ГОСТ Р 60.1.2.5-2020/ISO/TR 20218-2:2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ПРОЕКТИРОВАНИЕ ПРОМЫШЛЕННЫХ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ С УЧЕТОМ ТРЕБОВАНИЙ БЕЗОПАСНОСТИ
Часть 2
Позиции ручной загрузки/разгрузки
Robots and robotic devices. Design of industrial robotic systems with safety requirements. Part 2. Manual load/unload stations
ОКС 25.040.30
Дата введения 2021-03-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2020 г. N 1295-ст
4 Настоящий стандарт идентичен международному документу ISO/TR 20218-2:2017* "Робототехника. Требования безопасности для промышленных роботов. Часть 2. Позиции ручной загрузки/разгрузки" (ISO/TR 20218-2:2017 "Robotics - Safety requirements for industrial robots - Part 2: Manual load/unload stations", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного документа для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Безопасность" и распространяется на промышленных роботов. Он идентичен международному документу ISO/TR 20218-2:2017, разработанному техническим комитетом ИСО/ТК 299 "Робототехника".
Позиции ручной загрузки/разгрузки предназначены для непосредственного взаимодействия оператора с робототехническим комплексом. Например, оператор устанавливает заготовку на эту позицию для ее обработки и забирает оттуда обработанную деталь. Схема размещения роботизированного модуля проектируется так, чтобы рабочая зона была безопасна, и чтобы снизить вероятность обхода или нарушения разработанных средств защиты.
Настоящий стандарт дополняет требования безопасности к промышленным робототехническим комплексам, установленные в ИСО 10218-2:2011, 5.10.6. Он содержит дополнительные требования к позициям ручной загрузки/разгрузки, расположенным на высоте не более 1400 мм, для выполнения работ с учетом требований эргономики, соблюдая меры безопасности и затрудняя альтернативные способы доступа внутрь роботизированной ячейки. В ИСО 14738, ИСО 6385 и ИСО 10218-2, приложение А приведена дополнительная информация о потенциальных эргономических опасностях.
Примечание - В ИСО 10218-2:2011, 5.10.6 установлено, что минимальная высота периметрового ограждения (защитного ограждения) должна быть равна 1400 мм. Если результаты оценки риска показывают, что ограждение не может иметь высоту 1400 и более из-за конструкции позиции загрузки/разгрузки, то настоящий стандарт определяет альтернативную конструкцию, обеспечивающую уровень защиты оператора, соответствующий требованиям ИСО 10218-2:2011.
Применение ИСО 10218-2 предполагает выполнение тщательной оценки риска, которая используется для идентификации всех опасностей, связанных с процессом ручной загрузки/разгрузки. Настоящий стандарт содержит руководство по снижению риска для оператора. Для оценки риска необходимо учесть предсказуемые неправильные применения с последующим их уменьшением.
1 Область применения
Настоящий стандарт применим к промышленным робототехническим комплексам, в которых применяются операции ручной загрузки/разгрузки и в которых опасная зона защищена для предотвращения в нее доступа. Для данного типа прикладных задач важным является рассмотрение как ограничений доступа в опасную зону, так и эргономичного подхода к организации рабочих мест.
Настоящий стандарт дополняет ИСО 10218-2:2011 и предоставляет дополнительную информацию и рекомендации по снижению риска появления в опасной зоне при проектировании и ограждении позиций ручной загрузки/разгрузки.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты. Для датированных ссылок следует использовать указанное издание, для недатированных ссылок - последнее издание указанного документа, включая все изменения:
ISO 10218-1:2011, Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots (Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы)
ISO 10218-2:2011, Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration (Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 2. Робототехнические комплексы и их интеграция)
ISO 12100, Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин. Общие принципы проектирования. Оценки риска и снижения риска)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 10218-1, ИСО 10218-2 и ИСО 12100, а также следующие термины с соответствующими определениями.
ИСО и МЭК поддерживают терминологические базы данных для использования в документах по стандартизации по следующим адресам:
- платформа ИСО для онлайн-просмотра доступна по адресу http://www.iso.org/obp;
- Электропедия МЭК доступна по адресу http://www.electropedia.org.
3.1 задерживающее устройство (impeding device): Любая физическая преграда (низкая перегородка, рельс и т.п.), которая, не исключая полностью доступ в опасную зону, затрудняет его, снижая вероятность доступа в эту зону.
[ИСО 12100:2010, 3.29]
3.2 позиция ручной загрузки/разгрузки (manual load/unload station): Часть робототехнического комплекса, спроектированная для непосредственного выполнения ручных операций по установке и снятию деталей или заготовок для их обработки робототехническим комплексом.
3.3 оператор (operator): Лицо, которому поручена установка, эксплуатация, наладка, обслуживание, очистка, ремонт или транспортирование машинного оборудования.
Примечание 1 - Данное определение согласуется со смыслом и использованием данного термина в ИСО 10218-1, ИСО 10218-2 и ИСО/ТС 15066.
[ИСО 11161:2007, 3.14, модифицировано - добавлено примечание 1]
4 Оценка риска
Руководство по оценке риска представлено в ИСО 12100 и ИСО 10218-2. Основными опасностями, связанными с позициями ручной загрузки/разгрузки, являются опасности от робототехнического комплекса, представленные в ИСО 10218-2:2011, приложение А. Работая на позициях ручной загрузки/разгрузки, оператор непосредственно сталкивается с этими опасностями, поэтому особое внимание следует уделить средствам защиты.
Оценка риска для позиций ручной загрузки/разгрузки связана со следующими факторами:
a) возможность непреднамеренного доступа в защищенное пространство внутри роботизированной ячейки;
b) возможность преднамеренного доступа в защищенное пространство внутри роботизированной ячейки (например при техническом обслуживании или других ручных операциях);
c) вероятность перезапуска робототехнического комплекса в то время, когда оператор находится внутри защищенного пространства (например, если другой человек, находящийся вне роботизированной ячейки, перезапускает комплекс, не убедившись, что оператор находится внутри);
d) обычная работа оператора в зоне позиции ручной загрузки/разгрузки.
5 Проектирование позиций ручной загрузки/разгрузки с точки зрения безопасности
5.1 Общие положения
Позиции ручной загрузки/разгрузки предусматривают работу оператора и робототехнического комплекса в одной зоне, но не одновременно. Если предусмотрена совместная работа, то применяют ИСО 10218-2:2011, 5.11, и ISO/TS 15066. Существуют две основные проблемы:
a) защита оператора от опасностей, создаваемых роботом и робототехническим комплексом;
b) предотвращение доступа в опасные зоны за позицией ручной загрузки/разгрузки.
Размеры защитных устройств и защитных конструкций для предотвращения доступа в опасные зоны определены в ИСО 14120 и ИСО 13857. Для того чтобы минимизировать эргономические риски, высота позиций ручной загрузки/разгрузки может быть менее 1400 мм. В ИСО 13857 установлено, что защитные конструкции ниже 1400 мм не должны использоваться без дополнительных защитных мер.
Постоянное обнаружение присутствия с помощью датчиков можно использовать в качестве меры по предотвращению одной из следующих опасностей, либо обеих сразу:
- неожиданного запуска;
- контакта между оператором и робототехническим комплексом, контролируя их нахождение в разных зонах.
Примечание - Примером эргономического риска является работа с тяжелыми или большими заготовками во время операций ручной загрузки/разгрузки. Неадекватная проработка задания, машины или комплекса может привести к увеличению факторов эргономического риска для рабочего. Более подробная информация о факторах эргономического риска представлена в ИСО 6385, ИСО 14738 и ИСО 10218-2:2011, таблица А.1, пункт 8 (эргономические опасности).
Пример схемы размещения позиции ручной загрузки/разгрузки показан на рисунке 1.
|
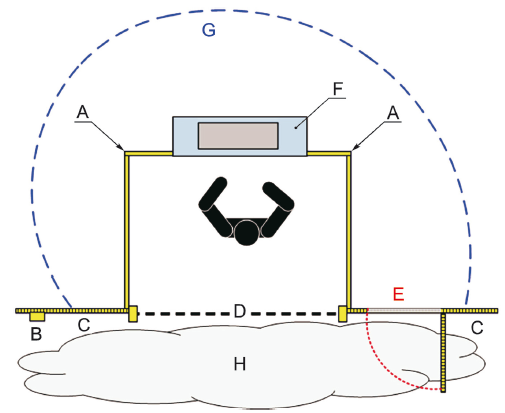
A - ограждение; B - повторный запуск; C - периметровое ограждение; D - предохранительное устройство (сенсорное предохранительное оборудование) или защитное ограждение с блокировкой; E - вход для технического обслуживания (показан как защитное ограждение с блокировкой); F - зона, в которой происходит ручная загрузка/разгрузка; G - опасная зона в защищенном пространстве; H - зона за пределами защищенного пространства (неопасная зона)
Примечание - Окружающие средства защиты не показаны для упрощения рисунка.
Рисунок 1 - Пример схемы размещения позиции ручной загрузки/разгрузки с использованием блокировки повторного запуска
5.2 Типовой проект
В ИСО 10218-2:2011, 5.5.2, определены требования к средствам обеспечения безопасного доступа оператора к робототехническому комплексу или роботизированной ячейке. Эти средства доступа должны располагаться вблизи позиций ручной загрузки/разгрузки, как показано на рисунке 2.
|
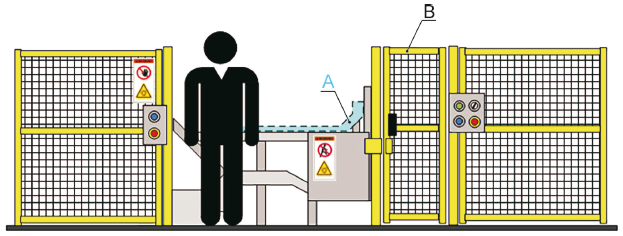
A - рабочее место; B - защитное ограждение с блокировкой
Примечание - Окружающие средства защиты не показаны для упрощения рисунка.
Рисунок 2 - Защитное ограждение с блокировкой, обеспечивающее доступ к роботизированной ячейке
Примечание - В приложении А и в ИСО 13857 приведены рекомендации по предотвращению доступа через проемы в неподвижном основании позиции ручной загрузки/разгрузки.
Факторы эргономического риска и опасности от робототехнического комплекса рассматривают с учетом руководящих принципов, представленных в данном подразделе.
Защиту от опасностей, с которыми рабочий может столкнуться, находясь на позиции ручной загрузки/разгрузки, обеспечивают с помощью ограждений, определенных в ИСО 14120, при надлежащих безопасных расстояниях, установленных в ИСО 13857:2008, таблица 2. Робототехнический комплекс защищают от нарушения безопасного расстояния с помощью немеханических ограничивающих устройств в соответствии с ИСО 10218-2:2011, 5.4 [например, с помощью ограничения по осям с расчетной безопасностью или электрочувствительного защитного оборудования (ЭЧЗО)]. Это означает, что интегратор должен учитывать расстояние остановки робототехнического комплекса при организации динамического ограниченного пространства робототехнического комплекса.
Примечание - Первоначальное расстояние остановки робототехнического комплекса может быть определено с помощью моделирования, но потом оно должно быть проверено и подтверждено на реальном оборудовании.
Защиту от опасностей, с которыми рабочий может столкнуться, находясь вне позиции ручной загрузки/разгрузки, осуществляют с помощью сенсорного предохранительного оборудования (СПО) и одного или нескольких ограждений с блокировкой, установленных в соответствии с ИСО 14119, ИСО 14120 и ИСО 13855.
Примеры, иллюстрирующие безопасные расстояния, показаны на рисунке 3.
Проникновение за ограждение и не обнаружение предохранительным устройством на входе позиции ручной загрузки/разгрузки предотвращают с помощью конструктивных мер (то есть расстояния между предохранительным устройством, контролирующим вход, и периметровыми средствами защиты) или с помощью дополнительных защитных устройств (например, используя ЭЧЗО). Перезапуск комплекса осуществляют в соответствии с ИСО 10218-2:2011, 5.6.3.4.
|

a) Сценарий 1: оператор, работающий на позиции ручной загрузки/разгрузки, и приближающийся к нему робот
Рисунок 3 - Примеры, иллюстрирующие безопасные расстояния для двух сценариев, лист 1
|
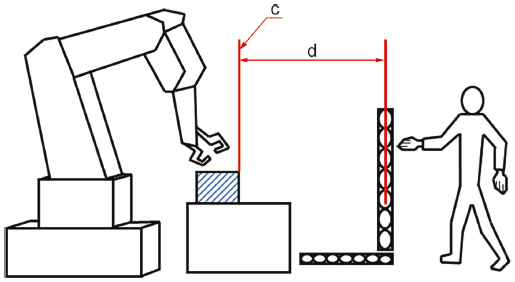
b) Сценарий 2: робот, работающий в зоне ручной загрузки/разгрузки, и приближающийся к нему оператор
a - "динамическое" ограничение зоны робототехнического комплекса, например, программное ограничение с расчетной безопасностью или ЭЧЗО; b - безопасное расстояние, когда неподвижное основание действует как защитная конструкция; c - ограниченное пространство робототехнического комплекса; d - безопасное расстояние в соответствии с ИСО 13855
Примечание - Окружающие средства защиты не показаны для упрощения рисунка.
Рисунок 3, лист 2
5.3 Задерживающие устройства высотой, равной или более 1400 мм
В ИСО 10218-2 представлено руководство по проектированию роботизированной ячейки для случаев, когда высота задерживающего устройства больше или равна 1400 мм.
5.4 Задерживающие устройства высотой от 1000 до 1400 мм
Если задерживающее устройство высотой 1400 мм не может быть создано из-за конструкции всего комплекса, то допускается уменьшение высоты задерживающего устройства до 1000 мм в зависимости от эффективности защиты, определяемой формой задерживающего устройства и результатами оценки риска. Отклонение от высоты 1400 мм должно быть как можно меньше. Число зон, в которых высота задерживающего устройства составляет менее 1400 мм, должно быть сведено к минимуму.
Если высота позиции ручной загрузки/разгрузки находится в промежутке между 1400 мм и 1000 мм, то ее неподвижное основание может стать задерживающим устройством для доступа к роботизированной ячейке (см. ИСО 13857). Хотя неподвижное основание может быть надлежащим задерживающим устройством, ИСО 10218-2 требует, чтобы при оценке риска были рассмотрены как опасности, создаваемые роботом и робототехническим комплексом, так и любые дополнительные средства защиты, необходимые для неподвижного основания (например, карманы для вилочного погрузчика представляют собой естественные ступени для подъема наверх). Если высота задерживающего устройства менее 1400 мм, то должны быть предприняты дополнительные защитные меры в соответствии с ИСО 13857. Эти меры являются комбинацией технических и инструктивных мер, например:
a) установка как можно более высоких ограждений и задерживающих устройств на позициях ручной загрузки/разгрузки;
b) создание отверстий и щелей в ограждениях как можно меньшего размера;
c) использование дополнительных предохранительных устройств (например ЭЧЗО, см. ИСО 13855), чтобы безопасно контролировать опасности в роботизированной ячейке (требования к минимальным расстояниям определены в ИСО 10218-2:2011, 5.10.3.3 и 5.10.3.4).
Дополнительно к средствам защиты, представленным выше, могут быть использованы следующие меры:
- предупреждающие знаки;
- письменные инструкции на позициях ручной загрузки/разгрузки;
- дополнительные меры по дальнейшему снижению остаточного риска обхода неподвижного основания с помощью расположенных поблизости безопасных средств доступа и надлежащего обучения операторов (см. ИСО 10218-2:2018, приложение С).
Блок-схема на рисунке 4 представляет руководство по снижению риска. Она дополняет рекомендации по характеристикам и проектированию мер по снижению риска, представленные в данном разделе.
|
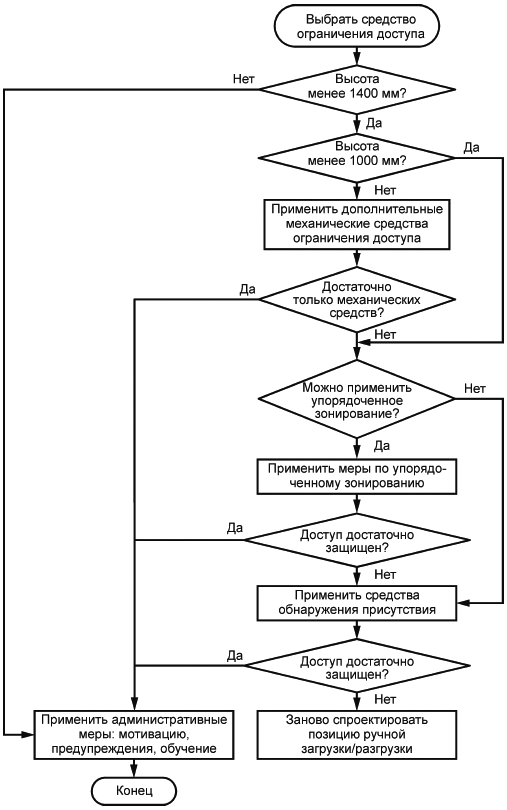
Рисунок 4 - Блок-схема стратегии снижения риска
5.5 Задерживающие устройства высотой менее 1000 мм
В ИСО 13857 установлено, что позиция ручной загрузки/разгрузки, расположенная ниже 1000 мм недостаточно ограничивает доступ к робототехническому комплексу и требует дополнительного предохранительного устройства.
В подобных случаях факт проникновения определяют с помощью одного или нескольких предохранительных устройств. В ИСО 10218-2:2011 установлено, что дизайн и конструкция рабочего места должны обеспечить эффективные меры по предотвращению проникновения в опасную зону внутри роботизированной ячейки или, если проникновение произошло, то чтобы риски, связанные с данным проникновением, были достаточно снижены. Чтобы добиться этого, проектная стратегия по предотвращению, препятствованию или обнаружению проникновения внутрь роботизированной ячейки через позицию ручной загрузки/разгрузки должна обеспечивать надлежащее снижение рисков, связанных с данным проникновением, с помощью реализации следующих принципов в указанном порядке:
1) механическая конструкция неподвижного основания должна быть спроектирована так, чтобы представлять собой задерживающее устройство;
2) упорядоченная последовательность нескольких зон должна выявлять движение человека через эти зоны и его проникновение внутрь роботизированной ячейки;
3) внутренние средства обнаружения проникновения должны использоваться для обнаружения человека, пытающегося проникнуть за неподвижное основание.
Подобные дополнительные меры считаются достаточными для предотвращения прогнозируемого обхода защитных устройств, например, могут быть добавлены расположенные под углом элементы конструкции для предотвращения перемещения по ЭЧЗО с целью проникновения внутрь роботизированной ячейки.
5.6 Механические препятствия в конструкции неподвижного основания
5.6.1 Предотвращение доступа всего тела
Конструкция неподвижного основания должна обеспечивать препятствие для проникновения через нее всего тела человека внутрь роботизированной ячейки путем проползания или пролезания сквозь проемы в данной конструкции. В конструкции неподвижного основания применяют принципы, изложенные в ИСО 13857 и ИСО 14120, особенно в части характеристик и ограничений, представленных ниже.
В ИСО 13857 рассмотрено проникновение через проемы в ограждении. Как указано в примечании к ИСО 13857, таблица 7, щелевые проемы шире 180 мм и квадратные или круглые проемы размером более 240 мм допускают проникновение через них всего тела человека. Проемы, конструкция которых не превышает данных ограничений, препятствуют проникновению путем пролезания.
Оценка риска позволяет определить, могут ли проемы большего размера препятствовать доступу путем пролезания сквозь них, с помощью анализа следующих факторов:
- имеющиеся антропометрические данные (см. ИСО 7250);
- габариты, обеспечивающие доступ путем пролезания (см. ЕН 547);
- другие физические характеристики проема, которые могут препятствовать доступу.
Пример - Если сквозной канал в неподвижном основании содержит поворот под углом 90°, то проникновение по нему путем пролезания весьма маловероятно.
Примечание - Недостаточно только разместить предупреждающие знаки, запрещающие проникновение через проемы в неподвижном основании путем проползания или пролезания.
5.6.2 Устранение ступеней
Вертикальные поверхности в конструкции неподвижного основания должны быть спроектированы так, чтобы исключить возможность перелезания через них.
a) Не должно быть ступеней или участка, где человек может взобраться, хватаясь за что-либо. Если данное условие не соблюдено, то проникновение человека должно быть обнаружено одним из следующих способов:
- электрочувствительным защитным оборудованием в соответствии с МЭК 61496, или
- защитным ограждением с блокировкой в соответствии с ИСО 14120 и ИСО 14119.
b) Не должно существовать возможности взобраться по склону, даже если человек хватается за что-либо (см. рисунок 5).
|
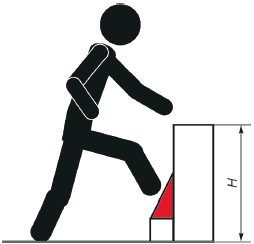
H - минимальная высота 1000 мм
Примечание - Окружающие средства защиты не показаны для упрощения рисунка.
Рисунок 5 - Пример исключения ступени с помощью скошенной плитки
Согласно ИСО 14120 конструкция ограждения и поддерживающих ее элементов не должна иметь участки, позволяющие перелезать через ограждение или обходить его.
5.7 Обнаружение проникновения в опасные зоны
Как установлено в МЭК 61496, IEC/TS 62046, ИСО 13855 и ИСО 13856, сенсорное предохранительное оборудование может быть использовано для обнаружения проникновения человека в опасную зону. Данное оборудование или комбинация нескольких СПО могут быть использованы следующим образом:
a) СПО установлено для обнаружения проникновения человека в защищенное пространство;
b) СПО установлено для определения движения человека (к опасной зоне или от нее) с помощью оценки расположения человека в разные моменты времени или с помощью определения направления движения человека;
c) метод оценки движения и расположения человека обеспечивает надежную оценку того, вошел ли человек в опасную зону, и в таком случае предохранительное устройство инициирует защитную остановку.
Если существует риск захода нескольких человек на позицию загрузки и доступа одного из них в опасную зону, то система должна фиксировать такую ситуацию и инициировать защитную остановку.
Требования к минимальным расстояниям определены в ИСО 10218-2:2011, 5.10.3.3 и 5.10.3.4.
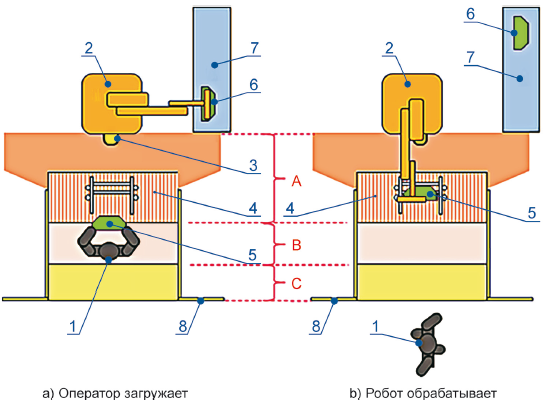
На рисунке 6 показан пример обнаружения проникновения с помощью последовательного зонирования и СПО.
|
Обозначения:
1 | оператор загружает позицию ручной загрузки/разгрузки | оператор выполняет другую работу |
2 | промышленный робототехнический комплекс перемещает | промышленный робототехнический комплекс обрабатывает |
3 | лазерный сканер (AOPDDR - активное оптоэлектронное предохранительное устройство, реагирующее на диффузное отражение) | |
4 | зона, в которой происходит ручная загрузка/разгрузка | |
5 | загрузка заготовки | обработка заготовки |
6 | перемещение заготовки | передача заготовки на конвейер |
7 | конвейер | |
8 | периметровое ограждение | |
А | внутренняя область обнаружения (также под позицией ручной загрузки/разгрузки) | |
В | область обнаружения зоны загрузки | |
С | область обнаружения зоны входа-выхода | |
Рисунок 6 - Сканер с тремя зонами
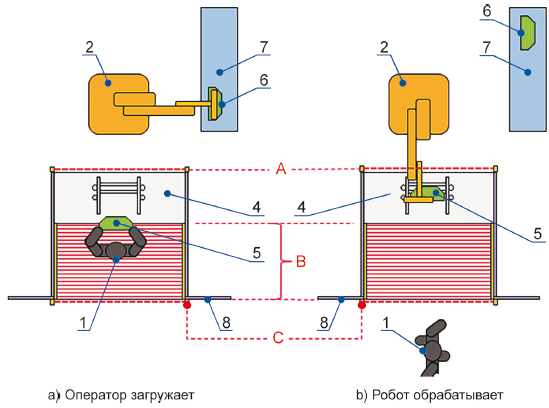
5.8 Обнаружение присутствия
Обнаружение проникновения используют для выявления человека, пытающегося пройти за неподвижное ограждение (см/ 5.6). Обнаружение присутствия предназначено для определения наличия человека внутри опасной зоны.
В зависимости от результатов оценки риска непрерывное обнаружение присутствия оператора на позиции ручной загрузки/разгрузки может быть необходимым.
Средствами для обнаружения проникновения являются:
- СПО, используемое для обнаружения во внутренней зоне непосредственно за неподвижным ограждением.
Примечание - См. рисунок 6, позиция 3, и рисунок 7, позиция А;
- сканеры под манипуляторами и неподвижными основаниями для выявления людей, перемещающихся со стороны позиции ручной загрузки/разгрузки внутрь роботизированной ячейки.
Примечание - См. рисунок 6, позиция 3;
- сенсорное предохранительное оборудование, установленное в соответствии с ИСО 10218-2:2011, 5.10.5.
|
Обозначения:
1 | оператор загружает позицию ручной загрузки/разгрузки | оператор выполняет другую работу |
2 | промышленный робототехнический комплекс перемещает | промышленный робототехнический комплекс обрабатывает |
4 | зона, в которой происходит ручная загрузка/разгрузка | |
5 | загрузка заготовки | обработка заготовки |
6 | перемещение заготовки | передача заготовки на конвейер |
7 | конвейер | |
8 | периметровое ограждение | |
А | внутренняя световая завеса безопасности (AOPD - активное оптоэлектронное предохранительное устройство) | |
В | световая завеса безопасности зоны загрузки - обнаружение присутствия (AOPD) | |
С | световая завеса безопасности входа-выхода (AOPD) | |
Рисунок 7 - Световая завеса внутри позиции ручной загрузки/разгрузки
6 Информация для пользователя
Информация для пользователя должна содержать сведения и инструкции, необходимые для правильного использования позиции ручной загрузки/разгрузки и ее встраивания в роботизированную ячейку. Данная информация должна отражать как использование по назначению, так и прогнозируемое неправильное применение позиции ручной загрузки/разгрузки и ее встраивания в роботизированную ячейку. Информация об остаточном риске и предупреждения должны быть предоставлены пользователю. Примерами предупреждающих надписей являются:
- "Вход запрещен";
- "Запрещенная точка доступа";
- "Не взбираться".
Примеры обычно используемых предупреждающих знаков показаны на рисунке 8.
|

Рисунок 8 - Примеры предупреждающих знаков
Примечание - База данных ИСО 7000 (доступна на платформе ИСО для онлайн-просмотра: https://www.iso.org/obp) содержит графические символы для предупреждающих знаков и других обозначений.
Информация для пользователя может включать такие элементы, как документация, знаки, сигналы, символы или диаграммы, используемые для передачи пользователю информации, связанной с безопасностью.
Стиль и содержание информации для пользователя должны отражать уровень образования, технического понимания и компетенции предполагаемого читателя. Язык изложения должен соответствовать предполагаемому пользователю.
Информация для пользователя от изготовителей компонентов также должна быть включена.
Данная информация может содержать следующие сведения, но не ограничиваться ими:
- необходимость в специальном обучении персонала;
- потребность в индивидуальных средствах защиты;
- потребность в дополнительных ограждениях или предохранительных устройствах.
Требования к информации для пользователя определены в ИСО 12100.
Примечание 1 - В МЭК 62079 приведена дополнительная информация по структурированию и представлению информации для пользователя.
Примечание 2 - В МЭК 60204-1 приведена дополнительная информация по требованиям безопасности к электрооборудованию машин.
Приложение А
(справочное)
Пример размеров проемов для предотвращения проникновения всего тела человека
На рисунке А.1 показан пример, в котором размеры проемов в неподвижном основании препятствуют проникновению всего тела человека. На позиции ручной загрузки/разгрузки показана заготовка (позиция A). Значения размеров проемов (позиции B, C и D) определены в ИСО 13857. Наклонные конструкции (позиция 1) являются примером устранения ступеней (см. рисунок 5), а диагональные конструкции (позиция 2) ограничивают проемы (позиции B, C и D).
|
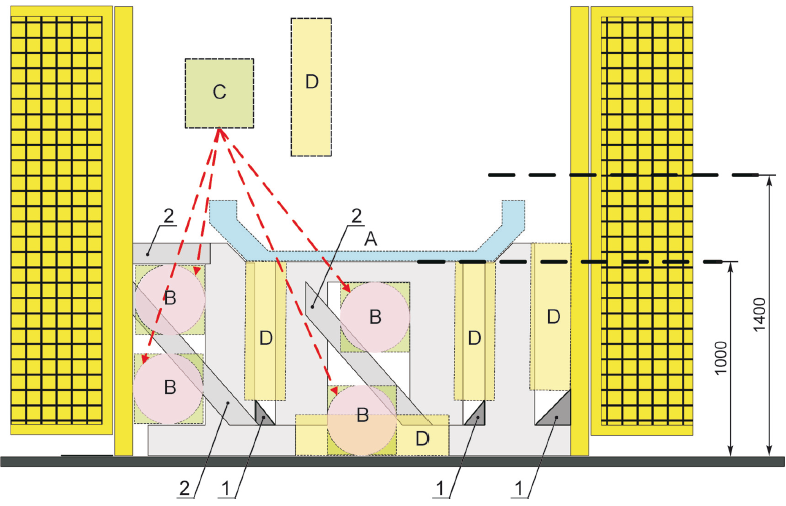
1 - наклонная поверхность добавлена для предотвращения использования выступов как ступеней для проникновения; 2 - конструкция, добавленная для ограничения размеров проемов; A - заготовка; B - круглое отверстие для предотвращения проникновения (максимальный диаметр 240 мм); C - квадратное отверстие для предотвращения проникновения (максимальный размер 240 мм); D - щелевой проем для предотвращения проникновения (максимальная ширина 180 мм)
Рисунок А.1 - Пример размеров проемов для предотвращения проникновения всего тела человека
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным и межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального и межгосударственного стандарта |
ISO 10218-1:2011 | IDT | ГОСТ Р 60.1.2.1-2016/ИСО 10218-1:2011 "Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы" |
ISO 10218-2:2011 | IDT | ГОСТ Р 60.1.2.2-2016/ИСО 10218-2:2011 "Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 2. Робототехнические системы и их интеграция" |
ISO 12100 | IDT | ГОСТ ISO 12100-2013 "Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: | ||
Библиография
[1] | ISO 6385, Ergonomics principles in the design of work systems |
[2] | ISO 7000, Graphical symbols for use on equipment - Registered symbols |
[3] | ISO 7250 (all parts), Basic human body measurements for technological design |
[4] | ISO 11161, Safety of machinery - Integrated manufacturing systems - Basic requirements |
[5] | ISO 13855, Safety of machinery - Positioning of safeguards with respect to the approach speeds of parts of the human body |
[6] | ISO 13856 (all parts), Safety of machinery - Pressure-sensitive protective devices |
[7] | ISO 13857:2008, Safety of machinery - Safety distances to prevent hazard zones being reached by upper and lower limbs |
[8] | ISO 14119, Safety of machinery - Interlocking devices associated with guards - Principles for design and selection |
[9] | ISO 14120, Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards |
[10] | ISO 14738, Safety of machinery - Anthropometric requirements for the design of workstations at machinery |
[11] | ISO/TS 15066, Robots and robotic devices - Collaborative robots |
[12] | IEC 60204-1, Safety of machinery - Electrical equipment of machines - Part 1: General requirements |
[13] | IEC 61496 (all parts), Safety of machinery - Electro-sensitive protective equipment |
[14] | IEC/TS 62046, Safety of machinery - Application of protective equipment to detect the presence of persons |
[15] | IEC 62079, Preparation of instructions - Structuring, content and presentation |
[16] | EN 547 (all parts), Safety of machinery - Human body measurements |
УДК 621.865:8:007.52:006.86:006.354 | ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, проектирование промышленных робототехнических комплексов, требования безопасности, позиции ручной загрузки/разгрузки | |
Электронный текст документа
и сверен по:
, 2021
{kind=link}