ПНСТ 752-2022/ISO/DIS 10218-1:2021
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
Часть 1
Промышленные роботы
Robots and robotics devices. Safety requirements. Part 1. Industrial robots
ОКС 25.040.30
Срок действия с 2023-01-01
до 2024-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным учреждением "Российский институт стандартизации" (ФГБУ "РСТ") на основе собственного перевода на русский язык англоязычной версии проекта стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 10 октября 2022 г. N 79-пнст
4 Настоящий стандарт идентичен проекту стандарта ISO/DIS 10218-1-2021* "Робототехника. Требования к безопасности. Часть 1. Промышленные роботы" (ISO/DIS 10218-1:2021 "Robotics - Safety requirements - Part 1: Industrial robots", IDT).
Наименование настоящего стандарта изменено относительно наименования указанного проекта стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 Некоторые элементы настоящего стандарта могут быть объектами патентных прав. Международная организация по стандартизации (ИСО) и Международная электротехническая комиссия (МЭК) не несут ответственности за установление подлинности каких-либо или всех таких патентных прав
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 117418 Москва, Нахимовский проспект, д.31, корп.2, e-mail: [email protected] и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространены на роботов и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения"; "Технические и эксплуатационные характеристики"; "Безопасность"; "Виды и методы испытаний"; "Механические интерфейсы"; "Электрические интерфейсы"; "Коммуникационные интерфейсы"; "Методы моделирования и программирования"; "Методы построения траектории движения (навигация)"; "Конструктивные элементы". Стандарты любой тематической группы могут иметь отношение как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: к промышленным роботам в целом и промышленным манипуляционным роботам в частности; промышленным транспортным роботам; к сервисным роботам в целом и сервисным манипуляционным роботам, сервисным мобильным роботам в частности, а также к морским робототехническим комплексам.
Настоящий стандарт создан с учетом тех опасностей, которые робототехника представляет в промышленной среде. В части 1 ИСО 10218 роботы рассмотрены как неполные машины, а в части 2 - роботы, интегрированные в полные машины (системы) для конкретных способов применения.
Часть 1 ИСО 10218 является стандартом типа C, как указано в ИСО 12100.
Когда положения стандарта типа C отличаются от тех, которые изложены в стандартах типа A или B, положения стандарта типа C имеют приоритет над положениями других стандартов для тех машин, которые спроектированы и изготовлены согласно положениям стандарта типа C.
Соответствующее оборудование и та степень, в которой опасности, проблематичные ситуации и события охватываются и указываются, представлены в области применения части 1 ИСО 10218.
Примечание - Не все опасности, указанные в этом стандарте, применимы к каждому роботу, и уровень риска, связанный с данной опасной ситуацией, не будет одинаковым для каждого робота. Следовательно, требования безопасности, или меры защиты, или и то и другое могут отличаться от того, что указано в настоящем стандарте. Производитель роботов может провести оценку рисков для того, чтобы определить, какие защитные меры должны быть.
Принимая во внимание переменный характер опасностей, связанных с различным использованием промышленных роботов, ИСО 10218 разделен на две части. В части 1 ИСО 10218 установлены требования к обеспечению безопасности при проектировании и изготовлении робота. Поскольку безопасность применения промышленных роботов зависит от конструкции и использования робототехнической системы, в части 2 ИСО 10218 представлены рекомендации по защите операторов во время интеграции, установки, функционального тестирования, программирования, эксплуатации, обслуживания и ремонта.
Обе части ИСО 10218 касаются робототехники в промышленной среде. Другие стандарты охватывают такие темы, как системы координат и движения осей, общие характеристики, критерии производительности и соответствующие методы тестирования, терминологию и механические интерфейсы. Следует отметить, что эти стандарты как взаимосвязаны, так и связаны с другими международными стандартами.
Для облегчения восприятия настоящего стандарта слова "робот" и "робототехнический комплекс" соотнесены со словами "промышленный робот" и "промышленная роботизированная система", как определено в ИСО 10218-1 и ИСО 10218-2.
Настоящий стандарт обновлен на основе опыта, накопленного с момента выпуска ИСО 10218-1 и ИСО 10218-2 в 2011 г., и соответствует минимальным требованиям гармонизированного стандарта типа C для роботов, используемых в промышленной среде.
В соответствующих случаях руководство, содержащееся в ISO/TS 15066:2016 по безопасности систем совместного применения роботов, добавлено в ИСО 10218. Большая часть ISO/TS 15066 включена в ИСО 10218-2, поскольку совместная работа человека и робота относится к применению робота, а не только к роботу. Функции безопасности, которые позволяют выполнять совместную задачу, могут быть встроены в робота или могут быть обеспечены защитным устройством либо комбинацией робота и защитного устройства.
Следует отметить, что термин "совместный робот" не использован в ИСО 10218-1, так как только применение робота может быть разработано, проверено и утверждено как совместное применение. Кроме того, в настоящем стандарте не использован термин "совместная работа".
Изменения включают, но не ограничиваются:
- функциями остановки категории 2;
- определениями;
- требованиями функциональной безопасности;
- маркировкой;
- выбором режима;
- требованиями к мощности и ограничению силы;
- требованиями к потерям мощности.
Настоящий стандарт не применяется к тем роботам, которые произведены до даты его публикации.
1 Область применения
Настоящий стандарт определяет требования для безопасной конструкции, защитные меры и информацию по использованию роботов в промышленной среде.
В настоящем стандарте робот рассмотрен в качестве незаконченной машины.
Настоящий стандарт не распространяется на следующие виды использования и продукты:
- подводные;
- применение в правоохранительных органах;
- военные (оборонные);
- бортовые и космические роботы, в том числе использование в космосе;
- медицинские роботы;
- роботы для охраны здоровья;
- протезирование и другие средства помощи для инвалидов;
- сервисные роботы, обслуживающие людей и поэтому доступные широкому кругу людей;
- использование в качестве потребительских товаров, поскольку они предназначены для применения в домашних условиях и доступны населению;
- подъем или транспортирование людей;
- мобильные платформы;
- телеуправляемые манипуляторы.
Примечание 1 - Требования к роботизированным системам, интеграции и применениям изложены в ИСО 10218-2.
Примечание 2 - Дополнительные опасности могут быть созданы при определенных применениях (например, сварка, лазерная резка, механическая обработка). Эти, связанные с системой опасности, необходимо учитывать при проектировании роботизированной системы и применения робота. См. ИСО 10218-2.
В настоящем стандарте рассмотрены все существенные опасности, сопряженные с риском ситуации или события при использовании роботов и робототехнических устройств по назначению и в определенных условиях их неправильного применения, которые производитель может предусмотреть.
В настоящем стандарте не рассмотрены опасности, связанные:
- с экстремальными условиями (например, экстремальный климат, морозильные камеры, сильные магнитные поля) вне спецификации производителя;
- подземным использованием;
- особыми гигиеническими требованиями;
- использованием в ядерных средах;
- применением во взрывоопасных средах;
- использованием в средах с уровнями ионизирующего и неионизирующего излучения;
- опасными ионизирующими и неионизирующими излучениями;
- обращением с грузами, характер которых может привести к опасным ситуациям (например, расплавленные металлы);
- кислотами/основаниями, излучающими материалами;
- проведением каких-либо действий, подъемом или транспортированием людей;
- доступом широкого круга людей или необученных взрослых, т.е. для сервисных роботов, потребительских товаров.
Излучение шума обычно не считают существенной опасностью одного робота, поэтому шум исключается из области применения.
Однако это не относится к тем роботам, которые произведены до даты публикации настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты и документы [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
ISO 4413:2010, Hydraulic fluid power - General rules and safety requirements for systems and their components (Гидравлика. Общие правила и требования безопасности, касающиеся систем и их компонентов)
ISO 4414:2010, Pneumatic fluid power - General rules and safety requirements for systems and their components (Пневматика. Общие правила и требования безопасности, касающиеся систем и их компонентов)
ISO 7010:2019, Graphical symbols - Safety colours and safety signs - Registered safety signs (Символы графические. Цвета и знаки безопасности. Зарегистрированные знаки безопасности)
ISO 12100:2010, Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин. Общие принципы конструирования. Оценка рисков и снижение рисков)
ISO 13732-1:2006, Ergonomics of the thermal environment - Methods for the assessment of human responses to contact with surfaces - Part 1: Hot surfaces (Эргономика термальной среды. Методы оценки реакции человека при контакте с поверхностями. Часть 1. Горячие поверхности)
ISO 13849-1:2015, Safety of machinery - Safety-related parts of control systems - Part 1: General principles for design (Безопасность машин. Детали систем управления, связанные с обеспечением безопасности. Часть 1. Общие принципы проектирования)
ISO 13850:2015, Safety of machinery - Emergency stop function - Principles for design (Безопасность машин и механизмов. Функция аварийной остановки. Принципы проектирования)
ISO 14118:2017, Safety of machinery - Prevention of unexpected start-up (Безопасность машин. Предупреждение неожиданных пусков)
ISO 14119:2013, Safety of machinery - Interlocking devices associated with guards - Principles for design and selection (Безопасность машин. Блокировочные устройства для ограждений. Принципы конструирования и выбора)
ISO 14120:2015, Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards (Безопасность машин. Защитные ограждения. Общие требования к проектированию и конструированию стационарных и съемных защитных ограждений)
ISO 19353:2019, Safety of machinery - Fire prevention and fire protection (Безопасность машин. Предотвращение пожара и защита от него)
ISO 20607:2019, Safety of machinery - Instruction handbook - General drafting principles (Безопасность машин. Справочник. Общие принципы проектирования)
ISO 20643:2005/AMD 1:2012, Mechanical vibration - Hand-held and hand-guided machinery - Principles for evaluation of vibration emission (Вибрация механическая. Ручные машины и машины с ручным приводом. Принципы оценивания вибрационной эмиссии)
IEC 60204-1:2016, Safety of machinery - Electrical equipment of machines - Part 1: General requirements (Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования)
IEC 60947-5-8:2006, Low-voltage switchgear and controlgear - Part 5-8: Control circuit devices and switching elements - Three-position enabling switches (Аппаратура распределения и управления низковольтная. Часть 5-8. Аппараты и элементы коммутации для цепей управления. Трехпозиционные переключатели с функцией разблокирования)
IEC 61310-1:2007, Safety of machinery - Indication, marking and actuation - Part 1: Requirements for visual, acoustic and tactile signals (Безопасность машин. Индикация, маркировка и приведение в действие. Часть 1. Требования к визуальным, звуковым и тактильным знакам)
IEC 61310-2:2007, Safety of machinery - Indication, marking and actuation - Part 2: Requirements for marking (Безопасность машинного оборудования. Индикация, маркировка и приведение в действие. Часть 2. Требования для маркировки)
IEC 61310-3:2007, Safety of machinery - Indication, marking and actuation - Part 3: Requirements for locations and operation of actuators (Безопасность машин. Индикация, маркировка и приведение в действие. Часть 3. Требования к расположению и работе исполнительных механизмов)
IEC 61508-2:2010, Functional safety of electrical/electronic/programmable electronic safety related systems - Part 2: Requirements for electrical/electronic/programmable electronic safety related systems (Системы электрические/электронные/программируемые электронные, связанные с функциональной безопасностью. Часть 2. Требования к электрическим/электронным/программируемым электронным системам, связанным с безопасностью)
IEC 62061:2015, Safety of machinery - Functional safety of safety-related electrical, electronic and programmable electronic control systems (Безопасность машин и механизмов. Функционапьная безопасность систем управпения электрических, электронных и программируемых электронных, связанных с безопасностью)
IEC 62745:2017, Safety of machinery - Requirements for cableless control systems of machinery (Безопасность машин. Требования к системам беспроводного управления станком)
3 Термины, определения и сокращения
В настоящем стандарте применены термины по ИСО 12100, а также следующие термины с соответствующими определениями.
ИСО и МЭК поддерживают терминологические базы данных для использования в стандартизации по следующим адресам:
- платформа ИСО для онлайн-просмотра, доступная по адресу: http://www.iso.org/obp;
- Электропедия МЭК, доступная по адресу: http://www.electropedia.org.
3.1 Термины и определения
3.1.1 Робот, роботизированная система, применение робота
3.1.1.1 промышленная среда (industrial environment): Рабочее место, к которому доступ посторонних лиц ограничен или не ожидается их присутствие для намеченных задач и применения промышленных роботов (3.19).
Примечание - Сюда входят производство, лаборатории, фармацевтика, складирование, логистика и т.д.
3.1.1.2 (промышленный) робот (industrial robot, robot): Автоматически управляемый(е), перепрограммируемый(е) многоцелевой(е) манипулятор(ы) (3.1.2.5), программируемый(е) по трем или более степеням движения (3.1.2.1), который может быть либо зафиксированным(и) на месте, либо зафиксированным(и) на мобильной платформе (3.1.2.8) для использования в приложениях (3.1.1.6) промышленной среды (3.1.1.1).
Примечание 1 - Промышленный робот включает:
- манипулятор (3.1.2.5), включая привод робота (3.1.2.10), управляемый контроллером робота;
- контроллер робота;
- средства, с помощью которых можно обучить или запрограммировать робота, включая любой интерфейс связи (аппаратное обеспечение и программное обеспечение).
Примечание 2 - Промышленный робот включает любые вспомогательные оси (3.1.2.2), которые интегрированы в кинематическое решение.
Примечание 3 - К промышленным роботам относят:
- управляющую(ие) часть(и) мобильных роботов, где мобильный робот состоит из мобильной платформы (3.1.2.8) со встроенным манипулятором (3.1.2.5) или робота (3.1.1.2);
- роботов с ручным управлением (HGC);
- роботов с функцией ограничения мощности и силы (PFL);
- роботов с ограничением мощности и силы;
- роботов со встроенной функцией мониторинга скорости и разделения (SSM).
3.1.1.3 (промышленная) роботизированная система (robot system, industrial robot system): Машина в составе промышленного робота (3.1.1.2), рабочего(их) органа(ов) робота (3.1.2.3) и любых датчиков рабочего органа и оборудование, необходимые для выполнения поставленной задачи и программы задач (3.1.4.2).
Примечание - Примеры оборудования: системы технического зрения, дозирование клея, контроль сварки.
3.1.1.4 применение робота; применение промышленного робота; машина, состоящая из промышленной роботизированной системы (3.1.1.3), деталей, машин и оборудования [robot application, industrial robot application, machine comprising an industrial robot system (3.1.1.3), workpieces, machinery and equipment application]: Применение по назначению и цели робота (3.1.1.2) или роботизированной системы (3.1.1.3), т.е. процесс, задача(и).
Пример - Манипуляции, обработка, механическая обработка, проверка, точечная сварка, покраска, сборка, укладка на поддоны.
3.1.1.5 совместное применение (collaborative application): Часть последовательности действий робота, в которой робот (3.1.1.4) и оператор (3.1.7.2) находятся в одном и том же защищенном пространстве (3.1.9.5).
3.1.1.6 совместная задача (collaborative task): Часть последовательности действий робота, в которой роботизированная система (3.1.1.3) и оператор (3.1.7.2) находятся в одном защищенном пространстве (3.1.9.5).
Примечание - Задача может быть совместной, сосуществующей или совмещенной.
3.1.1.7 (промышленная) роботизированная ячейка (industrial robot cell, robot cell): Одно или несколько применений роботов (3.1.1.4), включая любой объект, который влияет на оценку риска предполагаемого использования, связанные с ним защищенные пространства (3.1.9.5) и меры безопасности (3.1.10.2).
3.1.2 Подузлы и компоненты роботов, роботизированных систем и применений роботов
3.1.2.1 ось (axis): Приводимое в действие механическое соединение (например, вращающееся вокруг оси, линейное), обеспечивающее как минимум одну степень свободы.
3.1.2.2 вспомогательная ось (auxiliary axis): Ось (3.1.2.1), которая физически не является частью манипулятора (3.1.2.5) и управляется роботом (3.1.1.2).
Примечание - Слово "управляется" означает, что есть сигнал(ы) обратной связи, позволяющий(е) роботу управлять в условиях замкнутого контура.
3.1.2.3 рабочий орган робота (end-effector): Устройство, специально разработанное для присоединения к механическому интерфейсу (3.1.2.7) для того, чтобы робот (3.1.1.2) мог выполнять свою задачу.
Пример - Захват, сварочный пистолет, распылительный пистолет.
Примечание - Рабочие органы иногда называют инструментами на конце руки (EOAT).
3.1.2.4 захват (gripper): Рабочий орган робота (3.1.2.3), предназначенный для захвата и удержания заготовок.
Примечание - Различные типы захватов и термины "захват", "зажим", "зажим" и "освобождение" определены в ИСО 14539:2000.
[ИСО 14539:2000, статья 4.1.2, модифицирован]
3.1.2.5 манипулятор (manipulator): Механизм, состоящий из группы сегментов, соединенных или скользящих друг относительно друга.
Примечание - Манипулятор (3.1.2.5) включает в себя приводы робота (3.1.2.10).
3.1.2.6 масса на манипулятор М (mass per manipulator M): Масса всех движущихся частей робота (3.1.1.2).
3.1.2.7 механический интерфейс (mechanical interface): Монтажная поверхность на конце манипулятора (3.1.2.5), к которой прикреплен рабочий орган робота (3.1.2.3).
3.1.2.8 мобильная платформа (mobile platform): Сборка компонентов, допускающая передвижение и обеспечивающая конструкцию для крепления манипулятора (3.1.2.5).
3.1.2.9 полезная нагрузка (payload): Масса всего, что прикреплено к манипулятору (3.1.2.5), включая рабочий орган робота (3.1.2.3) и заготовку.
Примечание - Полезной нагрузкой может быть, но не ограничиваясь этим, полезная нагрузка, прикрепленная к механическому интерфейсу (3.1.2.7) робота (3.1.1.2).
3.1.2.10 привод робота (robot actuator): Приводной механизм, преобразующий энергию в движение.
Примечание - Энергия может быть электрической, гидравлической, пневматической и т.д.
3.1.2.11 центр инструмента; TCP (tool centre point, TCP): Точка, определенная для данного применения робота (3.1.1.4) с учетом системы координат механического интерфейса (3.1.2.7).
Примечание - Настройка TCP определяет расположение TCP относительно механического интерфейса.
3.1.3 Термины, связанные с элементами управления
3.1.3.1 пульт управления (control station): Совокупность устройств, которая содержит одно или несколько устройств управления, предназначенных для активации или деактивации функций.
Примечание - Пульт управления может быть закреплен на месте (например, панель управления) или может быть мобильным [обучающий мобильный пульт или мобильный пульт (3.1.3.2), который можно назвать переносным пультом управления].
3.1.3.2 (обучающий) мобильный пульт (teach pendant, pendant): Переносной ручной пульт управления (3.1.3.1), связанный с роботом (3.1.1.2), с помощью которого робот может быть запрограммирован, перемещен или приведен в действие.
3.1.3.3 прямое управление (direct control): Состояние системы или частей системы, в которых управление осуществляют только с пульта управления (3.1.3.1) или обучающего мобильного пульта (3.1.3.2) отдельной(ых) машины (машин) или частей машины (машин).
3.1.3.4 единая точка управления (single-point-of-control): Способность управлять роботом (3.1.1.2) таким образом, что инициирование движения возможно только из одного источника управления и не может быть отменено из другого источника инициирования.
3.1.3.5 сингулярность (singularity): Ситуация, возникающая каждый раз, когда ранг матрицы Якоби становится меньше полного ранга.
Примечание - Математически, в сингулярной конфигурации, суставная скорость в суставном пространстве может стать бесконечной для поддержания декартовой скорости. В реальной работе движения, определенные в декартовом пространстве и проходящие вблизи сингулярностей, могут создавать высокие осевые скорости. Такие высокие скорости могут быть неожиданными для оператора (3.1.7.2).
[ИСО 10218-1:2011, статья 3.21]
3.1.3.6 область управления (span-of-control): Заранее определенная часть роботизированной ячейки (3.1.1.7) или машины, которая находится под управлением определенного устройства для функции безопасности (3.1.8.1).
Примечание - Область управления может применена к составной части, части машины, неполной машине, т.е. к роботу (3.1.1.2) или машине в роботизированной ячейке (3.1.1.7).
3.1.3.7 одновременное движение (simultaneous motion): Движение двух или более роботов (3.1.1.2) одновременно под управлением одного пульта управления (3.1.3.1), которое может быть скоординированным или синхронным.
Примечание - Мобильный пульт (3.1.3.2) является примером единственного пульта управления (3.1.3.1).
3.1.3.8 режим (работы) (mode, operating mode): Характеристика способа и степени вмешательства оператора (3.1.7.2) в оборудование управления.
Примечание - В контексте настоящего стандарта режим относится к состоянию управления роботом (3.1.1.2), например автоматический режим (3.1.3.10), ручной режим (3.1.3.9).
3.1.3.9 ручной режим (manual mode): Состояние управления, позволяющее осуществлять прямой контроль (3.1.3.3).
Примечание - Иногда называется режимом обучения, в котором задают программные точки и атрибуты робота (3.1.1.2).
3.1.3.10 автоматический режим (automatic mode): Состояние управления, позволяющее выполнять запрограммированные задачи.
3.1.4 Термины, связанные с программой
3.1.4.1 программа управления (control program): Неотъемлемый набор инструкций, который определяет возможности, действия и ответы робота (3.1.1.2).
Примечание - Этот тип программы является фиксированным и обычно не изменяется пользователем (3.1.7.3).
3.1.4.2 программа задач (task program): Набор тех инструкций по перемещению, вспомогательным функциям и процессу управления программой, которые определяют конкретную намеченную задачу роботизированной системы (3.1.1.3).
Примечание 1 - Этот тип программы создается во время интеграции (3.1.7.1) или пользователем (3.1.7.3).
Примечание 2 - Программа задач (3.1.4.2) может включать функции другого оборудования в рамках применения робота (3.1.1.4).
3.1.4.3 обучение; программирование задачи (глагол) [teach, task programming (verb)]: Программирование задачи, выполняемое вручную путем позиционирования манипулятора (3.1.2.5), или с использованием мобильного пульта (3.1.3.2) для перемещения робота (3.1.1.2) по позициям либо мобильного пульта для программирования, не вызывая движения, или с помощью внешнего устройства для автономного программирования.
Примечание - Ручное позиционирование может называться "сквозное обучение".
3.1.4.4 верификация программы (существительное) [program verification (noun)]: Выполнение программы задач (3.1.4.2) для подтверждения пути робота (3.1.1.2) и производительности процесса.
Примечание - Верификация (3.1.11.2) может включать общий путь, пройденный центральной точкой инструмента (TCP) (3.1.2.11) во время выполнения программы задач (3.1.4.2) или сегмента пути. Инструкции могут быть представлены в виде одной инструкции или непрерывной последовательности команд. Верификацию используют в новых совместных задачах (3.1.1.6) и при настройке/редактировании актуальных способов применения.
3.1.5 Термины, связанные с энергопитанием
3.1.5.1 мощность привода (drive power): Источник или источники энергии, позволяющие приводам робота (3.1.2.10) прикладывать силу или крутящий момент.
3.1.5.2 источник энергии (energy source): Электрические, механические, гидравлические, пневматические, химические, тепловые, потенциальные, кинетические или другие типы источников, способных обеспечивать энергией.
3.1.6 Термины, связанные с опасностью
3.1.6.1 опасность (hazard): Потенциальный источник вреда.
Примечание 1 - Термин "опасность" может быть квалифицирован, чтобы определить его происхождение (например, механическая опасность, опасность поражения электрическим током) или характер потенциального вреда (например, опасность поражения электрическим током, опасность порезов, опасность отравления, пожароопасность).
Примечание 2 - Опасность, предусмотренная этим определением, либо постоянно присутствует во время предполагаемого использования машины (например, движение опасных движущихся элементов, электрическая дуга во время фазы сварки, неудобное положение, излучение шума, высокая температура), либо может возникнуть неожиданно (например, взрыв, опасность раздавливания в результате непреднамеренного/неожиданного пуска, выброс в результате поломки, падение в результате ускорения/замедления).
[ИСО 12100:2010, статья 3.6, модифицирован путем удаления примечания 3]
3.1.6.2 опасное движение (hazardous motion): Движение, которое может причинить телесные повреждения или нанести вред здоровью.
3.1.6.3 опасная ситуация (hazardous situation): Обстоятельства, при которых человек подвергается как минимум одной опасности (3.1.6.1).
Примечание - Воздействие может причинить вред немедленно или спустя некоторый промежуток времени.
[ИСО 12100:2010, статья 3.10]
3.1.7 Термины ролей
3.1.7.1 интеграция (integration): Акт объединения робота (3.1.1.2) с другим оборудованием или другой машиной, включая дополнительные роботизированные системы (3.1.1.3) и применения роботов (3.1.1.4), чтобы сформировать роботизированную ячейку (3.1.1.7), способную выполнять полезную работу.
Примечание - Этот акт машиностроения может включать требования по установке машин и оборудования, связанных с совместными задачами (3.1.1.6).
3.1.7.2 оператор (operator): Лицо или лица, использующее(ие), эксплуатирующее(ие), регулирующее(ие), обслуживающее(ие), очищающее(ие), ремонтирующее(ие), устраняющее(ие) неисправности, транспортирующие, вводящие в эксплуатацию и осуществляющие разборку робота (3.1.1.2), роботизированной системы (3.1.1.3) или роботизированной ячейки (3.1.1.7).
Примечание - Это определение включает человека или людей, которых можно ожидать на оборудовании или вблизи него, даже если они не выполняют задачу, связанную с конкретной машиной или частью машины.
3.1.7.3 пользователь (user): Субъект, который пользуется применением роботов (3.1.1.4) и роботизированной ячейки (3.1.1.7) и отвечает за действия оператора(ов) (3.1.7.2), связанных с применением роботов и роботизированных ячеек.
3.1.8 Термины, связанные с функциональной безопасностью
3.1.8.1 функция безопасности (safety function): Функция машины, отказ которой может привести к немедленному увеличению риска(ов).
[ИСО 12100:2010, статья 3.10]
3.1.8.2 функция аварийной остановки (emergency stop function): Функция, которая предназначена для предотвращения возникновения или уменьшения существующих опасностей (3.1.6.1) для людей, повреждения оборудования или незавершенного производства и инициируется исключительно действием человека.
Примечание - В ИСО 13850 изложены подробные положения.
[ИСО 12100:2010, статья 3.40]
3.1.8.3 защитная остановка (protective stop): Автоматическое прерывание работы, которое вызывает прекращение и предотвращение движения и сохраняет информацию о состоянии робота (3.1.1.2), включая его программу, для облегчения перезапуска.
3.1.8.4 контролируемая остановка (с функцией безопасности) (monitored standstill, safety-rated monitored stop): Функция безопасности (3.1.8.1), которая контролирует положение после остановки робота (3.1.1.2) при наличии питания привода.
3.1.8.5 контролируемая скорость (monitored-speed): Функция безопасности (3.1.8.1), ограничивающая скорость до заданного значения.
3.1.8.6 пониженная скорость (reduced-speed): Функция безопасности (3.1.8.1), ограничивающая скорость до 250 мм/с.
3.1.8.7 мягкое ограничение оси и пространства; мягкий предел (soft axis and space limiting, soft limit): Функция(и) безопасности (3.1.8.1) с контролируемым пределом(ами), установленным(и) на диапазон движения робота (3.1.1.2).
3.1.8.8 вход функции безопасности (safety function input): Входной сигнал с заданными характеристиками, связанными с безопасностью.
3.1.8.9 вывод функции безопасности (safety function output): Выходной сигнал с заданными характеристиками, связанными с безопасностью.
3.1.9 Термины пространства, зон и расстояний
3.1.9.1 максимальное пространство (maximum space): Пространство, доступное движущимся частям робота (3.1.1.2).
Примечание 1 - В контексте ИСО настоящего стандарта максимальное пространство относится к роботу (3.1.1.2). См. приложение B (рисунок B.2), где показано пространство робота.
Примечание 2 - В контексте ИСО 10218-2 максимальное пространство применяется либо к роботизированной системе (3.1.1.3), либо к роботу (3.1.1.4). См. приложение B (рисунки B.1 и B.3), где указаны пробелы.
Примечание 3 - В контексте мобильных платформ (3.1.2.8) максимальное пространство не определено.
3.1.9.2 рабочее пространство (operating space): Часть ограниченного пространства (3.1.9.3), которая используется при выполнении всех движений, управляемых программой задач (3.1.4.2).
Примечание - В контексте ИСО настоящего стандарта рабочее пространство относится к роботу (3.1.1.2).
3.1.9.3 ограниченное пространство (restricted space): Часть максимального пространства (3.1.9.1), уменьшенная ограничительными устройствами (3.1.9.4).
Примечание 1 - Когда ограниченное пространство относится к роботизированной системе (3.1.1.3), оно включает пространство, достигаемое рабочим органом (3.1.2.3) (см. ИСО 10218-2).
Примечание 2 - Когда ограниченное пространство относится к применению робота (3.1.1.4), оно включает пространство, достигаемое рабочим органом (3.1.2.3) и заготовкой(ами) (см. ИСО 10218-2).
3.1.9.4 ограничивающее устройство (limiting device): Устройство, уменьшающее диапазон движения максимального пространства (3.1.9.1) и приводящее к ограничению пространства (3.1.9.3).
Примечание 1 - ИСО 12100:2010, пункт 3.28.8 содержит более широкое определение ограничивающего устройства, которое охватывает не только движение. В ИСО 12100 это устройство, которое не позволяет машине или опасным условиям машины превысить расчетный предел (например, ограничение по пространству, предел давления, предел грузового момента и т.д.).
Примечание 2 - Ограничивающее(ие) устройство(а) может (могут) быть выполненной(ыми) функцией(ями) безопасности (3.1.8.1), например мягкая ось и ограничение пространства (3.1.8.7). См. мягкую ось и ограничение пространства и защиту (3.1.10.2).
3.1.9.5 охраняемое пространство (safeguarded space): Пространство, в котором действуют защитные устройства (3.1.10.2) или ограждение по периметру обеспечивает защиту.
Примечание 1 - Иногда это относится к пространству внутри периметра защиты.
Примечание 2 - Защищенное пространство может динамически изменяться.
3.1.9.6 опасная зона (hazard zone): Любое пространство внутри и/или вокруг механизмов, в котором человек может подвергнуться опасности (3.1.6.1).
[ИСО 12100:2010, статья 3.11]
3.1.9.7 зона задач (task zone): Любое заранее определенное пространство внутри и/или вокруг роботизированной системы (3.1.1.3), в котором персонал может выполнять определенную деятельность.
3.1.9.8 зона обнаружения (detection zone): Зона, в которой указанный образец обнаруживается чувствительным защитным оборудованием (3.1.10.5).
Примечание 1 - Зона обнаружения может быть точкой, линией, плоскостью или пространством.
Примечание 2 - Заимствовано из МЭК 61496-1:2004, определение 3.4.
[ИСО 13855:2010, статья 3.1.8, модифицирован путем добавления слова "чувствительный" перед фразой "защитное оборудование" и добавления "или пробела к примечанию 1]
3.1.9.9 опасная зона (hazard zone): Любое пространство внутри и/или вокруг механизмов, в котором человек может подвергнуться опасности (3.1.6.1).
[ИСО 12100:2010, статья 3.11]
3.1.9.10 зона задач (task zone): Любое заранее определенное пространство внутри и/или вокруг применения робота (3.1.1.4), в котором операторы (3.1.7.2) могут выполнять определенную деятельность.
3.1.9.11 расстояние разделения (separation distance): Кратчайшее допустимое расстояние между любой движущейся опасной частью применения робота (3.1.1.4) и любым оператором (3.1.7.2).
Примечание - Это значение может быть фиксированным или переменным.
3.1.10 Меры по снижению риска
3.1.10.1 защитная мера (protective measure): Мера, направленная на снижение риска, реализована:
разработчиком (безопасная конструкция, меры безопасности и дополнительные меры защиты, информация по использованию); и/или
пользователем (3.1.7.3) [организация: безопасные рабочие процедуры, надзор, системы разрешений на работу; обеспечение и использование дополнительных мер безопасности (3.1.10.2); использование средств индивидуальной защиты; обучение].
[ИСО 12100:2010, статья 3.19]
3.1.10.2 охрана (safeguarding): Защитная мера, использующая меры безопасности (3.1.10.2) для защиты людей от опасностей (3.1.6.1), которые не могут быть устранены разумно, или от рисков, которые не могут быть в достаточной степени уменьшены с помощью изначально безопасных проектных мер
[ИСО 12100:2010, статья 3.21]
3.1.10.3 охранение (safeguard): Ограждения или защитные устройства (3.1.10.4).
Примечание - Защитные устройства (3.1.10.4) включают широкий диапазон средств, с помощью которых можно уменьшить или контролировать риски, например:
устройства блокировки для охраны;
чувствительное защитное оборудование (SPE) (3.1.10.5);
функция безопасности (3.1.8.1), например ограничивающие устройства (3.1.9.4), представленные мягкой осью и ограничивающие пространство (3.1.8.7);
ограничивающие устройства (3.1.9.4);
устройство контроля ограниченного движения.
[ИСО 12100:2010, статья 3.26, модифицирован добавлением примечания 1]
3.1.10.4 защитное устройство (protective device): Средства защиты (3.1.10.2), кроме ограждения.
Примечание - Примеры типов защитных устройств приведены в 3.28.1-3.28.9 ИСО 12100:2010.
[ИСО 12100:2010, статья 3.18, модифицирован адаптацией примечания 1]
3.1.10.5 чувствительное защитное оборудование; SPE (sensitive protective equipment, SPE): Оборудование для обнаружения людей или их частей, которое подает соответствующий сигнал на систему контроля для снижения риска для обнаруженных лиц.
[ИСО 12100:2010, статья 3.28.5, модифицирован удалением примечания 1]
3.1.11 Верификация и валидация
3.1.11.1 валидация (validation): Подтверждение посредством предоставления объективных свидетельств того, что требования для конкретного предполагаемого использования или применения (3.1.1.6) выполнены.
Примечание - Валидация определяет, выполняет ли спецификация то, что было задумано, например: что указанный предел приемлем для его цели. Валидация включает функциональное тестирование.
[ИСО 9000:2015, статья 3.8.13, модифицирован добавлением примечания 1]
3.1.11.2 верификация (verification): Подтверждение посредством предоставления объективных доказательств того, что указанные требования выполнены.
Примечание - Проверка определяет, соответствует ли конструкция ее спецификации, например: посредством обзора, измерения, анализа или проверки.
[ИСО 9000:2015, статья 3.8.12, модифицирован добавлением примечания 1]
3.2 Сокращения
Сокращение | Термин | Определение или ссылка |
3P | 3 позиции <трехпозиционное разрешающее устройство> | 5.2.9.1, 5.5.3.2, 5.5.3.3, приложение C, приложение G |
Cat | Категория | 5.3.3, приложение C, таблица D.1 |
Class | Классификация | 5.1.17, таблица 1, 5.2.8.2.2, 5.2.9.1, 5.3.3, 5.7.1, 5.9.1, перечисление h), 7.5.12.7, приложение C, таблица C.1, приложение E, приложение G |
EMC | Электромагнитная совместимость | 5.3.7, приложение G |
EMI | Электромагнитная интерференция | 5.3.7, приложение A, приложение G |
Максимальное усилие на манипулятор | 5.1.17, перечисление c), таблица 1, приложение E | |
HFT | Отказоустойчивость оборудования | 5.3.3, 7.5.12.1, приложение C, таблица D.1, приложение G |
HGC | Ручное управление | Введение, 3.1.1.2, 5.2.9.1, 5.5.1.2, 5.10.2, приложение C, приложение G |
M | Общая масса движущихся частей манипулятора | 5.1.17, таблица 1 |
Эффективная масса полезной нагрузки для применения робота (указанная максимальная полезная нагрузка) | 5.1.17, таблица 1 | |
Эффективная масса движущихся частей манипуляторв | 5.1.17, таблица 2 | |
Эффективная масса роботизированной системы в зависимости от положения и движения робота с заданной максимальной полезной нагрузкой, вычисляемая по формуле | 5.1.17, таблица 2 | |
Среднее количество ежегодных операций | Приложение D | |
Средняя вероятность опасного отказа в час | 5.3.3, 7.5.12, таблица D.1 | |
PFL | Ограничение мощности и силы | Введение, 3.1.1.2, 5.2.9.1, 5.4.3.3, 5.10.2, 5.10.4, приложение C, приложение G |
PL | Уровень эффективности | 5.3.3, приложение C |
Уровень эффективности a | Приложение C, таблица C.2 | |
Уровень эффективности b | Приложение C | |
Уровень эффективности c | Приложение C, таблица C.2 | |
Уровень эффективности d | 5.3.3, приложение C, приложение D, приложение G | |
Уровень эффективности e | 5.3.3, приложение C | |
SIL | Уровень полноты безопасности | 5.3.3, 7.5.12.1, приложение C, приложение D |
SIL 1 | Уровень полноты безопасности 1 | Приложение C |
SIL 2 | Уровень полноты безопасности 2 | 5.3.3, приложение C, приложение G |
SSM | Контроль скорости и разделения | Приложение C |
SPE | Чувствительное защитное оборудование | 3.1.10.2, 3.1.10.5, приложение C |
TCP | Центральная точка инструмента | 3.1.2.11, 3.1.4.4, 5.1.9, 5.1.14, 5.1.16, 5.1.17, 5.5.2.1, 5.5.2.2, 7.5.3.d), 7.5.12.2, приложение G |
4 Оценка риска
Изготовитель роботов должен провести оценку риска в соответствии с ИСО 12100.
Примечание 1 - ИСО 12100 содержит требования и руководство по идентификации опасностей и снижению рисков.
Примечание 2 - Приложение A содержит список тех опасностей, которые могут быть связаны с роботами. Требования к роботизированной системе, применению робота и роботизированной ячейке приведены в ИСО 10218-2:2021.
5 Требования к конструкции и защитные меры
5.1 Требования к конструкции робота
5.1.1 Общие положения
Робот должен быть спроектирован в соответствии с принципами ИСО 12100 с учетом выявленных опасностей.
Информация, касающаяся защитных мер, приведена в разделе 7.
Примечание - Анализ видов и последствий отказов рассмотрен в МЭК 60812 и других стандартах.
5.1.2 Материалы, механическая прочность и конструкция
5.1.2.1 Общие сведения
Роботы должны быть спроектированы и сконструированы таким образом, чтобы предотвращать опасные ситуации, возникающие в результате их отказа из-за усталости и износа. При проектировании и изготовлении необходимо учитывать жизненный цикл предполагаемого использования (например, транспортирование, установка, условия эксплуатации и техническое обслуживание в соответствии с информацией по применению).
5.1.2.2 Материалы
Материалы, используемые для изготовления робота:
a) должны быть выбраны в соответствии с использованием робота по назначению (например, устойчивость к коррозии, истиранию, ударам, температурам, усталости, хрупкости, старению);
b) не должны ставить под угрозу безопасность или здоровье людей;
c) не должны быть токсичными при всех разумно предсказуемых условиях использования;
d) не должны быть склонными к хрупкому излому, чрезмерной деформации или выделению токсичных или легковоспламеняющихся паров;
e) должны сохранять свои свойства в разумно предсказуемом диапазоне климатических и эксплуатационных условий, включая колебания температуры или ее резкие изменения.
При использовании жидкостей оборудование должно быть сконструировано и построено таким образом, чтобы предотвратить риски, связанные с наполнением, использованием, выделением или сливом.
5.1.2.3 Механическая прочность
Робот должен быть спроектирован и сконструирован так, чтобы:
- выдерживать перегрузку при статических испытаниях без остаточной деформации или явного дефекта, при этом в расчетах на прочность минимальный коэффициент статических испытаний должен составлять 1,25;
- без сбоев пройти динамические испытания с использованием максимальной полезной нагрузки агрегата, умноженной на коэффициент динамических испытаний, при этом коэффициент динамических испытаний должен быть не менее 1,1.
Испытания необходимо проводить на максимальной скорости. Если может быть запрограммировано одновременное движение, то испытания необходимо проводить при наименее благоприятных условиях.
5.1.2.4 Механическая конструкция
Роботы должны быть спроектированы и сконструированы таким образом, чтобы обнаженные острые края, острые углы и опасные выступы были уменьшены, насколько это практически возможно. Механизмы, обеспечивающие движение, должны быть установлены или смонтированы внутри рамы робота так, чтобы они были недоступны. Воздействие опасностей, вызванных такими компонентами, как валы двигателя, шестерни, приводные ремни или соединения, которые не защищены встроенными крышками (например, панель над коробкой передач), должно быть предотвращено либо фиксированными ограждениями, либо подвижными ограждениями в соответствии с ИСО 14120. Системы фиксации фиксированных ограждений, которые снимаются для обычных операций обслуживания, должны оставаться прикрепленными к роботу или ограждению. Подвижные ограждения должны быть заблокированы при рискованных движениях таким образом, чтобы опасные функции машины прекращались до того, как они становились реальными.
Конструкция должна обеспечивать предотвращение ошибок при установке или переустановке определенных деталей, которые могут быть источником риска. Если это невозможно, информация по использованию должна быть указана, по крайней мере, на самих частях и/или их корпусах.
5.1.3 Погрузочно-разгрузочные работы, подъем и транспортирование
Опасности из-за резких движений или неустойчивости, таких как опрокидывание и опрокидывание во время транспортирования, подъема и манипуляции с роботом или его составными частями, должны быть предотвращены до тех пор, пока с ними обращаются в соответствии с инструкциями по эксплуатации.
Для подъема и обработки предполагаемого груза должны быть предусмотрены одна или несколько из следующих мер:
соответствующая конструкция;
дополнительные опорные элементы;
надлежащая упаковка.
Должны быть предусмотрены условия для перемещения и подъема робота и связанных с ним компонентов, а помещение должно быть достаточным для перемещения предполагаемого груза.
Пример - Подъемные крюки, рым-болты, резьбовые отверстия, карманы для вилок.
Для роботов и любых частей робота, используемых в раздельных операциях, вес которых не превышает 23 кг и предназначенных для обслуживания одним человеком, может быть достаточно инструкции по безопасному транспортированию, подъему и обработке.
Примечание - См. ЕН 1005-2 для вариантов ручных операций с механизмами и составными частями машин.
5.1.4 Упаковка
Робот и любая часть робота, предназначенные для раздельного обращения, должны быть упакованы или спроектированы таким образом, чтобы обеспечить обращение без травм людей и хранение без повреждений робота.
5.1.5 Устойчивость
Роботы должны быть устойчивыми для установки, эксплуатации, использования, разборки и демонтажа, чтобы предотвратить опрокидывание и падение за счет специального крепления для надежного крепления робота и его компонентов (например, манипулятора, панели управления, мобильного пульта).
5.1.6 Температурные и пожарные риски
Конструкция робота должна быть такой, чтобы температуры доступных поверхностей соответствовали стандартам серии ИСО 13732.
При наличии опасностей возгорания или перегрева следует применять принципы проектирования ИСО 19353.
5.1.7 Специальное оборудование
Необходимо обеспечить поставку или доступность специального оборудования и аксессуаров, позволяющих регулировать, обслуживать и безопасно использовать робота.
Примечание - Обычное оборудование на рабочем месте, например лестницы, гаечные ключи, отвертки, шестигранные ключи, не считают специальным оборудованием.
5.1.8 Удержание позиции
Если потеря мощности может привести к опасности вследствие силы тяжести, воздействующей на манипулятор, робот должен иметь средства для поддержания положения робота без привода (например, тормоза, штифты или другие технологии).
Если требуется в целях безопасности, то:
- при удержании должны быть использованы соответствующие расчетные допуски в соответствии с 5.1.2, а также
- должен быть предусмотрен метод проверки средств удержания положения, если отказ средств удержания положения может вызвать опасную ситуацию, например неожиданное движение манипулятора.
Примечание 1 - См. 5.3.4 для обнаружения отказа или ошибки, когда удержание положения обеспечено функцией безопасности.
Примечание 2 - См. 5.1.10 о потере или изменении мощности.
5.1.9 Вспомогательная ось (оси)
Вспомогательная(ые) ось(и) - это дополнительное средство.
Средства удержания положения, снабженные вспомогательной(ыми) осью(ями), должны соответствовать 5.1.8.
Вспомогательная(ые) ось(и) может (могут) быть частью общего кинематического решения робота, обеспечивая согласование с кинематикой манипулятора.
Когда движение вспомогательной оси влияет на скорость TCP в ручном режиме пониженной скорости, требования пониженной скорости (5.5.2.1) следует применять к вспомогательной(ым) оси(ям).
Если для робота предусмотрена функция безопасности с контролируемой скоростью, эта функция безопасности (см. 5.5.2.2) также должна быть предусмотрена для вспомогательной(ых) оси(ей).
Ограничение оси должно быть обеспечено в соответствии с 5.7, когда вспомогательная(ые) ось(и) включена(ы) в три оси наибольших (максимальных) движений смещения.
5.1.10 Потеря или изменение мощности
Потеря или изменение электрического, гидравлического или пневматического питания робота не должны приводить к возникновению опасной ситуации.
Повторное включение питания не должно приводить:
- к любому(ым) опасному(ым) движению(ям), или
- изменению параметров.
Робот должен соответствовать требованиям ИСО 14118, чтобы предотвратить неожиданный пуск.
Примечание - Требования к электропитанию см. в МЭК 60204-1, к гидравлике в ИСО 4413 и к пневматике в ИСО 4414.
5.1.11 Неисправность компонентов
Компоненты робота должны быть спроектированы, сконструированы, закреплены или содержаться в соответствии с 5.1.2, чтобы риски, вызванные поломкой, ослаблением или высвобождением, включая риски, связанные с накопленной энергией, были снижены до приемлемого уровня.
5.1.12 Опасная энергия
Накопленная энергия не должна вызывать опасных ситуаций. Должны быть предусмотрены средства предотвращения неконтролируемого или опасного выброса накопленной энергии. Если опасная энергия является потенциальной (например, пружинный балансир, газовый балансир), робот должен иметь средства для его фиксации в том положении, которое может быть как включенным, так и обесточенным.
Робот должен быть оборудован средствами, позволяющими изолировать его от всех источников энергии. Это средство должно быть спроектировано таким образом, чтобы исключить случайное срабатывание, или оно должно быть защищенным.
Безопасный выпуск или локализация должны быть обеспечены в соответствии с ИСО 14118.
Должна быть прикреплена этикетка, указывающая на опасность накопленной энергии.
Если оси робота могут перемещаться под действием силы тяжести, следует применять средства либо для предотвращения движения оси, либо для обеспечения того, чтобы результирующие движения могли инициироваться и приводить к обесточенному положению контролируемым образом. Функции безопасности для удержания положения (см. 5.1.8) могут быть предусмотрены для предотвращения неконтролируемого или опасного высвобождения накопленной энергии.
Примечание 1 - Опасная энергия может принимать разные формы, например: кинетическая, гравитационная, электрическая, пневматическая, гидравлическая, термическая, химическая. Источники этих энергий иногда можно легко идентифицировать. Однако часто источники скрыты или неочевидны, например: аккумуляторы, конденсаторы, батареи, пружины, противовесы, маховики, тепло как результат трения или других реакций.
Примечание 2 - Возможности энергосбережения, например рекуперация или регенерация энергии на месте у робота или обратно к местной электросети, могут быть источником накопленной энергии.
Примечание 3 - В настоящем стандарте не рассмотрены опасности, связанные с ядерной, потенциально взрывоопасной средой и радиацией. См. раздел 1.
Примечание 4 - Предотвращение движения оси может быть обеспечено прочной фиксацией болтами, удерживающими скобами с достаточным расчетным запасом и т.д.
Примечание 5 - На рисунке 1 показан пример запасенной энергии в пружинном балансировщике. Опасная ситуация может возникнуть, когда двигатель снят, даже если питание робота отключено. После освобождения робота его неожиданное движение из-за энергии пружинного балансира может вызвать травму, например дробление, сковывание движений.
 |
1 - пружинный балансир; 2 - снятие мотора; 3 - направления движения
Рисунок 1 - Пример запасенной энергии в пружинном балансировщике
5.1.13 Электрические, пневматические и гидравлические части
Электрические части должны соответствовать требованиям МЭК 60204-1.
Пневматическое оборудование должно соответствовать требованиям ИСО 4414.
Гидравлическое оборудование должно соответствовать требованиям ИСО 4413.
Примечание 1 - Требования, относящиеся к конкретным узлам и компонентам, см. в соответствующих стандартах МЭК или ИСО, например: МЭК 60269, МЭК 60947, ИСО 13850.
Электрические, гидравлические и пневматические разъемы должны быть выбраны таким образом, чтобы предотвратить ошибочное подключение, когда это может привести к опасной ситуации. Если это невозможно, соединители должны быть помечены, чтобы уменьшить вероятность ошибочного соединения.
Примечание 2 - См. МЭК 60204-1, 13.4.5, относительно требований к комбинациям вилки и розетки.
Электрические, гидравлические и пневматические соединители, которые могут представлять опасность в случае их разъединения или разрыва, должны быть спроектированы и реализованы таким образом, чтобы предотвратить непреднамеренное разъединение.
5.1.14 Настройка центральной точки инструмента (TCP)
Если настройка TCP необходима для обеспечения функции безопасности, должна быть возможность ввода настройки TCP в соответствии с 5.3.5.
Невозможность ввести параметр TCP приведет к предупреждению о необходимости ввода значения. После ручного сброса предупреждения программа может продолжаться и последующие предупреждения не требуются.
Диапазон допустимых значений должен быть ограничен.
Пример - Если робот имеет функцию безопасности с отслеживанием скорости TCP, может потребоваться настройка смещения TCP.
Примечание 1 - Параметры TCP - это те размерные значения, которые определяют расположение TCP относительно механического интерфейса, чтобы можно было управлять TCP, например скорость, положение.
Примечание 2 - Если робот и вспомогательные оси работают в координации друг с другом, каждая отдельная ось может двигаться с разной скоростью, включая вспомогательную ось.
5.1.15 Настройка центральной точки инструмента (TCP)
Если настройка полезной нагрузки необходима для обеспечения функции безопасности, должна быть возможность ввода настройки полезной нагрузки в соответствии с 5.3.5.
Неспособность ввести полезную нагрузку приведет к предупреждению о необходимости ввода значения. После ручного сброса предупреждения программа может продолжаться и последующие предупреждения не требуются.
Диапазон допустимых значений должен быть ограничен.
5.1.16 Информационная безопасность
Должна быть проведена оценка информационной безопасности робота. Если оценка выявила, что угроза может привести к риску(ам) (безопасности), должны быть предусмотрены меры по поддержке информационной безопасности. Эти меры должны включать средства предотвращения несанкционированного доступа к роботу, его оборудованию, программному обеспечению, к данным конфигурации и прикладной программе промышленного робота.
Средства предотвращения несанкционированного доступа могут включать предоставление следующего:
- возможность отключить доступ к портам связи, например порт TCP/UDP;
- возможность изменить номер порта TCP/UDP, например логическая связь;
- аутентифицированная защита конфигурации безопасности;
- возможность менять логины и пароли по умолчанию;
- использование криптографических протоколов.
Примечание 1 - Для получения дополнительной информации см. ISO/TR 22100-4:2018.
Примечание 2 - Для получения информации и требований о безопасности систем промышленной автоматизации и управления см. серию стандартов МЭК 62443 и IEC TR 63074:2019.
5.1.17 Класс робота
Роботы подразделяют на два класса в соответствии с таблицей 2 по максимальной производительности манипулятора без ограничения функциями управления роботом или функциями безопасности на основе следующих значений:
a) максимально достижимая скорость TCP;
Примечание 2 - Применения робота, в которых перемещается основание, могут включать установку манипулятора (включая его основание) на мобильной платформе, гусенице, портале и т.д.
Роботы могут быть классифицированы как роботы класса II без проведения испытаний в соответствии с приложением E. В этом случае робот должен соответствовать требованиям роботов класса II, включая требования функциональной безопасности в соответствии с 5.3.
Таблица 1 - Класс робота
Класс робота | Общая масса манипулятора , кг | Максимальная сила* на манипулятор [N] | Максимальная скорость, мм/с |
I | 10 кг и менее | 50 и менее | 250 мм/с и менее |
II | Более 10 кг | Более 50 | более 250 мм/с |
Примечания 1 - общая масса движущихся частей манипулятора. См. приложение E для методологии испытаний . Если предусмотрено несколько манипуляторов, определяют для каждого манипулятора. 2 См. ссылку [65] FP 0317 (исследование в Майнце) для получения максимальной силы 50 Н на каждый манипулятор ( ). * Максимальное усилие соответствует минимальной площади контакта манипулятора 0,5 см [65]. В [65] FP 0317 (исследование в Майнце): третий квартиль из 29 частей тела, которые рассматривались (кроме головы и шеи), исследование FP 0317 показывает, что сила около 50 Н ниже начала боли, независимо от давления (за исключением игл и ножей). Следовательно, предел силы в 50 Н может применяться в качестве общей границы между роботами класса I и II. | |||
5.2 Управление роботом
5.2.1 Общие сведения
Системы управления должны быть спроектированы таким образом, чтобы предсказуемая человеческая ошибка во время работы не приводила к опасным ситуациям.
5.2.2 Защита от внезапного пуска
Средства предотвращения внезапного пуска должны соответствовать приведенным в ИСО 14118. Функции управления должны быть реализованы, а устройства управления, при их наличии, должны быть расположены определенным образом.
Внезапный запуск из-за команды пуска, являющейся результатом отказа или внешнего воздействия на систему управления, с помощью соответствующей системы управления должен предотвращаться согласно требованиям 5.3, 5.4 и 5.5.
Внезапный запуск из-за команды пуска, сгенерированной несвоевременным воздействием на управление пуском или другие части машины, такие как датчик или элемент управления мощностью, должен предотвращаться функцией блокировки перезапуска в соответствии с 5.5.1.2.
Внезапный запуск из-за восстановления электропитания после прерывания должен быть предотвращен функцией блокировки пуска в соответствии с 5.5.1.1.
5.2.3 Сингулярность
Движения, определенные в декартовом пространстве, которые проходят вблизи сингулярностей, могут вызывать непредусмотренные скорости и движения осей. До появления таких особенностей робот должен выполнить одно из следующих действий:
a) генерировать повторяемое движение и скорость при прохождении сингулярности;
b) останавливать выполнение целевой программы без дальнейшего движения, выдать предупреждение, а для восстановления после остановки перезапустить целевую программу вручную;
c) генерировать звуковой или видимый предупреждающий сигнал и продолжать движение через сингулярность со скоростями, ограниченными в соответствии с пониженной скоростью (5.5.2.1).
Примечание - Риски из-за особенностей могут возникать в автоматическом режиме (5.2.8.1), когда активны возможности, используемые для включения совместных применений (5.12), и в ручном режиме (5.2.8.2).
5.2.4 Функции блокировки
Блокирующие устройства, связанные с ограждениями, должны соответствовать приведенным в ИСО 14119.
Примечание - См. 5.5.1 "Блокировка пуска и перезапуска".
5.2.5 Индикация состояния и предупреждающие устройства
Состояние робота должно быть четко указано, например: питание включено, обнаружена неисправность, режим (5.2.8), автоматическая работа в процессе, прямое управление (5.2.7.2), внешнее управление (5.2.7.3). Индикаторы должны соответствовать месту установки и требованиям МЭК 60204-1.
Предупреждающие устройства при наличии (например, звуковые и визуальные) должны соответствовать ИСО 12100, МЭК 60204-1 и МЭК 60073.
Примечание - МЭК 60073 содержит основные принципы и принципы безопасности для интерфейса человек-машина, маркировки и идентификации - это принципы кодирования для устройств индикации и исполнительных механизмов. В серии стандартов МЭК 61310 рассмотрена безопасность машинного оборудования с требованиями к индикации, маркировке и срабатыванию. Нормативные ссылки на серию стандартов МЭК 61310 приведены в МЭК 60204-1.
5.2.6 Маркировка
Устройства управления, индикаторы и дисплеи должны иметь маркировку, четко указывающую на их функцию, например: включение питания "|", отключение питания "O" в соответствии с МЭК 60204-1 и МЭК 60073-2. См. приложение F.
5.2.7 Единая точка управления
5.2.7.1 Общие сведения
Единая точка управления реализована одним из следующих способов:
- путем аутентификации связи, управляющей роботом, в соответствии с 5.1.16;
- в качестве функции безопасности согласно 5.3.
Одновременно принимают только один источник управления.
5.2.7.2 Прямое управление
Когда робот находится под прямым управлением, внешнее управление не должно допускать следующего (5.2.7.3):
a) инициирования движения робота;
b) программных изменений;
c) изменений конфигурации безопасности;
d) перехода управления на другой пост управления;
e) обновления управляющей программы.
Активация прямого управления всегда должна иметь приоритет над другими источниками управления. Активация прямого управления должна быть результатом преднамеренного воздействия на конкретное устройство управления на пульте управления.
Примечание - Информация о средствах управления роботом, включая мобильные пульты, приведена в 5.2.9.
5.2.7.3 Внешнее управление
Может быть обеспечена возможность внешнего управления. Если средства программирования не предоставляются в комплекте с роботом, так что требуются внешние средства (например, путем подключения к компьютеру), они должны быть рассмотрены как внешние средства управления.
Если предусмотрено прямое управление (5.2.7.2), в соответствии с 5.2.7.1 должно быть выполнено следующее:
a) на прямом управлении должны потребоваться преднамеренные действия для включения внешнего управления;
b) включение прямого управления должно приводить к немедленному отключению любого внешнего управления.
Примечание - Информацию о средствах управления роботом, включая обучающие подвески, см. в 5.2.9.
5.2.8 Режимы
5.2.8.1 Автоматический
Робот должен иметь автоматический режим. В автоматическом режиме робот должен выполнить программу задач и соответствующие сконфигурированные функции безопасности должны быть активными. Любое обнаруженное условие остановки должно привести к остановке всех подвижных частей робота.
Автоматическая работа не начинается до тех пор, пока оператор не предоставит отдельного подтверждения.
5.2.8.2 Ручной
5.2.8.2.1 Общие сведения
Движения робота должны быть возможны только в соответствии с 5.2.9, при этом средства управления робота являются единой точкой управления (5.2.7) робота.
5.2.8.2.2 Пониженная скорость
Робот должен иметь ручной режим пониженной скорости для обучения, программирования и проверки программ. Это требование может быть исключено для роботов класса I, которые предназначены исключительно для применений робота, в которых можно предвидеть, что обучение, программирование и проверка программы не приведут к опасной ситуации.
Движение робота должно быть возможным только во время срабатывания разрешающего устройства в соответствии с 5.5.3 и с пониженной скоростью согласно 5.5.2.1.
Автоматическая работа должна быть запрещена, когда робот находится в ручном режиме.
Примечание - Ранее ручной режим пониженной скорости также назывался ручным понижением скорости, T1 или обучением.
5.2.8.2.3 Высокоскоростной
Робот может иметь высокоскоростной ручной режим, в котором скорость может быть больше, чем уменьшенная скорость. Скоростной ручной режим предназначен только для проверки запрограммированных задач (см. ИСО 10218-2).
При наличии скоростного ручного режима робот должен иметь:
a) средство выбора высокоскоростного ручного режима в соответствии с 5.2.8.2.3;
b) средство для ручного увеличения скорости в несколько этапов, начиная с настройки пониженной скорости, которая может составлять 250 мм/с или ниже;
c) отображение фактической скорости;
d) активную контролируемую скорость в соответствии с 5.5.2.2;
e) отдельное управление пуском/остановкой в сочетании с разрешающим устройством в соответствии с 5.5.3;
f) ограничение скорости не выше настройки пониженной скорости для следующих ситуаций:
- при выборе или включении ручного скоростного режима,
- когда разрешающее устройство в соответствии с 5.5.3 повторно запускается путем помещения разрешающего устройства в центральное разрешенное положение после того, как оно было отпущено или полностью сжато;
g) отдельное преднамеренное действие для восстановления более высокой скорости, которая выбрана ранее, если разрешающее устройство отпускается на 5 мин или более;
h) выходной сигнал функции безопасности с контролируемой скоростью, указывающий на то, что робот находится в высокоскоростном ручном режиме.
Робот может обладать одной или обеими из следующих возможностей:
- средство отключения скоростного ручного режима;
- средства для установки предела контролируемой скорости на значение 250 мм/с или ниже.
Примечание - Этот дополнительный высокоскоростной ручной режим ранее известен как ручной высокоскоростной или T2.
5.2.8.3 Выбор, активация и изменение режима работы
Выбор рабочего режима должен требовать преднамеренного действия, например клавишного переключателя, выбора на сенсорном экране.
Примечание 1 - Выбор режима работы не считают функцией безопасности.
Выбранный режим должен быть:
- четко идентифицируемым;
- однозначно указанным;
- видимым или отображаемым.
Выбор режима может быть ограничен средствами защищенного доступа (например, ключом, системами контроля доступа или кодами доступа), что ограничивает использование некоторых режимов или функций робота.
Переключение между любым режимом должно приводить к защитной остановке (5.4.3). Начало движения должно соответствовать требованиям блокировки пуска и повторного пуска (5.5.1).
Если изменение режима приводит к изменению активных мер по снижению риска:
a) активацию выбранного режима следует рассматривать как функцию безопасности;
b) одновременно должен быть активен только один рабочий режим;
c) каждый режим должен иметь необходимые меры по снижению риска, действующие для этого режима;
d) активация выбранного режима работы не должна приводить к движению робота или другим опасностям.
Примечание 2 - Многие роботы реализуют ручной режим, так что входы робота для защиты периметра неактивны в ручном режиме (для разрешения входа), в то время как защита периметра будет активна в автоматическом режиме.
Для индикации активного режима может (могут) быть предусмотрен(ы) дополнительный(е) выход(ы). Если это предусмотрено для целей, связанных с безопасностью, выходные данные функции безопасности должны соответствовать требованиям 5.3.
Примечание 3 - Символы для обозначения режима показаны в приложении F.
5.2.9 Средства управления роботом
5.2.9.1 Общие сведения
Робот должен иметь средства для контроля, управления, программирования/обучения, настройки и устранения неполадок робота, например: мобильный пульт или другой пульт (станции) управления. Должно быть предусмотрено как минимум одно из следующих средств:
a) пульт управления или мобильный пульт;
b) возможность внешнего управления и соответствующее соединение (проводное или беспроводное).
Каждая станция управления или мобильный пульт должны иметь устройство аварийной остановки в соответствии с 4.3.5 ИСО 13850:2015 для запуска функции аварийной остановки в соответствии с 5.4.2.
Любой мобильный пульт, который может инициировать движение или вызывать движение(я), должен иметь разрешающую функцию и разрешающее устройство 3P в соответствии с 5.5.3.
Для роботов класса I в соответствии с 5.1.17, в которых их максимальная сила и скорость ограничены изначально безопасной конструкцией:
- устройство включения 3P не требуется, а также
- должен быть предусмотрен вход функции безопасности для интеграции внешнего устройства включения 3P.
Роботы класса I должны быть спроектированы таким образом, чтобы прогнозируемые задачи робота (например, техническое обслуживание, устранение неисправностей и другие задачи) могли быть безопасно выполнены без устройства включения 3P, если это невозможно, то устройство включения 3P должно быть предоставлено с роботом.
Примечание 1 - Переносные блоки (подвески), связанные с роботом и имеющие возможность только визуализировать параметры робота, не считают станциями управления или мобильными пультами.
Мобильные пульты и панели управления должны соответствовать МЭК 61310-1:2007, МЭК 61310-2:2007 и МЭК 61310-3:2007.
Визуальный сигнал на пульте управления должен указывать на активное состояние пульта управления, например: световой индикатор на панели управления или предупреждение на мобильном пульте.
Для роботов с возможностью внешнего управления станции управления (включая мобильные пульты), поставляемые с роботом, должны указывать, когда внешнее управление активно.
Если станции управления установлены на роботе-манипуляторе или внутри него, следует применять одно или несколько из следующих средств снижения риска:
- ручное управление (HGC) в соответствии с 5.10.2;
- ограничение мощности и усилия (PFL) в соответствии с 5.10.4.
Примечание 2 - HGC (5.10.2) можно комбинировать с PFL (5.10.4).
Примечание 3 - Требования к единой точке управления, прямому управлению и внешнему управлению приведены в 5.2.7.
5.2.9.2 Мобильный(е) пульт(ы)
Мобильные пульты могут иметь фиксированное соединение, например: фиксированный прикрепленный кабель к роботу или съемное соединение (съемный кабель или беспроводное соединение в соответствии с 5.2.9.3).
Масса и размер мобильных пультов не должны вызывать у пользователей утомление и дискомфорт, возникающие при использовании по назначению.
Примечание - В ЕН 1005-5 приведено руководство по оценке работы с деталями машин массой менее 3 кг; ЕН 1005-2 - по оценке работы с частями машин массой, равной или превышающей 3 кг, на расстояниях менее 2 м.
Мобильные пульты должны быть снабжены следующими средствами или инструкциями:
- по размещению или укладке для сведения к минимуму возможности повреждения, которое может привести к опасности;
- укладке кабеля, если применимо, для уменьшения опасности запутывания и спотыкания.
5.2.9.3 Бескабельный или съемный мобильные пульт(ы)
Мобильные пульты, у которых отсутствуют кабели, подключаемые к роботу, или у которых кабель может быть отсоединен, должны отвечать следующим требованиям:
a) должна быть предусмотрена визуальная индикация, показывающая, что мобильный пульт активен, например на дисплее мобильного пульта;
b) должна быть предусмотрена визуальная индикация, указывающая, к какому роботу подключен мобильный пульт (например, на дисплее мобильного пульта);
c) потеря связи, связанная с безопасностью, должна привести к защитной остановке для всех управляемых роботов в ручном(ых) режиме(ах);
d) восстановление связи, предназначенной для безопасности, не должно возобновлять движение робота без отдельного преднамеренного действия;
e) их устройство(а) аварийной остановки должно(ы) соответствовать ИСО 13850:2015, 4.3.8;
f) должны быть предусмотрены однозначные средства для подключения и отключения управления роботом от мобильного пульта (например, положительное действие со стороны оператора);
g) связанная с безопасностью беспроводная связь (например, радио, инфракрасная) мобильных пультов должна соответствовать МЭК 62745, а также
h) должны быть предусмотрены средства для предотвращения путаницы между активными и неактивными устройствами аварийной остановки (например, укладка или инструкции по размещению).
5.2.10 Средства управления роботом
Робот не должен начинать автоматическую работу до тех пор, пока не будет предоставлено отдельное подтверждение от оператора.
Робот должен обеспечивать средства, с помощью которых можно:
- запускать автоматический режим работы с устройства управления, отличного от мобильного пульта.
Примечание 1 - Эта функция может быть достигнута с помощью блокировки перезапуска (см. 5.5.1.2);
- предотвратить пуск автоматической работы робота только с помощью мобильного пульта.
Примечание 2 - Это может быть обеспечено путем интеграции (ИСО 10218-2) с использованием внешнего входа для робота.
5.3 Функции безопасности
5.3.1 Общие сведения
Системы управления, связанные с безопасностью (электрические, гидравлические, пневматические, механические и программные), должны соответствовать требованиям 5.3 и приложения C.
В информации по использованию должна быть указана связанная с безопасностью система управления всеми функциями безопасности робота в соответствии с приложением D.
Примечание 1 - В таблице D.1 показан пример формата для предоставления необходимой информации.
Роботу могут быть предоставлены возможности и функции безопасности в соответствии с 5.10 для того, чтобы обеспечить выполнение совместных задач согласно ИСО 10218-2. Дополнительные возможности (см. приложение I) могут быть предоставлены (см. приложение C).
Примечание 2 - Системы управления, связанные с безопасностью, также могут называться SRP/CS (части систем управления, связанные с безопасностью) или SCS (системы управления, связанные с безопасностью).
5.3.2 Стандарты функциональной безопасности
Связанные с безопасностью части системы управления (SRP/CS или SCS) должны быть спроектированы в соответствии:
- с ИСО 13849-1 "Элементы систем управления, связанные с безопасностью. Общие принципы проектирования", или
- МЭК 62061 "Функциональная безопасность связанных с безопасностью электрических, электронных и программируемых электронных систем управления".
В ИСО 13849 и МЭК 62061 рассмотрена функциональная безопасность с использованием похожих, но разных методов.
5.3.3 Эффективность
Минимальные показатели функциональной безопасности для функций безопасности должны быть как минимум одними из следующих:
- уровень полноты безопасности SIL 2, отказоустойчивость оборудования HFT=1, время работы не менее 20 лет в соответствии с МЭК 62061:2015, или
Другой критерий может быть предусмотрен для конкретного класса робота (5.1.17, таблица 2) и конкретной функции безопасности (таблица C.2) в соответствии с приложением C.
5.3.4 Обнаружение отказов или неисправностей
Любой отказ системы управления, связанный с безопасностью, или обнаруженный сбой функции, связанной с безопасностью, должен приводить к остановке категории 0 или 1 в соответствии с МЭК 60204-1. Запуск функции безопасности указывает на то, что функция безопасности работает должным образом, что не является отказом или неисправностью функции безопасности. Срабатывание функции безопасности должно приводить к определенному(ым) результату(ам) функции безопасности в соответствии с приложением С.
5.3.5 Параметризация функций безопасности
Роботу должны быть предоставлены средства и возможности для программной параметризации прикладного программного обеспечения, связанного с безопасностью, и для разработки прикладного программного обеспечения, связанного с безопасностью.
Это следует рассматривать в качестве аспекта, связанного с безопасностью, как указано в ИСО 13849-1:2015, 4.6.4, или МЭК 62061:2015, 6.11.2.
Примечание - Надлежащая работа функции безопасности основана на правильной и надежной настройке связанных с безопасностью параметров, используемых в функции(ях) безопасности, особенно предназначенных для прикладного программного обеспечения, связанного с безопасностью.
Следовательно, интерактивные программные инструменты, как определено в МЭК 61508-4:2010, 3.2.10, не следует использовать.
Как только функция безопасности активирована, функция безопасности постоянно должна быть активной при включении питания.
Ручное(ые) изменение(я) параметров, связанных с безопасностью, требует(ют) перезапуска управления роботом после изменения(й). Параметры, связанные с безопасностью, не допускается изменять во время автоматического выполнения целевой программы.
Для конкретного параметра может быть сконфигурирован набор различных значений, и конкретное значение из другого набора может быть применено во время определенной части целевой программы.
Настройки параметров функции безопасности должны генерировать идентификатор (например, контрольную сумму), чтобы можно было идентифицировать изменения этих настроек.
Информация об активных настройках и конфигурации функций безопасности должна быть доступна для просмотра и документирования, например путем отображения результата идентификатора в пользовательском интерфейсе. Могут быть предоставлены дополнительные данные, например: информация о конфигурации, уполномоченный персонал, дата конфигурации.
5.3.6 Связь
Когда передачу данных используют для реализации функции безопасности, следует применять требования МЭК 61508-2:2010, 7.4.11.
Когда робот имеет внутреннюю сеть роботов, сеть следует рассматривать как сеть категории передачи 1 согласно таблице 2. Когда робот имеет внешнюю сеть, сеть должна рассматриваться как сеть категории передачи 2 или категории 3 в соответствии с таблицей 2. Характеристики категорий передачи (1, 2 или 3) описаны в таблице 2.
Примечание - Сеть категории передачи 1 обычно имеет фиксированное максимальное количество участников, в то время как сеть категории 2 является менее контролируемой сетью с незначительной возможностью для несанкционированного доступа.
Сеть категории передачи 3 имеет неустановленные свойства и высокий риск несанкционированного доступа (см. таблицу 3).
Таблица 2 - Внешняя сеть робота (требования к угрозам)
Категория | Повторение | Удаление | Вставка | Повторение | Искажение | Задержка | Подмена |
Cat. 1 | + | + | + | + | ++ | + | - |
Cat. 2 | ++ | ++ | ++ | + | ++ | ++ | - |
Cat. 3 | ++ | ++ | ++ | ++ | ++ | ++ | ++ |
Примечание - Термин "подмена" означает, что истинный источник сообщения не определен правильно. Например, сообщение от элемента, не связанного с безопасностью, неправильно идентифицируется как сообщение от элемента безопасности [МЭК 61508- 2:2010, 7.4.11.1]. - - угрозой можно пренебречь. + - угроза существует, но редко; достаточно слабых контрмер. ++ - угроза существует; требуются сильные контрмеры. | |||||||
Таблица 3 - Категории систем передачи данных
Категория передачи | Основные показатели |
1 | Предназначена для указанного и фиксированного максимального количества участников. Все свойства системы передачи установлены и неизменны в течение срока службы системы. Незначительная возможность для несанкционированного доступа |
2 | Свойства неизвестны, частично неизвестны или изменяются в течение срока службы системы. Ограниченные возможности для расширения группы пользователей. Указанная(ые) группа или группы пользователей. Незначительная возможность для несанкционированного доступа (сети являются доверенными). Периодическое использование недоверенных сетей |
3 | Свойства неизвестны, частично неизвестны или изменяются в течение срока службы системы. Не установлено несколько групп пользователей. Значительная возможность для несанкционированного доступа |
[МЭК 62280:2014, таблица B.1, первые 2 столбца] | |
Примечание 2 - Полное описание категорий связи см. в МЭК 62280:2014 или ЕН 50159:2010.
5.3.7 Электромагнитная совместимость (ЭМС)
Электромагнитная совместимость, связанная с безопасностью (т.е. невосприимчивость и излучение), должна соответствовать требованиям ИСО 13849-1 или МЭК 62061 по электромагнитным помехам (EMI) и электромагнитной совместимости.
Примечание - Это требование относится к функциональной безопасности. Другие требования ЭМС могут быть описаны другими стандартами.
5.4 Функции остановки робота
5.4.1 Общие сведения
Каждый робот должен иметь функцию защитной остановки, независимую функцию аварийной остановки и другую функцию остановки. Каждая функция остановки должна иметь возможность подключения внешних устройств.
Робот должен быть сконструирован таким образом, чтобы функции остановки имели приоритет над другими функциями управления. Когда запущена функция остановки, другие функции управления не должны разрешать движение робота до тех пор, пока не будет достигнуто условие остановки.
Показатели функциональной безопасности должны соответствовать 5.3.
В таблице 4 приведено сравнение функций остановки.
Таблица 4 - Сравнение функций остановки
Параметр | Другая остановка | Аварийная остановка | Защитная остановка |
Цель | Остановка, включение/выключение | Чрезвычайная ситуация | Охрана |
Эффект | Остановка робота или его опасных функций, затем отключение питания исполнительных механизмов | Удаление источников энергии от всех опасностей | Безопасное управление защищенными опасностями в соответствии с 5.4.3.1 (защитная остановка, общие) или 5.4.3.3 (контролируемая функция безопасности при остановке) |
Инициализация | Ручная | Ручная | Ручная, автоматическая или может быть автоматически инициирована функцией безопасности |
Категория остановки в соответствии с МЭК 60204-1 | 0 или 1 | 0 или 1 | 0, 1 или 2 |
Работоспособность системы управления, связанной с безопасностью | Не требуется | См. требование к производительности в C.2 | См. требования к производительности в 5.3 |
Сброс настроек | Не применимо | Только в ручном режиме | Ручной или автоматический. Может варьироваться в зависимости от каждой функции безопасности, инициирующей защитную остановку |
Частота использования | Частая | Нечасто | Переменная: от текущей (например, внутренние функции безопасности робота) до нечастых |
5.4.2 Аварийная остановка
5.4.2.1 Общие положения
Робот должен иметь одну функцию аварийной остановки категории 0 или 1 в соответствии с МЭК 60204-1. Функция(и) аварийной остановки и устройство(а) должны соответствовать ИСО 13850, а функция аварийной остановки должна:
a) иметь приоритет над всеми другими функциями управления роботом и остановками;
b) предотвращать все опасности в пределах области управления;
c) отключить приводную мощность от привода(ов) робота, а также
d) оставаться активной до сброса.
Функция аварийной остановки должна быть сброшена только ручным действием, которое не вызывает перезапуск после сброса, а только разрешает перезапуск.
Робот должен иметь возможность подключения внешнего входа аварийной остановки для использования роботизированной системой (см. ИСО 10218-2).
5.4.2.2 Пульт управления и пульт управления
Любой пульт управления или мобильный пульт, способный инициировать движение робота или другие опасные ситуации, должен иметь функцию аварийной остановки, инициируемую вручную.
5.4.2.3 Вход аварийной остановки
Любой вход функции безопасности для аварийной остановки должен оставаться активным после выключения и последующего включения питания.
Примечание - См. 5.2.2 для предотвращения неожиданного пуска.
5.4.2.4 Выход аварийной остановки
Если предусмотрен выход функции безопасности для аварийной остановки, выход должен оставаться в рабочем состоянии после выключения и последующего включения питания:
a) обнаружение неисправности должно соответствовать 5.3.6;
b) показатели функциональной безопасности должны соответствовать 5.3.
Примечание - См. 5.2.2 для предотвращения неожиданного пуска.
5.4.3 Защитная остановка
5.4.3.1 Общие положения
Робот должен иметь одну или несколько функций защитной остановки, которые могут быть инициированы внутренней функцией безопасности или внешним(и) защитным(и) устройством(ами).
Эта функция остановки должна:
a) вызывать остановку всего движения робота;
b) иметь категорию остановки 0, 1 или 2 согласно МЭК 60204-1;
c) приводить к контролируемой остановке согласно 5.4.3.3, если защитная остановка является остановкой категории 2 в соответствии с МЭК 60204-1;
d) всегда быть активной во всех режимах для роботов, поставляемых без разрешающего устройства (5.5.3).
Эта остановка может быть инициирована вручную или автоматически.
5.4.3.2 Выход защитной остановки
Если предусмотрен выход функции безопасности для защитной остановки, выход должен продолжать функционировать или генерировать сигнал защитной остановки при отключении питания.
5.4.3.3 Контролируемая остановка
Контролируемая остановка должна быть обеспечена, когда требуется предотвратить непреднамеренное движение робота после его остановки в соответствии с категорией 2 МЭК 60204-1:2016. Любое непреднамеренное движение робота в контролируемом состоянии покоя должно приводить к остановке категории 0 или 1 в соответствии с МЭК 60204-1:2016.
Контролируемая остановка должна быть обеспечена:
- для роботов с ручным управлением в соответствии с 5.10.2, без возможности PFL согласно 5.10.4;
- условий, когда мощность и сила ограничены функциями безопасности в соответствии с 5.10.4;
- случаев одновременного движения (5.6).
Если предусмотрена контролируемая остановка, робот должен иметь выходной сигнал функции безопасности, который сигнализирует о том, что остановка робота контролируется.
Эта функция безопасности также может быть инициирована внешними защитными устройствами.
5.4.4 Прочая остановка
Робот должен быть снабжен средствами для запуска функции остановки.
В случае активации эта функция остановки приводит к категории остановки 0 или 1 в соответствии с МЭК 60204-1:2016 и может быть использована как обычная функция остановки. Для данной функции остановки можно использовать вход защитной остановки, инициирующей остановку категории 0 или 1 (см. МЭК 60204-1).
Если станция управления имеет возможность инициировать движение или работу в автоматическом режиме, тогда она должна останавливать движение, т.е. осуществлять нормальную остановку.
Примечание 1 - Эта функция подготавливает робота к тому, чтобы его применение осуществило нормальную остановку.
Примечание 2 - Инициация автоматического режима работы определена в 5.2.10.
5.5 Другие функции безопасности
5.5.1 Блокировка пуска и перезапуска
5.5.1.1 Блокировка пуска
Блок управления роботом должен иметь функцию блокировки пуска, чтобы предотвратить автоматический пуск робота, когда робот находится в ручном режиме и подача энергии на робота включена или прерывается и восстанавливается.
Сброс блокировки пуска должен быть возможен только путем преднамеренного приведения в действие определенного устройства управления на пульте управления робота (например, электромеханической кнопки на панели управления или виртуальной кнопки на сенсорном экране в мобильном пульте).
5.5.1.2 Блокировка перезапуска
Система управления роботом должна иметь функцию блокировки перезапуска, чтобы предотвратить автоматический перезапуск робота следующим образом:
a) после изменения режима работы:
- из автоматического режима в ручной режим,
- с пониженного ручного режима на скоростной ручной режим и с высокоскоростного ручного режима к ручному режиму пониженной скорости,
- из режимов, описанных в 5.2.8, в другие режимы и наоборот, когда автоматический пуск может привести к опасности.
Примечание - Для изменения внутри режима на тот же режим с HGC блокировку перезапуска можно сбросить с помощью устройства удержания для пуска;
b) в ручном режиме после инициирования защитной остановки любой активированной защитной функцией.
Сброс блокировки перезапуска требует преднамеренного приведения в действие определенного устройства управления на станции управления робота (например, электромеханической кнопки на панели управления, виртуальной кнопки на сенсорном экране в мобильном пульте).
Устройство управления не должно быть таким, как устройство управления, используемое для сброса блокировки пуска (5.5.1.1).
5.5.2 Контроль ограничений скорости
5.5.2.1 Пониженная скорость
Робот должен иметь функцию ограничения скорости, позволяющую ограничивать скорость(и) до 250 мм/с или менее. При активной функции безопасности для понижения скорости скорость TCP и любой точки манипулятора не должна превышать 250 мм/с, включая влияние любой вспомогательной оси.
В качестве максимального предела должна быть предусмотрена возможность выбора скорости ниже 250 мм/с.
Показатели функциональной безопасности на пониженной скорости должны соответствовать 5.3. Эта функция безопасности должна быть активирована в ручном режиме пониженной скорости (см. 5.2.8.2.2).
Примечание - См. ИСО 10218-2, в котором указаны требования к пониженной скорости в ручном режиме для применения робота.
5.5.2.2 Контролируемая скорость
Контролируемая скорость должна соответствовать 5.3. Робот может иметь функцию(и) безопасности с контролируемой скоростью, позволяющую ограничивать скорость одного или нескольких из следующих механизмов:
- TCP;
- одна или несколько осей.
При активной функции безопасности с контролируемой скоростью скорость TCP и любой точки манипулятора не должна превышать установленную (контролируемую) скорость, включая влияние любой вспомогательной оси.
Если предусмотрена функция безопасности с контролируемой скоростью, робот может иметь возможность отключать функцию безопасности с контролируемой скоростью. Отключение этой функции должно быть частью параметризации в соответствии с 5.3.5.
5.5.3 Функция включения
5.5.3.1 Общие сведения
В ручном режиме должна быть активна разрешающая функция в соответствии с 5.7.1. Функция включения - это блокировка функции управления, активируемая вручную одним или несколькими разрешающими устройствами, которые:
a) при включении позволяет(ют) запускать работу робота с помощью отдельного элемента управления пуском, и
b) когда не включен(ы):
- запускает функцию остановки, и
- предотвращает начало работы машины.
Примечание - Функция включения разрешает движение робота, когда аварийная остановка не активирована, в ручном режиме.
5.5.3.2 Разрешающее устройство
Разблокирующее устройство должно быть разрешающим устройством управления типа 3P в соответствии с МЭК 60204-1:2016, 10.9, и МЭК 60947-5-8. Если в разрешающем устройстве использованы неэлектромеханические переключатели, они должны соответствовать эквивалентным требованиям.
Разблокирующие устройства, встроенные в мобильный пульт согласно 5.2.9, должны быть трехпозиционного (3P) типа с функциональностью в соответствии с 5.5.3.3.
Дополнительные разрешающие устройства 3P могут быть объединены или физически отделены (например, разрешающее устройство 3P ручного типа) от дополнительного мобильного пульта и должны работать независимо от любой другой функции или другого устройства управления движением.
5.5.3.3 Функциональность
Реализация разрешающего устройства должна иметь характеристики функциональной безопасности в соответствии с 5.3.
При постоянном удерживании в активированном по центру (ВКЛ) положении реализация активирующего устройства должна разрешать движение робота.
Примечание 1 - Для трехпозиционного (3P) разрешающего устройства центральное положение ON является активным положением, а OFF - освобожденным и сжатым положениями.
Разрешающее устройство должно обладать следующими функциональными возможностями:
a) отключение всех разрешающих устройств на том же мобильном пульте, которое должно вызвать защитную остановку.
Примечание 2 - Если два устройства включения 3P на одном мобильном пульте удерживаются в центральном положении, невозможно определить, было ли одно из них выпущено намеренно или неосознанно;
b) отключение любых активных разрешающих устройств, не интегрированных в мобильный пульт, которое должно вызывать защитную остановку;
c) полное сжатие любого разрешающего устройства 3P на мобильном пульте, которое должно вызывать защитную остановку в соответствии с 5.4.3;
d) после сжатия разрешающего устройства 3P из центрального положения до положения "Сжатие ВЫКЛ" должно выполняться следующее:
1) переход из полностью сжатого положения (сжатие выключено) в центральное положение включения не должно допускать движения робота, а также
2) движение робота должно быть разрешено только после того, как разрешающее устройство 3P было полностью разблокировано (положение "отпускание выключено") после нахождения в положении "Сжатие ВЫКЛ",
3) движение робота не должно быть разрешено до тех пор, пока устройство включения 3P не будет перемещено в центральное (ON) положение;
e) переход из автоматического режима в ручной режим, когда разрешающее устройство находится в центральном положении ВКЛ. В данном случае необходимо, чтобы разрешающее устройство было разблокировано (отпускание ВЫКЛ) и повторно активировано (в центре ВКЛ) до того, как движение робота будет разрешено.
Примечание 3 - Следует учитывать эргономические проблемы, связанные с постоянным приложением силы ручного включения при проектировании и интеграции разрешающего устройства в мобильный пульт.
5.6 Одновременное движение
Несколько манипуляторов могут быть связаны с одним мобильным пультом, который может перемещать манипуляторы независимо или одновременно. При настройке на одновременное движение и в ручном режиме должно быть выполнено следующее:
a) управление всеми функциями робота должно быть осуществлено одним мобильным пультом;
b) манипуляторы, которые должны быть включены в одновременное движение, должны быть выбраны до того, как манипулятор(ы) может(гут) быть перемещен(ы);
c) для одновременного перемещения выбранные манипуляторы должны находиться в одном и том же режиме работы (например, в ручном режиме с пониженной скоростью);
d) в точке выбора должна быть предусмотрена индикация (например, на мобильном пульте, пульте управления или манипуляторе) манипулятора(ов), который(ые) выбран(ы) для одновременного движения;
e) только выбранные манипуляторы могут перемещаться;
f) невыбранные манипуляторы не должны перемещаться.
Неожиданный пуск (5.2.2) должен быть предотвращен для любых невыбранных манипуляторов.
5.7 Ограничение движения робота
5.7.1 Общие положения
Должны быть предусмотрены средства для ограничения движения робота в области пространства, меньшей максимального пространства.
Средство должно ограничивать три оси наибольшего смещения. Робот должен соответствовать требованиям 5.9.2, 5.9.3, 5.9.4 или их комбинации.
Примечание 1 - Наибольшие перемещения обычно представляют собой три оси.
Примечание 2 - В контексте настоящего стандарта вспомогательные оси являются частью робота.
Для роботов класса I в соответствии с таблицей 2 ограничение движения робота может быть необязательным.
Либо робот не должен выходить за пределы положения ограничивающего(их) устройства (устройств), либо, достигнув ограничивающего устройства (устройств), должен инициировать защитную остановку (5.4.3).
Ограничивающие устройства должны иметь возможность останавливать движение робота при следующих условиях:
- максимальная полезная нагрузка;
- максимальная скорость;
- наихудшее положение, приводящее к максимальной нагрузке на ограничивающие устройства.
Примечание 3 - Максимальное напряжение - это положение, при котором достигается максимальный крутящий момент двигателя.
Предел движения должен быть определен как один из следующих:
a) в фактическом ожидаемом положении после достижения механического ограничивающего устройства, в том числе в случае динамического перерегулирования или деформации механического упора;
b) в фактическом ожидаемом положении остановки, учитывающем тормозной путь после достижения любого из следующих условий:
1) срабатывания электромеханического ограничителя положения (5.7.3),
2) в случае мягкой оси и ограничивающего пространства (5.7.4) положение или плоскость, где предполагаемым результатом является защитный упор;
c) на мягкой оси и ограничивающем пространство положении (или плоскости), когда перемещение тормозного пути учитывается непосредственно мягкой осью и функцией(ями) безопасности, ограничивающей(ими) пространство, чтобы гарантировать, что положение или плоскость не будут превышены. В этой ситуации тормозной путь не учитывают при определении ограниченного пространства, поскольку функция безопасности включает в себя тормозной путь.
5.7.2 Механические устройства ограничения движения оси
Робот должен иметь приспособления для присоединения и интеграции регулируемых механических или электромеханических ограничивающих устройств, когда не предусмотрены мягкая ось и функция(и) безопасности (5.9.4) ограничения пространства.
Примечание 1 - Регулируемые устройства позволяют пользователю настраивать размер ограниченного пространства.
Примечание 2 - Механические упоры, например жесткие упоры, регулируют вручную, а затем вручную фиксируют застежками.
Примечание 3 - Инструкции по получению и использованию ограничивающих устройств должны соответствовать требованиям этого раздела.
Испытание механических упоров должно быть осуществлено без какой-либо помощи при остановке.
5.7.3 Электромеханические устройства ограничения движения оси
Электромеханические средства ограничения диапазона движения могут быть предусмотрены только в том случае, если они спроектированы и реализованы таким образом, чтобы соответствовать характеристикам, указанным в 5.3.3. Показатели функциональной безопасности электромеханических ограничивающих устройств должны соответствовать требованиям 5.3.
Управляющие и рабочие программы робота не должны изменять настройки электромеханического ограничительного устройства.
5.7.4 Мягкая ось и ограничение пространства
Функции безопасности, обеспечивающие мягкое ограничение оси и пространства, должны соответствовать требованиям 5.3. Функции безопасности с мягким ограничением осей - это программные ограничения для движения робота. Функции безопасности, ограничивающие пространство, определяют геометрические формы или плоскости, которые можно использовать для ограничения движения робота внутри определенного пространства или для предотвращения входа робота в определенное пространство.
Функции безопасности, ограничивающие мягкую ось и пространство, могут быть использованы для ограничения движения и определения ограниченного пространства (см. ИСО 10218-2).
Во время выхода из любой защитной остановки, когда положение робота находится за пределами мягкой оси и действия функции безопасности, ограничивающей пространство, робот должен управляться в ручном режиме с пониженной скоростью, как описано в 5.2.8.2.2.
Настройки для функций безопасности мягкой оси и ограничения пространства должны быть параметрами, связанными с безопасностью, в соответствии с 5.3.5.
Примечание 1 - Для создания динамических ограниченных пространств можно использовать комбинацию нескольких пределов функций безопасности.
Примечание 2 - Функции безопасности, ограничивающие мягкую ось и пространство, могут быть особенно полезны для управления движением в ограниченных пространствах неправильной формы или защиты от точек защемления, создаваемых препятствиями (см. ИСО 10218-2).
5.7.5 Динамическое ограничение
Динамическое ограничение автоматически изменяет ось робота, ограничивая функции безопасности, что приводит к изменению ограниченного пространства робота во время автоматической работы. Функции безопасности с динамическим ограничением не являются обязательными. Если предусмотрено, динамическое ограничение должно соответствовать 5.3 и может быть выполнено параметризацией согласно 5.3.5.
5.8 Движение без подачи питания на приводы
Должны быть предусмотрены средства, позволяющие перемещать оси без использования мощности привода в аварийных или нештатных ситуациях, и предоставлены инструкции.
Примечание 1 - Некоторые роботы могут перемещаться одним оператором с приводом или без него.
По возможности перемещение осей должно быть выполнено одним оператором. Средства должны быть легкодоступными, но защищенными от непреднамеренного срабатывания. Если перемещение осей может быть выполнено вручную, должна быть информация о том, приведет ли робот к повреждению таким образом, что потребуется ремонт перед возобновлением его использования.
Примечание 2 - Некоторым роботам для передвижения требуется внешнее оборудование (например, кран, автопогрузчик), которое не входит в комплект поставки робота.
5.9 Лазеры и лазерное оборудование
Если в роботы встроено лазерное оборудование, конструкция и интеграция должны предотвращать случайное излучение. Лазерное оборудование должно быть защищено таким образом, чтобы предотвращались опасные ситуации из-за воздействия эффективного излучения, возникающего при отражении или диффузии, первичного излучения и вторичного излучения.
Оптическое оборудование для наблюдения или настройки лазерного оборудования не должно создавать опасные ситуации в результате его использования.
5.10 Возможности для совместных применений
5.10.1 Общие положения
Для разработки совместной задачи в соответствии с ИСО 10218-2 могут потребоваться возможности робота, включая функции безопасности. Собственная конструкция (5.10.4) и функции безопасности могут быть полезны для снижения риска согласно ИСО 12100 и ИСО 10218-2.
5.10.2 Ручное управление (HGC)
Роботы с ручным управлением должны иметь следующие функции безопасности в соответствии с 5.3:
- контролируемая скорость (5.5.2.2), которая должна иметь возможность настраиваться во время интеграции согласно ИСО 10218-2, а также:
- мягкая ось и ограничение пространства (5.7.4);
- контролируемая остановка (5.4.3.3);
- режим ожидания [5.10.2, перечисление c] и приложение C].
Вибрационные испытания следует проводить в соответствии с ИСО 20643:2005.
При наличии HGC робот должен соответствовать следующим требованиям, согласно которым робот должен:
a) располагаться или предусматриваться для установки в месте, близком к механическому интерфейсу, на котором позже будет установлен рабочий орган (см. ИСО 10218-2); а также
b) иметь функцию аварийной остановки в соответствии с 5.4.2; а также
c) иметь средства управления с задержкой времени в соответствии с МЭК 60204-1:2016, 9.2.3.7, где:
1) активация (положение ВКЛ) устройства управления удержанием в движении должна разрешать движение;
2) отключение (положение ВЫКЛ) устройства управления удержанием в рабочем состоянии должно вызывать защитную остановку, а затем контролируемую остановку в соответствии с 5.4.3,
3) органы управления с задержкой времени для пуска должны быть расположены и интегрированы таким образом, чтобы оператор не мог активировать (положение ВКЛ) устройство управления с задержкой времени для пуска, находясь между роботом и неподвижным объектом (например, без захвата или раздавливания).
Пример - Ниже приведены примеры, но не единственные средства для выполнения условий в перечислении 3) выше:
- два положения (например, переднее и заднее или кольцо с более чем одним положением устройства управления с задержкой времени),
- отдельное устройство управления с задержкой времени,
- путем локализации устройства управления с задержкой времени;
4) HGC должен быть спроектирован с учетом действий пользователя по управлению роботом таким образом, чтобы защемление, раздавливание острых краев и другие риски травм, "зажатых" или "сжатых предметами", уменьшались или устранялись за счет конструкции.
Если PFL предоставляется в соответствии с 5.10.4, то условия по перечислениям a)-c) 5.10.2 могут быть необязательными.
5.10.3 Контроль скорости и расстояния разделения (SSM)
С помощью SSM робот и оператор могут одновременно перемещаться в защищенном пространстве.
Если такой контроль предусмотрен в роботе, он должен выдерживать безопасное расстояние разделения от оператора(ов) в соответствии с ISO/DIS 10218-2:2020, 5.13.6.3.2, одним или несколькими из следующих действий:
- снижения скорости робота (например, до нуля), и/или
- изменения положения(й) и/или траектории движения робота;
- несоблюдения расстояния разделения, которое должно приводить к защитной остановке.
Обнаружение оператора(ов) может быть осуществлено неотъемлемой частью робота, или внешним средством, или сочетанием робота и внешних средств. Функции безопасности контроля скорости и расстояния разделения должны соответствовать 5.3.
Примечание - SSM может быть реализован несколькими способами, например система внешних датчиков предоставляет роботу:
- данные о положении оператора и скорости для внутреннего расчета плана движения с целью поддержания безопасного расстояния разделения;
- план движения для поддержания безопасного расстояния разделения.
5.10.4 Ограничение мощности и усилия (PFL) с помощью внутренней конструкции или функций безопасности
Обеспечение PFL может быть обеспечено безопасной конструкцией или функциями безопасности.
Если PFL достигается за счет безопасной конструкции, пределы должны быть фиксированными, нерегулируемыми и ненастраиваемыми.
Если PFL достигается за счет функций безопасности:
a) предельные значения мощности и усилия должны быть регулируемыми, а также
b) предельные значения мощности и усилия не должны превышаться во время работы, или при превышении предельных значений мощности и усилия должна быть инициирована защитная остановка; а также
c) должны быть предусмотрены следующие функции безопасности:
1) контролируемая скорость (5.5.2.2),
2) мягкая ось и ограничение пространства (5.7.4),
3) контролируемая остановка (5.4.3.3).
Превышение любого предела параметра должно вызывать защитную остановку в соответствии с 5.4.3. Функции безопасности робота с ограничением мощности и усилия должны соответствовать 5.3.
6 Верификация и валидация требований безопасности и защитных мер
6.1 Общие положения
В соответствии с требованиями разделов 4 и 5 изготовитель роботов должен обеспечить верификацию и валидацию конструкции своих роботов, включая встроенные/интегрированные или дополнительные функции безопасности и защитные меры.
6.2 Верификация и валидация
В приложении G приведены требования раздела 5 и средства, позволяющие выполнить верификацию и валидацию этих требований. С использованием одного или нескольких методов, приведенных в приложении G, для каждого требования должна быть выполнена верификация или валидация либо обе эти процедуры.
Примечание - Изготовитель несет ответственность за то, чтобы все применяемые элементы прошли процедуру верификации или валидации либо обе эти процедуры.
7 Информация по использованию
7.1 Общие положения
Информация для использования должна быть предоставлена в соответствии с 6.4 ИСО 12100:2010 для определенной интеграции робота в систему роботов (см. ИСО 10218-2), а также содержать данные о тех способах, посредством которых не допускается использовать робота, и, как показывает опыт, такое применение происходит часто.
Информация для использования является неотъемлемой частью конструкции робота и состоит:
a) из сигнальных и предупреждающих устройств;
b) маркировки, знаков (предупреждающих табличек) и письменных предупреждений;
c) сопроводительных документов (например, инструкции по эксплуатации).
Для гидравлических систем информация для использования должна соответствовать требованиям ИСО 4413:2010, раздел 7; для пневматических систем - требованиям ИСО 4414:2010, раздел 7.
Если иное не требуется национальным законодательством, информация для использования должна быть на языке той страны, в которую поставляется робот.
7.2 Сигналы и предупреждающие устройства
В той области, где они предусмотрены, визуальные (например, мигающие огни) и звуковые сигналы (например, зуммеры) должны соответствовать 5.2.5.
7.3 Маркировка
Каждый робот должен иметь ясную, четкую и прочную маркировку относительно:
a) информации производителя, включая следующее:
- наименование фирмы,
- полный адрес,
- если применимо, уполномоченный представитель или уполномоченный поставщик, их фирменное наименование и полный адрес;
b) информации о роботе, включая следующее:
- тип робота (например, промышленный робот),
- наименование или обозначение серии роботов, если применимо,
- номер модели или ссылочный номер (при наличии),
- год выпуска,
- масса и/или вес манипулятора робота,
- максимальный вылет и грузоподъемность;
c) данных для электрических и, если применимо, гидравлических и пневматических систем (например, минимальное и максимальное пневматическое давление);
d) точек подъема для транспортировки и установки, если применимо;
e) обязательной маркировки, если требуется.
Маркировка, паспортные таблички, ярлыки и идентификационные таблички должны быть расположены на видном месте, читаемыми и иметь достаточную прочность, чтобы противостоять действующим физическим условиям (например, водонепроницаемость).
Для электрического оборудования применяют требования МЭК 60204-1:2018, раздел 16.
7.4 Знаки (пиктограммы) и письменные предупреждения
Знаки и письменные предупреждения должны соответствовать 6.4.4 ИСО 12100:2010.
По возможности следует использовать зарегистрированные знаки согласно ИСО 7010. Если не применяют зарегистрированные знаки, знаки безопасности и маркировка с письменными предупреждениями должны соответствовать принципам серии стандартов ИСО 3864.
7.5 Инструкция по эксплуатации
7.5.1 Общие положения
Производитель должен предоставить руководство по эксплуатации в соответствии с ИСО 12100:2010, 6.4.5, и ИСО 20607:2019. Справочник должен содержать инструкции по расположению и функциям всех элементов управления, необходимых для настройки, установки, интеграции и обслуживания.
Для электрического оборудования информация должна соответствовать требованиям МЭК 60204-1:2018, раздел 17. Должны быть представлены схемы интерфейсов электрических, гидравлических и пневматических систем, необходимых для настройки, установки, интеграции и обслуживания.
Кроме того, руководство по эксплуатации должно содержать информацию в соответствии с 7.5.2-7.5.15.
Необходимая информация может быть также указана в других письменных инструкциях (например, на упаковке).
7.5.2 Идентификация
Информация о производителе должна содержать:
a) фирменное наименование;
b) полный адрес;
c) контактную информацию производителя (например, номер телефона, адрес веб-сайта службы/поддержки);
d) при возможности, данные об уполномоченном представителе или уполномоченном поставщике, а также наименование компании, полный адрес и контактную информацию;
e) обозначение оборудования, соответствующее приведенному непосредственно на оборудовании, за исключением серийного номера.
7.5.3 Использование по назначению
Должно быть предоставлено следующее описание:
a) робот и его компоненты (например, манипулятор, пульт управления, мобильный пульт);
b) ограничения использования роботов;
c) предполагаемые способы использования, а также разумно предсказуемое неправильное использование и запрещенное использование робота;
d) пределы:
- для диапазона движения,
- грузоподъемности, включая максимальную массу
- максимальной полезной нагрузки,
- TCP;
e) установка и подключение рабочего органа;
f) данные об остаточных рисках, которые не могут быть устранены с помощью защитных мер, реализованных в роботе;
g) если манипулятор предназначен для использования робота, при применении которого перемещается основание, общая масса манипулятора (с основанием и креплениями);
7.5.4 Установка
Должна быть предоставлена следующая информация по установке:
- описание установки;
- описание требований к установке (например, требования к установке, коммунальные услуги, нагрузка на пол, условия окружающей среды);
- информация о том, что стационарные посты управления должны быть расположены вне защищенного пространства таким образом, чтобы работа их устройств управления не вызывала дополнительных рисков.
Ограждения, защитные устройства и другие части, которые являются частью робота, но не установлены, должны быть четко обозначены в соответствии с их назначением.
Должна быть предоставлена подробная информация о центре тяжести. Если предполагаемое использование включает как стационарные, так и мобильные установки, то данные о центре тяжести должны включать максимальный размер и вес полезной нагрузки.
7.5.5 Остановка
Должна быть предоставлена информация о функциях остановки, устройствах и интеграции с внешним оборудованием.
Для роботов без функций безопасности, контролирующих тормозной путь и/или время остановки, должно быть предусмотрено следующее:
- время остановки и расстояние или угол от подачи сигнала остановки для трех осей с наибольшим соответствующим смещением и перемещением в соответствии с приложением H;
- рекомендуемый интервал для периодической остановки и проверки тормозного пути или угла остановки.
7.5.6 Ввод в эксплуатацию и программирование
Руководство по эксплуатации должно содержать инструкции по вводу в эксплуатацию, программированию и порядку проведения первоначального испытания и проверки робота и его защитных мер перед первым использованием и запуском в производство, включая функциональное тестирование настройки параметров для ручного режима пониженной скорости.
7.5.7 Эксплуатация и настройка
Руководство по эксплуатации должно содержать инструкции по безопасной эксплуатации и настройке, включая безопасные методы работы и обучение, необходимые для достижения надлежащего уровня навыков оператора(ов), работающего(их) с оборудованием.
7.5.8 Сингулярность
Информация о предотвращении сингулярности должна включать следующее:
- защита от сингулярностей, предусмотренная роботом;
- инструкции по устранению сингулярностей при программировании, которые можно использовать при разработке программ обучения.
7.5.9 Опасная энергия
Предоставлена следующая информация об опасной энергии:
- источники энергии;
- виды энергии;
- любая накопленная энергия.
Должны быть предоставлены инструкции о том, как:
a) изолировать энергию, включая средства изоляции;
b) заблокировать или иным образом закреплять средства отключения в обесточенном положении;
c) безопасно выполнять задачи по техническому обслуживанию;
d) закреплять оси, если удаление компонента (например, двигателя) может вызвать опасное движение из-за силы тяжести или выброса опасной энергии (например, пружины).
Примечание - См. пример, показанный на рисунке 1.
7.5.10 Движение без привода
Движение без движущей силы должно быть описано и включать следующее:
a) описание этой возможности; инструкция по перемещению робота без привода;
b) рекомендации по обучению оператора(ов) действиям в аварийных или нештатных ситуациях (например, те ситуации, которые могут потребовать движения без привода);
c) предупреждение о потенциальной(ых) опасности(ах);
d) предупреждения о том, что сила тяжести и срабатывание тормозных устройств могут создать дополнительную опасность.
7.5.11 Информационная безопасность
Должны быть определены особенности и методологии информационной безопасности, а также изложены требования к разработке организационных мер.
7.5.12 Функциональная безопасность
7.5.12.1 Общие положения
Каждая функция безопасности или комбинация функций безопасности должна быть описана с указанием ее характеристик функциональной безопасности, функциональности, доступности, а также пределов и условий использования.
Должны быть предоставлены параметры, связанные с безопасностью (например, PL, категория, SIL, HFT, DC, время отклика, категория останова, PFHD, частота испытаний, предположения, комментарии).
Информация о каждой функции безопасности должна быть предоставлена в соответствии с приложением D. Примерный формат таблицы приведен в приложении D.
Должны быть предоставлены инструкции о расположении и функционировании всех систем управления, включая схемы сопряжения электрических, гидравлических и пневматических систем, необходимых для настройки и установки.
Примечание - В инструкции не входят схемы робота или другие элементы управления, компоненты или другое имущество.
7.5.12.2 Программное обеспечение и связанные с безопасностью параметры программного обеспечения
Должна быть предоставлена следующая информация о параметризации программного обеспечения, связанной с безопасностью:
a) каким образом обеспечены параметры безопасности;
b) функции безопасности, на которые влияют вручную установленные параметры, такие как полезная нагрузка, TCP;
c) какие функции безопасности робота включены в идентификатор (например, контрольная сумма);
d) как просматривать и документировать настройки и параметры.
Должна быть предоставлена информация о настройках робота и ограничениях программного обеспечения, связанных с настройкой функции безопасности, если такая функция предусмотрена. Следует подчеркнуть значимость проверки и подтверждения параметров функции безопасности перед началом использования роботизированной системы робота. Это включает в себя начальную настройку и любые изменения параметров.
7.5.12.3 Время реакции функций безопасности
Если робот имеет входы функции безопасности, должно быть обеспечено максимальное время отклика. Это время реакции измеряют в зависимости от изменения состояния входа и до активации функции безопасности.
Если робот имеет выходы функции безопасности, должно быть обеспечено максимальное время отклика выходов функции безопасности. Это время реакции измеряют в зависимости от запуска функции безопасности и до изменения состояния выхода.
Должно быть указано максимальное время отклика каждой функции безопасности для вступления в силу любого изменения предельного значения параметра.
Должно быть предусмотрено время, необходимое для перехода от одного определенного ограничения скорости с контролируемой безопасностью к другому, когда установлено несколько ограничений скорости.
Должно быть предусмотрено время срабатывания для обнаружения потери сигнала связи для беспроводных мобильных пультов.
Примечание - Время реакции функции безопасности отличается от времени остановки, необходимого для достижения безопасного состояния.
7.5.12.4 Функции остановки, включая аварийную остановку
Для всех функций остановки должна быть указана категория остановки (т.е. категория 0, 1 или 2) в соответствии с МЭК 60204-1.
Информация о полном действии функций остановки робота, включая аварийную остановку, в отношении как манипулятора, так и любого(ых) входа(ов).
7.5.12.5 Внешние входы и выходы
Должна быть указана информация о технических характеристиках каждого предоставленного внешнего входа и выхода и о реализованных мерах по обнаружению неисправностей, а также инструкции по обеспечению средств обнаружения внешних неисправностей, если это необходимо. Указаны выходы и другие внешние входы и выходы, если они предусмотрены.
7.5.12.6 Режимы работы
Инструкции и предупреждения о том, что задачи ручного режима на пониженной скорости должны быть, где это практически возможно, выполнены всеми операторами за пределами защищенного пространства. Инструкции и предупреждения о том, что высокоскоростной ручной режим, в случае его использования, должны быть интегрированы таким образом, чтобы ручной режим выполнялся только тогда, когда человек находится внутри охраняемого помещения.
Инструкция о том, что до выбора автоматического режима любые приостановленные меры безопасности должны быть возвращены в их полную функциональность.
Приведены инструкции по использованию ручного режима (например, пониженная скорость или проверка) и связанные с ним остаточные риски.
7.5.12.7 Включение устройства
Информация о разрешающем устройстве должна включать описание работы каждого разрешающего устройства и предполагаемых функций, если можно использовать несколько разрешающих устройств.
Информация должна включать количество и режим работы разрешающих устройств, инструкции по установке дополнительных устройств, включая данные и критерии, необходимые для определения характеристик системы управления, связанной с безопасностью.
Если робот имеет вход разрешающего устройства, должны быть предоставлены инструкции по установке разрешающего устройства.
Информация об обеспечении выхода разрешающего устройства и о безопасном выполнении его функции должна соответствовать положениям 5.3.
Если робот класса I не имеет активирующего устройства, должны быть предоставлены инструкции о том, что оценка риска применения в соответствии с ISO/DIS 10218-2 должна определить, требуется ли активирующее устройство для снижения риска.
7.5.12.8 Ограничение положения оси
Должны быть описаны и предоставлены возможности ограничения движения оси (например, механическое ограничение, электромеханическое ограничение, мягкая ось и функция безопасности, ограничивающая пространство), а также способы использования этих возможностей.
a) Если ограничение оси обеспечивается механическими ограничителями, должно быть предусмотрено следующее:
1) способ установки или перемещения;
2) что именно установлено/поставляется с роботом;
3) количество механических ограничителей;
4) расположение механических ограничителей.
b) Если ограничение оси обеспечено электромеханическими ограничителями, должно быть предусмотрено следующее:
1) количество, расположение и исполнение любых электромеханических ограничивающих устройств;
2) разрешенная регулировка механических и электромеханических ограничивающих устройств;
3) время остановки на максимальной скорости, включая время контроля перед достижением полной остановки;
4) тормозной путь на максимальной скорости до полной остановки;
5) средства проверки пределов с помощью простого теста, которые будут использованы при реализации.
c) Если ограничение оси обеспечено мягкой осью и ограничением пространства, должно быть предусмотрено следующее:
1) допуски, при их наличии, функций безопасности для мягкой оси и ограничения пространства;
2) средства проверки пределов с помощью простого теста, которые будут использованы при реализации;
3) время остановки и тормозной путь/угол в соответствии с приложением H при максимальной полезной нагрузке, когда функции безопасности, ограничивающие ось и пространство, генерируют остановку при превышении предела;
i) время остановки, которое должно включать время контроля до достижения полной остановки;
ii) тормозной путь, который должен быть указан до полной остановки;
4) для тех роботов, которые осуществляют мониторинг их скорости и положения так, чтобы функции безопасности, ограничивающие мягкую ось и пространство, не превышались в соответствии с 5.3, время остановки и угол/расстояние для этой функции безопасности не требуются, поскольку остановка будет при отказе или обнаружении неисправности (см. 5.3.4).
d) Если предусмотрено динамическое ограничение (см. 5.7.5), должно быть обеспечено следующее:
1) если выходы предусмотрены для использования в динамическом ограниченном пространстве, характеристики функциональной безопасности,
2) время перехода для вступления в силу изменения предела.
Если движение робота может продолжаться за пределами положения ограничивающего(их) устройства (устройств) или за пределами установленного(ых) ограничения(ий), должно быть предоставлено руководство по определению ограниченного пространства.
Если существует вероятность путаницы в отношении вспомогательной(ых) оси(ей), если указанные характеристики и рабочие характеристики относятся только к роботу, к роботу и его вспомогательным осям в целом или к вспомогательным осям как к отдельному устройству.
7.5.12.9 Устройство(а) фиксации положения
Об устройстве(ах) удержания положения должно быть указано следующее:
a) процедуры проверки и/или проверки устройства удержания позиции (5.1.8);
b) описание удерживающей способности (5.1.8), включая:
- максимальное расстояние перемещения(й) при включенном устройстве удержания положения,
- инструкцию по тестированию движения.
7.5.13 Мобильные пульты
Должны быть предоставлены инструкции с описанием надлежащего использования:
- для беспроводных или съемных мобильных пультов, если они сконфигурированы таким образом, для предотвращения путаницы между активными и неактивными устройствами аварийной остановки;
- подвесок с кабелями, если они сконфигурированы таким образом, чтобы уменьшить риск споткнуться или упасть из-за кабелей.
Должна быть предоставлена информация о том, как выбрать высокоскоростной ручной режим с помощью мобильного пульта, если такая возможность предусмотрена.
7.5.14 Интеграция в роботизированную систему
Инструкции по проведению любых испытаний или проверок, необходимых после замены составных частей или добавления дополнительного оборудования (как аппаратного, так и программного обеспечения) к роботу, которое может повлиять на функции, связанные с безопасностью, включая выходной сигнал аварийной остановки, как в 5.4.2.4, и общую разрешающую способность устройства как в 5.5.3.
Информация о соответствующих стандартах, требованиям которых отвечает робот, включая любые сертификаты, выданные третьей стороной.
7.5.15 Техническое обслуживание
Должно быть предусмотрено следующее:
a) инструкции по безопасному обслуживанию, включая безопасные методы работы и обучение, необходимые для достижения необходимого уровня квалификации оператора(ов), работающего(их) с оборудованием;
b) интервалы и частота требуемых проверок и технического обслуживания;
c) инструкции и процедуры, позволяющие избежать ошибок при установке во время технического обслуживания машины;
d) химмотологическая карта жидкостей или смазочных материалов, которые будут использованы в системе смазки, торможения или трансмиссии, внутренней для робота, включая руководство по правильному выбору, подготовке, применению и обслуживанию расходных материалов;
e) комплект используемых запасных частей, если они влияют на здоровье и безопасность операторов (например, части системы управления, связанные с безопасностью).
7.5.16 Защита от поражения электрическим током
Информация о том, как обеспечить защиту от поражения электрическим током из-за непрямого контакта в роботе (например, с помощью устройства для автоматического отключения источника питания в линии, питающей робота).
7.5.17 Нештатные и аварийные ситуации
Если невозможно избежать самоблокировки, должны быть предоставлены инструкции по безопасной разблокировке оборудования:
- руководство по средствам освобождения оператора(ов), застрявшего(их) внутри робота или около него;
- информация и рекомендации для обучения операторов по действиям в аварийных или нештатных ситуациях.
7.5.18 Погрузочно-разгрузочные работы, подъем и транспортирование
Должны быть предоставлены инструкции по обращению, подъему и устойчивому транспортированию робота и связанных с ним компонентов.
Приложение A
(справочное)
Список существенных опасностей
В таблице А.1 представлен список существенных опасностей для роботов перед интеграцией в систему.
Примечание 1 - См. ИСО 10218-2 (приложение A) в отношении опасностей, связанных с роботизированной системой, приложением робота и роботизированной камерой.
Примечание 2 - Список в таблице A.1 заимствован из ИСО 12100:2010, таблица B.1.
Таблица A.1 - Список существенных опасностей
Тип или группа | Пример опасностей | Соответствующее требование | ||
Источник | Возможные последствия | |||
1 | Механические опасности | Движения (нормальные или неожиданные) любой части манипулятора (включая спинку); - движения (нормальные или неожиданные) дополнительной оси; - движение частей робота; - вращательное движение любых осей; - невыполнение ожидаемой функции безопасности; - свободная одежда, длинные волосы; - между сочленениями манипулятора; - непреднамеренное движение или активация вспомогательных осей, неожиданное высвобождение потенциальной энергии из накопленных источников | Поломка, срез, резка или отрубание, запутанность, втягивание или захват, влияние, укол или прокол, трение, истирание, жидкость/газ под высоким давлением, инъекция или выброс | 4 Оценка риска. 5.1 Конструкция робота. 5.2 Управление роботом. 5.3 Функции безопасности. 5.4 Функции остановки робота. 5.5 Другие функции безопасности. 5.6 Одновременное движение. 5.7 Ограничение движения робота. 5.8 Движение без тяги |
2 | Опасности поражения электри- ческим током | Контакт с токоведущими частями или соединениями; - смешение различных напряжений; - контакт с дискретными компонентами электрической (электронной) схемы, т.е. с конденсаторами; - воздействие дугового разряда | Поражение электрическим током, сжигание или обжигание, вдыхание токсичного дыма, поражение глаз электрическим током, искра, влияние на кардиостимулятор | 4 Оценка риска. 5.1 Дизайн робота. 5.2 Управление роботом. 5.3 Функции безопасности |
3 | Тепловые опасности | Горячие поверхности; - холодные поверхности | Ожоги, пожар, взрыв, излучение от источников тепла, вдыхание токсичных паров, обезвоживание | 4 Оценка риска. 5.1 Конструкция робота |
4 | Опасности вибрации | Ослабление соединений, креплений, деталей в результате неожиданной остановки или удалении частей | Усталость механических компонентов, приводящая к отказу работы; - неврологические повреждения; - сосудистое заболевание | 4 Оценка риска. 5.1 Конструкция робота. 5.10 Возможности для совместных применений |
5 | Опасности материалов/ веществ | Обслуживание, смазка и замена компонентов, которые покрыты жидкостями; - охлаждающие и технологические жидкости; - неожиданные отказы механических и электрических компонентов робота | Отравление; - вдыхание едких паров и пыли; - ожоги | 4 Оценка риска 5.1 Конструкция робота |
6 | Эргономи- ческие опасности | Ненадлежаще спроектированный мобильный пульт, человеко-машинный интерфейс (HMI) сенсорный экран или панель оператора; - плохо спроектированные разрешающие устройств; - неправильное расположение органов управления; - непреднамеренное срабатывание органов управления; - труднодоступность, подверженность дополнительным опасностям из-за несоответствующего расположения органов управления; - труднодоступность, подверженность дополнительным опасностям из-за несоответствующего расположения компонентов, требующих доступа для ожидаемых действий по техническому обслуживанию (поиск неисправностей, ремонт, корректирование); - компоненты в корпусах, которые блокируют существующее освещение; - блоки HMI размещены слишком высоко или низко для удобного просмотра | Усталость; - удар; - падение; - потеря осведомленности; - стресс; - последствия человеческой ошибки; - последствия ошибки оператора | 4 Оценка риска. 5.1 Конструкция робота. 5.2 Управление роботом. 5.3 Функции безопасности. 5.5 Другие функции безопасности. 5.2.9 Средства управления роботом. 5.10 Возможности для совместных применений |
7 | Комбинации опасностей | Неожиданные движения робота; - непредсказуемое поведение органов управления из-за электромагнитных помех (EMI) или скачков напряжения в источнике энергии; - неожиданный пуск робота; - неправильная интерпретация движения нескольких роботов при одновременном движении; - выданная команда остановки останавливает робота в неполном цикле; - скорость робота можно регулировать, что позволяет выполнять различные задачи на разных скоростях; - неисправности управления с последующим отпусканием тормоза манипулятора; - отпускание тормоза, в результате которого элементы робота неожиданно перемещаются под действием остаточных сил (инерция, сила тяжести, пружина/средства аккумулирования энергии); - неожиданные движения робота или вспомогательной оси; - невыполнение ожидаемой функции безопасности; - ослабленные незакрепленные шланги и компоненты отсоединяемые или разворачиваемые; - компоненты, неправильно установленные, создающие неожиданное движение/ опасность; - высокоскоростные вращающиеся части, ломающие или отсоединяющие от удерживающего оборудования; - перегрузка манипулятора или связанного с ним оборудования, приводящая к поломке или короблению механических компонентов; - неконтролируемый робот (удерживаемый в положении под действием силы тяжести), падающий или опрокидывающийся; - устранение неполадок во время ввода в эксплуатацию или вывода из эксплуатации; - детали, которые могут упасть, если они не прикреплены должным образом или неправильно установлены | Восстановление электроснабжения после перебоев; - внешние воздействия на источник питания; - неожиданный старт | 4 Оценка риска. 5.1 Конструкция робота. 5.2 Управление роботом. 5.3 Функции безопасности. 5.4 Функции остановки робота. 5.5 Другие функции безопасности. 5.2.9 Средства управления роботом. 5.6 Одновременное движение. 5.7 Ограничение движения робота. 5.8 Движение без тяги. 5.10 Возможности для совместных применений |
Приложение В
(справочное)
Иллюстрации пространств
На рисунке B.1 показан обзор всех различных пространств, связанных с применением робота.
На этом рисунке показаны концепции без размеров, и он не показан в масштабе.
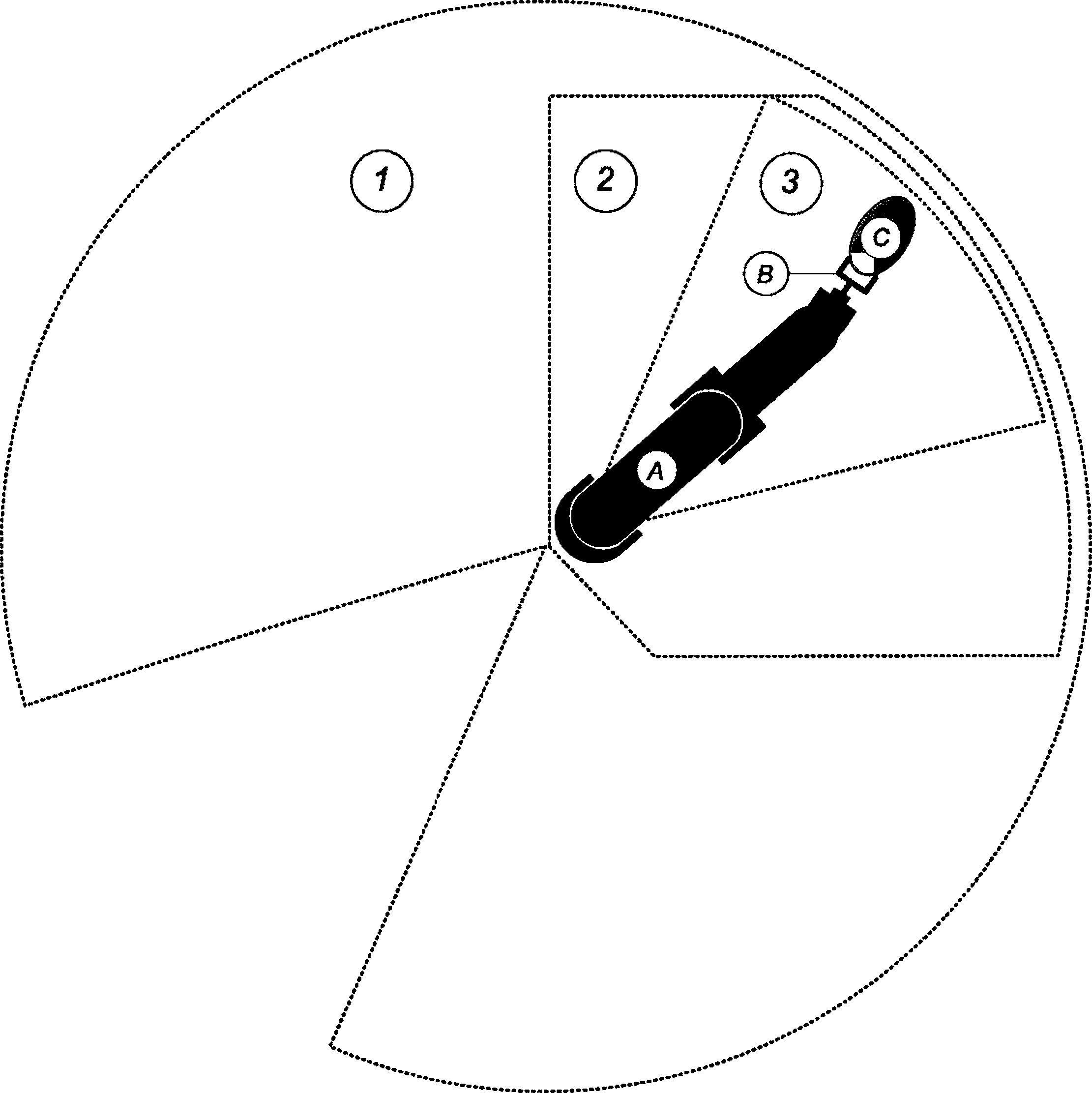 |
1 - максимальное пространство; 2 - ограниченное пространство; 3 - рабочее пространство; 4 - охраняемое пространство; A - манипулятор; B - рабочий орган робота; C - заготовка; D - заграждение
Примечание 1 - Максимальное пространство больше или равно ограниченному пространству, а ограниченное пространство больше или равно рабочему пространству.
Примечание 2 - На этом рисунке показаны концепции без размеров, и он не показан в масштабе. Граница охраняемого пространства может быть ближе к ограниченному пространству.
Примечание 3 - Заграждение D устройства - это лазерный сканер безопасности, показанный только в иллюстративных целях.
Рисунок В.1 - Пространства робота (без рабочего органа и заготовки)
На рисунке B.2 показаны пространства, связанные с роботом, где отсутствуют рабочий орган и заготовка. Ограниченное пространство и рабочее пространство отсутствуют до тех пор, пока робот не интегрирован в совместное применение.
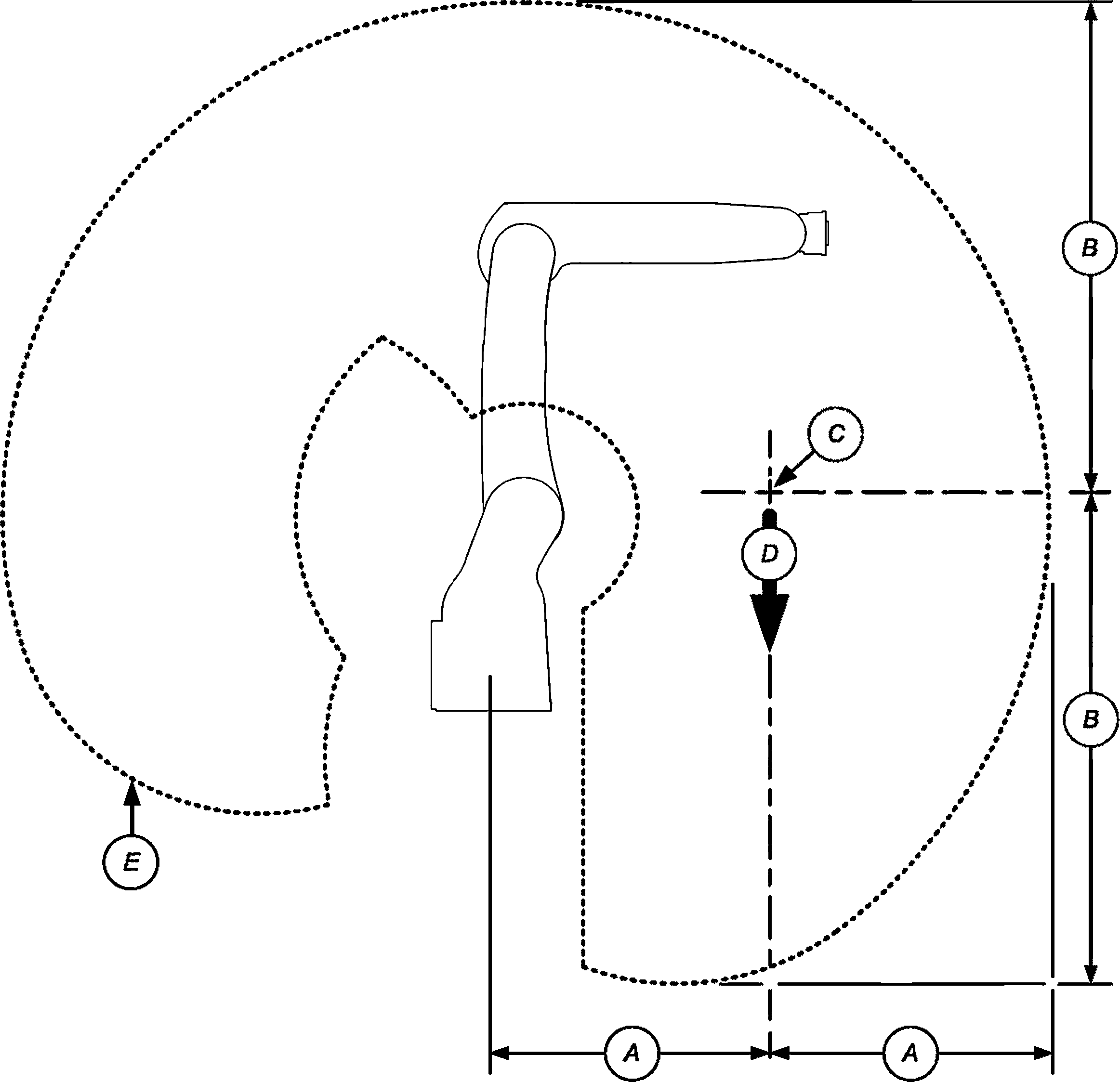 |
1 - максимальное пространство; А - манипулятор
Рисунок B.2 - Максимальное пространство робота (без рабочего органа и без заготовки)
На рисунке B.3 показаны пространства, связанные с роботизированной системой (робот и рабочий орган), а также деталь без привязки к конкретному применению.
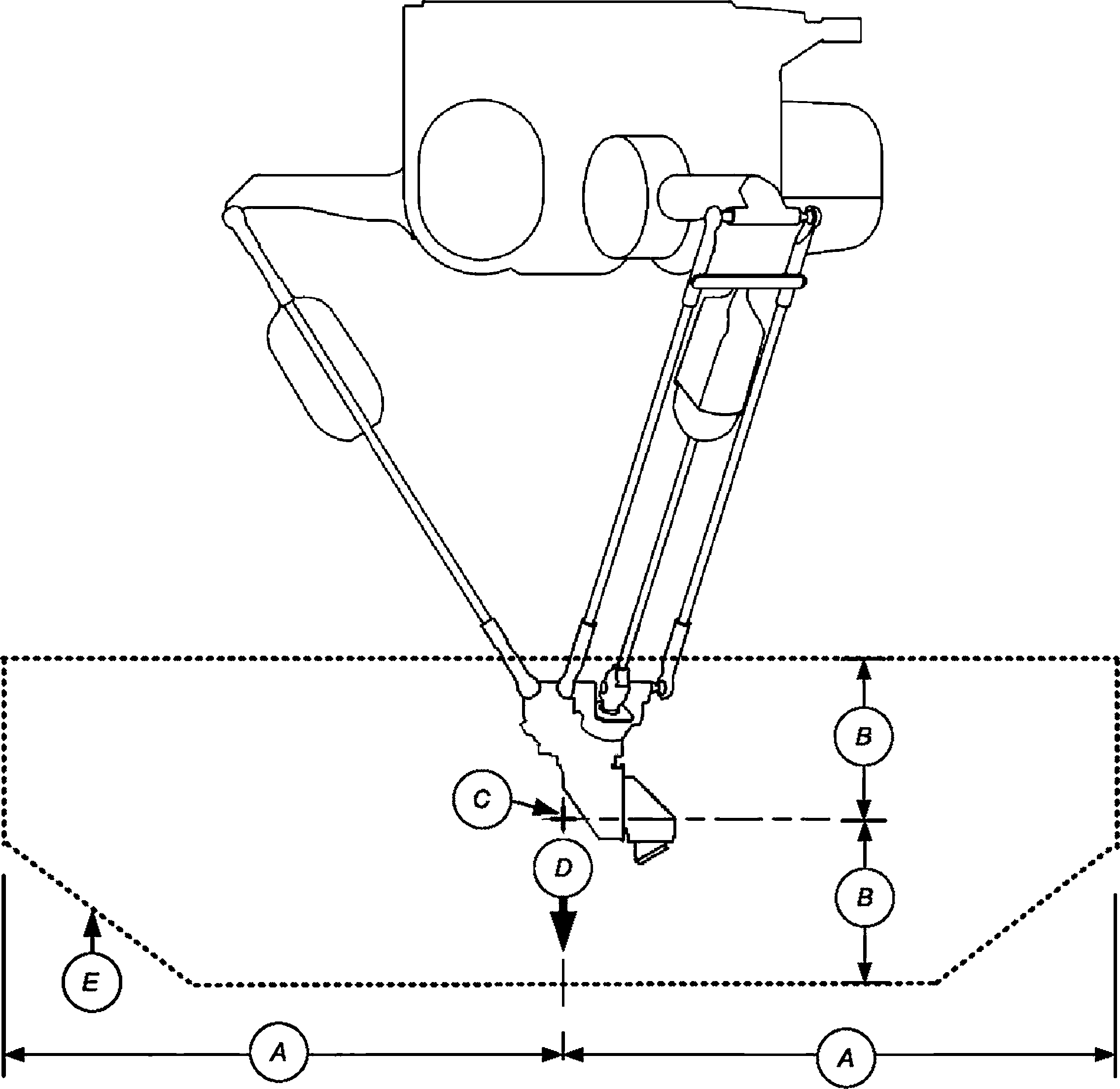 |
1 - максимальное пространство; 2 - ограниченное пространство; 3 - рабочее пространство; A - манипулятор; B - рабочий орган робота; C - заготовка
Рисунок B.3 - Пространства роботизированной системы (с рабочим органом) плюс заготовка
Приложение С
(обязательное)
Функции безопасности
В таблице C.1 подробно описаны функции безопасности робота, которые должны соответствовать положениям 5.3.3, за исключением функций безопасности робота класса I (5.1.17), которые могут быть не ниже PLb или SIL 1. Таблица C.2 содержит функции безопасности, которые могут иметь различные показатели функциональной безопасности.
Примечание - Для применения робота могут потребоваться функции безопасности, соответствующие PLe (Cat 3 или Cat 4) или SIL 3 (HFT 1).
Таблица C.1 - Функции безопасности робота
Пункт | Обязательный, ИЛИ условный, ИЛИ дополнительный | Наименование функции безопасности | Возможное запускающее событие | Ожидаемый результат |
5.1.8 | Дополнительный | Удержание позиции | Питание робота отключается, пока робот остановлен | Робот не двигается |
5.2.4 | Условный, если предусмотрены функции блокировки | Блокировка | Открытие или снятие ограждения (например, покрытие) | Отключение всех опасных функций робота |
5.2.8.2.1 | Обязательный | Ручной режим, общий | Смена режима на ручной режим | Автоматический режим исключается. Включение устройства в активное состояние на пульте управления |
5.2.8.2.2 | Обязательно для роботов класса II | Ручной режим, пониженная скорость | Ручной режим, выбрана пониженная скорость | Пониженная скорость (5.5.2.1) активна |
5.2.8.2.3 | Условный. Требуется для скоростного ручного режима | Ручной режим, скоростной | Ручной режим, выбран высокоскоростной | Контролируемая скорость (5.5.2.2) активна |
5.2.8.3 | Условный. Требуется при наличии изменения активного снижения риска с активацией режима | Активация режима | Активация выбранного режима | Защитный упор (5.4.3). Активация соответствующих функций безопасности для каждого режима. Отдельное действие, необходимое для возобновления работы (ручное или автоматическое) |
5.4.3 | Обязательное | Защитная остановка | Срабатывание внутренней функции безопасности ИЛИ срабатывание защитного устройства, подключенного к входу функции защитной остановки | Прекратить все опасные функции робота, которые должны контролироваться защитным устройством |
5.4.3.3 | Условный, требующийся для HGC (5.10.2) без PFL; - PFL по функциям безопасности (5.10.4); - одновременное движение (5, 6) | Контроли- руемая остановка | Срабатывание остановки категории 2 защитным устройством, ручная команда, программа, функция безопасности | После остановки робота отслеживается положение, которое должно оставаться в состоянии покоя, и контролируемый выход состояния покоя указывает на то, что остановка робота контролируется |
5.5.1.1 | Обязательный | Начала блокировки | Электроснабжение включено ИЛИ перебой электроснабжения и последующее восстановление питания | Отсутствие движения, пока не будет ручного сброса |
5.5.1.2 | Обязательный | Перезапуск блокировки | Смена режима по 5.5.2.2 ИЛИ защитная остановка в ручном режиме | Отсутствие движения, пока не будет ручного сброса |
5.5.2.1 | Обязательный | Пониженная скорость | Выбор ручного режима | Защитная остановка (5.4.3) при превышении ограничения скорости ___________________________ Не позволяйте роботу превысить лимит, замедляясь или останавливаясь (защитная остановка) до того, как лимит будет превышен |
5.5.2.2 | Условный, требующийся для HGC (5.10.2); - PFL по функциям безопасности (5.10.4); - см. также удержание позиции (5.1.8) | Контроли- руемая скорость | Робот превышает настроенный лимит _____________________ Непрерывный мониторинг до достижения точки, в которой должна быть инициирована остановка, чтобы не был превышен сконфигурированный предел | Защитная остановка (5.4.3) при превышении ограничения скорости __________________________ Не позволяйте роботу превысить лимит, замедляясь или останавливаясь (защитная остановка), до того, как лимит будет превышен |
5.5.3 | Обязательный | Включение функции устройства | Освобождение или сжатие разрешающего устройства 3P | Остановить и предотвратить движение робота и выполнение других процессов, опасность которых контролируется роботом |
5.6 | Условный. Требуется для одновременного управления | Ограничение выбора робота | Подбор роботов для одновременного контроля | Для одновременного движения можно выбрать только роботов в одном режиме, А ТАКЖЕ любой невыбранный робот должен находиться в контролируемом состоянии покоя |
5.7.3 | Условный. Требуется, если это средство ограничения оси | Электро- механическое ограничение оси | Превышен предел _____________________ Достижение точки, в которой должна быть инициирована остановка, чтобы предел не был превышен | Защитная остановка (5.4.3) __________________________ Защитная остановка (5.4.3) |
5.7.4 | Условный, требующийся для HGC (5.10.2); - PFL (5.10.4) по функциям безопасности | Мягкая ось и ограничение пространства | Превышен предел _____________________ Не превышайте лимит(ы). Достижение точки, где должна быть инициирована остановка, чтобы лимит не был превышен | Защитная остановка (5.4.3) __________________________ Предотвращение превышения роботом установленного предела с помощью замедления или защитной остановки (5.4.3) |
5.7.5 | Дополнительный | Динами- ческое ограничение | Превышен предел _____________________ Не превышайте лимит(ы). _____________________ Достижение точки, в которой должна быть инициирована остановка, чтобы предел не был превышен | Защитная остановка (5.4.3) __________________________ Не позволяйте роботу превысить установленный предел, замедляя ход или защитную остановку (5.4.3) |
5.10.2 | Условный. Требуется для роботов с HGC | Постоянный контроль | Разблокировка устройства управления удержанием в движении | Защитная остановка (5.4.3) |
5.10.3 | Условный. Требуется для роботов с функциями/ возможностями безопасности SSM | Контроль скорости и разделения (SSM) | Положение человека относительно робота такое, что робот не сможет остановиться до того, как войдет в контакт с человеком | Изменение скорости робота (например, до нуля) __________________________ Изменение положения(й) и/или траектории движения робота |
5.10.4 | Условный. Требуется для роботов PFL функциями безопасности | Контроли- руемая мощность и ограничение усилия | Превышение установленного(ых) лимита(ов) _____________________ Слежение для предотвращения превышения лимита(ов) | Одно или несколько из следующих: - защитная остановка (5.4.3); - остановка робота, затем переход в положение, где предел не превышен. Затем вызов защитной остановки (5.4.3) или контролируемой остановки (5.4.3.3); - остановка робота, удержание положения (контролируемая остановка). Робот может автоматически переходить в состояние без усилия и крутящего момента |
5.1.8, 5.4.3.3, прило- жение I.7.1 | Дополнительный | Контроли- руемая позиция | Защитное устройство, устройство ручного управления, функция безопасности _____________________ Робот остановлен по категории 2 (контролируемая остановка) в заданном положении | Все нижеприведенное: 1) робот перемещается в заданное положение в течение заданного времени; 2) контролируемая остановка (5.4.3.3); 3) робот не двигается с заданного положения. Опционально, предохранительный выход изменяет состояние __________________________ Робот не двигается с заданного положения |
7.5.5, прило- жение H, прило- жение I, I.7.2 | Дополнительный | Ограничение времени остановки | Превышение предела _____________________ Достигните точки, в которой должна быть инициирована остановка, чтобы предел не был превышен | Защитная остановка (5.4.3) Быть инициированным, чтобы предел не был превышен. Не позволяйте роботу превысить установленный предел, замедляя робота или используя защитную остановку (5.4.3) |
7.5.5, прило- жение H, прило- жение I, I.7.2 | Дополнительный | Ограничение тормозного пути | Превышен предел _____________________ Достижение точки, в которой должна быть инициирована остановка, чтобы предел не был превышен | Защитная остановка (5.4.3) __________________________ Быть инициированным, чтобы предел не был превышен. Не позволяйте роботу превысить установленный предел, замедляя робота или используя защитную остановку (5.4.3) |
Обязательный - предоставляется. Условный - предоставляется, если выполняются определенные условия в соответствии с указанным пунктом. Дополнительный - не требуется и может быть предоставлен как опция. | ||||
В таблице C.2 указаны требования к характеристикам функциональной безопасности, которые могут отличаться от минимальных требований, приведенных в таблице C.1 и 5.3.3.
Таблица C.2 - Функции безопасности робота
Пункт | Обязательный, ИЛИ условный, ИЛИ дополни- тельный | Наименование функции безопасности | Возможное запускающее событие | Ожидаемый результат | Минимальные показатели функциональной безопасности по классам роботов (5.1.17) | |
Класс I | Класс II | |||||
5.2.7 | Дополни- тельный | Одноточечный контроль | Выбор активной точки контроля | Робот должен реагировать только на активную точку управления | PLa | PLa |
5.2.7.3 | Дополни- тельный | Включение внешнего управления | Запрос на внешнее управление роботом | Требуется локальное действие для включения внешнего управления | PLa | PLa |
5.2.8.2.3, перечис- ление g) | Условный. Требуется, если предусмотрен скоростной ручной режим | Ручной режим, скоростное ограничение по времени | Устройство разблокировано по истечении 5 мин после включения | Для возобновления ранее выбранной более высокой скорости требуется отдельное действие | PLa | PLa |
5.4.2 | Обязательный | Аварийная остановка | Ручное срабатывание устройства аварийной остановки | Отключение всех опасных функций робота | PLc
SIL 1 | PLc
SIL 1 |
Обязательный - предоставляется. Условный - предоставляется, если выполняются определенные условия в соответствии с указанным пунктом. Дополнительный - не требуется и может быть предоставлен как опция. | ||||||
Приложение D
(обязательное)
Необходимая информация о безопасности
Информация о безопасности предоставляется в соответствии с 7.5.11. Таблица D.1 является примером, который можно использовать для представления информации для каждой функции безопасности. Может быть представлена более подробная информация.
Таблица D.1 - Пример информации о функциях безопасности
Номер пункта, при его нал- ичии | Вклю- чены в конт- роль- ную сумму | Наи- мено- вание функ- ции безо- пас- ности | Акти- вен в режи- ме(ах) | Запус- каю- щее собы- тие | Область управ- ления | Пред- пола- гаемый резуль- тат | Кате- гория оста- новки и описа- ние, если | Предпо- лагаемый резуль- тат. Реакция на обнару- женную неис- | Тре- буется сброс (см. приме- чание 4) | Допу- щения и условия исполь- зования (см. приме- чание 5) | Диагно- стичес- кий диа- пазон | Показатели функцио- нальной безо- пасности (см. приме- чание 1) | Время отклика, скорость тести- рования (см. приме- чание 6) | ||
приме- нимо (см. приме- чание 2) | прав- ность в функции безо- пасности (см. приме- чание 3) | PL и кате- гория | SIL и HFT | 1.20Е-07 без внеш- него защит- ного устрой- ства | Время остановки зависит от настройки функции безо- пасности, времени безо- пасности | ||||||||||
При- мер: 5.4.3.1 | Да | Защит- ная оста- новка или "предо- храняю- щая" оста- новка | Наст- ройки: все режимы или только авто- мати- ческий режим | Внут- ренняя функ- ция безо- пас- ности или внеш- нее защит- ное устрой- ство | Робот | Кон- троли- руе- мая оста- новка | Оста- новка кате- гории 2 | Робот останав- ливается. При оста- новке траекто- рия сохра- няется. При остановке происхо- дит контро- лируе- мая оста- новка | Наст- ройки: авто- мати- чес- кий или ручной сброс. Сброс мобиль- ного пульта или исполь- зование внеш- него входа | 1) Внеш- нее защит- ное устрой- ство соответ- ствует тем же функцио- нальным требо- ваниям безо- пасности 2) Двойные входы | Сред- ний | PLD, кате- гория 3 | |||
Примечания 1 В соответствии с ИСО 13849-1 или МЭК 62061. 2 Категория остановки согласно МЭК 60204-1. Если применимо, как описано в МЭК 61850-5-2. 3 Например, запретить перезапуск. См. 5.3.4 для обнаружения отказов или неисправностей. 4 Пример: Какого типа сброс? Это сброс ручной или автоматический. 5 Допущения: Nop, общие выходы, исключение отказов и любые вытекающие из этого требования к установке, которые уменьшают отказ. 6 Описание применимого времени отклика(ов), скорость проверки или то и другое. | |||||||||||||||
Приложение Е
(обязательное)
E.1 Общие сведения
Роботы могут быть отнесены к классу II без проведения испытаний, указанных в данном приложении. В этом случае робот должен соответствовать требованиям робота класса II, включая характеристики функциональной безопасности в соответствии с 5.3.3.
Устройство измерения силы должно быть откалибровано.
E.2 Методика испытаний роботов класса I
Сбор данных измерений должен быть выполнен следующим образом, чтобы свести к минимуму влияние инерции и условий удара:
a) устройство для измерения силы должно иметь упругий элемент с результирующей жесткостью пружины k=75 Н/мм на измерительной поверхности;
b) параметры движения:
1) для испытания на вертикальное перемещение:
- располагают контактную поверхность измерительного устройства в положение "середина досягаемости", как показано в позиции C на рисунке E.1, рисунке E.2 или рисунке E.3,
- выравнивают центр механической интерфейсной пластины над центром площади поверхности устройства измерения силы,
- располагают робот так, чтобы механический интерфейс находился на 1 мм выше центра контактной поверхности устройства измерения силы,
- инициируют движение робота вертикально вниз, используя максимальную скорость и возможности ускорения,
- фиксируют максимальное усилие, измеренное датчиком силы;
2) для испытания на горизонтальное перемещение:
- располагают контактную поверхность измерительного устройства, как показано в позиции C на рисунке E.4, рисунке E.5 или E.6,
- совмещают центр контактной поверхности устройства измерения силы с центром механического интерфейса,
- располагают робот так, чтобы механический интерфейс находился на расстоянии 1 мм от контактной поверхности устройства измерения силы,
- инициируют движение робота по горизонтали, используя максимальную скорость и возможности ускорения,
- фиксируют максимальное усилие, измеренное устройством измерения силы;
c) выполняют не менее трех испытаний по вертикали и горизонтали, пока достигнутые результаты не будут иметь отклонение между значениями испытаний не более 10%;
Вид испытания | Измерение А | Измерение B | Среднее |
Вертикальное перемещение | |||
Горизонтальное перемещение | |||
Другое (описать) | |||
... |
 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.1 - Пример вертикального (направление вниз) места измерения для 6-осевого шарнирно-сочлененного робота
 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.2 - Пример вертикального (направление вниз) места измерения для дельта-робота
 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.3 - Пример вертикального (направление вниз) места измерения для робота SCARA
 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.4 - Пример горизонтального (бокового) места измерения для 6-осевого сочлененного робота
 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.5 - Пример горизонтального (бокового) места измерения для дельта-робота
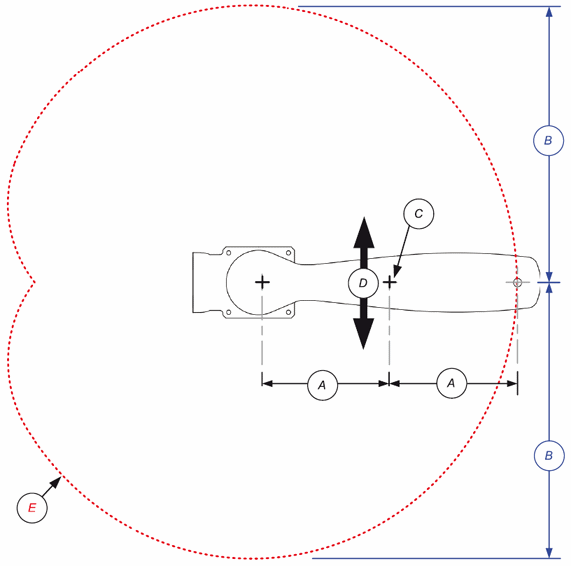 |
A - предельное расстояние в направлении X, измеренное от центра базы робота до границы предельной зоны (размеры А равны); B - предельное расстояние в направлении Z, измеренные границы предельной зоны (размеры B равны); C - расположение контактной поверхности устройства измерения силы; D - направление движения (вниз) к устройству измерения силы; E - граница предельной зоны (вид сбоку)
Рисунок E.6 - Пример горизонтального (бокового) места измерения для робота SCARA
Приложение F
(справочное)
Символы
Таблица F.1 содержит указания по символам для режимов прямого управления, внешнего управления, включения и выключения питания. Другие символы могут быть использованы для обозначения скорости, программы и т.д.
Дополнительный текст может быть указан вместе с символами.
Таблица F.1 - Символы
Струк- турный элемент | Описание | Символ
| Ссылка на ИСО 7000 |
5.2.8.1 | Автоматический режим Для обозначения любой автоматической замкнутой функции | 
| 0017
Автоматическое управление
|
5.2.8.2 | Ручной режим Для обозначения ручного режима управления. Для определения положения переключателя, при котором оборудование находится под ручным (а не автоматическим) управлением. Для определения элемента управления, активирующего ручное управление. Указывает на то, что оборудование находится в ручном режиме управления | 
| 0096
Ручной режим. Ручное управление
|
5.2.7.3 | Внешнее управление (ВКЛ) активировать Для определения способа перехода к внешнему управлению | 
| 1108
Пульт дистанционного управления, включить, пульт дистанционного управления активировать |
5.2.7.3 | Внешнее управление (ВЫКЛ) Деактивировать (прямое управление включить) для определения способа перехода к прямому контролю | 
| 1109
Пульт дистанционного управления выключить, пульт дистанционного управления деактивировать
|
5.2.5 | Включение Для обозначения подключения к сети, по крайней мере, для сетевых выключателей или их положений, а также для тех случаев, когда речь идет о безопасности |
| 5007
"ВКЛ" (питание) |
5.2.5 | Выключение Для обозначения отключения от сети, по крайней мере, для сетевых выключателей или их положений, а также в тех случаях, когда речь идет о безопасности | 
| 5008
"ВЫКЛ" (питание)
|
Приложение G
(обязательное)
Средства валидации и верификации конструкции и защитных мер
В таблице G.1 перечислены конкретные требования к рабочим характеристикам, которые должны быть валидированы или верифицированы, или и то и другое. В таблице G.1 представлены допустимые методы верификации, валидации или обоих требований из перечисленных в разделе 5.
Верификация и валидация в соответствии с разделом 5 должны быть выполнены с использованием одного или нескольких из следующих методов;
А - визуальный осмотр;
B - тестирование образца изделия;
С - измерение;
D - наблюдение во время работы;
E - анализ коммутационных схем и конструкторской документации;
F - анализ оценки риска;
G - анализ спецификаций и информации по использованию.
Таблица G.1 - Средства валидации и верификации проектных требований и защитных мер, указанных в разделе 5
Струк- турный элемент | Требования к конструкции робота и/или защитные меры по его применению | Метод | ||||||
A | B | C | D | E | F | G | ||
5.1 | Конструкция робота | |||||||
5.1.1 | В соответствии с принципами ИСО 12100 для выявленных опасностей | Х | Х | Х | ||||
5.1.2 | Материалы, механическая прочность и механическое проектирование | |||||||
5.1.2.1 | Отказы из-за усталости и износа не приводят к опасной ситуации для предполагаемого жизненного цикла | Х | Х | Х | Х | Х | ||
5.1.2.2 | Материалы | |||||||
5.1.2.2 | Подходят для предполагаемого использования | Х | Х | Х | ||||
5.1.2.2 | Не ставят под угрозу безопасность или здоровье людей | Х | Х | |||||
5.1.2.2 | Нетоксичны во всех разумно предсказуемых условиях использования | Х | Х | Х | ||||
5.1.2.2 | Не подвержены хрупкому разрушению, чрезмерной деформации или выбросу токсичных или легковоспламеняющихся паров | Х | Х | Х | ||||
5.1.2.2 | Сохраняют свои свойства в разумно предсказуемом диапазоне климатических и рабочих условий, включая колебания температуры или резкие изменения | Х | Х | Х | Х | Х | ||
5.1.2.1 | При использовании жидкостей машины и механизмы проектируют и конструируют таким образом, чтобы предотвратить риски, связанные с заполнением, использованием, восстановлением или сливом | Х | Х | Х | Х | |||
5.1.2.3 | Механическая прочность робота | |||||||
5.1.2.3 | Выдерживает перегрузку при статических испытаниях без постоянной деформации или патентного дефекта, где прочностные расчеты имеют минимальный коэффициент статических испытаний 1,25 | Х | Х | Х | Х | |||
5.1.2.3 | Может пройти без сбоев динамические испытания с использованием максимальной полезной нагрузки, умноженной на коэффициент динамического испытания, где коэффициент не менее 1,1 | Х | Х | Х | Х | |||
5.1.2.3 | Испытания проводят на заданных скоростях | Х | Х | Х | ||||
5.1.2.3 | Если одновременные движения робота могут быть запрограммированы, тесты проводят с использованием наименее благоприятных условий | Х | Х | Х | Х | |||
5.1.2.4 | Механическое проектирование | |||||||
5.1.2.4 | Открытые острые края и углы, а также опасные выступы уменьшаются, насколько это практически возможно | Х | Х | Х | ||||
5.1.2.4 | Механизмы, которые обеспечивают движение, расположены или установлены внутри рамы робота, поэтому они обычно недоступны | Х | Х | Х | ||||
5.1.2.4 | Воздействие опасностей, вызванных такими компонентами, как валы двигателя, шестерни, приводные ремни или рычажные механизмы, которые не защищены встроенными крышками, предотвращается либо смонтированными ограждениями, либо подвижными ограждениями в соответствии с ИСО 14120 | Х | Х | |||||
5.1.2.4 | Системы фиксации неподвижных ограждений, предназначенные для снятия при обычных сервисных работах, остаются прикрепленными к роботу или ограждению | Х | Х | Х | Х | Х | ||
5.1.2.4 | Подвижные ограждения блокируют при опасных движениях таким образом, что опасные функции машины прекращаются до того, как они становятся доступными | Х | Х | Х | Х | Х | ||
5.1.2.4 | Исключены ошибки при установке или переустановке определенных деталей, которые могут быть источником риска. Если это невозможно, информация по использованию предоставляется, по крайней мере, на самих частях и/или их корпусах | Х | Х | Х | Х | Х | ||
5.1.3 | Погрузочно-разгрузочные работы, подъем и транспортирование | |||||||
5.1.3 | Опасности из-за резких движений или неустойчивости, таких как опрокидывание и опрокидывание во время транспортирования, подъема и манипуляций с роботом или его составными частями, предотвращаются до тех пор, пока с ними обращаются в соответствии с инструкциями по эксплуатации | Х | Х | Х | Х | Х | ||
5.1.3 | Предусмотрены меры для подъема и достаточные для работы с ожидаемым грузом, включая соответствующую конструкцию, дополнительные опорные элементы и указанную упаковку | Х | Х | Х | Х | |||
5.1.3 | Предусмотрены условия для перемещения и подъема робота и связанных с ним компонентов, которые подходят для работы с ожидаемым грузом | Х | Х | Х | Х | |||
5.1.4 | Упаковка | |||||||
5.1.4 | Любые части робота, предназначенные для отдельного обращения, упакованы или спроектированы таким образом, чтобы обеспечить обращение без травм и хранение без повреждения робота | Х | Х | Х | Х | |||
5.1.5 | Устойчивость | |||||||
5.1.5 | Устойчив к установке, эксплуатации, использованию и разборке, так что падение и опрокидывание предотвращаются за счет специального крепления для надежного крепления робота и его компонентов | Х | Х | Х | Х | Х | ||
5.1.6 | Температурные и пожарные риски | |||||||
5.1.6 | Температура доступных поверхностей соответствует серии стандартов ИСО 13732 | Х | Х | |||||
5.1.6 | В тех случаях, когда существует риск возгорания или перегрева, применяются принципы проектирования ИСО 19353 | Х | Х | Х | ||||
5.1.7 | Спецтехника | |||||||
5.1.7 | Поставка со специальным оборудованием и аксессуарами, позволяющими регулировать, обслуживать и безопасно использовать робота | Х | Х | Х | Х | Х | Х | |
5.1.8 | Удержание позиции | |||||||
5.1.8 | Имеются средства для поддержания положения робота без привода (например, тормоза, штифты) | Х | Х | Х | ||||
5.1.8 | Когда это требуется по соображениям безопасности, используются соответствующие расчетные запасы и предоставляется метод испытаний, если отказ может вызвать опасную ситуацию | Х | Х | Х | Х | |||
5.1.9 | Вспомогательная(ые) ось(и) | |||||||
5.1.9 | Вспомогательные оси, если они установлены с роботом и предназначены для подъема или удержания подвешенной массы, соответствуют 5.1.2 и 5.1.8 | Х | Х | Х | ||||
5.1.9 | Когда движение вспомогательной оси влияет на скорость TCP в ручном режиме с пониженной скоростью, к вспомогательной(ым) оси(ям) применяют требования 5.6.2.2 с пониженной скоростью | Х | Х | Х | Х | |||
5.1.9 | Если для робота предусмотрена функция безопасности с контролируемой скоростью, она также предусмотрена для вспомогательной оси | Х | Х | Х | ||||
5.1.9 | При включении в максимальное движение обеспечивается ограничение оси в соответствии с 5.9 | Х | Х | Х | Х | Х | ||
5.1.10 | Потеря или изменение мощности | |||||||
5.1.10 | Потеря или изменение мощности не приводит к опасной ситуации | Х | Х | Х | ||||
5.1.10 | Повторное включение питания не приводит к опасному движению или изменению параметров | Х | Х | Х | ||||
5.1.10 | Соответствует ИСО 14118 для предотвращения неожиданного пуска | Х | Х | Х | Х | |||
5.1.11 | Неисправность компонентов | |||||||
5.1.11 | Компоненты робота спроектированы, сконструированы, закреплены или изолированы таким образом, чтобы опасность, вызванная поломкой, ослаблением или высвобождением накопленной энергии, была снижена до приемлемого уровня | Х | Х | Х | Х | Х | ||
5.1.12 | Опасная энергия | |||||||
5.1.12 | Накопленная энергия не создает опасных ситуаций | Х | Х | Х | Х | Х | Х | |
5.1.12 | Предусмотрены средства предотвращения неконтролируемого или опасного высвобождения накопленной энергии | Х | Х | Х | Х | Х | Х | |
5.1.12 | Если опасная энергия является потенциальной (например, пружинный балансир, газовый балансир), у робота есть средства, чтобы зафиксировать его в обесточенном положении | Х | Х | Х | Х | Х | ||
5.1.12 | Оснащен средствами для изоляции от всех источников энергии | Х | Х | Х | Х | Х | ||
5.1.12 | Средства могут быть заблокированы или защищены | Х | Х | Х | Х | Х | ||
5.1.12 | Безопасный выпуск или локализация обеспечены в соответствии с ИСО 14118 | Х | Х | Х | ||||
5.1.12 | Если оси робота могут опускаться, падать или дрейфовать, применяют средства либо для предотвращения движения оси, либо для обеспечения того, чтобы результирующие движения могли инициироваться и привести к обесточенному положению контролируемым образом | Х | Х | Х | Х | Х | ||
5.1.12 | Предусмотрены функции безопасности удержания положения для предотвращения неконтролируемого или опасного выброса накопленной энергии | Х | ||||||
5.1.12 | Наклеивают этикетку, указывающую на опасность накопленной энергии | Х | Х | |||||
5.1.13 | Электрические, пневматические и гидравлические детали | |||||||
5.1.13 | Электрические части выполнены в соответствии с требованиями МЭК 60204-1 | Х | Х | Х | Х | |||
5.1.13 | Пневмооборудование реализовано в соответствии с требованиями ИСО 4414 | Х | Х | Х | Х | |||
5.1.13 | Гидравлическое оборудование реализовано в соответствии с требованиями ИСО 4413 | Х | Х | Х | Х | |||
5.1.13 | Разъемы предотвращают ошибочное соединение, когда это может привести к опасной ситуации. При невозможности, разъемы маркируют | Х | Х | Х | Х | |||
5.1.13 | Разъемы, которые могут представлять опасность, если они разделены или разорваны, спроектированы и изготовлены таким образом, чтобы предотвратить непреднамеренное разъединение | Х | Х | Х | Х | |||
5.1.14 | Настройка центральной точки инструмента (TCP) | |||||||
5.1.14 | Возможность ввода параметра TCP предоставляется, если это необходимо для функции безопасности | Х | Х | Х | Х | |||
5.1.14 | Если невозможность ввести настройки TCP, может создать опасность, робот предупреждает об опасности и необходимости ввода приемлемого значения | Х | Х | Х | Х | |||
5.1.15 | Настройка полезной нагрузки | |||||||
5.1.15 | Возможность ввода параметра полезной нагрузки (5.1.15) предоставляется, если это необходимо для функции безопасности | Х | Х | Х | ||||
5.1.15 | Если невозможность ввести настройки полезной нагрузки может создать опасность, робот предупреждает об опасности и необходимости ввода приемлемого значения | Х | Х | Х | ||||
5.1.16 | Информационная безопасность | |||||||
5.1.16 | Оценка информационной безопасности | Х | Х | |||||
5.1.16 | Если угроза может привести к риску(ам) (безопасности), обеспечивают меры по поддержке информационной безопасности | Х | Х | Х | ||||
5.1.16 | Меры включают средства предотвращения несанкционированного доступа к роботу, его оборудованию, программному обеспечению, данным конфигурации и прикладной программе робота | Х | Х | Х | ||||
5.1.17 | Класс робота | |||||||
5.1.17 | Роботы классифицируют как класс II в соответствии с таблицей 1, если испытания не определены как класс I | Х | Х | Х | Х | |||
5.1.17 | Роботы класса I испытывают, и результаты испытаний предоставляют с учетом максимальной производительности манипулятора, не ограничиваемой функциями управления роботом или функциями безопасности, максимальной достижимой скорости TCP, эффективной массы движущихся частей манипулятора и максимальной достижимой силой на манипулятор в соответствии с приложением E | Х | Х | Х | ||||
5.1.17 | Определена и предусмотрена общая масса движущихся частей манипулятора | Х | Х | Х | ||||
5.1.17 | Робот класса II соответствует требованиям, включая функциональную безопасность в соответствии с 5.3 | Х | Х | Х | Х | |||
5.2 | Управление роботом | |||||||
5.2.1 | Спроектирован таким образом, что предсказуемая человеческая ошибка во время эксплуатации не приводит к опасным ситуациям | Х | Х | Х | ||||
5.2.2 | Защита от неожиданного пуска | |||||||
5.2.2 | Средства управления внедрены и/или расположены для предотвращения неожиданного пуска и соответствуют ИСО 14118 | Х | Х | Х | Х | |||
5.2.2 | Неожиданный пуск из-за команды "старт", которая является результатом сбоя в системе управления или внешнего воздействия на нее в соответствии с требованиями 5.3 и 5.4 | Х | Х | Х | ||||
5.2.2 | Неожиданный пуск из-за команды "пуск", сгенерированной несоответствующим действием на устройстве управления пуском или на других частях машины, таких как датчик или элемент управления мощностью, предотвращается функцией блокировки перезапуска в соответствии с 5.4 | Х | Х | Х | ||||
5.2.2 | Неожиданный пуск из-за восстановления электропитания после прерывания предотвращается функцией блокировки пуска в соответствии с 5.4 | Х | Х | Х | ||||
5.2.3 | Сингулярность | |||||||
5.2.3 | До появления особенности или робот генерирует повторяемые движение и скорость; или выполнение программы задачи останавливается; или робот генерирует звуковой или видимый предупреждающие сигналы и продолжает движение при пониженной скорости | Х | Х | Х | Х | Х | ||
5.2.4 | Функции блокировки | |||||||
5.2.4 | Связанные с защитными ограждениями соответствуют приведенным в ИСО 14119 | Х | Х | Х | ||||
5.2.5 | Устройства индикации и оповещения состояния | |||||||
5.2.5 | Состояние робота четко указано (например, включение питания, обнаружение неисправности, режим, автоматическая работа в процессе, прямое управление, внешнее управление) | Х | Х | Х | ||||
5.2.5 | Индикаторы подходят для установленного местоположения и соответствуют требованиям МЭК 60204-1 | Х | Х | Х | Х | |||
5.2.5 | При наличии, предупреждающие устройства (например, звуковые и визуальные) соответствуют приведенным в ИСО 12100, МЭК 60204-1 и МЭК 60073 | Х | Х | Х | Х | |||
5.2.6 | Этикетирование | |||||||
5.2.6 | Элементы управления, включая индикаторы и дисплеи, маркируют для четкого указания их функции в соответствии с МЭК 60204-1 (приложение F) | Х | Х | |||||
5.2.7 | Единая точка управления | |||||||
5.2.7.1 | Общие сведения | |||||||
5.2.7.1 | Осуществляется путем удостоверения подлинности связи в соответствии с 5.1.16 или в качестве функции безопасности в соответствии с 5.3 | Х | Х | Х | ||||
5.2.7.2 | Прямой контроль | |||||||
5.2.7.2 | При наличии прямой контроль с помощью мобильного пульта осуществляется в соответствии с 5.2.6.1 | Х | Х | Х | ||||
5.2.7.2 | При прямом контроле инициация движения робота, изменения программы, изменения конфигурации безопасности, смена управления на другой пульт управления, и обновления программы управления не могут быть получены от внешних пультов управления | Х | Х | Х | Х | |||
5.2.7.2 | Активация прямого контроля на постоянной основе переопределяет любые другие источники управления | Х | Х | Х | Х | |||
5.2.7.2 | Активация прямого контроля является результатом преднамеренного действия на конкретное устройство управления на пульте управления | Х | Х | Х | Х | |||
5.2.7.3 | Внешнее управление | |||||||
5.2.7.3 | Если средства для программирования не предусмотрены, требуются внешние средства (например, при подключении к компьютеру), они считаются средствами внешнего управления | Х | Х | |||||
5.2.7.3 | Для включения внешнего управления требуется преднамеренное действие | Х | Х | Х | Х | |||
5.2.7.3 | Включение прямого контроля приводит к немедленному отключению любого внешнего управления | Х | Х | Х | Х | |||
5.2.8 | Режимы | |||||||
5.2.8.1 | Автоматический | |||||||
5.2.8.1 | Робот имеет функцию автоматического режима, в котором выполняет программу задач и в котором соответствующие настроенные функции безопасности активны | Х | Х | Х | ||||
5.2.8.1 | При обнаружении какого-либо условия остановки все подвижные части робота останавливаются | Х | Х | |||||
5.2.8.1 | Автоматическая работа не запускается до тех пор, пока оператор не предоставит отдельное подтверждение | Х | Х | Х | ||||
5.2.8.2 | Ручной | |||||||
5.2.8.2.1 | Общие сведения | |||||||
5.2.8.2.1 | Движения робота возможны только с помощью пульта управления, который является единой точкой управления роботом | Х | Х | Х | ||||
5.2.8.2.2 | Пониженная скорость | |||||||
5.2.8.2.2 | Робот имеет пониженную скорость ручного режима для трассировки, обучения, программирования и верификации программ | Х | Х | Х | Х | |||
5.2.8.2.2 | Движения робота возможны только во время приведения в действие устройства включения и с пониженной скоростью (см. 5.5.2.1) | Х | Х | Х | ||||
5.2.8.2.2 | Автоматическое управление предотвращается, когда робот находится в ручном режиме | Х | Х | Х | ||||
5.2.8.2.3 | Высокоскоростной | |||||||
5.2.8.2.3 | При наличии высокоскоростного ручного режима предусмотрены средства выбора высокоскоростного ручного режима в соответствии с 5.6.3 | Х | Х | Х | Х | |||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим, робот имеет средства для ручного увеличения скорости от начального значения в несколько шагов | Х | Х | Х | Х | |||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим, робот имеет дисплей, отражающий фактическую скорость | Х | Х | Х | ||||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим, робот имеет функцию безопасности с контролируемой активной скоростью в соответствии с 5.5.2.2 | Х | Х | Х | ||||
5.2.8.2.3 | При наличии высокоскоростного ручного режима робот имеет управление старт/стоп в сочетании с устройством включения в соответствии с 5.5.3 | Х | Х | Х | Х | |||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим, он имеет ограничение скорости не больше установленного пониженного скоростного: - при выборе или ручной высокоскоростной активации; - когда устройство включения в соответствии с 5.5.3 повторно инициируется путем помещения устройства включения в положение с включенной центральной частью после того, как было отпущено или полностью сжато | Х | Х | Х | Х | Х | ||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим и если разрешающее устройство отпускается на 5 мин или более, возобновление ранее выбранной более высокой скорости требует отдельного преднамеренного действия | Х | Х | Х | ||||
5.2.8.2.3 | Когда предусмотрен высокоскоростной ручной режим, робот имеет функцию безопасности, указывающую, когда робот находится в ручном высокоскоростном режиме | Х | Х | Х | ||||
5.2.8.3 | Выбор, активация и изменение режима работы | |||||||
5.2.8.3 | Выбор требует преднамеренного действия, например переключения клавиш | Х | Х | Х | Х | |||
5.2.8.3 | Выбранный режим четко идентифицируется, однозначно указывается, виден или отображается | Х | Х | Х | Х | |||
5.2.8.3 | Переключение между режимами приводит к защитной остановке; инициирование движения в соответствии с 5.5.1 для пуска и перезапуска | Х | Х | Х | ||||
5.2.8.3 | Когда изменение режима приведет к изменению активных мер по снижению риска, выбор режима является функцией безопасности | Х | Х | Х | ||||
5.2.8.3 | Средства обеспечения того, чтобы одновременно активен только один режим работы | Х | Х | Х | ||||
5.2.8.3 | Каждый режим имеет необходимые меры по снижению риска, действующие для этого режима | Х | Х | Х | ||||
5.2.8.3 | Активация выбранного режима не инициирует движение робота или другие опасности | Х | Х | |||||
5.2.8.3 | Если предусмотрены, то дополнительные выходы для индикации выбранного режима в целях безопасности соответствуют требованиям 5.3 | Х | Х | |||||
5.2.9 | Средства управления роботом | |||||||
5.2.9.1 | Общие сведения | |||||||
5.2.9.1 | Робот имеет средства для контроля, управления, программирования/обучения, настройки и устранения неполадок робота, например мобильный пульт или другой(ие) пульт(ы) управления | Х | Х | Х | ||||
5.2.9.1 | Средства предоставляются на пульте управления или мобильном пульте либо имеют возможность внешнего управления и соответствующее подключение (кабельное или беспроводное) | Х | Х | Х | ||||
5.2.9.1 | Каждый пульт управления или мобильный пульт имеет устройство аварийной остановки в соответствии с 4.3.5 ИСО 13850:2015 для инициирования функции аварийной остановки согласно 5.4.2 | Х | Х | Х | ||||
5.2.9.1 | Любой мобильный пульт, который может инициировать движение или вызывать движение(я), имеет функцию включения и устройство включения 3P в соответствии с 5.5.3 | Х | Х | Х | ||||
5.2.9.1 | Роботы класса 1 без устройства включения имеют вход функции безопасности для интеграции внешнего устройства поддержки 3P | Х | Х | |||||
5.2.9.1 | Роботы класса 1 спроектированы таким образом, что предсказуемые задачи робота могут быть безопасно выполнены без устройства включения 3P, если не могут быть выполнены, то устройство включения 3P предоставляется вместе с роботом | Х | Х | Х | Х | Х | Х | |
5.2.9.1 | Мобильные пульты и пульты управления соответствуют требованиям МЭК 61310-1:2007, МЭК 61310-2:2007 и МЭК 61310-3:2007 | Х | Х | Х | ||||
5.2.9.1 | Визуальный сигнал на пульте управления указывает на активное состояние пульта управления | Х | Х | Х | ||||
5.2.9.1 | Для роботов с возможностью внешнего управления пульт управления (в том числе мобильный пульт) обеспечивается указание на то, что внешний контроль активен | Х | Х | Х | ||||
5.2.9.1 | Если пульты управления установлены на роботе-манипуляторе или внутри него, одно или несколько средств снижения риска в соответствии с 5.12 применяют для ручного управления (HGC) и/или ограничения мощности и усилия (PFL) | Х | Х | |||||
5.2.9.2 | Мобильные пульты | |||||||
5.2.9.2 | Масса и размер мобильных пультов не приводит к усталости и дискомфорту, полученным в результате использования | Х | Х | |||||
5.2.9.2 | Мобильные пульты снабжены средствами или инструкциями по размещению или укладке, чтобы свести к минимуму возможность повреждения, которое может привести к опасности, и по укладке кабелей, если это применимо, для уменьшения опасности запутывания и спотыкания | Х | Х | |||||
5.2.9.3 | Бескабельный или съемный мобильные пульт(ы) | |||||||
5.2.9.3 | Предусмотрена визуальная индикация, чтобы показать, что мобильный пульт активен | Х | Х | Х | Х | |||
5.2.9.3 | Предусмотрена визуальная индикация, указывающая на робота, к которому подключен мобильный пульт | Х | Х | |||||
5.2.9.3 | Потеря связи, связанной с безопасностью, приводит к защитной остановке для всех роботов, управляемых в ручном(ных) режиме(ах) | Х | Х | Х | ||||
5.2.9.3 | Восстановление связи, связанной с безопасностью, требует отдельного преднамеренного действия для возобновления движения робота | Х | Х | |||||
5.2.9.3 | Устройство аварийной остановки в соответствии с ИСО 13850:2015, 4.3.8 | Х | Х | |||||
5.2.9.3 | Предусмотрены однозначные средства для подключения и отключения управления роботом от мобильного пульта (например, разрешающее действие оператора) | Х | Х | Х | Х | |||
5.2.9.3 | Беспроводная связь, связанная с безопасностью, для мобильного пульта (например, радио, инфракрасная) соответствует МЭК 62745 | Х | Х | |||||
5.2.9.3 | Предусмотрены средства для предотвращения путаницы между активными и неактивными устройствами аварийной остановки | Х | Х | Х | Х | Х | ||
5.2.10 | Средства инициирования автоматической работы | |||||||
5.2.10 | Управление роботом не запускает автоматическую работу до тех пор, пока не будет предоставлено отдельное подтверждение | Х | Х | Х | ||||
5.2.10 | Робот предоставляет средства для пуска автоматической работы с устройства управления, кроме мобильного пульта | Х | Х | Х | ||||
5.2.10 | Робот предоставляет средства для предотвращения автоматического управления роботом только с помощью мобильного пульта | Х | Х | Х | ||||
5.3 | Функции безопасности | |||||||
5.3.1 | Общие сведения | |||||||
5.3.1 | Системы управления, связанные с безопасностью, соответствуют требованиям 5.3 и приложения С | Х | Х | |||||
5.3.1 | Выполнение всех функций безопасности робота предусмотрено в информации для использования согласно приложению D | Х | Х | |||||
5.3.2 | Стандарты функциональной безопасности | |||||||
5.3.2 | SRP/CS (или SCS) спроектированы в соответствии с ИСО 13849-1 или МЭК 62061 | Х | Х | Х | ||||
5.3.3 | Эффективность | |||||||
5.3.3 | Минимальные показатели функциональной безопасности для функций безопасности - , категория 3 (ИСО 13849-1:2015), или SIL 2, HFT=1 со временем эксплуатации не менее 20 лет, в соответствии с МЭК 62061:2015; или или SIL 2 с < 4,43 ·10 1/ч; если не указан другой критерий для конкретного класса роботов (5.1.17, таблица 1) и для конкретной функции безопасности в соответствии с таблицей 3 | Х | Х | |||||
5.3.3 | При наличии, связанные с безопасностью и с функцией безопасности или SIL 2 входы и выходы, являются избыточными и могут быть интегрированы в систему управления с избыточной архитектурой | Х | Х | |||||
5.3.4 | Обнаружение отказов или неисправностей | |||||||
5.3.4 | Любой сбой системы управления, связанной с безопасностью, или обнаруженные неисправности функции безопасности приводят к остановке категории 0 или 1 в соответствии с МЭК 60204-1 | Х | Х | |||||
5.3.4 | Срабатывание функции безопасности приводит к определенному(ым) результату(ам) в соответствии с приложением С | Х | Х | Х | ||||
5.3.5 | Параметризация функций безопасности | |||||||
5.3.5 | Робот обладает средствами и возможностями для программной параметризации прикладного программного обеспечения, связанного с безопасностью, и для разработки прикладного программного обеспечения, связанного с безопасностью | Х | Х | |||||
5.3.5 | Параметризация имеет аспект, связанный с безопасностью, как указано в ИСО 13849-1:2015, 4.6.4, или МЭК 62061:2015, 6.11.2 | Х | ||||||
5.3.5 | Программные онлайн-инструменты, определенные в МЭК 61508-4:2010, 3.2.10, не используют | Х | Х | |||||
5.3.5 | Активированные функции безопасности постоянно активны при включении питания | Х | Х | Х | ||||
5.3.5 | Перезапуск управления роботом требуется после ручного изменения параметров, связанных с безопасностью | Х | Х | Х | ||||
5.3.5 | Изменения параметров, связанных с безопасностью, не могут быть перенастроены во время автоматического выполнения программы задач | Х | ||||||
5.3.5 | Параметры функции безопасности генерируют идентификатор, чтобы можно было идентифицировать изменения настроек | Х | Х | |||||
5.3.5 | Информация об активных настройках и конфигурации функций безопасности может быть изучена и задокументирована | Х | Х | Х | ||||
5.3.6 | Связь | |||||||
5.3.6 | При использовании передачи данных при реализации функции безопасности применяют требования МЭК 61508-2:2010, 7.4.11 | Х | Х | |||||
5.3.6 | Когда робот имеет внутреннюю сеть роботов, сеть является сетью передачи категории 1 в соответствии с таблицей 2 | Х | Х | |||||
5.3.6 | При наличии у робота внешней сети роботов данная сеть относится к категории 2 или 3 в соответствии с таблицей 2 | Х | Х | |||||
5.3.7 | Электромагнитная совместимость (ЭМС) | |||||||
5.3.7 | ЭМС, связанная с безопасностью (т.е. устойчивость и излучение), соответствует требованиям к электромагнитным помехам (EMI) и ЭМС ИСО 13849-1 или МЭК 62061 | Х | Х | Х | Х | |||
5.4 | Функции остановки робота | |||||||
5.4.1 | Общие сведения | |||||||
5.4.1 | Робот имеет защитную функцию остановки, независимую функцию аварийной остановки и другие функции остановки | Х | Х | |||||
5.4.1 | Функции остановки имеют возможность подключения внешних защитных устройств | Х | Х | |||||
5.4.1 | Робот спроектирован таким образом, что функции остановки имеют приоритет над другими функциями управления | Х | Х | |||||
5.4.1 | После инициирования функции остановки другие функции управления не включают движение робота до тех пор, пока не будет достигнуто условие остановки | Х | Х | |||||
5.4.1 | Показатели функциональной безопасности соответствуют 5.3 | Х | Х | |||||
5.4.2 | Аварийная остановка | |||||||
5.4.2.1 | Общие сведения | |||||||
5.4.2.1 | Робот имеет одну функцию аварийной остановки, категории остановки 0 или 1, в соответствии с МЭК 60204-1 | Х | Х | |||||
5.4.2.1 | Функция(и) аварийной остановки и устройство(а) соответствуют ИСО 13850 | Х | Х | Х | ||||
5.4.2.1 | Функция аварийной остановки имеет приоритет над другими функциями управления и остановки робота | Х | Х | Х | ||||
5.4.2.1 | Функция аварийной остановки учитывает все опасности в пределах области управления остановки | Х | Х | Х | ||||
5.4.2.1 | Функция аварийной остановки отключает питание привода от привода робота | Х | Х | Х | ||||
5.4.2.1 | Функция аварийной остановки остается активной до тех пор, пока она не будет сброшена | Х | Х | Х | ||||
5.4.2.1 | Функция аварийной остановки сбрасывается только ручным действием, которое не вызывает перезагрузку после сброса, а только допускает перезагрузку | Х | Х | Х | ||||
5.4.2.1 | Робот имеет возможность подключения внешнего входа аварийной остановки для использования роботизированной системой | Х | Х | Х | Х | |||
5.4.2.2 | Пульт управления и мобильный пульт | |||||||
5.4.2.2 | Каждый пульт управления роботом и мобильный пульт, способный инициировать движение робота или другие опасные ситуации, имеют функцию аварийной остановки с ручным управлением | Х | Х | Х | ||||
5.4.2.3 | Вход аварийной остановки | |||||||
5.4.2.3 | Вход(ы) функции безопасности для аварийной остановки остается(ются) в работе при выключении, а затем при включении питания | Х | ||||||
5.4.2.4 | Выход аварийной остановки | |||||||
5.4.2.4 | Когда предусмотрен выход функции безопасности, выход остается работоспособным, когда питание привода выключено, а затем включено | Х | Х | |||||
5.4.3 | Защитный упор | |||||||
5.4.3.1 | Общие сведения | |||||||
5.4.3.1 | Робот имеет одну или несколько защитных функций остановки, которые могут быть инициированы внутренней функцией безопасности или внешним(и) защитным(и) устройством(ами) | Х | Х | Х | ||||
5.4.3.1 | Функция остановки вызывает остановку всего движения робота | Х | Х | Х | ||||
5.4.3.1 | Функция остановки является стоп-категорией 0, 1 или 2 в соответствии с МЭК 60204-1 | Х | Х | Х | ||||
5.4.3.1 | Если функция остановки является остановкой категории 2 в соответствии с МЭК 60204-1, это приводит к контролируемой остановке в соответствии с 5.4.3.3 | Х | Х | |||||
5.4.3.1 | Функция остановки приводит робота в безопасное состояние | Х | Х | |||||
5.4.3.1 | Если робот поставляется без разрешающего устройства, функция остановки активна во всех режимах постоянно | Х | Х | Х | Х | |||
5.4.3.2 | Выход защитной остановки | |||||||
5.4.3.2 | Когда предусмотрен выход функции безопасности для защитной остановки, выход продолжает функционировать или генерировать защитную остановку при отключении питания | Х | Х | Х | Х | |||
5.4.3.3 | Контролируемая остановка | |||||||
5.4.3.3 | Контролируемая остановка производится, когда требуется предотвратить непреднамеренное движение робота после остановки робота в соответствии с категорией 2 МЭК 60204-1:2016 | Х | Х | Х | ||||
5.4.3.3 | Любое непреднамеренное движение робота в контролируемом состоянии остановки приводит к остановке категории 0 или 1 в соответствии с МЭК 60204-1:2016 | Х | Х | Х | ||||
5.4.3.3 | Контролируемая остановка предусмотрена для роботов с ручным управлением в соответствии с 5.12.2, без возможностей PFL в соответствии с 5.12.4 | Х | Х | Х | ||||
5.4.3.3 | Для роботов с ограничением мощности и усилия предусмотрена контролируемая остановка в соответствии с 5.12.4 | Х | Х | Х | ||||
5.4.3.3 | Контролируемая остановка предусмотрена для одновременного движения (5.8) | Х | Х | Х | ||||
5.4.3.3 | Когда обеспечивается контролируемая остановка, у робота есть выход функции безопасности, который сигнализирует о том, что остановка робота контролируется | Х | Х | Х | ||||
5.4.4 | Другая остановка | |||||||
5.4.4 | У робота есть средства для пуска функции остановки | Х | Х | |||||
5.4.4 | Пульт управления, способный инициировать движение в автоматическом режиме, имеет возможность останавливать движение | Х | Х | |||||
5.5 | Другие функции безопасности | |||||||
5.5.1 | Пуск и перезапуск блокировки | |||||||
5.5.1.1 | Блокировка пуска | |||||||
5.5.1.1 | Система управления роботом имеет функцию блокировки пуска для предотвращения автоматического пуска при ручном режиме и включении или прерывании и восстановлении энергоснабжения | Х | Х | |||||
5.5.1.1 | Сброс функции блокировки пуска возможен только при преднамеренном срабатывании конкретного устройства управления на пульте управления робота | Х | Х | Х | ||||
5.5.1.2 | Блокировка перезапуска | |||||||
5.5.1.2 | Система управления роботом имеет функцию блокировки перезапуска для предотвращения автоматического перезапуска робота после смены режима работы, с автоматического режима на ручной, с пониженной скорости ручного режима на высокоскоростной ручной режим и с высокоскоростного ручного режима на пониженную скорость ручного режима, а также от режимов, описанных в 5.6, к другим режимам, и наоборот | Х | Х | Х | ||||
5.5.1.2 | Сброс блокировки перезапуска требует преднамеренного срабатывания конкретного устройства управления на пульте управления робота | Х | Х | Х | Х | |||
5.5.1.2 | Контрольное устройство не такое, как контрольное устройство, используемое для сброса пусковой блокировки (5.5.1.1) | Х | Х | Х | ||||
5.5.2 | Контроль скоростного режима | |||||||
5.5.2.1 | Пониженная скорость | |||||||
5.5.2.1 | Робот имеет функцию безопасности с пониженной скоростью, позволяющую ограничить скорость(и) до 250 мм/с или менее | Х | Х | Х | ||||
5.5.2.1 | При активной функции безопасности на пониженной скорости скорость TCP и любой точки манипулятора не превышает 250 мм/с, включая влияние любой вспомогательной оси | Х | Х | |||||
5.5.2.1 | В качестве максимального ограничения можно выбрать скорость ниже 250 мм/с | Х | Х | Х | ||||
5.5.2.1 | Функциональные характеристики функциональной безопасности с пониженной скоростью соответствуют 5.3 | Х | Х | |||||
5.5.2.1 | Функция безопасности на пониженной скорости активируется в ручном режиме пониженной скорости | Х | Х | Х | Х | |||
5.5.2.2 | Контролируемая скорость | |||||||
5.5.2.2 | Функция безопасности с контролируемой скоростью в соответствии с 5.3 | Х | ||||||
5.5.2.2 | Когда активна функция безопасности с контролируемой скоростью, скорость TCP и любой точки манипулятора не превышает установленную (контролируемую) скорость, включая влияние любой вспомогательной оси | Х | Х | Х | ||||
5.5.2.2 | Отключение функции безопасности с контролируемой скоростью является частью параметризации в соответствии с 5.3.5 | Х | Х | Х | Х | |||
5.5.3 | Функция включения | |||||||
5.5.3.1 | Общие сведения | |||||||
5.5.3.1 | Разрешающая функция активна в ручном режиме в соответствии с 5.7.1 | Х | Х | Х | ||||
5.5.3.2 | Включение устройства | |||||||
5.5.3.2 | Разблокирующее устройство представляет собой разрешающее устройство управления трехпозиционного (3P) типа в соответствии с МЭК 60204-1:2016, 10.9, и МЭК 60947-5-8 | Х | Х | Х | ||||
5.5.3.2 | Когда в устройстве включения используют неэлектромеханические переключатели, они должны соответствовать эквивалентным требованиям | Х | Х | |||||
5.5.3.2 | Устройства включения, встроенные в мобильный пульт в соответствии с 5.7.3, трехпозиционного (3P) типа с функциональностью в соответствии с 5.5.3.3 | Х | Х | Х | ||||
5.5.3.2 | Дополнительные устройства 3P работают независимо от другой функции или другого устройства управления движением | Х | Х | Х | ||||
5.5.3.3 | Функциональность | |||||||
5.5.3.3 | Включение устройства имеет показатели функциональной безопасности в соответствии с 5.3 | Х | Х | Х | ||||
5.5.3.3 | При постоянном удерживании в центральном положении разрешающее устройство разрешает движение робота | Х | Х | Х | ||||
5.5.3.3 | Отпускание всех устройств включения на одном мобильном пульте вызывает защитную остановку | Х | Х | Х | ||||
5.5.3.3 | Освобождение любого активного устройства включения, не интегрированного в мобильный пульт, приводит к защитной остановке | Х | Х | Х | ||||
5.5.3.3 | Полное сжатие любого устройства, обеспечивающего 3P, на мобильном пульте вызывает защитную остановку в соответствии с 5.4.3 | Х | Х | Х | ||||
5.5.3.3 | Переход из полностью сжатого (сжатого OFF) в центральное положение ON не допускает движения робота | Х | Х | Х | ||||
5.5.3.3 | Движение робота разрешено только после того, как устройство включения 3P полностью освобождено (положение "release OFF") после нахождения в положении "compress OFF" | Х | Х | Х | ||||
5.5.3.3 | Движение робота не допускается до тех пор, пока устройство включения 3P не будет перемещено в положение центра (ON) | Х | Х | Х | ||||
5.5.3.3 | Для перехода из автоматического режима в ручной режим, когда разрешающее устройство находится в центральном положении ON, необходимо, чтобы разрешающее устройство было разблокировано (отпускание выключено) и повторно включено (центральное положение включено), прежде чем движение робота будет разрешено | Х | Х | Х | ||||
5.6 | Одновременное движение | |||||||
5.6 | Когда один или несколько манипуляторов связаны с одним мобильным пультом, мобильный пульт имеет возможность перемещать один или несколько манипуляторов независимо или в одновременном движении | Х | Х | Х | ||||
5.6 | В ручном режиме для одновременного включения манипуляторов каждый манипулятор выбирают перед перемещением | Х | Х | Х | ||||
5.6 | При выборе для одновременного движения все выбранные манипуляторы находятся в том же режиме работы | Х | Х | |||||
5.6 | Только выбранные манипуляторы могут перемещаться | Х | Х | Х | Х | |||
5.6 | Индикатор устанавливают в точке выбора манипуляторов, выбранных для одновременного движения в ручном режиме | Х | Х | Х | ||||
5.6 | В ручном режиме невыбранные роботы не могут быть перемещены | Х | Х | |||||
5.6 | Предотвращается неожиданный пуск по 5.2.2 невыбранных роботов | Х | Х | |||||
5.7 | Ограничение движения робота | |||||||
5.7.1 | Общие сведения | |||||||
5.7.1 | Предусмотрены средства для ограничения движения робота до меньшего максимального пространства | Х | Х | Х | Х | Х | ||
5.7.1 | Средство ограничивает 3 оси наибольших перемещений | Х | Х | Х | ||||
5.7.1 | Робот соответствует требованиям 5.9.2, 5.9.3, 5.9.4 или их комбинации | Х | Х | Х | ||||
5.7.1 | Робот не выходит за пределы положения ограничивающего(их) устройства (устройств) или по достижении ограничивающего(их) устройства (устройств) инициирует защитную остановку (5.4.3) | Х | Х | Х | Х | Х | ||
5.7.1 | Ограничивающее(ие) устройство(а) имеет(ют) возможность останавливать движение робота при максимальной полезной нагрузке, максимальной скорости, и наихудшем положении, которая приводит к максимальному напряжению для ограничивающего(их) устройства (устройств) | Х | Х | Х | Х | Х | ||
5.7.1 | Предел движения находится в фактическом ожидаемом положении после достижения механического ограничивающего устройства, включая динамические перерегулирование или деформацию; или в фактическом ожидаемом положении остановки, учитывающем прохождение тормозного пути после достижения любого положения срабатывания электромеханического ограничивающего устройства или мягкой оси и положения ограничения пространства или плоскости, где результатом является защитная остановка; или на мягкой оси и в положении ограничения пространства, когда тормозной путь учитывается непосредственно функцией | Х | Х | Х | Х | |||
5.7.2 | Устройства механического ограничения оси | |||||||
5.7.2 | Когда мягкая ось и функция безопасности, ограничивающая пространство, не предусмотрены, робот имеет приспособления для присоединения и интеграции регулируемых механических или электромеханических ограничивающих устройств | Х | Х | Х | ||||
5.7.2 | Проверку механических упоров производят, не используя помощь при остановке | Х | Х | |||||
5.7.3 | Устройства электромеханического ограничения оси | |||||||
5.7.3 | Показатели функциональной безопасности для функций безопасности электромеханических ограничивающих устройств соответствуют требованиям 5.3 | Х | Х | |||||
5.7.3 | Программы управления роботом и программы задач не изменяют настройки электромеханического ограничительного устройства | Х | Х | |||||
5.7.4 | Мягкая ось и ограничение пространства | |||||||
5.7.4 | Функции безопасности, обеспечивающие мягкую ось и ограничение пространства, соответствуют требованиям 5.3 | Х | Х | |||||
5.7.4 | Во время выхода из любой защитной остановки, когда положение робота находится за пределами мягкой оси и ограничения функции безопасности, ограничивающей пространство, робот находится в ручном режиме с пониженной скоростью, как описано в 5.6.2.2 | Х | Х | |||||
5.7.4 | Настройки для мягких ограничений оси и пространства являются параметрами безопасности в соответствии с 5.3.5 | Х | ||||||
5.7.5 | Динамическое ограничение | |||||||
5.7.5 | При наличии, динамическое ограничение соответствует 5.3 | Х | Х | Х | Х | Х | ||
5.8 | Движение без привода | |||||||
5.8 | Предусмотрены средства для перемещения осей без использования мощности привода в аварийных или нештатных ситуациях, и предоставлены инструкции | Х | Х | Х | Х | Х | ||
5.8 | При практической возможности перемещение осей осуществляется одним оператором | Х | Х | |||||
5.8 | Средства легко доступны, но защищены от непреднамеренного срабатывания | Х | ||||||
5.8 | Когда перемещение осей может быть выполнено вручную, информация для использования включает в себя, будет ли повреждение робота и когда потребуется ремонт, прежде чем возобновится использование робота | Х | ||||||
5.9 | Лазеры и лазерное оборудование | |||||||
5.9 | Когда роботы имеют встроенное лазерное оборудование, конструкция и интеграция предотвращают любое случайное излучение | Х | Х | Х | Х | |||
5.9 | Лазерное оборудование защищено таким образом, что предотвращаются опасные ситуации из-за воздействия эффективного излучения, излучения, образующегося при отражении или диффузии, и вторичного излучения | Х | Х | Х | Х | |||
5.9 | Оптическое оборудование для наблюдения или наладки лазерного оборудования не создает опасной ситуации от его использования | Х | Х | Х | Х | |||
5.10 | Возможности для совместных применений | |||||||
5.10.2 | Ручные элементы управления (HGC) | |||||||
5.10.2 | Роботы с HGC имеют функцию безопасности с контролируемой скоростью (5.3), которую можно установить (или настроить) во время интеграции в соответствии с ИСО 10218-2 | Х | Х | |||||
5.10.2 | Роботы с HGC имеют функцию безопасности мягкого ограничения оси и пространства (5.9.4) | Х | Х | |||||
5.10.2 | Роботы с HGC имеют контролируемую остановку (5.4.3.3) | Х | Х | |||||
5.10.2 | Роботы с HGC имеют функцию безопасности устройства удержания (приложение C) | Х | Х | |||||
5.10.2 | Когда HGC имеется в наличии, вибрационные испытания проводят в соответствии с ИСО 20643:2005 | Х | Х | |||||
5.10.2 | Когда HGC предусмотрен, он расположен близко к механическому интерфейсу, где будет установлен рабочий орган робота, или будет предусмотрен для установки на таком местоположении | Х | Х | Х | ||||
5.10.2 | Когда HGC предоставлен, он имеет функцию аварийной остановки, соответствующую 5.4.2 | Х | Х | Х | Х | |||
5.10.2 | При наличии HGC в качестве функции безопасности предусмотрены элементы управления с удерживающими устройствами в соответствии с МЭК 60204-1:2016, 9.2.3.7 | Х | Х | Х | Х | |||
5.10.2 | Когда HGC предоставляется, активация (положение ON) удерживающего устройства управления обеспечивает движение | Х | Х | Х | ||||
5.10.2 | При наличии HGC деактивация (положение ВЫКЛ) удерживающего устройства управления вызывает защитный останов, а затем контролируемый останов в соответствии с 5.4.3.3 | Х | Х | Х | Х | |||
5.10.2 | Когда предоставлен HGC, удерживающие элементы управления для пуска расположены и интегрированы, поэтому оператор не может активировать (положение ВКЛ) удерживающее устройство управления для пуска, находясь между роботом и неподвижным объектом (например, без захвата или дробления) | Х | Х | Х | Х | |||
5.10.2 | Когда предоставляется HGC, он разработан с учетом пользовательского опыта управления роботом, так что защемление, раздавливание, острые края и другие риски нанесения травм, "зажатых" или "сжатых предметами", уменьшаются или устраняются | Х | Х | Х | Х | |||
5.10.3 | Мониторинг скорости и разделения (SSM) | |||||||
5.10.3 | Когда предоставлен SSM, робот поддерживает расстояние отделения от оператора(ов) в соответствии с ISO/DIS 10218-2, 5.13.6.3.2, одним или более одного: - снизить скорость робота; - изменение положения(й) и/или траектории робота | Х | Х | Х | ||||
5.10.3 | Несоблюдение расстояния разделения приводит к защитной остановке | Х | Х | Х | ||||
5.10.4 | Ограничение мощности и силы (PFL) по внутренней конструкции или функции(й) безопасности | |||||||
5.10.4 | Если PFL достигается за счет безопасной конструкции, предел фиксируется, не регулируется и не настраивается | Х | Х | Х | Х | Х | ||
5.10.4 | Если PFL достигается с помощью функций безопасности, значения PFL не превышаются во время работы, или, если они превышены, инициируется защитная остановка | Х | Х | Х | ||||
5.10.4 | Если PFL достигается с помощью функций безопасности, предусмотрены следующие функции безопасности: контролируемая скорость (5.5.2.2), мягкая ось и ограничение пространства (5.9.4) и контролируемая остановка (5.4.3.3) | Х | Х | Х | ||||
5.10.4 | Превышение любого предела параметра приводит к защитной остановке в соответствии с 5.4.3 | Х | Х | Х | ||||
5.10.4 | Функции безопасности PFL соответствуют 5.3 | Х | Х | |||||
Приложение H
(обязательное)
Измерение длительности и расстояния торможения
В этом приложении рассмотрены те роботы, у которых отсутствует(ют) функция(и) безопасности, ограничивающая(ии) время остановки или тормозной путь, вызывающая(ие) остановку до превышения предела(ов) функции безопасности. Без данных функций безопасности сведения, изложенные в приложении, могут быть использованы для определения вероятных характеристик остановки.
Примечание 1 - Для того чтобы эта информация была полезной и практичной, приведены значения для различных контролируемых пределов функции безопасности скорости и при максимально наихудших условиях.
Тестирование должно соответствовать условиям тестирования эффективности, описанным в ИСО 9283:1998, раздел 6, если применимо.
Требования к предоставляемым сведениям:
- время остановки следует определять от начала остановки до того момента, когда все движения робота прекращаются.
Примечание 2 - Это не относится к движению и другим опасностям, связанным с системой, таким как рабочий орган, заготовка(и). См. ИСО 10218-2;
- если доступны подтвержденные имитационные значения с использованием пределов функции безопасности, то можно использовать эти значения.
Примечание 3 - Эти данные могут варьироваться в зависимости от дополнительных задержек из-за особенностей и конфигурации системы управления, т.е. беспроводных пультов.
Если робот не имеет функции безопасности расстояния остановки, производитель должен указать расстояние остановки в линейных или угловых единицах, в зависимости от ситуации. Тормозной(ые) путь(и) определяют как расстояние от начала остановки до того момента, когда все движения робота прекращаются.
Для категорий остановки 0, 1 и 2 в соответствии с МЭК 60204-1 время и расстояние остановки для каждого соединения должны быть предусмотрены для следующих изменений:
- ограничения скорости функции безопасности для 33%, 66% и 100% максимальной скорости;
- полезная нагрузка 33%, 66% и 100% максимальной полезной нагрузки;
- смещение на 33%, 66% и 100% от максимального (наихудшего) смещения.
Если вероятные значения времени остановки и расстояния могут быть получены исходя из максимальных значений, то вместо вышеуказанных вариаций производитель может предоставить 100%-ные максимальные значения с уравнением для получения промежуточных значений.
Данные должны быть предоставлены для трех осей наибольшего смещения и нанесены на сетку, которая отбирается каждые 10 мс, 10 мм/с, 5% или 5°, в зависимости от ситуации. Кроме того, должны быть четко указаны точки данных и линейная интерполяция.
Приложение I
(справочное)
Дополнительные возможности
I.1 Общие сведения
Требования, указанные в настоящем стандарте, являются минимальными требованиями безопасности. Для повышения безопасности роботу можно добавить множество дополнительных возможностей и функций безопасности.
Требования к характеристикам функциональной безопасности соответствуют 5.3.
Дополнительные функции, приведенные в этом приложении, перечислены в произвольном порядке значимости или предпочтительности. Роботы, оснащенные этими возможностями, могут иметь большую гибкость в использовании и повторном применении, а также обладать большим потенциальным снижением риска в случае функций безопасности.
I.2 Выходы функции безопасности аварийной остановки
a) Возможность использования выходов функций безопасности при аварийной остановке (5.4.2.4), чтобы иметь общую аварийную остановку, когда аварийная остановка робота объединена с аварийной остановкой ячейки. См. ИСО 10218-2.
b) Возможность работы устройства аварийной остановки без питания управления роботом в соответствии с 5.4.2.
I.3 Включение функциональности устройства
a) Возможность включения выходного сигнала устройства для соединения разрешающего(их) устройства (устройств) в общую схему, управляющую несколькими роботами и оборудованием (см. 5.5.3 и 7). См. ИСО 10218-2.
b) Возможность подключения нескольких дополнительных разрешающих устройств к одной функции разрешающего устройства.
c) Функция безопасности, позволяющая приостановить работу разрешающего устройства.
I.4 Выход выбора режима
a) Возможность предоставлять информацию о выборе режима системе управления, связанной с безопасностью.
b) Выходные данные соответствуют 5.3.
I.5 Обнаружение столкновения
Для того чтобы максимально эффективно предотвратить нанесение вреда оператору(ам), робот должен останавливаться и подавать предупреждающий сигнал при обнаружении столкновения и не перемещаться в другое положение без вмешательства оператора.
I.6 Поддержание точности траектории на всех скоростях
Это ограничит предполагаемую потребность в наблюдении за движением робота с опасной позиции.
I.7 Дополнительные возможности
I.7.1 Конфигурируемое положение для функции безопасности контролируемого положения
При поставке настраиваемая функция безопасности контролируемого положения вызовет изменение состояния выхода безопасности, когда робот находится в настроенном положении. Это срабатывает, когда робот находится в контролируемой остановке в сконфигурированном контролируемом положении. См. приложение C.
I.7.2 Функция(и) безопасности при остановке или измерение, не связанное с безопасностью
При поставке робота функция безопасности для мониторинга эффективности остановки или измерение характеристик остановки для периодической проверки с целью контроля эффективности остановки [время остановки, угол остановки/расстояние(я)] должны обеспечивать ее исходя из следующих функций:
a) функция безопасности, позволяющая установить предел времени остановки и/или предел тормозного пути; или
b) возможность, которая не является функцией безопасности, которая обеспечивает следующее:
1) средство для измерения и записи эффективности остановки при следующем запросе,
2) выбор события входа для определения начала события остановки (например, изменение состояния входа устройства защиты),
3) установку пределов для предупреждения при превышении этих пределов.
В случае перечисления b) могут потребоваться периодические проверки для контроля эффективности остановки и необходимости модификации применения.
I.7.3 Функция безопасности интерфейсов реального времени
При реализации функций безопасности с оборудованием, внешним по отношению к роботу, таким как мониторинг скорости и разделения, часто бывает полезным иметь информацию в реальном времени о характеристиках робота, например положение и скорость сустава робота. Для наиболее эффективного использования такой информации, как функции безопасности, эти данные должны быть предоставлены через интерфейс безопасности.
Для некоторых функций безопасности может быть также необходимым, чтобы контроллер робота через тот же интерфейс безопасности принимал бы данные управления в реальном времени. Эти данные могут включать, но не ограничиваются, путевые точки траектории и корректировки скорости.
Все вышеперечисленные интерфейсы более эффективны, когда они реализованы с более высокой скоростью передачи данных и с низкой задержкой.
Приложение ZA
(справочное)
Взаимосвязь между европейским стандартом и основными требованиями Директивы 2006/42/EC, которые должны быть учтены
Настоящий стандарт подготовлен в соответствии с запросом Комиссии по стандартизации "Мандат M/396 для CEN и CENELEC по стандартизации в области оборудования", чтобы обеспечить единое добровольное средство соответствия основным требованиям Директивы 2006/42/EC Европейского парламента и Европейского совета от 17 мая 2006 г. по машинному оборудованию и поправки к Директиве 95/16/EC (в новой редакции).
После того как настоящий стандарт процитирован в официальном журнале Европейского союза в соответствии с этой Директивой, соответствие его нормативным положениям, приведенным в таблице ZA.1, дает в пределах области применения этого стандарта презумпцию соответствия основным требованиям этой Директивы и связанных с ней правил ЕАСТ.
Таблица ZA.1 - Соответствие между европейским стандартом и приложением I Директивы 2006/42/EC
Соответствующие основные требования Директивы 2006/42/EC | Пункт(ы)/подпункт(ы) настоящего EН | Замечания/ примечания | |
1.1.2 | Принципы интеграции безопасности | 4, 5, 6, 7.5.3, приложение G | |
1.1.3 | Материалы и изделия | 5.1.2.2 | |
1.1.5 | Проектирование машин и механизмов для облегчения их обработки | 5.1.3, 5.1.4, 7.5.18 | |
1.1.6 | Эргономика | 5.2.5, 5.2.9.1, 5.2.9.2 | |
1.2.1 | Безопасность и надежность систем управления | 5.1.2, 5.1.5, 5.1.8, 5.2.1, 5.2.2, 5.2.9.3, 5.3, 5.4.1, 5.4.3.1, 5.5.1, 5.5.3, 5.6, 5.7, приложение С | |
1.2.2 | Устройства управления | 5.1.13, 5.2.5, 5.2.7, 5.2.8.2.3, 5.2.9.1, 5.2.9.3 5.2.10, 5.4.1, 5.4.2, 5.6 | |
1.2.3 | Пуск | 5.5.1, 5.2.8.1, 5.2.8.3, 5.2.9.3 | |
1.2.4.1 | Нормальная остановка | 5.4.1, 5.4.4 | |
1.2.4.2 | Эксплуатационная остановка | 5.4.3.3 | |
1.2.4.3 | Аварийная остановка | 5.2.9.3, 5.4.1, 5.4.2, 5.10.1, 5.10.2 | |
1.2.5 | Выбор режимов управления или работы | 5.2.8.2, 5.2.8.3 | |
1.2.6 | Выход из строя блока питания | 5.1.8, 5.1.10, 5.3, 5.5.1.1 | |
1.3.1 | Риск потери стабильности | 5.1.2, 5.1.3, 5.1.5, 7.5.4 | |
1.3.2 | Риск поломки во время эксплуатации | 5.1.2, 5.1.11, 5.1.13, 7.5.15 | |
1.3.4 | Риски, связанные с поверхностями, краями или углами | 5.1.2.4, 5.10.2 | |
1.3.7 | Риски, связанные с движущимися частями | 5.1.2.4, 7.5.17 | |
1.3.8 | Выбор защиты от риска, связанного с движущимися частями | 5.1.2.4 | |
1.3.8.1 | Подвижные части трансмиссии | 5.1.2.4, 5.2.4 | |
Предупреждение 1 - Презумпция соответствия остается в силе только до тех пор, пока ссылка на европейский стандарт сохраняется в списке, опубликованном в официальном журнале Европейского союза. Пользователи этого стандарта должны своевременно обращаться к последнему списку, опубликованному в официальном журнале Европейского союза.
Предупреждение 2 - К продуктам, подпадающим под действие этого стандарта, могут быть применены другие законодательные акты Европейского союза.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным и межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 4413:2010 | - | * |
ISO 4414:2010 | - | * |
ISO 7010:2019 | - | * |
ISO 12100:2010 | IDT | ГОСТ ISO 12100-2013 "Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска" |
ISO 13732-1:2006 | IDT | ГОСТ Р ИСО 13732-1-2015 "Эргономика термальной среды. Методы оценки реакции человека при контакте с поверхностями. Часть 1. Горячие поверхности" |
ISO 13849-1:2015 | IDT | ГОСТ ISO 13849-1-2014 "Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования" |
ISO 13850:2015 | - | * |
ISO 14118:2017 | - | * |
ISO 14119:2013 | - | * |
ISO 14120:2015 | - | * |
ISO 19353:2019 | - | * |
ISO 20607:2019 | - | * |
ISO 20643:2005 | MOD | ГОСТ 16519-2006 (ИСО 20643:2005) "Вибрация. Определение параметров вибрационной характеристики ручных машин и машин с ручным управлением. Общие требования" |
IEC 60204-1:2016 | IDT | ГОСТ Р МЭК 60204-1-2007 "Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования" |
IEC 60947-5-8:2006 | MOD | ГОСТ Р 50030.5.8-2013 (МЭК 60947-5-8:2006) "Аппаратура распределения и управления низковольтная. Часть 5-8. Аппараты и элементы коммутации для цепей управления. Трехпозиционные переключатели с функцией разблокирования" |
IEC 61310-1:2007 | - | * |
IEC 61310-2:2007 | IDT | ГОСТ IEC 61310-2-2016 "Безопасность машинного оборудования, индикация, маркировка и приведение в действие. Часть 2. Требования для маркировки" |
IEC 61310-3:2007 | - | * |
IEC 61508-2:2010 | IDT | ГОСТ Р МЭК 61508-2-2012 "Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 2. Требования к системам" |
IEC 62061:2015 | IDT | ГОСТ Р МЭК 62061-2015 "Безопасность оборудования. Функциональная безопасность систем управления электрических, электронных и программируемых электронных, связанных с безопасностью" |
IEC 62745:2017 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. | ||
Библиография
[1] | ISO/IEC Guide 51, Safety aspects - Guidelines for their inclusion in standards |
[2] | ISO 3864-1, Graphical symbols - Safety colours and safety signs - Part 1: Design principles for safety signs and safety markings |
[3] | ISO 3864-2, Graphical symbols - Safety colours and safety signs - Part 2: Design principles for product safety labels |
[4] | ISO 3864-3, Graphical symbols - Safety colours and safety signs - Part 3: Design principles for graphical symbols for use in safety signs |
[5] | ISO 3864-4, Graphical symbols - Safety colours and safety signs - Part 4: Colorimetric and photometric properties of safety sign materials |
[6] | ISO 7000, Graphical symbols for use on equipment - Registered symbols |
[7] | ISO 7010, Graphical symbols - Safety colours and safety signs - Registered safety signs |
[8] | ISO 8373:2012, Robots and robotic devices - Vocabulary |
[9] | ISO 9283:1998, Manipulating industrial robots - Performance criteria and related 2062 test methods |
[10] | ISO 9409 (all parts), Manipulating industrial robots - Mechanical interfaces |
[11] | ISO 9946, Manipulating industrial robots - Presentation of characteristics |
[12] | ISO 10218-2-1, Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration |
[13] | ISO 13849-2, Safety of machinery - Safety-related parts of control systems - Part 2: Validation |
[14] | ISO 13850, Safety of machinery - Emergency stop function - Principles for design |
[15] | ISO 13851, Safety of machinery - Two-hand control devices - Principles for design 2071 and selection |
[16] | ISO 13854, Safety of machinery - Minimum gaps to avoid crushing of parts of the human body |
[17] | ISO 13855, Safety of machinery - Positioning of safeguards with respect to the approach speeds of parts of the human body |
[18] | ISO 13856 (all parts), Safety of machinery - Pressure-sensitive protective devices |
[19] | ISO 13857, Safety of machinery - Safety distances to prevent hazard zones being reached by upper and lower limbs |
[20] | ISO 14118, Safety of machinery - Prevention of unexpected start-up |
[21] | ISO 14119, Safety of machinery - Interlocking devices associated with guards - Principles for design and selection |
[22] | ISO 14120, Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards |
[23] | ISO 14123-1, Safety of machinery - Reduction of risks to health resulting from hazardous substances emitted by machinery - Part 1: Principles and specifications for machinery manufacturers |
[24] | ISO 14123-2, Safety of machinery - Reduction of risks to health resulting from 2088 hazardous substances emitted by machinery - Part 2: Methodology leading to verification procedures |
[25] | ISO 14159, Safety of machinery - Hygiene requirements for the design of machinery |
[26] | ISO 14738, Safety of machinery - Anthropometric requirements for the design of workstations at machinery |
[27] | ISO 19353, Safety of machinery - Fire prevention and fire protection |
[28] | ISO 20607, Safety of machinery - Instruction handbook - General drafting principles |
[29] | ISO/TR 23849, Guidance on the application of ISO 13849-1 and IEC 62061 in the design of safety-related control systems for machinery |
[30] | ISO 29262, Production equipment for microsystems - Interface between end effector and handling system |
[31] | ISO 31000, Risk management - Guidelines |
[32] | EN 614 (all parts), Safety of machinery - Ergonomic design principles |
[33] | EN 563, Safety of machinery - Temperatures of touchable surfaces - Ergonomics data to establish temperature limit values for hot surfaces |
[34] | EN 1093 (all parts), Safety of machinery - Evaluation of the emission of airborne hazardous substances |
[35] | EN 1127-1, Explosive atmospheres - Explosion prevention and protection - Part 1: Basic concepts and methodology |
[36] | EN 1127-2, Explosive atmospheres - Explosion prevention and protection - Part 2: 2109 Basic concepts and methodology for mining |
[37] | EN 1837, Safety of machinery - Integral lighting of machines |
[38] | EN 12198 (all parts), Safety of machinery - Assessment and reduction of risks arising from radiation emitted by machinery |
[39] | EN 50159, Railway applications - Communication, signalling and processing systems - Safety-related communication in transmission systems |
[40] | ISO/TR 23849, Guidance on the application of ISO 13849-1 and IEC 62061 in the design of safety-related control systems for machinery |
[41] | IEC 31010, Risk management - Risk assessment techniques |
[42] | IEC 60073, Basic and safety principles for man-machine interface, marking and identification - Coding principles for indicators and actuators |
[43] | IEC 60204-1, Safety of machinery - Electrical equipment of machines - Part 1: General requirements |
[44] | IEC 60269 (all parts), Low-voltage fuses |
[45] | IEC 60947 (all parts), Low-voltage switchgear and controlgear |
[46] | IEC 60364-7-729, Low-voltage electrical installations - Part 7-729: Requirements for special installations or locations - Operating or maintenance gangways |
[47] | IEC 60812, Failure modes and effects analysis (FMEA and FMECA) |
[48] | IEC 61000-6-2, Electromagnetic compatibility (EMC) - Part 6-2: Generic standards - Immunity for industrial environments |
[49] | IEC 61000-6-4, Electromagnetic compatibility (EMC) - Part 6-4: Generic standards - Emission standard for industrial environments |
[50] | IEC 61496-2, Safety of machinery - Electro-sensitive protective equipment - 2132 Part 2: Particular requirements for equipment using active opto-electronic protective devices (AOPDs) |
[51] | IEC 61800-5-2, Adjustable speed electrical power drive systems - Part 5-2: Safety requirements - Functional |
[52] | IEC 61310-1, Safety of machinery - Indication, marking and actuation - Part 1: Requirements for visual, acoustic and tactile signals |
[53] | IEC 61496 (all parts), Safety of machinery - Electro-sensitive protective equipment |
[54] | IEC 61496-2, Safety of machinery - Electro-sensitive protective equipment - Part 2: Particular requirements for equipment using active opto-electronic protective devices (AOPDs) |
[55] | IEC 61496-3, Safety of machinery - Electro-sensitive protective equipment - Part 3: Particular requirements for Active Opto-electronic Protective Devices responsive to Diffuse Refection (AOPDDR) |
[56] | IEC/TR 61496-4, Safety of machinery - Electro-sensitive protective equipment - Part 4: Particular requirements for equipment using vision based protective devices (VBPD) |
[57] | IEC 61508 (all parts), Functional safety of electrical/electronic/programmable electronic safety-related systems |
[58] | IEC 61800-5-2, Adjustable speed electrical power drive systems - Part 5-2: Safety requirements - Functional |
[59] | IEC 62046, Safety of machinery - Application of protective equipment to detect the presence of persons |
[60] | IEC 62061, Safety of machinery - Functional safety of safety-related electrical, electronic and programmable electronic control systems |
[61] | IEC 62079, Preparation of instructions - Structuring, content and presentation |
[62] | IEC 62280, Railway applications - Communication, signalling and processing systems - safety related communication in transmission systems |
[63] | IEC TR 63074, Safety of machinery - Security aspects related to functional safety of safety-related control systems |
[64] | IEC/IEEE 82079-1, Preparation of information for use (instructions for use) of products - Part 1: Principles and general requirements |
[65] | CEN/TR 14715, Safety of machinery - Ionizing radiation emitted by machinery - Guidance for the application of technical standards in the design of machinery in order to comply with legislative requirements |
[66] | Research project No. FP-0317: Collaborative robots - Investigation of pain sensibility at the Man-Machine-Interface. Institute for Occupational, Social and Environmental Medicine at the Johannes Gutenberg University of Mainz, Germany. Final report December 2014 |
УДК 621.865.8:007.52:006.86:006.354 | ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, требования безопасности, промышленные роботы, функции безопасности, оценка риска, защитные меры | |
{kind=link}