ГОСТ Р 59093-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Изделия медицинские имплантируемые
ОБЩИЕ ТРЕБОВАНИЯ БЕЗОПАСНОСТИ ПРИ ПРОВЕДЕНИИ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ
Методы испытаний
Medical implantable devices. General safety requirements for magnetic resonance tomography. Test methods
ОКС 11.040.55
Дата введения 2021-03-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Российский научно-технический центр информации по стандартизации, метрологии и оценке соответствия" (ФГУП ""), Государственным бюджетным учреждением здравоохранения города Москвы "Научно-практический клинический центр диагностики и телемедицинских технологий Департамента здравоохранения города Москвы" (ГБУЗ "НПКЦ ДиТ ДЗМ") и Обществом с ограниченной ответственностью "Медтехстандарт" (ООО "Медтехстандарт"). Авторский коллектив: главный внештатный специалист в области лучевой диагностики и инструментальной диагностики Департамента здравоохранения города Москвы и Министерства здравоохранения Российской Федерации в Центральном федеральном округе д-р мед. наук, проф. Морозов С.П., канд. техн. наук Сергунова К.А., технические эксперты Смирнов А.В., Семенов Д.С., Ахмад Е.С.
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 011 "Медицинские приборы, аппараты и оборудование"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 октября 2020 г. N 787-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт определяет уровень воздействия магнитно-резонансной (МР) среды на имплантируемое медицинское изделие (ИМИ).
В настоящем стандарте представлена классификация ИМИ по степени опасности при проведении МР-исследования.
Настоящий стандарт представляет собой свод рекомендаций, посвященных оценке влияния следующих факторов МР среды на ИМИ:
- поступательная сила, действующая на ИМИ;
- крутящий момент, действующий на ИМИ;
- нагрев ИМИ;
- вибрация ИМИ;
- нарушение функционирования активного ИМИ (АИМИ).
Результаты такой оценки могут быть использованы при классификации ИМИ по степени опасности при проведении МР-исследования как на этапе его проектирования, так и в отношении выпускаемого изделия.
1 Область применения
Настоящий стандарт устанавливает общие требования к процедуре оценки воздействия факторов магнитно-резонансной (МР) среды на имплантируемое медицинское изделие (ИМИ) с целью определения безопасности проведения МР-исследования пациентам с установленным изделием. Рассмотренные в стандарте методы испытаний могут быть применены при проектировании, производстве и испытаниях неактивных и активных ИМИ.
Вопрос отнесения конкретного ИМИ к той или иной категории классификации ИМИ по степени опасности при проведении МР-исследования по результатам испытаний не рассматривается в настоящем стандарте.
Настоящий стандарт не предназначен для решения проблем безопасности, связанных с использованием ИМИ и не относящихся к наличию МР-среды, если таковые имеются. Производитель (изготовитель) ИМИ несет ответственность за безопасность используемых ИМИ, подвергаемых магнитно-резонансной томографии (МРТ) в целях охраны здоровья пациентов с учетом нормативных ограничений.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р ИСО 14630 Имплантаты хирургические неактивные. Общие требования
ГОСТ Р ИСО 14708-1 Имплантаты хирургические. Активные имплантируемые медицинские изделия. Часть 1. Общие требования к безопасности, маркировке и информации, предоставляемой изготовителем
ГОСТ Р ИСО 14708-3 Имплантаты для хирургии. Активные имплантируемые медицинские изделия. Часть 3. Имплантируемые нейростимуляторы
ГОСТ Р ИСО 14708-4 Имплантаты для хирургии. Активные имплантируемые медицинские изделия. Часть 4. Имплантируемые инфузионные насосы
ГОСТ Р ИСО 14708-7 Имплантаты для хирургии. Активные имплантируемые медицинские изделия. Часть 7. Частные требования к системам кохлеарной имплантации
ГОСТ Р ИСО 25539-2 Имплантаты сердечно-сосудистые. Внутрисосудистые имплантаты. Часть 2. Сосудистые стенты
ГОСТ Р МЭК 60601-2-33-2013 Изделия медицинские электрические. Часть 2-33. Частные требования безопасности с учетом основных функциональных характеристик к медицинскому диагностическому оборудованию, работающему на основе магнитного резонанса
ГОСТ Р МЭК/ТО 60788 Изделия медицинские электрические. Словарь
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р МЭК 60601-2-33, ГОСТ Р ИСО 14630, ГОСТ Р ИСО 14708-1 и ГОСТ Р МЭК/ТО 60788, а также следующие термины с соответствующими определениями:
3.1 активное имплантируемое медицинское изделие; АИМИ: Имплантат, функционирующий за счет электрической энергии или любого другого источника энергии, за исключением сил гравитации или энергии, непосредственно генерируемой организмом человека.
3.2 гелеобразный солевой раствор: Среда, состоящая из хлорида натрия и полиакриловой кислоты или хлорида натрия и гидроксиэтилцеллюлозы в воде, занимающая объем фантома и имитирующая часть тела пациента.
3.3 изоцентр: Нулевая точка в координатной системе МР-оборудования, в которой значение пространственно-кодирующих градиентов равно нулю.
3.4 имплантируемое медицинское изделие; ИМИ (имплантат): Любое медицинское изделие, предназначенное для частичного или полного введения в тело человека путем хирургического вмешательства, которое должно временно или постоянно находиться в организме человека в медицинских целях.
3.5 исследовательская катушка: Катушка малого диаметра, используемая для определения градиентного выхода при проведении испытаний на соответствие.
3.6 магнитно-резонансная (МР) среда: Область контролируемого доступа, определяемая как объем в пределах линии 0,50 мТл (5 Гаусс) МР-системы, который включает весь трехмерный объем пространства, окружающего МР-сканер.
Примечания
1 Для случаев, когда линия 0,50 мТл не выходит за пределы клетки Фарадея, вся процедурная должна рассматриваться как МР-среда.
2 Область контролируемого доступа - см. ГОСТ Р МЭК 60601-2-33-2013, пункт 201.3.203.
3.7 магнитно-резонансная томография; МРТ: Метод визуализации, в котором используются статические и изменяющиеся во времени магнитные поля для получения изображений тканей с использованием магнитного резонанса ядер.
3.8 МР-безопасный имплантат: Имплантируемое медицинское изделие, которое не представляет никакой известной опасности во всех МР-средах.
Примечание - МР-безопасные изделия включают непроводящие немагнитные предметы, такие как полимерные ИМИ, а также ксенопланты и аллопланты. Элемент может иметь маркировку МР-безопасный в соответствии с научным обоснованием, а не по результатам испытаний.
3.9 МР-небезопасный имплантат: Имплантируемое медицинское изделие, которое, как известно, представляет опасность во всех МР-средах.
Примечание - К МР-небезопасным объектам относятся магнитные объекты, такие как стальные ИМИ.
3.10 МР-совместимый при определенных условиях: Имплантат, который (по результатам испытаний) не представляет опасности в указанной МР-среде при указанных условиях использования.
Примечание - Параметры магнитных полей, определяющих указанную МР-среду, включают: напряженность поля, пространственный градиент ![]() (скорость изменения магнитного поля во времени), радиочастотные (РЧ) поля и удельный коэффициент поглощения (УКП). Также могут быть указаны дополнительные условия, такие как пространственное расположение имплантата.
(скорость изменения магнитного поля во времени), радиочастотные (РЧ) поля и удельный коэффициент поглощения (УКП). Также могут быть указаны дополнительные условия, такие как пространственное расположение имплантата.
3.11 МР-тест-система: МР-система или устройство, воспроизводящие поле МР-системы.
3.12 радиочастотное (РЧ) магнитное поле: Магнитное поле в МРТ, которое используется для отклонения магнитных моментов.
Примечание - Частота РЧ-поля равна ![]() , где
, где - гиромагнитная постоянная, 42,56 МГц/Тл для протонов водорода, а
![]() - статическое магнитное поле, Тл.
- статическое магнитное поле, Тл.
3.13 фантом: Устройство, предназначенное для моделирования части тела пациента с целью проведения испытаний.
4 Классификация ИМИ
Все существующие на сегодняшний день ИМИ могут быть разделены на две основные группы: неактивные и активные.
К неактивным (пассивным) ИМИ в соответствии с ГОСТ Р ИСО 14630 относятся имплантаты, работа которых не зависит от электрической энергии или любого другого источника энергии, за исключением силы тяжести или энергии, непосредственно генерируемой телом человека. В данную категорию включены ортопедические эндопротезы суставов и разнообразные металлофиксаторы, а также искусственные сердечные клапаны и эндоваскулярные стенты, нейрохирургические и сосудистые клипсы, стенты, катетеры, порт-системы и прочие имплантируемые изделия. В этом случае основной опасностью является взаимодействие полей, создаваемых при МР-исследовании, с материалами, из которых состоят ИМИ. Результатом такого взаимодействия может являться нагрев, перемещение посредством действующих на объект силы или момента (см. [1]*).
___________________________
* Поз. [1]-[15] см. раздел Библиография, здесь и далее по тексту. - .
Вторая группа в соответствии с ГОСТ Р ИСО 14708-1 представляет собой активные имплантаты, функционирующие за счет электрической энергии или любого другого источника энергии, за исключением сил гравитации или энергии, непосредственно генерируемой телом человека. Категория активных имплантатов включает кардио- и нейростимуляторы, водители ритма (пейсмейкеры), стимуляторы блуждающего нерва, устройства глубокой стимуляции мозга, инсулиновые помпы, активные слуховые протезы и пр. Опасность активных имплантатов при нахождении в МРТ связана не только с материалами, из которых они изготовлены, но также с конструктивными особенностями, определяющими их функционирование.
5 Допустимые уровни воздействия
Определение допустимого уровня воздействия, вызванного наличием у пациента ИМИ, для каждого конкретного случая не является целью настоящего стандарта, однако могут быть даны следующие общие рекомендации:
- допустимый уровень нагрева ИМИ в процессе МР-исследования может быть определен исходя из ограничений ГОСТ Р МЭК 60601-2-33-2013 (пункт 201.12.4.103.1) в части нагрева тканей пациента;
- потенциально безопасным можно считать возникновение поступательной силы и крутящего момента, не превышающих по модулю соответствующие силу и момент, вызванные воздействием гравитационного поля.
6 Маркировка ИМИ
По результатам испытаний ИМИ относят к одной из трех групп с указанием соответствующих символов на маркировке и в сопроводительных документах (см. таблицу 1):
- МР-безопасные (MR-safe). К ним относятся имплантаты, являющиеся безопасными при работе в пространстве с максимальным значением индукции магнитного поля, создаваемого для проведения клинических МР-исследований, или изготовленные из безопасных с точки зрения взаимодействия с магнитным полем материалов (пластик, силикон, стекло и пр.);
- МР-совместимые при определенных условиях (MR-conditional). Данные имплантаты считаются безопасными при условии непревышения максимально допустимых значений параметров сканирования [величины индукции магнитного поля (Тл), амплитуды градиентов (Тл/м), скорости нарастания градиентов (Тл/м/с), удельного коэффициента поглощения (Вт/кг), длительности сканирования (с)];
- МР-небезопасные (MR-unsafe), которые могут представлять опасность при работе в МР-пространстве (см. [2]).
Таблица 1 - Классификация ИМИ по МР-совместимости
Условное обозначение | Наименование | Примечание |
| МР-безопасные | Не представляют опасности при работе в |
| МР-совместимые при определенных условиях | Являются безопасными при соблюдении следующих требований: |
| МР-небезопасные | Представляют потенциальную опасность при работе в МР-пространстве |



Согласно ГОСТ Р ИСО 14630, ГОСТ Р ИСО 14708-3, ГОСТ Р ИСО 14708-4, ГОСТ Р ИСО 14708-7 и ГОСТ Р ИСО 25539-2 каждый имплантат должен быть снабжен инструкцией по эксплуатации (руководством пользователя), включающей данные по безопасности и совместимости с МРТ. Информацию об МР-совместимости имплантата следует предоставить пациенту в виде сопроводительной документации и/или указать в выписном эпикризе, а также в виде соответствующей записи в истории болезни.
7 Испытания для оценки МР-совместимости ИМИ
МР-совместимость имплантата определяется по результатам серии экспериментов, общей целью которых является определение максимального уровня влияния каждого из факторов риска, указанных в приложении А, на пациента с ИМИ.
Принятие решения об МР-совместимости ИМИ по результатам испытаний выходит за пределы настоящего стандарта.
7.1 Неактивные ИМИ
7.1.1 Нагрев неактивных имплантатов в радиочастотном магнитном поле
Это экспериментальное исследование необходимо для определения того, может ли присутствие неактивного имплантата причинить вред пациенту с имплантатом во время МР-исследования. Данный метод описан в [3].
Величина нагрева тканей, вызванного воздействием радиочастотного магнитного поля (РЧ-нагрев), определяется значением УКП и индукцией постоянного магнитного поля.
Метод испытания применим к медицинскому диагностическому оборудованию, работающему на основе магнитного резонанса (МР-оборудованию), описанному в ГОСТ Р МЭК 60601-2-33, с радиочастотной передающей катушкой всего тела. Предполагают, что РЧ-катушка имеет квадратурное возбуждение.
Представленную методику применяют к МР-тест-системам закрытого типа с индукцией 1,5 или 3,0 Т. Для определения РЧ-нагрева неактивных имплантатов в системах открытого типа или с отличным значением индукции постоянного магнитного поля необходимо соответствующим образом модифицировать методику испытания.
Предполагают, что данную методику применяют для неактивных ИМИ, которые полностью располагаются внутри тела пациента.
Для других условий имплантации (например, устройства для внешней фиксации, чрескожные иглы, катетеры или привязные устройства, такие как зонды для абляции) необходима модификация данного метода испытаний.
7.1.1.1 Краткое изложение метода испытаний
Исследуемый имплантат помещают в фантом, содержащий гелеобразный солевой раствор, имитирующий электрические и теплофизические свойства человеческого тела. Имплантат размещают в месте с четко охарактеризованными условиями воздействия. В области размещения для характеристики условий воздействия оценивают локальный УКП.
Температурные датчики размещают в местах, где ожидают, что индуцированный нагрев имплантата будет наибольшим (для этого могут потребоваться дополнительные экспериментальные исследования по определению корректного размещения температурных датчиков). Фантом помещают в МР-тест-систему или устройство, которое воспроизводит РЧ магнитное поле такой МР-тест-системы. РЧ-поле с энергией, обеспечивающей УКП всего тела примерно 2 Вт/кг и усредненной по объему фантома, прикладывают в течение приблизительно 15 мин или другого времени, достаточного для выявления повышения температуры и локального УКП.
Нагрев измеряют волоконно-оптическими термометрическими датчиками (или с использованием эквивалентной технологии). Процедуру испытаний делят на два этапа. На первом этапе повышение температуры на поверхности имплантата или рядом с ним в нескольких местах фиксируют в течение приблизительно 15-минутного воздействия РЧ-поля. Кроме того, на протяжении всего первого этапа проводят регистрацию температуры раствора на некотором удалении от ИМИ для контроля корректности протекания исследования. На втором этапе имплантат удаляют из фантома и проводят процедуру, аналогичную проведенной на первом этапе с регистрацией температуры в тех же точках. Для точного позиционирования имплантата и датчиков необходимо использование держателя. Локальный УКП рассчитывают из измерений температуры для каждого местоположения датчика, включая контрольное измерение. Локальное значение УКП на контрольном датчике температуры используют для проверки того, что на первом и втором этапах применяют те же параметры РЧ-воздействия.
7.1.1.2 Значение и использование
В приведенной методике описана процедура испытаний для оценки повышения температуры, вызванного воздействием определенной частоты РЧ-поля, которое связано с процедурой проведения МР-исследования. Измерения температуры проводят дважды: один раз с имплантатом, а затем - в том же месте без имплантата. Эти два измерения позволяют оценить локальное значение УКП и локальное повышение температуры, вызванное присутствием имплантата.
Результаты могут быть использованы в качестве входных данных для вычислительной модели оценки повышения температуры вследствие наличия этого имплантата у пациента. Комбинация результатов теста и результатов вычислительной модели может быть затем использована для оценки безопасности пациента с имплантатом во время МР-исследования.
7.1.1.3 Оборудование
Испытательное оборудование состоит из фантома и МР-тест-системы или экспериментальной установки, обеспечивающей РЧ-поле, эквивалентное создаваемому МР-тест-системой. Фантом, имплантат и МР-тест-система используются для аппроксимации электрической и физической сред, воздействующих на пациента и имплантат во время МР-исследования. Фантом, имплантат и МР-тест-систему используют для определения нагрева имплантата в известном распределении РЧ-поля в стандартизированном фантоме.
Датчик температуры - устройство для измерения температуры, применимое в условиях кабинета МРТ, обычно оптоволоконный или флюороптический термометрический датчик. Датчик температуры должен иметь цену деления не более 0,1°С. Пространственное разрешение датчика температуры не должно превышать 1 мм вдоль определенной оси измерения в любом направлении, а временное разрешение - 4 с.
7.1.1.4 Объект испытаний
Хотя этот метод испытания может быть использован на прототипах или моделях, разрабатываемых ИМИ, для проведения испытаний имплантат необходимо привести в соответствующее состояние, как после имплантации, или в месте имплантации. Например, стенты, расширяемые при имплантации баллоном, должны быть раскрыты до нужного диаметра.
Для проведения испытаний устройство имплантатов не должно быть изменено каким-либо образом перед испытаниями, кроме позиционирования/намотки или другого изменения конфигурации имплантата, выполненного для ориентации его в ожидаемом наихудшем сценарии для частоты конкретной МР-тест-системы.
7.1.1.5 Фантом
Устройство фантома
Корпус фантома представляет собой контейнер, обеспечивающий соответствие размеров гелеобразного наполнителя размерам, представленным на рисунке 1. Фантом и все его части должны быть изготовлены из материалов, которые являются электрическими изоляторами, немагнитными и неметаллическими.
Гелеобразный солевой раствор, показанный на рисунке 1, имеет объем приблизительно 24,6 л. Гелеобразный солевой раствор с дополнительной частью (изображена пунктирной линией, не является обязательным элементом конструкции) имеет объем приблизительно 28,2 л. Для проведения испытаний больших устройств может потребоваться увеличение глубины корпуса и соответственно объема гелеобразного солевого раствора.
|
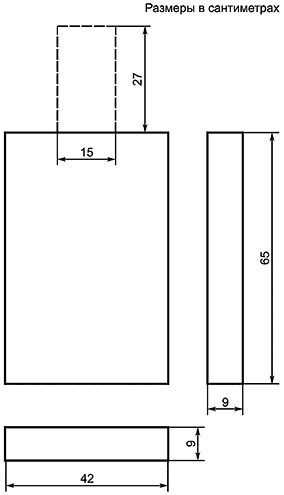
Рисунок 1 - Размеры гелеобразного солевого раствора в фантоме
Примечания
1 На рисунке 1 показаны размеры гелеобразного солевого раствора в фантоме, а не размеры контейнера.
2 Может потребоваться выполнение нескольких измерений вблизи точки установки датчика для подтверждения выбора точки с максимальным повышением температуры.
3 Датчик температуры должен быть нечувствительным по отношению к приложенному радиочастотному полю и не должен создавать значительных помех для локального электрического поля (полей). Предполагают, что датчики, не являющиеся электропроводящими, соответствуют данному требованию.
Материал фантома
Гель, имитирующий ткань для испытания на радиочастотный нагрев, должен соответствовать перечисленным ниже критериям.
Проводимость. Проводимость гелеобразного солевого раствора при температуре испытания должна составлять 0,47 См/м±10%.
Примечание - Данное значение проводимости соответствует среднему значению проводимости тела пациента.
Электропроводность, измеренная в мегагерцовом диапазоне, выше, чем электропроводность, измеренная в килогерцовом диапазоне, поэтому для проводимости при 64 и 128 МГц действительны измерения, выполненные на более низких частотах.
Относительная диэлектрическая проницаемость. Относительная диэлектрическая проницаемость (![]() ) должна составлять 80±20 при частоте, соответствующей частоте поля выбранной МР-тест-системы (64 или 128 МГц).
) должна составлять 80±20 при частоте, соответствующей частоте поля выбранной МР-тест-системы (64 или 128 МГц).
Тепловые параметры. Гелеобразный солевой раствор фантома должен иметь теплофизические характеристики, аналогичные соответствующим характеристикам тела, у которого коэффициент диффузии составляет приблизительно 1,310
м
/с и теплоемкость - 4150 Дж/(кг·°С).
Вязкость. Вязкость должна быть достаточно большой, чтобы материал фантома не допускал объемного переноса или конвекционных токов. Как правило, это достигается путем включения гелеобразующего агента.
Состав. Подходящий гелеобразный водный солевой раствор, обладающий свойствами, описанными выше, может быть получен достижением концентраций 1,32 г/л NaCl и 10 г/л полиакриловой кислоты. Для такого состава проводимость при комнатной температуре составляет приблизительно 0,47 См/м, а вязкость достаточна для предотвращения конвективного переноса тепла.
Необходимо строго следовать протоколу смешивания и использовать данные ингредиенты для достижения надежных и воспроизводимых результатов. Полученный гель должен иметь проводимость 0,47 См/м±10% при температуре от 20°С до 25°С. Проводимость не должна изменяться при 64 или 128 МГц. Удельная теплоемкость геля составляет 4150 Дж/(кг·К) при 21°С, и наблюдается линейное повышение на 2,35 Дж/(кг·К) при температуре от 20°С до 40°С. Гелеобразный солевой раствор должен иметь срок годности два месяца. Раствор должен быть заменен при изменении какого-либо свойства (объем, проводимость, цвет или вязкость). Фантом должен быть упакован при возможности в герметичный контейнер, чтобы предотвратить испарение и/или загрязнение и избежать изменения свойств раствора.
Примечание - Цель состоит в том, чтобы получить гель проводимостью 0,47 См/м на частотах 64 и 128 МГц. В связи с недоступностью точных методов измерения проводимости при таких частотах допустимым является проведение контрольных измерений при частотах от 1 до 15 кГц.
Ингредиенты солевого раствора полиакриловой кислоты:
- вода - деионизированная или дистиллированная вода, проводимость которой меньше 1 мСм/м;
- NaCl - чистота реагента >99%;
- полиакриловая кислота.
Примечания
1 Реактивы могут иметь различные гелеобразующие свойства. Показано, что "Polyacrylic acid partial sodium salt" N 436364 производства Aldrich (CAS N. 76774-25-9) соответствует указанным выше требованиям.
2 Также может быть использован альтернативный состав геля: 1,55 г/л NaCl и 31 г/л гидроксиэтилцеллюлозы (ГЭЦ).
Приготовление гелеобразного солевого раствора:
- добавляют NaCl к воде и перемешивают до полного растворения;
- убеждаются, что проводимость составляет 0,26 См/м±10% при 25°С и частоте ниже 15 кГц;
- добавляют полиакриловую кислоту или ГЭЦ и перемешивают до полного растворения. Следует добавлять гелеобразующий компонент в подогретый солевой раствор малыми порциями во избежание образования сгустков;
- постоянно перемешивают раствор в течение не менее 3 ч. Избегают образования пузырьков воздуха и слоев с разной плотностью в объеме фантома;
- раствор готов к использованию через 24 ч. Время от времени раствор помешивают. Раствор должен быть полупрозрачным, без пузырьков и без комков любого различимого размера;
- убеждаются, что проводимость, измеренная на частотах ниже 15 кГц, составляет 0,47 См/м±10% при 20°С-25°С.
Примечание - В процессе эксплуатации раствор следует периодически перемешивать.
7.1.1.6 Расположение имплантата и конфигурация с максимальным нагревом
Измерение величины нагрева имплантата во время МР-исследования следует проводить для такой конфигурации и ориентации, при которой изменение температуры будет максимальным. Определение такой конфигурации предполагает знание электрических (проводимость, диэлектрическая проницаемость) и теплофизических (теплоемкость, теплопроводность, теплоотдача) характеристик как имплантата, так и окружающей среды. Кроме того, необходимо учитывать геометрические (размеры и ориентация в пространстве), а также, конструктивные (тип и количество компонентов) особенности системы имплантат - фантом и параметры МР-тест-системы.
Обоснование выбора конфигурации должно быть указано в протоколе исследования.
В случае, когда теоретический выбор конфигурации затруднителен, методика предполагает повторное исследование в нескольких конфигурациях.
Примечание - Радиочастотный нагрев устройства в определенной конфигурации фантома не гарантирует идентичный нагрев имплантата в геометрически соответствующем месте в теле пациента, поскольку локальные распределения радиочастотной энергии и УКП могут в значительной степени различаться.
Все многокомпонентные и гибкие медицинские устройства и имплантаты потенциально являются МР-несовместимыми. Эти устройства нуждаются в тщательной оценке МР-нагрева. Чтобы оценить их безопасность в МР-среде, необходимо рассмотреть все соответствующие конфигурации устройств и несколько различных ориентаций относительно воздействующего электрического поля томографа. Вариабельность возможных конфигураций и невозможность проведения значительного числа исследований может привести к необходимости сокращения количества рассматриваемых конфигураций.
Примечания
1 Потенциально МР-несовместимое медицинское устройство - это устройство, которое может подвергаться сильному нагреву во время воздействия МРТ. Эта группа включает АИМИ (имплантаты с внешними элементами питания) и удлиненные металлические структуры в диапазоне длин, для которых устройство становится резонансным в МР-тест-системе (см. [4]).
2 Устройство для крепления вертела состоит из пластины вертела и трех гибких кабелей, которые обжимаются в три отдельные петли и пропускаются через три проксимальных паза в пластине. Пластина с гибкой кабельной сборкой дает бесконечное количество возможных конфигураций, требующих рассмотрения.
3 То же может быть сказано об ортопедических системах протезирования тазобедренного сустава, состоящих из трех разных типов чашек, пяти различных вкладок, трех разных головок, четырех разных бедренных стержней, и каждый компонент может иметь три разных материала и десять разных размеров, а также два разных типа имплантации (с цементом и без него). Также предполагают, что система имплантатов может быть в двух разных ориентациях относительно ![]() . Теоретически это дает 583200 различных случаев только для одной напряженности магнитного поля.
. Теоретически это дает 583200 различных случаев только для одной напряженности магнитного поля.
Определение конфигурации ИМИ, обеспечивающей максимальный нагрев, в таком случае может быть затруднительным. Для сокращения общего числа возможных конфигураций до приемлемого значения могут быть использованы базовые принципы радиочастотного моделирования и экспериментальные исследования. Так, можно продемонстрировать, что нагрев одной из трех разных чашек в предыдущем примере выше других. Этот факт является обоснованием использования данной чашки при определении максимального нагрева. Кроме того, допустима демонстрация эквивалентности изделий с незначительно отличающимися характеристиками (например, в случае разных покрытий) с использованием ограниченного числа экспериментальных исследований.
Кроме того, допустим расчетный метод определения положения с максимальным нагревом, основывающийся на моделировании воздействия электромагнитных полей. В данном случае это позволит сократить число и сложность экспериментов, однако полностью не заменит их.
Примечания
1 Важно убедиться в получении достаточного количества расчетных и экспериментальных данных при определении положения максимального нагрева.
2 Если проводящие компоненты могут образовывать петли большого диаметра, эта конфигурация может представлять случай максимального нагрева. Высокий нагрев может также возникнуть в длинных тонких устройствах с большим отношением длины к диаметру или на острых краях, точках, концах устройств и в углах (см. [5]-[7]).
7.1.1.7 Держатель имплантата
Для обеспечения правильного размещения имплантата внутри фантома с гелеобразным раствором следует применять держатель имплантата. Поскольку любой такой держатель может оказать локальное влияние на электромагнитное поле, держатель должен быть изготовлен из соответствующих материалов (например, неметаллических, непроводящих) и должен быть достаточно компактным, надлежащим образом ориентированным и достаточно удаленным от мест измерения температуры. На рисунке 2 показан пример подходящих держателей имплантата - маленьких цилиндров диаметром менее 5 мм. Они могут быть расположены в любой требуемой ориентации, если они не будут существенно изменять локальную электрическую или тепловую среду.
|
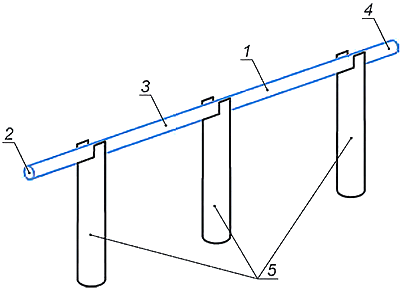
1 - имплантат; 2 - температурный датчик 1; 3 - температурный датчик 2; 4 - температурный датчик 3; 5 - держатель
Рисунок 2 - Пример подходящего держателя имплантата
Пространственное расположение держателя должно обеспечивать его перпендикулярность линиям индукции поля в объеме фантома: перпендикулярно к нижней или боковой стенке фантома. Поскольку отличие материала держателя от окружающей его среды может вызвать неоднородность электромагнитного или теплового полей, недопустимо расположение датчиков температуры на расстоянии ближе двух диаметров держателя имплантатов, чтобы минимизировать влияние на измерения.
7.1.1.8 Размещение имплантата в известном поле
Положение имплантата в фантоме должно быть выбрано таким образом, чтобы выполнялись следующие требования:
- в этой области пространства известны распределения локального фонового УКП и напряженности электрического поля ![]() ;
;
- локальное повышение температуры в этой области в результате проведения МР-исследования без имплантата не менее чем в 10 раз превышает точность измерений температуры;
- изменение невозмущенного электромагнитного поля вдоль объема, занимаемого имплантатом, незначительно;
- расстояние от предполагаемого места расположения имплантата до поверхности раствора, дна или стенок контейнера превышает 2 см для сведения к минимуму теплообмена с окружающей средой.
Примечания
1 В случае стандартного прямоугольного фантома, расположенного в изоцентре магнита, и продольного расположения имплантата в 2 см от стенки фантома размер области с достаточно однородным тангенциальным электрическим полем составляет приблизительно 15 см.
2 Метод определения электрического поля и результаты для РЧ-катушки типа "беличья клетка" МРТ с индукцией постоянного магнитного поля 1,5 Тл представлены в [8].
3 Определение конфигурации с максимальным нагревом предполагает необходимость проведения значительного количества измерений.
4 Для ИМИ большего размера относительно однородной области поля существует вероятность выхода его частей за пределы области максимального нагрева. В таком случае следует для каждого измерения температуры имплантата определить отношение ![]() , где
, где ![]() - величина нагрева имплантата,
- величина нагрева имплантата, ![]() - величина нагрева соответствующей области фантома при проведении идентичного МР-исследования без имплантата. При превышении для какой-либо части имплантата значения
- величина нагрева соответствующей области фантома при проведении идентичного МР-исследования без имплантата. При превышении для какой-либо части имплантата значения ![]() относительно области с высокой напряженностью поля необходимо провести дополнительное испытание (например, с измененным положением имплантата в фантоме или при использовании другого фантома) и анализ.
относительно области с высокой напряженностью поля необходимо провести дополнительное испытание (например, с измененным положением имплантата в фантоме или при использовании другого фантома) и анализ.
7.1.1.9 Установка для измерения температуры фантома
Определяют места максимального нагрева имплантата. Это может быть сделано теоретическими и/или экспериментальными методами для конкретного тестируемого ИМИ и его конфигурации. Закрепляют минимум три температурных датчика в этих местах или рядом с ними, позиционируя их с точностью не хуже, чем ±0,5 мм. Для обеспечения контроля повторяемости результата располагают контрольный датчик на значительном удалении от имплантата в области высокой напряженности поля и поглощаемой РЧ-энергии. Оптимальное положение для контрольного датчика может быть на противоположной от имплантата стороне фантома относительно продольной оси, проходящей через геометрический центр фантома (см. рисунок 3). Расстояние до имплантата при этом составит не менее 15 см.
|
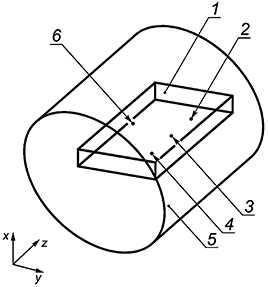
1 - фантом; 2 - температурный датчик 1; 3 - температурный датчик 2; 4 - температурный датчик 3; 5 - передающая РЧ-катушка всего тела; 6 - эталонный температурный датчик 4
Примечание - Температурные датчики 1, 2 и 3 находятся в местах наибольшего нагрева на имплантате или рядом с ним. Датчик температуры 4 является эталонным датчиком температуры.
Рисунок 3 - Схема устройства для определения радиочастотного нагрева вблизи имплантата во время МРТ
Примечания
1 Для небольших ИМИ, на поверхности которых расположить три температурных датчика затруднительно, допустимо использование меньшего числа измерений.
2 Чувствительная часть датчика температуры может изменяться от датчика к датчику. Чувствительная зона каждого из них должна быть определена до начала исследования (см. [5]).
3 Нагрев имплантата во время МР-исследования может быть несимметричным (см. [9], [10]), поэтому может потребоваться значительное количество измерений для определения точки с максимальной температурой. Так, для вытянутых имплантатов, наиболее вероятным является значительный нагрев концов. Также повышенный нагрев может быть зарегистрирован на остроконечных элементах и гранях.
7.1.1.10 Алгоритм подготовки к эксперименту:
- устанавливают имплантат с датчиками в фантом с использованием держателя имплантата в конфигурации, обеспечивающей максимальный нагрев;
- заносят в протокол испытаний размеры имплантата, его расположение в фантоме и позиционирование каждого из используемых датчиков температуры;
- заполняют фантом гелем, тщательно перемешивают для гомогенизации, убеждаются в отсутствии пузырьков воздуха и изменения пространственного положения имплантата и датчиков;
- отключают вентилятор пациента, чтобы избежать дополнительного обдува фантома в процессе эксперимента. В случае, если вентилятор не может быть отключен, следует накрыть фантом плотной тканью для минимизации воздействия воздушного потока.
7.1.1.11 Импульсная последовательность
Импульсная последовательность должна быть выбрана таким образом, чтобы уровень передаваемой фантому энергии обеспечивал необходимый нагрев (см. 7.1.1.8). При этом УКП всего тела должен составлять приблизительно 2 Вт/кг или выше.
В протокол испытаний необходимо внести следующие параметры:
- рассчитанный системой УКП всего тела;
- локальный УКП;
- пиковый УКП;
- УКП части тела;
- угол наклона вектора намагниченности (Flip angle);
- число РЧ-импульсов за единицу времени;
- ширина полосы пропускания (bandwidth);
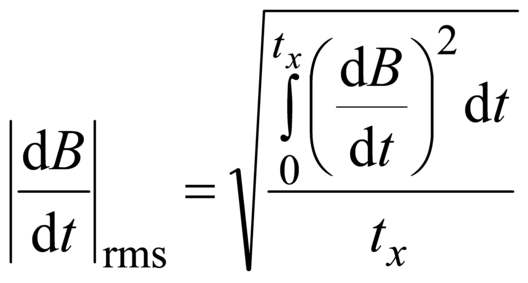
- среднеквадратичное значение ![]() ;
;
- общее время, в течение которого было приложено РЧ-поле;
- общая средняя мощность, поглощенная фантомом.
Примечание - В приложении Б представлены примеры параметров импульсных последовательностей, соответствующих данным требованиям. Последовательность с такими параметрами может быть использована на большинстве распространенных МР-тест-систем, однако допустимо применение других последовательностей.
7.1.1.12 Тепловое равновесие системы фантом - окружающая среда
Регистрация температуры раствора в фантоме должна начинаться не позднее чем за 2 мин до начала МР-исследования и продолжаться не менее 2 мин после его завершения; не менее чем в четырех точках. Изменение среднеквадратичного значения температуры за первые и последние 10 с регистрации до начала исследования не должны отличаться более чем на 0,2°С.
Регистрация температуры воздуха в помещении должна начинаться не позднее чем за 15 мин до начала исследования и продолжаться не менее 15 мин после его завершения. Показания при этом не должны изменяться более чем на 1°С за 1 ч.
7.1.1.13 Повторение
Необходимым условием воспроизводимости результатов эксперимента является точное повторение положения фантома и датчиков.
7.1.1.14 Локальный УКП и МР-исследование фантома без имплантата
Для определения количества поглощаемой фантомом РЧ-энергии необходимо провести МР-исследование фантома без имплантата с идентичными параметрами импульсной последовательности и регистрацией температуры в тех же четырех точках, что и в 7.1.1.12.
Локальный УКП, Вт, может быть рассчитан по формуле
![]() , (1)
, (1)
где - удельная теплоемкость материала фантома (
4150 Дж/(кг °С);
![]() - изменение температуры, °С;
- изменение температуры, °С;
![]() - изменение времени, с.
- изменение времени, с.
Записывают повышение температуры за 15 мин и рассчитывают ![]() , используя линейное приближение за 15 мин.
, используя линейное приближение за 15 мин.
7.1.1.15 Калориметрическое определение УКП всего тела для фантома с физиологическим раствором
Измерение УКП всего тела для фантома является важным параметром для маркировки ИМИ. Маркировка должна гарантировать, что пациенту имплантировано устройство, с которым допустимо безопасное проведение МР-исследования в нормальном режиме работы или в режиме контроля первого уровня.
Нагрев имплантата в фантоме при определенном значении УКП всего тела должен быть затем связан с нагревом имплантата in vivo для конкретного пациента.
Для данного теста фантом, применяемый при определении нагрева имплантата, должен быть заполнен физиологическим раствором с электропроводностью 0,47 См/м (2,5 г/л NaCl, растворенного в деионизированной воде), с дополнительной теплоизоляцией и устройством, позволяющим перемешать раствор без открытия крышки.
Теплопроводность изоляции должна быть менее 0,029 Вт/м·К, что соответствует проводимости экструдированного полистирола толщиной 25 мм и более.
Объем физиологического раствора - 25 л.
Примечание - Калориметрические и импульсные методы измерения энергии УКП для всего тела описаны в [11].
Данную процедуру необходимо выполнить один раз для каждого положения фантома в тестовой МР-тест-системе. Если для создания РЧ-поля используют МРТ, определение величины нагрева имплантата и УКП всего тела следует выполнять с одинаковыми параметрами импульсных последовательностей и одной и той же версией программного обеспечения томографа, что позволит гарантировать аналогичный уровень передаваемой РЧ-энергии.
Калориметрию для фантома выполняют следующим образом:
- убеждаются, что раствор находится в пределах ±0,5°С от температуры воздуха в процедурной;
- помещают фантом на стол пациента и перемешивают физиологический раствор;
- измеряют температуру раствора в центральной части фантома высокоточным термометром или температурным зондом (обеспечивающими измерения с погрешностью <0,05°С);
- накрывают фантом крышкой и теплоизолятором, чтобы избежать испарения и охлаждения раствора, т.к. это может привести к значительной ошибке;
- через узкую щель в теплоизоляции (которая находится на фантоме во время всего исследования) вставляют ручку для перемешивающего механизма, который перемещается взад и вперед, не задевая температурный датчик;
- для минимизации охлаждения от испарения на поверхность раствора может быть уложен слой вспененной теплоизоляции;
- помещают фантом в то же место в тестовой МР-тест-системе, которое фантом занимал во время теста с имплантатом и проводят МР-исследование;
- извлекают фантом из МР-тест-системы, перемешивают раствор, не открывая крышку;
- сразу после извлечения фантома из МР-тест-системы измеряют температуру раствора высокоточным термометром или температурным датчиком (обеспечивающими измерения с погрешностью <0,05°С);
- рассчитывают усредненную УКП всего тела, используя формулу (1) при 4150 Дж/кгс.
Примечание - Рекомендованные для введения при МР-исследовании параметры фантома: вес - 72 кг, рост - 166 см, возраст - 40 лет.
7.1.1.16 Протокол испытаний
В протокол испытаний по каждому имплантату должна быть включена следующая информация:
- описание изделия имплантата, включая фотографию с указанием масштаба на изображении;
- номер продукта для имплантации и/или другие идентификационные номера (например, серийный номер, номер партии и т.д.);
- материалы конструкции;
- фотография или чертеж геометрии имплантата, показывающие основные морфологические признаки и размеры;
- фотография или схема фантома, которые включают размеры фантома;
- фотография или диаграмма, показывающие размещение имплантата и датчиков температуры и расположение фантома в МР-тест-системе по отношению к изоцентру;
- для датчиков, не соприкасающихся с имплантатом, - расстояние от чувствительной части датчика до имплантата;
- для датчиков, которые находятся в контакте с имплантатом, - расположение чувствительной части датчика на имплантате;
- МР-изображения могут быть предоставлены в качестве дополнительной информации;
- если МР-тест-система представляет собой МР-сканер, указывают производителя, номер модели, версию программного обеспечения, тип передающей РЧ-катушки, а также напряженность статического магнитного поля и частоту МР-тест-системы;
- производитель, номер модели и соответствующая техническая информация о температурных датчиках, составе раствора в фантоме, держателе имплантата, корпусе фантома и любых других компонентах экспериментальной установки. Если используют отличный от рекомендованного в настоящем стандарте состав раствора, следует привести обоснование выбора состава;
- анализ, используемый для определения распределения электрического поля в фантоме;
- параметры импульсной последовательности и значение локального УКП в месте расположения имплантата. Если возможно, сообщают угол поворота намагниченности (flip angle) и ширину полосы пропускания РЧ-импульсов, а также количество РЧ-импульсов за единицу времени. Если доступно, указывают среднеквадратичное значение поля ![]() в микротеслах и среднее значение мощности в фантоме в ваттах, а также введенное значение веса пациента, выходную РЧ-мощность;
в микротеслах и среднее значение мощности в фантоме в ваттах, а также введенное значение веса пациента, выходную РЧ-мощность;
- масса гелеобразного солевого раствора в фантоме;
- совокупный, локальный и пиковый УКП всего тела, если данная информация отображается на консоли МР-сканера;
- для каждого температурного датчика - графики и таблицы температуры в зависимости от времени для случаев с имплантатом и без него. Включают измерения температуры до, во время и после приложения РЧ магнитного поля. Включают в протокол любую имеющуюся информацию о неопределенности измерений температуры;
- ![]() - разность между максимальной и начальной температурой перед запуском радиочастотного питания для каждого датчика температуры в течение всего периода измерения;
- разность между максимальной и начальной температурой перед запуском радиочастотного питания для каждого датчика температуры в течение всего периода измерения;
- локальный УКП, рассчитанный для каждого датчика;
- ![]() (изменение температуры, измеренное при установленном имплантате/изменение температуры без имплантата) в каждый момент времени для каждого датчика измерения температуры;
(изменение температуры, измеренное при установленном имплантате/изменение температуры без имплантата) в каждый момент времени для каждого датчика измерения температуры;
- теоретическое или эмпирическое обоснование размещения датчиков;
- температура в комнате сканирования в течение 15 мин до применения РЧ-импульсов и в течение 15 мин после завершения теста;
- среднее значение УКП всего тела по калориметрической оценке (усредненной по объему фантома) и, если измерения были выполнены в МР-тест-системе, указанное на консоли значение УКП всего тела;
- сообщают и обосновывают любые изменения в методе испытаний.
Примечание - Данные о температуре в этих измерениях могут подвергаться высокой степени экспериментальной ошибки. Следует сообщать о неопределенности, связанной с измерениями.
7.1.2 Нагрев неактивных имплантатов в градиентных магнитных полях
Оценку нагрева имплантата, вызванного воздействием градиентных полей, следует проводить в условиях испытаний, достаточных для представления всех воздействий градиентной системы, допускаемых условной маркировкой ИМИ.
Нагрев устройства также может зависеть от характеристик градиентной формы волны.
7.1.2.1 Определение пределов воздействия ![]()
Максимальные значения ![]() как функции от радиального удаления от изоцентра для нормального режима работы представлены в таблице 2. Выбор значения
как функции от радиального удаления от изоцентра для нормального режима работы представлены в таблице 2. Выбор значения ![]() для теста необходимо осуществлять с учетом соответствующей категории пациентов.
для теста необходимо осуществлять с учетом соответствующей категории пациентов.
Таблица 2 - Значения ![]() как функция радиального удаления ИМИ от изоцентра
как функция радиального удаления ИМИ от изоцентра
Радиальное удаление ИМИ от изоцентра, см |
| Радиальное удаление ИМИ от изоцентра, см |
|
5 | 27,1 | 20 | 42,0 |
10 | 29,8 | 25 | 54,1 |
15 | 34,4 | 30* | 73,3 |
* Радиальное положение 30 см применимо только для систем диаметром гентри 70 см. | |||
7.1.2.2 Определение продолжительности теста
Время воздействия градиентных полей на тестируемое ИМИ должно быть сопоставимо с воздействием на пациента во время МР-исследования. Длительность воздействия может быть выбрана исходя из максимального значения, указанного в паспорте МР-безопасного ИМИ, или - 30 мин.
7.1.2.3 Требования к испытаниям
Оценка нагрева устройства включает воздействие на ИМИ известным градиентным полем ![]() (задается среднеквадратичное значение и пространственная ориентация) и измерение температурного отклика. Испытания следует проводить в условиях с минимальным конвективным теплопереносом (например, гелеобразный раствор или теплоизолированный контейнер).
(задается среднеквадратичное значение и пространственная ориентация) и измерение температурного отклика. Испытания следует проводить в условиях с минимальным конвективным теплопереносом (например, гелеобразный раствор или теплоизолированный контейнер).
Предпочтительным является использование лабораторной катушки, усилителя и генератора сигнала, которые могут имитировать воздействие поля МРТ. Преимущество такой установки заключается в возможности генерировать произвольные последовательности импульсов, в том числе указанные в 7.1.2.7.
Применение МРТ для данного испытания допустимо, однако требует дополнительных действий по обеспечению контроля позиционирования ИМИ и параметров сканирования. Кроме того, не все аппараты позволяют генерировать сигнал формы 1 (см. 7.1.2.7).
Нет необходимости подвергать устройство воздействию пределов клинического воздействия (см. таблицу 2) во время данных испытаний, если приложенное воздействие обеспечивает нагрев, не менее чем в 10 раз превышающий точность измерений, и показана линейная зависимость от изменения градиентного поля [формула (2)].
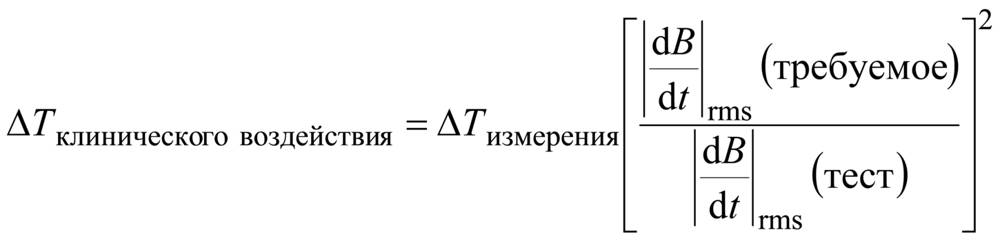 , (2)
, (2)
где ![]() - повышение температуры, необходимое для оценки и рассчитанное за время, усредненное по
- повышение температуры, необходимое для оценки и рассчитанное за время, усредненное по ![]() ; °С;
; °С;
![]() - повышение температуры, измеренное в результате испытания, °С;
- повышение температуры, измеренное в результате испытания, °С;
![]() - усредненное по времени
- усредненное по времени ![]() (Тл/с), необходимое для оценки;
(Тл/с), необходимое для оценки;
![]() - усредненное по времени
- усредненное по времени ![]() (Тл/с), использованное для теста.
(Тл/с), использованное для теста.
7.1.2.4 Фантом
Фантом представляет собой полый контейнер, заполненный гелеобразным раствором, описанным в 7.1.1.5.
Тестируемое ИМИ должно быть расположено в радиальном центре фантома. При этом ориентация фантома должна обеспечивать максимальное воздействие градиентных полей на ИМИ.
Примечание - Использование лабораторной катушки может накладывать дополнительные ограничения на габариты фантома и (как следствие) значимое изменение распределения температур раствора у стенок корпуса. В случае, если не удается обеспечить термостатирование раствора у стенок корпуса фантома, следует учитывать изменение температуры за счет теплообмена с окружающей средой в расчетах.
7.1.2.5 Исследование температуры для определения ориентации и точек локального нагрева
Нагрев ИМИ будет зависеть от ориентации устройства относительно вектора приложенного поля. Для имплантатов с большой проводящей поверхностью (или несколькими параллельными проводящими поверхностями) максимальное поглощение мощности будет происходить, когда вектор ![]() перпендикулярен к самой большой из этих плоскостей. Для ИМИ без таких поверхностей или ИМИ с внутренними компонентами, которые могут способствовать нагреву в других ориентациях, следует определять ориентацию относительно применяемого вектора
перпендикулярен к самой большой из этих плоскостей. Для ИМИ без таких поверхностей или ИМИ с внутренними компонентами, которые могут способствовать нагреву в других ориентациях, следует определять ориентацию относительно применяемого вектора ![]() , обеспечивающую максимальный нагрев.
, обеспечивающую максимальный нагрев.
Многокомпонентные ИМИ и ИМИ со сложной формой корпуса могут обладать точками локального нагрева, определение амплитуды изменения температуры которых следует выполнять в конфигурации, обеспечивающей максимальный нагрев.
7.1.2.6 Определение закона изменения поля
Переменное магнитное поле, действующее на ИМИ, следует описывать двумя способами. Форма 1 предполагает консервативный закон изменения поля, отражающий зависимость нагрева от частоты токов, индуцируемых на проводящих поверхностях. Однако, такой закон не соответствует изменению индукции поля во время МР-исследования. Поэтому была предложена форма 2, приближенная к практической. Она может быть использована в случае, если изготовитель ИМИ предоставляет параметры воспроизводимой в клинических условиях последовательности. В обоих случаях величину нагрева следует определять при ![]() по 7.1.2.1.
по 7.1.2.1.
Форма 1
Форму волны излучаемого поля ![]() определяют по формуле
определяют по формуле
 , (3)
, (3)
где ![]() - величина индукции изменяющегося во времени магнитного поля, Тл;
- величина индукции изменяющегося во времени магнитного поля, Тл;
![]() - среднеквадратичное значение изменяющегося во времени поля градиента (определено в 7.1.2.1), Тл/с;
- среднеквадратичное значение изменяющегося во времени поля градиента (определено в 7.1.2.1), Тл/с;
![]() - частота, установленная на 270 Гц;
- частота, установленная на 270 Гц;
- время, с.
Примечания
1 Форма 1 была определена при ![]() 35 мТл и
35 мТл и ![]() 42 Тл/с. Эти значения были получены на номинальной частоте 270 Гц. Синусоидальная волна используется для тестовой формы сигнала формы 1, чтобы ограничить спектральную мощность указанной частотой и уменьшить возможность накопления энергии градиентного поля при самоиндукции корпуса и компонентов ИМИ, а также, предотвратить рассеяние при нагреве вихревыми токами.
42 Тл/с. Эти значения были получены на номинальной частоте 270 Гц. Синусоидальная волна используется для тестовой формы сигнала формы 1, чтобы ограничить спектральную мощность указанной частотой и уменьшить возможность накопления энергии градиентного поля при самоиндукции корпуса и компонентов ИМИ, а также, предотвратить рассеяние при нагреве вихревыми токами.
2 Форма 1 применима только к одноосной лабораторной катушке, а не к клиническому МР-сканеру.
Форма 2
Так как применение формы 1 ограничено лабораторными условиями, допустимо использование МРТ и импульсной последовательности с такими значениями параметров, что значение ![]() соответствует заявленному. Определяющими факторами при этом являются закон изменения индукции магнитного поля и его спектральный состав. Репрезентативность данной процедуры в клинических условиях является обязательным требованием.
соответствует заявленному. Определяющими факторами при этом являются закон изменения индукции магнитного поля и его спектральный состав. Репрезентативность данной процедуры в клинических условиях является обязательным требованием.
Для определения клинически релевантной формы сигнала и контроля последовательности МР-импульсов допускается использовать трехосевую исследовательскую катушку и методы по ГОСТ Р МЭК 60601-2-33-2013 (пункт 201.12.4.105.2.2, метод b). Также, если это возможно, допустимо использование прямого контроля выходов усилителя градиента для определения формы сигнала с использованием порта выборки усилителя градиента.
Примечание - Вне зависимости от выбранного метода задания клинически релевантного переменного поля важно не допустить оказания отрицательного влияния системы на результаты исследования. Одним из таких факторов может быть ограниченная полоса пропускания системы.
7.1.2.7 Определение характеристик применяемого ![]()
Помещают приемную катушку в область однородного поля. ИМИ должно быть ориентировано так, чтобы основные проводящие плоскости были параллельны z-оси томографа.
Измеряют нормальные к основным проводящим плоскостям ИМИ составляющие вектора ![]() . Записывают примененную форму
. Записывают примененную форму ![]() , использованную для испытаний на нагрев, в месте минимального приложения энергии переменного поля. Форма сигнала должна быть дискретизирована с частотой, достаточной для захвата деталей формы сигнала в
, использованную для испытаний на нагрев, в месте минимального приложения энергии переменного поля. Форма сигнала должна быть дискретизирована с частотой, достаточной для захвата деталей формы сигнала в ![]() и предотвращения наложения сигнала. Записанный сигнал должен иметь достаточную длину, чтобы можно было определить средние значения. Если
и предотвращения наложения сигнала. Записанный сигнал должен иметь достаточную длину, чтобы можно было определить средние значения. Если ![]() не записывается напрямую, запись воздействия поля градиента должна быть такой, чтобы ее можно было обработать для вычисления среднего квадрата или
не записывается напрямую, запись воздействия поля градиента должна быть такой, чтобы ее можно было обработать для вычисления среднего квадрата или ![]() . Измерение
. Измерение ![]() можно выполнять независимо от теста на нагрев, при условии, что применяемые формы сигналов будут идентичными для каждого теста.
можно выполнять независимо от теста на нагрев, при условии, что применяемые формы сигналов будут идентичными для каждого теста.
При использовании клинического МР-сканера векторное направление применяемого ![]() может изменяться со временем. Чтобы предотвратить недооценку нагрева ИМИ, при определении приложенного
может изменяться со временем. Чтобы предотвратить недооценку нагрева ИМИ, при определении приложенного ![]() должен быть использован только компонент
должен быть использован только компонент ![]() , нормальный к плоской проводящей поверхности ИМИ.
, нормальный к плоской проводящей поверхности ИМИ.
7.1.2.8 Лабораторное испытание с использованием смоделированного градиентного поля МР
Нагрев ИМИ в случае лабораторного исследования измеряют с использованием следующей процедуры:
Шаг 1. Помещают устройство в гелевый фантом или другой подходящий контейнер с температурными датчиками, прикрепленными, как определено в 7.1.1, и помещают фантом в лабораторную катушку, которая воздействует изменяющимся во времени магнитным полем.
Шаг 2. Значение ![]() определяют в соответствии с 7.1.2.1 для выбранной формы волны (формы 1 или 2), как указано в 7.1.2.6 и 7.1.2.7. Если лабораторная система не способна воспроизводить указанные
определяют в соответствии с 7.1.2.1 для выбранной формы волны (формы 1 или 2), как указано в 7.1.2.6 и 7.1.2.7. Если лабораторная система не способна воспроизводить указанные ![]() с соответствующей формой волны, исследование можно проводить при более низком значении
с соответствующей формой волны, исследование можно проводить при более низком значении ![]() , а затем масштабировать до указанного
, а затем масштабировать до указанного ![]() . Действующее значение определяют по формуле, приведенной в 7.1.2.З.
. Действующее значение определяют по формуле, приведенной в 7.1.2.З.
Шаг 3. Измеряют нагрев устройства температурными датчиками за время исследования, определенное в 7.1.2.2.
7.1.2.9 Испытания в МР-сканере
Алгоритм проведения испытаний в лабораторных условиях может быть адаптирован к применению в МРТ. В случае, когда используется клиническая МР-тест-система, потребуется дополнительное приспособление для точного позиционирования фантома относительно изоцентра магнита. Не менее важны выбор импульсной последовательности, ее параметров и контроль соблюдения условий. В остальном процедура повторяет описанную в 7.1.2.8.
Градиентный выход, используемый в тесте, должен соответствовать предполагаемой маркировке ИМИ с учетом вариабельности параметров различных аппаратов. Особое внимание следует уделить значению ![]() и параметрам импульсных последовательностей, так как нагрев имплантата определяется значением
и параметрам импульсных последовательностей, так как нагрев имплантата определяется значением ![]() . Кроме того, в случае использования МРТ не всегда целесообразно применение значений
. Кроме того, в случае использования МРТ не всегда целесообразно применение значений ![]() , указанных в таблице 2.
, указанных в таблице 2.
Испытания на градиентный нагрев минимум должны быть проведены с использованием информации протокола интенсивной градиентной совместимости, предоставленной производителями МР-сканеров (см. ГОСТ Р МЭК 60601-2-33-2013, пункт 201.7.9.3.101).
7.1.2.10 Анализ теста градиентного нагрева
Из определенной с использованием приемной катушки формы сигнала ![]() определяют
определяют ![]() , ортогональное плоскости приемной катушки (и поверхности ИМИ), по следующей формуле:
, ортогональное плоскости приемной катушки (и поверхности ИМИ), по следующей формуле:
 , (4)
, (4)
где ![]() - среднеквадратичное значение
- среднеквадратичное значение ![]() , Тл/с;
, Тл/с;
![]() - подходящее время усреднения для последовательности импульсов
- подходящее время усреднения для последовательности импульсов ![]() , с.
, с.
Результат нагрева может быть масштабирован в соответствии с формулой (2).
7.1.3 Поступательная сила, действующая на ИМИ
Данная процедура направлена на определение силы, действующей на ИМИ и возникающей в результате воздействия постоянного магнитного поля МРТ. В частности, проводится сравнение величины этой силы с гравитационным притяжением, принимая за априорную информацию о том, что при этом уровень риска не возрастает по сравнению с ежедневным. Данный метод описан в [12].
7.1.3.1 Оборудование
Испытания следует проводить в МР-тест-системах закрытого типа с горизонтально ориентированным постоянным магнитным полем.
Испытательный стенд представляет собой жесткую немагнитную конструкцию, способную удерживать ИМИ в заданном положении, и оснащен транспортиром с ценой деления не более 1°. Начало шкалы (0°) совпадает с вертикалью.
ИМИ соединено со стендом нитью, закрепленной в начале шкалы транспортира. Длина нити должна быть достаточной для свободного подвеса ИМИ (точка крепления нити к ИМИ при этом не регламентируется). Движение нити не должно быть ограничено опорой стенда или транспортиром.
7.1.3.2 Объект испытаний
Данная методика применима к имплантатам, которые могут быть подвешены на нити. При этом масса нити должна составлять не более 1% массы ИМИ.
Примечания
1 Для ИМИ с низкой массой допустимо одновременное испытание нескольких единиц одновременно.
2 В случае, когда требуется использование дополнительных приспособлений фиксации (например, для крепления подвижных или гибких частей составного ИМИ), оценка возникающей в магнитном поле силы по углу отклонения должна учитывать их массу.
3 Для обеспечения определения наихудшего случая элементы многокомпонентных ИМИ следует подвергать испытаниям по отдельности и во всех возможных конфигурациях. То же касается и режимов работы АИМИ.
Испытуемое ИМИ должно быть полностью подготовлено к применению по назначению (вплоть до стерилизации) без каких-либо дополнительных модификаций.
7.1.3.3 Краткое описание метода
ИМИ подвешивают в гентри томографа на высоте, совпадающей с главной осью магнита (). Для обеспечения достаточной чувствительности метода расположение выбирают таким образом, чтобы пространственный градиент индукции магнитного поля (
![]() ) отличался от максимального не более чем на 20%. При этом измеряют угол отклонения нити от вертикали, а индуцированную магнитным полем силу сравнивают с силой тяжести (если угол отклонения превышает 45°, сила втягивания, действующая на ИМИ, больше силы тяжести).
) отличался от максимального не более чем на 20%. При этом измеряют угол отклонения нити от вертикали, а индуцированную магнитным полем силу сравнивают с силой тяжести (если угол отклонения превышает 45°, сила втягивания, действующая на ИМИ, больше силы тяжести).
Примечание - Выбор положения имплантата по значению ![]() имеет особое значение при определении параметров МР-тест-системы, обеспечивающих безопасное проведение исследования с выбранным ИМИ.
имеет особое значение при определении параметров МР-тест-системы, обеспечивающих безопасное проведение исследования с выбранным ИМИ.
7.1.3.4 Методика испытаний
На рисунке 4 представлена схема испытательного стенда, установленного на столе пациента МРТ.
|
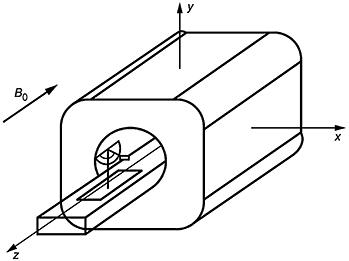
Рисунок 4 - Испытательный стенд для оценки действующей на ИМИ силы в постоянном поле МРТ
Испытуемое ИМИ располагается на подвесе, закрепленном в точке начала отсчета шкалы транспортира таким образом, чтобы центр масс ИМИ (в отклоненном под действием поля положении) находился в торцевой плоскости гентри и совпадал с главной осью магнита. Такое позиционирование обеспечивает максимальный градиент ![]() и соответственно максимальную действующую силу
и соответственно максимальную действующую силу (см. рисунок 5).
Для обеспечения высокой чувствительности метода градиент напряженности магнитного поля ![]() в точке расположения ИМИ не должен отличаться от максимального более чем на 20%.
в точке расположения ИМИ не должен отличаться от максимального более чем на 20%.
Примечание - Для парамагнитных материалов (например, нитинола, сплавов CoCrMo, титана и его сплавов, нержавеющей стали 316L) и для ненасыщенных ферромагнитных материалов магнитно-индуцированная сила отклонения ![]() пропорциональна произведению статического магнитного поля и пространственного градиента. Для ИМИ, изготовленных из этих материалов, место максимального отклонения находится в точке, максимума
пропорциональна произведению статического магнитного поля и пространственного градиента. Для ИМИ, изготовленных из этих материалов, место максимального отклонения находится в точке, максимума ![]() . Для насыщенных ферромагнитных материалов максимальное отклонение соответствует положению максимума
. Для насыщенных ферромагнитных материалов максимальное отклонение соответствует положению максимума ![]() .
.
|
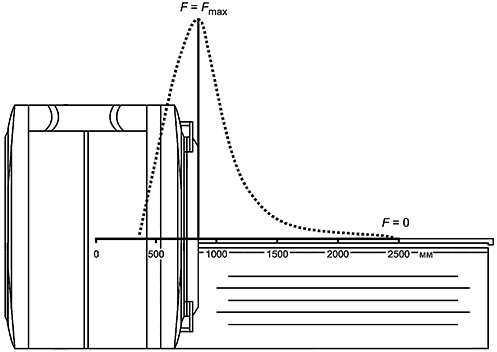
Рисунок 5 - Амплитуда силы, действующей на ИМИ в зависимости от расстояния до изоцентра магнита
В протокол испытаний включают следующие данные:
- координаты расположения ИМИ (,
,
) после его отклонения от вертикали в случае, если оно имело место;
- значения напряженности ![]() и пространственного градиента
и пространственного градиента ![]() постоянного поля в точке расположения ИМИ;
постоянного поля в точке расположения ИМИ;
- угол отклонения ИМИ от вертикали ![]() с точностью до 1° (см. рисунок 6).
с точностью до 1° (см. рисунок 6).
|
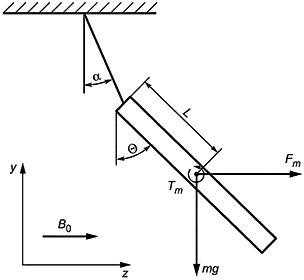
Рисунок 6 - Схема расположения ИМИ в постоянном поле ![]()
Испытания следует повторить не менее трех раз.
7.1.3.5 Обработка результатов
Значение возникающей в ИМИ силы ![]() , Н, может быть определено по формуле
, Н, может быть определено по формуле
![]() , (5)
, (5)
где ![]() - масса ИМИ, кг;
- масса ИМИ, кг;
![]() - ускорение свободного падения, м/с
- ускорение свободного падения, м/с;
![]() - среднее значение измеренных углов
- среднее значение измеренных углов ![]() , рад.
, рад.
7.1.3.6 Протокол испытаний
Для каждого испытанного образца должен быть составлен протокол, включающий следующую информацию:
- описание ИМИ, включающее чертежи или фотографии с указанием размеров;
- схема расположения или фотография, демонстрирующие положение ИМИ в процессе исследования;
- идентификационный номер ИМИ (например, номер партии, идентификатор типа, серийный номер или дата производства);
- материалы ИМИ или каждого из элементов многокомпонентного ИМИ;
- число испытанных ИМИ;
- координаты расположения центра масс ИМИ во время испытания (в правой системе координат с центром, совпадающим с изоцентром магнита) и схему взаимного расположения МРТ и системы координат;
- значения напряженности ![]() и пространственного градиента
и пространственного градиента ![]() постоянного поля в точке расположения ИМИ;
постоянного поля в точке расположения ИМИ;
- угол отклонения ИМИ от вертикали ![]() для каждого повторения теста;
для каждого повторения теста;
- ![]() - среднее значение измеренных углов
- среднее значение измеренных углов ![]() , рассчитанное по абсолютным значениям угла отклонения;
, рассчитанное по абсолютным значениям угла отклонения;
- масса ИМИ;
- масса нити, используемой для подвеса;
- масса дополнительных приспособлений фиксации;
- для ИМИ, показавших отклонение на угол ![]() 45°, - значение силы
45°, - значение силы ![]() , рассчитанное по формуле (5);
, рассчитанное по формуле (5);
- расчетное значение максимально допустимого значения ![]() , при определении.
, при определении.
7.1.4 Крутящий момент, действующий на ИМИ в постоянном магнитном поле
Данный тест направлен на определение постоянного крутящего момента, возникающего при воздействии на магнитный ИМИ постоянного магнитного поля ![]() . Его действие направлено на поворот продольной оси ИМИ по направлению линий индукции магнитного поля. Данный метод описан в [13]. В настоящем пункте не рассматривается динамический крутящий момент, вызванный взаимодействием поверхностных токов с постоянным полем
. Его действие направлено на поворот продольной оси ИМИ по направлению линий индукции магнитного поля. Данный метод описан в [13]. В настоящем пункте не рассматривается динамический крутящий момент, вызванный взаимодействием поверхностных токов с постоянным полем ![]() , а также, взаимодействием проводников с током и поля
, а также, взаимодействием проводников с током и поля ![]() .
.
7.1.4.1 Оборудование
Испытательный стенд для измерения крутящего момента должен иметь чувствительность не хуже, чем 0,1 максимального крутящего момента, возникающего под действием гравитации и равного максимальному линейному размеру ИМИ, умноженному на его вес.
Испытательный стенд, представленный на рисунке 7, изготовлен из неферромагнитных материалов и состоит из опорного кронштейна 1, оснащенного торсионной пружиной 2, удерживающей платформы 3 с транспортиром с ценой деления не более 1°. Для определения угла поворота платформы на стенде установлена угловая метка 4. Поворот осуществляется при помощи ручки 5. ИМИ 6 размещается на удерживающей платформе.
Примечание - Жесткость торсионной пружины должна быть выбрана такой, чтобы максимальный угол поворота платформы не превышал 25°.
7.1.4.2 Объект испытаний
Испытуемое ИМИ должно быть полностью подготовлено к применению по назначению (вплоть до стерилизации) без каких-либо дополнительных модификаций.
7.1.4.3 Краткое описание метода
Возникающий при расположении ИМИ в поле ![]() крутящий момент определяют с использованием крутильного маятника. Имплантат закрепляют в держателе, подвешенном на торсионной пружине. Испытательный стенд помещают в изоцентре магнита. Крутящий момент определяют как функцию угла поворота ИМИ и сравнивают с крутящим моментом, вызванным воздействием гравитационного поля.
крутящий момент определяют с использованием крутильного маятника. Имплантат закрепляют в держателе, подвешенном на торсионной пружине. Испытательный стенд помещают в изоцентре магнита. Крутящий момент определяют как функцию угла поворота ИМИ и сравнивают с крутящим моментом, вызванным воздействием гравитационного поля.
7.1.4.4 Методика испытаний
Испытательный стенд с размещенным на удерживающей платформе ИМИ устанавливают в изоцентре магнита так, чтобы одна из главных осей ИМИ совпадала с вертикалью.
|
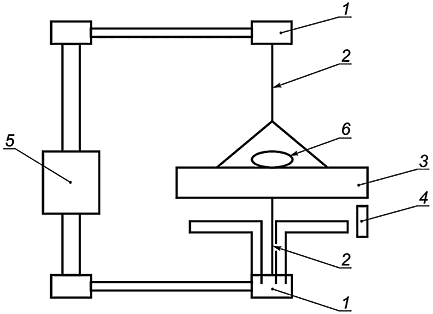
1 - опорный кронштейн; 2 - торсионная пружина; 3 - удерживающая платформа с транспортиром с ценой деления не более 1°; 4 - угловая метка; 5 - ручка; 6 - ИМИ
Рисунок 7 - Схема испытательного стенда для определения крутящего момента, возникающего при расположении ИМИ в постоянном поле ![]()
Поворачивают стенд ручкой и измеряют отклонение платформы относительно основания с шагом 10° в диапазоне от 0° до 360°. Обращают внимание, что при изменении знака производной крутящего момента переход ИМИ в следующее положение равновесия будет сопровождаться резким отклонением. Для определения максимального крутящего момента следует зафиксировать именно это отклонение.
Измерение следует проводить дважды для каждого из положений ИМИ, при котором одна из его главных осей совпадает с вертикалью.
Примечание - Если возможно, следует провести численную оценку крутящего момента.
7.1.4.5 Расчет
Крутящий момент , Н·м, для каждого измерения определяют по формуле
![]() , (6)
, (6)
где ![]() - коэффициент жесткости пружины, Н·м/рад;
- коэффициент жесткости пружины, Н·м/рад;
![]() - угол отклонения удерживающей платформы от положения равновесия, относительно неподвижного основания, рад.
- угол отклонения удерживающей платформы от положения равновесия, относительно неподвижного основания, рад.
7.1.4.6 Протокол испытаний
Для каждого испытанного образца должен быть составлен протокол, включающий следующую информацию:
- описание ИМИ, включающее чертежи или фотографии с указанием размеров;
- схема расположения или фотография, демонстрирующая три положения ИМИ в процессе исследования;
- идентификационный номер ИМИ (например, номер партии, идентификатор типа, серийный номер или дата производства);
- материалы ИМИ или каждого из элементов многокомпонентного ИМИ;
- число испытанных ИМИ;
- масса ИМИ;
- тип используемой МР-тест-системы и значение индукции постоянного магнитного поля ![]() ;
;
- координаты расположения центра масс ИМИ во время испытания (в правой системе координат с центром, совпадающим с изоцентром магнита) и схема взаимного расположения МРТ и системы координат;
- фотография или схема испытательного стенда с указанием коэффициента жесткости пружины;
- три графика зависимости крутящего момента (Н·м) от углового положения ИМИ относительно линий индукции поля ![]() - по одному для каждой ориентации ИМИ в пространстве;
- по одному для каждой ориентации ИМИ в пространстве;
- расчет значений крутящего момента для проводника с током, если проводился;
- описание или фотография изменений, внесенных в ИМИ перед проведением теста, а также обоснование внесения изменений.
7.2 Активные ИМИ
7.2.1 Нагрев АИМИ в РЧ-полях
Воздействие РЧ-полей во время МР-исследования может привести к нагреву АИМИ или его частей, нарушению функционирования и повреждению окружающих тканей организма.
Для оценки величины нагрева АИМИ может быть использована соответствующая процедура для неактивных ИМИ (см. 7.1.1) с той разницей, что при определении конфигурации, обеспечивающей максимальный нагрев, необходимо учитывать все режимы работы имплантата. При этом снижение числа экспериментальных исследований может быть в значительной степени обеспечено методами математического и физического моделирований.
7.2.2 Нагрев АИМИ в градиентных полях
Для АИМИ с удлиненными отведениями (например, отведениями сердца или отведениями нейромодуляции), которые не содержат плоских проводящих поверхностей, не существует механизма для индуцированного МРТ нагрева вихревыми токами. Эти отведения не требуют оценки индуцированного МРТ нагрева.
В остальных случаях нагрев АИМИ, вызванный воздействием градиентных магнитных полей, определяется аналогично неактивным ИМИ (см. 7.1.1).
7.2.3 Вибрация, вызванная воздействием градиентных полей
Градиенты импульсного магнитного поля от МР-сканера индуцируют вихревые токи на проводящих поверхностях АИМИ. Эти вихревые токи создают изменяющийся во времени магнитный момент, который взаимодействует со статическим магнитным полем ![]() , вызывая вибрацию проводящих поверхностей и следовательно устройства.
, вызывая вибрацию проводящих поверхностей и следовательно устройства.
МР-индуцированная вибрация отличается от типичной для АИМИ вибрации (характерной для транспортирования или активной деятельности пациента), когда приложенные силы и крутящие моменты являются внешними по отношению к устройству. Кроме того, МР-индуцированная вибрация возникает на более высоких частотах.
Данный тест направлен на оценку уровня вибрации имплантата, возникающей в МРТ. Результаты могут быть использованы для определения допустимых условий проведения МР-исследования, не нарушающих работоспособность, функционирование АИМИ, а также, не создающих опасности для жизни и здоровья пациента в результате воздействия на окружающие имплантат ткани.
7.2.3.1 Оборудование
Для проведения испытаний может быть использована клиническая МР-тест-система или вибростенд. При этом в первом случае обеспечивается соответствие условий реальным.
Для измерения уровня вибрации следует применять датчики (смещения, скорости или ускорения) с минимальной шириной полосы пропускания от 20 Гц до 3 кГц. Могут быть использованы средства бесконтактной фотометрии (лазерная доплеровская виброметрия, интерферометрия, корреляция цифровых изображений) и некоторые акселерометры.
7.2.3.2 Объект испытаний
Испытуемое АИМИ должно быть полностью подготовлено к применению по назначению (вплоть до стерилизации) без каких-либо дополнительных модификаций.
Примечание - Для АИМИ с удлиненными отведениями (например, отведениями сердца или отведениями нейромодуляции), которые не содержат плоских проводящих поверхностей, не существует механизма возникновения вибрации, вызванной воздействием МР-среды. В этом случае данная процедура испытаний необязательна.
7.2.3.3 Условия проведения испытаний
При использовании МР-сканера, векторное произведение градиентного поля ![]() и
и ![]() , которому подвергается АИМИ, должно быть больше или равно максимальному значению, разрешенному маркировкой изготовителя АИМИ.
, которому подвергается АИМИ, должно быть больше или равно максимальному значению, разрешенному маркировкой изготовителя АИМИ.
При проведении теста на МР-сканере рекомендуется использовать такие импульсные последовательности, как Echo Planar Imaging (EPI). При этом следует определить при помощи измерительной катушки частоту, амплитуду и количество генерируемых импульсов. Кроме того, может быть использована трапециевидная форма градиентного импульса (см. рисунок 8).
|
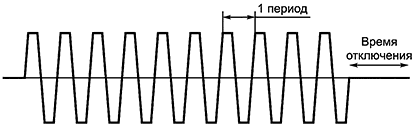
Рисунок 8 - Пример трапециевидной формы градиентного сигнала
Для импульсных последовательностей, использующих трапециевидную форму градиента, характерна частота возбуждения от 300 до 1150 Гц. Она должна изменяться с шагом до 300 Гц, при этом резонансные частоты, которые могут привести к нарушению работы МРТ, следует исключить.
Режим работы вибростенда должен быть определен так, чтобы частота и амплитуда вибраций соответствовали таковым при тесте на МР-сканере. Однако, допустимо проведение испытаний при меньших значениях ![]() и
и ![]() с последующим масштабированием.
с последующим масштабированием.
Примечание - Для АИМИ с маркировкой Fixed Parameter Option: B (FPO:B) значение ![]() должно составлять 100 Т/с. В противном случае следует использовать значение
должно составлять 100 Т/с. В противном случае следует использовать значение ![]() или
или ![]() . Значение
. Значение ![]() должно соответствовать ортогональной проекции на основную проводящую плоскость имплантата.
должно соответствовать ортогональной проекции на основную проводящую плоскость имплантата.
Испытания можно проводить при двух значениях температуры воздуха: при комнатной температуре и при температуре тела. В случае, если известно, что параметры материалов АИМИ не изменятся при изменении температуры в диапазоне 18°С-37°С, допустимо проведение испытания при комнатной температуре. В другом случае температуру окружающей среды следует поддерживать на уровне (37±5)°С.
В таблице 3 показана продолжительность теста, представляющая совокупное время сканирования за время жизни типичного АИМИ для данного процентиля популяции пациентов. Это - общая продолжительность всего теста, включая все частоты, которые будут проверены. Изготовитель может выбрать подходящую продолжительность теста на основе профиля риска АИМИ. Длительности теста основаны на 50%-ном рабочем цикле (использование 100%-ного рабочего цикла во время теста сокращает продолжительность теста вдвое).
Таблица 3 - Продолжительность теста
Процент заполнения, % | Продолжительность теста, ч |
99,2 | 2,5 |
99,9 | 4,5 |
99,99 | 7,5 |
Примечание - Время проведения теста может быть разбито на необходимое количество интервалов для обеспечения охлаждения системы. При этом конфигурация имплантата и датчиков не должна быть изменена. | |
Фиксация АИМИ для проведения испытаний должна обеспечивать свободное движение в диапазоне не менее 0,5 мм. Для этого может быть использован полимерный баллистический гель, пена с закрытыми порами, двухсторонний скотч и др.
7.2.3.4 Методика испытаний в МР-сканере
Располагают АИМИ на столе пациента так, чтобы основные проводящие плоскости были параллельны оси сканера . Должен быть измерен вектор
![]() , ортогональный к основным проводящим плоскостям АИМИ. Если каждый из двух габаритных размеров наибольшей проводящей плоскости не менее чем в два раза превышает третий габаритный размер имплантата, испытания допускается проводить только в одном положении. Так, в случае, когда при проведении МР-исследования пациенту имплантат будет располагаться параллельно столу томографа, в данном тесте его следует размещать перпендикулярно к градиентной
, ортогональный к основным проводящим плоскостям АИМИ. Если каждый из двух габаритных размеров наибольшей проводящей плоскости не менее чем в два раза превышает третий габаритный размер имплантата, испытания допускается проводить только в одном положении. Так, в случае, когда при проведении МР-исследования пациенту имплантат будет располагаться параллельно столу томографа, в данном тесте его следует размещать перпендикулярно к градиентной -катушке (
![]() ), как показано на рисунке 9.
), как показано на рисунке 9.
|
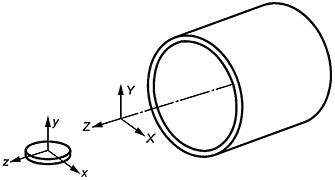
Рисунок 9 - Ориентация АИМИ в МР-сканере
Примечание - Следует оценить необходимость проведения испытаний в нескольких ориентациях вокруг оси , чтобы проверить колебания внутренних компонентов. Если оценка отрицательная, требуется только одна ориентация. Если в результате оценки будет установлено, что требуется проведение дополнительных испытаний, устройство должно быть испытано дважды с разницей в 90° относительно оси
.
МР-исследование проводят, используя импульсную последовательность, удовлетворяющую условиям 7.2.3.3.
7.2.3.5 Методика испытаний на вибростенде
При проведении испытаний на вибростенде АИМИ должно быть подвергнуто вибрации случайного профиля диапазоном частот от 20 до 3000 Гц, а также, вибрации профиля, соответствующего таковому при проведении МРТ. Амплитуда вибраций при этом может быть снижена.
7.2.3.6 Протокол испытаний
Для каждого испытанного образца должен быть составлен протокол, включающий следующую информацию:
- описание ИМИ, включающее чертежи или фотографии с указанием размеров;
- схема расположения или фотография, демонстрирующая три положения ИМИ в процессе исследования;
- идентификационный номер ИМИ (например, номер партии, идентификатор типа, серийный номер или дата производства);
- материалы ИМИ или каждого из элементов многокомпонентного ИМИ;
- число испытанных ИМИ;
- тип используемой МР-тест-системы и значение индукции постоянного магнитного поля ![]() ;
;
- параметры градиентных полей, заданные на консоли управления МР-тест-системы;
- измеренные с использованием исследовательской катушки параметры градиентных полей;
- фотография или схема испытательного вибростенда в случае, если исследование проводилось на нем;
- заданный профиль вибраций;
- показания измерительных датчиков;
- описание или фотография изменений, внесенных в ИМИ перед проведением теста, а также обоснование внесения изменений;
- описание или фотография изменений, произошедших во время или после воздействия;
- заключение о работоспособности АИМИ при заданном уровне вибраций.
7.2.4 Поступательная сила, действующая на АИМИ
Сила, создаваемая статическим магнитным полем (![]() ), может вызвать нежелательное движение устройства, содержащего магнитные материалы. АИМИ обычно содержат парамагнитные, диамагнитные и ферромагнитные материалы. Для парамагнитного, диамагнитного или ферромагнитного материала ниже насыщения местоположение максимальной силы смещения находится в точке, где произведение значений магнитного поля (
), может вызвать нежелательное движение устройства, содержащего магнитные материалы. АИМИ обычно содержат парамагнитные, диамагнитные и ферромагнитные материалы. Для парамагнитного, диамагнитного или ферромагнитного материала ниже насыщения местоположение максимальной силы смещения находится в точке, где произведение значений магнитного поля (![]() ) и пространственного градиента магнитного поля (
) и пространственного градиента магнитного поля (![]() ) максимальное. То же самое верно для парамагнитного материала выше насыщения. Для ферромагнитного материала выше точки магнитного насыщения максимальная сила смещения будет возникать в месте, где
) максимальное. То же самое верно для парамагнитного материала выше насыщения. Для ферромагнитного материала выше точки магнитного насыщения максимальная сила смещения будет возникать в месте, где ![]() является максимумом. Эти места находятся за центральной осью отверстия МР-сканера.
является максимумом. Эти места находятся за центральной осью отверстия МР-сканера.
Экспериментальная методика идентична соответствующей методике для неактивных ИМИ (см. 7.1.1).
7.2.5 Вращающий момент, действующий на АИМИ
Магнитно-индуцированный крутящий момент, создаваемый статическим магнитным полем (![]() ), может вызвать нежелательное движение устройства, содержащего магнитные материалы. Магнитно-индуцированный крутящий момент является функцией
), может вызвать нежелательное движение устройства, содержащего магнитные материалы. Магнитно-индуцированный крутящий момент является функцией ![]() и должен измеряться в месте, где статическое магнитное поле является однородным (например, изоцентр МР-сканера).
и должен измеряться в месте, где статическое магнитное поле является однородным (например, изоцентр МР-сканера).
Экспериментальная методика идентична соответствующей методике для неактивных ИМИ (см. 7.1.2), за исключением следующего: для АИМИ, по проводам которых при функционировании течет ток, испытание следует проводить во включенном состоянии.
7.2.6 Одновременное воздействие постоянных и переменных полей МРТ на АИМИ
Тест комбинированных полей устанавливает оценку in vitro функционирования АИМИ при одновременном воздействии статического, градиентного и радиочастотного магнитных полей.
В отличие от максимальных воздействий, требуемых в отдельных тестах, тест комбинированных полей подвергает АИМИ характерным для всех трех магнитных полей МРТ уровням и законам изменения одновременно.
Тест комбинированных полей проводится с использованием АИМИ, расположенного в фантоме, имитирующем ткань, и помещенного в МР-сканер. АИМИ подвергается сканированию с применением различных импульсных последовательностей в разных положениях относительно изоцентра МР-сканера.
7.2.6.1 Оборудование
Исследование следует проводить на клиническом МР-сканере с индукцией постоянного магнитного поля 1,5 Тл.
Тестируемое АИМИ должно быть помещено в фантом с гелем (см. 7.1.1).
Примечание - Если конкретное АИМИ предполагает расположение в анатомических областях, не представленных гелевым фантомом (например, рука или нога), допустима разработка и применение более репрезентативного фантома.
При необходимости мониторинга состояния АИМИ во время исследования используемые технические средства должны соответствовать следующим требованиям:
- система мониторинга должна быть МР-совместимой;
- система мониторинга должна обеспечивать непрерывный контроль активности АИМИ в ходе МР-исследования;
- система мониторинга не должна нарушать деятельности АИМИ до такой степени, которая повлияет на качественную оценку его состояния;
- система мониторинга не должна быть подвержена воздействию полей МРТ;
- система мониторинга не должна стать причиной индуцирования случайных полей в АИМИ.
7.2.6.2 Объект испытаний
Испытуемое АИМИ должно быть полностью подготовлено к применению по назначению (вплоть до стерилизации) без каких-либо дополнительных модификаций.
7.2.6.3 Краткое описание метода
Для оценки одновременного влияния всех типов магнитных полей МР-тест-системы на АИМИ необходимо поместить его в фантом, имитирующий проводимость и диэлектрическую проницаемость тканей организма, и провести рутинное МР-исследование области фантома, соответствующей предполагаемой анатомической зоне имплантации. Оценку состояния тестируемого АИМИ следует проводить непрерывно в течение 30 мин после исследования, а затем периодически в течение 14 дней после теста - комплексный контроль повреждений и неисправностей.
7.2.6.4 Методика испытаний
Для предотвращения влияния на радиочастотную поляризацию АИМИ следует располагать в фантоме так, чтобы поверхности с максимальными габаритами располагались в корональной плоскости в центре слоя геля. Также должны быть учтены рекомендации настоящего раздела по определению положения максимального воздействия РЧ- и градиентных полей и необходимости проведения исследования в нескольких конфигурациях.
Фантом с гелем и размещенным в нем АИМИ следует установить на столе пациента. Позиционирование фантома определяется по целевой анатомической зоне (см. приложение В).
Для каждой выбранной конфигурации АИМИ следует провести рутинное МР-исследование, применяемое в клинической практике, или исследование по рекомендациям изготовителя имплантата.
7.2.6.5 Протокол испытаний
Для каждого испытанного АИМИ и каждой конфигурации должен быть составлен протокол, включающий следующую информацию:
- описание ИМИ, включающее чертежи или фотографии с указанием размеров;
- схема расположения или фотография, демонстрирующая положение ИМИ в фантоме и фантома в томографе;
- идентификационный номер ИМИ (например, номер партии, идентификатор типа, серийный номер или дата производства);
- материалы ИМИ или каждого из элементов многокомпонентного ИМИ;
- число испытанных ИМИ;
- тип используемой МР-тест-системы и значение индукции постоянного магнитного поля ![]() ;
;
- параметры применяемых импульсных последовательностей;
- описание, схема и характеристики используемой системы мониторинга состояния АИМИ;
- показания измерительных датчиков;
- описание или фотография изменений, внесенных в ИМИ перед проведением теста, а также, обоснование внесения изменений;
- описание или фотография изменений, произошедших во время или после воздействия;
- заключение о работоспособности АИМИ при заданном уровне воздействий.
Приложение А
(справочное)
Факторы риска
Во время МР-исследования на пациента действуют постоянное (![]() ), радиочастотные (
), радиочастотные (![]() ) и градиентные (
) и градиентные (![]() ) магнитные поля. Наличие ИМИ в теле пациента приводит к возникновению опасности для жизни и здоровья, вызванной появлением следующих факторов риска:
) магнитные поля. Наличие ИМИ в теле пациента приводит к возникновению опасности для жизни и здоровья, вызванной появлением следующих факторов риска:
- поступательная сила, действующая на ИМИ;
- крутящий момент, действующий на ИМИ;
- нагрев;
- нарушение функционирования или выход из строя АИМИ;
- прочие риски (см. [2]).
А.1 Поступательная сила, действующая на ИМИ
Поступательная сила возникает при попадании ферромагнитного объекта в магнитное поле и может быть определена по формуле
![]() , (А.1)
, (А.1)
где ![]() - намагниченность, А/м;
- намагниченность, А/м;
![]() - индукция магнитного поля, Тл;
- индукция магнитного поля, Тл;
![]() - магнитная восприимчивость;
- магнитная восприимчивость;
![]() - объем объекта, м
- объем объекта, м;
![]() - магнитная постоянная, Гн/м.
- магнитная постоянная, Гн/м.
Направление - к изоцентру томографа (см. [12]).
А.2 Крутящий момент, действующий на ИМИ
Магнитно-индуцированный крутящий момент как статический, так и динамический, действует на все ферромагнитные, парамагнитные и диамагнитные объекты (включая все металлы) и обуславливает поворот в направлении линий индукции магнитного поля (см. [13]).
Величина крутящего момента зависит от:
- индукции постоянного магнитного поля ![]() ;
;
- размеров и геометрии ИМИ;
- магнитных свойств материала ИМИ.
Динамический магнитно-индукцированный крутящий момент зависит от:
- скорости движения;
- расположения;
- величины пространственного градиента магнитного поля;
- проводимости материала ИМИ.
Величину крутящего момента определяют по формуле
![]() , (А.2)
, (А.2)
где ![]() - намагниченность, А/м;
- намагниченность, А/м;
![]() - индукция магнитного поля, Тл;
- индукция магнитного поля, Тл;
![]() - магнитная восприимчивость;
- магнитная восприимчивость;
![]() - объем объекта, м
- объем объекта, м;
![]() - магнитная постоянная, Гн/м;
- магнитная постоянная, Гн/м;
![]() - угол между объектом и линиями индукции, рад;
- угол между объектом и линиями индукции, рад;
- единичный вектор нормали.
А.3 РЧ-индуцированный нагрев
РЧ-индуцированный нагрев объектов в МРТ обусловлен воздействием переменного электромагнитного поля на проводник и может происходить с любым электропроводящим объектом (см. [14]).
Радиочастотный нагрев зависит от:
- электропроводности и диэлектрической проницаемости;
- конструкции ИМИ (сопротивления частей электронного устройства);
- геометрических размеров и конфигурации;
- проводимости и диэлектрической проницаемости окружающей ткани;
- энергии РЧ-импульсов (характеризуемой УКП);
- геометрического расположения ИМИ относительно передающей РЧ-катушки;
- ориентации тела пациента относительно передающей РЧ-катушки;
- характеристик РЧ-катушки и электромагнитного поля;
- центральной частоты конкретной МР-системы.
А.4 Градиент-индуцированный нагрев
Изменение магнитного поля во времени ![]() , характерное для градиентных полей МРТ, является причиной индуцирования вихревых токов на плоских проводящих поверхностях имплантата (см. [14]).
, характерное для градиентных полей МРТ, является причиной индуцирования вихревых токов на плоских проводящих поверхностях имплантата (см. [14]).
Мгновенная мощность ![]() , Вт, создаваемая вихревыми токами, индуцированными в цилиндрическом проводящем диске изменяющимся во времени магнитным полем, может быть рассчитана по формуле (А.3). Пояснение дано на рисунке А.1.
, Вт, создаваемая вихревыми токами, индуцированными в цилиндрическом проводящем диске изменяющимся во времени магнитным полем, может быть рассчитана по формуле (А.3). Пояснение дано на рисунке А.1.
 , (А.3)
, (А.3)
где - электропроводность, См;
- толщина материала, м;
![]() - радиус, м;
- радиус, м;
![]() - скорость изменения магнитного поля, Тл/с;
- скорость изменения магнитного поля, Тл/с;
![]() - угол вектора
- угол вектора ![]() относительно нормали к плоскости диска, рад.
относительно нормали к плоскости диска, рад.
|
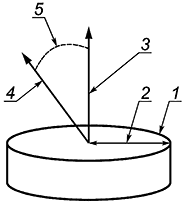
1 - корпус ИМИ с электропроводностью и толщиной материала Т; 2 - радиус
![]() корпуса ИМИ; 3 - вектор нормали к плоскости ИМИ; 4 -
корпуса ИМИ; 3 - вектор нормали к плоскости ИМИ; 4 - ![]() вектор скорости изменения магнитного поля; 5 - угол
вектор скорости изменения магнитного поля; 5 - угол ![]() вектора
вектора ![]() относительно нормали к плоскости устройства
относительно нормали к плоскости устройства
Рисунок А.1 - Цилиндрический проводящий диск и соответствующие параметры, которые влияют на градиентный нагрев
При определении средней мощности, выделяемой в устройстве и связанной с ним ткани, среднеквадратичное значение градиента ![]() , а также интеграл по времени от экспозиции и угла падения к объему проводящего материала ИМИ должны быть определены для конкретной импульсной последовательности (последовательностей). Нагрев будет наибольшим для имплантатов с большой площадью поверхности и высокой электропроводностью.
, а также интеграл по времени от экспозиции и угла падения к объему проводящего материала ИМИ должны быть определены для конкретной импульсной последовательности (последовательностей). Нагрев будет наибольшим для имплантатов с большой площадью поверхности и высокой электропроводностью.
Примечание - Нагрев устройства, вызванный вихревыми токами, индуцированными градиентным полем, пропорционален квадрату ![]() .
.
Величина и ориентация векторов магнитного поля с импульсным градиентом изменяются по всему объему гентри сканера. Нагрев ИМИ максимален в точке максимума ![]() . Кроме того, нагрев обычно является наибольшим, когда устройство ориентировано так, что вектор градиентного поля ортогонален поверхности(ям) ИМИ с наибольшей проводящей площадью. Однако могут быть исключения, когда максимальный нагрев происходит при другой ориентации. Например, устройства с необычной конструкцией корпуса или устройства, в которых значительная мощность отводится во внутренние компоненты, могут максимально нагреваться при неочевидной ориентации по отношению к вектору
. Кроме того, нагрев обычно является наибольшим, когда устройство ориентировано так, что вектор градиентного поля ортогонален поверхности(ям) ИМИ с наибольшей проводящей площадью. Однако могут быть исключения, когда максимальный нагрев происходит при другой ориентации. Например, устройства с необычной конструкцией корпуса или устройства, в которых значительная мощность отводится во внутренние компоненты, могут максимально нагреваться при неочевидной ориентации по отношению к вектору ![]() .
.
А.5 Напряжение, индуцированное градиентными магнитными полями
Воздействие градиентных магнитных полей на проводящие ИМИ может привести к индуцированию на их поверхности напряжения и (в результате) активации/деактивации или нарушению работы АИМИ, а также нагреву или вибрации (см. [14]).
Градиентно-индуцированные воздействия зависят от:
- максимального градиента магнитной индукции (,
,
), мТл/м;
- скорости нарастания градиента, Тл/м/с;
- положения и ориентации ИМИ в градиентной катушке;
- эффективной области индуцирования, проводимости материалов и индукции постоянного магнитного поля ![]() .
.
А.6 Вибрация, вызванная воздействием градиентных полей
Градиенты импульсного магнитного поля от МР-сканера индуцируют вихревые токи на проводящих поверхностях АИМИ. Эти вихревые токи создают изменяющийся во времени магнитный момент, который взаимодействует со статическим магнитным полем (![]() ), вызывая вибрацию проводящих поверхностей и, следовательно, имплантата (см. [14]).
), вызывая вибрацию проводящих поверхностей и, следовательно, имплантата (см. [14]).
МР-индуцированная вибрация отличается от типичной для АИМИ вибрации (например, транспортирование, активность пациента), когда приложенные силы и крутящие моменты являются внешними по отношению к устройству. Кроме того, МР-индуцированная вибрация возникает на более высоких частотах.
Возникновение в ИМИ вибраций, вызванных воздействием градиентных полей, может привести к нарушению функционирования, выходу из строя имплантата, а также дискомфорту пациента и травме ткани.
А.7 Нарушение функционирования или выход из строя АИМИ
Причиной неисправности АИМИ могут стать:
- постоянное магнитное поле ![]() ;
;
- градиентные магнитные поля ![]() ;
;
- РЧ-поле ![]() ;
;
- такие факторы, как конфигурация АИМИ, ориентация и состояние (включено, выключено, режим ожидания и др.).
Возникновение неисправности в значительной степени зависит от типа АИМИ и может стать причиной отсутствия или подачи ложного сигнала на электро- или механический элемент (см. [14]).
А.8 Другие риски
К другим рискам относятся:
- артефакты изображений: наличие ИМИ у пациента зачастую приводит к возникновению артефактов на изображениях. Оценка влияния конкретного ИМИ включает оценку качества изображений, описанную в [15];
- нервная стимуляция: если электропроводящее ИМИ находится в контакте с тканями организма, существует потенциальный риск нервной стимуляции электрическими токами, индуцированными градиентными полями и РЧ-импульсами;
- нарушение функционирования МРТ: если ИМИ излучает РЧ-энергию, существует вероятность того, что функционирование МР-системы будет нарушено;
- влияние звукового давления: если ИМИ реагирует на высокие уровни звукового давления, существует потенциальный риск того, что оно не будет функционировать должным образом (см. [2]).
Приложение Б
(справочное)
Примеры параметров импульсных последовательностей
Таблица Б.1 - Последовательность для Phillips Achieva, 1,5 Тл
Параметр | Значение |
Последовательность | Turbo Spin Echo |
Время повторения (TR) | 260 мс |
Время регистрации эхо-сигнала (TE) | 6 мс |
Длина эхо-трейна | 16 |
Плоскость | Корональная |
Угол поворота | 90° |
Ширина полосы пропускания приемника | 69 кГц |
Размер поля обзора | 45 см |
Размер матрицы | 264 |
Толщина среза | 10 мм |
Число срезов | 4 |
УКП всего тела | 4 Вт/кг |
Число усреднений | 27 |
Динамики (Dynamics) | 4 |
Время сканирования | 15:11 |
Примечание - Использовалась приемно-передающая катушка для всего тела. | |
Таблица Б.2 - Последовательность для Siemens Magnetom, 1,5 Тл
Параметр | Значение |
Последовательность | True Fisp |
Время повторения (TR) | 30 мс |
Время регистрации эхо-сигнала (TE) | 1,3 мс |
Угол поворота | 66° |
Ширина полосы пропускания приемника | 977 Гц/пиксель |
Размер поля обзора | 40 см |
Размер матрицы | 128 |
Размер секций | 10 мм |
Доля пропусков | 10% |
Число срезов | 43 |
Время сканирования | 15:00 |
Таблица Б.3 - Последовательность для General Electric Excite, 3 Тл
Параметр | Значение |
Последовательность | Fast Spin Echo |
Время повторения (TR) | 425 мс |
Время регистрации эхо-сигнала (TE) | 14 мс |
Длина эхо-трейна | 4 |
Плоскость | Аксиальная |
Угол поворота | 90° |
Ширина полосы пропускания приемника | 16 кГц |
Размер поля обзора | 40 см |
Размер матрицы | 256 |
Толщина среза | 10 мм |
Число срезов | 40 |
Усиление передатчика | 80 |
Время сканирования | 15:00 |
Примечание - Использовалась приемно-передающая катушка для всего тела. | |
Приложение В
(справочное)
Положение фантома для исследования ИМИ в различных анатомических зонах
|
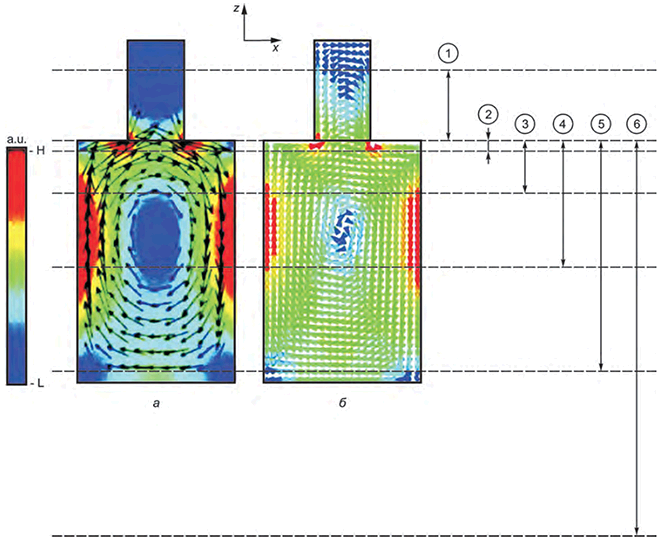
Пунктиром обозначена линия изоцентра магнита относительно фантома; а - смоделированная картина электрического поля, индуцированного градиентной катушкой в направлении оси , в фантоме с центром в изоцентре магнита; б - смоделированная РЧ-диаграмма электрического поля в фантоме с центром в изоцентре магнита
Рисунок В.1 - Схема позиционирования фантома
В таблицах В.1 и В.2 представлены данные о соответствии анатомических зон и пространственного положения фантома.
Таблица В.1 - Соответствие выбранной анатомической зоны, положения фантома и продолжительности МР-исследования
Целевая анатомическая зона | Положение фантома | Минимальная продолжительность, мин |
Неврологическое обследование | ||
Мозг | 1а | 6 |
Поясничный отдел позвоночника | 5 | 4 |
Торакальное обследование | ||
Печень | 4 | 4 |
Почки | 4 | 2 |
Магнитно-резонансная холангиопанкреатография (MRCP) | 4 | 2 |
Энтерография | 4 | 2 |
Грудная клетка | 3 | 2 |
Сердце | 3 | 5 |
Обследования верхних конечностей | ||
Рука | 5 | 3 |
Плечо | 2 | 3 |
Обследование тазовой области | ||
Простата | 5 | 3 |
Вульва и вагина | 5 | 5 |
Обследования нижних конечностей | ||
Колено | 6 | 2 |
Бедро | 6 | 5 |
Таблица В.2 - Расположение фантома относительно изоцентра магнита
Положение фантома | Расстояние до изоцентра, см |
1 | -19 |
2 | 3 |
3 | 14 |
4 | 34 |
5 | 62 |
6 | 106 |
Библиография
[1] | Keevil S. Safety in magnetic resonance imaging. Med Phys int J. 2016; 4(1):26-34, Kanal E., Barkovich A.J., Bell C., Borgstede J.P., Bradley W.G., Froelich J.W., et al. ACR guidance document on MR safe practices: 2013. J Magn Reson Imaging. 2013; 37 (3): 501-30. DOI: 10.1002/jmri.24011* | |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
[2] | АСТМ Ф2503 | Стандартная практика для маркировки медицинских изделий и других изделий в отношении безопасности в магнитно-резонансной среде |
(ASTM F2503) | (Standard Practice for Marking Medical Devices and Other Items for Safety in the Magnetic Resonance Environment) | |
[3] | АСТМ Ф2182 | Стандартный метод испытания для измерения радиочастотного индуцированного нагрева на или вблизи неактивных имплантатов во время магнитно-резонансной томографии |
(ASTM F2182) | (Standard Test Method for Measurement of Radio Frequency Induced Heating On or Near Passive Implants During Magnetic Resonance Imaging) | |
[4] | Kainz, W., Editorial, "MR Heating Tests of MR Critical Implants", Journal of Magnetic Resonance Imaging, Vol. 26, 2007, pp.450-451 | |
[5] | Baker, K.B., Tkach, J., Hall, J.D., Nyenhuis, J.A., Shellock, F.G., Rezai, A.R., "Reduction of Magnetic Resonance Imaging-related Heating in Deep Brain Stimulation Leads Using a Lead Management Device", Neurosurgery, Vol 57, 2005, pp.392-397 | |
[6] | Park, S.M., "MRI Safety: Radiofrequency Field Induced Heating of Implanted Medical Devices", Ph.D. Thesis, Purdue University, 2006 | |
[7] | Schaefers, G., Kugel, H., Stenschke, J., and Zylka, W., "A basic experimental and numerical investigation of RF heating effects on total hip prostheses during MRI at 1.5 Tesla", Proceedings of the Annual Meeting of the German, Austrian and Swiss Societies for Biomedical Engineering, Zurich, Switzerland, September 2006, Biomed Tech 2006, Vol 51 (Suppl 1), CD-ROM (Poster: P97) | |
[8] | Amjad, A., Kamondetdacha, R., Kildishev, A.V., Park, S.M. and Nyenhuis, J.A., "Power Deposition Inside a Phantom for Testing of MRI Heating", IEEE Transactions on Magnetics, Vol 41, No.10, October 2005, p.4185 | |
[9] | Baker, K.B., Tkach, J.A., Phillips, M., Rezai, A.R., "Variation in RF-induced Heating of a Deep Brain Stimulation Implant Across MR Systems", Journal of Magnetic Resonance Imaging, Vol 24, 2006, pp.1236-1242 | |
[10] | Rezai, A.R., Finelli, D., Nyenhuis, J.A., Hrdlick, G., Tkach, J., Ruggieri, P., Stypulkowski, P.H., Sharan, A., Shellock, F.G., "Neurostimulator for deep brain stimulation: Ex vivo evaluation of MRI-related heating at 1.5-Tesla", Journal of Magnetic Resonance Imaging, Vol 15, 2002, pp.241-250 | |
[11] | NEMA MS 8-2008 | Характеристика удельного коэффициента поглощения для магнитно-резонансных систем |
(NEMA MS 8-2008) | (Characterization of the Specific Absorption Rate for Magnetic Resonance Imaging Systems) | |
[12] | АСТМ Ф2052 | Метод испытания для измерения магнитно-индуцированной силы смещения на медицинских изделиях в магнитно-резонансной среде |
(ASTM F2052) | (Test Method for Measurement of Magnetically Induced Displacement Force on Medical Devices in the Magnetic Resonance Environment) | |
[13] | АСТМ Ф2213 | Метод испытания для измерения магнитно-индуцированного вращающего момента на медицинских изделиях в магнитно-резонансной среде |
(ASTM F2213) | (Test Method for Measurement of Magnetically Induced Torque on Medical Devices in the Magnetic Resonance Environment) | |
[14] | ISO/TS 10974:2018 | Оценка безопасности магнитно-резонансной томографии для пациентов с активными имплантируемыми медицинскими изделиями |
(ISO/TS 10974:2018) | (Assessment of the safety of magnetic resonance imaging for patients with an active implantable medical device) | |
[15] | МЭК 62464-1 | Оборудование магнитно-резонансное для медицинской визуализации. Часть 1. Определение основных параметров качества изображения |
(IEC 62464-1) | (Magnetic resonance equipment for medical imaging - Part 1: Determination of essential image quality parameters) | |
УДК 615.47:006.354 | ОКС 11.040.55 |
Ключевые слова: имплантируемое медицинское изделие, магнитно-резонансная томография, имплантат, фантом, требования, испытания, классификация | |
Электронный текст документа
и сверен по:
, 2020
{kind=link}