ГОСТ Р ИСО 10303-502-2006
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Системы автоматизации производства и их интеграция
ПРЕДСТАВЛЕНИЕ ДАННЫХ ОБ ИЗДЕЛИИ И ОБМЕН ЭТИМИ ДАННЫМИ
Часть 502
Прикладные интерпретированные конструкции. Каркасное представление формы на основе оболочек
Industrial automation systems and integration. Product data representation and exchange. Part 502. Application interpreted constructions. Shell-based wireframe
ОКС 25.040.40
Дата введения 2007-07-01
Предисловие
1 ПОДГОТОВЛЕН Государственным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 27 декабря 2006 г. N 487-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 10303-502:2000* "Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 502. Прикладные интерпретированные конструкции. Каркасное представление формы на основе оболочек" (ISO 10303-502:2000 "Industrial automation systems and integration - Product data representation and exchange - Part 502: Application interpreted construct: Shell-based wireframe", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Март 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ИСО 10303 распространяются на компьютерное представление информации об изделиях и обмен данными об изделиях. Их целью является обеспечение нейтрального механизма, способного описывать изделия на всем протяжении их жизненного цикла. Этот механизм применим не только для нейтрального обмена файлами, но является также основой для реализации и совместного доступа к базам данных об изделиях и организации архивирования.
Стандарты комплекса ИСО 10303 представляют собой набор отдельно издаваемых стандартов (частей). Стандарты данного комплекса относятся к одной из следующих тематических групп: методы описания, интегрированные ресурсы, прикладные интерпретированные конструкции, прикладные протоколы, комплекты абстрактных тестов, методы реализации и аттестационное тестирование. Группы стандартов данного комплекса описаны в ИСО 10303-1. Настоящий стандарт входит в группу прикладных интерпретированных конструкций.
Прикладная интерпретированная конструкция (ПИК) обеспечивает логическую группировку интерпретированных конструкций, поддерживающих конкретную функциональность для использования данных об изделии в разнообразных прикладных контекстах. Интерпретированная конструкция представляет собой обычную интерпретацию интегрированных ресурсов, поддерживающую требования совместного использования информации прикладными протоколами.
Настоящий стандарт определяет прикладную интерпретированную конструкцию для описания формы изделия посредством трехмерных моделей каркасного представления формы, ограниченных связанными совокупностями оболочек.
1 Область применения
Настоящий стандарт определяет интерпретацию интегрированных ресурсов, обеспечивающую соответствие требованиям к представлению формы изделия посредством использования трехмерных каркасных моделей, ограниченных совокупностью оболочек.
Область применения настоящего стандарта распространяется на:
- представление каркасных моделей, описываемых графом, состоящим из ребер и вершин, в котором ребра пересекаются только в их вершинах;
- представление каркасной модели одной или несколькими оболочками, которые должны перекрываться или пересекаться только в их вершинах или ребрах;
- точки, описываемые в трехмерном координатном пространстве;
- кривые, включая b-сплайны, описываемые в трехмерном координатном пространстве;
- представление отдельной каркасной модели или сборки каркасных моделей.
Область применения настоящего стандарта не распространяется на:
- геометрию, определенную в двумерном координатном пространстве;
- геометрию поверхности;
- геометрию твердого тела;
- ссылки на исключенные конструкции.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO/IEC 8824-1:1995, Information technology - Abstract Syntax Notation One (ASN.1): Specification of basic notation [Информационные технологии. Взаимосвязь открытых систем. Абстрактная синтаксическая нотация версии один (AСН.1). Часть 1. Спецификация основной нотации]
______________________
Заменен на ISO/IEC 8824-1:2015.
ISO 10303-1:1994, Industrial automation systems and integration - Product data representation and exchange - Part 1: Overview and fundamental principles (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 1. Общие представления и основополагающие принципы)
ISO 10303-11:1994, Industrial automation systems and integration - Product data representation and exchange - Part 11: Description methods: The EXPRESS language reference manual (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 11. Методы описания. Справочное руководство по языку EXPRESS)
___________________
Заменен на ISO 10303-11:2004.
ISO 10303-41:1994, Industrial automation systems and integration - Product data representation and exchange - Part 11: Description methods: The EXPRESS language reference manual (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 41. Интегрированные обобщенные ресурсы. Основы описания и поддержки изделий)
___________________
Заменен на ISO 10303-41:1019
ISO 10303-42:1994, Industrial automation systems and integration - Product data representation and exchange - Part 42: Integrated generic resources: Geometric and topological representation (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 42. Интегрированные обобщенные ресурсы. Геометрическое и топологическое представление)
___________________
Заменен на ISO 10303-42:2019.
ISO 10303-43:1994, Industrial automation systems and integration - Product data representation and exchange - Part 43: Integrated generic resources: Representation structures (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 43. Интегрированные обобщенные ресурсы. Структуры представлений)
___________________
Заменен на ISO 10303-43:2018.
ISO 10303-202:1996, Industrial automation systems and integration - Product data representation and exchange - Part 202: Application protocol: Associative draughting (Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 202. Прикладные протоколы. Ассоциативные чертежи)
___________________
Заменен на ISO 10303-242:2014.
3 Термины и определения
3.1 Термины, определенные в ИСО 10303-1
В настоящем стандарте применены следующие термины:
- приложение (application);
- прикладной контекст (application context);
- прикладной протокол; ПП (application protocol; АР);
- метод реализации (implementation method);
- интегрированный ресурс (integrated resource);
- интерпретация (interpretation);
- модель (model);
- изделие (product);
- данные об изделии (product data).
3.2 Термин, определенный в ИСО 10303-202
В настоящем стандарте применен следующий термин:
- прикладная интерпретированная конструкция; ПИК (application interpreted construct; AIC).
4 Сокращенный листинг на языке EXPRESS
В настоящем разделе определена EXPRESS-схема, в которой используются элементы интегрированных ресурсов и содержатся типы, конкретизации объектов и функции, относящиеся к настоящему стандарту.
Примечание - Допускается существование подтипов и элементов списков выбора, которые появляются в интегрированных ресурсах, не импортированных в ПИК. Такие конструкции исключаются из дерева подтипов или списка выбора посредством правил неявного интерфейса, определенных в ИСО 10303-11.
EXPRESS-спецификация
*) SCHEMA aic_shell_based_wireframe; | |
USE FROM geometric_model_schema | -- ISO 10303-42 |
USE FROM geometry_schema point_replica, polyline, quasi_uniform_curve, rational_b_spline_curve, uniform_curve); | -- ISO 10303-42 |
USE FROM product_property_representation_schema | -- ISO 10303-41 |
USE FROM representation_schema | -- ISO 10303-43 |
USE FROM topology_schema | -- ISO 10303-42 |
(*
Примечание - Схемы, ссылки на которые даны выше, можно найти в следующих стандартах комплекса ИСО 10303:
geometric_model_schema | - ИСО 10303-42; | |||
geometry_schema | - ИСО 10303-42; | |||
product_property_representation_schema | - ИСО 10303-41; | |||
topology_schema | - ИСО 10303-42; | |||
representation_schema | - ИСО 10303-43. | |||
4.1 Введение
В настоящем стандарте определяются геометрические и топологические структуры для представления трехмерных форм с использованием оболочек размерности 0 (объект vertex_shell) или 1 (объект wire_shell). Данная ПИК представлена объектом shell_based_wireframe_shape_representation, который относится к типу shape_representation.
4.2 Основные понятия и допущения
Данное каркасное представление формы основывается на модели shell_based_wireframe_model и необходимых геометрических и топологических объектах. Определения форм, представленных объектом shell_based_wireframe_shape_representation, могут быть обеспечены совокупностями объектов vertex_shell или wire_shell. Каркасные представления могут быть компоновками других каркасных представлений, отображаемых на то же пространство координат.
4.3 Определение объекта shell_based_wireframe_shape_representation схемы aic_shell_based_wireframe
Объект shell_based_wireframe_shape_representation является трехмерным подтипом объекта shape_representation, представляющим форму или часть формы изделия каркасными конструкциями, определяющими не выраженный явно объем. Это включает в себя все трехмерные кривые и топологические объекты, определяющие граф, состоящий из вершин, ребер и замкнутых цепей.
Примечание - Прикладной протокол, в котором используется данная ПИК, может обеспечить реализацию объекта shape_representation как объекта shell_based_wireframe_shape_representation.
EXPRESS-спецификация *) | ||||||||||||||||||||||
ENTITY shell_based_wireframe_shape_representation | ||||||||||||||||||||||
SUBTYPE OF (shape_representation); | ||||||||||||||||||||||
WHERE | ||||||||||||||||||||||
WR1: SIZEOF (QUERY (it <* SELF.items | ||||||||||||||||||||||
NOT | ||||||||||||||||||||||
(SIZEOF(['AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL', | ||||||||||||||||||||||
'AIC_SHELL_BASED_WIREFRAME.MAPPED_ITEM', 'AIC_SHELL_BASED_WIREFRAME.AXIS2_PLACEMENT_3D']* | ||||||||||||||||||||||
TYPEOF (it))=1 | ||||||||||||||||||||||
)))=0; | ||||||||||||||||||||||
WR2: SIZEOF (QUERY (it <* SELF.items | ||||||||||||||||||||||
SIZEOF(['AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL', 'AIC_SHELL_BASED_WIREFRAME.MAPPED_ITEM']*TYPEOF (it))=1 | ||||||||||||||||||||||
))>=1; | ||||||||||||||||||||||
WR3: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (eloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.EDGE_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (el <* eloop\path.edge_list | ||||||||||||||||||||||
NOT ('AIC_SHELL_BASED_WIREFRAME.EDGE_CURVE' IN | ||||||||||||||||||||||
TYPEOF (el.edge_element))))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR4: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (eloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.EDGE_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (pline_el <* | ||||||||||||||||||||||
QUERY (el <* eloop\path.edge_list | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.POLYLINE' IN | ||||||||||||||||||||||
TYPEOF (el.edge_element\edge_curve.edge_geometry))) | ||||||||||||||||||||||
NOT (SIZEOF (pline_el.edge_element\edge_curve. | ||||||||||||||||||||||
edge_geometry\polyline.points)>2) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR5: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbw_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WlREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (eloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.EDGE_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (el <* eloop\path.edge_list | ||||||||||||||||||||||
NOT (valid_wireframe_edge_curve | ||||||||||||||||||||||
(el.edge_element\edge_curve.edge_geometry))))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR6: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF(it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (eloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.EDGE_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (el <* eloop\path.edge_list | ||||||||||||||||||||||
NOT (('AIC_SHELL_BASED_WIREFRAME.VERTEX_POINT' IN | ||||||||||||||||||||||
TYPEOF (el.edge_element.edge_start)) | ||||||||||||||||||||||
AND | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.VERTEX_POINT' IN | ||||||||||||||||||||||
TYPEOF (el.edge_element.edge_end)))))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR7: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (eloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.EDGE_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (el <* eloop\path.edge_list | ||||||||||||||||||||||
NOT((valid_wireframe_vertex_point | ||||||||||||||||||||||
(el.edge_element. edge_start\vertex_point.vertex_geometry)) | ||||||||||||||||||||||
AND | ||||||||||||||||||||||
(valid_wireframe_vertex_point | ||||||||||||||||||||||
(el.edge_element.edge_end\vertex_point.vertex_geometry))) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR8: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (vloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.VERTEX_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT ('AIC_SHELL_BASED_WIREFRAME.VERTEX_POINT' IN | ||||||||||||||||||||||
TYPEOF (vloop\vertex_loop.loop_vertex)) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR9: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (ws <* QUERY (SB <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.WIRE_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (vloop <* QUERY (wsb <* | ||||||||||||||||||||||
ws\wire_shell.wire_shell_extent | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.VERTEX_LOOP' IN TYPEOF (wsb))) | ||||||||||||||||||||||
NOT (valid_wireframe_vertex_point (vloop\vertex_loop. | ||||||||||||||||||||||
loop_vertex\vertex_point.vertex_geometry)) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR10: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (vs <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WlREFRAME.VERTEX_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT ('AIC_SHELL_BASED_WIREFRAME.VERTEX_POINT' IN | ||||||||||||||||||||||
TYPEOF (vs\vertex_shell.vertex_shell_extent.loop_vertex)) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR11: SIZEOF (QUERY (sbwm <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.SHELL_BASED_WIREFRAME_MODEL' | ||||||||||||||||||||||
IN TYPEOF (it))) | ||||||||||||||||||||||
NOT (SIZEOF (QUERY (vs <* QUERY (sb <* | ||||||||||||||||||||||
sbwm\shell_based_wireframe_model.sbwm_boundary | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.VERTEX_SHELL' IN TYPEOF (sb))) | ||||||||||||||||||||||
NOT (valid_wireframe_vertex_point (vs\vertex_shell. | ||||||||||||||||||||||
vertex_shell_extent.loop_vertex\vertex_point. vertex_geometry)) | ||||||||||||||||||||||
))=0) | ||||||||||||||||||||||
))=0; | ||||||||||||||||||||||
WR12: SIZEOF (QUERY (mi <* QUERY (it <* SELF.items | ||||||||||||||||||||||
('AIC_SHELL_BASED_WIREFRAME.MAPPED_ITEM' IN TYPEOF (it))) | ||||||||||||||||||||||
NOT ('AIC_SHELL_BASED_WIREFRAME.'+ | ||||||||||||||||||||||
'SHELL_BASED_WIREFRAME_SHAPE_REPRESENTATlON' IN | ||||||||||||||||||||||
TYPEOF (mi\mapped_item.mapping_source.mapped_representation) | ||||||||||||||||||||||
)))=0; | ||||||||||||||||||||||
WR13: SELF.context_of_items\geometric_representation_context. | ||||||||||||||||||||||
coordinate_space_dimension=3; | ||||||||||||||||||||||
END ENTITY; (* | ||||||||||||||||||||||
Формальные утверждения
WR1 - элементами items в объекте shell_based_wireframe_shape_representation должны быть shell_based_wireframe_model, mapped_item или axis2_placement_3d.
WR2 - по крайней мере один из элементов items в объекте shell_based_wireframe_shape_representation должен быть либо shell_based_wireframe_model, либо mapped_item.
WR3 - все ребра (объекты edge), образующие замкнутую цепь (объект edge_loop) в shell_based_wireframe_model, должны иметь тип edge_curve.
WR4 - каждый объект polyline, который лежит в основе объекта edge в shell_based_wireframe_model, должен быть определен более чем двумя различными точками (объектами point).
WR5 - объект edge_geometry, который лежит в основе объекта edge для edge_based_wireframe_model, должен иметь типы line, conic, b_spline_curve, offset_curve_3d, polyline или curve_replica, а кривые, имеющие базу, заданную другими кривыми, представляются таким же образом. Для объектов offset_curve_3d или curve_replica кривая, указанная как базовая (объект basis_curve), должна быть одного из вышеупомянутых типов.
WR6 - каждая вершина (объект vertex), определенная как начальная или конечная вершина для ребра (объект edge) в shell_based_wireframe_model, должна иметь тип vertex_point.
WR7 - объект vertex_geometry, который лежит в основе вершин, определяющих границы ребер (объектов edge) в замкнутой цепи (объект edge_loop) для shelI_based_wireframe_model, должен быть либо cartesian_point, либо point_replica, а объект point_replica должен воспроизводить либо другой объект point_replica, либо cartesian_point.
WR8 - вершина, которая определяет объект vertex_loop, используемый в качестве границы в shell_based_wireframe_model, должна иметь тип vertex_point.
WR9 - в основе вершины, которая определяет объект vertex_loop, используемый в качестве границы в shell_based_wireframe_model, должен лежать объект cartesian_point или point_replica, a объект point_replica должен воспроизводить либо другой объект point_replica, либо cartesian_point.
WR10 - вершина, которая определяет объект vertex_loop, используемый как vertex_shell_extent для vertex_shell в shell_based_wireframe_model, должна быть vertex_point.
WR11 - в основе вершины, которая определяет объект vertex_loop, используемый как vertex_shell_extent для объекта vertex_shell в shell_based_wireframe_model, должен лежать объект cartesian_point или point_replica, а объект point_replica должен воспроизводить либо другой объект point_replica, либо cartesian_point.
WR12 - если в объекте shell_based_wireframe_shape_representation имеется объект mapped_item, то источником объекта mapped_item должен быть объект shell_based_wireframe_shape_representation.
WR13 - значение параметра coordinate_space_dimension объекта shell_based_wireframe_shape_representation должно быть равно трем.
4.4 Определения функций схемы aic_shell_based_wireframe
4.4.1 Функция valid_wireframe_edge_curve проверяет, действительно ли заданная аргументом кривая является допустимой для использования в представлении формы, определенной топологически ограниченным каркасом.
EXPRESS-спецификация
*) FUNCTION valid_wireframe_edge_curve (crv: curve): BOOLEAN; | |||||||||
-- проверка на допустимость основных типов кривых IF SIZEOF (['AIC_SHELL_BASED_WIREFRAME.LINE', | |||||||||
'AIC_SHELL_BASED_WIREFRAME.CONIC', 'AIC_SHELL_BASED_WIREFRAME.B_SPLINE_CURVE', 'AIC_SHELL_BASED_WIREFRAME.POLYLINE']*TYPEOF (crv))=1 | |||||||||
THEN RETURN (TRUE); | |||||||||
ELSE -- рекурсивная проверка на допустимость основных кривых для типа curve_replica IF ('AIC_SHELL_BASED_WIREFRAME.CURVE_REPLICA') IN TYPEOF (crv) | |||||||||
THEN RETURN (valid_wireframe_edge_curve | |||||||||
(crv\curve_replica.parent_curve)); | |||||||||
ELSE | |||||||||
-- рекурсивная проверка на допустимость основных кривых для типа offset_curve IF('AIC_SHELL_BASED_WIREFRAME.OFFSET_CURVE_3D') IN TYPEOF (crv) | |||||||||
THEN RETURN (valid_wireframe_edge_curve | |||||||||
(crv\offset_curve_3d.basis_curve)); | |||||||||
END_IF; | |||||||||
END_IF; | |||||||||
END_IF; RETURN (FALSE); | |||||||||
END_FUNCTION; | |||||||||
(* | |||||||||
Определение аргумента
crv - заданная кривая, которая должна быть проверена на допустимость. Допустимой кривой является кривая типов line, conic, b_spline_curve, offset_curve_3d, polyline или curve_replica. Если кривая имеет тип offset_curve_3d или curve_replica, то кривая, на которую дается ссылка как на базовую (basis_curve) или порождающую (parent_curve), также должна быть допустимой кривой.
4.4.2 Функция valid_wireframe_vertex_point проверяет, действительно ли заданная аргументом точка является допустимой для использования в представлении формы, определенной топологически ограниченным каркасом.
EXPRESS спецификация
*) FUNCTION valid_wireframe_vertex_point (pnt: point): BOOLEAN; | ||||||
-- проверка на допустимость основных типов точек IF ('AIC_SHELL_BASED_WIREFRAME.CARTESIAN_POINT') IN TYPEOF (pnt) | ||||||
THEN RETURN (TRUE); | ||||||
ELSE -- рекурсивная проверка на допустимость основных типов точек как порождающих для -- типа point_replica IF ('AIC_SHELL_BASED_WIREFRAME.POINT_REPLICA') IN TYPEOF (pnt) | ||||||
THEN RETURN (valid_wireframe_vertex_point | ||||||
(pnt\point_replica.parent_pt)); | ||||||
END_IF; | ||||||
END_IF; RETURN (FALSE); | ||||||
END_FUNCTION; | ||||||
(* | ||||||
Определение аргумента
pnt - заданная точка, которая должна быть проверена на допустимость. Допустимой точкой является точка типа либо cartesian_point, либо point_replica. Если точка имеет тип point_replica, то порождающая точка (parent_point) также должна быть допустимой точкой.
*)
END_SCHEMA;
(*
Приложение А
(обязательное)
Сокращенное наименование объекта
Сокращенное наименование объекта, установленного в настоящем стандарте, приведено в таблице А.1. Требования к использованию сокращенных наименований содержатся в методах реализации, описанных в соответствующих стандартах комплекса ИСО 10303.
Таблица А.1 - Сокращенное наименование объекта
Полное наименование объекта | Сокращенное наименование |
SHELL_BASED_WIREFRAME_SHAPE_REPRESENTATION | SBWSR |
Приложение В
(обязательное)
Регистрация информационного объекта
B.1 Обозначение документа
Для обеспечения однозначного обозначения информационного объекта в открытой системе настоящему стандарту присвоен следующий идентификатор объекта:
{ iso standard 10303 part(502) version(1) }
Смысл данного обозначения установлен в ИСО/МЭК 8824-1 и описан в ИСО 10303-1.
B.2 Обозначение схемы
Для обеспечения однозначного обозначения в открытой системе схеме aic_shell_based_wireframe_schema (см. раздел 4) присвоен следующий идентификатор объекта:
{ iso standard 10303 part(502) version(1) object(1) aic-shell-based-wireframe-schema(1) }
Смысл данного обозначения установлен в ИСО/МЭК 8824-1 и описан в ИСО 10303-1.
Приложение С
(справочное)
EXPRESS-G диаграммы
EXPRESS диаграммы, представленные на рисунках С.1-С.6, получены из сокращенного листинга, представленного в разделе 4, с использованием спецификаций интерфейса стандарта ИСО 10303-11. В диаграммах использована графическая нотация EXPRESS-G языка EXPRESS. Описание EXPRESS-G установлено в ИСО 10303-11, приложение D.
Примечание - Выбранные типы geometric_set_select, transformation, trimming_select, reversible_topology, vector_or_direction и wireframe_select импортируются в расширенный листинг ПИК в соответствии с правилами неявных интерфейсов по ИСО 10303-11. В настоящем стандарте другие объекты не ссылаются на эти выбранные типы.
|
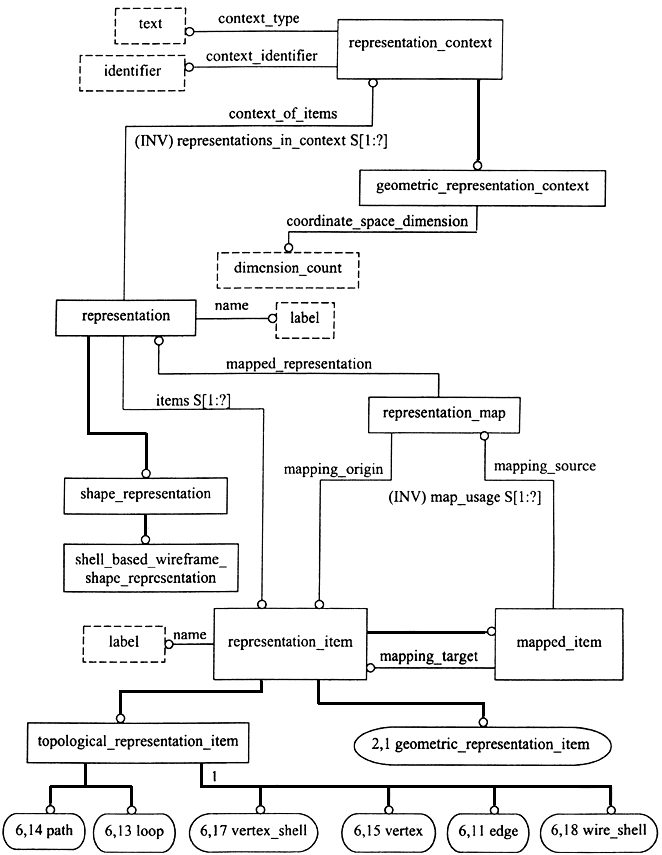
Рисунок С.1 - aic_shell_based_wireframe - EXPRESS-G диаграмма 1 из 6
|
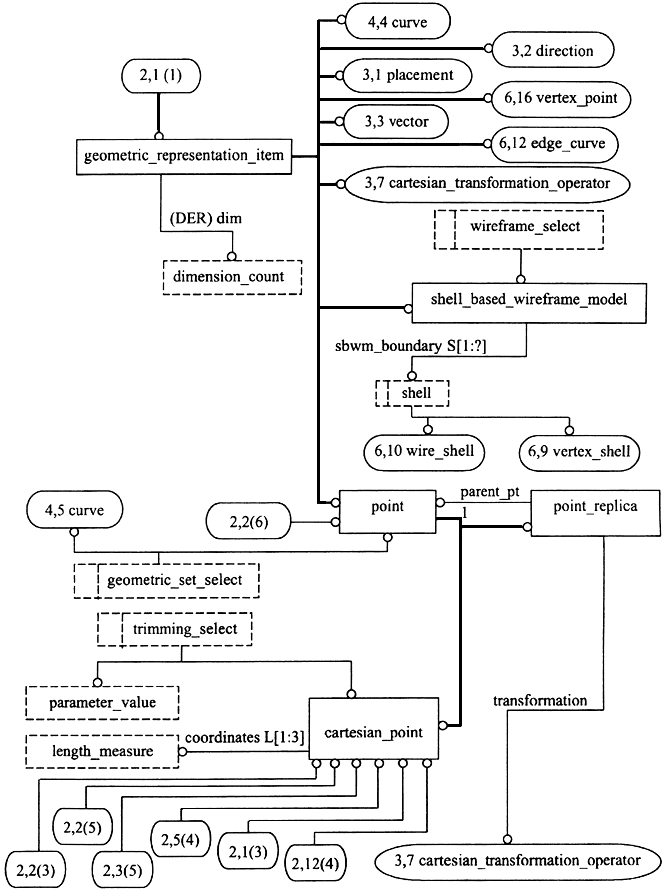
Рисунок С.2 - aic_shell_based_wireframe - EXPRESS-G диаграмма 2 из 6
|

Рисунок С.3 - aic_shell_based_wireframe - EXPRESS-G диаграмма 3 из 6
|
 .
.
Рисунок С.4 - aic_shell_based_wireframe - EXPRESS-G диаграмма 4 из 6
|
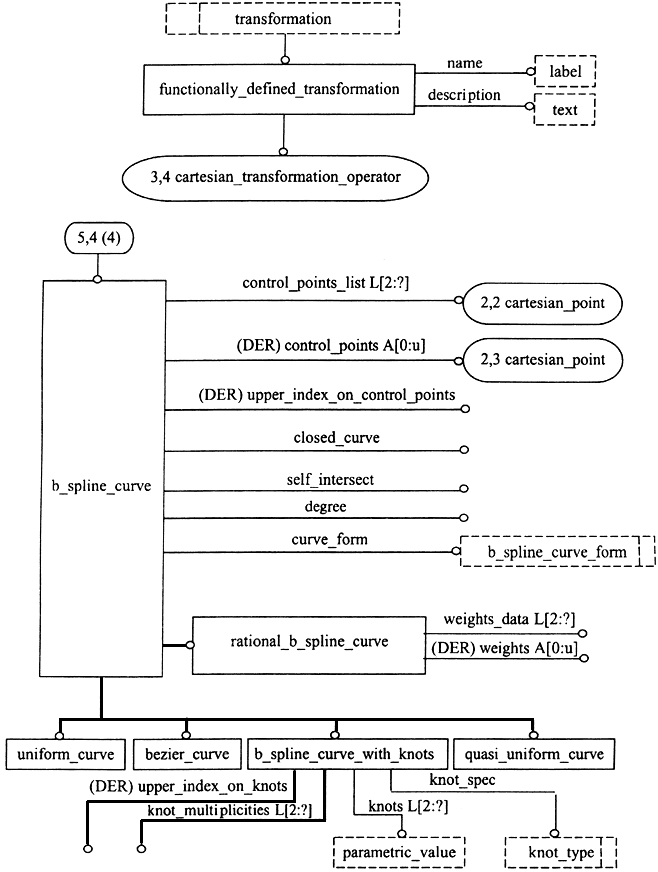
Рисунок С.5 - aic_shell_based_wireframe - EXPRESS-G диаграмма 5 из 6
|
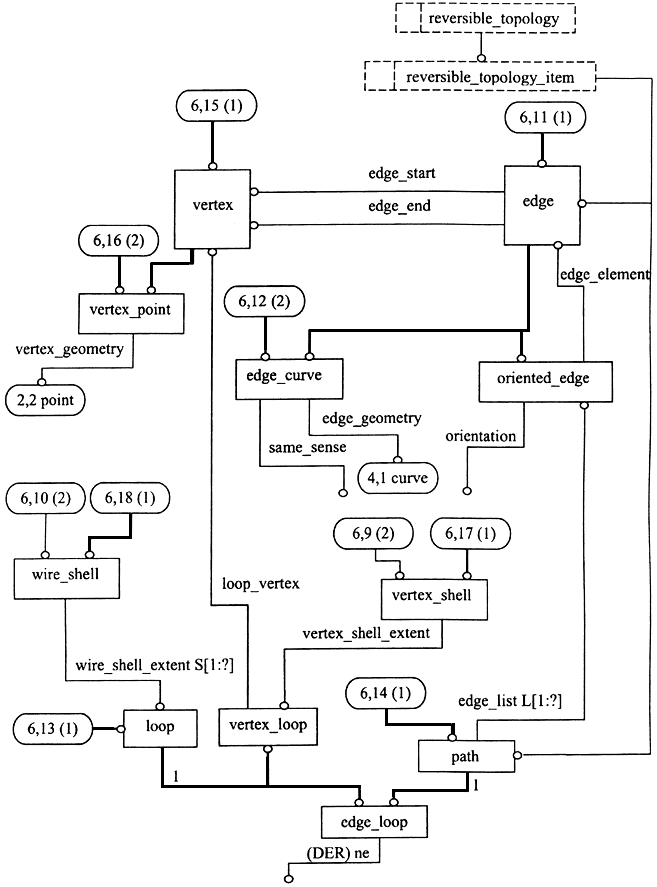
Рисунок С.6 - aic_shell_based_wireframe - EXPRESS-G диаграмма 6 из 6
Приложение D
(справочное)
Машинно-интерпретируемые листинги
В данном приложении приведены ссылки на сайты, на которых находятся листинги наименований объектов на языке EXPRESS и соответствующих сокращенных наименований, установленных в настоящем стандарте. На этих же сайтах находятся листинги всех EXPRESS-схем, установленных в настоящем стандарте без комментариев и другого поясняющего текста. Эти листинги доступны в машинно-интерпретируемой форме и могут быть получены по следующим адресам URL:
Сокращенные наименования: http://www.mel.nist.gov/div826/subject/apde/snr/
EXPRESS: http://www.mel.nist.gov/step/parts/part501/is/
При невозможности доступа к этим сайтам необходимо обратиться в центральный секретариат ИСО или непосредственно в секретариат ИСО ТК184/ПК4 по адресу электронной почты: sc4sec@cme.nist.gov.
Примечание - Информация, представленная в машинно-интерпретированном виде на указанных выше URL, является справочной. Обязательным является текст настоящего стандарта.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO/IEC 8824-1:1995 | - | * |
ISO 10303-1:1994 | IDT | ГОСТ Р ИСО 10303-1-99 "Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 1. Общие представления и основополагающие принципы" |
ISO 10303-11:1994 | IDT | ГОСТ Р ИСО 10303-11-2000 "Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 11. Методы описания. Справочное руководство по языку EXPRESS" |
ISO 10303-41:1994 | IDT | ГОСТ Р ИСО 10303-41-99 "Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 41. Интегрированные обобщенные ресурсы. Основы описания и поддержки изделий" |
ISO 10303-42:1994 | - | * |
ISO 10303-43:1994 | - | * |
ISO 10303-202:1996 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
____________________
Действует ГОСТ Р ИСО 10303-11-2009.
УДК 656.072:681.3:006.354 | ОКС 25.040.40 | |
Ключевые слова: автоматизация, средства автоматизации, прикладные автоматизированные системы, промышленные изделия, данные, представление данных, обмен данными, прикладные конструкции, формы, каркасное представление, оболочки | ||
Электронный текст документа
и сверен по:
, 2020
{kind=link}