ГОСТ Р 60.1.2.2-2016/ИСО 10218-2:2011
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ТРЕБОВАНИЯ ПО БЕЗОПАСНОСТИ ДЛЯ ПРОМЫШЛЕННЫХ РОБОТОВ
Часть 2
Робототехнические системы и их интеграция
Robots and robotic devices. Safety requirements for industrial robots. Part 2. Robot systems and integration
ОКС 25.040.30
Дата введения 2018-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным бюджетным учреждением "Консультационно-внедренческая фирма в области международной стандартизации и сертификации "Фирма "ИНТЕРСТАНДАРТ" совместно с Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) и ООО "Корпоративные электронные системы" (ООО "КЭЛС-центр") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2016 г. N 1657-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 10218-2:2011* "Роботы и робототехнические устройства. Требования безопасности для промышленных роботов. Часть 2. Робототехнические системы и их интеграция" (ISO 10218-2:2011 "Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Сентябрь 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Безопасность" и распространяется на все промышленные роботы и робототехнические устройства. Он идентичен международному стандарту ИСО 10218-1:2011, разработанному подкомитетом (ПК) 2 "Роботы и робототехнические устройства" Технического комитета (ТК) 184 ИСО "Системы автоматизации и их интеграция".
Примечание - С 1 января 2016 года ИСО/ТК 184/ПК 2 "Роботы и робототехнические устройства" преобразован в ИСО/ТК 299 "Робототехника".
Настоящий стандарт был создан на основании понимания конкретных угроз, которые представляют промышленные робототехнические системы при их интеграции и установке в промышленные роботизированные модули и линии.
Опасности часто являются уникальными для конкретных робототехнических систем. Число и типы опасностей непосредственно связаны с природой процесса автоматизации и сложностью установки.
Риски, связанные с этими опасностями, изменяются в зависимости от типа используемого робота и его назначения, а также от методов, используемых при его установке, программировании, функционировании и обслуживании.
Учитывая разнообразную природу опасностей, связанных с применением промышленных роботов, настоящий стандарт содержит руководство по обеспечению безопасности при интеграции и установке роботов. Поскольку на безопасность при использовании промышленных роботов влияет конструкция конкретной робототехнической системы, то дополнительной, хотя и не менее важной, целью является создание руководств по проектированию, построению и информации по использованию робототехнических систем и роботизированных модулей. Требования к той части системы, которой является сам робот, определены в ИСО 10218-1.
Обеспечение безопасности робототехнических систем и роботизированных модулей зависит от взаимодействия разнообразных "заинтересованных сторон" - тех сторон, которые разделяют ответственность за конечную цель - создание безопасной производственной среды. Заинтересованными сторонами могут быть изготовители, поставщики, интеграторы и пользователи (сторона, ответственная за использование роботов), но все они преследуют достижение общей цели - создание безопасной машины (робота). Требования настоящего стандарта могут быть заданы для одной из заинтересованных сторон, но пересекающиеся области ответственности могут привлечь все заинтересованные стороны к выполнению одинаковых требований. При использовании настоящего стандарта заинтересованные стороны должны понимать, что все установленные требования могут относиться к ним, даже если эти требования непосредственно и не относятся к задачам конкретной заинтересованной стороны.
Настоящий стандарт дополняет ИСО 10218-1, который относится только к роботам. Настоящий стандарт содержит дополнительную информацию к ИСО 12100 и ИСО 11161, содержащую требования по идентификации и ответственности стандарта типа С относительно уникальных опасностей, возникающих при интеграции, установке и использовании промышленных роботов. Новые технические требования включают, но не ограничиваются, инструкции по применению новых требований из ИСО 10218-1 к характеристикам связанных с безопасностью систем управления, функциям остановки робота, деблокирующим устройствам, верификации программ, характеристикам беспроводного пульта управления, характеристикам взаимодействующего с человеком робота и изменениям конструкции в целях безопасности.
Настоящий стандарт наряду с ИСО 10218-1 является частью комплекса стандартов, относящихся к роботам и робототехническим устройствам. Другие стандарты охватывают такие вопросы, как интегрированные робототехнические системы, системы координат и движения со степенями свободы, общие характеристики, рабочие характеристики и соответствующие методы их тестирования, терминологию и механические интерфейсы. Необходимо отметить, что эти стандарты являются взаимосвязанными, а также связанными с другими международными стандартами.
Для облегчения восприятия настоящего стандарта используемые в нем термины "робот" и "робототехническая система" соответствуют терминам "промышленный робот" и "промышленная робототехническая система", определенным в ИСО 10218-1.
На рисунке 1 показана взаимосвязь областей применения машиностроительных стандартов, относящихся к робототехнической системе. Требования к одиночному роботу определены в ИСО 10218-1, а требования к робототехническим системам и роботизированным модулям определены в настоящем стандарте. В состав роботизированного модуля могут входить другие машины, подчиняющиеся своим стандартам уровня С, а робототехническая система может быть частью интегрированной производственной системы, определенной в ИСО 11161, которая, в свою очередь, может соответствовать требованиям других стандартов уровней В и С.
|
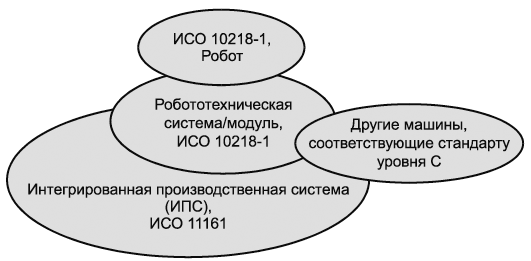
Рисунок 1 - Графическое представление взаимосвязей между стандартами, связанными с робототехнической системой/модулем
1 Область применения
Настоящий стандарт определяет требования безопасности при интеграции промышленных роботов и промышленных робототехнических систем, определенных в ИСО 10218-1, а также роботизированных модулей. Интеграция распространяется на:
a) проектирование, изготовление, установку, функционирование, техническое обслуживание и вывод из эксплуатации промышленной робототехнической системы или модуля;
b) информацию, необходимую для проектирования, изготовления, установки, функционирования, технического обслуживания и вывода из эксплуатации промышленной робототехнической системы или модуля;
c) устройства, входящие в состав промышленной робототехнической системы или модуля.
Настоящий стандарт определяет основные опасности и опасные ситуации, существующие для данных систем, и устанавливает требования для устранения или необходимого снижения рисков, связанных с данными опасностями. Хотя считается, что шум является существенной опасностью для промышленных робототехнических систем, он не рассматривается в настоящем стандарте. Кроме того, настоящий стандарт определяет требования к промышленной робототехнической системе как части интегрированной производственной системы. В настоящем стандарте не рассматриваются специально опасности, связанные с технологическими процессами (например, лазерное излучение, отбрасываемая стружка, испарения при сварке). К таким опасностям, связанным с технологическими процессами, могут быть применены другие стандарты.
Настоящий стандарт не применим к непромышленным роботам, хотя основные принципы безопасности, установленные в ИСО 10218, могут быть использованы для других типов роботов.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 4413, Hydraulic fluid power - General rules and safety requirements for systems and their components (Безопасность оборудования. Требования безопасности к гидравлическим и пневматическим системам и компонентам. Гидравлика)
ISO 4414, Pneumatic fluid power - General rules and safety requirements for systems and their components (Безопасность оборудования. Требования безопасности к гидравлическим и пневматическим системам и компонентам. Пневматика)
ISO 8995-1, Lighting of work places - Part 1: Indoor (Освещение рабочих мест.Часть 1. Внутреннее освещение)
ISO 9946, Manipulating industrial robots - Presentation of characteristics (Промышленные манипуляционные роботы. Представление характеристик)
ISO 10218-1, Robots and robotic devices - Safety requirements for industrial robots - Part 1: Industrial robots (Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы)
ISO 11161, Safety of machinery - Integrated manufacturing systems - Basic requirements (Безопасность машин и механизмов. Интегрированные производственные системы. Основные требования)
ISO 12100, Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин и механизмов. Общие принципы проектирования. Оценивание и снижение рисков)
ISO 13849-1:2006, Safety of machinery - Safety-related parts of control systems - Part 1: General principles for design (Безопасность машин и механизмов. Части систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования)
ISO 13850, Safety of machinery - Emergency stop - Principles for design (Безопасность машин и механизмов. Установки аварийного выключения. Функциональные аспекты. Принципы)
ISO 13854, Safety of machinery - Minimum gaps to avoid crushing of parts of the human body (Безопасность машин и механизмов. Минимальные расстояния для предотвращения защемления человеческого тела)
ISO 13855, Safety of machinery - Positioning of safeguards with respect to the approach speeds of parts of the human body (Безопасность машин и механизмов. Расположение защитных устройств с учетом скорости приближения частей тела человека)
ISO 13856 (all parts), Safety of machinery - Pressure-sensitive protective devices (Безопасность машин и механизмов. Защитные устройства, реагирующие на давление)
ISO 13857, Safety of machinery - Safety distances to prevent hazard zones being reached by upper and lower limbs (Безопасность машин и механизмов. Безопасные расстояния для предохранения верхних и нижних конечностей от попадания в опасную зону)
ISO 14118, Safety of machinery - Prevention of unexpected start-up (Безопасность машин и механизмов. Предотвращение неожиданного запуска)
ISO 14119, Safety of machinery - Interlocking devices associated with guards - Principles for design and Selection (Безопасность машин и механизмов. Блокировочные устройства, связанные с защитными устройствами. Принципы конструирования и выбора)
ISO 14120, Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards (Безопасность машин и механизмов. Ограждения. Общие требования к проектированию и строительству стационарных и передвижных ограждений)
ISO 14122 (all parts), Safety of machinery - Permanent means of access to machinery (Безопасность машин и механизмов. Средства доступа к машинам стационарные)
IEC 60204-1, Safety of machinery - Electrical equipment of machines - Part 1: General requirements (Безопасность машин и механизмов. Электрооборудование машин и механизмов. Часть 1. Общие требования)
IEC 61496-1, Safety of machinery - Electro-sensitive protective equipment - Part 1: General requirements and tests (Безопасность машин и механизмов. Электрочувствительное защитное оборудование. Часть 1. Общие требования и испытания)
IEC 61800-5-2, Adjustable speed electrical power drive systems - Part 5-2: Safety requirements - Functional (Системы силовых электроприводов с регулируемой скоростью. Часть 5-2. Требования функциональной безопасности)
IEC/TS 62046, Safety of machinery - Application of protective equipment to detect the presence of persons (Безопасность машин и механизмов. Применение сенсорного оборудования для защиты персонала)
________________
Заменен на IEC 62046:2018.
IEC 62061:2005, Safety of machinery - Functional safety of safety-related electrical, electronic and programmable electronic control systems (Безопасность машин и механизмов. Функциональная безопасность систем управления электрических, электронных и программируемых электронных, связанных с безопасностью)
3 Термины и определения
В настоящем документе применены термины по ИСО 10218-1 и ИСО 12100, а также следующие термины с соответствующими определениями:
3.1 применение (application): Использование по назначению робототехнической системы, т.е. совокупность технологического процесса, задания и предназначения робототехнической системы.
Пример - Точечная сварка, окраска, сборка, укладка на поддоны.
3.2 взаимодействующий с человеком робот (collaborative robot): Робот, сконструированный для непосредственного взаимодействия с человеком в рамках определенного совместного рабочего пространства (3.3).
3.3 совместное рабочее пространство (collaborative workspace): Рабочее пространство, находящееся внутри защищенного пространства, где робот и человек могут выполнять работы одновременно в процессе производства.
3.4 пульт управления (control station): Часть робототехнической системы, содержащая одно или несколько управляющих устройств, предназначенных для включения и выключения функций данной системы или ее частей.
Примечание - Пульт управления может быть стационарным (например, панель управления) или переносным (например, подвесной пульт управления).
3.5 защитное ограждение (distance guard): Ограждение, которое не полностью охватывает опасную зону, но препятствует или снижает возможность доступа благодаря эффективности своих размеров и расстоянию от опасного пространства.
Пример - Периметровое ограждение или тоннельное ограждение.
3.6 интеграция (integration): Действие по объединению робота с другим оборудованием или другой машиной (включая другие роботы) для образования системы машин, способной выполнять полезную работу, например, изготавливать детали.
Примечание - Данное действие по построению системы машин может учитывать требования по установке данной системы.
3.7 интегратор (integrator): Субъект, который проектирует, поставляет, изготавливает или собирает робототехнические системы или интегрированные производственные системы и отвечает за стратегию обеспечения безопасности, включая меры защиты, интерфейсы управления и взаимосвязи системы управления.
Примечание - Интегратором может быть изготовитель, сборщик, инженерная компания или пользователь.
3.8
интегрированная производственная система; ИПС (integrated manufacturing system, IMS): Группа машин, работающих вместе скоординированным образом, связанных между собой транспортно-загрузочной системой, взаимосвязанных по управлению (т.е. системой управления ИПС), с целью изготовления, обработки, перемещения или упаковки дискретных деталей или сборочных единиц. |
[ИСО 11161:2007, определение 3.1] |
3.9 производственный роботизированный модуль (industrial robot cell): Одна или несколько робототехнических систем, включая связанные с ними машины, механизмы и оборудование, расположенные в защищенном пространстве с использованием мер защиты.
3.10 производственная роботизированная линия (industrial robot line): Несколько роботизированных модулей, выполняющих одинаковые или разные функции, и связанное с ними оборудование, расположенные в едином или сопряженных защищенных пространствах.
3.11 безопасное состояние (safe state): Состояние машины или элемента оборудования, при котором она не представляет неминуемой опасности.
3.12 одновременное движение (simultaneous motion): Движение двух и более роботов, находящихся в одно время под управлением одного пульта, которое координируется или синхронизируется путем общей математической корреляции.
3.13 пространство (space): Трехмерный объем.
3.13.1 рабочее пространство, операционное пространство (operating space, operational space): Часть ограниченного пространства (3.13.2), фактически используемая при движении робота по командам функциональной программы.
Примечание - Адаптировано из ИСО 8373:1994, определение 4.8.3.
3.13.2 ограниченное пространство (restricted space): Часть максимального пространства в пределах ограничивающих устройств, устанавливающих границы, которые не могут быть нарушены роботом.
Примечание - Адаптировано из ИСО 8373:1994, определение 4.8.2.
3.13.3 защищенное пространство (safeguarded space): Пространство, определенное периметром защитных средств.
3.14 валидация (validation): Подтверждение посредством предоставления объективных свидетельств того, что требования, предназначенные для конкретного применения, выполнены.
3.15 верификация (verification): Подтверждение посредством предоставления объективных свидетельств того, что установленные требования выполнены.
4 Идентификация опасностей и общая оценка рисков
4.1 Общие положения
4.1.1 Эксплуатационные характеристики роботов могут существенно отличаться от эксплуатационных характеристик других машин и оборудования вследствие следующих факторов:
a) роботы способны осуществлять высокоэнергетические движения в большом операционном пространстве;
b) начало движения и траектория перемещения руки робота трудно предсказуемы и могут изменяться, например, вследствие изменения требований к функционированию;
c) рабочее пространство робота может перекрывать часть рабочего пространства других роботов или рабочие пространства других машин и связанного с ними оборудования;
d) от операторов может потребоваться работа в непосредственной близости от робототехнической системы при поданном питании на приводы.
4.1.2 Необходимо идентифицировать опасности и оценить риски, связанные с роботом и его применением, перед тем как выбирать и проектировать необходимые меры защиты для адекватного снижения рисков. Технические меры для снижения риска основываются на следующих фундаментальных принципах:
a) устранение опасностей с помощью надлежащей конструкции или их снижение с помощью замены;
b) предотвращение попадания оператора в опасные ситуации или управление опасными ситуациями так, чтобы достичь безопасного состояния прежде, чем оператор столкнется с данной опасностью;
c) снижение риска при вмешательстве в работу робота (например, обучением).
4.1.3 Реализация вышеизложенных принципов может включать:
a) конструирование робототехнической системы так, чтобы задания выполнялись при нахождении оператора вне защищенного пространства;
b) создание защищенного пространства и ограниченного пространства;
c) обеспечение соответствия требованиям других стандартов, когда вмешательство в работу робота происходит внутри защищенного пространства.
4.1.4 Тип робота, его применение и его взаимосвязь с другими машинами и относящимся к ним оборудованием влияют на конструкцию и выбор мер защиты, которые должны соответствовать выполняемой работе и обеспечивать, если необходимо, безопасное выполнение обучения, задания уставок, технического обслуживания, верификации программ и операций по поиску и устранению неисправностей.
4.2 Проектирование размещения
Проектирование размещения робототехнической системы и роботизированного модуля является важным процессом для устранения опасностей и снижения рисков. В процессе проектирования размещения необходимо учитывать следующие факторы.
a) Установка физических ограничений (в трех измерениях) роботизированного модуля или линии, включая другие элементы большего модуля или системы (интегрированной производственной системы):
1) масштаб и начало координат для моделирования размещения на эскизных чертежах;
2) расположение и размеры компонентов в рамках доступных возможностей (масштабирование).
b) Рабочие пространства, доступ и уборка:
1) определение максимального пространства робототехнической системы, установка ограниченного и рабочего пространств и определение необходимости уборки вокруг препятствий, таких как строительные конструкции;
2) направления движения (пешеходные проходы, маршруты для посетителей, перемещение материальных объектов за пределы защищенного периметра модуля или линии);
3) доступ и безопасные проходы к службам поддержки (электричество, газ, вода, вакуум, гидравлика, вентиляция) и системам управления;
4) доступ и безопасные проходы с целью эксплуатационного обслуживания, уборки, поиска и устранения неисправностей, технического обслуживания;
5) кабели или другие опасности от скольжений, спотыканий и падений;
6) кабельные лотки.
c) Вмешательство оператора - размещение должно быть спроектировано так, чтобы задания, требующие вмешательства оператора, выполнялись извне защищенного пространства. Если это нереализуемо или при вмешательстве оператора требуются силовые перемещения машин, то должны быть обеспечены соответствующие деблокирующие устройства. Деблокирующие устройства могут быть сконструированы для управления:
1) всем роботизированным модулем;
2) пространством роботизированного модуля;
3) отдельной машиной или оборудованием роботизированного модуля.
Примечание - Более подробная информация приведена в ИСО 12100.
d) Эргономика и человеко-машинный интерфейс:
1) видимость выполняемых операций;
2) понятность органов управления;
3) четкая ассоциация органов управления с роботом;
4) региональные традиции конструкции органов управления;
5) расположение изделия относительно оператора;
6) предсказуемое неправильное использование;
7) совместная работа.
e) Условия окружающей среды:
1) вентиляция;
2) искрение при сварке.
f) Загрузка и разгрузка при смене обрабатываемых деталей или инструмента.
g) Учесть наличие защищенного периметра.
h) Требования к устройствам аварийной остановки и их размещение, а также возможное разделение роботизированного модуля на пространства (например, локальной аварийной остановки или остановки всего модуля).
i) Требования к деблокирующим устройствам и их размещение.
j) Внимание к использованию по назначению всех компонентов.
При рисках необходимо определить дополнительное пространство за пределами ограниченного пространства, требуемое для создания защищенного пространства.
4.3 Общая оценка рисков
4.3.1 Общие положения
Поскольку робототехническая система всегда интегрируется в конкретную среду, то интегратор должен выполнить общую оценку рисков для определения мер, необходимых для адекватного снижения рисков, представленных данным интегрированным применением робототехнической системы. Особое внимание следует уделить случаям, когда ограждения удаляются с отдельных машин для того, чтобы добиться интегрированного применения системы.
Общая оценка рисков делает возможными систематический анализ и оценку рисков, связанных с робототехнической системой, на протяжении всего ее жизненного цикла (т.е. ввод в эксплуатацию, наладка, работа, техническое обслуживание, ремонт, вывод из эксплуатации).
За общей оценкой рисков следует, если необходимо, снижение рисков. Если данный процесс повторяется, то образуется итерационный процесс по устранению опасностей, насколько это будет практически оправданно, и снижению рисков с помощью применения мер защиты.
Общая оценка рисков включает:
- определение границ робототехнической системы (см. 4.3.2);
- идентификацию опасностей (см. 4.4);
- расчет рисков;
- оценку рисков.
4.3.2 Границы робототехнической системы
Интеграция робототехнической системы начинается с формирования спецификации ее использования по назначению и границ, описанных в ИСО 12100, ИСО 11161 и других применимых стандартах уровня С. Данная спецификация должна содержать, например, следующее:
a) границы использования:
1) описание функций использования по назначению и при реально предсказуемом неправильном использовании;
2) описание разных режимов работы пользователя;
3) анализ последовательности операций технологического процесса, включая вмешательства оператора;
4) описание интерфейсов, инструмента и оборудования.
Примечание - Желательно, чтобы принимались во внимание стандарты уровня С, относящиеся к данным устройствам;
5) подключения инженерных сетей;
6) информацию, поставляемую изготовителем на основании ИСО 10218-1, включая принятые меры по снижению рисков;
7) необходимые источники питания и их принадлежности;
8) необходимые или ожидаемые навыки (компетенции) пользователей;
b) границы пространств (описание размещения см. в 5.5):
1) необходимый диапазон движений машины;
2) необходимое пространство для установки и технического обслуживания;
3) необходимое пространство для выполнения заданий оператора и других вмешательств человека;
4) возможности по реконфигурированию (ИСО 11161);
5) необходимый доступ (см. 5.5.2);
6) фундамент;
7) необходимое пространство для доставки и удаления устройств или оборудования;
c) временные ограничения:
1) установленный срок службы машин и их компонентов (сменных деталей, инструмента и т.д.);
2) маршрутные карты технологических процессов и согласования по времени;
3) рекомендуемые интервалы между техническими обслуживаниями;
d) другие ограничения:
1) связанные с окружающей средой (температура, использование внутри или вне помещений, стойкость по отношению к пыли и влаге и т.д.);
2) необходимый уровень чистоты для использования по назначению и внешней среды;
3) свойства обрабатываемых материалов;
4) вредные окружающие среды;
5) усвоенные уроки, т.е. изучение и сравнение, включая имеющиеся отчеты о несчастных случаях и происшествиях, подобных действий и систем.
Примечание - Другие национальные стандарты и местные законы также могут предоставить важную информацию об источниках энергии и требованиях по безопасной эксплуатации и установке.
4.4 Идентификация опасностей
4.4.1 Общие положения
Перечень существенных опасностей для роботов и робототехнических систем, приведенный в приложении А, является результатом идентификации опасностей и общей оценки рисков, выполненных в соответствии с ИСО 12100.
Другие опасности (например, пары, газы, химикаты и горячие объекты) могут возникать при конкретных применениях (например, сварка, лазерная резка, механообработка) и при взаимодействии робототехнической системы с другими машинами (например, раздавливание, скалывание, удар). Данные виды опасностей должны рассматриваться индивидуально при общей оценке рисков для конкретного применения.
4.4.2 Идентификация задания
Для того чтобы определить возможное возникновение опасных ситуаций, необходимо идентифицировать задания, которые должны быть выполнены операторами робототехнической системы и связанного с ней оборудования. Интегратор должен идентифицировать и документировать данные задания. Должны быть проведены обсуждения с пользователем для того, чтобы быть уверенным в том, что все реально предсказуемые опасные ситуации (комбинации заданий и опасностей), связанные с роботизированным модулем, идентифицированы, включая косвенные взаимодействия (например, люди, у которых нет заданий, связанных с данной системой, но подвергающиеся опасностям, связанным с данной системой). К таким заданиям относятся, но не ограничиваются ими, следующие:
a) управление и мониторинг технологического процесса;
b) загрузка обрабатываемых деталей;
c) программирование и верификация программ;
d) короткое вмешательство оператора, не требующее разборки;
e) наладка (например, изменение положения фиксаторов, замена инструмента);
f) поиск и устранение неисправностей;
g) устранение нарушений работоспособности (например, заедание оборудования, падение деталей, восстановление после происшествий и ненормальные условия);
h) контроль за накопленной опасной энергией (включая фиксаторы, зажимы, поворотные столы и другое оборудование);
i) техническое обслуживание и ремонт;
j) очистка оборудования.
4.5 Устранение опасностей и снижение рисков
После идентификации опасностей необходимо оценить риски, связанные с робототехнической системой, перед тем как применять подходящие меры для адекватного снижения рисков. Меры по снижению риска основываются на следующих фундаментальных принципах:
a) устранение опасностей с помощью надлежащей конструкции или снижение связанного с ними риска с помощью замены;
b) применение ограждений с целью предотвращения попадания оператора в опасные ситуации или обеспечения того, чтобы опасные ситуации переходили в безопасное состояние прежде, чем оператор столкнется с ними;
c) обеспечение дополнительных мер защиты, таких как информация по использованию, обучение, предупреждающие символы и сигналы, персональные защитные приспособления и т.д.
Требования, установленные в разделе 5, были сформулированы в результате итерационного процесса по применению мер снижения рисков в соответствии с ИСО 12100 к опасностям, указанным в приложении А. Интегратор должен обеспечить адекватное снижение рисков, идентифицированных при общей оценке рисков, с помощью применения требований из раздела 5. Если риски не снижены в достаточной мере, то должны быть применены дополнительные меры по снижению рисков до тех пор, пока риски не будут снижены в достаточной степени.
5 Требования безопасности и меры защиты
5.1 Общие положения
Интеграция робототехнических систем и роботизированных модулей должна соответствовать требованиям настоящего стандарта. Кроме того, роботизированный модуль или роботизированная линия должны быть спроектированы в соответствии с принципами, изложенными в ИСО 12100, для тех опасностей, которые не рассмотрены в настоящем стандарте (например, острые кромки). Конструкция робототехнической системы должна соответствовать эргономическим принципам для обеспечения того, чтобы с ней было удобно работать и обслуживать. Робототехническая система должна быть спроектирована так, чтобы обслуживающий персонал не подвергался опасностям.
Примечания
1 Не все опасности, идентифицированные в настоящем стандарте, относятся к любой робототехнической системе, а также уровень риска, связанного с конкретной опасной ситуацией, не одинаков для разных робототехнических систем.
2 Рекомендуемые методы верификации требований, установленных в данном разделе, определены в разделе 6.
5.2 Характеристики связанной с безопасностью системы управления (аппаратные средства и программное обеспечение)
5.2.1 Общие положения
Связанные с безопасностью системы управления (электрические, гидравлические, пневматические и программные) должны соответствовать 5.2.2, если только при общей оценке рисков не было установлено, что более подходящим является альтернативный критерий качества, представленный в 5.2.3. Характеристики связанных с безопасностью систем управления робототехнической системы и любого установленного оборудования должны быть четко указаны в информации по использованию.
Примечание - Связанные с безопасностью системы управления могут также называться связанными с безопасностью частями систем управления (СБЧ/СУ).
В настоящем стандарте характеристики связанных с безопасностью систем управления определены с помощью:
- уровней эффективности защиты (УЭЗ) и категорий, установленных в ИСО 13849-1:2006, 4.5.1;
- уровней полноты безопасности (УПБ) и требований к отказоустойчивости аппаратного обеспечения, установленных в МЭК 62061:2005, 5.2.4.
Эти два стандарта определяют функциональную безопасность, используя похожие, но разные методы. Требования этих стандартов должны применяться к соответствующим связанным с безопасностью системам управления, для которых они предназначены. Конструктор может выбрать для применения любой из этих стандартов. Данные и критерии, необходимые для определения характеристик связанных с безопасностью систем управления, должны быть приведены в информации по использованию.
Примечание - Сравнение ИСО 13849-1 и МЭК 62061 приведено в ИСО/ТО 23849.
Другие стандарты, предлагающие требования к альтернативным характеристикам, например к характеристике "надежность управления", используемой в Северной Америке, также могут быть использованы. При использовании таких альтернативных стандартов при проектировании связанных с безопасностью систем управления должен быть обеспечен эквивалентный уровень снижения рисков.
Любой сбой в связанной с безопасностью системе управления должен приводить к остановке категории 0 или 1 в соответствии с МЭК 60204-1.
5.2.2 Требования к характеристикам
Связанные с безопасностью части систем управления должны быть спроектированы так, чтобы они соответствовали УЭЗ=d с категорией конструкции 3, как определено в ИСО 13849-1:2006, или УПБ 2 с уровнем отказоустойчивости аппаратного обеспечения 1 и интервалом между контрольными испытаниями не менее 20 лет, как определено в МЭК 62061:2005.
В частности, сказанное выше означает следующее:
a) одиночный сбой в любой из этих частей не должен приводить к потере функции безопасности;
b) в случаях, когда это практически целесообразно, одиночный сбой должен быть выявлен при или перед следующим обращением к функции безопасности;
c) если произошел одиночный сбой, то всегда выполняется функция безопасности, а безопасное состояние должно поддерживаться до тех пор, пока выявленный сбой не будет исправлен;
d) все реально предсказуемые сбои должны выявляться.
Требования перечислений а)-d) считаются эквивалентными категории конструкции 3, определенной в ИСО 13849-1:2006.
Примечание - Требование выявления одиночного сбоя не означает, что все сбои будут выявлены. Следовательно, накопление невыявленных сбоев может привести к непланируемой реакции и опасной ситуации в машине.
5.2.3 Другие рабочие характеристики системы управления
По результатам тщательной общей оценки рисков, выполненной для робототехнической системы, и ее применения по назначению может быть определено, что для данного применения подходят характеристики связанной с безопасностью системы управления, отличающиеся от характеристик, определенных в 5.2.2.
Выбор одной из таких отличающихся рабочих характеристик, связанных с безопасностью, должен быть особо отмечен, и соответствующие ограничения и предупреждения должны быть включены в информацию по использованию, поставляемую с оборудованием, к которому относится данный выбор.
5.3 Конструкция и установка
5.3.1 Условия окружающей среды
Робототехническая система и меры защиты роботизированного модуля должны быть спроектированы с учетом условий окружающей среды, таких как температура, влажность, электромагнитные помехи, освещение и т.д. При этом могут быть выдвинуты некоторые требования к окружающей среде из-за наличия технических ограничений.
Робот, робототехническая система и компоненты роботизированного модуля должны быть выбраны так, чтобы выдерживать ожидаемые условия эксплуатации и внешней среды.
5.3.2 Размещение органов управления
Органы оперативного управления и связанное с ними оборудование (например, сварочный контроллер, пневмораспределители и т.д.), к которым требуется доступ во время автоматической работы, должны быть расположены вне защищенного пространства, чтобы человек, работающий с ними, находился за его пределами. Органы управления и оборудование должны быть расположены и спроектированы так, чтобы обеспечить ясную видимость ограниченного пространства робота.
5.3.3 Органы управления приводами
Органы управления приводами должны соответствовать требованиям МЭК 60204-1, а их конструкция - требованиям ИСО 10218-1. Робототехническая система не должна реагировать на любые внешние дистанционные команды или условия, которые могут вызвать возникновение опасных ситуаций.
5.3.4 Требования к питанию
Все источники энергии робота и другого оборудования (например, пневматической, гидравлической, механической, электрической) должны соответствовать требованиям, установленным изготовителями машин и их компонентов. Электрические установки должны соответствовать требованиям МЭК 60204-1. Гидравлические установки должны соответствовать требованиям ИСО 4413, а пневматические - ИСО 4414.
5.3.5 Требования к эквипотенциальному соединению/заземлению
Защитные и функциональные соединения должны соответствовать требованиям МЭК 60204-1.
5.3.6 Изоляция источников энергии
Должны быть обеспечены средства для изоляции опасных источников энергии, чтобы не подвергать опасности обслуживающий персонал. Данные средства должны быть заблокированы и/или защищены только при выключенном питании.
Робототехническая система должна иметь единое устройство отключения питания для каждого типа источника энергии. Для систем с большим числом роботов или больших установок может потребоваться несколько устройств отключения питания для каждого вида энергии. Диапазон управления для каждого из таких устройств должен быть четко указан поблизости от рукоятки отключающего устройства (например, в виде надписи или символа).
Примечание - Энергия в источниках может быть электрической, механической, гидравлической, пневматической, химической, термальной, потенциальной, кинетической и т.д.
5.3.7 Управление накопленной энергией
Должны быть обеспечены средства для контроля и/или управляемого выпуска накопленной опасной энергии. Должна быть нанесена метка, указывающая на опасность от данной накопленной энергии.
Примечания
1 Источниками накопленной энергии могут быть аккумуляторы воздушного или гидравлического давления, конденсаторы, аккумуляторы, пружины, противовесы, маховики, гравитация и т.д.
2 Нависающая степень подвижности может создать значительную опасность в зависимости от частоты и длительности нахождения вблизи нее (например, стояние под манипулятором робота при регулировке). Желательно, чтобы механические блокирующие или удерживающие системы управления, разработанные для защиты людей, подвергающихся опасности от накопленной опасной энергии, имели характеристики, определенные в 5.2.2 или 5.2.3 в зависимости от результатов общей оценки рисков.
5.3.8 Функции остановки робототехнической системы или роботизированного модуля
5.3.8.1 Общие положения
Любые робототехнические системы или роботизированные модули должны иметь функцию защитной остановки и независимую функцию аварийной остановки. Эти функции должны иметь возможность подключения дополнительных устройств защитной или аварийной остановки.
5.3.8.2 Функция аварийной остановки
Каждый пульт управления, способный инициировать движение или другие опасные функции, должен иметь инициируемую вручную функцию аварийной остановки, которая соответствует требованиям МЭК 60204-1 и ИСО 13850.
Приведение в действие функции аварийной остановки должно останавливать движение всех роботов и другие опасные функции в роботизированном модуле или на интерфейсе между модулями и другими областями рабочего пространства.
Робототехнические системы должны иметь единую функцию аварийной остановки, действующую на все части системы. В случае более крупных систем (например, состоящих из нескольких роботов или нескольких роботизированных модулей) может потребоваться разделение диапазона управления. В подобных случаях диапазон управления должен быть установлен в соответствии с требованиями задания (или заданий), которое должно быть выполнено, или характеристиками системы (например, конструкция оборудования, расположение защитного ограждения). Диапазон управления должен быть четко обозначен вблизи устройства аварийной остановки (например, в виде текста или символа).
Если ограниченные пространства двух или более роботов перекрываются либо если два или более роботов находятся в общем защищенном пространстве, то данное пространство должно быть одним рабочим пространством. Все устройства аварийной остановки для рабочего пространства должны иметь одинаковую зону контроля.
Зона контроля может охватывать несколько рабочих пространств. Информация по использованию должна содержать данные о зоне контроля для каждого устройства аварийной остановки.
Функции аварийной остановки робототехнической системы должны оставаться действующими даже в том случае, если пульт управления не работает.
Выбор функции остановки категории 0 или 1 в соответствии с МЭК 60204-1 должен быть определен на основании общей оценки рисков.
Функция аварийной остановки должна соответствовать по крайней мере требованиям из 5.2.2, если только при общей оценке рисков не было определено, что более подходящим является другой критерий.
Примечание - Некоторые цепи защитных остановок автоматически блокируются в ручном режиме и не могут подходить для подключения устройств аварийной остановки.
В том случае, если в системе управления имеется выходной сигнал аварийной остановки, то:
- данный выходной сигнал должен продолжать выдаваться при отключении питания робототехнической системы, или
- если данный выходной сигнал не выдается при отключении питания робототехнической системы, то должен генерироваться сигнал аварийной остановки.
5.3.8.3 Защитная остановка
Робототехническая система должна иметь одну или несколько функций защитной остановки, разработанных для подключения внешних защитных устройств. Выбор функции остановки категории 0 или 1 в соответствии с МЭК 60204-1 должен быть определен на основании общей оценки рисков.
Остановка категории 2 может быть применена в том случае, если внешняя система силового привода соответствует МЭК 61800-5-2.
Данная функция защитной остановки должна вызывать остановку движения всей робототехнической системы и прекращение выполнения любых других опасных функций, управляемых данной робототехнической системой. Данная остановка может быть инициирована вручную или с помощью управляющей логики.
Характеристики функции защитной остановки должны соответствовать требованиям, установленным в 5.2.2 или 5.2.3.
5.3.9 Выключение сопряженного оборудования
Робототехническая система должна быть установлена так, чтобы выключение сопряженного с ней оборудования не создавало опасности или опасного состояния.
5.3.10 Требования к рабочему органу (инструменту на конце манипулятора)
Рабочие органы должны быть сконструированы и спроектированы так, чтобы:
a) отключение или изменение подачи энергии (например, электрической, гидравлической, пневматической, вакуумной) не вызывало высвобождения груза, которое могло бы создать опасную ситуацию;
b) статические и динамические силы, создаваемые совместно грузом и рабочими органами, находились в пределах грузоподъемности и динамических характеристик робота;
c) концевая площадка кисти (монтажный фланец) и присоединяемые к ней принадлежности правильно стыковались (соединялись);
d) присоединяемые инструменты были надежно закреплены при использовании;
e) отсоединение инструмента происходило только в предназначенных для этого местах или при особых контролируемых условиях, если данное отсоединение может привести к опасной ситуации;
f) рабочий орган выдерживал воздействие ожидаемых усилий на протяжении срока службы.
Когда это осуществимо, питание может подаваться на рабочие органы для поиска неисправностей без передачи кинетической энергии на приводы робота.
Примечание - Данная возможность может быть полезной опцией, предоставляемой изготовителями роботов. Однако она не является обязательным требованием в ИСО 10218-1.
Информация по использованию должна содержать намеченный срок службы рабочих органов, основанный на предполагаемых параметрах при нормальной работе, в том случае, если отказ рабочего органа может создать потенциально опасные условия.
До начала работы робототехнической системы центральная точка инструмента (ЦТИ) робота должна быть отрегулирована с помощью компенсационных средств, предоставленных изготовителем робота. При этом должны быть предприняты меры по предотвращению создания опасных условий (например, использование механически защищенных пневматических и вакуумных шлангов и самофиксирующихся устройств, таких как подпружиненные дополнительные фиксаторы).
5.3.11 Процедура аварийного восстановления
Информация по использованию должна содержать подробные инструкции по устранению неисправностей связанного с робототехнической системой оборудования наряду с инструкциями изготовителя робота по аварийному или аномальному перемещению робота без питания приводов. Если при этом требуются предупреждающие знаки или надписи, то они должны быть нанесены либо предоставлены инструкции по их нанесению.
5.3.12 Предупреждающие знаки
Если видимость предупреждающих знаков на роботе или другом оборудовании системы затрудняется при установке или интеграции, то должны быть обеспечены другие предупреждающие средства с аналогичной эффективностью (например, нанесение других предупреждающих знаков на видимых местах).
5.3.13 Освещение
Необходимый уровень освещения рабочего пространства должен быть определен и специфицирован в информации по использованию.
Робототехническая система должна быть снабжена встроенным освещением для нормальной работы, если его отсутствие может создать риск, несмотря на общее освещение нормальной интенсивности. Робототехническая система должна быть сконструирована и построена так, чтобы не существовало ни затененных зон, способных вызвать неудобство, ни раздражающего ослепляющего света, ни опасного стробоскопического эффекта на движущихся частях из-за освещения. Внутренние элементы, требующие частой проверки и регулировки, а также зоны технического обслуживания должны быть обеспечены достаточным освещением. Уровень освещенности в зонах, требующих частой проверки и регулировки, должен быть не менее 500 лк (см. ИСО 8995-1).
Примечание - К зонам, для которых важно освещение, относятся рабочие места, места подачи материальных объектов и т.д.
5.3.14 Опасности, связанные с применением
При интеграции робототехнической системы необходимо также учитывать опасности, связанные с данным применением (например, наличие паров, газов, химикатов, горячих объектов), которые определяются технологическим процессом и способом обработки (например, сварка, лазерная резка, механообработка).
Требования к интерфейсам с другими машинами должны соответствовать руководству изготовителя, представленному в информации по использованию.
5.3.15 Деблокирующие устройства
Выносной пульт управления и дополнительные деблокирующие устройства и их интеграция должны соответствовать ИСО 10218-1 (дополнительная информация приведена в приложении D).
Если требуется, чтобы несколько человек были защищены в защищенном пространстве, то у каждого из них должно быть деблокирующее устройство. Все деблокирующие устройства, связанные с управлением одним роботом, должны иметь одинаковую функциональность (зону контроля).
Если персонал может оказаться в опасной ситуации при выполнении ручных операций (например, находиться в ограниченном пространстве настраиваемого робота, имеющего перекрывающиеся ограниченные пространства, во время работы со вспомогательным оборудованием или с другим роботом), то системы управления должны быть так связаны между собой, чтобы деблокирующие устройства управляли всеми опасностями в пространствах данного роботизированного модуля.
Взаимосвязанные опасные функции машин должны требовать отдельного действия по перезапуску после того, как ими управляло (останавливало) деблокирующее устройство.
Примечания
1 Диапазон управления взаимосвязанного деблокирующего устройства зависит от размещения, пространства, предполагаемых заданий и предполагаемого расположения рабочих пространств для этих заданий. Должны быть разработаны меры, соответствующие 5.2.2, для того чтобы роботы с перекрывающимися рабочими пространствами были одновременно активны при выполнении ручных операций.
2 Наблюдение за технологическим процессом представлено в приложении F.
5.4 Ограничение движения робота
5.4.1 Общие положения
Установка робота должна быть спроектирована и интегрирована так, чтобы снизить воздействие потенциальных опасностей на персонал. Робототехнические системы могут иметь потенциально большой рабочий объем (максимальное пространство), в частности при работе с большими объектами. Размещение периметровых ограждений для защиты людей от опасностей, создаваемых робототехнической системой (создание защищенного пространства), на таких максимальных расстояниях может привести к огораживанию необоснованно большого пространства, которое превышает пространство, необходимое роботам для выполнения заданий (рабочее пространство). Для того чтобы уменьшить размеры защищенного пространства, максимальное пространство должно быть ограничено с помощью интегрированных или внешних устройств, которые ограничивают движение робототехнической системы (ограниченное пространство).
5.4.2 Создание защищенного и ограниченного пространств
Защищенное пространство должно быть создано с помощью периметрового ограждения. Оно должно быть сформировано при правильном учете местоположения и размещения машин и опасностей внутри защищенного пространства.
Ограниченное пространство робототехнической системы должно быть создано с помощью средств, ограничивающих движение робота, рабочего органа, приспособлений и обрабатываемой детали. Ограниченное пространство должно быть меньше максимального пространства. Ограниченное пространство должно располагаться внутри защищенного пространства и должно быть максимально приближено к размерам рабочего пространства, насколько это практически осуществимо.
Периметровые ограждения не должны устанавливаться по отношению к опасности ближе границ ограниченного пространства. Если периметровое ограждение сконструировано так, чтобы выполнять функции ограничивающего устройства в соответствии с 5.4.3, то данное периметровое ограждение формирует часть границы как для защищенного, так и для ограниченного пространства.
Дополнительные ограждения могут потребоваться для рабочих мест оператора (например, для места загрузки деталей). Динамическое ограничение (см. 5.4.4), взаимосвязанные и другие ограждения могут использоваться для того, чтобы обеспечить невозможность подвергания оператора опасностям на рабочем месте.
5.4.3 Средства для ограничения движения
Ограничение движения робототехнической системы может быть осуществлено с помощью средств, интегрированных в робот (например, программное ограничение с расчетной безопасностью степеней подвижности и рабочего пространства или жесткие упоры, установленные изготовителем), установки внешних ограничивающих устройств или комбинации обоих методов. Ограничивающие средства используются для ограничения пространства, в котором робот может выполнять свое задание, т.е. ограниченное пространство создается меньше максимального пространства с помощью ограничивающих устройств.
Ограничивающие устройства могут быть двух типов: механические ограничивающие устройства и немеханические ограничивающие устройства. Механические ограничивающие устройства физически ограничивают перемещение робота за заданные границы. Немеханические ограничивающие устройства не ограничивают сами движения робота, но вызывают остановку с помощью системы управления роботом. Поэтому немеханические ограничивающие устройства требуют, чтобы интегратор учитывал расстояние, необходимое для остановки робота, при создании ограниченного пространства робота.
Любые связанные с безопасностью органы управления, подключенные к управлению роботом, должны соответствовать требованиям ИСО 10218-1.
Ограничивающие устройства должны быть правильно настроены и закреплены. Если метод ограничения диапазона движения заложен в конструкцию, то он должен соответствовать одному из следующих требований:
- если используются механические упоры, то они должны соответствовать требованиям ИСО 10218-1 к ограничивающим устройствам и, если применимо, требованиям к устройствам динамического ограничения;
- если используются альтернативные методы ограничения диапазона движения, то они должны быть сконструированы, построены и установлены так, чтобы соответствовать по крайней мере требованиям для ограничения степеней подвижности из ИСО 10218-1. Данные методы должны соответствовать по крайней мере требованиям из 5.2.2, если только при общей оценке рисков не было определено, что должен быть выбран другой критерий. Расстояние, необходимое для остановки и связанное с ограничивающими средствами, должно быть учтено при расчете ограниченного пространства. Информация и характеристики, касающиеся времени и расстояния, которые необходимы для остановки робота, приведены в ИСО 10218-1.
При использовании немеханических ограничивающих устройств, включая программное ограничение с расчетной безопасностью степеней подвижности и рабочего пространства (см. ИСО 10218-1), ограниченное пространство должно определяться для робота с реальной нагрузкой. Если скорость робота ограничена с помощью системы оперативного контроля, соответствующей требованиям 5.2.2, то ограниченное пространство может быть создано на основе сконфигурированного ограничения скорости. В противном случае ограниченное пространство должно быть создано на основе максимальной скорости робота.
Если робот имеет встроенное программное ограничение с расчетной безопасностью степеней подвижности и рабочего пространства, которое используется согласно инструкциям изготовителя, то информация о программных ограничениях, установленных с помощью данного средства, должна быть приведена в информации по использованию.
В тех случаях, когда периметровое ограждение выполняет функции ограничивающего устройства, результаты общей оценки рисков должны быть использованы для определения требований к конструкции, прочности и деформируемости данного ограждения.
Примечания
1 Для роботов, способных корректировать скорость в зависимости от реальной нагрузки, возможно использование максимальных параметров, если робот перемещает груз менее номинальной нагрузки.
2 Ограниченное пространство определяют по тому, где движение робота может реально остановиться, а не по тому, где остановка была инициирована. Это может быть точно определено с помощью механических ограничивающих устройств (например, жестких упоров). При размещении немеханических ограничивающих устройств необходимо учитывать время их активизации и расстояние, необходимое для остановки робота. Это относится и к конфигурациям связанного с безопасностью программного обеспечения задания оси и ограничения рабочего пространства робота.
3 Устройства, разработанные для защиты машины (например, защита от перегрузки по току и датчики столкновения), не подходят в качестве ограничивающих устройств, если только они не сконструированы, протестированы и определены специально для использования как устройства обеспечения безопасности для целей ограничения движения в соответствии с ИСО 10218-1.
4 Использование периметрового ограждения в качестве ограничивающего устройства обычно осуществимо только в тех случаях, когда роботы не могут вызвать опасных деформаций ограждения.
5.4.4 Динамическое ограничение
Динамическое ограничение - это автоматически контролируемое изменение ограниченного пространства робототехнической системы при выполнении части цикла работы робототехнической системы. Управляющие устройства, такие как, но не ограниченные ими, кулачковые конечные выключатели, световые завесы или управляемые выдвижные жесткие упоры, могут быть использованы для дополнительного ограничения движений робота в ограниченном пространстве при выполнении роботом программы задания. Для этого механические ограничивающие устройства должны быть способны остановить движение робота в условиях номинальной нагрузки и скорости. Соответствующие связанные с безопасностью системы управления должны соответствовать требованиям из 5.2.
Расположение динамически ограниченных пространств должно быть определено в информации по использованию. Для немеханических ограничивающих устройств они должны быть определены как границы пространств, в которых инициируется остановка, так и пространств, в которых робот окончательно останавливается (ограниченное пространство).
Примечание - Динамическое ограничение может быть полезно при разработке двух альтернативно выбираемых ограниченных пространств для повышения производительности роботизированного модуля с помощью одного робота, обслуживающего два рабочих места.
5.5 Размещение
5.5.1 Периметровое ограждение
Периметровое ограждение должно быть реализовано с использованием ограждений или чувствительного защитного оборудования в соответствии с 5.10. При выборе защитных устройств необходимо учитывать:
- предполагаемые рабочие нагрузки;
- влияние обрабатываемого материального объекта, особенно при подаче и удалении материальных объектов из робототехнической системы;
- другие влияющие внешние факторы (например, очень запыленная атмосфера исключает использование оптоэлектронных защитных устройств).
Безопасные расстояния снаружи и внутри механического ограждения должны соответствовать требованиям ИСО 13857. Минимальные расстояния от блокирующих ограждений и других устройств автоматического выключения должны соответствовать требованиям ИСО 13855. Если возможность смятия предотвращается с помощью поддержания минимальных зазоров, то они должны соответствовать требованиям ИСО 13854.
5.5.2 Доступ для вмешательства оператора
При установке робототехнической системы должна быть выполнена основанная на решаемых задачах общая оценка рисков для конкретной установки и планируемых задач для того, чтобы определить возможные места захватывания или защемления в пределах ограниченного пространства робота.
Задачи, требующие ручного управления на высокой скорости, должны выполняться при наименьшем зазоре 500 мм. Данный зазор необходим между расчетным местом остановки робота в случае опасности и пространствами, в которых располагаются части здания, конструкции, периметровое ограждение, приспособления, другие машины и оборудование, не предназначенные для поддержки функционирования робота, но которые могут вызвать захватывание или защемление (см. ИСО 13854).
Пример - Поддержка функционирования робота может осуществляться с помощью фиксаторов, загрузочной станции, оборудования для работы с материальными объектами и оборудованием, связанным с технологическим процессом.
Если это осуществимо, то размещение должно быть спроектировано так, чтобы обеспечить выполнение задач оператором извне защищенного пространства. При необходимости выполнения задач внутри защищенного пространства должен быть обеспечен безопасный и адекватный доступ к местам выполнения задач. Пути и средства доступа не должны подвергать оператора опасностям, включая опасности скольжения, спотыкания и падения.
При разработке обеспечения доступа оператора внутрь защищенного пространства необходимо рассмотреть, например, следующее:
- кабельные каналы и другие места, где можно споткнуться;
- частоту необходимого доступа для загрузки/разгрузки;
- физические характеристики груза;
- зоны нахождения и наблюдения;
- позиции технического обслуживания (например, для замены инструмента);
- легкодоступные средства технического обслуживания (например, вне защищенного пространства).
Должны быть предоставлены постоянные средства доступа с учетом частоты доступа и эргономических аспектов задачи.
Органы управления (например, пульты управления, шкафы управления) роботом должны располагаться вблизи средств доступа для того, чтобы облегчить их использование операторами. Если электрическое оборудование, содержащее элементы, которые требуют доступа (например, для планового обслуживания), установлено выше уровня, до которого можно легко добраться (например, на верхней крышке машины), то должны быть обеспечены необходимые средства доступа к ним (например, рабочий помост). Результаты общей оценки рисков должны использоваться для определения необходимых средств доступа к устройствам, находящимся на высоте от 400 до 2000 мм от уровня доступа (см. также МЭК 60204-1).
Шкафы электрического оборудования должны быть расположены так, чтобы их дверцы могли быть полностью открыты, а пути отхода были всегда доступны даже при открытых дверцах. Данное требование выполняется, если:
a) дверцы могут быть легко возвращены в закрытое положение с учетом направления отхода;
b) остающийся зазор при полностью открытой дверце составляет не менее 500 мм (см. также МЭК 60364-7-729).
Выбор и конструкция помостов, мостков, ступеней, стремянок и закрепленных лестниц должны соответствовать относящимся к ним частям ИСО 14122.
Ограждения должны быть обеспечены для того, чтобы воспрепятствовать доступу оператора между модулями или перевести опасности в соседних модулях в безопасное состояние до того, как оператор сможет подойти к ним.
Ограждения должны быть поставлены для того, чтобы снизить риски для оператора, вызванные перемещением материальных объектов в и из соседних модулей.
5.5.3 Погрузо-разгрузочные работы
Опасности, связанные с погрузо-разгрузочными работами (например, запутанность, падение материальных объектов, разрыв соединений робототехнической системы), должны быть рассмотрены при общей оценке рисков.
Если материальные объекты поступают или выводятся из защищенного пространства, то должны быть приняты меры по предотвращению неожиданного появления людей в опасной зоне. Данные меры должны либо не допускать контакта людей с опасностями, либо переводить опасности в безопасное состояние до возможного контакта с ними без создания дополнительных опасностей. Габариты окон должны быть уменьшены до минимального размера, необходимого для прохода материальных объектов (см. 5.10.7).
5.5.4 Наблюдение за технологическим процессом
Наблюдение за технологическим процессом должно осуществляться из-за пределов защищенного пространства. Это может быть реализовано с помощью создания безопасных мест для пребывания и наблюдения (например, помостов, подиумов, систем дистанционного наблюдения), которые должны быть определены по результатам общей оценки рисков.
Если наблюдение за технологическим процессом может осуществляться только внутри защищенного пространства, то должны использоваться режимы работы, соответствующие 5.6.4.2 и 5.6.4.3. Если данные рабочие режимы невозможны, то должен быть реализован отдельный режим управления, который должен обеспечить защиту, необходимую для того, чтобы оператор, наблюдающий за технологическим процессом, не попадал в опасную ситуацию. Дополнительная информация приведена в приложении F.
5.6 Применение режимов работы робототехнической системы
5.6.1 Общие положения
В роботизированном модуле, включающем несколько робототехнических систем, режим работы может быть выбран индивидуально для каждой робототехнической системы или общим для всех взаимосвязанных робототехнических систем модуля. Если режим работы выбирается индивидуально для каждой робототехнической системы, то не требуется, чтобы все робототехнические системы были переведены в режим ручного управления. Роботы, которые не управляются в ручном режиме, должны оставаться в безопасном состоянии, независимо от выбранного режима работы, и не создавать опасность.
К робототехнической системе или роботизированному модулю предъявляются приведенные ниже требования. К этим требованиям не относятся требования к оборудованию, входящему в состав роботизированного модуля, но которое не требуется для выполнения роботами своего задания. Общая оценка рисков должна быть проведена для определения любых дополнительных мер, которые должны быть предприняты из-за наличия рисков, создаваемых данным оборудованием. Настоятельно рекомендуется, чтобы во время работы робототехнической системы в режиме ручного управления все остальное оборудование, не требующееся для выполнения задания роботом, было переведено и поддерживалось в безопасном состоянии.
5.6.2 Выбор режима
Несанкционированный и/или случайный выбор режима должен быть предотвращен с помощью подходящих средств.
Данные средства должны только разрешать выбранный режим, но не должны сами инициировать работу робототехнической системы или выполнение других опасных операций связанных с ней машин. Для инициирования работы робототехнической системы необходимо выполнить отдельное действие.
Должна быть обеспечена однозначная индикация выбранного режима работы.
Изменение режима работы не должно создавать опасную ситуацию.
5.6.3 Автоматический режим
5.6.3.1 Общие положения
Вход человека в защищенное пространство при работе в автоматическом режиме должен вызывать защитную остановку всего оборудования, которое может создавать опасность или опасную ситуацию.
5.6.3.2 Выбор автоматического режима
Выбор автоматического режима работы робототехнической системы (или систем) не должен прерывать или сбрасывать условие защитной или аварийной остановки.
Выбор автоматического режима должен быть осуществлен извне защищенного пространства. При использовании выносного пульта управления или пульта обучения для выбора автоматического режима требуется отдельное преднамеренное действие извне защищенного пространства для инициирования работы в автоматическом режиме.
Переключение из автоматического режима должно вызывать защитную или аварийную остановку.
5.6.3.3 Инициирование автоматического режима
Работа в автоматическом режиме должна быть инициирована извне защищенного пространства.
Инициирование автоматической работы должно быть возможным только тогда, когда все необходимые защитные средства находятся в рабочем состоянии.
5.6.3.4 Ручной сброс, запуск/перезапуск и неожиданный запуск
5.6.3.4.1 Запуск и перезапуск робототехнической системы должен быть понятным и простым действием. При запуске и перезапуске все необходимые функции обеспечения безопасности и/или меры защиты должны быть работоспособны.
Связанные с безопасностью функции управления должны соответствовать по крайней мере требованиям из 5.2.2, если только при общей оценке рисков не было определено, что должен быть использован другой критерий.
5.6.3.4.2 Должна быть обеспечена блокировка запуска для предотвращения автоматического запуска выполнения опасных операций при включении питания или при прерывании и восстановлении питания. Блокировка запуска должна сбрасываться сознательным действием человека.
Блокировка перезапуска должна быть обеспечена для автоматического перезапуска выполнения опасной операции после активации защитной функции или изменения режима работы роботизированного модуля.
Персонал должен быть защищен от запуска или перезапуска роботизированного модуля, если он находится внутри защищенного пространства, в соответствии с ИСО 14118.
Управление запуском и перезапуском должно осуществляться вручную извне защищенного пространства и не должно быть возможным изнутри защищенного пространства.
Функция ручного перезапуска должна соответствовать следующим требованиям:
- инициироваться с помощью отдельного управляемого вручную устройства, подключенного к связанным с безопасностью системам управления;
- инициироваться только тогда, когда все функции обеспечения безопасности и меры защиты находятся в рабочем состоянии;
- не вызывать движение или какую-либо опасную ситуацию;
- инициироваться с помощью сознательного действия;
- разрешать системе управления принимать отдельную команду запуска;
- выполняться при отключенном от питания приводе.
С каждого места, с которого осуществляется управление, оператор должен иметь возможность убедиться, что никого нет в защищенном пространстве. Расположение органов управления запуском и перезапуском должно обеспечивать ясный и беспрепятственный обзор защищенного пространства.
Если данное требование неосуществимо, то должно быть обеспечено наличие датчиков, фиксирующих присутствие операторов в пределах защищенного пространства.
5.6.3.4.3 Если оснастить модуль датчиками невозможно, то неожиданный запуск должен быть предотвращен с помощью других мер защиты, к которым относятся:
a) многочисленные средства изоляции и блокировки опасного оборудования, расположенного внутри защищенного пространства;
b) меры для обеспечения фиксации ограждения (калиток) в открытом состоянии;
c) дополнительные устройства сброса с ограничением по времени, расположенные внутри защищенного пространства.
Если указанные меры неосуществимы, то должен быть обеспечен аудиовизуальный предупреждающий сигнал перед запуском, который:
- достаточен для того, чтобы быть видимым и слышимым в пределах защищенного пространства;
- издается с интервалом выдержки перед запуском, длительность которого достаточна для того, чтобы операторы покинули защищенное пространство.
Достаточное число хорошо идентифицируемых устройств аварийной остановки должно быть расположено в защищенном пространстве так, чтобы ими можно было воспользоваться в течение интервала выдержки.
Примечание - Иерархия выбираемых мер защиты представлена в 4.5.
5.6.4 Ручной режим
5.6.4.1 Общие положения
Если требуется ручное вмешательство оператора, то локальное управление должно осуществляться с единого выносного пульта или аналогичного устройства управления, соответствующего требованиям ИСО 10218-1.
Примечание - Данное требование применимо к любому устройству, используемому для управления роботом из защищенного пространства при поданном питании на привод любой оси робота или рабочего органа. Это относится и к роботам с обучением методом проведения вручную по траектории при включенном питании при использовании органов управления, установленных на роботе, или основных/вспомогательных устройств управления обучением.
Если это осуществимо, то устройства управления и пульты управления должны быть расположены так, чтобы оператор мог видеть рабочее пространство или зону опасности.
Устройство управления остановкой должно быть расположено вблизи каждого устройства управления запуском.
Система должна быть сконструирована и построена так, чтобы инициирование движения или изменение выбора управления от любого другого источника было невозможно, если система находится под локальным управлением.
5.6.4.2 Ручное управление на сниженной скорости
При ручном управлении на сниженной скорости, скорость выбранной ЦТИ не должна превышать 250 мм/с. Должна быть обеспечена возможность выбирать скорости ниже 250 мм/с. По результатам общей оценки рисков должно быть определено, если требуется максимальная сниженная скорость менее 250 мм/с и если другое оборудование робототехнической системы требует работы также на сниженной скорости.
В режиме ручного управления на сниженной скорости движение робота или любого элемента робототехнической системы должно быть возможным только в сочетании с деблокирующим устройством в соответствии с ИСО 10218-1. Связанные с безопасностью рабочие характеристики деблокирующей функции должны соответствовать 5.2.
5.6.4.3 Ручное управление на высокой скорости
Данный режим предназначен для использования только для верификации программ и не должен использоваться в производственном процессе. Все перемещения в ручном режиме должны осуществляться на сниженной скорости. Данный режим должен применяться только в исключительных обстоятельствах, когда приложение требует, чтобы робототехническая система работала в режиме ручного управления на высокой скорости. В режиме ручного управления на высокой скорости скорость выбранной ЦТИ может превышать 250 мм/с. Робототехническая система должна соответствовать требованиям работы в автоматическом режиме ИСО 10218-1, быть снабжена выносным пультом управления, соответствующим требованиям ИСО 10218-1, и содержать в информации по использованию требование, чтобы деблокирующее устройство выносного пульта было функционально протестировано на правильность работы до начала движения.
5.6.5 Дистанционный доступ для ручного вмешательства
Робототехническая система может иметь возможность подключения к сети (например, через ЛВС, модем и Интернет), которая обеспечивает дистанционный доступ для диагностики, технических консультаций, тестирования и т.д.
Если робототехническая система должна дистанционно управляться оператором, которого физически нет рядом с роботом (например, он находится в удаленном офисе), то должны выполняться следующие требования:
a) ручное дистанционное управление должно быть возможным только тогда, когда робототехническая система находится в ручном режиме;
b) в любой момент времени только один источник управления, локальный или удаленный, должен быть активен (единственная точка управления);
c) тип управления, указанный в перечислении b), не должен превалировать над локальным выбором и вызывать какую-либо локальную опасную ситуацию;
d) активизация функции ручного дистанционного управления должна быть возможна только с локального устройства управления;
e) все функции управляющего устройства, которые могут создать опасность (например, движение робота, выдача сигналов, управляющих опасным оборудованием, изменение значений, опасно влияющих на робот, подтверждение функций обеспечения безопасности, продолжение движения и т.д.), должны быть доступны только с одного выбранного источника управления;
f) не должна существовать возможность дистанционного изменения параметров, связанных с ограничением движений робота с помощью связанного с безопасностью программного обеспечения задания оси и ограничения пространства, описанных в 5.4.3, без локального действия, подтверждающего допустимость данного изменения и отсутствие создаваемой им опасности;
g) индикация на локальном устройстве управления (панели управления, выносном пульте обучения и т.д.) должна показывать, что робототехническая система находится в режиме дистанционного управления;
h) ручное вмешательство оператора должно быть возможным только в том случае, если робототехническая система находится в режиме ручного управления на сниженной скорости;
i) если никого нет в защищенном пространстве и защитные средства функционируют, то дистанционные функции могут выполняться без каких-либо локальных действий;
j) если требуется, чтобы человек находился в защищенном пространстве, то функции управления от дистанционного оператора, которые могут создать опасность, должны выполняться только в том случае, если локальный оператор разрешает данную функцию, нажимая на деблокирующее устройство;
k) любое оборудование, которое не требуется для дистанционного управления, но которое может создать опасность, должно поддерживаться в безопасном состоянии.
Информация по использованию должна содержать необходимые требования по обучению дистанционного и локального операторов выполнению заданий в режиме дистанционного управления.
5.7 Выносные пульты управления
5.7.1 Общие положения
Выносные пульты управления и устройства управления обучением, используемые внутри защищенного пространства, должны соответствовать требованиям ИСО 10218-1.
Функция аварийной остановки на выносном пульте управления должна соответствовать 5.3.8.2.
Выносные пульты обучения, снабженные кабелем, должны иметь кабель достаточной длины, чтобы обеспечить оператору выполнять предполагаемые задания безопасным способом (например, не переступать через оборудование, чтобы достичь нужного места для обучения из-за недостаточной длины кабеля). Кабель должен соответствовать предполагаемым условиям окружающей среды в том месте, где он должен использоваться.
Предоставление надлежащего хранения выносного пульта должно быть организовано так, чтобы минимизировать возможность его повреждения, которое может создать опасность. Хранение отсоединяемых выносных пультов или бескабельных пультов должно минимизировать вероятность ошибочного принятия неработающего устройства аварийной остановки вместо работающего.
5.7.2 Требования для бескабельных или отсоединяемых пультов и к связи
При использовании бескабельных или отсоединяемых пультов обучения для робототехнической системы должны применяться следующие требования:
a) выносной пульт (пульты) должен соответствовать ИСО 10218-1;
b) функция аварийной остановки и деблокирующее устройство на выносном пульте должны соответствовать требованиям ИСО 10218-1;
c) возможность случайного управления робототехнической системой должна быть предотвращена с помощью:
1) средств однозначной идентификации управляемого робота;
2) средств соединения, обеспечивающих целостность связи (например, использование логина, кодирования, средств защиты от несанкционированного доступа);
3) средств для однозначной индикации непрерывности соединения (например, экранного индикатора);
d) один бескабельный пульт обучения не должен одновременно быть соединен более чем с одной робототехнической системой;
e) при ручном режиме управления потеря связи (например, выход за пределы досягаемости, потеря мощности аккумулятора) любым активным выносным пультом должна вызывать защитную или аварийную остановку всего управляемого оборудования; восстановление связи не должно вызывать перезапуск системы без выполнения отдельного сознательного действия (см. ИСО 10218-1 и МЭК 60204-1);
f) должны быть обеспечены однозначные средства для отключения управления роботом от выносного пульта (например, подтверждающее действие оператора), а когда устройства завершают сеанс работы, это должно быть четко распознаваемо, чтобы соответствующие функции обеспечения безопасности не были бы больше активны; путаница между активными и неактивными устройствами аварийной остановки должна быть преодолена с помощью использования надлежащего хранения или конструкции; информация по использованию должна содержать описание такого хранения или конструкции;
g) выносной пульт должен обеспечивать единую точку управления в соответствии с ИСО 10218-1.
5.7.3 Управление одновременным движением
Один выносной пульт может управлять одновременным движением системы, состоящей из нескольких роботов. Каждый робот должен быть выбран прежде, чем он будет активизирован. Для того чтобы быть выбранными, все роботы должны находиться в одном режиме работы (например, в режиме ручного управления на сниженной скорости). Индикация того, какие роботы будут активизированы (выбраны для движения), должна быть обеспечена в соответствии с ИСО 10218-1. Только выбранные роботы должны быть активизированы. Любой невыбранный робот в данной системе не должен двигаться и не должен представлять опасность с помощью средств, определенных в 5.2.2.
Примечание - Последнее требование может быть обеспечено с помощью продолжения пребывания в состоянии защитной остановки.
5.7.4 Ручное проведение по траектории робототехнических систем (совместно работающих роботов)
Робототехнические системы, спроектированные для совместной с человеком работы, могут использовать органы управления для ручного проведения по траектории при выполнении совместной части задания. Эти же органы управления могут быть использованы при обучении методом проведения. При наличии подобных органов управления они должны соответствовать требованиям ИСО 10218-1.
5.8 Техническое обслуживание и ремонт
5.8.1 Общие положения
Робототехническая система должна быть спроектирована так, чтобы предусматривались процедуры по проверке и техническому обслуживанию с целью обеспечения непрерывной безопасной работы робота и робототехнической системы. Программа проверки и технического обслуживания должна учитывать рекомендации изготовителя.
Информация по использованию должна содержать требования по периодическому функциональному тестированию связанных с безопасностью элементов оборудования (например, устройства аварийной остановки, деблокирующего устройства) с целью обеспечения правильной работы.
5.8.2 Требования к ограждению для технического обслуживания
Робототехническая система должна быть спроектирована и построена так, чтобы обеспечить безопасный доступ ко всем пространствам, в которых требуется вмешательство оператора во время работы, наладки и технического обслуживания. Рекомендуется, чтобы техническое обслуживание выполнялось извне защищенного пространства. Если требуется производить техническое обслуживание внутри защищенного пространства, то выбор предпочтительных средств защиты должен быть произведен из следующих рекомендаций:
a) система должна быть обеспечена локальными средствами контроля и изоляции опасной энергии (например, разъединителями, устройствами сброса давления, системой управления изоляцией энергии); информация по использованию должна содержать подробное описание задач технического обслуживания, которые требуют контроля и изоляции энергии и которые предупреждают, когда опасная энергия может потребоваться;
b) должны быть обеспечены эффективные альтернативные меры защиты для небольших задач по обслуживанию, которые намечаются и являются неотъемлемой частью производства, выполняемых без отключения энергии; меры по контролю опасной энергии или мониторингу позиции включают одно из следующего:
1) ограждение, предназначенное для безопасного выполнения задания;
2) размещение оборудования в заранее определенных безопасных контролируемых позициях или условиях (отклонения от которых должны вызывать состояние защитной остановки);
3) обеспечение всеобъемлющего контроля персонала, входящего в защищенное пространство (процедуры для всеобъемлющего контроля должны быть определены и представлены в информации по использованию);
4) обеспечение особого режима работы, соответствующего по крайней мере требованиям 5.2.2, для конкретных задач.
5.8.3 Ограждение мест доступа для технического обслуживания
При использовании ограждений мест доступа для технического обслуживания и уборки данные ограждения должны быть достаточного размера для того, чтобы обеспечить легкий доступ для необходимого инструмента, материалов и персонала.
Если применяются стационарные ограждения при нечастой необходимости технического обслуживания и уборки, то они должны сниматься только с использованием необходимого инструмента.
При необходимости частого доступа для выполнения работ по техническому обслуживанию и плановому уходу места доступа должны быть защищены с помощью защитных устройств, предпочтительно, с помощью съемных ограждений. Такие съемные ограждения должны блокировать команду запуска при входе человека в защищенную зону.
Если существует возможность присутствия человека в защищенной зоне при установленном съемном ограждении, то должны быть применены дополнительные меры по предотвращению перезапуска робота, которые могут включать блокировку перезапуска, использование датчиков присутствия человека или средства блокировки признака перевода ограждения из снятого состояния. Если используется блокировка перезапуска в сочетании с датчиками присутствия человека, то в зависимости от результатов общей оценки рисков датчики присутствия человека должны соответствовать как минимум требованиям типа 2 по МЭК 61496-1.
5.8.4 Ограждение соседних модулей при техническом обслуживании
При использовании электрочувствительного защитного оборудования (ЭЧЗО) с вертикальными полями детектирования для предотвращения непреднамеренного доступа к соседним модулям из модуля, в котором выполняется техническое обслуживание, скорость приближения и коэффициент проницаемости, используемые для калибровки минимального (безопасного) расстояния, могут, основываясь на результатах общей оценки рисков, отклоняться от значений, установленных в ИСО 13855.
Примечание - Если вместо ЭЧЗО используется стационарное ограждение, то соответствующие требования определены в 5.10.6.1.
5.9 Интерфейс с интегрированной производственной системой (ИПС)
5.9.1 Общие положения
Другие машины и оборудование, связанные с робототехнической системой, но не управляемые непосредственно контроллером робота, должны быть рассмотрены при общей оценке рисков, определении конфигураций размещения оборудования и ограждений и определении диапазона распространения управления, как это определено в ИСО 11161. Могут быть также применены и другие стандарты группы С, относящиеся к машинам и механизмам. При интеграции робототехнической системы должны быть также учтены опасности, контролируемые и не контролируемые роботом, но которые вызываются связанными с робототехнической системой машинами и оборудованием, которые находятся в защищенном пространстве или вносятся и выносятся из него.
5.9.2 Аварийная остановка
Робототехнические системы должны иметь одну функцию аварийной остановки, действующую на все надлежащие элементы машины. Функция аварийной остановки должна соответствовать 5.3.8.2.
Диапазон управления может распространяться на несколько пространств. В информации по использованию должны быть приведены сведения о диапазоне управления каждого устройства аварийной остановки.
5.9.3 Связанные с безопасностью элементы ИПС
Любые связанные с безопасностью интерфейсы управления между ИПС и робототехнической системой (системами) должны соответствовать требованиям 5.2.2. Защитные устройства должны защищать от столкновения с опасностями внутри каждого пространства ИПС и дополнительно в местах интерфейсов с соседними пространствами (например, на конвейерах), если они представляют опасность (см. также 5.10).
5.9.4 Локальное управление
Эксплуатационные требования должны определить необходимость локального управления. При использовании локального управления система управления ИПС должна учитывать это и не должна иметь возможность корректировать локальное управление. Функции аварийной и защитной остановки должны оставаться действующими при локальном управлении.
Средства выбора и отмены локального управления должны находиться в непосредственной близости от робота, машины или механизма, находящегося под локальным управлением. Средства отмены локального управления из пределов защищенного пространства не должны создавать опасные условия. Если локальное управление может быть отменено из пределов защищенного пространства, то отдельное подтверждение извне защищенного пространства должно быть введено до того, как могут возникнуть опасные условия.
5.9.5 Деблокирующее устройство
В случае необходимости дополнительных деблокирующих устройств они должны соответствовать 5.3.15. Функция деблокирующего устройства должна быть согласована с зонами ИПС, в которых встраиваемые робототехнические системы, машины или связанные с ними технологические процессы способны осуществлять одновременные движения при работе в ручном режиме.
5.9.6 Выбор режима
Выбор режима должен соответствовать требованиям ИСО 10218-1.
5.9.7 Создание пространств для выполнения задач
ИПС должна быть спроектирована так, чтобы облегчить безопасное вмешательство оператора для выполнения ручных операций, включая техническое обслуживание. При выполнении ряда ручных операций нецелесообразно останавливать работу всей ИПС, поэтому ИПС должна быть разделена на пространства, в которых оператор может безопасно выполнять свои задачи, в то время как остальная часть ИПС может функционировать в разных режимах эксплуатации.
Интеграция робототехнической системы в пространство для выполнения задач должна соответствовать ИСО 11161.
5.10 Обеспечение безопасности
5.10.1 Общие положения
Если конструкция не устраняет опасности или не снижает в достаточной степени риски, то должны быть применены средства защиты. Доступ в опасные зоны должен быть защищен с помощью средств защиты, таких как ограждения и защитные устройства. Дополнительные меры защиты, например персональное защитное оборудование, обучение и информация по использованию, также могут потребоваться. См. также 4.5.
Ограждения и защитные устройства могут использоваться для того, чтобы:
- не допустить контакта с опасностью (опасностями);
- обеспечить снижение опасности (опасностей) до контакта;
- предотвратить непреднамеренные действия;
- иметь в своем составе детали и инструменты;
- ограничивать другие опасности технологического процесса (шум, лазерное излучение, радиация и т.д.).
Ограждения и защитные устройства должны соответствовать требованиям ИСО 12100.
В ИСО 12100 определены и другие требования к выбору средств обеспечения безопасности и других дополнительных мер.
В приложении В приведен обзор стандартов, относящихся к защитным мерам.
5.10.2 Периметровая безопасность
Ограждения (расстояние или охват определены также в 5.10.4) или чувствительные защитные устройства (см. также 5.10.5) должны использоваться для обеспечения периметровой безопасности.
При выборе средств обеспечения периметровой безопасности должны быть учтены все опасности в пределах защищенного пространства, а не только опасности, связанные с робототехнической системой. Примерами опасностей являются:
a) другие машины, оборудование и технологические процессы;
b) падение или выбрасывание материальных объектов;
c) непредсказуемое или чрезмерное время остановки машины;
d) неспособность машины остановиться в части цикла;
e) опасности излучения (например, шум, вибрация, лучеиспускание, вредные вещества).
При выборе должны также учитываться требования к выполняемым задачам, например:
- частота доступа;
- загрузка и разгрузка материальных объектов;
- техническое обслуживание;
- контроль качества;
- близость к источнику опасности;
- требования технологического процесса.
5.10.3 Минимальные (безопасные) расстояния
5.10.3.1 Общие положения
Все средства обеспечения безопасности должны быть надежно установлены и расположены на таком расстоянии, чтобы до опасности нельзя было добраться, т.е. чтобы персонал не мог пройти ни над, ни под, ни вокруг и ни через данные средства.
5.10.3.2 Минимальные (безопасные) расстояния для ограждений
Стационарные и съемные ограждения должны соответствовать требованиям ИСО 14120, а их минимальное расстояние от любого источника опасности должно быть определено в соответствии с требованиями ИСО 13857. При предотвращении доступа с помощью ограждений, ИСО 13857 должен быть использован для определения минимального безопасного расстояния.
Минимальные расстояния, связанные с дверцами в ограждениях, должны соответствовать требованиям ИСО 13857.
5.10.3.3 Минимальные (безопасные) расстояния для защитных устройств
Минимальное расстояние для защитных устройств, реализующих функцию автоматического выключения (например, блокировочные устройства, чувствительное защитное оборудование, которое при срабатывании вырабатывает сигнал защитной остановки), должно быть определено в соответствии с требованиями ИСО 13855.
Если защитные устройства реализуют функцию определения присутствия человека для предотвращения запуска или перезапуска (например, если они непрерывно чувствуют присутствие человека или части тела человека в своей зоне детектирования и поддерживают защитную остановку), то к минимальному расстоянию требования не предъявляются, а такие устройства должны соответствовать 5.10.5.3.
Примечание - Если устройства обеспечения безопасности, определяющие присутствие человека, защищают исключительно от опасностей запуска или перезапуска, то другие устройства обеспечения безопасности используются для предотвращения доступа или снижения опасности до того, как доступ произойдет.
5.10.3.4 Минимальные (безопасные) расстояния для обеспечения необходимых зазоров
Если защитные устройства реализуют функцию автоматического выключения для обеспечения защиты от отсутствия необходимого зазора (см. 5.5.2), то минимальное расстояние должно рассчитываться с использованием ИСО 13855 при скорости приближения, равной скорости робота.
Если защитные устройства реализуют функцию определения присутствия человека для обеспечения необходимого зазора (см. 5.5.2), то к минимальному расстоянию требования не предъявляются, а такие устройства должны соответствовать 5.10.5.3.
5.10.4 Требования к ограждениям
5.10.4.1 Общие положения
Все ограждения должны соответствовать применимым к ним требованиям ИСО 12100 и ИСО 14120. Блокировочные устройства, связанные с ограждениями, должны соответствовать требованиям ИСО 14119.
Стационарные ограждения должны сниматься только с помощью инструментов. Их системы фиксации должны оставаться прикрепленными к ограждениям или к машинам, если ограждения снимаются. Требования не являются обязательными для стационарных ограждений, которые подлежат снятию только тогда, когда машинное оборудование, например, подлежит полному капитальному ремонту, является предметом больших переделок или демонтируется для переноса на другое место.
Периметровое ограждение не должно устанавливаться ближе к опасности, чем ограниченное пространство, если только не имеет место одно из двух:
- периметровое ограждение сконструировано так, чтобы выполнять функции ограничивающего устройства в соответствии с 5.4.3, или
- при общей оценке рисков установлено, что более подходит другое средство обеспечения безопасности.
5.10.4.2 Общие требования к расстоянию для стационарных ограждений
Проходы в любом стационарном ограждении не должны позволять человеку пройти над, под, вокруг или через (дверцу или проход) ограждение и добраться до опасности.
ИСО 13857 должен быть использован для определения необходимых размеров прохода от низа ограждения до ближайших препятствий и любых проходов в ограждении. Минимальные безопасные расстояния определены в 5.10.3.2.
Высота ограждения должна быть не менее 1400 мм от поверхности прохода.
5.10.4.3 Общие требования к съемным ограждениям с блокировочными устройствами
Блокировочные устройства, связанные со съемными ограждениями, должны соответствовать требованиям ИСО 14119.
Съемные ограждения в установленном положении должны препятствовать попаданию оператора в опасные зоны.
Съемные ограждения должны открываться в сторону или от опасности, но не в направлении защищенного пространства.
Блокировка должна быть обеспечена для того, чтобы привести любые опасности в безопасное состояние до того, как оператор может получить доступ к опасности, проходя через ограждение. Для того чтобы это обеспечить, съемные ограждения должны быть установлены в соответствии с ИСО 13855 (см. также 5.10.3.2).
Съемные ограждения, используемые для инициирования запуска при их закрытии (контрольные ограждения), должны соответствовать требованиям ИСО 14120.
Блокировочная функция должна соответствовать по крайней мере требованиям 5.2.2. Приводы возврата в исходное состояние должны соответствовать 5.6.3.4.
5.10.4.4 Общие требования к съемным ограждениям с блокировкой ограждения
Если у оператора существует возможность открыть съемное ограждение с блокировочным устройством и попасть в опасную зону прежде, чем опасность перейдет в безопасное состояние, то в добавление к контрольной блокировке должна быть обеспечена блокировка ограждения.
Блокировка ограждения должна соответствовать следующим требованиям:
a) она должна разрешать активизацию функций опасной машины до тех пор, пока ограждение установлено и заблокировано (например, закрыта дверца в ограждении);
b) она должна поддерживать ограждение в установленном и заблокированном состоянии до тех пор, пока существует риск от вреда вследствие выполнения опасных функций.
Если параметры технологического процесса, такие как скорость, используются в качестве условия для блокировки или разблокировки, то они входят составной частью в функцию обеспечения безопасности и должны соответствовать тем же требованиям функциональной безопасности, что и блокировочная функция.
5.10.4.5 Съемные ограждения, разрешающие доступ в защищенное пространство
Защищенное пространство должно быть спроектировано, построено или оснащено с применением средств предотвращения запирания человека внутри него. Например, это может быть реализовано с помощью организации ручного открывания съемных ограждений изнутри защищенного пространства, независимо от состояния источников питания, или использования средств блокировки дверей доступа в открытом состоянии.
5.10.5 Чувствительное защитное оборудование
5.10.5.1 Общие положения
Чувствительное защитное оборудование обычно используется, когда конкретное применение требует частого доступа, взаимодействия персонала с машинами, хорошей видимости машины или технологического процесса либо когда с эргономической точки зрения нельзя использовать стационарное ограждение. Однако некоторые характеристики конкретных условий применения могут исключать возможность использования чувствительного защитного оборудования как единственной меры защиты. Примерами таких характеристик являются:
a) существует вероятность того, что механизмы выбросят материалы, металлическую стружку или составные детали;
b) риск травм от теплового или другого излучения;
c) неприемлемые уровни шума;
d) окружающая среда может неблагоприятно воздействовать на функционирование защитного оборудования;
e) обрабатываемый материал может повлиять на эффективность мер защиты.
Там, где подобные ситуации существуют, могут потребоваться дополнительные или другие меры обеспечения безопасности.
ЭЧЗО, такое как световые завесы и лазерные сканеры, должны соответствовать относящимся к ним требованиям МЭК 61496-1.
Чувствительное к давлению защитное оборудование, такое как предохранительные коврики, ребра и бамперы, должно соответствовать требованиям ИСО 13856.
Применение данных устройств должно соответствовать МЭК/ТС 62046.
5.10.5.2 Чувствительное защитное оборудование, используемое для инициирования защитной остановки
Если чувствительное защитное оборудование используется для инициирования защитной остановки, то оно должно размещаться на расстоянии от каждого источника опасности, достаточном для обеспечения устранения опасности или его перевода в безопасное состояние прежде, чем любая часть тела приближающегося оператора войдет в контакт с данной опасностью.
Примечание - Опасности могут существовать в разных местах внутри защищенного пространства, и расстояние от них до защитного оборудования должно обеспечить контролируемость любой опасности.
Чувствительное защитное оборудование должно быть надежно установлено и расположено так, чтобы оператор не мог обойти (т.е. не мог пройти над, под, вокруг или через) зону детектирования и приблизиться к опасности. Должна быть обеспечена следующая функциональность:
a) защитная остановка должна инициироваться, если чувствительное защитное оборудование срабатывает при возникновении опасных условий;
b) после срабатывания опасные условия, защищаемые чувствительным защитным оборудованием, должны быть не в состоянии привести к опасному движению или ситуации до тех пор, пока чувствительное защитное оборудование не вернется в исходное состояние;
c) когда чувствительное защитное оборудование возвращается в исходное состояние, защищаемые им опасные условия могут оказывать воздействие, но возврат чувствительного защитного оборудования в исходное состояние сам по себе не инициирует их воздействие.
Формулы из ИСО 13855 должны использоваться для определения минимального расстояния от опасности (опасного пространства) до чувствительного защитного оборудования по всем направлениям приближения к ней.
Примечание - Минимальное значение параметра K, используемое для расчета минимальных расстояний, в соответствии с ИСО 13855 равно 1600 мм/с.
Если оператор или часть его тела может оставаться в защищенном пространстве, то должны быть обеспечены дополнительные меры по предотвращению возникающих опасных ситуаций, например, при неожиданном запуске. Подобные меры могут включать, например, следующие:
- обеспечение блокировки перезапуска;
- определение присутствия оператора в защищенном пространстве (например, с помощью ЭЧЗО или предохранительных ковриков) для поддержания состояния защитной остановки.
Примечание - Если используется чувствительное к присутствию человека защитное оборудование, то желательно обеспечить, чтобы операторы не могли обойти зону детектирования, например, взбираясь на части машинного оборудования.
Если у оператора имеется возможность спрятаться от обзора системы управления возвратом в исходное состояние, то должны быть обеспечены дополнительные меры защиты для предотвращения возврата в исходное состояние блокировки перезапуска (например, дополнительный контроль возврата в исходное состояние с ограничением по времени внутри защищенного пространства). Возврат в исходное состояние блокировки перезапуска должен осуществляться с помощью сознательного действия человека, например, приведения в действие исполнительного механизма вручную. См. также 5.6.3.3.
5.10.5.3 Чувствительное защитное оборудование, используемое для определения присутствия человека с целью предотвращения запуска
Если чувствительное защитное оборудование используется только для реализации функции определения присутствия человека (т.е. оно постоянно определяет присутствие человека или части его тела в зоне детектирования), то оно должно использоваться в сочетании с другими мерами обеспечения безопасности (например, блокирующими ограждениями), так как необходимо обеспечить, чтобы машина (машины) находилась в безопасном состоянии до того, как опасность может возникнуть.
Зона детектирования чувствительных к присутствию человека устройств должна быть расположена и сконфигурирована так, чтобы присутствие человека или части его тела определялось во всей зоне детектирования. В случае необходимости должны быть обеспечены дополнительные меры для обеспечения того, чтобы зона детектирования не могла быть обойдена, например, операторами, находящимися между зоной детектирования и опасным пространством, или при попадании в опасное пространство над зоной детектирования. Примерами мер по предотвращению нахождения людей между зоной детектирования и опасным пространством являются следующие:
- использование скользких поверхностей для предотвращения стояния на корпусе или основании машины;
- установка на поверхностях ограждений без выступающих частей, по которым можно было бы взобраться.
5.10.6 Обеспечение безопасности в зонах загрузки, разгрузки или обработки (зонах ручных операций)
5.10.6.1 Общие положения
Должны быть обеспечены меры для того, чтобы операторы не подвергались опасностям при выполнении ручных операций на интерфейсных рабочих местах (например, опасностям раздавливания, отрезания, запутывания).
Допустимые зазоры и проходы должны соответствовать 5.10.4.1. Рабочие места для ручных операций должны быть спроектированы так, чтобы оператор не мог подвергаться опасностям в пределах защищенного пространства. [См. также перечисления а), b) и с) ниже.]
Примечание - Требования к рабочим местам для совместной работы установлены в 5.11.
Для высоты ограждения до 1400 мм должны быть предприняты дополнительные меры защиты для того, чтобы:
a) не подвергать оператора связанным с данным применением опасностям в пределах защищенного пространства, например, выбрасываемым деталям, сварочным искрам и т.д.;
b) не допустить контакт оператора с опасностями внутри защищенного пространства или перевести данные опасности внутри защищенного пространства в безопасное состояние до того, как будет возможен контакт с ними;
c) обеспечить, чтобы в случае, если робототехническая система и оператор имеют доступ к одному (совместно используемому) рабочему пространству, то они не могли оказаться в данном пространстве одновременно. Это может быть реализовано с помощью:
1) недопущения того, чтобы любая часть робототехнической системы не могла оказаться в данном пространстве, в котором находится оператор, или приведения робототехнической системы в безопасное состояние до того, как она сможет столкнуться с оператором;
2) недопущения того, чтобы оператор мог войти в рабочее пространство, занятое любой частью робототехнической системы, или приведения робототехнической системы в безопасное состояние до того, как оператор сможет столкнуться с ней.
Примечание - По эргономическим соображениям высота ограждения от 1000 до 1400 мм может быть допустимой в зависимости от защитного эффекта, создаваемого формой ограждения, и результатов общей оценки рисков.
5.10.6.2 Дополнительные требования к подвижным рабочим местам для ручных операций
Подвижные рабочие места для ручных операций (например, вращающиеся поворотные столы, подвижные зажимные приспособления) могут сами по себе быть опасными. Должны быть предприняты меры по предотвращению контакта оператора с этими опасностями или приведению этих опасностей в безопасное состояние до того, как оператор может столкнуться с ними.
Зазор между подвижным рабочим местом и любыми стационарными элементами (например, частями машины, ограждениями), включая дополнительные меры защиты, не должен превышать 120 мм. Дополнительные меры могут потребоваться для предотвращения опасностей отрезания и затягивания.
5.10.6.3 Дополнительные требования к рабочим местам для ручных операций с совместно используемым рабочим пространством
При использовании устройства очувствления для определения присутствия оператора в совместно используемом рабочем пространстве зона детектирования этого устройства должна охватывать все совместно используемое рабочее пространство.
Если использование подобного устройства очувствления не представляется возможным, то должна быть обеспечена блокировка перезапуска. Другие меры должны быть предприняты для предотвращения нечаянного возврата в исходное состояние блокировки перезапуска с целью не допустить перемещения робототехнической системы в рабочее пространство, если в нем находится оператор. Данные меры могут включать обеспечение отдельного ручного возврата в исходное состояние.
Если используется ручной возврат в исходное состояние, то все совместно используемое рабочее пространство должно быть видно с места расположения устройства возврата в исходное состояние. Если это невозможно реализовать, то должны быть предприняты другие меры, например, дополнительное управление возвратом в исходное состояние с ограничением по времени внутри защищенного пространства.
5.10.7 Обеспечение безопасности проходов для материальных потоков
Проходы в защищенном пространстве, предназначенные для подачи и выдачи материальных объектов, должны иметь минимальные размеры, обеспечивающие только проход материальных объектов. Возможные опасности раздавливания/отрезания между материальным объектом и краями прохода должны быть устранены либо должны быть приняты дополнительные меры защиты для того, чтобы их избежать (например, с помощью использования навесных дверей с блокировкой).
Если возможен доступ к источнику опасности, то должны быть предприняты меры на основании общей оценки рисков для предотвращения доступа или определения присутствия человека или части его тела в опасной зоне и приведения данной опасности в безопасное состояние до того, как с ней может столкнуться человек. (Присутствие частей тела человека рассмотрено в ИСО 13857 и в приложении С.)
Если проходы для подачи и отвода материальных объектов защищены с помощью ЭЧЗО, то данное ЭЧЗО должно обеспечивать проход материальных объектов либо с помощью одной из следующих функций, и тогда доступ в защищенное пространство должен быть предотвращен самим материальным объектом, либо с помощью других средств (см. также МЭК/ТС 62046):
a) функции подавления, которая временно дезактивирует функцию ЭЧЗО, позволяя материальному объекту проходить через ограждение (при подаче/выдаче);
b) изменения в защищенном пространстве (например, гашение), которое позволяет материальному объекту проходить через ограждение; в данном случае необходимо учитывать минимальное расстояние, указанное изготовителем ЭЧЗО (см. МЭК/ТС 62046).
Функция подавления должна выполнять требования ИСО 13849-1. Уровень производительности функций подавления и гашения не должен неблагоприятно воздействовать на уровень производительности функции обеспечения безопасности, определенный для ЭЧЗО при общей оценке рисков. См. также 5.10.10.
5.10.8 Обеспечение безопасности для нескольких смежных роботизированных модулей
Должны быть приняты меры по обеспечению того, чтобы операторы одного роботизированного модуля не подвергались опасностям от смежных модулей.
Должны быть приняты меры для того, чтобы либо предотвратить доступ операторов в смежные модули из данного модуля, либо привести опасности смежных модулей в безопасное состояние до того, как операторы подвергнутся опасностям в смежных модулях или вызванных смежными модулями.
Если для данной цели используются стационарные ограждения, то их необходимая высота зависит от опасностей в обоих модулях (т.к. доступ может осуществляться из любого из модулей в другой), но она должна быть не менее 1400 мм.
Могут применяться и другие меры, а не только стационарные ограждения, например:
- электрочувствительное защитное оборудование;
- предохранительные коврики;
- одновременное выключение смежных модулей.
Выбор необходимых мер должен быть произведен в соответствии с 4.5.
Если защитные устройства должны быть подавлены для выполнения производственных операций, то уровень функциональной безопасности для подавления должен быть по крайней мере таким же, как уровень функциональной безопасности, определенный с помощью общей оценки рисков.
5.10.9 Обеспечение безопасности для систем смены инструмента
Рабочие органы и системы смены инструмента должны быть выбраны или разработаны так, чтобы потеря или восстановление подачи питания не вызывали опасности. Если это неосуществимо, то другие меры обеспечения безопасности должны быть применены для снижения любых опасностей.
Если используется система смены инструмента, то ее конструкция должна обеспечивать, чтобы неправильное использование не вызывало опасной ситуации. Отпускание или разъединение рабочего органа (органов) с использованием функции смены инструмента не должно происходить на позициях, в которых оно может вызвать опасность.
Система смены инструмента должна выдерживать предполагаемые статические и динамические нагрузки (например, в ситуации аварийной остановки, отключения питания).
5.10.10 Подавление
Под подавлением понимается временная автоматически управляемая приостановка выполнения функции обеспечения безопасности во время части цикла работы робототехнической системы.
Подавление должно использоваться только в случае необходимости выполнения на машине некоторого процесса. Оно должно быть реализовано так, чтобы человек не мог оставаться неопознанным в опасном пространстве, когда подавление заканчивается.
Подавление может использоваться в сочетании с любым устройством обеспечения безопасности, которое выдает электрический сигнал защитной остановки.
Подавление разрешено в том случае, если выполняется хотя бы одно из следующих условий:
a) безопасность поддерживается другими средствами (например, доступ в опасную зону заблокирован подаваемым материальным объектом);
b) персонал не подвергается опасности;
c) доступ к опасности невозможен без инициирования остановки.
Функция подавления должна инициироваться и завершаться автоматически. Это может быть обеспечено с помощью использования правильно выбранных и размещенных сенсоров или в ряде случаев с помощью сигналов от связанной с безопасностью системы управления (которая может включать связанное с безопасностью программное обеспечение задания оси и ограничения пространства робота в соответствии с ИСО 10218-1). Неправильные сигналы от сенсоров или сигналов, управляющих подавлением, нарушение их последовательности или синхронизации должны вызывать запрет на выполнение функции подавления (см. МЭК 61496-1).
Функция подавления должна обеспечивать эквивалентный уровень производительности связанной с безопасностью системы управления тому, который был определен с помощью общей оценки рисков для защитной функции, подлежащей подавлению. Уровень производительности функции подавления не должен неблагоприятно воздействовать на уровень производительности защитной функции. В случае сбоя последующее подавление должно быть запрещено до тех пор, пока данный сбой не будет исправлен.
В зависимости от общей оценки рисков может потребоваться индикатор, показывающий, когда функция подавления активна. Данный индикатор предупреждает, что нормальная защитная функция временно приостановлена.
Информация о подавлении, включая средства, расположение, зоны и функциональность, должна быть приведена в информации по использованию.
5.10.11 Временная приостановка обеспечения безопасности
Задачи, требующие временной приостановки обеспечения безопасности, например при обучении робота, должны иметь выделенный режим работы, который автоматически выбирает необходимые средства обеспечения безопасности для данной задачи в соответствии с результатами общей оценки рисков.
Выбор режима работы должен осуществляться с помощью безопасных средств (например, с помощью блокируемого устройства выбора, пароля, кода доступа) и должен соответствовать требованиям 5.2.2.
Должны быть выполнены следующие требования:
a) не должно существовать возможности возобновления автоматического режима работы, если система уже работает в автоматическом режиме;
b) автоматический режим работы может быть инициирован только извне защищенного пространства;
c) функция режима управления должна иметь уровень эффективности защиты, эквивалентный приостановленной защитной функции;
d) в случае сбоя приостанавливающей функции последующая приостановка должна быть запрещена до тех пор, пока данный сбой не будет исправлен;
e) визуальная индикация того, что действие устройств обеспечения безопасности приостановлено, должна быть обеспечена на устройстве выбора режима, на входе (входах) в модуль и на любых задействованных рабочих местах операторов;
f) альтернативные меры защиты должны быть активизированы для контроля над всеми опасностями; такие альтернативные меры защиты должны обеспечивать эквивалентный уровень защиты.
Если средства обеспечения безопасности должны быть временно приостановлены, то должны быть выполнены следующие условия:
- машины и оборудование, не требующееся для данной задачи, должны находиться в состоянии защитной остановки;
- машины и оборудование, необходимые для данной задачи, должны находиться под непосредственным управлением оператора.
Интегратор должен предоставить информацию по использованию для критических ситуаций, когда необходимо вручную приостановить средства обеспечения безопасности, например, при поиске неисправностей и замене устройства обеспечения безопасности.
5.11 Совместная работа робота с человеком
5.11.1 Общее описание назначения
Совместная работа - это особый вид действий человека и робота в общем рабочем пространстве. Совместная работа характеризуется следующими особенностями:
- она используется для выполнения заранее определенных задач;
- выполнение совместной работы возможно в том случае, когда все необходимые меры защиты находятся в активном состоянии;
- роботы, сконструированные специально для выполнения совместной работы, соответствуют требованиям ИСО 10218-1.
Примечание - Примеры применения совместной работы приведены в приложении Е.
Интегратор должен указать в информации по использованию средства обеспечения безопасности и выбор режима, необходимые для выполнения совместной работы.
5.11.2 Общие требования
Из-за возможного уменьшения пространственного разделения между человеком и роботом в совместном рабочем пространстве во время работы может произойти физический контакт между человеком и роботом. Для того чтобы обеспечить постоянную безопасность оператора, должны быть предприняты меры защиты.
Должны быть выполнены следующие требования.
а) Интегратор должен выполнить общую оценку рисков в соответствии с 4.3 (см. приложение Е с примерами применения). При общей оценке рисков должны быть рассмотрены совместная задача и рабочее пространство, включая как минимум следующее:
1) характеристики робота (например, нагрузку, скорость, усилие, мощность);
2) опасности, связанные с рабочим органом, включая объекты манипулирования (например, эргономическая конструкция, острые кромки, выступающие части, работа с устройством смены инструмента);
3) размещение робототехнической системы;
4) расположение оператора относительно близости к руке робота (например, не допускать работу под роботом);
5) расположение оператора и его перемещения относительно позиционируемых деталей, ориентации конструкций (например, фиксирующих приспособлений, строительных конструкций, стен) и расположение источников опасности на фиксирующих приспособлениях;
6) конструкция фиксирующих приспособлений, размещение и работа захватных устройств, другие сопутствующие опасности;
7) конструкция и расположение всех устройств ручного управления роботом (например, доступность, эргономика и т.д.);
8) опасности, связанные с конкретным применением (например, температура, отбрасываемые детали, сварочные брызги);
9) ограничения, вызванные использованием необходимого персонального защитного оборудования;
10) особые условия окружающей среды [например, химическое загрязнение, радиочастоты (РЧ), излучение и т.д.];
11) рабочие характеристики используемых функций безопасности.
b) Роботы, интегрированные в совместное рабочее пространство, должны соответствовать требованиям ИСО 10218-1.
c) Защитные устройства, используемые для определения присутствия человека, должны соответствовать требованиям 5.2.2.
d) Дополнительные меры защиты, используемые в совместном рабочем пространстве, должны соответствовать требованиям 5.2.
e) Средства обеспечения безопасности должны быть разработаны для препятствия проникновения человека в защищенное пространство за пределы совместного рабочего пространства или для обнаружения присутствия там человека. Проникновение в защищенное пространство за пределы совместного рабочего пространства должно вызывать остановку робота и прекращение воздействия всех опасностей.
f) Периметровое ограждение должно препятствовать или выявлять любого человека, входящего в защищенное пространство вне его части, предназначенной для совместной работы.
g) Если другие машины, соединенные с робототехнической системой или установленные на ней, представляют потенциальную опасность и находятся в совместном рабочем пространстве, то связанные с безопасностью функции этих машин должны соответствовать как минимум требованиям 5.2.
Желательно, чтобы роботы, сконфигурированные для выполнения совместной с человеком работы, были помечены специальным знаком, изображенным на рисунке 2.
|
Рисунок 2 - Предлагаемый вид знака
5.11.3 Требования к совместным рабочим пространствам
Совместное рабочее пространство, в котором оператор (операторы) может непосредственно взаимодействовать с роботом, должно быть четко обозначено (например, маркировка пола, специальные знаки и т.д.).
Люди/операторы должны быть защищены с помощью набора защитных устройств, соответствующих рабочим характеристикам робота, допустимым согласно ИСО 10218-1, которые могут предотвратить все опасности в соответствии с 5.2.2.
В том случае, если несколько человек (операторов) могут участвовать в выполнении совместной работы, каждый из них должен быть защищен с помощью средств, соответствующих 5.2.2.
Совместное рабочее пространство должно быть спроектировано так, чтобы оператор мог легко выполнить все задачи, а расположение оборудования и механизмов не должно создавать дополнительных опасностей. Там, где это возможно, желательно, чтобы связанное с безопасностью программное обеспечение задания оси и ограничения пространства робота использовалось для уменьшения диапазона возможных свободных движений робота.
Робототехническая система должны* быть установлена так, чтобы обеспечить минимальный зазор 500 мм (20 дюймов) между рабочим пространством робота (включая руку, любые установленные фиксирующие приспособления и рабочие детали) и зонами, занятыми элементами здания, конструкциями, инженерными сетями, другими машинами и оборудованием, который не препятствует доступу всего тела человека и может создать условия для захватывания или зажимания. Если такой минимальный зазор не может быть обеспечен, то должны быть приняты дополнительные меры защиты для того, чтобы остановить движение робота, если человек находится на расстоянии менее 500 мм от опасности быть захваченным или зажатым в статической внешней среде. Если имеет место динамическое движение (например, отслеживание движущегося конвейера), то могут потребоваться специальные возможности (см. ИСО 13854).
___________________
* Текст документа соответствует оригиналу. - .
Примечание - Указанные параметры могут быть разными для систем, спроектированных в соответствии с 5.11.5.4 и 5.11.5.5.
5.11.4 Переход от автономной работы к совместной работе и обратно
Момент изменения режима работы между автономной работой и совместной работой является особенно критичной частью совместной работы человека и робота. Изменение режима работы должно быть организовано так, чтобы робот не мог подвергнуть опасности персонал при переходе от автономной работы к совместной работе и обратно к автономной работе.
5.11.5 Работа в совместном рабочем пространстве
5.11.5.1 Общие положения
При проектировании совместной работы одна или более характеристик безопасности из 5.11.5.2-5.11.5.5 должны быть выбраны для обеспечения безопасной рабочей среды для всего персонала, подверженного возможным опасностям в рабочем пространстве. ИСО 10218-1 определяет требования и рабочие характеристики для роботов, используемых при совместной работе.
Любое выявленное нарушение выбранных характеристик безопасности при совместной работе должно вызывать защитную остановку в соответствии с 5.3.8.3. Автономная работа не должна возобновляться после такой остановки до тех пор, пока не будет осуществлен возврат в исходное состояние с помощью сознательного действия по перезапуску извне совместного рабочего пространства.
5.11.5.2 Контролируемая остановка с расчетной безопасностью
Если в совместном рабочем пространстве нет ни одного человека, то робот работает автономно. Если человек входит в совместное рабочее пространство, то робот должен прекратить движение и поддерживать состояние контролируемой остановки с расчетной безопасностью в соответствии с 10218-1 для того, чтобы разрешить непосредственное взаимодействие оператора с роботом (например, загрузить деталь в рабочий орган робота).
5.11.5.3 Проведение робота по траектории вручную
Выполнение проведения робота по траектории вручную должно быть разрешено только при выполнении следующих условий:
a) когда робот достигает заданной позиции, должна быть инициирована связанная с безопасностью контролируемая остановка в соответствии с ИСО 10218-1;
b) у оператора должно быть устройство управления, соответствующее требованиям ИСО 10218-1, для перемещения робота в заданное положение;
c) оператор должен иметь полную видимость всего совместного рабочего пространства;
d) если оператор отпускает устройство управления, то должна быть инициирована связанная с безопасностью контролируемая остановка в соответствии с ИСО 10218-1.
5.11.5.4 Контроль скорости и расстояния до человека
В робототехнических системах, спроектированных для поддержания безопасного расстояния между оператором и роботом в динамическом режиме, должны использоваться роботы, соответствующие требованиям ИСО 10218-1.
Скорость робота, минимальное расстояние до человека и другие параметры должны быть определены при общей оценке рисков.
Примечание - Дополнительная информация и руководство по выполнению совместных операций будут определены в ИСО/ТС 15066, который в настоящее время разрабатывается.
5.11.5.5 Ограничение мощности и усилия с помощью конструкции или управления
В робототехнических системах, спроектированных для управления опасностями с помощью ограничения мощности или усилия, должны использоваться роботы, соответствующие требованиям ИСО 10218-1.
Характеристики мощности, усилия и эргономики должны быть определены при общей оценке рисков.
Примечание - Дополнительная информация и руководство по выполнению совместных операций будут определены в ИСО/ТС 15066, который в настоящее время разрабатывается.
5.12 Ввод в эксплуатацию робототехнических систем
5.12.1 Общие положения
План ввода в эксплуатацию должен содержать информацию о мерах защиты для людей при вводе в эксплуатацию робототехнических систем. Эти меры могут также применяться к робототехническим системам после внесения в них существенных изменений или после проведения технического обслуживания, если данные мероприятия могут повлиять на их безопасную работу.
5.12.2 Выбор временных средств обеспечения безопасности
Временные средства обеспечения безопасности должны защищать персонал от тех же опасностей, которые были выявлены при общей оценке рисков. Если намеченные к установке средства обеспечения безопасности еще недоступны или не поступили до начала тестирования и верификации процедуры запуска, то должны быть установлены соответствующие временные средства.
Примечание - Во время начальной сборки роботизированного модуля может потребоваться защита до того, как будут установлены все средства обеспечения безопасности. Поэтому желательно, чтобы альтернативные средства обеспечения безопасности, такие как цепи или портативные перегородки, были установлены для обеспечения эффективной защиты персонала во время начального запуска оборудования. К факторам, влияющим на выбор альтернативных средств обеспечения безопасности, относятся: уровень подготовки задействованного персонала, длительность данной временной ситуации, доступность данного модуля для других лиц, тип используемого оборудования, которое работает в данное время, и опасности, которые представляет данное оборудование.
Как минимум должны быть установлены информационные ограждения для определения ограниченного пространства.
Все временные средства обеспечения безопасности должны быть определены в информации по вводу в эксплуатацию и включены в информацию по использованию.
К временным средствам обеспечения безопасности могут относиться:
a) те же средства, которые должны использоваться в готовой системе, но установленные временным способом;
b) разные устройства, используемые в дополнительных применениях;
c) временные заграждения;
d) особые процедуры, представленные в письменной форме;
e) средства информирования;
f) специальное обучение.
5.12.3 Планирование процедуры начального запуска
Процедура начального запуска должна быть установлена и должна включать, но не ограничиваться ими, следующие данные:
а) До включения питания необходимо проверить выполнение следующих работ надлежащим образом:
1) механический монтаж и устойчивость;
2) электрические соединения;
3) соединения инженерных сетей;
4) соединения линий связи;
5) периферийное оборудование и системы;
6) ограничивающие устройства, определяющие максимальное пространство.
b) Должны быть выпущены инструкции, что все люди должны покинуть защищенное пространство перед подачей питания на приводы.
c) После подачи питания необходимо проверить, что:
1) цепи и устройства аварийной остановки находятся в работоспособном состоянии;
2) каждая степень подвижности перемещается и ограничена надлежащим образом;
3) робот правильно реагирует на команды движения от базовой операционной системы;
4) средства информирования (звуковые и визуальные) функционируют надлежащим образом;
5) все устройства обеспечения безопасности, включая временные, функционируют надлежащим образом;
6) управление на сниженной скорости инициируется и функционирует надлежащим образом.
Примечание - Это особенно важно при первоначальном включении питания для того, чтобы убедиться, что робот и оборудование двигаются и работают надлежащим образом.
6 Верификация и валидация требований безопасности и мер защиты
6.1 Общие положения
Изготовитель или интегратор робототехнических систем должен предусмотреть верификацию и валидацию конструкции и компоновки робототехнических систем, включая необходимые защитные устройства, в соответствии с принципами, изложенными в разделах 4 и 5.
Общая оценка рисков должна быть проанализирована с целью проверки, все ли реально предсказуемые опасности были выявлены и корректирующие действия предприняты.
Примечание - Так как не все опасности, перечисленные в приложении А, применимы к любой робототехнической системе, то уровень риска, связанного с данной опасной ситуацией, не будет одинаковым для всех робототехнических систем, а в конкретных применениях робототехнических систем могут встретиться опасности, не указанные в приложении А. Общая оценка рисков должна быть проведена для того, чтобы определить, какие конкретные меры защиты должны быть предприняты для данной робототехнической системы.
6.2 Методы верификации и валидации
Верификация и валидация могут быть осуществлены с помощью следующих методов, но не ограничиваясь ими:
- А: визуальный осмотр;
- В: тестирование образца изделия;
- С: измерение;
- D: наблюдение во время работы;
- Е: анализ связанных с применением коммутационных схем, принципиальных схем и конструкторской документации;
- F: анализ связанного с безопасностью прикладного программного обеспечения и/или программной документации;
- G: анализ общей оценки рисков на основе функциональных задач;
- Н: анализ чертежей и документации по размещению оборудования;
- I: анализ спецификаций и информации по использованию.
См. таблицу G.1.
6.3 Необходимые верификация и валидация
В приложении G приведены требования к конкретным характеристикам, которые считаются существенными для безопасности робототехнической системы, которая подлежит верификации или валидации. Требования должны быть оценены с использованием подходящих методов с целью определить, адекватно ли они отражены в конструкции и компоновке робототехнической системы.
Примечания
1 Не все перечисленные в таблице G.1 требования могут быть применены к любой робототехнической системе. Могут существовать примеры, в которых будет невозможно провести верификацию и/или валидацию конкретных требований.
2 Таблица G.1 не является ни исчерпывающей, ни ограничивающей. Могут существовать дополнительные требования по верификации, зависящие от конструкции конкретной робототехнической системы.
3 Ответственностью интегратора является обеспечение того, чтобы для всех существенных элементов была проведена верификация или валидация.
4 При использовании таблицы G.1 в качестве контрольного перечня ее содержимое должно быть проанализировано и ограничено, чтобы соответствовать конфигурации конкретной оцениваемой робототехнической системы и подходящему методу для данной оценки.
6.4 Верификация и валидация защитного оборудования
Должна быть проведена верификация того, что защитное оборудование, установленное для снижения выявленных опасностей, используется в соответствии с инструкциями изготовителей и надлежащим образом применено в робототехнической системе (системах).
a) Предотвращение доступа к источнику опасности должно быть обеспечено с помощью:
1) снижения уровня опасности до приближения к ее источнику;
2) предупреждения возникновения опасности из-за непреднамеренных действий;
3) правильного содержания деталей и инструмента (например, отсутствие незакрепленных объектов, летающих предметов);
4) контроля других опасностей технологического процесса (например, шум, лазерное излучение, лучеиспускание).
b) Установленное защитное оборудование должно быть верифицировано в отношении:
1) типа ограждений, размера проходов, размещения ограждений, правильных безопасных расстояний и высоты;
2) невозможности приведения в действие управления возвратом в исходное состояние изнутри защищенного пространства;
3) типов защитных устройств, возможностей детектирования, размещения защитных устройств, правильных безопасных расстояний, размеров и т.д.;
4) функций обхода и подавления.
c) Должно быть верифицировано, что обеспечены следующие дополняющие меры защиты:
1) инструкции;
2) материалы для обучения;
3) предупреждения;
4) персональное защитное оборудование;
5) процедуры;
6) другие сопутствующие меры.
Примечание - Любая защитная мера может соответствовать не всем критериям перечислений а)-с), применение коих зависит от опасности, от которой защищает данная мера.
7 Информация по использованию
7.1 Общие положения
Информация по использованию должна содержать данные и инструкции, необходимые для безопасного и правильного использования системы, а также должна содержать информацию и предупреждения для пользователя о любых остаточных рисках. Информация по использованию от изготовителей машин, входящих в робототехническую систему, также должна быть включена.
Информация по использованию должна состоять из таких элементов, как документы, знаки, сигналы, обозначения или диаграммы, используемых для того, чтобы передать важную связанную с безопасностью информацию пользователю.
Стиль и содержание разных частей информации по использованию должны отражать уровень образования, технической осведомленности и компетенции потенциального читателя. Информация по использованию должна быть написана на языке, соответствующем потенциальному пользователю.
Информация по использованию должна отражать как использование по назначению, так и предсказуемые неправильные использования интегрированной системы.
Если требуется снизить опасность, то информация должна содержать:
- требования по подготовке персонала;
- требования к персональному защитному оборудованию;
- требования к дополнительным ограждениям или защитным устройствам (см. ИСО 12100).
Информация по использованию интегрированной робототехнической системы должна соответствовать требованиям ИСО 12100.
Примечания
1 Структурирование и представление информации по использованию определены в МЭК 62079.
2 См. также МЭК 60204-1.
7.2 Руководство пользователя
7.2.1 Общие положения
Руководство пользователя должно учитывать разные этапы использования робототехнической системы, включая транспортировку сборку и установку, ввод в эксплуатацию, эксплуатацию (включая включение, выключение, регулировку, обучение/программирование или переключение технологических процессов, работу, уборку, поиск неисправностей и техническое обслуживание) и в случае необходимости вывод из эксплуатации, демонтаж и утилизацию.
В руководстве пользователя должны быть описаны интерфейсы (физические, механические, функциональные) между робототехнической системой и вышерасположенными и нижерасположенными в иерархии технологическими процессами.
В частности, руководство пользователя должно содержать информацию, содержащуюся в 7.2.2-7.2.10.
7.2.2 Погрузо-разгрузочные работы
Информация, относящаяся к транспортировке, погрузо-разгрузочным работам и хранению, должна содержать, например, следующее:
a) условия хранения для отдельных машин;
b) габариты, значение (значения) массы, положение центра (центров) тяжести;
c) указания для погрузо-разгрузочных работ (например, рисунки, обозначающие точки приложения для подъемного оборудования).
7.2.3 Установка и ввод в эксплуатацию
Информация, касающаяся установки и ввода в эксплуатацию, должна включать, например, следующее:
a) требования по закреплению/анкеровке и компенсации вибраций;
b) условия для сборки и монтажа;
c) пространство, необходимое для эксплуатации и технического обслуживания;
d) допустимые условия окружающей среды (например, температура, влажность, вибрации, электромагнитные излучения);
e) инструкции по подключению робототехнической системы к источникам питания (в частности, защита от электрических перегрузок);
f) рекомендации по удалению отходов и уборке мусора;
g) в случае необходимости рекомендации по мерам защиты, которые должны быть предприняты пользователем [например, дополнительные или временные средства защиты (см. ИСО 12100), безопасные расстояния, знаки и сигналы, связанные с безопасностью];
h) инструкции, информирующие о том, как должны быть осуществлены первоначальное тестирование и проверка робототехнической системы и системы защиты перед первым применением и включением в процесс производства, включая функциональное тестирование при управлении на сниженной скорости.
7.2.4 Информация по тестированию ввода в эксплуатацию или процедура начального запуска
Данная информация должна включать, но не ограничиваться, следующее:
а) перед включением питания необходимо проверить, что:
1) робот правильно механически смонтирован и устойчиво установлен;
2) электрические соединения правильно подключены, а питание находится в заданных пределах (т.е. напряжение, частота, уровни помех);
3) обеспечено надлежащее электрическое заземление (выравнивающий потенциал);
4) связанные с безопасностью элементы системы управления правильно установлены;
5) другие инженерные сети (например, вода, воздух, газ) правильно подключены и находятся в заданных пределах;
6) периферическое оборудование, включая блокирующие устройства, правильно подключено;
7) ограничивающие устройства, которые определяют ограниченное пространство (если они применяются), установлены;
8) применены надлежащие средства обеспечения безопасности;
9) условия окружающей среды соответствуют требованиям (например, уровни освещения и шума, температура, влажность, загрязнение атмосферы);
10) необходимые версии программного обеспечения (для обычного управления и связанного с безопасностью) установлены и проверены (выполняются процедуры управления изменениями);
b) после включения питания необходимо проверить, что:
1) устройства управления запуском, остановкой и выбором режима (включая ключи блокировки клавиш) функционируют в соответствии с их назначением;
2) каждая степень подвижности двигается и ограничена надлежащим образом;
3) цепи и устройства аварийной и защитной (если используется) остановок работоспособны;
4) имеется возможность отсоединения и изоляции внешних источников питания;
5) средства для обучения и воспроизведения программ функционируют правильно;
6) условия окружающей среды проверены на соответствие требованиям [например, взрывоопасность, коррозионная агрессивность, влажность, пыль, температура, электромагнитные помехи (ЭМП), радиочастотные помехи (РЧП) и электростатический разряд (ЭСР)];
7) средства обеспечения безопасности, защитные устройства, деблокирующие устройства и блокирующие устройства функционируют надлежащим образом;
8) все другие средства обеспечения безопасности находятся на своих местах (например, барьеры, предупреждающие устройства);
9) в ручном режиме робот функционирует надлежащим образом и может осуществлять операции с изделием или деталью;
10) в автоматическом (обычном) режиме работы робот функционирует надлежащим образом и может выполнять намеченные задачи на номинальной скорости и с номинальной нагрузкой.
Процедуры тестирования ввода в эксплуатацию и начального запуска также должны быть выполнены после завершения любых работ по техническому обслуживанию или модификации системы, которые могут повлиять на работоспособность робототехнической системы (систем) в соответствии с ее конструкцией и установкой.
7.2.5 Информация о системе
Информация, относящаяся к самой робототехнической системе, должна включать, например, следующее:
a) подробное описание системы, ее приспособлений, ограждений и/или других защитных устройств;
b) полный перечень применений, для которых предназначена робототехническая система, включая запрещенные применения (если таковые имеются), с учетом возможных модификаций исходной робототехнической системы (при их наличии);
c) спецификацию требований по безопасности, в которой представлены функции обеспечения безопасности, выполняемые системой управления, и их полнота обеспечения безопасности, дискретные цепи остановки, контроллеры обеспечения безопасности и безопасный обмен информацией;
d) другие функции управления, панели управления, пульты обучения, деблокирующие устройства и индикаторы информированности;
e) схемы (размещение, управление, электрические, гидравлические, пневматические и т.д.);
f) данные о других опасностях, например, наличие излучения, газов, паров, пыли и вибраций, с указанием используемых методов измерения;
g) техническую документацию на электрическое оборудование (см. комплекс МЭК 60204);
h) спецификации требований к эквипотенциальному соединению (заземлению). Электрическое заземление (выравнивающий потенциал) должно быть выполнено в соответствии с МЭК 60204-1;
i) документы, подтверждающие то, что данная робототехническая система соответствует обязательным требованиям;
j) изменения, внесенные в меры защиты, которые первоначально были поставлены вместе с машинами, входящими в систему;
k) анализ нагрузок рабочего органа (инструмента на конце руки), поведение в случае отключения питания, вопросы вмешательства человека, техническое обслуживание и назначенный срок службы;
l) требования к интерфейсам с другими машинами;
m) расположение динамически ограничивающих зон;
n) назначенный срок службы системы.
7.2.6 Использование системы
Информация по использованию интегрированной робототехнической системы должна включать, например, следующее:
a) остаточные риски, т.е. те риски, которые не могут быть устранены с помощью мер защиты, предпринятых разработчиком;
b) конкретные риски, которые могут возникнуть в некоторых применениях, при использовании определенных приспособлений, и особые средства обеспечения безопасности, необходимые для данных применений;
c) реально предсказуемое неправильное использование и запрещенные применения;
d) материальные потоки;
e) использование по назначению;
f) зоны выполнения задач и связанные с ними остаточные риски (см. ИСО 11161);
g) задачи, выполняемые оператором, места расположения и пути перемещения оператора при выполнении задач;
h) диапазон управления разных управляющих и защитных устройств (см. ИСО 11161) (например, защитных устройств, возврата в исходное состояние защитных устройств, деблокирующих устройств, аварийных остановок, пультов управления, средств разъединения);
i) описание органов ручного управления (актуаторов), деблокирующих устройств, защитных остановок;
j) настройку и регулировку;
k) режимы и средства для обеспечения остановки (особенно аварийной остановки);
I) идентификацию и локализацию неисправностей, ремонт и перезапуск после вмешательства;
m) персональное защитное оборудование, которое должно быть использовано, и необходимое обучение;
n) инструкции по тестированию и проверке, необходимым после замены элементов или подключения дополнительных средств (как аппаратных средств, так и программного обеспечения), которые могут повлиять на функции обеспечения безопасности;
о) инструкции, устанавливающие, что к отсоединенным выносным пультам не должно быть возможности доступа;
р) инструкции по восстановлению после сбоев и аварийному восстановлению оборудования системы;
q) требования к обучению работе в режиме дистанционного управления;
r) размещение или устройство хранилища неиспользуемых бескабельных выносных пультов для предотвращения их использования для выдачи команды аварийной остановки;
s) требования по периодическому функциональному тестированию связанного с безопасностью оборудования;
t) руководство по правильному выбору, подготовке, применению и техническому обслуживанию расходных материалов для обеспечения технологического процесса.
7.2.7 Техническое обслуживание
Информация по техническому обслуживанию должна включать, например, следующее:
a) сущность и частоту проверок функций обеспечения безопасности;
b) инструкции, относящиеся к операциям по техническому обслуживанию, которые требуют определенных технических знаний или конкретных навыков и, следовательно, должны выполняться исключительно подготовленными лицами (например, персоналом по техническому обслуживанию, специалистами);
c) инструкции, относящиеся к операциям по техническому обслуживанию (например, для замены плавких предохранителей), которые не требуют специальных навыков и, следовательно, могут выполняться пользователями (например, операторами);
d) чертежи и схемы, помогающие обслуживающему персоналу рационально выполнять свои задачи (особенно задачи по поиску неисправностей);
е) информацию по замене связанных с безопасностью деталей (например, номер детали у изготовителя, спецификация деталей);
f) контактную информацию изготовителя (изготовителей), необходимую для замены деталей;
g) задачи, требующие контроля и изоляции энергии;
h) примеры безопасной работы при временной ручной приостановке функционирования средств обеспечения безопасности.
7.2.8 Вывод из эксплуатации
Информация, относящаяся к выводу из эксплуатации, демонтажу и удалению робототехнической системы, должна быть включена в информацию по использованию.
7.2.9 Аварийные ситуации
Информация по аварийным ситуациям должна включать, например, следующее:
a) тип противопожарного оборудования, которое должно быть использовано;
b) предупреждение о возможном испускании или вытекании вредных веществ;
c) средства по борьбе с последствиями аварийных ситуаций (если это осуществимо).
7.2.10 Специфические особенности робота
Специфическая для робота информация должна включать, например, следующее:
a) информацию в соответствии с ИСО 9946;
b) информацию в соответствии с ИСО 10218-1;
c) в соответствующих случаях информацию о ручном управлении на высокой скорости с помощью выносного пульта;
d) инструкцию по установке ограничивающих устройств, включая число, расположение и степень регулировки жестких упоров, включая инструкции по числу, расположению и реализации немеханических ограничивающих устройств, а также возможностей динамического ограничения при их наличии;
e) информацию о числе и работе деблокирующих устройств и инструкции по установке дополнительных устройств;
f) информацию о времени и расстоянии или угле остановки трех степеней подвижности с максимальными значениями перемещений;
g) спецификацию любых жидкостей или смазывающих материалов, которые должны использоваться для внутренних систем смазки, торможения или трансмиссии робота;
h) информацию, определяющую пределы диапазона движения и грузоподъемности, включая максимальную массу, положение центра тяжести рабочих деталей и фиксирующих приспособлений;
i) информацию о стандартах, которым соответствует робот или робототехническая система, включая любые стандарты, выпущенные третьей стороной;
j) в соответствующих случаях инструкции по синхронизации движения роботов и специальной подготовке, необходимой для программистов/операторов;
k) инструкции для случаев аварийного или ненормального перемещения робота без включения питания приводов;
I) программные ограничения, установленные с помощью использования программного ограничения с расчетной безопасностью степеней подвижности и рабочего пространства робота;
m) для робототехнических систем, разработанных для выполнения совместной работы, информацию о том, что данный робот подходит для его интеграции с целью выполнения совместной с человеком работы, со ссылкой на 5.11, где определены требования, которым робот должен соответствовать, и тип совместных операций.
7.3 Маркировка
Робототехническая система должна иметь видимую, четкую и несмываемую маркировку, содержащую следующую минимальную информацию:
- фирменное наименование и полный адрес изготовителя и в соответствующих случаях авторизованного представителя;
- обозначение машинного оборудования;
- обозначение серии или типа;
- серийный номер, если он имеется;
- год создания, т.е. год, в котором завершено формирование производственного процесса;
- если машинное оборудование спроектировано и построено для использования в потенциально взрывоопасной атмосфере, то это должно быть отмечено соответствующим образом.
Приложение А
(справочное)
Список существенных опасностей
В таблице А.1 приведен список существенных опасностей для робота и робототехнических систем.
Примечание - Список опасностей, приведенный в таблице А.1, взят из ИСО 12100.
Таблица А.1 - Список существенных опасностей
N | Тип или группа | Примеры опасностей | Раздел стандарта | |
Причина | Потенциальное последствие | |||
1 | Механические опасности | - перемещения любой части руки робота (включая движения в обратном направлении), рабочего органа или любой подвижной части роботизированного модуля; | - раздавливание; | 4.1; 4.2; 4.2 d) 6); |
- неисправность рабочего органа (отделение); | ||||
- невозможность покинуть роботизированный модуль (через дверцу) зажатому оператору в автоматическом режиме; | ||||
- непреднамеренное движение или приведение в действие рабочего органа или связанного оборудования (включая внешние степени подвижности, управляемые роботом процессы, характерные для шлифовальных кругов, и т.д.); | ||||
2 | Электрические опасности | - контакт с токоведущими частями и соединениями (электрический шкаф, распределительные коробки, панели управления на машине); | - поражение электрическим током; | 4.4.1; 5.3.2; 5.3.6; 5.3.7; 5.8.2; 5.10.6.1; 5.10.6.2; 5.10.7 |
3 | Термические опасности | - горячие поверхности, связанные с рабочим органом, оборудованием или обрабатываемой деталью (например, сварочные горелки, горячие объекты в ковочных прессах, литьевое формование, шлифование и удаление облоя; | - ожоги (от горячего или холодного); | 5.3; 5.5.2; 5.5.4 |
4 | Опасности от шума | - специфические применения, являющиеся источниками высокого уровня шума (например, водоструйная резка, штамповочные прессы, насосы и клапанные системы, обработка металла резанием); | - потеря слуха; | Шум исключен из области применения настоящего стандарта |
5 | Опасности от вибрации | - прямой контакт с источником; | - утомление; | 4.2, 4.3, 4.4, 4.5, 5.5.2, 5.5.9 |
6 | Опасности от излучения | - электромагнитные помехи, влияющие на нормальную работу робота; | - ожоги; | 4.2, 4.3, 4.4, 4.5, 5.5.2, 5.5.9 |
7 | Опасности от материалов/ | - контакт с компонентами, покрытыми вредными жидкостями; | - отравление; | 4.2, 4.3, 4.4, 4.5, 5.5.2, 5.5.3 |
8 | Эргономи- | - плохо спроектированный пульт обучения, сенсорный экран человеко-машинного интерфейса или пульт оператора (расположен слишком далеко или высоко); | - вредные для здоровья позы или чрезмерные усилия (хронические растяжения сухожилий); | 4.2 d); 4.3; 4.4; 4.5; 5.3.2; 5.3.13; 5.5; 5.5.2; 5.5.3; 5.9 |
9 | Опасности, связанные с внешней средой, в которой используется машина | - размещение в местах, подверженных землетрясениям; | - ожоги; | 4.1; 4.2; 5.2; 5.3; 5.5 |
10 | Комбинации опасностей | - робототехническую систему запускает один человек, но это оказывается неожиданным для другого человека; | - любые другие последствия комбинаций опасностей и опасных ситуаций | 4.2; 4.3; 4.4; 4.5; 5.2; 5.3.10; 5.6.3.3; 5.8; 5.9; 5.9.1 |
- выполняемое действие повышает серьезность вреда, например, при обходе острого края происходит контакт с горячей поверхностью; | ||||
Приложение В
(справочное)
Взаимосвязь стандартов, относящихся к защитным устройствам
|

Приложение С
(справочное)
Обеспечение безопасности мест подачи и выдачи материальных объектов
С.1 Общие соображения по предотвращению доступа к конвейерам
Системы подачи материальных объектов могут быть неотъемлемой частью промышленной робототехнической системы, доставляя материальные объекты в и из защищенного пространства. К таким системам относятся конвейеры всех типов (например, ленточные конвейеры, приводные и бесприводные роликовые конвейеры, пластинчатые конвейеры и т.д.), поэтому из-за их разнообразия невозможно описать все требования по обеспечению безопасности. Общая оценка рисков всегда должна проводиться для того, чтобы обеспечить, что все опасности идентифицированы, оценены и надлежащим образом контролируются. При этом должны быть рассмотрены следующие возможности.
a) Средства для обеспечения безопасного доступа (например, блокированные дверцы) должны быть сделаны как можно более удобными в местах доступа для предотвращения того, чтобы персонал искал возможность доступа к системе подачи материальных объектов.
b) Системы подачи материальных объектов не должны иметь каких-либо открытых пространств, предоставляющих доступ к любым опасностям.
c) Риск доступа вдоль всего конвейера (например, недопущение применения наклонных поверхностей).
d) Риск перешагивания или доступа всего тела (например, предотвращение с помощью ограды по бокам конвейера, достаточной высоты конвейера, ЭЧЗО).
e) Риск захватывания и попадания на конвейер.
|
Рисунок С.1 - Примеры мер по предотвращению доступа к конвейерам
С.2 Пример небольших окон доступа
Размеры окна доступа должны соответствовать размерам перемещаемых материальных объектов.
Никакие опасные пространства не должны быть доступны через окно доступа.
|

Рисунок С.2 - Подача материальных объектов через небольшое окно доступа в ограждении
С.3 Пример тоннелей
Тоннели достаточной глубины предотвращают доступ в опасные пространства.
|
Рисунок С.3 - Тоннель, используемый для увеличения расстояния до опасности
С.4 Пример обеспечения безопасности с помощью ЭЧЗО
Электрочувствительное защитное оборудование определяет присутствие тела человека, однако проход изделия разрешен благодаря взаимному подавлению сигналов (показано на рисунке с помощью пересекающихся лучей).
|
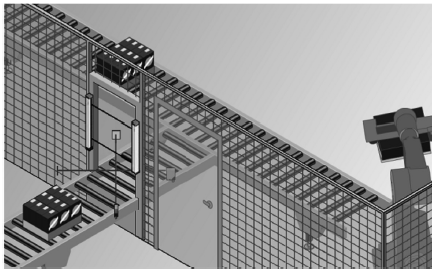
Рисунок С.4 - Обеспечение безопасности с помощью ЭЧЗО
Приложение D
(справочное)
Работа нескольких деблокирующих устройств
Таблица D.1 - Таблица состояний для работы машины в зависимости от позиций двух деблокирующих устройств
Устройство А | ||||
Позиция 1 | Позиция 2 | Позиция 3 | ||
Устройство В | Позиция 1 | ВЫКЛ. | ВЫКЛ. | ВЫКЛ. |
Позиция 2 | ВЫКЛ. | РАЗРЕШЕНО | ВЫКЛ. | |
Позиция 3 | ВЫКЛ. | ВЫКЛ. | ВЫКЛ. | |
Работа машины должна быть разрешена только в том случае, когда оба деблокирующих устройства находятся в позиции 2, т.е. в центральной позиции.
Приложение Е
(справочное)
Возможные применения роботов, работающих совместно с человеком
Примечание - Требования определены в 5.11.
Вид применения | Описание | Устройства обеспечения безопасности | Назначение | |
| Передаточное окно | - автономная автоматическая работа в пределах защищенного пространства; | - стационарные или чувствительные ограждения вокруг рабочего пространства; | - загрузка и разгрузка; |
| Интерфейсное окно | - автономная автоматическая работа в пределах защищенного пространства; | - стационарные или чувствительные ограждения вокруг рабочего пространства; | - автоматическое штабелирование и разборка штабеля; |
| Совместное рабочее пространство | - автономная автоматическая работа в пределах общего (совместного) рабочего пространства; | - система определения присутствия человека, использующая один или несколько сенсоров; | - совместная сборка; |
| Осмотр/ | - автономная автоматическая работа в пределах защищенного пространства; | - стационарные или чувствительные ограждения вокруг рабочего пространства; | - осмотр и настройка технологических процессов, например, при сварочных работах |
| Управляемый вручную робот | - специфичное для применения рабочее пространство; | - сниженная скорость; | - сборка, окраска и т.д. в ручном режиме |

Приложение F
(справочное)
Наблюдение за технологическим процессом
F.1 Общие положения
Под наблюдением за технологическим процессом понимается комбинация технических мер по обеспечению безопасности и требований к безопасному поведению, которые обеспечивают максимальную практическую защиту оператора с помощью ограничения скоростей и пересекающихся траекторий и отключения ненужных движений.
Временное наблюдение за автоматическими технологическими процессами должно осуществляться при уменьшении мер защиты в случае возникшей необходимости и применении альтернативных мер защиты. Технические меры обеспечения безопасности должны осуществляться таким образом, чтобы не допустить реально предсказуемого неправильного использования.
Данный вид деятельности должен стать предметом интенсивных контактов между интегратором и будущим пользователем для того, чтобы иметь возможность проанализировать требования к поведению оператора и преобразовать их в необходимые действия.
В случае остаточного риска, например при выбросе расплавленных металлических частиц, должен быть применен алгоритм, представленный на рисунке F.1.
Дополнительная информация по наблюдению за технологическим процессом приведена в ИСО 11161.
Примечание - Данное приложение заимствовано из ИСО 11161:2007, приложение D.
F.2 Комментарии к наблюдению за технологическим процессом
См. рисунок F.1.
a) Существует ли необходимость более "тщательного" наблюдения за рабочим процессом? Может ли рабочий процесс контролироваться с помощью подходящих режимов работы, установленных в стандартах типа С? Могли бы быть полезны дополнительные системы, такие как видеокамеры или устройства структурного шума?
Проводились ли дополнительные консультации с будущим пользователем? Достаточно ли было разъяснено пользователю, что дополнительный режим работы абсолютно необходим для намеченного производства (например, из-за существенно изменяющихся допусков, корректировок изготовления, проверки качества)?
b) Зафиксированы ли результаты консультаций и, в частности, причины, по которым необходим дополнительный режим работы? Остается ли применение данного дополнительного режима работы ограниченным до необходимого предела в рамках предполагаемого использования по сравнению с работой в обычном режиме?
c) Предполагаемое использование робототехнической системы с применением дополнительного режима работы должно быть точно определено и включено в техническую документацию. Для проведения анализа опасностей и общей оценки рисков, стратегия обеспечения безопасности (см. раздел 4) должна включать предполагаемое использование. Должны быть учтены конкретные условия (расположение человека вблизи технологического процесса).
d) Устранение опасностей с помощью конструктивных мер имеет при снижении рисков наивысший приоритет. Вследствие того, что это трудно поддается управлению, должны быть, в частности, рассмотрены технические меры по обеспечению безопасности для снижения рисков. Технические меры должны способствовать, с одной стороны, снижению рисков и, с другой стороны, ограничивать дополнительный режим работы в максимальной степени до необходимого минимума для того, чтобы предотвратить неправильное использование, например, с помощью:
1) безопасного ограничения скорости и пересекающихся траекторий до только необходимого уровня;
2) ручного перезапуска движущихся элементов после нахождения в состоянии покоя;
3) безопасного отключения тех опасных перемещений/осей, которые не требуются для данного режима работы;
4) запретов на автоматическую смену инструмента;
5) запретов на смены палет;
6) запрета на нахождение охлаждающего агента под высоким давлением;
7) ручного подтверждения выпуска охлаждающего агента;
8) легкой доступности устройств для остановки робота в аварийной ситуации (аварийной остановки);
9) исключительно авторизованного доступа, например, с помощью клавишного переключателя или пароля.
e) Если достаточное снижение рисков достигнуто с помощью технических средств, то может быть предусмотрен дополнительный режим работы.
f) Данный итерационный процесс может продолжаться до тех пор, пока не будут исчерпаны все технические меры.
g) Если общая оценка рисков показывает, что остающийся риск является неприемлемым, то интегратор должен проверить, может ли пользователь внести необходимый вклад в снижение риска с помощью дополнительных средств, таких как:
1) необходимая квалификация работников;
2) обеспечение регулярного инструктажа (с письменным подтверждением);
3) персональное защитное оборудование (например, защитные очки, защитная обувь, подходящая одежда);
4) добавление инструкций по эксплуатации, касающихся дополнительного режима работы.
h) Если интегратор получает информацию, что пользователь не может внести описанный выше вклад, то никакой дополнительный режим работы не должен быть предусмотрен для данной робототехнической системы.
i) Если интегратор получает информацию, что пользователь может внести необходимый вклад с помощью дополнительных мер, то такие меры должны быть зафиксированы в соглашении между интегратором и пользователем, а также должны быть включены как требование в руководство по эксплуатации и в виде маркировок или предупреждающих знаков нанесены на робототехническую систему.
j) Вся информация, касающаяся дополнительного режима работы, должна быть зафиксирована в руководстве по эксплуатации:
1) использование по назначению;
2) предупреждения о возможном неправильном использовании;
3) описание работы и функций;
4) меры, которые должны быть предприняты пользователем в соответствии с перечислениями е) и f);
5) другие требования, касающиеся технического обслуживания и контроля.
|
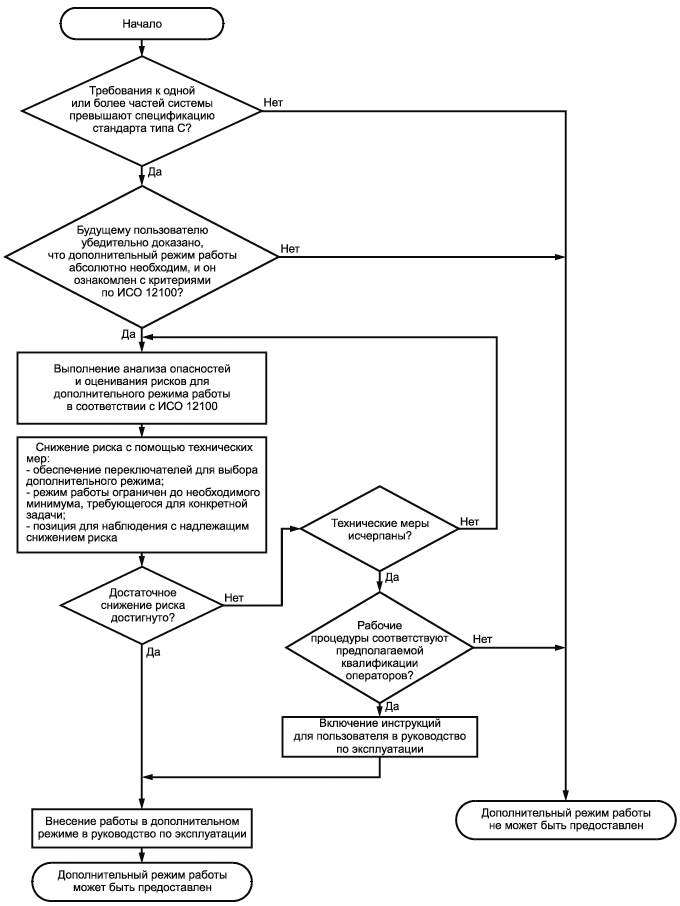
Рисунок F.1 - Обеспечение безопасности при наблюдении за технологическим процессом
Приложение G
(обязательное)
Средства верификации требований и мер по обеспечению безопасности
В таблице G.1 представлены требования к конкретным характеристикам, которые определены как существенные для безопасности робота, для которых должны быть проведены верификация или подтверждение соответствия либо обе эти процедуры.
Замечания по использованию данной таблицы приведены в 6.3.
Таблица G.1 - Средства верификации требований и мер по обеспечению безопасности
Раздел | Применяемые требования и/или меры по обеспечению безопасности | Метод верификации и/или валидации (см. 6.2) | ||||||||
A | B | C | D | E | F | G | H | I | ||
5.2 | Характеристики связанной с безопасностью системы управления (аппаратные средства и программное обеспечение) | |||||||||
5.2.1 | Рабочие характеристики, а также данные и критерии, необходимые для определения характеристик, приведены в информации по использованию | X | X | |||||||
5.2.2 | Характеристика УЭЗ=d, категория конструкции 3 | X | X | X | ||||||
5.2.2 | Характеристика УПБ 2, уровень отказоустойчивости аппаратного обеспечения 1 с интервалом контрольных испытаний не менее 20 лет | X | X | X | ||||||
5.2.3 | Результаты общей оценки рисков использованы для определения характеристик | X | X | |||||||
5.3 | Конструкция и установка | |||||||||
5.3.1 | Система разработана и выбрана, исходя из условий эксплуатации | X | X | X | ||||||
5.3.2 | Выбор автоматического режима должен осуществляться извне защищенного пространства | X | X | X | ||||||
5.3.3 | Органы управления приводами соответствуют требованиям МЭК 60204-1 | X | ||||||||
5.3.3 | Робототехническая система не должна реагировать на любые внешние дистанционные команды управления, вызывающие опасные ситуации | X | X | |||||||
5.3.4 | Все источники энергии должны соответствовать требованиям изготовителя | X | X | X | X | |||||
5.3.4 | Электрические двери в ограждениях должны быть установлены так, чтобы они открывались полностью, а пути прохода всегда были доступны | X | X | X | X | |||||
5.3.5 | Защитные соединения должны соответствовать МЭК 60204-1 | X | X | |||||||
5.3.6 | Обеспечены средства изоляции опасной энергии | X | X | X | ||||||
5.3.6 | Средства изоляции опасной энергии должны быть четко обозначены | X | ||||||||
5.3.7 | Средства управляемого выпуска опасной энергии должны быть обеспечены | X | X | X | ||||||
5.3.7 | Средства управляемого выпуска опасной энергии должны быть четко обозначены | X | ||||||||
5.3.8.1 | Робототехническая система имеет защитную остановку | X | X | |||||||
5.3.8.1 | Робототехническая система имеет независимую аварийную остановку | X | X | |||||||
5.3.8.1 | Защитная и аварийная остановки должны иметь средства для подключения внешних защитных устройств | X | X | |||||||
5.3.8.2 | Каждая станция управления, способная инициировать движение робота или другие опасные функции, должна иметь аварийную остановку | X | X | X | ||||||
5.3.8.2 | Включение аварийной остановки останавливает все движения робота и другие опасные функции в роботизированном модуле | X | X | |||||||
5.3.8.2 | Имеет единую аварийную остановку для системы или диапазона управления для многих функций | X | X | |||||||
5.3.8.2 | Все устройства аварийной остановки в одном рабочем пространстве имеют одинаковый диапазон управления | X | X | |||||||
5.3.8.2 | Сведения о диапазоне управления приведены в информации по использованию | X | X | |||||||
5.3.8.2 | Функция аварийной остановки должна соответствовать 5.3.8.2 | X | X | X | ||||||
5.3.8.2 | Функция аварийной остановки должна вызывать остановку категории 0 или 1 | X | X | X | ||||||
5.3.8.2 | Функция аварийной остановки должна соответствовать УЭЗ=d, категории 3, если только при общей оценке рисков не были определены другие рабочие характеристики | X | ||||||||
5.3.8.2 | Выходной сигнал аварийной остановки должен продолжать выдаваться при отключении питания системы, в противном случае при отключении питания должен генерироваться сигнал аварийной остановки | X | X | X | ||||||
5.3.11 | Процедуры аварийного восстановления представлены в информации по использованию | X | ||||||||
5.3.11 | Знаки или метки процедур аварийного восстановления нанесены на робототехнической системе или предоставлена информация по их нанесению | X | X | |||||||
5.3.12 | Плохо видимые предупреждающие знаки заменены средствами предупреждения аналогичной эффективности | X | X | |||||||
5.3.13 | Уровень освещения рабочего пространства определен и указан в информации по использованию | X | X | X | X | |||||
5.3.13 | Обеспечено внутреннее освещение, подходящее для работы | X | X | X | X | X | ||||
5.3.14 | При интеграции робототехнической системы учтены опасности конкретного применения | X | X | X | X | |||||
5.3.14 | Требования к интерфейсам с другими машинами соответствуют руководству изготовителя, приведенному в информации по использованию | X | X | X | X | |||||
5.3.15 | Дополнительные деблокирующие устройства и их интеграция соответствуют ИСО 10218-1 | X | X | X | X | |||||
5.3.15 | Обеспечено достаточное число дополнительных деблокирующих устройств для предполагаемого персонала, находящегося в защищенном пространстве | X | X | X | X | X | X | |||
5.3.15 | Все деблокирующие устройства, связанные с управлением одним роботом, имеют одинаковую функциональность | X | X | X | X | |||||
5.3.15 | Деблокирующие устройства сблокированы в зонах роботизированного модуля, в которых персонал подвергается опасности от другого робота или другого оборудования | X | X | X | X | X | X | X | ||
5.3.15 | Дополнительное сблокированное оборудование требует отдельного перезапуска | X | X | X | X | |||||
5.4 | Ограничение движения робота | |||||||||
5.4.2 | Защищенное пространство организовано с помощью периметрового ограждения при правильном учете расположения и размещения оборудования и свойственных ему опасностей | X | X | X | X | X | X | |||
5.4.2 | Ограниченное пространство организовано с помощью средств, ограничивающих движение робота, рабочего органа, фиксирующих приспособлений и рабочего объекта | X | X | X | X | |||||
5.4.2 | Ограниченное пространство расположено внутри защищенного пространства | X | X | X | X | |||||
5.4.2 | Периметровые средства обеспечения безопасности не установлены к источнику опасности ближе границ ограниченного пространства либо периметровое средство обеспечения безопасности разработано так, что оно является ограничивающим устройством в соответствии с 5.4.3 | X | X | X | X | X | ||||
5.4.3 | Механические ограничивающие средства робота соответствуют ИСО 10218-1 | X | X | X | X | X | ||||
5.4.3 | Немеханические ограничивающие средства робота соответствуют ИСО 10218-1 | X | X | X | X | |||||
5.4.3 | Системы управления немеханических ограничивающих средств робота соответствуют ИСО 10218-1, если только при общей оценке рисков были определены другие характеристики | X | X | X | X | X | ||||
5.4.3 | Расстояние до полной остановки, связанное с ограничивающими средствами, учтено при расчете размеров ограниченного пространства | X | X | X | X | |||||
5.4.3 | Ограничивающие устройства правильно отрегулированы и защищены | X | X | X | X | X | ||||
5.4.3 | При использовании немеханических ограничивающих устройств, включая программное ограничение степеней подвижности и рабочего пространства робота с расчетной безопасностью (ИСО 10218-1), ограниченное пространство было определено с учетом реальной нагрузки робота | X | X | X | X | X | ||||
5.4.3 | Если скорость робота ограничена с помощью мониторинговой системы, соответствующей 5.2.2, то ограниченное пространство может быть основано на реальной скорости. В противном случае ограниченное пространство основано на максимальной скорости робота | X | X | X | X | X | ||||
5.4.3 | Информация о программируемых ограничениях с расчетной безопасностью и ограничениях пространства приведена в информации по использованию | X | X | |||||||
5.4.3 | В случаях, когда периметровое ограждение является одновременно ограничивающим устройством, результаты общей оценки рисков были использованы для определения требований к конструкции, прочности и деформируемости данного ограждения | X | X | X | ||||||
5.4.4 | Динамические механические ограничивающие устройства способны остановить робот, движущийся с номинальной нагрузкой и скоростью | X | X | X | X | X | ||||
5.4.4 | Системы управления безопасностью, связанные с динамическим ограничением, соответствуют требованиям 5.2 | X | X | X | ||||||
5.4.4 | Расположение пространств с динамическим ограничением определено в информации по использованию | X | X | X | ||||||
5.5 | Размещение | |||||||||
5.5.1 | При выборе защитных устройств учтены предполагаемые рабочие нагрузки, влияние обрабатываемого материала и другие внешние факторы | X | X | X | X | X | ||||
5.5.1 | Периметровое ограждение реализовано в соответствии с 5.10 | X | X | X | X | X | X | X | ||
5.5.1 | Безопасные расстояния снаружи и внутри механического ограждения соответствуют ИСО 13857 | X | X | X | ||||||
5.5.1 | Минимальные расстояния безопасности от блокирующих ограждений соответствуют ИСО 13855 | X | X | X | ||||||
5.5.1 | Минимальные зазоры, предотвращающие смятие, соответствуют ИСО 13854 | X | X | X | ||||||
5.5.2 | Минимальный зазор в 500 мм поддерживается в рабочих зонах, в которых требуется ручное управление на высокой скорости | X | X | X | X | X | ||||
5.5.2 | Где это возможно, схема размещения оборудования позволяет оператору выполнять задачи извне защищенного пространства | X | X | X | ||||||
5.5.2 | Обеспечен необходимый и безопасный доступ к местам выполнения задач в пределах безопасного защищенного пространства | X | X | X | X | X | ||||
5.5.2 | Пути и средства доступа не содержат источники опасности | X | X | X | X | |||||
5.5.2 | Постоянные средства доступа обеспечены для часто выполняемых задач | X | X | X | X | X | ||||
5.5.2 | Обеспечены средства доступа к электрическому оборудованию, расположенному выше достижимой высоты | X | X | X | ||||||
5.5.2 | Обеспечены средства доступа к устройствам, расположенным на высоте от 400 до 2000 мм от уровня доступа | X | X | X | X | |||||
5.5.2 | Выбор и конструкция помостов, мостков, ступеней, стремянок и закрепленных лестниц соответствуют ИСО 14122 | X | X | X | X | |||||
5.5.2 | Безопасность обеспечена на границах между смежными роботизированными модулями | X | X | X | X | X | X | |||
5.5.2 | Обеспечена безопасность на соседних роботизированных модулях при передаче материальных объектов | X | X | X | X | X | X | |||
5.5.4 | Режимы работы соответствуют 5.6.4.2, 5.6.4.3 или обеспечен отдельный режим управления для наблюдения за технологическим процессом изнутри защищенного пространства | X | X | X | X | X | ||||
5.6 | Применение режимов работы робототехнической системы | |||||||||||
5.6.1 | Робототехническая система в составе роботизированного модуля, включающего несколько роботов, не выбранная для работы, остается в безопасном состоянии | X | X | X | X | X | ||||||
5.6.1 | Роботы в составе роботизированного модуля, которые не управляются вручную, не создают опасности | X | X | X | X | X | ||||||
5.6.2 | Не допускается неавторизованный или непреднамеренный выбор режима | X | X | X | X | |||||||
5.6.2 | Средства выбора только разрешают работу в выбранном режиме, но не запускают его | X | X | X | X | X | ||||||
5.6.2 | Отдельное действие требуется для того, чтобы инициировать работу робота | X | X | X | X | X | ||||||
5.6.2 | Обеспечена однозначная индикация режима работы | X | X | X | ||||||||
5.6.2 | Изменение режима работы не вызывает опасность | X | X | X | X | |||||||
5.6.3.1 | Появление человека в защищенном пространстве при работе в автоматическом режиме вызывает защитную остановку | X | X | X | X | X | ||||||
5.6.3.2 | Выбор автоматического режима не прерывает состояние защитной или аварийной остановки | X | X | X | X | |||||||
5.6.3.2 | Выбор автоматического режима осуществляется извне защищенного пространства | X | X | X | X | X | X | X | ||||
5.6.3.2 | Переключение из автоматического режима вызывает остановку | X | X | X | ||||||||
5.6.3.3 | Автоматическая работа инициируется извне защищенного пространства | X | X | X | X | X | ||||||
5.6.3.3 | Инициирование автоматического режима возможно только в том случае, когда все средства обеспечения безопасности активны | X | X | X | X | X | ||||||
5.6.3.4 | Запуск и перезапуск являются простыми операциями | X | X | X | X | |||||||
5.6.3.4 | Меры защиты функционируют до начала запуска или перезапуска | X | X | X | X | X | ||||||
5.6.3.4 | Связанная с безопасностью функция управления соответствует 5.2.2 | X | X | X | X | |||||||
5.6.3.4 | Обеспечены управляемые вручную блокировки запуска и перезапуска | X | X | X | ||||||||
5.6.3.4 | Персонал, находящийся в защищенном пространстве, защищен от запуска и перезапуска | X | X | X | X | X | X | X | ||||
5.6.3.4 | Средства ручного управления запуском и перезапуском не могут быть задействованы изнутри защищенного пространства | X | X | X | X | X | X | |||||
5.6.3.4 | Функциональная безопасность и меры защиты обеспечены для того, чтобы никто не находился в защищенном пространстве перед запуском и перезапуском | X | X | X | X | X | ||||||
5.6.3.4 | Определение присутствия человека или аудиовизуальный предупреждающий сигнал обеспечены при необходимости | X | X | X | X | X | ||||||
5.6.3.4 | В защищенном пространстве обеспечены доступные устройства аварийной остановки | X | X | X | ||||||||
5.6.4.1 | Для локального управления в ручном режиме используется выносной пульт | X | X | X | X | X | ||||||
5.6.4.1 | Расположение устройств управления позволяет видеть рабочее пространство | X | X | X | ||||||||
5.6.4.1 | Устройство управления остановкой расположено около каждого устройства управления запуском | X | X | X | X | X | ||||||
5.6.4.1 | При локальном управлении запрещено управление от других источников | X | X | X | X | |||||||
5.6.4.2 | Выполнена регулировка ЦТИ с использованием механизма смещения | X | X | X | X | X | ||||||
5.6.4.2 | Максимальная скорость ЦТИ менее 250 мм/с | X | X | X | X | X | ||||||
5.6.4.2 | Вычисление, требуется ли более медленная скорость | X | ||||||||||
5.6.4.2 | Для движения требуется работоспособное деблокирующее устройство | X | X | X | X | X | ||||||
5.6.4.3 | Выносные пульты соответствуют требованиям ИСО 10218-1 | X | X | X | ||||||||
5.6.4.3 | В информации по использованию представлен функциональный тест деблокирующего устройства | X | ||||||||||
5.6.5 | Дистанционное управление возможно только в ручном режиме | X | X | X | X | X | ||||||
5.6.5 | При дистанционном управлении в любой момент времени активным является только один источник управления | X | X | X | X | |||||||
5.6.5 | При дистанционном управлении не может быть изменен локальный выбор и создана опасная ситуация | X | X | X | X | |||||||
5.6.5 | Активизация функции дистанционного управления возможна только с локального устройства управления работой | X | X | X | X | |||||||
___________________ * Текст документа соответствует оригиналу. - . | ||||||||||||
5.6.5 | Существуют ограничения для дистанционного изменения параметров связанного с безопасностью программного обеспечение* задания оси и ограничения пространства | X | X | X | ||||||||
5.6.5 | В информации по использованию приведены требования для ручного дистанционного управления | X | X | |||||||||
5.7 | Выносные пульты управления | |||||||||||
5.7.1 | Выносные пульты, используемые внутри защищенного пространства, соответствуют ИСО 10218-1 | X | X | X | X | X | ||||||
5.7.1 | Ручной пульт для аварийной остановки соответствует 5.3.8.2 | X | X | X | X | X | X | |||||
5.7.1 | Выносные пульты с кабельным соединением имеют достаточную длину и надежность кабеля | X | X | X | X | X | ||||||
5.7.1 | Хранение выносных пультов не допускает их повреждения | X | X | X | X | X | X | |||||
5.7.2 | Бескабельные или отсоединяемые выносные пульты соответствуют требованиям ИСО 10218-1 | X | X | X | X | X | ||||||
5.7.2 | Аварийная остановка и деблокирующее устройство соответствуют ИСО 10218-1 | X | X | X | X | X | ||||||
5.7.2 | Непреднамеренное управление не допускается | X | X | X | X | X | X | |||||
5.7.2 | Бескабельный выносной пульт не соединен одновременно более чем с одним роботом | X | X | X | X | X | X | |||||
5.7.2 | Пропадание сигнала вызывает остановку и сознательное действие по перезапуску | X | X | X | X | |||||||
5.7.2 | Расстыковка и хранение соответствуют требованиям | X | X | X | X | X | X | |||||
5.7.2 | Обеспечена единственная точка управления | X | X | X | X | |||||||
5.7.3 | При управлении от выносного пульта несколькими роботами имеется индикация, какой робот управляется в данное время | X | X | X | ||||||||
5.7.3 | Если выбрано несколько роботов, то все они находятся в одинаковом режиме работы | X | X | X | X | X | ||||||
5.7.3 | Невыбранные роботы не представляют опасности | X | X | X | X | X | ||||||
5.7.4 | Органы управления для проведения робота по траектории вручную соответствуют требованиям ИСО 10218-1 | X | X | X | X | X | X | |||||
5.8 | Техническое обслуживание и ремонт | |||||||||||
5.8.1 | Процедуры по осмотру и техническому обслуживанию предоставлены, учитывают рекомендации изготовителя и обеспечивают непрерывную безопасную работу | X | X | X | X | X | ||||||
5.8.1 | В информации по использованию содержатся требования к периодическому функциональному тестированию связанных с безопасностью элементов оборудования | X | X | X | ||||||||
5.8.2 | Конструкция системы обеспечивает безопасный доступ для технического обслуживания | X | X | X | X | X | ||||||
5.8.2 | Система имеет средства для контроля опасной энергии с использованием подробностей, представленных в информации по использованию | X | X | X | X | X | X | |||||
5.8.2 | Система имеет подходящие альтернативные средства обеспечения безопасности для задач, которые должны выполняться без изоляции энергии | X | X | X | X | X | X | X | ||||
5.8.3 | Ограждения имеют необходимые размеры и обеспечивают легкий доступ | X | X | X | X | X | ||||||
5.8.3 | Стационарные ограждения, предназначенные для нечастого технического обслуживания или сервисных задач, могут быть удалены только с помощью инструмента | X | X | X | ||||||||
5.8.3 | Безопасность мест, требующих частого доступа, обеспечена с помощью защитных устройств, предпочтительно, съемных ограждений. Съемные ограждения не инициируют команду запуска при достижении безопасной позиции | X | X | X | X | X | X | |||||
5.8.3 | Обеспечены дополнительные меры защиты в том случае, если имеется возможность пребывания человека в защищенном пространстве, когда схемные* ограждения установлены | X | X | X | X | X | X | X | ||||
_____________ * Вероятно, ошибка оригинала. Следует читать: съемные ограждения. - . | ||||||||||||
5.8.3 | Устройство, определяющее присутствие человека, используемое совместно с блокировкой перезапуска, соответствует минимальным требованиям для оборудования типа 2 по МЭК 61496-1 | X | X | X | X | X | X | |||||
5.9 | Интерфейс с интегрированной производственной системой (ИПС) | |||||||||||
5.9.1 | При общей оценке рисков и интеграции системы учтены опасности, создаваемые другим оборудованием, расположенным в защищенном пространстве | X | X | X | X | |||||||
5.9.2 | ИПС имеет единую функцию аварийной остановки, действующую на все задействованные элементы машины | X | X | X | X | X | X | |||||
5.9.2 | Аварийная остановка соответствует 5.3.8.2 | X | X | X | X | X | ||||||
5.9.2 | Информация по использованию содержит данные о диапазоне управления каждого устройства аварийной остановки | X | ||||||||||
5.9.3 | Связанные с безопасностью органы управления между ИПС и роботом соответствуют 5.2.2 | X | X | X | X | |||||||
5.9.3 | Цепи обеспечения безопасности реагируют на опасные движения внутри зоны защиты и на интерфейсах с соседними зонами | X | X | X | X | X | X | X | ||||
5.9.4 | Система управления ИПС уведомлена о выборе локального управления | X | X | X | ||||||||
5.9.4 | Локальное управление не может быть отменено системой управления ИПС | X | X | X | ||||||||
5.9.4 | Функции аварийной и защитной остановки остаются действующими во время локального управления | X | X | X | X | |||||||
5.9.4 | Средства для выбора локального управления расположены в непосредственной близости от управляемых элементов | X | X | X | X | |||||||
5.9.4 | Отмена выбора локального управления не создает опасные условия изнутри защищенного пространства | X | X | X | X | X | X | |||||
5.9.4 | Если отмена выбора может произойти внутри защищенного пространства, то требуется отдельное подтверждение извне роботизированного модуля | X | X | X | X | X | ||||||
5.9.5 | Дополнительные деблокирующие устройства соответствуют 5.3.15 | X | X | X | X | |||||||
5.9.5 | Деблокирующее устройство соединено с необходимыми зонами ИПС | X | X | X | X | X | X | |||||
5.9.6 | Выбор режима соответствует ИСО 10218-1 | X | X | X | X | |||||||
5.9.7 | ИПС спроектирована так, чтобы обеспечить безопасное ручное вмешательство, включая при необходимости зонирование | X | X | X | X | X | X | X | ||||
5.9.7 | Интеграция робототехнической системы в пространство выполнения задачи выполнена в соответствии с ИСО 11161 | X | X | X | ||||||||
5.10 | Средства обеспечения безопасности | |||||||||
5.10.1 | Ограждения и защитные устройства соответствуют требованиям ИСО 12100 | X | ||||||||
5.10.2 | При выборе периметровых средств обеспечения безопасности учтены все опасности и планируемые задачи | X | X | X | X | |||||
5.10.3.1 | Средства обеспечения безопасности правильно расположены и надежно установлены | X | X | X | X | |||||
5.10.3.2 | Стационарные и съемные ограждения соответствуют требованиям ИСО 14120 | X | X | X | ||||||
5.10.3.2 | Минимальное расстояние от любой опасности до стационарных и съемных ограждений определено в соответствии с требованиями ИСО 13857 | X | X | X | ||||||
5.10.3.2 | В случае предотвращения доступа с помощью ограждений, для определения минимального безопасного расстояния использован ИСО 13857 | X | X | X | ||||||
5.10.3.3 | Защитные устройства, определяющие присутствие человека, которые предотвращают запуск или перезапуск, соответствуют 5.10.5.3 | X | X | X | X | X | ||||
5.10.3.4 | Защитные устройства, определяющие присутствие человека, которые обеспечивают зазоры, соответствуют 5.10.5.3 | X | X | X | X | X | ||||
5.10.4.1 | Все ограждения соответствуют относящимся к ним требованиям ИСО 12100 и ИСО 14120 | X | X | |||||||
5.10.4.1 | Блокирующие устройства, связанные с ограждениями, соответствуют предъявляемым к ним требованиям | X | X | X | X | |||||
5.10.4.1 | Для снятия стационарных ограждений требуется инструмент | X | X | |||||||
5.10.4.1 | В необходимых случаях фиксирующие системы прикреплены к ограждениям или механизмам при их удалении | X | X | |||||||
5.10.4.1 | Периметровые средства обеспечения безопасности не установлены к опасности ближе границ ограниченного пространства (см. исключения в 5.10.4) | X | X | X | X | X | ||||
5.10.4.2 | Зазор между низом ограждения и полом или другие разрывы в ограждении не могут позволить человеку проникнуть над, под, вокруг или через ограждение и встретиться с опасностью | X | X | X | ||||||
5.10.4.2 | Высота ограждения не менее 1400 мм | X | ||||||||
5.10.4.3 | Блокирующие устройства, связанные со съемными ограждениями, соответствуют предъявляемым к ним требованиям | X | X | X | ||||||
5.10.4.3 | Съемные ограждения в установленном состоянии не позволяют операторам попасть в опасные пространства | X | X | X | ||||||
5.10.4.3 | Съемные ограждения открываются вбок или от опасности, но не в защищенное пространство | X | X | X | ||||||
5.10.4.3 | Блокировка обеспечивает приведение опасностей в безопасное состояние до того, как оператор сможет получить к ним доступ | X | X | |||||||
5.10.4.3 | Съемные ограждения установлены правильно (см. также 5.10.3.2) | X | X | X | ||||||
5.10.4.3 | Съемные ограждения, используемые для инициирования запуска при их закрытии (контрольные ограждения) соответствуют предъявляемым к ним требованиям | X | X | X | ||||||
5.10.4.3 | Функция блокировки съемных ограждений соответствует по меньшей мере требованиям 5.2.2 | X | X | |||||||
5.10.4.3 | Приводы приведения в исходное состояние съемного ограждения соответствуют 5.6.3.4 | X | X | X | ||||||
5.10.4.4 | При необходимости блокировка ограждения обеспечивается в дополнение к блокировке управления | X | X | X | ||||||
5.10.4.4 | Блокировка ограждения соответствует 5.10.4.4. а) и b) | X | X | X | ||||||
5.10.4.4 | Параметры технологического процесса, используемые в качестве условия для блокировки или разблокировки, соответствуют тем же требованиям по функциональной безопасности, что и функция блокировки | X | X | X | X | X | ||||
5.10.4.5 | В защищенном пространстве имеются средства, не допускающие запирания в нем человека | X | X | X | ||||||
5.10.5.1 | Чувствительное к электричеству и к давлению защитное оборудование соответствует предъявляемым к нему требованиям | X | ||||||||
5.10.5.2 | Чувствительное защитное оборудование, используемое для инициирования защитной остановки, расположено надлежащим образом | X | X | X | ||||||
5.10.5.2 | Чувствительное защитное оборудование надежно установлено и расположено так, чтобы оператор не мог обойти зону детектирования | X | X | X | X | |||||
5.10.5.2 | Защитная остановка инициируется, если чувствительное защитное оборудование срабатывает при наличии опасных условий | X | X | X | X | |||||
5.10.5.2 | После возникновения опасных условий, контролируемых чувствительным защитным оборудованием, не допускаются опасные движения или ситуации до тех пор, пока чувствительное защитное оборудование не будет возвращено в исходное состояние | X | X | X | ||||||
5.10.5.2 | Возврат в исходное состояние чувствительного защитного оборудования само по себе не создает опасных условий | X | X | |||||||
5.10.5.2 | Формула для расчета минимального безопасного расстояния используется для определения минимального расстояния до чувствительного защитного оборудования со всех направлений, с учетом максимального приближения подвижных элементов в каждом направлении | X | X | |||||||
5.10.5.2 | Если части тела оператора могут оставаться в огороженном пространстве, то предусмотрены дополнительные меры по предотвращению опасных ситуаций | X | X | X | X | |||||
5.10.5.2 | Если существует возможность для оператора быть скрытым от места расположения управления возвратом в исходное состояние, то предусмотрены дополнительные меры защиты по предотвращению возврата в исходное состояние блокировки перезапуска | X | X | X | X | |||||
5.10.5.2 | Для возврата в исходное состояние блокировки перезапуска требуется осознанное действие человека | X | ||||||||
5.10.5.3 | Чувствительное к присутствию человека защитное оборудование, используемое для предотвращения запуска, применяется совместно с другими мерами обеспечения безопасности | X | X | X | X | |||||
5.10.5.3 | Устройства, определяющие присутствие человека, расположены и сконфигурированы так, чтобы человек или часть его тела фиксировались во всей зоне детектирования | X | X | X | ||||||
5.10.5.3 | При необходимости предприняты дополнительные меры по обеспечению невозможности обхода зоны детектирования | X | X | X | X | |||||
5.10.6.1 | Предприняты меры для обеспечения того, чтобы оператор не подвергался новым опасностям при работе на участке выполнения ручных погрузо-разгрузочных операций | X | X | |||||||
5.10.6.1 | Предприняты меры по предотвращению подвергания оператора опасностям, связанным с конкретным применением | X | X | X | X | X | X | |||
5.10.6.2 | Предприняты меры по предотвращению контакта оператора с опасностями, связанными с движениями управляемых вручную устройств | X | X | X | X | X | ||||
5.10.6.2 | Зазор между подвижным элементом и любыми неподвижными элементами не должен превышать 120 мм | X | X | |||||||
5.10.6.3 | При использовании чувствительности к присутствию человека для определения нахождения оператора в совместном рабочем пространстве зона детектирования данного устройства охватывает все совместное рабочее пространство | X | X | X | X | |||||
5.10.6.3 | В случае применения блокировки перезапуска в совместном рабочем пространстве обеспечены меры по предотвращению случайного возврата в исходное состояние блокировки перезапуска | X | X | X | ||||||
5.10.6.3 | В случае применения ручного возврата в исходное состояние в совместном рабочем пространстве все совместное рабочее пространство просматривается с места расположения устройства возврата в исходное состояние либо предприняты дополнительные меры | X | X | X | X | X | ||||
5.10.7 | Окна для подачи и выдачи материальных объектов имеют минимальные необходимые размеры | X | X | X | X | |||||
5.10.7 | Опасности раздавливания/срезания, возникающие между материальным объектом и краями окна, предотвращены | X | X | X | ||||||
5.10.7 | Доступ к опасности не допускается или определяется | X | X | X | X | X | ||||
5.10.7 | ЭЧЗО разрешает прохождение материальных объектов либо с помощью функции подавления, либо с помощью изменения зоны защиты (например, затемнения защитного луча) | X | X | X | X | X | X | X | ||
5.10.7 | Функция подавления соответствует требованиям ИСО 13849-1 | X | X | |||||||
5.10.7 | Уровень функциональной безопасности для подавления или изменения зоны защиты (например, затемнения защитного луча) по меньшей мере совпадает с уровнем функциональной безопасности, определенным для ЭЧЗО с помощью общей оценки рисков | X | X | X | ||||||
5.10.8 | Предприняты меры для предотвращения доступа оператора или снижения опасностей в соседних роботизированных модулях | X | X | X | X | X | ||||
5.10.8 | Стационарные ограждения, используемые для предотвращения доступа в соседние модули, имеют высоту не менее 1400 мм | X | X | |||||||
5.10.8 | Выбор не стационарных ограждений, а других мер соответствует 4.5 | X | X | X | ||||||
5.10.8 | Меры, ослабленные для выполнения производственных операций, соответствуют уровню функциональной безопасности, определенному с помощью общей оценки рисков | X | X | X | X | X | ||||
5.10.9 | Рабочие органы и системы смены инструмента разработаны и построены так, чтобы отключение или восстановление подачи энергии не вызывало опасности | X | X | X | X | X | ||||
5.10.9 | Конструкция системы смены инструмента обеспечивает то, что ее неправильное использование не создает опасную ситуацию | X | X | X | X | X | ||||
5.10.9 | Смена инструмента возможна только в специально предусмотренном для этого положении | X | X | X | X | |||||
5.10.9 | Система смены инструмента соответствует ожидаемым статическим и динамическим требованиям | X | X | X | X | |||||
5.10.10 | Применение подавления ограничено только необходимыми технологическими процессами | X | X | X | X | X | X | |||
5.10.10 | Человек не может оставаться нераспознанным в опасной зоне после завершения подавления | X | X | X | ||||||
5.10.10 | Функция подавления инициируется и завершается автоматически при правильном определении условий для подавления | X | X | X | X | |||||
5.10.10 | Функция подавления достигает того же уровня характеристик безопасности, что и подавляемая защитная функция | X | X | X | X | X | ||||
5.10.10 | Уровень характеристик функции подавления не имеет негативного влияния на уровень характеристик защитной функции | X | X | X | X | X | ||||
5.10.10 | В случае сбоя функции подавления последующее подавление не допускается до тех пор, пока данный сбой не будет исправлен | X | X | X | ||||||
5.10.10 | Описание средств, расположения, зон и функциональности подавления приведено в информации по использованию | X | X | |||||||
5.10.11 | Задачи, требующие временного прекращения работы средств обеспечения безопасности, выполняются в специальном режиме работы | X | X | X | X | X | X | |||
5.10.11 | Выбор режима работы осуществляется с помощью надежных средств | X | X | X | X | X | ||||
5.10.11 | Случаи, когда автоматически происходит временная приостановка работы средств обеспечения безопасности, соответствуют требованиям 5.10.11, перечисления а)-f) | X | X | X | X | X | ||||
5.10.11 | В случаях, когда автоматически происходит временная приостановка работы средств обеспечения безопасности, оборудование, не требующееся для данных задач, находится в состоянии защитной остановки или под непосредственным управлением оператора | X | X | X | X | |||||
5.10.11 | В информации по использованию представлены сведения о критических ситуациях, когда необходимо вручную временно приостанавливать работу средств обеспечения безопасности | X |
5.11 | Роботы, работающие совместно с человеком | |||||||||
5.11.1 | В информации по использованию содержится описание необходимых средств обеспечения безопасности и выбора режимов работы | X | ||||||||
5.11.2 | Интегратор выполнил общую оценку рисков с учетом всего рабочего пространства, предназначенного для совместной работы [см. 5.11.2 а)] | X | X | X | ||||||
5.11.2 | Роботы, работающие в совместном пространстве, соответствуют требованиям ИСО 10218-1 | X | X | X | X | |||||
5.11.2 | Защитное устройство (устройства) для определения присутствия человека соответствует требованиям 5.2.2 | X | X | X | ||||||
5.11.2 | Дополнительное защитное устройство (устройства) в совместном рабочем пространстве соответствует требованием 5.2 | X | X | X | ||||||
5.11.2 | Разработаны и установлены средства обеспечения безопасности, предотвращающие проход человека в глубь роботизированного модуля (за пределы совместного рабочего пространства) или определяющие входящего туда человека | X | X | X | X | X | ||||
5.11.2 | Робот останавливается и снижает опасность, если происходит проникновение в защищенное пространство вне совместного рабочего пространства | X | X | X | ||||||
5.11.2 | Периметровые средства обеспечения безопасности предотвращают вход людей в несовместное защищенное пространство или выявляют входящих в него людей | X | X | X | X | |||||
5.11.2 | Другие машины в совместном рабочем пространстве со связанными с безопасностью функциями соответствуют 5.2, если только при общей оценке рисков не было определено другое | X | X | X | X | |||||
5.11.3 | Совместное рабочее пространство, в котором происходит непосредственное взаимодействие между человеком и роботом, четко определено (например, маркировкой на полу, специальными знаками и т.д.) | X | X | X | ||||||
5.11.3 | Рабочие характеристики робота в сочетании с защитными устройствами соответствуют 5.2.2 | X | X | X | X | |||||
5.11.3 | Если несколько человек участвуют в выполнении совместной операции, то каждый из них защищен средствами управления, соответствующими 5.2.2 | X | X | X | X | X | ||||
5.11.3 | Совместное рабочее пространство позволяет легко выполнять поставленные задачи | X | X | X | X | X | ||||
5.11.3 | Расположение оборудования не создает дополнительных опасностей | X | X | X | X | |||||
5.11.3 | Присутствуют дополнительные меры защиты для предотвращения опасностей застревания или зажатия в местах, в которых зазоры составляют менее 500 мм | X | X | X | X | X | X | |||
5.11.4 | Переход от автономной работы к совместной и наоборот не подвергает опасности персонал | X | X | X | X | X | X | X | X | |
5.11.5.1 | Выбраны необходимые характеристики работы робота для выполнения совместных с человеком операций | X | X | |||||||
5.11.5.1 | Обнаруженная неисправность выбранных средств обеспечения безопасности приводит к защитной остановке в соответствии с 5.3.8.3 | X | X | X | X | X | ||||
5.11.5.1 | Если обнаружена неисправность, то автономная работа возобновляется только после преднамеренного перезапуска извне совместного рабочего пространства | X | X | X | X | X | ||||
5.11.5.2 | Если используется технология связанной с безопасностью контролируемой остановки, то при входе человека в совместное рабочее пространство движение робота останавливается и поддерживается связанное с безопасностью состояние контролируемой остановки | X | X | X | X | X | ||||
5.11.5.3 | При проведении робота по траектории вручную, если он достигает заданного положения, то осуществляется связанная с безопасностью контролируемая остановка в соответствии с ИСО 10218-1 | X | X | X | X | X | ||||
5.11.5.3 | Устройство для проведения робота по траектории вручную соответствует требованиям ИСО 10218-1 | X | X | X | X | |||||
5.11.5.3 | При проведении робота по траектории вручную имеет место ясная видимость всего совместного рабочего пространства | X | X | X | ||||||
5.11.5.3 | Если оператор отпускает устройство для управления роботом вручную, то осуществляется связанная с безопасностью контролируемая остановка в соответствии с ИСО 10218-1 | X | X | X | X | X | ||||
5.11.5.4 | Если используется технология контроля скорости и положения, то роботы в совместном пространстве соответствуют требованиям ИСО 10218-1 | X | X | X | X | |||||
5.11.5.4 | Параметры определены с помощью общей оценки рисков, а руководство приведено в ИСО/ТС 15066 | X | X | X | ||||||
5.11.5.5 | Если используется технология ограничения мощности и усилия, то роботы в совместном пространстве соответствуют требованиям ИСО 10218-1 | X | X | X | X | |||||
5.11.5.5 | Параметры определены с помощью общей оценки рисков, а руководство приведено в ИСО/ТС 15066 | X | X | X | ||||||
5.12 | Ввод в эксплуатацию робототехнических систем | |||||||||
5.12.1 | План ввода в эксплуатацию содержит информацию о мерах защиты (временном обеспечении безопасности), необходимых в процессе ввода в эксплуатацию | X | X | X | X | |||||
5.12.2 | Средства временного обеспечения безопасности защищают от опасностей, выявленных при общей оценке рисков | X | X | X | X | X | ||||
5.12.2 | Как минимум установлены информационные барьеры, определяющие ограниченное пространство | X | X | |||||||
5.12.2 | Временные средства обеспечения безопасности определены в информации по использованию | X | ||||||||
5.12.3 | План процедуры начального запуска включает как минимум элементы, перечисленные в 5.12.3 | X | ||||||||
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта, документа | Степень соответствия | Обозначение и наименование соответствующего национального, межгосударственного стандарта |
ISO 4413 | - | * |
ISO 4414 | - | * |
ISO 8995-1 | - | * |
ISO 9946 | IDT | ГОСТ Р 60.3.1.1-2016/ИСО 9946:1999 "Роботы промышленные манипуляционные. Представление характеристик" |
ISO 10218-1 | IDT | ГОСТ Р 60.1.2.1-2016/ИСО 10218-1:2011 "Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы" |
ISO 11161 | IDT | ГОСТ Р ИСО 11161-2010 "Безопасность машинного оборудования. Интегрированные производственные системы. Основные требования" |
ISO 12100 | MOD | ГОСТ Р 54125-2010 (ИСО 12100:2010) "Безопасность машин и оборудования. Принципы обеспечения безопасности при проектировании" |
________________ | ||
ISO 13849-1:2006 | IDT | ГОСТ ISO 13849-1-2014 "Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования" |
ISO 13850 | - | * |
ISO 13854 | - | * |
ISO 13855 | IDT | ГОСТ ИСО 13855-2006 "Безопасность оборудования. Расположение защитных устройств с учетом скоростей приближения частей тела человека" |
ISO 13856 (all parts) | - | * |
ISO 13857 | IDT | ГОСТ ISO 13857-2012 "Безопасность машин. Безопасные расстояния для предохранения верхних и нижних конечностей от попадания в опасную зону" |
ISO 14118 | - | * |
ISO 14119 | - | * |
ISO 14120 | - | * |
ISO 14122 (all parts) | IDT | ГОСТ Р ИСО 14122 "Безопасность машин. Средства доступа к машинам стационарные" |
IEC 60204-1 | IDT | ГОСТ Р МЭК 60204-1-2007 "Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования" |
IEC 61496-1 | IDT | ГОСТ IEC 61496-1-2016 "Безопасность механизмов. Защитная электрочувствительная аппаратура. Часть 1. Общие требования и испытания" |
IEC 61800-5-2 | IDT | ГОСТ Р МЭК 61800-5-2-2015 "Системы силовых электроприводов с регулируемой скоростью. Часть 5-2. Требования функциональной безопасности" |
IEC/TS 62046 | - | * |
IEC 62061:2005 | IDT | ГОСТ Р МЭК 62061-2015 "Безопасность оборудования. Функциональная безопасность систем управления электрических, электронных и программируемых электронных, связанных с безопасностью" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта, документа. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | ISO 8373:1994, Manipulating industrial robots - Vocabulary |
[2] | ISO 13849-2, Safety of machinery - Safety-related parts of control systems - Part 2: Validation |
[3] | ISO 13851, Safety of machinery - Two-hand control devices - Functional aspects and design principles |
[4] | ISO 14123-1, Safety of machinery - Reduction of risks to health from hazardous substances emitted by machinery - Part 1: Principles and specifications for machinery manufacturers |
[5] | ISO 14123-2, Safety of machinery - Reduction of risks to health from hazardous substances emitted by machinery - Part 2: Methodology leading to verification procedures |
[6] | ISO 14159, Safety of machinery - Hygiene requirements for the design of machinery |
[7] | ISO 14738, Safety of machinery - Anthropometric requirements for the design of workstations at machinery |
[8] | ISO/TS 15066, Robots and robotic devices - Safety requirements - Industrial collaborative workspace |
[9] | ISO 19353, Safety of machinery - Fire prevention and protection |
[10] | ISO/TR 23849, Guidance on the application of ISO 13849-1 and IEC 62061 in the design of safety-related control systems for machinery |
[11] | IEC 60204 (all parts), Safety of machinery - Electrical equipment of machines |
[12] | IEC 60364-7-729, Low-voltage electrical installations - Part 7-729: Requirements for special installations or locations - Operating or maintenance gangways |
[13] | IEC 61496-2, Safety of machinery - Electro-sensitive protective equipment - Part 2: Particular requirements for equipment using active optoelectronic protective devices (AOPDs) |
[14] | IEC 61496-3, Safety of machinery - Electro-sensitive protective equipment - Part 3: Particular requirements for Active Optoelectronic Protective Devices responsive to Diffuse Reflection (AOPDDR) |
[15] | IEC/TR 61496-4, Safety of machinery - Electro-sensitive protective equipment - Part 4: Particular requirements for equipment using vision based protective devices (VBPD) |
[16] | IEC 62079, Preparation of instructions - Structuring, content and presentation |
[17] | EN 563, Safety of machinery - Temperatures of touchable surfaces - Ergonomics data to establish temperature limit values for hot surfaces |
[18] | EN 1093 (all parts), Safety of machinery - Evaluation of the emission of airborne hazardous substances |
[19] | EN 1127-1, Explosive atmospheres - Explosion prevention and protection - Part 1: Basic concepts and methodology |
[20] | EN 1127-2, Explosive atmospheres - Explosion prevention and protection - Part 2: Basic concepts and methodology for mining |
[21] | EN 1837, Safety of machinery - Integral lighting of machines |
[22] | EN 12198 (all parts), Safety of machinery - Assessment and reduction of risks arising from radiation emitted by machinery |
[23] | CEN/TR 14715, Safety of machinery - Ionizing radiation emitted by machinery - Guidance for the application of technical standards in the design of machinery in order to comply with legislative requirements |
[24] | BGIA/DGUV study - Procedural Guideline for the Arrangement of Workplaces with Collaborative Robots |
УДК 656.072:681.3:006.354 |
|
| ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, требования по безопасности, безопасность роботов, робототехнические системы, интеграция робототехнических систем | |||
Электронный текст документа
и сверен по:
, 2020
{kind=link}