ГОСТ Р МЭК 62714-2-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФОРМАТ ОБМЕНА ИНЖЕНЕРНЫМИ ДАННЫМИ ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМАХ ПРОМЫШЛЕННОЙ АВТОМАТИЗАЦИИ
Стандартизированный формат обмена данными AutomationML
Часть 2
Библиотеки ролевых классов
Engineering data exchange format for use in industrial automation systems engineering. Automation markup language. Part 2. Role class libraries
ОКС 25.040.40
35.060
35.240.50
Дата введения 2021-01-01
Предисловие
1 ПОДГОТОВЛЕН ООО "НИИ экономики связи и информатики "Интерэкомс" (ООО "НИИ "Интерэкомс") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 100 "Стратегический и инновационный менеджмент"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 сентября 2020 г. N 700-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 62714-2:2015* "Формат обмена инженерными данными для использования в системах промышленной автоматизации. Стандартизированный формат обмена данными AutomationML. Часть 2. Библиотеки ролевых классов" (IEC 62714-2:2015 "Engineering data exchange format for use in industrial automation systems engineering - Automation markup language - Part 2: Role class libraries", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Формат обмена данными, определенный в МЭК 62714 (язык разметки автоматизации AutomationML), - это формат обмена данными, основанный на XML-языке. Он разработан для обеспечения возможности обмена данными между различными инструментальными приложениями. В МЭК 62714-1 устанавливаются основные положения данного формата обмена данными.
Цель языка AutomationML состоит в обеспечении взаимосвязи множества инструментальных средств инженерии в различных областях: проектирование механизированного оборудования, электротехническое проектирование, проектирование и управление производственными процессами, разработка человеко-машинного интерфейса (HMI), программирование логического контроллера (PLC), программирование роботов и т.д.
Язык AutomationML также предназначен для хранения инженерной информации в соответствии с объектно ориентированной парадигмой, что позволяет моделировать физические и логические компоненты производственных объектов как объекты данных, инкапсулирующие различные аспекты. Указанные объекты могут состоять из вложенных объектов (подобъектов), которые сами могут являться частью композиции или агрегации. Типовые объекты автоматизированных установок включают в себя информацию о топологии, геометрии, кинематике и логике. При этом логика учитывает последовательность/упорядоченность, а также поведенческие и управленческие аспекты. Таким образом, целью обмена данными в инженерном домене является обмен объектно ориентированными структурами данных топологии, геометрии, кинематики и логики.
Язык AutomationML комбинирует существующие промышленные форматы данных, используемые для хранения и обмена различными аспектами инженерной информации. Указанные форматы данных используются "как есть" в рамках их собственных спецификаций вне зависимости от применения языка AutomationML.
Ядром языка AutomationML является формат данных верхнего уровня CAEX. Он соединяет различные форматы данных. Таким образом, язык AutomationML имеет унаследованную распределенную архитектуру документов.
Рисунок 1 иллюстрирует базовую архитектуру языка AutomationML, а также распределение информации о топологии, геометрии, кинематике и логике.
|

Рисунок 1 - Обзор формата обмена инженерными данными - языка AutomationML
Комплекс стандартов МЭК 62714 состоит из нескольких частей, распространяющихся на различные аспекты языка AutomationML:
- МЭК 62714-1: Архитектура и общие требования.
Данный стандарт устанавливает общую архитектуру языка AutomationML, порядок моделирования инженерных данных, классы, экземпляры, соотношения, ссылки, иерархии, базовые библиотеки AutomationML, расширенные понятия AutomationML. Данный стандарт является базой для всех последующих частей, устанавливает ссылочные механизмы на прочие второстепенные форматы;
- МЭК 62714-2: Библиотека ролевых классов.
Данный стандарт содержит описание дополнительных библиотек AutomationML;
- МЭК 62714-3: Геометрия и кинематика.
Данный стандарт устанавливает процедуру моделирования информации о геометрии и кинематике.
Кроме того, другие части, например МЭК 62714-4, будут содержать описание методики моделирования логики, упорядочивания, поведения и информации, относящейся к управлению.
В будущем допустимо добавление новых частей для обеспечения взаимосвязи других стандартов данных с языком AutomationML.
Раздел 5 содержит описание нормативной библиотеки ролевых классов языка AutomationML.
Приложение А содержит описание справочной расширенной библиотеки ролевых классов AutomationML.
Приложение B содержит пример применения ролевых классов AutomationML.
Приложение C описывает некоторые пользовательские библиотеки ролевых классов различного происхождения.
Приложение D содержит представление библиотек, определенных в настоящем стандарте, на языке XML.
1 Область применения
Комплекс стандартов МЭК 62714 устанавливает формат обмена инженерными данными для использования в системах промышленной автоматизации.
Настоящий стандарт содержит описание справочных библиотек ролевых классов AutomationML, необходимых для моделирования инженерной информации и предназначенных для обмена данными между различными приложениями для решения задач промышленной автоматизации с помощью языка AutomationML. Также в качестве примера в настоящем стандарте приведены дополнительные пользовательские библиотеки. Положения настоящего стандарта распространяются на приложения, которые обеспечивают функции экспорта/импорта систем промышленной автоматизации.
Настоящий стандарт не содержит подробных описаний процедуры обмена данными и требований к практической реализации рассматриваемых инструментов импорта/экспорта.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
IEC 62714-1:2014, Engineering data exchange format for use in industrial automation systems engineering - Automation markup language - Part 1: Architecture and general requirements (Формат обмена инженерными данными для использования в системах промышленной автоматизации. Стандартизированный формат обмена данными AutomationML. Часть 1. Архитектура и общие требования)
3 Термины, определения и сокращения
3.1 Термины и определения
В настоящем стандарте применены термины по МЭК 62714-1, а также следующие термины с соответствующими определениями:
3.1.1 робот; промышленный робот (robot; industrial robot): Автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем и более осям, который либо может быть зафиксирован на месте, либо может передвигаться (используется в системах промышленной автоматизации).
[ИСО 8373:2012, определение 2.9]
3.1.2 сенсор (sensor): Устройство, обнаруживающее и фиксирующее объекты (препятствия) внутри некоторого диапазона мониторинга, находящееся под влиянием измеряемой величины, выдающее электрический сигнал (данные), характеризующий обнаруженный объект (измеряемую величину).
Пример - Концевой выключатель, сенсор ближней локации, измерительный преобразователь давления, преобразователь вибрации, тензодатчик, фотодетектор.
3.1.3 измеряемая величина (measurand): Конкретная количественная величина, подлежащая измерению.
[МЭК 60050-311:2001, определение 311-01-03]
3.1.4 исполнительное устройство, орган управления (actuator): Функциональная единица, генерирующая манипулируемую величину, необходимую для приведения в действие выходного управляющего элемента, из выходной переменной управляющего элемента.
Пример - Контактор, привод переменной скорости.
[МЭК 60050-351:2013, определение 351-49-07]
3.2 Сокращения
В настоящем стандарте использованы сокращения по МЭК 62714-1, а также сокращения, приведенные в таблице 1.
Таблица 1 - Сокращения
AGV | Транспортное средство с автоматическим управлением (Automated guided vehicle) |
IPC | Промышленная персональная ЭВМ (Industrial PC) |
NC | Устройство числового программного управления (Numerical controller) |
РАС | Программируемый контроллер автоматизации (Programmable automation controller) |
PC | Персональный компьютер (Personal computer) |
RC | Устройство управления роботом (Robot controller) |
4 Соответствие настоящему стандарту
Для обеспечения соответствия требованиям настоящего стандарта в части поддержания языка AutomationML необходимо выполнение требований, содержащихся в разделе 5.
5 Ролевые классы языка AutomationML
5.1 Структура и ссылки
Обзор библиотек ролевых классов AutomationML, описанных в МЭК 62714-1 и в настоящем стандарте, приведен в таблице 2.
Таблица 2 - Структура библиотек ролевых классов AutomationML
AutomationMLBaseRoleClassLib | МЭК 62714-1, нормативная |
AutomationMLDMIRoleClassLib | |
AutomationMLCMIRoleClassLib | |
AutomationMLBMIRoleClassLib | |
AutomationMLCSRoleClassLib | |
AutomationMLExtendedRoleClassLib | МЭК 62714-2, справочная |
UserDefinedRoleClassLib_RedBookVDMA | |
UserDefinedRoleClassLibCompanySpecificStructure | |
UserDefinedRoleClassLib_FoodAndBeverage | |
UserDefinedRoleClassLibPandixPCE | |
UserDefinedRoleClassLibPandixPPE |
Примечание 1 - Понятие библиотеки ролевых классов, особенно пользовательской библиотеки ролевых классов, описано в МЭК 62424 и МЭК 62714-1, подраздел 7.4.
Примечание 2 - Дерево ролевого класса (см. рисунок 2) не обязательно должно отражать соотношения наследования между классами, оно улучшает читаемость. Соответствующее соотношение наследования описывается классом в фигурных скобках.
Все библиотеки ролевых классов, определенные в настоящем стандарте, основаны на рассмотрении библиотеки базового ролевого класса AutomationMLBaseRoleClassLib, определенной в МЭК 62714-1 (см. рисунок 2).
|

Рисунок 2 - Библиотека базового ролевого класса AutomationMLBaseRoleClassLib, определенная в МЭК 62714-1
Подраздел 5.2 определяет нормативную библиотеку ролевого класса AutomationML дискретного промышленного производства (AutomationMLDMIRoleClassLib).
Примечание 3 - Термины "дискретное промышленное производство", "непрерывное промышленное производство", "серийное промышленное производство" используются в соответствии с МЭК 62264-1.
Подраздел 5.3 определяет нормативную библиотеку ролевого класса AutomationML непрерывного промышленного производства (AutomationMLCMIRoleClassLib).
Подраздел 5.4 определяет нормативную библиотеку ролевого класса AutomationML серийного промышленного производства (AutomationMLBMIRoleClassLib).
Подраздел 5.5 определяет нормативную библиотеку ролевого класса AutomationML системы управления (AutomationMLCSRoleClassLib).
Приложение A описывает справочную расширенную библиотеку ролевого класса AutomationML (AutomationMLExtendedRoleClassLib).
Приложение B содержит пример применения ролевого класса AutomationML.
Приложение C содержит примеры пользовательских библиотек ролевого класса.
В соответствии с МЭК 62714-1 версия AutomationML определяется элементом "AdditionalInformation" (дополнительная информация) формата CAEX в качестве дочернего корневого элемента CAEXFile. В настоящем стандарте используется версия языка AutomationML "2.0". Кроме того, каждая библиотека ролевого класса содержит версию индивидуальной библиотеки, определяемую элементом "Version" (Версия) формата CAEX для элемента библиотеки "RoleClassLib".
Ролевые классы в языке AutomationML имеют атрибуты в соответствии с МЭК 62424. Определение атрибута должно находиться в элементе "Description" (описание) формата CAEX. Атрибуты определяются путем:
1) ссылки на словарь компонентов данных (Component data dictionary), см. МЭК 61360-4-DB;
2) ссылки на существующие стандарты МЭК или
3) рассмотрения пользовательских текстовых пояснений.
5.2 Библиотека ролевого класса дискретного промышленного производства AutomationMLDMIRoleClassLib
5.2.1 Общие положения
Примечание 1 - В настоящем стандарте используется версия "2.4.0" библиотеки ролевых классов AutomationML дискретного промышленного производства.
Нормативная библиотека AutomationMLDMIRoleClassLib в виде дерева объектов представлена на рисунках 3-5. Данная библиотека содержит набор базовых ролевых классов дискретного промышленного производства. Подробности для каждого ролевого класса приведены в 5.2.2-5.2.11.
Примечание 2 - В соответствии с МЭК 62424 также допустимо добавление пользовательских атрибутов.
|

Рисунок 3 - Библиотека ролевого класса дискретного промышленного производства AutomationMLDMIRoleClassLib
|
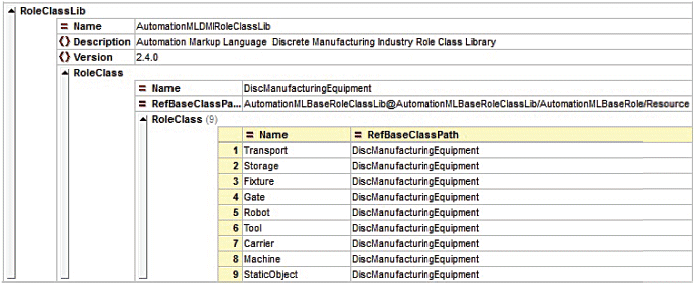
Рисунок 4 - Табличное представление библиотеки AutomationMLDMIRoleClassLib
|
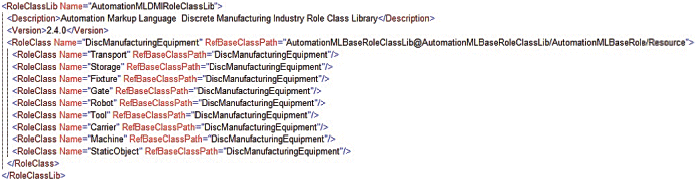
Рисунок 5 - Описание библиотеки AutomationMLDMIRoleClassLib на языке XML
5.2.2 Ролевой класс оборудования для производства дисков "RoleClass DiscManufacturingEquipment"
Описание ролевого класса "DiscManufacturingEquipment" приведено в таблице 3.
Таблица 3 - Ролевой класс оборудования для производства дисков RoleClass DiscManufacturingEquipment
Имя класса | DiscManufacturingEquipment |
Описание | Ролевой класс "DiscManufacturingEquipment" используется для оборудования, относящегося к дискретному промышленному производству |
Родительский класс | Путь доступа: AutomationMLBaseRoleClassLib/AutomationMLBaseRole/Resource |
5.2.3 Ролевой класс RoleClass "Transport"
Описание ролевого класса "Transport" (транспорт) приведено в таблице 4.
Таблица 4 - Ролевой класс RoleClass Transport
Имя класса | Transport |
Описание | Ролевой класс "Transport" используется для описания оборудования транспортирования изделий |
Родительский класс | Путь доступа: AutomationMLDMIRoleClassLib/DiscManufacturingEquipment |
Пример - Конвейер, поворотный стол, лифт (подъемное устройство), AGV (транспортное средство с автоматическим управлением), ленточный конвейер, барабанный конвейер, поворотная башня, подъемный стол, кран.
5.2.4 Ролевой класс RoleClass "Storage"
Описание ролевого класса "Storage" (хранение) приведено в таблице 5.
Таблица 5 - Ролевой класс RoleClass Storage
Имя класса | Storage |
Описание | Ролевой класс "Storage" используется для описания оборудования, используемого для промежуточного временного хранения продуктов (материалов) на производстве. Он может быть также использован для импорта продуктов (материалов) в производственный процесс или для экспорта продуктов (материалов) из производственного процесса |
Родительский класс | Путь доступа: AutomationMLDMIRoleClassLib/DiscManufacturingEquipment |
Пример - Буфер промежуточного хранения, LCA (автоматизация с использованием малозатратных средств).
5.2.5 Ролевой класс RoleClass "Fixture"
Описание ролевого класса "Fixture" (крепление) приведено в таблице 6.
Таблица 6 - Ролевой класс RoleClass Fixture
Имя класса | Fixture |
Описание | Ролевой класс "Fixture" используется для описания оборудования, уменьшающего число степеней свободы изделия |
Родительский класс | Путь доступа: |
Пример - Элемент крепления, захват, ограничение.
5.2.6 Ролевой класс RoleClass "Gate"
Описание ролевого класса "Gate" (шлюз) приведено в таблице 7.
Таблица 7 - Ролевой класс RoleClass Gate
Имя класса | Gate |
Описание | Ролевой класс "Gate" используется для описания оборудования, блокирующего (отслеживающего) входные, выходные и транзитные потоки |
Родительский класс | Путь доступа: |
Пример - Дверь безопасности, оборудование, отслеживающее транзит (управляющее транзитом) изделий.
5.2.7 Ролевой класс RoleClass "Robot"
Описание ролевого класса "Robot" (робот) приведено в таблице 8.
Таблица 8 - Ролевой класс RoleClass Robot
Имя класса | Robot |
Описание | Ролевой класс "Robot" должен быть использован для роботов |
Родительский класс | Путь доступа: |
5.2.8 Ролевой класс RoleClass "Tools"
Описание ролевого класса "Tools" (инструменты) приведено в таблице 9.
Таблица 9 - Ролевой класс RoleClass Tools
Имя класса | Tools |
Описание | Ролевой класс "Tools" необходим для описания оборудования, используемого совместно с ресурсами для изготовления продукта |
Родительский класс | Путь доступа: |
Пример - Инструмент манипулирования, инструмент управления, инструмент обеспечения непроницаемости, сборочный инструмент, стамеска, сварочный пистолет, фрезерный инструмент.
5.2.9 Ролевой класс RoleClass "Carrier"
Описание ролевого класса "Carrier" (носитель) приведено в таблице 10.
Таблица 10 - Ролевой класс RoleClass Carrier
Имя класса | Carrier |
Описание | Ролевой класс "Carrier" используется для описания транспортного оборудования, которое перемещает изделия из одного положения в другое |
Родительский класс | Путь доступа: |
Пример - Поддон, контейнер, устройство погрузки-разгрузки, полоз.
5.2.10 Ролевой класс RoleClass "Machine"
Описание ролевого класса "Machine" (станок) приведено в таблице 11.
Таблица 11 - Ролевой класс RoleClass Machine
Имя класса | Machine |
Описание | Ролевой класс "Machine" используется для описания механического (мехатронного) оборудования, создающего добавочную стоимость продуктов и разработанного для выполнения особых производственных заданий |
Родительский класс | Путь доступа: |
Пример - Фрезерный станок, сварочный станок, шлифовальный станок.
5.2.11 Ролевой класс RoleClass "StaticObject"
Описание ролевого класса "StaticObject" (статический объект) приведено в таблице 12.
Таблица 12 - Ролевой класс RoleClass StaticObject
Имя класса | StaticObject |
Описание | Ролевой класс "StaticObject" используется для описания пассивных статических объектов, позиционируемых в производственной среде |
Родительский класс | Путь доступа: |
Пример - Ограждение, косяк (двери).
5.3 Библиотека ролевого класса непрерывного промышленного производства AutomationMLCMIRoleClassLib
5.3.1 Общие положения
Примечание 1 - В настоящем стандарте используется версия "1.1.0" библиотеки ролевых классов AutomationML непрерывного промышленного производства.
Нормативная библиотека AutomationMLCMIRoleClassLib в виде дерева объектов представлена на рисунках 6-8. Ролевой класс непрерывного промышленного производства выводится напрямую или косвенно из элементов данной библиотеки.
Примечание 2 - Допустимо добавление пользовательских атрибутов.
|
Рисунок 6 - Библиотека ролевых классов AutomationML непрерывного промышленного производства AutomationMLCMIRoleClassLib
|

Рисунок 7 - Табличное представление библиотеки ролевых классов AutomationMLCMIRoleClassLib
|

Рисунок 8 - Описание библиотеки AutomationMLCMIRoleClassLib на языке XML
5.3.2 Ролевой класс RoleClass непрерывного промышленного оборудования ContManufacturingEquipment
Описание ролевого класса "ContManufacturingEquipment" приведено в таблице 13.
Таблица 13 - Ролевой класс RoleClass ContManufacturingEquipment
Имя класса | ContManufacturingEquipment |
Описание | Ролевой класс "ContManufacturingEquipment" используется для описания оборудования, относящегося к непрерывному производству |
Родительский класс | Путь доступа: |
5.4 Библиотека ролевого класса серийного промышленного производства AutomationMLBMIRoleClassLib
5.4.1 Общие положения
Примечание 1 - В настоящем стандарте используется версия "1.1.0" библиотеки ролевых классов AutomationML серийного промышленного производства.
Нормативная библиотека ролевых классов AutomationMLBMIRoleClassLib в виде дерева объектов представлена на рисунках 9-11. Ролевой класс серийного промышленного производства выводится прямо или косвенно из элементов данной библиотеки.
Примечание 2 - Допустимо добавление пользовательских атрибутов.
|

Рисунок 9 - Библиотека ролевого класса серийного промышленного производства AutomationMLBMIRoleClassLib
|

Рисунок 10 - Табличное представление библиотеки ролевых классов серийного промышленного производства AutomationMLBMIRoleClassLib
|

Рисунок 11 - Описание на языке XML библиотеки ролевых классов AutomationMLBMIRoleClassLib
5.4.2 Ролевой класс RoleClass "BatchManufacturingEquipment"
Описание ролевого класса "BatchManufacturingEquipment" (оборудование серийного производства) приведено в таблице 14.
Таблица 14 - Ролевой класс RoleClass BatchManufacturingEquipment
Имя класса | BatchManufacturingEquipment |
Описание | Ролевой класс "BatchManufacturingEquipment" оборудования, относящегося к серийному производству |
Родительский класс | Путь доступа: |
5.5 Библиотека ролевого класса систем управления AutomationMLCSRoleClassLib
5.5.1 Общие положения
Примечание 1 - В настоящем стандарте используется версия "2.3.0" ролевого класса AutomationML системы управления.
Библиотека ролевого класса системы управления AutomationMLCSRoleClassLib в виде дерева объектов, табличного представления и описания на языке XML представлена на рисунках 12-14. Подробности по каждому ролевому классу приведены в 5.5.2-5.5.15.
Примечание 2 - Допустимо добавление пользовательских атрибутов.
|
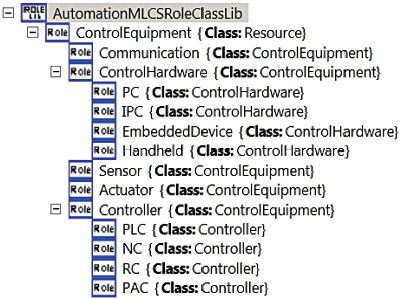
Рисунок 12 - Библиотека ролевого класса системы управления AutomationMLCSRoleClassLib
|

Рисунок 13 - Табличное представление библиотеки ролевых классов системы управления AutomationMLCSRoleClassLib
|

Рисунок 14 - Описание библиотеки ролевых классов системы управления AutomationMLCSRoleClassLib на языке XML
5.5.2 Ролевой класс RoleClass "ControlEquipment"
Описание ролевого класса "ControlEquipment" (оборудование системы управления) приведено в таблице 15.
Таблица 15 - Ролевой класс RoleClass ControlEquipment
Имя класса | ControlEquipment |
Описание | Ролевой класс "ControlEquipment" оборудования, относящегося к системе управления. Ролевой класс "ControlEquipment" может использоваться в любой отрасли промышленности |
Родительский класс | Путь доступа: |
5.5.3 Ролевой класс RoleClass "Communication"
Описание ролевого класса "Communication" (коммуникация) приведено в таблице 16.
Таблица 16 - Ролевой класс RoleClass Communication
Имя класса | Communication |
Описание | Ролевой класс "Communication" используется для описания изделий, связанных с коммуникацией |
Родительский класс | Путь доступа: |
5.5.4 Ролевой класс RoleClass "ControlHardware"
Описание ролевого класса "ControlHardware" (аппаратура системы управления) приведено в таблице 17.
Таблица 17 - Ролевой класс RoleClass ControlHardware
Имя класса | ControlHardware |
Описание | Ролевой класс "ControlHardware" используется для аппаратуры, обеспечивающей требуемые условия производства |
Родительский класс | Путь доступа: |
5.5.5 Ролевой класс RoleClass "PC"
Описание ролевого класса "PC" (персональный компьютер) приведено в таблице 18.
Таблица 18 - Ролевой класс RoleClass PC
Имя класса | PC |
Описание | Ролевой класс "PC" используется для описания любого компьютера общего назначения, обеспечивающего необходимые внешние условия эксплуатации установленного на нем программного обеспечения |
Родительский класс | Путь доступа: |
5.5.6 Ролевой класс RoleClass "IPC"
Описание ролевого класса "IPC" (промышленная персональная ЭВМ) приведено в таблице 19.
Таблица 19 - Ролевой класс RoleClass IPC
Имя класса | IPC |
Описание | Ролевой класс "IPC" используется для промышленных приложений любой вычислительной платформой, обеспечивающей необходимые внешние условия эксплуатации установленного на ней программного обеспечения |
Родительский класс | Путь доступа: |
5.5.7 Ролевой класс RoleClass "Handheld"
Описание ролевого класса "Handheld" (переносное устройство) приведено в таблице 20.
Таблица 20 - Ролевой класс RoleClass Handheld
Имя класса | Handheld |
Описание | Ролевой класс "Handheld" используется для описания любого переносного, программируемого, электронного устройства с собственным источником питания для конкретных приложений |
Родительский класс | Путь доступа: |
5.5.8 Ролевой класс RoleClass "EmbeddedDevice"
Описание ролевого класса "EmbeddedDevice" (встроенное устройство) приведено в таблице 21.
Таблица 21 - Ролевой класс RoleClass EmbeddedDevice
Имя класса | EmbeddedDevice |
Описание | Ролевой класс "EmbeddedDevice" используется для описания любого устройства, выполняющего одну или несколько функций программного обеспечения. Оно встроено в другое устройство, включая аппаратуру и механические детали |
Родительский класс | Путь доступа: |
5.5.9 Ролевой класс RoleClass "Sensor"
Описание ролевого класса "Sensor" (сенсор) приведено в таблице 22.
Таблица 22 - Ролевой класс RoleClass Sensor
Имя класса | Sensor |
Описание | Ролевой класс "Sensor" используется для описания датчиков |
Родительский класс | Путь доступа: |
5.5.10 Ролевой класс RoleClass "Actuator"
Описание ролевого класса "Actuator" (исполнительное устройство) приведено в таблице 23.
Таблица 23 - Ролевой класс RoleClass Actuator
Имя класса | Actuator |
Описание | Ролевой класс "Actuator" используется для описания исполнительных устройств |
Родительский класс | Путь доступа: |
5.5.11 Ролевой класс RoleClass "Controller"
Описание ролевого класса "Controller" (контроллер) приведено в таблице 24.
Таблица 24 - Ролевой класс RoleClass Controller
Имя класса | Controller |
Описание | Ролевой класс "Controller" используется для описания автономных устройств, генерирующих сигналы в соответствии с предварительно определенной логикой. Данные устройства генерируют выходной сигнал для обеспечения требуемого поведения системы |
Родительский класс | Путь доступа: |
Примечание - Автономные устройства контроллеров могут быть как программным обеспечением, так и аппаратными средствами. | |
5.5.12 Ролевой класс RoleClass "PLC"
Описание ролевого класса "PLC" (программируемый логический контроллер) приведено в таблице 25.
Таблица 25 - Ролевой класс RoleClass PLC
Имя класса | PLC |
Описание | Ролевой класс "PLC" используется для описания программируемых функциональных возможностей управления обработкой сигнала |
Родительский класс | Путь доступа: |
Примечание - Функциональные возможности PLC реализуются как программным обеспечением, так и аппаратными средствами. | |
5.5.13 Ролевой класс RoleClass "NC"
Описание ролевого класса "NC" (устройство числового программного управления) приведено в таблице 26.
Таблица 26 - Ролевой класс RoleClass NC
Имя класса | NC |
Описание | Ролевой класс "NC" используется для описания программируемых функциональных возможностей управления обработкой числовых сигналов |
Родительский класс | Путь доступа: |
Примечание - Функциональные возможности NC реализуются как программным обеспечением, так и аппаратными средствами. | |
5.5.14 Ролевой класс RoleClass "RC"
Описание ролевого класса "RC" (устройство управления роботом) приведено в таблице 27.
Таблица 27 - Ролевой класс RoleClass RC
Имя класса | RC |
Описание | Ролевой класс "RC" используется для описания программируемых функциональных возможностей управления роботами (обеспечение требуемого поведения кинематических систем самих роботов и соответствующих присоединенных периферийных устройств) |
Родительский класс | Путь доступа: |
Примечание - Функциональные возможности RC реализуются как программным обеспечением, так и аппаратными средствами. | |
5.5.15 Ролевой класс RoleClass "PAC"
Описание ролевого класса "PAC" (программируемый контроллер автоматизации) приведено в таблице 28.
Таблица 28 - Ролевой класс RoleClass PAC
Имя класса | РАС |
Описание | Ролевой класс "PAC" используется для программируемых функциональных возможностей автоматизации, ориентированных на междоменные функциональные возможности, такие как бинарное управление, управление движением и непрерывное управление |
Родительский класс | Путь доступа: |
Примечание - Функциональные возможности программируемого контроллера автоматизации PAC реализуются как программным обеспечением, так и аппаратными средствами. | |
Приложение A
(справочное)
Расширенная библиотека ролевых классов AutomationML
A.1 Общие положения
Расширенная библиотека ролевых классов AutomationMLExtendedRoleClassLibrary - это рекомендуемое расширение библиотеки базового ролевого класса AutomationMLBaseRoleClassLib и библиотеки ролевых классов дискретного промышленного производства AutomationMLDMIRoleClassLib. Она охватывает широкую область типовых ролей дискретного промышленного производства.
Рассматриваемая расширенная библиотека AutomationMLExtendedRoleClassLib в виде дерева объектов представлена на рисунке A.1.
Примечание 1 - В настоящем стандарте используется версия "2.7.0" расширенной библиотеки ролевых классов AutomationML.
Примечание 2 - В соответствии с МЭК 62424 допускается добавление пользовательских атрибутов.
|

Рисунок A.1 - Расширенная библиотека ролевых классов AutomationMLExtendedRoleClassLib
A.2 Ролевой класс RoleClass "PLCFacet"
Описание ролевого класса "PLCFacet" (фасет программируемого логического контроллера) приведено в таблице A.1.
Таблица A.1 - Ролевой класс RoleClass PLCFacet
Имя класса | PLCFacet |
Описание | Ролевой класс "PLCFacet" используется для моделирования отдельных представлений всего, что имеет отношение к использованию генераторов кодов управления PLC: в представлениях PLC для объектов AutomationML указывается информация о PLC |
Родительский класс | Путь доступа: |
A.3 Ролевой класс RoleClass "HMIFacet"
Описание ролевого класса "HMIFacet" (фасет человеко-машинного интерфейса) приведено в таблице A.2.
Таблица A.2 - Ролевой класс RoleClass HMIFacet
Имя класса | HMIFacet |
Описания | Ролевой класс "HMIFacet" используется для моделирования отдельных представлений всего, что имеет отношение к использованию HMI: в представлениях HMI для объектов AutomationML указывается информация об HMI |
Родительский класс | Путь доступа: |
A.4 Ролевой класс RoleClass "Enterprise"
Описание ролевого класса "Enterprise" (предприятие) приведено в таблице A.3.
На рисунке A.2 приведена структура, определенная в МЭК 62264-1.
Таблица A.3 - Ролевой класс RoleClass Enterprise
Имя класса | Enterprise |
Описание | Ролевой класс "Enterprise" должен использоваться для моделирования бизнес-структур. Определение понятия "Enterprise (предприятие)" приведено в МЭК 62264-1 (пункт 5.3.2): |
Родительский класс | Путь доступа: |
|

Рисунок A.2 - Структура ресурсов (МЭК 62264-1)
A.5 Ролевой класс RoleClass "Site"
Описание ролевого класса "Site" (производственная площадка) приведено в таблице A.4.
Таблица A.4 - Ролевой класс RoleClass Site
Имя класса | Site |
Описание | Ролевой класс "Site" используется для определения места производства. Он также используется как элемент иерархической организации. |
Родительский класс | Путь доступа: |
Пример - Производственная установка, производственная мощность.
A.6 Ролевой класс RoleClass "Area"
Описание ролевого класса "Area" (производственный участок) приведено в таблице A.5.
Таблица A.5 - Ролевой класс RoleClass Area
Имя класса | Area |
Описание | Ролевой класс "Area" используется для описания производственных зданий и их подразделений (несущая конструкция, зал). Он также используется как элемент иерархической организации. |
Родительский класс | Путь доступа: |
Пример - Административное здание.
A.7 Ролевой класс RoleClass "ProductionLine"
Описание ролевого класса "ProductionLine" (производственная линия) приведено в таблице A.6.
Таблица A.6 - Ролевой класс RoleClass ProductionLine
Имя класса | ProductionLine |
Описание | Ролевой класс "ProductionLine" используется для определения ролевой иерархии оборудования, установленной в МЭК 62264-1 (пункт 5.3.7), дискретного производства на уровне рабочей ячейки: |
Родительский класс | Путь доступа: |
A.8 Ролевой класс RoleClass "WorkCell"
Описание ролевого класса "WorkCell" (рабочая ячейка/гибкий производственный модуль) приведено в таблице A.7.
Таблица A.7 - Ролевой класс RoleClass WorkCell
Имя класса | WorkCell |
Описание | Ролевой класс "WorkCell" используется для разработки ролевой иерархии оборудования, определенной в МЭК 62264-1 на уровне рабочей ячейки: для второстепенных устройств (шагов субпроизводства) единиц оборудования (производственных линий), станций, отдельных компонентов процесса, циклов и расположений, где выполняются рассматриваемые шаги производства. Понятие рабочей ячейки используется для построения иерархий. |
Родительский класс | Путь доступа: |
A.9 Ролевой класс RoleClass "ProcessCell"
Описание ролевого класса "ProcessCell" (технологическая ячейка) приведено в таблице A.8.
Таблица A.8 - Ролевой класс RoleClass ProcessCell
Имя класса | ProcessCell |
Описание | Ролевой класс "ProcessCell" используется для описания второстепенных устройств (шагов производства) производственных единиц (производственных линий), станций, отдельных компонентов процесса, циклов и расположений, где выполняются рассматриваемые шаги производства. Понятие технологической ячейки используется для построения иерархий. |
Родительский класс | Путь доступа: |
A.10 Ролевой класс RoleClass "Unit"
Описание ролевого класса "Unit" (единичная установка/модуль) приведено в таблице A.9.
Таблица A.9 - Ролевой класс RoleClass Unit
Имя класса | Unit |
Описание | Ролевой класс "Unit" используется для описания связанных (цепных) производственных установок. Данный класс используется для построения иерархии. Определение понятия "Unit" приведено в МЭК 62264-1 (пункт 5.3.8): |
Родительский класс | Путь доступа: |
A.11 Ролевой класс RoleClass "ProductionUnit"
Описание ролевого класса "ProductionUnit" (производственная установка/производственный агрегат) приведено в таблице A.10.
Таблица A.10 - Ролевой класс RoleClass ProductionUnit
Имя класса | ProductionUnit |
Описание | Ролевой класс "ProductionUnit" используется для второстепенных устройств (шагов производства) производственных установок (производственных линий), станций, отдельных компонентов процесса, циклов и расположений, где выполняются рассматриваемые шаги производства. Понятие производственной установки используется для построения иерархий. |
Родительский класс | Путь доступа: |
A.12 Ролевой класс RoleClass "StorageZone"
Описание ролевого класса "StorageZone" (зона хранения) приведено в таблице A.11.
Таблица A.11 - Ролевой класс RoleClass StorageZone
Имя класса | StorageZone |
Описание | Ролевой класс "StorageZone" используется для определения ролевой иерархии оборудования, определенного в МЭК 62264-1 на уровне зоны хранения. |
Родительский класс | Путь доступа: |
Пример - Складское помещение, участок хранения жидкостей в баках, участок выдержки.
A.13 Ролевой класс RoleClass "StorageUnit"
Описание ролевого класса "StorageUnit" (блок хранения) приведено в таблице A.12.
Таблица A.12 - Ролевой класс RoleClass StorageUnit
Имя класса | StorageUnit |
Описание | Ролевой класс "StorageUnit" используется для определения ролевой иерархии оборудования, определенной в МЭК 62264-1 на уровне устройств хранения. |
Родительский класс | Путь доступа: |
Пример - Полка, бункер, разъем, бак, поддон, бочка.
A.14 Ролевой класс RoleClass "TurnTable"
Описание ролевого класса "TurnTable" (поворотный стол) приведено в таблице A.13.
Таблица A.13 - Ролевой класс RoleClass TurnTable
Имя класса | TurnTable |
Описание | Ролевой класс "TurnTable" используется для описания поворотного транспортного оборудования, которое изменяет горизонтальное направление движения продукта и/или носителя |
Родительский класс | Путь доступа: |
A.15 Ролевой класс RoleClass "Conveyor"
Описание ролевого класса "Conveyor" (конвейер) приведено в таблице A.14.
Таблица A.14 - Ролевой класс RoleClass Conveyor
Имя класса | Conveyor |
Описание | Ролевой класс "Conveyor" используется для описания родственного оборудования, обеспечивающего линейное транспортирование |
Родительский класс | Путь доступа: |
Пример - Устройство транспортирования, имеющее точку старта и точку остановки, но не имеющее точек ответвления.
A.16 Ролевой класс RoleClass "BeltConveyor"
Описание ролевого класса "BeltConveyor" (ленточный конвейер) приведено в таблице A.15.
Таблица A.15 - Ролевой класс RoleClass BeltConveyor
Имя класса | BeltConveyor |
Описание | Ролевой класс "BeltConveyor" используется для описания оборудования, выполняющего линейное транспортирование с помощью одной или нескольких лент в качестве транспортной платформы |
Родительский класс | Путь доступа: |
A.17 Ролевой класс RoleClass "RollConveyor"
Описание ролевого класса "RollConveyor" (барабанный конвейер) приведено в таблице A.16.
Таблица A.16 - Ролевой класс RoleClass RollConveyor
Имя класса | RollConveyor |
Описание | Ролевой класс "RollConveyor" используется для описания оборудования, выполняющего линейное транспортирование с помощью последовательности барабанов в качестве транспортной платформы |
Родительский класс | Путь доступа: |
A.18 Ролевой класс RoleClass "ChainConveyor"
Описание ролевого класса "ChainConveyor" (цепной конвейер) приведено в таблице A.17.
Таблица A.17 - Ролевой класс RoleClass ChainConveyor
Имя класса | ChainConveyor |
Описание | Ролевой класс "ChainConveyor" используется для описания оборудования, выполняющего линейное транспортирование с помощью бесконечной цепи в качестве транспортной среды |
Родительский класс | Путь доступа: |
A.19 Ролевой класс RoleClass "PalletConveyor"
Описание ролевого класса "PalletConveyor" (конвейер паллетов) приведено в таблице A.18.
Таблица A.18 - Ролевой класс RoleClass PalletConveyor
Имя класса | PalletConveyor |
Описание | Ролевой класс "PalletConveyor" используется для описания оборудования, предназначенного для линейного транспортирования паллетов |
Родительский класс | Путь доступа: |
A.20 Ролевой класс RoleClass "OverheadConveyor"
Описание ролевого класса "OverheadConveyor" (подвесной конвейер) приведено в таблице A.19.
Таблица A.19 - Ролевой класс RoleClass OverheadConveyor
Имя класса | OverheadConveyor |
Описание | Ролевой класс "OverheadConveyor" используется для описания оборудования, выполняющего подвесное транспортирование висящих продуктов (носителей) |
Родительский класс | Путь доступа: |
A.21 Ролевой класс RoleClass "LiftingTable"
Описание ролевого класса "LiftingTable" (подъемный стол) приведено в таблице A.20.
Таблица A.20 - Ролевой класс RoleClass LiftingTable
Имя класса | LiftingTable |
Описание | Ролевой класс "LiftingTable" используется для описания оборудования, выполняющего дискретное вертикальное транспортирование. При этом транспортная среда также поднимается. Обычно используется для небольших высот |
Родительский класс | Путь доступа: |
A.22 Ролевой класс RoleClass "AGV"
Описание ролевого класса "AGV" (транспортное средство с автоматическим управлением) приведено в таблице A.21.
Таблица A.21 - Ролевой класс RoleClass AGV
Имя класса | AGV |
Описание | Ролевой класс "AGV" используется для описания оборудования, выполняющего автоматическое транспортирование дискретных единиц независимо от другого транспортного оборудования |
Родительский класс | Путь доступа: |
A.23 Ролевой класс RoleClass "Transposer"
Описание ролевого класса "Transposer" (перестановщик) приведено в таблице A.22.
Таблица A.22 - Ролевой класс RoleClass Transposer
Имя класса | Transposer |
Описание | Ролевой класс "Transposer" используется для описания транспортного оборудования, изменяющего транспортную среду. Изменяет классификацию или соотношение между продуктом и носителем |
Родительский класс | Путь доступа: |
A.24 Ролевой класс RoleClass "CarrierHandlingSystem"
Описание ролевого класса "CarrierHandlingSystem" (система погрузки-разгрузки носителя) приведено в таблице A.23.
Таблица A.23 - Ролевой класс RoleClass CarrierHandlingSystem
Имя класса | CarrierHandlingSystem |
Описание | Ролевой класс "CarrierHandlingSystem" используется для описания оборудования, выполняющего действия с носителем |
Родительский класс | Путь доступа: |
Пример - Вилочный подъемник.
A.25 Ролевой класс RoleClass "BodyStore"
Описание ролевого класса "BodyStore" (хранение корпусов) приведено в таблице A.24.
Таблица A.24 - Ролевой класс RoleClass BodyStore
Имя класса | BodyStore |
Описание | Ролевой класс "BodyStore" используется для описания процедуры промежуточного хранения дискретных продуктов |
Родительский класс | Путь доступа: |
Пример - Промежуточное хранение корпусов.
A.26 Ролевой класс RoleClass "Lift"
Описание ролевого класса "Lift" (лифт) приведено в таблице A.25.
Таблица A.25 - Ролевой класс RoleClass Lift
Имя класса | Lift |
Описание | Ролевой класс "Lift" используется для описания оборудования, выполняющего дискретное вертикальное транспортирование. Обычно используется для тяжелых грузов |
Родительский класс | Путь доступа: |
Пример - Подъемное устройство.
A.27 Ролевой класс RoleClass "RollerBed"
Описание ролевого класса "RollerBed" (роликовый настил конвейера) приведено в таблице А.26.
Таблица A.26 - Ролевой класс RoleClass RollerBed
Имя класса | RollerBed |
Описание | Ролевой класс "RollerBed" используется для описания набора роликов. Данные ролики не являются приводными. Они вращаются свободно |
Родительский класс | Путь доступа: |
A.28 Ролевой класс RoleClass "StationaryTool"
Описание ролевого класса "StationaryTool" (стационарный инструмент) приведено в таблице A.27.
Таблица A.27 - Ролевой класс RoleClass StationaryTool
Имя класса | StationaryTool |
Описание | Ролевой класс "StationaryTool" используется для описания инструмента, установленного в определенном месте |
Родительский класс | Путь доступа: |
A.29 Ролевой класс RoleClass "MovableTool"
Описание ролевого класса "MovableTool" (передвижной инструмент) приведено в таблице A.28.
Таблица A.28 - Ролевой класс RoleClass MovableTool
Имя класса | MovableTool |
Описание | Ролевой класс "MovableTool" используется для описания инструмента, который может передвигаться с помощью специального оборудования (робота) |
Родительский класс | Путь доступа: |
A.30 Ролевой класс RoleClass "ControlCabinet"
Описание ролевого класса "ControlCabinet" (кабина управления) приведено в таблице A.29.
Таблица A.29 - Ролевой класс RoleClass ControlCabinet
Имя класса | ControlCabinet |
Описание | Ролевой класс "ControlCabinet" используется для описания огороженных электрических (электронных) сборок |
Родительский класс | Путь доступа: |
Пример - Распределительный щит, коробка управления.
A.31 Ролевой класс RoleClass "IODevice"
Описание ролевого класса "IODevice" (устройство ввода-вывода) приведено в таблице A.30.
Таблица A.30 - Ролевой класс RoleClass IODevice
Имя класса | IODevice |
Описание | Ролевой класс "IODevice" используется для описания устройств, обеспечивающих соединение сенсора (исполнительного устройства) с автоматической системой. Устройство IODevice может состоять из различных модулей |
Родительский класс | Путь доступа: |
Пример - Устройство, состоящее из аналоговых/цифровых модулей входа/выхода.
A.32 Ролевой класс RoleClass "HMI"
Описание ролевого класса "HMI" (человеко-машинный интерфейс) приведено в таблице A.31.
Таблица A.31 - Ролевой класс RoleClass HMI
Имя класса | HMI |
Описание | Ролевой класс "HMI" используется для описания функциональной возможности визуализировать процесс промышленного управления (систему мониторинга) для обеспечения эффективной работы оператора по выполнению технологических операций и управлению станком |
Родительский класс | Путь доступа: |
A.33 Ролевой класс RoleClass "WarningEquipment"
Описание ролевого класса "WarningEquipment" (предупреждающее оборудование) приведено в таблице A.32.
Таблица A.32 - Ролевой класс RoleClass WarningEquipment
Имя класса | WarningEquipment |
Описание | Ролевой класс "WarningEquipment" используется для описания функциональных возможностей предупреждающего оборудования. |
Родительский класс | Путь доступа: |
Пример - Гудок, световой сигнал, вибрация, сирена, сигнальная лампа.
A.34 Ролевой класс RoleClass "ActuatingDrive"
Описание ролевого класса "ActuatingDrive" (исполнительное устройство привода) приведено в таблице A.33.
Таблица A.33 - Ролевой класс RoleClass ActuatingDrive
Имя класса | ActuatingDrive |
Описание | Ролевой класс "ActuatingDrive" используется для описания физических устройств, обеспечивающих механический привод конечных управляющих элементов |
Родительский класс | Путь доступа: |
Пример - Электрический привод, гидравлический привод, пневматический привод.
A.35 Ролевой класс RoleClass "MotionController"
Описание ролевого класса "MotionController" (контроллер движения) приведено в таблице A.34.
Таблица A.34 - Ролевой класс RoleClass MotionController
Имя класса | MotionController |
Описание | Ролевой класс "MotionController" определяет логику задания точек профиля (требуемый результирующий профиль или профиль движения), а также логику замыкания обратной связи по положению (скорости) |
Родительский класс | Путь доступа: |
A.36 Ролевой класс RoleClass "Panel"
Описание ролевого класса "Panel" (панель управления) приведено в таблице A.35.
Таблица A.35 - Ролевой класс RoleClass Panel
Имя класса | Panel |
Описание | Ролевой класс "Panel" используется для описания физических объектов, обеспечивающих взаимодействие человека с машиной |
Родительский класс | Путь доступа: |
Пример - Панель управления, сканер, панель монитора, клавиатура.
A.37 Ролевой класс RoleClass "MeasuringEquipment"
Описание ролевого класса "MeasuringEquipment" (измерительное оборудование) приведено в таблице A.36.
Таблица A.36 - Ролевой класс RoleClass MeasuringEquipment
Имя класса | MeasuringEquipment |
Описание | Ролевой класс "MeasuringEquipment" используется для описания оборудования, определенного в МЭК 60050-311 (311-03-05): "Сборка измерительного инструмента, предназначенного для специальных измерений" |
Родительский класс | Путь доступа: |
Пример - Станок для измерения поверхностей, датчик измерения толщины покрытия (краски).
A.38 Ролевой класс RoleClass "Clamp"
Описание ролевого класса "Clamp" (захват) приведено в таблице A.37.
Таблица A.37 - Ролевой класс RoleClass Clamp
Имя класса | Clamp |
Описание | Ролевой класс "Захват" используется для описания оборудования, выполняющего крепление и удержание изделия в заданной точке |
Родительский класс | Путь доступа: |
A.39 Ролевой класс RoleClass "ProcessController"
Описание ролевого класса "ProcessController" (контроллер процесса/управляющий контроллер) приведено в таблице A.38.
Таблица A.38 - Ролевой класс RoleClass ProcessController
Имя класса | ProcessController |
Описание | Ролевой класс "ProcessController" используется для описания управления специальным инструментом (станком), выполняющим пошаговые технологические операции |
Родительский класс | Путь доступа: |
Пример - Управление сваркой, управление технологическим процессом, управление нанесением клея, комбинация управления процессом и регулирования процесса.
A.40 Ролевой класс RoleClass "Loader"
Описание ролевого класса "Loader" (погрузчик) приведено в таблице A.39.
Таблица A.39 - Ролевой класс RoleClass Loader
Имя класса | Loader |
Описание | Ролевой класс "Loader" используется для описания оборудования, вносящего продукты в производственный процесс |
Родительский класс | Путь доступа: |
Пример - Загрузочное устройство магазинного типа.
A.41 Ролевой класс RoleClass "Unloader"
Описание ролевого класса "Unloader" (разгрузчик) приведено в таблице A.40.
Таблица A.40 - Ролевой класс RoleClass Unloader
Имя класса | Unloader |
Описание | Ролевой класс "Unloader" используется для описания оборудования, выгружающего продукты из производственного процесса |
Родительский класс | Путь доступа: |
Приложение B
(справочное)
Примеры использования ролевых классов RoleClasses
B.1 Общие положения
Ролевые классы RoleClasses не зависят от конкретного продавца, являются характеристическими универсальными сущностями и используются для назначения родовой семантики экземплярам объекта при описании требований к рассматриваемым экземплярам объекта. Кроме того, ролевые классы способствуют отображению (мэппингу) моделей данных различных средств инженерии.
Рисунок B.1 поясняет вышесказанное на конкретном примере. Объект RB1 модели данных Tool1 моделируется с помощью языка AutomationML в качестве внутреннего элемента InternalElement, полученного из класса системных единиц SystemUnitClass Type_RB, и ассоциируется с классом ролей RoleClass "Robot" (робот). Модель Tool2 имеет иерархию экземпляров InstanceHierarchy, содержащую внутренний элемент InternalElement 3285_AB. Объект типа Rob относится к тому же ролевому классу RoleClass "Robot". Отображение между этими двумя моделями обеспечивается с помощью ролевого класса RoleClass Robot, являющегося общим для обоих внутренних элементов InternalElement.
|

Рисунок B.1 - Применение ролей в процессе отображения
B.2 Пример производственной установки
Применение ролевого класса RoleClasses поясняется на примере простой ячейки. Ячейка производственной установки приведена на рисунке B.2. Она состоит из трех компонентов производственной установки: конвейер, робот и поворотный стол. Робот ставит детали на конвейер. Конвейер транспортирует детали к поворотному столу. Поворотный стол направляет детали в последующие технологические ячейки производственной установки.
|

Рисунок B.2 - Пример применения ролей
Пример на рисунке B.3 содержит стандартные библиотеки AutomationML (библиотеку базового ролевого класса AutomationMLBaseRoleClassLib, библиотеку ролевого класса дискретного производственного процесса AutomationMLDMIRoleClassLib, расширенную библиотеку ролевого класса AutomationMLExtendedRoleClassLib), конкретную производственную установку рассматриваемой иерархии экземпляров InstanceHierarchy (пример роли RoleExample), различные типы компонентов производственной установки библиотеки класса системных единиц SystemUnitClass (пример библиотеки класса системных единиц ExampleSystemUnitClassLib). Рассматриваемые библиотеки ролевых классов RoleClassLibs и встроенные ролевые классы RoleClasses определены в МЭК 62714-1, а также в разделе 5 и приложении A настоящего стандарта.
|

Рисунок B.3 - Пример модели AutomationML
В качестве примера иерархия экземпляров InstanceHierarchy с именем RoleExample приведена на рисунках B.4-B.6. Пример производственной установки содержит описание ячейки, обозначенной как ролевой класс рабочей ячейки RoleClass "WorkCell" расширенной библиотеки AutomationMLExtendedRoleClassLib. Ссылка на данный ролевой класс означает, что рассматриваемый внутренний элемент иерархии (InternalElement) содержит описание производственной линии (станции), в которой происходит выполнение рассматриваемого производственного шага. Кроме того, данная ячейка указывает на структуру ресурса ролевого класса RoleClass ResourceStructure библиотеки базового ролевого класса AutomationMLBaseRoleClassLib. Это означает, что данная ячейка является ресурс-ориентированным объектом иерархии.
|

Рисунок B.4 - Пример иерархии экземпляров InstanceHierarchy для применения ролей
|

Рисунок B.5 - Табличное представление примера иерархии экземпляров InstanceHierarchy для применения ролей
|

Рисунок B.6 - Описание примера иерархии экземпляров InstanceHierarchy для применения ролей на языке XML
На следующем уровне иерархии ячейка внутреннего элемента InternalElement Cell задействует явный ресурс внутреннего элемента InternalElement Resource, который ссылается на ресурс ролевого класса RoleClass Resource библиотеки базового ролевого класса AutomationMLBaseRoleClassLib. Методика разделения рассматриваемой сущности на ресурс, продукт и процесс определена в МЭК 62714-1. Ресурсы характеризуют производственные установки, оборудование и прочие средства производства.
В рассматриваемой иерархии под уровнем InternalElement Resource понимаются три различных компонента производственной установки:
- внутренний элемент InternalElement RB1, который ссылается на ролевой класс RoleClass Robot. Ролевой класс RoleClass - это стандартный ролевой класс AutomationML RoleClass, определенный в библиотеке ролевого класса дискретного промышленного производства AutomationMLDMIRoleClassLib. Это означает, что внутренний элемент InternalElement представляет автоматически управляемые, перепрограммируемые, многоцелевые манипуляторы, программируемые по трем и более осям. Они могут либо быть фиксированы в заданном месте, либо могут передвигаться при использовании в приложениях промышленной автоматизации. Более того, рассматриваемая практическая техническая реализация выводится из класса системных единиц SystemUnitClass Drehtisch, описанного ниже;
- внутренний элемент InternalElement DT2, который ссылается на ролевой класс RoleClass Fixture (поворотный стол), определен в рамках расширенной справочной библиотеки ролевых классов AutomationMLExtendedRole ClassLib. Более того, он обладает ссылкой на стандартный ролевой класс RoleClass "Fixture" (устройство крепления) библиотеки ролевых классов дискретного промышленного производства AutomationMLDMIRoleClassLib. Это означает, что он представляет оборудование для поворота, изменяющее горизонтальное направление транспортирования продукта (носителя). В то же время рассматриваемый внутренний элемент InternalElement - это оборудование, уменьшающее число степеней свободы элемента. Оба ролевого класса RoleClasses поддерживаются данным внутренним элементом InternalElement. Более того, рассматриваемая техническая практическая реализация выводится из класса системных единиц SystemUnitClass Drehtisch, описанного ниже;
- внутренний элемент InternalElement TB3, который ссылается на ролевой класс RoleClass BidirectionalConveyor (конвейер с двумя направлениями движения). Данный ролевой класс является пользовательским. Определение данного ролевого класса находится во внешней среде по ссылке ExternalReference (см. рисунок B.7), которая указывает на файл c://xyz_lib.AutomationML на локальном хост-компьютере и идентифицируется посредством сущности Alias MyLib. На ролевой класс RoleClass BidirectionalConveyor производится ссылка с помощью пути доступа RefRoleClassPath, содержащего строку "MyLib@MyLib/Conveyor/BidirectionalConveyor" (см. рисунок B.8). Это означает, что данный внутренний элемент InternalElement является пользовательским элементом, который вследствие наложенных спецификациями AutomationML ограничений выводится прямо или косвенно из класса базовых ролей AutomationMLBaseRoleClass. Технические аспекты практической реализации получения класса системных единиц SystemUnitClass Transportband описаны ниже.
|

Рисунок B.7 - Внешняя ссылка на библиотеку ролевого класса RoleClassLib
|

Рисунок B.8 - Пример применения внешнего ролевого класса
Библиотека класса системных единиц SystemUnitClass для примера библиотеки с названием ExampleSystemUnitClassLib приведена на рисунках B.9-B.11. В рамках данной библиотеки моделируются три типа компонентов производственной установки:
- класс Roboter, который указывает на ролевой класс RoleClass Robot. Ролевой класс RoleClass - это стандартный ролевой класс RoleClass AutomationML, определенный в библиотеке ролевого класса дискретного промышленного производства AutomationMLDMIRoleClassLib. Это означает, что рассматриваемый класс системных единиц SystemUnitClass представляет автоматически управляемые, перепрограммируемые, многоцелевые манипуляторы, программируемые по трем и более осям, которые могут быть либо зафиксированы в пространстве, либо могут быть подвижными для использования в приложениях промышленной автоматизации;
- класс Drehtisch, который указывает на ролевой класс RoleClass Turntable и ролевой класс Clamp, определенные в справочной расширенной библиотеке AutomationMLExtendedRoleClassLib. Это означает, что рассматриваемый класс представляет транспортное поворотное оборудование, которое изменяет направление горизонтального транспортирования продукта и/или носителя. В то же самое время класс системных единиц SystemUnitClass осуществляет процессы крепления и удержания изделий в заданной точке. Оба указанных ролевых класса RoleClasses поддерживаются классом системных единиц SystemUnitClass;
- класс Transportband, который указывает на ролевой класс RoleClass Transport. Данный ролевой класс RoleClass - это стандартный ролевой класс RoleClass AutomationML, определенный в библиотеке ролевого класса дискретного промышленного производства AutomationMLDMIRoleClassLib. Это означает, что данный класс системных единиц SystemUnitClass - это оборудование, обеспечивающее транспортирование изделия из одного положения в другое.
В настоящем примере классы системных единиц SystemUnitClasses содержат описание типов компонентов производственной установки. Данные типы могут зависеть от выбора системы (языка). В данном случае названия классов приведены на немецком языке. Принятые правила изложения делают возможным понимание примера, даже если немецкий язык не поддерживается программой.
|

Рисунок B.9 - Пример библиотеки класса системных единиц SystemUnitClass для применения ролей
|
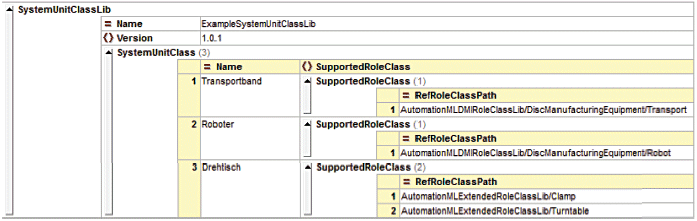
Рисунок B.10 - Табличное XML-представление примера библиотеки класса системных единиц SystemUnitClass для применения ролей
|

Рисунок B.11 - Описание на языке XML примера библиотеки SystemUnitClass для применения ролей
Приложение C
(справочное)
Пользовательские библиотеки ролевых классов RoleClass
C.1 Общие положения
В данном примере рассмотрены некоторые существующие пользовательские библиотеки различного типа и происхождения:
- UserDefinedRoleClassLibFoodAndBeverage.AutomationML, промышленная библиотека материалов о еде и напитках, см. рисунок C.1;
- UserDefinedRoleClassLibRedBookVDMA.AutomationML, ассоциированная библиотека фонда VDMA (Verband Deutscher Maschinen - und Anlagenbau - German Engineering Federation, Германия) и фонда VDW (Verein Deutscher Werkzeugmaschinenhersteller - German Machine Tool Manufacturers Union, Германия) - RedBook ("красная" книга); вышеуказанные ресурсы содержат все типы инструментальных станков, изготавливаемых в Германии;
- UserDefinedRoleClassLibCompanySpecificStructure.AutomationML, специализированная библиотека предприятия, включающая структурные классы. Данная библиотека - это конкретный рабочий пример создания и применения библиотеки на практике;
- UserDefinedRoleClassLibPandixPCE.AutomationML, а также UserDefinedRoleClassLibPandixPPE.AutomationML, это типовые библиотеки, относящиеся к технологии машиностроения. Используется формат библиотек PandIX. Формат PandIX - это модель данных для описания информации о трубопроводных системах и инструментарии производственной установки в аспекте процесса ее автоматизации. Данные библиотеки - это руководство по моделированию инженерных данных управления технологическим процессом. Описание содержится в диаграммах P&ID (диаграмма трубопроводных систем и инструментария), которые формализуют доступ к указанным данным. При разработке систем автоматизации технологических процессов используются библиотеки в формате CAEX.
Указанные примеры подробно не рассматриваются в МЭК 62714. В дальнейшем возможно появление специальных инструментальных библиотек, а также библиотек стандартов производственных компаний.
|

Рисунок C.1 - Пользовательская библиотека ролевого класса RoleClassLib AutomationML "еда и напитки" FoodAndBeverage
C.2 Внешняя семантика атрибутов
Для использования ссылок на внешние определения атрибутов необходимо задействовать элемент "RefSemantic" формата CAEX. Данный элемент ссылается на семантику атрибутов, определенную в других стандартах. На рисунке C.2 пример роли ExampleRole имеет атрибут Height (высота). Данный атрибут определен в МЭК 60050-113 (113-01-21). Он имеет путь доступа CorrespondingAttributePath. Данный механизм помогает оформлять ссылки на внешние определения атрибутов.
|

Рисунок C.2 - Пример внешней семантики атрибута
Приложение D
(справочное)
Примеры представления библиотек AutomationML на языке XML
D.1 Библиотека ролевых классов дискретного производственного процесса AutomationMLDMIRoleClassLib
<?xml version="1.0" encoding="utf-8"?>
<CAEXFile FileName="AutomationMLDMIRoleClassLib.AutomationML" SchemaVersion="2.15"
xsi:noNamespaceSchemaLocation="CAEX_ClassModel_V2.15.xsd"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<AdditionalInformation AutomationMLVersion="2.0" />
<AdditionalInformation>
<WriterHeader>
<WriterName>IEC SC65E WG 9</WriterName>
<WriterID>IEC SC65E WG 9</WriterID>
<WriterVendor>IEC</WriterVendor>
<WriterVendorURL>www.iec.ch</WriterVendorURL>
<WriterVersion>1.0</WriterVersion>
<WriterRelease>1.0.0</WriterRelease>
<LastWritingDateTime>2013-03-01</LastWritingDateTime>
<WriterProjectTitle>Automation Markup Language Standard
Libraries</WriterProjectTitle>
<WriterProjectID>Automation Markup Language Standard
Libraries</WriterProjectID>
</WriterHeader>
</AdditionalInformation>
<ExternalReference Path="AutomationMLBaseRoleClassLib.AutomationML"
Alias="AutomationMLBaseRoleClassLib" />
<RoleClassLib Name="AutomationMLDMIRoleClassLib">
<Description>Automation Markup Language Discrete Manufacturing Industry Role
Class Library</Description>
<Version>2.4.0</Version>
<RoleClass Name="DiscManufacturingEquipment"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Resource">
<RoleClass Name="Transport" RefBaseClassPath="DiscManufacturingEquipment"
/>
<RoleClass Name="Storage" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Fixture" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Gate" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Robot" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Tool" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Carrier" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="Machine" RefBaseClassPath="DiscManufacturingEquipment" />
<RoleClass Name="StaticObject"
RefBaseClassPath="DiscManufacturingEquipment" />
</RoleClass>
</RoleClassLib>
</CAEXFile>
D.2 Библиотека ролевых классов непрерывного производственного процесса AutomationMLCMIRoleClassLib
<?xml version="1.0" encoding="utf-8"?>
<CAEXFile FileName="AutomationMLCMIRoleClassLib.AutomationML" SchemaVersion="2.15"
xsi:noNamespaceSchemaLocation="CAEX_ClassModel_V2.15.xsd"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<AdditionalInformation AutomationMLVersion="2.0" />
<AdditionalInformation>
<WriterHeader>
<WriterName>IEC SC65E WG 9</WriterName>
<WriterID>IEC SC65E WG 9</WriterID>
<WriterVendor>IEC</WriterVendor>
<WriterVendorURL>www.iec.ch</WriterVendorURL>
<WriterVersion>1.0</WriterVersion>
<WriterRelease>1.0.0</WriterRelease>
<LastWritingDateTime>2013-03-01</LastWritingDateTime>
<WriterProjectTitle>Automation Markup Language Standard
Libraries</WriterProjectTitle>
<WriterProjectID>Automation Markup Language Standard
Libraries</WriterProjectID>
</WriterHeader>
</AdditionalInformation>
<ExternalReference Path="AutomationMLBaseRoleClassLib.AutomationML"
Alias="AutomationMLBaseRoleClassLib" />
<RoleClassLib Name="AutomationMLCMIRoleClassLib">
<Description>Automation Markup Language Continuous Manufacturing Industry Role
Class Library</Description>
<Version>1.1.0</Version>
<RoleClass Name="ContManufacturingEquipment"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Resource" />
</RoleClassLib>
</CAEXFile>
D.3 Библиотека ролевых классов серийного промышленного производства AutomationMLBMIRoleClassLib
<?xml version="1.0" encoding="utf-8"?>
<CAEXFile FileName="AutomationMLBMIRoleClassLib.AutomationML" SchemaVersion="2.15"
xsi:noNamespaceSchemaLocation="CAEX_ClassModel_V2.15.xsd"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<AdditionalInformation AutomationMLVersion="2.0" />
<AdditionalInformation>
<WriterHeader>
<WriterName>IEC SC65E WG 9</WriterName>
<WriterID>IEC SC65E WG 9</WriterID>
<WriterVendor>IEC</WriterVendor>
<WriterVendorURL>www.iec.ch</WriterVendorURL>
<WriterVersion>1.0</WriterVersion>
<WriterRelease>1.0.0</WriterRelease>
<LastWritingDateTime>2013-03-01</LastWritingDateTime>
<WriterProjectTitle>Automation Markup Language Standard
Libraries</WriterProjectTitle>
<WriterProjectID>Automation Markup Language Standard
Libraries</WriterProjectID>
</WriterHeader>
</AdditionalInformation>
<ExternalReference Path="AutomationMLBaseRoleClassLib.AutomationML"
Alias="AutomationMLBaseRoleClassLib" />
<RoleClassLib Name="AutomationMLBMIRoleClassLib">
<Description>Automation Markup Language Batch Manufacturing Industry Role
Class Library</Description>
<Version>1.1.0</Version>
<RoleClass Name="BatchManufacturingEquipment"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Resource" />
</RoleClassLib>
</CAEXFile>
D.4 Библиотека ролевых классов системы управления AutomationMLCSRoleClassLib
<?xml version="1.0" encoding="utf-8"?>
<CAEXFile FileName="AutomationMLCSRoleClassLib.AutomationML" SchemaVersion="2.15"
xsi:noNamespaceSchemaLocation="CAEX_ClassModel_V2.15.xsd"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<AdditionalInformation AutomationMLVersion="2.0" />
<AdditionalInformation>
<WriterHeader>
<WriterName>IEC SC65E WG 9</WriterName>
<WriterID>IEC SC65E WG 9</WriterID>
<WriterVendor>IEC</WriterVendor>
<WriterVendorURL>www.iec.ch</WriterVendorURL>
<WriterVersion>1.0</WriterVersion>
<WriterRelease>1.0.0</WriterRelease>
<LastWritingDateTime>2013-03-01</LastWritingDateTime>
<WriterProjectTitle>Automation Markup Language Standard
Libraries</WriterProjectTitle>
<WriterProjectID>Automation Markup Language Standard
Libraries</WriterProjectID>
</WriterHeader>
</AdditionalInformation>
<ExternalReference Path="AutomationMLBaseRoleClassLib.AutomationML"
Alias="AutomationMLBaseRoleClassLib" />
<RoleClassLib Name="AutomationMLCSRoleClassLib">
<Description>Automation Markup Language Control Industry Role Class
Library</Description>
<Version>2.3.0</Version>
<RoleClass Name="ControlEquipment"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Resource">
<RoleClass Name="Communication" RefBaseClassPath="ControlEquipment" />
<RoleClass Name="ControlHardware" RefBaseClassPath="ControlEquipment">
<RoleClass Name="PC" RefBaseClassPath="ControlHardware" />
<RoleClass Name="IPC" RefBaseClassPath="ControlHardware" />
<RoleClass Name="EmbeddedDevice" RefBaseClassPath="ControlHardware" />
<RoleClass Name="Handheld" RefBaseClassPath="ControlHardware" />
</RoleClass>
<RoleClass Name="Sensor" RefBaseClassPath="ControlEquipment" />
<RoleClass Name="Actuator" RefBaseClassPath="ControlEquipment" />
<RoleClass Name="Controller" RefBaseClassPath="ControlEquipment">
<RoleClass Name="PLC" RefBaseClassPath="Controller" />
<RoleClass Name="NC" RefBaseClassPath="Controller" />
<RoleClass Name="RC" RefBaseClassPath="Controller" />
<RoleClass Name="PAC" RefBaseClassPath="Controller" />
</RoleClass>
</RoleClass>
</RoleClassLib>
</CAEXFile>
D.5 Расширенная библиотека ролевых классов AutomationMLExtendedRoleClassLib
<?xml version="1.0" encoding="utf-8"?>
<CAEXFile FileName="AutomationMLExtendedRoleClassLib.AutomationML" SchemaVersion="2.15"
xsi:noNamespaceSchemaLocation="CAEX_ClassModel_V2.15.xsd"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<AdditionalInformation AutomationMLVersion="2.0" />
<AdditionalInformation>
<WriterHeader>
<WriterName>IEC SC65E WG 9</WriterName>
<WriterID>IEC SC65E WG 9</WriterID>
<WriterVendor>IEC</WriterVendor>
<WriterVendorURL>www.iec.ch</WriterVendorURL>
<WriterVersion>1.0</WriterVersion>
<WriterRelease>1.0.0</WriterRelease>
<LastWritingDateTime>2013-03-01</LastWritingDateTime>
<WriterProjectTitle>Automation Markup Language Standard
Libraries</WriterProjectTitle>
<WriterProjectID>Automation Markup Language Standard
Libraries</WriterProjectID>
</WriterHeader>
</AdditionalInformation>
<ExternalReference Path="AutomationMLBaseRoleClassLib.AutomationML"
Alias="AutomationMLBaseRoleClassLib" />
<ExternalReference Path="AutomationMLDMIRoleClassLib.AutomationML"
Alias="AutomationMLDMIRoleClassLib" />
<ExternalReference Path="AutomationMLCSRoleClassLib.AutomationML"
Alias="AutomationMLCSRoleClassLib" />
<RoleClassLib Name="AutomationMLExtendedRoleClassLib">
<Version>2.7.0</Version>
<RoleClass Name="PLCFacet"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Facet" />
<RoleClass Name="HMIFacet"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Facet" />
<RoleClass Name="Enterprise"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="Site"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="Area"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="ProductionLine"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="WorkCell"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="ProcessCell"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="Unit"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="ProductionUnit"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="StorageZone"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="StorageUnit"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Structure/ResourceStructure" />
<RoleClass Name="Turntable"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="Conveyor"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport">
<RoleClass Name="BeltConveyor" RefBaseClassPath="Conveyor" />
<RoleClass Name="RollConveyor" RefBaseClassPath="Conveyor" />
<RoleClass Name="ChainConveyor" RefBaseClassPath="Conveyor" />
<RoleClass Name="PalletConveyor" RefBaseClassPath="Conveyor" />
<RoleClass Name="OverheadConveyor" RefBaseClassPath="Conveyor" />
</RoleClass>
<RoleClass Name="LiftingTable"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="AGV"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="Transposer"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="CarrierHandlingSystem"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="BodyStore"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Storage" />
<RoleClass Name="Lift"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="Rollerbed"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Transport" />
<RoleClass Name="StationaryTool"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Tool" />
<RoleClass Name="MovableTool"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Tool" />
<RoleClass Name="ControlCabinet"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment" />
<RoleClass Name="IODevice"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment" />
<RoleClass Name="HMI"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment">
<RoleClass Name="WarningEquipment"
RefBaseClassPath="AutomationMLExtendedRoleClassLib/HMI" />
</RoleClass>
<RoleClass Name="ActuatingDrive"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment/Actuator" />
<RoleClass Name="MotionController"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment" />
<RoleClass Name="Panel"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment/ControlHardware" />
<RoleClass Name="MeasuringEquipment"
RefBaseClassPath="AutomationMLBaseRoleClassLib@AutomationMLBaseRoleClass
Lib/AutomationMLBaseRole/Resource" />
<RoleClass Name="Clamp"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Fixture" />
<RoleClass Name="ProcessController"
RefBaseClassPath="AutomationMLCSRoleClassLib@AutomationMLCSRoleClassLib/
ControlEquipment/Controller" />
<RoleClass Name="Loader"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Storage" />
<RoleClass Name="Unloader"
RefBaseClassPath="AutomationMLDMIRoleClassLib@AutomationMLDMIRoleClass
Lib/DiscManufacturingEquipment/Storage" />
</RoleClassLib>
</CAEXFile>
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 62714-1:2014 | IDT | ГОСТ Р МЭК 62714-1-2020 "Формат обмена инженерными данными для использования в системах промышленной автоматизации. Стандартизированный формат обмена данными AutomationML. Часть 1. Архитектура и общие требования" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: | ||
Библиография
[1] | ISO 8373:2012 | Robots and robotic devices - Vocabulary (Роботы и роботизированные устройства. Словарь) |
[2] | IEC 60050 (all parts) | International Electrotechnical Vocabulary (available at http://www.electropedia.org) [Международный электротехнический словарь (все части IEC 60050)] |
[3] | IEC 60050-113:2011 | International Electrotechnical Vocabulary - Part 113: Physics for electrotechnology (Международный электротехнический словарь. Часть 113. Физика в электротехнике) |
[4] | IEC 60050-311:2001 | International Electrotechnical Vocabulary - Electrical and electronic measurements and measuring instruments - Part 311: General terms relating to measurements (Международный электротехнический словарь. Электрические и электронные измерения и измерительные приборы. Часть 311. Общие термины, относящиеся к измерениям) |
[5] | IEC 60050-351:2013 | International electrotechnical vocabulary - Part 351: Control technology (Международный электротехнический словарь. Часть 351. Технология управления) |
[6] | IEC 61512-1 | Batch control - Part 1: Models and terminology [Управление периодическими (технологическими) процессами. Часть 1. Модели и терминология] |
[7] | IEC 62264-1:2013 | Enterprise-control system integration - Part 1: Models and terminology (Интеграция системы управления предприятием. Часть 1. Модели и терминология) |
[8] | IEC 62714-3 | Engineering data exchange format for use in industrial automation systems engineering - Automation Markup Language - Geometry and kinematics (Формат обмена техническими данными, используемый при проектировании промышленных автоматизированных систем. Язык автоматизированной разметки. Геометрия и кинематика) |
[9] | ANSI/ISA-88.01-1995 | Batch control - Part 1: Models and Terminology (Управление серийным производством. Часть 1. Модели и терминология) |
[10] | IEC 61360-4-DB:2005 | Standard data element types with associated classification scheme for electric components - Part 4: IEC reference collection of standard data element types and component classes Free access to Database (Стандартные типы элементов данных с соответствующей схемой классификации для электрических компонентов. Часть 4. Набор признаков стандартных типов элементов данных, классов компонентов и терминов в соответствии с МЭК) |
[11] | IEC 62424:2008 | Representation of process control engineering - Requests in P&I diagrams and data exchange between P&ID tools and PCE-CAE tools (Представление технологии контроля процесса. Запросы в диаграммах P&I и обмен данными между средствами P&ID и средствами PCE-CAE) |
[12] | Extensible Markup Language (XML) 1.0:2004, W3C Recommendation [Расширяемый язык разметки (XML) 1.0:2004, Рекомендации W3C] | |
УДК 658.52.011.56:006.354 | ОКС | 25.040.40 |
35.060 | ||
35.240.50 | ||
Ключевые слова: системы промышленной автоматизации, интеграция, формат обмена инженерными данными, стандартизованный формат обмена данными AutomationML | ||
Электронный текст документа
и сверен по:
.
, 2020
{kind=link}