ГОСТ Р 60.2.2.1-2016/ИСО 13482:2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ТРЕБОВАНИЯ ПО БЕЗОПАСНОСТИ ДЛЯ РОБОТОВ ПО ПЕРСОНАЛЬНОМУ УХОДУ
Robots and robotic devices. Safety requirements for personal care robots
ОКС 25.040.30
Дата введения 2018-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным бюджетным учреждением "Консультационно-внедренческая фирма в области международной стандартизации и сертификации "Фирма "ИНТЕРСТАНДАРТ" совместно с Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) и ООО "Корпоративные электронные системы" (ООО "КЭЛС-центр") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 24 ноября 2016 г. N 1756-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 13482:2014* "Роботы и робототехнические устройства. Требования по безопасности для роботов по персональному уходу" (ISO 13482:2014 "Robots and robotic devices - Safety requirements for personal care robots", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Сентябрь 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Безопасность" и распространяется на наземные сервисные роботы. Он идентичен международному стандарту ИСО 13482:2014, разработанному подкомитетом (SC) 2 "Роботы и робототехнические устройства" Технического комитета (TC) 184 ИСО "Системы автоматизации и их интеграция".
Примечание - С 1 января 2016 года ISO/TC 184/SC 2 "Роботы и робототехнические устройства" преобразован в ISO/TC 299 "Робототехника".
Настоящий стандарт разработан вследствие признания наличия конкретных опасностей от появления новых роботов и робототехнических устройств для новых применений в непромышленных сферах, которые предоставляют сервисы, отличающиеся от производственных применений в промышленных сферах. Настоящий стандарт посвящен требованиям безопасности для роботов по персональному уходу в немедицинских применениях.
Настоящий стандарт дополняет ИСО 10218-1, который устанавливает требования безопасности для роботов только в промышленных средах. Настоящий стандарт содержит дополнительную информацию в соответствии с ИСО 12100 и заимствует подход, предложенный в ИСО 13849 и МЭК 62061, что позволяет сформировать стандарт по безопасности для роботов и робототехнических устройств по персональному уходу с целью определения условий для физического контакта человека с роботом.
Настоящий стандарт относится к стандартам типа С в соответствии с ИСО 12100.
Если техническое положение стандарта типа С отличается от одного или нескольких технических положений стандартов типа А или В, то приоритет имеет стандарт типа С.
Общепризнано, что для роботов и робототехнических устройств, применяющихся в задачах по персональному уходу, необходимо рассматривать тесное взаимодействие и сотрудничество между человеком и роботом, а также учитывать наличие физического контакта между ними.
Рассматриваемые роботы и робототехнические устройства, а также охватываемые опасности, опасные ситуации и опасные события изложены в разделе 1 настоящего стандарта.
Опасности хорошо известны, а их источники часто являются уникальными для конкретных робототехнических систем. Число и типы опасностей непосредственно связаны с природой применения роботов, сложностью установки и уровнем необходимого взаимодействия между человеком и роботом.
Риски, связанные с такими опасностями, зависят от типа используемого робота и его назначения, а также от способа его установки, программирования, функционирования и обслуживания.
Не все опасности, отмеченные в настоящем стандарте, относятся к каждому роботу по персональному уходу, так же как и уровень риска, связанный с данными опасностями, не будет одинаковым для разных роботов. Следовательно, требования безопасности и/или меры защиты могут изменяться относительно того, что установлено в настоящем стандарте. Если необходимые для конкретного применения меры защиты не соответствуют требованиям безопасности и/или мерам защиты, определенным в настоящем стандарте, то они определяются в результате выполнения оценки риска.
Признавая разнообразную природу опасностей, связанных с применениями роботов по персональному уходу, настоящий стандарт представляет собой руководство по обеспечению безопасности при проектировании и построении немедицинских роботов по персональному уходу, а также при интеграции, установке и использовании данных роботов, то есть на протяжении всего их жизненного цикла. Поскольку на безопасность использования роботов по персональному уходу влияет проект конкретной робототехнической системы, то дополнительной, хотя и такой же важной целью является обеспечение предоставления рекомендаций по информации, связанной с использованием роботов и робототехнических устройств по персональному уходу.
Требования по безопасности, установленные в настоящем стандарте, должны выполняться изготовителями и поставщиками роботов по персональному уходу.
Последующие издания настоящего стандарта могут содержать более конкретные требования для конкретных типов роботов по персональному уходу и более полные количественные данные для разных категорий людей (например, детей, престарелых людей, беременных женщин).
1 Область применения
Настоящий стандарт определяет требования и рекомендации для проектирования роботов со встроенной безопасностью, мер защиты и информации для использования роботов по персональному уходу, в частности для следующих трех типов роботов по персональному уходу:
- мобильный обслуживающий робот;
- робот для оказания физической помощи;
- робот для перевозки человека.
Эти роботы обычно выполняют задачи по улучшению качества жизни предполагаемых пользователей независимо от их возраста и способностей. Настоящий стандарт описывает опасности, связанные с использованием таких роботов, и устанавливает требования для устранения или снижения рисков, связанных с данными опасностями до приемлемого уровня. Настоящий стандарт охватывает применения, связанные с физическим контактом между человеком и роботом.
Настоящий стандарт представляет существенные опасности и описывает, как их преодолевать для каждого типа робота по персональному уходу.
Настоящий стандарт охватывает робототехнические устройства, используемые для персонального ухода, которые относятся к роботам по персональному уходу.
Область применения настоящего стандарта ограничена наземными роботами.
Настоящий стандарт не применим к:
- роботам, перемещающимся со скоростью свыше 20 км/час;
- роботам-игрушкам;
- морским роботам и летающим роботам;
- промышленным роботам, к которым относится ИСО 10218;
- роботам, используемым в качестве медицинских устройств;
- роботам для военных или полицейских применений.
Примечание - Принципы безопасности, установленные в настоящем стандарте, могут быть использованы для перечисленных выше роботов.
Область применения настоящего стандарта ограничена в основном опасностями, связанными с уходом за людьми, но, когда это подходит, настоящий стандарт может применяться и к домашним животным и имуществу (определенным как объекты, связанные с безопасностью). При этом робот по персональному уходу должен быть правильно установлен и обслуживаться, а также использоваться по своему назначению или в условиях, которые могут быть достаточно предсказуемыми.
Настоящий стандарт не применим к роботам, изготовленным до даты его публикации.
Настоящий стандарт относится ко всем существенным опасностям, опасным ситуациям или опасным событиям, описанным в приложении А. Необходимо отметить тот факт, что для опасностей, связанных с ударом (например, вследствие столкновения), на момент публикации настоящего стандарта не существует исчерпывающих и международно признанных данных (например, ограничения по боли или травмам).
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 2631 (all parts), Mechanical vibration and shock - Evaluation of human exposure to whole-body vibration (Механическая вибрация и удар. Оценка воздействия на человека вибрации всего тела)
ISO 3746, Acoustics - Determination of sound power levels and sound energy levels of noise sources using sound pressure - Survey method using an enveloping measurement surface over a reflecting plane (Акустика. Определение уровней звуковой мощности и звуковой энергии источников шума по звуковому давлению. Ориентировочный метод с использованием измерительной поверхности над звукоотражаю-щей плоскостью)
ISO 3864-1, Graphical symbols - Safety colours and safety signs - Part 1: Design principles for safety signs and safety markings (Графические символы. Сигнальные цвета и знаки безопасности. Часть 1. Принципы проектирования знаков и сигнальной разметки)
ISO 4413, Hydraulic fluid power - General rules and safety requirements for systems and their components (Гидропривод. Общие правила и требования по безопасности для систем и их компонентов)
ISO 4414, Pneumatic fluid power - General rules and safety requirements for systems and their components (Пневмопривод. Общие правила и требования по безопасности для систем и их компонентов)
ISO 4871, Acoustics - Declaration and verification of noise emission values of machinery and equipment (Акустика. Объявление и верификация значений шумового излучения механизмов и оборудования)
ISO 7000, Graphical symbols for use on equipment - Registered symbols (Графические символы для использования на оборудовании. Список и краткое описание)
ISO 7010, Graphical symbols - Safety colours and safety signs - Registered safety signs (Графические символы. Предупредительные цвета и знаки. Зарегистрированные предупредительные знаки)
ISO 8373:2012, Robots and robotic devices - Vocabulary (Роботы и робототехнические устройства. Термины и определения)
ISO 11202, Acoustics - Noise emitted by machinery and equipment - Determination of emission sound pressure levels at a work station and at other specified positions applying approximate environmental corrections (Акустика. Шум, излучаемый механизмами и оборудованием. Определение уровней звукового давления на рабочую станцию и на другие заданные позиции с применением приближенных коррекций внешней среды)
ISO 12100:2010, Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин и механизмов. Общие принципы расчета. Оценивание и снижение рисков)
ISO 13849-1, Safety of machinery - Safety-related parts of control systems - Part 1: General principles for design (Безопасность машин и механизмов. Части систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования)
ISO 13850, Safety of machinery - Emergency stop - Principles for design (Безопасность машин и механизмов. Аварийная остановка. Принципы конструирования)
ISO 13854, Safety of machinery - Minimum gaps to avoid crushing of parts of the human body (Безопасность машин и механизмов. Минимальные расстояния для предотвращения защемления человеческого тела)
ISO 13855, Safety of machinery - Positioning of safeguards with respect to the approach speeds of parts of the human body (Безопасность машин и механизмов. Расположение защитных устройств с учетом скорости приближения частей тела человека)
_______________
Если используется, то необходимо рассмотреть отношение и применимость количественных данных к предполагаемым пользователям робота, особенно для престарелых людей и детей.
ISO 13856 (all parts), Safety of machinery - Pressure-sensitive protective devices (Безопасность машин и механизмов. Защитные устройства, реагирующие на давление)
ISO 13857, Safety of machinery - Safety distances to prevent hazard zones being reached by upper and lower limbs (Безопасность машин и механизмов. Безопасные расстояния для предохранения верхних и нижних конечностей от попадания в опасную зону)
ISO 14118, Safety of machinery - Prevention of unexpected start-up (Безопасность машин и механизмов. Предотвращение неожиданного запуска)
ISO 14119, Safety of machinery - Interlocking devices associated with guards - Principles for design and Selection (Безопасность машин и механизмов. Блокировочные устройства, связанные с защитными устройствами. Принципы конструирования и выбора)
ISO 14120, Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards (Безопасность машин и механизмов. Ограждения. Общие требования к проектированию и строительству стационарных и передвижных ограждений)
ISO 15534 (all parts), Ergonomic design for the safety of machinery (Эргономическое проектирование машин для обеспечения безопасности)
IEC 60204-1:2009, Safety of machinery - Electrical equipment of machines - Part 1: General requirements (Безопасность машин и механизмов. Электрооборудование машин и механизмов. Часть 1. Общие требования)
_______________
Заменен на IEC 60204-1:2016.
IEC 60335-1, Household and similar electrical appliances - Safety - Part 1: General requirements (Бытовые и аналогичные электрические приборы. Безопасность. Часть 1. Общие требования)
IEC 60335-2-29, Household and similar electrical appliances - Safety - Part 2-29: Particular requirements for battery chargers (Бытовые и аналогичные электрические приборы. Безопасность. Часть 2-29. Конкретные требования для зарядных устройств аккумуляторов)
IEC 60417-1 Graphical symbols for use on equipment - Part 1: Overview and application (Графические символы для использования на оборудовании. Часть 1. Обзор и применение)
_______________
Заменен на IEC 60417-ОВ-12М:2002.
IEC 60529, Degrees of protection provided by enclosures (IP Code) [Степени защиты, обеспечиваемые оболочками (Код IP)]
IEC 60825-1, Safety of laser products - Part 1: Equipment classification and requirements (Безопасность лазерной аппаратуры. Часть 1. Классификация оборудования и требования)
IEC 61140, Protection against electric shock - Common aspects for installation and equipment (Защита от поражения электрическим током. Общие положения по безопасности для электрооборудования и электроустановок)
IEC 61496 (all parts), Safety of machinery - Electro-sensitive protective equipment (Безопасность машин. Электрочувствительные предохранительные устройства)
IEC 62061:2012, Safety of machinery - Functional safety of safety-related electrical, electronic and programmable electronic control systems (Безопасность машин и механизмов. Функциональная безопасность систем управления электрических, электронных и программируемых электронных, связанных с безопасностью)
IEC 62471, Photobiological safety of lamps and lamp systems (Лампы и ламповые системы. Светобиологическая безопасность)
3 Термины и определения
В настоящем документе применены термины по ИСО 12100 и ИСО 8373, а также следующие термины и определения:
3.1
автономность (autonomy): Способность выполнять поставленные задачи в зависимости от текущего состояния и восприятия окружающей среды без вмешательства человека. |
[ИСО 8373:2012, 2.2] |
3.2
робот (robot): Исполнительный механизм с двумя или более степенями подвижности, обладающий определенным уровнем автономности (3.1) и перемещающийся во внешней среде с целью выполнения поставленных задач. |
[ИСО 8373:2012, 2.6, модифицировано] |
3.3
робототехническое устройство (robotic device): Исполнительный механизм, обладающий свойствами промышленного или сервисного робота (3.4), но у которого отсутствует требуемое число программируемых степеней подвижности или определенный уровень автономности (3.1). |
[ИСО 8373:2012, 2.8, модифицировано] |
3.4
сервисный робот (service robot): Робот (3.2), выполняющий нужную для человека или оборудования работу, за исключением применений в целях промышленной автоматизации. |
[ИСО 8373:2012, 2.10, модифицировано] |
3.5
мобильный робот (mobile robot): Робот (3.2), способный передвигаться под своим собственным управлением. |
[ИСО 8373:2012, 2.13, модифицировано] |
3.6
опасность (hazard): Потенциальный источник причинения вреда, ущерба здоровью. |
[ИСО 12100:2010, 3.6, модифицировано] |
3.7
риск (risk): Сочетание вероятности нанесения и степени тяжести возможного ущерба или вреда здоровью. |
[ИСО 12100:2010, 3.12] |
3.8
общая оценка риска (risk assessment): Общий процесс, включающий в себя анализ и оценку риска. |
[ИСО 12100:2010, 3.17, модифицировано] |
3.9
безопасное состояние (safe state): Состояние робота по персональному уходу (3.13), при котором отсутствует надвигающаяся опасность. |
[ИСО 10218-2:2011, 3.11, модифицировано] |
3.10
элемент системы управления, связанный с обеспечением безопасности (safety-related part of a control system): Элемент или компонент элемента в системе управления, который реагирует на входные сигналы и вырабатывает выходные сигналы, связанные с обеспечением безопасности. |
[ИСО 13489-1:2006, 3.1.1, модифицировано] |
3.11
верификация (verification): Подтверждение посредством предоставления объективных свидетельств того, что установленные требования для робота по персональному уходу (3.13) были выполнены. |
[ИСО 9000:2005, 3.8.4, модифицировано] |
3.12
валидация (validation): Подтверждение посредством предоставления объективных свидетельств того, что требования, предназначенные для конкретного использования и применения робота по персональному уходу (3.13), выполнены. |
[ИСО 9000:2005, 3.8.5, модифицировано] |
3.13 робот по персональному уходу (personal care robot): Сервисный робот (3.4), который выполняет действия, направленные непосредственно на улучшение качества жизни людей, исключая медицинские применения.
Примечания
1 К таким действиям относится физический контакт (3.19.1) с человеком для выполнения задания.
2 К типичным видам роботов по персональному уходу относятся: мобильный обслуживающий робот (3.14), робот для оказания физической помощи (3.15) и робот для перевозки человека (3.16).
3.14 мобильный обслуживающий робот (mobile servant robot): Робот по персональному уходу (3.13), который способен перемещаться для выполнения заданий по обслуживанию (например, перемещение объектов или обмен информацией) при взаимодействии с людьми.
3.15 робот для оказания физической помощи (physical assistant robot): Робот по персональному уходу (3.13), который физически помогает пользователю (3.26) выполнять необходимые задания, обеспечивая дополнение или увеличение его персональных возможностей.
3.15.1 робот для оказания физической помощи закрепляемого типа (restraint type physical assistant robot): Робот для оказания физической помощи (3.15), который прикреплен к человеку во время использования.
Пример - К роботам данного типа относятся носимые комплексы или немедицинские экзоскелетоны для физической помощи.
3.15.2 робот для оказания физической помощи незакрепляемого типа (restraint-free type physical assistant robot): Робот для оказания физической помощи (3.15), который не прикреплен к человеку во время использования.
Примечание - Роботы данного типа допускают свободное удержание/отпускание робота человеком для того, чтобы управлять или прекращать физическую помощь. Примерами являются устройства, увеличивающие развиваемые усилия и/или помогающие при ходьбе.
3.16 робот для перевозки человека (person carrier robot): Робот по персональному уходу (3.13), назначением которого является доставка людей в заданное место.
Примечания
1 Такой робот может иметь кабину и может быть оснащен сиденьем и/или опорой для стояния (либо чем-то подобным).
2 Помимо людей транспортировка может относиться к другим объектам, например, к животным или имуществу.
3.17 защитная остановка (protective stop): Прерывание функционирования, которое обеспечивает упорядоченное прекращение движения в целях безопасности.
3.18.1* максимальное пространство (maximum space): Пространство, в котором могут находиться подвижные элементы робота (3.2), предусмотренные изготовителем, плюс пространство, в котором могут находиться манипуляторы и полезная нагрузка.
__________________
* Нумерация соответствует оригиналу. - .
Примечания
1 Для мобильных платформ данное пространство может быть определено с помощью физических границ, в которых робот может перемещаться.
2 См. рисунок 1.
3.18.2
ограниченное пространство (restricted space): Часть максимального пространства (3.18.1) в пределах ограничивающих устройств, устанавливающих границы, которые не могут быть нарушены роботом (3.2). |
[ИСО 8373:2012, 4.8.2, модифицировано] |
3.18.3 контролируемое пространство (monitored space): Пространство, наблюдаемое сенсорами, имеющимися у робота по персональному уходу (3.13), в котором обнаружен связанный с безопасностью объект (3.21.1).
Примечания
1 Контролируемое пространство может выходить за пределы максимального пространства (3.18.1) и может быть определено совокупностью мобильных сенсоров на роботе и стационарных сенсоров, находящихся внутри и вне максимального пространства.
2 Данное пространство может быть статическим или динамическим в зависимости от робота по персональному уходу и его применения.
3 См. рисунок 1.
3.18.4 защищенное пространство (safeguarded space): Пространство, в котором робот по персональному уходу (3.13) выполняет функцию, связанную с безопасностью, если в нем обнаружен связанный с безопасностью объект (3.21.1).
Примечания
1 Примерами функций, связанных с безопасностью, являются: изменение траектории, снижение скорости, защитная остановка (3.17), ограничение усилия.
2 В приложении С приведены более подробно возможные реализации алгоритмов для снижения скорости.
3 Данное пространство может быть статическим или динамическим в зависимости от робота по персональному уходу, его применения и его (динамической) формы.
4 См. рисунок 1.
3.18.5 пространство защитной остановки (protective stop space): Пространство, в котором робот по персональному уходу (3.13) будет выполнять защитную остановку (3.17), если в ней появится связанный с безопасностью объект (3.21.1).
Пример - Примеры рабочих пространств для некоторых роботов по персональному уходу представлены в приложении В.
Примечания
1 Данное пространство может быть статическим или динамическим в зависимости от робота по персональному уходу, его применения и его (динамической) формы.
2 См. рисунок 1.
3.19.1 контакт (contact): Нулевое расстояние между роботом (3.2) и объектом в его внешней среде.
3.19.2 бесконтактное восприятие (non-contact sensing): Способность к обнаружению или измерению, для которой не требуется прикасаться к объектам (включая людей) во внешней среде.
3.19.3 контактное восприятие (contact sensing): Способность к обнаружению или измерению, для которой требуется прикасаться к объектам (включая людей) во внешней среде.
3.19.4 ненамеренный контакт (unintended contact): Незапланированное касание между роботом по персональному уходу (3.13) и объектом при выполнении поставленной задачи.
3.19.5 разрешенный контакт (allowed contact): Любое касание робота по персональному уходу (3.13), которое разрешено изготовителем.
3.20 относительная скорость (relative speed): Величина разности между векторами скорости робота (3.2) и объекта (включая человека), с которым может произойти касание.
Примечание - Скоростью робота является векторная сумма скоростей корпуса робота и его подвижных частей.
3.21.1 связанный с безопасностью объект (safety-related object): Человек, домашнее животное или имущество, которые должны быть защищены от угрозы.
Примечание - Виды домашних животных (особенно комнатных) и имущество, которые должны быть защищены, зависят от применения по назначению робота по персональному уходу.
3.21.2 связанное с безопасностью препятствие (safety-related obstacle): Объект, препятствие или состояние поверхности, которые могут вызвать угрозу, если произойдет контакт или столкновение с роботом (3.2).
3.21.3 связанный с безопасностью предел скорости (safety-related speed limit): Верхняя граница скорости, которую может достичь определенная точка (место на корпусе) робота по персональному уходу (3.13) без возникновения неприемлемого риска (3.7).
Примечание - В данном определении скорость может быть абсолютной или относительной по отношению к определенной точке.
3.21.4 связанный с безопасностью предел усилия (safety-related force limit): Верхняя граница усилия, которое определенная точка робота по персональному уходу (3.13) может прилагать к человеку или другим окружающим объектам без возникновения неприемлемого риска (3.7).
3.21.5 связанное с безопасностью состояние поверхности (safety-related surface condition): Неблагоприятные состояния поверхности перемещения для мобильного робота по персональному уходу (3.13), для которых могут быть выявлены опасности (3.6) при общей оценке риска (3.8).
Пример - Состояния поверхности, при которых робот для перевозки человека (3.16) может опрокинуться или скользить, вызывая травму или повреждение.
3.22
устройство ручного управления (manual control device): Приводимое в действие человеком устройство, соединенное с контуром управления и используемое для управления роботом по персональному уходу (3.13). |
[МЭК 60204-1:2009, 3.9, модифицировано] |
3.23 командное устройство (command device): Устройство, которое позволяет оператору (3.25) или пользователю (3.26) управлять роботом (3.2).
3.24.1
ручной режим (manual mode): Рабочий режим, при котором человек непосредственно управляет роботом (3.2) с помощью, например, кнопок или джойстика, когда автоматическое управление исключается. |
[ИСО 8373:2012, 5.3.10.2, модифицировано] |
3.24.2 автономный режим (autonomous mode): Рабочий режим, при котором робот (3.2) выполняет свою миссию без непосредственного вмешательства человека.
Пример - Мобильный обслуживающий робот (3.14), ожидающий взаимодействия (команды).
3.24.3 полуавтономный режим (semi-autonomous mode): Рабочий режим, при котором робот (3.2) выполняет свою миссию при частичном вмешательстве человека.
Пример - Робот для оказания физической помощи (3.15) пытается скорректировать выбранную человеком траекторию, чтобы избежать столкновения.
3.25
оператор (operator): Человек, назначенный для проведения изменений параметров и программ, а также запуска, контроля и остановки заданной операции робота по персональному уходу (3.13). |
[ИСО 8373, 2.17, модифицировано] |
3.26 пользователь (user): Оператор (3.25) робота по персональному уходу (3.13) или получатель услуги, предоставляемой роботом по персональному уходу.
Примечание - В некоторых случаях пользователь может быть как оператором, так и получателем услуги.
3.27 программно заданные границы (software limits): Ограничения на один или несколько рабочих параметров робота (3.2), заданные в системе управления.
Примечание - Программно заданная граница может ограничивать рабочие зоны, скорость, усилия и т.д.
3.28
сингулярность (особая точка) (singularity): Случай, когда ранг матрицы Якоби становится меньше, чем полный ранг. |
[ИСО 10218-1:2011, 3.22, модифицировано] |
3.29
защитная электрочувствительная аппаратура (electro-sensitive protective equipment, ESPE): Совокупность устройств и/или компонентов, работающих совместно с целью защитного отключения или распознавания присутствия, состоящая как минимум из: |
[МЭК 61496-1:2004, 3.5, модифицировано] |
3.30 защитная чувствительная к давлению аппаратура (pressure-sensitive protective equipment, PSPE): Совокупность устройств и компонентов, срабатывающих с использованием метода "механически активированного отключения" для обеспечения защиты при возникновении опасных ситуаций.
Примечания
1 Примерами PSPE являются чувствительные к давлению коврики и полы, бамперы, чувствительные к давлению ребра и стержни.
2 PSPE выдает сигнал остановки, используя разные способы, например, механические контакты, волоконно-оптические датчики, пневматические датчики.
3 Коммуникационный интерфейс, связанный с безопасностью, может быть интегрирован в тот же корпус, что и ESPE.
3.31 чувствительное к давлению предохранительное оборудование (pressure-sensitive protective eguipment, PSPE): Совокупность устройств и компонентов, срабатывающих с использованием метода "механически активированного отключения" для обеспечения защиты при возникновении опасных ситуаций.
Примечания
1 Примерами PSPE являются чувствительные к давлению коврики и полы, бамперы, чувствительные к давлению ребра и стержни.
2 PSPE выдает сигнал остановки, используя разные способы, например, механические контакты, волоконно-оптические датчики, пневматические датчики.
4 Общая оценка рисков
4.1 Общие положения
Для выполнения общей оценки рисков применяются все требования, установленные в ИСО 12100. ИСО 12100 обеспечивает требования и руководства для выполнения общей оценки рисков, включая анализ рисков, основанный на идентификации опасности. При выполнении общей оценки рисков решение о том, является риск приемлемым или нет, зависит от области применения и предполагаемого использования робота по персональному уходу.
ИСО 12100 содержит общие перечни опасностей для машин и механизмов, на основании которых создан список опасностей для роботов по персональному уходу, представленный в приложении А.
4.2 Идентификация опасности
Идентификация опасности должна осуществляться для того, чтобы выявить любые опасности, которые могут возникнуть для конкретного робота по персональному уходу. Приложение А содержит список типичных опасностей, которые могут возникнуть для роботов по персональному уходу, описанных в настоящем стандарте. Данный список не должен рассматриваться как исчерпывающий, так как конкретные системы с роботами по персональному уходу могут также подвергаться другим опасностям из-за их конкретной конструкции, предполагаемого использования или разумно предсказуемого неправильного использования. Применение процесса оценивания опасности должно выполняться для каждой конструкции и должно обращать особое внимание на:
a) неопределенность автономных решений, принятых роботом, и возможные опасности из-за неправильных решений;
b) разные уровни знаний, опыта и физического состояния пользователей и других подвергающихся риску людей;
c) нормальные, но неожиданные движения робота по персональному уходу;
d) неожиданные движения (например, прыжок перед роботом по персональному уходу сбоку или сверху) людей, домашних животных и других объектов, связанных с безопасностью;
e) непредусмотренное движение робота по персональному уходу;
f) неожиданные поверхности передвижения и условия внешней среды в случае мобильных роботов;
g) неопределенность объектов, связанных с безопасностью, с которыми надо работать, в случае мобильных обслуживающих роботов;
h) совместимость с анатомией человека и ее изменчивости в случае роботов для оказания физической помощи и роботов для перевозки человека.
Там, где это необходимо, при общей оценке рисков должны рассматриваться, в частности, манипуляторы и рабочие органы робота по персональному уходу, которые должны соответствовать таким же требованиям, как и роботы.
4.3 Оценка риска
Оценка риска должна быть выполнена для опасностей, определенных в 4.2, с обращением особого внимания на разные ситуации, в которых робот по персональному уходу может контактировать с объектами, связанными с безопасностью.
После того как все меры по безопасности конструкции и защите приняты, должен быть оценен остаточный риск робота по персональному уходу и должно быть обосновано, что этот риск снижен до приемлемого уровня.
Должны быть разработаны подходящие методы оценки риска на основе рассмотрения каждого случая в отдельности. Результаты оценки должны быть представлены, чтобы показать, что данное событие (например, допустимый контакт между роботом и препятствиями или другими объектами, связанными с безопасностью) не вызовет какого-либо неприемлемого риска. Если для конкретных применений используются численные значения оценки риска, то должно быть обеспечено соответствующее подтверждение соответствия методологии тестирования/измерения. Если для оценки риска используются численные оценки из других источников, то должно быть обосновано, что ссылка на них правомерна.
Примечания
1 Были проведены исследования взаимодействия и столкновений между человеком и роботом на предмет границ болевых ощущений взрослых людей, а также соударений с разными частями тела человека с целью исследования механизмов нанесения существенных травм (см. библиографию).
2 Более полные численные данные для разных категорий людей (например, детей, престарелых людей, беременных женщин) и областей применения роботов по персональному уходу (например, мобильный обслуживающий робот, робот для оказания физической помощи, робот для перевозки человека) определяются в настоящее время и будут включены в будущее издание настоящего стандарта. Некоторая работа в этом направлении началась для промышленных роботов. Ее результаты будут опубликованы как ИСО/ТС 15066, чтобы помочь в разработке рабочих мест для совместной работы с роботами.
5 Требования по безопасности и меры защиты
5.1 Общие положения
Роботы по персональному уходу должны соответствовать требованиям по безопасности, изложенным в данном разделе. Если опасности, связанные с применением роботов по персональному уходу, идентифицированы с использованием методов, описанных в разделе 4, то робот должен быть сконструирован так, чтобы обеспечить нахождение риска для этих опасностей ниже допустимого уровня. Кроме того, робот должен быть сконструирован в соответствии с принципами, изложенными в ИСО 12100:2010, для возможных, но незначительных опасностей, которые не рассмотрены в данном документе.
Если риск может быть устранен или снижен с помощью мер, не описанных в настоящем стандарте, то должны применяться другие требования, определенные при общей оценке риска. Эти меры должны обеспечивать по крайней мере такой же уровень снижения риска, как и меры, описанные в настоящем стандарте.
Должны быть предприняты меры по защите любого подвергающегося воздействию человека и в случае необходимости любого домашнего животного или объекта, связанного с безопасностью, вблизи робота по персональному уходу от любых опасностей, а также по обеспечению безопасности пользователя при продолжительном использовании робота, насколько это реально осуществимо.
Для роботов по персональному уходу могут потребоваться дополнительные стандарты и правила, например, правила дорожного движения, если робот для перевозки человека работает на общественных трассах.
Робот по персональному уходу должен быть сконструирован в соответствии с принципами, изложенными в ИСО 12100, для всех опасностей, идентифицированных для его применения, включая следующие:
a) конструкция, обеспечивающая безопасность;
b) меры защиты;
c) информация по использованию.
Примечание - Для применения настоящего стандарта необходим ИСО 12100. Желательно, чтобы пользователи ознакомились с ИСО 12100 до того, как они будут применять или использовать настоящий стандарт.
Использование мер по проектированию конструкции, обеспечивающей безопасность, является первым и наиболее важным шагом в процессе снижения рисков, так как такие присущие характеристики робота по персональному уходу, вероятно, останутся действенными, тогда как опыт показывает, что даже хорошо спроектированные меры защиты могут дать сбой или быть нарушены, а информации по использованию может не оказаться.
Меры по созданию конструкции, обеспечивающей безопасность, позволяют избежать опасностей с помощью снижения или устранения рисков благодаря подходящему выбору особенностей конструкции самого робота по персональному уходу и/или взаимодействия между задействованными людьми и роботом. Требования по мерам проектирования, обеспечивающего безопасность конструкции, представлены в 5.х.2 или 5.х.х.2 соответствующих подразделов 5.x или 5.х.х.
Применение предохранительных устройств и/или мер защиты является вторым шагом метода снижения риска. Поскольку большое число рисков возникает вследствие возможных динамических взаимодействий между препятствиями, влияющими на безопасность, и роботом по персональному уходу, то функция управления защитой робота может значительно снизить конкретный вид риска. Требования к мерам защиты представлены в 5.х.3 или 5.х.х.3 соответствующих подразделов 5.x или 5.х.х.
Когда снижение риска достигается с помощью использования функций управления, связанных с безопасностью, применяются требования из раздела 6.
Информация об остаточных рисках после применения проектирования, обеспечивающего безопасность конструкции, и мер защиты должна быть отражена в справочном руководстве. Конкретные требования, касающиеся информации по использованию для каждой опасности, рассмотрены в 5.х.4 или 5.х.х.4 соответствующих подразделов 5.x или 5.х.х, а общие требования, касающиеся информации по использованию, представлены в разделе 8.
Соответствие требованиям безопасности, установленным в настоящем разделе, может быть проверено с помощью одного или нескольких методов, таких как:
- А: осмотр;
- В: тесты образца изделия;
- С: измерение;
- D: наблюдение во время работы;
- Е: диагностика коммутационных схем;
- F: проверка программного обеспечения;
- G: анализ общей оценки риска на основе задач;
- Н: проверка компоновочных чертежей и сопутствующих документов.
Рекомендуемые методы верификации и валидации различных требований для существенных опасностей представлены в 5.х.5 или 5.х.х.5 соответствующих подразделов 5.x или 5.х.х в форме обозначений (А, В и т.д.), соответствующих перечисленным выше методам. Описание методов верификации и валидации представлено в разделе 7.
5.2 Опасности, связанные с зарядкой аккумуляторов
5.2.1 Общие положения
Если робот по персональному уходу имеет интегрированную и встроенную систему зарядки аккумуляторов, то люди должны быть защищены от опасностей, связанных со случайным контактом с зарядными клеммами на роботе и его системами зарядки, которые должны соответствовать МЭК 60204-1 или МЭК 60335-2-29, в зависимости от того, который из них подходит для данного случая, а также должны соответствовать МЭК 60529 и ЕН 50272.
Кроме того, система зарядки должна предотвращать любые опасности, возникающие вследствие перегрузки или зарядки сильно разряженных аккумуляторов.
5.2.2 Конструкция, обеспечивающая безопасность
Зарядные клеммы и разъемы должны быть спроектированы так, чтобы не допустить случайного касания токоведущих частей (например, крышки для разъемов и розеток).
Напряжение между зарядными клеммами должно соответствовать стандарту, относящемуся к данной области применения и/или окружающей среды систем зарядки, такому как МЭК 60204-1, МЭК 61140, МЭК 60335-2-29 и МЭК 61851.
Токи зарядки аккумуляторов должны быть выбраны настолько низкими, насколько это практически осуществимо.
5.2.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) Системы зарядки должны быть спроектированы так, чтобы зарядные контакты приводились в действие только тогда, когда робот по персональному уходу подключен к ним;
b) Системы зарядки должны отображать состояние зарядки или выдавать сигнал, когда аккумулятор полностью заряжен;
c) Системы зарядки должны быть спроектированы так, чтобы правильная зарядка аккумулятора автоматически контролировалась, и таким образом предотвращали опасности, вызываемые перегрузкой или зарядкой полностью разряженных аккумуляторов.
5.2.4 Информация по использованию
Информация по использованию должна содержать инструкции по зарядке аккумулятора, в частности:
- процедуру зарядки для робота по персональному уходу;
- условия окружающей среды (например, зарядка на открытом воздухе или в закрытом помещении);
- требование по выключению робота по персональному уходу или перевод его в некоторый функциональный режим;
- необходимые предупреждения.
5.2.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, D, Е.
5.3 Опасности, связанные с накоплением и подачей энергии
5.3.1 Контакт с опасными силовыми элементами
5.3.1.1 Общие положения
Робот по персональному уходу должен быть спроектирован и построен так, чтобы предотвратить все опасности, связанные с его энергетикой.
Электрическое оборудование робота по персональному уходу должно быть спроектировано и построено в соответствии с требованиями МЭК 60204-1 для электрического оборудования, ИСО 4414 для пневматического оборудования и ИСО 4413 для гидравлического оборудования.
Все подверженные воздействию люди должны быть защищены от прямого и непрямого контакта с токоведущими частями робота.
Должны быть обеспечены средства для изоляции любых опасных источников энергии (электрической, механической, гидравлической, пневматической, химической и термальной). Опасные источники энергии должны быть четко обозначены, а изоляция должна быть способна блокировать источник, если его отсоединение влечет за собой опасность.
5.3.1.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) использование безопасных источников сверхнизкого напряжения для электрического оборудования в соответствии с МЭК 61140 (менее 25 В переменного тока и 60 В постоянного тока);
b) использование низкого давления для пневматического и гидравлического оборудования.
Другие виды накопленной энергии должны быть на возможно низком уровне, чтобы минимизировать опасность.
5.3.1.3 Основные и дополнительные меры защиты
При использовании предохранительных приспособлений и кожухов для защиты от опасных силовых частей их конструкция должна подчиняться правилам соответствующего класса IP, определенного в МЭК 60529 для опасностей, связанных с поражением электрическим током, и безопасного расстояния по ИСО 13857 для других опасностей, выявленных при оценивании рисков.
Там, где присутствует избыточное тепло, должны быть применены меры по отводу тепла (например, радиаторы, воздушные потоки). При применении вентиляторов рекомендуется использовать устройства управления вентиляцией.
5.3.1.4 Информация по использованию
Предупреждающая маркировка должна быть нанесена на робота по персональному уходу в соответствии с ИСО 7010, а ее значение должно быть пояснено в информации по использованию.
5.3.1.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: А, В, С, Е, Н.
5.3.2 Неконтролируемое высвобождение накопленной энергии
5.3.2.1 Общие положения
Неконтролируемое высвобождение накопленной энергии не должно вызывать опасности. Это относится и к функционированию робота, и к тому периоду, когда он выключен.
Должны быть предусмотрены средства для контролируемого высвобождения или устранения накопленной опасной энергии. Контролируемое высвобождение или устранение накопленной энергии не должно приводить к каким-либо дополнительным опасностям.
Примечание - Энергия может накапливаться в пневматических или гидравлических аккумуляторах давления, конденсаторах, аккумуляторах, пружинах, противовесах, маховиках и т.д.
5.3.2.2 Конструкция, обеспечивающая безопасность
Накопленная энергия должна поддерживаться на возможно низком уровне.
5.3.2.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) должны быть применены защитные приспособления/кожухи, чтобы минимизировать риск при высвобождении энергии;
b) робот должен быть снабжен средствами для регулировки подачи питания так, чтобы предотвратить перегрев или перегрузки по току, вызванные перегрузками, коротким замыканием, кожухами, заключающими в себе источник нагрева робота, или неправильным срабатыванием устройств.
5.3.2.4 Информация по использованию
Должны быть поставлены метки для идентификации всех опасных запасов энергии и их местоположения. Информация по использованию должна содержать их описание и процедуры по устранению или контролируемому высвобождению накопленной энергии.
5.3.2.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, Е, Н.
5.3.3 Сбои и отключения питания
5.3.3.1 Общие положения
Сбой или ненамеренное отключение питания робота по персональному уходу и последующее повторное включение питания не должны приводить к неприемлемому риску. Особое внимание должно быть уделено следующим обстоятельствам.
a) Роботы по персональному уходу, оснащенные манипуляторами, должны быть спроектированы так, чтобы риски из-за перемещения манипулятора или падения грузов в случае сбоя или отключения питания манипулятора были приемлемыми. Это должно быть обеспечено независимо от типа (типов) источника питания (например, электрического, гидравлического, пневматического, вакуумного).
b) Роботы по персональному уходу, оснащенные мобильными платформами, должны быть спроектированы так, чтобы риски из-за перемещения робота в случае сбоя или отключения питания (например, выход из-под контроля) были приемлемыми. Это должно быть обеспечено независимо от механизмов перемещения робота (например, колеса, гусеницы, ноги).
c) Роботы по персональному уходу, способные временно отключать приведение в действие выключение питания, должны быть спроектированы так, чтобы риски из-за падения частей или компонентов робота в случае потери или изменения питания были приемлемыми.
d) В соответствующих случаях, если часть робота по персональному уходу представляет опасность захватывания, должны быть обеспечены средства для перемещения этой части без питания приводов одним человеком. При этом необходимо принять во внимание всех потенциальных пользователей, чтобы обеспечить их избавление или высвобождение в соответствии с определением при общей оценки рисков.
Примечание - В МЭК 60204-1 содержатся требования для электрических источников питания.
5.3.3.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) использование принципа "срабатывает при отключении питания" при проектировании тормозных механизмов всех подвижных частей;
b) внутреннее накопление достаточной энергии, чтобы обеспечить перевод в безопасное состояние при сбое или отключении питания.
Чтобы избежать неожиданного запуска, должны выполняться требования ИСО 14118.
5.3.3.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) должны быть созданы средства для обеспечения бесперебойного источника питания;
b) роботы по персональному уходу, способные удерживать людей в изолированных местах, должны быть снабжены средствами для вызова помощи, имеющими независимое питание;
c) в случае, если доступная внутренняя энергия или накопленная мощность (например, мощность аккумулятора) падает ниже некоторого порога, то робот должен уведомить о своем состоянии пользователя и/или оператора с помощью звука, света или вибрации и автоматически перейти в безопасное состояние, если мощность аккумулятора достигнет опасного уровня.
5.3.3.4 Информация по использованию
Информация по использованию должна описывать остаточные риски, связанные со сбоем или отключением питания. После таких сбоев или отключений питания могут потребоваться процедуры по техническому обслуживанию, если при общей оценке рисков это признано необходимым (см. 8.4).
5.3.3.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, Е, Н.
5.4 Начало и возобновление обычной работы робота
5.4.1 Общие положения
Роботы по персональному уходу не должны выполнять никаких опасных действий сразу после запуска.
5.4.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры.
a) Во время запуска робот по персональному уходу должен выполнить внутренние контрольные тесты, чтобы убедиться, что все функции, связанные с обеспечением безопасности, работоспособны. Это позволит избежать каких-либо опасных действий.
b) Если функции по обеспечению безопасности робота по персональному уходу не могут быть правильно выполнены после запуска, то робот должен быть немедленно остановлен.
c) Робот по персональному уходу всегда должен запускаться в состоянии ограниченных скоростей, усилий и т.п. (см. 6.4 и 6.7). Переходить к нормальному уровню управления робот должен с помощью изменения режима работы (см. 6.11).
d) Робот по персональному уходу всегда должен запускаться в режиме ручного управления и переходить к работе в автономном режиме только с помощью изменения режима работы, как определено в 6.11.1.
Если тестирование некоторых связанных с обеспечением безопасности компонентов требует перемещения робота, то допускается минимальное перемещение, необходимое для установления отсутствия сбоев у компонентов, связанных с безопасностью. Риски, связанные с данным перемещением, должны быть как можно меньшими.
5.4.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры.
а) Манипуляторы, мобильные платформы и другие подвижные части при запуске должны быть выключены функциями, связанными с обеспечением безопасности (чтобы предотвратить какие-либо ненамеренные действия). Выполнение прикладных функций должно быть разрешено только тогда, когда с помощью сенсоров будет установлено, что не существует никакой опасной ситуации. Эта мера должна быть применена в том случае, если робот предназначен для перехода в автономный режим работы непосредственно после запуска.
b) Робот по персональному уходу всегда должен запускаться в состоянии контролируемого бездействия и переходить к нормальной работе только в результате соответствующих действий пользователя.
5.4.4 Информация по использованию
Необходимые инструкции по запуску и перезапуску, соответствующие предпринятым мерам, должны быть приведены в информации по использованию робота.
5.4.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, F.
5.5 Электростатический потенциал
5.5.1 Общие положения
Робот по персональному уходу должен быть спроектирован так, чтобы избежать любого вреда для человека и домашних животных, вызванного электростатическим потенциалом и разрядом.
Защита от электростатического разряда (ESD) должна быть достаточной, чтобы никаких персональных защитных средств не требовалось для пользователей.
Любое накопление опасного электростатического потенциала должно быть разряжено.
Робот по персональному уходу должен быть спроектирован так, чтобы избежать опасного неправильного срабатывания из-за разряда электростатического потенциала.
Примечание - Дополнительное руководство приведено в МЭК 61000-4-2 (см. также 5.6).
5.5.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) использование токопроводящих материалов;
b) разряд внешних поверхностей с помощью заземления;
c) другие приемы для предотвращения накапливания электростатического заряда на поверхностях или частях, доступных для прикасания.
5.5.3 Основные и дополнительные меры защиты
Использование крышек для электрического оборудования должно соответствовать МЭК 60204-1, чтобы предотвратить контакт с токоведущими частями.
5.5.4 Информация по использованию
Необходимые предупреждающие знаки для ESD из ИСО 7010 должны быть приведены в информации по использованию робота.
5.5.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, Е.
Примечание - В МЭК 61000-4-2 и ИСО 7176-21 содержатся подходящие методы тестирования.
5.6 Опасности, связанные с формой робота
5.6.1 Общие положения
Сценарии использования по назначению для выполнения намеченных задач роботом по персональному уходу должны рассматриваться при проектировании общего вида робота и его внешних частей, чтобы избежать возможных несчастных случаев, приводящих, например, к защемлению, порезам или серьезным травмам.
При общей оценке рисков также необходимо рассмотреть форму груза, переносимого роботом по персональному уходу.
Пример - Ремни экзоскелетона должны быть спроектированы так, чтобы не приводить к травмам, например, порезам или ссадинам.
5.6.2 Конструкция, обеспечивающая безопасность
При проектировании робота по персональному уходу необходимо избегать острых кромок и концов в соответствии с ИСО 12100.
Отверстия или щели на доступных частях робота должны быть спроектированы так, чтобы в них не могла попасть никакая часть тела человека в соответствии с ИСО 13584 и ИСО 15534.
Суставы робота (например, суставы манипулятора) должны быть спроектированы так, чтобы части тела человека не могли повредиться при правильном движении сустава. Это может быть достигнуто за счет выбора геометрии робота, а также ограничения диапазона перемещения сустава.
Переносимые грузы не должны быть острыми или колкими.
5.6.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) должно быть обеспечено демпфирование на острых ребрах и концах, чтобы устранить опасности среза, прокалывания, пореза и снизить опасности от удара (см. 4.3, примечание 2);
b) использование фиксированных или подвижных предохранительных приспособлений, чтобы закрыть подвижные части;
c) коррекция скорости и поведения робота при переносе опасных грузов (например, острых или колющихся объектов).
5.6.4 Информация по использованию
Предупреждения и инструкции, обеспечивающие снижение рисков, связанных с формой, должны соответствовать ИСО 12100 и ИСО 7010.
Информация по использованию должна содержать инструкции по защитному оборудованию (например, перчаткам), необходимому для обслуживания, использования или функционирования робота по персональному уходу.
Если форма переносимого груза может привести к дополнительным опасностям, то должны быть приведены необходимые инструкции, касающиеся данных рисков.
5.6.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: А, С, G, Н.
5.7 Опасности, связанные с излучениями
5.7.1 Опасный шум
5.7.1.1 Общие положения
Любой человек, находящийся вблизи робота по персональному уходу, должен быть защищен от шума (включая ультразвуковой шум), который может непосредственно вызвать дискомфорт, стресс, потерю слуха, потерю равновесия или сознания пользователя, либо подобные расстройства могут возникнуть из-за работы робота.
Уровень акустического шума, излучаемого роботом по персональному уходу, должен быть достаточно низким, чтобы не было необходимости применять какие-либо специальные защитные средства.
Робот по персональному уходу должен соответствовать стандартам по излучению шума, соответствующим его намеченному использованию (например, см. ИСО 1996, ИСО 3740, ИСО 11200, ИСО/ТС 15666, ИСО 15667).
Примечание - Оценка акустического шума окружающей среды может быть определена по ИСО 1996-1 и ИСО 1996-2.
5.7.1.2 Конструкция, обеспечивающая безопасность
В ИСО/ТО 11688-1 приведены общая техническая информация и руководство по конструированию малошумящих машин. Особое внимание следует уделить акустической конструкции робота. В соответствующих случаях должны быть применены следующие меры:
a) малошумящие компоненты: робот по персональному уходу должен быть построен из компонентов, которым свойственно быть тихими при работе;
b) правильное функционирование: действия и/или движения робота при выполнении поставленных заданий должны быть спроектированы так, чтобы не издавать шума;
c) звукопоглощающие материалы: робот по персональному уходу должен быть изготовлен из материалов, которые ограничивают акустический шум и снижают его излучение во внешнюю среду.
Примечание - В ИСО/ТО 11688-2 приведена полезная информация по причинам генерации шума машинами и механизмами.
5.7.1.3 Основные и дополнительные меры защиты
Должна быть применена по крайней мере одна из следующих мер:
a) дополнительные звукопоглощающие материалы, например, пеноматериалы, глушители, шторки, специальные покрытия;
b) использование активных механизмов, устраняющих шум (антишумовых механизмов).
5.7.1.4 Информация по использованию
Информация по использованию должна описывать оберегающие и меры защиты, используемые для снижения уровня шума, и должна содержать соответствующие инструкции по обслуживанию. В случае необходимости должны быть приведены инструкции по регулярным проверкам излучаемого шума.
5.7.1.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: С, D.
Должно быть сделано двухчисловое объявление в соответствии с ИСО 4871, а измерение, объявление и верификация значений шумового излучения должны быть сделаны в соответствии с ИСО 3746 или ИСО 11202.
5.7.2 Опасные вибрации
5.7.2.1 Общие положения
Пользователи робота по персональному уходу должны быть защищены от вредных прямых или непрямых вибраций, исходящих от используемого робота, так, чтобы их физическое состояние было защищено во время работы робота.
a) Пользователь робота по персональному уходу должен быть защищен от вредных вибраций, которые могут вызвать травмы, связанные с вибрацией, например, воспаление сухожилий, боли в спине, дискомфорт, невроз, артрит или подобные нарушения любого вида из-за постоянного использования робота.
b) Пользователь робота по персональному уходу должен быть защищен от вибраций в диапазоне от 0,5 до 80 Гц, которые могут вызвать проблемы со здоровьем, комфортом и восприятием, и вибраций в диапазоне от 0,1 до 0,5 Гц, которые могут вызвать морскую болезнь. Конструкция робота по персональному уходу должна соответствовать всем частям ИСО 2631.
Уровень вибрации от робота по персональному уходу должен быть достаточно низким, чтобы не требовались специальные защитные средства.
5.7.2.2 Конструкция, обеспечивающая безопасность
В конструкции могут быть применены (но не ограничены ими) следующие меры:
a) минимизация вибрации, производимой механическими компонентами конструкции робота по персональному уходу, например, снижение нецентрированного распределения масс или ограничение скорости подвижных частей;
b) выбор и использование в конструкции материалов, демпфирующих вибрацию, чтобы ограничить степень воздействия на людей источников вибрации в роботе по персональному уходу.
5.7.2.3 Основные и дополнительные меры защиты
Должна быть применена по крайней мере одна из следующих мер:
a) применение активного управления вибрацией, например, с помощью приспосабливающихся демпфирующих механизмов или управляемого демпфирования;
b) ограничение движения робота по персональному уходу до скоростей, которые не будут вызывать вибрацию или сделают ее минимальной.
5.7.2.4 Информация по использованию
Информация по использованию должна содержать подробное описание вибрирующих компонентов.
5.7.2.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: С, D.
5.7.3 Опасные вещества и жидкости
5.7.3.1 Общие положения
Пользователь робота по персональному уходу должен быть защищен от выбросов любых токсичных или вредных материалов, а также от сольвентов, присутствующих на поверхности корпуса робота или даже находящихся внутри него, если сольвент является летучим, которые могут вызвать ожоги или любой вид раздражения (например, см. ИСО 14123-1).
Робот по персональному уходу должен быть спроектирован так, чтобы не выбрасывать никаких опасных веществ и жидкостей. Робот должен быть спроектирован так, чтобы во время обычной работы пользователю не требовалось никаких защитных приспособлений.
Никакие материалы, которые могут вызвать аллергию, не должны использоваться на поверхностях, контактирующих с кожей человека во время обычного использования робота по персональному уходу.
Примечание - Никель, хром и некоторые виды резины могут вызвать аллергические реакции.
5.7.3.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) исключение или предотвращение выбросов потенциально опасных веществ и жидкостей, например, масла, охлаждающей жидкости и пыли от истирания тормозов робота по персональному уходу;
b) замена потенциально опасных веществ и жидкостей, например масла, охлаждающей жидкости и материала тормозов, менее вредными или неопасными;
c) проектирование робота по персональному уходу так, чтобы вредные вещества находились внутри него, а не выбрасывались в окружающую среду.
5.7.3.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) меры по выявлению утечки опасных веществ и жидкостей (например, масла), если опасные вещества или жидкости необходимы для работы робота;
b) применение отсечных клапанов или пробок для устранения протечек в трубопроводах для жидкостей;
c) меры по предотвращению возможности контакта с человеком в случае протечки (например, чехлы).
5.7.3.4 Информация по использованию
Информация по использованию должна содержать информацию о любых опасных веществах внутри робота по персональному уходу. В случае необходимости должны быть представлены инструкции по предосторожностям при использовании, переносе, обслуживании и разборке робота.
В случае использования аллергенных материалов должна быть представлена информация об этих материалах.
5.7.3.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: Е, G, Н.
5.7.4 Экстремальные температуры
5.7.4.1 Общие положения
Пользователь робота по персональному уходу должен быть защищен от экстремальных температур (высоких или низких) на роботе и его компонентах, которые могут вызвать ожоги, отморожения, стресс, дискомфорт или подобные расстройства любого вида. Чтобы удовлетворять данному требованию, робот должен соответствовать ИСО 13732.
Примечание - Температуры поверхности в диапазоне от 10 до 43°С обычно не считаются экстремальными.
5.7.4.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) исключение или избегание источников экстремального тепла в роботе по персональному уходу;
b) выбор материалов и их текстуры с соответствующими теплопроводностями.
5.7.4.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) уменьшение (или увеличение) температуры поверхности с помощью подходящей охлаждающей (или нагревающей) системы;
b) изолирование или применение ограждений (см. ИСО 13732).
5.7.4.4 Информация по использованию
Информация по использованию должна содержать предупреждения и маркировки о горячих/холодных частях, имеющих экстремальные температуры, в соответствии с ИСО 3864-1. В случае необходимости должны быть представлены инструкции о предосторожности при использовании, переносе, обслуживании и разборке робота по персональному уходу.
5.7.4.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: С, D.
5.7.5 Опасное неионизирующее излучение
5.7.5.1 Общие положения
Излучения опасного света лазера и других источников электромагнитных волн должны быть предотвращены. Источники света, отличные от лазеров, должны быть спроектированы так, чтобы не превышать предел воздействия на пользователей в соответствии с МЭК 62471.
Использование лазеров должно соответствовать МЭК 60825-1, и должны использоваться лазеры самого низкого класса, необходимого для данного применения.
5.7.5.2 Неотъемлемо безопасная конструкция
Используемое лазерное оборудование должно быть не выше класса 1 по МЭК 60825-1.
5.7.5.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) защитные шторки;
b) блокировочные подвижные ограждения;
c) управление направлением лазерных лучей, например, избегать направлений, где могут находиться глаза, в соответствии с требованиями в 6.1;
d) управление мощностью лазера (например, длительностью импульсов, интенсивностью) в соответствии с 6.1;
e) для лазеров класса 2 и выше должны быть применены меры защиты по МЭК 60825-1.
5.7.5.4 Информация по использованию
Информация по использованию должна содержать подробную информацию о потенциально опасных излучениях, с которыми может столкнуться человек и в соответствующих случаях домашние животные или имущество во внешней среде робота по персональному уходу. Информация по использованию должна содержать рекомендации не смотреть прямо на источник света и предоставлять информацию по персональным защитным средствам и другим особенностям поведения. Кроме того, в информации по использованию должны быть представлены маркировки, нанесенные на роботе, и описано их значение.
5.7.5.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: С, D, G.
5.7.6 Опасное ионизирующее излучение
Пользователи роботов по персональному уходу и третьи стороны должны быть защищены от ионизирующего излучения, излучаемого роботом или его компонентами. Воздействие такого излучения должно быть минимизировано, чтобы избежать любых вредных физических воздействий или нарушений.
Как правило, механизмы, создающие ионизирующие излучения, не должны использоваться на роботах по персональному уходу. Если данный механизм необходим для конкретного применения робота (то есть в том случае, если нет другого альтернативного метода достижения целей данного применения), то должны быть разработаны специальные требования по защите. Специальные меры обеспечения безопасности должны быть разработаны в соответствии с подходящими стандартами (например, ИСО 2919, ИСО 3925 и ИСО 14152).
5.8 Опасности, связанные с электромагнитными помехами
5.8.1 Общие положения
Для всех реально предсказуемых электромагнитных возмущений опасные движения робота и небезопасные состояния системы должны быть предотвращены.
Робот по персональному уходу должен соответствовать всем стандартам по ЕМС (например, МЭК 61000-1, МЭК 61000-6-2, МЭК 61000-6-3, МЭК 61000-6-4 и МЭК 60204-1).
Примечание - Кроме того, МЭК/ТС 61000-1-2 может быть полезен в части методологии для достижения функциональной безопасности электрических и электронных систем, включая оборудование, относящееся к электромагнитным явлениям.
5.8.2 Конструкция, обеспечивающая безопасность
Должны быть разработаны функции системы управления, описанные в 6.1, чтобы соответствовать требованиям электромагнитной устойчивости МЭК 62061:2012, 6.4.3.
Другая функция (или функции) робота по персональному уходу должна соответствовать МЭК 61000-6-1 или МЭК 61000-6-2 в зависимости от намеченной среды функционирования.
5.8.3 Основные и дополнительные меры защиты
Риск должен быть снижен до приемлемого уровня с помощью электромагнитного экранирования от приходящего излучения.
5.8.4 Информация по использованию
Информация по использованию должна содержать необходимую информацию о свойствах излучаемых электромагнитных волн, а также о свойствах электромагнитных волн, которые потенциально могут вызвать помехи.
5.8.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, D.
5.9 Опасности, связанные со стрессом, положением и использованием
5.9.1 Общие положения
Опасности могут возникать как от физических, так и от психологических аспектов использования робота по персональному уходу. Помимо снижения индивидуальных воздействий, описанных в 5.7.2 и 5.7.3, комбинированные воздействия также должны быть рассмотрены при оценивании рисков.
5.9.2 Физический стресс и опасности положения
5.9.2.1 Общие положения
Общая оценка рисков должна идентифицировать опасности, связанные с физическим стрессом и положением, а конструкция робота по персональному уходу должна обеспечивать минимизацию любого такого риска. Это может быть достигнуто с помощью следующих требований, но не ограничиваясь ими:
a) робот по персональному уходу должен быть спроектирован так, чтобы минимизировать или снизить физический стресс или напряжение пользователя из-за непрерывного использования, включая, но не ограничиваясь, неудобное положение, рабочую среду, которая может непосредственно вызывать физический дискомфорт, например, усталость и воспаление суставов;
b) конструкция робота по персональному уходу должна учитывать типичные размеры тела намеченной группы пользователей для того, чтобы избежать положений тела, требующих физических усилий, или обеспечить легкость работы. ИСО 14738 описывает, как должны применяться эргономические факторы при создании рабочих станций и механизмов. Данные принципы должны быть рассмотрены при построении робота по персональному уходу, когда кто-либо сидит или стоит перед роботом.
5.9.2.2 Конструкция, обеспечивающая безопасность
Безопасная конструкция может включать, но не ограничиваться, следующие меры:
a) конструкция и размещение устройств ручного управления, которые должны обеспечивать работу с ними без физического стресса или дискомфорта;
b) надлежащий эргономический дизайн и размещение сиденья, которые должны обеспечивать возможность поддержания удобного положения во время работы робота по персональному уходу;
c) отсоединяемые и носимые в руках командные устройства вместо того, чтобы делать их постоянно присоединенными к роботу по персональному уходу в неудобном положении.
5.9.2.3 Основные и дополнительные меры защиты
Меры защиты могут включать, но не ограничиваться, следующие меры:
a) использование амортизирующих (подвешивающих) механизмов;
b) использование механизмов, поддерживающих позу пользователя.
5.9.2.4 Информация по использованию
Информация по использованию должна содержать инструкции по правильному способу работы с устройствами ручного управления и использованию робота по персональному уходу. Информация по использованию должна предусматривать необходимость надлежащего обучения, чтобы избежать того, что время перемещения оператора будет дольше рекомендованного.
5.9.2.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: А, С, D, Н.
5.9.3 Психологический стресс и опасности использования
5.9.3.1 Общие положения
Общая оценка рисков должна идентифицировать опасности, связанные с психологическим стрессом и положением, а конструкция робота по персональному уходу должна обеспечивать минимизацию любого такого риска. Это может быть достигнуто с помощью следующих требований, но не ограничиваясь ими:
a) робот по персональному уходу должен быть спроектирован так, чтобы минимизировать или снизить психологический стресс пользователя из-за непрерывного использования;
b) пользовательские интерфейсы, такие как элементы отображения управляющих команд, сигналов или данных, должны быть спроектированы так, чтобы они были легко понимаемыми, обеспечивая четкое и однозначное взаимодействие между человеком и роботом по персональному уходу;
b)* робот по персональному уходу должен соответствовать эргономическим стандартам, относящимся к его применению по назначению (см. ИСО/ТО 9241-100, ИСО 9241-210, ИСО 9241-400, ИСО 9241-920 и ИСО 11228).
_______________
* Нумерация соответствует оригиналу. - .
5.9.3.2 Конструкция, обеспечивающая безопасность
Безопасная конструкция может включать, но не ограничиваться, следующие меры:
а) обеспечение адекватного освещения;
b) конструкция робота по персональному уходу, позволяющая избежать необходимости постоянного внимания для того, чтобы легко опознавать критические сигналы, насколько это практически возможно или спустя длительные периоды времени;
c) адекватный дизайн дисплея;
d) уменьшение неопределенности сигналов и улучшение их обнаруживаемости.
5.9.3.3 Основные и дополнительные меры защиты
Рекомендуемые меры защиты, связанные с данным видом опасности, отсутствуют.
5.9.3.4 Информация по использованию
Информация по использованию должна содержать инструкции по правильному способу работы с устройствами ручного управления и использованию робота по персональному уходу. Информация по использованию должна предусматривать необходимость надлежащего обучения, когда это необходимо.
5.9.3.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: А, С, D, Н.
5.10 Опасности, связанные с движением робота
5.10.1 Общие положения
Риск от опасностей, связанных с любым движением (намеченным или случайным) робота по персональному уходу, должен быть снижен до приемлемого уровня. Компоненты робота должны быть спроектированы, изготовлены, закреплены или размещены так, чтобы риски от опасностей, вызванных поломкой или расшатыванием, были снижены до приемлемых уровней.
Люди, на которых оказывается воздействие, должны быть защищены от опасного перемещения робота по персональному уходу, например переворачиваний и выбегов, при обычном использовании и работе робота, траекторий перемещения, уклонов и других подобных условий эксплуатации в его рабочей внешней среде.
5.10.2 Механическая неустойчивость
5.10.2.1 Общие положения
Роботы по персональному уходу должны быть спроектированы так, чтобы иметь достаточную устойчивость, позволяющую использовать их в указанных условиях применения. Особые требования по устойчивости для конкретных типов роботов в конкретных ситуациях определены в 5.10.6 и 5.10.7.
Робот по персональному уходу должен быть спроектирован так, чтобы минимизировать механическую неустойчивость (например, опрокидывание, падение или чрезмерный наклон при движении) из-за сбоя или реально предсказуемого неправильного использования.
Робот по персональному уходу должен быть спроектирован так, чтобы никаких экстраординарных действий или процедур не требовалось от пользователя для того, чтобы поддерживать его механическую устойчивость.
Механическая устойчивость не должна нарушаться ни на какой стадии жизненного цикла робота (включая перенос, транспортировку, установку, использование, вывод из эксплуатации и демонтаж).
Робот по персональному уходу должен соответствовать стандартам по механической устойчивости, подходящим для его использования по назначению (например, для мобильных роботов по персональному уходу см. ИСО 7176-1 и ИСО 7176-2 для статической и динамической устойчивости кресел-каталок).
Устойчивость должна поддерживаться относительно статических и динамических сил, исходящих от любых подвижных частей и полезных нагрузок роботов по персональному уходу (например, от выдвигающихся манипуляторов).
5.10.2.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) проектирование области опоры на земле настолько большой, насколько это практично;
b) проектирование расположения центра тяжести робота по персональному уходу настолько низко, насколько это практично;
c) проектирование робота по персональному уходу так, чтобы воздействия от механического резонанса не могли привести к неустойчивости;
d) проектирование расположения масс подвижных частей, особенно манипулятора, настолько низко, насколько это практически оправданно.
5.10.2.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
а) использование управления устойчивостью;
b) средства для выявления наступления неустойчивости и действия (или их прекращение) для снижения опасности;
c) средства для снижения скорости или диапазона перемещений манипулятора;
d) средства для предотвращения перегрузки.
Пример - Датчики наклона, ремни безопасности, трубчатый каркас, управление с обратной связью, мониторинг и контроль точки нулевого момента.
Любые системы управления, реализующие перечисленные выше функции, должны соответствовать 6.1 согласно общей оценке рисков для робота.
5.10.2.4 Информация по использованию
Информация по использованию должна содержать ограничения по применению робота по персональному уходу, касающиеся наклона поверхности передвижения, скорости, полезной нагрузки и т.п.
5.10.2.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, Н.
Примечание - Для кресел-подъемников применим ИСО 7176, но тестирование роботов по персональному уходу может также включать возможности по подъему пользователя.
5.10.3 Неустойчивость при передвижении
5.10.3.1 Общие положения
Роботы по персональному уходу, способные передвигаться, должны быть спроектированы так, чтобы обеспечить отсутствие любых опасных опрокидываний, выбегов или падений частей их корпусов или полезных нагрузок, перевозимых во время передвижения. Это должно быть обеспечено для всех предусмотренных типов передвижения (например, движения вперед/назад, вращения, повороты/развороты на 180°, ускорения и торможения) в указанных средах эксплуатации робота, которые определяются в зависимости от конкретного вида применения и конструкции.
Для роботов по персональному уходу, чья устойчивость изменяется в зависимости от конфигураций и нагрузок, должны быть определены скорости и ускорения для каждой возможной ситуации.
Для роботов по персональному уходу, перемещающихся автономно, система управления должна быть спроектирована так, чтобы обеспечить устойчивость передвижения при предсказуемых условиях настолько, насколько это практично.
Любой человек, находящийся вблизи робота по персональному уходу, должен быть защищен от падения или опрокидывания робота.
При общей оценке рисков необходимо рассмотреть потенциальные опасности из-за неправильного позиционирования пассажиров в или на роботах для перевозки людей.
5.10.3.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) проектирование распределения масс робота по персональному уходу так, чтобы робот не мог упасть, опрокинуться или перевернуться даже при перемещении с максимальным ускорением/замедлением или поворотах на максимальной скорости на наихудшем градиенте поверхности перемещения в рамках целевой внешней среды, определенной для данного робота;
b) конструкция движителей (например, колес, ног/ступней) должна обеспечивать достаточное сцепление с поверхностью на всех ее типах, даже на скользких поверхностях и т.п., в рамках целевой внешней среды, определенной для данного робота;
c) проектирование устойчивости робота по персональному уходу так, чтобы он не падал, не опрокидывался или не перевертывался при перемещении по неровной поверхности вплоть до самых тяжелых условий в рамках целевой среды, определенной для данного робота.
5.10.3.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) восприятие поверхности перемещения, как описано в 6.5.3;
b) робот по персональному уходу должен уметь планировать траекторию перемещения для выполнения поставленного задания на основе технологий восприятия внешней среды;
c) средства для защиты робота по персональному уходу от падения из-за разных неровностей (например, ступени, ямы) или от перевертывания должны быть обеспечены для намеченной внешней среды функционирования (см. 6.5.2.2);
d) ограничение динамики (например, скорости, ускорения и центра масс) робота по персональному уходу в пределах, обеспечивающих отсутствие опрокидывания даже при попытке повернуть в условиях самого худшего градиента поверхности перемещения, определенного для намеченной внешней среды функционирования робота;
e) наличие ремней безопасности у роботов для перевозки людей;
f) непрерывное отслеживание расположения пассажиров для безопасной транспортировки у роботов для перевозки людей, и соответствующей реакции (например, защитная остановка) при обнаружении неправильного расположения;
g) использование предупреждающих сигналов, например звуковых, визуальных, вибрационных, или любой комбинации таких сигналов.
Любые системы управления, реализующие перечисленные выше функции, должны соответствовать 6.1 согласно общей оценке рисков для робота.
5.10.3.4 Информация по использованию
Информация по использованию должна определять условия внешней среды, при которых робот по персональному уходу может функционировать. Для условий внешней среды, которые могут привести к опасным ситуациям, но которые похожи на ситуации, при которых робот все-таки выполняет поставленные задания, информация по использованию должна содержать предупреждения.
Для роботов для перевозки людей информация по использованию должна быть предоставлена пользователю (пассажиру) с необходимой инструкцией и предупреждениями, стимулирующими пользователя воспользоваться предоставляемыми защитными средствами (например, ремнями безопасности, шлемом и т.п.).
Должно быть обеспечено необходимое обучение, чтобы избежать ненормальных и резких действий, например, неожиданных поворотов, ускорений/торможений.
5.10.3.5 Верификация и валидация
Характеристики устойчивого перемещения должны быть оценены при разных состояниях поверхности, связанных с безопасностью, в соответствии с результатами общей оценки рисков (состояний поверхности, например, ковры, металлические плитки, пластиковый ламинат и дерн).
Подходящий метод (или методы) должен быть выбран из следующих: В, D, F.
5.10.4 Неустойчивость при переносе грузов
5.10.4.1 Общие положения
Изменение кинематических свойств робота по персональному уходу из-за полезного груза (включая пассажиров) не должно вызывать какую-либо опасность.
Любой человек, находящийся вблизи робота по персональному уходу, должен быть защищен от падения связанных с безопасностью объектов при выполнении роботом заданий, а также при переносе максимальных грузов. Это относится и к неровным и подвижным грузам (например, колебания жидкостей в контейнерах).
При общей оценке рисков необходимо рассмотреть последствия падения грузов и любые действия, требуемые от робота по персональному уходу в результате любого подобного события.
Для аварийного режима работы величина максимального торможения должна соответствовать динамическим критериям аварийного останова, включая требования по устойчивости и сохранению груза.
5.10.4.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) должны быть предусмотрены фиксаторы, площадки для размещения, опоры и т.п. на роботе по персональному уходу, но особенно для рабочих органов (например, захватных устройств или кистей робота), чтобы избежать возможных инцидентов, связанных с потерей груза;
b) использование конструкций, соответствующих форме груза;
c) использование пассивных средств закрепления грузов (например, винтов, эластичных веревок, пружинных защелок);
d) использование ограничительных устройств, чтобы избежать переноса грузов, превышающих максимально допустимую полезную нагрузку.
5.10.4.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) грузы должны быть привязаны или закреплены болтами или фиксаторами либо удерживаться захватным устройством;
b) максимальная скорость и ускорение должны соответствовать требованиям по устойчивости груза во время нормальной работы;
c) при нормальной работе, включая защитный или аварийный останов, величина торможения должна соответствовать требованиям по устойчивости груза.
Любые системы управления, реализующие перечисленные выше функции, должны соответствовать 6.1 согласно общей оценке рисков для робота.
5.10.4.4 Информация по использованию
Информация по использованию должна содержать информацию о максимальных габаритах и/или весе и типе переносимых грузов (если это необходимо), а также по каким-либо ограничениям для них. Если грузы требуют закрепления при переносе, то должны быть приведены соответствующие инструкции.
5.10.4.5 Верификация и валидация
Характеристики кистей, захватных устройств и фиксаторов должны быть определены с помощью серии экстремальных движений, например ускорение, останов, поворот на 180°, мобильного робота по персональному уходу и быстрых движений манипулятора. Все тесты должны выполняться с максимальной нагрузкой и на максимальной скорости.
Подходящий метод (или методы) должен быть выбран из следующих: В, D, F.
5.10.5 Неустойчивость при столкновении
5.10.5.1 Общие положения
Связанные с безопасностью объекты должны быть защищены от опасных движений после или во время столкновения. Столкновение между роботом по персональному уходу и любым другим связанным с безопасностью препятствием не должно вызывать неустойчивости робота.
a) При общей оценке рисков необходимо определить допустимые максимальные значения соответствующих параметров (например, контактной силы), влияющих на риск, вызванный контактом, выходящим за пределы рабочего диапазона робота.
b) Робот по персональному уходу должен быть спроектирован так, чтобы обеспечить отсутствие каких-либо опасных опрокидываний, выбегов или отсоединения частей корпуса робота даже в том случае, если на робот действуют какие-либо силы в результате столкновения или он получает сигналы о наличии связанного с безопасностью препятствия во время движения, которые не превышают пределов, установленных для его нормальной эксплуатации.
5.10.5.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) проектирование распределения масс и формы робота по персональному уходу так, чтобы ненамеренные столкновения, находящиеся в пределах установленных максимальных ограничений, не приводили к опрокидыванию робота;
b) использование мягких материалов для демпфирования сил, приводящих к опасной неустойчивости.
5.10.5.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) использование подушек или ремней безопасности, чтобы предотвратить вред в результате опрокидывания робота по персональному уходу;
b) характеристики торможения мобильной платформы робота по персональному уходу должны предотвращать выбег робота при столкновении с максимально допустимой силой (см. 6.2.3);
c) способ перемещения робота по персональному уходу должен минимизировать контактные силы при столкновении (см. 6.6);
d) использование управления скоростью (см. 6.4) для минимизации неустойчивости и контактных сил при столкновениях.
5.10.5.4 Информация по использованию
Информация по использованию должна содержать подробные данные о параметрах, определяющих диапазон потенциально опасных сил, и сценарии столкновений, которые могут быть допущены.
5.10.5.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, F, G.
5.10.6 Неустойчивость при подсоединении или отсоединении робота для оказания физической помощи закрепляемого типа
5.10.6.1 Общие положения
Роботы по персональному уходу закрепляемого типа (например, экзоскелетоны) должны быть спроектированы так, чтобы обеспечивать устойчивость при присоединении к пользователю или отсоединении от него.
Роботы, которые остаются выключенными во время присоединения или отсоединения, должны быть спроектированы так, чтобы они могли перемещаться без усилия в требуемую позицию и чтобы был предотвращен неожиданный запуск.
Роботы, которые приводятся в движение приводами во время присоединения и отсоединения, должны быть спроектированы так, чтобы не могли происходить никакие опасные движения и не могли возникать силы, действующие на части тела человека, которые могут оказать какой-либо вред.
5.10.6.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) средства для присоединения или отсоединения робота от человека должны быть спроектированы так, чтобы человек мог оставаться в устойчивом положении (например, сидя или лежа) во время процедуры присоединения/отсоединения;
b) использование приводов значительно меньшей мощности, которые не могут навредить человеку при присоединении или отсоединении робота.
5.10.6.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) робот должен быть спроектирован так, чтобы он мог определить, что робот неправильно присоединен к пользователю. Если он неправильно присоединен к пользователю, то робот должен выдать предупреждение и перейти в безопасное состояние;
b) во время процедуры присоединения силы и скорости в суставах робота должны быть ограничены до соответствующих безопасности значений скорости (см. 6.4) и силы (см. 6.7);
c) робот должен быть спроектирован так, чтобы преднамеренное отсоединение или ненамеренное отделение робота во время нормальной работы приводило к его переходу в безопасное состояние.
5.10.6.4 Информация по использованию
Информация по использованию должна содержать инструкции по присоединению и отсоединению робота от пользователя, включая необходимую конфигурацию робота и соответствующие условия внешней среды и поверхности.
5.10.6.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, D, Е, F, G.
5.10.7 Неустойчивость при посадке и высадке робота для перевозки человека
5.10.7.1 Общие положения
Роботы для перевозки человека должны быть спроектированы так, чтобы обеспечивать отсутствие опрокидывания или выбега при посадке или высадке пассажира из робота в ситуациях его использования по назначению.
5.10.7.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) расположение центра масс и форма робота не должны приводить к опрокидыванию при посадке и высадке;
b) характеристики торможения мобильной платформы робота для перевозки человека должны предотвращать какое-либо движение при посадке или высадке пассажира.
5.10.7.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) робот для перевозки человека должен быть спроектирован так, чтобы были предусмотрены меры активного управления устойчивостью, способные приспосабливать робота к любым колебаниям центра тяжести при посадке или высадке пассажира в соответствии с 6.1;
b) робот для перевозки человека должен находиться в нужной конфигурации до начала посадки или высадки в нормальных ситуациях;
c) робот для перевозки человека должен быть спроектирован так, чтобы переходить в достаточно безопасную конфигурацию для обеспечения высадки в аварийных ситуациях;
d) робот должен определять присутствие пассажира в правильном положении в или на роботе до начала движения.
5.10.7.4 Информация по использованию
Информация по использованию должна содержать инструкции по процедурам посадки и высадки и мерам предосторожности, которые должен предпринимать пользователь. В ней также должна содержаться информация о необходимой конфигурации робота при посадке и высадке.
5.10.7.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D.
5.10.8 Столкновение с препятствиями, связанными с безопасностью
5.10.8.1 Общие положения
Роботы по персональному уходу должны быть спроектированы так, чтобы риск от опасных столкновений с препятствиями, связанными с безопасностью (см. 3.21.2), был настолько низким, насколько это практически реализуемо (см. 4.3, примечание 2). Общая оценка рисков должна быть произведена, включая процедуры, что делать при столкновениях между роботом и препятствиями, связанными с безопасностью.
5.10.8.2 Конструкция, обеспечивающая безопасность
К безопасной конструкции относятся, но не ограничиваются ими, следующие меры:
a) физическое ограничение скорости передвижения робота по персональному уходу до безусловно безопасного максимума;
b) подвижные части должны быть спроектированы так, чтобы допустимая энергия соударения не могла быть превышена;
c) использование материалов или конструкций, снижающих силы соударения до уровней, не оказывающих вреда.
5.10.8.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) вычисление минимального расстояния между роботом по персональному уходу и связанным с безопасностью препятствием в соответствии с ИСО 13855. При этом скорость приближения к человеку может меняться в зависимости от применения, а робот должен останавливаться, если данное расстояние не поддерживается. Данная мера может быть реализована с помощью управления положением и скоростью (см. 6.3) или с помощью функций, которые позволяют обходить связанные с безопасностью препятствия, например, используя электрочувствительное защитное оборудование (ESPE) (см. 6.5.2.1).
Примечания
1 В приложении В приведены критерии безопасности для роботов по персональному уходу.
2 В приложении С приведен пример применения мобильного робота по персональному уходу с возможностью обхода связанных с безопасностью препятствий. Скорость робота может управляться в безопасном пространстве, где относительная скорость связанных с безопасностью объектов определяется и может быть использована для управления снижением скорости;
b) реализация защитной остановки (см. 6.2.2.3) при появлении связанного с безопасностью препятствия в зоне защитной остановки робота по персональному уходу;
c) ручное или рулевое управление роботом по персональному уходу. В данном случае при общей оценке рисков необходимо рассмотреть, все ли столкновения с роботом могут быть предотвращены.
Примечание - Поскольку применяемые стандарты, например комплекс ИСО 13855, не предназначены для маленьких детей и младенцев, важно, чтобы рассматривались более строгие и серьезные требования к определению препятствий (например, более низкое давление срабатывания бампера, меньшее разрешение ESPE для того, чтобы определить более маленькие конечности детей) по сравнению с теми, которые использовались при общей оценке рисков.
Для того чтобы уменьшить воздействие от возможных столкновений, должны быть применены одна или несколько из следующих мер:
- использование связанного с безопасностью управления скоростью (см. 6.3);
- использование связанного с безопасностью управления усилием (см. 6.7);
- использование связанного с безопасностью восприятия контакта (см. 6.5.2.2).
5.10.8.4 Информация по использованию
Информация по использованию должна описывать поведение робота, позволяющее избегать столкновений. Если для того, чтобы избежать столкновений, требуется любая степень ручного управления, то в информации по использованию должны быть представлены необходимые инструкции для пользователя, а также границы принятых мер по управлению роботом.
5.10.8.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: С, D, Е, F, G.
5.10.9 Опасный физический контакт при взаимодействии человека с роботом
5.10.9.1 Общие положения
Если при использовании робота по персональному уходу предполагается тактильное взаимодействие между человеком и роботом, то функции, гарантирующие безопасность человека при тактильном взаимодействии, должны быть определены с помощью общей оценки рисков (см. 4.3, примечание 2). Должны быть рассмотрены следующие аспекты:
a) определение присутствия человека в максимальном пространстве робота;
b) при намеченном тактильном взаимодействии физическая реакция (например, контактное усилие) от робота к человеку должна быть спроектирована настолько небольшой, насколько это практически возможно;
c) робот по персональному уходу должен быть спроектирован, насколько это практически возможно, так, чтобы избегать ненамеренного тактильного взаимодействия между человеком и частями робота, которые не являются частями робота, предназначенными для взаимодействия.
5.10.9.2 Конструкция, обеспечивающая безопасность
Для всех прикладных задач, предусматривающих физическое взаимодействие между человеком и роботом, робот по персональному уходу должен быть спроектирован так, чтобы уменьшить, насколько это практически возможно, уровни трения кожи человека с роботом, касательные напряжения, динамические удары, крутящие моменты, дуги центра тяжести, перемещения грузов и опоры для тела человека.
5.10.9.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) программно управляемые границы рабочего пространства робота по персональному уходу (см. 6.3);
b) ограничение скорости и связанное с безопасностью управление по скорости (см. 6.4);
c) ограничение усилий и связанное с безопасностью управление по усилию (см. 6.7).
5.10.9.4 Информация по использованию
Информация по использованию должна содержать информацию о назначенных для робота задачах и ситуациях для взаимодействия между человеком и роботом, включая возможные ограничения, касающиеся групп пользователей, условий внешней среды и т.д.
Должны быть представлены инструкции о том, как пользователи должны работать с роботом по персональному уходу для того, чтобы избежать травм, и предупреждения о потенциальных травмах, которые могут быть получены, если данные инструкции не соблюдаются.
5.10.9.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: C, D, F, G.
5.11 Опасности, связанные с недостаточным ресурсом прочности
5.11.1 Общие положения
Робот по персональному уходу должен быть спроектирован и построен так, чтобы его ресурс прочности обеспечивался на протяжении срока службы, не создавая опасностей.
Минимальные требования к ресурсу прочности робота по персональному уходу должны быть определены с помощью общей оценки рисков. Должны быть рассмотрены следующие аспекты:
- механические напряжения;
- материалы и их свойства;
- вибрации и излучения;
- условия внешней среды (например, температура, влажность);
- максимальные условия эксплуатации, полученные при эксплуатации в экстремальных ситуациях (неожиданных поворотах, ускорениях и замедлениях, неблагоприятных условиях внешней среды), включая сценарии и ситуации предсказуемого неправильного использования.
5.11.2 Конструкция, обеспечивающая безопасность
К безопасной конструкции относятся, но не ограничиваются ими, следующие меры:
a) механические неисправности должны быть предотвращены за счет строгого соблюдения соответствующих стандартов, например, ИСО 13823;
b) меры по предотвращению перегрузок должны быть включены в конструкцию робота по персональному уходу, включая механизмы, описанные в ИСО 12100 (если такие механизмы используются, то они должны соответствовать установленным стандартам);
c) к компонентам робота по персональному уходу, подвергающимся разнообразным напряжениям, должны быть применены соответствующие пределы усталости;
d) необходимая статическая и динамическая балансировка вращающихся компонентов;
e) конструкция электрических устройств, особенно электрических жгутов и разъемов, должна учитывать ожидаемое число циклов срабатывания;
f) использование пассивного рассеяния тепла (например, с помощью теплопроводности и конвекции).
5.11.3 Основные и дополнительные меры защиты
К защитным мерам относятся, но не ограничиваются ими, следующие меры:
a) контрольные функции для мониторинга и регулирования прикладываемых усилий (см. 6.7);
b) использование методов активного теплоотвода (например, вентиляторы или другие системы охлаждения);
c) при необходимости температуры внутри робота по персональному уходу, особенно вблизи источников тепла, должны контролироваться: робот должен реагировать должным образом (например, выключая себя безопасным способом), если превышены границы допустимых температур;
d) мониторинг жизненного цикла робота по персональному уходу и информирование пользователя, когда подходит время технического обслуживания или достигается конец срока службы.
5.11.4 Информация по использованию
Информация по использованию должна определять процедуры, необходимые для обеспечения ресурса прочности робота по персональному уходу, например, регулярная замена деталей.
Если требуется замена жгутов электрических соединений для того, чтобы защитить робот по персональному уходу от электрических помех, вызванных жгутом, то предел использования жгута электрического соединения должен быть обозначен в информации по использованию на основании частоты его подключения/отключения.
Если электрическая энергия подается напрямую (с помощью электрических кабелей), то предел использования электрического разъема должен быть обозначен в информации по использованию на основании частоты его подключения/отключения.
5.11.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, D, Е, Н.
5.12 Опасности, связанные с неправильными автономными решениями и действиями
5.12.1 Общие положения
Робот по персональному уходу, способный принимать автономные решения и совершать автономные действия, должен быть спроектирован так, чтобы неверные решения и неправильные действия не вызывали неприемлемого риска нанесения вреда.
Примеры
1 Ситуация, когда мобильный обслуживающий робот берет неверный напиток и подает кофе вместо воды в чашке, может быть приемлемым риском, но подача напитка в разбитом стакане может быть неприемлемым риском.
2 Ситуация, когда робот для перевозки человека делает резкое и неожиданное движение в сторону в пространстве с ровной поверхностью, может быть приемлемым риском, но движение в сторону в пространстве со скользкой поверхностью может быть неприемлемым риском.
Риск нанесения вреда в результате неправильных решений может быть снижен либо увеличением надежности принятия решения (например, с помощью более хороших сенсоров), либо ограничением воздействия неправильного решения (например, с помощью сужения границ использования).
5.12.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) ограничение сценариев эксплуатации для снижения риска нанесения вреда из-за неправильных действий;
b) использование уникальных идентификаторов для связанных с безопасностью объектов, траекторий перемещения и т.д.
5.12.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) возможности и надежность сенсоров и алгоритмов восприятия должны быть повышены до уровня, когда неприемлемый риск не может иметь место;
b) алгоритмы идентификации должны быть разработаны так, чтобы вероятность того, что определенное решение будет правильным (например, вероятность правильной идентификации некоторого связанного с безопасностью объекта), рассчитывалась и могла быть проверена. Решения с высокой степенью неопределенности должны быть заново оценены с использованием альтернативных подходов и/или дополнительной информации. Если после повторной оценки неопределенность остается неприемлемой, то должна быть запрошена внешняя помощь или произведена защитная остановка;
c) для решений, которые могут привести к опасным ситуациям, должен применяться контроль правильности.
Пример - Правильная идентификация связанного с безопасностью объекта может быть проверена, принимая во внимание место, где он обнаружен, или время и место, где его видели последний раз;
d) решения должны проверяться с помощью разнообразных принципов обработки сенсорной информации.
Все функции роботов по персональному уходу, реализующие требования перечислений а)-д)*, должны соответствовать требованиям к характеристикам системы управления, описанным в 6.1, согласно общей оценке рисков робота.
_____________
* Вероятно ошибка оригинала. Следует читать: а)-d). - .
5.12.4 Информация по использованию
Ограничения по использованию должны исключать ситуации, при которых решения вызывают неприемлемый риск нанесения любого вреда с учетом предсказуемого неправильного использования.
Информация по использованию должна сообщать об очувствлении и возможностях принимать решения робота по персональному уходу и должна предоставлять инструкции, как предотвратить нанесение вреда из-за неправильных действий и решений.
5.12.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, D, F, G.
5.13 Опасности, связанные с контактом с движущимися компонентами
5.13.1 Общие положения
Роботы по персональному уходу должны быть спроектированы так, чтобы риск от опасностей, вызванных соприкосновением с такими компонентами, как валы двигателей, шестерни, приводные ремни, колеса, гусеницы или рычажные передачи, был приемлемым.
Роботы по персональному уходу должны быть спроектированы в соответствии с ИСО 13857 для того, чтобы не допустить проникновение частей тела человека в опасные зоны.
5.13.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) робот по персональному уходу должен быть спроектирован с минимальным числом доступных движущихся частей;
b) робот по персональному уходу должен быть спроектирован с такими движущимися частями, в которых такие компоненты, как валы двигателей, шестерни, приводные ремни, колеса, гусеницы или рычажные передачи, не были бы видны.
5.13.3 Основные и дополнительные меры защиты
Опасности из-за движущихся частей должны быть предотвращены либо с помощью фиксированных ограждений, либо с помощью подвижных ограждений в зависимости от предсказуемой частоты доступа в соответствии с ИСО 14120.
Подходящий метод (или методы) должен быть выбран из следующих.
a) При использовании фиксированных ограждений должны применяться следующие меры:
1) фиксированные ограждения должны быть установлены так, чтобы они открывались или удалялись только с помощью инструментов;
2) фиксирующая система ограждений должна оставаться соединенной с ограждениями или с роботом по персональному уходу при удалении ограждений, если это полагается необходимым в соответствии с оцениванием рисков;
3) где это возможно, ограждения не должны иметь возможности оставаться на своем месте без их фиксирующих систем.
b) При использовании подвижных ограждений должны применяться следующие меры:
1) подвижные ограждения должны быть спроектированы так, чтобы они не могли быть легко удалены, а будучи открытыми, оставаться соединенными с роботом по персональному уходу;
2) подвижные ограждения должны быть связаны с опасными движениями так, чтобы опасные движения останавливались при их открытии; система управления, реализующая данную функцию, должна соответствовать разделу 6 согласно общей оценке рисков робота по персональному уходу; ограждение должно оставаться закрытым и заблокированным до тех пор, пока риск из-за опасных функций механизма, защищаемого ограждением, не будет устранен в соответствии с ИСО 14119.
c) Для обеспечения защиты от вращающихся компонентов должны быть использованы кожухи.
5.13.4 Информация по использованию
Если в конструкцию робота по персональному уходу включены фиксированные или подвижные ограждения, то информация по использованию должна содержать все инструкции, необходимые для их правильной установки, подгонки и удаления.
5.13.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: А, В, Н.
5.14 Опасности, связанные с отсутствием у людей информированности о роботах
5.14.1 Общие положения
В том случае, если общая оценка рисков показывает, что отсутствие у людей информированности о роботах представляет опасность, например когда беззвучная работа может повысить вероятность столкновения с людьми, робот по персональному уходу должен издавать заметный звук для уменьшения риска без нарушения других ограничений по шуму.
Если применяются предупреждающие или тревожные сигналы, то следует использовать общую оценку рисков, чтобы сбалансировать риск от опасностей, связанных с беззвучной работой, и опасностей, связанных с высоким уровнем шума или неожиданного шума.
Примечания
1 Предупреждения (например, акустические, визуальные) могут раздражать пользователя или любого другого человека, находящегося вблизи робота по персональному уходу, побуждая их воздействовать на робота для того, чтобы прекратить этот сигнал.
2 Пользователям с физическими недостатками могут также потребоваться альтернативные средства индикации, например, для людей с ослабленным зрением или проблемами со слухом.
5.14.2 Конструкция, обеспечивающая безопасность
В случае необходимости робот по персональному уходу должен быть спроектирован так, чтобы он имел очень заметный внешний вид и издавал заметный звук, не достигающий вредного шумового уровня.
5.14.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) акустические генераторы должны быть применены для предупреждения пользователей о потенциально опасных ситуациях;
b) предупреждающие световые и другие оптические устройства должны быть применены для предупреждения пользователей и других лиц о присутствии робота по персональному уходу;
c) робот по персональному уходу должен останавливаться при появлении связанного с безопасностью объекта в его зоне защитной остановки и должен продолжать выполнять свое задание после того, как данный объект покинет эту зону.
5.14.4 Информация по использованию
Если изготовитель обнаружил конкретную опасность, связанную с отсутствием информированности, то соответствующие предупреждения и советы пользователям должны быть приведены в информации по использованию.
5.14.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: B, D, F, G.
5.15 Опасные условия внешней среды
5.15.1 Общие положения
Роботы по персональному уходу должны быть спроектированы так, чтобы предсказуемые условия внешней среды при использовании по назначению не вызывали опасности.
Роботы по персональному уходу не должны вызывать опасность из-за наличия или накопления песка или пыли в окружающей среде. Если существует риск возникновения какой-либо опасности, вызванной загрязнением робота от пыли (что должно быть определено при общей оценке рисков), то все подверженные этому детали, компоненты или подсистемы робота должны быть спроектированы так, чтобы обеспечить минимальную степень защиты по IP 6Х в соответствии с МЭК 60529. Если проникновение пыли не является предметом для беспокойства, а единственным опасным риском является попадание песка (что должно быть определено при общей оценке рисков), то все подверженные этому детали, компоненты или подсистемы робота должны быть спроектированы так, чтобы обеспечить минимальную степень защиты по IP 5Х в соответствии с МЭК 60529.
Роботы по персональному уходу должны быть спроектированы так, чтобы не допускать связанных с пылью воспламенений из-за высокотемпературных компонентов (см. 5.7.4). Роботы должны быть спроектированы так, чтобы не допускать накопления опасного электростатического заряда (см. 5.5), а также накопления пыли на заряженных внешних поверхностях.
Роботы по персональному уходу должны быть спроектированы так, чтобы проникновение воды и влаги не вызывало какого-либо риска. Если существует риск какой-либо опасности, вызванной водой или влагой в роботе (что должно быть определено при общей оценке рисков), то все детали, компоненты, подсистемы и внутренние кожухи роботов по персональному уходу должны быть спроектированы так, чтобы обеспечить минимальную степень защиты по IP 6Х (сопротивление струям воды под давлением в течение трех минут) в соответствии с МЭК 60529.
Если робот по персональному уходу предназначен для работы в холодных внешних условиях, то он должен быть спроектирован толерантным по отношению к снегу и льду. Движущиеся части и электрические компоненты не должны отказывать из-за нарастания ледяной корки. Движущиеся части должны быть спроектированы толерантными к воде, влажности, пыли и песку. Электрические компоненты либо должны быть изолированы от воды или влаги, либо помещены внутри корпусов, обеспечивающих необходимую защиту. Источники электрической энергии и аккумуляторы должны быть защищены от короткого замыкания из-за погружения в воду или накопления влаги.
Если данный робот по персональному уходу предсказуемо может работать в прибрежных зонах, в других местах вблизи океанов, морей, других водоемов с соленой водой или на борту кораблей, то при общей оценке рисков для такого робота необходимо учитывать воздействие атмосферы с высокой степенью солености и струй соленой воды. Если признано, что коррозия из-за соли является потенциально опасной, то роботы должны быть обеспечены достаточной защитой для обеспечения приемлемого уровня риска.
5.15.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) герметизация суставов и других движущихся частей;
b) пылеустойчивые материалы для движущихся частей;
c) закрытие или герметизация электрических компонентов;
d) выбор материалов и принятие мер для неотъемлемой защиты от экстремальных температур (см. 5.7.4.2);
e) водо- и влагостойкие материалы;
f) солестойкий материал или покрытия, например, краски, лаки или органические покрытия.
5.15.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) механизмы для предотвращения накопления пыли (например, усиленная вентиляция или моечные механизмы);
b) защита от пыли и предупреждающие надписи, инструктирующие пользователя по выполнению необходимых действий;
c) воздушные фильтры в отверстиях корпусов;
d) использование нагрева для таяния снега или льда либо для испарения влаги или небольших капель воды, чтобы высушить робот по персональному уходу до возникновения опасностей.
Примечание - Таяние снега и льда может привести к возникновению опасности из-за воды или влажности, если это спроектировано неправильно;
e) удаление воды или влаги с поверхностей (например, с помощью стеклоочистителей);
f) внешнее удаление снега или льда с поверхностей (например, мытьем горячей водой);
g) активное определение условий появления снега, льда или холодного воздуха и выполнение защитной остановки до того, как уровни нарастания снега или льда достигнут неприемлемого уровня; при этом робот должен информировать пользователя о причине остановки;
h) робот по персональному уходу должен иметь встроенную предохраняющую функцию, обеспечивающую периодические остановки или выключения для технического обслуживания (которое обычно состоит из осмотра и либо очистки, либо замены деталей); при этом робот должен информировать пользователя, что он выключен с этой целью. Для данного требования длительность периода между выключениями должна быть основана на времени, которое требуется для того, чтобы риск достиг неприемлемого уровня из-за, например, коррозии, накопления песка, пыли или снега.
Примечание - ИСО 4629 содержит руководство по оценке деградации красок и лаков.
5.15.4 Информация по использованию
Если от пользователя требуется какое-либо действие для предотвращения рисков, то все необходимые действия, а также необходимые материалы (например, инструменты, ткани, жидкости) должны быть описаны в информации по использованию. Такие действия могут включать:
- осмотр, например, для выявления коррозии от соли или абразивного воздействия песка;
- очистку для предотвращения или удаления песка, пыли, снега или льда;
- сушку;
- техническое обслуживание и замену деталей.
5.15.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, С, D, F, Н.
Рейтинг IP робота по персональному уходу должен оцениваться в соответствии с МЭК 60529.
Если требуются проверки с использованием соленых струй, то они должны соответствовать ИСО 9227. Если коррозия поверхности оптического датчика имеет существенное значение, то она должна проверяться в соответствии с ИСО 21227-3.
5.16 Опасности, связанные с ошибками определения местоположения и навигации
5.16.1 Общие положения
Роботы по персональному уходу, способные определять свое местоположение и осуществлять навигацию, должны быть спроектированы так, чтобы неопределенность ошибок определения местоположения и навигации не приводила к неприемлемому риску.
Неопределенность в определении местоположения не должна приводить к опасному движению мобильной платформы или другой части робота. Ошибки определения местоположения, которые могут привести к тому, что робот войдет в запрещенное пространство или потеряет механическую устойчивость в опасной форме (например, упадет с лестницы), должны быть предотвращены.
Способность робота по персональному уходу к навигации должна быть достаточной для того, чтобы планирование движения к любой достижимой цели могло быть реализовано и чтобы построенная траектория не проходила через позиции расположения любых известных заранее объектов, связанных с безопасностью. Построенная траектория не должна приводить к неприемлемому риску столкновения и механической неустойчивости.
Если определение местоположения и навигация используются для снижения рисков, то эти функции системы управления должны соответствовать требованиям, изложенным в 6.1.
5.16.2 Конструкция, обеспечивающая безопасность
В соответствующих случаях должны быть применены следующие меры:
a) проектирование робота по персональному уходу для внешних сред и задач, для которых способность к навигации не требуется для снижения рисков;
b) реализация функций обеспечения безопасности для избегания столкновений, восприятия поверхности передвижения и т.п. способом, при котором способность к навигации не требуется для безопасной работы робота по персональному уходу;
c) если для определения местоположения используются ориентиры (естественные или искусственные), то достаточное число ориентиров должно быть заметно роботу по персональному уходу из любой точки его рабочего пространства: ориентиры или маркеры, используемые для навигации, должны быть недвусмысленными.
5.16.3 Основные и дополнительные меры защиты
В соответствующих случаях должны быть применены следующие меры:
a) мониторинг стабильности и достоверности определения местоположения и переход в безопасное состояние в случае нестабильного определения местоположения;
b) компенсация нестабильного определения местоположения, например, с помощью одометрии или других сенсорных данных;
c) навигационные карты должны корректироваться с поступлением новой информации (например, от внутренних сенсоров или внешних источников) с достаточно высокой частотой, определенной с помощью общей оценки рисков, чтобы предотвратить риски, связанные с использованием устаревшей карты.
5.16.4 Информация по использованию
В информации по использованию должна быть определена намеченная внешняя среда для работы робота, а также представлена информация о том, при каких условиях ошибки определения местоположения или навигации могут иметь место.
5.16.5 Верификация и валидация
Подходящий метод (или методы) должен быть выбран из следующих: В, F, G.
6 Требования к системе управления, связанные с безопасностью
6.1 Необходимые характеристики безопасности
6.1.1 Общие положения
Если в системе управления реализуются меры защиты, то они должны соответствовать требованиям, определенным в данном разделе. Необходимый уровень эффективности защиты (УЭЗ) или уровень полноты безопасности (УПБ) функций системы управления (электрических, гидравлических, пневматических и программных) робота по персональному уходу должен быть определен с помощью общей оценки рисков и должен соответствовать ИСО 13849-1 или МЭК 62061. Данное требование может включать также верификацию и подтверждение соответствия.
Если для снижения рисков используется одна или несколько из следующих функций, то УЭЗ или УПБ должен быть определен для каждой используемой функции, если только не применяются требования, определенные в 6.1.4:
- аварийная остановка (6.2.2.2);
- защитная остановка (6.2.2.3);
- ограничения рабочего пространства (6.3), включая избегание запрещенных пространств (6.5.3);
- связанное с безопасностью управление скоростью (6.4);
- связанное с безопасностью управление усилием (6.7);
- предотвращение опасных столкновений (6.5.2.1, 6.5.2.2);
- управление устойчивостью, включая защиту от перегрузки (6.6, 6.7).
Ниже определены по два подтипа для каждого типа робота по персональному уходу, представляющие два уровня риска. На изготовителе лежит ответственность определить, какую категорию или категории применить.
6.1.2 Типы роботов по персональному уходу
6.1.2.1 Мобильный обслуживающий робот
Тип 1.1. Небольшой И легкий И медленный И без манипулятора.
Тип 1.2. Большой ИЛИ не легкий ИЛИ быстрый ИЛИ с манипулятором.
6.1.2.2 Робот для оказания физической помощи
6.1.2.2.1 Закрепляемого типа
Тип 2.1. Физическая помощь малой мощности (пользователь может пересилить робота по персональному уходу).
Тип 2.2. Физическая помощь большой мощности (пользователь не может пересилить робота по персональному уходу).
6.1.2.2.2 Незакрепляемого типа
Тип 2.3. Малой мощности И без автономного режима И статически устойчивый И легкий И медленный.
Тип 2.4. Не малой мощности ИЛИ с автономным режимом ИЛИ не статически устойчивый ИЛИ не легкий ИЛИ быстрый.
6.1.2.3 Робот для перевозки человека
Тип 3.1. Стоящий одинокий пассажир И ровные поверхности внутри помещений И медленный И легкий И полуавтономный.
Тип 3.2. Несколько пассажиров ИЛИ не стоящие пассажиры ИЛИ на открытом воздухе ИЛИ неровные поверхности ИЛИ не медленный ИЛИ не легкий ИЛИ автономный.
Примечания
1 Размер считается "небольшим", если он достаточно мал, чтобы упавший или опрокинувшийся робот не мог соударяться с верхней частью тела пользователя (включая сидящего или лежащего человека в зависимости от использования по назначению). Максимальный размер, который может считаться небольшим, определяется изготовителем в зависимости от решаемых задач и групп пользователей.
2 Вес считается "легким", если он достаточно низок для того, чтобы нанести повреждения или другие небольшие травмы в результате соударения, и один пользователь может его поднять, чтобы освободить себя в случае зажатия. Максимальный вес, который может считаться легким, определяется изготовителем в зависимости от решаемых задач и групп пользователей.
3 Скорость считается "медленной", если она ниже скорости обычной ходьбы целевой группы пользователей, которая определяется с помощью общей оценки рисков. Для здоровых взрослых людей обычно принимается, что скорость ходьбы равна 6 км/час.
4 Мощность считается "малой", если она достаточно мала для того, чтобы более серьезные повреждения, чем небольшие травмы, были вероятны после применения мер по конструкции, обеспечивающей безопасность. Максимальная мощность, которая может считаться малой, определяется изготовителем в зависимости от решаемых задач и групп пользователей.
5 Понятие "статически устойчивый" предполагает, что устойчивость робота поддерживается во время спокойного стояния при выключенном питании после применения мер по неотъемлемо безопасной конструкции. В зависимости от использования робота по назначению, данное понятие включает поддержание устойчивости как пользователя, так и робота, когда пользователь находится в контакте с роботом, например, берясь за рукоятки, установленные на роботе, или опираясь на робота.
6.1.3 Необходимый уровень эффективности защиты для выбранных типов роботов по персональному уходу
Уровни эффективности защиты, определенные в таблице 1, характеризуют стандартную эффективность защиты, которая, как ожидается, обеспечит достаточное снижение риска в большинстве применений. Однако из этого не следует, что во всех применениях функции безопасности с данными УЭЗ обеспечат требуемое снижение всех рисков. Уровни эффективности защиты, определенные в таблице 1, должны использоваться для всех случаев, кроме тех, для которых в 6.1.4 определены другие требования.
Таблица 1 - Уровни эффективности защиты для роботов по персональному уходу
Функции безопасности роботов по персональному | Тип робота | |||||||
уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
6.2.2.2 Аварийная остановка | d (без возможности малого риска) | с | d | с | d | d | d | d |
6.2.2.3 Защитная остановка | b | d | b | d | b | с | с | с |
6.3 Ограничения рабочего пространства (включая избегание запрещенных пространств 6.5.3) | b | d | b | d | a | d | - | е |
6.4 Управление скоростью, связанное с безопасностью | b | d | b | b | b | d | с | е |
6.7 Управление усилием, связанное с безопасностью | b | d | b | e | a | b | - | - |
6.5.2.1, 6.5.2.2 Предотвращение опасных столкновений | b | d | - | - | b | d | - | е |
6.6, 6.7 Управление устойчивостью (включая защиту от перегрузки) | b | d | - | с | b | d | b | d |
| ||||||||
6.1.4 Требования к уровням эффективности защиты для специальных применений
Результаты тщательной общей оценки рисков, произведенной для робота по персональному уходу и его использования по назначению, могут определить, что для данного применения необходима реализация уровней эффективности защиты системы управления, связанных с безопасностью, более высоких или более низких, чем те, которые определены в таблице 1.
Выбор одного из таких более высоких или более низких уровней эффективности защиты, связанных с безопасностью, должен быть определен индивидуально, а соответствующие ограничения и предупреждения должны быть включены в информацию по использованию, поставляемую с данным роботом.
6.1.5 Альтернативные методы
Другие стандарты, устанавливающие альтернативные требования по производительности (например, по надежности управления), также могут использоваться (например, ANSI/RIA R15.06-1999, 4.5.4). При использовании таких альтернативных стандартов для проектирования систем управления, связанных с безопасностью, должен быть обеспечен эквивалентный уровень снижения рисков.
6.2 Остановка робота
6.2.1 Общие положения
Робот по персональному уходу должен быть спроектирован так, чтобы обеспечивать безопасную остановку при намеренном торможении на любой скорости, не вызывая каких-либо опасных опрокидываний, выбегов или выпадения деталей робота и грузов.
Состояния остановки могут изменяться в зависимости от типа робота по персональному уход, поэтому состояния остановки робота должны быть определены его изготовителем. Если состояние остановки достигается и поддерживается обычной функции управления скоростью робота, то данная функция должна соответствовать 6.6. Если состояние остановки достигается независимой функцией остановки, то оно должно достигаться с помощью тормозного механизма, к которому предъявляются следующие требования:
a) он должен по возможности работать при прерывании подачи питания;
b) он должен останавливать робота по персональному уходу в рамках рабочего диапазона поставленного устройства (или устройств) определения присутствия связанных с безопасностью объектов с учетом всех заданных ограничений на параметры, например, на нагрузку, скорость, градиент и коэффициент трения с поверхностью передвижения, а также ожидаемое состояние износа деталей робота;
c) он должен устойчиво удерживать робота по персональному уходу с его максимально допустимой нагрузкой при максимальном градиенте рабочей поверхности передвижения, указанном изготовителем;
d) он должен работать при потере критических функций управления.
6.2.2 Функции остановки робота
6.2.2.1 Общие положения
Робот по персональному уходу должен иметь функцию защитной остановки, а независимая функция аварийной остановки должна быть обеспечена в соответствии с требованиями общей оценки рисков. Дополнительно эти функции могут иметь средства для связи с внешними защитными устройствами, а для аварийной остановки может быть обеспечен выходной сигнал. В таблице 2 представлено сравнение между функциями аварийной остановки и защитной остановки.
Примечание - В некоторых применениях защитная остановка предусматривает обеспечение питания приводов для поддержания устойчивости робота. Примером может быть шагающий персональный робот-помощник.
Таблица 2 - Сравнение аварийной и защитной остановок
Функция | Аварийная остановка | Защитная остановка |
Назначение | Аварийная ситуация | Защита или снижение риска |
Категория остановки (МЭК 60204-1) | 0 или 1 | 0, 1 или 2 |
Инициация | Ручная | Ручная, автоматическая или может быть автоматически инициирована связанной с безопасностью функцией |
Эффективность защиты связанной с безопасностью системы | Должна соответствовать эффективности защиты, определенной в 6.1 | Должна соответствовать эффективности защиты, определенной в 6.1 |
Сброс | Только ручной | Ручной или автоматический |
Частота использования | Нечасто | От часто до нечасто |
Воздействие | Снятие питания с приводов, чтобы остановить распространение опасной ситуации | Безопасный контроль охраняемой опасности |
6.2.2.2 Аварийная остановка
Если требуется функциональная возможность аварийной остановки, то каждое командное устройство, способное инициировать движение робота или другую опасную ситуацию, должно иметь инициируемую вручную функцию аварийной остановки, которая:
a) соответствует требованиям подраздела 6.1 и МЭК 60204-1 и имеет приоритет над всеми другими функциями управления роботом;
b) вызывает остановку всех контролируемых опасностей;
c) снимает питание с приводов робота, если робот находится в безопасном состоянии;
d) обеспечивает возможность контроля опасностей, контролируемых системой управления роботом;
e) остается активной до сигнала сброса;
d) должна быть сброшена только ручным действием, которое не вызывает перезапуска после сброса, но должно только разрешить осуществление перезапуска.
Если расположение кнопки аварийной остановки на командном устройстве невозможно (например, для речевых интерфейсов, применения экрана компьютера или дистанционного управления), необходимо обеспечить, чтобы такой же уровень безопасности достигался при существующих средствах аварийной остановки (например, кнопка непосредственно на или вблизи робота по персональному уходу).
Выбор остановки категории 0 или категории 1 для данной функции должен быть определен в результате общей оценки рисков в соответствии с МЭК 60204-1.
Устройство аварийной остановки должно соответствовать МЭК 60204-1 и ИСО 13850.
Эффективность защиты аварийной остановки должна соответствовать 6.1. Разные виды роботов по персональному уходу должны иметь значения УЭЗ, приведенные в таблице 3.
Таблица 3 - Уровни эффективности защиты для аварийной остановки роботов по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Аварийная остановка | d | с | d | с | d | d | d | |
6.2.2.3 Защитная остановка
Если риски снижаются с помощью использования связанных с безопасностью функций управления, то робот по персональному уходу должен иметь одну или несколько функций защитной остановки. Категории этих функций остановки (как они определены в МЭК 60204-1) должны быть определены с помощью общей оценки рисков для данного применения.
Эти функции остановки должны контролировать охраняемые опасности, вызывая остановку всех опасных движений робота, снимая или контролируя питание на приводах робота и допуская контроль любой другой опасности, контролируемой системой управления роботом. Остановка может быть инициирована вручную или управляющими логическими схемами. Перезапуск робота должен быть инициирован вручную, если анализ рисков не допускает автоматический перезапуск.
Эффективность защиты функции защитной остановки должна соответствовать требованиям из 6.1.
Робот по персональному уходу может иметь функцию защитной остановки, использующую остановку категории 2, определенную в МЭК 60204-1, которая не приводит к отключению питания, но требует мониторинга состояния покоя после остановки робота. Любое непреднамеренное движение робота в состоянии покоя или ошибка при выполнении функции защитной остановки, должны приводить к остановке категории 0, определенной в МЭК 60204-1, в соответствии с общей оценкой рисков. Эффективность защиты функций мониторинга и нахождения в состоянии покоя должна соответствовать 6.1. См. таблицу 4.
Примечание - Функция контролируемой остановки категории 2, определенная в МЭК 60204-1, которая реализуется системой электрических приводов, может соответствовать безопасной рабочей остановке по МЭК 61800-5-2.
Таблица 4 - Уровни эффективности защиты для защитной остановки роботов по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Защитная остановка | b | d | b | d | b | с | с | е |
6.2.3 Эффективность характеристик торможения
При проектировании функций систем управления, обеспечивающих защитную остановку мобильной платформы робота, необходимо рассмотреть эффективность характеристик торможения платформы, а также расстояние, необходимое роботу по персональному уходу для полной остановки при всех возможных состояниях поверхности передвижения.
Эффективность характеристик торможения должна быть достаточной для того, чтобы опасное столкновение с любым связанным с безопасностью препятствием могло быть предотвращено, когда робот передвигается с номинальной скоростью и номинальной нагрузкой при заданных состояниях поверхности передвижения. Насколько это практически возможно, робот также должен быть способен остановиться перед связанным с безопасностью объектом при наихудших ожидаемых состояниях поверхности передвижения в соответствии с общей оценкой рисков.
Применяют одно из следующих требований:
a) если функции системы управления используются для обеспечения эффективности характеристик торможения робота по персональному уходу и/или установления связанного с безопасностью предела скорости для конкретной поверхности передвижения, то они должны соответствовать 6.1 с учетом всех предполагаемых условий эксплуатации;
b) робот по персональному уходу должен быть способен оценить состояния поверхности заранее и избегать опасных состояний поверхности, если это практически возможно. Данная функция должна соответствовать 6.1 с учетом всех предполагаемых условий эксплуатации.
6.3 Ограничение рабочих пространств
На рисунке 1 показаны рабочие пространства для роботов по персональному уходу.
Ограничение рабочего пространства может потребоваться для снижения риска, либо для ограничения движения робота по персональному уходу в рамках определенной области, либо для предотвращения захода робота в нее (примеры включения и исключения определенных областей с использованием рабочих пространств приведены в приложении В).
Разрешены программные ограничения в качестве средств определения и уменьшения ограниченного пространства при условии, что они обеспечат остановку робота при движении с полной номинальной нагрузкой и скоростью. Ограниченное пространство должно быть ограничено реально ожидаемой позицией остановки, которая учитывает расстояние, проходимое до полной остановки. Изготовитель должен указать на данную способность в информации по использованию и должен запретить программные ограничения, если данная способность не поддерживается.
|
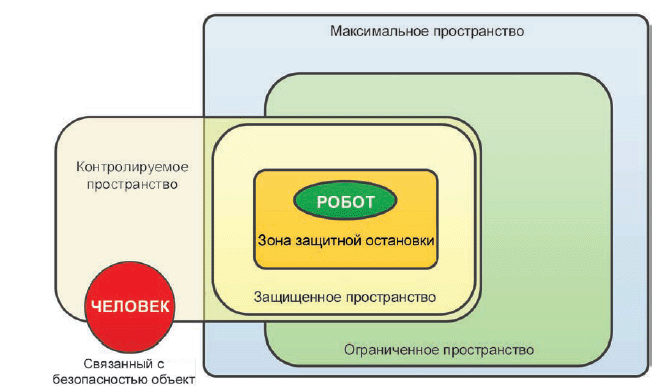
Рисунок 1 - Рабочие пространства для роботов по персональному уходу
Управляющие программы, которые контролируют и выполняют функции ограничения суставов и пространств на основе программных ограничений, должны соответствовать 6.1 и допускать внесение изменений только авторизованным персоналом. Если программные ограничения нарушаются, то должен быть инициирован переход в безопасное состояние. Движение при нарушении ограничения должно осуществляться при безопасном управлении скоростью в соответствии с 6.4. Текущие настройки и конфигурация ограничений безопасности должны быть зарегистрированы так, чтобы изменения конфигурации могли быть легко идентифицированы и проверены. См. таблицу 5.
Таблица 5 - Уровни эффективности защиты для управляющей функции ограничения рабочего пространства роботов по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Ограничения рабочего пространства (включая обход запрещенных зон) | b | d | b | d | а | d | - | е |
| ||||||||
6.4 Связанное с безопасностью управление скоростью
При общей оценке рисков необходимо определить связанный с безопасностью предел скорости для робота по персональному уходу, превысив который робот может причинить вред. Это должно быть сделано с помощью вычисления скоростей представительных точек на доступных движущихся частях робота. Только авторизованные специалисты должны иметь возможность настраивать допустимую максимальную скорость.
В зависимости от заданий, выполняемых роботом по персональному уходу, могут существовать разные пределы скорости, из которых только один действует в данной ситуации. Подходящий способ переключения пределов скорости должен быть определен при оценивании рисков.
Скорость робота по персональному уходу должна контролироваться, чтобы скорости движущихся частей робота не превышали связанного с безопасностью предела скорости.
Если предусмотрено, связанное с безопасностью управление скоростью должно быть спроектировано и реализовано так, чтобы в случае сбоя скорость рабочего органа манипулятора и других частей робота не превышала связанных с безопасностью пределов скорости. Кроме того, в случае сбоя должен быть инициирован переход в безопасное состояние. Эффективность защиты связанного с безопасностью управления скоростью должна соответствовать 6.1. См. таблицу 6.
Таблица 6 - Уровни эффективности защиты для связанного с безопасностью управления скоростью роботов по персональному уходу
Функции безопасности роботов | Тип робота | |||||||
по персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Связанное с безопасностью управление скоростью | b | d | b | b | b | d | с | е |
6.5 Связанное с безопасностью восприятие внешней среды
6.5.1 Общие положения
Связанное с безопасностью восприятие внешней среды должно соответствовать требованиям, изложенным в 6.1. Целями связанного с безопасностью восприятия внешней среды являются:
a) восприятие связанного с безопасностью объекта. Данная функция должна применяться, чтобы избежать опасных столкновений. К связанным с безопасностью объектам относятся люди, домашние животные и другие объекты внешней среды, которые связаны с безопасностью (см. примечание в 3.21.1). Устройства для выявления объектов должны применяться для того, чтобы обеспечить допустимые расстояния или контактные усилия между связанным с безопасностью препятствием и роботом по персональному уходу;
b) восприятие поверхности передвижения. Данная функция включает восприятие свойств поверхности передвижения (например, однородность, неровность и плотность) и ее геометрии (например, плоскостность, наклон, ступени и выемки) и должна применяться, чтобы избежать опасностей, связанных с неустойчивостью.
6.5.2 Восприятие объектов
6.5.2.1 Бесконтактное восприятие
Приборы для бесконтактного восприятия используются для:
- обеспечения минимальных рабочих расстояний и/или
- снижения относительной скорости сближения.
Для того чтобы избегать опасных столкновений и поддерживать требуемый уровень безопасности, применяются следующие требования:
a) если требуется выявлять присутствие людей, то должна использоваться защитная электрочувствительная аппаратура (ESPE), соответствующая подходящим частям МЭК 61496;
b) если ESPE используется в качестве основного воспринимающего прибора, то оно должно иметь необходимую надежность функционирования, а его монтаж должен быть выполнен в соответствии с общей оценкой рисков робота по персональному уходу;
c) если требуется выявлять связанные с безопасностью объекты, отличные от людей, другое бесконтактное воспринимающее оборудование, то может быть применено ESPE, а способность к выявлению и надежность такого оборудования должны соответствовать требованиям, определенным при общей оценке рисков.
Примечание - В МЭК/ТС 62046 приведено руководство по применению защитного оборудования.
Выявление одного или нескольких связанных с безопасностью объектов, находящихся на минимальном расстоянии, должно вызывать переход робота по персональному уходу в безопасное состояние с помощью:
- инициации защитной остановки в соответствии с 6.2.2.3, или
- инициации снижения безопасной скорости с помощью средств связанного с безопасностью управления скоростью в соответствии с 6.4, или
- поддержания безопасного расстояния до связанного с безопасностью объекта (объектов).
Если требуется выявление людей, то минимальное расстояние должно быть определено в соответствии с ИСО 13855.
Если требуется выявление других связанных с безопасностью объектов, отличных от людей (домашних животных, стен, мебели, границ максимальной зоны), то безопасное расстояние должно быть определено в соответствии с формулами из ИСО 13855, но исключая параметр дистанции проникновения "С".
Если бесконтактный прибор восприятия обеспечивает надежную информацию об относительной скорости сближения людей и позволяет роботу по персональному уходу определить наихудшую относительную скорость между роботом и приближающимся связанным с безопасностью объектом, то при вычислении минимального расстояния можно использовать определенную скорость для замены К в формулах из ИСО 13855. Уровень эффективности защиты бесконтактного прибора восприятия не должен ухудшать уровень эффективности защиты необходимой функции безопасности. См. таблицу 7.
Примечание - В приложении С описан типичный пример вычисления относительной скорости между роботом по персональному уходу и связанным с безопасностью объектом, движущимся в другом направлении, но с которым может произойти столкновение в следующей фазе движения.
Таблица 7 - Уровни эффективности защиты для управления предотвращением опасного столкновения роботов по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Предотвращение опасного столкновения | b | d | - | - | b | d | - | е |
| ||||||||
6.5.2.2 Контактное восприятие
Контактное восприятие требуется для многих задач взаимодействия человека с роботом. Поэтому робот должен безопасно определять даже небольшие контактные усилия и реагировать на них подобающим образом. В соответствующих случаях выявление контакта должно обеспечивать следующие возможности:
a) контакт должен выявляться по всей конструкции робота (то есть на уровне суставов);
b) контактные усилия должны быть ограничены необходимыми значениями, определенными при общей оценке рисков. Целесообразно получить эти ограничения на основе ограничений, установленных в других технических стандартах и научных публикациях (см. библиографию).
Контактное восприятие, используемое для выявления людей, должно соответствовать требованиям подходящих частей ИСО 13856. Если должны быть выявлены другие связанные с безопасностью объекты, отличные от людей, то необходимые способность и надежность выявления должны быть определены с помощью общей оценки рисков.
Защитная чувствительная к давлению аппаратура (PSPE) (например, чувствительные к давлению ребра, стержни, приборы, бамперы, пластины, провода) должна использоваться для предотвращения опасных соударений. Данные приборы контактного восприятия должны соответствовать данному подпункту в соответствии с применением робота по персональному уходу и общей оценкой рисков. Используемые в качестве связанных с безопасностью приборов восприятия элементы должны соответствовать 6.1 и должны монтироваться в соответствии с ИСО 13856.
6.5.3 Восприятие поверхности передвижения
В случае существования неприемлемого риска механической неустойчивости из-за состояния или геометрии поверхности передвижения робот по персональному уходу, способный передвигаться автономно, должен быть снабжен возможностью воспринимать или детектировать связанные с безопасностью геометрию и состояние поверхности, например, неровная поверхность, ступени.
Средства (установленные на борту или вне его) определения геометрии поверхности и условий передвижения должны быть способны определять и оценивать способность робота передвигаться по исследуемым областям.
Эффективность характеристик функции определения состояния поверхности должна быть достаточной для того, чтобы позволить роботу по персональному уходу оценить эффективность характеристик своей функции торможения в соответствии с требованиями из 6.2.3, а также поддерживать свою механическую устойчивость.
Если внешняя среда робота по персональному уходу оснащена маркерами, метками и/или магнитными лентами, которые могут быть надежно определены роботом, то они должны быть расположены в достаточном количестве и в местах, для которых у робота нет слепых пространств.
Примечание - Для проверки функции восприятия поверхности передвижения желательно, чтобы разные виды связанных с безопасностью поверхностных препятствий (например, выемки, бугры и/или ступени) были размещены между роботом по персональному уходу и целью его передвижения. Эффективность характеристик робота может быть затем проверена тем, сможет ли он безопасно преодолеть неблагоприятные условия поверхности или безопасно остановиться без застревания.
6.6 Управление устойчивостью
Робот по персональному уходу должен быть устойчивым во всех намеченных и разумно предсказуемых ситуациях использования. Эффективность функциональной безопасности функций, обеспечивающих устойчивость, должна соответствовать 6.1. Разные типы роботов по персональному уходу должны иметь УЭЗ, представленные в таблице 8.
Таблица 8 - Уровни эффективности защиты для управления устойчивостью робота по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Управление устойчивостью (включая защиту от перегрузки) | b | d | - | с | b | d | b | d |
| ||||||||
6.7 Связанное с безопасностью управление усилием
Усилия, действующие на человека или другие связанные с безопасностью объекты со стороны любой части робота по персональному уходу, должны контролироваться в рамках критерия максимальной безопасности контакта, такого как пределы развиваемых усилий.
Количественные требования по максимально безопасному контактному усилию или моменту должны быть хорошо проверены с помощью эргономических экспериментов. Пределы развиваемых усилий при непреднамеренном контакте со связанными с безопасностью объектами могут различаться в зависимости от областей применения и должны быть определены с помощью общей оценки рисков.
Управление связанным с безопасностью усилием должно быть обеспечено с помощью связанного с безопасностью восприятия контакта и алгоритмом реагирования, приводящим робот по персональному уходу в безопасное состояние, при котором порог по усилию не может быть превышен.
Реакция на контакт должна соответствовать по крайней мере следующим требованиям:
a) реагирование на непреднамеренный контакт должно быть достаточно быстрым, чтобы обеспечить непревышение границ связанных с безопасностью усилий;
b) при возникновении непреднамеренного контакта должен быть обеспечен перевод робота по персональному уходу в безопасное состояние.
Примечание - Описанные в литературе подходы к определению допустимых контактных усилий и болевых допусков можно найти в разделе "Библиография".
Эффективность функциональной безопасности связанных с безопасностью контроллеров усилий должна соответствовать 6.1. См. таблицу 9.
Таблица 9 - Уровни эффективности защиты для связанного с безопасностью управления усилием для роботов по персональному уходу
Функции безопасности роботов по | Тип робота | |||||||
персональному уходу | Мобильный обслуживающий робот | Робот для оказания физической помощи | Робот для перевозки человека | |||||
Тип 1.1 | Тип 1.2 | Тип 2.1 | Тип 2.2 | Тип 2.3 | Тип 2.4 | Тип 3.1 | Тип 3.2 | |
Связанное с безопасностью управление усилием | b | d | b | е | а | b | - | - |
| ||||||||
6.8 Защита в особых точках
Движения, проходящие вблизи особых точек, могут потребовать больших скоростей в суставах. Такие высокие скорости могут оказаться неожиданными и представлять риски для пользователя, оператора или находящихся поблизости людей.
К движениям робота по персональному уходу вблизи особых точек должны быть применены одна или несколько из следующих мер:
a) управление движением через особую точку, чтобы избежать любой опасности;
b) робот должен избегать особых точек, например, с помощью выполнения коррекции при планировании траектории;
c) останавливать движение робота и выдавать предупреждение до того, как робот пройдет особую точку, либо выполнять обходящее движение при координированном управлении всеми суставами.
6.9 Конструкция пользовательского интерфейса
6.9.1 Общие положения
Если для управления функциями робота по персональному уходу используются командные устройства (например, джойстики, пульты управления, системы распознавания речи и позы и/или другие средства), то их работа должна быть достаточно надежной.
Независимо от того, связано ли командное устройство с роботом кабелем или нет, его электрическая связь с роботом не должна вызывать опасностей.
Командные устройства должны обеспечивать управление отдельными или связанными функциями робота в ручном и полуавтономном режимах управления роботом.
6.9.2 Индикация состояния
Состояние командных устройств должно отображаться постоянно в ясной форме: например, питание включено, рабочий режим, обнаружен сбой. Состояние должно отображаться в видимом для оператора месте.
В случае дистанционного управления каждое командное устройство должно ясно отображать части робота по персональному уходу, которыми управляет данное устройство. Система дистанционного управления должна быть спроектирована и построена так, чтобы воздействовать только на:
- соответствующие части робота;
- соответствующие функции.
6.9.3 Подсоединение и отсоединение
При подсоединении, отсоединении или пересоединении любого командного устройства, является оно намеренным или нет, либо при возникновении проблем соединения командного устройства, робот по персональному уходу должен осуществить защитную остановку, если продолжение выполнения задания может привести к неприемлемому риску.
Дистанционно управляемый робот по персональному уходу должен быть спроектирован и построен так, чтобы он реагировал только на сигналы от предназначенного для него устройства (или устройств) управления.
6.9.4 Одно командное устройство для нескольких роботов
Управление и переключение управления несколькими роботами по персональному уходу от одного командного устройства не должно причинять какого-либо вреда пользователю или любому другому человеку.
Для оператора должно быть ясно видно, какой робот по персональному уходу находится под управлением командного устройства. Каждый робот должен быть выбран для управления до того, как на него будут переданы команды. Неожиданный запуск любого невыбранного робота должен быть предотвращен.
6.9.5 Несколько командных устройств
Если используются несколько командных устройств, то должны применяться следующие меры:
a) должна быть обеспечена ясная индикация для идентификации каждого активного командного устройства;
b) каждая функция робота по персональному уходу должна управляться в любой момент времени только одним командным устройством, за исключением функций аварийной или защитной остановки: в случае многорежимного единого пользовательского интерфейса (например, одновременное распознавание речи и позы), многорежимный коммуникационный интерфейс может рассматриваться как одно командное устройство;
c) должны быть приняты меры по предотвращению опасностей, возникающих из-за конфликтов множества команд;
d) переключение управления от одного командного устройства к другому не должно вызывать неприемлемого риска;
e) если отдельные функции активируются от разных командных устройств, то система управления должна быть спроектирована так, чтобы избежать причинения операторами вреда друг другу и другим связанным с безопасностью объектам;
f) прежде чем управление может быть передано от одного командного устройства другому, должно быть выполнено действие по передаче в явном виде.
Примечание - Это относится и к ситуациям, при которых ни одно из командных устройств не является активным (например, когда робот по персональному уходу находится в безопасном состоянии) и любое из них может взять управление на себя;
g) в соответствующих случаях на всех командных устройствах должно быть ясно показано, какое из них является активным, а какое нет.
6.9.6 Автономное или отсоединяемое командное устройство
Если одно или несколько автономных или отсоединяемых командных устройств доступны для управления роботом по персональному уходу, то должны применяться следующие меры:
a) в случае потери связи или если не поступают правильные управляющие сигналы, любой робот, управляемый таким устройством, должен быть переведен в состояние защитной остановки, если продолжение выполнения задания может привести к неприемлемому риску;
b) в соответствующих случаях максимальное время отклика на передачу данных (включая коррекцию ошибок) и потерю связи должно рассматриваться для расчета общей эффективности защиты (времени) остановки и должно быть указано в информации по использованию;
c) для командных устройств, в которых интегрированы устройства управления аварийной остановкой, должны быть обеспечены средства для предотвращения путаницы между активными и неактивными командными устройствами (например, хранение неактивных устройств в подходящем месте).
6.9.7 Защита от несанкционированного использования
В случае необходимости должны быть предприняты шаги по предотвращению несанкционированного использования управления или изменения параметров даже при удаленном доступе. Должны быть применены средства (например, защита паролем) для предотвращения любого несанкционированного использования в соответствии с общей оценкой рисков: например, использование антивандальных методов, таких как электронные ключи и устройства распознавания отпечатков пальцев, для предотвращения непреднамеренного запуска или движения робота по персональному уходу. Изготовитель должен предусмотреть разные уровни доступа для разных пользователей.
6.10 Режимы работы
6.10.1 Общие положения
Робот по персональному уходу должен быть спроектирован так, чтобы в каждый момент времени он работал в одном определенном режиме. Если общая оценка рисков показала, что какой-либо переход между двумя режимами является опасным, то робот должен осуществить защитную остановку непосредственно перед тем, как сменить режим работы. Выбор режима работы должен однозначно отображаться и не инициировать сам по себе движение робота или другие опасности.
Во всех режимах работы должно быть понятно, какие функции, связанные с безопасностью, активны и особенно какие выключены. При переключении между режимами работы любые приостановленные функции, связанные с безопасностью, должны быть возвращены в состояние своей полной функциональности. При применении в связанных с безопасностью целях функция выбора режима работы должна соответствовать требованиям из 6.1.
В таблице 10 приведены основные характеристики режимов работы роботов по персональному уходу.
Таблица 10 - Характеристики режимов работы роботов по персональному уходу
Характеристика | Режим работы | |||
Автономный режим | Полуавтономный режим | Ручной режим | Режим техобслуживания | |
Инициация действия | Роботом или пользователем | Пользователем | Пользователем | Авторизованным специалистом |
Частота вмешательства человека | Однажды/редко | Часто | Постоянно | Постоянно |
Степень контроля человеком | Нет/очень низкая | От низкой до высокой | Высокая | Высокая |
Пример задания | Задание по доставке или переносе для мобильного обслуживающего робота | Робот для перевозки человека с возможностью автономной навигации. Человек может менять скорость и направление | Обучение, телеуправление, программирование и проверка программы | Техническое обслуживание |
Ограничение для пользователя | Нет | Нет | Нет | Требуется замок с ключом или защита паролем |
6.10.2 Автономный режим
В данном рабочем режиме робот по персональному уходу движется автоматически или автономно. Необходимые функции, связанные с безопасностью, для автономного режима, определенные с помощью общей оценки рисков, должны быть активны.
6.10.3 Ручной режим
Ручной режим должен обеспечить управление роботом по персональному уходу с помощью вмешательства человека. Данный режим может быть использован для обучения, телеуправления, программирования и проверки программ робота. Информация по использованию должна содержать необходимые инструкции и предупреждения о том, что выполняется работа с навигацией/управлением вручную.
Должна быть проведена общая оценка рисков для того, чтобы определить, какие охранные и меры защиты должны быть активны в ручном режиме для снижения конкретных опасностей.
6.10.4 Полуавтоматический режим
Полуавтоматический режим должен позволить пользователю замещать или изменять функции робота по персональному уходу, например, руление, управление кистью, задачи взаимодействия человека с роботом при выполнении роботом заданных программ. В полуавтоматическом режиме автономный процесс может также заменить работу в ручном режиме, например, используя функцию автоматического предотвращения столкновений. При общей оценке рисков должны быть определены опасности, связанные с работой в полуавтоматическом режиме, обращая внимание, в частности, на то, как начинается вмешательство человека.
Когда автономный процесс замещает ручное управление, робот по персональному уходу должен обеспечить заметную индикацию состояния замещения для оператора. Индикации замещения (например, видимый свет, звук, вибрации) должны быть спроектированы так, чтобы быть легко распознаваемыми для оператора.
Примечание - Оказание физической помощи с использованием робота по персональному уходу не рассматривается как замещение, тогда как автономное торможение для предотвращения столкновения в то время, как оператор нажимает на педаль акселератора, считается замещением.
Приоритеты автономного процесса и ручного управления должны быть определены с помощью общей оценки рисков.
6.10.5 Режим техобслуживания
Если для выполнения операций по техническому обслуживанию требуется, чтобы робот работал со смещенными или снятыми ограждениями и/или при выключенных защитных устройствах, то должен быть реализован режим техобслуживания. При переходе в этот режим переключатель режимов должен одновременно:
a) выключить все другие режимы управления или работы;
b) разрешить выполнение опасных функций только с помощью управляющих устройств, требующих непрерывного воздействия (работающих по принципу "удерживать, чтобы двигаться");
c) разрешить выполнение опасных функций только в условиях сниженного риска (например, на низкой скорости, при небольшом усилии) с устранением опасностей от связанных последовательностей действий;
d) не допускать любое выполнение опасных функций из-за преднамеренного или непреднамеренного действия с сенсорами робота.
Переход в режим техобслуживания должен быть возможен только с использованием соответствующих средств, которые фиксируют и разрешают исключительно данный режим, например, управляемое ключом переключение или другие средства, обеспечивающие эквивалентную безопасность (например, доступ с паролем).
Кроме того, оператор должен управлять любыми движущимися частями только с помощью исполнительных управляющих устройств или командных устройств, которые соединены кабелем или прикреплены к роботу по персональному уходу. Устройства дистанционного управления (см. 6.9.2 и 6.9.3) или автономные/отсоединяемые командные устройства (см. 6.9.6) не должны использоваться, пока робот находится в данном режиме. Длина кабелей, используемых для работы в этом режиме, не должна превышать максимальную длину, ширину или высоту робота (то, что из трех является наибольшим), если это будет признано необходимым при общей оценке рисков.
Если любое из перечисленных выше условий становится невыполняемым во время работы с удаленными ограждениями или выключенными функциями обеспечения безопасности, то робот по персональному уходу должен инициировать защитную остановку в соответствии с 6.2.2.3.
Примечание - При фиксировании робота в зажимном приспособлении для ограничения его движения техническое обслуживание может быть разрешено без переключения робота в режим техобслуживания.
Инструкции по работе робота по персональному уходу в данном режиме и предупреждения о любых опасностях, связанных с работой при снятых ограждениях, должны быть приведены в информации по использованию (см. раздел 8).
6.11 Устройства ручного управления
6.11.1 Общие положения
Если командное устройство реализовано с устройствами ручного управления, которые инициируют подачу питания или движение, то они должны быть спроектированы и построены так, чтобы соответствовать критериям эффективности защиты, установленным в 6.9.2-6.9.6.
6.11.2 Индикация состояния
Состояние устройств ручного управления должно ясно отображаться в любое время, например, питание включено, режим работы, обнаружен сбой. Состояние должно отображаться в видимом для оператора месте.
В случае дистанционного управления каждое командное устройство должно ясно отображать части робота по персональному уходу, которыми управляет данное устройство. Система дистанционного управления должна быть спроектирована и построена так, чтобы воздействовать только на:
- соответствующие части робота;
- соответствующие функции.
Если используется световая индикация, то она должна соответствовать принципам эргономической конструкции для места ее установки, а ее цвет должен соответствовать требованиям МЭК 60204-1.
6.11.3 Метки
Устройства ручного управления должны иметь метки, ясно показывающие их функцию в соответствии с ИСО 7000.
6.11.4 Защита от непреднамеренных действий
Устройства ручного управления должны быть спроектированы и построены так, чтобы предотвратить непреднамеренные действия с помощью следующих средств:
a) когда робот по персональному уходу находится под ручным или дистанционным управлением, то инициация движения робота или изменение выбора локального управления должны производиться исключительно из одного источника;
b) с помощью использования правильно спроектированных устройств ручного управления, например, закрытых кнопок, последовательностей действий на сенсорных панелях, клавишных селекторных переключателей;
c) надлежащего размещения устройств ручного управления так, чтобы избежать случайного касания;
d) в соответствующих случаях должны быть использованы разные уровни доступа для предотвращения непреднамеренных действий или изменения установок.
Примечание - Если доступ производится не только "по личности", но и "по роли", то опытный оператор может использовать учетную запись пользователя с ограниченным доступом для повседневной работы и только при необходимости переключаться на привилегированную учетную запись.
7 Верификация и валидация
После завершения процесса снижения рисков значения всех характеристик робота по персональному уходу, связанные с безопасностью, должны быть проверены и для них должны быть проведены верификация и валидация. Это относится и к характеристикам систем управления, требования к которым установлены в разделе 6.
Все требования безопасности должны быть проверены в соответствии со связанными с ними стандартами по верификации.
Детали методов верификации и валидации, перечисленных в 5.1, заключаются в следующем:
- А (осмотр). Осмотр состояния робота по персональному уходу или оборудования и конструкций с использованием органов чувств человека без какого-либо специализированного контрольного оборудования: осмотр обычно выполняется визуально или на слух, когда робот находится в нерабочем состоянии;
- В (тесты образца изделия). Тестирование робота по персональному уходу или его оборудования при нормальных и ненормальных условиях: функциональные тесты (например, тестирование внесением неисправностей), циклические тесты (например, испытания на усталость), тесты в рабочих условиях (например, тестирование торможения);
- С (измерение). Сравнение реальных значений характеристик робота по персональному уходу с заданными пределами;
- D (наблюдение во время работы). Контроль (как в методе А) функций робота по персональному уходу или оборудования во время работы в нормальных и ненормальных условиях, например, с номинальной нагрузкой, в ситуациях с перегрузкой и в условиях соударений;
- Е (диагностика коммутационных схем). Структурированный анализ или контрольный просмотр проекта коммутационных схем (например, электрических, пневматических, гидравлических) и относящихся к ним спецификаций;
- F (проверка программного обеспечения). Структурированный анализ или контрольный просмотр проекта программного кода и относящихся к нему спецификаций, за этим должна последовать проверка кода или тестирование кода программного обеспечения;
- G (анализ общей оценки риска на основе задач). Структурированный анализ или контрольный просмотр анализа риска, оценки риска и сопутствующей документации;
- Н (проверка компоновочных чертежей и сопутствующих документов). Структурированный анализ и контрольный просмотр проекта компоновочных чертежей и сопутствующих документов.
8 Информация по использованию
8.1 Общие положения
Информация по использованию содержит информацию для правильного использования робота по персональному уходу. Она может предназначаться не только для пользователя, но и для персонала по техническому обслуживанию.
Инструкции и другие текстовые материалы, необходимые в соответствии с настоящим стандартом, должны быть написаны на официальном языке страны, в которую робот по персональному уходу должен быть продан.
Маркировки, обозначения и письменные предупреждения должны быть легко понимаемыми и однозначными, особенно в части функции (функций) робота, к которым они относятся. Легко понимаемые символы (пиктограммы) должны использоваться преимущественно перед письменными предупреждениями. Символы и пиктограммы должны использоваться только в том случае, если они будут понятны в культурной среде страны, в которую будет продан робот по персональному уходу.
Необходимо обратить внимание на тот факт, что в типичной внешней среде роботов по персональному уходу не все пользователи могут прочитать руководство с инструкциями или заметить и понять звуковые или визуальные предупреждающие сигналы. Это относится, но не ограничивается, к следующим ситуациям и группам пользователей:
a) дети, пожилые люди, умственно отсталые люди;
b) животные;
c) гости/посетители частных владений;
d) третьи стороны вблизи робота в общественных местах.
В тех случаях, когда ожидается, что информация по использованию не будет доступна для некоторых групп людей, это не должно вызывать дополнительных рисков.
Маркировки, установленные в настоящем стандарте, должны быть разборчивыми и долговечными.
Примечание - При рассмотрении срока службы маркировки необходимо принять во внимание эффект нормального использования. Например, маркировки, нанесенные краской или эмалью (но не стекловидной эмалью) на упаковку, которая будет часто протираться, не могут считаться долговечными.
За исключением информации, представленной в 8.2, информация по использованию может быть поставлена не только в печатном виде, но и на электронных носителях, если они легко доступны в регионе, куда должен быть продан робот по персональному уходу.
8.2 Маркировки или обозначения
Маркировки на роботе по персональному уходу должны быть ясно различимыми с внешней стороны робота или в случае необходимости после снятия верхнего кожуха.
По крайней мере наименование, торговая марка или опознавательный знак изготовителя или ответственного поставщика, а также модель или тип робота должны быть видны при нормальном использовании робота по персональному уходу. Если робот составляет единое целое со строением или другой конструкцией (например, мебелью), то данное требование применяется после того, как робот будет установлен в соответствии с инструкциями, поставляемыми вместе с роботом по персональному уходу.
Переключатели и элементы управления должны быть четко обозначены, чтобы не вызвать путаницы.
Следующие обозначения должны быть нанесены на роботе по персональному уходу:
- фирменное наименование и полный адрес изготовителя и в соответствующих случаях его авторизованного представителя;
- тип/обозначение робота по персональному уходу;
- любая юридически необходимая маркировка в случае необходимости;
- обозначение группы или типа робота по персональному уходу;
- сериальный номер, если имеется;
- год изготовления, то есть год, в котором был завершен процесс изготовления робота.
Следующая техническая информация должна быть нанесена на основную часть робота по персональному уходу:
- номинальное напряжение и номинальный диапазон в вольтах;
- обозначение природы питания, если не указана номинальная частота;
- номинальная входная мощность в ваттах или номинальный ток в амперах;
- номер IP, соответствующий степени защиты от поступления воды, отличный от IP Х0;
- обозначение МЭК 60417-5172 (2003-02) для роботов по персональному уходу с конструкцией, относящейся к классу II (по определению МЭК 60335-1);
- обозначение МЭК 60417-5180 (2003-02) для роботов по персональному уходу с конструкцией, относящейся к классу III (по определению МЭК 60335-1); данное обозначение не является необходимым для роботов по персональному уходу, которые питаются только от аккумуляторов (основные и вторичные аккумуляторы которых перезаряжаются вне робота по персональному уходу);
- масса (в килограммах) самого робота по персональному уходу и/или съемных частей, если они тяжелее 10 кг.
Единицы физических величин и их обозначения должны соответствовать Международной системе единиц СИ.
Робот по персональному уходу, имеющий диапазон значений номинального напряжения и который может работать без настройки в данном диапазоне, должен иметь маркировку нижнего и верхнего пределов диапазона номинальных напряжений.
Робот по персональному уходу, имеющий разные значения номинального напряжения и который должен быть настроен на использование при конкретном напряжении пользователем или установщиком, должен иметь маркировку разных значений номинального напряжения.
Для робота по персональному уходу, имеющему маркировку более одного номинального напряжения или одного или нескольких диапазонов номинального напряжения, должны быть нанесены обозначения номинальной входной мощности или номинального тока для каждого из этих напряжений или диапазонов. Однако если разница между границами диапазона номинального напряжения не превышает 10% среднего арифметического значения данного диапазона, то маркировка номинальной входной мощности или номинального тока может относиться к среднему арифметическому значению диапазона. Верхняя и нижняя границы номинальной входной мощности или номинального тока должны быть нанесены на роботе по персональному уходу так, чтобы была понятна связь между ними и напряжением.
Если для маркировки используются символы, то они должны соответствовать требованиям МЭК 60417-1, МЭК 60204-1 или ИСО 7010; некоторые примеры приведены в приложении Е.
Примечание - Следует отметить, что существует некоторое несоответствие между этими стандартами в отношении значения обозначений. Например, обозначение по МЭК 60417-5007 (DB:2002-10) означает только "ON (ВКЛ)" (питания), а в МЭК 60204-1 то же обозначение означает "START (ПУСК) или ON (ВКЛ)".
При обозначении переключателей их разные положения на роботах по персональному уходу, связанные с питающей электрической сетью, и разные положения органов управления на всех роботах по персональному уходу должны быть обозначены цифрами, буквами или другими визуальными средствами. Данное требование также применяется к переключателям, входящим в состав командного устройства.
Если для обозначения разных положений используются цифры, то положение "выключено" должно быть обозначено цифрой "0", а положение, соответствующее более высокому значению (например, выходной величины, входной величины, скорости или охлаждающего эффекта), должно быть обозначено цифрой, имеющей большее значение.
Цифра "0" не должна использоваться для других обозначений, если только она не размещена и связана с другими числами так, что невозможно спутать данное обозначение с обозначением положения "выключено".
В сигнальных и предупреждающих устройствах могут быть использованы визуальные сигналы (например, мигающий свет) и звуковые сигналы (например, сирены) для предупреждения о надвигающейся опасной ситуации (например, робот по персональному уходу начинает движение или превысил скорость). Данные сигналы могут также быть использованы для предупреждения оператора перед переключением автоматических мер защиты.
Данные сигналы должны быть:
a) недвусмысленными и ясно различимыми от всех других используемых сигналов;
b) ясно распознаваемыми для оператора и других людей.
Предупреждающие устройства должны быть спроектированы и размещены так, чтобы их проверка была легкой. В информации по использованию должна быть описана необходимая регулярная проверка предупреждающих устройств.
Внимание разработчиков должно быть обращено на возможность "перегрузки пользователя", что может привести к слишком большому числу сигналов и вызвать путаницу, которая снизит эффективность предупреждающих устройств.
Примечание - При этом часто необходимы консультации с пользователями.
Для сменных защитных устройств, если соответствие настоящему стандарту зависит от работы сменных термочувствительных или плавких перемычек, числовое обозначение или другие средства для идентификации данной перемычки должны быть нанесены в таком месте, которое хорошо видно при демонтаже робота по персональному уходу для замены данной перемычки.
Примечание - Маркировка перемычки разрешена, если она остается разборчивой, после того как перемычка сработала.
Данное требование не применяют к перемычкам, которые могут быть заменены только вместе с частью робота по персональному уходу.
8.3 Руководство пользователя
Руководство пользователя должно поставляться вместе с роботом по персональному уходу, чтобы он мог использоваться по назначению. Руководство пользователя должно содержать среди прочего следующее:
a) подробное описание робота по персональному уходу;
b) исчерпывающий диапазон применений, для которых предназначен робот по персональному уходу, включая запрещенные применения при их наличии, с учетом изменений, вносимых в оригинальный робот по персональному уходу;
c) командные устройства;
d) установки и настройки;
e) режимы и средства для остановки (особенно аварийной остановки);
f) конкретные риски, включая остаточные риски, которые могут быть вызваны некоторыми функциями, использованием некоторых настроек, и конкретные меры безопасности, необходимые для таких функций;
g) возможное неправильное использование и запрещенные применения, например, игра детей с роботом по персональному уходу;
h) идентификация и локализация отказов, возврат в исходное состояние и перезапуск после вмешательства;
i) что нужно делать в случае повреждения или поломки.
Примечание - Инструкции по использованию могут быть нанесены на робот по персональному уходу, если они будут видны при нормальном использовании.
Если необходимо принять меры предосторожности во время технического обслуживания пользователем, то должно быть приведено их описание.
Инструкции для роботов по персональному уходу, оснащенных аккумуляторами, предназначенными для их замены пользователем, должны содержать следующее:
- тип аккумулятора;
- правильную процедуру и оборудование для зарядки;
- способ замены аккумулятора;
- подробности, относящиеся к безопасной утилизации использованных аккумуляторов;
- предупреждение об использовании неперезаряжаемых аккумуляторов;
- предупреждение о неправильном обращении с аккумуляторами (например, полный разряд литиевых аккумуляторов);
- что делать с протекающими аккумуляторами.
В случае необходимости принятия мер предосторожности во время установки робота по персональному уходу должны быть приведены соответствующие данные. Если установка должна быть проведена только персоналом по техобслуживанию, то данная информация должна быть приведена в руководстве по техническому обслуживанию.
Инструкция по использованию должна содержать информацию относительно транспортировки, перемещения и хранения робота по персональному уходу, например:
- величину массы (или масс), положение центра (или центров) тяжести;
- обозначения для перемещения (например, чертеж, изображающий контактные точки для подъемного оборудования);
- условия окружающей среды при хранении.
Должна быть приведена информация, касающаяся демонтажа, вывода из работы и утилизации робота по персональному уходу.
8.4 Руководство по техническому обслуживанию
Руководство по техническому обслуживанию должно содержать инструкции по техническому обслуживанию и дозаправке робота по персональному уходу, которые требуют определенных технических знаний или конкретных навыков и, следовательно, должны выполняться исключительно квалифицированными специалистами (например, персоналом по техобслуживанию, специалистами).
Инструкции по техническому обслуживанию, предназначенные для квалифицированных специалистов, и инструкции по техническому обслуживанию, предназначенные для неквалифицированных пользователей, должны быть явно разделены друг от друга.
Инструкции по техническому обслуживанию должны содержать достаточную информацию для поддержания необходимого уровня безопасности, качества и функциональности робота по персональному уходу.
Информация, поставляемая вместе с роботом по персональному уходу, должна содержать там, где это необходимо, следующее:
a) ясное и подробное описание оборудования, установки, монтажа и подключения к источнику (источникам) питания;
b) требования к источнику питания;
c) информацию о физической внешней среде в случае необходимости (например, освещение, вибрация, уровни шума, загрязнения атмосферы);
d) информацию (при необходимости) о:
- программировании, необходимом для установки, использования или технического обслуживания робота по персональному уходу;
- последовательности действий;
- частоте осмотра;
- частоте и способе функционального тестирования;
- руководстве по настройке, обслуживанию и ремонту, особенно для защитных устройств и цепей;
- рекомендуемому списку запасных частей;
- списке приложенных инструментов;
e) описание (включая схемы соединений) мер обеспечения безопасности, функций блокировки и предохранительных приспособлений от опасностей, в частности для нескольких роботов по персональному уходу, работающих скоординированно;
f) описание средств защиты и средств, поставляемых на случай необходимости приостановить защиту (например, для настройки или технического обслуживания);
g) инструкции по процедурам закрепления робота для безопасного технического обслуживания;
h) информацию о токах нагрузки, пиковых пусковых токах и допустимых падениях напряжения, где это необходимо;
i) информацию об остаточных рисках вследствие принятых мер защиты.
Приложение А
(справочное)
Список существенных опасностей для роботов по персональному уходу
Одним из важных шагов при выполнении общей оценки рисков, как установлено в ИСО 12100, является анализ идентификации опасностей.
Данная форма анализа является систематической процедурой для идентификации потенциальных опасностей, которые могут быть вызваны системой или машиной, основанной на некоторых аспектах ее общей спецификации. Систематические процедуры могут включать анализ функциональных спецификаций или интерфейсов, опасностей, изученных на уже созданных подобных изделиях, или они могут использовать всеобъемлющие множества/списки типовых видов опасностей.
Имея широкий диапазон возможных применений роботов по персональному уходу, практически невозможно создать единый список опасностей, который бы полностью охватил все опасности, относящиеся к данным роботам. Однако можно создать минимальный список опасностей, которые относятся ко всем применениям роботов по персональному уходу.
Для всех роботов по персональному уходу, к которым относится настоящий стандарт, в таблице А.1 представлен объединенный список опасностей в качестве рекомендации по минимальному охвату опасностей, которые должны быть рассмотрены при любом анализе идентификации опасностей. Результаты конкретной методологии идентификации опасностей должны быть сравнены с данным списком. Если окажется, что эти результаты не охватывают все опасности из данного списка, то результаты идентификации опасностей должны быть расширены и дополнены, чтобы охватить оставшиеся опасности из списка.
Таблица А.1 - Опасности для роботов по персональному уходу
N | Вид опасности | Анализ опасности | Раздел, связанный с требованием | Комментарии | |
Опасность | Потенциальное последствие | безопасности | |||
1 | Опасности при зарядке аккумуляторов | Перегрузка аккумулятора | Пожар, выделение опасных газов и веществ | 5.2 | |
2 | Зарядка сильно разряженных аккумуляторов | Пожар, выделение опасных газов и веществ | 5.2 | ||
3 | Контакт с оголенными клеммами аккумуляторов | Электрический шок | 5.2 | ||
4 | Короткое замыкание аккумулятора | Пожар, выделение опасных газов и веществ | 5.2 | ||
5 | Опасности накопления и подачи энергии | Опасный контакт с источниками большой электрической энергии | Электрический шок, ожоги | 5.3.1 | |
6 | Электрические компоненты/детали оказываются под напряжением в неисправных состояниях | Электрический шок | 5.3.1 | ||
7 | Опасный контакт с источниками большой механической энергии | Раздавливание, порезы, защемление, ожоги | 5.3.1 | К высокоэнергетическим механическим частям относятся вращающиеся/ быстро движущиеся части, гидравлика или пневматика высокого давления, узлы, сжигающие топливо | |
8 | Опасный контакт с источниками большой пневматической энергии | Раздавливание, порезы, защемление, впрыски | 5.3.1 | ||
9 | Опасный контакт с источниками большой гидравлической энергии | Раздавливание, порезы, защемление, впрыски | 5.3.1 | ||
10 | Опасный контакт с источниками большой химической энергии | Ожоги, раздражения | 5.3.1 | ||
11 | Опасный контакт с источниками высокой температуры/ большой тепловой энергии | Ожоги | 5.3.1 | ||
12 | Опасности накопления и подачи энергии | Неконтролируемое высвобождение накопленной энергии (быстрый разряд, взрыв) | Пожар, ожоговые травмы, раздавливание, проколы, порезы | 5.3.2 | Накопление энергии может происходить в пневматических и гидравлических аккумуляторах давления, конденсаторах, аккумуляторах, пружинах, противовесах, маховиках |
13 | Сбои по питанию | Раздавливание, защемление, падение груза, выбег | 5.3.3 | ||
14 | Непреднамеренное выключение | Раздавливание, защемление, падение груза | 5.3.3 | ||
15 | Перегрузка по питанию | Пожар | 5.3.3 | ||
16 | Частичный отказ питания (провалы напряжения) | Прочие опасности | 5.3.3 | ||
17 | Опасный электростатический разряд | Электрический шок | 5.5.1 | ||
18 | Опасности, связанные с запуском робота | Непреднамеренный/ | Прочие опасности | 5.4 | |
19 | Опасные действия, предпринятые при запуске или перезапуске робота | Прочие опасности | 5.4 | ||
20 | Опасности, связанные с формой робота | Острые края | Порезы, отрезания, проколы, ссадины | 5.6 | |
21 | Отверстия или щели между движущимися частями | Раздавливание, защемление, порезы, отрезания, ссадины | 5.6 | ||
22 | Опасное отделение/падение деталей | Раздавливание, защемление | 5.6 | ||
23 | Опасный профиль формы робота при столкновениях | Ударные травмы, раздавливание, защемление, порезы | 5.6 | ||
24 | Опасности, связанные с шумом | Опасные уровни акустического шума | Потеря слуха, стресс, дискомфорт, потеря устойчивости, потеря сознания | 5.7.1 | |
25 | Робот издает опасные ультразвуковые излучения | Потеря слуха, стресс, дискомфорт, потеря устойчивости, потеря сознания | 5.7.1 | ||
26 | Опасности, связанные с отсутствием информации о роботе | Отсутствие шума/беззвучная работа | Столкновения с людьми (вызывающие травмы от ударов) или другими связанными с безопасностью препятствиями | 5.14 | Данная опасность должна также рассматриваться, если робот по персональному уходу может иметь пользователей с проблемами со слухом, которые могут не заметить робота, даже если он издает шум при работе. |
27 | Опасная вибрация | Вредные уровни вибрации | Воспаление сухожилий, боли в спине, дискомфорт, невроз, артрит, боли при движениях и другие травмы из-за вибрации | 5.7.2 | |
28 | Сниженная читаемость на дисплеях из-за вибрации | Опасные события из-за неправильных действий пользователя или потери пользователем управления | 5.7.2 | ||
29 | Опасные вещества и жидкости | Контакт с выпускаемыми роботом по персональному уходу опасными веществами и жидкостями (например, с гидравлической жидкостью) | Ожоги, раздражения, сенсибилизация | 5.7.3 | |
30 | Летучие сольвенты, газы, испускаемые роботом по персональному уходу | Сенсибилизация, раздражения, удушье, слепота | 5.7.3 | ||
31 | Опасные вещества и жидкости | Аллергическая реакция на контакт с поверхностью робота | Раздражение, сенсибилизация | 5.7.3 | |
32 | Опасные условия внешней среды | Высокий уровень пыли | Пожар, прочие опасности | 5.15 | Необходимо рассмотреть, если робот по персональному уходу предназначен для работы: |
33 | Песок | Ободранные поверхности, образующие острые кромки; заедание подвижных частей из-за небезопасных положений/ | 5.15 | Необходимо рассмотреть, если робот по персональному уходу предназначен для работы на открытом воздухе | |
34 | Воздействие на робот по персональному уходу снега, льда | Заедание подвижных частей, опасности короткого замыкания, неправильные действия из-за ошибок сенсоров, прочие опасности | 5.15 | Необходимо рассмотреть, если робот по персональному уходу предназначен для работы в зимнее время и в холодных регионах | |
35 | Воздействие на робот по персональному уходу воды и влаги | Короткие замыкания, вызывающие функциональные сбои, пожары, потери мощности | 5.15 | Необходимо рассмотреть, если робот по персональному уходу предназначен для работы на открытом воздухе или около резервуаров или источников воды или брызг | |
36 | Опасные условия внешней среды | Воздействие на робот соленой атмосферы или брызг соленой воды (например, в морской или прибрежной среде) | Конструктивные отказы, прочие опасности из-за функциональных отказов, вызванных коррозией, отказы аккумуляторов/ | 5.15 | Необходимо рассмотреть, если робот по персональному уходу предназначен для работы на открытом воздухе вблизи океанов, морей и других резервуаров соленой воды (или на борту катеров или кораблей) |
37 | Экстремальные температуры | Горячие поверхности | Ожоги, стресс, дискомфорт | 5.7.4 | |
38 | Холодные поверхности | Ожоги, обморожения, стресс, дискомфорт | 5.7.4 | ||
39 | Сниженная читаемость на дисплеях | Опасные события из-за неправильных действий пользователя или потери пользователем управления | 5.7.4 | ||
40 | Опасное неионизирующее излучение | Робот испускает вредное некогерентное оптическое излучение | Ожоги, травмы глаз | 5.7.5 | |
41 | Робот испускает вредное когерентное оптическое (лазерное) излучение | Травмы глаз (слепые пятна, полная слепота) | 5.7.5 | Не применяется для роботов для оказания физической помощи закрепляемого типа | |
42 | Робот излучает опасные уровни ЭМИ | Опасное воздействие на медицинские имплантаты/ | Находится вне области применения настоящего стандарта. За соответствующими требованиями необходимо обратиться к стандартам по ЭМС (например, к комплексу ИСО 61000) | ||
43 | Опасное ионизирующее излучение | Робот излучает опасные уровни ионизирующего излучения | Радиационные болезни, воздействие на репродуктивные функции, мутация | 5.7.6 | Источники ионизирующего излучения не должны применяться на роботах по персональному уходу, если только нет другой альтернативы для конкретного назначения робота. |
44 | Опасности ЭМИ/ЭМС | Потеря функции обеспечения безопасности из-за внешнего ЭМИ | Должно быть определено для каждой функции | 5.8 | Необходимо рассмотреть для всех функций безопасности робота по персональному уходу |
45 | Неадекватное выполнение функции из-за внешнего ЭМИ | Должно быть определено для каждой функции | 5.8 | Необходимо рассмотреть для всех функций робота по персональному уходу(как прикладных/ сервисных функций, так и функций безопасности). | |
46 | Опасные движения робота по персональному уходу, вызванные внешним ЭМИ (например, выбеги, непреднамеренные движения манипулятора) | Раздавливание, защемление, удары, столкновения, порезы, отрезания | 5.8 | ||
47 | Небезопасное состояние робота, вызванное внешним ЭМИ | Раздавливание, защемление, удары, порезы, отрезания, пожар, ожоги | 5.8 | ||
48 | Опасности, связанные со стрессом, позами и использованием | Для работы робота требуются вызывающие стресс позы | Костно-мышечные нарушения | 5.9.2 | |
49 | Опасности, связанные со стрессом, позами и использованием | Условия эксплуатации, вызывающие дискомфорт | Усталость, мышечные напряжения или воспаления | 5.9.2 | Усталость может быть вызвана постоянным воздействием некомфортных уровней звука/шума, света, тепла или других факторов |
50 | Неправильные предположения о размерах тела пользователя | Положения тела, вызывающие стресс, усталость пользователя, мышечные травмы/нарушения | 5.9 | ||
51 | Плохой дизайн пользовательского интерфейса и/или расположения индикаторов и устройств визуального отображения | Дискомфорт из-за непонимания пользователем робота по персональному уходу | 5.9.3 | ||
52 | Медленная реакция пользователя в опасных ситуациях | 5.9.3 | Необходимо рассмотреть для всех функций обеспечения безопасности, требующих своевременных действий пользователя с использованием пользовательского интерфейса | ||
53 | Частые ошибочные сигналы тревоги, заставляющие пользователя игнорировать/ выключать их, что приводит к неправильным реакциям на аварийные ситуации | 5.9.3 | |||
54 | Плохая взаимосвязь между управлением и отображением, вызывающая неправильные/ | 5.9.3 | Если у пользователя имеет место ухудшающееся состояние, то необходимо также рассмотреть характеристики изменения состояния | ||
55 | Плохая видимость робота по персональному уходу | Возникновение прочих опасностей вследствие ошибок человека | 5.9 | ||
56 | Опасности, связанные с движениями робота | Механическая неустойчивость (опрокидывание, падение, чрезмерный наклон) | Раздавливание, защемление, падение грузов | 5.10.2 | |
57 | Механическая неустойчивость - опрокидывание при работе с грузами | Раздавливание, защемление, падение грузов | 5.10.2 | Усталость может быть вызвана постоянным воздействием некомфортных уровней звука/шума, света, тепла или других факторов | |
58 | Неустойчивость движения - опрокидывание при основном способе передвижения | Раздавливание, защемление, порезы/отрезания, падение грузов | 5.10.3 | К основным способам передвижения относятся: | |
59 | Неустойчивость движения - выбег при основном способе передвижения | Столкновения, падение грузов, повреждение внешней среды | 5.10.3 | ||
60 | Неустойчивость движения - опрокидывание из-за неправильного расположения пассажира | Раздавливание, защемление, порезы/отрезания, падение грузов | 5.10.3 | Применимо только к роботам для перевозки человека | |
61 | Неустойчивость при переносе грузов - падение связанных с безопасностью объектов при выполнении заданий | Повреждение внешней среды, высвобождение вредных веществ, ожоги (для горячих жидкостей), порезы, отрезания (для острых объектов) | 5.10.4 | ||
62 | Неустойчивость при столкновениях - опрокидывание или перевертывание в результате столкновения | Раздавливание, защемление, порезы/отрезания, падение грузов | 5.10.5 | Не применимо к роботам для оказания физической помощи закрепляемого типа | |
63 | Опасности, связанные с движениями робота | Неустойчивость при столкновениях - выбег в результате столкновения | Столкновение, падение грузов, повреждение внешней среды | 5.10.5 | Не применимо к роботам для оказания физической помощи закрепляемого типа |
64 | Отделение частей корпуса в результате столкновения | Раздавливание, защемление | 5.10.5 | ||
65 | Неустойчивость при присоединении робота для оказания физической помощи ограничивающего типа | Раздавливание, защемление, травмы от удара | 5.10.6 | Применимо только к роботам для оказания физической помощи закрепляемого типа | |
66 | Неустойчивость при отсоединении робота для оказания физической помощи ограничивающего типа | Раздавливание, защемление, травмы от удара | 5.10.6 | Применимо только к роботам для оказания физической помощи закрепляемого типа | |
67 | Опрокидывание при посадке/высадке пассажира | Падение и травмирование пассажира, раздавливание, защемление | 5.10.7 | Применимо только к роботам для перевозки человека | |
68 | Выбег при посадке/высадке пассажира | Падение и травмирование пассажира, раздавливание, защемление | 5.10.7 | Применимо только к роботам для перевозки человека | |
69 | Столкновение со связанными с безопасностью объектами | Столкновение со связанными с безопасностью объектами | Травмы от удара, порезы, отрезания | 5.10.8 | Не применимо к роботам для оказания физической помощи закрепляемого типа |
70 | Столкновение с домашними животными | Травмирование (или смерть) животного, паника у животного, последствием которой может быть травмирование людей или повреждение внешней среды | 5.10.8 | Реакциями животных могут быть: | |
71 | Столкновение со связанными с безопасностью объектами | Столкновение с другими роботами | Раздавливание, защемление, падение грузов | 5.10.8 | Не применимо к роботам для оказания физической помощи закрепляемого типа |
72 | Столкновение с хрупкими связанными с безопасностью объектами | Повреждение внешней среды, падение грузов, высвобождение вредных веществ, ожоги (для горячих жидкостей), порезы/отрезания (для острых связанных с безопасностью объектов) | 5.10.8 | Не применимо к роботам для оказания физической помощи закрепляемого типа | |
73 | Столкновение со стенами, постоянными/ | Повреждение внешней среды, падение грузов, высвобождение вредных веществ, ожоги (для горячих жидкостей), порезы/отрезания (для острых связанных с безопасностью объектов) | 5.10.8 | Не применимо к роботам для оказания физической помощи закрепляемого типа | |
74 | Опасный физический контакт при взаимодействии человека с роботом | Невозможность выявить связанные с безопасностью объекты в рабочей зоне | Столкновение со связанными с безопасностью объектами | 5.10.9 | Необходимо рассмотреть для всех функций и задач (связанных с обслуживанием/ |
75 | Опасные уровни физической реакции при тактильном взаимодействии | Порезы/отрезания, раздавливание, защемление | 5.10.9 | Необходимо рассмотреть для всех планируемых задач, связанных с тактильным взаимодействием человека с роботом. | |
- крутящий момент; | |||||
76 | Тактильное взаимодействие с частями робота, не предназначенными для этого | Травмы от удара, защемление, раздавливание | 5.10.9 | ||
77 | Недостаточный ресурс прочности | Отказ деталей робота из-за недостаточного ресурса прочности | Прочие опасности | 5.11 | Необходимо рассмотреть для всех функций и задач. |
78 | Опасные автономные действия | Опасное действие при выполнении задания | Прочие опасности | 5.12 | Анализ выявления функциональных опасностей необходим для всех функций и задач роботов по персональному уходу (как связанных с безопасностью, так и связанных с обслуживанием/ |
79 | Опасный контакт с движущимися частями | Опасный контакт с движущимися механическими частями | Затягивание, раздавливание, защемление, порезы | 5.13 | |
80 | Опасности, связанные с ошибками определения местоположения и навигации | Ошибки определения местоположения, вызывающие неожиданные перемещения робота по персональному уходу | Раздавливание, защемление, травмы от удара, падение грузов | 5.16 | |
81 | Ошибки определения местоположения, вызывающие вход в запрещенные зоны | Столкновения, раздавливание, защемление, травмы от удара, падение грузов | 5.16 | ||
82 | Ошибки определения местоположения, вызывающие механическую неустойчивость | Опрокидывание, раздавливание, защемление, падение грузов | 5.16 | ||
83 | Ошибки навигации, препятствующие достижению заданных мест или обходу связанных с безопасностью препятствий | Столкновения, раздавливание, защемление, травмы от удара, повреждение внешней среды | 5.16 | ||
84 | Другие виды опасности | Плохие/несоответствующие инструкции и обучающий материал | Опасные события, вызванные ошибками или неправильными действиями пользователя | Все разделы | |
85 | Сниженные возможности пользователя по управлению роботом из-за одежды для открытого воздуха, включая перчатки, шляпы, солнечные очки, ботинки | Сниженное восприятие, менее точное управление, ведущие к опасным событиям, вызванным ошибками или неправильными действиями пользователя | Все разделы |
Приложение В
(справочное)
Примеры рабочих пространств для роботов по персональному уходу
В.1 Мобильный автономный робот для перевозки человека
Робот для перевозки человека весом 200 кг перемещается автономно по музею. Стены комнат определяют максимальное пространство. План полов в рабочем пространстве робота подготовлен на основе плана полов музея. Робот имеет рабочий объем и подвижные, вытягивающиеся звенья руки робота, которые не должны касаться стен. Это определяет ограниченное пространство. См. рисунок В.1.
|
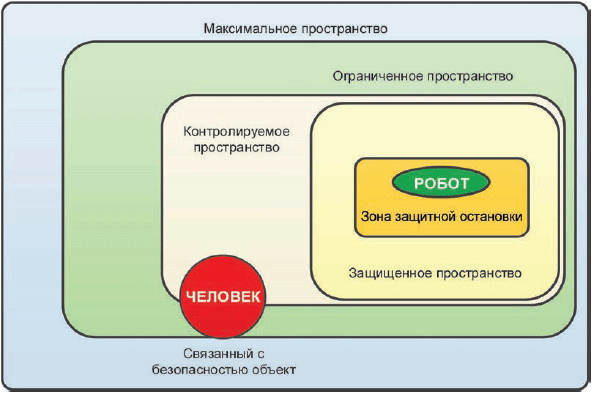
Рисунок В.1 - Рабочие пространства автономного робота для перевозки человека
a) Роботу разрешено находиться только в центральной части комнат и дверных проемов. Пока робот перемещается автономно, он осматривает окружающую среду с помощью бортовых сенсоров и с помощью установленных в музее сенсоров, определяющих динамическую контролируемую среду.
b) Пока робот перемещается в комнате, он динамически модифицирует свое защищенное пространство и пространство защитной остановки. Как только в защищенное пространство попадает связанный с безопасностью объект, робот снижает скорость в зависимости от реальных скоростей робота и связанных с безопасностью объектов, находящихся в окружающей его среде, поддерживая таким образом безопасные границы до любого связанного с безопасностью объекта.
c) Если связанный с безопасностью объект входит в пространство защитной остановки, то робот переходит в состояние защитной остановки. Для данного типа робота важно, чтобы контролируемое пространство перекрывало и охватывало по крайней мере защищенное пространство для обеспечения того, что робот имеет всю необходимую информацию для планирования своих движений так, чтобы не возникало столкновений или опасных ситуаций.
d) Если связанный с безопасностью объект неожиданно появляется в защищенном пространстве робота, то планировщик траектории движения робота выдает роботу команду немедленно реагировать на это, рассчитывая новую траекторию вокруг движущегося связанного с безопасностью объекта или останавливая робот в зависимости от их относительных скоростей.
В.2 Робот по персональному уходу с манипулятором (мобильный обслуживающий робот)
Данный случай сравним с промышленным применением робота. Максимальное пространство определено максимальным вытягиванием руки стационарного робота, и робот должен взаимодействовать с человеком в своем максимальном пространстве.
Для данного робота по персональному уходу можно выделить два случая:
a) Работа в режиме ручного управления. Робот полностью управляется вручную так, что оператор имеет полный контроль и управляет всеми движениями робота. Никаких сенсоров не требуется, и никаких определений пространств не используется.
b) Работа в режиме полуавтоматического управления: оператор только указывает, что должно быть выполнено некоторое действие. Робот использует сенсоры и некоторую форму планирования траектории для выполнения заданного действия. Оператор может управлять связанными с безопасностью функциями, но его реакция может запаздывать. Робот должен использовать сенсоры для идентификации цели (которой может быть человек) и положения, в котором следует выполнить поставленную задачу. Принимающий человек находится в пределах максимального пространства.
Защищенное пространство определено в той же области, где возможно безопасное взаимодействие между связанным с безопасностью объектом и роботом на пониженной (безопасной) скорости. Сенсоры активно контролируют позицию связанного с безопасностью объекта и робота. Система управления может адаптировать защищенное пространство и пространство защитной остановки, если связанный с безопасностью объект движется и робот оказывается в пространстве защитной остановки, то робот переходит в состояние защитной остановки. См. рисунок В.2.
|
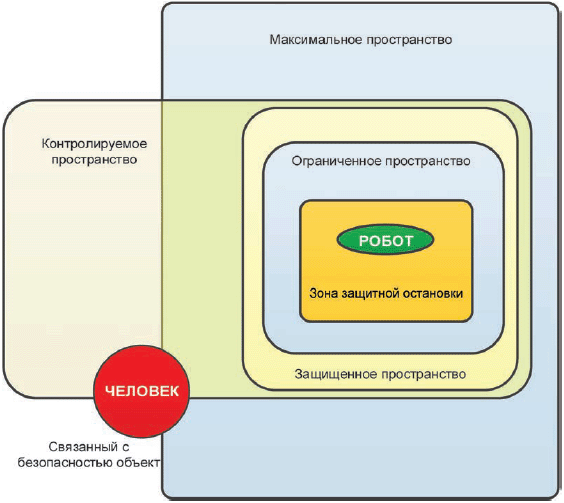
Рисунок В.2 - Рабочие пространства робота по персональному уходу с манипулятором
В.3 Экзоскелетон (робот для оказания физической помощи)
Здоровый человек использует экзоскелетон для уменьшения своей физической рабочей нагрузки.
Можно выделить два случая:
а) Работа в режиме ручного управления: пользователь экзоскелетона управляет всеми движениями робота (он его надевает как скафандр). При этом никаких сенсоров может не потребоваться.
b) Робототехнический скафандр оснащен сенсорами, охватывающими контролируемое пространство, например, чтобы предотвратить ситуацию, когда человек, надевший экзоскелетон, случайно пойдет вниз по ступеням (связанное с безопасностью препятствие). Скафандр может контролировать/влиять на оператора. Не существует максимального пространства, определенного для данного применения, так как человек, несущий на себе робота, определяет, куда идти. Расположение запрещенного пространства (ступени и другие связанные с безопасностью препятствия) динамически модифицируется системой управления робота при его движении. В результате защищенное пространство и пространство защитной остановки постоянно перерассчитываются при движении оператора и робота. Если связанный с безопасностью объект попадает в защищенное пространство, то система управления подает сигнал оператору и снижает свою физическую помощь так, чтобы оператор безопасно снизил свою скорость. Если робот входит в зону защитной остановки, то он безопасно останавливается, позволяя оператору двигаться только в другом направлении, а не по ступеням. См. рисунок В.3.
|
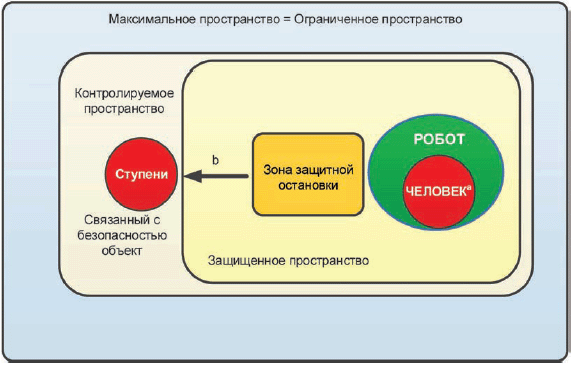
а - связанный с безопасностью объект;
b - мгновенное направление движения
Рисунок В.3 - Рабочие пространства робота для оказания физической помощи
Приложение С
(справочное)
Пример реализации защищенного пространства
В данном приложении приведен пример применения робота по персональному уходу, основанный на определениях 3.18.1-3.18.5 связанных с безопасностью пространств и рисунке 1 с типичными защитными мерами, принимаемыми для достижения целей сосуществования человека и робота. Пример касается предотвращения столкновений в соответствии с 5.10.8, и в нем применены те же самые определения связанных с безопасностью пространств.
На рисунке С.1 показан мобильный робот по персональному уходу с манипулятором, который обладает способностью предотвращения столкновений с препятствиями, используя связанное с безопасностью управление скоростью. В данном примере рассматривается относительная скорость. Учитывая скорость приближения объекта , можно вычислить скорость робота
, исходя из угловой скорости
и составляющей скорости робота
в направлении приближения к связанному с безопасностью объекту, которая удовлетворяет уравнению (С.1):
![]() , when
, when ![]() , * (С.1)
, * (С.1)
________________
* Формула соответствуют оригиналу. - .
где Т - время отклика системы, необходимое для определения скорости связанного с безопасностью препятствия и снижения скорости робота;
d - расстояние до связанного с безопасностью препятствия от центра робота;
- минимальное расстояние, вычисляемое в соответствии с 5.10.8.3, перечисление а).
Необходимо отметить, что если робот управляется так, чтобы строго поддерживать расстояние до связанного с безопасностью объекта, то он должен дать задний ход, если связанный с безопасностью объект приближается к нему с относительной скоростью, удовлетворяющей следующему условию:
![]() .
.
Наконец, когда связанный с безопасностью объект приблизится к роботу на расстояние ![]() , робот управляется так, чтобы сделать защитную остановку. Движение как робота, так и связанного с безопасностью препятствия может быть представлено в векторной форме. Более того, нет необходимости говорить, что в защищенном пространстве скорость робота должна снижаться до заранее заданного небольшого значения
, робот управляется так, чтобы сделать защитную остановку. Движение как робота, так и связанного с безопасностью препятствия может быть представлено в векторной форме. Более того, нет необходимости говорить, что в защищенном пространстве скорость робота должна снижаться до заранее заданного небольшого значения , если робот не сможет успешно определить скорость связанного с безопасностью препятствия.
Скорость робота и расстояние до связанного с безопасностью препятствия при включенной защите по обходу препятствия показаны на рисунке С.2. Можно изменить v в соответствии с уравнением (С.1), если ![]() . Замедление на интервале
. Замедление на интервале может быть нелинейным и может изменяться в зависимости от условий окружающей среды, таких как температура и влажность. В случае линейного замедления безопасная остановка произойдет после прохождения дополнительного расстояния, равного
![]() .
.
|
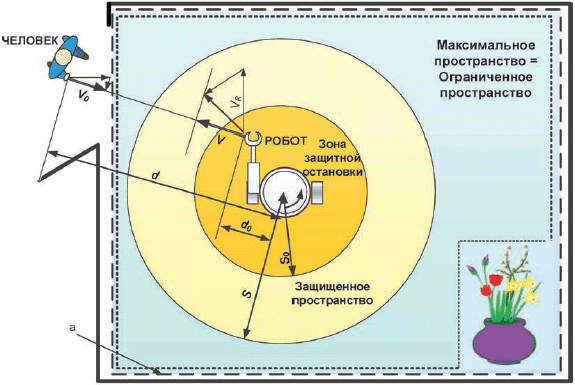
а - максимальное пространство
Рисунок С.1 - Пример применения робота по персональному уходу с манипулятором на мобильной платформе
|
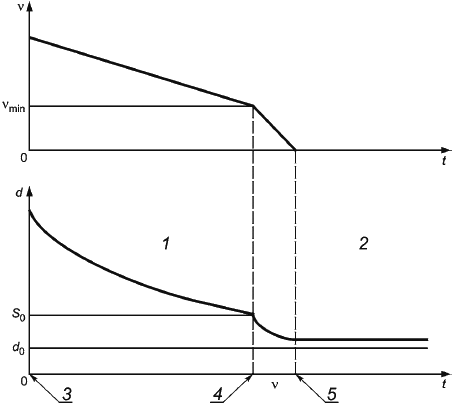
1 - защищенное пространство; 2 - пространство защитной остановки; 3 - активация защиты; 4 - начало торможения; 5 - безопасная остановка
Рисунок С.2 - Безопасное расстояние и максимальная относительная скорость в защищенном пространстве
Приложение D
(справочное)
Примеры функциональных задач роботов по персональному уходу
В таблицах D.1-D.3 приведены примеры функциональных задач роботов по персональному уходу.
Таблица D.1 - Мобильные обслуживающие роботы
Класс мобильного обслуживающего робота | Функциональные задачи, которые должны быть выполнены |
Мобильный обслуживающий робот в домашней обстановке или в общественных зданиях | Передвижение в домашних условиях или в общественных зданиях с предотвращением столкновений со стационарными и подвижными препятствиями, |
| связанными с безопасностью. Может быть реализовано перемещение между позициями с полным охватом обслуживаемого пространства. |
Таблица D.2 - Роботы для оказания физической помощи
Класс робота для оказания физической помощи | Функциональные задачи, которые должны быть выполнены |
Устройство, помогающее движению ног
| Применение кооперативного управления к бедрам пользователя для управления походкой и обеспечения комфортабельной ходьбы |
Устройство, поддерживающее вес тела
| Снижение нагрузки на голень, бедро, колени и лодыжки при стоянии или ходьбе с помощью поддержки части веса тела пользователя |
Носимый робот-экзоскелетон
| Физическая поддержка человека и манипуляционных частей тела с помощью непосредственного взаимодействия и креплений к человеку, например, ремней или фиксаторов. |
Носимый робот
| Обеспечивает фиксацию непосредственно на человеке без хирургического вмешательства, например, с помощью ремней и фиксаторов, предоставляя возможность непосредственного взаимодействия для выполнения разнообразных манипуляций. |
Робот для оказания физической помощи незакрепляемого типа
| Помогает пожилым/усталым людям вставать с и садиться на стул, кровать и т.п. |
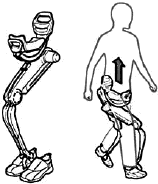
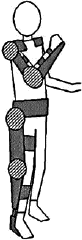
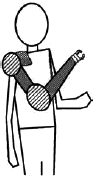

Таблица D.3 - Роботы для перевозки человека
Класс робота для перевозки человека | Функциональные задачи, которые должны быть выполнены |
Транспортное средство с человеком, стоящим на опорах для ног
| Перевозит человека из одного места в другое по ровной поверхности в автономном или ручном режиме, используя колесную мобильную платформу. |
Шагающее пассажирское транспортное средство
| Перевозит человека из одного места в другое по любым трехмерным поверхностям в автономном или ручном режиме, используя шагающую мобильную платформу |
Транспортное средство, пассажир которого сидит на моноцикле
| Перевозит человека из одного места в другое по ровной поверхности в автономном или ручном режиме, используя колесную мобильную платформу. |
Колесное пассажирское транспортное средство
| Перевозит человека из одного места в другое по ровной поверхности в автономном или ручном режиме, используя колесную мобильную платформу |
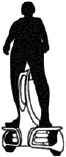
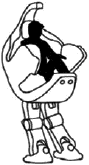
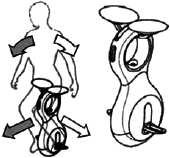
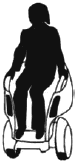
Приложение Е
(справочное)
Примеры маркировок для роботов по персональному уходу
В таблице Е.1 приведены примеры маркировок для роботов по персональному уходу.
Таблица Е.1 - Примеры маркировок для обеспечения безопасности и других видов для роботов по персональному уходу
ИСО 7010-W001 | ИСО 7010-W08 | ИСО 7010-W012 |
|
|
|
Общее предупреждение | Падение | Электричество |
ИСО 7010-W017 | ИСО 7010-W018 | ИСО 7010-W019 |
|
|
|
Горячая поверхность | Автоматический запуск | Предупреждение: раздавливание |
ИСО 7010-W022 | ИСО 7010-W024 | ИСО 7010-W025 |
|
|
|
Острый элемент | Раздавливание рук | Вращающиеся в противоположные стороны валы |
ИСО 7010-W026 | ИСО 7010-М012 | ИСО 7010-М021 |
|
|
|
Аккумулятор | Использовать поручни | Отключить прежде, чем осуществлять обслуживание или ремонт |
ИСО 7010-Р011 | ИСО 7010-Р012 | ИСО 7010-Р015 |
|
|
|
Не тушить водой | Недопустимы тяжелые нагрузки | Не засовывать |
ИСО 7010-Р017 | ИСО 7010-Р018 | ИСО 7010-Р019 |
|
|
|
Не толкать | Не сидеть | Не вставать на поверхность |
ИСО 7010-Р021 | ИСО 7010-Р022 | ИСО 7010-Р023 |
|
|
|
Не для собак | Не есть и не пить | Не загораживать |
ИСО 7010-Р024 | ИСО 7010-Р031 | |
|
| |
Не ходить и не вставать здесь | Не менять положение переключателя | |
МЭК 60417-1 | МЭК 60417-1 | МЭК 60417-1 |
|
|
|
Для обозначения возможности "говорить" | Для обозначения контроля проверки состояния аккумулятора | Для обозначения контроля, что функция в заблокированном состоянии |




















Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального, межгосударственного стандарта | |
ISO 2631 (all parts) | - | * | |
ISO 3746 | IDT | ГОСТ Р ИСО 3746-2013 "Акустика. Определение уровней звуковой мощности и звуковой энергии источников шума по звуковому давлению. Ориентировочный метод с использованием измерительной поверхности над звукоотражающей плоскостью" | |
ISO 3864-1 | IDT | ГОСТ ISO 3864-1-2013 "Графические символы. Сигнальные цвета и знаки безопасности. Часть 1. Принципы проектирования знаков и сигнальной разметки" | |
ISO 4413 | - | * | |
ISO 4414 | - | * | |
ISO 4871 | MOD | ГОСТ 30691-2001 (ИСО 4871-96) "Шум машин. Заявление и контроль значений шумовых характеристик" | |
ISO 7000 | - | * | |
ISO 7010 | - | * | |
ISO 8373:2012 | IDT | ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 "Роботы и робототехнические устройства. Термины и определения" | |
ISO 11202 | MOD | ГОСТ 31169-2003 (ИСО 11202:1995) "Шум машин. Измерение уровней звукового давления излучения на рабочем месте и в других контрольных точках. Ориентировочный метод измерений на месте установки" | |
_______________
| |||
ISO 12100:2010 | MOD | ГОСТ Р 54125-2010 (ИСО 12100:2010) "Безопасность машин и оборудования. Принципы обеспечения безопасности при проектировании" | |
_______________
| |||
ISO 13849-1 | IDT | ГОСТ Р ИСО 13849-1-2003 "Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования" | |
ISO 13850 | - | * | |
ISO 13854 | - | * | |
ISO 13855 | IDT | ГОСТ ИСО 13855-2006 "Безопасность оборудования. Расположение защитных устройств с учетом скоростей приближения частей тела человека" | |
ISO 13856 (all parts) | - | * | |
ISO 13857 | IDT | ГОСТ ISO 13857-2012 "Безопасность машин. Безопасные расстояния для предохранения верхних и нижних конечностей от попадания в опасную зону" | |
ISO 14118 | - | * | |
ISO 14119 | - | * | |
ISO 14120 | - | * | |
ISO 15534 (all parts) | IDT | ГОСТ Р ИСО 15534 "Эргономическое проектирование машин для обеспечения безопасности" | |
IEC 60204-1:2009 | - | *, | |
_______________
| |||
IEC 60335-1 | IDT | ГОСТ МЭК 60335-1-2008 | |
_______________ | |||
IEC 60335-2-29 | IDT | ГОСТ IEC 60335-2-29-2012 "Безопасность бытовых и аналогичных электрических приборов. Часть 2-29. Частные требования к зарядным устройствам батарей" | |
IEC 60417-1 | - | * | |
IEC 60529 | - | * | |
IEC 60825-1 | IDT | ГОСТ IEC 60825-1-2013 "Безопасность лазерой аппаратуры. Часть 1. Классификация оборудования, требования и руководство для пользователей" | |
IEC 61140 | MOD | ГОСТ Р 58698-2019 (МЭК 61140:2016) "Защита от поражения электрическим током. Общие положения для электроустановок и электрооборудования" | |
IEC 61496 (all parts) | - | * | |
IEC 62061:2012 | - | *, | |
_______________ | |||
IEC 62471 | IDT | ГОСТ Р МЭК 62471-2013 "Лампы и ламповые системы. Светобиологическая безопасность" | |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | |||
Библиография
[1] | ISO 1996 (all parts), Acoustics - Description, measurement and assessment of environmental noise |
[2] | ISO 2919, Radiological protection - Sealed radioactive sources - General requirements and classification |
[3] | ISO 3740, Acoustics - Determination of sound power levels of noise sources - Guidelines for the use of basic standards |
[4] | ISO 3925, Unsealed radioactive substances - Identification and documentation |
[5] | ISO 4126 (all parts), Safety devices for protection against excessive pressure |
[6] | ISO 6385, Ergonomic principles in the design of work systems |
[7] | ISO 7176 (all parts), Wheelchairs |
[8] | ISO 7212, Enclosures for protection against ionizing radiation - Lead shielding units for 50 mm and 100 mm thick walls |
[9] | ISO 7243, Hot environments - Estimation of the heat stress on working man, based on the WBGT-index (wet bulb globe temperature) |
[10] | ISO 7250 (all parts), Basic human body measurements for technological design |
[11] | ISO 9000:2005, Quality management systems - Fundamentals and vocabulary |
[12] | ISO/TR 9241-100, Ergonomics of human-system interaction - Part 100: Introduction to standards related to software ergonomics |
[13] | ISO 9241-210, Ergonomics of human-system interaction - Part 210: Human-centred design for interactive systems |
[14] | ISO 9241-400, Ergonomics of human-system interaction - Part 400: Principles and requirements for physical input devices |
[15] | ISO 9241-920, Ergonomics of human-system interaction - Part 920: Guidance on tactile and haptic interactions |
[16] | ISO 10218-1:2011, Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots |
[17] | ISO 10218-2:2011, Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration |
[18] | ISO 11200, Acoustics - Noise emitted by machinery and equipment - Guidelines for the use of basic standards for the determination of emission sound pressure levels at a work station and at other specified positions |
[19] | ISO 11228-1, Ergonomics - Manual handling - Part 1: Lifting and carrying |
[20] | ISO/TR 11688 (all parts), Acoustics - Recommended practice for the design of low-noise machinery and equipment |
[21] | ISO 13732 (all parts), Ergonomics of the thermal environment - Methods for the assessment of human responses to contact with surfaces |
[22] | ISO 13823, General principles on the design of structures for durability |
[23] | ISO 13849-2, Safety of machinery - Safety-related parts of control systems - Part 2: Validation |
[24] | ISO 14123 (all parts), Safety of machinery - Reduction of risks to health from hazardous substances emitted by machinery |
[25] | ISO 14152, Neutron radiation protection shielding - Design principles and considerations for the choice of appropriate materials |
[26] | ISO 14738, Safety of machinery - Anthropometric requirements for the design of workstations at machinery |
[27] | ISO/TS 15066, Robots and robotic devices - Safety requirements for industrial robots - Collaborative operation |
[28] | ISO/TS 15666, Acoustics - Assessment of noise annoyance by means of social and socio-acoustic surveys |
[29] | ISO 15667, Acoustics - Guidelines for noise control by enclosures and cabins |
[30] | ISO 15686-1, Buildings and constructed assets - Service life planning - Part 1: General principles and framework |
[31] | ISO 15686-2, Buildings and constructed assets - Service life planning - Part 2: Service life prediction procedures |
[32] | IEC/TS 61000-1-2, Electromagnetic compatibility (EMC) - Part 1-2: General - Methodology for the achievement of functional safety of electrical and electronic systems including equipment with regard to electromagnetic phenomena |
[33] | IEC 61000-4-2, Electromagnetic compatibility (EMC) - Part 4-2: Testing and measurement techniques - Electrostatic discharge immunity tests |
[34] | IEC 61000-6-1, Electromagnetic compatibility (EMC) - Part 6-1: Generic standards - Immunity for residential, commercial and light-industrial environments |
[35] | IEC 61000-6-2, Electromagnetic compatibility (EMC) - Part 6-2: Generic standards - Immunity for industrial environments |
[36] | IEC 61000-6-3, Electromagnetic compatibility (EMC) - Part 6-3: Generic standards - Emission standard for residential, commercial and light-industrial environments |
[37] | IEC 61000-6-4, Electromagnetic compatibility (EMC) - Part 6-4: Generic standards - Emission standard for industrial environments |
[38] | IEC 61160, Design review |
[39] | IEC 61508-7, Functional safety of electrical/electronic/programmable electronic safety-related systems - Part 7: Overview of techniques and measures |
[40] | IEC 61800-5-2, Adjustable speed electrical power drive systems - Part 5-2: Safety requirements - Functional |
[41] | IEC 61851 (all parts), Electric vehicle conductive charging system |
[42] | IEC/TS 62046, Safety of machinery - Application of protective equipment to detect the presence of persons |
[43] | IEC 62079, Preparation of instructions - Structuring, content and presentation |
[44] | EN 50272 (all parts), Safety requirements for secondary batteries and battery installations |
[45] | ANSI/RIA R15.06-1999, Industrial robots and robot systems - Safety requirements |
[46] | Fujikawa Т., Kubota M., Yamada Y., Ikeda H. Evaluation of Injury Level and Probability for Risk Assessment of Mobile Robots, Proceedings of SIAS2012, 2012 |
[47] | Haddadin S., |
[48] | Haddadin S., |
[49] | Haddadin S., |
[50] | Haddadin S., |
[51] | Haddadin S., & |
[52] | Haddadin S., Haddadin A., Khoury S., Rokahr T., Parusel S., Burgkart R. et al. On making robots understand safety: Embedding injury knowledge into control. Int. J. Robot. Res. 2012 |
[53] | Haddadin S. Human Injury in Robotics: Technical Report. DLR, Germany, 2012 |
[54] | Khatib O. Inertial properties in robotic manipulation: an object-level framework. Int. J. Robot. Res. 1995, 14 (1) pp.19-36 |
[55] | National Highway Traffic Safety Administration. FMVSS 208 Occupant crash protection and National Highway Traffic Safety Administration, Proposed Amendment to FMVSS No 213 Frontal Test Procedure. U.S. Department of Transportation, 2002 |
[56] | Ono K., Kikuchi A., Nakamura M., Kobayashi H., Nakamura N. Human head tolerance to sagittal impact - Reliable estimation deduced from experimental head injury using subhuman primates and human cadaver skulls, Proceedings SAE Technical Paper 801303, doi:, 1980 doi:10.4271/801303 |
[57] | Yamada Y., Suita K., Imai K., Ikeda H., Sugimoto N. A failure-to-safety robot system for human-robot coexistence. Robot. Auton. Syst. 1996, 18 (1-2) pp.283-291 |
[58] | Yamada Y., Hirasawa Y., Huang S.Y., Umetani Y., Suita K. Human-Robot Contact in the Safeguarding Space, IEEE/ ASME Trans, on Mechatronics, Vol. 2, No. 4, pp.230-236, 1997 |
[59] | Ruedi T.P., Buckley R.E., Morgan C.G. АО Principles of Fracture Management, Thieme, Ed., 2007. Information on the design of workplaces with collaborative robots, U 001/2009e (October 2009 edition, revised February 2011), Available from <http://www.dguv.de/ifa/en/pra/kollaborierende_roboter> |
УДК 656.072:681.3:006.354 |
|
| ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, требования, безопасность роботов, персональный уход | |||
Электронный текст документа
и сверен по:
, 2020
{kind=link}