ПНСТ 386-2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТАНОВЛЕНИЕ ОПРЕДЕЛЕНИЯ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ УХОДА С ПОЛОСЫ ДВИЖЕНИЯ, УСТАНАВЛИВАЕМОЙ НА КОЛЕСНЫЕ ТРАНСПОРТНЫЕ СРЕДСТВА КАТЕГОРИЙ M1, M2, M3, N1 И N2, УСТАНОВЛЕНИЕ КЛАССИФИКАЦИИ ТАКИХ СИСТЕМ, ОПРЕДЕЛЕНИЕ МИНИМАЛЬНЫХ ТРЕБОВАНИЙ К ФУНКЦИОНАЛЬНОСТИ ДАННЫХ СИСТЕМ, УСТАНОВЛЕНИЕ ТРЕБОВАНИЙ К ЧЕЛОВЕКО-МАШИННОМУ ИНТЕРФЕЙСУ (HMI) И ОПРЕДЕЛЕНИЕ МЕТОДОВ ИСПЫТАНИЙ ДАННЫХ СИСТЕМ
Establishment of the definition of the system for the prevention of the care from the band of movement installed on the wheeled vehicle of categories M1, M2, M3, N1 and N2, installation classification of such systems, determination of minimum requirements for the functionality of data systems, establishment of human-machine interface (HMI) requirements and determination of tests methods of data systems
ОКС 35.240.60
Срок действия с 2020-06-01
до 2023-06-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Научно-исследовательский институт интеллектуальных транспортных систем" (ООО "НИИ ИТС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 декабря 2019 г. N 63-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 17361-2017* "Интеллектуальные транспортные системы. Системы предупреждения об уходе с полосы движения. Требования к рабочим характеристикам и процедуры испытаний" (ISO 17361:2017 "Intelligent transport systems - Lane departure warning systems - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 125319, Москва, Ленинградский проспект, д.64 и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты", а также на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Основой систем предупреждения о покидании полосы движения (LDWS) служат базисные правила дорожного движения. Системы LDWS нацелены главным образом на оказание помощи водителю в ситуациях, когда необходимо удержать транспортное средство в границах полосы движения на автомагистралях и шоссе. При покидании полосы движения (например, вследствие невнимательности) водитель получает соответствующее предупреждение. Системы LDWS не предназначены для предупреждения о столкновении с другими транспортными средствами или управления движением транспортных средств.
1 Область применения
Настоящий стандарт распространяется на системы предупреждения ухода с полосы движения, устанавливаемой на колесные транспортные средства категорий M1, M2, M3, N1 и N2 и устанавливает требования к функциональности данных систем и к человеко-машинному интерфейсу (HMI).
Настоящий стандарт содержит общее описание характеристик, классификации, функций человеко-машинного интерфейса (HMI) и методов испытаний систем предупреждения о покидании полосы движения. Такие автомобильные системы могут предупредить водителя о покидании полосы движения на автомагистралях и шоссе. Рассматриваемая система выдает предупреждения, согласующиеся с видимой дорожной разметкой, используя оптические, электромагнитные, GPS или другие технологии обнаружения.
Выдача предупреждений на участках дорог, имеющих временную или неправильную дорожную разметку (например, зоны проведения дорожных работ), в настоящем стандарте не рассматривается.
Настоящий стандарт предназначен для применения к легковым автомобилям, коммерческому автотранспорту и автобусам.
Система не будет предпринимать никаких автоматических действий для предотвращения возможных уходов с полосы движения. Ответственность за безопасную эксплуатацию транспортного средства остается за водителем.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 видимая дорожная разметка (visible lane marking): Заранее размещенные на границе полосы движения ограничители, которые видны водителю во время движения.
2.2 видимость (visibility): Расстояние, на котором освещенность нерассеянного луча белого света с цветовой температурой 2700 К уменьшается до 5% от освещенности исходного источника света.
2.3 время до пересечения разделительной линии, TTLC (time to line crossing): Расчетное время до ухода с полосы движения.
Примечание - Например, простейшим методом расчета TTLC является деление поперечного расстояния (D) между определенной частью транспортного средства и границей полосы движения на скорость ухода (V_depart) транспортного средства относительно полосы движения (TTLC=D/V_depart).
2.4 второстепенный видимый дорожный объект (incidental visible road feature): Видимые элементы на поверхности дороги, которые не предназначены для определения границ полосы движения, но указывают положение полосы движения.
Примечание - К таким объектам относятся тротуары, бордюры и бровки.
2.5 граница полосы движения (lane boundary): Граница полосы движения, определяемая видимой дорожной разметкой.
Примечания
1 При отсутствии видимой дорожной разметки определяется второстепенными видимыми дорожными объектами или другими средствами, такими как GPS и т.д.
2 Граница видимой дорожной разметки находится в ее центре.
2.6 запрос на блокировку (suppression request): Запрос водителя или функция системы, предназначенные для блокировки действия системы LKAS в случае обнаружения преднамеренной смены полосы движения.
2.7 зона отсутствия предупреждения (no warning zone): Зона между двумя первыми предупредительными линиями.
2.8 индикация состояния (status indication): Указание состояния системы.
2.9 интервал порога предупреждения (warning threshold placement zone): Зона между первой и последней предупредительными линиями, в которой находится порог предупреждения.
Примечание - Существует один интервал порога предупреждения, охватывающий левую границу полосы движения, и один интервал порога предупреждения, охватывающий правую границу полосы движения (см. рисунок 1).
2.10 ложная тревога (false alarm): Сигнал тревоги, подаваемый, когда не соблюдены условия предупреждения.
2.11 первая предупредительная линия (earliest warning line): Ближайший к центральной линии порог предупреждения.
2.12 повторяемость (repeatability): Возможность определенной доли предупреждений, выдаваемых системой, последовательно попадать в заданный диапазон.
2.13 покидание полосы движения (lane departure): Уход с полосы движения через границу полосы движения.
2.14 полоса движения (lane): Область автодороги, предназначенная для беспрепятственного движения транспортного средства при отсутствии у водителя желания изменить траекторию перемещения.
2.15 порог предупреждения (warning threshold): Местоположение на дороге, где выдается предупреждение с учетом соответствующей пороговой точки предупреждения, заданной в системе.
Примечания
1 В случае TTLC порог предупреждения смещается в зависимости от скорости покидания.
2 Порог предупреждения находится в пределах интервала порога предупреждения (см. рисунок 1).
2.16 последняя предупредительная линия (latest warning line): Наиболее удаленный от центра порог предупреждения.
2.17 предупреждение об уходе с полосы движения (lane departure warning): Предупреждение, выдаваемое водителю согласно условию предупреждения о покидании полосы движения при отсутствии запросов на блокировку.
2.18 скорость отклонения; V_depart (rate of departure): Компонент скорости сближения транспортного средства под прямым углом к границе полосы движения.
2.19 срезание криволинейной траектории (curve cutting): Действие водителя, направляющего транспортное средство в направлении внутренней стороны траектории, что может привести к преднамеренному покиданию полосы движения.
2.20 стандартная ширина полосы движения (default lane width): Определенная ширина, заданная для полосы движения, когда видимая дорожная разметка существует только с одной стороны полосы движения и никакие другие границы полосы движения не обнаруживаются системой.
2.21 тактильное предупреждение (haptic warning): Предупреждение, стимулирующее контактное восприятие водителя посредством вибрации, усилия и движения.
Пример - Движение рулевого колеса, вибрация рулевого колеса, вибрация сиденья и вибрация педали.
2.22 точка выдачи предупреждения (warning issue point): Измеряемое местоположение и время, когда начинает выдаваться предупреждение.
2.23 условие предупреждения (warning condition): Условие, при котором происходит пересечение полосы движения через порог предупреждения.
Примечание - См. рисунок 2.
2.24 уход (departure): Ситуация, когда наружная сторона одного из передних колес транспортного средства или ведущей части тягача с полуприцепом (или, в случае трехколесного транспортного средства, наружная сторона одного из колес на оси с двумя колесами) пересекает указанную линию.
2.25 функциональная неспособность системы (system incapable): Состояние системы, которое вследствие временных условий не позволяет предупредить водителя о покидании полосы движения.
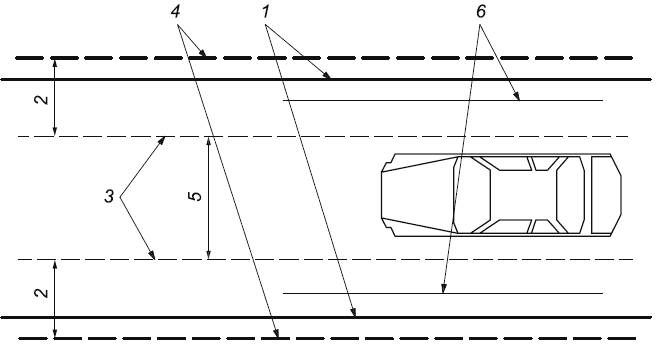 |
1 - граница полосы движения; 2 - интервал порога предупреждения; 3 - первая предупредительная линия; 4 - последняя предупредительная линия; 5 - зона отсутствия предупреждения; 6 - порог предупреждения (только для справки)
Рисунок 1 - Концепция порогов предупреждения и интервалов порога предупреждения
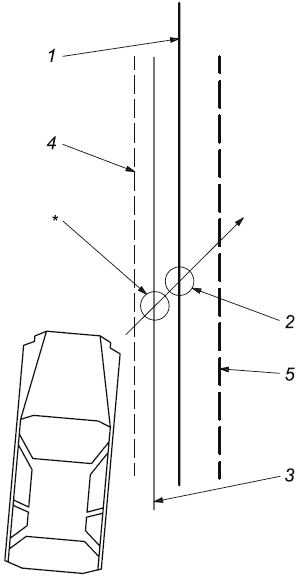 |
* Предупреждение о покидании полосы движения выдается при выполнении условия предупреждения и отсутствии запроса на блокировку.
1 - граница полосы движения; 2 - покидание полосы движения; 3 - порог предупреждения; 4 - первая предупредительная линия; 5 - последняя предупредительная линия
Рисунок 2 - Условия для выдачи предупреждения
3 Спецификации и требования
3.1 Функции системы
Функциональные элементы системы предупреждения о покидании полосы движения должны соответствовать схеме на рисунке 3.
Запрос на блокировку, определение скорости транспортного средства, предпочтение водителя и прочие дополнительные функциональные элементы необязательны.
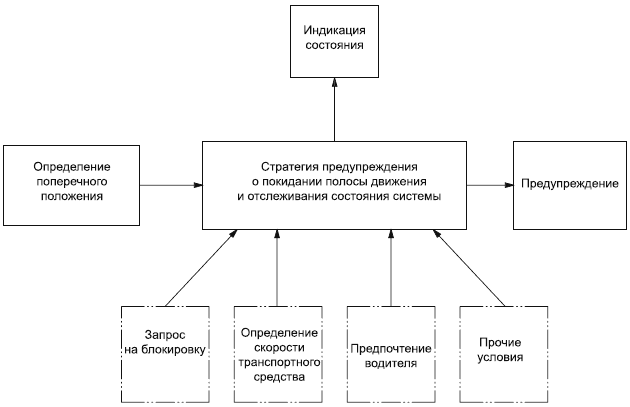 |
Рисунок 3 - Функциональные элементы
3.2 Классификация систем
Системы предупреждения о покидании полосы движения классифицируют согласно таблице 1. Такие системы должны оказаться в состоянии выдавать предупреждения по крайней мере при соблюдении одного из условий для радиуса кривизны, указанного в таблице 1.
Таблица 1 - Типы классификации
Параметр | Класс | |
| I | II |
Радиус кривизны, м | 500 | 250 |
Скорость транспортного средства, м/с | 20 | 17 |
3.3 Требования
3.3.1 Основные требования
Система должна обладать как минимум следующими функциями:
а) отслеживание состояния системы: сбой системы, функциональная неспособность системы и включение/выключение системы (если выключатель установлен);
б) предоставление водителю информации о состоянии системы;
в) определение поперечного положения транспортного средства относительно границы полосы движения;
г) проверка соблюдения условия предупреждения;
д) предупреждение водителя.
3.3.2 Эксплуатационные требования
Предъявляют следующие эксплуатационные требования:
а) система должна предупреждать водителя о соблюдении условия предупреждения;
б) последнюю предупредительную линию следует располагать на расстоянии 0,3 м от границы полосы движения для легковых автомобилей и 1 м от границы полосы движения для грузовиков и автобусов;
в) первую предупредительную линию следует располагать согласно рисунку 4 и таблице 2;
г) предупреждение должно последовательно выдаваться в отношении порога предупреждения;
д) сигналы ложной тревоги следует минимизировать и проверять;
е) система класса I должна работать на скоростях не менее 20 м/с, а система класса II - на скоростях не менее 17 м/с. Система может работать при более низких скоростях транспортного средства.
 |
D - максимальное расстояние внутри границы полосы движения, м; V - скорость покидания, м/с
Рисунок 4 - Местоположение первой предупредительной линии
Таблица 2 - Местоположение первой предупредительной линии
Скорость покидания V, м/с | Максимальное расстояние внутри границы полосы движения, м |
0,75 | |
1,5 · V | |
1,0<V | 1,5 |
TTLC умножается на скорость покидания. | |
3.3.3 Требования к человеко-машинному интерфейсу
К человеко-машинному интерфейсу предъявляют следующие требования:
а) представление предупреждений
Необходимо легко воспринимаемое тактильное и/или звуковое предупреждение;
б) помехи от предупреждений, формируемых другими системами.
Даже если транспортное средство оборудовано системой LDWS и другими системами предупреждения, такими как система предупреждения о столкновении с движущимся впереди транспортным средством (FVCWS), предупреждение должно четко различаться водителем по тактильной, звуковой или визуальной модальности или любой их комбинации;
в) индикация состояния системы
Водителю должна предоставляться информация о состоянии системы.
Индикация состояния системы должна легко восприниматься водителем.
Водитель должен быть информирован как об обнаружении сбоя во время включения или работы системы, так и об обнаружении функциональной неспособности системы во время ее работы.
Для уведомления водителя должны использоваться стандартные условные знаки. Например, информирование о наличии функциональной неспособности системы должно осуществляться с использованием стандартного условного знака, предусмотренного для предупреждения о таком состоянии;
г) в руководстве пользователя необходимо указывать минимальную скорость транспортного средства, при которой работает система, и условия функциональной неспособности системы
3.4 Дополнительные функции
Ниже перечислены дополнительные функции систем предупреждения о покидании полосы движения:
а) система LDWS может оснащаться средствами контроля включения/выключения системы, которые могут управляться водителем при любых условиях;
б) система LDWS может принимать запрос на блокировку, чтобы минимизировать выдачу мешающих предупреждений. Запрос на блокировку подается, в тех случаях, когда водитель включает указатель поворота, выполняет торможение или участвует в других маневрированиях с высоким приоритетом, таких как маневрирование с целью предотвратить столкновение;
в) система LDWS может информировать водителя о блокировке предупреждений;
г) скорость транспортного средства может определяться для различных целей, в том числе чтобы заблокировать предупреждения при движении со скоростями ниже определенных значений;
д) на дорогах с односторонней дорожной разметкой система LDWS может использовать стандартную ширину полосы движения, чтобы определить предполагаемую дорожную разметку на противоположной стороне от видимой дорожной разметки во время выдачи предупреждений или проинформировать водителя о функциональной неспособности системы;
е) порог предупреждения может регулироваться в соответствующем ему интервале;
ж) во время движения по криволинейной траектории система может отодвигать порог предупреждения, что позволяет срезать криволинейную траекторию, но порог предупреждения никогда не должен выходить за последнюю предупредительную линию;
и) если используются только тактильные и/или звуковые предупреждения, система выдачи предупреждений может указывать направление ухода с полосы движения (положение источника звука, направление движения и т.д.). Если тактильные и/или звуковые предупреждения не предназначены для указания направления, предупреждения могут дополняться визуальной информацией;
к) система LDWS может блокировать дополнительные предупреждения, чтобы избежать многочисленных мешающих предупреждений.
4 Методика испытаний
4.1 Условия испытательной среды
Предъявляются следующие требования:
а) испытания необходимо проводить на ровной, сухой асфальтированной или бетонной поверхности;
б) температура должна находиться в диапазоне 10°С±30°С;
в) видимая дорожная разметка места проведения испытаний должна быть в хорошем состоянии и учитывать национальные стандарты видимой дорожной разметки. Кроме того, разметку следует наносить с учетом применимых стандартов для структуры и материалов дорожной разметки;
г) дальность видимости в горизонтальном направлении должна превышать 1 км.
4.2 Условия испытательной трассы
4.3 Требования в отношении испытуемого транспортного средства
Полная снаряженная масса испытуемого транспортного средства вместе с водителем и испытательным оборудованием (общая масса водителя и испытательного оборудования не более 150 кг) не должна превышать максимально разрешенную суммарную массу. После начала процедуры испытания не допускаются никакие изменения.
Примечания
1 Полная снаряженная масса транспортного средства определяется с учетом смазочных материалов, охлаждающей жидкости, жидкости стеклоомывателя, топлива, запасного колеса, огнетушителя, стандартных запасных частей, колодок и стандартного набора инструментов.
2 Максимально допустимая суммарная масса определяется административным органом власти.
4.4 Установка и настройка испытуемой системы
Систему LDWS следует устанавливать и настраивать согласно рекомендациям производителя. Каждое испытание системы LDWS с настраиваемым пользователем порогом предупреждения следует выполнять дважды: один раз с порогом предупреждения, соответствующим первой предупредительной линии, а второй раз с порогом предупреждения, соответствующим второй предупредительной линии. Система не должна изменяться после начала процедуры испытания.
4.5 Процедура испытаний
4.5.1 Параметры, определяемые на основе собранных данных
На основе собранных данных можно определить значения следующих параметров:
а) точка выдачи предупреждения;
б) скорость ухода;
в) скорость транспортного средства.
Необходимо регистрировать все предупреждения, выдаваемые во время испытаний. Данные должны извлекаться устройством, которое не принадлежит системе. Точность испытательного устройства должна указываться в отчете об испытаниях.
4.5.2 Методика
4.5.2.1 Общие положения
Следует проводить испытания трех типов:
- испытание на выдачу предупреждений при движении по криволинейной траектории согласно классификации кривых (испытание на выдачу предупреждений);
- испытание на повторяемость при движении по прямолинейной траектории (испытание на повторяемость);
- испытание на выдачу сигналов ложной тревоги (испытание на ложную тревогу).
4.5.2.2 Испытание на выдачу предупреждений
Место начала испытания должно находиться приблизительно в центре полосы движения.
После начала перемещения транспортного средства по траектории и обеспечения его стабильного положения транспортное средство должно незначительно отклоняться относительно траектории перемещения согласно классификации криволинейных траекторий, на скорости от 20 до 22 м/с для класса I и от 17 до 19 м/с для класса II. Транспортное средство должно смещаться однократно вправо и влево для обоих диапазонов скорости покидания (от 0 до 0,4 м/с и от 0,4 до 0,8 м/с) на поворотах влево и вправо. Всего необходимо проверить восемь смен полосы движения (см. таблицу 3 и рисунок 5).
Таблица 3 - Испытание на выдачу предупреждений
Скорость покидания, | Правосторонний поворот | Левосторонний поворот | ||
м/с | Смена полосы влево | Смена полосы вправо | Смена полосы влево | Смена полосы вправо |
0-0,4 | Одно испытание | Одно испытание | Одно испытание | Одно испытание |
0,4-0,8 | Одно испытание | Одно испытание | Одно испытание | Одно испытание |
4.5.2.3 Испытание на повторяемость
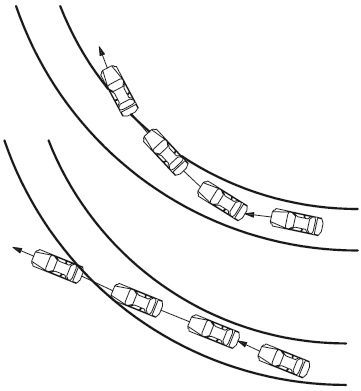 |
Рисунок 5 - Метод проведения испытания на выдачу предупреждений
Таблица 4 - Испытание на повторяемость
Скорость покидания, м/с | Направление ухода | |
| Влево | Вправо |
Группа 1 четыре испытания | Группа 2 четыре испытания | |
Группа 3 четыре испытания | Группа 4 четыре испытания | |
4.5.2.4 Испытание на ложную тревогу
Система не должна выдавать никаких предупреждений при движении в зоне отсутствия предупреждения на расстоянии 1000 м по прямолинейной траектории (выполняется на одном участке протяженностью 1000 м или на двух участках длиной 500 м).
4.6 Критерии прохождения испытаний
4.6.1 Испытание на выдачу предупреждений
Система должна выдавать предупреждения во время каждого испытания до пересечения последней предупредительной линии, но не до пересечения первой предупредительной линии.
 |
Рисунок 6 - Метод проведения испытания на повторяемость
4.6.2 Испытание на повторяемость
Система должна выдавать предупреждения в зоне шириной 30 см для каждой тестовой группы. Предупреждения не должны выдаваться вне интервала порога предупреждения. Если конкретная группа испытаний предусматривает более четырех испытаний в пределах требуемого интервала допусков скорости, необходимо учитывать только первые четыре испытания, которые укладываются в требуемый интервал допусков скорости.
4.6.3 Испытание на ложную тревогу
Никакие предупреждения не должны выдаваться между двумя первыми предупредительными линиями.
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: интеллектуальные транспортные системы, электронный сбор платы за проезд, архитектура систем сбора платы за проезд, бортовое оборудование | |
{kind=link}