЗКУ на указанную деталь как вес нижней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие нижней конечности ПАЦИЕНТА.
ИЗГОТОВИТЕЛЬ может определить детали системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ОБЩУЮ НАГРУЗКУ на указанную деталь как вес нижней конечности ПАЦИЕНТА, вес части системы приведения в действие, поддерживаемой указанной деталью, включая общий вес ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, и максимальное выходное усилие нижней конечности ПАЦИЕНТА.
ИЗГОТОВИТЕЛЬ может определить детали опорной системы, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ОБЩУЮ НАГРУЗКУ на указанную деталь как вес нижней конечности ПАЦИЕНТА, вес системы приведения в действие, включая общий вес ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ, вес той части опорной системы, которая поддерживается указанной деталью, и максимальное выходное усилие нижней конечности ПАЦИЕНТА.
В данном примере опорная система для ПАЦИЕНТА (т. е. кровать, изображенная на рисунке АА.13) является частью РОБОТА РОКО, которая статически и динамически нагружена весом всего тела ПАЦИЕНТА; поэтому специальные требования подпункта 9.8.3 общего стандарта применимы к опорной системе. Это связано с тем, что ее механическая неисправность, вероятно, представляет собой неприемлемый РИСК.
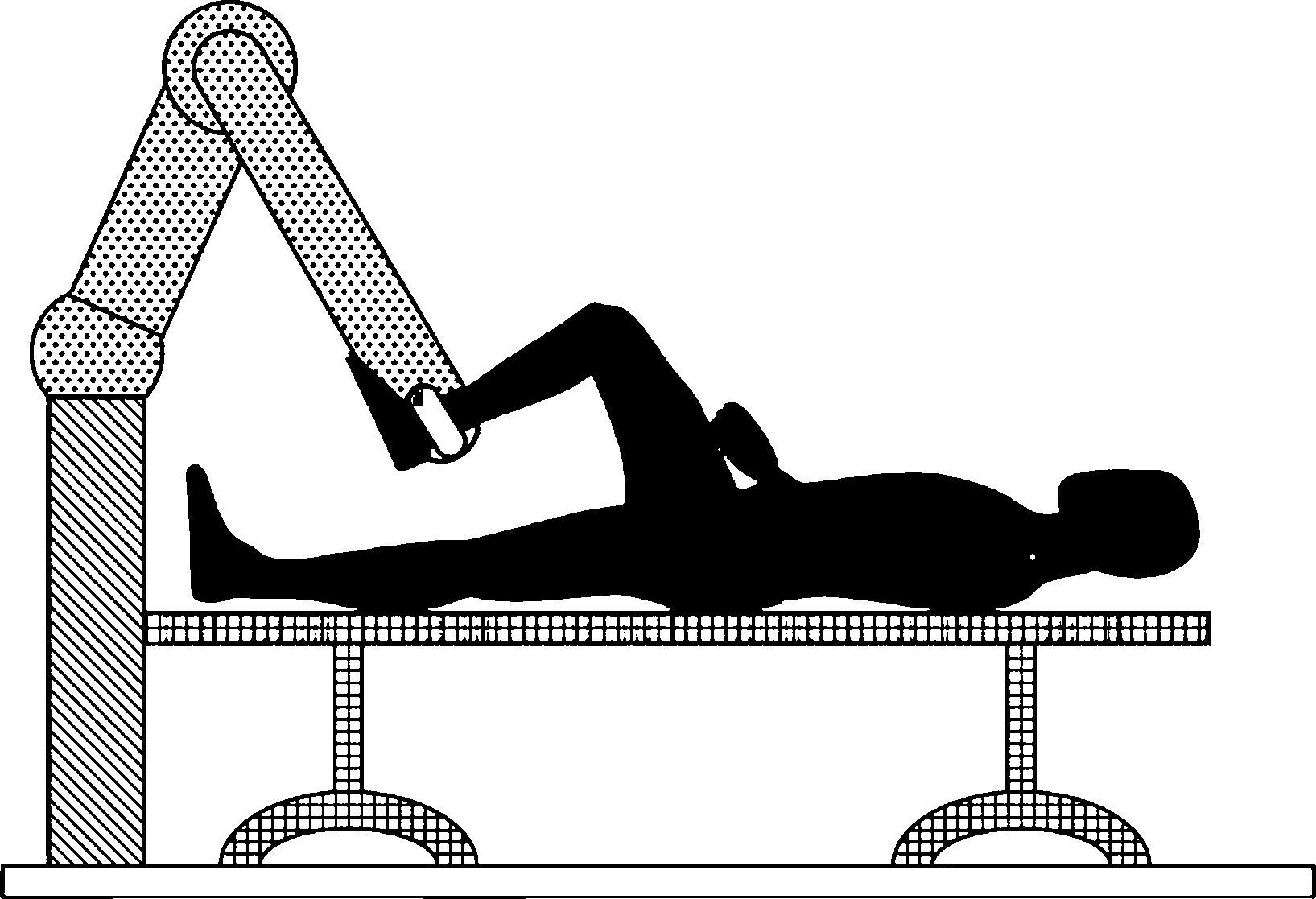
ПАЦИЕНТ;
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
ОПОРНАЯ СИСТЕМА;
ОПОРНАЯ СИСТЕМА для ПАЦИЕНТА (см. 9.8.3 общего стандарта);
•*<<<• — система приведения в действие
Рисунок АА.13 — Пример РОБОТА РОКО типа «РОБОТ-манипулятор» для нижних конечностей
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО или нижние конечности ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ПОЛНОЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
Пример 2 — РОБОТ РОКО типа «РОБОТ-манипулятор» для верхних конечностей.
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес верхней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие верхней конечности ПАЦИЕНТА.
ИЗГОТОВИТЕЛЬ может определить детали системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ОБЩУЮ НАГРУЗКУ на указанную деталь как вес верхней конечности ПАЦИЕНТА, вес части системы приведения в действие, поддерживаемой указанной деталью, включая общий вес ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, и максимальное выходное усилие верхней конечности ПАЦИЕНТА.
ИЗГОТОВИТЕЛЬ может определить детали опорной системы, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес верхней конечности ПАЦИЕНТА, вес системы приведения в действие, включая общий вес ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ, вес той части опорной системы, которая поддерживается указанной деталью, и максимальное выходное усилие верхней конечности ПАЦИЕНТА.
В данном примере опорная система для ПАЦИЕНТА (т. е. стул, изображенный на рисунке АА. 14) является частью РОБОТА РОКО, которая статически и динамически нагружена весом всего тела ПАЦИЕНТА, поэтому специальные требования 9.8.3 общего стандарта применяют к опорной системе. Это связано с тем, что ее механическая неисправность, вероятно, представляет собой неприемлемый РИСК.
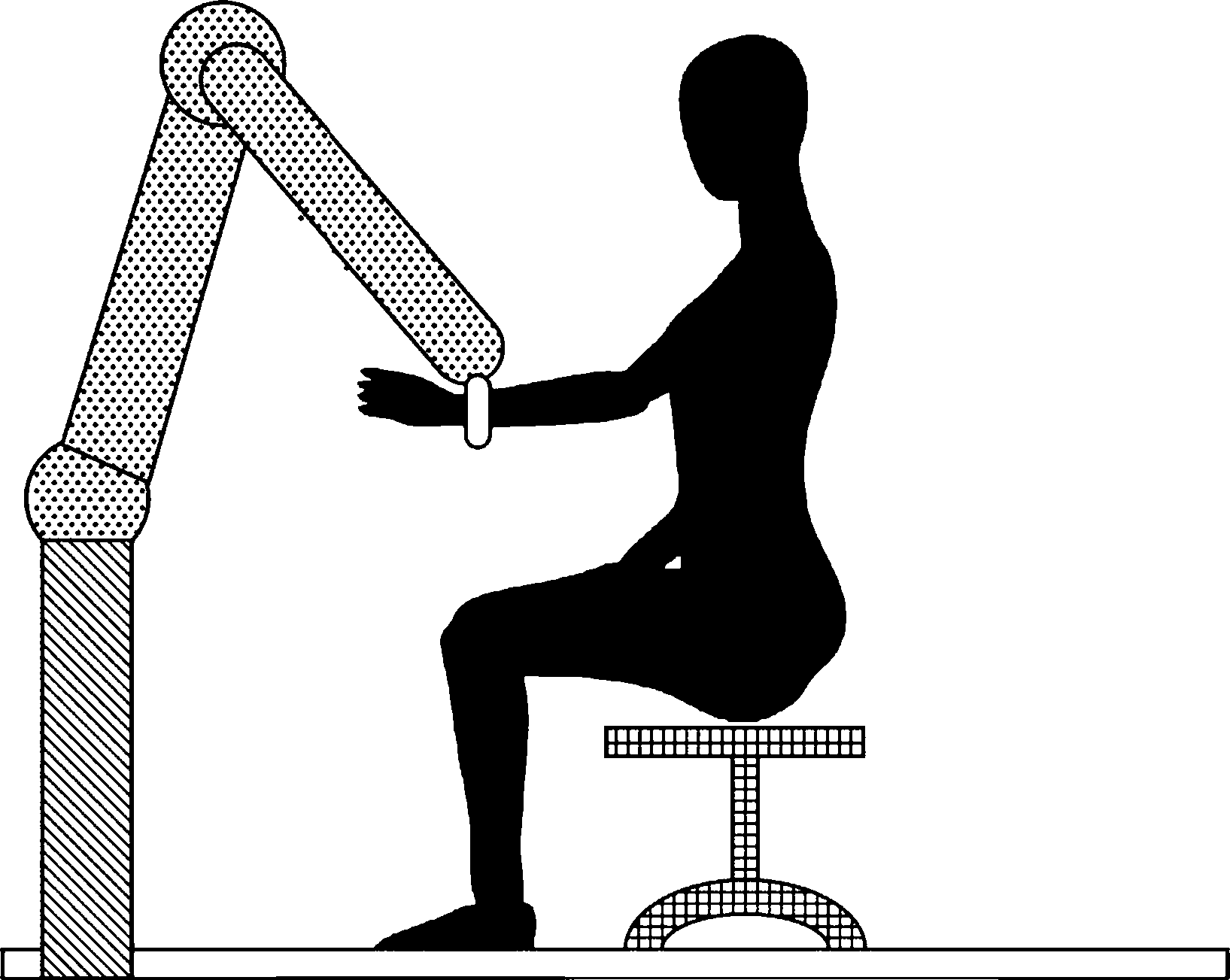
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
ОПОРНАЯ СИСТЕМА;
ОПОРНАЯ СИСТЕМА для ПАЦИЕНТА (см. 9.8.3 общего стандарта);
—система приведения в действие
Рисунок АА.14 — Пример РОБОТА РОКО типа «РОБОТ-манипулятор» для верхних конечностей
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО или верхние конечности ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ПОЛНОЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если предел прочности при растяжении материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
Пример 3 — РОБОТ РОКО типа «экзоскелет» для верхних конечностей.
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь, как вес части верхней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие верхней конечности ПАЦИЕНТА на указанную деталь.
ИЗГОТОВИТЕЛЬ может определить детали системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части верхней конечности ПАЦИЕНТА, вес части системы приведения в действие, поддерживаемой указанной деталью, включая общий вес ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ (ЧАСТЕЙ), и максимальное выходное усилие верхней конечности ПАЦИЕНТА на указанную деталь.
ИЗГОТОВИТЕЛЬ может определить детали опорной системы, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ОБЩУЮ НАГРУЗКУ на указанную деталь как вес верхней конечности ПАЦИЕНТА, вес системы приведения в действие, включая общий вес ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ, вес той части опорной системы, которая поддерживается указанной деталью, и максимальное выходное усилие верхней конечности ПАЦИЕНТА.
В данном примере опорная система для ПАЦИЕНТА (т. е. стул, изображенный на рисунке АА.15) является частью РОБОТА РОКО, которая статически и динамически нагружена весом всего тела ПАЦИЕНТА, поэтому специальные требования 9.8.3 общего стандарта применимы к опорной системе. Это связано с тем, что ее механическая неисправность, вероятно, представляет собой неприемлемый РИСК.
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО и верхние конечности ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ОБЩЕЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
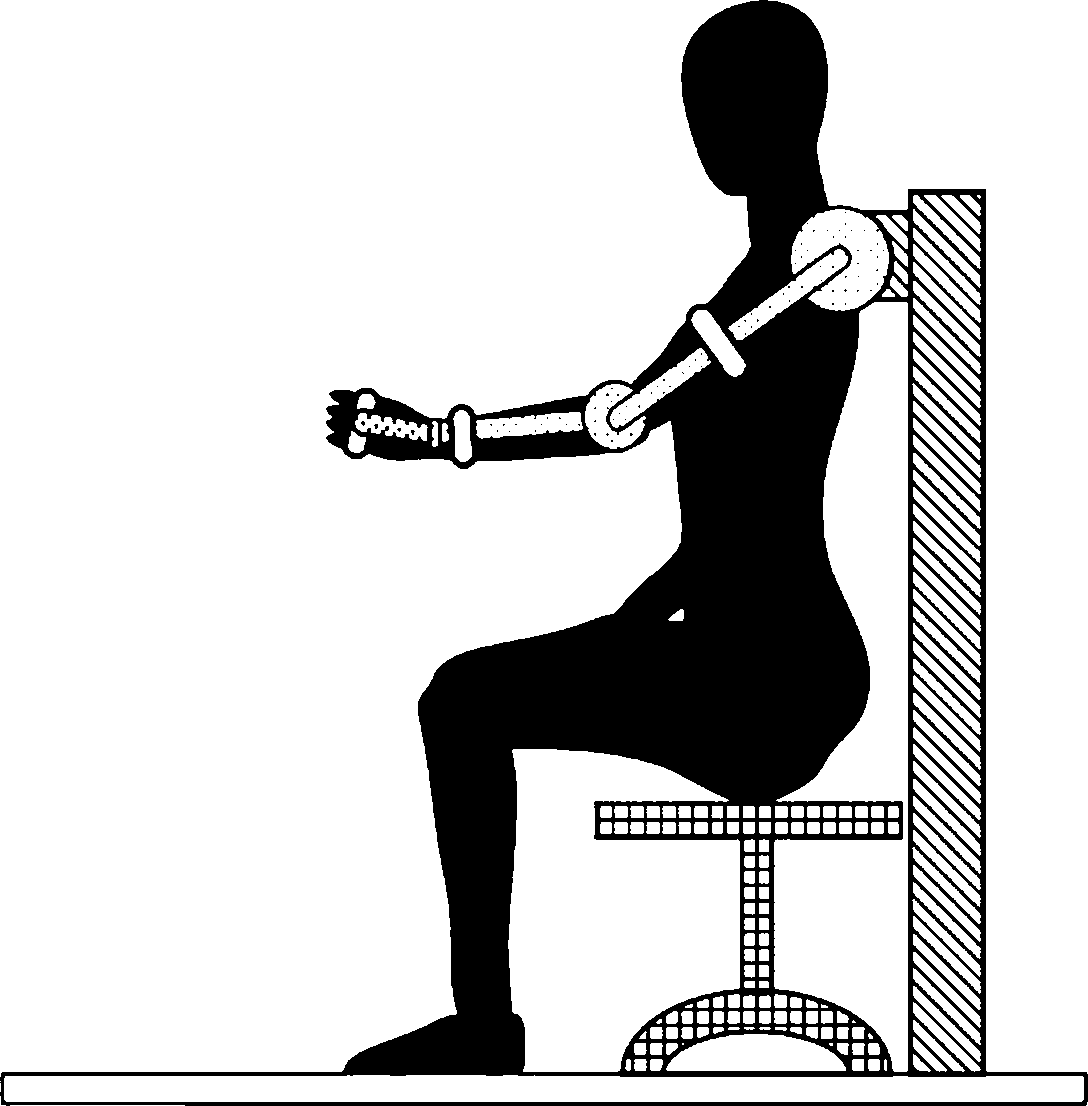
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
ОПОРНАЯ СИСТЕМА;
— ОПОРНАЯ СИСТЕМА для ПАЦИЕНТА (см. 9.8.3 общего стандарта);
— система приведения в действие
Рисунок АА.15 — Пример РОБОТА РОКО типа «экзоскелет» для верхних конечностей
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
Пример 4 — РОБОТ РОКО типа «экзоскелет» для коленного сустава (см. рисунок АА.16).

— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
—система приведения в действие
Рисунок АА.16 — Пример РОБОТА РОКО типа «экзоскелет» для коленного сустава
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части нижней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие коленного сустава ПАЦИЕНТА на указанную деталь
ИЗГОТОВИТЕЛЬ может определить детали системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части нижней конечности ПАЦИЕНТА, вес части системы приведения в действие, поддерживаемой указанной деталью, включая общий вес ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, и максимальное выходное усилие коленного сустава ПАЦИЕНТА на указанную деталь.
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО и коленный сустав ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ОБЩЕЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А таблицы 21 общего стандарта применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
Пример 5 — РОБОТ РОКО типа мягких искусственных мышц для коленного сустава (см. рисунок АА.17).
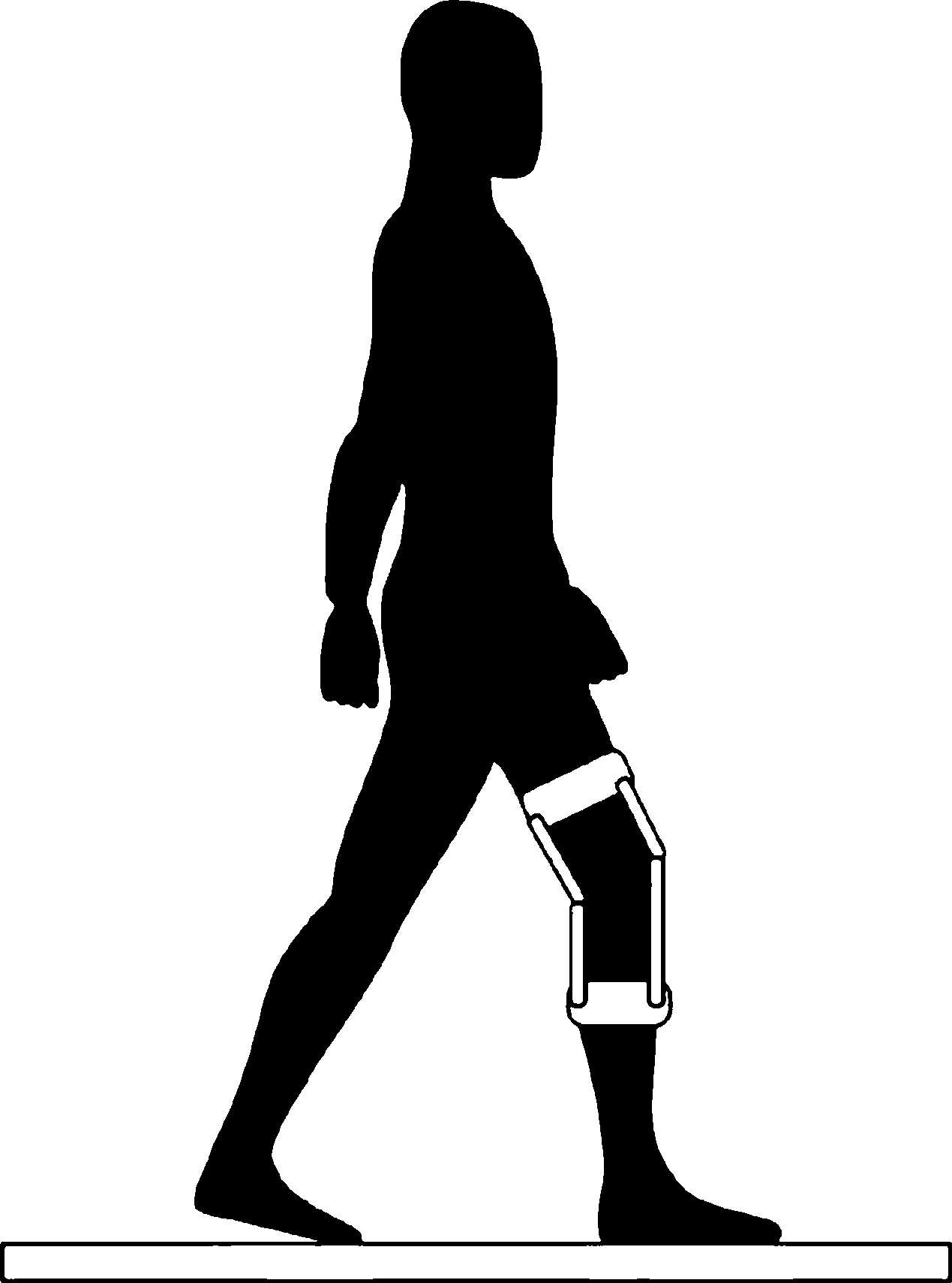
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ
Рисунок АА.17 — Пример РОБОТА РОКО типа мягких искусственных мышц для коленного сустава
Вокруг колена расположены искусственные мышцы, которые действуют как сгибатели и разгибатели. В данном примере мягкие искусственные мышцы касаются тела ПАЦИЕНТА, чтобы передавать выходное усилие. Следовательно, они являются ПРИВОДНЫМИ РАБОЧИМИ ЧАСТЯМИ, а также системами приведения в действие.
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ (а также системы приведения в действие), выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части нижней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие коленного сустава ПАЦИЕНТА на указанную деталь.
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО и коленный сустав ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ПОЛНОЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21. Уровень прочности конструкции, приведенный в строке 1 таблицы 21 общего стандарта, может применяться из-за удлинения. В 9.8.2 приложения А общего стандарта приведено обоснование того, почему строка 1 таблицы 21 общего стандарта применима к удлиняющимся неметаллическим материалам.
Пример 6 — ШАГАЮЩИЙ РОБОТ РОКО типа «экзоскелет» для нижних конечностей (рисунок АА.18).
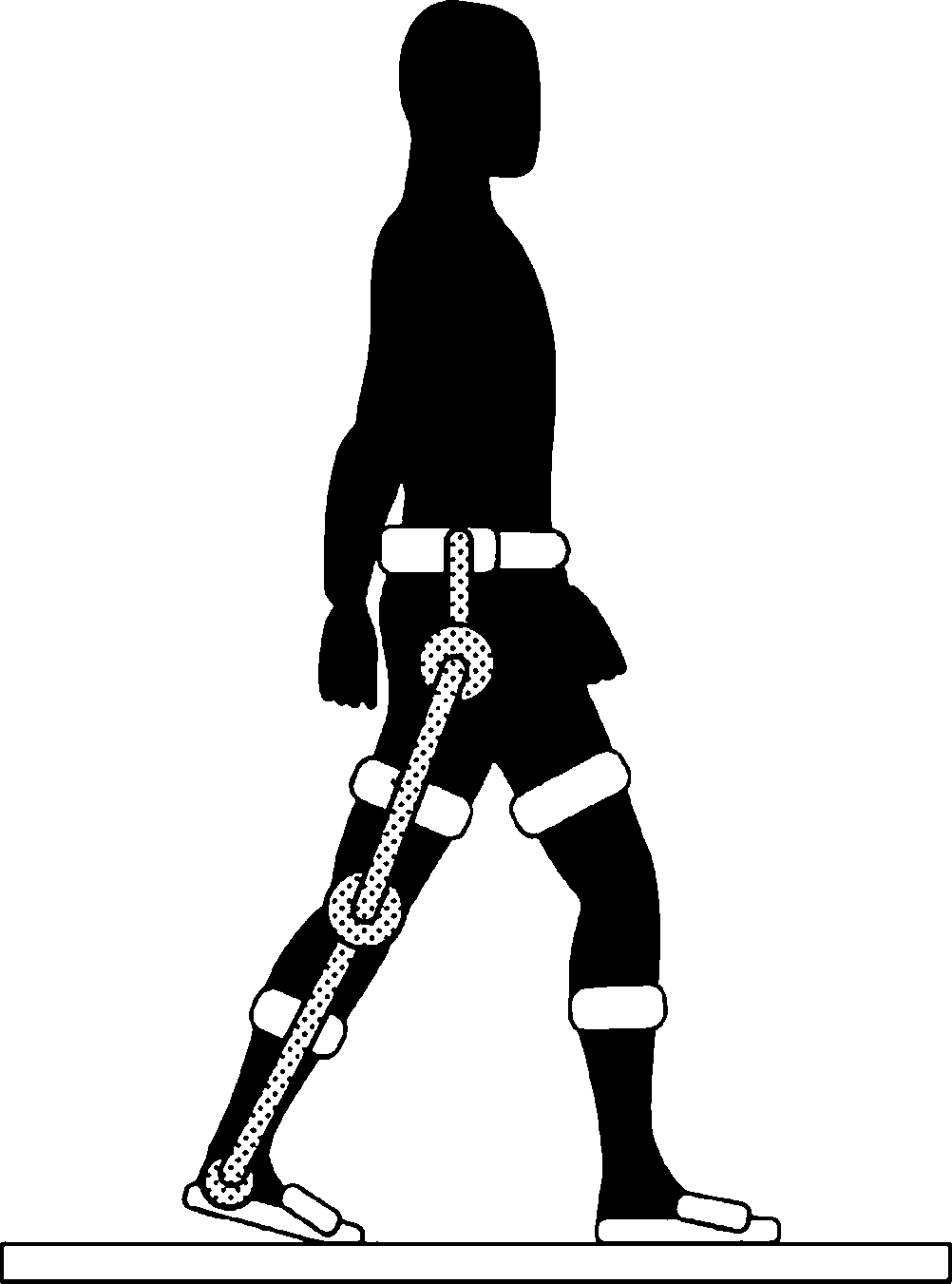
— ПАЦИЕНТ; — ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
—система приведения в действие
Рисунок АА.18 — Пример ШАГАЮЩЕГО РОБОТА РОКО типа «экзоскелет»
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части нижней конечности ПАЦИЕНТА, вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью, и максимальное выходное усилие нижней конечности ПАЦИЕНТА на указанную деталь.
ИЗГОТОВИТЕЛЬ может определить детали системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес части нижней конечности ПАЦИЕНТА, вес части системы приведения в действие, поддерживаемой указанной деталью, включая общий вес ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ (ЧАСТЕЙ), и максимальное выходное усилие нижней конечности ПАЦИЕНТА.
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда части РОБОТА РОКО и нижние конечности ПАЦИЕНТА движутся с незначительной скоростью.
Исходя из указанной информации по ПОЛНОЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
Примечания
1 Технология сохранения устойчивости ПАЦИЕНТА и РОБОТА РОКО и предотвращения падения еще не была разработана в системе с совместным управлением, такой как в данном примере. Для сохранения устойчивости, как правило, допускается использовать дополнительное оборудование, такое как костыли, ходунки, поручни и/или система для поддержки веса тела. Кроме того, также, как правило, требуется помощь ОПЕРАТОРА (терапевта) для сохранения устойчивости. Если требуется дополнительное оборудование, ИЗГОТОВИТЕЛЬ может определить, является ли РИСК механической неисправности системы приведения в действие неприемлемым или нет. В ОЦЕНКЕ РИСКА также целесообразно учитывать, что произойдет после утраты или ухудшения приведения в действие из-за механической неисправности. Такая система поддержки массы тела может включать в себя подвесную систему.
2 Воздействие части веса ПАЦИЕНТА может быть направлено вниз на ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ, и это может увеличить ПОЛНУЮ НАГРУЗКУ на нижнюю часть системы приведения в действие. В данном примере повышенная нагрузка может быть небольшой при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, поскольку нагрузка на ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ возникает из-за некоторой степени несоосности между ПАЦИЕНТОМ и РОБОТОМ РОКО, которая естественным образом уменьшается во время процедуры крепления и при использовании. ИЗГОТОВИТЕЛЬ может считать, что нагрузка включена в КОЭФФИЦИЕНТ БЕЗОПАСНОСТИ.
3 Если нижняя часть системы приведения в действие предназначена для прямого контакта с полом во время ходьбы при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, ИЗГОТОВИТЕЛЬ может считать ПОЛНУЮ НАГРУЗКУ на нижнюю часть пиковой силой реакции пола. Пик силы реакции пола при ходьбе человека до 1,5 раза превышает вес тела даже при спуске по лестнице. Следовательно, ИЗГОТОВИТЕЛЬ может применить 1,5-кратный или менее вес РОБОТА РОКО для ПОЛНОЙ НАГРУЗКИ на нижнюю часть в соответствии с его ПРЕДУСМОТРЕННЫМ ПРИМЕНЕНИЕМ. Если ноги ПАЦИЕНТА наступают на нижнюю часть, можно учитывать массу ПАЦИЕНТА.
Пример 7 — РОБОТ РОКО для поддержания вертикального равновесия.
Поддержание вертикального равновесия является частью ДВИГАТЕЛЬНЫХ ФУНКЦИЙ. Опорные усилия через платформу и рукоятку (ПРИВОДНУЮ РАБОЧУЮ ЧАСТЬ, как показано на рисунке АА.19) активно управляются, чтобы позволить ПАЦИЕНТУ сохранять вертикальное положение. Таким образом, ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ обеспечивает активно управляемое физическое взаимодействие с ПАЦИЕНТОМ, связанное с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ ПАЦИЕНТА, что соответствует термину, определенному в 201.3.209.
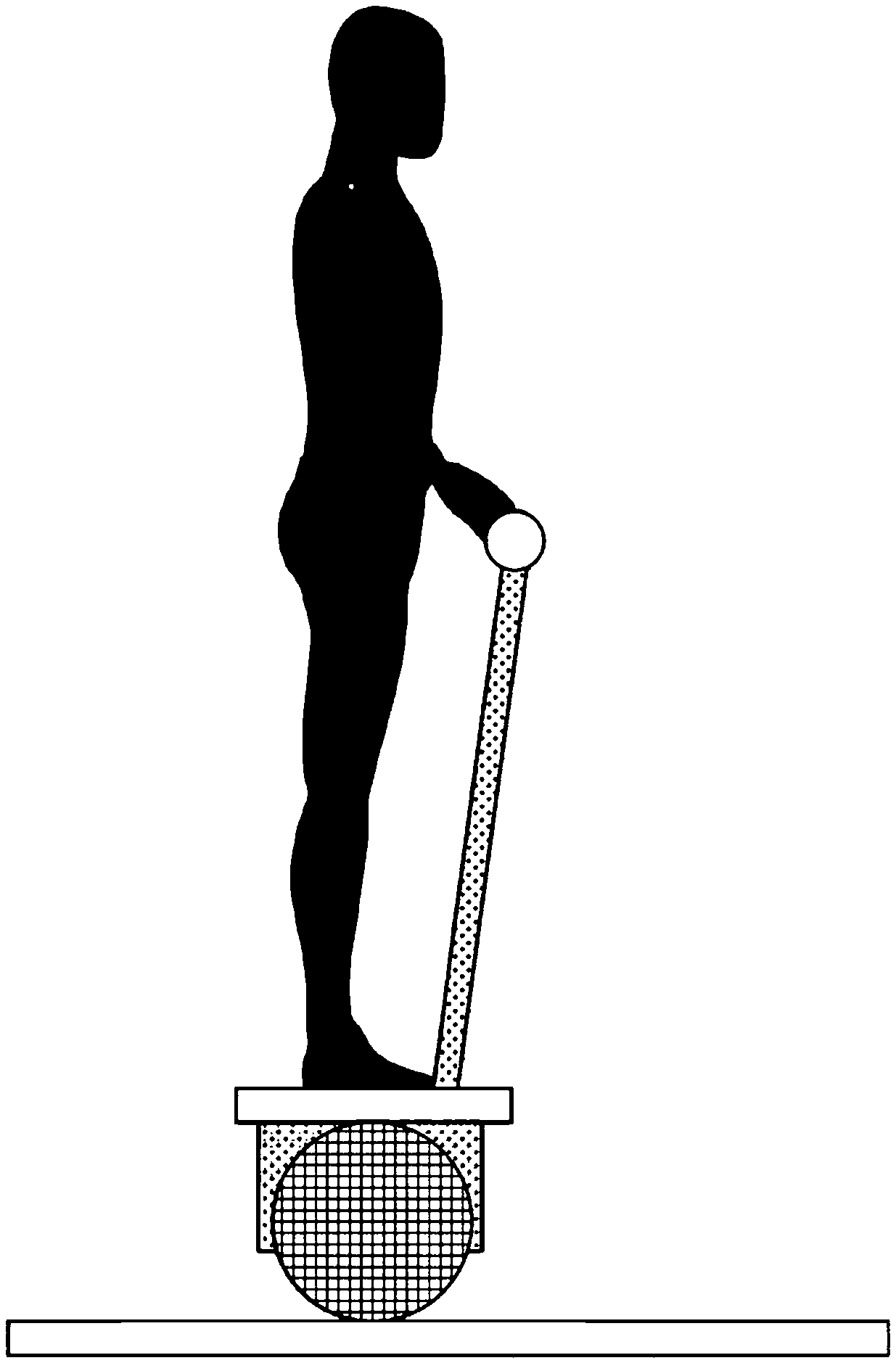
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
ОПОРНАЯ СИСТЕМА для ПАЦИЕНТА (см. 9.8.3 общего стандарта);
—система приведения в действие
Примечание —Для обеспечения ОСНОВНОЙ БЕЗОПАСНОСТИ может потребоваться МЕХАНИЧЕСКОЕ ЗАЩИТНОЕ УСТРОЙСТВО
Рисунок АА.19 — Пример РОБОТА РОКО для поддержания равновесия
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ или системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес ПАЦИЕНТА, вес части РОБОТА РОКО, которая поддерживается указанной деталью, и максимальную динамическую нагрузку из-за движения РОБОТА РОКО.
В данном примере опорная система для ПАЦИЕНТА (т. е. вал двигателя, ось, шины, платформа и рукоятка, приведенные на рисунке АА.19) является частью РОБОТА РОКО, которая статически и динамически нагружена весом всего тела ПАЦИЕНТА; поэтому специальные требования 9.8.3 общего стандарта применяют к опорной системе. Это связано с тем, что ее механическая неисправность, вероятно, представляет собой неприемлемый РИСК.
Может оказаться необходимым включить силы инерции для определения ПОЛНЫХ НАГРУЗОК, когда РОБОТ РОКО движется с незначительной скоростью.
Исходя из указанной информации по ОБЩЕЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если ПРЕДЕЛ ПРОЧНОСТИ ПРИ РАСТЯЖЕНИИ материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
Примечания
1 Если для предотвращения падения необходимо дополнительное оборудование, такое как система поддержки веса тела, ИЗГОТОВИТЕЛЬ может определить, является ли РИСК механической неисправности системы приведения в действие неприемлемым или нет. В ОЦЕНКЕ РИСКА также целесообразно учитывать, что произойдет после утраты или ухудшения приведения в действие из-за механической неисправности. Такая система поддержки веса тела может включать в себя подвесную систему.
2 Вес РОБОТА РОКО и/или вес ПАЦИЕНТА определяют на основе их массы и наклона тела при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ.
3 ИЗГОТОВИТЕЛЬ может считать, что валы двигателя не подвержены износу, если они опираются на один или несколько подшипников.
Пример 8 — РОБОТ РОКО с поддержкой веса тела и функцией сопровождения ходьбы.
Опорная функция для ног как подфункция ходьбы — это ДВИГАТЕЛЬНАЯ ФУНКЦИЯ. Опорное усилие через бандаж (ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ, как показано на рисунке АА.20) активно управляется, чтобы обеспечивать ходьбу ПАЦИЕНТА (удержание ПАЦИЕНТА в вертикальном положении во время ходьбы) и не нарушать характер походки. Таким образом, ПРИВОДНАЯ РАБОЧАЯ ЧАСТЬ обеспечивает активно управляемое физическое взаимодействие с ПАЦИЕНТОМ, связанное с ДВИГАТЕЛЬНЫМИ ФУНКЦИЯМИ ПАЦИЕНТА, что соответствует термину, определенному в 201.3.209.
— ПАЦИЕНТ;
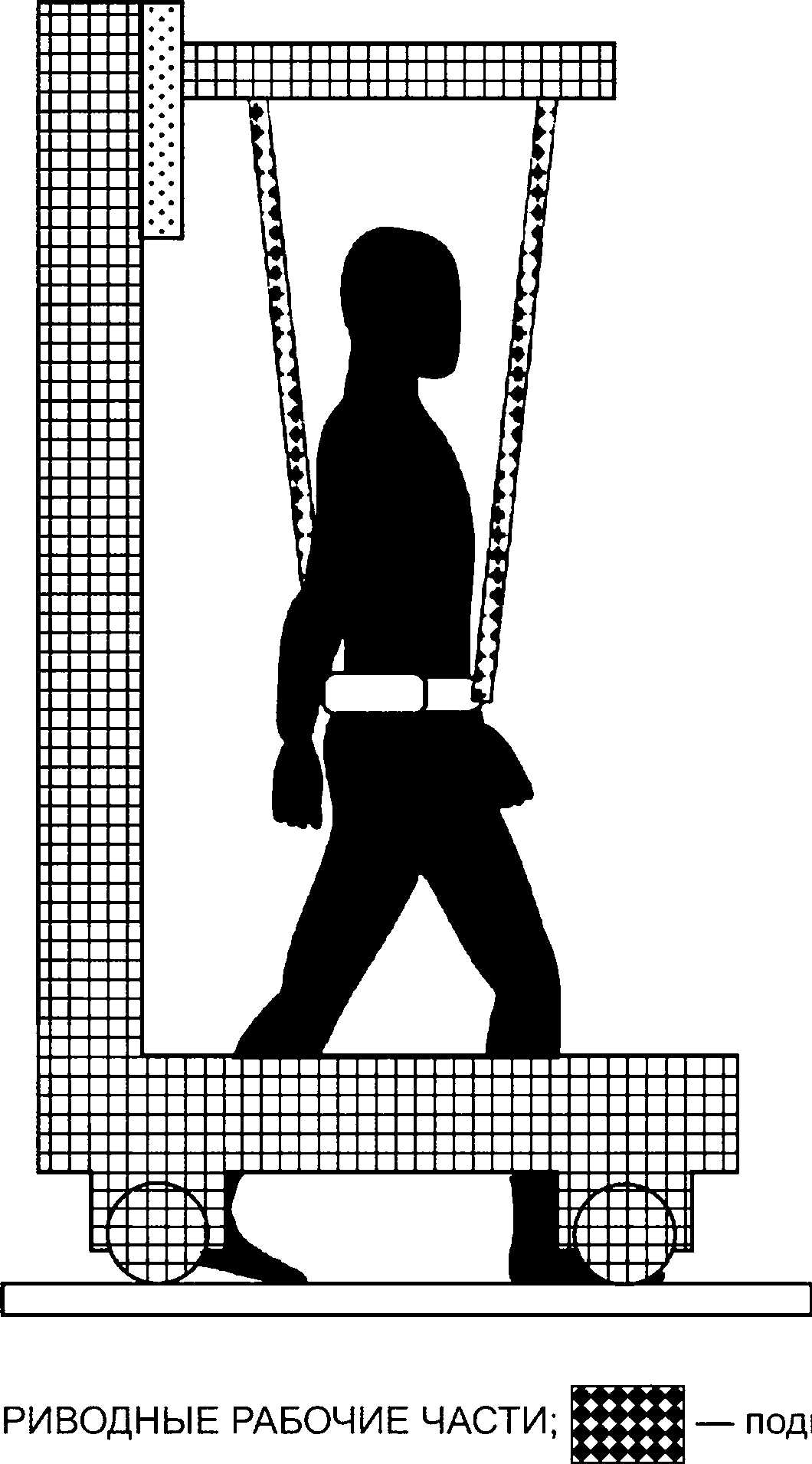
система для ПАЦИЕНТА;
ОПОРНАЯ СИСТЕМА для ПАЦИЕНТА (см. 9.8.3 общего стандарта);
— система приведения в действие
Рисунок АА.20 — Пример РОБОТА РОКО с поддержкой веса тела и функцией сопровождения ходьбы
ИЗГОТОВИТЕЛЬ может определить детали ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как общий вес ПАЦИЕНТА или часть веса ПАЦИЕНТА, которая должна поддерживаться устройством, и вес части ПРИВОДНОЙ РАБОЧЕЙ ЧАСТИ, которая поддерживается указанной деталью.
ИЗГОТОВИТЕЛЬ может определить детали опорной системы, подвесной системы или системы приведения в действие, выход из строя которых может привести к неприемлемому РИСКУ. ИЗГОТОВИТЕЛЬ может определить ПОЛНУЮ НАГРУЗКУ на указанную деталь как вес ПАЦИЕНТА (или часть этого веса), вес части системы приведения в действие, включая общий вес ПРИВОДНЫХ РАБОЧИХ ЧАСТЕЙ, вес части опорной системы, поддерживаемой указанной деталью, и вес части подвесной системы, которая подвешена на указанной детали.
В данном примере опорная система для ПАЦИЕНТА и подвесная система для ПАЦИЕНТА являются частями РОБОТА РОКО и статически и динамически нагружены весом всего тела ПАЦИЕНТА, поэтому специальные требования 9.8.3 общего стандарта применимы к опорной системе. Это связано с тем, что ее механическая неисправность, вероятно, представляет собой неприемлемый РИСК.
Может оказаться необходимым включить силы инерции для определения ОБЩИХ НАГРУЗОК, когда части РОБОТА РОКО или ПАЦИЕНТ движутся с незначительной скоростью.
Исходя из указанной информации по ПОЛНОЙ НАГРУЗКЕ, ИЗГОТОВИТЕЛЬ должен иметь возможность более точно рассчитать внешние силы. Случай А, приведенный в таблице 21 общего стандарта, применяют, если предел прочности при растяжении материала и все ожидаемые внешние силы поддаются количественному определению и точно известны. В противном случае применяют случай В, приведенный в таблице 21.
ПОЛНАЯ НАГРУЗКА на механизм блокировки или концевой упор (ограничитель перехода через крайнее положение) может быть определена таким же образом, как и для других частей опорной системы или системы приведения в действие. Однако ИЗГОТОВИТЕЛЬ должен позаботиться о том, чтобы соответствие минимальному КОЭФФИЦИЕНТУ БЕЗОПАСНОСТИ, приведенному в таблице 21 общего стандарта, не всегда означало прохождение испытания ограничителя перехода через крайнее положение. При испытании ограничителя перехода через крайнее положение, указанном в 9.2.3.2 общего стандарта, ограничитель для НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения должен выдерживать ударные нагрузки при достижении крайнего положения.
201.15.3.1 Общие положения
Механические испытания согласно 15.3.1 общего стандарта (и указания к ним) подходят для адаптированного определения НОСИМОГО НА ТЕЛЕ изделия. В настоящем стандарте НОСИМОЕ НА ТЕЛЕ изделие является прямой разновидностью ПЕРЕНОСНЫХ изделий (вместо прямой разновидности ТРАНСПОРТИРУЕМЫХ изделий, как в общем стандарте). Хотя испытания на падение для ПЕРЕНОСНЫХ и НОСИМЫХ НА ТЕЛЕ изделий различаются, условия испытаний на падение НОСИМЫХ НА ТЕЛЕ изделий (15.3.4.1) более строгие, чем для ПЕРЕНОСНЫХ изделий (15.3.4.2). Следовательно, испытание на падение (15.3.4.1) для НОСИМЫХ НА ТЕЛЕ изделий следует применять только для НОСИМЫХ НА ТЕЛЕ РОБОТОВ РОКО. Для ШАГАЮЩИХ РОБОТОВ РОКО испытание на неосторожное обращение было сочтено неприемлемым в том виде, как оно определено для колесных ТРАНСПОРТИРУЕМЫХ изделий. Для ПЕРЕДВИЖНЫХ РОБОТОВ РОКО на колесах (следовательно, не ШАГАЮЩИХ) применяется испытание на неосторожное обращение. Например, колесная транспортировочная рама/стойка для ШАГАЮЩИХ РОБОТОВ РОКО должна выдержать испытание на неосторожное обращение.
202.4.3 Общие условия проведения испытаний
Дополнение соответствует требованию, установленному в ГОСТР МОК 60601-1-2—2014, 4.2. Испытания УСЛОВИЙ ЕДИНИЧНОГО НАРУШЕНИЯ в среде с ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ нецелесообразно. Однако явно данные испытания УСЛОВИЙ ЕДИНИЧНОГО НАРУШЕНИЯ не исключены в ГОСТ Р МЭК 60601-1-2.
Определенные УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ могут оказать существенное неблагоприятное влияние на характеристики электромагнитной совместимости (ЭМС) МЭИ или МЭС. Некоторые методы борьбы с ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ позволяют перенаправить помехи на землю или рассеивать их в компонентах электрической схемы. Если ПРОВОД ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ оборван или смоделирован отказ компонента в фильтре ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ во время испытаний на ЭМС, то выполнение требований ГОСТ Р МЭК 60601-1-2 к испытаниям на ЭМС должно быть крайне затруднительно. Поэтому испытания на ЭМС необходимо выполнять при НОРМАЛЬНЫХ УСЛОВИЯХ, а не в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
Если бы ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ, заданные как ИСПЫТАТЕЛЬНЫЕ УРОВНИ ПОМЕХОУСТОЙЧИВОСТИ в ГОСТ Р МЭК 60601-1-2, считались УСЛОВИЯМИ ЕДИНИЧНОГО НАРУШЕНИЯ, то требования, приведенные в 4.2, можно было бы интерпретировать как означающие, что испытания на ПОМЕХОУСТОЙЧИВОСТЬ МЭИ и МЭС не следует выполнять. Поскольку они считаются репрезентативными для условий эксплуатации, ИСПЫТАТЕЛЬНЫЕ УРОВНИ ПОМЕХОУСТОЙЧИВОСТИ, определенные в ГОСТ Р МЭК 60601-1-2, не следует рассматривать как УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ в контексте 4.2.
Существует вероятность, что УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ может возникнуть в сочетании с ожидаемыми ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ, что приведет к возникновению ОПАСНОСТИ, или УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ может иметь место в средствах защиты от ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ, что также может привести к возникновению ОПАСНОСТИ. Данные ОПАСНОСТИ следует учитывать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
208 Общие требования, испытания и руководящие указания по применению систем сигнализации МЕДИЦИНСКИХ ЭЛЕКТРИЧЕСКИХ ИЗДЕЛИЙ и МЕДИЦИНСКИХ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
Если РОБОТЫ РОКО снабжены СИСТЕМОЙ СИГНАЛИЗАЦИИ в соответствии с ГОСТ IEC 60601-1-8, ИЗГОТОВИТЕЛЬ должен уделять особое внимание СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, чтобы определить способность ОПЕРАТОРА осознавать ОПАСНУЮ СИТУАЦИЮ, вызвавшую АВАРИЙНОЕ СОСТОЯНИЕ, и надлежащим образом реагировать для недопущения неприемлемого РИСКА.
Приложение ВВ (справочное)
Указания по СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ и примеры
ВВ.1 Общие положения
Данное приложение содержит указания по применению концепции СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ при проектировании РОБОТА РОКО. Представлена краткая история концепции СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в других отраслях, чтобы помочь ИЗГОТОВИТЕЛЮ понять ее значение и растущий уровень важности. Даны рекомендации, как поддерживать и оценивать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ. В заключительном пункте приведены примеры РОБОТОВ РОКО, демонстрирующие, как можно применять концепцию СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
ВВ.2 Краткая информация о СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ становится все более важной в динамических системах по мере увеличения сложности или уровня автономности, что приводит к потенциальному отсутствию или потере СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Важность СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ можно оценить и понять, взглянув на историю проектирования систем и несчастных случаев в других отраслях.
С конца восьмидесятых годов двадцатого века во многих отраслях постепенно стали преобладать методы автоматизации и компьютеризации. В частности, в эту революцию была вовлечена авиационная промышленность. Например, традиционная кабина, состоящая из множества циферблатов, требующих от пилота последовательного доступа к отображаемой информации, была заменена большими компьютерными экранами (кабина с экранной индикацией), чтобы обеспечить более высокую степень автономности в управлении полетом. Более 88 % авиационных происшествий, связанных с человеческим фактором, связаны с проблемами СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, в более чем 200 авиакатастрофах основным причинным фактором была плохая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ. За последние десятилетия в дизайне кабин самолетов произошли значимые изменения, основанные на признании важности СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ также отмечалась и анализировалась во многих областях медицины. Одна из областей наибольшего внимания — неотложная помощь. Работа скорой помощи в больницах полна стресса для всех врачей, медсестер и техников. Они не только сталкиваются с крайне динамичными, сложными и неопределенными ситуациями ПАЦИЕНТОВ, но и касаются борьбы за жизнь людей. Факторы, влияющие на результаты медицинской помощи и безопасность ПАЦИЕНТА, включают нетехнические навыки, такие как работа в команде, лидерство, принятие решений и СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ, где СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ является ядром, влияющим на принятие решений и эффективность.
СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ была определена как один из четырех основных нетехнических навыков в классификации нетехнических навыков анестезиолога и как инструмент оценки поведения и считается необходимой для трех других основных нетехнических навыков: принятие решений, работа в команде и управление задачами. Было продемонстрировано снижение периоперационных осложнений, меньшее количество инфекций в области хирургического вмешательства, меньшее количество незапланированных возвращений в операционную и снижение смертности. СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ была признана важнейшим компонентом принятия решений, который оказывает прямое влияние на эффективность оказания медицинской помощи.
Приведенные выше примеры из сфер авиации, неотложной помощи и анестезии иллюстрируют широко распространенное в отрасли признание важности СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. В этих и других отраслях было признано, что отсутствие учета СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ может привести к фатальным последствиям. Таким образом, в этих отраслях приняты методы учета СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ непосредственно на этапе проектирования системы или изделия и — повторно — во время проверки пригодности.
Методы автоматизации и компьютеризации использовались для разгрузки ОПЕРАТОРОВ в сложных динамических системах. Сложные динамические системы с определенным уровнем автономности, как правило, предназначены для выполнения разнообразных действий с помощью автоматических контуров управления и для принятия решений с помощью компьютерных программ. При использовании сложной динамической системы с определенным уровнем автономности ОПЕРАТОРЫ становятся администраторами, которые контролируют систему на основе поступающей от нее информации. Однако некоторая неисправность или неожиданное рассогласование сложной динамической системы могут привести к ОПАСНОЙ СИТУАЦИИ при эксплуатации. Если СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ не поддерживается должным образом, ОПЕРАТОРЫ могут иметь тенденцию игнорировать или откладывать свои действия в динамических ситуациях, так что ОПАСНАЯ СИТУАЦИЯ может стать неизбежной. Поэтому на этапе проектирования изделия следует учитывать все случаи, которые могут привести к потере СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. На рисунке ВВ.1 приведены причины потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Непосредственные причины означают, что эти причины наиболее близки к потере СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ или непосредственно ответственны за нее.
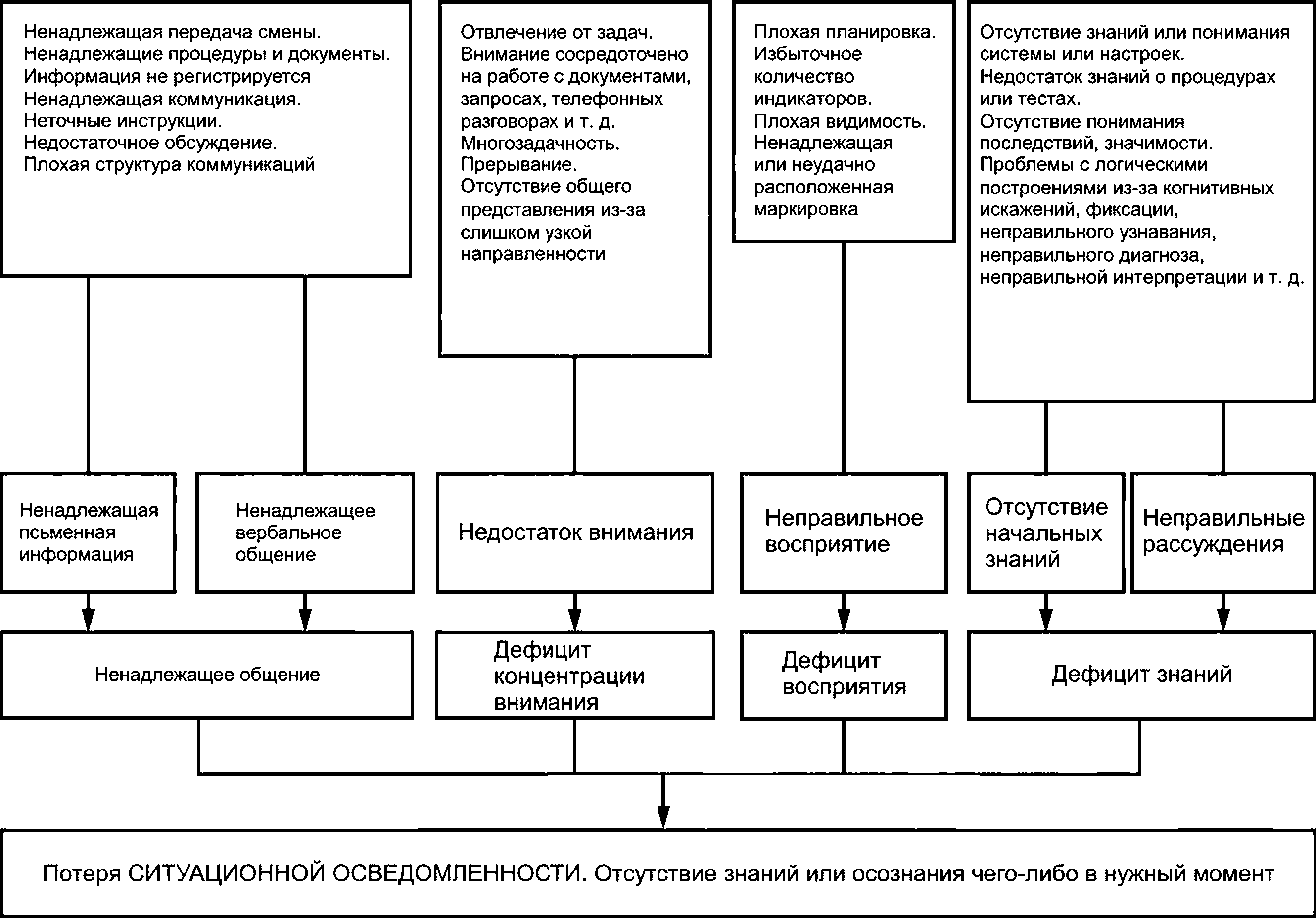
Рисунок ВВ.1 — Все непосредственные причины потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
Взаимовязь между СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ и существующими процессами приведена на рисунке ВВ.2, который был изменен по сравнению с рисунком А.4 ГОСТР МЭК 62366-1—2021. На рисунке внесены три изменения (отмечены красным цветом), которые демонстрируют два общих сценария, в которых СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ влияет на существующие процессы.
Менеджмент риска ГОСТ ISO 14971
Проектирование с учетом эксплуатационной пригодности
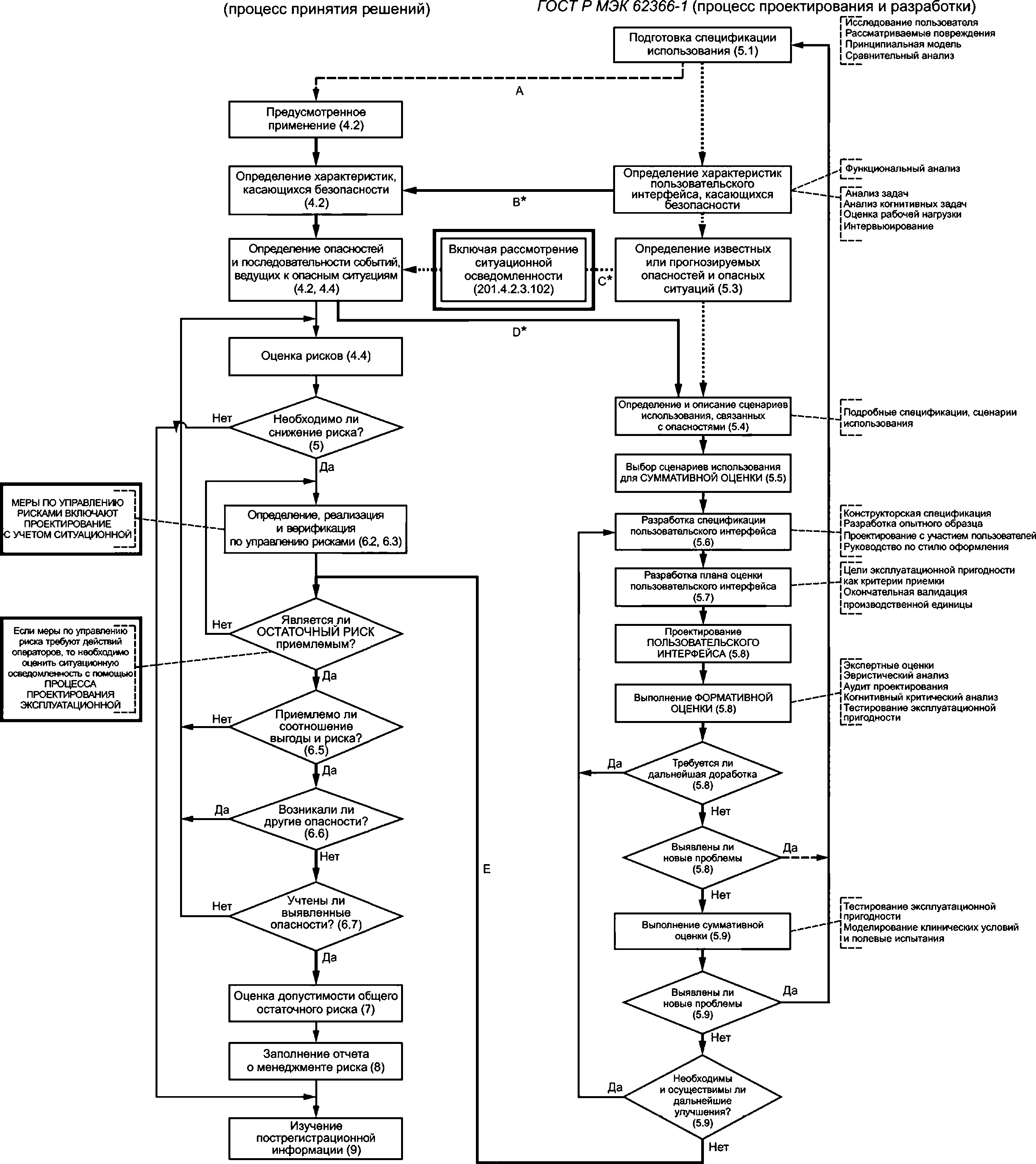
Рисунок ВВ.2 — Взаимосвязь между СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, ПРОЦЕССОМ МЕНЕДЖМЕНТА РИСКА (ГОСТ ISO 14971) и ПРОЦЕССОМ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ (ГОСТ РМЭК 62366-1)
Первый сценарий относится к ОПАСНОСТЯМ или ОПАСНЫМ СИТУАЦИЯМ, изначально определенным как часть спецификации ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА (ГОСТ Р МЭК 62366-1—2021, 5.2). Связь между ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТЬЮ и РИСКОМ теперь предусматривает особое внимание к СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ (201.4.2.3.102), а также примечание (ГОСТ ISO 14971—2021, 7.1 и 7.2), в обоих случаях в красных текстовых полях на рисунке ВВ.2, чтобы напомнить ИЗГОТОВИТЕЛЮ, что СРЕДСТВА УПРАВЛЕНИЯ РИСКАМИ должны быть разработаны для обеспечения СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
Второй сценарий относится к СРЕДСТВАМ УПРАВЛЕНИЯ РИСКОМ, определенным и внедренным для устранения ОПАСНОСТЕЙ и ОПАСНЫХ СИТУАЦИЙ, определенных как часть процесса МЕНЕДЖМЕНТА РИСКА (ГОСТ /SO 14971—2021, 7.1 и 7.2) после начальной спецификации использования и определения характеристик пользовательского интерфейса, связанных с безопасностью (ГОСТ Р МЭК 62366-1—2021, 5.1 и 5.2). В соответствии с новым примечанием (см. красные контуры на рисунке ВВ.2) для ГОСТ ISO 14971—2011, 7.3, ИЗГОТОВИТЕЛЬ должен знать, что если эти новые СРЕДСТВА УПРАВЛЕНИЯ РИСКОМ требуют СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, то ИЗГОТОВИТЕЛЬ должен вернуться к ПРОЕКТИРОВАНИЮ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ еще раз, чтобы гарантировать, что ОПЕРАТОР будет иметь надлежащую СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ для обеспечения эффективности УПРАВЛЕНИЯ РИСКОМ.
ВВ.З Проектирование РОБОТОВ РОКО с учетом СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
РОБОТ РОКО может быть сложной динамической системой с определенным уровнем автономности. Если отсутствие или потеря СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ приводит к неприемлемому РИСКУ, то варианты снижения РИСКА с помощью ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ и ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА заключаются в следующем:
а) проектирование РОБОТА РОКО с различными звуковыми/визуальными/тактильными сигналами, такими как сигналы тревоги/индикаторы/дисплеи, а также систематизация в последовательном порядке и по продолжительности для уменьшения дефицита внимания и восприятия;
б) проектирование РОБОТА РОКО на основе четкой и определенной логики, чтобы любой обученный ОПЕРАТОР мог делать вывод о том, почему РОБОТ РОКО ведет себя так, а не иначе, и как РОБОТ РОКО собирается действовать, чтобы уменьшить недостаток знаний;
в) создание достаточного числа стандартных операционных процедур (СОП), информации для ОПЕРАТОРА и, при необходимости, программ обучения (включая валидацию), чтобы обученный ОПЕРАТОР мог управлять РОБОТОМ РОКО посредством надлежащей коммуникации с РОБОТОМ РОКО, другими пользователями и окружающей средой.
Соответствие может быть проверено анализом ФАЙЛА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ и ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
ВВ.4 Оценка СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА
ВВ.4.1 Общие положения
Для оценки эффективности выполнения принципов проектирования, приведенных в пункте ВВ.З, необходимо оценить СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ ОПЕРАТОРОВ РОБОТОВ РОКО в рамках ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. Как правило, ОПЕРАТОРАМИ РОБОТОВ РОКО могут выступать врачи, терапевты или ПАЦИЕНТЫ. Поскольку эти разные типы ОПЕРАТОРОВ могут иметь разную подготовку, образование или способности, они могут иметь разные элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ и измерения СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Также рекомендуется учитывать все три уровня СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ: восприятие, понимание и прогнозирование, как описано в приложении АА и на рисунке АА.2. Эти три уровня должны быть отражены как в элементах СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, так и в содержании измерений СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
Полная ОЦЕНКА может включать анализ элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ и один или несколько способов фактических измерений с использованием методов, описанных в [5] (см. таблицу Е.1). Такие методы должны включать рассмотрение прогнозного уровня СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
ВВ.4.2 Анализ элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
ИЗГОТОВИТЕЛЬ РОБОТОВ РОКО может начать ОЦЕНКУ СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ с анализа элементов. Цель анализа элементов состоит в том, чтобы найти необходимые элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ трех уровней для использования РОБОТА РОКО, соответствующие ОПАСНОСТЯМ или ОПАСНЫМ СИТУАЦИЯМ при рассмотрении ОСНОВНОЙ БЕЗОПАСНОСТИ и ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК такого РОБОТА РОКО. В анализ элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ рекомендуется включать как минимум процедуры неструктурированного опроса и целеориентированного анализа задач. Такие неструктурированные опросы связаны с требованиями ГОСТ Р МЭК 62366-1—2021, 5.2 и 5.4. Результаты анализа элементов должны стать частью ФАЙЛА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
В отношении неструктурированных опросов, экспертам ИЗГОТОВИТЕЛЯ предлагается опросить ряд врачей и терапевтов с целью сбора информации обо всех возможных элементах СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Каждый опрос рекомендуется начинать с краткого ознакомления с принципами БЕЗОПАСНОСТИ и ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ целевого РОБОТА РОКО, а также понятиями СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Затем опрашиваемого следует попросить описать, какие элементы должны быть необходимы для создания «надлежащей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ» при использовании таких РОБОТОВ РОКО. Опрос также следует проводить, чтобы сосредоточиться на динамических элементах и постараться не включать заранее определенные медицинские знания или какие-либо статические процедуры (например, спросить о том, «о каких ситуациях ПАЦИЕНТ должен быть осведомлен, прежде чем ПАЦИЕНТ пройдет лечение с использованием РОБОТА РОКО» вместо того, чтобы спрашивать о том, «какие НАРУШЕНИЯ следует устранять с помощью РОБОТА РОКО»). Опрос может проходить как мозговой штурм, и проводящему опрос лицу предлагается задавать вопросы об элементах СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, касающихся всех трех уровней СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, если это возможно. После опросов все собранные возможные элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ классифицируют по трем уровням СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, как описано в приложении АА и на рисунке АА.2, и распределяют по лицам, которые должны иметь такие элементы (например, врачи, терапевты или ПАЦИЕНТЫ).
Чтобы создать «надлежащую СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ», опрос может быть совершенно независимым от фактической технологии, которая используется в РОБОТЕ РОКО (т. е. прототип не обязателен), и опрашиваемому не нужно быть знакомым с РОБОТОМ РОКО, но ему рекомендуется говорить о требуемой СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ для общего рассмотрения типа РОБОТА РОКО. Однако поскольку проектирование — это цикличный процесс, то неструктурированные опросы допускается проводить на более поздних этапах с использованием прототипа.
Чтобы убедиться, что вышеупомянутые элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, выявленные в ходе неструктурированных опросов, являются полными и соответствующими элементам СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ РОБОТА РОКО, экспертам ИЗГОТОВИТЕЛЕЙ рекомендуется провести целеориентированный анализ задач (ЦОАЗ) (см. рисунок ВВ.З).
МЕНЕДЖМЕНТ РИСКА
ГОСТ ISO 14971
См. ГОСТ ISO 14971-2011, 4.3 и 4.4
Может быть выведено из 4.2 и 4.3
Концепция СО не рассматривается явно в ГОСТ ISO 14971
1.0 Основная цель: снижение риска до приемлемого уровня | 1.1 Подцель: Снижение РИСКА I—конкретной и выявленной ОПАСНОСТИ I | Предполагаемое | Элементы СО: Необходимые элементы, которые помогают ОПЕРАТОРУ действовать, организованы:
| ||
Применение GDTA в анализе элементов СО | действие vi itzrvAi игн: Необходимые действия, которые должен [—предпринять оператор К для устранения конкретной выявленной | ОПАСНОСТИ | ф | |||
I | |||||
Существующие процессы
ПОЕКТИРОВАНИЕ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ
ГОСТ Р МЭК 62366-1
См. ГОСТ Р МЭК 62366-1-2021, 5.3 и 5.3
Может быть выведено из
5.1,5.2 и 5.3
Прогнозирование (уровень 3 элементов СО) не рассматривается явно в ГОСТ Р МЭК 62366-1
СО — СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ
Рисунок ВВ.З — Взаимосвязь между GDTA и ПРОЦЕССАМИ МЕНЕДЖМЕНТА РИСКА и ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ
В ЦОАЗ используется четырехуровневый подход, включающий следующее:
а) определение основных целей;
б) определение подцелей, которые необходимы для достижения основных целей;
в) определение действия ОПЕРАТОРА, которое необходимо предпринять для достижения подцелей, на основе решения, подкрепленного достаточной СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ;
г) определение элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, необходимых для принятия успешных решений и действий, как показано на рисунке ВВ.2.
Для РОБОТОВ РОКО основная цель 1.0 (см. рисунок ВВ.З) может быть определена как «снижение РИСКОВ, связанных с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, до приемлемого уровня». Подцели 1.Х могут быть установлены для каждой ОПАСНОСТИ или ОПАСНОЙ СИТУАЦИИ, определенных ИЗГОТОВИТЕЛЕМ, если ОПЕРАТОРЫ необходимы для наблюдения за выполнением задачи или для взаимодействия (т. е. для выполнения действий) с РОБОТОМ РОКО для снижения РИСКА до приемлемого уровня (см. дополнение в 201.4.2.3.102). На основе собранных возможных элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ могут потребоваться испытания на месте в отношении конкретных подцелей, чтобы назначить или определить, какие элементы относятся к какому уровню требуемой СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Различные типы ОПЕРАТОРОВ, такие как врачи по РЕАБИЛИТАЦИИ, терапевты и ПАЦИЕНТЫ, могут давать разные результаты ЦОАЗ.
Результаты элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ могут быть использованы в качестве контрольных точек для проверки того, был ли РОБОТ РОКО спроектирован и изготовлен в соответствии с принципами проектирования, приведенными в ВВ.З, или, если они связаны с ПОЛЬЗОВАТЕЛЬСКИМ ИНТЕРФЕЙСОМ, то они могут быть интегрированы в СПЕЦИФИКАЦИЮ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА (ГОСТ Р МЭК 62366-1—2021, 5.6) и использованы при ФОРМИРУЮЩЕМ ОЦЕНИВАНИИ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА (ГОСТ Р МЭК 62366-1—2021, 5.8), согласно определению в ГОСТ Р МЭК 62366-1.
ВВ.5 Примеры применения концепций СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ к РОБОТАМ РОКО
ВВ.5.1 Общие положения
Ниже представлены четыре примера РОБОТОВ РОКО, демонстрирующие, как концепции СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ можно применять для выявления ОПАСНОСТЕЙ или ОПАСНЫХ СИТУАЦИЙ, согласно 201.4.2.3.102.
В дополнение к ПРОЦЕССУ МЕНЕДЖМЕНТА РИСКА и ПРОЕКТИРОВАНИЮ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ (как показано на рисунке ВВ.2) элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ (как показано на рисунке ВВ.З) могут быть определены путем проведения неструктурированных опросов и ЦОАЗ. Неструктурированные опросы с участием ИЗГОТОВИТЕЛЕЙ РОБОТОВ РОКО и ОПЕРАТОРОВ (например, врача, терапевта или ПАЦИЕНТА) использовались для выявления ОПАСНОСТЕЙ или ОПАСНЫХ СИТУАЦИЙ, а также для определения соответствующих элементов СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. ЦОАЗ использовался для выявления и последующей классификации выявленных ОПАСНОСТЕЙ или ОПАСНЫХ СИТУАЦИЙ с соответствующими элементами СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, распределенными по трем уровням (восприятие, понимание и прогнозирование).
ВВ.5.2 Процесс проектирования РОБОТА РОКО для помощи ПАЦИЕНТУ в передвижении на открытом воздухе (ОКАЗАНИЕ МЕДИЦИНСКОЙ ПОМОЩИ ВНЕ МЕДИЦИНСКОЙ ОРГАНИЗАЦИИ)
Примечание —В этом примере ОШИБКА ПРИМЕНЕНИЯ создает ОПАСНУЮ СИТУАЦИЮ.
Данный пример РОБОТА РОКО предназначен для помощи ПАЦИЕНТУ в передвижении (например, при ходьбе или на коляске) на открытом воздухе при ОКАЗАНИИ МЕДИЦИНСКОЙ ПОМОЩИ ВНЕ МЕДИЦИНСКОЙ ОРГАНИЗАЦИИ. Данный пример демонстрирует необходимость рассмотрения как уровня 3 (прогнозирование), так и окружающей среды при оценке и рассмотрении СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ. Пример аналогичен вождению автомобиля и необходимости избегать остановки из-за того, что у вас закончился бензин. В данном примере рассмотрена только одна подцель.
Для каждого этапа в данном примере приведены ссылки на наиболее важные подпункты стандартов ГОСТ ISO 14971 и ГОСТР МЭК 62366-1, чтобы помочь согласовать этот пример с их процессами и блок-схемой, показанной на рисунке ВВ.2.
а) Определить ОПАСНУЮ СИТУАЦИЮ (ГОСТ ISO 14971—2021, 5.4, 5.5).
Если РОБОТ РОКО разрядится, то ПАЦИЕНТ может оказаться в затруднительном положении, что приведет к соответствующему ВРЕДУ.
б) Оценить РИСК и определить, необходимо ли его снижение (ГОСТ ISO 14971—2021, 5.5 и пункт 6).
Да. Необходимо снижение РИСКА.
в) Определить средство УПРАВЛЕНИЯ РИСКОМ (ГОСТ ISO 14971—2021, 7.1).
ОПЕРАТОР: планировать, а затем совершать любые прогулки на открытом воздухе, чтобы их можно было завершить до того, как разрядится аккумуляторная батарея.
г) Описать СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ и определить, нужно ли дополнительно учитывать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
Действие ОПЕРАТОРА является ЗАДАЧЕЙ для данного СЦЕНАРИЯ ИСПОЛЬЗОВАНИЯ. Если ОПЕРАТОР участвует в УПРАВЛЕНИИ РИСКОМ, то ИЗГОТОВИТЕЛЬ должен знать, способен ли ОПЕРАТОР отреагировать ожидаемым образом, чтобы УПРАВЛЯТЬ РИСКОМ исходя из доступной ему информации. Ответ на этот вопрос требует анализа возможностей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА (см. примечание, выделенное красным цветом на рисунке ВВ.2, рядом с ГОСТ ISO 14971—2021, 7.3).
Поскольку ОПЕРАТОР в данном примере участвует в УПРАВЛЕНИИ РИСКОМ, то в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ ИЗГОТОВИТЕЛЬ должен изучить, имеет ли место надлежащая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ.
Данный пример представляет собой СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ, СВЯЗАННЫЙ С ОПАСНОСТЬЮ.
д) Определить ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, которые могут возникнуть после потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в приведенном выше СЦЕНАРИИ ИСПОЛЬЗОВАНИЯ, например, с использованием ЦОАЗ (для выполнения требований 201.4.2.3.102), как показано в таблице ВВ.1.
Таблица ВВ.1 — Пример использования ЦОАЗ в ВВ.5.2
Основная цель | Подцель | Предполагаемое действие ОПЕРАТОРА | Элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ | |
Выявленная ОПАСНАЯ СИТУАЦИЯ | Способы снижения РИСКА | |||
1.0 Снизить РИСКИ, связанные с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, до приемлемого уровня | 1.1 ПАЦИЕНТ может оказаться в затруднительном положении, что приведет к соответствующему ВРЕДУ (например, в холодную погоду) | Избегать ситуаций, в которых аккумуляторная батарея может разрядиться, что может привести к затруднительному положению ПАЦИЕНТА | ПАЦИЕНТ планирует, а затем совершает любые прогулки на свежем воздухе, чтобы их можно было завершить до того, как разрядится аккумуляторная батарея | ПАЦИЕНТ Уровень 1 (восприятие): отмечает начальный уровень заряда батареи (т. е. перед началом прогулки) и предполагаемые условия эксплуатации (например, местность, температура, близость к зарядным устройствам) Уровень 2 (понимание): понимает, что, когда заряд будет исчерпан, РОБОТ перестанет двигаться. Понимает, что разные модели использования могут разряжать батареи с разной скоростью. Понимает, что различные условия будут влиять на энергопотребление (например, температура, уклон местности) Уровень 3 (прогнозирование): прогнозирует, когда разрядится батарея РОБОТА РОКО, на основе предполагаемого использования, и определяет стратегии для минимизации РИСКА остановки из-за разряда батареи |
Примечание — ГОСТ Р МЭК 60601-1—2022, 11.8, касается прерывания подачи питания, но предназначен для устранения немедленных последствий отключения питания (например, падение РОБОТА РОКО).
е) Реализовать УПРАВЛЕНИЕ РИСКОМ, измерить/указать, спроектировать и внедрить пользовательский интерфейс (ГОСТ ISO 14971—2021, 7.1, и ГОСТ Р МЭК 62366-1—2021, 5.6—5.8).
Характеристики ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА:
- указать ПАЦИЕНТУ оценку «оставшегося расстояния» на основе уровня заряда батареи и, возможно, также на основе условий использования и температуры;
- включить в инструкции по эксплуатации оценку расстояния или дальности действия, основанную на различных моделях использования, чтобы помочь ОПЕРАТОРУ/ПАЦИЕНТУ понять использование батареи в разных условиях (например, температура окружающей среды и уклон местности).
ж) Выполнить следующие этапы ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА и ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
ВВ.5.3 Процесс проектирования нескольких РОБОТОВ РОКО, используемых одновременно одним ОПЕРАТОРОМ (терапевтом)
Примечание — В данном примере ОПАСНАЯ СИТУАЦИЯ предшествует любой связанной с ней ОШИБКЕ ПРИМЕНЕНИЯ.
Данный пример основан на РОБОТЕ РОКО, предназначенном для использования в клинических условиях, в которых один ОПЕРАТОР (терапевт) наблюдает за несколькими ПАЦИЕНТАМИ, используя несколько РОБОТОВ РОКО одновременно (т. е. каждый ПАЦИЕНТ со своим собственным РОБОТОМ РОКО, при условии, что каждый РОБОТ РОКО представлен одной и той же моделью). В этом случае каждый ПАЦИЕНТ получает ограниченный контроль со стороны ОПЕРАТОРА или не получает его вообще. ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ могут быть определены в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА или в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. Данный пример демонстрирует, как устройство АВАРИЙНОГО ОСТАНОВА требует СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, и что в некоторых случаях невозможно обеспечить надлежащую СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ. В данном примере в ЦОАЗ рассматривается только одна подцель (хотя в целом может быть более одной подцели).
Для каждого этапа в данном примере приведены ссылки на наиболее важные подпункты стандартов ГОСТ ISO 14971 и ГОСТР МЭК 62366-1, чтобы помочь согласовать этот пример с их процессами и блок-схемой, показанной на рисунке ВВ.2.
а) Определить ОПАСНУЮ СИТУАЦИЮ (ГОСТISO 14971—2021, 5.4, 5.5).
РОБОТ РОКО может разгибать или сгибать сустав ПАЦИЕНТА слишком далеко и/или слишком быстро.
б) Оценить РИСК и определить, необходимо ли его снижение (ГОСТ ISO 14971—2021, 5.5 и пункт 6). Да. Необходимо снижение РИСКА.
в) Определить средство УПРАВЛЕНИЯ РИСКОМ (ГОСТ ISO 14971—2021, 7.1).
Терапевт: остановить движение РОБОТА РОКО, у которого возникла проблема (например, с помощью АВАРИЙНОГО ОСТАНОВА).
г) Описать СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ и определить, необходимо ли дополнительно учитывать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
Действие ОПЕРАТОРА является ЗАДАЧЕЙ для данного СЦЕНАРИЯ ИСПОЛЬЗОВАНИЯ. Если ОПЕРАТОР участвует в УПРАВЛЕНИИ РИСКОМ, то ИЗГОТОВИТЕЛЬ должен знать, способен ли ОПЕРАТОР отреагировать ожидаемым образом, чтобы УПРАВЛЯТЬ РИСКОМ исходя из доступной ему информации. Ответ на этот вопрос требует анализа возможностей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА (см. примечание, выделенное красным цветом на рисунке ВВ.2, рядом с ГОСТ ISO 14971—2021, 7.3).
Поскольку ОПЕРАТОР в данном примере участвует в УПРАВЛЕНИИ РИСКОМ, в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ ИЗГОТОВИТЕЛЬ должен изучить, имеет ли место надлежащая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ.
д) Определить ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, которые могут возникнуть после потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в приведенном выше СЦЕНАРИИ ИСПОЛЬЗОВАНИЯ, например с использованием ЦОАЗ (для выполнения требований 201.4.2.3.102), как показано в таблице ВВ.2.
Таблица ВВ.2 — Пример использования ЦОАЗ в ВВ.5.3
Основная цель | Подцель | Предполагаемое действие ОПЕРАТОРА | Элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ | |
Выявленная ОПАСНАЯ СИТУАЦИЯ | Способы снижения РИСКА | |||
1.0 Снизить РИСКИ, связанные с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, до приемлемого уровня | 1.1 РОБОТ РОКО может разгибать или сгибать сустав ПАЦИЕНТА, вызывая движения, выходящие за пределы его анатомических возможностей и/или слишком быстро | Обеспечивать безопасность при непредвиденном поведении РОБОТА РОКО | Терапевт останавливает движение РОБОТА РОКО, у которого возникла проблема | Терапевт Уровень 1 (восприятие): одновременный контроль нескольких РОБОТОВ РОКО. Уровень 2 (понимание): понимает, когда РОБОТ РОКО начал двигаться или вести себя непредвиденным образом. Уровень 3 (прогнозирование): способность предсказывать, каким должно быть движение/ поведение: если обнаруживается непредвиденное движение/поведение, предсказание серьезности ситуации позволит терапевту определить, как быстро ему следует реагировать (например, если он находится в другом конце помещения с другим ПАЦИЕНТОМ) |
е) Реализовать УПРАВЛЕНИЕ РИСКОМ, измерить/указать, спроектировать и внедрить ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС (ГОСТ ISO 14971—2021, 7.1, и ГОСТ Р МЭК 62366-1—2021, 5.6—5.8).
Характеристики ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА:
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой восприятия (см. ГОСТ Р МЭК 62366-1—2021, рисунок D.1); сигналы или индикация, информирующие об ОПАСНОЙ СИТУАЦИИ, должны быть воспринимаемыми и различимыми для ОПЕРАТОРА в конструкции ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА;
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой познания (понимания) (см. ГОСТ Р МЭК 62366-1—2021, рисунок D.1); ЭКСПЛУАТАЦИОННЫЕ ДОКУМЕНТЫ должны в достаточной степени описывать ОПАСНУЮ СИТУАЦИЮ таким образом, чтобы ОПЕРАТОР мог ее понять;
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой прогнозирования; ЭКСПЛУАТАЦИОННЫЕ ДОКУМЕНТЫ должны в достаточной степени описывать РОБОТА РОКО таким образом, чтобы ОПЕРАТОР мог предсказать будущее развитие ОПАСНОЙ СИТУАЦИИ.
Добавить устройство аварийного останова.
Обновить спецификацию пользовательского интерфейса, а затем спроектировать и внедрить пользовательский интерфейс.
ж) Выполнить следующие этапы ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА и ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
ВВ.5.4 Процесс проектирования РОБОТА РОКО, используемого для РЕАБИЛИТАЦИИ по указанию терапевта
Примечание — В данном примере вопрос СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ сосредоточен на ПАЦИЕНТЕ, а не на аппаратных средствах МЭИ.
В данном примере ОПЕРАТОРЫ включают ПАЦИЕНТА и обученного терапевта, который контролирует выполнение КЛИНИЧЕСКИХ ФУНКЦИЙ на ПАЦИЕНТЕ с помощью РОБОТА РОКО. ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, связанные с состоянием ПАЦИЕНТА, рассматриваются и определяются в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Данный пример демонстрирует, как ИЗГОТОВИТЕЛЬ снижает РИСК, обеспечивая СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ терапевта с помощью стандартной операционной процедуры (СОП), инструкций для ОПЕРАТОРА и/или программ обучения. В данном примере в ЦОАЗ рассмотрена только одна подцель (хотя в целом может быть более одной подцели).
Для каждого этапа в данном примере приведены ссылки на наиболее важные подпункты ГОСТ ISO 14971, чтобы помочь согласовать данный пример с их процессами и блок-схемой, показанной на рисунке ВВ.2.
а) Определить ОПАСНУЮ СИТУАЦИЮ (ГОСТ ISO 14971—2021, 5.4, 5.5).
Когда ПАЦИЕНТ находится в ненадлежащем для продолжения РЕАБИЛИТАЦИИ состоянии, он может получить травму.
б) Оценить РИСК и определить, необходимо ли УПРАВЛЕНИЕ РИСКОМ (ГОСТ ISO 14971—2021, 5.5 и пункт 6).
Да, УПРАВЛЕНИЕ РИСКОМ необходимо.
в) Определить средства УПРАВЛЕНИЯ РИСКОМ (ГОСТ ISO 14971—2021, 7.1).
Терапевт нажимает кнопку остановки, чтобы остановить РОБОТА РОКО, при необходимости вызывает скорую помощь, а затем освобождает ПАЦИЕНТА от креплений РОБОТА РОКО.
г) Если терапевт участвует в УПРАВЛЕНИИ РИСКОМ, то ИЗГОТОВИТЕЛЬ должен знать, способен ли терапевт отреагировать ожидаемым образом, чтобы УПРАВЛЯТЬ РИСКОМ исходя из доступной ему информации. Ответ на этот вопрос требует анализа возможностей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ терапевта (см. примечание, выделенное красным цветом на рисунке ВВ.2, рядом с ГОСТ ISO 14971—2021, 7.3).
Поскольку терапевт участвует в УПРАВЛЕНИИ РИСКОМ, ИЗГОТОВИТЕЛЬ должен учитывать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
д) Описать СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ и определить, необходимо ли дополнительно учитывать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
Действие терапевта является ЗАДАЧЕЙ для данного СЦЕНАРИЯ ИСПОЛЬЗОВАНИЯ. Если терапевт участвует в УПРАВЛЕНИИ РИСКОМ, то ИЗГОТОВИТЕЛЬ должен знать, способен ли терапевт отреагировать ожидаемым образом, чтобы УПРАВЛЯТЬ РИСКОМ исходя из доступной ему информации. Ответ на этот вопрос требует анализа возможностей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ терапевта (см. примечание, выделенное красным цветом на рисунке ВВ.2, рядом с ГОСТ ISO 14971—2021, 7.3):
- поскольку терапевт в данном примере участвует в УПРАВЛЕНИИ РИСКОМ, в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ ИЗГОТОВИТЕЛЬ должен изучить, имеет ли место надлежащая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ;
- данный пример представляет собой СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ, СВЯЗАННЫЙ С ОПАСНОСТЬЮ. Хотя в ГОСТ Р МЭК 62366-1—2021, 5.5, указано, что, как правило, все СЦЕНАРИИ ИСПОЛЬЗОВАНИЯ, СВЯЗАННЫЕ С ОПАСНОСТЬЮ, должны оцениваться с использованием СУММАТИВНОЙ ОЦЕНКИ, из-за субъективного характера оценки СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ вместо этого следует провести ФОРМАТИВНУЮ ОЦЕНКУ данного СЦЕНАРИЯ ИСПОЛЬЗОВАНИЯ, СВЯЗАННОГО С ОПАСНОСТЬЮ.
е) Определить ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, которые могут возникнуть после потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ, например с использованием ЦОАЗ (для выполнения требований 201.4.2.3.102), как показано в таблице ВВ.З.
Таблица ВВ.З — Пример использования ЦОАЗ в ВВ.5.4
Основная цель | Подцель | Предполагаемое действие ОПЕРАТОРА | Элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ | |
Выявленная ОПАСНАЯ СИТУАЦИЯ | Способы снижения РИСКА | |||
1.0 Снизить РИСКИ, связанные с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, до приемлемого уровня | 1.1 Когда ПАЦИЕНТ находится в ненадлежащем для продолжения РЕАБИЛИТАЦИИ состоянии, он может получить травму | Предотвратить ВРЕД при ненадлежащем состоянии ПАЦИЕНТА | Терапевт останавливает РОБОТА РОКО, при необходимости вызывает скорую помощь, а затем освобождает ПАЦИЕНТА от креплений РОБОТА РОКО | Терапевт Уровень 1 (восприятие): обращает внимание на ненормальный цвет лица, дрожь или невнятную речь ПАЦИЕНТА. Уровень 2 (понимание): понимает, что ПАЦИЕНТ находится в ненадлежащем состоянии. Уровень 3(прогнозирование): ПАЦИЕНТ может потерять сознание, если его кровяное давление падает, или причинить себе ВРЕД, если у него разовьется гипертония |
ж) Внедрить средства УПРАВЛЕНИЯ РИСКОМ (ГОСТ ISO 14971—2021, 7.1).
Ввести достаточное число стандартных операционных процедур (СОП) для проверки состояния ПАЦИЕНТА и настройки параметров РЕАБИЛИТАЦИОННОГО РОБОТА, инструкции для терапевта или программы обучения:
- снизить РИСК, вызванный восприятием; ОПЕРАТОР должен быть обучен проверять состояние ПАЦИЕНТА;
- снизить РИСК, вызванный пониманием; ОПЕРАТОР должен быть обучен определять ненадлежащее состояние ПАЦИЕНТА;
- снизить РИСК, вызванный прогнозированием; ОПЕРАТОР должен быть обучен прогнозировать будущее состояние ПАЦИЕНТА.
и) Выполнить следующие этапы ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА и ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
ВВ.5.5 Процесс проектирования экзоскелета нижних конечностей с использованием костылей для опоры
Примечание — В данном примере показано действие ОПЕРАТОРА после возникновения УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ, чтобы показать, что аспекты СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ целесообразны для снижения РИСКА.
Экзоскелет нижней конечности для РЕАБИЛИТАЦИИ, показанный на рисунке ВВ.4, представляет собой ШАГАЮЩЕГО РОБОТА РОКО, который предназначен для тренировки ПАЦИЕНТА с НАРУШЕНИЕМ посредством определенных процедур, таких как вставание, ходьба или принятие сидячего положения. Костыли являются основной опорной системой ПАЦИЕНТА. ОПЕРАТОРЫ — это ПАЦИЕНТ и обученный терапевт, который наблюдает за выполнением РЕАБИЛИТАЦИИ. Все движения ШАГАЮЩЕГО РОБОТА РОКО инициируются терапевтом с помощью кнопок на РОБОТЕ РОКО или ПАЦИЕНТОМ с помощью пульта дистанционного управления, установленного в костылях.
Л—ПАЦИЕНТ;
— опорная система для ПАЦИЕНТА;
— ПРИВОДНЫЕ РАБОЧИЕ ЧАСТИ;
— система приведения в действие
Рисунок ВВ.4 — ШАГАЮЩИЙ РОБОТ РОКО типа «экзоскелет»
В качестве примера принято распространенное УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ для экзоскелетных РОБОТОВ РОКО — перегрев двигателя. ОПАСНЫЕ СИТУАЦИИ могут возникнуть после того, как РОБОТ РОКО отключит питание двигателя в предохранительных целях, и могут быть выявлены в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА или ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. Например, предупреждающий сигнал, указывающий на неизбежный останов из-за перегрева двигателя, может быть введен в качестве дополнительного средства УПРАВЛЕНИЯ РИСКОМ, требующего от ОПЕРАТОРА безопасного прекращения работы РОБОТА РОКО.
В данном примере в ЦОАЗ рассмотрена только одна подцель (однако в целом может быть более одной подцели). Данный пример демонстрирует, как действие ОПЕРАТОРА после возникновения УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ требует СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ.
Для каждого этапа в данном примере приведены ссылки на наиболее важные подпункты стандартов ГОСТ ISO 14971 и ГОСТ Р МЭК 62366-1, чтобы помочь согласовать данный пример с их процессами и блок-схемой, показанной на рисунке ВВ.2.
а) Определить ОПАСНУЮ СИТУАЦИЮ (ГОСТISO 14971—2021, 5.4, 5.5).
РОБОТ РОКО может резко остановиться из-за перегрева двигателя, а ПАЦИЕНТ может потерять равновесие и упасть, т. е. возникает ОПАСНАЯ СИТУАЦИЯ.
б) Оценить РИСК и определить, необходимо ли его снижение (ГОСТ ISO 14971—2021, 5.5 и пункт 6).
Да. Необходимо снижение РИСКА.
в) Определить средство УПРАВЛЕНИЯ РИСКОМ (ГОСТ ISO 14971—2021, 7.1).
ПАЦИЕНТ нажимает любую клавишу/кнопку, чтобы остановить экзоскелет, использует костыли, чтобы сохранить равновесие в положении стоя, сидя или приседа, а затем зовет на помощь.
Терапевт приносит ПАЦИЕНТУ стул, чтобы он мог отдохнуть, и помогает ПАЦИЕНТУ сохранить равновесие.
г) Описать СЦЕНАРИЙ ИСПОЛЬЗОВАНИЯ и определить, нужно ли дополнительно учитывать СИТУАЦИОННУЮ ОСВЕДОМЛЕННОСТЬ.
Действие ОПЕРАТОРА является ЗАДАЧЕЙ для данного СЦЕНАРИЯ ИСПОЛЬЗОВАНИЯ. Если терапевт участвует в УПРАВЛЕНИИ РИСКОМ, то ИЗГОТОВИТЕЛЬ должен знать, способен ли ОПЕРАТОР отреагировать ожидаемым образом, чтобы УПРАВЛЯТЬ РИСКОМ исходя из доступной ему информации. Ответ на этот вопрос требует анализа возможностей СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ ОПЕРАТОРА (см. примечание, выделенное красным цветом на рисунке ВВ.2, рядом с ГОСТ ISO 14971—2021, 7.3).
Поскольку ОПЕРАТОР в данном примере участвует в УПРАВЛЕНИИ РИСКОМ, в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ ИЗГОТОВИТЕЛЬ должен изучить, имеет ли место надлежащая СИТУАЦИОННАЯ ОСВЕДОМЛЕННОСТЬ.
д) Определить ОПАСНОСТИ или ОПАСНЫЕ СИТУАЦИИ, которые могут возникнуть после потери СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ в приведенном выше СЦЕНАРИИ ИСПОЛЬЗОВАНИЯ, например с использованием ЦОАЗ (для выполнения требований 201.4.2.3.102), как показано в таблице ВВ.4.
Таблица ВВ.4 — Пример использования ЦОАЗ в ВВ.5.5
Основная цель | Подцель | Предполагаемое действие ОПЕРАТОРА | Элементы СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ | |
Выявленная ОПАСНАЯ СИТУАЦИЯ | Способы снижения РИСКА | |||
1.0 Снизить РИСКИ, связанные с СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТЬЮ, до приемлемого уровня | 1.1 Возможное падение ПАЦИЕНТА из-за резкой остановки РОБОТА РОКО после обнаружения перегрева двигателя | Обеспечить устойчивость, когда предупреждающий сигнал указывает на неизбежный останов из-за перегрева двигателя | ПАЦИЕНТ нажимает любую клавишу/кнопку, чтобы остановить РОБОТА РОКО, использует костыли, чтобы сохранить равновесие в положении стоя, сидя или приседа, а затем зовет на помощь Терапевт приносит ПАЦИЕНТУ стул, чтобы он мог отдохнуть, и помогает ПАЦИЕНТУ сохранить равновесие | ОПЕРАТОР (и ПАЦИЕНТ, и терапевт) Уровень 1 (восприятие): должен обратить внимание на предупреждающий сигнал. Уровень 2 (понимание): должен понять, что это означает перегрев двигательной системы. Уровень 3 (прогнозирование): способность предсказать, что, если ОПЕРАТОР не предпримет соответствующих действий, РОБОТ РОКО отключит питание двигателя и резко остановится в ближайшем времени (например, через 30 секунд). Это может привести к падению ПАЦИЕНТА |
е) Реализовать УПРАВЛЕНИЕ РИСКОМ, измерить/указать, спроектировать и внедрить ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС (ГОСТ ISO 14971—2021, 7.1 и ГОСТ Р МЭК 62366-1-2021, 5.6—5.8).
Характеристики ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА:
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой восприятия (см. ГОСТР МЭК 62366-1—2021, рисунок D.1); сигналы или индикация для информирования о скором отключении двигателя, например из-за перегрева, должны быть воспринимаемыми и различимыми для ОПЕРАТОРА в конструкции ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА;
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой познания (понимания) (см. ГОСТ Р МЭК 62366-1—2021, рисунок D.1); ЭКСПЛУАТАЦИОННЫЕ ДОКУМЕНТЫ должны в достаточной степени описывать причины отключения двигателя, чтобы ОПЕРАТОР мог понять ситуацию отключения;
- уменьшить вероятность ОШИБКИ ПРИМЕНЕНИЯ, вызванной ошибкой прогнозирования; ЭКСПЛУАТАЦИОННЫЕ ДОКУМЕНТЫ должны в достаточной степени описывать РОБОТА РОКО, чтобы ОПЕРАТОР мог предсказать будущее развитие событий после отключения двигателя.
Обновить спецификацию пользовательского интерфейса, а затем спроектировать и внедрить пользовательский интерфейс.
ж) Выполнить следующие этапы ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА и ПРОЦЕССА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
Приложение ДА (справочное)
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА.1
Обозначение ссылочного национального, межгосударственного стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ IEC 60601-1-8—2022 | IDT | IEC 60601-1-8:2020 «Изделия медицинские электрические. Часть 1-8. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Общие требования, испытания и руководящие указания по применению систем сигнализации медицинских электрических изделий и медицинских электрических систем» |
ГОСТ ISO 14971—2021 | IDT | ISO 14971:2019 «Изделия медицинские. Применение менеджмента риска к медицинским изделиям» |
ГОСТ Р МЭК 60601-1-2—2014 | IDT | IEC 60601-1-2:2007 «Изделия медицинские электрические. Часть 1-2. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Электромагнитная совместимость. Требования и испытания» |
ГОСТ Р МЭК 60601-1-6—2014 | IDT | IEC 60601-1-6:2010 «Изделия медицинские электрические. Часть 1-6. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Эксплуатационная пригодность» |
ГОСТ Р ИСО 22523—2007 | IDT | ISO 22523:2006 «Протезы конечностей и ортезы наружные. Требования и методы испытания» |
ГОСТ Р МЭК 62366-1—2023 | IDT | IEC 62366-1:2020 «Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности» |
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT — идентичные стандарты. | ||
Библиография | |
[1] МЭК 60601-1-12:2020 (IEC 60601-1-12:2020) | Изделия медицинские электрические. Часть 1-12. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к медицинским электрическим изделиям и системам, используемым для оказания экстренной медицинской помощи (Medical electrical equipment — Part 1-12: General requirements for basic safety and essential performance — Collateral Standard: Requirements for medical electrical equipment and medical electrical systems intended for use in the emergency medical services environment) |
[2] МЭК 60601-1-10:2007 (IEC 60601-1-10:2007) | Изделия медицинские электрические. Часть 1-10. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к разработке контроллеров с физиологической обратной связью (Medical electrical equipment — Part 1-10: General requirements for basic safety and essential performance — Collateral Standard: Requirements for the development of physiologic closed-loop controllers) |
[3] IEC/TR 60601-4-1:2017 | Изделия медицинские электрические. Часть 4-1. Руководство и интерпретация. Медицинские электрические изделия и медицинские электрические системы с некоторой степенью автономности (Medical electrical equipment — Part 4-1: Guidance and interpretation — Medical electrical equipment and medical electrical systems employing a degree of autonomy) |
[4] МЭК 60601-1-11:2015 (IEC 60601-1-11:2015) | Изделия медицинские электрические. Часть 1-11. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к медицинским электрическим изделиям и медицинским электрическим системам, используемым для оказания медицинской помощи вне медицинской организации (Medical electrical equipment — Part 1-11: General requirements for basic safety and essential performance — Collateral Standard: Requirements for medical electrical equipment and medical electrical systems used in the home healthcare environment) |
[5] IEC/TR 62366-2:2016 | Изделия медицинские. Часть 2. Руководство по применению проектирования с учетом эксплуатационной пригодности к медицинским изделиям (Medical devices — Part 2: Guidance on the application of usability engineering to medical devices) |
УДК 615.47:006.354
ОКС 11.040.25
11.040.11
25.040.30
11.180.01
Ключевые слова: роботы, робототехнические устройства, медицинское электрическое изделие, медицинская электрическая система, безопасность, основные функциональные характеристики, медицинские роботы, реабилитация, оценка состояния, компенсация, облегчение
Редактор Е.В. Якубова Технический редактор И.Е. Черепкова Корректор М.И. Першина Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 29.09.2023. Подписано в печать 09.10.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 7,44. Уч.-изд. л. 6,71.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}