ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
60.2.2.3—
2023
(МЭК 80601-2-77:
2019)
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Частные требования безопасности с учетом основных функциональных характеристик хирургического оборудования, использующего средства робототехники
(IEC 80601-2-77:2019, Medical electrical equipment — Part 2-77: Particular requirements for the BASIC SAFETY and essential performance of ROBOTICALLY ASSISTED SURGICAL EQUIPMENT, MOD)
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 858-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту МЭК 80601-2-77:2019 «Изделия медицинские электрические. Часть 2-77. Частные требования безопасности с учетом основных функциональных характеристик к робот-ассистированному хирургическому оборудованию» (IEC 80601-2-77:2019 «Medical electrical equipment— Part 2-77: Particular requirements for the basic safety and essential performance of robotically assisted surgical equipment», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© IEC, 2019 © Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
201.1 Область применения и цель, дополнительные и частные стандарты
201.2 Нормативные ссылки
201.3 Термины и определения
201.4 Общие требования
201.5 Общие требования к испытаниям МЭИ
201.6 Классификация МЭИ и МЭС
201.7 Идентификация, маркировка и документация МЭИ
201.8 Защита от ОПАСНОСТЕЙ поражения электрическим током
201.9 * Защита от МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, создаваемых МЭИ и МЭС
201.10 Защита от ОПАСНОСТЕЙ воздействия нежелательного или чрезмерного излучения
201.11 Защита от чрезмерных температур и других ОПАСНОСТЕЙ
201.12 Точность органов управления и измерительных приборов и защита от опасных значений выходных характеристик
201.13 ОПАСНЫЕ СИТУАЦИИ и условия отказа для МЭИ
201.14 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ (ПЭМС)
201.15 Конструкция МЭИ
201.16 * МЭС
201.17 * ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ МЭИ и МЭС
202 ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ. Требования и испытания
206* ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ
Приложения
Приложение D (справочное) Символы для маркировки
Приложение АА (справочное) Частные указания и обоснования
Приложение ВВ (справочное) Уравнения для расчета общей характеристики остановки системы
и минимальных расстояний
Приложение СС (справочное) Функция останова ХИИСР
Приложение DD (справочное) Альтернативный метод доказательства целостности конструкции в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР
Приложение ЕЕ (справочное) Пример метода испытаний на ПОМЕХОУСТОЙЧИВОСТЬ
к излучениям ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА. . . .36 Приложение ДА (справочное) Сведения о соответствии ссылочных национальных стандартов
международным стандартам, использованным в качестве ссылочных
в примененном международном стандарте...................................39
Библиография........................................................................40
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Безопасность» и распространяется на хирургическое оборудование, использующее средства робототехники. Настоящий стандарт устанавливает частные требования к безопасности хирургического оборудования, использующего средства робототехники, и определяет его основные рабочие характеристики.
Настоящий стандарт является модифицированным по отношению к МЭК 80601-2-77:2019, разработанному техническим подкомитетом 62D «Электромедицинское оборудование» технического комитета МЭК/ТК 62 «Электрооборудование в медицинской практике» и техническим комитетом ИСО/ТК 299 «Робототехника», для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
Настоящий стандарт является частным по отношению к ГОСТ Р МЭК 60601-1—2022, идентичному МЭК 60601-1:2020, который является общим для целого ряда частных стандартов. Настоящий стандарт изменяет и дополняет ГОСТ Р МЭК 60601-1—2022 в части, относящейся к хирургическому оборудованию, использующему средства робототехники.
В настоящем стандарте для сохранения связи с общим стандартом ГОСТ Р МЭК 60601-1—2022 использована разъясненная в 201.1.4 система нумерации и обозначений примененного стандарта.
В настоящий стандарт внесены следующие технические отклонения по отношению к МЭК 80601-2-77:2019:
- настоящий стандарт оформлен с соблюдением правил, установленных в ГОСТ Р 1.5, в соответствии с ГОСТ Р 1.7—2014 (пункт 7.2);
- нормативные ссылки на международные стандарты заменены ссылками на соответствующие национальные стандарты и межгосударственные стандарты, действующие в качестве национальных;
- в разделе 3 определения терминов приведены в соответствии с национальными стандартами;
- в библиографию не включены ссылки на международные стандарты, которым соответствуют национальные стандарты и межгосударственные стандарты, действующие в качестве национальных, приведенные в разделе 2;
- ссылочные международные стандарты, не имеющие соответствующих национальных стандартов и приведенные в примечаниях и справочных приложениях, указаны в библиографии;
- не включен алфавитный список использованных терминов.
В настоящем стандарте приняты следующие шрифтовые выделения:
- требования и определения: прямой шрифт;
- технические требования к испытаниям: курсив;
- информационный материал, приведенный вне таблиц (примечания, примеры и справочная информация): шрифт уменьшенного размера. Нормативный текст таблиц также набран более мелким шрифтом;
- ТЕРМИНЫ, ОПРЕДЕЛЕННЫЕ В ПУНКТЕ 3 ОБЩЕГО СТАНДАРТА И В НАСТОЯЩЕМ СТАНДАРТЕ: ПРОПИСНЫЕ БУКВЫ.
В настоящем частном стандарте для сохранения связи с общим стандартом использованы следующие наименования структурных элементов:
- «пункт» означает один из 19 пронумерованных пунктов в содержании, включающий все подпункты (например, пункт 7 включает подпункты 7.1, 7.2 и т. д.);
- «подпункт» означает пронумерованный подпункт (например, 7.1, 7.2 и 7.2.1 являются подпунктами пункта 7).
В настоящем стандарте обозначения структурных элементов «пункт» и «подпункт» состоят из цифр, разделенных точкой, поэтому ссылки на данные структурные элементы выполнены согласно ГОСТ 1.5—2001 (4.8).
В настоящем стандарте союз «или» использован как включающее «или», т. е. утверждение будет истинным при любой комбинации условий.
Глагольные формы, используемые в настоящем стандарте, совпадают по форме с описанными в пункте 7 Директив ИСО/МЭК (часть 2). В рамках настоящего стандарта вспомогательные глаголы имеют следующие значения:
« должен» или «необходимо» означает, что соблюдение требований или испытаний является обязательным для соответствия настоящему стандарту;
« следует» означает, что соблюдение требований или испытаний рекомендуется, но не является обязательным для соответствия настоящему стандарту;
«может» использовано для описания допустимого способа достижения соответствия требованиям или испытаниям.
Знак звездочки (*) у номера пункта или подпункта указывает, что в приложении АА приведены надлежащие пояснения.
ГОСТ Р 60.2.2.3—2023 (МЭК 80601-2-77:2019)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Частные требования безопасности с учетом основных функциональных характеристик хирургического оборудования, использующего средства робототехники
Robots and robotic devices. Medical electrical equipment.
Particular requirements for the safety and basic performance of surgical equipment using robotic technologies
Дата введения — 2024—01—01
201.1 Область применения и цель, дополнительные и частные стандарты
Применим раздел 1 общего стандарта, за исключением нижеприведенного.
Примечание — Общим стандартом для настоящего стандарта является ГОСТ Р МЭК 60601-1—2022 «Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик», идентичный МЭК 60601-1:2020.
201.1.1 Область применения
Замена
Требования настоящего стандарта применимы к БЕЗОПАСНОСТИ и ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ хирургического оборудования, использующего средства робототехники, а именно: ХИРУРГИЧЕСКИХ ИЗДЕЛИЙ, ИСПОЛЬЗУЮЩИХ СРЕДСТВА РОБОТОТЕХНИКИ (ХИИСР) и ХИРУРГИЧЕСКИХ СИСТЕМ, ИСПОЛЬЗУЮЩИХ СРЕДСТВА РОБОТОТЕХНИКИ (ХСИСР), далее именуемых МЕДИЦИНСКИМИ ЭЛЕКТРИЧЕСКИМИ ИЗДЕЛИЯМИ (МЭИ) и МЕДИЦИНСКИМИ ЭЛЕКТРИЧЕСКИМИ СИСТЕМАМИ (МЭС), вместе с их УСЛОВИЯМИ ВЗАИМОДЕЙСТВИЯ и УСЛОВИЯМИ СОПРЯЖЕНИЯ. Если пункт или подпункт специально предназначен для применения только к МЭИ или только к МЭС, то об этом указано в заголовке и содержании данного пункта или подпункта. В противном случае пункт или подпункт применим как к МЭИ, так и к МЭС.
Если ХИИСР, или ХСИСР, или их ПРИНАДЛЕЖНОСТИ подпадают под действие другого частного стандарта, то такой частный стандарт применяют в дополнение к настоящему стандарту.
Пример — ГОСТ Р МЭК 60601-2-2, относящийся к высокочастотным электрохирургическим аппаратам; ГОСТ Р МЭК 60601-2-18, относящийся к аппаратуре для эндоскопии; ГОСТ Р МЭК 60601-2-22, относящийся к лазерному оборудованию, ГОСТ Р МЭК 60601-2-37, относящийся к ультразвуковому оборудованию, ГОСТ Р МЭК 60601-2-46, относящийся к операционным столам.
201.1.2 Цель
Замена
Целью настоящего частного стандарта является установление частных требований БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ РАБОЧИХ ХАРАКТЕРИСТИК к ХИИСР и ХСИСР.
201.1.3 * Дополнительные стандарты
Дополнение
В настоящем стандарте приведены ссылки на применимые дополнительные стандарты, перечисленные в пункте 2 общего стандарта и пункте 201.2.
Издание официальное
Применяют ГОСТ Р МЭК 60601-1-2—2014 и ГОСТ Р МЭК 60601-1-6—2014 с изменениями, указанными в пунктах 202 и 206, соответственно. ГОСТ Р МЭК 60601-1-3, а также МЭК 60601-1-9 [7] и МЭК 60601-1-11 [2] не применяют.
201.1.4 Частные стандарты
Замена
Стандарты комплекса ГОСТ Р МЭК 60601, частные по отношению к общему стандарту, могут изменять, заменять или отменять требования, содержащиеся в общем стандарте и дополнительных стандартах, имеющих прямое отношение к конкретным МЭИ, а также могут добавлять другие требования БЕЗОПАСНОСТИ с учетом ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК.
Требования, установленные в частном стандарте, имеют приоритет относительно общего стандарта. Для краткости ГОСТ Р МЭК 60601-1 именуется в настоящем стандарте как общий стандарт.
Нумерация пунктов и подпунктов настоящего стандарта соответствует общему стандарту, но имеет префикс «201» (например, пункт 201.1 настоящего стандарта соответствует содержимому пункта 1 общего стандарта), или дополнительному стандарту, но с префиксом «20х», где «х» — последняя(ие) цифра(ы) номера дополнительного стандарта (например, пункт 206.4 настоящего стандарта соответствует содержанию пункта 4 дополнительного стандарта ГОСТ Р МЭК 60601-1-6; пункт 203.4 настоящего стандарта соответствует содержанию пункта 4 дополнительного стандарта ГОСТ Р МЭК 60601-1-3 и т. д.). Изменения, вносимые в текст общего стандарта, обозначены нижеприведенными словами:
- «замена» означает, что пункт или подпункт общего стандарта или применимого дополнительного стандарта полностью заменен текстом настоящего стандарта;
- «дополнение» означает, что текст настоящего стандарта является дополнением к требованиям общего стандарта или применимого дополнительного стандарта;
- «изменение» означает, что пункт или подпункт общего стандарта или применимого дополнительного стандарта изменен в соответствии с текстом настоящего стандарта.
Подпункты, рисунки или таблицы, которые введены дополнительно относительно общего стандарта, пронумерованы начиная с 201.101. Однако из-за того, что определения в общем стандарте пронумерованы с 3.1 по 3.147, дополнительные определения в настоящем стандарте пронумерованы начиная с 201.3.201. Дополнительные приложения обозначены АА, ВВ и т. д., а дополнительные перечисления — аа), bb) и т. д.
Подпункты, рисунки или таблицы, введенные дополнительно относительно дополнительного стандарта, пронумерованы начиная с «20х», где «х» — номер дополнительного стандарта, например, 202 для ГОСТ Р МЭК 60601-1-2, 203 для ГОСТ Р МЭК 60601-1-3 и т. д.
В случае отсутствия пункта или подпункта в настоящем стандарте применяют без изменений соответствующий пункт или подпункт общего стандарта или применимого дополнительно стандарта; если какую-либо часть общего стандарта или применимого дополнительного стандарта не следует применять, то в настоящем стандарте это указано в явном виде.
201.2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты.
Применим пункт 2 общего стандарта, за исключением нижеприведенного.
Замена
ГОСТ Р 60.0.0.4—2023/ИСО 8373:2021 Роботы и робототехнические устройства. Термины и определения
ГОСТ Р МЭК 60601-1-2—2014 Изделия медицинские электрические. Часть 1-2. Общие требования безопасности с учетом основных функциональных характеристик. Параллельный стандарт. Электромагнитная совместимость. Требования и испытания
ГОСТ Р МЭК 60601-1-3 Изделия медицинские электрические. Часть 1-3. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Защита от излучения в диагностических рентгеновских аппаратах
ГОСТ Р МЭК 60601-1-6—2014 Изделия медицинские электрические. Часть 1-6. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Эксплуатационная пригодность
ГОСТ Р МЭК 60601-2-2 Изделия медицинские электрические. Часть 2-2. Частные требования безопасности с учетом основных функциональных характеристик к высокочастотным электрохирургическим аппаратам и высокочастотным электрохирургическим принадлежностям
ГОСТ Р МЭК 60601-2-18—2014 Изделия медицинские электрические. Часть 2-18. Частные требования безопасности с учетом основных функциональных характеристик к эндоскопической аппаратуре
ГОСТ Р МЭК 60601-2-22 Изделия медицинские электрические. Часть 2-22. Частные требования безопасности с учетом основных функциональных характеристик к хирургическому, косметическому, терапевтическому и диагностическому лазерному оборудованию
ГОСТ Р МЭК 60601-2-37 Изделия медицинские электрические. Часть 2-37. Частные требования к безопасности и основным характеристикам ультразвуковой медицинской диагностической и контрольной аппаратуры
ГОСТ Р МЭК 60601-2-46 Изделия медицинские электрические. Часть 2-46. Частные требования безопасности с учетом основных функциональных характеристик к операционным столам
ГОСТ Р МЭК 62366-1—2023 Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности
Дополнение
ГОСТ Р IEC 61010-1—2023 Безопасность электрических контрольно-измерительных приборов и лабораторного оборудования. Часть1. Общие требования.
ГОСТ Р 60.1.2.3/ISO/TS 15066:2016 Роботы и робототехнические устройства. Требования безопасности для роботов, работающих совместно с человеком
ГОСТ Р 60.2.2.1—2016/ISO/13482:2014 Роботы и робототехнические устройства. Требования по безопасности для роботов по персональному уходу
ГОСТ Р ИСО 17664—2012 Стерилизация медицинских изделий. Информация, предоставляемая изготовителем для проведения повторной стерилизации медицинских изделий
ГОСТ Р МЭК 60601-1—2022 Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
201.3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р МЭК 60601-1, а также следующие термины с соответствующими определениями.
Дополнение:
201.3.201
АНАТОМИЧЕСКАЯ ПОЛОСТЬ (BODY ORIFICE): Естественная полость в теле, а также внешняя поверхность глазного яблока или постоянная полость, созданная оперативным путем (стома).
[ГОСТ 31508—2012, пункт 3.8]
201.3.202*______________________________________________________________________________________
ЕМКОСТНЫЙ ВЫСОКОЧАСТОТНЫЙ ТОК (CAPACITIVELY COUPLED HF CURRENT): Неустранимый ТОК ВЫСОКОЙ ЧАСТОТЫ, протекающий вследствие емкостной связи от РАБОЧЕЙ ЧАСТИ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА к другой части ХИИСР или ХСИСР.
[Адаптировано из ГОСТ Р МЭК 60601-2-18—2014, пункт 201.3.201]
201.3.203___________________________________________________________________________________
ЭНДОСКОПИЧЕСКОЕ ИЗДЕЛИЕ (ENDOSCOPIC EQUIPMENT): АКТИВНЫЙ ЭНДОСКОП с ИС-ТОЧНИКОМ/ИСТОЧНИКАМИ ПИТАНИЯ, необходимым(и) для его ИСПОЛЬЗОВАНИЯ ПО НАЗНАЧЕНИЮ.
[ГОСТ Р МЭК 60601-2-18—2014, пункт 201.3.204]
201.3.204___________________________________________________________________________________
ВЫСОКОЧАСТОТНЫЙ, ВЫСОКАЯ ЧАСТОТА; ВЧ (HIGH FREQUENCY; HF): Частота менее чем 5 МГц и, как правило, более 200 кГц.
[ГОСТ Р МЭК 60601-2-2—2022, пункт 201.3.220]
201.3.205
ВЫСОКОЧАСТОТНАЯ ХИРУРГИЧЕСКАЯ ПРИНАДЛЕЖНОСТЬ (HF SURGICAL ACCESSORY): ПРИНАДЛЕЖНОСТЬ, предназначенная для передачи, приложения или мониторинга ВЫСОКОЧАСТОТНОЙ энергии, подаваемой ПАЦИЕНТУ от ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА.
[ГОСТ МЭК 60601-2-2—2022, пункт 201.3.223]
201.3.206___________________________________________________________________________________
ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ (HF SURGICAL EQUIPMENT): МЕДИЦИНСКОЕ ЭЛЕКТРИЧЕСКОЕ ИЗДЕЛИЕ, генерирующее ВЫСОКОЧАСТОТНЫЕ токи, предназначенное для проведения хирургических операций, таких как РЕЗАНИЕ или КОАГУЛЯЦИЯ биологических тканей с помощью ВЫСОКОЧАСТОТНЫХ токов.
[ГОСТ МЭК 60601-2-2—2022, пункт 201.3.224]
2 01.3.207* УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ (INTERACTION CONDITIONS): Условия, которые должны быть выполнены для достижения БЕЗОПАСНОСТИ, когда ХИИСР или ХСИСР применены одновременно с несколькими РОБОТОТЕХНИЧЕСКИМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ или с РАБОЧИМИ ЧАСТЯМИ другого МЭИ, по крайней мере одна РАБОЧАЯ ЧАСТЬ которого использует энергию для обеспечения ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ, например ВЫСОКОЧАСТОТНЫЙ ток, ультразвук или лазер.
201.3.208*
УСЛОВИЯ СОПРЯЖЕНИЯ (INTERFACE CONDITIONS): Условия, которые должны быть выполнены для достижения ОСНОВНОЙ БЕЗОПАСНОСТИ любого ФУНКЦИОНАЛЬНОГО СОЕДИНЕНИЯ между ХИИСР или ХСИСР и другим МЭИ или иным изделием в КОНФИГУРАЦИЮ, образующую ХИРУРГИЧЕСКОЕ ОБОРУДОВАНИЕ, ИСПОЛЬЗУЮЩЕЕ СРЕДСТВА РОБОТОТЕХНИКИ.
[Адаптировано из ГОСТ Р МЭК 60601-2-18—2014, пункт 201.3.211]
201.3.209
ИНВАЗИВНОЕ МЕДИЦИНСКОЕ ИЗДЕЛИЕ (INVASIVE DEVICE): Медицинское изделие, которое полностью или частично вводят в тело через его поверхность или через АНАТОМИЧЕСКИЕ ПОЛОСТИ в теле, а также посредством хирургического вмешательства или в связи с ним.
[ГОСТ 31508—2012, пункт 3.6]
2 01.3.210* МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС (MECHANICAL INTERFACE): Монтажная поверхность на ХИИСР или ХСИСР, предназначенная для установки сменных ПРИНАДЛЕЖНОСТЕЙ, компонентов или деталей, которыми механически манипулирует ХИИСР или ХСИСР.
Примечания
1 МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС может быть использован для установки стерильных элементов.
2 МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС может обеспечивать изоляцию и другие функции (например, стерильную границу) для обеспечения БЕЗОПАСНОСТИ.
3 ХИИСР или ХСИСР может иметь ни одного, один или более МЕХАНИЧЕСКИХ ИНТЕРФЕЙСОВ на каждом РОБОТОТЕХНИЧЕСКОМ ХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ.
2 01.3.211 МОНТИРУЕМАЯ ЧАСТЬ (MOUNTED PART): Любая часть ХИИСР или ХСИСР, включая ПРИНАДЛЕЖНОСТИ, предназначенная для установки на операционном столе или на другой опорной конструкции, которая не является частью ХИИСР или ХСИСР.
2 01.3.212 ЗАЩИТНЫЙ ОСТАНОВ ХИИСР (RASE PROTECTIVE STOP): Вид прерывания работы, позволяющий приостановить движение в качестве меры УПРАВЛЕНИЯ РИСКОМ, поддерживая при этом способность ПРОГРАММИРУЕМЫХ ЭЛЕКТРИЧЕСКИХ МЕДИЦИНСКИХ СИСТЕМ (ПЭМС) обеспечивать возобновление работы ХИИСР или ХСИСР.
Примечания
1 ЗАЩИТНЫЙ ОСТАНОВ ХИИСР может быть инициирован вручную или автоматически с помощью ПЭМС.
2 ЗАЩИТНЫЙ ОСТАНОВ ХИИСР может быть скоординирован с отключением питания РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА и ПРИНАДЛЕЖНОСТЕЙ, если это необходимо в качестве меры УПРАВЛЕНИЯ РИСКОМ.
3 В приложении СС приведены различия между аварийным остановом и ЗАЩИТНЫМ ОСТАНОВОМ ХИИСР.
20 1.3.213* ХИРУРГИЧЕСКОЕ ИЗДЕЛИЕ, ИСПОЛЬЗУЮЩЕЕ СРЕДСТВА РОБОТОТЕХНИКИ; ХИИСР (ROBOTICALLY ASSISTED SURGICAL EQUIPMENT; RASE): МЕДИЦИНСКОЕ ЭЛЕКТРИЧЕСКОЕ ИЗДЕЛИЕ, в состав которого входит механизм, управляемый ПЭМС, предназначенный для реализации позиционирования или манипулирования РОБОТОТЕХНИЧЕСКОГО(ИХ) ХИРУРГИЧЕСКОГО(ИХ) ИНСТРУМЕНТА(ОВ).
Примечания
1 «Позиционирование» включает ПРЕДУСМОТРЕННОЕ НАЗНАЧЕНИЕ размещения, поддержания или удерживания РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА.
2 ХИИСР могут быть хирургическими роботами, хирургическими устройствами, использующими средства робототехники, компьютеризированными хирургическими системами, хирургическими манипуляторами и т. д.
3 В настоящем стандарте РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ рассмотрен как часть ХИИСР или ХСИСР.
2 01.3.214 ХИРУРГИЧЕСКАЯ СИСТЕМА, ИСПОЛЬЗУЮЩАЯ СРЕДСТВА РОБОТОТЕХНИКИ; ХСИСР (ROBOTICALLY ASSISTED SURGICAL EQUIPMENT; RASE): МЕДИЦИНСКАЯ ЭЛЕКТРИЧЕСКАЯ СИСТЕМА, в состав которой входит механизм, управляемый ПЭМС, предназначенный для реализации позиционирования или манипулирования РОБОТОТЕХНИЧЕСКОГО(ИХ) ХИРУРГИЧЕСКОГО(ИХ) ИНСТРУМЕНТА(ОВ).
2 01.3.215* КОНФИГУРАЦИЯ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ (ROBOTIC SURGERY CONFIGURATION): Комбинация ХИИСР или ХСИСР посредством УСЛОВИЙ ВЗАИМОДЕЙСТВИЯ и УСЛОВИЙ СОПРЯЖЕНИЯ с одним или несколькими из следующих объектов:
- ПРИНАДЛЕЖНОСТИ;
- другие ХИИСР или ХСИСР;
- другие МЭИ;
- изделия, не относящиеся к МЭИ;
- МЭС.
2 01.3.216* РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ (ROBOTIC SURGICAL INSTRUMENT): ИНВАЗИВНОЕ МЕДИЦИНСКОЕ ИЗДЕЛИЕ с РАБОЧЕЙ ЧАСТЬЮ, предназначенное для того, чтобы им манипулировали ХИИСР или ХСИСР с целью выполнения задач ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ.
Примечания
1 К задачам ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ относится визуализация.
2 РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ может быть сменным посредством МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА (см. 201.3.210 и приложение АА о подключении РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА к ХИИСР).
3 РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ может быть ПРИНАДЛЕЖНОСТЬЮ ХИИСР или ХСИСР.
2 01.3.217 ХИРУРГИЧЕСКАЯ ОПЕРАЦИЯ (SURGERY): ПРОЦЕДУРА, применяемая к тканям в виде разъединения, удаления, перемещения или соединения, при которой для управления болевыми ощущениями, как правило, необходимо применение местной или общей анестезии либо полного успокоения под воздействием седативных средств.
201.4 Общие требования
Применим пункт 4 общего стандарта, за исключением нижеприведенного.
201.4.1 Условия применения к МЭИ и МЭС
Дополнительный подпункт
201.4.1.101* РОБОТОТЕХНИЧЕСКИЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ и другие МЭИ
Если требования к РОБОТОТЕХНИЧЕСКИМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТАМ и другим МЭИ, установленные в других применимых частных стандартах, противоречат требованиям к УСЛОВИЯМ ВЗАИМОДЕЙСТВИЯ настоящего стандарта, то требования настоящего стандарта должны иметь приоритет.
201.4 .3* ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ
Дополнение
Дополнительные требования к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ установлены в подпунктах, перечисленных в таблице 201.101.
Таблица 201.101 — Перечень требований к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ
Требование | Подпункт |
Обеспечение отсутствия неприемлемого РИСКА при ухудшении информации, необходимой для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 201.13.1.101 Информация, необходимая для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ |
Обеспечение отсутствия неприемлемого РИСКА при ухудшении функциональных характеристик управления движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 201.13.1.102 Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА |
201.4 .6* Части МЭИ или МЭС, находящиеся в контакте с ПАЦИЕНТОМ
Дополнение
Примечание — Дополнительная информация представлена в приложении АА.
201.4 .7 УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ для МЭИ
Дополнение
При применении 4.7 необходимо учесть УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ и УСЛОВИЯ СОПРЯЖЕНИЯ.
201.5 Общие требования к испытаниям МЭИ
Применим пункт 5 общего стандарта, за исключением нижеприведенного.
201.5.4 Прочие условия испытаний
Дополнение к перечислению а)
Перед проведением испытаний ХИИСР должно быть приведено в работоспособное состояние в соответствии с инструкциями ИЗГОТОВИТЕЛЯ.
201.5.7 Предварительное воздействие влагой
Дополнение
Одноразовые защитные пленки оборудования не подлежат предварительному воздействию влаги.
201.6 Классификация МЭИ и МЭС
Применим пункт 6 общего стандарта.
201.7 Идентификация, маркировка и документация МЭИ
Применим пункт 7 общего стандарта, за исключением нижеприведенного.
201.7 .2.2 Идентификация
Дополнительные подпункты
201.7.2 .2.101 Маркировка максимальной массы ПАЦИЕНТА и БЕЗОПАСНОЙ РАБОЧЕЙ НАГРУЗКИ
Если операционный стол является частью ХИИСР, то он должен иметь маркировку с указанием максимальной массы ПАЦИЕНТА и БЕЗОПАСНОЙ РАБОЧЕЙ НАГРУЗКИ (обозначения см. на рисунке 201.101).
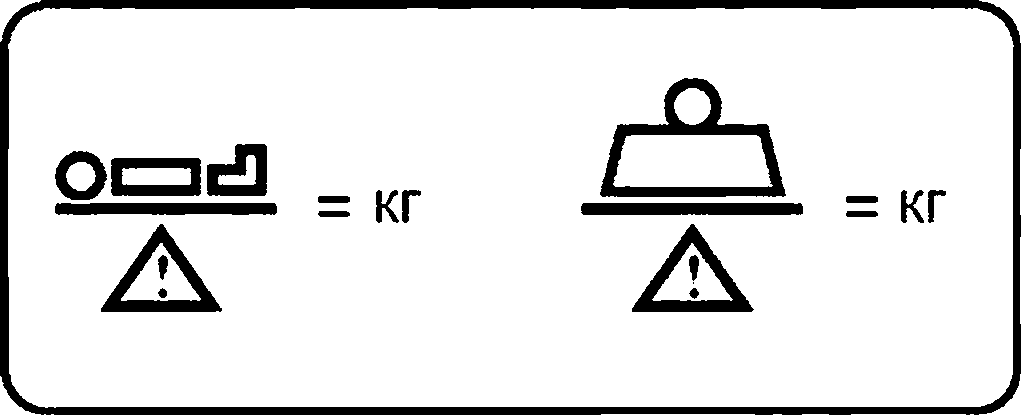
Рисунок 201.101 — Графическое обозначение максимальной массы ПАЦИЕНТА и БЕЗОПАСНОЙ РАБОЧЕЙ НАГРУЗКИ
201.7.2 .2.102 Маркировка массы МОНТИРУЕМОЙ ЧАСТИ
Если ХИИСР имеет одну или несколько МОНТИРУЕМЫХ ЧАСТЕЙ, то на каждую МОНТИРУЕМУЮ ЧАСТЬ должна быть нанесена маркировка с указанием ее максимальной массы, за исключением тех случаев, когда связанная с данной массой ОПАСНОСТЬ не влечет за собой неприемлемый РИСК (например, когда данная масса незначительна) или когда маркировка практически не выполнима (обозначение см. на рисунке 201.102).
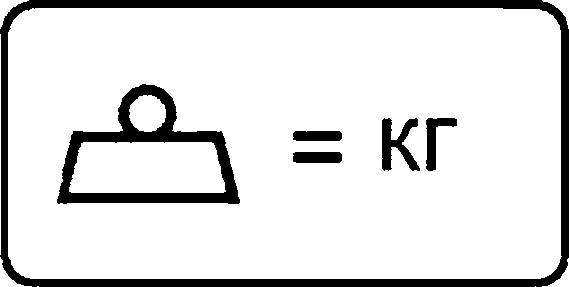
Рисунок 201.102 — Графическое обозначение массы МОНТИРУЕМОЙ ЧАСТИ
Масса МОНТИРУЕМОЙ ЧАСТИ должна включать максимальную массу установленных на ней инструментов и ПРИНАДЛЕЖНОСТЕЙ.
201.7.2.9 * Классификация IP
Дополнение
Если для ХИИСР нужна маркировка степени защиты (класс IP) и если для соответствия классификации необходимо защитное покрытие, например защитная пленка для оборудования, то на защитное покрытие должна быть нанесена маркировка с обозначением степени защиты.
РОБОТОТЕХНИЧЕСКИЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, поставляемые со специальными инструкциями, содержащими подробное описание допустимых методов и параметров повторной обработки, исключены из данного требования. Для идентификации ПРОЦЕДУРЫ повторной обработки в соответствии с настоящим стандартом обозначение не требуется (см. также 7.9.2.12 общего стандарта).
201.7.2.10 РАБОЧИЕ ЧАСТИ
Дополнение
Если маркировка РАБОЧЕЙ ЧАСТИ практически невыполнима и РАБОЧАЯ ЧАСТЬ является одноразовой, то требуемая маркировка должна быть нанесена на индивидуальной упаковке или на оборудовании, стыкуемом с соединителем данной РАБОЧЕЙ ЧАСТИ.
Соответствие проверяют путем осмотра.
Дополнительный подпункт
201.7.2.101 Альтернативная маркировка
Информацию, доступную ОПЕРАТОРУ на устройстве вывода МЭИ (например, на дисплее), считают эквивалентной маркировке на изделии в части требований подпункта 7.2 общего стандарта, если данная маркировка видна в тот момент, когда данная информация необходима.
Соответствие проверяют путем осмотра.
201.7.4.2 Органы управления
Дополнение
Альтернативная маркировка или отсутствие маркировки органов управления (например, многофункциональных кнопок) допустимы, если в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ доказано, что это не приводит к неприемлемому РИСКУ.
Примечание — Вместо маркировки можно использовать внешние признаки, такие как цвет, тактильные ощущения, расположение, форма.
Соответствие проверяют, анализируя ФАЙЛ ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
201.7.8.1 Цвета световых индикаторов
Замена таблицы 2 таблицей 201.102 и ссылок на таблицу 2 ссылками на таблицу 201.102 соответственно.
Таблица 201.102 — Цвета световых индикаторов и их значение для МЭИ
Цвет | Значение |
Красный | Предупреждение. Необходима немедленная реакция ОПЕРАТОРА |
Желтый | Внимание. Необходима надлежащая реакция ОПЕРАТОРА;
|
Синий | Режим коагуляции ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА, если применимо;
|
Зеленый | Готовность к работе |
Другой цвет | Любое значение, кроме тех, которые соответствуют красному, желтому, синему или зеленому цвету |
201.7.9.2 .2 Предупреждения и указания по безопасности
Дополнение
В дополнение к требованиям других частных стандартов, которые могут иметь отношение к данной теме, должны быть предусмотрены нижеприведенные предупреждения и указания по технике безопасности.
Предупреждения относительно УСЛОВИЙ ВЗАИМОДЕЙСТВИЯ:
а) если для КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, необходимы РАБОЧИЕ ЧАСТИ ТИПА CF, то РАБОЧИЕ ЧАСТИ других МЭИ, применяемых в данной КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, должны быть РАБОЧИМИ ЧАСТЯМИ ТИПА CF;
Ь) если для КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, необходимы РАБОЧИЕ ЧАСТИ ТИПА BF, то РАБОЧИЕ ЧАСТИ других МЭИ, применяемых в данной КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, должны быть РАБОЧИМИ ЧАСТЯМИ ТИПА F;
с) при использовании других МЭИ с РОБОТОТЕХНИЧЕСКИМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ТОКИ УТЕЧКИ НА ПАЦИЕНТА могут суммироваться;
d) при использовании ХИИСР или ХСИСР с лазерным оборудованием должны быть даны рекомендации относительно их безопасного использования, включая избегание возможных травм, например: использование подходящих средств индивидуальной защиты или установка надлежащего фильтра для РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ;
е) совместимость ХИИСР или ХСИСР с любыми РОБОТОТЕХНИЧЕСКИМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ и другими РАБОЧИМИ ЧАСТЯМИ, включая другие МЭИ, должна быть проверена перед каждым использованием в соответствии с любыми критериями безопасного применения, определенными в инструкциях по применению;
f) перед каждым использованием следует проверять наружную поверхность частей любых РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ, предназначенных для введения ПАЦИЕНТУ, чтобы убедиться в отсутствии непредусмотренных шероховатых поверхностей, острых краев или кромок, которые могут причинить ВРЕД.
Предупреждения относительно МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА:
д) ПРИНАДЛЕЖНОСТИ, другие МЭИ и/или изделия, не являющиеся МЭИ, не указанные или не разрешенные ИЗГОТОВИТЕЛЕМ, не следует подключать к МЕХАНИЧЕСКИМ ИНТЕРФЕЙСАМ и другим интерфейсам ХИИСР (см. также 16.2 общего стандарта).
Указания по технике безопасности относительно УСЛОВИЙ СОПРЯЖЕНИЯ:
h) рекомендации по предотвращению РИСКОВ, вызванных применением ХИИСР вместе с ПРИНАДЛЕЖНОСТЯМИ, другими МЭИ и/или изделиями, не являющимися МЭИ, в КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ (см. также 15.4.1 и 16.2 общего стандарта).
Соответствие проверяют, анализируя инструкции по применению.
Дополнительный подпункт
201.7.9.2.101 Освобождение ПАЦИЕНТА
Инструкции по применению должны содержать информацию, необходимую ОПЕРАТОРУ для быстрого и безопасного извлечения любых инвазивных частей ХИИСР из тела ПАЦИЕНТА (см. также 201.9.2.5).
201.8 Защита от ОПАСНОСТЕЙ поражения электрическим током
Применим пункт 8 общего стандарта, за исключением нижеприведенного.
201.8.3 Классификация РАБОЧИХ ЧАСТЕЙ
Дополнение
ИЗГОТОВИТЕЛЬ должен учитывать УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ при классификации РАБОЧИХ ЧАСТЕЙ (например, номинальные параметры ВЫСОКОЧАСТОТНОГО РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА).
Примечание — Информация о применении ХИИСР для неэндоскопических задач приведена в 201.11.101.
201.8.5.1.1 Общие положения
Дополнение
Примечание 101 — ПРИНАДЛЕЖНОСТИ, такие как защитные пленки для оборудования, могут служить СРЕДСТВАМИ ЗАЩИТЫ, если возможно определить надлежащие испытания свойств, которые могут включать механическую стойкость, термостойкость, влагостойкость, любую огнестойкость. Испытания электрических свойств определены в 8.7, 8.8 и 8.9 (включая 8.8.2 для тонких материалов, если применимо).
201.8.5.2 Разделение СОЕДИНЕНИЙ С ПАЦИЕНТОМ
Дополнительный подпункт
201.8.5.2.101* Изоляция типа F
Соблюдение требований к разделению РАБОЧИХ ЧАСТЕЙ ТИПА F необходимо поддерживать при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемом неправильном применении (например, столкновение во время ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ).
Соответствие проверяют осмотром МЭИ, а также анализом ФАЙЛА ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ или ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.8.6.3 Защитное заземление движущихся частей
Замена
В отношении любого СОЕДИНЕНИЯ ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ, используемого на подвижной части, ИЗГОТОВИТЕЛЬ должен продемонстрировать, что соединение будет оставаться надежным в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР.
Соответствие проверяют путем осмотра ХИИСР и, при необходимости, анализом ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
Данные СОЕДИНЕНИЯ ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ должны быть испытаны в соответствии с 8.6.4 общего стандарта.
При испытаниях следует учитывать динамическое воздействие движения на СОЕДИНЕНИЯ ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ.
201.8.9.1.1* Общие положения
Дополнение
ПУТИ УТЕЧКИ и ВОЗДУШНЫЕ ЗАЗОРЫ могут быть уменьшены в РОБОТОТЕХНИЧЕСКОМ ХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ, чтобы обеспечить возможность изготовления деталей небольшого размера, если в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА показана надлежащая безопасность, и в этом случае должны быть соблюдены требования 8.5.1.3 общего стандарта для двух СРЕДСТВ ЗАЩИТЫ ОПЕРАТОРА, степень загрязнения 1.
Примечание — См. ГОСТ Р МЭК 60601-2-18—2014, приложение J, с примером активного эндоскопа и ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА, используемых с МЭИ.
201.9 * Защита от МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, создаваемых МЭИ и МЭС
Применим пункт 9 общего стандарта, за исключением нижеприведенного.
201.9. 2.2.4.4* Защитные устройства
Замена в первом абзаце вводного предложения к перечислениям:
Защитные устройства (например, электромеханические, ПЭМС), как меры по УПРАВЛЕНИЮ РИСКОМ, должны быть разработаны и включены в систему управления так, чтобы:
Замена в первом пункте перечислений:
- движущиеся части, которые начинают двигаться, когда они находятся в пределах досягаемости людей, не должны приводить к неприемлемому РИСКУ;
замена во втором пункте перечислений:
- если защитное устройство, такое как мера УПРАВЛЕНИЯ РИСКОМ, не работает в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ, то должно быть предусмотрено второе защитное устройство, например одно или несколько устройств аварийной остановки (см. 9.2.4 общего стандарта), или ЗАЩИТНЫЙ ОСТАНОВ ХИИСР (см. 201.3.212), или ХИИСР, и оно должно быть БЕЗОПАСНЫМ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ (см. 4.7 общего стандарта).
201.9.2.2.5 * Непрерывное воздействие
Замена следующих элементов перечисления:
а) движение происходит в поле зрения одного или нескольких ОПЕРАТОРОВ.
Соответствие проверяют путем осмотра;
Ь) движение ХИИСР или его частей возможно только при непрерывном воздействии на управление со стороны ОПЕРАТОРА, а дополнительный ОПЕРАТОР имеет доступ к прекращению движения до тех пор, пока можно рассчитывать на реакцию ОПЕРАТОРА для деактивации устройства с целью предотвращения нанесения ВРЕДА.
Примечание — Ручное управление движением также считают соответствующим требованиям данного подпункта, если масса устройства и скорость движения позволяют надлежащим образом управлять позиционированием, не вызывая неприемлемый РИСК.
Соответствие проверяют путем осмотра;
с) если система непрерывного воздействия выходит из строя в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ, то должна быть предусмотрена вторая мера УПРАВЛЕНИЯ РИСКОМ, например: одно или несколько устройств аварийного останова (см. 9.2.4 общего стандарта) или ЗАЩИТНЫЙ ОСТАНОВ ХИИСР (см. 201.9.2.101), иначе ХИИСР должно быть БЕЗОПАСНЫМ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ (см. 4.7 общего стандарта).
При необходимости соответствие проверяют проведением:
- осмотра ХИИСР;
- анализа конструкции и схем;
- любых надлежащих испытаний, включая, при необходимости, испытания в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
201.9.2.2.6 * Скорость движения
Дополнение
ИЗГОТОВИТЕЛЬ должен учитывать скорость движения относительно движения всего ХИИСР как внутри, так и снаружи ПАЦИЕНТА. ИЗГОТОВИТЕЛЬ может устанавливать разные ограничения.
Примечания
1 В приложении ВВ приведен пример метода оценки эффективности торможения и минимизации расстояния.
2 ИЗГОТОВИТЕЛЬ может задать систему координат, в которой следует измерять скорость. Например, если ПАЦИЕНТ может двигаться, то ХИИСР может остановиться относительно ПАЦИЕНТА.
2 01.9.2.3.2* Выход за пределы диапазона перемещений
Дополнение перед первым абзацем
Если механический концевой ограничитель не является мерой по УПРАВЛЕНИЮ РИСКОМ, то 9.2.3.2 не применим. В этом случае ИЗГОТОВИТЕЛЬ гарантирует, что другие средства остановки не приводят к неприемлемому РИСКУ в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
201.9.2.4 Устройства аварийной остановки
Дополнение
Примечание 101—См. приложениеСС.
201.9.2.5 * Освобождение ПАЦИЕНТА от креплений
Замена первых двух предложений первого абзаца
Необходимо предусмотреть средства для быстрого и безопасного освобождения ПАЦИЕНТА от креплений в случае:
- выхода из строя ХИИСР;
- отказа источника питания (см. 11.8 общего стандарта);
- активации меры УПРАВЛЕНИЯ РИСКОМ;
- аварийной остановки;
- принятия решения ОПЕРАТОРОМ.
Особое внимание должно быть обращено на нижеприведенное.
Дополнение к списку первого абзаца:
- освобождение ПАЦИЕНТА должно обеспечивать извлечение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ХИИСР из тела ПАЦИЕНТА, при необходимости.
Дополнительный подпункт
201.9.2.101* Функции ЗАЩИТНОГО ОСТАНОВА ХИИСР
Когда признано необходимым наличие одной или более функций ЗАЩИТНОГО ОСТАНОВА ХИИСР, эти функции должны соответствовать всем следующим требованиям:
- ЗАЩИТНЫЙ ОСТАНОВ ХИИСР должен снизить РИСК до приемлемого уровня;
- возобновление работы ХИИСР должно быть инициировано ОПЕРАТОРОМ вручную, за исключением тех случаев, когда автоматическое возобновление работы посредством ПЭМС не приводит к неприемлемому РИСКУ;
- ЗАЩИТНЫЙ ОСТАНОВ ХИИСР должен соответствовать пункту 14 (ПЭМС), если применимо.
Примечание — ЗАЩИТНЫЙ ОСТАНОВ ХИИСР может сохранить подачу питания, чтобы снизить РИСК до приемлемого уровня.
Соответствие проверяют путем осмотра ХИИСР, ФАЙЛА МЕНЕДЖМЕНТА РИСКА и проведением функциональных испытаний.
201.9.3 МЕХАНИЧЕСКИЕ ОПАСНОСТИ, связанные с поверхностями, углами и кромками
Дополнение после второго абзаца
Необходимо учитывать повреждения ПРИНАДЛЕЖНОСТЕЙ, например кабелей, аспирационных трубок или защитных пленок для оборудования.
201.9.4.2.4.3 * Перемещение через препятствие
Дополнение
Для ХИИСР, содержащего ПЕРЕДВИЖНОЕ ЭНДОСКОПИЧЕСКОЕ ИЗДЕЛИЕ, может быть применен общий стандарт вместо ГОСТ Р МЭК 60601-2-18.
201.9.8.1* Общие положения
Замена первой позиции в перечислении:
- конструкция опор, систем приостановки или активации должна быть разработана с использованием данных таблицы 21 общего стандарта и значения ПОЛНОЙ НАГРУЗКИ, если альтернативный метод не демонстрирует структурную целостность в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР.
Примечание — Пример альтернативного метода приведен в приложении DD.
Дополнительный пункт
201.9.101 Столкновение ХИИСР с человеком
Если РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ находится внутри или вблизи тела ПАЦИЕНТА, необходимо в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА учесть РИСК, связанный со столкновением ХИИСР с человеком.
Примечания
1 Данная ОПАСНАЯ СИТУАЦИЯ может привести, например, к следующим событиям, но не ограничиваясь перечисленным:
- дисбаланс, превышающий расчетный предел, указанный в 9.4.2;
- деформация конструкции, которая может ухудшить управление движением ХИИСР;
- непредусмотренное движение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА.
2 Под человеком в данном случае понимается ОПЕРАТОР, ПАЦИЕНТ и другие лица, находящиеся рядом с ХИИСР в процессе НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
2 01.9.102 Столкновение ХИИСР с собственной конструкцией и другими объектами
РИСК, связанный со столкновением ХИИСР с собственной конструкцией или с другими объектами при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемом неправильном применении, необходимо рассматривать как часть ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА. Прогнозируемые столкновения не должны приводить к снижению БЕЗОПАСНОСТИ или ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК.
Примечание — Данная ОПАСНАЯ СИТУАЦИЯ может привести, например, к следующим событиям, но не ограничиваясь перечисленным:
- повреждение оборудования;
- утрата калибровки;
- неспособность восстановиться после столкновения;
- непредусмотренное или неконтролируемое движение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА и, при необходимости, функционального испытания.
201.10 Защита от ОПАСНОСТЕЙ воздействия нежелательного
или чрезмерного излученияПрименяют пункт 10 общего стандарта.
201.11 Защита от чрезмерных температур и других ОПАСНОСТЕЙ
Применяют пункт 11 общего стандарта, за исключением нижеприведенного.
201.11.1.1 Максимальная температура при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ
Дополнение
Испытания проводят в наихудших условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ в соответствии с проектной спецификацией ИЗГОТОВИТЕЛЯ. В надлежащих случаях испытания проводят с защитными чехлами, такими как защитные пленки для оборудования, надетыми на ХИИСР.
Примечание — Проектная спецификация конструкции может включать, помимо прочего, накрытие ХИИСР защитными чехлами на заданную максимальную продолжительность хирургической ПРОЦЕДУРЫ, от ПРЕДОПЕРАЦИОННОГО до ПОСЛЕОПЕРАЦИОННОГО периода, а также работу при самой высокой температуре окружающей среды, указанной ИЗГОТОВИТЕЛЕМ.
201.11.6.1* Общие положения
Дополнение после первого абзаца
Применимые испытания на проверку защиты, связанной с жидкостями (перелив, расплескивание, утечка, проникание воды), выполняют при наихудших условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Если применимо, то испытания на проверку защиты, связанной с жидкостями, проводят с надетыми на ХИИСР защитными чехлами, например с защитной пленкой для оборудования, или без них. Методы испытаний могут быть одинаковыми или разными в зависимости от сценариев использования. В частности, могут быть уместными разные методы испытаний на расплескивание или проникание воды, включая использование защитных чехлов.
Примечание — Могут существовать периоды времени, когда защитные чехлы отсутствуют; тем не менее расплескивание может иметь место, например во время предоперационной или послеоперационной деятельности.
201.11.6.7 Стерилизация МЭИ и МЭС
Дополнение
Анализ ФАЙЛА МЕНЕДЖМЕНТА РИСКА должен предусматривать рассмотрение соответствия ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ, если применимо.
Примечания
1 ХИИСР может иметь конструкции и функции, которые невозможно проверить только посредством визуального осмотра.
2 Можно рассмотреть другие стандарты по стерилизации медицинских изделий (например, ГОСТ Р ИСО 17664).
Дополнительные подпункты
2 01.11.101 УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ
201.11.101.1 Общие положения
Нижеприведенные требования данного подпункта не применяют к КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, с ЭНДОСКОПИЧЕСКИМ ИЗДЕЛИЕМ.
Примечание — Для КОНФИГУРАЦИИ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, с ЭНДОСКОПИЧЕСКИМ ИЗДЕЛИЕМ применяют ГОСТ Р МЭК 60601-2-18—2014 (201.11.101).
201.11.101.2 Термические и другие ОПАСНОСТИ, создаваемые УСЛОВИЯМИ ВЗАИМОДЕЙСТВИЯ с лазерами
В ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА ИЗГОТОВИТЕЛЬ должен учитывать возможность термических и других РИСКОВ для ПАЦИЕНТА или ОПЕРАТОРА в результате использования лазерного оборудования с ХИИСР, включая:
а) тепловое повреждение (в том числе воспламенение) ХИИСР от отраженной энергии лазерного излучения;
Ь) потенциальное повреждение органов зрения от отраженной энергии лазерного излучения.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.11.101.3 * Термические и другие ОПАСНОСТИ, создаваемые УСЛОВИЯМИ ВЗАИМОДЕЙСТВИЯ с ВЫСОКОЧАСТОТНЫМ ЭЛЕКТРОХИРУРГИЧЕСКИМ АППАРАТОМ
В ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА ИЗГОТОВИТЕЛЬ должен учитывать возможность термических и других РИСКОВ для ПАЦИЕНТА или ОПЕРАТОРА в результате использования ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА с ХИИСР, включая:
а) тепловое повреждение ХИИСР, вызванное электрическим разрядом или ЕМКОСТНЫМ ВЫСОКОЧАСТОТНЫМ ТОКОМ;
Ь) изоляцию доступных для контакта токопроводящих частей от теплового воздействия ЕМКОСТНОГО ВЫСОКОЧАСТОТНОГО ТОКА.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.12 Точность органов управления и измерительных приборов и защита от опасных значений выходных характеристик
Применяют пункт 12 общего стандарта.
201.13 ОПАСНЫЕ СИТУАЦИИ и условия отказа для МЭИ
Применяют пункт 13 общего стандарта, за исключением нижеприведенного.
201.13.1.4 Особые МЕХАНИЧЕСКИЕ ОПАСНОСТИ
Дополнительные подпункты
201.13.1.4.101 Дополнительные МЕХАНИЧЕСКИЕ ОПАСНОСТИ
ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА должен включать анализ УСЛОВИЙ ЕДИНИЧНОГО НАРУШЕНИЯ в отношении потенциальных МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ для ПАЦИЕНТА и СРЕДЫ ПАЦИЕНТА, включая:
- столкновение ХИИСР с человеком (см. 201.9.101);
- столкновение ХИИСР с собственной конструкцией и другими объектами (см. 201.9.102).
201.13.1.101 * Информация, необходимая для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ
Возможность ухудшения информации, необходимой для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ, должна быть рассмотрена в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.13.1.102 * Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА
В ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА необходимо рассмотреть возможность ухудшения характеристик управления движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.14 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ
Применяют пункт 14 общего стандарта.
201.15 Конструкция МЭИ
Применим пункт 15 общего стандарта, за исключением нижеприведенного.
201.15.3.1 Общие положения
Дополнение
Подпункты с 15.3.1 по 15.3.7 (включительно) общего стандарта не применимы к РОБОТОТЕХНИЧЕСКИМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТАМ. РИСК, связанный с механической прочностью РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ, необходимо рассматривать в рамках ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.15.4 Компоненты МЭИ и общая сборка
Дополнительный подпункт
201.15.4.101 Фиксация, предотвращение неправильной настройки МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА
а) МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС должен быть закреплен таким образом, чтобы он не был случайно снят или отсоединен в процессе НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ.
Ь) Неправильное подключение МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА должно быть исключено, если оно может привести к неприемлемому РИСКУ.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
201.16* МЭС
Применяют пункт 16 общего стандарта.
201.17* ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ МЭИ и МЭС
Применяют пункт 17 общего стандарта, за исключением нижеприведенного.
Дополнение
Для испытаний на ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ требования УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ общего стандарта не применяют.
202 ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ. Требования и испытания
Применим ГОСТ Р МЭК 60601-1-2, за исключением следующего.
202.8.1 Общие положения
Дополнение
Если применимо, то альтернативный вариант испытания на ПОМЕХОУСТОЙЧИВОСТЬ может быть организован следующим образом:
- во время испытаний на ПОМЕХОУСТОЙЧИВОСТЬ может быть использована одна репрезентативная конфигурация работы ХИИСР в наиболее неблагоприятных условиях.
Примечание — Выбранная комбинация ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК может быть испытана одновременно при возможности.
202.8.101 Критерии завершенного/незавершенного прохождения испытания на ПОМЕХОУСТОЙЧИВОСТЬ
При рассмотрении БЕЗОПАСНОСТИ необходимо поддерживать СРЕДСТВА УПРАВЛЕНИЯ РИСКОМ, касающиеся освобождения ПАЦИЕНТА от креплений.
202.8.102 ПОМЕХОУСТОЙЧИВОСТЬ к ИЗЛУЧЕНИЯМ ВЫСОКОЧАСТОТНЫХ ЭЛЕКТРОХИРУРГИЧЕСКИХ АППАРАТОВ
ХИИСР, предназначенное для использования в пределах 2 м от активного ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА или для подключения к ПАЦИЕНТУ, проходящему лечение с помощью ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА, необходимо оценить на ПОМЕХОУСТОЙЧИВОСТЬ к ИЗЛУЧЕНИЮ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА и провести испытание в надлежащих случаях.
Примечание — Методы испытаний могут различаться в зависимости от конкретной конфигурации ХИИСР. Пример метода испытаний представлен в приложении ЕЕ.
Соответствие проверяют путем проведения анализа ФАЙЛА МЕНЕДЖМЕНТА РИСКА.
206* ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ
Применяют ГОСТ Р МЭК 60601-1-6, за исключением нижеприведенного.
206.4.2 ПРОЦЕСС ПРОЕКТИРОВАНИЯ с учетом ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ для МЭИ
В первом абзаце применяют ссылку на ГОСТ Р МЭК 62366-1.
Во втором абзаце применяют ссылку на ГОСТ Р МЭК 62366-1.
206.5 Изменение требований
Замена
Примечание — В ГОСТ Р МЭК 62366-1—2023 отсутствует раздел 6, поэтому содержимое раздела 5 в ГОСТ Р МЭК 60601-1-6—2014, в котором определены изменения в разделе 6 ГОСТ Р МЭК 62366—2013, заменено данным примечанием.
Приложения
Применимы приложения общего стандарта, за исключением нижеприведенного.
Приложение D (справочное)
Символы для маркировки
Применяют приложение D общего стандарта, за исключением нижеприведенного.
Дополнение
Дополнительные символы для маркировки ХИИСР представлены в таблице 201.D.101.
Таблица 201 .D.101 — Символы для маркировки ХИИСР или его частей
Символ | Ссылка | Наименование | ||||
101 | ?t~1J = кг = кг А А | См. [3] (рисунок 201.105) | Максимальная масса ПАЦИЕНТА и БЕЗОПАСНАЯ РАБОЧАЯ НАГРУЗКА | |||
102 | = кг | — | Масса МОНТИРУЕМОЙ ЧАСТИ | |||
Приложение АА (справочное)
Частные указания и обоснования
АА.1 Общие положения
Настоящий стандарт относится к БЕЗОПАСНОСТИ и ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ ХИИСР. ХИИСР — это развивающееся направление с широким спектром областей применения, которые были исследованы. Несмотря на то что ХИИСР имеют широкий диапазон конфигураций с различными ПРЕДУСМОТРЕННЫМИ ПРИМЕНЕНИЯМИ, механическими конструкциями и средствами управления, МЭИ наделены определенными общими аспектами, в том числе:
- в ХИИСР использованы технологии робототехники для точного позиционирования РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ и манипулирования ими;
- ХИИСР обычно не использют как таковое при проведении ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ. Его можно интегрировать с другими МЭИ, например: с ЭНДОСКОПИЧЕСКИМ ИЗДЕЛИЕМ, ВЫСОКОЧАСТОТНЫМИ ЭЛЕКТРОХИРУРГИЧЕСКИМИ АППАРАТАМИ и ПРИНАДЛЕЖНОСТЯМИ. Кроме того, к ПАЦИЕНТУ могут быть подключены другие МЭИ.
Требования настоящего стандарта основаны на изложенном выше понимании, что КОНФИГУРАЦИЯ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ и УСЛОВИЯ СОПРЯЖЕНИЯ введены для обеспечения безопасности при таких комбинациях вариантов использования.
ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ и БЕЗОПАСНОСТЬ ХИИСР во многом зависят от характеристик и безопасности РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ, установленных другими частными стандартами серии ГОСТ Р МЭК 60601. Таким образом, настоящий стандарт в основном сфокусирован на безопасности робототехнической части — он не охватывает непосредственно ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ и БЕЗОПАСНОСТЬ РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ, рассмотренные в других специальных частных стандартах, но дополняет другие частные стандарты, например ГОСТ Р МЭК 60601-2-2 и ГОСТ Р МЭК 60601-2-18. Следовательно, настоящий стандарт можно использовать в сочетании с другими частными стандартами в надлежащих случаях.
АА.2 Обоснование отдельных пунктов и подпунктов
Ниже приведены обоснования для конкретных пунктов и подпунктов в настоящем стандарте с номерами пунктов и подпунктов, которые соответствуют номерам в основной части стандарта.
Подпункт 201.1.3 Дополнительные стандарты
Поскольку воздействие ХИИСР или ХСИСР на окружающую среду в достаточной степени охватывается местным законодательством и не имеет прямого отношения к области ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК и БЕЗОПАСНОСТИ ХИИСР или ХСИСР, принято решение не применять [1] и рассматривать этот вопрос отдельно от настоящего стандарта.
Определение 201.3.202 «ЕМКОСТНЫЙ ВЫСОКОЧАСТОТНЫЙ ТОК»
Конструкция ХИИСР, например близкое расположение составных частей, может привести к емкостной электрической связи с РАБОЧЕЙ ЧАСТЬЮ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА, с которым он используется. Часть этого ТОКА ВЫСОКОЙ ЧАСТОТЫ будет передаваться от ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА к частям ХИИСР или ХСИСР и может протекать от оборудования через ПАЦИЕНТА и/или ОПЕРАТОРА назад к ВЫСОКОЧАСТОТНОМУ ЭЛЕКТРОХИРУРГИЧЕСКОМУ АППАРАТУ.
Определение 201.3.207 «УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ»
Новый термин «УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ» основан на термине «УСЛОВИЯ ОБЪЕДИНЕНИЯ В СИСТЕМУ», определенного в ГОСТ Р МЭК 60601-2-18, и включает неэндоскопические типы применения.
Возможны ОПАСНОСТИ при взаимодействии между РОБОТОТЕХНИЧЕСКИМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ или между РОБОТОТЕХНИЧЕСКИМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ и РАБОЧЕЙ ЧАСТЬЮ другого МЭИ. В ГОСТ Р МЭК 60601-2-18 соответствующие ОПАСНОСТИ связаны с УСЛОВИЯМИ ОБЪЕДИНЕНИЯ В СИСТЕМУ, которые основаны на термине «АКТИВНЫЙ ЭНДОТЕРАПЕВТИЧЕСКИЙ ПРИБОР» для описания источника энергии ОПАСНОСТЕЙ. Энергетический термин «АКТИВНЫЙ ЭНДОТЕРАПЕВТИЧЕСКИЙ ПРИБОР» включен в определение УСЛОВИЙ ВЗАИМОДЕЙСТВИЯ.
Определение 201.3.208 «УСЛОВИЯ СОПРЯЖЕНИЯ»
Определение «УСЛОВИЯ СОПРЯЖЕНИЯ» заимствовано из ГОСТ Р МЭК 60601-2-18, чтобы разрешить применение ХИИСР или ХСИСР и другого МЭИ или ИЗДЕЛИЯ, НЕ ЯВЛЯЮЩЕГОСЯ МЭИ, в КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ с ФУНКЦИОНАЛЬНЫМ СОЕДИНЕНИЕМ.
Аналогично, когда ХИИСР или ХСИСР и ЭНДОСКОПИЧЕСКОЕ ИЗДЕЛИЕ имеют ФУНКЦИОНАЛЬНОЕ СОЕДИНЕНИЕ, они имеют общие УСЛОВИЯ СОПРЯЖЕНИЯ. В приложении АА.2 (определение 201.3.215) приведено описание определения КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ.
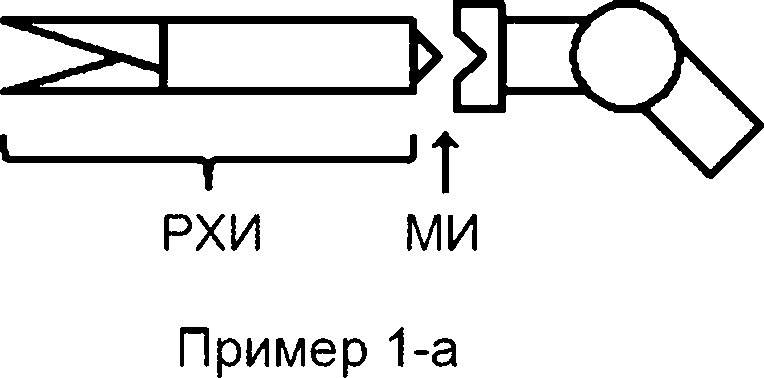
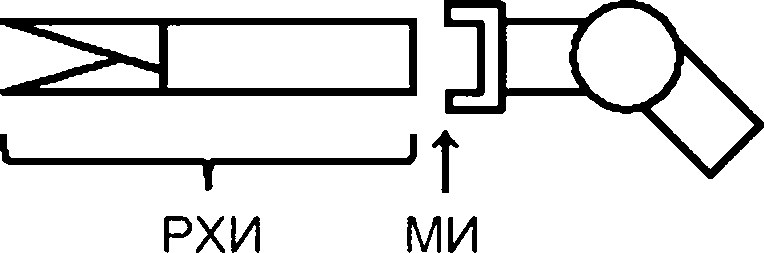
Определение 201.3.210 «МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС»
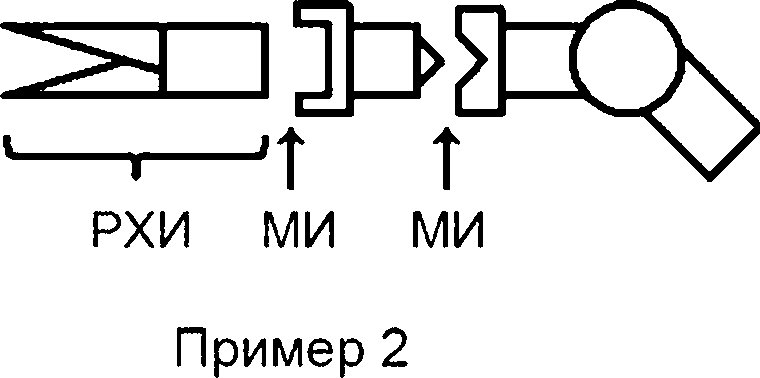
МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС определен в ГОСТ Р 60.0.0.4 как монтажная поверхность на конце манипулятора, к которой крепят рабочий орган. В случае ХИИСР подключение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА к ХИИСР посредством МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА можно обобщить, как показано на рисунке 201.АА. 101. МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС также может обеспечить стерильную границу между РОБОТОТЕХНИЧЕСКИМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ и остальной частью ХИИСР. Например, на рисунке 201.АА.101 (пример 2) МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС (МИ) между РОБОТОТЕХНИЧЕСКИМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ (РХИ) и/или МЕХАНИЧЕСКИМ ИНТЕРФЕЙСОМ на ХИИСР может быть частью стерильной границы.
РХИ
Пример 0
Пример 1-Ь
Рисунок 201.АА. 101 —Примеры присоединения к механическому интерфейсу
Примером РХИ без МИ (рисунок 201.АА. 101, пример 0) может служить небольшой ХИИСР без съемной границы между РХИ и остальной частью ХИИСР.
Во многих ХИИСР используют конструкцию с одним МИ:
- РХИ со специально разработанным МИ, например, пинцет ХИИСР (рисунок 201.АА. 101, пример 1-а);
- РХИ без специально разработанного МИ на стороне РХИ (рисунок 201.АА.101, пример 1-Ь), примером может служить бор в ХИИСР для сверления костей или катетер в ХИИСР для установки катетеров.
Примером РХИ, с двумя или более МИ является использование ручного оборудования в качестве РХИ, например эндоскопа. Эндоскоп крепится к держателю эндоскопа, который является первым МИ. Держатель эндоскопа отделяется от остальной части ХИИСР с помощью другого МИ (рисунок 201.АА. 101, пример 2).
Определение 201.3.213 «ХИРУРГИЧЕСКОЕ ИЗДЕЛИЕ, ИСПОЛЬЗУЮЩЕЕ СРЕДСТВА РОБОТОТЕХНИКИ; ХИИСР»
Существует широкий спектр МЭИ с использованием средств робототехники для оказания помощи в проведении ХИРУРГИЧЕСКИХ ОПЕРАЦИЙ, представленный в ГОСТ Р 60.2.2.1. Их часто называют хирургическими роботами, робототехническими хирургическими устройствами или робот-ассистированными хирургическими устройствами и т. д. Поскольку их спектр довольно обширен с точки зрения разнообразия их конфигураций и ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ, в настоящем стандарте проиллюстрированы общие характеристики, типичные для МЭИ данного типа.
Первоначально наименование настоящего стандарта звучало как «Медицинские роботы для ХИРУРГИЧЕСКИХ ОПЕРАЦИЙ», но в общем случае слово «робот» на доступном языке использовано довольно расплывчато, и общепринятого определения не существует. В ГОСТ Р 60.0.0.4—2023 (3.1) робот определен как «исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования». Совместная рабочая группа 35 пришла к выводу, что целесообразнее определить этот тип МЭИ по-другому, не используя термин «робот».
Определение 201.3.215 «КОНФИГУРАЦИЯ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ»
Данный термин предполагает наличие в составе конфигурации других МЭИ и МЭС. На рисунках 201.АА.102 и 201.АА.103 показаны два примера КОНФИГУРАЦИИ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ. Данные рисунки являются примерами и не предназначены для отображения какой-либо конкретной конфигурации, необходимой для соответствия настоящему стандарту.
КОНФИГУРАЦИЯ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ
(область применения ГОСТ Р 60.2.2.3-2023)
Ц- ХИИРС на стороне ОПЕРАТОРА;

- ХИИРС на стороне ПАЦИЕНТА;
ш
Д- зажим для тканей; ^J-ВЧ пинцет;
- активный эндоскоп;
- головка камеры;
Os V 8х
Ио.
- блок обработки видеоинформации;
- источник освещения;
Н- ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ;
|10|— цифровой регистратор изображения;
11 -другой ПК, сеть
УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ;
УСЛОВИЯ СОПРЯЖЕНИЯ;
МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС;
-ХИИРС;
Д - ЭНДОСКОПИЧЕСКОЕ ИЗДЕЛИЕ;
- изделия, не являющиеся МЭ ИЗДЕЛИЯМИ
- ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ/ПРИНАДЛЕЖНОСТЬ;
Рисунок 201.АА. 102 — Пример КОНФИГУРАЦИИ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ для лапароскопии
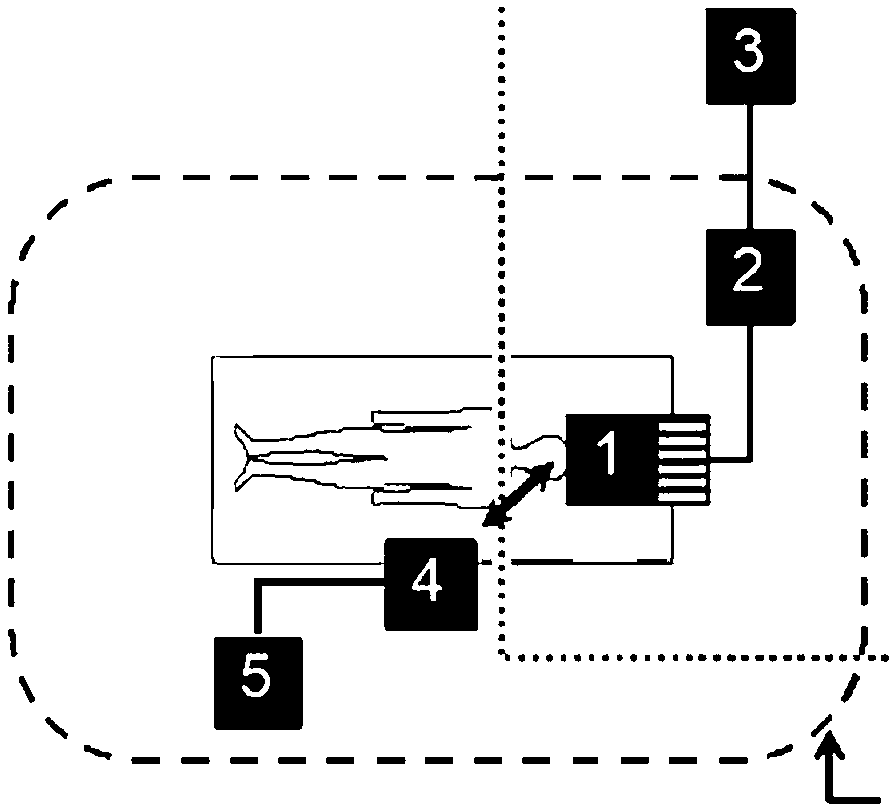
УСЛОВИЯ ВЗАИМОДЕЙСТВИЯ;
УСЛОВИЯ СОПРЯЖЕНИЯ;
МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС;
D- РОБОТИЗИРОВАННЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ (БОР);
-ХИИРС;
- датчик отслеживания положения ХИИРС;
- ВЧ пинцет;
- ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ
<--КОНФИГУРАЦИЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ
(область применения ГОСТ Р 60.2.2.3-2023)
СРЕДА ПАЦИЕНТА
Д-ХИИРС;
- ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ/ПРИНАДЛЕЖНОСТЬ
Рисунок 201.АА. 103 — Пример КОНФИГУРАЦИИ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, для сверления костей
Примечание — На рисунках 201.АА. 102 и 201.АА. 103 операционный стол как часть КОНФИГУРАЦИИ ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, не показан, однако это зависит от ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ.
Определение 201.3.216 «РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ»
Сочтено нецелесообразным определять РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ путем явного перечисления ПРЕДУСМОТРЕННЫХ НАЗНАЧЕНИЙ, действий или наименований инструментов, подпадающих под это определение. На основе анализа [7], отмечено, что:
- толкование терминов «инвазивный» и «хирургический» квалифицированным врачом (хирургом общей практики, ортопедом и т. д.) зависит от дисциплины и различается в зависимости от медицинской практики, даже если фактические ЗАДАЧИ одинаковые;
- хирургические устройства и оборудование, используемые в областях применения ХИИСР и управляемые соответствующими устройствами, бывают инвазивными или неинвазивными.
Таким образом, определение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, установленное в настоящем стандарте, ограничивает область его применения ИНВАЗИВНЫМИ УСТРОЙСТВАМИ. Включение НЕИНВАЗИВНЫХ УСТРОЙСТВ и оборудования (т. е. удаление термина «ИНВАЗИВНОЕ УСТРОЙСТВО» из определения) сделает определение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА излишне и неприемлемо широким.
Следующие примеры не согласуются с определением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА и поэтому не подпадают под действие настоящего стандарта:
- высокоинтенсивное ультразвуковое оборудование для удаления опухолей, управляемое робототехнической рукой-манипулятором;
- позиционирование, выполняемое робототехнической рукой-манипулятором без РАБОЧЕЙ ЧАСТИ.
Такие МЭИ имеют неинвазивное оборудование и устройство: первое с РАБОЧЕЙ ЧАСТЬЮ, второе без нее (при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ). Однако настоящий стандарт может быть полезным руководством для подобных МЭИ.
РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ примерно соответствует РАБОЧЕМУ ОРГАНУ в терминологии робототехники. Однако в случае ХИИСР определение термина «рабочий орган», установленное в ГОСТР 60.0.0.4, не согласуется в строгом смысле с тем, что определение термина «рабочий орган» предполагает наличие «присоединения» к МЕХАНИЧЕСКОМУ ИНТЕРФЕЙСУ, в то время как РОБОТОТЕХНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ХИИСР может не иметь ни МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА, ни возможности быть присоединенным.
Подпункт 201.4.1.101 РОБОТОТЕХНИЧЕСКИЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ и другие МЭИ
Аналогичный подпункт может быть включен в другие частные стандарты, например в ГОСТ Р МЭК 60601-2-18—2014 (201.4.1.101). В случае возникновения противоречия между положениями настоящего стандарта и другими применимыми частными стандартами настоящий стандарт имеет преимущественную силу, если МЭИ является ХИИСР (см. 201.11.101.1 по поводу КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ с ЭНДОСКОПИЧЕСКИМ ИЗДЕЛИЕМ).
Подраздел 201.4.3 ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ
После тщательного рассмотрения пунктов настоящего стандарта выделены следующие составляющие ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК как общие для многих ХИИСР. Данные составляющие показаны на рисунке 201.АА.104.
Информация, необходимая для выполнения операции Рисунок 201.АА.104 — 22 | ХИИРС ПАЦИЕНТ ЗИРОВАННОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА Типичные составляющие ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК ХИИСР |

Информацией, необходимой для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ, могут быть любые данные, предоставленные ХИИСР или другим оборудованием ХИИСР, использованные для принятия клинических решений или влияния на клинические действия или результаты. Информация, необходимая для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ, может включать следующее:
- визуальные данные, например видео или другие данные на основе изображений;
- вычислительные данные, например виртуальная граница, установленная ХИИСР, информация об отслеживании положения инструментов;
- тактильная информация, например тактильная обратная связь от ХИИСР.
В некоторых ХИИСР использована технология визуализации для облегчения перемещения и позиционирования РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ, которая может быть реализована в форме просмотра ОПЕРАТОРОМ изображений в режиме реального времени или предоперационных изображений для руководства позиционированием РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ. Также технология визуализации может включать алгоритмы распознавания изображений и дополненную реальность для предоставления ОПЕРАТОРУ дополнительной информации. Другие ХИИСР используют информацию об отслеживании положения. Последствия ухудшения качества информации, необходимой для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ, следует учитывать при формулировании требований, имеющих значение для каждого типа ХИИСР. Примеры такого ухудшения качества информации приведены в комментариях к 201.13.1.101.
Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА
Управление движением рассматривают как пространственно-временное управление позиционированием и манипулированием, представляющее собой сочетание управления и перемещения. Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ХИСР позволяет:
- ограничивать диапазон движения РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, например посредством виртуальных границ;
- изменять соотношение скорости и расстояния на входе ОПЕРАТОРА к выходу ХИИСР при движении РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, например гашение вибраций от дрожания рук;
- включать некоторые автоматизированные функции РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, например автоматическое выравнивание инструмента или ослабление крутящего момента режущего ИНСТРУМЕНТА;
- ориентировать, удерживать положение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА относительно тела ПАЦИЕНТА и компенсировать движения ПАЦИЕНТА;
- напрямую осуществлять движение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА без участия ОПЕРАТОРА.
Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА имеет большое значение для ХИИСР при выполнении его предполагаемой функции, а ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ управления движением должны быть установлены для каждого ХИИСР. Конкретные требования к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ будут зависеть от ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ ХИИСР.
Примеры ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК включают, помимо прочего, следующие:
- соответствие положения и скорости РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ данным, передаваемым ОПЕРАТОРОМ;
- точность позиционирования РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА в соответствии с вычисленным перемещением.
Существующие ХИИСР могут иметь только некоторые из них в качестве ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК. ИЗГОТОВИТЕЛЬ также может учитывать любые ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, указанные в других применимых специализированных частных стандартах.
Подпункт 201.4.6 Части МЭИ и МЭС, находящиеся в контакте с ПАЦИЕНТОМ
При ОЦЕНКЕ РИСКА необходимо учитывать следующее:
- ПАЦИЕНТЫ, подвергаемые ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ с помощью ХИИСР или ХСИСР, как правило, находясь под анестезией или другим воздействием неспособны воспринимать отрицательный раздражитель или реагировать на него;
- ХИИСР контактирует с частями оборудования во время прикрепления РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ и манипулирования ими в условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения (например, столкновение).
Подпункт 201.7.2.9 Классификация IP
Цель состоит в том, чтобы иметь более высокое значение класса IP для ПРИНАДЛЕЖНОСТЕЙ, определяющих данное значений класса IP для ХИИСР, которое без защитного покрытия может как иметь более низкий класс IP, так и не иметь обозначенного класса IP.
РОБОТОТЕХНИЧЕСКИЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, поставляемые со специальными инструкциями с подробным описанием допустимых методов и параметров обработки, исключены из требований по маркировке IP-класса, поскольку эта дополнительная маркировка не будет информировать ОПЕРАТОРА о деталях, необходимых для безопасной и эффективной обработки. Альтернативная маркировка (например, символом), заменяющая символ IP, не может быть стандартизирована настоящим стандартом из-за различных ПРОЦЕДУР обработки (см. также 7.9.2.12 общего стандарта).
Подпункт 201.8.5.2.101 Изоляция типа F
Примером требований к разделению РАБОЧЕЙ ЧАСТИ ТИПА F являются ХИИСР, предназначенные для позиционирования РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, который включает в себя эндоскоп с источником света и камерой и/или ВЫСОКОЧАСТОТНЫЕ ЭЛЕКТРОХИРУРГИЧЕСКИЕ ПРИНАДЛЕЖНОСТИ или инструменты. В соответствии с требованиями ГОСТ Р МЭК 60601-2-18 при применении ЭНДОСКОПИЧЕСКОГО ИЗДЕЛИЯ необходимо, чтобы соответствующие РАБОЧИЕ ЧАСТИ имели изоляцию ТИПА F относительно всех других частей оборудования.
Согласно 201.8.5.2.101 для любой РАБОЧЕЙ ЧАСТИ ТИПА F РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА должны быть выполнены требования к изоляции РАБОЧЕЙ ЧАСТИ ТИПА F во время ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ, включая все условия НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемого неправильного применения, которые могут возникнуть во время ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ (см. также 201.4.6 и 201.11.1.101.3).
Как правило, считают, что опорные поверхности ПАЦИЕНТА с РАБОЧЕЙ ЧАСТЬЮ ТИПА В обеспечивают приемлемый РИСК даже для ХИРУРГИЧЕСКИХ ОПЕРАЦИЙ, когда все хирургические инструменты являются РАБОЧИМИ ЧАСТЯМИ ТИПА F, на основании длительного клинического опыта, подтверждающего это заключение. В других случаях ИЗГОТОВИТЕЛЬ в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА может определить потребность в СРЕДСТВАХ УПРАВЛЕНИЯ РИСКАМИ для решения проблемы использования опорной поверхности ПАЦИЕНТА с РАБОЧЕЙ ЧАСТЬЮ ТИПА В.
Подпункт 201.8.9.1.1 Общие положения
Для РАБОЧИХ ЧАСТЕЙ РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ из-за требований к их конструкции, необходимых для удовлетворения соответствующих клинических требований, требования 8.9 общего стандарта может быть затруднительно или невозможно выполнить. Поскольку РОБОТОТЕХНИЧЕСКИЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ очищают и стерилизуют перед использованием, герметичные блоки и любые цепи внутри РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ всегда находятся на неосновной стороне, считают, что надлежащий уровень безопасности для этих частей будет обеспечен двумя СРЕДСТВАМИ ЗАЩИТЫ ОПЕРАТОРА со степенью загрязнения 1. Информация относительно степени загрязнения приведена в ГОСТ IEC 61010-1—2014 (приложение Е).
Подпункт 201.9 Защита от МЕХАНИЧЕСКИХ ОПАСНОСТЕЙ, создаваемых МЭИ и МЭС
ОПАСНЫЕ СИТУАЦИИ, связанные с МЕХАНИЧЕСКИМИ ОПАСНОСТЯМИ, создаваемыми ХИИСР, могут быть аналогичны ситуациям, связанным с другими типами роботов, такими как промышленные роботы. Однако для понимания отличий и определения приоритетов в части ОПАСНЫХ СИТУАЦИЙ от МЭИ следует руководствоваться требованием: «Безопасность ПАЦИЕНТА превыше всего».
Ниже приведены некоторые примеры ОПАСНЫХ СИТУАЦИЙ, связанных с МЕХАНИЧЕСКИМИ ОПАСНОСТЯМИ, создаваемыми ХИИСР, приведенные в ГОСТР 60.1.2.3—2016 (таблица А. 7), измененью для соответствия сценариям применения ХИИСР:
- перемещения (штатные или непредвиденные по команде одного или нескольких ОПЕРАТОРОВ) любой части ХИИСР;
- приведение в действие (штатное или непредвиденное по команде одного или нескольких ОПЕРАТОРОВ) любого элемента РАБОЧЕЙ ЧАСТИ;
- перемещения (штатные или непредвиденные по команде одного или нескольких ОПЕРАТОРОВ) любой независимой степени подвижности РАБОЧЕЙ ЧАСТИ;
- отказ РАБОЧЕЙ ЧАСТИ (отделение), в том числе ОПАСНОСТИ, связанные с выбросом посторонних предметов в ПАЦИЕНТА;
- неожиданное перемещение РАБОЧЕЙ ЧАСТИ, когда ХИИСР не настроен на хирургическое вмешательство;
- выброс материалов РАБОЧЕЙ ЧАСТЬЮ;
- непреднамеренное отпускание РАБОЧЕЙ ЧАСТИ;
- движение или вращение острых поверхностей ИНСТРУМЕНТА РАБОЧЕЙ ЧАСТИ;
- движение частей привода;
- вращение РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА;
- вращательное движение любой из степеней подвижности привода ХИИСР;
- наматывание незастегнутой или незаправленной одежды ОПЕРАТОРА;
- столкновение между ХИИСР и любым другим ЗАКРЕПЛЕННЫМ объектом в операционной;
- столкновение между РАБОЧЕЙ ЧАСТЬЮ и любым ЗАКРЕПЛЕННЫМ объектом в операционной;
- непреднамеренное высвобождение потенциальной энергии из источников внутри ХИИСР.
Примечание — Потенциальные ОПАСНЫЕ СИТУАЦИИ не ограничены перечисленными выше.
Подпункт 201.9.2.2.4.4 Защитные устройства
Требование изменено, чтобы учесть подсистемы ПЭМС (аппаратные или программные), которые являются защитными устройствами, связанными с движущимися частями. Примером могут служить БЕЗОПАСНЫЕ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ ПОДСИСТЕМЫ (ПЭПС), разработанные с помощью специального ПРОЦЕССА и работающие в специальной аппаратной среде, которые могут остановить движение за счет прямого доступа к тормозным механизмам ХИИСР.
Подпункт 201.9.2.2.5 Непрерывное воздействие
Требование изменено с учетом того, что в зоне действия ХИИСР находятся не только хирурги, но и другой персонал операционной. Следовательно, все ОПЕРАТОРЫ, осведомленные о ситуации, могут нести ответственность за непрерывное воздействие или активную остановку движения.
Подпункт 201.9.2.2.6 Скорость движения
Требование изменено, чтобы учесть, что ХИИСР имеет движущиеся части внутри и снаружи тела ПАЦИЕНТА, что может привести к различным ОПАСНОСТЯМ из-за скорости перемещения (см. приложение ВВ).
Подпункт 201.9.2.3.2 Выход за пределы диапазона перемещений
Требование изменено, чтобы учесть, что ХИИСР должно иметь механические концевые ограничители не в обязательном порядке. Возможны и другие средства предотвращения перехода через крайнее положение, например электромеханические концевые ограничители.
Подпункт 201.9.2.5 Освобождение ПАЦИЕНТА от креплений
Наименование подпункта сохранено из общего стандарта, и для ХИИСР это включает извлечение из ПАЦИЕНТА инструментов и ПРИНАДЛЕЖНОСТЕЙ.
Требование изменено, чтобы учесть тот факт, что ОПЕРАТОР может принять решение об освобождении ПАЦИЕНТА от креплений по медицинским показаниям, например: в экстренной ситуации, когда необходимо перевести ХИРУРГИЧЕСКУЮ ОПЕРАЦИЮ из режима, выполняемого с участием ХИИСР, в ручной.
Подпункт 201.9.2.101 Функции ЗАЩИТНОГО ОСТАНОВА ХИИСР
Наименование «ЗАЩИТНЫЙ ОСТАНОВ ХИИСР» намеренно отличается от предохранительного останова в других стандартах, чтобы избежать недоразумений. В приложении СС приведена информация о ЗАЩИТНОМ ОСТАНОВЕ ХИИСР и других функциях остановки ХИИСР Идентификация функциональных испытаний для оценки защитных мер для соответствующих УСЛОВИЙ ЕДИНИЧНОГО НАРУШЕНИЯ должна быть включена в ФАЙЛ МЕНЕДЖМЕНТА РИСКА.
Подпункт 201.9.4.2.4.3 Перемещение через препятствие
В соответствии с требованиями общего стандарта порог должен быть высотой 20 мм при скорости в ручном режиме 0,4 м/с. В ГОСТ Р МЭК 60601-2-18 установлено следующее требование: порог высотой 15 мм при скорости 0,3 м/с. Согласно поправке 1 к общему стандарту, опубликованной в 2012 г., снижена высота порога до 10 мм с радиусом закругления кромки 2 мм при скорости в ручном режиме 0,8 м/с. Общий стандарт с поправками и ГОСТ Р МЭК 60601-2-18 рассмотрены как подтверждающие допустимый РИСК для тележек (этажерок), связанных с эндоскопическими системами.
Подпункт 201.9.8.1 Общие положения
Подпункт 9.8 общего стандарта касается БЕЗОПАСНОСТИ конструктивного элемента, чтобы он не вызывал катастрофических повреждений, таких как обрушение. Однако манипулятор ХИИСР может быть как опорной системой, так и функциональным компонентом. Блок-схема на рисунке 201.АА. 105 является примером, классифицирующим эти случаи.
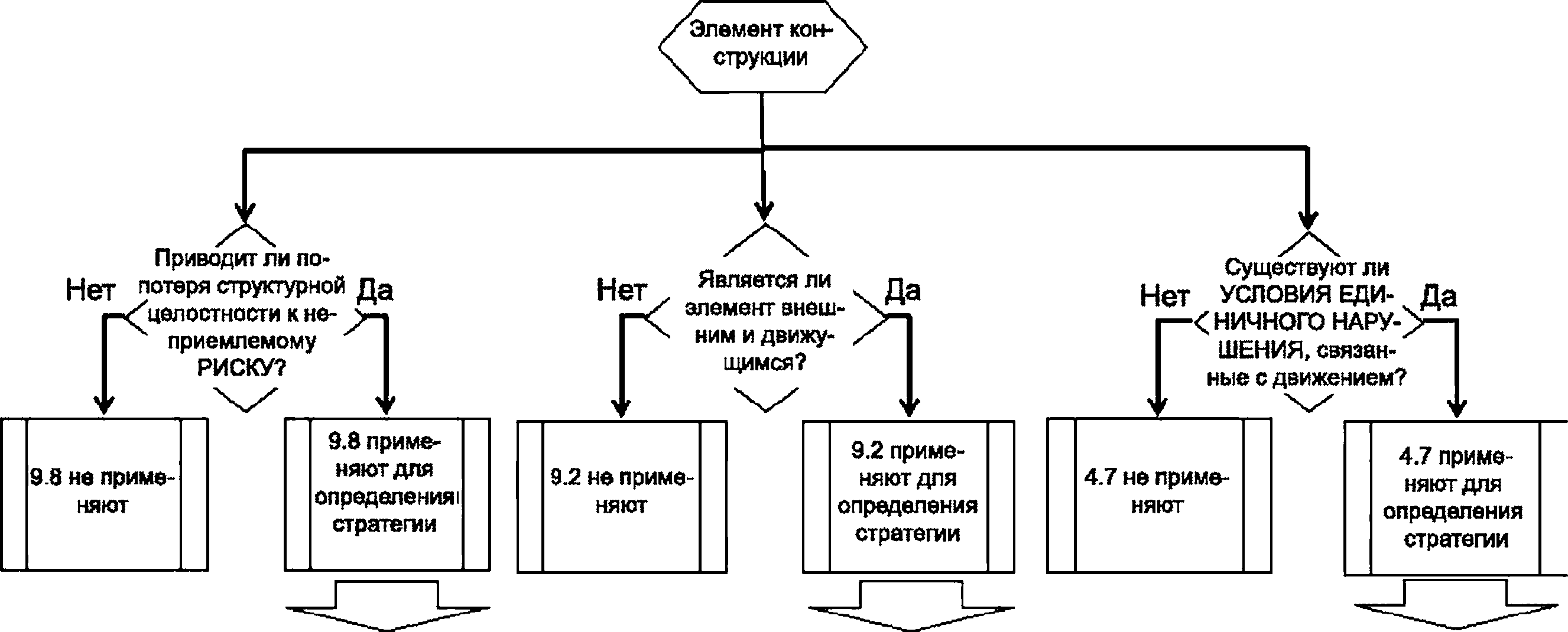
Компоненты /детали | 9.8 применяют | Стратегия | Обоснование применимости | 9.2 применяют | Стратегия | Обоснование применимости | 4.7 применяют | Стратегия | Обоснование применимости |
Тормоз, конструктивные элементы, винты, валы, склеивания, пружины | Да | Применяют коэффициент запаса прочности на растяжение равный 2,5 | Таблица 21-1 А;
| Нет | Непрмивнимо | Внутренний компонент | Да | При нормальных и прогнозируемых нагрузках непрвднамережое движение РОБОТИЗИРОВАННОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ограничено; - соответствует коэффициенту запаса прочности на растяжение для 9.8.2 | Отказ тормоза может привести к непреднамеренному движв-жю |
Тормоз, трущиеся компоненты / момент трения | Нет | Непримстммо | Виды отказов не приводят к потере целостности конструкции | Нет | Неприменимо | Внутренний компонент | Да | -Будет продемонстрировано, что тормозной момент трения достаточен при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и обоснованно прогнозируемом неправильном применении, и оборудование остается работоспособным в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ | Отказ тормоза может привести к непреднамеренному движе-жю. |
Элемент конструкции X / конструкции, винты, валы | Да | Применяют коэффициент запаса прочности на растяжение равный 2,5 | Таблица 21-1 А;
| Да | Промежутки в ЗОНЕ ЗАХВАТА согласно таблице 20; - для начала движения компонента требуется непрерывная активация | Элемент конструкции перемещается во время НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ и представляет ОПАСНОСТЬ заилила | Да | При нормальных и прогнозируемых нагрузках непрвднамережое движение РОБОТИЗИРОВАННОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ограничено; - соответствует коэффициенту запаса прочности на растяжение для 9.8.2 | Отклонение (сгиба-ние/деформация) или повреждение этого компонента может гриваста к перемещению РОБОТИЗИРОВАННОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА |
Рисунок 201.АА. 105 — Пример ОЦЕНКИ РИСКА, связанного с элементом конструкции
Подпункт 201.11.6.1 Общие положения
Защитные покрытия, такие как пленка для оборудования, могут быть подходящим средством для УПРАВЛЕНИЯ РИСКОМ для защиты от жидкости в качестве стерильной границы, что включает в себя требования по противодействию передаче патогенов и достаточной механической устойчивости к разрывам и проколам во время установки защитных покрытий.
Подпункт 201.11.101.3 Термические и другие ОПАСНОСТИ, создаваемые УСЛОВИЯМИ ВЗАИМОДЕЙСТВИЯ с ВЫСОКОЧАСТОТНЫМ ЭЛЕКТРОХИРУРГИЧЕСКИМ АППАРАТОМ
Тепловые воздействия могут возникать в результате взаимодействия между РАБОЧИМИ ЧАСТЯМИ в КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, без ЭНДОСКОПИЧЕСКОГО ИЗДЕЛИЯ за счет плотности ЕМКОСТНОГО ВЫСОКОЧАСТОТНОГО ТОКА. ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА ИЗГОТОВИТЕЛЯ следует использовать для выявления таких РИСКОВ, как при НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ, так и в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ, чтобы можно было применить соответствующие защитные устройства в качестве МЕР УПРАВЛЕНИЯ РИСКОМ в ходе ПРОЦЕССА проектирования и/или предусмотреть соответствующие предупреждения по технике безопасности в инструкциях по эксплуатации.
При наличии открытых проводящих частей ХИИСР, которые могут находиться в непосредственной близости от РАБОЧИХ ЧАСТЕЙ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА, может потребоваться изоляция для защиты ПАЦИЕНТА или ОПЕРАТОРОВ от теплового воздействия ЕМКОСТНОГО ВЫСОКОЧАСТОТНО-
ГО ТОКА. Изоляция может быть достигнута различными мерами, т. е. разделением компонентов или применением изоляционного материала.
С помощью МЕНЕДЖМЕНТА РИСКА можно определить, что протекание ЕМКОСТНОГО ВЫСОКОЧАСТОТНОГО ТОКА с доступной поверхности ХИИСР невозможно в НОРМАЛЬНОМ СОСТОЯНИИ и УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ. В других случаях может потребоваться измерение ЕМКОСТНОГО ВЫСОКОЧАСТОТНОГО ТОКА от каждой открытой проводящей части.
Метод испытаний, описанный и проиллюстрированный в ГОСТ Р МЭК 60601-2-18—2014 [201.11.101.2, перечисление с), 2)], может быть адаптирован для измерения ЕМКОСТНОГО ВЫСОКОЧАСТОТНОГО ТОКА. При проведении испытаний ВЫСОКОЧАСТОТНАЯ РАБОЧАЯ ЧАСТЬ [см. ГОСТ Р МЭК 60601-2-18—2014 (рисунок 201.102, позиция б)] должна быть установлена по назначению в КОНФИГУРАЦИИ ХИРУРГИЧЕСКОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЮЩЕГО СРЕДСТВА РОБОТОТЕХНИКИ, способом, представляющим наиболее неблагоприятные условия НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ во время ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ. Пока ВЫСОКОЧАСТОТНАЯ РАБОЧАЯ ЧАСТЬ находится под напряжением, ЕМКОСТНЫЙ ВЫСОКОЧАСТОТНЫЙ ТОК может быть измерен от доступных поверхностей ХИИСР в соответствии ГОСТ Р МЭК 60601-2-18—2014 (рисунок 201.102, позиция 7) через безындукционный резистор 200 Ом. Для непроводящих доступных поверхностей измерение может быть выполнено на металлической фольге размерами 100><100 мм, находящейся в тесном контакте с непроводящей поверхностью или иным образом представляющей 50 % наибольшей обоснованно прогнозируемой площади контакта.
В ГОСТ Р МЭК 60601-2-18 указано, что максимальный ВЧ ток силой 50 мА, протекающий от таких открытых проводящих частей, обеспечивает достаточную защиту, что предполагает, что площадь контактной поверхности участка кожи вокруг глаза хирурга находится в контакте с окуляром эндоскопа (т. е. примерно размером 100x100 мм). С помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА ИЗГОТОВИТЕЛЯ можно определить более подходящее предельное значение.
Подпункт 201.13.1.101 Информация, необходимая для выполнения ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ
Примеры данной информации включают, помимо прочего, следующее:
- эндоскопические изображения, предоставленные ОПЕРАТОРУ ХИИСР;
- информацию (данные) об отслеживании положения для привязки системы координат ХИИСР к расположению ПАЦИЕНТА;
- трехмерные модели костей, используемые для управления хирургической ПРОЦЕДУРОЙ.
Примеры ухудшения качества информации включают, помимо прочего, следующие случаи:
- эндоскопическое изображение не является изображением в режиме реального времени или поступает с недопустимой задержкой;
- поступление информации об отслеживании положения прерывается из-за загораживания маркеров отслеживания от камеры отслеживания;
- информация об отслеживании положения искажена в результате перемещения маркеров отслеживания ПАЦИЕНТА;
- трехмерные модели костей не точно отображают анатомию ПАЦИЕНТА из-за чрезмерного шума на КТ-изображениях или искажения MPT-изображений, что приводит к ухудшению точности совмещения.
Подпункт 201.13.1.102 Управление движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА
Примеры ухудшения характеристик управления движением РОБОТОТЕХНИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА включают, помимо прочего, следующее:
- задержку позиционирования и скорости РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ по сравнению с командами ОПЕРАТОРА;
- отклонение положения РОБОТОТЕХНИЧЕСКИХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ от рассчитанного пути, поверхности или статического положения.
ИЗГОТОВИТЕЛЬ может рассмотреть возможность использования других стандартов, например [4].
П римечание — В [4] не установлены обязательные методы испытаний точности, повторяемости и т. д., в связи с чем он не может быть применен к некоторым ХИИСР.
Подпункт 201.16 МЭС
МЕХАНИЧЕСКИЕ ОПАСНОСТИ и ОПАСНЫЕ СИТУАЦИИ могут возникнуть в МЭС, в состав которых входит ХИИСР. Требования пункта 9 общего стандарта и 201.9 необходимо применять к МЭС.
Программное обеспечение для планирования и хирургическое навигационное оборудование могут быть частью МЭС, в состав которых входит ХИИСР.
Подпункт 201.17 Электромагнитная совместимость МЭИ и МЭС
Данный подпункт эквивалентен требованию, установленному в ГОСТ Р МЭК 60601-1-2—2014 (4.2). Установлено, что проведение испытания УСЛОВИЙ ЕДИНИЧНОГО НАРУШЕНИЯ ХИИСР во время испытания на ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ нецелесообразно. Однако требования, перечисленные в ГОСТ Р МЭК 60601-1-2, не исключают полностью выполнение испытания в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
Определенные УСЛОВИЯ ЕДИНИЧНОГО НАРУШЕНИЯ могут оказать существенное неблагоприятное влияние на характеристики ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ МЭИ или МЭС. Некоторые методы борьбы с ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ позволяют перенаправить помехи на землю или рассеивать их в компонентах схемы. Если ПРОВОД ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ обрывается или смоделирован отказ компонента в фильтре во время испытаний на ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ, выполнение требований ГОСТ Р МЭК 60601-1-2 к ЭЛЕКТРОМАГНИТНЫМ ПОМЕХАМ может быть крайне затруднительным. Следовательно, испытания на ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ необходимо проводить в НОРМАЛЬНОМ СОСТОЯНИИ, а не в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ.
УРОВНИ ИСПЫТАНИЙ НА ПОМЕХОУСТОЙЧИВОСТЬ в ГОСТ Р МЭК 60601-1-2 считают репрезентативными для условий эксплуатации.
Вполне вероятно, что УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ может возникнуть в сочетании с ожидаемыми ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ или УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ может иметь место в средствах защиты от ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ, что может привести к ОПАСНОСТИ. Такие ОПАСНОСТИ следует учитывать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Пункт 206 ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ
Применяя ПРОЦЕСС ПРОЕКТИРОВАНИЯ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ к области применения ХИИСР, ИЗГОТОВИТЕЛИ могут учитывать, что профиль пользователя должен принимать во внимание опыт каждого хирурга в отношении ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ ХИИСР. Например, в ГОСТР МЭК 62366-1 определен профиль пользователя в соответствии с 3.29, включая особые характеристики, такие как профессиональные навыки, должностные требования и условия труда. Для ХИИСР или ХСИСР профиль пользователя может включать определение клинического опыта пользователя с точки зрения приблизительного общего количества хирургических ПРОЦЕДУР, проведенных пользователем, включая операции, выполненные как с ХИИСР, так и без них, а также совокупный опыт работы в ХИРУРГИИ. Пользовательский опыт также может включать в себя перечисление конкретных ХИИСР или ХСИСР. К пользователям ХИИСР или ХСИСР может быть отнесен квалифицированный персонал, которому необходимо взаимодействовать с устройством во время хирургической ПРОЦЕДУРЫ.
Приложение ВВ (справочное)
Уравнения для расчета общей характеристики остановки системы и минимальных расстояний
ВВ.1 Общие положения
Для выполнения требования 9.2.2.6 общего стандарта ИЗГОТОВИТЕЛЬ может оценить общую характеристику остановки и расстояние до остановки ХИИСР.
В данном приложении приведен пример метода их оценки с использованием простых уравнений, который не является единственно возможным, так как основан на методе, описанном в [5].
ВВ.2 Общая характеристика остановки системы
Общая характеристика остановки системы включает по крайней мере две временные фазы. Две временные фазы связаны с общим временем остановки системы 7, с, расчитываемым по уравнению
T=t^+t2, (ВВ.1)
где — максимальное время между возникновением срабатывания выходного сигнала защиты и достижением состояния ВЫКЛ;
t2 — время остановки.
включает в соответствующих случаях максимальное время задержки между возникновением события и временем, когда ПЭМС фактически его обнаружила. Время задержки ПЭМС может варьироваться в зависимости от временной последовательности ОПАСНОЙ СИТУАЦИИ, вызвавшей запрос на прерывание, или от того, опрашивает ли система входные данные или ОБРАБАТЫВАЕТ входные данные, чтобы определить наличие ОПАСНОЙ СИТУАЦИИ, требующей ЗАЩИТНОГО ОСТАНОВА ХИИСР.
t2 — максимальное время, необходимое для прекращения ОПАСНОЙ СИТУАЦИИ ХИИСР после того, как выходной сигнал защиты достигнет состояния ВЫКЛ. Время отклика системы управления ХИИСР включено в t2.
На и t2 влияют различные факторы, например: температура, время срабатывания стопорных устройств, старение компонентов.
и t2 показаны на рисунке 201.ВВ.101. Значения и t2 зависят от защиты и ХИИСР, соответственно, они определяются конструкцией и оцениваются путем измерения. Оценка этих двух значений будет включать погрешности, возникающие в результате измерений, расчетов и/или проектирования.
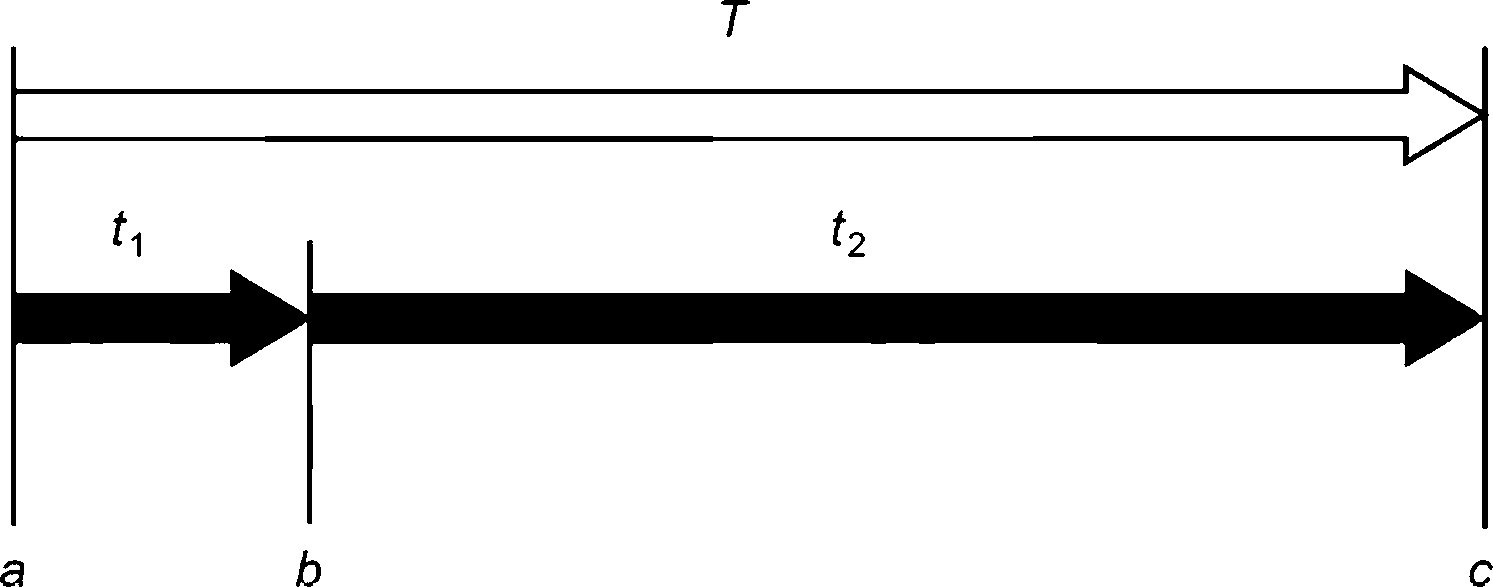
а — инициирование защиты; b — срабатывание защиты (генерируется сигнал ВЫКЛ); с— прекращение ОПАСНОЙ СИТУАЦИИ (безопасное состояние)
Рисунок 201.ВВ.101 — Связь между t1 и t2
Общее время остановки системы 7 является существенной характеристикой для размещения защитного устройства, такого как меры УПРАВЛЕНИЯ РИСКОМ. Любое отклонение времени останова машины t2 необходимо учитывать при оценке 7. Если время останова может ухудшиться в течение срока службы ХИИСР, то должны быть приняты технические или организационные меры для обеспечения надлежащей характеристики остановки системы. Такие меры могут включать, например:
- устройства контроля эффективности торможения;
- проверки, характер и периодичность которых должны быть определены в руководстве пользователя.
Примечание — Могут существовать дополнительные аспекты, которые следует учитывать, например: случаи, когда ненадлежащие характеристики остановки препятствуют применению приложения (например, невозможно остановить ХИИСР во время определенной фазы цикла или спрогнозировать эффективность останова).
Измерения характеристики торможения системы требуют тщательного рассмотрения, чтобы получить точные и актуальные временные значения.
ВВ.З Расстояние до остановки
Расстояние до остановки ХИИСР S, мм, относящееся к ОПАСНОЙ СИТУАЦИИ, можно рассчитать по уравнению
S = (K*T)±A, (ВВ.1)
где К — скорость, указанная ИЗГОТОВИТЕЛЕМ при наиболее неблагоприятных условиях, м/с;
Т — общее время остановки системы, с;
А — допуск расстояния до остановки, основанный на спецификациях ИЗГОТОВИТЕЛЯ или измерениях, мм.
Примечания
1 Значение А можно рассчитать исходя из измерения статистически значимого размера выборки.
2 Одной скорости при наиболее неблагоприятных условиях может быть недостаточно для полной характеристики безопасного расстояния до остановки. Возможно, потребуется учитывать и другие факторы, такие как масса и ускорение движущейся части и тормозное усилие двигателей.
Приложение СС (справочное)
Функции останова ХИИСР
СС.1 Общие сведения
Приложение СС содержит руководство по функциям останова ХИИСР.
Для останова ХИИСР может потребоваться сохранение управления, а не простое ручное вмешательство для активации аварийной остановки движения или аварийного отключения питания.
СС.2 Введение ЗАЩИТНОГО ОСТАНОВА ХИИСР
В некоторых случаях ХИИСР с помощью аппаратуры или ПЭМС может распознать, что необходимо произвести остановку или паузу в движении. Данная концепция ЗАЩИТНОГО ОСТАНОВА ХИИСР реализована в ХИИСР. В режиме ЗАЩИТНОГО ОСТАНОВА ХИИСР безопасное действие состоит в том, чтобы оставить питание включенным, что позволит ПЭМС продолжить контролировать механизм останова и следить за тем, сохраняется ли еще состояние ошибки, или, если оно устранено, движение можно возобновить.
Например, в случае системы отслеживания с камерой для ХИИСР, если человек встанет между маркерами отслеживания, прикрепленными к ПАЦИЕНТУ, и камерой, то данные о положении теряются, и ХИИСР реагирует на это остановкой движения. Если человек, стоящий между ПАЦИЕНТОМ и камерой отслеживания, уходит в сторону, то ОПЕРАТОР может активировать функцию возобновления движения, чтобы продолжить выполнение ПРОЦЕДУРЫ с того места, где она была прервана.
ЗАЩИТНЫЙ ОСТАНОВ ХИИСР определен в 201.9.2.101. Переход в данный режим остановки может быть автоматическим, как описано выше, а также ручным. Например, если ОПЕРАТОРУ необходимо перейти в режим остановки, чтобы предотвратить столкновение, он может нажать на кнопку, вызывающую паузу в движении; впоследствии операция может быть возобновлена, когда ОПЕРАТОР будет готов инициировать перезапуск. Во время такой паузы все данные позиционирования и питание могут сохраняться в аппаратных средствах и/или ПЭМС для облегчения продолжения выполнения хирургической ПРОЦЕДУРЫ после инициации перезапуска.
Данный режим отличается от обычной остановки движения, которая является запланированной остановкой в ходе выполнения штатного ПРОЦЕССА проведения хирургической ПРОЦЕДУРЫ.
Функция ЗАЩИТНОГО ОСТАНОВА ХИИСР может быть неотъемлемой частью обычной остановки в соответствии с техническими условиями на проектирование. В таблице 201.СС.101 показаны различия между тремя типичными функциями останова.
Таблица 201.СС.101 — Разные функции останова
Функция | Аварийный останов | ЗАЩИТНЫЙ ОСТАНОВ ХИИСР | Обычный останов |
Ситуация | Авария | Нештатная ситуация | Планируемое действие |
Инициирование | Ручное | Автоматическое или ручное | Автоматическое или ручное |
Требования | Требуется соблюдение 201.9.2.4 | Требуется соблюдение 201.9.2.101 | Зависит от конструкции |
Требование к перезапуску | Ручное | Автоматическое или ручное | Не применимо |
Частота использования | Редко | От частого до редкого | Постоянно |
Предполагаемый эффект | Немедленно прекратить ОПАСНУЮ СИТУАЦИЮ | УПРАВЛЕНИЕ РИСКОМ до приемлемого уровня | Приостановка операции |
СС.З Останов ХИИСР
ХИИСР должно быть спроектировано таким образом, чтобы обеспечить безопасный останов без возникновения каких-либо ОПАСНЫХ СИТУАЦИЙ, таких как опрокидывание, выход из-под контроля или выпадение частей ХИИСР в случае предполагаемого торможения на любой скорости.
Приложение DD (справочное)
Альтернативный метод доказательства целостности конструкции в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР
В соответствии с требованиями 201.9.8 конструкция опоры, системы подвески или приведения в действие должна быть спроектирована на основе таблицы 21 общего стандарта и ПОЛНОЙ НАГРУЗКИ. В качестве альтернативы используют метод, доказывающий целостность конструкции в течение ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР. В данном приложении приведен пример метода, который не является единственно возможным.
Для доказательства целостности конструкции на протяжении ОЖИДАЕМОГО СРОКА СЛУЖБЫ ХИИСР может быть использован ряд ресурсных испытаний, проведение которых, как правило, необходимо в течение фактического срока службы ХИИСР. Однако допустимы применение ускоренных методов испытаний и испытаний компонентов с нагрузкой, эквивалентной фактическому состоянию.
В таблице 201.DD. 101 показан типичный набор элементов проектирования и испытаний, которые могут подходить для ХИИСР, но также может относиться и к другим элементам. Элементы проектирования и испытаний должны быть идентифицированы в результате МЕНЕДЖМЕНТА РИСКА.
Таблица 201 .DD.101 — Альтернатива запасам прочности: испытание на долговечность (ресурсное испытание)
Компонент | Состояние отказа | Методы проектирования и испытаний для доказательства достаточной прочности компонента |
Электродвигатели | Повышение температуры двигателя, что приводит к выходу из строя встроенного компонента | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено до тех пор, пока температура двигателя не стабилизируется. Измеренная температура должна быть меньше значений, указанных в спецификации для всех встроенных компонентов, полимерных и химических материалов |
Нарушение вращения двигателя по причине: а) износа поддерживающих вращение деталей; Ь) потери или ухудшения электрического соединения, или с) поломки датчика ориентации вращения | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания двигатель должен быть полностью исправным. Параметры, обеспечивающие полную работоспособность двигателя, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА | |
Неисправность тормоза двигателя | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания тормоз двигателя должен быть полностью исправным. Параметры, обеспечивающие полную работоспособность тормоза двигателя, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА | |
Зубчатые колеса | Сколы/износ на зубьях шестерен, что приводит к люфту шестерни | Расчеты должны показать, что зубья шестерни будут выдерживать механические нагрузки в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ |
Продолжение таблицы 201.DD.101
Компонент | Состояние отказа | Методы проектирования и испытаний для доказательства достаточной прочности компонента |
Зубчатые колеса | Сколы/износ на зубьях шестерен, что приводит к люфту шестерни | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания зубчатые колеса должны быть полностью исправными. Параметры, обеспечивающие полную работоспособность зубчатых колес, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА |
Подшипники | Ухудшение состояния или поломка подшипников | Расчеты должны показать, что подшипник выдержит механические нагрузки в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ |
ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания подшипники должны быть полностью работоспособными. Параметры, обеспечивающие полную работоспособность подшипников, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА | ||
Металлические втулки | Ухудшение состояния или поломка металлических втулок | Расчеты должны показать, что металлические втулки выдержат механические нагрузки в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ |
ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно продолжаться в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания металлические втулки должны быть полностью работоспособными. Параметры, обеспечивающие полную работоспособность металлических втулок, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА | ||
Рамы | Деформация или поломка в процессе эксплуатации | Посредством конечно-элементного анализа (КЭА) расчеты должны определить наиболее слабую часть каждого компонента рамы, при этом следует смоделировать наиболее неблагоприятные условия НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Предел текучести или условный предел текучести 0,2 % прочности материала каждого компонента рамы должен быть больше, чем расчетное напряжение с достаточным запасом прочности |
ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Фактическое напряжение, появившееся на выявленном участке согласно КЭА, должно быть равно или меньше расчетного значения |
Продолжение таблицы 201.DD. 101
Компонент | Состояние отказа | Методы проектирования и испытаний для доказательства достаточной прочности компонента |
Рамы | Деформация или поломка в результате взаимодействия с внешними объектами | Необходимо запустить ХИИСР с максимальным параметром рабочей скорости и произвести столкновение с объектом. Применение и условия этого испытания должны быть основаны на результатах ФАЙЛА МЕНЕДЖМЕНТА РИСКА. Направление движения ХИИСР и расположение ударяющейся части ХИИСР во время столкновения должны создавать наибольшее напряжение для наиболее слабой части, рассчитанной согласно КЭА. Если при одном испытании невозможно создать максимальное напряжение на всех выявленных наиболее слабых участках, следует рассмотреть несколько режимов столкновения, чтобы можно было испытать каждый выявленный наиболее слабый участок. Испытание на столкновение должно быть выполнено не менее одного раза для каждого режима столкновения. Во время испытаний можно прибегнуть к помощи функции обнаружения или предотвращения столкновений, если оборудование является БЕЗОПАСНЫМ ПРИ ЕДИНИЧНОМ НАРУШЕНИИ. Если функция обнаружения или предотвращения столкновений может быть отключена в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ, то испытание проводят в УСЛОВИЯХ ЕДИНИЧНОГО НАРУШЕНИЯ. После каждого испытания на столкновение БЕЗОПАСНОСТЬ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ ХИИСР должны быть сохранены. В качестве альтернативы по завершении всех испытаний на столкновение могут быть проведены иные испытания, если этого требует ИЗГОТОВИТЕЛЬ. РАБОЧИЕ ЧАСТИ, работоспособность которых будет утрачена после столкновения, могут быть заменены новой деталью после каждого столкновения до повторного подтверждения БЕЗОПАСНОСТИ и ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК (см. 5.6 общего стандарта)3- ь |
Винты | Ослабление винта | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно продолжаться в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. Все винты должны оставаться на месте в каждой установленной части без какого-либо ослабления |
Смещение закрепленного компонента в результате взаимодействия с внешними объектами | В результате испытаний на столкновение, описанных выше, не должно наблюдаться смещения компонентов, закрепленных винтом | |
Уплотнение вращающихся элементов | Разрушение уплотнения | Расчеты должны показать, что давление воздуха внутри уплотнения в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ находится в пределах технических характеристик компонентов уплотнения |
ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. Фактическое давление воздуха, создающееся внутри уплотнения, должно быть равно или меньше расчетного значения давления воздуха. Не должно быть нарушения герметичности, приводящего к утечке масла/смазки. Если такие обстоятельства влияют на биосовместимость или стерильность ХИИСР, то необходимо руководствоваться 11.7 общего стандарта (см. также [6]) |
Окончание таблицы 201.DD.101
Компонент | Состояние отказа | Методы проектирования и испытаний для доказательства достаточной прочности компонента |
Внутренние провода | Обрыв провода | ХИИСР следует использовать в наиболее неблагоприятных условиях НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ. Испытание должно быть продолжено в течение времени, эквивалентного ОЖИДАЕМОМУ СРОКУ СЛУЖБЫ. После испытания провода, установленные в/на ХИИСР, должны оставаться полностью работоспособными. Параметры, обеспечивающие полную работоспособность проводов, должны быть указаны в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА. После испытаний все значения указанных параметров должны быть измерены и находиться в допустимых пределах. Допустимый диапазон каждого параметра должен быть указан в ФАЙЛЕ МЕНЕДЖМЕНТА РИСКА |
а Объектом для столкновения может быть, например, доска из твердой древесины толщиной (50 ± 5) мм (плотность древесины — >600 кг/м3), лежащая плоско на бетонном или аналогичном жестком основании. ь В случае двух или более движущихся частей, управляемых независимо друг от друга, следует учитывать режим столкновения друг с другом. Примечание — Может возникнуть необходимость рассмотреть дополнительные элементы, например:
| ||
Приложение ЕЕ (справочное)
Пример метода испытаний на ПОМЕХОУСТОЙЧИВОСТЬ к излучениям ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА
ЕЕ.1 Общие сведения
В соответствии с требованиями 202.8.102 необходима ПОМЕХОУСТОЙЧИВОСТЬ к излучению ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА. В данном приложении приведен пример метода испытания.
ЕЕ.2 Аспекты электромагнитных (ЭМ) явлений в сценариях применения ХИИСР
Существует несколько примечательных аспектов, связанных с электромагнитными явлениями в сценариях применения ХИИСР, в том числе:
- движение ХИИСР, включая контролируемую остановку, обычно поддерживается постоянно работающими контурами обратной связи;
- общеизвестно, что менее устойчивая система управления может быть более подвержена электромагнитному ИЗЛУЧЕНИЮ;
- тип и характеристики ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА могут быть ограничены предполагаемой хирургической ПРОЦЕДУРОЙ — может не потребоваться применение всех типов ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА;
- ИЗГОТОВИТЕЛЬ ХИИСР может указать, какой ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ можно использовать с ХИИСР;
- часть ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА и ВЫСОКОЧАСТОТНЫХ ЭЛЕКТРОХИРУРГИЧЕСКИХ ПРИНАДЛЕЖНОСТЕЙ, включая кабели, может быть включена в ХИИСР;
- ХИИСР может иметь на КОРПУСЕ токопроводящую часть: такие токопроводящие части могут быть (намеренно или случайно) частью цепи протекания ВЫСОКОЧАСТОТНОГО тока;
- аналогичным образом другая проводящая часть ХИИСР, отличная от КОРПУСА, также может быть частью цепи ВЫСОКОЧАСТОТНОГО тока при попадании проводящей жидкости, например солевого раствора.
ЕЕ.З Условия проведения испытаний
ЕЕ.3.1 Режимы ХИИСРВсе испытания следует выполнять в двух режимах:
- без инициирования движения ХИИСР;
- с активацией движения ХИИСР (может включать состояние контролируемой остановки).
Примечание — Первый относится к ОПАСНОСТИ непреднамеренного движения, второй — к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ.
При испытании с активацией движения ХИИСР следует применять наиболее неблагоприятные условия с точки зрения устойчивости управления движением (например, нагрузки, траектория, скорость).
Примечание — Наиболее неблагоприятные условия могут быть определены путем рассмотрения поведения системы управления (например, с использованием теории устойчивости по Ляпунову), допуска отклонения от предполагаемого движения к целевому положению или по траектории и времени.
Режимы ХИИСР и условия движения должны быть указаны в протоколе испытаний.
ЕЕ.3.2 Выбор и режимы ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО АППАРАТА
ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ (ВЧ ЭХА), используемый в испытаниях, может быть выбран:
- из указанных ВЧ ЭХА (указаны ИЗГОТОВИТЕЛЕМ ХИИСР), если применимо, и/или
- имеющихся на рынке ВЧ ЭХА (ВЧ ЭХА, соответствующий ГОСТ Р МЭК 60601-2-2, который можно использовать вместе с ХИИСР в предполагаемых хирургических ПРОЦЕДУРАХ), если применимо.
В последнем случае следует учитывать как НОРМАЛЬНУЮ ЭКСПЛУАТАЦИЮ, так и обоснованно прогнозируемое неправильное применение. НОРМАЛЬНАЯ ЭКСПЛУАТАЦИЯ может включать в себя исключительный случай, например переход к открытой хирургической ОПЕРАЦИИ с использованием ВЧ ЭХА, в то время как отведенное от ПАЦИЕНТА ХИИСР все еще находится в операционной с включенным питанием.
Режимы работы и настройки ВЧ ЭХА должны соответствовать наиболее неблагоприятным условиям. Режимы и настройки, используемые в испытаниях, могут соответствовать доступным режимам и возможностям выбранного ВЧ ЭХА и предполагаемым хирургическим ПРОЦЕДУРАМ с учетом следующих критериев:
а) мощность в режиме резания — 300 Вт, рабочие частоты — не менее (400 ± 100) кГц;
Ь) мощность в режиме коагуляции — 100 Вт, рабочие частоты — не менее (400 ± 100) кГц;
с) режим аргонно-плазменной коагуляции с пиковым напряжением — 4000 В (напряжение холостого хода) и мощностью 120 Вт.
Если указанный ВЧ ЭХА имеет характеристику мощности, менее указанной выше, следует применять максимальную мощность. Приведенную выше характеристику следует рассматривать как минимальную для имеющихся на рынке ВЧ ЭХА.
ВЧ ЭХА, режимы его работы и настройки, используемые в испытаниях, указывают в протоколе испытаний.
ЕЕ.3.3 Настройки для испытания
Соответствие проверяют следующим образом:
а) Один конец кабеля однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ подсоединяют к ВЧ ЭХА. Другой кабель одним концом подсоединяют к разъему нейтрального электрода ВЧ ЭХА, а другим концом — к металлической пластине. Используя однополюсную ВЧ ЭЛЕКТРОХИРУРГИЧЕСКУЮ ПРИНАДЛЕЖНОСТЬ, активируют ВЧ ЭХА в режиме прекращения подачи энергии. Затем образуют дугу между ПРИНАДЛЕЖНОСТЬЮ и металлической пластиной на 10 с. Данное испытание следует проводить в нижеприведенных ситуациях, если это применимо.
1) Для частей ХИИСР, не подключенных к ПАЦИЕНТУ (например, устройства управления, ножные выключатели ОПЕРАТОРА), которые могут находиться в пределах 2 м от кабеля ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ, необходимо обернуть кабель однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ вокруг КОРПУСОВ данных частей, чтобы обеспечить наличие не менее двух витков кабеля, но не более трех витков. Если часть ХИИСР чрезмерно велика для размещения двух витков кабеля, то следует обернуть как можно больше кабеля или накинуть кабель на те части ХИИСР, которые с наибольшей вероятностью будут соприкасаться с кабелем ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ.
2) Для ШНУРА ПИТАНИЯ ХИИСР необходимо обернуть кабель однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ вокруг ШНУРА ПИТАНИЯ. Достаточно трех витков кабеля. Данное испытание не проводят для ХИИСР, являющегося ИЗДЕЛИЕМ С ПОСТОЯННЫМ ПОДКЛЮЧЕНИЕМ К ПИТАЮЩЕЙ СЕТИ, для ХИИСР, не имеющего ШНУРА ПИТАНИЯ, или когда ШНУР ПИТАНИЯ ХИИСР не расположен в пределах 2 м от кабеля ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ.
3) Для частей ХИИСР, которые находятся в стерильной зоне, необходимо обернуть кабель однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ вокруг КОРПУСОВ данных частей вне тела ПАЦИЕНТА. Достаточно трех витков кабеля. Если данная часть чрезмерно мала для намотки кабеля, то данное испытание можно не проводить. При наличии нескольких частей, считающихся эквивалентными с точки зрения УСТОЙЧИВОСТИ К ЭЛЕКТРОМАГНИТНОМУ ИЗЛУЧЕНИЮ, для проведения испытания может быть выбрана одна из этих частей.
При отсутствии свободно расположенного кабеля однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ (например, в случае однополюсных ВЧ ЭЛЕКТРОХИРУРГИЧЕСКИХ ПРИНАДЛЕЖНОСТЕЙ, встроенных в ХИИСР) следует обернуть кабель нейтрального электрода. При отсутствии свободно расположенного кабеля нейтрального электрода данное испытание можно не проводить.
Если сочетание указанного ВЧ ЭХА и ВЧ ЭЛЕКТРОХИРУРГИЧЕСКИХ ПРИНАДЛЕЖНОСТЕЙ, выбранных для указанного ВЧ ЭХА, не может реализовать режим прекращения подачи энергии, то данное испытание можно не проводить.
Ь) Следует повторить действия по перечислению а) для режима коагуляции и режима аргон-плазменной коагуляции, если применимо. Кабель необходимо подключить надлежащим образом и обернуть кабель, как описано в перечислении а).
с) Следует повторить действия по перечислениям а) и Ь), накоротко замыкая цепь на 10 с.
d) Для частей ХИИСР со встроенной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТЬЮ и при отсутствии свободно расположенного кабеля для проведения испытания по перечислению Ь) следует установить ХИИСР со встроенной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТЬЮ согласно инструкции по эксплуатации. Необходимо выбрать заданный режим для ПРИНАДЛЕЖНОСТИ, активировать ВЧ ЭХА и создать дугу на ПРИНАДЛЕЖНОСТИ на 10 с. При наличии нескольких частей, считающихся эквивалентными с точки зрения УСТОЙЧИВОСТИ К ЭЛЕКТРОМАГНИТНОМУ ИЗЛУЧЕНИЮ, для проведения испытания может быть выбрана одна из них.
Примечание — В однополюсных ВЧ ЭЛЕКТРОХИРУРГИЧЕСКИХ ПРИНАДЛЕЖНОСТЯХ, встроенных в ХИИСР, обычно используют нейтральный электрод со свободно располагаемым кабелем, поэтому в данном случае применимо испытание по перечислению а).
е) Следует повторить действия по перечислению d) с замыканием цепи на 10 с.
f) Для самого ХИИСР следует провести нижеприведенное испытание. Если часть ХИИСР имеет токопроводящую часть на КОРПУСЕ и может преднамеренно или случайно стать частью цепи протекания ВЫСОКОЧАСТОТНОГО тока, то один конец кабеля однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТИ следует подключить к ВЧ ЭХА. Другой кабель одним концом необходимо подключить к разъему нейтрального электрода ВЧ ЭХА, а другим концом — к металлической пластине. Следует обеспечить касание металлической пластины с токопроводящей частью ХИИСР. Используя однополюсную ВЧ ЭЛЕКТРОХИРУРГИЧЕСКУЮ ПРИНАДЛЕЖНОСТЬ, необходимо активировать ВЧ ЭХА в режиме прекращения подачи энергии. Необходимо создать дугу между данной ПРИНАДЛЕЖНОСТЬЮ и другим положением токопроводящей части КОРПУСА ХИИСР на 10 с. Точки касания должны быть определены так, чтобы длина токопроводящего пути на КОРПУСЕ была наибольшей в прогнозируемой ситуации.
Примечание — Примером прогнозируемой ситуации является коагуляция кровеносного сосуда путем защемления пинцетом с последующим касанием пинцета монополярным лезвием.
д) Следует повторить действия по перечислению f) для режима аргонно-плазменной коагуляции, используя указанную ВЧ ЭЛЕКТРОХИРУРГИЧЕСКУЮ ПРИНАДЛЕЖНОСТЬ, если применимо.
h) Следует повторить действия по перечислениям f) и д) с коротким замыканием цепи на 10 с.
i) Если испытания по перечислениям f) — h) не применимы из-за отсутствия токопроводящих частей на КОРПУСЕ, то необходимо проверить, может ли попадание токопроводящей жидкости создать условия, аналогичные испытанию по перечислению f). Если может, то необходимо повторить испытание по перечислению f), погрузив часть ХИИСР и металлическую пластину в солевой раствор вместо того, чтобы обеспечить касание части ХИИСР к металлической пластине. Кроме того, следует создать дугу между однополюсной ВЧ ЭЛЕКТРОХИРУРГИЧЕСКОЙ ПРИНАДЛЕЖНОСТЬЮ и солевым раствором на 10 с вместо того, чтобы касаться КОРПУСА ХИИСР.
j) Следует повторить действия по перечислению i) для режима аргонно-плазменной коагуляции, используя заданную ВЧ ЭЛЕКТРОХИРУРГИЧЕСКУЮ ПРИНАДЛЕЖНОСТЬ, если применимо.
к) Необходимо повторить действия по перечислениям i) и j) с коротким замыканием цепи на 10 с.
Если ВЧ ЭХА имеет механизм защиты от короткого замыкания, то можно использовать нагрузку в виде манекена, имитирующего человеческое тело. Нагрузку следует выбирать минимальной, чтобы механизм защиты не срабатывал.
Если в испытании использована нагрузка в виде манекена, то это должно быть отмечено в протоколе испытаний.
Приложение ДА (справочное)
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА. 1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ Р МЭК 60601-1-2—2014 | IDT | IEC 60601-1-2:2007 «Изделия медицинские электрические. Часть 1-2. Общие требования безопасности с учетом основных функциональных характеристик. Параллельный стандарт. Электромагнитная совместимость. Требования и испытания» |
ГОСТ Р МЭК 60601-1-6—2014 | IDT | IEC 60601-1-6:2010 «Изделия медицинские электрические. Часть 1 -6. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Эксплуатационная пригодность» |
ГОСТ Р МЭК 62366-1—2023 | IDT | IEC 62366-1:2015 «Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности» |
ГОСТ Р МЭК 60601-1—2022 | IDT | IEC 62366-1:2020 «Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик» |
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT — идентичный стандарт. | ||
Библиография
[Д | МЭК 60601-1-9:2007 (IEC 60601-1-9:2007) | Изделия медицинские электрические. Часть 1-9. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к конструкции с учетом экологических проблем (Medical electrical equipment— Part 1-9: General requirements for basic safety and essential performance — Collateral Standard: Requirements for environmentally conscious design) |
[2] | МЭК 60601-1-11:2015 (IEC 60601-1-11:2015) | Изделия медицинские электрические. Часть 1-11. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к медицинским электрическим изделиям и медицинским электрическим системам, используемым для оказания медицинской помощи вне медицинской организации (Medical electrical equipment — Part 1-11: General requirements for basic safety and essential performance — Collateral Standard: Requirements for medical electrical equipment and medical electrical systems used in the home healthcare environment) |
[3] | МЭК 60601-2-52:2009 (IEC 60601-2-52:2009) | Изделия медицинские электрические. Часть 2-52. Частные требования к базовой безопасности и основным техническим характеристикам медицинских кроватей (Medical electrical equipment — Part 2-52: Particular requirements for the basic safety and essential performance of medical beds) |
[4] | АСТМ F2554-10 (ASTM F2554-10) | Стандартная практика по измерению точности позиционирования компьютеризированных хирургических систем (Standard Practice for Measurement of Positional Accuracy of Computer Assisted Surgical Systems) |
[5] | ИСО 13855:2010 (ISO 13855:2010) | Безопасность машин. Позиционирование защитного оборудования с учетом скорости сближения частей человеческого тела (Safety of machinery — Positioning of safeguards with respect to the approach speeds of parts of the human body) |
[6] | ИСО 10993 (все части) [ISO 10993 (all parts)] | Изделия медицинские. Оценка биологического действия медицинских изделий (Biological evaluation of medical devices) |
Примечание — Действуют идентичные ГОСТ ISO 10993 (все части) «Изделия медицинские. Оценка биологического действия медицинских изделий», которые рекомендуется использовать вместо ссылочных международных стандартов.
УДК 615.47:006.354
ОКС 11.040.01
11.040.30
25.040.30
Ключевые слова: роботы, робототехнические устройства, медицинское электрическое изделие, медицинская электрическая система, безопасность, основные функциональные характеристики, испытание, риск
Редактор Л. С. Зимилова Технический редактор В.Н. Прусакова Корректор М.И. Першина Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 29.09.2023. Подписано в печать 06.10.2023. Формат 60*841/8. Гарнитура Ариал. Усл. печ. л. 5,12. Уч.-изд. л. 4,10.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}