ГОСТ Р ИСО 15623-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ С ДВИЖУЩИМСЯ ВПЕРЕДИ ТРАНСПОРТНЫМ СРЕДСТВОМ
Требования к эксплуатационным характеристикам и методы испытания
Intelligent transport systems. Forward vehicle collision warning systems. Performance requirements and test procedures
ОКС 35.240
Дата введения 2018-07-01
Предисловие
1 ПОДГОТОВЛЕН Закрытым акционерным обществом "НПП Транснавигация" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 7 ноября 2017 г. N 1673-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 15623:2013* "Интеллектуальные транспортные системы. Системы предупреждения столкновений с движущимся впереди транспортным средством. Требования к эксплуатационным характеристикам и методы испытания" (ISO 15623:2013 "Intelligent transport systems - Forward vehicle collision warning systems - Performance requirements and test procedures", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ИСО 15623 разработан техническим комитетом ИСО/ТК 204 "Интеллектуальные транспортные системы".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Ноябрь 2018 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Основная функция Системы предупреждения столкновений с движущимся впереди транспортным средством (FVCWS) - это предупреждение водителя о том, что впереди перемещающееся транспортное средство, попадающее на траекторию движения его транспортного средства, создает потенциально опасную ситуацию. Предупреждение формируется на основе использования информации, такой как:
1) наличие движущегося впереди транспортного средства на траектории движения испытуемого транспортного средства;
2) расстояние до движущегося впереди транспортного средства;
3) скорость движения транспортного средства относительно движущегося впереди транспортного средства. Основываясь на собранной информации, контроллер, обозначенный на рисунке 1 как "FVCWS стратегия выбора цели и предупреждения водителя", формирует предупреждение водителю.
|
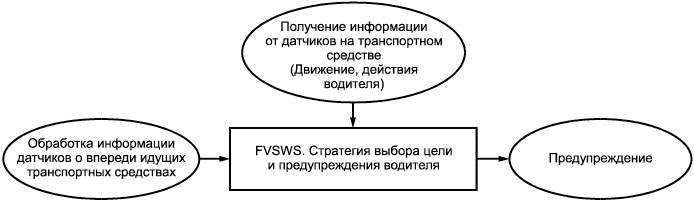
Рисунок 1 - Функциональные элементы системы предупреждения столкновений с движущимся впереди транспортным средством
Автопроизводители и поставщики отдельных компонентов по всему миру энергично проводят разработки и коммерциализацию данных FVCWS систем. Системы данного типа уже появились на рынке в некоторых странах. Мероприятия в области стандартизации проводятся заинтересованными странами с 1994 года. Настоящий международный стандарт разработан для рассмотрения только основных требований к характеристикам и процедурам испытаний систем типа FVCWS. Данный международный стандарт может быть использован в качестве основы при разработке стандартов для систем, которые имеют больший набор характеристик, превышающих рекомендации данного международного стандарта.
1 Область применения
Настоящий международный стандарт устанавливает требования к характеристикам и процедурам испытаний систем, имеющих функции предупреждения водителя о возможном столкновении с движущимся впереди транспортным средством при движении без нарушения установленной скорости. FVCWS работает в установленных диапазонах скоростей, радиусов кривизны дороги и для установленных типов движущихся впереди транспортных средств. Данный стандарт касается движения легковых автомобилей, грузовых автомобилей, автобусов, мотоциклов на дорогах с радиусом кривизны свыше 125 метров. Ответственность за безопасность движения остается за водителем.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*. Для датированных ссылок следует применять только указанное издание. Для недатированных - последнее издание (включая все поправки к нему).
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 825-1:1993, Safety of laser products - Part 1: Equipment classification, requirements and user's guide (includes update of 1994) [Безопасность лазерной техники. Часть 1. Классификация оборудования, требования и руководство пользователя (включая обновления 1994 года)].
3 Термины и определения
В настоящем стандарте применяются следующие термины с соответствующими определениями:
3.1 предупреждение о столкновении: Информация, которую система выдает водителю и которая означает необходимость оперативной реакции водителя для того, чтобы избежать или уменьшить тяжесть столкновения с движущимся впереди транспортным средством.
Примечание - Данное предупреждение выдается до возникновения опасной ситуации для предупреждения водителя о необходимости применения экстренного торможения, смены полосы движения или других экстренных маневров, чтобы избежать столкновения.
3.2 коэффициент отражения цели (мишени) испытаний RCTT: Оптическая отражательная способность цели радара, которая определена как интенсивность излучения по направлению к приемнику (Iref - Вт/ср), измеренная на уровне цели сразу после отражения, поделенная на интенсивность излучения от трансмиттера (Et - Вт/м), измеренную на уровне цели сразу перед отражением.
Примечание - Единицы измерения значения для RCTT - м2/ср (см. приложение С).
3.3 движущееся впереди транспортное средство: Транспортное средство, движущееся впереди на той же дороге и в том же направлении, что и испытуемое транспортное средство.
3.4 система предупреждения столкновений с движущимся впереди транспортным средством FVCWS: Система, способная предупреждать водителя о возможном столкновении с другим транспортным средством впереди на пути его транспортного средства.
3.5 транспортные средства, создающие препятствие: Транспортные средства, как движущиеся, так и стоящие неподвижно, рассматриваемые как потенциальная угроза, которая может быть обнаружена системой.
Пример - Только моторизированные транспортные средства, такие как легковые автомобили, грузовые автомобили, автобусы и мотоциклы.
3.6 предварительное предупреждение о столкновении: Информация, которую система выдает водителю на ранней стадии потенциально опасной ситуации, которая может привести к столкновению с движущимся впереди транспортным средством.
Примечание - Система может выдавать данное сообщение перед сообщением о возможном столкновении.
3.7 эффективная поверхность рассеяния RCS: Мера отражательной способности цели радара, измеренная в метрах квадратных и определенная как произведение 4 и отношения мощности на единицу телесного угла, рассеянной в установленном направлении к мощности на единицу площади рассеяния радиоволны, падающей с установленного направления.
3.8 видимость: Расстояние, на котором освещенность нерассеянного луча белого света с цветовой температурой 2700 К (стандартный, раскаленный добела источник) уменьшается до 5% от освещенности исходного источника света.
3.9 адаптивный круиз-контроль АСС: Усовершенствованная система традиционного круиз-контроля, которая позволяет оборудованному данной системой транспортному средству следовать за движущимся впереди транспортным средством на соответствующем расстоянии путем управления двигателем, трансмиссией и, как вариант, тормозами.
Примечание - См. ИСО 15622.
3.10 соседняя полоса: Полоса движения, имеющая одну общую границу с полосой, на которой движется испытуемое транспортное средство, и имеющая то же направление движения, что и полоса, на которой движется испытуемое транспортное средство.
3.11 дистанция: Расстояние от задней поверхности транспортного средства цели до передней поверхности испытуемого транспортного средства.
|
3.12 подрезающее транспортное средство: Движущееся впереди соседнее транспортное средство, которое имеет боковую составляющую движения в направлении пути испытуемого транспортного средства.
3.13 рывок: Третья производная функции расстояния объекта по времени, эквивалентная скорости изменения ускорения объекта; рассматривается как мера резкости движения транспортного средства.
3.14 минимальная скорость : Минимальная скорость испытуемого транспортного средства, при которой система FVCWS способна инициировать предупреждения.
3.15 столкновение с движущимся впереди транспортным средством: Столкновение с движущимся впереди транспортным средством, при котором передняя часть транспортного средства ударяет в заднюю часть движущегося впереди транспортного средства.
3.16 относительная скорость : Разница между продольной скоростью испытуемого транспортного средства
![]() и транспортного средства цели
и транспортного средства цели ![]() .
. задается уравнением; эквивалентно скорости изменения по времени расстояния между этими двумя транспортными средствами. Положительное значение относительной скорости указывает на то, что транспортное средство-цель движется быстрее, чем испытуемое транспортное средство, а также на то, что расстояние между ними возрастает со временем.
![]() .
.
3.17 требуемое замедление : Минимальное замедление, принимаемое как константа, которое позволит испытуемому транспортному средству соответствовать скорости транспортного средства-цели, не контактируя с ним, и, таким образом, предотвратить столкновение:
![]() .
.
Примечание - - Для термина - это величина уменьшения дистанции между транспортными средствами за время реакции.
3.18 испытуемое транспортное средство SV: Транспортное средство, оборудованное системой FVCWS, как определено в настоящем стандарте.
3.19 транспортное средство-цель TV: Транспортное средство, ближайшее к испытуемому транспортному средству, оборудованному FVCWS, движущееся впереди на его пути.
3.20 время до столкновения ТТС: Оценка времени, которое потребуется, чтобы испытуемое транспортное средство столкнулось с транспортным средством-целью, в предположении, что текущая относительная скорость останется неизменной, как показано в выражении:
![]() .
.
3.21 увеличенное время до столкновения ЕТТС: Время, которое потребуется транспортному средству до столкновения с транспортным средством-целью в предположении, что относительное ускорение между испытуемым транспортным средством (SV) и транспортным средством-целью (TV) остается постоянным, как показано в следующем уравнении:
 .
.
3.22 предупреждающее торможение: Действие, с помощью которого система FVCWS реагирует на обнаружение возможного наезда путем автоматического применения тормоза в течение короткого периода времени, чтобы обеспечивать предупреждение водителю.
3.23 способы предупреждения системы FVCWS: Средства, которые используются системой FVCWS для передачи водителю предупреждений различных типов.
Пример - Зрительные, слуховые и/или осязательные сигналы.
3.24 боковое смещение: Поперечное расстояние между продольными осями испытуемого транспортного средства (SV) и транспортного средства цели (TV), измеряемое в процентах от ширины испытуемого транспортного средства, такое, что, если центры двух транспортных средств выравниваются, значение поперечного расстояния становится равным нулю.
|

4 Обозначения
| - | максимально допустимое боковое ускорение на непрямолинейных участках дороги; |
- | минимальное замедление транспортного средства при экстренном торможении; | |
- | минимальное замедление, принимаемое как константа, которое позволит испытуемому транспортному средству соответствовать скорости транспортного средства-цели (мишени), не контактируя с ним, и, таким образом, предотвратить столкновение; | |
- | ускорение транспортного средства-цели (мишени); | |
АСС | - | система адаптивного круиз-контроля; |
- | минимальное расстояние обнаружения без возможности измерения расстояния; | |
- | минимальное расстояние обнаружения с возможностью измерения расстояния; | |
- | минимальное расстояние обнаружения подрезающего транспортного средства; | |
- | максимальное расстояние обнаружения; | |
Н | - | верхнее значение высоты обнаружения от поверхности земли; |
- | нижнее значение высоты обнаружения от поверхности земли; | |
RCTT | - | коэффициент отражения цели испытаний для ИК-отражателя; |
- | максимальное время реакции водителя до начала торможения после предупреждения; | |
- | минимальное время реакции водителя до начала торможения после предупреждения; | |
- | время ответной реакции водителя торможением; | |
- | время ответной реакции тормозной системы; | |
TTC | - | время до столкновения; |
RCS | - | эффективная поверхность рассеяния; |
| - | скорость транспортных средств в начале испытаний; |
- | максимальная скорость транспортного средства, при которой система способна работать; | |
- | минимальная скорость транспортного средства, при которой система способна работать; | |
| - | минимальная относительная скорость транспортного средства, при которой система способна работать; |
| - | максимальная относительная скорость транспортного средства, при которой система способна работать; |
- | ширина полосы; | |
- | ширина испытуемого транспортного средства. |
5 Спецификации и требования
5.1 Функциональность системы
Цель FVCWS - это формирование предупреждений, которые помогут водителям избежать или уменьшить тяжесть столкновений с движущимся впереди транспортным средством. Эти предупреждения должны быть предоставлены вовремя, чтобы помочь водителям избежать наиболее распространенных аварий путем применения только тормоза. Момент времени оповещения должен быть выбран таким образом, чтобы обеспечивать оповещение достаточно рано и помочь водителю избежать аварии или уменьшить тяжесть последствий, причиненных аварией, без формирования дополнительных предупреждений, которые воспринимаются водителем как досадная отвлекающая помеха. FVCWS обеспечивает только предупреждение и не выполняет управление транспортным средством для смягчения аварии.
FVCWS может работать по-другому, когда испытуемое транспортное средство применяет автоматическое торможение, управляемое другой системой данного транспортного средства, например, такой, как система адаптивного круиз-контроля (АСС) во всем диапазоне скоростей. В этой ситуации FVCWS может принять во внимание возможность автоматической тормозной системы. Тот факт, что транспортное средство находится под контролем устойчивой системы автоматического торможения, может повлиять на критерии предупреждения и содержание предупреждения.
5.2 Необходимые функции
Транспортные средства, оснащенные FVCWS, должны быть оборудованы для выполнения следующих функций:
- обнаружение присутствия впереди транспортного средства;
- определение параметров относительного положения и динамики обнаруженного впереди транспортного средства по отношению к оснащенному FVCWS транспортному средству;
- определение скорости транспортного средства, оборудованного FVCWS;
- оценка траектории оборудованного транспортного средства (классы II и III);
- вывод предупреждений водителю в соответствии с функциями и требованиями к системе FVCWS.
5.3 Модель функционирования
На рисунке 2 показана диаграмма переходов и состояний системы FVCWS.
|
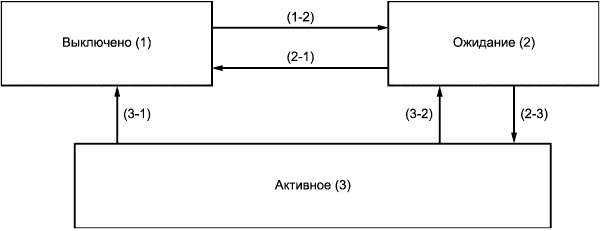
(1-2) - двигатель работает или двигатель работает и выключатель системы в состоянии "включено" (если выключатель имеется); (2-1) - зажигание выключено или выключатель системы в состоянии "выключено", или возникла неисправность; (3-1) - зажигание выключено или выключатель системы в состоянии "выключено", или возникла неисправность; (2-3) - ![]() скорость движения транспортного средства
скорость движения транспортного средства ![]() и КПП не в позиции Parking или Rear; (3-2) - (
и КПП не в позиции Parking или Rear; (3-2) - ( скорость транспортного средства) или (скорость транспортного средства
![]() ), или КПП в позиции Parking или Rear
), или КПП в позиции Parking или Rear
Рисунок 2 - Модель состояний и переходов FVCWS
5.3.1 Описание функциональных состояний
Описание функциональных состояний FVCWS представляет информацию о том, какие функции и в каком состоянии выполняются. Описание требований к функциям изложено полужирным шрифтом.
5.3.1.1 FVCWS "Выключено" (1)
В состоянии "Выключено" не формируются предупреждения водителю. Необязательным требованием является предоставление средств переключения состояний системы FVCWS, выбираемых водителем, кроме ключа зажигания (например, выключатель системы "включено/выключено"). При выключении зажигания система FVCWS переходит в состояние "Выключено". Всякий раз, когда функция самотестирования обнаружит неспособность FVCWS функционировать адекватно, устанавливаются условия неисправности, и FVCWS переходит в состояние "Выключено".
5.3.1.2 FVCWS "Ожидание" (2)
В состоянии "Ожидание" не формируются предупреждения водителю. В данном состоянии FVCWS осуществляет мониторинг скорости транспортного средства и позиции КПП. Если скорость транспортного средства находится в пределах, при которых система способна работать и КПП находится в положении "Drive" (все положения, кроме "Rear" и "Parking"), система переходит из состояния "Ожидание" в состояние "Активное".
FVCWS переходит в состояние "Ожидание" из состояния "Выключено", если цикл зажигания завершился и двигатель работает, или если двигатель работает и (необязательно) выключатель системы находится в состоянии "Включено".
FVCWS переходит в состояние "Ожидание" из состояния "Активное" при невыполнении условий нахождения в активном состоянии: если скорость транспортного средства не находится в пределах, при которых система способна работать (добавляется дельта гистерезиса), выбрано положение КПП "Rear" и "Parking".
5.3.1.3 FVCWS "Активное" (3)
В данном состоянии формируются предупреждения водителю, как только возникнут условия формирования предупреждения. FVCWS входит в данное состояние, если выбрано любое состояние КПП для движения вперед и скорость движения транспортного средства находится в пределах, при которой система способна работать.
5.3.2 Пределы скорости транспортного средства, при которой система способна работать
Значение должно быть не более 11,2 м/с. Значение
должно быть, по крайней мере, минимум 27,8 м/с и максимум рабочей скоростью транспортного средства. Значение
![]() должно быть не более 4,2 м/с. Значение
должно быть не более 4,2 м/с. Значение ![]() должно быть не менее 20 м/с.
должно быть не менее 20 м/с.
5.4 Функции предупреждения водителю
Система предупреждения столкновений с движущимся впереди транспортным средством должна формировать предупреждения о движущихся (включая "обнаруженное датчиком как движущееся и в настоящий момент остановившееся") транспортных средствах, являющихся препятствием. Необязательным требованием является формирование предупреждений о транспортных средствах, являющихся препятствием и находящихся в стационарном состоянии (не обнаруженные как движущиеся с абсолютной скоростью свыше 4,2 м/с). Предупреждения системы FVCWS формируются в соответствии со следующими функциями.
5.4.1 Мониторинг расстояния и относительной скорости между транспортным средством, оборудованным FVCWS, и транспортным средством-препятствием
Движущееся впереди транспортное средство, являющееся препятствием, обнаруживается устройством обнаружения препятствий, таким как оптический радар (лазер), радиоволновой радар, или система обработки изображений.
5.4.2 Оценивание времени до столкновения
Один из возможных способов оценки времени до потенциального столкновения - это использование результатов оценки скорости движения транспортного средства, расстояния до транспортного средства, являющегося препятствием, относительной скорости между транспортным средством и транспортным средством-препятствием и, возможно, замедления данных транспортных средств. Когда система обнаруживает одновременно несколько транспортных средств, она должна выбрать одно находящееся на траектории транспортное средство, с которым оно может столкнуться первым, если не будут приняты меры относительно данного транспортного средства-препятствия.
5.4.3 Предварительное предупреждение о столкновении и предупреждение о столкновении (см. приложение А)
Система предупреждения о столкновении с движущимся впереди транспортным средством должна обеспечивать предупреждения об опасности столкновения для водителя. Предварительное предупреждение о столкновении является необязательным. Целью предварительного предупреждения о столкновении является информирование водителя о наличии потенциальной опасности столкновения впереди. В этом случае водитель должен подготовиться и принять необходимые меры, чтобы избежать столкновения с движущимся впереди транспортным средством.
Рекомендуется выдать предварительное оповещение до предупреждения о столкновении. Вполне возможно, что может произойти резкое изменение условий, в результате предупреждение о столкновении будет выдано без предшествующего предварительного предупреждения о столкновении.
Предупреждения основаны на независимом или комбинированном использовании визуальных, звуковых и/или тактильных органов чувств. В случае предупреждения об опасности столкновения водителю выдается визуальное, звуковое и/или тактильное предупреждение.
Предупреждения выдаются в зависимости от:
- относительной скорости между рассматриваемым транспортным средством и транспортным средством, создающим препятствие;
- скорости транспортного средства, для которого возникло препятствие;
- расстояния между транспортными средствами;
- пробега за время реакции водителя;
- величины замедления транспортного средства и транспортного средства-препятствия.
Когда транспортное средство приближается к транспортному средству-препятствию, предупреждение об опасном расстоянии должно быть принято в соответствии с критериями требуемого порогового значения замедления или их эквивалентов, если используются другие методы вывода предупреждения.
5.5 Требования к элементам системы
5.5.1 Выходная информация FVCWS
Система FVCWS должна обеспечивать выдачу водителю предупреждения об опасности столкновения. Предварительное предупреждение о столкновении является необязательным.
5.5.2 Методы предупреждения
5.5.2.1 Предупреждения о столкновении должны содержать визуальное предупреждение, а также звуковое и/или тактильное предупреждение.
5.5.2.2 Предварительные предупреждения о столкновении должны быть визуальными или звуковыми или представлять комбинацию визуальной и звуковой форм. Дополнительные тактильные способы предупреждения являются необязательными для предварительного предупреждения о столкновении.
5.5.2.3 Не рекомендуется применять торможение как метод предупреждения о столкновении в случае, если водитель транспортного средства в этот момент сам применяет тормоза.
5.5.2.4 Торможение может использоваться для предупреждения об опасности столкновения и предварительного предупреждения столкновения, если автоматическое торможение транспортного средства включено (т.е. когда используется автоматическое торможение).
5.5.2.5 Предупреждение торможением применяется в течение момента времени, длительность которого составляет менее одной секунды. Это влечет за собой замедление менее чем 0,5 g и снижение максимальной скорости на 2 м/с. Для обеспечения эффективности предупреждения торможением, торможение должно быть исполнено, как минимум, со средним замедлением 0,1 g с минимальной длительностью 100 мс.
5.5.2.6 Звуковой сигнал оповещения должен быть выбран таким образом, чтобы он мог быть легко услышан и отличим от предупреждений, не связанных с угрозой впереди (например, предупреждения о боковых угрозах).
5.5.2.7 Срабатывание преднатяжителя ремня безопасности может использоваться системой FVCWS для предупреждения о столкновении.
5.5.3 Требуемый порог торможения
5.5.3.1 Система FVCWS должна выдать предупреждение об опасности столкновения, когда требуется замедление, превышающее пороговое значение . Пороговое значение
не должно превышать 0,68 g (с учетом значения времени реакций, указанного в 5.5.4) для условий сухой дороги и теплой погоды.
5.5.3.2 Система FVCWS, которая обеспечивает регулировку момента времени формирования предупреждения для водителя, должна иметь, по крайней мере, один параметр, который удовлетворяет необходимым критериям значения замедления , указанного в 5.5.3.1.
5.5.3.3 Система FVCWS может выдать предварительное предупреждение о столкновении при меньшем значении требуемого порога замедления.
5.5.3.4 Необходимые значения порога замедления для предварительного предупреждения и предупреждения о столкновении могут быть адаптированы на основе выявленного состояния дорог, окружающей среды, состояния водителя, поведения водителя и различных дорожных ситуаций.
5.5.3.5 В случае, когда применяется автоматическое торможение транспортного средства, не является обязательным изменение таким образом, чтобы его значение превышало максимально возможное значение замедления активных систем автоматического торможения (например, системы АСС).
5.5.4 Время отклика
5.5.4.1 Время реакции водителя на предупреждение [время реакции водителя торможением ![]() ] должно учитываться в расчетах момента времени выдачи предупреждения.
] должно учитываться в расчетах момента времени выдачи предупреждения. следует принимать не менее чем 0,8 с.
5.5.4.2 Система FVCWS, обеспечивающая регулировку момента времени выдачи предупреждения водителю, должна иметь, по меньшей мере, одно значение параметра, удовлетворяющее требованиям к значению , указанным в 5.5.4.1.
5.5.4.3 Время отклика системы торможения может быть включено в расчеты требуемого замедления. Выбор значения времени отклика системы торможения остается за конструкторами системы FVCWS.
5.5.4.4 Время реакции водителя торможением ![]() и время отклика системы торможения
и время отклика системы торможения может быть взято равным нулю в момент, когда водитель транспортного средства применяет тормоза.
5.5.4.5 В случае, когда в транспортном средстве применяется автоматическое торможение, время реакции водителя на предупреждение [время ответной реакции водителя торможением ![]() ] может быть взято равным нулю в расчетах требуемой величины замедления.
] может быть взято равным нулю в расчетах требуемой величины замедления.
5.5.5 Требования по неприменению предупреждений
Подпункт 5.5.5.1 регламентирует условия, при которых FVCWS не должна выдавать никаких предупреждений. В 5.5.5.2-5.5.5.7 даны примеры, когда предупреждения FVCWS должны подавляться или удаляться.
5.5.5.1 Система FVCWS не должна выдавать никаких предупреждений, если замедление транспортного средства превышает или равно установленному пороговому значению замедления.
5.5.5.2 Система FVCWS не должна выдавать никаких предупреждений в отношении движущегося впереди транспортного средства, движущегося по другой полосе на дорогах с радиусом кривизны, указанным для каждого класса в таблице 2.
5.5.5.3 Не рекомендуется выдавать никаких предупреждений в отношении транспортного средства, движущегося быстрее рассматриваемого транспортного средства и перестраивающегося перед ним на его полосу.
5.5.5.4 Предупреждения системы FVCWS могут подавляться или удаляться в случае, если водитель транспортного средства применяет торможение.
5.5.5.5 Предупреждения системы FVCWS могут подавляться или удаляться в случае, если время до столкновения (ТТС) превышает 4,0 с.
5.5.5.6 Предупреждения системы FVCWS могут подавляться или удаляться в случае, если определено, что оборудованное данной системой транспортное средство меняет полосу движения или выполняет динамичный маневр, или если обнаружено переопределение торможения дросселем (при условии отмены автоматического торможения путем применения дроссельной заслонки водителем транспортного средства), или если предупреждение торможением АСС активно.
5.5.5.7 Предупреждения системы FVCWS могут подавляться или удаляться в случае, если столкновения с движущимся впереди транспортным средством можно избежать, используя обычный маневр рулем управления, при котором значение бокового ускорения меньше или равно 3,5 м/с.
5.5.5.8 Предупреждения системы FVCWS могут подавляться или удаляться в случае, если ситуация находится вне операционных пределов, определенных в 5.3.2.
5.5.6 Пример вычисления расстояния предупреждения
Расчет минимального требуемого расстояния может основываться на значениях =0,8 с и
=6,67 м/с
. Используя определение
, изложенное в 3.17, получают:
![]() .
.
5.5.7 Эквивалентная точка запуска предупреждения
Для других систем, которые используют различные методы запуска предупреждений (например, ТТС или ЕТТС), время срабатывания предупреждения должно отвечать требованиям пунктов 5.5.3, 5.5.4 и 5.5.5.
5.6 Классификация систем
Системы классифицируются в соответствии с их способностью сохранять работоспособность на непрямолинейных участках в зависимости от радиуса кривизны дороги, как показано в таблице 1.
Таблица 1 - Классификация систем
Класс эксплуатации | Возможный радиус кривизны в плане |
I | Радиус кривизны больше или равен 500 м |
II | Радиус кривизны больше или равен 250 м |
III | Радиус кривизны больше или равен 125 м |
Системы класса I должны иметь способность обнаруживать транспортные средства-препятствия впереди на траектории движения испытуемого транспортного средства на участках дороги с радиусом кривизны до 500 м.
Системы класса II должны иметь способность обнаруживать транспортные средства-препятствия впереди на траектории движения испытуемого транспортного средства на участках дороги с радиусом кривизны до 250 м.
Системы класса III должны иметь способность обнаруживать транспортные средства-препятствия впереди на траектории движения испытуемого транспортного средства на участках дороги с радиусом кривизны до 125 м.
5.7 Зона обнаружения транспортного средства-препятствия и эксплуатационные характеристики
5.7.1 Зона обнаружения транспортного средства-препятствия
5.7.1.1 Минимальная зона обнаружения (классы I, II и III)
Минимальная зона обнаружения с помощью датчика обнаружения препятствия системы FVCWS отображена на рисунке 3.
|
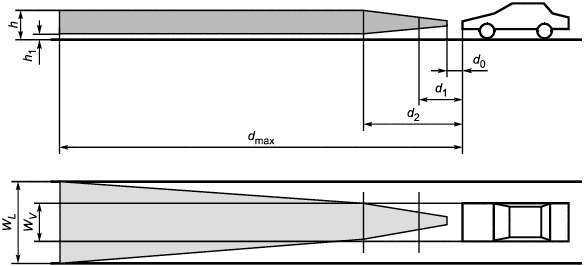
Рисунок 3 - Зона обнаружения
5.7.1.1.1 Диапазон обнаружения
Таблица 2 - Требования к диапазону обнаружения
Расстояние | Формула или величина | Значение |
| Максимальное расстояние обнаружения | |
He более 10 м для класса I | Минимальное расстояние обнаружения движущегося впереди транспортного средства при боковом смещении менее 20% | |
| Минимальное измеряемое системой расстояние | |
Не более 2 м | Минимально возможное расстояние обнаружения препятствия без измерения расстояния | |
где
| ||
В приложении А приведены типичные значения некоторых из этих параметров. Выбираемый диапазон расстояния обнаружения должен удовлетворять требованиям к предупреждениям системы, указанным в пунктах 5.5.3 и 5.5.4.
5.7.1.1.2 Ширина и высота зоны обнаружения
Таблица 3 - Требования к величине ширины и высоты зоны обнаружения
Расстояние | Требования к ширине зоны | Требования к высоте зоны |
|
| |
|
| |
Не определены | Не определены | |
Не определены | Не определены |
5.7.1.2 Диапазон обнаружения для радиуса кривизны в плане участка дороги
Ширина диапазона обнаружения для радиуса кривизны дороги в плане должна быть продлена в зависимости от радиуса кривой (приложение В).
5.7.2 Точность определения расстояния предупреждения
Неадаптивные системы должны выдавать предупреждение при номинальном диапазоне с допустимым отклонением ±2 м или ±15%. Периодические испытания для проверки выполнения этого требования должны быть выполнены с теми же начальными условиями проведения испытаний, в целях предотвращения возможных отклонений в производительности системы. Адаптивные системы могут не выполнять это требование в силу своей природы. Адаптивная система - это система, в которой время предупреждения является функцией различных параметров, например реальное состояние дороги, условия окружающей среды, состояние водителя, поведение водителя и различные сценарии вождения.
5.7.3 Способность распознавания цели
5.7.3.1 Распознавание в продольном направлении
Если имеются два или более транспортных средства, находящихся впереди в зоне обнаружения и на расстоянии в пределах от до
от переднего края испытуемого транспортного средства, то система должна выбрать транспортное средство, которое ближе всего к испытуемому транспортному средству и его траектории, в качестве транспортного средства-цели так, чтобы FVCWS работала с ним.
5.7.3.2 Распознавание в поперечном направлении
Если имеются два или более движущихся впереди транспортных средства на траектории движения испытуемого транспортного средства или соседней к ней, система должна выбрать транспортное средство, находящееся на траектории движения, в качестве транспортного средства-цели, чтобы FVCWS работала с ним.
Если имеются расположенные сверху объекты на высоте более 4,5 м над уровнем проезжей части, такие как установленные над проезжей частью дорожные знаки и т.д., система не должна распознавать любой из этих объектов в качестве транспортного средства-цели.
5.8 Эксплуатационные характеристики системы на непрямолинейных участках дороги
FVCWS должна быть в состоянии предупредить о транспортных средствах-препятствиях на пути, на прямых участках дороги и непрямолинейных участках с радиусом кривизны, большим или равным 500 м, для класса I, большим или равным 250 м для класса II и большим или равным 125 м для класса III.
5.9 Требования по безопасности пользователей
5.9.1 Оптический радар
Должен удовлетворять требованиям, предъявляемым к лазерам класса I, как определено в МЭК 825-1.
5.9.2 Радиоволновой радар
Спецификация должна быть основана на международном стандарте, который может быть разработан в будущем экспертами в области радиоволновых радаров.
5.10 Требования к человеко-машинному интерфейсу
5.10.1 Требования к выдаваемым предупреждениям
Все визуальные, звуковые и тактильные предупреждения должны быть заметны для водителя. Рекомендуется, чтобы визуальный и звуковой предупреждающие сигналы удовлетворяли соответствующим свойствам человека, как показано в таблице 4. В таблице 4 приведен пример. Требования к предупреждениям о столкновении и предварительным предупреждениям приведены в разделе 5.5.2.
Таблица 4 - Характеристики предупреждений
Предупреждение | Визуальное предупреждение | Звуковое предупреждение |
Предупреждение о столкновении | Цвет: красный | Давление: звуковое давление должно быть на том же уровне или выше тех всех слуховых предупреждений, присутствующих в транспортном средстве, придавая актуальность большую, чем другим звуковым предупреждениям |
Предварительное предупреждение о столкновении | Цвет: желтый или янтарный | Давление: звуковое давление выше уровня фонового шума |
5.10.2 Помехи от предупреждений, формируемых другими системами
Если транспортное средство оснащено системой FWCWS*, наряду с другими системами предупреждения, такими как предупреждения о задних или боковых препятствиях, то предупреждения FVCWS должны быть четко различимы водителем по отношению к предупреждениям от других систем.
________________
* Текст документа соответствует оригиналу. - .
5.10.3 Отображение рабочего состояния
Должны быть предусмотрены сообщения такие, как указанные ниже, по которым четко определяется рабочее состояние системы.
5.10.3.1 Индикация рабочего состояния системы
Может быть предусмотрен индикатор, который информирует водителя о том, что система находится в рабочем состоянии (например, подсвеченный выключатель питания).
5.10.3.2 Индикация неисправностей
Должна быть предусмотрена индикация, которая информирует водителя о неисправности системы (например, сообщение о неисправности на дисплее).
5.11 Осведомленность об ограничениях системы
Пользователи системы должны быть ознакомлены с информацией об ограничениях системы путем использования соответствующих средств, таких как руководство пользователя и/или предупреждающие наклейки.
Например, такими ограничениями могут быть предупреждения о лобовом столкновении, столкновении на перекрестке, работе вне пределов возможностей датчиков (включая непрямолинейные участки с малым радиусом кривизны и др.), предупреждение о максимальной скорости ![]() , которая может быть достигнута и оказаться недоступной для функционирования системы.
, которая может быть достигнута и оказаться недоступной для функционирования системы.
6 Метод оценочных испытаний для определения характеристик функций распознавания
6.1 Спецификация цели испытаний
6.1.1 Оптический радар
Цель для испытаний определяется как имеющая физический размер, форму, поверхность и профиль типового мотоцикла и с коэффициентом отражения цели испытаний (RCTT), который соответствует коэффициенту отражения для мотоциклов.
6.1.2 Радиоволновой радар
Цель для испытаний определяется эффективной поверхностью рассеяния (RCS), характерной для мотоциклов.
Примечание - При фактическом использовании диапазон измерений датчиков обнаружения транспортного средства-препятствия является сравнительно коротким. Трудно добиться плоской волны на рассеивателе. Поэтому значения RCS для использования в транспортных средствах с целью удобства определяются измеряемыми величинами в фактически используемом диапазоне.
Примеры возможной геометрии целей для испытаний обсуждаются в приложении D.
6.1.3 Пассивный оптический датчик
Цель для испытаний определяется как имеющая физический размер, форму, поверхность и профиль типового мотоцикла или пассажирского транспортного средства.
6.2 Условия окружающей среды
Испытания должны проводиться на ровной, сухой асфальтированной или бетонной поверхности.
Диапазон температур должен быть от минус 20°C до плюс 40°C.
Горизонтальная видимость должна быть больше, чем 1 км.
Тест может проводиться при дневном свете.
6.3 Метод испытаний для зоны обнаружения
Динамические испытания являются наиболее естественными испытаниями для зоны обнаружения, однако, в качестве опции, доступен также статический тест.
Статический тест нужно проводить следующим образом. Система должна обнаружить цель, используемую в испытаниях, расположенную на произвольном расстоянии в диапазоне между и
, как показано на рисунке 4. Система должна обнаружить цель, используемую в испытаниях, расположенную на произвольном расстоянии между
и
, как показано на рисунке 4. Система должна обнаружить обе цели, расположенные на расстоянии
и
, как показано на рисунке 4.
|
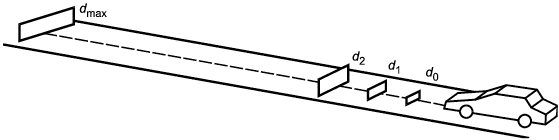
Рисунок 4 - Диапазон расстояний обнаружения
Если обнаружение невозможно проверить без специального измерительного оборудования, например когда датчик и ЭБУ тесно интегрированы, производитель может провести эти испытания с помощью специального измерительного оборудования и предоставить результаты испытаний для проверки. Кроме того, если есть возможность провести динамические испытания, они могут проводиться одновременно с другим испытанием, изложенным в разделе 6, так, чтобы задачи данного метода испытаний выполнялись в рамках проведения других испытаний. Например, транспортное средство, отвечающее ранее определенным параметрам цели, используемой в испытаниях, может быть использовано в качестве цели испытаний. Успешное инициирование предупреждения об опасности столкновения на различных расстояниях, определенных в этом тесте, можно считать успешным обнаружением.
6.4 Метод испытаний для определения величины и точности расстояния обнаружения
6.4.1 Испытание диапазона дальности обнаружения
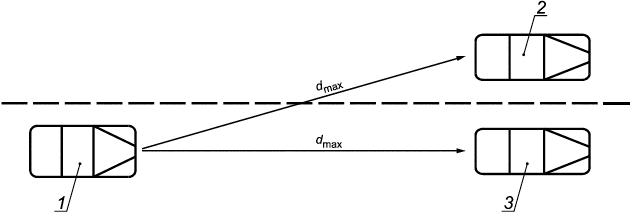
Испытуемое транспортное средство и транспортное средство-цель движутся по одной и той же полосе на прямом участке дороги (см. рисунок 5). Транспортное средство-цель движется со скоростью (8±1) м/с. Испытуемое транспортное средство движется со скоростью (20±2) м/с. Измеренное расстояние предупреждения должно быть больше или равно расстоянию, рассчитанному в 5.5.6.
|
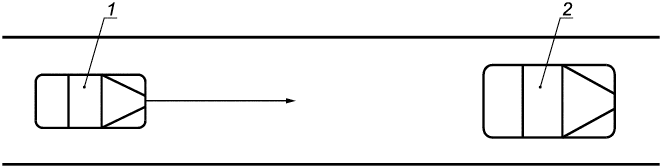
1 - испытуемое транспортное средство, движущееся со скоростью (20±2) м/с; 2 - транспортное средство-цель, движущееся на скорости (8±1) м/с
Рисунок 5 - Испытание диапазона расстояний предупреждения
6.4.2 Испытание точности расстояния предупреждения
Это испытание следует проводить в условиях движения испытуемого транспортного средства.
Стандартная цель испытаний должна находиться в зоне обнаружения, в то время как испытуемое транспортное средство должно двигаться к стандартной цели на скорости V=20 м/с. Расстояние предупреждения должно измеряться по следующей процедуре. Должно быть выполнено два замера времени. Первое время фиксируется в точке, в которой расстояние до транспортного средства-цели равно d. Второе время
фиксируется в точке, где выдается предупреждение (см. рисунок 6). Расстояние предупреждения от стандартной цели рассчитывается как
![]() . Величина D сравнивается с дистанцией предупреждения, указанной производителем.
. Величина D сравнивается с дистанцией предупреждения, указанной производителем.
Расстояние предупреждения по точности должно соответствовать 5.7.2 в 70% повторных испытаний. Количество повторных испытаний должно быть больше или равно 7.
|
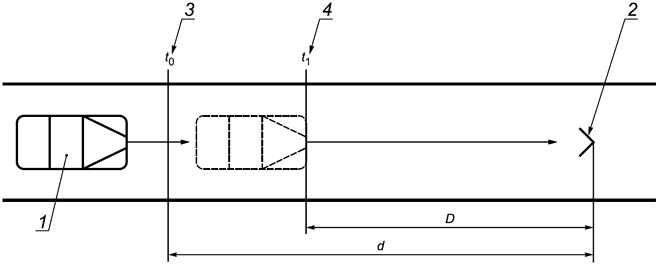
1 - испытуемое транспортное средство; 2 - стандартная мишень; 3 - отметка времени на стандартном расстоянии, указанном производителем; 4 - отметка времени выдачи предупреждения
Рисунок 6 - Испытание точности расстояния предупреждения
6.5 Метод испытания для оценки способности распознавания цели
Это испытание проводится в движении транспортных средств. Данное испытание завершается, когда испытуемое транспортное средство формирует предупреждение. Испытание должно также показать способность избегать ошибочные действия. Например, в условиях испытаний, которые закончены, когда маневр завершен, но предупреждение не было выдано.
6.5.1 Распознавание в продольном направлении
Два транспортных средства, играющие роль цели, движутся в зоне обнаружения с одинаковой скоростью, которая составляет 20 м/с. Испытуемое транспортное средство движется вслед за двумя целями со скоростью 20 м/с. Промежуток времени между двумя транспортными средствами-целями должен быть равен (равен 0,6 с ± 0,1 с). Эти две цели должны располагаться вдоль линии таким образом, чтобы ближнее транспортное средство-цель не маскировало дальнее транспортное средство-цель. Временной разрыв между испытуемым транспортным средством и ближайшим транспортным средством-целью может быть более
(равен 1,5 с). Испытуемое транспортное средство разгоняется до тех пор, пока система не выдаст предупреждение о столкновении. После этого транспортное средство замедляется до момента достижения того же промежутка времени (более 1,5 с) и затем опять следует за транспортным средством-целью с той же скоростью (рисунок 7).
|
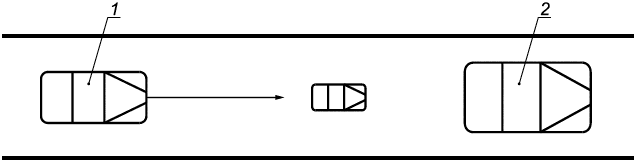
1 - испытуемое транспортное средство; 2 - транспортное средство-цель
Рисунок 7 - Испытание способности распознавания цели в продольном направлении
Далее, через несколько секунд только ближайшее транспортное средство-цель замедляется до скорости, при которой испытуемое транспортное средство выдаст предупреждение о столкновении. Испытание заканчивается, когда испытуемое транспортное средство выдаст предупреждение о столкновении.
6.5.2 Распознавание в поперечном направлении
6.5.2.1 Испытание способности распознавания в поперечном направлении на прямолинейном участке дороги
Испытание должно проводиться динамически. Испытуемое транспортное средство и транспортное средство-цель движутся с одинаковой скоростью, равной 20 м/с. Временной промежуток должен быть (равен 1,5 с). Впереди движется транспортное средство рядом с транспортным средством-целью с одинаковой скоростью 20 м/с (см. рисунок 8). Расстояние между продольными осевыми линиями данных транспортных средств составляет (3,5 м ± 0,25) м. Ширина данных транспортных средств должна быть между 1,4 и 2,0 м. Боковое смещение продольной оси испытуемого транспортного средства относительно продольной оси транспортного средства-цели должно быть не менее 0,5 м. Через несколько секунд движущееся впереди транспортное средство замедляется до скорости, которая значительно ниже, чем скорость испытуемого транспортного средства и транспортного средства-цели. Во время прохождения рядом с замедляющимся передним транспортным средством испытуемое транспортное средство не должно формировать предупреждение. Затем, через несколько секунд транспортное средство-цель замедляется до скорости, которая является достаточно низкой, чтобы испытуемое транспортное средство сформировало предупреждение о столкновении. Испытание завершается, когда испытуемое транспортное средство выдаст предупреждение.
|
1 - испытуемое транспортное средство; 2 - движущееся впереди транспортное средство; 3 - транспортное средство-цель
Рисунок 8 - Испытание способности распознавания в поперечном направлении на прямолинейном участке дороги
6.5.2.2 Испытание способности распознавания в поперечном направлении на непрямолинейном участке дороги
В дополнение к испытаниям на прямолинейном участке дороги, необходимо провести испытание на окружности или достаточной части окружности с радиусом 500 м или менее в случае класса I, с радиусом 250 м или меньше в случае класса II и с радиусом 125 м или менее в случае класса III. Испытание должно проводиться динамически. Испытуемое транспортное средство и транспортное средство-цель движутся по одной и той же полосе с одной и той же скоростью и на расстоянии друг от друга, которое не вызывает предупреждения. Скорость испытуемых транспортных средств в начале теста рассчитывается следующим образом:
![]() ,
,
где ![]() - 2,0 м/с
- 2,0 м/с для класса l,
![]() - 2,3 м/с
- 2,3 м/с для классов II и III.
Движущееся впереди транспортное средство движется по внешней полосе рядом с транспортным средством-целью (см. рисунок 9).
|
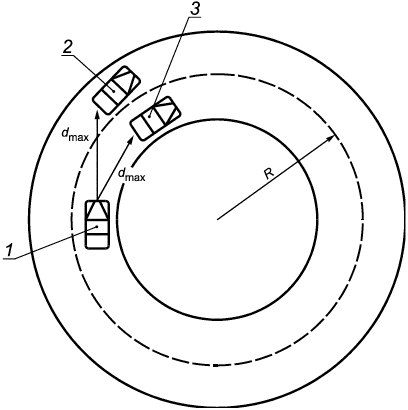
1 - испытуемое транспортное средство; 2 - движущееся впереди транспортное средство; 3 - транспортное средство-цель
Рисунок 9 - Испытание способности обнаружения цели на непрямолинейном испытательном треке
Через несколько секунд движущееся впереди транспортное средство тормозится до скорости, которая существенно ниже, чем скорость испытуемого транспортного средства и транспортного средства-цели. Во время движения переднего транспортного средства с замедлением испытуемое транспортное средство не должно создавать предупреждения. Затем через несколько секунд транспортное средство-цель тормозится до скорости, которая является достаточно низкой для того, чтобы испытуемое транспортное средство выдало предварительное предупреждение о столкновении.
Испытание завершается, когда испытуемое транспортное средство выдаст предупреждение.
6.5.3 Распознавание объектов сверху
Испытание должно выполняться динамически, как показано на рисунке 10. Устанавливается цель для испытаний, которая может привести к формированию ложного предупреждения.
|
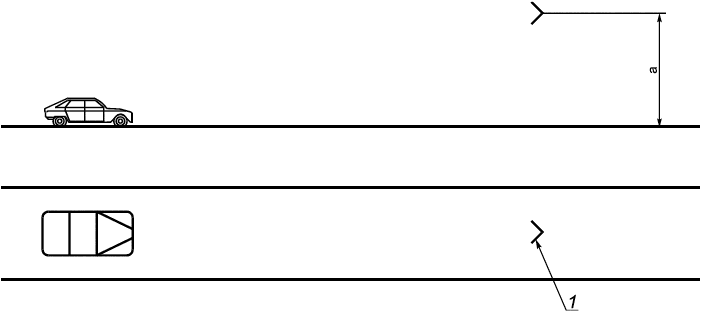
1 - цель испытаний; а =4,5 м
Рисунок 10 - Испытание способности распознавания цели сверху
Цель для испытаний должна представлять бетонный мост или располагаемый сверху дорожный знак. Испытуемое транспортное средство приближается к цели испытаний и проходит под ней. Испытание завершается, когда испытуемое транспортное средство не выдает предупреждение. Высота мишени испытаний составляет 4,5 м.
Приложение А
(обязательное)
Основные положения предупреждения о столкновении
А.1 Основное уравнение
Как показано на рисунке А.1, математическая модель основана на алгоритме расчета расстояния предупреждения, который использует в расчетах абсолютную скорость движения испытуемого транспортного средства и движущегося впереди транспортного средства и рассчитывает расстояние предупреждения. Это расстояние предупреждения сравнивается с измеренным расстоянием и, если оказывается больше, водитель получает предупреждение. Расстояние предупреждения для предварительного предупреждения о столкновении, а также расстояние для предупреждения могут быть заданы путем выбора подходящего времени реакции водителя торможением Т на предупреждение и величины а - замедления транспортного средства.
|
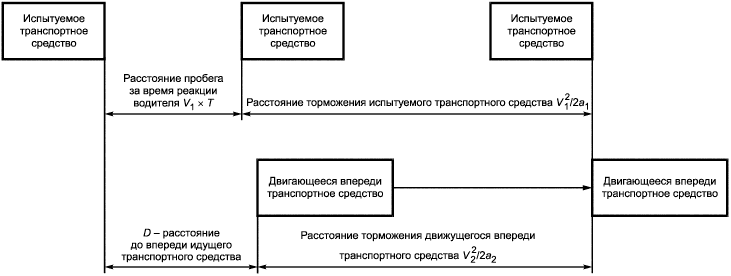
Рисунок А.1 - Принцип работы
Расстояние D до находящегося впереди транспортного средства (препятствия) определяют из выражения
![]() , (А.1)
, (А.1)
где - скорость испытуемого транспортного средства;
- скорость движущегося впереди транспортного средства (препятствия);
Т - время реакции (время реакции транспортного средства торможением);
- замедление испытуемого транспортного средства;
- замедление движущегося впереди транспортного средства (препятствия).
А.2 Сценарии ситуаций, при которых выдаются предупреждения
Хотя существует много сценариев, в которых выдается предупреждение, ниже рассматриваются типичные изученные сценарии.
А.2.1 Движущееся впереди транспортное средство перемещается с той же скоростью, что и испытуемое транспортное средство
Расстояние определяют:
![]() . (А.2)
. (А.2)
А.2.2 Находящееся впереди транспортное средство является стационарным препятствием
Расстояние определяют:
![]() . (A.3)
. (A.3)
Когда испытуемое транспортное средство приближается к движущемуся впереди транспортному средству, перемещающемуся с постоянной скоростью, означает относительную скорость между испытуемым транспортным средством и транспортным средством впереди.
А.2.3 Движущееся впереди транспортное средство приближается с относительной скоростью ![]() .
.
Расстояние D определяют:
![]() . (А.4)
. (А.4)
А.3 Результаты оценки величин Т и а
А.3.1 Время свободного пробега (время реакции водителя на торможение), Т
Результаты испытаний для определения времени свободного хода (время реакции водителя торможением) Т разместились в интервале от 0,3 до примерно 2,0 секунды. Среднее значение Т составило 0,66 секунды. В испытаниях принял участие 321 человек, время задержки работы тормоза измерялось после звукового сигнала. Распределение значений было рассеяно очень широко. Тем не менее, 98% всех испытуемых показали время реакции менее 1,5 секунды.
|
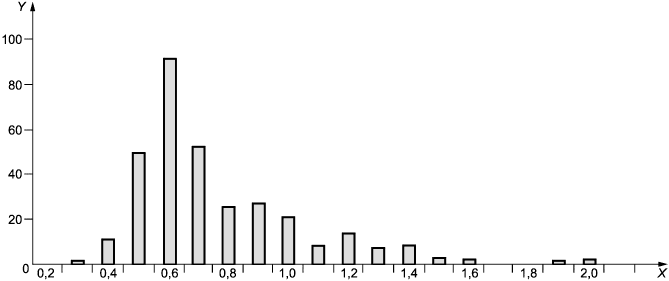
X - время задержки (с), Y - количество человек
Рисунок А.2 - Распределение времени реакции водителей торможением, Т
А.3.2 Замедление, а
Значения величины а были измерены с помощью оценки эффективности экстренного торможения на сухой ровной поверхности дороги. Тесты для величины замедления а показывают, что его значения находятся в пределах от 3,6 до примерно 7,9 м/с. Среднее значение а для легковых автомобилей было 7,0 м/с
, а для коммерческих транспортных средств величина а в среднем составила 5,3 м/с
. Распределение значений было рассеяно очень широко и зависело от типа транспортного средства, степени загруженности, характеристики реакции водителя.
|
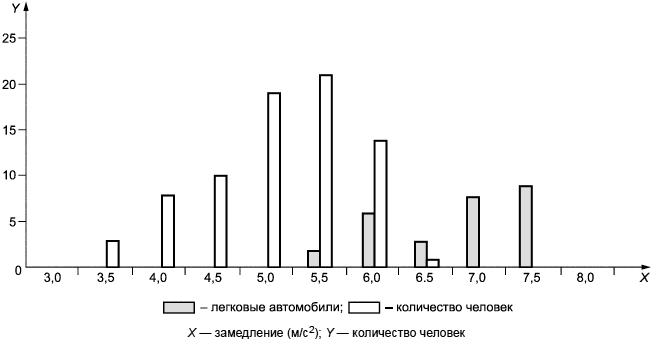
Рисунок А.3 - Распределение замедления
А.4 Примеры расчетов расстояния предупреждения
А.4.1 Движущееся впереди транспортное средство перемещается с обычной скоростью
В случае, если испытуемое транспортное средство движется с обычной скоростью немного выше, чем у движущегося впереди транспортного средства, предположительно время свободного хода (время реакции водителя на использование тормоза) составит 1,5, 0,66, 0,4 с, а расстояние предупреждения [согласно формуле (2)] показано на рисунке А.4.
|
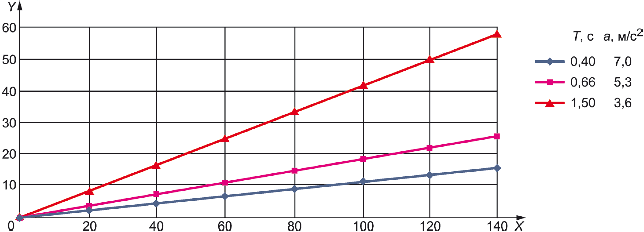
X - скорость транспортного средства (км/ч); Y - расстояние (м)
Рисунок А.4 - Отношение между скоростью транспортного средства и расстоянием, на котором выдается предупреждение о движущемся впереди с постоянной скоростью транспортном средстве
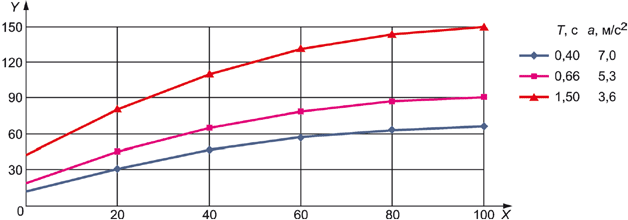
А.4.2 Движущееся впереди транспортное средство является стационарным препятствием
Для случая встречи испытуемого транспортного средства со стационарным препятствием в предположении времени свободного хода (реакции водителя при торможении), равным 1,5; 0,66; 0,4 с, и замедлении 3,6; 5,3; 7,0 м/с отношение между скоростью испытуемого транспортного средства и расстоянием до остановки показано на рисунке А.5.
|
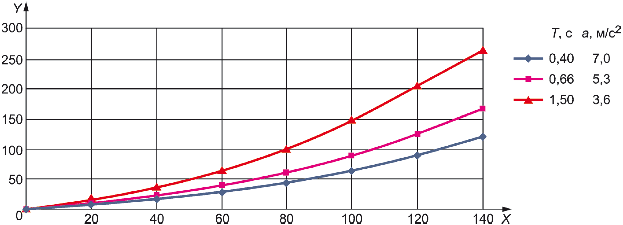
X - скорость транспортного средства (км/ч); Y - расстояние (м)
Рисунок А.5 - Отношение между скоростью транспортного средства и расстоянием до остановки для стационарных препятствий
А.4.3 Движущееся впереди транспортное средство замедляется, ![]()
Из формулы (4) может быть также определена зависимость между относительной скоростью и расстоянием между транспортными средствами. На рисунке А.6 эти соотношения показаны для случая скорости испытуемого транспортного средства 100 км/ч, времени свободного пробега (время реакции водителя на торможение) 1,5; 0,66; 0,4 с и замедления 3,6; 5,3; 7,0 м/с.
|
X - относительная скорость (км/ч); Y - расстояние (м)
Рисунок А.6 - Отношение между относительной скоростью и расстоянием между транспортными средствами
А.5 Параметры расчетов
Данные значения параметров рекомендуется использовать для вычисления и
:
=1,5 c;
=0,4 с;
=3,6 м/с
.
Приложение В
(обязательное)
Обнаружение препятствий на непрямолинейных участках дорог
Системы с функцией предупреждения на непрямолинейных участках дорог должны иметь зону обнаружения препятствий, как показано на рисунке В.1.
|
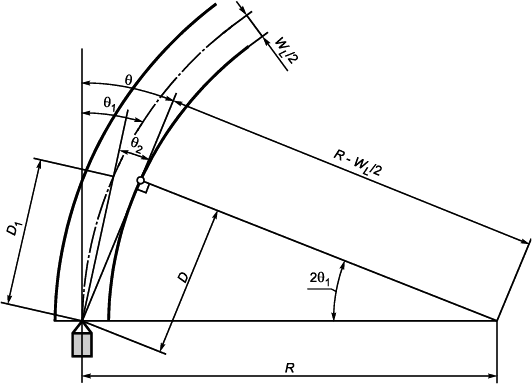
R - радиус кривизны (м); D - расстояние до препятствия (м); - угол обнаружения (°);
- ширина полосы (м)
Рисунок В.1 - Зона действия для систем классов I, II и III
В соответствии с рисунком В.1, D определяется в соответствии с уравнением:
![]() , (В.1)
, (В.1)
![]() . (B.2)
. (B.2)
Тогда
![]() . (В.3)
. (В.3)
По рисунку В.1 вычисляют с помощью равенства:
![]() . (В.4)
. (В.4)
Максимальный угол обнаружения вычисляется с помощью равенства:
![]() . (В.5)
. (В.5)
Таблица В.1 - Максимальный угол обнаружения
Значения параметров | Радиус кривизны (м) | ||||||
100 | 200 | 300 | 400 | 500 | 600 | 700 | |
Максимальное расстояние обнаружения, D (м) | 19,27 | 27,32 | 33,49 | 38,68 | 43,26 | 47,40 | 51,20 |
| 19,36 | 27,39 | 33,54 | 38,73 | 43,30 | 47,43 | 51,23 |
| 5,55 | 3,92 | 3,20 | 2,78 | 2,48 | 2,27 | 2,10 |
| 5,56 | 3,93 | 3,21 | 2,78 | 2,48 | 2,27 | 2,10 |
| 11,11 | 7,85 | 6,41 | 5,55 | 4,97 | 4,53 | 4,20 |
Приложение С
(обязательное)
Вычисление коэффициента отражения цели (мишени) испытаний при использовании лазера
С.1 Телесный угол
Телесный угол - это отношение площади освещаемого участка поверхности светом к квадрату радиуса сферы.
|
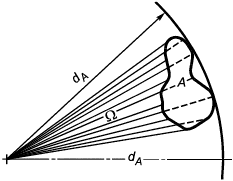
Рисунок С.1 - Телесный угол![]() ,
,
где - телесный угол, в стереорадианах;
А - освещенная площадь;
- расстояние между источником и освещенной поверхностью А;
- телесный угол источника [1 ср].
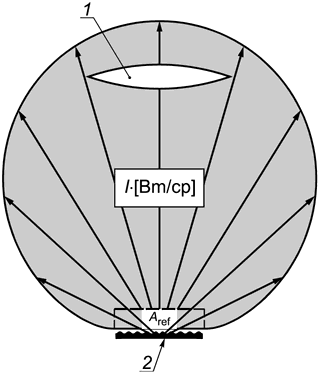
С.2 Интенсивность излучения
Интенсивность излучения дана в излучаемой энергии
, исходящей из источника излучения в границах телесного угла
.
![]() ,
,
где - интенсивность излучения в установленном направлении, исходящая от отражателя, измеренная перед поверхностью приемника [Вт/ср];
- излучаемая мощность [Вт];
- освещаемый телесный угол [ср].
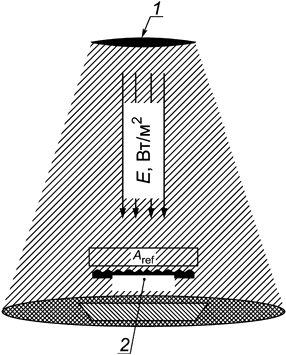
С.3 Интенсивность облучения Е
Интенсивность облучения - это отношение падающей на поверхность излученной энергии к площади освещенной поверхности. Е - это плотность освещения поверхности.
Интенсивность излучения [Вт/м
], полученная от трансмиттера на уровне мишени испытаний, определяется из соотношения
![]() ,*
,*
где - излучаемая мощность [Вт];
- освещенная поверхность [м
].
__________________
* Формула и экспликация к ней соответствуют оригиналу. - .
С.4 Коэффициент отражения мишени испытаний (RCTT)
![]() ,
,
где - интенсивность излучения в установленном направлении, исходящая от отражателя, измеренная на уровне мишени испытаний [Вт/ср];
- интенсивность излучения, полученная от трансмиттера на уровне мишени испытаний [Вт/м
];
RCTT - коэффициент отражения мишени испытаний [м/ср].
Для отражателя с определенным RCTT рекомендуется иметь весовой коэффициент отражения 8·10
ср.
RCTT (коэффициент отражения мишени испытаний) описывает только качество отражателя (ослабление). Для процедуры испытаний достаточно иметь угловой отражатель (уменьшение поверхности до "точки"). Но также возможно использовать большую поверхность отражения, если вся отражательная способность поверхности отражателя не превышает указанную величину.
|
1 - приемник; 2 - отражатель
Рисунок С.2 - Сценарий приемника
|
1 - трансмиттер; 2 - отражатель
Рисунок С.3 - Сценарий трансмиттера
|
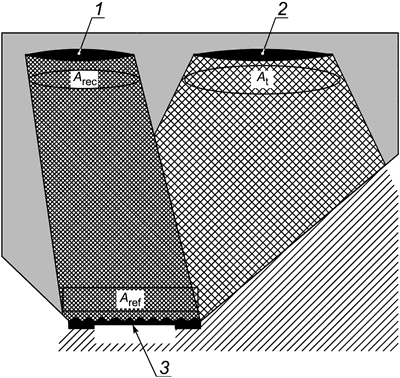
1 - приемник; 2 - трансмиттер; 3 - отражатель
Рисунок С.4 - Сценарий отражателя
Приложение D
(обязательное)
Геометрия мишени испытаний радиоволнового радара
Типичные мишени испытаний - это уголковые кубические отражатели и металлические сферы. Металлическая сфера имеет преимущество в стабильности измерений, но форму сферы трудно обрабатывать. Уголковые кубические отражатели, с другой стороны, компактны и легко настраиваемы в точках измерения, поэтому стандартная мишень испытаний может быть уголковым кубическим отражателем. Форма мишени испытаний показана на рисунке D.1.
|
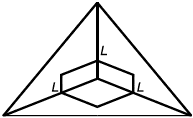
Рисунок D.1 - Геометрия отражателя цели испытаний типа угол куба
Общая формула для вычисления эффективной поверхности рассеяния (RCS):
![]() ,
,
где L - длина каждой стороны;
- длина волны центра передачи.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 825-1:1993 | IDT | ГОСТ 31581-2012 "Лазерная безопасность. Общие требования безопасности при разработке и эксплуатации лазерных изделий" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичный стандарт. | ||
Библиография
[1] | Johansson G., & Rumar К. | Driver's Brake Reaction Times. Hum. Factors. 1971, 13 (1) pp.23-27 |
[2] | ISO 22839 | Intelligent transport systems - Forward vehicle collision mitigation systems - Operation, performance, and verification requirements* |
[3] | ISO 15622:2002 | Transport Information and Control Systems - Adaptive Cruise Control Systems - Performance requirements and test procedures* |
[4] | ISO 22179 | Intelligent transport systems - Full speed range adaptive cruise control (FSRA) systems - Performance requirements and test procedures |
[5] | ISO 22178 | Intelligent transport systems - Low speed following (LSF) systems - Performance requirements and test procedures |
[6] | ISO 2575 | Road vehicles - Symbols for controls, indicators and tell-tales |
[7] | ISO 6161:1981 | Personal eye-protectors - Filters and eye-protectors against laser radiation |
[8] | ISO 15006 | Road vehicles - Ergonomic aspects of transport information and control systems - Specifications for in-vehicle auditory presentation |
[9] | ISO 15008 | Road vehicles - Ergonomic aspects of transport information and control systems - Specifications and test procedures for in-vehicle visual presentation |
________________ * Официальный перевод этого стандарта находится в Федеральном информационном фонде стандартов. | ||
УДК 004.73:006.354 | ОКС 35.240 |
Ключевые слова: интеллектуальные транспортные системы, транспортное средство, системы предупреждения столкновений, методы испытаний | |
Электронный текст документа
и сверен по:
, 2018
{kind=link}