ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
пнет
824— 2023
Интеллектуальные транспортные системы
ДИНАМИЧЕСКАЯ ЦИФРОВАЯ КАРТА ДОРОЖНОГО ДВИЖЕНИЯ
Архитектура динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств
Издание официальное
Москва Российский институт стандартизации 2024
ПНСТ 824—2023
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью «НИИ ИТС» (ООО «НИИ ИТО»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 «Интеллектуальные транспортные системы»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 декабря 2023 г. № 102-пнст
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТР 1.16—2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направлять не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 125493 Москва, ул. Смольная, д. 2, и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д. 10, стр. 2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе «Национальные стандарты» и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
©Оформление. ФГБУ «Институт стандартизации», 2024
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ПНСТ 824—2023
Содержание
1 Область применения..................................................................1
2 Нормативные ссылки..................................................................1
3 Термины и определения. . .
4 Обозначения и сокращения
го го
5 Общие положения....................................................................3
6 Физическая архитектура динамической цифровой карты дорожного движения...................3
7 Требования к физической и функциональной архитектурам динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств.....5
8 Требования к средам штатной эксплуатации ..............................................6
9 Структура динамической цифровой карты дорожного движения...............................7
Приложение А (обязательное) Функциональная архитектура динамической цифровой карты дорожного движения......................................................19
Библиография........................................................................20
III
ПНСТ 824—2023
Введение
Управление дорожным движением, основанное на динамических цифровых картах дорожного движения, является следующим этапом в развитии интеллектуальных транспортных систем, которые направлены на обеспечение безопасного функционирования и повышение эффективности работы транспортного комплекса при внедрении высокоавтоматизированных транспортных средств [1].
Функционал динамической цифровой карты дорожного движения в первую очередь позволяет обеспечить качественное функционирование высокоавтоматизированных транспортных средств (ВАТС) в пределах среды штатной эксплуатации.
Внедрение ВАТС в уже существующую, исторически сложившуюся, транспортную систему необходимо обеспечивать поэтапно, при этом повышение эффективности выполнения транспортной работы не должно ухудшать безопасность движения других участников при соблюдении ими правил дорожного движения.
Основным подходом к обеспечению безопасности дорожного движения транспортной системы, в которой присутствуют ВАТС, является обеспечение ситуационной осведомленности ВАТС за счет применения дорожно-транспортной инфраструктуры и технологий риск-менеджмента.
Повышение ситуационной осведомленности достигается путем агрегации высокоточных данных внутри динамической цифровой карты дорожного движения и построения сервисной платформы, которая содержит внутри себя детальную информацию о статических и динамических объектах дороги. Использование высокоточных данных о статических и динамических объектах дороги позволяет расширить область среды штатной эксплуатации ВАТС за счет увеличения их сенсорных возможностей и горизонта прогнозирования событий, а также обеспечить контроль участников дорожного движения и их влияния на обеспечение безопасности в рамках локальной транспортной ситуации.
IV
ПНСТ 824—2023
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
ДИНАМИЧЕСКАЯ ЦИФРОВАЯ КАРТА ДОРОЖНОГО ДВИЖЕНИЯ
Архитектура динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств
Intelligent transport systems. Dynamic digital road traffic map. The architecture of the dynamic digital road traffic map for the movement of highly automated vehicles
Срок действия — с 2024—06—01 с правом досрочного применения до 2027—06—01
1 Область применения
Настоящий стандарт распространяется на интеллектуальные транспортные системы и устанавливает требования к архитектуре динамической цифровой карты дорожного движения для обеспечения движения высокоавтоматизированных транспортных средств. Архитектура динамической цифровой карты дорожного движения разработана с учетом обеспечения безопасности дорожного движения и повышения эффективности транспортно-дорожного комплекса.
Настоящий стандарт распространяется на способы автоматизированного движения различных классов транспортных средств, которые для принятия решений о траектории и параметрах движения используют высокоточное позиционирование, бортовые сенсоры и системы, обеспечивающие передачу данных по технологиям V2X, применяемым на всех типах дорог.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 32965 Дороги автомобильные общего пользования. Методы учета интенсивности движения транспортного потока
ГОСТ 33062 Дороги автомобильные общего пользования. Требования к размещению объектов дорожного и придорожного сервиса
ГОСТ Р 51256—2018 Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования
ГОСТ Р 52282—2004 Технические средства организации дорожного движения. Светофоры дорожные. Типы и основные параметры. Общие технические требования. Методы испытаний
ГОСТ Р 52289 Технические средства организации дорожного движения. Правила применения дорожных знаков, разметки, светофоров, дорожных ограждений и направляющих устройств
ГОСТ Р 52290—2004 Технические средства организации дорожного движения. Знаки дорожные. Общие технические требования
ГОСТ Р 58823 Автомобильные транспортные средства. Системы автоматизации управления движением. Классификация и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам
Издание официальное
1
ПНСТ 824—2023
ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 автоматизированная система вождения: Конструктивно обособленное и функционально законченное устройство, включающее программно-аппаратные средства, осуществляющие управление транспортным средством в пределах конкретной среды штатной эксплуатации.
3.2 высокоавтоматизированное транспортное средство: Транспортное средство, оснащенное автоматизированной системой вождения, которая действует в пределах конкретной среды штатной эксплуатации применительно к некоторым или всем поездкам без необходимости вмешательства человека в качестве запасного варианта обеспечения безопасности дорожного движения.
3.3 кооперативная интеллектуальная транспортная система: Тип интеллектуальной транспортной системы, технологическая основа которой базируется на технологиях V2X.
3.4 динамическая цифровая карта дорожного движения: Часть интеллектуальной транспортной системы, основанная на геоинформационной модели дороги и дорожного движения, обеспечивающая в полностью автоматическом режиме повышение ситуационной осведомленности подключенных транспортных средств различной степени автоматизации.
3.5 ситуационная осведомленность высокоавтоматизированного транспортного средства: Процесс восприятия ВАТС дорожного движения и среды штатной эксплуатации во времени и пространстве, сопровождаемый пониманием их значения и прогнозированием изменений их состояния в ближайшем будущем.
3.6 подключенное транспортное средство: Транспортное средство, способное обмениваться данными с другими транспортными средствами, интеллектуальной дорожной инфраструктурой и информационно-телекоммуникационными сетями.
3.7 среда штатной эксплуатации: Климатические условия, время суток, а также дорожно-транспортные, инфраструктурные, погодные и другие условия, для работы в которых предназначена автоматизированная система вождения.
3.8 уровень автоматизации: Оценка способности автоматизированной системы вождения самостоятельно справляться с управлением транспортным средством в различных дорожно-транспортных ситуациях в конкретной среде штатной эксплуатации.
Примечание — Уровни автоматизации ВАТС соответствуют ГОСТ Р 58823.
4 Обозначения и сокращения
В настоящем стандарте применены следующие обозначения и сокращения:
V2X — связь между транспортным средством и другим объектом (vehicle-to-everything);
АГЗС — автомобильная газозаправочная станция;
АЗС — автомобильная заправочная станция;
АСВ — автоматизированная система вождения;
ВАТС — высокоавтоматизированное транспортное средство;
ГАНС — государственная автоматизированная информационная система;
ГНСС — глобальные навигационные спутниковые системы;
ДТП — дорожно-транспортное происшествие;
ДЦКДД — динамическая цифровая карта дорожного движения;
ИТС — интеллектуальная транспортная система;
2
ПНСТ 824—2023
К-ИТС — комплексная интеллектуальная транспортная система;
ЛП ИТС — локальный проект интеллектуальной транспортной системы;
ПГМ — противогололедный материал;
ПДД — правила дорожного движения;
ПО — программное обеспечение;
СВПД — система высокоточного позиционирования на дороге;
СШЭ — среда штатной эксплуатации;
ТП — транспортный поток;
ТС — транспортное средство;
УДС — улично-дорожная сеть;
УВЭОС — устройство вызова экстренных оперативных служб;
ЦОД — центр обработки данных;
ЧС — чрезвычайная ситуация;
САМ — сервис сообщений кооперативного взаимодействия (cooperative awareness message);
DENM — сервис децентрализованных сообщений информирования об условиях движения (decentralized environmental notification message);
ETSI — Европейский институт по стандартизации в области телекоммуникаций (european telecommunication standards institute);
LDM — локальная динамическая карта (local dynamic map);
POTI — сервис предоставления высокоточной позиции и времени (position and time);
PPP — глобальное позиционирование высокой точности (precise point positioning);
RTK — кинематика реального времени (real time kinematic).
5 Общие положения
ДЦКДД является системой управления, интегрированной в ИТС, основной целью которой является повышение эффективности и обеспечение безопасного функционирования ВАТС на дорогах общего пользования.
Критерии безопасного функционирования ВАТС достигаются путем выполнения следующих задач:
- обеспечение ситуационной осведомленности ВАТС;
- обеспечение оптимального перераспределения ТП ВАТС;
- управление ВАТС в различных нештатных для АСВ ситуациях;
- решение конфликтных ситуаций на стратегическом уровне управления ТП ВАТС;
- поддержка реализации автоматической системы управления дорожным движением для ВАТС, эксплуатирующихся в беспилотном режиме;
- удаленный доступ пользователей ВАТС к пользовательским сервисам ДЦКДД в режиме реального времени и в автономном режиме.
6 Физическая архитектура динамической цифровой карты дорожного движения
6.1 Архитектура предоставления сервисов ДЦКДД должна состоять из компонентов, которые находятся в постоянной непрерывной связи друг с другом (см. рисунок 1).
6.2 ВАТС должны направлять запрос в национальный сервис ДЦКДД для ВАТС по протоколу 1.
6.3 Национальный сервис ДЦКДД для ВАТС передает информацию в ЛП ИТС, в зоне покрытия которого находится ВАТС по протоколу 1.
6.4 ДЦКДД должна находиться в постоянном обмене информацией с ВАТС, осуществляемом по протоколу взаимодействия ДЦКДД — ВАТС (см. рисунок 1, позиция 2).
3
ПНСТ 824—2023
6.5 Синхронизация данных, а также их обмен между ближайшими ДЦКДД происходят по протоколу взаимодействия ДЦКДД — ДЦКДД (см. рисунок 1, позиция 3).
6.6 От элементов дорожной инфраструктуры в ДЦКДД информация поступает по протоколу взаимодействия ДЦКДД — дорожная инфраструктура (см. рисунок 1, позиция 4).
6.7 Требования к информационному и программному компонентам ДЦКДД
6.7.1 Информационный компонент должен включать описание информационной и логической моделей ДЦКДД, состав слоев данных, систему классификации и кодирования информации, протоколы информационного взаимодействия и форматы данных.
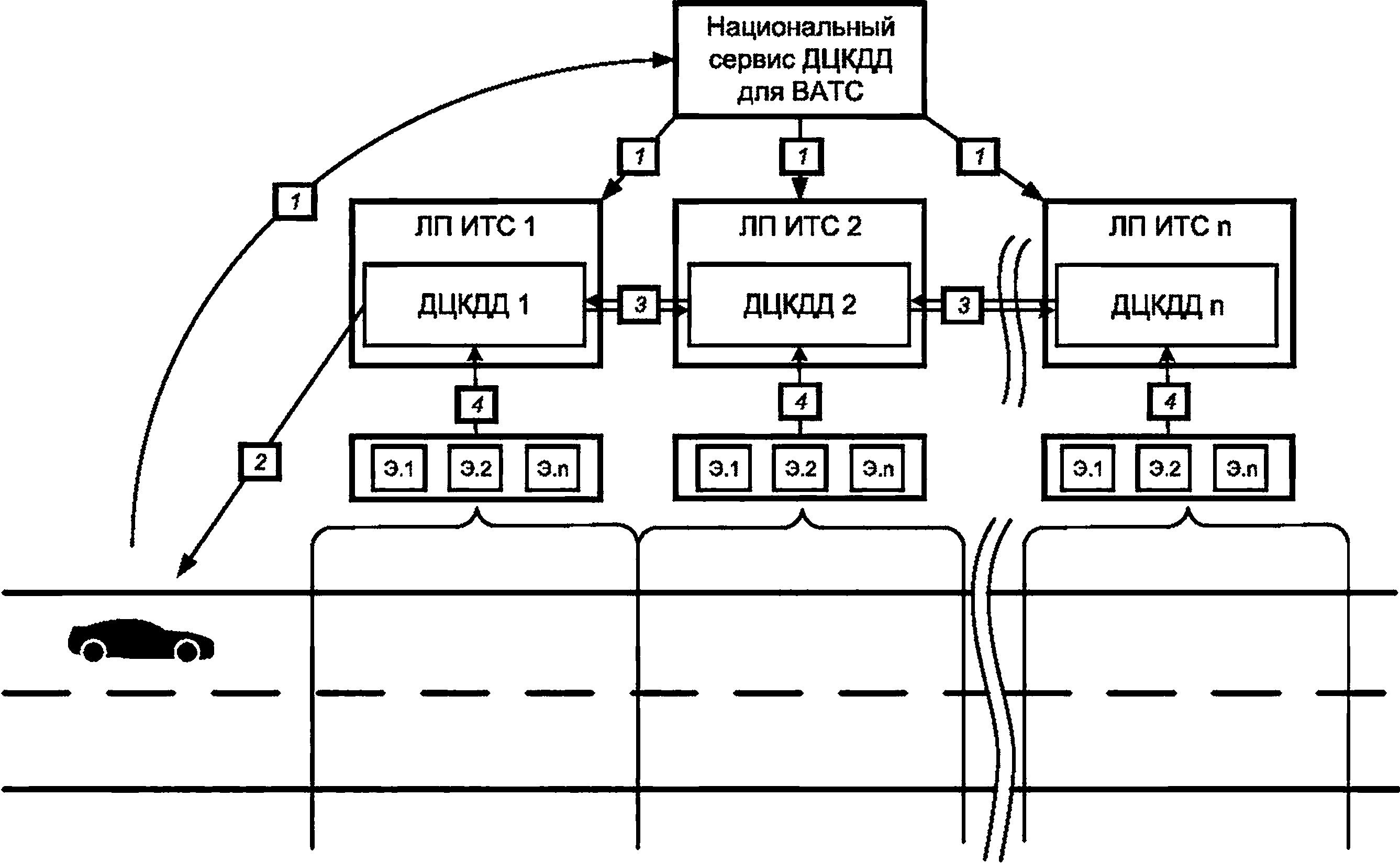
Э — элемент ДЦКДД; 1 — протокол взаимодействия «ВАТС — национальный сервис ДЦКДД» для BATC; 2 — протокол взаимодействия «ВАТС — ДЦКДД»; 3 — протокол взаимодействия «ДЦКДД — ДЦКДД»; 4 — протокол взаимодействия «ДЦКДД — дорожная инфраструктура»
Рисунок 1 — Архитектура предоставления сервисов ДЦКДД
6.7.2 Информационный компонент реализуется в виде базы данных ДЦКДД и программных средств, обеспечивающих решение следующих задач:
- актуальное наполнение данных в централизованном хранилище;
- распределенное копирование частей слоев данных ДЦКДД по инфраструктурным элементам ДЦКДД, расположенным на участках автомобильных дорог;
- информационное взаимодействие инфраструктурных элементов ДЦКДД с ВАТС.
6.7.3 Программный компонент должен включать в себя средства ведения базы данных ДЦКДД, сервисы для публикации слоев данных ДЦКДД и модули для формирования и передачи необходимой информации по участку автомобильной дороги для использования локально в ВАТС.
6.7.4 Программный компонент реализуется в виде комплекта ПО для сервера и для клиента.
6.7.5 Серверное ПО может быть установлено в центре обработки данных ЛП ИТС и должно состоять из базы данных ДЦКДД и программных средств поддержания ее информационных слоев в актуальном состоянии.
4
ПНСТ 824—2023
6.7.6 Бортовые вычислительные комплексы в составе ВАТС могут использовать получаемую от ДЦКДД информацию для управления движением по автомобильным дорогам, включенным в контур ДЦКДД.
6.8 Требования к формированию динамической цифровой карты дорожного движения
6.8.1 ДЦКДД должна включать в себя базу пространственных данных структурных элементов улично-дорожной сети и автомобильной дороги, элементов интеллектуальных транспортных систем и кооперативных интеллектуальных транспортных систем, других участников дорожного движения, препятствий, а также обезличенных данных ВАТС.
6.8.2 Цифровая информация о дороге и условиях движения содержит сведения о следующих параметрах:
- конструктивных элементах дороги (осевая линия, кромка проезжей части, бровка земляного полотна, полосы движения, разделительная полоса, обочина, бордюры);
- дорожной разметке, дорожных знаках и светофорах;
- объектах придорожной инфраструктуры и сервиса;
- высокоточном дорожном графе;
- качестве дорожного покрытия (материал, наличие колейности, выбоин и иных дефектов);
- характеристиках дороги (продольные уклоны, радиусы поворота, ограничения по высоте, ограничения по габаритам);
- текущих условиях движения (ДТП, заторы, ремонтные работы).
7 Требования к физической и функциональной архитектурам динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств
7.1 Обобщенная функциональная и физическая архитектура ДЦКДД приведена в приложении А (рисунок А.1).
7.2 Необходимо, чтобы ДЦКДД выполняла следующие функции:
- построение оптимального маршрута движения с учетом минимального расстояния от точки старта к пункту назначения, выбор маршрута с учетом минимального времени проезда транспортного узла и перегона;
- перераспределение ТП ВАТС;
- повышение ситуационной осведомленности ВАТС;
- обеспечение информационного обмена с ВАТС по защищенным каналам связи, в том числе с использованием шифрования;
- построение условий движения;
- синхронизация управляющих воздействий;
- хранение, обработка данных статических и динамических объектов;
- расчет оптимальных и безопасных параметров движения (выбор траектории проезда локального участка, скоростных характеристик проезда участка, удержание бокового интервала и дистанции до впередиидущих ТС в полосе).
7.3 Построение оптимального маршрута движения включает:
- выбор маршрута с учетом минимального расстояния от точки старта к пункту назначения;
- выбор маршрута с учетом наименьших финансовых затрат;
- выбор маршрута с учетом минимального времени проезда транспортного узла и перегона.
7.4 Расчет оптимальных и безопасных параметров движения включает:
- выбор траектории проезда локального участка;
- выбор скоростных характеристик проезда участка;
- выбор и удержание дистанции до впередиидущих ТС в полосе;
- выбор и удержание боковой дистанции.
7.5 Перераспределение транспортных потоков включает:
- динамическое распределение ВАТС по УДС с учетом загрузки в момент времени;
- построение прогнозных данных загрузки узлов и перегонов.
5
ПНСТ 824—2023
7.6 Реконструкция дорожной сцены ВАТС включает:
- построение полномасштабной карты локальной местности с учетом всех статических объектов путем объединения данных, поступающих от различных ВАТС;
- формирование прогнозной модели развития дорожной сцены.
7.7 Обеспечение информационной безопасности ВАТС включает:
- профилактику устранения уязвимостей и предотвращения угроз;
- оповещение о несанкционированном доступе к структурным элементам ДЦКДД и ВАТС;
- мониторинг и контроль средств информационной защиты;
- защиту от внутренних угроз;
- защиту от внешних угроз.
7.8 Построение условий движения включает:
- сбор данных о параметрах движения функционирующих в границах ЛП ИТС ВАТС;
- построение прогнозной модели условий движения внутри локального проекта.
7.9 Синхронизация управляющих воздействий включает корректировку тактических решений в зависимости от текущего режима работы подсистем внутри ЛП ИТС.
7.10 Хранение и обработка данных статических и динамических объектов включают:
- сбор данных о местоположении и характеристиках объектов;
- обработку и хранение данных.
7.11 Повышение ситуационной осведомленности ВАТС включает:
- формирование расширенного пакета данных, предназначенного для дополнительного информационного обеспечения и принятия более гибких решений;
- обеспечение информационного обмена между ВАТС и подключенными ТС.
8 Требования к средам штатной эксплуатации
8.1 Требования к первому типу СШЭ
8.1.1 В процессе своего движения ВАТС полагается только на бортовые сенсоры, внутренние цифровые карты самого ВАТС и встроенные алгоритмы обработки получаемых данных.
8.1.2 Допускается отсутствие информационной поддержки со стороны интеллектуальной дорожной инфраструктуры.
8.1.3 ДЦКДД может не функционировать.
8.1.4 При эксплуатации ВАТС в данной СШЭ скоростные параметры ВАТС следует ограничить максимальным значением динамического габарита, зависящего от расстояния остановочного пути, меньшего, чем максимальная граница уверенного распознавания объектов имеющимися сенсорами с учетом возможного появления других участников дорожного движения.
8.1.5 Все эксплуатируемые ВАТС в данной СШЭ необходимо подключить к ГАНС «ЭРА-ГЛОНАСС».
8.2 Требования ко второму типу СШЭ
8.2.1 ВАТС в процессе своего движения полагается на бортовые сенсоры и, как минимум, на актуальную цифровую карту местности высокого разрешения.
8.2.2 Информационную поддержку со стороны интеллектуальной дорожной инфраструктуры следует осуществлять за счет базовых сервисов ИТС, предоставления высокоточной ДЦКДД и сервиса СВПД.
8.2.3 Архитектура ДЦКДД должна включать слой «Высокоточные данные УДС и дороги».
8.2.4 В архитектуре ДЦКДД допускается наличие слоя «Данные элементов ИТС».
8.2.5 При эксплуатации внутри данной СШЭ АСВ ВАТС должна прогнозировать возможность появления помех и регулировать скорость движения ВАТС исходя из особенностей наличия и расположения объектов на карте и общей информации для повышения ситуационной осведомленности.
8.2.6 Все эксплуатируемые ВАТС в данной СШЭ необходимо подключить к ГАНС «ЭРА-ГЛОНАСС».
6
ПНСТ 824—2023
8.3 Требования к третьему типу СШЭ
8.3.1 ВАТС в процессе своего движения полагается на бортовые сенсоры, актуальную цифровую карту местности высокого разрешения и обеспечение сетевого взаимодействия V2X ВАТС с интеллектуальной дорожной инфраструктурой и другими участниками дорожного движения.
8.3.2 Информационная поддержка со стороны интеллектуальной дорожной инфраструктуры осуществляется за счет существующих сервисов ЛП ИТС, постоянного обмена данными с ДЦКДД, предоставления сервисов ДЦКДД и сервиса СВПД.
8.3.3 Архитектура ДЦКДД включает все слои, указанные в разделе 9.
8.3.4 При эксплуатации в данной СШЭ АСВ ВАТС должна иметь полную картину дорожной ситуации с прогнозом развития на необходимый период.
8.3.5 Безопасное движение возможно осуществлять с максимальной скоростью, которую обеспечивает дорожная инфраструктура и регламентируют ПДД.
8.3.6 Все эксплуатируемые ВАТС в данной СШЭ необходимо подключить к ГАНС «ЭРА-ГЛОНАСС».
9 Структура динамической цифровой карты дорожного движения
9.1 Структура ДЦКДД включает следующие элементы и слои:
а) высокоточные данные УДС и дороги:
1) группа слоев «Исходные данные элементов дороги и геодезических замеров»:
- слой «Облако точек результатов лазерного сканирования»,
- слой «Данные геодезических замеров»,
- слой «Геопривязанные обработанные георадарные профили»,
- слой «Геопривязанные фотоматериалы»,
- слой «Результаты диагностики и оценки технического состояния дорог»,
2) группа слоев «Высокоточная карта»:
- слой «Фоновые данные»,
- слой «Цифровая картографическая подложка»,
- слой «Дорога»,
- слой «Разметка»,
- слой «Дорожные знаки»,
- слой «Светофоры»,
- слой «Объекты придорожной инфраструктуры и сервиса»,
- слой «Граф дорог»,
3) слой «Траектории движения ВАТС»;
б) данные элементов ИТС;
в) данные элементов К-ИТС;
г) высокоточные обезличенные данные ВАТС;
д) высокоточная информация о других участниках дорожного движения и препятствиях.
9.2 Требования к высокоточным данным улично-дорожной сети и дороги
9.2.1 Требования к группе слоев «Исходные данные элементов дороги и геодезических замеров»
9.2.1.1 Требования к слою «Облако точек результатов лазерного сканирования»
9.2.1.1.1 Облако точек представляет собой совокупность точек поверхностей объектов на местности, в том числе:
- конструктивные элементы сооружения (кромки проезжей части, покрытие автомобильной дороги, бровки и откосы земляного полотна, бордюры, разделительные полосы, прикромочные и водосбросные лотки и др.);
- объекты придорожной инфраструктуры;
- элементы обустройства (дорожные знаки и ограждения, опорные конструкции технических средств организации дорожного движения, автоматизированных систем управления дорожным движением, опоры наружного освещения, стационарные технические средства автоматической фотовидеофиксации и др.);
- водопропускные трубы (наружные элементы);
7
ПНСТ 824—2023
- сопутствующие мосты и путепроводы (за исключением подпролетной части);
- сопутствующие и пересекаемые надземные линии электропередач, пересечения с железными и автомобильными дорогами на одном и разных уровнях (за исключением проезжей части путепроводов на верхних уровнях при отсутствии съездов к ним), пешеходные переходы в разных уровнях (наружные элементы);
- пункты взимания платы;
- пункты весогабаритного контроля.
9.2.1.1.2 Допускается представление результатов лазерного сканирования в форматах LAS/LAZ или форматах, позволяющих без использования стороннего ПО и потери данных формировать LAS/LAZ-файлы.
9.2.1.1.3 Необработанное облако точек представляют также в исходном (внутреннем) формате системы мобильного лазерного сканирования с описанием данного внутреннего формата.
9.2.1.2 В слой «Данные геодезических замеров» входят данные геодезических замеров, формирующих перечень точек земной поверхности в границах локального проекта ИТС, на основании которых строятся структурные линии дороги и определяются геометрические параметры дорожной инфраструктуры.
9.2.1.3 Требования к слою «Геопривязанные обработанные георадарные профили»
9.2.1.3.1 Слой «Геопривязанные обработанные георадарные профили» содержит результаты гео-радарной съемки (георадарные профили и файлы координатной привязки), которые необходимо представить в открытых обменных форматах SEG-Y (или аналогичных открытых форматах, позволяющих без потери и снижения качества данных выполнять их конвертацию), а также исходном (внутреннем) формате георадара.
9.2.1.3.2 Дополнительные текстовые материалы представляют в формате pdf и редактируемом формате (doc, docx, txt или аналогичных).
9.2.1.3.3 Элементы ДЦКДД, содержащие векторизованную информацию, представляют в форматах dwg, dgn или shp в масштабе 1:1.
9.2.1.4 Требования к слою «Геопривязанные фотоматериалы»
9.2.1.4.1 Слой «Геопривязанные фотоматериалы» содержит геопривязанные фотоматериалы, которые используются при построении карты местности с отображением ключевых объектов в растровом формате данных.
9.2.1.4.2 Допускается применение следующих форматов файла ориентирования фотоснимков для каждого файла фотосъемки: jpeg (jpg), tiff, bmp, png.
9.2.1.4.3 В дополнение необходимо предоставить файлы ориентирования фотоснимков и координатной привязки в текстовом формате для обеспечения возможности совмещения фотопанорам и облаков точек.
9.2.1.5 Требования к слою «Результаты диагностики и оценки технического состояния дорог»
9.2.1.5.1 Слой «Результаты диагностики и оценки технического состояния дорог» содержит результаты оценки технического состояния автомобильных дорог (диагностики), которые необходимо представить в качестве точечных, линейных либо площадных объектов, с необходимыми атрибутами в формате shp (или аналогичном формате) с координатной привязкой.
9.2.1.5.2 Слой «Результаты диагностики и оценки технического состояния дорог» следует использовать при построении карты местности с отображением дефектов дорожного полотна.
9.2.2 Требования к группе слоев «Высокоточная карта»
9.2.2.1 Требования к слою «Фоновые данные»
9.2.2.1.1 Слой «Фоновые данные» содержит фоновые данные, являющиеся пространственными объектами в виде совокупности пикселей с присвоением класса объекта.
9.2.2.1.2 Растровое представление позиционирует объекты, указывая их положение в соответствующей прямоугольной матрице единообразно для всех типов пространственных объектов.
9.2.2.2 Требования к слою «Цифровая картографическая подложка»
9.2.2.2.1 Слой «Цифровая картографическая подложка» содержит изображения, на которых в тематическом виде наглядно отражены транспортные заторы, ДТП и иные оперативные события.
9.2.2.2.2 Цифровая картографическая подложка может использоваться для визуального отображения текущей транспортной ситуации.
9.2.2.3 Слой «Дорога» включает следующие объекты:
- линию кромки дороги;
- линию оси дороги;
8
ПНСТ 824—2023
- дорожный буфер;
- полосу движения;
- дополнительную полосу движения;
- неукрепленную часть обочины;
- обстановку дороги, указатели;
- проезжую часть;
- полосу безопасности;
- световозращатели кд-6;
- сигнальный столбик;
- укрепленную часть обочины;
- полосу отвода;
- дорожное полотно;
- земляное полотно;
- кювет;
- тротуар;
- велодорожку;
- кромку проезжей части;
- бровку земляного полотна;
- разделительную полосу;
- границу проезжей части с твердым покрытием с бордюрным камнем;
- границу проезжей части с твердым покрытием;
- границу проезжей части без капитального покрытия;
- границы проезжей части в местах пересечений и примыканий, в том числе со сложной конфигурацией;
- односторонний фонарь;
- двусторонний фонарь;
- пешеходное ограждение;
- дорожное ограждение;
- опоры освещения;
- опоры технических средств организации дорожного движения;
- опоры автоматизированных средств управления дорожным движением.
9.2.2.4 Перечень объектов, входящих в слой «Разметка» должен соответствовать ГОСТ Р 51256—2018 (приложение А).
9.2.2.5 Перечень объектов, входящих в слой «Дорожные знаки» должен соответствовать ГОСТ Р 52290—2004 (приложение А).
9.2.2.6 Перечень объектов, входящих в слой «Светофоры», должен соответствовать ГОСТ Р 52282—2004 (приложение А).
9.2.2.7 Слой «Объекты придорожной инфраструктуры и сервиса» включает следующие объекты придорожной инфраструктуры (по ГОСТ 33062):
- остановочную полосу, площадку для кратковременной остановки ТС;
- остановочный пункт маршрутных ТС;
- площадку отдыха;
- обзорную площадку;
- устройства аварийно-вызывной связи;
- парковки;
- автостоянку;
- автостанцию, автовокзал;
- гостиницу (мотель), кемпинг;
- станцию технического обслуживания;
- пункты питания;
- пункты мойки;
- средства наружной рекламы;
- многофункциональный комплекс сервиса;
- АЗС и АГЗС;
- зоны отдыха.
Примечание — К объектам придорожной инфраструктуры также следует отнести мачты освещения.
9
ПНСТ 824—2023
9.2.2.8 Требования к слою «Граф дорог»
9.2.2.8.1 Граф дорог представляет собой цифровую векторную карту, состоящую из топологически связанных ребер (дуг) и вершин (узлов), местоположение и свойства которых с заданной точностью и полнотой передают организацию движения наземного транспорта по проезжей части.
9.2.2.8.2 К объектам слоя «Граф дорог» следует относить следующие элементы:
- рамку исходной карты;
- дугу сети;
- узел сети;
- маршрут;
- ошибку сети;
- дугу сети (одностороннюю);
- осевую линию полосы движения;
- тип способа получения данных;
- перестроение;
- разгон;
- торможение;
- стоп;
- старт;
- финиш.
9.2.3 Требования к слою «Траектории движения ВАТС»
9.2.3.1 Основное назначение слоя «Траектория движения ВАТС» —построение плановой траектории движения ВАТС из точки А в точку Б.
9.2.3.2 Структура и правила формирования данного слоя должны учитывать возможности построения траектории движения ВАТС с детализацией до полосы движения.
9.2.3.3 Дополнительно к построению геоинформационной модели каждой из полос движения автомобильной дороги, слой траекторий движения ВАТС должен однозначно описывать области возможного перестроения ВАТС между полосами с учетом имеющейся дорожной разметки.
9.2.3.4 Исходя из требований построения маршрута из начального в пункт назначения, слой траекторий движения ВАТС описывает также зоны регулируемых и нерегулируемых перекрестков, а также зону переходно-скоростной полосы.
9.2.3.5 Требования к свойствам объектов слоя
9.2.3.5.1 Любой слой УДС геоинформационной системы, к которому предъявляются требования к построению маршрута с учетом заданных критериев, должен описываться структурой «сильно связный ориентированный граф».
9.2.3.5.2 Из каждой вершины ориентированного графа с направленными дугами должна быть возможность проложить маршрут в любую другую вершину, то есть вершины графа взаимно достижимы.
9.2.3.5.3 Для построения оптимального маршрута движения ВАТС из точки отправления в точку назначения требуется возможность задавать весовые коэффициенты ребрам графа, являющимся участками полос движения УДС.
9.2.3.5.4 Граф, составляющий слой траектории движения ВАТС должен быть взвешенным.
9.2.3.5.5 Весовые коэффициенты пересчитывают с учетом изменяющихся во времени характеристик участка дороги и каждой из ее полос движения, которые соответствующим образом описываются в слое «Траектория движения ВАТС».
9.2.3.5.6 Поскольку слой «Траектория движения ВАТС» является в определенном смысле моделью реальной УДС, необходимо, чтобы данная модель адекватно описывала пространственный объект «полоса движения», а именно:
- содержала необходимый и достаточный набор атрибутов информационной модели;
- содержала актуальные значения каждого из атрибутов, корректно ее описывающие: размеры полосы, тип разметки полосы с обеих сторон, широту и долготу множества географических точек, его описывающих, и т. д.
9.2.3.5.7 Каждый элемент слоя «Траектория движения ВАТС» рассчитывают в соответствии с параметрами слоев «Дорога» и «Разметка» для исключения рассогласованности данных между указанными слоями.
9.2.3.6 Структура слоя «Траектория движения ВАТС»
9.2.3.6.1 Слой «Траектория движения ВАТС» описывают как ориентированный сильно связный граф.
10
ПНСТ 824—2023
9.2.3.6.2 Основная структура для описания слоя задается множеством узлов (вершин графа) и множеством пар узлов, задающих дуги графа.
9.2.3.6.3 Дуга графа описывает середину полосы движения на ее прямолинейном участке.
9.2.3.6.4 Ориентированный взвешенный граф следует формально описывать как D = (V, Е), который состоит из множества V, элементы которого называются вершинами, и множества Е упорядоченных пар вершин: и, v е Е.
9.2.3.6.5 При переходе от описания графа к предметной области, то есть к описанию слоя «Траектория движения ВАТС», необходимо получить следующую информационную модель:
Объект «Узел траектории движения ВАТС» описывается следующим набором атрибутов (см. таблицу 1).
Таблица 1 — Атрибуты объекта «Узел траектории движения ВАТС»
Название атрибута | Тип данных | Примечание |
Географическая широта | Число с двойной точностью | Точность вычисления координат: 10 мм |
Географическая долгота | Число с двойной точностью | Точность вычисления координат: 10 мм |
Географическая высота над уровнем моря | Число с двойной точностью | Точность вычисления координат: 10 мм |
Объект «Дуга траектории движения ВАТС» описывается следующим набором атрибутов (см. таблицу 2).
Таблица 2 — Атрибуты объекта «Дуга траектории движения ВАТС»
Название атрибута | Тип данных | Примечание |
Код первого узла по ходу движения | Целое число | — |
Код второго узла по ходу движения | Целое число | — |
Код типа дорожной разметки (или опорной линии дороги) слева | Целое число | См. типы дорожной разметки и опорных линий дороги |
Код типа дорожной разметки (или опорной линии дороги) справа | Целое число | См. типы дорожной разметки и опорных линий дороги |
Длина дуги (пути) | Число с двойной точностью | Единица измерения: метр |
Код типа дуги | Целое число | Принимаемые значения: «полоса движения», «маневровый участок перестроения на другую дорогу», «маневровый участок перестроения на соседнюю полосу движения» |
Скоростное ограничение в первом узле | Целое число | В соответствии с правилами дорожного движения, м/с |
Скоростное ограничение во втором узле | Целое число | В соответствии с правилами дорожного движения, м/с |
Динамическое скоростное ограничение в первом узле | — | В соответствии с динамически изменяющейся ситуацией, м/с |
Динамическое скоростное ограничение во втором узле | — | В соответствии с динамически изменяющейся ситуацией, м/с |
Рекомендуемая скорость в первом узле | Целое число | Единица измерения: м/с |
Рекомендуемая скорость во втором узле | Целое число | Единица измерения: м/с |
Ширина полосы в первом узле | — | Единица измерения: метр |
Ширина полосы во втором узле | — | Единица измерения: метр |
Код участка опорной линии дороги | Целое число | — |
11
ПНСТ 824—2023
9.2.3.7 Правила формирования дуги типа «маневровый участок перестроения на другую дорогу»
В большинстве случаев конфигурация дороги подразумевает наличие расширения полосы, крайней к повороту. Если на автомобильной дороге предусмотрена переходно-скоростная полоса, которая обеспечивает более комфортное и безопасное перестроение с одной дороги на другую, то указанный участок полосы движения описывается соответствующим упорядоченным множеством дуг, которые выходят из узла, принадлежащего полосе движения исходной дороги, и заканчиваются узлом, принадлежащим полосе движения дороги, на которую производится перестроение (см. рисунок 2).
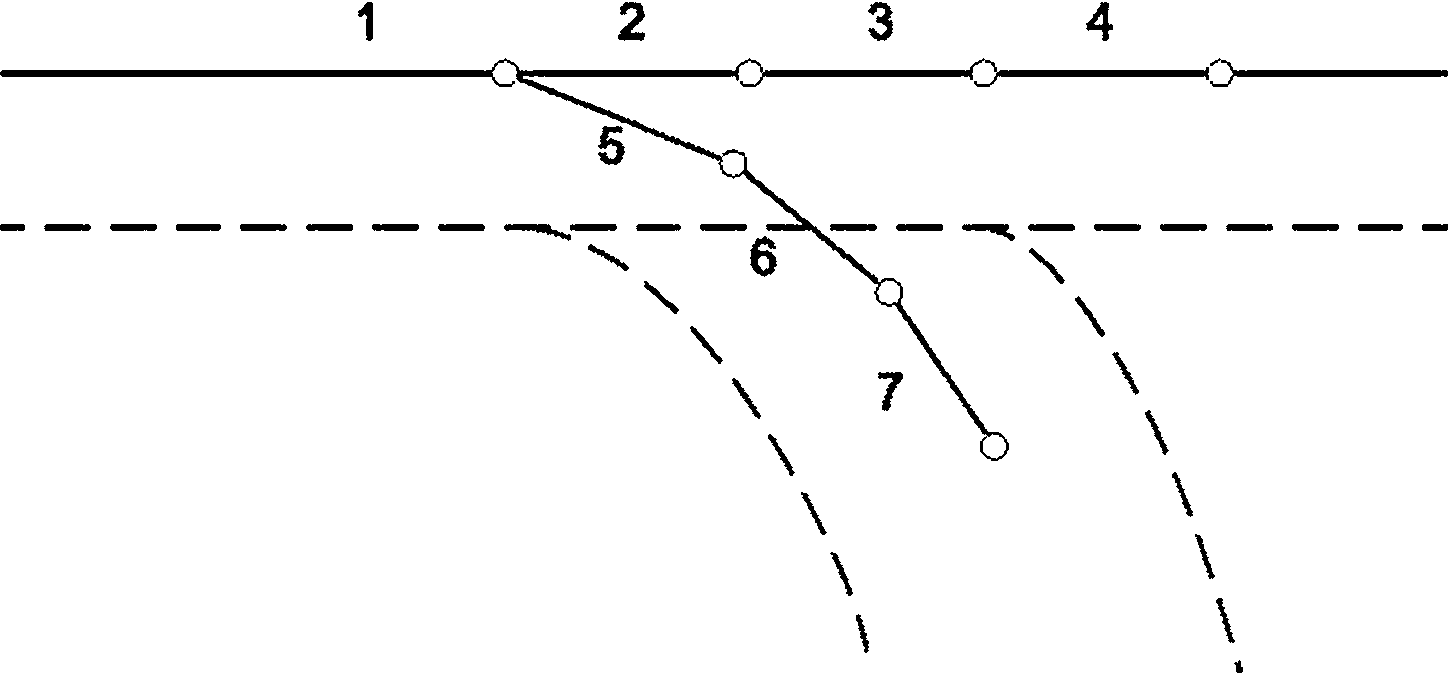
Рисунок 2 — Пример формирования дуг 5, 6 типа «маневровый участок» при соединении основной дороги и примыкающей к ней
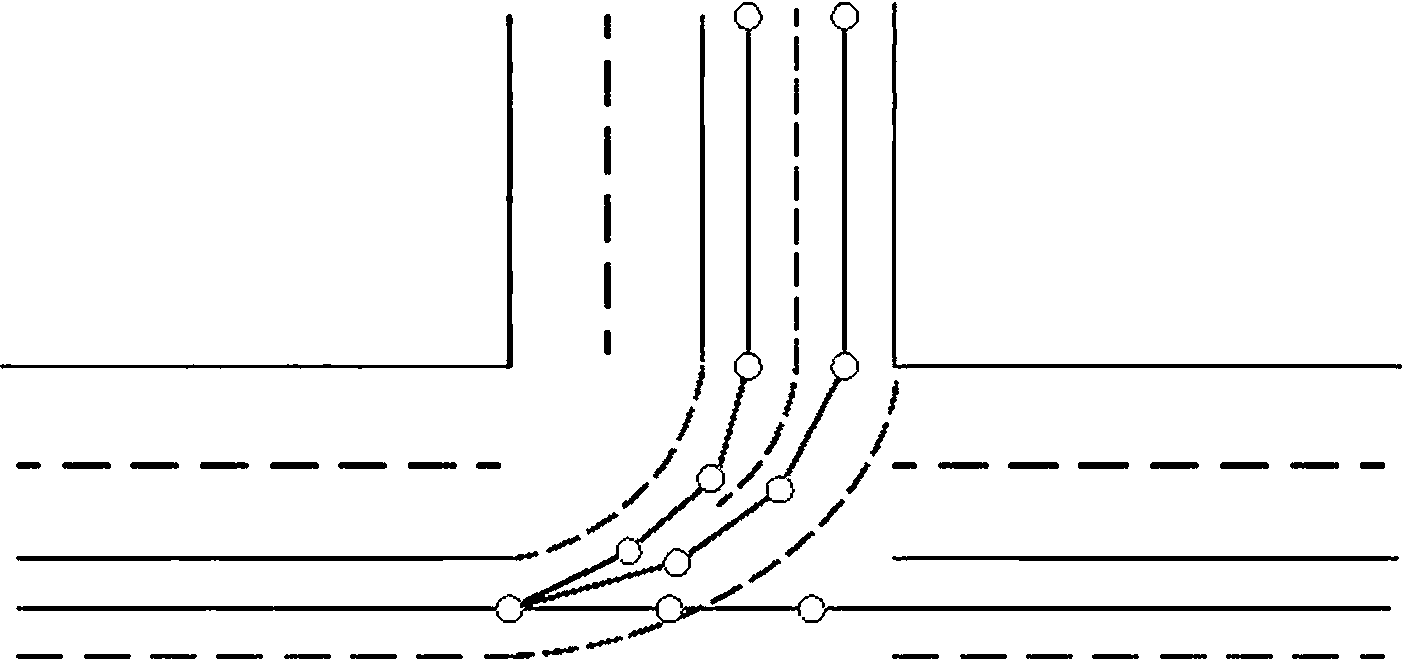
Далее представлен пример формирования дуг, описывающих варианты траектории движения на регулируемом перекрестке (см. рисунок 3).
I I
Рисунок 3 — Пример формирования дуг типа «маневровый участок» при проезде через перекресток (левый поворот)
При построении оптимального пути из пункта отправления в пункт назначения с точностью до полосы движения необходимо иметь однозначное описание мест перестроения между полосами при прокладке маршрута как в отложенном режиме, так и в динамике при маневрировании.
Каждому участку прерывистой разметки соответствуют две дуги типа «маневровый участок перестроения на соседнюю полосу движения», располагающиеся в самом начале и в самом конце прерывистой линии разметки. Для каждой из двух соседних полос, для которых разрешено перестроение, дуги, которые обозначают начало и окончание прерывистой линии, строятся отдельно.
12
ПНСТ 824—2023
9.2.3.8 Задание дуги, описывающей начало прерывистой линии разметки
Дуга, характеризующая маневровый участок перестроения на соседнюю полосу движения, начинается в узле, который характеризует начало прерывистой линии разметки с правой или с левой стороны исходной полосы движения.
Дуга, характеризующая маневровый участок перестроения на соседнюю полосу движения, заканчивается в узле, который располагается на целевой полосе дальше по ходу движения, чем узел, из которого выходит маневровый участок перестроения на соседнюю полосу движения.
Маневровый участок перестроения на соседнюю полосу движения описывается одной (прямолинейной) дугой графа. На рисунке 4 приведен пример дуги, задающей начало зоны перестроения между соседними полосами движения.
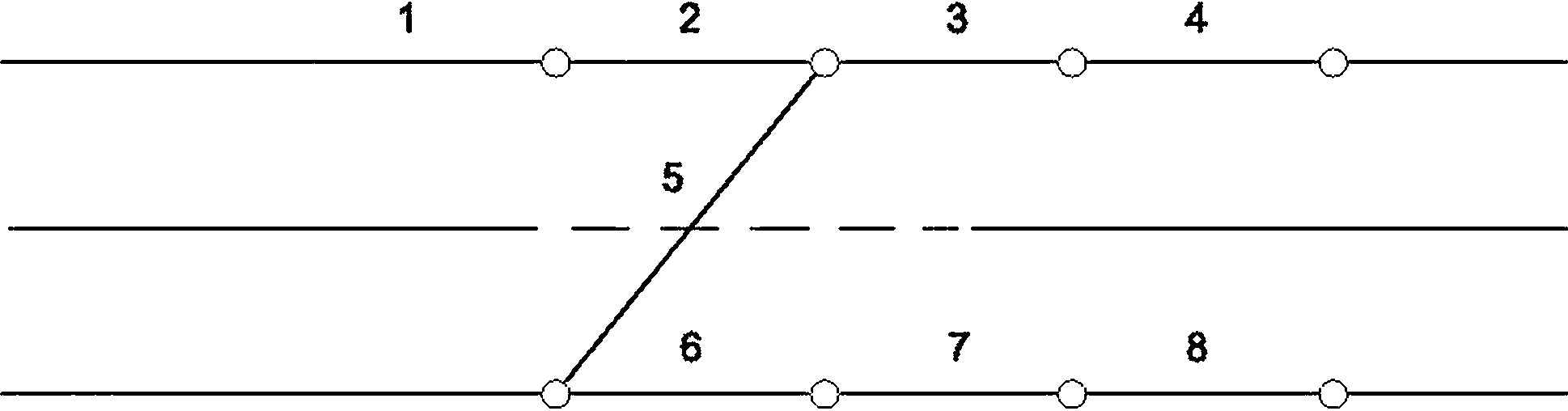
Рисунок 4 — Пример дуги 5, задающей начало зоны перестроения между соседними полосами движения
9.2.3.9 Задание дуги, описывающей окончание прерывистой линии разметки
Окончание зоны возможного перестроения характеризуется дополнительной парой дуг (для прерывистой разметки в обе стороны), задающих траекторию перестроения с одной полосы на другую. Построение дуги, характеризующей маневровый участок перестроения на соседнюю полосу движения перед началом непрерывной линии разметки, выполняют в обратном порядке — против направления движения.
На рисунке 5 приведен пример дуги, задающей траекторию перестроения между полосами перед началом участка полосы со сплошной линией разметки.
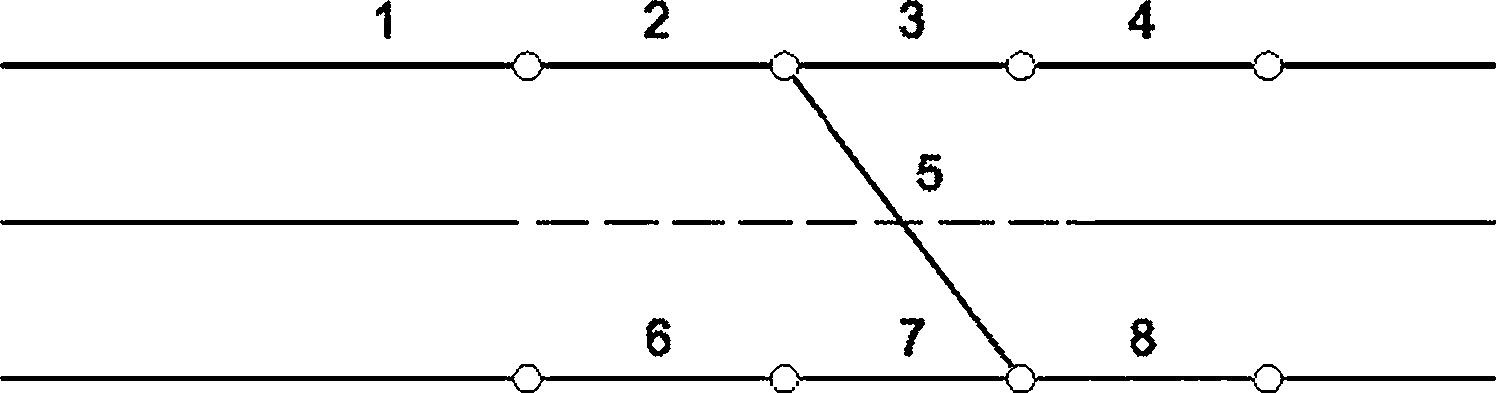
Рисунок 5 — Пример маневровых участков дуги перестроения 5 на соседнюю полосу движения перед началом области со сплошной разметкой
9.3 Требования к данным элементов интеллектуальной транспортной системы
9.3.1 Интеллектуальный пассивный дорожный датчик формирует следующие выходные данные:
- номер идентификатора оборудования;
- толщину слоя воды, водного раствора NaCI, концентрации соли NaCI, мм;
- температуру дорожного полотна, °C.
Датчик оптической видимости формирует следующие выходные данные:
- метеорологическую оптическую дальность, м.
13
ПНСТ 824—2023
9.3.2 Датчик температуры и влажности воздуха формирует следующие данные:
- температуру воздуха, °C;
- относительную влажность, %.
9.3.3 Датчик осадков формирует следующие данные:
- тип осадков (дождь, снег, дождь со снегом);
- размер регистрируемых частиц, мм.
9.3.4 Датчик давления формирует следующие данные:
- атмосферное давление, гПа.
9.3.5 Датчик скорости воздушного потока формирует данные о скорости воздушного потока, м/с.
9.3.6 Автоматическая станция контроля загрязнения атмосферы формирует следующие данные: - идентификатор оборудования;
- концентрацию оксида азота NO, мг/м3;
- концентрацию диоксида азота NO2, мг/м3;
- концентрацию диоксида серы SO2, мг/м3;
- концентрацию сероводорода H2S, мг/м3;
- концентрацию оксида углерода СО, мг/м3;
- концентрацию аммиака NH3, мг/м3;
- сумму углеводородов ^СН, мг/м3.
9.3.7 Динамическое информационное табло формирует следующие данные:
- идентификатор оборудования;
-текущую информационную политику (экраны сообщений, время экспозиции сообщений).
9.3.8 Знак переменной информации формирует следующие данные:
- идентификатор оборудования;
-текущую информационную политику (экраны сообщений, время экспозиции сообщений).
9.3.9 Камера видеонаблюдения формирует запись видео о текущей дорожной ситуации.
9.3.10 Видеокамера с режимом детектирования ДТП и ЧС фиксирует следующие данные:
- факт остановки ТС (номер полосы, координата);
- факт возникновения предзаторовой ситуации;
- факт возникновения затора;
- факт движения ТС в противоположном направлении;
- факт наступления ДТП;
- факт наличия препятствия на дороге;
- факт наличия пешеходов на полосе движения;
- факт наличия выпавшего груза на полосе движения;
- факт несоблюдения дистанции;
- факт несоблюдения рядности;
- факт обнаружения других дорожных событий и инцидентов, в том числе возгорание ТС.
9.3.11 Детектор транспорта формирует следующие данные:
а) идентификатор оборудования;
б) интенсивность движения, шт./ч;
в) средняя скорость ТП, км/ч;
г) состав ТП (тип обнаруженного ТС по ГОСТ 32965):
1) мотоциклы,
2) легковые автомобили, небольшие грузовики (фургоны) и другие автомобили с прицепом и без него,
3) двухосные грузовые автомобили,
4) трехосные грузовые автомобили,
5) четырехосные грузовые автомобили,
6) четырехосные автопоезда (двухосный грузовой автомобиль с прицепом),
7) пятиосные автопоезда (трехосный грузовой автомобиль с прицепом),
8) трехосные седельные автопоезда (двухосный седельный тягач с полуприцепом),
9) четырехосные седельные автопоезда (двухосный седельный тягач с полуприцепом),
10) пятиосные седельные автопоезда (двухосный седельный тягач с полуприцепом),
11) пятиосные седельные автопоезда (трехосный седельный тягач с полуприцепом),
12) шестиосные седельные автопоезда,
13) автомобили с семью и более осями и другие,
14) автобусы;
14
ПНСТ 824—2023
д) плотность ТП, шт./км;
е) длина очереди, м;
ж) интервал между ТС;
и) характеристики полосы движения:
1) номер полосы движения,
2) атрибуты движения на полосе,
3) интенсивность движения на полосе, шт./ч,
4) средняя скорость движения на полосе, км/ч,
5) длина очереди на полосе, м,
6) интервал между ТС внутри полосы;
к) характеристики ТС:
1) номер полосы расположения;
2) мгновенная скорость ТС, км/ч;
3) тип ТС (по ГОСТ 32965).
9.3.12 Дорожный контроллер формирует следующие данные:
- идентификатор оборудования;
- текущий план регулирования;
- количество регулируемых фаз движения;
- интервал времени длительности основных тактов, с;
- интервал времени длительности промежуточных тактов, с;
- дискретность изменения длительности основных и промежуточных тактов, с;
- порядок переключения светофорных сигналов в цикле.
9.3.13 Мастер контроллер/сервер в ЦОД формирует следующие данные:
- идентификатор оборудования;
- текущий план светофорной координации;
-дополнительную информацию.
9.3.14 Пешеходные вызывные устройства формируют следующие данные:
- идентификатор оборудования;
- текущее состояние;
- время вызова устройства;
- отображение времени для перехода;
- отсчет времени ожидания пешеходного перехода.
9.3.15 Светофор формирует следующие данные:
- идентификатор оборудования;
- текущую сигнальную информацию;
- время ожидания;
- длительность фазы.
9.3.16 Специальные технические средства, имеющие функции фото- и киносъемки, видеозаписи для фиксации нарушений правил дорожного движения формируют следующие данные:
а) идентификатор оборудования;
б) возможные регистрируемые события:
1) проезд без совершения административного правонарушения,
2) нарушение установленного скоростного режима: превышение установленной скорости движения, движение по автомагистрали на ТС, скорость которого по технической характеристике менее 40 км/ч,
3) нарушение установленных правил стоянки или остановки ТС, несоблюдение требований, предписанных дорожными знаками или разметкой проезжей части дороги, запрещающими остановку или стоянку ТС,
4) движение по обочине (движение ТС без перестроения),
5) движение по тротуарам, пешеходным, велосипедным и велопешеходным дорожкам, полосам для велосипедистов в нарушение ПДД,
6) нарушение правил пользования внешними световыми приборами,
7) движение по полосе для маршрутных ТС (в попутном направлении) или остановка на указанной полосе, нарушающие ПДД,
8) выезд на полосу встречного движения, нарушающий ПДД,
9) выезд на трамвайные пути встречного направления,
15
ПНСТ 824—2023
10) движение во встречном направлении по дороге с односторонним движением,
11) разворот, поворот налево, движение задним ходом в местах, где такие маневры запрещены,
12) нарушение требований дорожных знаков и дорожной разметки (за исключением вышеназванных случаев),
13) проезд на запрещающий сигнал светофора, в том числе на регулируемом пешеходном переходе, выезд на железнодорожный переезд при запрещающем сигнале светофора,
14) невыполнение требования ПДД об остановке перед стоп-линией при запрещающем сигнале светофора,
15) выезд на перекресток или пересечение проезжей части дороги в случае возникновения затора,
16) невыполнение требования ПДД уступить дорогу пешеходам,
17) иные административные правонарушения в области дорожного движения;
в) получаемые материалы событий:
1) фотоизображение ТС в зоне контроля,
2) увеличенное фотоизображение его государственного регистрационного знака,
3) не менее двух последовательных фотоизображений ТС в зоне контроля с интервалом не менее 0,1 с, на которых зафиксированы моменты совершения административного правонарушения водителем данного ТС либо АСВ ВАТС, с полностью распознанным государственным регистрационным знаком,
4) увеличенные фотоизображения полностью распознанного государственного регистрационного знака ТС,
5) расстояние до ТС при измерении скорости движения ТС,
6) значения измеренной скорости движения и информация о направлении движения ТС,
7) значения измеренной скорости движения ТС,
8) фотоизображение, на котором зафиксировано ТС, остановившееся в месте, где запрещена стоянка или остановка, или в зоне действия дорожных знаков 5.29 или 6.4 по ГОСТ Р 52290 и ГОСТ Р 52289 с дорожным знаком дополнительной информации (табличкой) по ГОСТ Р 52290 и ГОСТ Р 52289, устанавливающим режим стоянки ТС.
9.3.17 Геотехническое измерительное оборудование формирует следующие данные:
- идентификатор оборудования;
- гидросистему контроля осадков, мм;
- ленточный экстензометр, м;
- наклономер, град.;
- поверхностный экстензометр, мм;
- скважинный экстензометр, мм;
- струнный деформометр, мм;
- электронный трещиномер, мм.
9.3.18 Измерительная станция ГНСС формирует следующие данные:
- идентификатор;
- отклонение реперной точки, мм.
9.3.19 Метеорологическое измерительное оборудование формирует следующие данные:
- идентификатор;
- температуру воздуха, °C;
- относительную влажность воздуха, %;
- атмосферное давление, гПа;
- скорость ветра, м/с;
- направление ветра, град.;
- наличие осадков;
- тип осадков;
- количество осадков, мм;
- метеорологическую дальность видимости, м;
- температуру на поверхности и в глубине дорожного покрытия, °C;
- состояние поверхности дороги;
- толщину слоя воды на поверхности, мм;
- толщину слоя снега на поверхности, мм;
- точку росы, °C;
16
ПНСТ 824—2023
- порывы ветра, м/с;
- интенсивность осадков, мм/ч;
- количество и концентрацию ПГМ, %.
9.3.20 Дорожная станция кооперативных ИТС формируют следующие данные:
- идентификатор;
- тип связи (ETSI G5, C-V2X);
- сообщения САМ;
- сообщения DENM;
- сообщения LDM;
- сообщения POTI.
9.3.21 Бортовое оборудование кооперативных ИТС формируют следующие данные:
- идентификатор;
- тип связи (ETSI G5, C-V2X);
- сообщения САМ;
- сообщения DENM;
- сообщения LDM;
- сообщения POTI.
9.3.22 Станция выдачи дифференциальных поправок для режима RTK формирует следующие данные:
- идентификатор;
- сообщения, содержащие дифференциальные поправки.
9.3.23 Подсистема высокоточного позиционирования РРР формирует следующие данные:
- идентификатор;
- сообщения, содержащие высокоточную эфемеридно-временную информацию.
9.4 К данным элементов К-ИТС относится перечень декодированных сообщений, передаваемых внутри сети между участниками, в том числе:
- тип;
- высокоточная позиция;
- статус;
- сообщения САМ;
- сообщения DENM;
- иные сообщения.
9.5 Слой «Высокоточные обезличенные данные ВАТС» обладает следующими обязательными атрибутами:
- кинетической моделью ВАТС;
- уровнем приоритета;
- режимом работы;
- маршрутом движения;
- статусом;
- режимом движения;
-данными, характеризующими психофизиологическое состояние водителя и пассажиров;
- сообщениями о нештатных, конфликтных, опасных ситуациях;
- сообщением о ДТП, сформированным и переданным УВЭОС;
- текущей позицией и направлением движения;
- текущим положением руля или управляемых колес.
9.6 К высокоточной информации о других участниках дорожного движения и препятствиях необходимо относить следующие объекты и их параметры:
а) объекты «Транспортное средство»:
1) высокоточная позиция объекта,
2) направление движения объекта,
3) скорость движения объекта,
4) статус объекта;
б) объекты «Пешеход»:
1) высокоточная позиция объекта,
2) направление движения объекта,
3) скорость движения объекта;
17
ПНСТ 824—2023
в) объекты «Дорожные работы»:
1) высокоточная позиция объекта,
2) габариты объекта,
3) тип дорожных работ,
4) дата и время проведения дорожных работ,
5) дата и время завершения дорожных работ,
6) иные параметры объекта;
г) объекты «Животные на дороге»:
1) высокоточная позиция объекта,
2) направление движения объекта,
3) иные параметры объекта;
д) объекты «Дефекты покрытия»:
1) высокоточная позиция,
2) габариты объекта,
3) тип дефекта,
4) дата и время обнаружения дефекта,
5) дата и время устранения дефекта,
6) иные параметры объекта.
18
ПНСТ 824—2023
Приложение А (обязательное)
Функциональная архитектура динамической цифровой карты дорожного движения
Архитектура ДЦКДД
Функции управления ДЦКДД
Функция построения оптимального маршрута движения
Функция расчета оптимальных и безопасных параметров движения
Функция перераспределения ТП ВАТС
Функция повышения ситуационной осведомленности ВАТС
Функция обеспечения информационного обмена с ВАТС
Функция построения условий движения
Функция синхронизации управляющих воздействий
Функция хранения, обработки данных статических и динамических объектов
Данные | |||||
Высокоточные данные УДС и дорот | Данные элементов ИТС | Данные элементов К-ИТС | Высокоточные обезличенные данные ВАТС | Высокоточная информация о других участниках ДД и препятствиях | |
а} исходные данные элементов дороги и геодезических замеров:
1) облака точек результатов лазерного сканирования,
2) данные геодезических замеров,
3) геопривязанные обработанные георадарные профили,
4) геопривязанные фотоматериалы,
5) результаты диатостики и оценки технического состояния дорог, б) фоновые данные; в) цифровая картографическая подложка;
г) дорога (структурные линии, оси и кромки);
д) данные, описывающие объекты дороги, придорожной инфраструктуры и сервиса; е) граф дорог;
ж) навигационная информация высокой точности, представленная логической моделью дуг и узлов для построения маршрутов движения
Исходные данные элементов ИТС из подсистем: — метеомониторинга; — мониторинга состояния дороги и дорожной инфраструктуры; — мониторинга экологических параметров; —диспетчерского управления транспортом служб содержания дорог; — информирования участников дорожного движения; - видеонаблюдения, детектирования ДТП и ЧС; — мониторинга параметров ТП; — светофорного управления; — пополосного управления; —обеспечения приоритета ТС | —тип; —позиция; — статус; — сообщения САМ; —сообщения DENM | |
—кинематическая модель ВАТС;
— уровень приоритета;
—режим работы;
- маршрут движения;
—статус;
— режим движения (ВАТС-водитель);
—данные, характеризующие психофизиологическое состояние водителя и пассажиров;
—сообщения о нештатных, конфликтных, опасных ситуациях;
— текущая позиция и направление движения;
—положение руля или управляемых колес
а) тип:
1) транспортные средства,
2) пешеходы,
3) дорожные работы,
4) животные,
5) дефекты покрытия,
6) иные препятствия;
б) позиция;
в) направления движения;
г) скорость движения;
д) статус;
е) иные параметры
Рисунок А. 1 — Физическая и функциональная архитектура ДЦКДД
19
ПНСТ 824—2023
Библиография
[1] Распоряжение Правительства Российской Федерации от 25 марта 2020 г. № 724-р «О Концепции обеспечения безопасности дорожного движения с участием беспилотных транспортных средств на автомобильных дорогах общего пользования»
УДК 656.13:006.354
ОКС 35.240.60
Ключевые слова: интеллектуальные транспортные системы, динамическая цифровая карта дорожного движения, архитектура, высокоавтоматизированные транспортные средства
Редактор М.В. Митрофанова
Технический редактор И.Е. Черепкова
Корректор Р.А. Ментова
Компьютерная верстка И.Ю. Литовкиной
Сдано в набор 25.12.2023. Подписано в печать 09.01.2024. Формат 60*847в. Гарнитура Ариал.
Усл. печ. л. 2,79. Уч-изд. л. 2,37.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}