ГОСТ Р 60.0.0.3-2016/ИСО 9787:2013
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
СИСТЕМЫ КООРДИНАТ И ОБОЗНАЧЕНИЕ ПЕРЕМЕЩЕНИЙ
Robots and robotic devices. Coordinate systems and motion nomenclatures
ОКС 25.040.30
Дата введения 2018-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным бюджетным учреждением "Консультационно-внедренческая фирма в области международной стандартизации и сертификации "Фирма "ИНТЕРСТАНДАРТ" совместно с Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) и ООО "Корпоративные электронные системы" (ООО "КЭЛС-центр") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 ноября 2016 г. N 1623-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 9787:2013* "Роботы и робототехнические устройства. Системы координат и обозначение перемещений" (ISO 9787:2013 "Robots and robotic devices - Coordinate systems and motion nomenclatures", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Сентябрь 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на все роботы и робототехнические устройства наземного применения. Он идентичен международному стандарту ИСО 9787:2013, разработанному подкомитетом SC 2 "Роботы и робототехнические устройства" Технического комитета ISO/TC 184 "Системы автоматизации и их интеграция".
Примечание - С 1 января 2016 года ISO/TC 184/SC 2 "Роботы и робототехнические устройства" преобразован в ISO/TC 299 "Робототехника".
1 Область применения
Настоящий стандарт определяет и устанавливает системы координат роботов. Он также определяет типы основных перемещений роботов, включая их обозначения. Он предназначен для настройки, тестирования и программирования роботов.
Настоящий стандарт применим ко всем роботам и робототехническим устройствам, определенным в ИСО 8373.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 8373:2012, Robots and robotic devices - Vocabulary (Роботы и робототехнические устройства. Термины и определения)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 12100, а также следующие термины с соответствующими определениями:
3.1
конфигурация (configuration): Совокупность значений положения всех шарниров, которая полностью определяет форму робота в любой момент времени. [ИСО 8373:2012, 3.5] |
3.2
установочная поверхность основания (base mounting surface): Поверхность сопряжения руки робота с основанием. [ИСО 8373:2012, 3.9] |
3.3
мобильная платформа (mobile platform): Совокупность всех узлов мобильного робота, обеспечивающих его передвижение. [ИСО 8373:2012, 3.18, модифицировано: удалены примечания 1 и 2] |
3.4
глобальная система координат (world coordinate system): Неподвижная система координат, привязанная к месту нахождения робота, которая не зависит от перемещений робота. [ИСО 8373:2012, 4.7.1] |
3.5
система координат основания (base coordinate system): Система координат, связанная с установочной поверхностью основания. [ИСО 8373:2012, 4.7.2] |
3.6
система координат механического интерфейса (mechanical interface coordinate system): Система координат, связанная с механическим интерфейсом руки робота. [ИСО 8373:2012, 4.7.3] |
3.7
система координат инструмента, СКИ (tool coordinate system, TCS): Система координат, связанная с инструментом или рабочим органом робота, прикрепленным к механическому интерфейсу. [ИСО 8373:2012, 4.7.5] |
3.8
рабочее пространство (working space): Пространство, в котором может перемещаться базисная точка запястья с учетом диапазонов вращательных и поступательных движений степеней подвижности запястья. [ИСО 8373:2012, 4.8.4] |
3.9
центральная точка инструмента, ЦТИ (tool centre point, TCP): Точка, определенная в системе координат механического интерфейса для конкретного применения робота. [ИСО 8373:2012, 4.9] |
3.10
начало координат мобильной платформы, точка отсчета мобильной платформы (mobile platform origin, mobile platform reference point): Базисная точка системы координат мобильной платформы. [ИСО 8373:2012, 4.11] |
3.11
система координат задания (task coordinate system): Система координат, связанная с местом выполнения задания, обозначаемая как [ИСО 14539:2000, 3.3.5] |
3.12
система координат объекта (object coordinate system): Система координат, связанная с объектом, обозначаемая как [ИСО 14539:2000, 3.3.5] |
3.13
система координат камеры (camera coordinate system): Система координат, связанная с сенсором, который контролирует место выполнения задания, обозначаемая как Примечание - Система технического зрения может быть установлена для определения положения и ориентации произвольно расположенных объектов. [ИСО 14539:2000, 3.3.7] |
3.14
захватное устройство зажимного типа (grasp-type gripper): Захватное устройство, которое удерживает объект с помощью пальцеобразных механизмов. [ИСО 14539:2000, 4.1.2.1] |
4 Общие правила для систем координат и типов перемещений
4.1 Правые системы координат
Все системы координат, использованные в настоящем стандарте, определены как ортогональные правые системы координат, как показано на рисунке 1.
|
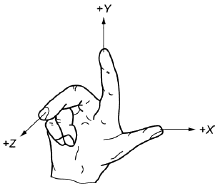
Рисунок 1 - Правая система координат
4.2 Поступательные перемещения
Поступательные перемещения вдоль осей X, Y и Z обозначаются следующим образом:
+ или - x вдоль оси X;
+ или - y вдоль оси Y;
+ или - z вдоль оси Z.
4.3 Вращения
Вращения вокруг осей X, Y и Z обозначаются следующим образом:
+ или - A вокруг оси X;
+ или - B вокруг оси Y;
+ или - C вокруг оси Z.
A, B и C называются также углами крена, тангажа и рыскания, соответственно.
Положительные значения A, B и C отсчитываются в направлении завинчивания винта с правой резьбой в положительном направлении осей X, Y и Z, соответственно (см. рисунок 2).
Общие вращения формируются за счет комбинации индивидуальных вращений.
|
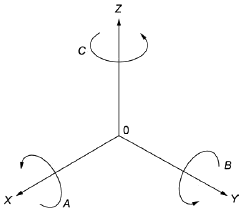
A - угол крена; B - угол тангажа; C - угол рыскания
Рисунок 2 - Вращения
4.4 Обозначение степеней подвижности манипуляторов
Если степени подвижности обозначить числами, то степень подвижности 1 должна соответствовать первому подвижному соединению, ближайшему к установочной поверхности основания, степень подвижности 2 - второму подвижному соединению и так далее, а степень подвижности m - подвижному соединению, на котором установлен механический интерфейс.
Примечание - Примеры приведены в приложении А.
5 Системы координат
5.1 Глобальная система координат  -
- -
- -
-
Начало глобальной системы координат должно быть определено пользователями в соответствии с их требованиями. Ось +
коллинеарна направлению ускорения вектора силы тяжести, но направлена в противоположную сторону. Ось +
должна быть определена пользователями в соответствии с их требованиями (см. рисунок 3).
5.2 Система координат основания  -
- -
- -
-
Начало системы координат основания должно быть определено изготовителем робота. Ось +
направлена в сторону механической конструкции робота перпендикулярно к установочной поверхности основания. Ось +
направлена из начала координат и проходит через проекцию центра рабочего пространства
на плоскость установочной поверхности основания (см. рисунки 3 и 4). Если конфигурация робота препятствует выполнению данного соглашения, то направление оси +
должно быть определено изготовителем.
Примечание - Примеры систем координат основания и механического интерфейса приведены в приложении А.
|
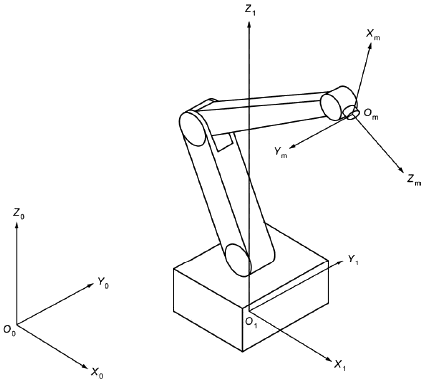
Рисунок 3 - Примеры систем координат
|
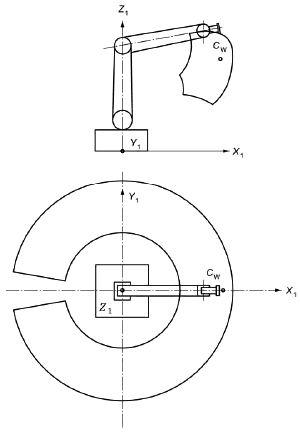
Рисунок 4 - Примеры рабочего пространства робота
5.3 Система координат механического интерфейса  -
- -
- -
-
Началом системы координат механического интерфейса является центр механического интерфейса
. Ось +
направлена перпендикулярно в сторону от механического интерфейса. Ось +
определена как линия, параллельная оси +
(+
), когда механический интерфейс расположен параллельно плоскости
(
), а основные и дополнительные степени подвижности робота находятся вблизи своих средних положений. Если конфигурация робота препятствует выполнению данного соглашения, то положение основных степеней подвижности должно быть определено изготовителем (см. рисунок 3).
Примечание - Примеры систем координат основания и механического интерфейса приведены в приложении А.
5.4 Система координат инструмента (СКИ)  -
- -
- -
-
Началом системы координат инструмента является центральная точка инструмента (ЦТИ)
(см. рисунок 5). Направление оси +
зависит от инструмента, обычно она направлена в сторону от инструмента. В случае плоского захватного устройства зажимного типа ось +
расположена в плоскости перемещения пальцев.
|
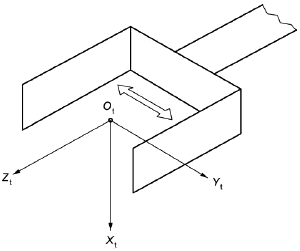
Рисунок 5 - Пример системы координат инструмента
5.5 Система координат мобильной платформы  -
- -
- -
-
Началом системы координат мобильной платформы является исходная точка мобильной платформы . Направление оси +
обычно соответствует направлению движения вперед мобильной платформы. Ось +
обычно направлена вверх от мобильной платформы (см. рисунок 6).
|
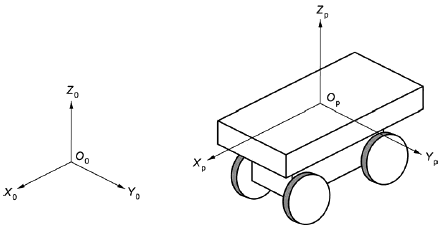
Рисунок 6 - Пример системы координат мобильной платформы
5.6 Система координат задания  -
- -
- -
-
Система координат задания показана на рисунке 7.
|

1 - глобальная система координат; 2 - система координат основания; 3 - система координат механического интерфейса; 4 - система координат инструмента; 5 - система координат задания; 6 - система координат объекта; 7 - система координат камеры; 8 - ЦТИ; 9 - захватное устройство
Рисунок 7 - Системы координат при взятии объекта
5.7 Система координат объекта  -
- -
- -
-
Система координат объекта показана на рисунке 7.
5.8 Система координат камеры  -
- -
- -
-
Система координат камеры показана на рисунке 7.
Приложение А
(справочное)
Примеры систем координат для разных механических конструкций
|
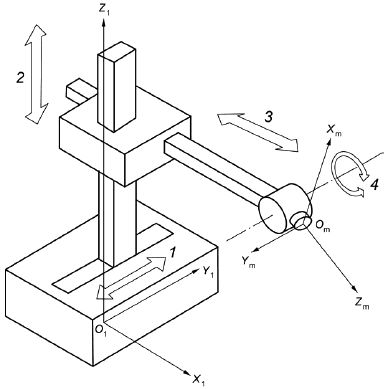
Рисунок А.1 - Робот с прямоугольной системой координат
|
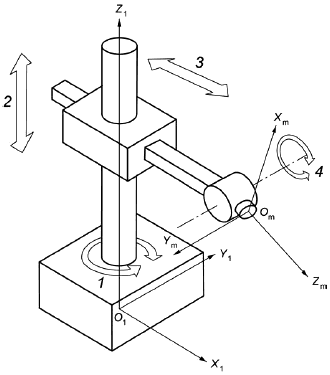
Рисунок А.2 - Робот с цилиндрической системой координат
|
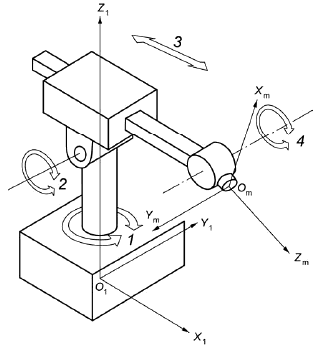
Рисунок А.3 - Робот с полярной системой координат
|
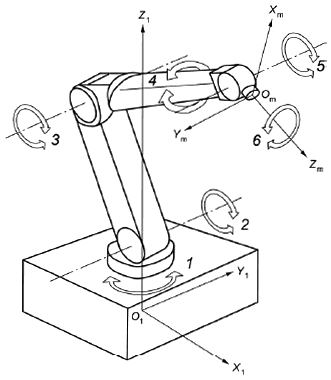
Рисунок А.4 - Шарнирный робот
|
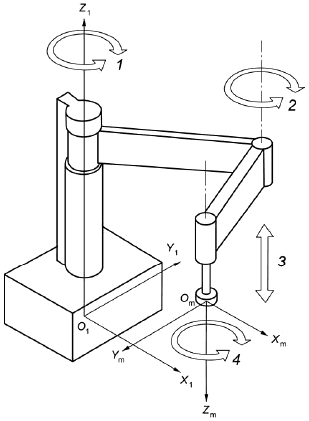
Рисунок А.5 - Робот типа SCARA
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 8373:2012 | IDT | ГОСТ Р ИСО 8373-2014 "Роботы и робототехнические устройства. Термины и определения" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. | ||
Библиография
[1] | ISO 14539:2000, | Manipulating industrial robots - Object handling with grasp-type grippers - Vocabulary and presentation of characteristics |
УДК 656.072:681.3:006.354 | ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, промышленные роботы, термины, определения, системы координат | |
Электронный текст документа
и сверен по:
, 2020
{kind=link}