ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТР
60.4.3.1—
2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ПРОМЫШЛЕННЫЕ ТРАНСПОРТНЫЕ РОБОТЫ
Метод навигационных испытаний в заданной области
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) совместно с Федеральным государственным бюджетным учреждением «Российский институт стандартизации» (ФГБУ «Институт стандартизации») на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 26 сентября 2023 г. № 960-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту АСТМ F3244-21 «Стандартный метод испытаний по навигации. Заданная область» (ASTM F3244-21 «Standard test method for navigation: Defined area», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 Краткое описание метода испытаний
5 Требования к проведению испытаний
6 Требования к оборудованию
7 Ухудшения условий проведения испытаний
8 Требования безопасности
9 Определение характеристик и показателей
10 Порядок проведения испытаний
11 Требования к отчетности
12 Погрешность и систематическая ошибка
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации — промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Виды и методы испытаний» и распространяется на промышленные транспортные роботы (ПТР). Настоящий стандарт определяет метод навигационных испытаний ПТР в заданной области.
ПТР должны обладать определенным набором навигационных качеств, соответствующих их применению по назначению. Примерами таких качеств являются перемещение между конструкциями, определяющими маршрут робота, и обход препятствий. Навигационная система контролирует и управляет функциями ПТР, обеспечивая своевременную корректировку перемещения ПТР из одного места в другое. Внешняя среда часто содержит разные ограничения проходимости ПТР, такие как ограждения и препятствия. Настоящий стандарт определяет оборудование, препятствия, процедуры, задания и метрики введенных ограничений, которые тем самым определяют метод испытаний для оценки навигационных качеств ПТР.
Представленный метод испытаний является масштабируемым для обеспечения диапазона размеров объектов, ограничивающих проходимость ПТР при выполнении задания.
ПТР может осуществлять запрограммированное и/или автономное перемещение из исходной позиции к конечной цели. Кроме того, требования к перемещению ПТР могут включать поддержание заданной скорости, реконфигурирование ПТР для прохождения через заданные области с заданной нагрузкой, перемещение ПТР в ограниченных пространствах, обход препятствий и другие требования или их комбинации. Представленный метод испытаний обеспечивает оценку ПТР на соответствие совокупности требований пользователя.
Настоящий стандарт является модифицированным по отношению к стандарту АСТМ F3244-21, разработанному техническим комитетом F45ASTM International «Робототехника, автоматика и автономные системы» в соответствии с принципами стандартизации, установленными в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
В настоящий стандарт внесены следующие технические отклонения по отношению к стандарту АСТМ F3244-21:
- исключены примечания и сноски примененного стандарта, которые нецелесообразно применять в национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны исключительно в Международной системе единиц (СИ), используемой в национальной стандартизации в соответствии с требованиями ГОСТ 8.417—2002, в то время как в примененном стандарте значения измерений приведены как в системе единиц СИ, так и в американских единицах (дюйм-фунт), в связи с чем пункт 1.2 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт;
- раздел 1 «Область применения» приведен в соответствие с требованиями ГОСТ 1.5—2001: пункт 1.1 переформулирован с включением в него информации из пунктов 1.1.1, 1.1.6 и 1.1.7 примененного стандарта; пункты 1.1.2, 1.1.3, 1.1.4, 1.1.5 примененного стандарта перенесены во введение как не относящиеся к области применения стандарта; в пункт 1.2 включена информация из IV
пунктов 1.1.6 и 1.1.7 примененного стандарта; нумерация пункта 1.1.8 примененного стандарта изменена на 1.3; пункт 1.1.9, содержащий информацию о планах работы технического комитета F45, не включен в настоящий стандарт; нумерация пункта 1.3 примененного стандарта изменена на 1.4;
- в раздел 2 «Нормативные ссылки» не включены АСТМ F3200, АСТМ F3218, АСТМ F3243, АСТМ F3327, АСТМ F3381, АСТМ F3499, ИСО 3691-4:2020, не имеющие аналогов среди межгосударственных и национальных стандартов, и ANSI/ITSDF В56.5, относящийся к системе стандартизации США, которые нецелесообразно применять в национальной стандартизации; соответственно из текста стандарта исключены ссылки на эти документы, имеющие справочный характер, что не влияет на техническое содержание данных пунктов; добавлена ссылка на ГОСТ Р 60.0.0.4;
- в соответствии с ГОСТ Р 1.7—2014 и ГОСТ Р 1.5—2012 включен раздел 3 «Термины и определения» вместо использованного в примененном стандарте раздела 3 «Терминология», состоящего из подразделов 3.1 «Определения» и 3.2 «Определения терминов, установленные в настоящем стандарте»;
- терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5—2001;
- расположение рисунков и их нумерация изменены и приведены в соответствие с упоминанием их в тексте стандарта, рисунки 2—8 перенесены из раздела 3 в раздел 4, соответственно ссылки на них удалены из примечания к 3.1;
- на рисунке 11 исправлена ошибка, допущенная в примененном стандарте, — неправильно указанный размер препятствия;
- на рисунке 18 не приведены наименование и символы национальных институтов США;
- ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5—2001 вместо раздела 13 «Ключевые слова» в примененном стандарте.
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ПРОМЫШЛЕННЫЕ ТРАНСПОРТНЫЕ РОБОТЫ
Метод навигационных испытаний в заданной области
Robots and robotic devices. Mobile robots. Test method for navigation in defined area
Дата введения — 2024—01—01
1 Область применения
1.1 Настоящий стандарт распространяется на автоматические, автоматизированные или автономные промышленные транспортные роботы (ПТР), перемещающиеся в ограниченных пространствах производственных помещений.
Настоящий стандарт устанавливает требования к проведению навигационных испытаний ПТР в заданной области методом оценки способности ПТР перемещаться в заданной области с ограниченными проходами в соответствии с командами оператора или с использованием данных, предоставленных оператором (например, о расположении промежуточных целей или карты внешней среды), а также на основании информации от своих датчиков (например, датчиков определения расположения препятствий во внешней среде). При этом ПТР может перевозить установленный на нем груз, являющийся частью конфигурации ПТР, которая считается неизменной во время испытания. Данный метод испытаний предназначен для использования изготовителями, специалистами по вводу в эксплуатацию и пользователями ПТР. В данном методе испытаний определены несколько типовых конфигураций двумерных областей, соответствующих конкретным прикладным задачам для разных типов ПТР.
1.2 Настоящий стандарт не распространяется:
- на перемещение группы ПТР в ограниченном пространстве со взаимодействием или без взаимодействия между собой;
- действия ПТР по загрузке или разгрузке грузов (например, подъем и/или опускание палет, подсоединение и/или отсоединение буксируемого прицепа).
1.3 Данный метод испытаний необходимо применять в местах, где возможно обеспечить размещение установленного в настоящем стандарте оборудования и воспроизвести необходимые условия внешней среды, включая установленные ухудшения заданных условий.
1.4 Требования настоящего стандарта не охватывают весь спектр проблем безопасности, связанных с его применением, при их наличии. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до использования настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ГОСТ Р 60.0.0.4/ИСО 8373:2021 Роботы и робототехнические устройства. Термины и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указате-
Издание официальное лю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 60.0.0.4, а также следующие термины с соответствующими определениями:
3.1 задание (task): Последовательность движений и измерений, соответствующая одной попытке выполнения испытания.
Примечание — В данном методе испытания одно задание определено как перемещение ПТР из заданной исходной позиции в целевую позицию в заданном направлении (вперед или назад). Если возможно, то ПТР должен вернуться на исходную позицию, используя автономное управление без вмешательства оператора.
3.2 исходная позиция (start): Место, с которого ПТР начинает испытание, определяемое линией, перпендикулярной направлению движения ПТР.
3.3 целевая позиция (end goal): Местоположение, при достижении которого задание будет выполнено и которое задается линией, перпендикулярной направлению движения робота.
3.4 намеченное поведение (intended behavior): Состояние или действие ПТР, заданное заказчиком испытания, которое определяет критерий успеха при завершении попытки выполнения задания.
3.5 площадь препятствия в основании (obstacle footprint): Прямоугольная область, занимаемая препятствием во время испытания, с размерами проекции контура препятствия на горизонтальную плоскость, определяемыми ее крайними гранями, которая используется для описания позиции и ориентации препятствия во внешней среде относительно границ заданной области.
Примечание — Примеры опорных поверхностей для разных типов препятствий показаны на рисунке 1.
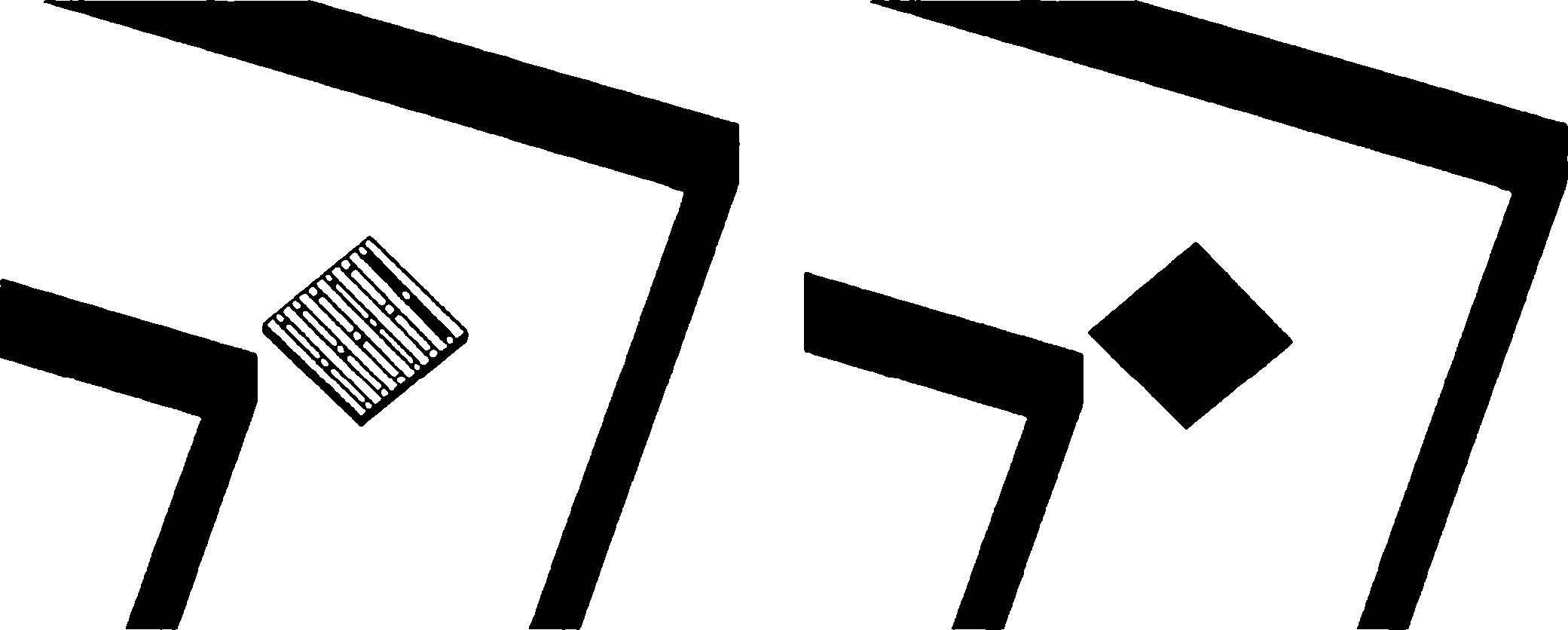
а) Поддон
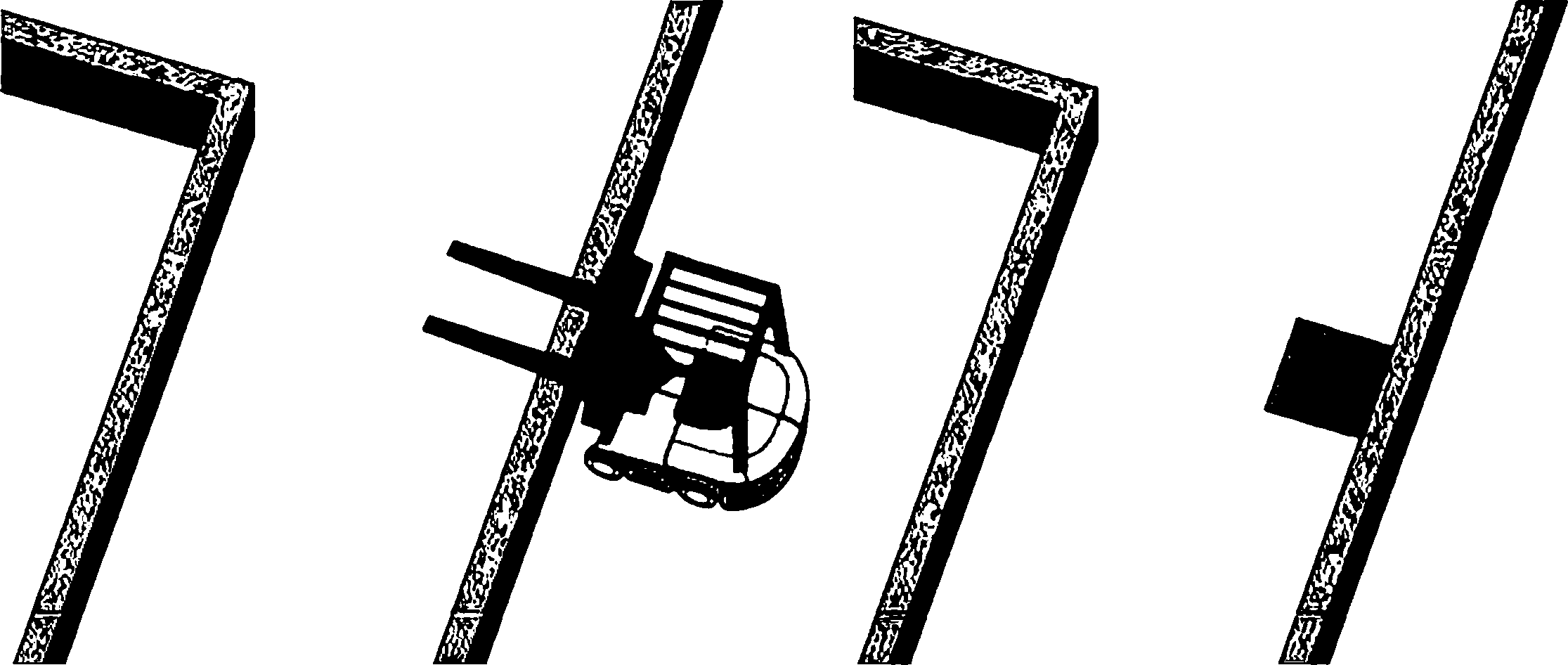
b) Вилы
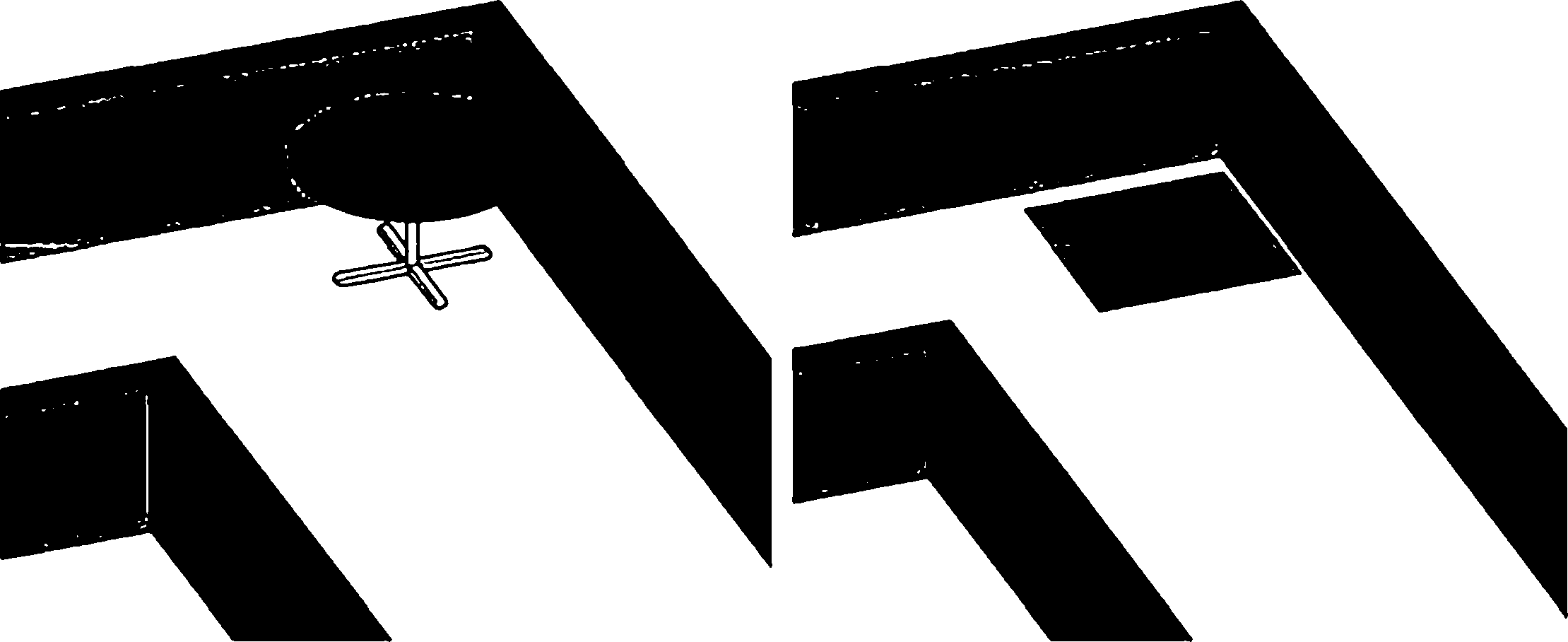
с) Стол
Рисунок 1 — Примеры препятствий (слева) и соответствующих им опорных поверхностей (справа), расположенных в заданной области
3.6 препятствие (obstacle): Неподвижный или подвижный объект, который препятствует намеченному движению.
3.7 промежуточная цель (goal): Местоположение, через которое робот должен проехать при выполнении задания.
Примечание — Промежуточных целей может быть несколько.
3.8 ухудшение условий [impairment(s)]: Объект, обстоятельство или особенность ситуации, вызывающие нарушение использования ПТР по назначению, например появление препятствий или сбои связи во время выполнения задания.
Примечание — Для данного метода испытаний под использованием ПТР по назначению понимается перемещение ПТР из исходной позиции до конечной цели.
4 Краткое описание метода испытаний
4.1 Определение заданной областиДанный метод испытаний состоит из нескольких повторений выполнения задания по перемещению в области, заданной физическими барьерами, виртуальными барьерами, напольной разметкой или комбинациями вышеперечисленного. Более подробные сведения приведены в разделе 6. На рисунках 2—8 показаны возможные ограничения для навигации ПТР в заданной области с указанием расположения отдельных позиций (А, В и С), а также линий старта и финиша. С использованием данных схем метод испытаний может быть применен для определения способности ПТР перемещаться в области с заданными размерами. Данный метод испытаний также применяют для определения минимального пространства, в котором данный ПТР может перемещаться.
Длина ПТР
/Уа

Линия финиша
Линия старта
Длина ПТР
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
Рисунок 2 — Схема метода навигационного испытания при движении по прямому проходу
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
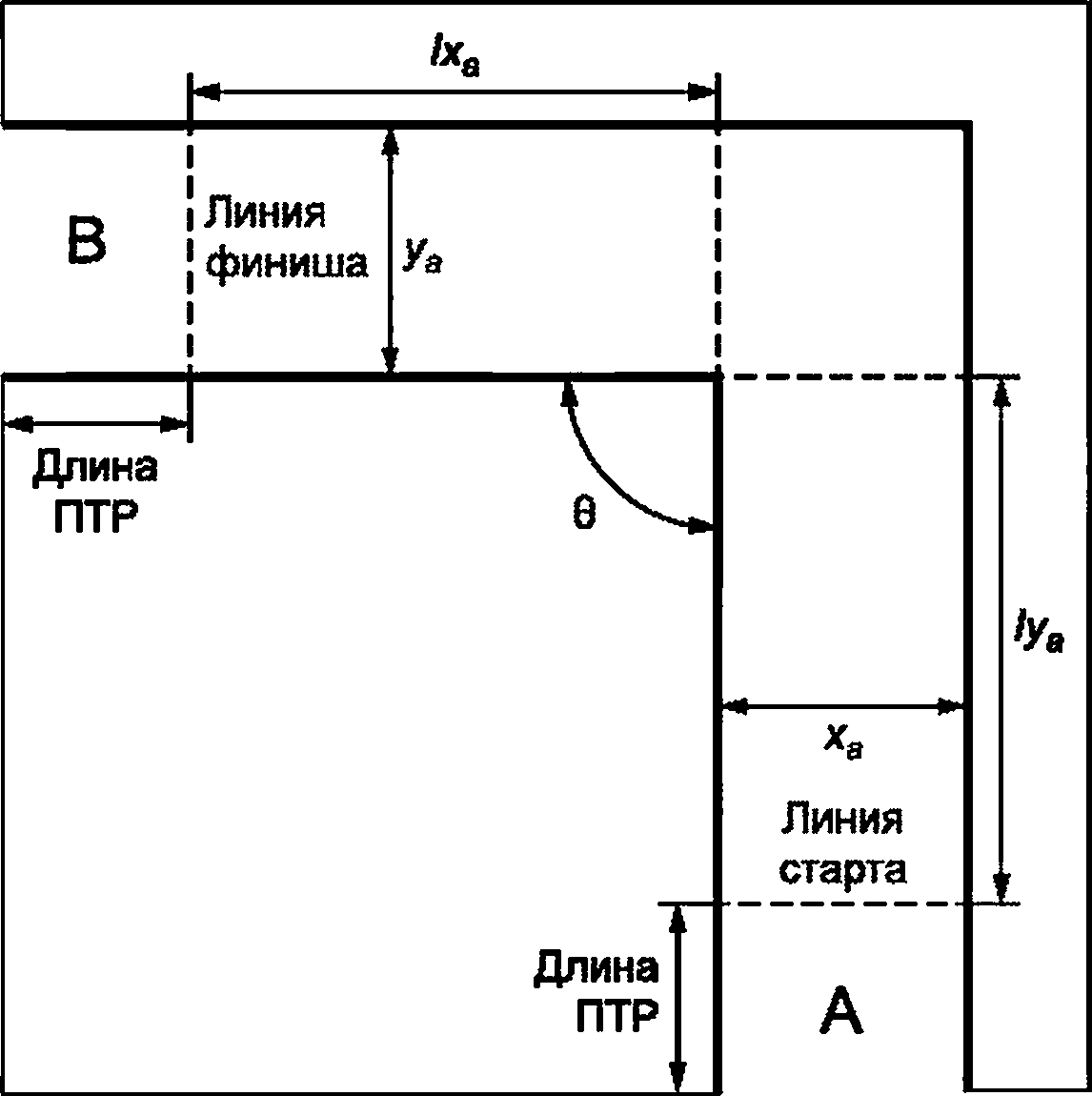
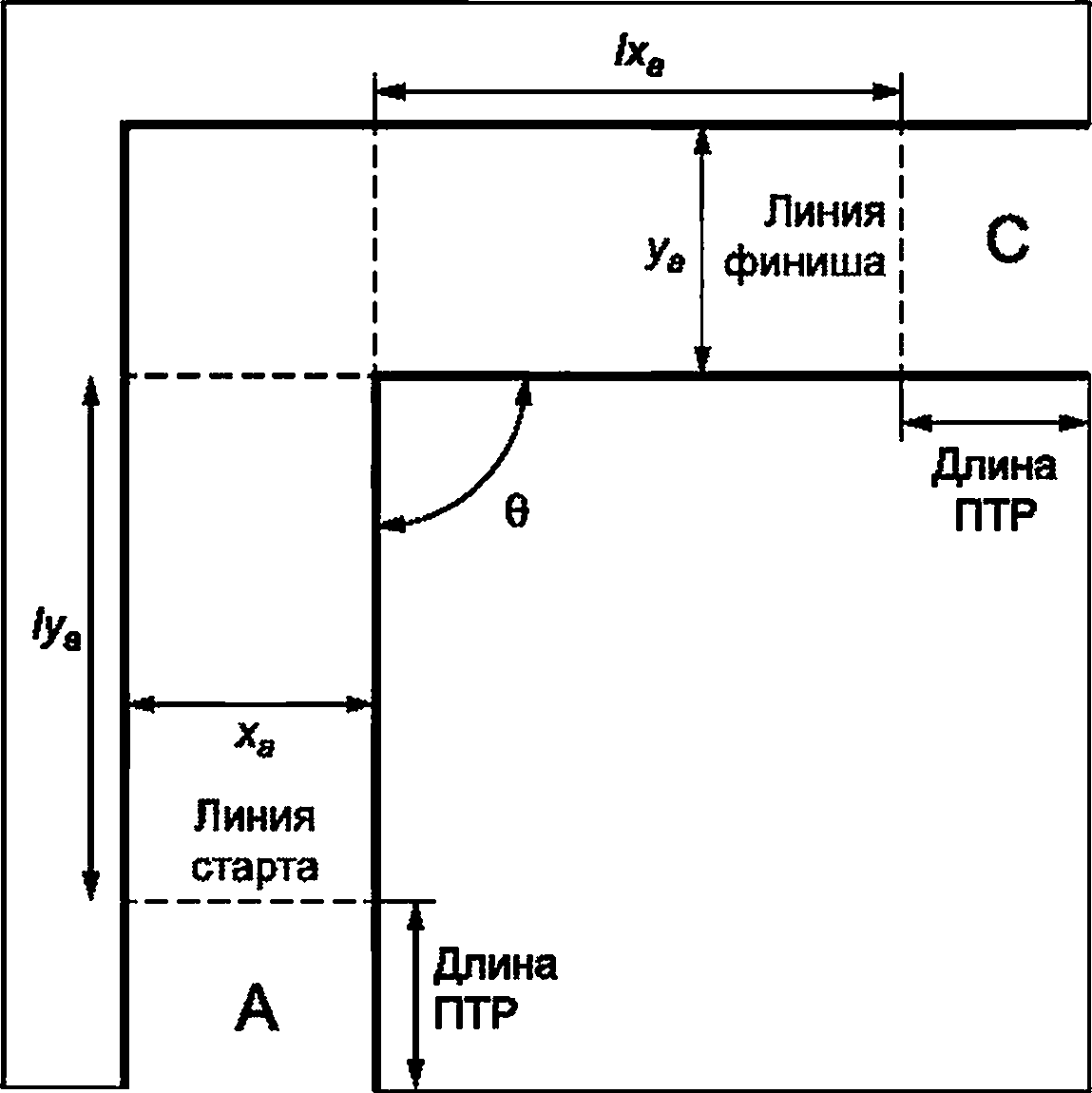
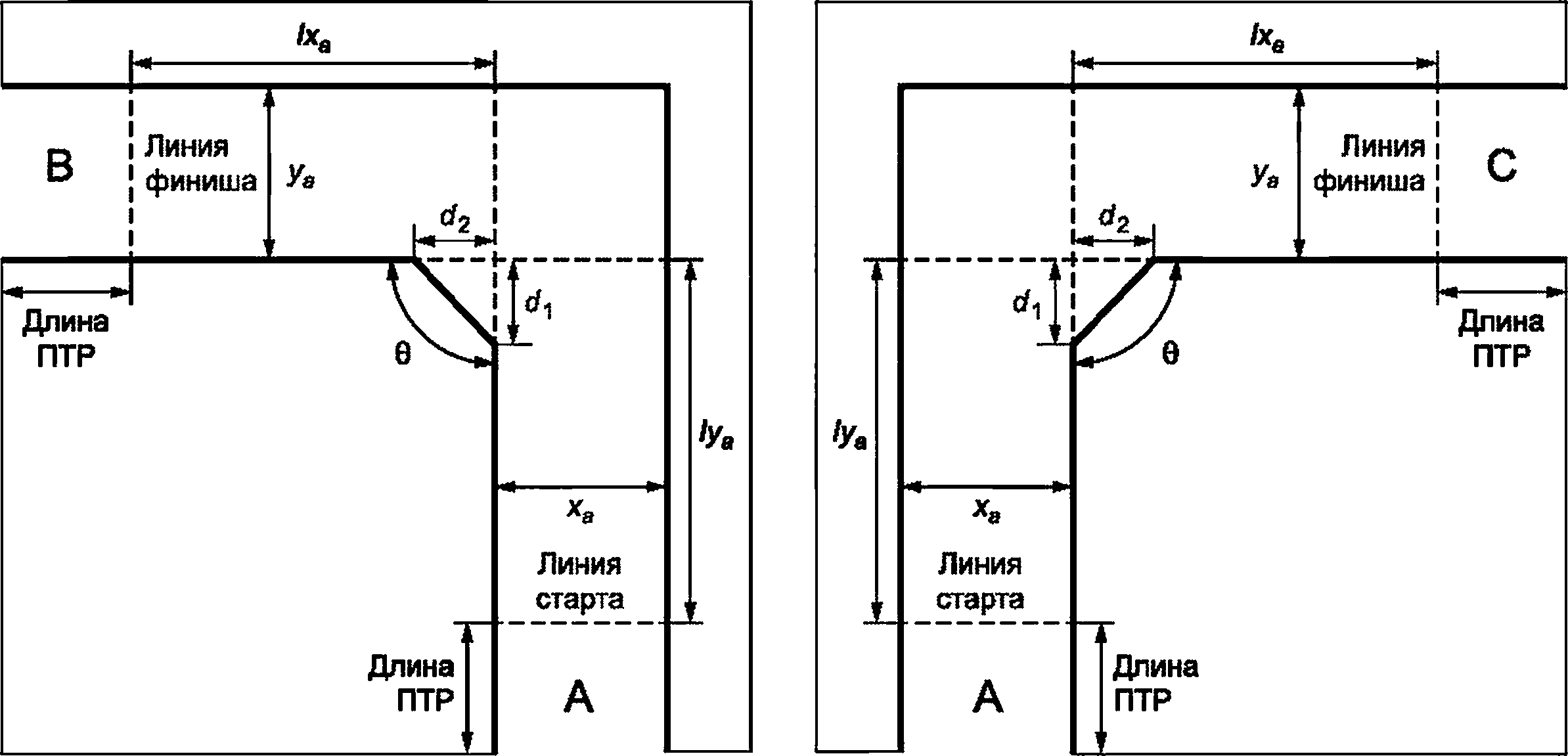
Рисунок 3 — Схема метода навигационного испытания при движении по проходу с одним поворотом без скосов с двумя возможными направлениями поворота ПТР
.Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
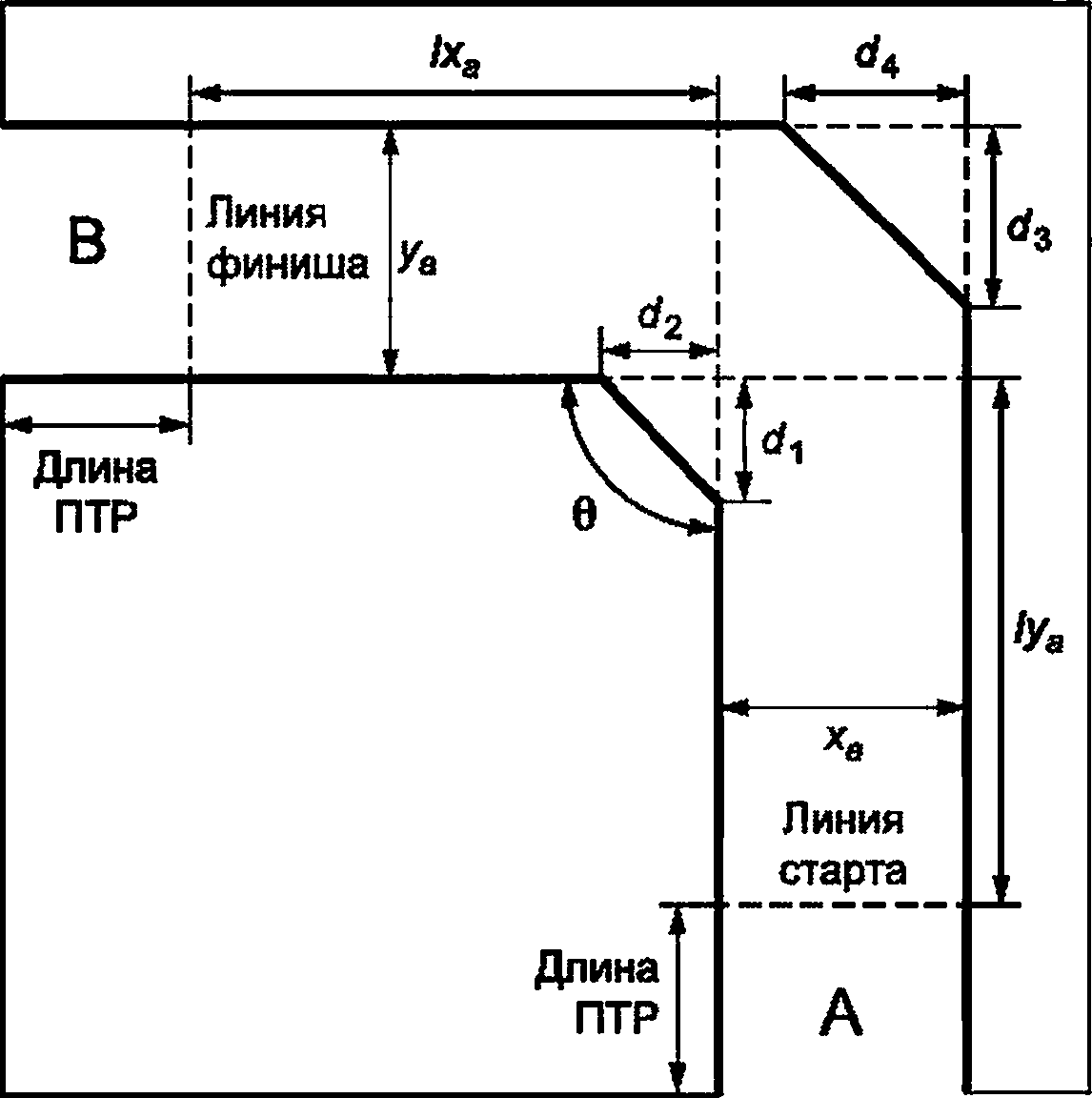
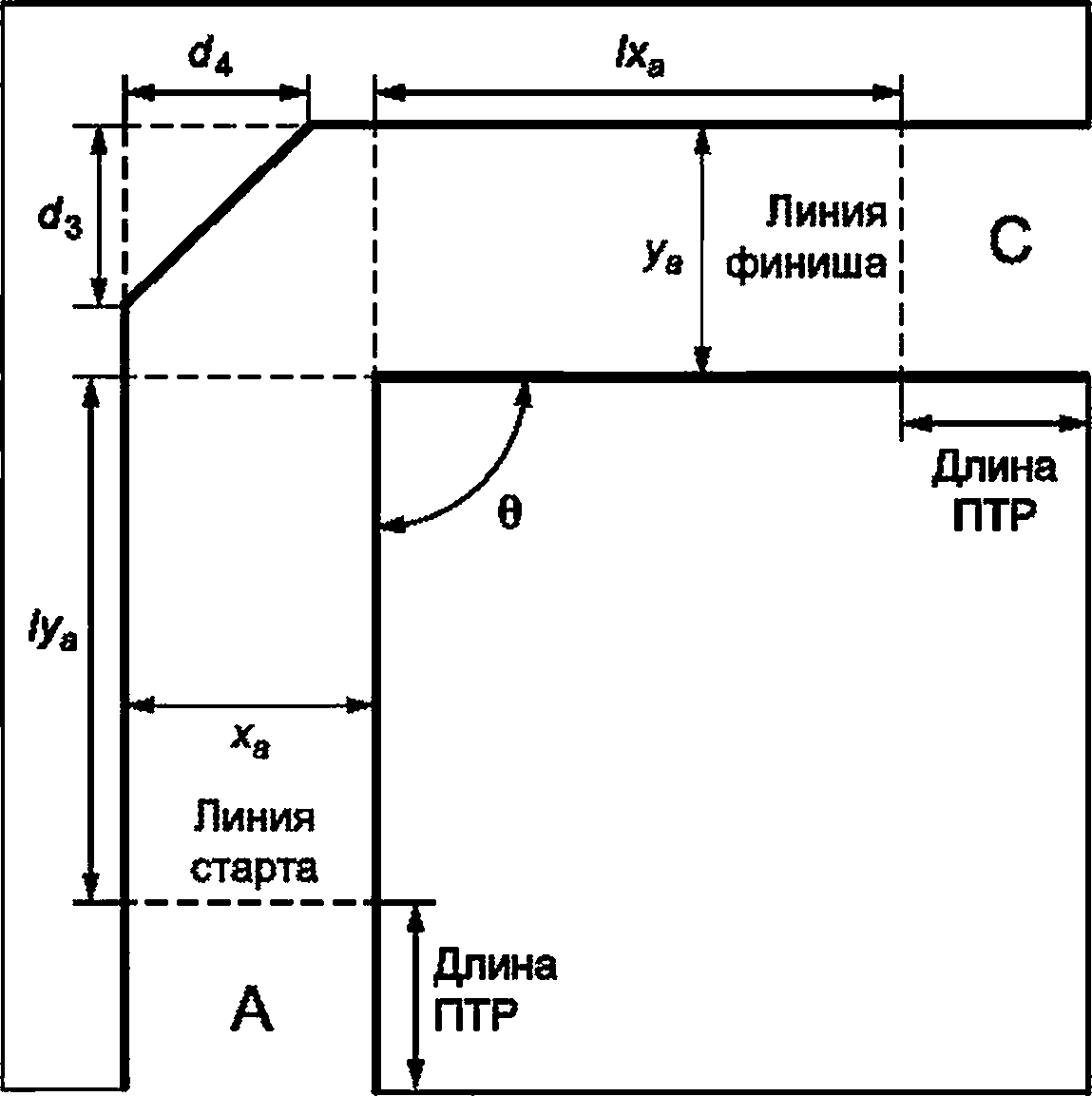
Рисунок 4 — Схема метода навигационного испытания при движении по проходу с одним поворотом с внутренним скосом с размерами и d2 и с внешним скосом с размерами сУ3 и с/4 с двумя возможными направлениями поворота ПТР
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка
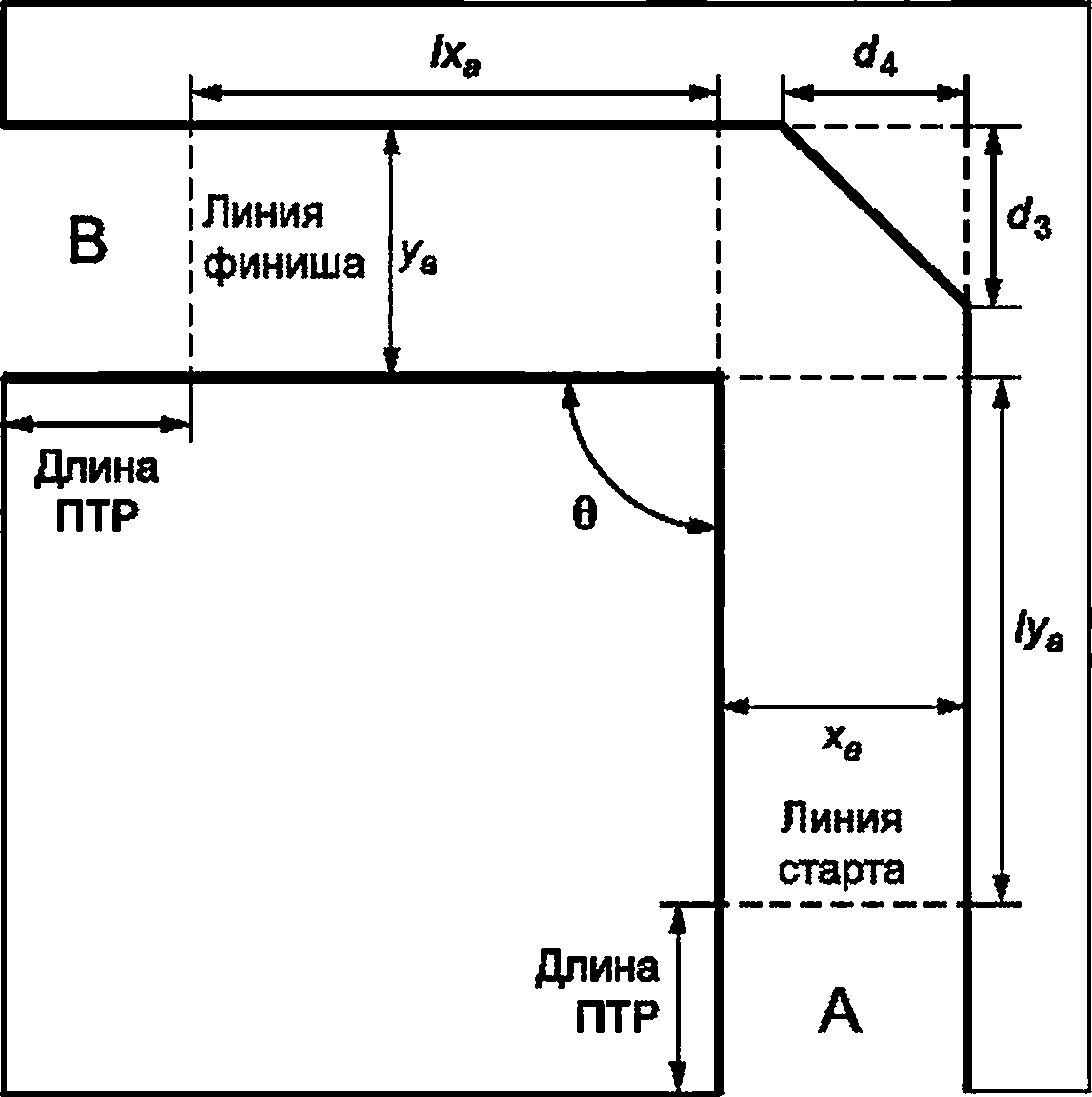
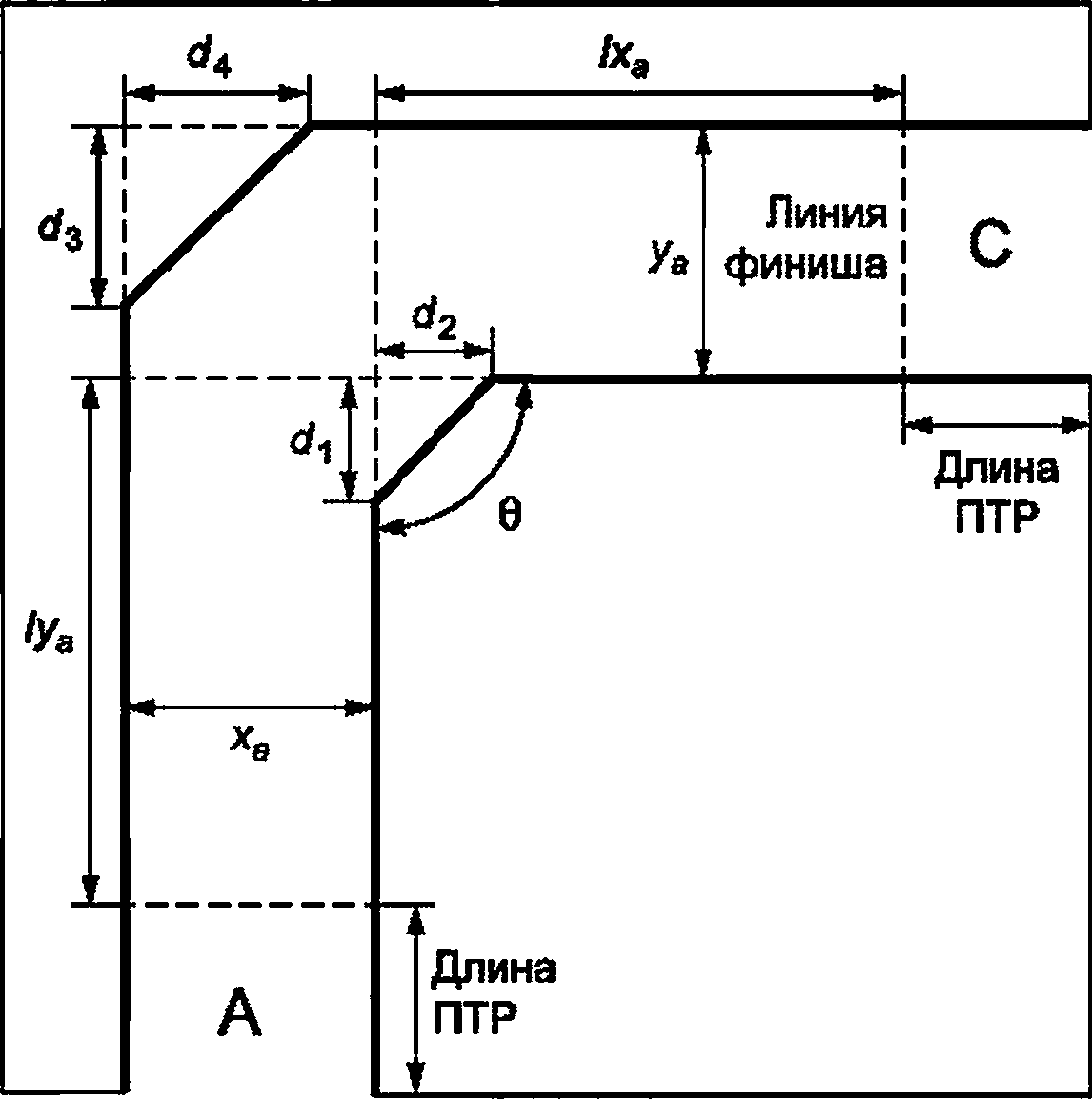
Рисунок 5 — Схема метода навигационного испытания при движении по проходу с одним поворотом и только внутренним скосом с размерами сУ1 и d2 с двумя возможными направлениями поворота ПТР
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
Рисунок 6 — Схема метода навигационного испытания при движении по проходу с одним поворотом и только внешним скосом с размерами d3 и сУ4 с двумя возможными направлениями поворота ПТР
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
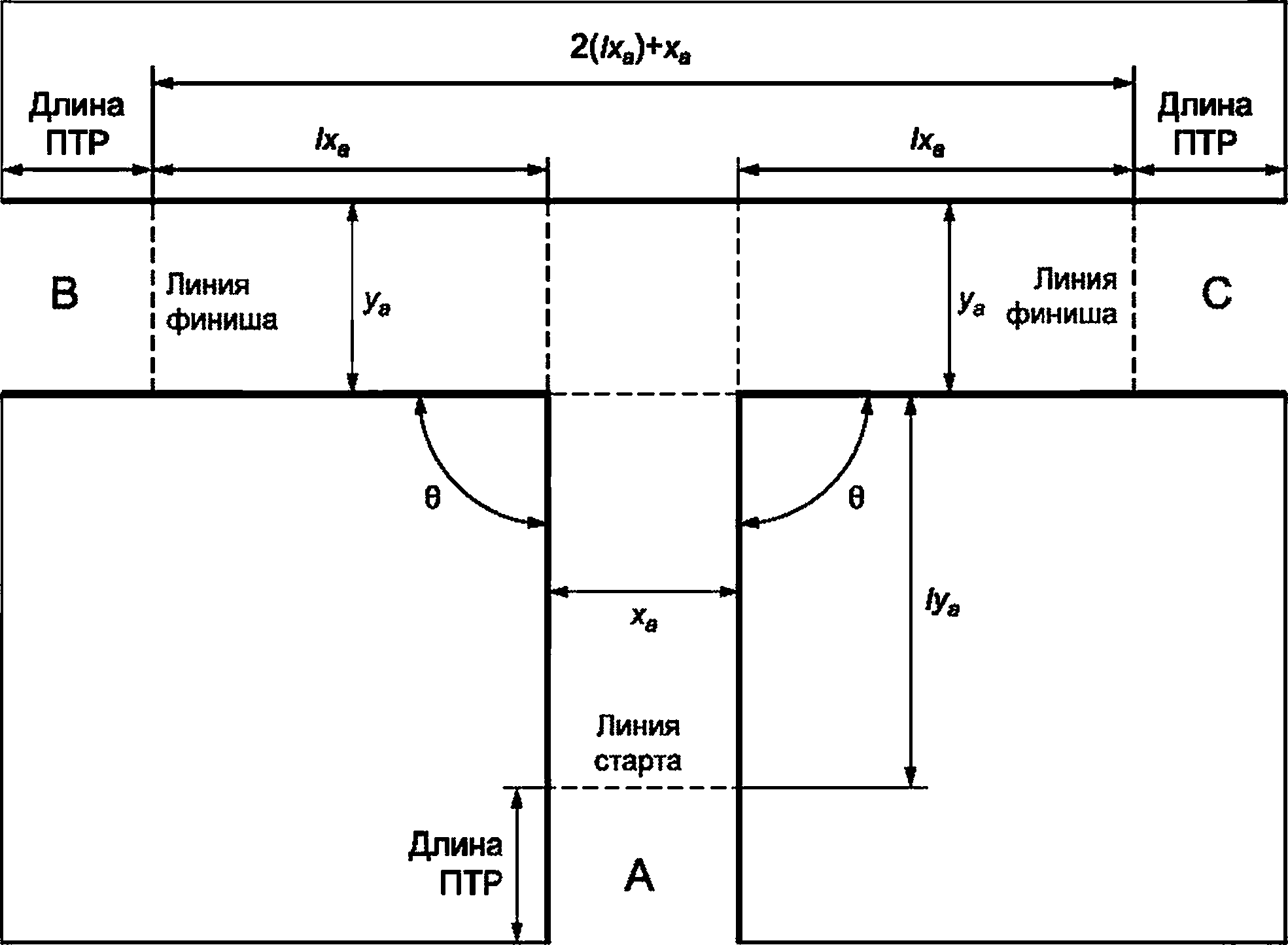
Рисунок 7 — Схема метода навигационного испытания при движении по проходу с Т-образным перекрестком без скосов
Примечание — Утолщенные линии соответствуют физическим ограждениям или линиям, вдоль которых расположены виртуальные ограждения или напольная разметка.
Рисунок 8 — Схема метода навигационного испытания при движении по проходу с Т-образным перекрестком и внутренними скосами с размерами и d2
4.2 Метод навигационных испытаний
4.2.1 ПТР должен перемещаться в заданной области среди установленного оборудования (примеры показаны на рисунках 9 и 10). Размещение оборудования определено физическими границами, виртуальными границами или напольной разметкой в области, по которой будет перемещаться ПТР. Линии старта и финиша наносят для обозначения исходной позиции (А) и целевых позиций (В или С). Одна попытка выполнения задания считается успешной, когда ПТР переместится из исходной позиции в целевую, указанную заказчиком испытаний, выполнив при этом заданные условия, которыми обычно являются пересечение линии финиша и достижение целевой позиции без столкновения с элементами внешней среды. Если испытание предполагает наличие препятствий в заданной области или ухудшение связи, то в качестве реакции ПТР может быть задана остановка и прекращение выполнения задания сразу после обнаружения препятствия или ухудшения связи. ПТР не должен сталкиваться с ограждениями или препятствиями (за исключением контактных частей навигационных датчиков) и выезжать за пределы заданной области. Если ПТР сталкивается с каким-либо ограждением или пересекает виртуальное ограждение при выполнении попытки, то данная попытка считается неудачной. Заказчик испытаний имеет право выбрать размеры заданной области (ха и/или уа на рисунках 2—8) для проведения испытаний, а также значения других переменных, относящихся к ограждениям (например, высоту, скосы) и ухудшению условий (например, размеры и размещение препятствий в заданной области). Ширина заданной области может быть изменена заказчиком испытаний до их начала с целью определения минимального пространства, в котором перемещается ПТР.
Рисунок 9 — Пример оборудования Т-образного перекрестка с физическими ограждениями
а) Физические ограждения
Ь) Виртуальные ограждения
Напольная разметка
Линия излучения лазера, связанная с ПТР
с) Напольная разметка
Рисунок 10 — Пример навигации ПТР
4.2.2 Навигационные возможности ПТР определяют по его способности неоднократно перемещаться в заданной области по команде двигаться из исходной позиции к целевой. В данном испытании не требуется перемещение ПТР по конкретному маршруту. Целью данного испытания не является ни определение маршрута перемещения ПТР, ни оценка повторяемости перемещения ПТР по маршруту. Данное испытание предназначено для определения способности ПТР перемещаться в заданной области, а изменение заданной ширины прохода позволяет определить конкретные размеры области, в которой ПТР способен перемещаться без столкновений. Кроме того, в данном испытании не оценивают точность и повторяемость прибытия ПТР в целевую позицию после прохождения линии финиша.
4.2.3 Руководителю испытаний необходимо проинформировать заказчика испытаний о числе попыток выполнения задания, которые должны быть сделаны, в соответствии с заданными уровнями статистической надежности и достоверности (см. 9.6).
4.2.4 Руководитель испытаний отвечает за расстановку оборудования и приборов, обеспечение порядка проведения испытаний и информирование заказчика испытаний о результатах.
4.2.5 Руководитель испытаний отвечает за работу техника-испытателя и оператора ПТР.
4.3 Исходные параметры
Исходные параметры частично показаны на рисунках 2—8. Все размеры, указанные на данных рисунках, относятся к двумерному пространству с ровным горизонтальным полом. Расстояния между ограждениями следует измерять перпендикулярно ограждениям.
4.3.1 Ширина прямого прохода (см. рисунок 2)
Значение ха представляет расстояние между ограждениями, определяющими область перемещения ПТР по прямому проходу.
4.3.2 Ширина пересекающихся проходов (угловое и Т-образное пересечение, см. рисунки 3—8)
Указанное в 4.3.1 справедливо и для данного случая. Однако в данном случае имеются две ширины, значения которых следует задать: ширина первоначального прохода ха и ширина прохода после поворота уа. Комбинация этих значений описывает размеры двумерного пространства для перемещения ПТР, представляющего пересечение двух проходов под углом 0°. Значением по умолчанию является угол 90° для перпендикулярного пересечения, но заказчик испытания может выбрать другие значения углов, отличающиеся от 90°.
4.3.3 Скошенные углы
Данная возможность позволяет заказчику испытаний уточнить форму углов в заданной области. Скосы определяют заданием расстояний обреза и с/2 для внутреннего скоса (см. рисунок 5) и d3 и сУ4 для внешнего скоса (см. рисунок 6). Расстоянием обреза является расстояние между виртуальным углом и началом скоса, определяющего внутреннее пространство. Внутренний скос увеличивает ширину области пересечения проходов по сравнению с угловым пересечением (см. рисунок 5) и Т-образным пересечением (см. рисунок 8). Внешний скос уменьшает ширину области пересечения проходов по сравнению с угловым пересечением (см. рисунок 6). В угловом пересечении допускается одновременно использовать внутренний и внешний скосы (см. рисунок 4).
4.3.4 Размещение препятствий
Препятствия (о1, о2 и т. д.) могут быть размещены в заданной области для усложнения условий навигации ПТР. Положение и ориентацию препятствий (|хо1|, |уо1|, 0о1, |хо2|, |уо2|, 0о2 и т. д.) фиксируют относительно начала координат препятствия (ро1, ро2 и т. д.) и ограждения заданной области (см. рисунок 10). Не существует ограничения на число размещаемых препятствий. Препятствия допускается располагать так, чтобы ПТР не мог добраться до конечной цели, что потребует соответствующей корректировки намеченного поведения (см. 4.3.8).
4.3.4.1 Динамические/подвижные объекты
Предполагается, что в последующих изданиях настоящего стандарта будут предусмотрены средства для использования подвижных объектов в качестве препятствий, например задание начальной и конечной точек, а также траектории перемещения препятствия в заданной области.
4.3.5 Время выполнения
Временем начала выполнения задания считается момент, когда весь корпус ПТР пересечет линию старта, покидая исходную позицию (А). Временем окончания выполнения задания считается момент, когда весь корпус ПТР пересечет линию финиша, достигая целевой позиции (В или С) (см. рисунки 2—8). Время выполнения задания фиксируют с точностью до 1 с в каждой попытке, а время выполнения всего испытания регистрируют как среднее значение времени выполнения всех попыток.
4.3.6 Длина маршрута
Длину маршрута определяют для расчета средней скорости перемещения. За нее принимают расстояние по центру заданной области между линиями старта и финиша, а не реальный маршрут, пройденный ПТР. Отклонения от прямолинейного маршрута не учитывают.
4.3.6.1 Для прямого прохода длиной маршрута является 1уа (см. рисунок 2).
4.3.6.2 Для проходов, пересекающихся под прямым углом, за длину маршрута принимают значение (/уа - Уа/2) + (/ха - ха/2) (см. рисунки 3—8). Для проходов, пересекающихся не под прямым углом, длину маршрута рассчитывают аналогично, используя центральную линию заданной области.
4.3.6.3 Для больших и более сложных областей длину маршрута измеряют, регистрируя приблизительный маршрут, пройденный ПТР, рассчитанный с использованием центральной линии, охватывающей заданную область.
4.3.7 Скорость перемещения
Скорость, измеряемую в м/с, определяют делением длины маршрута на время выполнения одной попытки. Среднюю скорость перемещения вычисляют делением длины маршрута на среднее время выполнения задания, где среднее время рассчитывают делением общей длительности выполнения п попыток на п.
4.3.8 Намеченное поведение
Заказчик испытаний может задать критерий успешности для каждого испытания, например прохождение линии финиша для достижения целевой позиции без соударений с ограждениями или остановка там, где были обнаружены обстоятельства, препятствующие достижению целевой позиции. Следует определить два параметра намеченного поведения:
4.3.8.1 Эффективность достижения цели — критерий успеха, определяющий необходимость достижения ПТР целевой позиции, обозначающей завершение попытки. Заказчик испытаний может отменить требование движения ПТР к целевой позиции, если произошло ухудшение условий, например потеря связи.
4.3.8.2 Максимальное время выполнения задания — максимально допустимое время выполнения задания для успешной попытки. Данный показатель является дополнительным критерием успеха, который заказчик испытаний задает как часть намеченного поведения ПТР, и не является обязательным.
4.3.8.3 Дополнительные технические требования — заказчик испытаний может установить дополнительные технические требования к выполнению задания, требующие регистрируемых реакций со стороны ПТР, например:
1) ПТР выполняет навигационное задание, поддерживая заданный темп, например, без пауз, не на медленной скорости или без запаздывания;
2) ПТР выполняет навигационное задание с допустимой задержкой, например ПТР останавливается на пути к конечной цели на заданное время (например на 2 с) при отсутствии препятствий, вызывающих остановку;
3) ПТР выполняет навигационное задание без вмешательства человека, например продолжает выполнение задания по своему собственному решению;
4) ПТР выполняет навигационное задание с допустимым вмешательством человека, например ПТР получает помощь от техника-испытателя или другого сотрудника для продолжения движения после остановки.
4.3.9 Вид/направление движения ПТР в проходе
При движении в прямых проходах ПТР может получить команду использовать конкретный вид движения прямым или задним ходом. Вид и направление движения ПТР регистрируют на каждом испытании.
4.3.10 Направление поворота ПТР
При повороте в пересекающихся проходах (см. рисунки 3—8) ПТР может получить команду перемещаться от линии старта (А) к любой из двух линий финиша (В или С), что приводит к двум разным маршрутам. Заказчик испытаний может протестировать оба маршрута с двумя возможными ориентациями ПТР, чтобы определить симметричность работы ПТР, для чего, вероятно, потребуются два отдельных испытания.
4.3.11 Гибкость испытания
При некоторых обстоятельствах заказчик испытаний может потребовать выполнение испытания с использованием пересекающихся проходов, определенных в 4.3.2, при разных углах пересечения, отличающихся от 90°. Подобное испытание возможно, если заказчик испытания выставил свое требование до начала испытания, но при условии, что определение заданной области и выполнение задания будут соответствовать методике, установленной в 4.3.
4.3.12 Повышение сложности областей навигации
Области более сложные, чем области с угловым или Т-образным пересечением, показанные на рисунках 2—8, также допускается использовать в качестве заданных областей для оценки навигационных способностей ПТР. Размеры каждого сегмента заданной области необходимо указать на схеме, приведенной в протоколе испытаний. Пример более сложной заданной области приведен на рисунке 11. Длина всех проходов должна соответствовать требованию соблюдения минимальных размеров трассы, установленных в 6.5 (т. е. длина проходов должна быть не менее четырехкратной длины ПТР и не менее 4 м). Может быть задано несколько линий старта и финиша, если допустимо несколько маршрутов для выезда с исходной позиции или достижения конечной цели, как показано на рисунке 11.
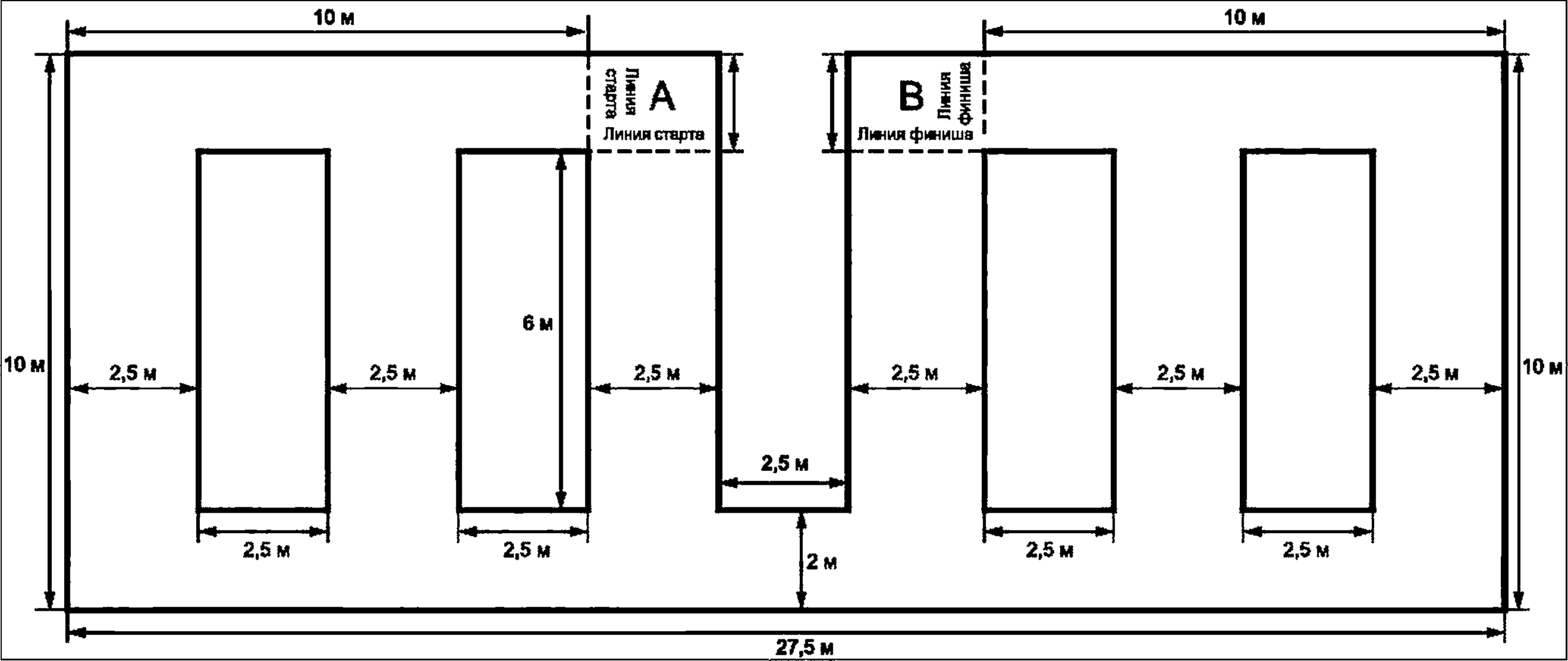
Рисунок 11 — Пример схемы навигационных испытаний с использованием большей и более сложной заданной области
4.3.13 Данные о позиционировании ПТР
Позиция ПТР в заданной области испытательного оборудования должна регистрироваться на протяжении всего испытания с использованием таких методов, как видеосъемка, захват движения, использование информации о местоположении, поступающей от самого ПТР, или их комбинаций. Метод регистрации указывают в протоколе испытаний.
5 Требования к проведению испытаний
5.1 ПТР работают в широком диапазоне применений, включая производственные помещения и склады. Области применения ПТР могут охватывать заданные и незаданные области, которые бывают структурированными или неструктурированными. Необходимо, чтобы результаты испытаний ПТР представляли в статистически значимой форме способность ПТР выполнять навигационные задания в заданной области при наличии или отсутствии ухудшения условий. Независимо от того, способен ли ПТР отклоняться от заданного маршрута и/или использовать особенности локальной внешней среды в качестве входных данных для решения навигационных задач, не следует использовать другой метод испытаний. Наоборот, способность ПТР адаптировать свой способ навигации к конкретной внешней среде будет объективно определяться эффективностью его работы при данном методе испытаний.
5.2 В данном методе испытаний предусмотрено использование трех разных способов реализации испытательного оборудования: физические ограждения, виртуальные ограждения и напольная разметка (данное оборудование определено в разделе 6). Определены два вида ухудшения условий, которые могут быть использованы в заданной области при проведении навигационных испытаний: препятствия и ухудшение связи (более подробные сведения приведены в разделе 7). Испытательное оборудование и выбранное ухудшение условий проведения испытаний должны, по возможности, соответствовать условиям среды применения ПТР.
5.3 Данный метод испытаний предназначен для оценки рабочих характеристик ПТР, заявленных изготовителем и представляющих интерес для потенциальных пользователей. Данные о рабочих характеристиках, полученные в результате испытаний, отражают возможности применения ПТР в условиях, воспроизведенных в данных испытаниях.
5.4 Испытательное оборудование является масштабируемым для обеспечения соответствия габаритам ПТР и заданным областям с тем, чтобы соответствовать текущим и перспективным производственным и логистическим операциям.
5.5 Стандартное оборудование должно быть легко изготавливаемым для того, чтобы обеспечить возможность разработчикам и пользователям ПТР самостоятельно оценивать их рабочие характеристики, а также предоставлять им возможность осуществлять проверку приводов, датчиков и средств управления ПТР на стандартных заданиях.
5.6 Хотя данный метод испытаний был разработан для ПТР, его также допускается применять как к мобильным манипуляторам и другим типам промышленного автоматизированного мобильного оборудования, так и в других областях применения мобильных роботов.
6 Требования к оборудованию
Примечание — Ограждения для данных методов испытаний могут быть реализованы в виде физических конструкций, виртуальных линий или напольной разметки.
6.1 Физические ограждения
Все методы испытаний возможно реализовать с использованием физических ограждений. Пример показан на рисунке 9. Внешняя среда может быть построена из плоских гибких материалов, таких как тонкие деревянные панели, которые при их равномерной окраске будут надежно идентифицированы испытуемым ПТР и ограничат заданную область так, что любое пересечение границы ПТР будет зафиксировано. Высоту физических ограждений (Ы, Ь2 и т. д.) от пола до верха стены/панели регистрируют (/7Ь1, hb2 и т. д.) и отмечают на схеме (см. рисунок 12). При необходимости всем сегментам ограждений задают разную высоту.
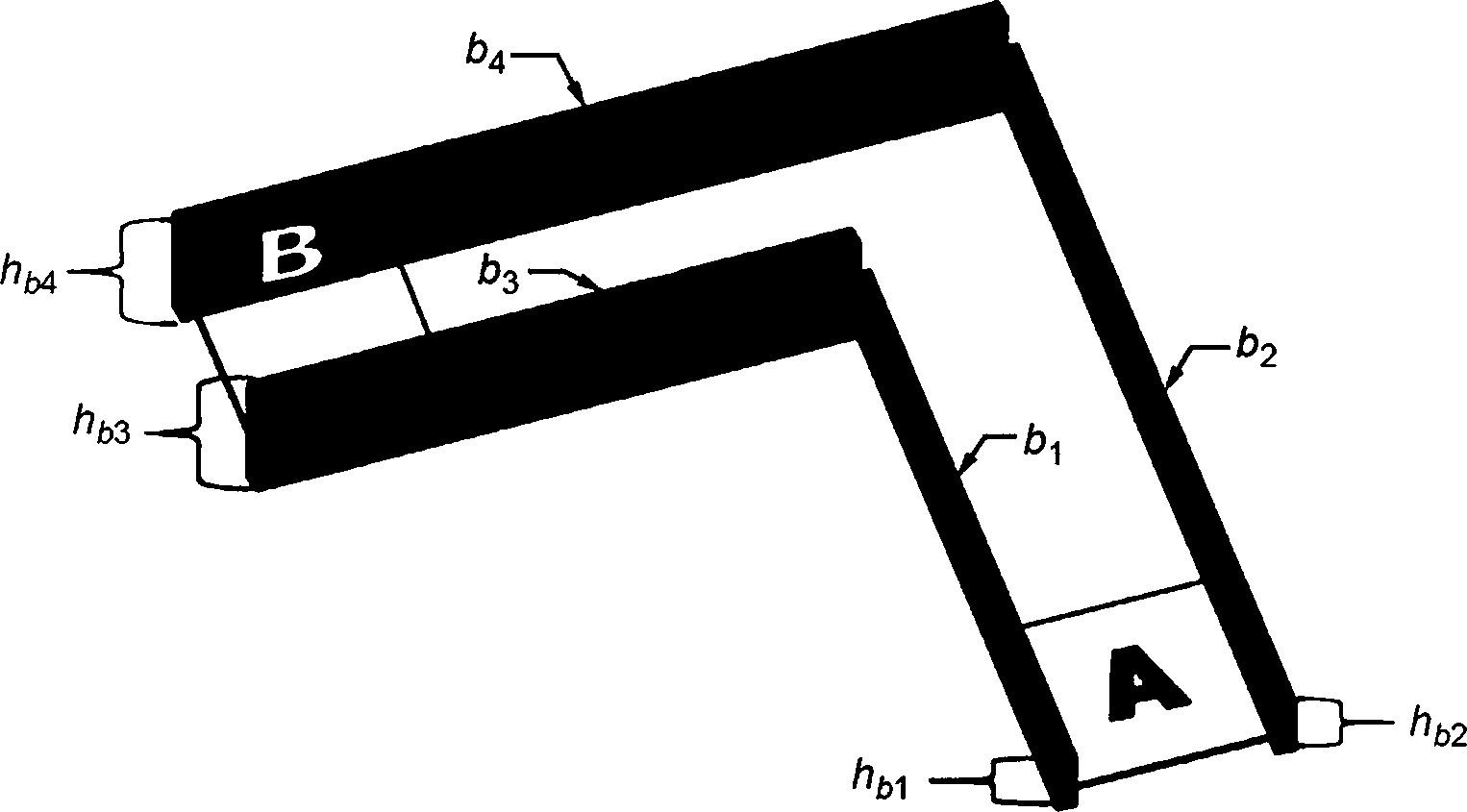
Рисунок 12 — Угловое пересечение, образованное оборудованием заданной зоны с четырьмя разными значениями высоты сегментов
6.2 Виртуальные ограждения (лазерные лучи)
Ограждения внешней среды могут быть реализованы с помощью нескольких датчиков на основе лазерных лучей, каждый из которых имеет лазерный излучатель с одной стороны и отражатель на противоположной стороне, как показано на рисунке 10 Ь). Лазеры установлены для ограждения заданной области так, чтобы ни одна часть ПТР не могла пересечь ограждение не перекрыв луч (лучи). Лазер необходимо электрически соединить со световым индикатором или с компьютером, чтобы информировать руководителя испытаний при прерывании лазерного луча. Данный лазерный луч располагают выше лазерного луча датчика безопасности ПТР, чтобы не допустить возможное взаимное влияние между двумя разными датчиками. Если на ПТР установлен лазерный датчик безопасности, то робот остановится, когда луч его датчика отразится от физического ограждения в зоне остановки. Это является ошибкой при испытании. Однако для виртуальных ограждений пересечение заданной области с зоной безопасной остановки требует дополнительного оборудования для определения зоны остановки способом, обеспечивающим обнаружение ограждения лазерным лучом. Не менее двух плоских неотражающих мишеней необходимо установить на ПТР с использованием простых планок, как показано на рисунке 13. Мишень, подвешенная на планке и определяющая внешнюю границу лазерной зоны безопасности, должна быть достаточной длины, чтобы прерывать лазерные лучи, создающие виртуальные ограждения заданной области. Другие выступающие части ПТР, например зубцы вилочного захвата, также оснащают аналогичными планками и мишенями для того, чтобы обеспечить обнаружение 14
перемещения любой части ПТР, включая датчики безопасности, за пределами заданной области, что считается неудачной попыткой. Высоту размещения лазерных лучей над полом (/Ь1, 1Ь2 и т. д.) регистрируют (/7/Ь1, hlb2 и т. д.) и указывают на схеме (см. рисунок 14). При необходимости можно задать разную высоту расположения каждого сегмента лазерных лучей.
Планка, закрепленная на ПТР
а) Виртуальные ограждения
Рисунок 13 — Расположенное на ПТР оборудование для испытаний
Лазерный указатель или Маркер
Ь) Напольная разметка
Рисунок 14 — Оборудование заданной области в виде прямого прохода с лазерными лучами, расположенными на двух разных высотах
6.3 Напольная разметка
Ограждения заданной области могут быть заданы напольной разметкой (например, лентой или окрашенными полосами), пример которых показан на рисунке 10. При использовании такой разметки на ПТР необходимо установить устройства, фиксирующие перемещение внешнего контура ПТР по полу и позволяющие обнаруживать перемещение любой части ПТР за пределами заданной области. На ПТР должны быть размещены лазерные указатели, разметочные карандаши или другие устройства нанесения на пол легко различимых меток, как показано на рисунке 13 Ь). При этом лазерные указатели устанавливают вертикально по отношению к полу, а маркирующие устройства, также установленные вертикально, должны касаться пола. Аналогично положениям 6.2, внешние края лазерной зоны безопасности ПТР определяют с помощью планок с закрепленными маркирующими карандашами или лазерными указателями. Данные маркеры, установленные на ПТР, регистрируют перемещение внешнего контура ПТР так, чтобы любая часть ПТР, включая зону безопасности, пересекающая напольную разметку, определяющую заданную область, была обнаружена, а попытка признана неудачной. При использовании лазерных указателей необходимо предусмотреть использование средств, фиксирующих перемещения ПТР, например видеокамер, которые помогают регистрировать и обрабатывать результаты испытания.
6.4 Помощь навигации ПТР
Любые физические или виртуальные дополнительные средства, необходимые для указания пути следования ПТР (например, магнитная лента или построение виртуальной карты), расположения конечной цели (например, QR-коды или виртуальные координаты) или обеспечения соответствия другим требованиям, помогающим навигации ПТР, могут быть использованы и зафиксированы в протоколе до начала проведения испытаний. Любые дополнения к заданной области необходимо отразить на схеме в протоколе испытаний.
6.5 Размеры трассы
Размеры трассы определены в 6.5.1 и 6.5.2, они не должны зависеть от использованных ограждений внешней среды (физических ограждений, виртуальных ограждений и напольной разметки).
6.5.1 Прямой проход
Длина прямого прохода 1уа должна быть по крайней мере равна четырехкратной длине ПТР, но не менее 4 м.
6.5.2 Угловое или Т-образное пересечение
Длина прохода 1уа должна быть по крайней мере равна четырехкратной длине ПТР, но не менее 4 м, а сегмент 1хя равен по крайней мере двойной длине ПТР, но не менее 2 м. Размер скоса (т. е. cd = V{с,12 + d22}) не должен превышать длину ПТР, а линия старта должна быть расположена на расстоянии не менее двойной длины ПТР от начала скоса. Аналогично целевая позиция располагается на расстоянии не менее двойной длины ПТР от конечной точки скоса.
7 Ухудшения условий проведения испытаний
7.1 При применении одного или нескольких ухудшений условий проведения навигационных испытаний в заданной области намеченное поведение ПТР, заданное заказчиком испытаний, может быть изменено и не требовать достижения целевой позиции для признания попытки успешной. Например, препятствие расположено так, что оно блокирует часть заданной области, затрудняя достижение ПТР целевой позиции. В данном случае намеченное поведение ПТР возможно изменить на остановку, прекращение действий и запрос помощи. В 4.3.8 приведена более подробная информация.
7.2 Препятствия
В заданной области допускается использовать препятствия (о1, о2 и т. д.). Характеристики каждого из препятствий заносят в протокол испытаний. В протоколе должна быть приведена схема, на которой обозначена передняя сторона и начало системы координат препятствия (см. рисунок 15), которое используется для определения позиции и ориентации препятствия среди оборудования в заданной области (см. рисунок 16). В протоколе указывают ширину (wo1, wo2 и т. д.), глубину (сУо1, do2 и т. д.) опорной поверхности каждого препятствия, а также высоту размещения каждого препятствия (ео1, ео2 и т. д.), измеренную от пола до самой нижней точки препятствия (см. рисунок 17). Кроме того, в протоколе могут быть указаны дополнительные характеристики препятствия, такие как цвет, материал, размеры отдельных деталей.
Рисунок 15 — Примеры препятствий с обозначением передней стороны и начала системы координат
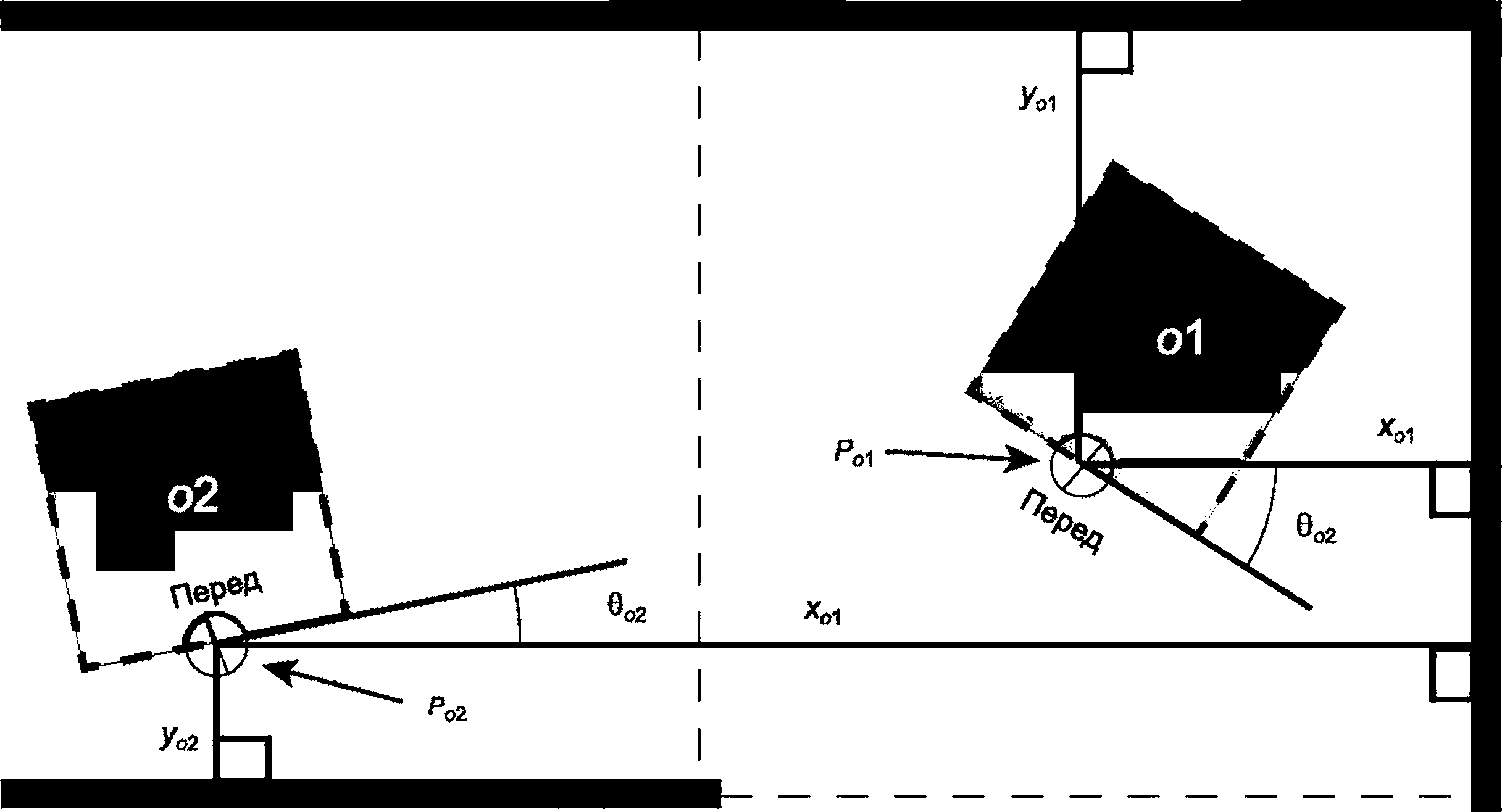
Рисунок 16 — Сверху: оборудование прямого прохода в заданной области с двумя препятствиями (о1 и о2). Снизу: подробное изображение площади препятствий в основании и параметров, определяющих их позиции, ориентации и начала координат
Препятствие 2 (о2)
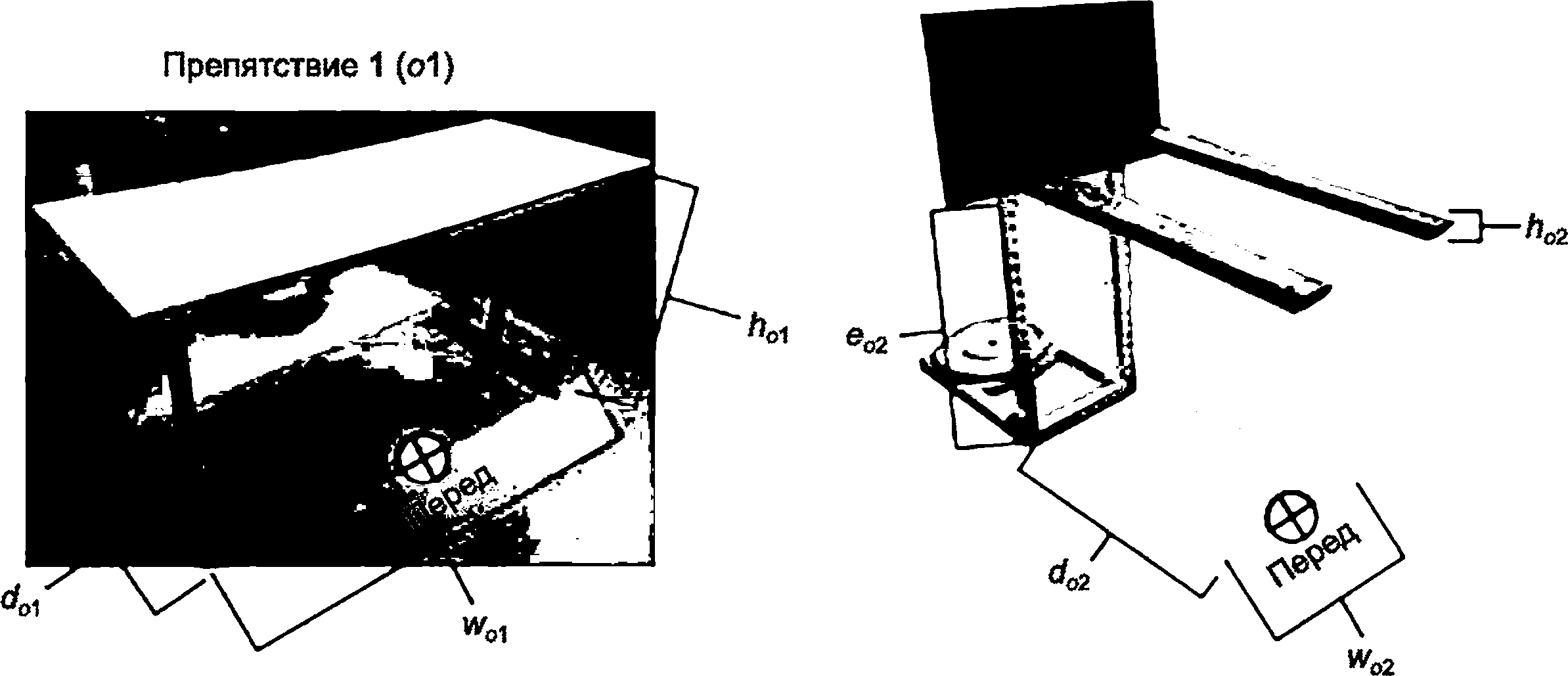
Рисунок 17 — Размеры препятствий и их площади в основании
7.2.1 Расположение препятствий
Позиции и ориентации площади в основании каждого препятствия (|хо1|, |уо1|, 0о1, |хо2|, |уо2|, 0о2 и т. д.) регистрируют относительно начала координат препятствия (ро1, ро2 и т. д.) и ограждений заданной области (см. рисунок 16). |хо1|, |уо1|, |хо2|, |уо2| обозначают абсолютные значения координат.
7.2.2 Постоянство препятствий
Характеристики всех использованных препятствий не должны изменяться во время испытаний, за исключением случая, когда препятствие содержит гибкие элементы (например, шторка для холодной зоны), которые могут изменять свою форму или размеры не в результате столкновения с ПТР. Например, гибкая шторка может двигаться под воздействием потока воздуха во внешней среде.
7.2.2.1 Если препятствие повреждается во время испытаний, изменяя свою форму и/или размеры, либо оно изменяет свое расположение в заданной области, то ПТР может взаимодействовать с препятствием иначе, чем он взаимодействовал с препятствием до его повреждения или перемещения. Если характеристики препятствия изменяются, то оно рассматривается как новое препятствие, отличающееся от прежнего. Поэтому препятствия не могут изменяться и должны оставаться неизменными на протяжении всего испытания. Если препятствие повреждается или смещается в результате столкновения с ПТР, вызвавшего изменение его формы или других характеристик, то руководитель испытаний должен вернуть препятствие в его исходные позицию и ориентацию, а результат данной попытки признать неуспешным (см. 10.3.3).
7.2.3 Осведомленность о препятствии
Существует несколько возможных условий осведомленности ПТР о препятствиях.
7.2.3.1 «Неполная осведомленность, физическое присутствие» — препятствия, присутствующие в физическом пространстве, виртуально не присутствуют на карте, которую ПТР использует для навигации, что означает, что ПТР не осведомлен о препятствиях до тех пор, пока он не обнаружит их с помощью своих датчиков. Данное условие также соблюдается, если препятствия находятся в диапазоне обнаружения, когда ПТР находится на исходной позиции до начала испытания. Но если ПТР формирует собственную карту заданной области до начала испытания, то он должен сделать это без присутствия препятствий, а после формирования карты препятствия могут быть внесены в заданную область до начала испытания.
7.2.3.2 «Полная осведомленность» — препятствия, присутствующие в физическом пространстве, виртуально присутствуют и на карте, предоставленной ПТР, т. е. ПТР осведомлен о наличии препятствий и может спланировать свое поведение до обнаружения препятствий своими датчиками. При данном условии края препятствий эквивалентны ограждениям и могут быть использованы ПТР для установления расположения препятствий. Если ПТР формирует собственную карту заданной области до начала испытания, то ему необходимо сделать это при наличии препятствий в заданной области.
7.2.3.3 «Неполная осведомленность, виртуальное присутствие» — препятствия виртуально присутствуют на карте, предоставленной ПТР, но они не присутствуют в физическом пространстве. Это 18
означает, что ПТР предполагает о наличии препятствий в указанных позициях, но не обнаруживает их своими датчиками. Если ПТР формирует собственную карту заданной области до начала испытания, то он делает это при наличии препятствий в заданной области, но перед началом испытания препятствия следует удалить.
7.2.3.4 Условие осведомленности ПТР относительно каждого препятствия должно поддерживаться для всех попыток проведения испытания для того, чтобы все попытки выполнялись в равных условиях и полученные результаты возможно было сопоставить. Руководитель испытаний с помощью оператора ПТР проверяет перед началом каждой попытки, что осведомленность ПТР о препятствиях приведена в надлежащее исходное состояние (например, просматривая внутреннюю карту ПТР на экране).
7.3 Ухудшение условий связи
В заданной области может быть введено ухудшение связи как часть навигационных испытаний. Характеристики ухудшения связи фиксируют в протоколе испытаний.
8 Требования безопасности
8.1 ПТР должен иметь надлежащим образом сконфигурированную систему обеспечения безопасности, соответствующую требованиям по функционированию автономных транспортных средств.
8.2 Оператор ПТР должен иметь возможность вмешаться в работу ПТР в любое время в процессе испытаний.
8.3 Помимо раздела 2, где перечислены стандарты, касающиеся безопасности и охраны здоровья людей, пользователям метода испытаний, установленного в настоящем стандарте, также следует рассмотреть вопросы сохранности оборудования и совместимости людей и ПТР.
8.4 При выполнении каждого задания в зоне проведения испытаний запрещается нахождение обслуживающего персонала. Несмотря на то, что оператор ПТР инициирует начало испытания с исходной позиции, он должен оставаться вне зоны проведения испытаний и не должен контактировать с ПТР при выполнении каждого задания.
8.5 Физические ограждения могут представлять опасность и нанести вред находящимся поблизости людям или ПТР. Например, физические ограждения могут упасть на людей или оборудование, а объекты, находящиеся на ПТР, выпасть или вызвать другие опасности. Руководитель испытаний, техник-испытатель и оператор ПТР — единственные люди, которым разрешено находиться в непосредственной близости от зоны проведения испытаний.
8.6 Из-за возможных рисков, создаваемых испытательной средой и испытуемым ПТР, руководителю испытаний, технику-испытателю и оператору ПТР необходимо выполнить полную оценку риска в испытательной зоне и вблизи нее и согласовать ее выводы. Они должны учитывать потенциальные опасности, исходящие от ограждений, испытательного оборудования и ПТР во время испытаний.
8.7 Данные правила необходимо довести до сведения всего персонала, задействованного в проведении испытаний. На случай возникновения неконтролируемых событий необходимо предусмотреть аварийный план.
9 Определение характеристик и показателей
9.1 Конфигурацию ПТР при проведении испытаний подробно описывают в протоколе испытаний, включая все подсистемы и компоненты с их характеристиками и функциональными возможностями. Конфигурация испытуемого ПТР должна соответствовать его конфигурации для применения по назначению в реальных условиях. Каждую конфигурацию ПТР необходимо проверить при всех условиях и ограничениях, установленных заказчиком испытаний. При любом изменении конфигурации ПТР и/или параметров испытаний данное испытание должно быть признано несостоявшимся.
9.2 После начала испытания, заданного заказчиком испытаний, ПТР должен выполнить каждую попытку указанное число раз. Во время испытания не допускается какое-либо физическое или управленческое вмешательство оператора, включая регулировку, техническое обслуживание или ремонт. Любые подобные действия должны трактоваться как неуспешная попытка (см. также 10.3). Для некоторых конфигураций ПТР, например при буксировке, возврат на исходную позицию для повторения прохождения маршрута не может быть осуществлен движением задним ходом по той же траектории. В таких случаях примененный метод испытания должен позволить ПТР вернуться на исходную позицию с выходом за пределы испытательного оборудования, но оставаясь в режиме автоматического управления. Только в исключительных случаях допускается ручное управление оператором для возврата ПТР на исходную позицию для продолжения испытания.
9.3 Критерием успешности испытания является выполнение ПТР заданного числа попыток в соответствии с намеченным поведением, установленным заказчиком испытаний, без каких-либо сбоев; например, ПТР пересекает линию финиша и подъезжает к конечной цели или намеренно останавливается из-за ухудшения условий. Исходные параметры для данных методов испытаний определены в 4.3.
9.4 Необходимо измерять и регистрировать в протоколе испытаний время, затраченное на выполнение каждой попытки.
9.5 Заказчик испытаний и руководитель испытаний должны согласовывать и иметь право задавать условия освещенности и другие параметры внешней среды, которые могут повлиять на результаты испытаний. Руководителю испытаний следует убедиться, что условия внешней среды соответствуют условиям, определенным в составленном и утвержденном плане проведения испытаний.
9.6 Показатели статистической надежности результатов могут быть получены в результате проведения целого ряда испытаний. Вероятность успеха ПТР (надежность) определяют в результате успешного завершения заданного числа попыток. Статистические показатели, определяемые с помощью испытания, которые следует использовать для определения успешности прохождения ПТР данного испытания, должны быть равны или превосходить заданные значения. Необходимо установить надежность (вероятность успеха) ПТР Н при выполнении задания с конкретными параметрами оборудования и ПТР, а также связанную с этим доверительную вероятность/?. Установленные значения Н \лД, заданные поставщиком ПТР, определяют необходимое число успешных попыток при выполнении испытания, как показано в таблице 1. Заказчик испытаний имеет право задать значения Н и Д в соответствии со своими целями испытаний либо он может установить минимальное число выполняемых попыток для данного метода испытаний. Факторами, которые следует учитывать при определении значений Н и Д, являются: тип задания, соответствие условиям эксплуатации, возможность выполнения необходимого числа попыток и материальные затраты на испытания, связанные со временем и персоналом. Для обеспечения соответствия статистической значимости, установленной регулирующим органом как не менее 90 %-ной вероятности успеха при 95 %-ной доверительной вероятности, при любых заданных параметрах испытательного оборудования и ПТР число ошибок (незавершенных попыток или возникновений неисправного состояния) должно быть равно нулю при выполнении не менее 30 (потенциально независимых) попыток. Число попыток выполнения задания должно возрастать для достижения большего значения доверительной вероятности Д при планируемой более высокой вероятности успеха Н.
Таблица 1 — Число повторений, необходимое для достижения разной доверительной вероятности, в зависимости от порога вероятности успеха при отсутствии неудачных попыток
Доверительная вероятность | Порог вероятности успеха | ||
0,99 | 0,95 | 0,9 | |
0,99 | 459 | 90 | 44 |
0,95 | 299 | 59 | 29 |
0,9 | 230 | 45 | 22 |
0,85 | 189 | 37 | 19 |
0,8 | 161 | 32 | 16 |
10 Порядок проведения испытаний
10.1 Для обеспечения повторяемости данных и организации испытаний руководитель испытаний должен сначала получить и зарегистрировать информацию, предваряющую испытания, используя форму, представленную на рисунке 18.
Примечание — Более подробное описание отдельных элементов формы протокола испытаний приведено далее по тексту в разделе 10.
Стандартный метод навигационных испытаний в заданной области
ДАТА: -----------------
МЕСТО: _______________
АДРЕС: ----------------
ИСПЫТАНИЕ: ---------------
СРЕДА: ----------------
ИЗГОТОВИТЕЛЬ:------------------
МОДЕЛЬ ПТР: __________________
КОНФИГУРАЦИЯ:__________________
ОПЕРАТОР: ------------------
ОРГАНИЗАЦИЯ: ------------------
ЗАКАЗЧИК: -------------------
РУКОВОДИТЕЛЬ:__________________
ТЕХНИК: ____________________
Ns ИСПЫТАНИЯ: ------------------
ПОПЫТКИ: -----------------
ИСХОДНЫЕ ПАРАМЕТРЫ ИСПЫТАНИЯ
Ограждения Параметры трассы Маршрут
Тип области
I | Прямой проход | и |
ш | Угловое пересечение | ш |
и | Т-образное пересечение | |
ш | Другой (см. чертеж на следующей странице) |
Ухудшение условий
Угловое пересечение
Связь
(Если тип области прямой проход, Физические угловое или Т-образное пересече
ние; если другой, см. чертеж на Виртуальные следующей странице)
Шха: И В:
F71 Ув- RI
Ю /х«: Ш
[J] EDd3:
Е]d4:
Попытки выполнения задания
Старт: А
Финиш:__(В или С)
Движение ПТР: Передом Задом
Е1 Ё
Намеченное поведение
Ш Эффективность достижения цели
ГТ] Макс, время выполнения задания:_с
и Дополнительные
критерии успеха
Время Время Длитель-старта финиша кость, с
И | 2 | — | |
и | 3 | — | |
и | 4 | — | |
и | 5 | S | |
и | 6 | — | |
и | S | ||
и | 8 | — | |
и | 9 | — | |
и | 10 | — | |
Общая длительность попыток 1-10, с | |||
Время Время Длителы-старта финиша ность, с
и | 11 | а |
и | 12 | = |
и | 13 | = |
и | 14 | = |
□ | 15 | — |
и | 16 | — |
и | 17 | S |
и | 18 | S |
и | 19 | SS |
и | 20____ | = |
Общая длительность попыток 11-20, с
и | Время старта 21 | Время Дпитель-финиша ность, с | |
И | 22 | — | |
и | 23 | — | |
и | 24 | — | |
и | 25 | — | |
и | 26 | — | |
и | 27 | — | |
и | 28 | — | |
и | 29 | — | |
и | 30____- | = | |
Общая длительность | |||
попыток 21-30, с
ЧИСЛО МАРШРУТА В ОБЩЕЕ ЗАТРАЧЕННОЕ СРЕДНЯЯ ПОПЫТОК ПОПЫТКЕ, М РАССТОЯНИЕ, М ВРЕМЯ, С СКОРОСТЬ
Примечания:
Техник-испытатель:______________________________
Рисунок 18 — Пример формы протокола испытаний (лист 1)
Стандартный метод навигационных испытаний в заданной области
Чертеж оборудования для данного метода испытаний с размерами и пометками: (нанести исходную и целевую позиции, размеры всех областей и ограждений, высоту всех ограждений, любые дополнения, необходимые для целей навигации, например QR-коды, магнитную ленту, расположение препятствий при их наличии и т. д.)
Техник-испытател ь:__________________________________
Стандартный метод навигационных испытаний в заданной области
Препятствия:
(отметить число использованных препятствий, заполнить информацию о них; для переменных, задающих расположение препятствия, например х, у и 9, проверить, что они нанесены на чертеж на предыдущей странице)
Препятствие 1 (о1) [Vj Препятствие 2 (о2) Препятствие 3 (оЗ)
xoi:_________ | Хог:_________ | Хоз:. | |
Уоь------- | Ул.------- | Уоз:. | |
Опорная | Опорная | Опорная | |
поверхность - | Вл:______ поверхность - | бог:------- поверхность - | 8оз\ |
препятствия | препятствия | препятствия | |
И*о1-- | Wo2-- | И^оЗ- | |
_ | dos- | ||
и» | |||
Физическое | Физическое | Физическое | hto.: |
препятствие | во1._______ препятствие | ______ препятствие | &ОЗ-. |
j Препятствие4(о4) Препятствие5(об)
х*:_______ | Xos:_________ | |
Уо*:--------- | У<«:_________ | |
Опорная | Опорная | |
поверхность - | поверхность - Sos:_______ | |
препятствия | ю*:______ | препятствия Wog:-------- |
d^:------- | ||
Физическое | Физическое Лоб‘ | |
препятствие | препятствие " во5;_______ |
Осведомленность о препятствии
И Полная осведомленность, присутствует виртуально
Полная осведомленность
Неполная осведомленность, присутствует физически
Чертежи препятствий с размерами и пометками:
(если препятствия используются при испытаниях, то привести чертежи или схемы с размерами, где показать переднюю сторону и начало координат)
Техник-испытателы________________________________
10.1.1 «Дата» — дата проведения испытаний. Некоторые методы испытаний, когда это четко заявлено, могут допускать выполнение попыток в течение нескольких дней. Информацию о времени проведения испытаний также допускается приводить в данном поле.
10.1.2 «Место» — наименование организации или полигона, в которой/на котором проводят испытания.
10.1.3 «Адрес» — наименование населенного пункта, района или области, на территории которых проводят испытания.
10.1.4 «Испытание» — причина, по которой было заказано проведение данного испытания. В данном поле следует указать «Общее», если ПТР испытывают только с целью определения его рабочих характеристик без какой-либо другой причины.
10.1.5 «Среда» — условия, при которых будет проведено данное испытание, включая уровень освещенности, температуру, влажность и поверхность передвижения. Заказчик испытаний по согласованию с руководителем испытаний имеет право задавать эти условия.
10.1.6 «Изготовитель» — наименование изготовителя или разработчика ПТР и их контактная информация.
10.1.7 «Модель ПТР» — собственное наименование и номер модели, включая любое расширение или примечание, полностью идентифицирующее конкретную модель испытуемого робота.
10.1.8 «Конфигурация» — перечень параметров программного и аппаратного обеспечения. Данные параметры вносятся перед началом испытаний и не могут изменяться в процессе испытаний.
10.1.9 «Оператор» — фамилия и инициалы оператора ПТР, наименование организации, в которой работает оператор, и контактная информация.
10.1.10 «Организация» — наименование и контактная информация организации, в которой данный ПТР должен быть установлен и использован.
10.1.11 «Заказчик испытаний» — фамилия и инициалы заказчика испытаний, организация, которую он представляет, и контактная информация.
10.1.12 «Руководитель испытаний» — фамилия и инициалы руководителя испытаний, организация, которую он представляет, и контактная информация.
10.1.13 «Техник-испытатель» — фамилия и инициалы сотрудника (сотрудников), непосредственно проводящего испытания, организация, которую он представляет, и контактная информация.
10.1.14 «Номер испытания» — номер, под которым зарегистрировано данное испытание, возможно, в серии испытаний или при повторении испытания. Если данное испытание проводится только один раз, то значением по умолчанию является 1.
10.1.15 «Попытки» — число успешных попыток, необходимое для того, чтобы испытание было признано успешным.
10.1.16 «Исходные параметры испытания» — исходные параметры, при которых выполняются испытания (см. рисунки 2—8 и 11):
10.1.16.1 «Тип области» — следует указать тип заданной области: прямой проход, угловое пересечение, Т-образное пересечение или другой (большего размера, более сложная заданная область, например такая, как показана на рисунке 11).
10.1.16.2 «Ограждения» — следует указать тип ограждений, использованных для обозначения заданной области (физические ограждения, виртуальные ограждения, напольная разметка или их комбинации; указать все примененные ограждения).
10.1.16.3 «Параметры трассы» — следует указать значения всех параметров, определяющих конфигурацию заданной области. Если заданная область представлена прямым проходом, угловым или Т-образным пересечением, то параметрами являются (ха, уа, 1ха, 1уа, 0, d^, d2, d3, с/4). Если заданная область другого типа, то ее параметры следует указать на чертеже оборудования для данного метода испытаний на второй странице протокола. На чертеже необходимо указать высоту ограждений (/?Ь1, hb2, h!bV hlb2 и т Д )-
10.1.16.4 «Маршрут» — следует указать целевую позицию (В или С) и примерный маршрут из А в В или С.
10.1.16.5 «Движение ПТР» — следует указать движение ПТР с линии старта до линии финиша. Обычно это движение прямым или задним ходом, но могут потребоваться дополнительные подробности для всенаправленных мобильных платформ.
10.1.16.6 «Ухудшение условий» — следует указать, какие ухудшения условий используются при испытании. Подробности использования препятствий приводят на третьей странице протокола для каждого препятствия. Другим ухудшением условий является ухудшение связи.
10.1.16.7 «Намеченное поведение» — следует выбрать критерий успешности выполнения задания. Если требуется, чтобы ПТР достиг целевой позиции в каждой попытке, то выбирают опцию «Эффективность достижения цели». Если не требуется обязательное достижение ПТР целевой позиции (например, если присутствуют ухудшения условий), то данную опцию не выбирают. Если требуется, чтобы ПТР выполнил попытку за заданное время, то следует отметить опцию «Макс, время выполнения задания» и указать время в секундах. Если для ПТР установлены другие критерии успешности выполнения задания, то их указывают в поле «Дополнительные критерии успеха».
10.1.17 В нижней части протокола испытаний в разделе «Примечания» может быть приведена дополнительная информация, например наименования файлов, используемых для регистрации хода испытания и характеристик выполнения задания.
10.1.18 На второй странице протокола испытаний приводят чертеж испытательной трассы с указанием всех размеров.
10.1.19 Если в навигационных испытаниях используют ухудшение условий в виде препятствий, то информацию о них приводят на третьей странице протокола.
10.1.19.1 Обмеры препятствий
Следует отметить каждое используемое препятствие (от 1 до 5) и привести для них размерные параметры площади препятствия в основании (|хо1|, |уо11, 6о1, и/о1, с/о1, |хо2|, |уо2|, 9о2, wo2, ^о2 и т- д-)> а для физических препятствий еще и (/7о1, ео1, ho2, ео2 и т. д.).
10.1.19.2 Осведомленность о препятствии
Следует выбрать тип осведомленности о препятствиях, используемых при испытаниях: неполная осведомленность, физическое присутствие; полная осведомленность; неполная осведомленность, виртуальное присутствие.
10.1.19.3 Чертежи препятствий
Следует привести чертежи или схемы препятствий с указанием размеров и обозначением передней стороны и начала координат каждого препятствия.
10.2 Построение ограждений (физических ограждений, виртуальных ограждений
и напольной разметки)Следует показать заданную область, в которой функционирует ПТР во время испытания, линии ограждений и область, определенную как соседняя.
10.2.1 Заданная область (см. рисунки 2—8, 11, 12 и 14)
Следует задать размерные параметры физических и виртуальных ограждений и напольной разметки, где это применимо (ха, уа, 1ха, 1уа, 0, d^, d2, d3, d4, hb1, hb2, hlbV hlb2 и т. д.).
10.2.2 Ограждения
Ограждения должны быть построены так, чтобы полностью обозначить пространство для проведения испытаний. Они не должны сдвигаться на протяжении всех испытаний. Если их смещение необходимо для возврата ПТР на линию старта не в качестве части испытания, то после этого ограждения должны быть возвращены точно на прежнее место. Все размеры ограждений должны быть внесены в протокол испытаний (см. рисунок 12).
10.2.3 Напольная разметка
Виртуальную или физическую напольную разметку используют, где это возможно, для моделирования ограждений при работе ПТР в соответствии с разделом 6. Если используется напольная раз-метка, то она должна быть различима по всей испытательной трассе. Если используются маркеры или мишени, то их размещают на ПТР и/или грузе, как указано в 6.2 и 6.3, для визуальной индикации расположения самых крайних точек ПТР и/или груза (включая область захвата датчиком безопасности, если он подлежит испытанию) относительно ограждений трассы. Маркеры должны показывать те места ПТР, которые являются ближайшими к напольной разметке.
10.2.4 Фиксация времени
Необходимо регистрировать время, затраченное на перемещение от линии старта до линии финиша. После выполнения задания ПТР может вернуться на линию старта по заданной области либо вне ее. Время, затраченное на возврат к линии старта, не учитывается как часть испытания.
10.2.5 Повторение выполнения задания
Следует выполнить столько попыток выполнения задания, сколько было запланировано. В таблице 1 приведена информация о числе успешных попыток, необходимых для получения разных значений доверительной вероятности.
10.3 Неудачное выполнение задания и всего испытания
Если в процессе движения ПТР выезжает за пределы заданной области и/или сталкивается с какими-либо объектами, то испытание считается неудачным. ПТР необходимо остановить, а причину данной неудачи занести в протокол. Требования настоящего стандарта считаются выполненными, если ПТР завершил всю совокупность попыток в соответствии с разделом 4 (задание исходных параметров, порядок выполнения и т. д.). Все неудачные попытки и последующие необходимые действия должны быть занесены в протокол.
10.3.1 Разряд батареи
Если источник питания ПТР отказывает во время выполнения задания, то это фиксируют в протоколе, а данную попытку признают неудачной. Батарея может быть заменена или заряжена между выполнением попыток, но остальная конфигурация ПТР должна оставаться неизменной.
10.3.2 Столкновение с ограждениями
Любое столкновение с ограждениями регистрируют в протоколе испытаний с указанием попытки, в которой оно произошло, и части ПТР, столкнувшейся с ограждением, следующим образом:
10.3.2.1 Физическое ограждение
Если какая-либо часть ПТР столкнулась с физическим ограждением или ПТР не может продолжить свое движение, то данная попытка и все испытание признаются неудачными, испытание необходимо прекратить, а место остановки указать в протоколе.
10.3.2.2 Виртуальные ограждения и напольная разметка
Если маркер или мишень на ПТР нарушает виртуальное ограждение или маркеры краев ПТР обнаружены вне пределов заданной области либо ПТР не может продолжить свое движение, то данная попытка и все испытание признаются неудачными, испытание необходимо прекратить, а место остановки указать в протоколе.
10.3.3 Столкновение с препятствиями
Любое столкновение с препятствиями регистрируют в протоколе с указанием попытки, в которой оно произошло, препятствия и части ПТР, столкнувшейся с препятствием. Если ПТР сталкивается с препятствием или не может продолжить свое движение, то данная попытка и все испытание признаются неудачными, испытание необходимо прекратить, а место остановки указать в протоколе.
10.3.4 Условия, при которых работа ПТР признается неудачной
10.3.4.1 Вмешательство человека
Не допускается внесение изменений в конфигурацию или оборудование ПТР, проходящего испытания. Внесение изменений в ПТР, например проведение регулировки, изменение конфигурации, техническое обслуживание или ремонт во время паузы в испытаниях, считается неисправным состоянием. Вмешательство человека между выполнением попыток не запрещено, если оно не приводит к изменению конфигурации ПТР или параметров испытания. (Изменение конфигурации, произведенное собственным управляющим программным обеспечением ПТР без участия человека, допустимо в любое время.)
10.4. 3.2 Операция аварийной остановки
Любое использование аварийной остановки является неудачей испытания. Данный критерий является существенным, так как в противном случае аварийная остановка может быть использована для предотвращения выхода ПТР за пределы заданной области или для изменения динамических характеристик ПТР.
10.3. 5 Протоколирование отказов
Если возникает неисправное состояние или отказ, то испытание останавливают и заполняют отчет об испытаниях. Новое испытание может быть проведено с использованием других параметров испытания (например, других размеров оборудования, других условий внешней среды) и составлением протокола независимо от неудачного испытания.
10. 4 Подготовка к испытанию с ухудшением условий
Если используются ухудшения условий, то следует выполнить надлежащую подготовку (например, расстановку препятствий в заданной области, настройку способа ухудшения связи).
10.4. 1 Исходное испытание
Перед тем, как выполнять испытание с ухудшением условий, следует выполнить исходное испытание без ухудшения условий, чтобы убедиться в том, что ПТР может успешно перемещаться в
заданной области. Кроме того, данные, полученные в результате данного испытания, могут быть использованы для сравнения с результатами испытаний с ухудшением условий.
10.4. 2 Осведомленность о препятствиях
Если используется ухудшение условий за счет внесения препятствий, то существуют дополнительные шаги по подготовке к проведению испытаний.
10.4.2. 1 Неполная осведомленность, физическое присутствие
Если ПТР создает свою собственную карту местности перед началом испытания, то он должен сделать это без присутствия препятствий в заданной области. Затем препятствия устанавливают до начала испытаний.
10.4.2. 2 Полная осведомленность
Если ПТР создает собственную карту местности перед началом испытания, то он должен сделать это при наличии препятствий в заданной области.
10.4.2. 3 Неполная осведомленность, виртуальное присутствие
Если ПТР создает собственную карту местности перед началом испытания, то он должен сделать это при наличии препятствий в заданной области, но затем препятствия удаляют из заданной области до начала испытаний.
10. 5 Порядок проведения испытаний
10.5. 1 В начале испытаний руководитель испытаний устанавливает и проверяет оборудование или параметры маршрута, после чего объявляет число попыток, которые необходимо выполнить.
10.5. 2 Руководитель испытаний и заказчик испытаний согласовывают и проверяют условия проведения испытаний, например требования к поверхности перемещения, условия внешней среды и т. д. Условия проведения испытаний фиксируют в протоколе.
10.5. 3 Оператор ПТР определяет, будет ли испытание проведено с полезной нагрузкой. Технику-испытателю, ответственному за программирование/обучение ПТР должно быть разрешено произвести наладку ПТР и выполнить тестовые прогоны до передачи управления оператору ПТР, после чего начинается само испытание.
10.5. 4 Оператор ПТР либо воздерживается от проведения испытания, либо начинает испытание. После этого воздержаться от проведения испытания не допускается.
10.5. 5 Техник-испытатель дает команду оператору ПТР начать выполнение задания, запускает таймер, когда весь корпус ПТР пересечет линию старта, и регистрирует общее время, затраченное на выполнение задания. Оператор ПТР размещает робота на линии старта и приступает к испытанию.
10.5. 6 Оператор выдает команду ПТР выполнить задание по перемещению так, чтобы весь корпус ПТР пересек линию финиша. Оператор ПТР может не контролировать перемещение робота в процессе проведения испытания.
10.5. 7 Руководитель испытаний и оператор ПТР согласовывают возвращение ПТР на линию старта после достижения конечной цели или остановку испытания, обозначая завершение выполнения одной попытки. Руководитель испытаний фиксирует результаты в протоколе испытаний. Руководитель испытаний должен приостановить общее время проведения испытания и, если необходимо, позволить оператору связаться с ПТР, вернуть ПТР обратно на исходную позицию и возобновить испытание по команде руководителя испытаний. Если ПТР не может выполнить задание, это соответствует неисправному состоянию, при котором частично выполненное задание не засчитывается.
10.5. 8 Чтобы обеспечить соответствие требованиям настоящего стандарта, установленным в 9.6, необходимо выполнить несколько попыток. ПТР повторяет выполнение задания до тех пор, пока не будут завершены все попытки либо пока не возникнет какое-либо из неисправных состояний, указанных в 10.3.
10.5. 9 После завершения успешного выполнения заданного числа попыток с установленными параметрами оборудования данное испытание заканчивается.
11 Требования к отчетности
11.1 Данный метод испытаний требует оформления протокола испытаний. Пример формы протокола испытаний показан на рисунке 18. Заказчик испытаний может также потребовать, чтобы в протокол была внесена дополнительная информация, относящаяся к данному испытанию. Протокол должен содержать приведенные ниже данные наряду с информацией о проведении испытаний и результатами испытаний.
11.2 Предварительная информация об испытании — в соответствии с 10.1.
11.3 Исходные параметры и соответствующие единицы и диапазоны измерения
Необходимо представить эскиз заданного пространства с указанием всех размеров.
11.4 Маршрут ПТР
Представляют резюме навигационных испытаний, порядок выполнения начальных настроек и маршрут перемещения ПТР во время выполнения поставленного задания. Должны быть указаны и зафиксированы другие параметры, характеризующие задание, включая способ возвращения на исходную позицию. Способом возвращения на исходную позицию может быть перемещение по тому же маршруту задним ходом, автоматическое перемещение вне пределов заданной области или возвращение ПТР в режиме ручного управления.
11.5 Конфигурация
Все данные о конфигурации ПТР необходимо занести в протокол. Это легко осуществить, записав все конфигурационные файлы ПТР до начала испытания. Обычно эти данные включают сведения о версиях аппаратного и программного обеспечения ПТР и все настройки, определяющие рабочие характеристики ПТР.
11.6 Следует зарегистрировать важные наблюдения во время испытания, включая возникшие конкретные неисправные состояния, причины отказа от испытания, любые наблюдения руководителя испытаний, которые могут дополнить результаты в положительную или отрицательную сторону, или любые комментарии оператора ПТР, которые он захочет внести в протокол.
11.7 Примерная форма протокола, показанная на рисунке 18, должна быть полностью заполнена. Если какое-либо поле в протоколе не относится к данному испытанию, то это необходимо указать.
11.8 Для обозначения результатов испытания используют следующие формулировки: «неучастие», «успешное» и «неуспешное», означающие следующее:
11.8.1 «Неучастие» — оператор ПТР или заказчик испытаний отказываются начать испытания.
11.8.2 «Успешное» — все заданные попытки были выполнены без ошибок в соответствии с намеченным поведением в качестве критерия успеха (см. 4.3.8).
11.8.3 «Неуспешное» — испытание признается неуспешным, когда ПТР не смог завершить выполнение попытки в соответствии с намеченным поведением в качестве критерия успеха (см. 4.3.8). Возвращение на исходную позицию может не являться частью выполнения попытки.
11.9 Конкретная форма протокола испытаний не стандартизована. Поэтому допускается использовать разные формы протокола, но соответствующие требованиям к отчетности настоящего стандарта.
12 Погрешность и систематическая ошибка
Испытание, проводимое в соответствии с настоящим стандартом, оценивается по принципу успешное/неуспешное после выполнения заданного заказчиком испытаний числа попыток. Другими словами, такое испытание имеет неколичественную оценку и поэтому вопросы погрешности и систематической ошибки не рассмотрены в данном методе испытаний. Однако важно, чтобы в протоколе испытаний была приведена достаточная информация о ПТР и оборудовании для того, чтобы данное испытание могло быть неоднократно точно повторено с целью проведения сравнительного анализа. В частности, время измеряют с погрешностью не более 1 с, пройденное расстояние следует фиксировать в дециметрах или точнее, а размеры — измерять с погрешностью не более 1 см.
УДК 621.865.8:007.52:006.86:006.354
ОКС 25.040.30
43.020
35.240.60
Ключевые слова: роботы, робототехнические устройства, мобильные роботы, методы испытаний, навигационные испытания, промышленные транспортные роботы, порядок проведения испытаний, испытательное оборудование
Редактор М.В. Митрофанова Технический редактор В.Н. Прусакова Корректор М.И. Першина Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 28.09.2023. Подписано в печать 10.10.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 4,18. Уч.-изд. л. 3,35.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}