ПНСТ 637-2022
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
ЧАСТИЧНО АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ПАРКОВКИ
Требования к эксплуатационным характеристикам и методы испытания
Intelligent transport systems. Partially automated parking systems. Performance requirements and test procedures
ОКС 03.220.20
Срок действия с 2022-08-01
до 2025-08-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "ТранснавиСофт" (ООО "ТранснавиСофт") совместно с федеральным государственным бюджетным образовательным учреждением высшего образования "Московский автомобильно-дорожный государственный технический университет (МАДИ)"
(Поправка. ИУС N 7-2022).
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 1 февраля 2022 г. N 11-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 20900-2019* "Интеллектуальные транспортные системы. Частично автоматизированные парковочные системы. Требования к рабочим характеристикам и процедуры испытаний" (ISO 20900:2019 "Intelligent transport systems - Partially automated parking systems (PAPS) - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 127083 Москва, ул.Мишина, д.35, и в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
ВНЕСЕНА поправка, опубликованная в ИУС N 7, 2022 год, введенная в действие с 29.05.2022
Введение
Частично автоматизированные системы парковки выполняют парковочные маневры, контролируя продольное и боковое движение транспортного средства, чтобы снизить нагрузку на водителя. Информация о предполагаемом парковочном месте должна быть доступна с помощью бортовых датчиков и, возможно, из внешних инфраструктурных источников информации до начала работы системы, чтобы определить путь, по которому необходимо следовать.
Система состоит из устройства ввода команд водителя и бесконтактных датчиков для получения внешней информации. Кроме того, система обеспечивает автоматическое управление движением, тормозом, трансмиссией и рулевым управлением для выполнения маневров транспортного средства в предполагаемом относительном положении и останавки в определенных пределах без непосредственных манипуляций водителя.
Человеко-машинный интерфейс (HMI) предоставляет информацию системы водителю. Функция парковки инициируется командой водителя. Система контролирует близость автомобиля к другим объектам, чтобы обнаружить и избежать опасности. Поведение транспортного средства и условия безопасности контролирует водитель.
Водитель может отменить/остановить работу системы в любое время, когда это необходимо.
1 Область применения
Настоящий стандарт устанавливает минимальные функциональные требования к частично автоматизированным системам парковки, которые производитель должен принять во внимание.
Возможная конфигурация системы включает в себя следующие два типа:
- Тип 1: система, контролируемая водителем, находящимся на месте водителя;
- Тип 2: система, контролируемая водителем (находящимся внутри или снаружи транспортного средства), который не обязательно находится на месте водителя. Транспортное средство остается в пределах прямой видимости водителя.
Для обоих типов систем рассматриваются минимальные требования и условия безопасности, производительности и функционирования, включая описание содержания человеко-машинного интерфейса и рабочих состояний системы.
Требования включают наличие водителя, обязанностью которого является контроль безопасности во время маневров системы. Требования к испытаниям системы также учитываются, включая критерии, методы и условия испытаний.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 частично автоматизированная система парковки; ЧАСП: Система, способная измерять размеры места для парковки/слота/гаража, расчитывать траекторию выполнения бокового и продольного (продольного в обоих направлениях) управления транспортным средством при маневрировании в пространстве/слоте/гараже и предоставлять необходимые инструкции водителю.
2.2 парковочное место: Область, которая существует между двумя граничащими транспортными средствами и доступна для парковки.
2.3 парковочный слот: Выделенное место, которое обозначено линиями или разметкой и доступно для парковки.
2.4
гараж: Здание и сооружение, помещение для стоянки (хранения) ремонта и технического обслуживания автомобилей, мотоциклов и других транспортных средств; может быть как частью жилого дома (встроенно-пристроенные гаражи), так и отдельным строением. [СП 113.13330.2016, статья 3.3] |
2.5 парковочный маневр: Операция по перемещению автомобиля на парковочное место/слот/в гараж.
2.6 маневр выезда: Операция по перемещению транспортного средства из пространства/слота/гаража.
2.7 обычный водитель: Водитель, сидящий на месте водителя и способный контролировать безопасную эксплуатацию транспортного средства.
2.8 удаленный водитель: Водитель, который управляет ЧАСП с помощью устройства дистанционного управления.
Примечание - Удаленный водитель может сидеть в автомобиле.
2.9 автоматизированный парковочный маневр: Автоматизированное управление продольным и поперечным движением автомобиля с помощью ЧАСП во время парковочного маневра, когда водитель только наблюдает за маневром автомобиля.
2.10 автоматический маневр выезда: Автоматическое управление движением автомобиля в поперечном и продольном направлении с помощью системы ЧАСП во время маневра выезда под наблюдением водителя.
2.11 активация системы: Действие по переводу работы системы из состояния готовности системы в активное состояние.
2.13 пограничный автомобиль: Транспортное средство, которое ограничивает парковочное место.
2.14 автомобиль с ЧАСП: Транспортное средство, которое оборудовано ЧАСП.
3 Определение типов и требований к ЧАСП
3.1 Типы ЧАСП
Для использования ЧАСП водитель управляет транспортным средством до тех пор, пока не будет определено место для парковки.
После этого, пока операция парковки не будет завершена, система выполняет все операции, необходимые для парковки транспортного средства, такие как рулевое управление, ускорение, торможение, переключение передач и включение стояночного тормоза.
Следующие два типа ЧАСП определены в этом стандарте на основе сценариев, в которых система контролируется водителем, находящимся в транспортном средстве на месте водителя, или контролируется дистанционно удаленным водителем, который не обязательно находится на месте водителя.
3.2 Основные функциональные возможности системы
3.2.1 Типы систем ЧАСП
Тип 1 - Система контролируется обычным водителем, находящимся на месте водителя:
- система должна контролироваться водителем, сидящим в автомобиле;
- водитель запрашивает автоматические парковочные маневры;
- система ищет парковочные места/слоты/гаражи;
- поиск может быть инициирован автоматически или водителем;
- система, контролируется водителем, сидящим на месте водителя;
- в обоих случаях система должна информировать водителя о том, что она определила возможное парковочное место/место/гараж;
- если идентифицировано несколько возможных парковочных мест/слотов/гаражей, система должна предоставить водителю информацию о возможных вариантах, и водитель может выбрать один из вариантов;
- в случае, когда водитель не выбирает какой-либо из вариантов из множества парковочных мест/слотов/гаражей, определенных ЧАСП, поиск может продолжаться.
С помощью автоматического управления движением, тормозом, трансмиссией и рулевым управлением система должна перемещать транспортное средство, парковать транспортное средство на выбраном парковочном месте/в слоте/в гараже, в установленных пределах точности местоположения, и заканчивать управление.
3.2.1.1 Системные реакции для системы типа 1
Системные реакции, соответствующие действиям водителя, указаны в таблице 1.
Таблица 1 - Системные реакции, соответствующие действиям водителя
Действия водителя | Соответствующие системные реакции |
Перевод главного выключателя в положение ВЫКЛ | Отменить парковочный маневр, сообщить об этом водителю, затем остановить автомобиль |
Перевод трансмиссии в состояние "парковка" | |
Ускорение | Отменить парковочный маневр. В случае отмены, информировать водителя об отмене |
Другие операции управления трансмиссией | Остановить автомобиль и проинфоровать водителя |
Воздействие на рулевое управление. Минимальный крутящий момент, перекрывающий действия системы, и применяемый обычным водителем к рулевому колесу, определяется изготовителем транспортного средства. Типичное значение может составлять 5 Нм | |
Торможение | Когда величина торможения водителем превышает величину торможения, генерируемую системой, система работает в соответствии с величиной торможения, определяемой водителем |
В этом случае система автоматически останавливает движение транспортного средства и предоставляет водителю информацию, которая указывает как на приостановку управления системой, так и на действия, которые должен предпринять водитель. После соблюдения требований водителя, в зависимости от концепции изготовителя транспортного средства или выбора водителя, система может перезапустить автоматическое управление либо прекратить его. | |
3.2.2 Тип 2. Система, контролируемая удаленным водителем
3.2.2.1 Общие положения
Существует два основных сценария: въезд на парковочное место/в слот/в гараж и выезд из гаража/перпендикулярного парковочного места/слота.
3.2.2.2 Въезд на парковочное место/в слот/в гараж
Система ищет парковочные места/слоты/гаражи. Поиск может быть инициирован водителем. Система должна информировать водителя о том, что она определила одно или несколько возможных парковочных мест/слотов/гаражей. Система также может быть активирована после того, как водитель припаркует автомобиль прямо (например, в одном метре) перед гаражом/слотом/перпендикулярным парковочным местом. Если идентифицировано несколько возможных парковочных мест/слотов/гаражей, система должна представить информацию о вариантах парковки. Система предлагает парковочное место/слот/гараж, а водитель должен выбрать предполагаемое парковочное место/слот/гараж среди возможных вариантов. Предлагаемое парковочное место/слот/гараж можно использовать, если водитель не делает выбор.
Водитель передает управление на устройство дистанционного управления, когда транспортное средство остановлено. Затем удаленный водитель активирует парковочный маневр с помощью устройства дистанционного управления. Только когда удаленный водитель даст команду с помощью устройства дистанционного управления на управление движением транспортного средства, система должна автоматически припарковать транспортное средство на выбранном парковочном месте/слоте/в гараже в установленных пределах точности определения местоположения. Транспортное средство останавливается, когда будет достигнуто конечное парковочное положение или когда удаленный водитель отключит систему с помощью устройства дистанционного управления.
3.2.2.3 Выезд из гаража/перпендикулярного парковочного места/слота
Система должна начать маневр выезда, когда она получит и подтвердит получение запроса на маневр выезда от удаленного водителя. Только при условии, что водитель даст команду с помощью устройства дистанционного управления на выполнение маневра, система должна автоматически управлять транспортным средством, перемещая транспортное средство из парковочного места/слота/гаража с установленными пределами точности определения местоположения. Транспортное средство должно останавиться, когда будет достигнуто указанное положение или когда удаленный водитель отключит систему с помощью устройства дистанционного управления.
3.2.2.4 Системные реакции для системы типа 2
Реакции системы, соответствующие действиям удаленного водителя и при возникновении сбоя, указаны в таблицах 2 и 3.
Таблица 2 - Системные реакции для системы типа 2, соответствующие командам удаленного водителя
Действие удаленного водителя | Соответствующие системные реакции |
Перевод главного выключателя в положение ВЫКЛ (если доступно на удаленном устройстве) | Остановить автомобиль и отменить автоматическое управление системой |
Зажигание выключено | |
Дверь или багажник транспортного средства открываются, когда удаленный водитель дает команду двигаться с помощью устройства дистанционного наблюдения | Остановить автомобиль . Когда условие устранено, система может продолжить парковочный маневр |
В этом случае система должна немедленно остановить движение транспортного средства и предоставить удаленному водителю информацию, которая указывает на отмену управления системой. В этом случае система должна немедленно остановить движение транспортного средства и предоставить удаленному водителю информацию, которая указывает на отмену управления системой. После соблюдения требований водителя, в зависимости от концепции производителя транспортного средства или выбора водителя, система может снова включить автоматическое управление либо прекратить его. | |
Таблица 3 - Системные реакции для системы типа 2 при сбоях системы
Системная ошибка | Соответствующие системные реакции |
Расстояние между удаленным приводом и автомобилем превышает пороговое значение, определенное разработчиком системы | Остановить автомобиль . Когда ситуация, приведшая к ошибке, будет |
Связь между удаленным устройством и системой прервана из-за искажения данных | исправлена, система может продолжить маневр при парковке/выезде |
В этом случае система должна немедленно остановить движение транспортного средства и предоставить удаленному водителю информацию, которая указывает на отмену управления системой. После выполнения команды водителя, в зависимости от концепции производителя транспортного средства или выбора водителя, система может снова включить автоматическое управление либо прекратить его. | |
3.3 Общие требования
3.3.1 Максимальная скорость во время работы
Система должна работать только до скорости 10 км/ч (допуск +2 км/ч).
3.3.2 Условия прекращения работы ЧАСП
ЧАСП должна прервать автоматическую парковку/выезд при обнаружении сбоя системы.
Система должна отменить автоматическое управление и предоставить информацию водителю при обнаружении неисправностей.
3.3.3 Руководство пользователя
Рекомендуется, чтобы руководство пользователя транспортного средства (руководство по эксплуатации) содержало инструкцию, в которой четко указано, как использовать систему, а также описание критериев прерывания или приостановки действия системы, ответственности водителя и ограничений системы.
В руководстве следует особо подчеркнуть ответственность водителя за безопасность во время работы системы. Водитель несет ответственность за выявление препятствий и других возможных опасностей, которые не могут быть обнаружены ЧАСП. В случае парковки в гараж/перпендикулярное место/слот водитель должен обеспечить достаточную глубину места для парковки.
4 Функциональные и эксплуатационные требования для ЧАСП
4.1 Поддерживаемые типы парковки
ЧАСП должна поддерживать один или несколько вариантов парковки:
- параллельное парковочное место;
- параллельный парковочный слот;
- перпендикулярное парковочное место;
- перпендикулярный парковочный слот;
- парковочное место в гараже.
4.1.1 Параллельное парковочное место
Минимальным требованием является выполнение парковочного маневра на параллельное парковочное место, ограниченное одним или всеми из следующих объектов:
- два пограничных транспортных средства;
- (опция) бордюр в качестве боковой привязки.
Рекомендуется, чтобы система была в состоянии обнаружить эталонный бордюр, показанный на рисунке 9.
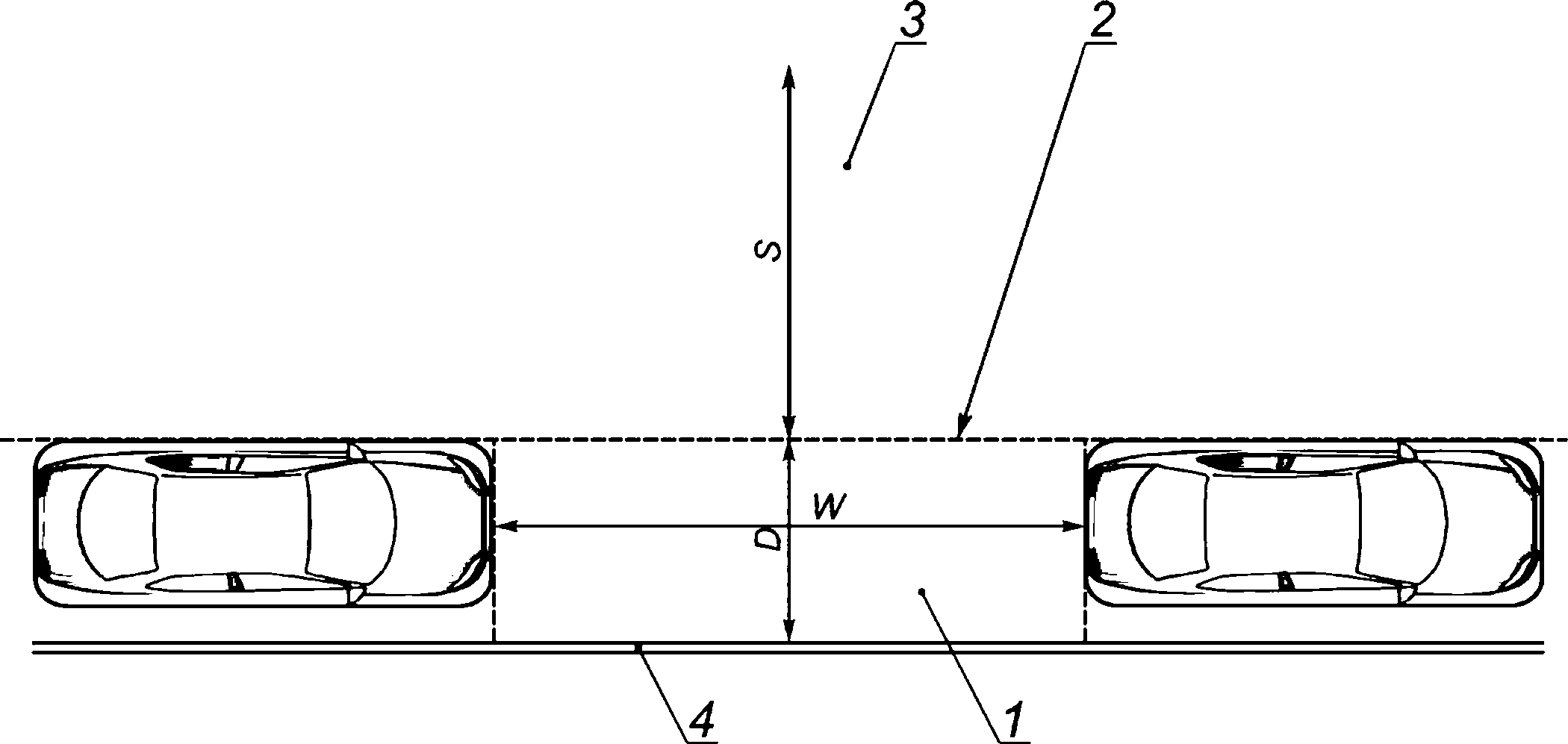
Место для парковки определяется его шириной W и глубиной D, как показано на рисунке 1.
W - расстояние между двумя граничащими транспортными средствами.
Глубина D - это расстояние между боковой контрольной линией и шириной автомобиля ЧАСП+0,2 м без учета боковых зеркал.
Транспортное средство, управляемое ЧАСП, должно оставаться в зоне, где разрешено управление ЧАСП, как показано на рисунке 1. Также важно, чтобы пользователи знали, как система выполняет маневр при парковке и ее пределы функционирования.
 |
1 - целевая парковка; 2 - боковые опорные линии; 3 - область, где разрешено управление ЧАСП; 4 - бордюр (опция)
D глубина пространства=ширина автомобилей с ЧАСП+0,2 м без учета боковых зеркал;
S - ширина зоны, где разрешено управление ЧАСП=4,5 м.
Рисунок 1 - Геометрия параллельного парковочного места
Описание того, как работает система, и возможные помехи окружающим предметам должны быть как минимум указаны в руководстве пользователя.
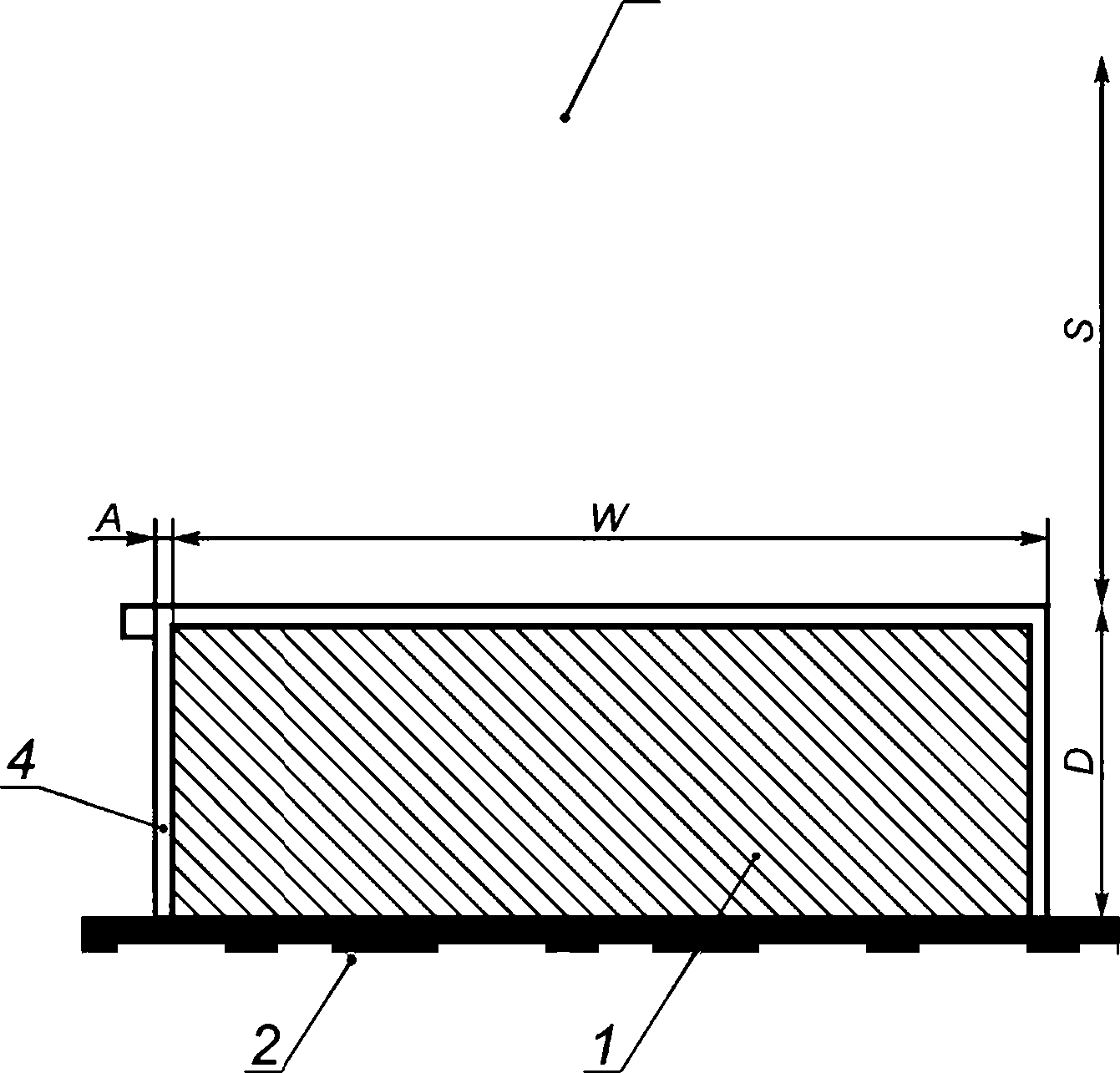
4.1.2 Параллельное парковочное место
В качестве минимального требования парковочный маневр должен выполняться с парковочным местом, удовлетворяющим следующим требованиям:
Контрастная маркировка на поверхности земли должна иметь минимальный коэффициент контрастности 5 (пять). Рекомендуемые рисунок и размер маркировки показаны на рисунке 2.
 |
1 - целевая парковка; 2 - край дороги; 3 - область, где управление ЧАСП разрешено; 4 - парковочное место;
W - ширина парковочного места (7,0 м); A - ширина линии парковочного места (0,15 м); D - глубина парковочного места (2,5 м); S - ширина области, где разрешено управление ЧАСП (4,5 м)
Рисунок 2 - Геометрия параллельного парковочного места
Транспортное средство, управляемое ЧАСП, должно оставаться в зоне, где разрешено управление ЧАСП, как показано на рисунке 2. Также важно, чтобы пользователи знали, как система выполняет маневр при парковке и ее пределы функционирования. Описание того, как работает система и возможное взаимодействие с окружающими объектами, должно быть, как минимум, указано в руководстве пользователя.
4.1.3 Перпендикулярное парковочное пространство
Минимальным требованием является выполнение маневров парковки/выезда для парковочного места со следующим ограничением: два пограничных транспортных средства.
Транспортное средство, управляемое ЧАСП, должно оставаться в зоне, где разрешено управление ЧАСП, как показано на рисунке 3.
Также важно, чтобы пользователи знали, как система выполняет маневр при парковке/выезде и пределы ее функционирования.
Описание того, как работает система, и возможное взаимодействие с окружающими предметами должны быть, как минимум, указаны в руководстве пользователя. Детали целевой области парковки показаны на рисунке 15.
 |
1 - целевая парковка; 2 - область, где контроль ЧАСП разрешен;
Рисунок 3 - Геометрия перпендикулярного парковочного места
4.1.4 Перпендикулярное парковочное место
Минимальные требования, при которых должен выполняться парковочный/выездной маневр с перпендикулярным парковочным местом, ограничены следующим.
Контрастная маркировка на поверхности земли должна иметь минимальный коэффициент контрастности 5 (пять). Рекомендуемые значения параметров и размер маркировки показаны на рисунке 4.
Транспортное средство, управляемое ЧАСП, должно оставаться в зоне, где разрешено управление ЧАСП, как показано на рисунке 4. Также важно, чтобы пользователи знали, как система выполняет маневр при парковке/выезде, и свой предел производительности. Описание того, как работает система, и возможные взаимодействия с окружающими предметами должны быть, как минимум, указаны в руководстве пользователя. Детали целевой области парковки показаны на рисунке 16.
 |
1 - целевая парковка; 2 - центр линии слота; 3 - область, где разрешен контроль ЧАСП; 4 - слот;
________________
Примечание - Минимальным требованием к поверхности парковочного места является ровная асфальтированная поверхность.
Рисунок 4 - Геометрия перпендикулярного парковочного места
4.1.5 Парковочное пространство в гараже
В качестве минимального требования маневр парковка/выезд должен выполняться в обычном гараже, который определяется следующим образом:
- гаражные ворота;
- передняя, боковые и задняя стены гаража.
 |
________________
Рисунок 5 - Геометрия гаражных ворот
 |
1 - целевая парковка; 2 - внутренняя линия гаража;
Рисунок 6 - Геометрия гаража, вид сверху
4.2 Рабочие состояния и пользовательский интерфейс
4.2.1 Парковочный маневр
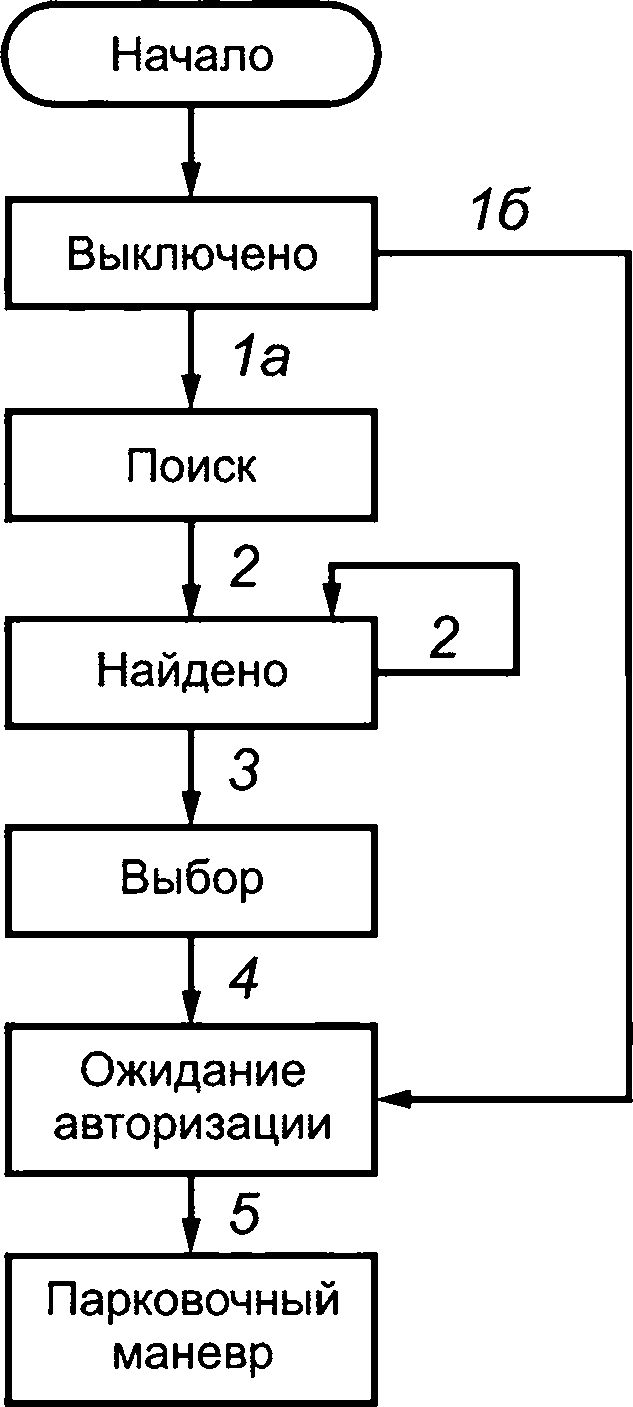
На рисунке 7 показан пример последовательности рабочих состояний для случая парковочного маневра, соответствующая информация, представляемая водителю в каждом рабочем состоянии, и действия, требуемые от водителя.
 |
Рисунок 7 - Диаграмма рабочих состояний ЧАСП при парковочном маневре
После активации системы система переходит из состояния "Выключено" в состояние "Поиск" и начинает поиск парковок/слотов/гаражей, оценивает обнаруженные объекты и генерирует информацию обратной связи с водителем.
Система может переключать свое рабочее состояние между "Поиск", "Найдено", "Выбрать" и "Ожидание авторизации". Если система находится в состоянии "Ожидание авторизации" и водитель дает разрешение на выполнение парковки, система переходит в состояние "Парковочный маневр" и автоматически выполняет маневр парковки.
4.2.1.1 Состояние "Выключено"
Система запускается из выключенного состояния.
Система должна сообщить водителю, что система готова к использованию.
Если система недоступна из-за сбоя или по другим причинам, водитель должен быть проинформирован о таком состоянии системы.
Когда условия, указанные производителем, выполнены (например, когда водитель нажимает кнопку или скорость транспортного средства опускается ниже порогового значения), система переходит в состояние поиска.
В случае, если система активируется после того, как водитель припаркует транспортное средство перед гаражом/перпендикулярным парковочным местом/слотом, система может перейти в состояние "Ожидание авторизации".
4.2.1.2 Состояние "Поиск"
Система должна искать возможные парковочные места/слоты/гаражи. Когда система находит пространство/слот/гараж или получает такую информацию, система переходит в состояние "Найдено".
4.2.1.3 Состояние "Найдено"
Состояние "Найдено" - это состояние, в котором система обнаружила одно или несколько возможных парковочных мест/слотов/гаражей.
Система должна информировать водителя об одном или нескольких парковочных местах/слотах/гаражах, обнаруженных в результате поиска.
Когда указанные производителем условия выполнены (например, когда водитель остановил транспортное средство), система переходит в состояние выбора.
Для систем типа 2 в этот момент водитель может выйти из транспортного средства и использовать устройство дистанционного управления для продолжения парковки. Если парковочное место/слот/гараж узкие, система может сообщить водителю о том, что он должен выйти из транспортного средства.
4.2.1.4 Состояние "Выбор"
Когда система обнаружила только одно парковочное пространство/слот/гараж, система выбирает его для парковки.
Когда система обнаружила два или более пространства/слота/гаража, в зависимости от технических характеристик производителя, водитель или система могут выбрать один из них.
Для систем типа 2 в этот момент водитель может выйти из транспортного средства и использовать устройство дистанционного управления для выполнения маневра парковки. Если парковочное место/слот/гараж узкие, система может сообщить водителю о том, что он должен выйти из транспортного средства.
4.2.1.5 Состояние "Ожидание авторизации"
Это состояние, в котором система ожидает от водителя авторизации для выполнения автоматического маневра.
Для систем типа 2 в этот момент водитель может выйти из транспортного средства и использовать устройство дистанционного управления для дальнейшей парковки. Если ширина парковочного места/ слота/гаража очень узкая, система может сообщить водителю, что водитель должен выйти из транспортного средства.
Когда заданные производителем условия выполнены (например, когда водитель нажимает кнопку) и водитель дает разрешение системе перемещать транспортное средство, система переходит в состояние Парковочный маневр".
4.2.1.6 Состояние "Парковочный маневр"
Когда получено разрешение от водителя на выполнение парковочного маневра, система должна управлять двигателем, тормозом, трансмиссией и рулевым управлением для перемещения транспортного средства на выбранное парковочное место/в слот/в гараж. Для систем типа 1 водитель должен указать намерение продолжить управление системой. Для систем типа 2 удаленный водитель должен постоянно указывать намерение продолжить управление системой. В качестве примера, система должна обладать функциональностью для непрерывного управления, когда удаленный водитель постоянно нажимает на переключатель команд и система приостанавливает управление, когда удаленный водитель отпускает переключатель.
В процессе управления движением транспортного средства системой, следует избегать столкновений с объектами в окружающей зоне. Когда система обнаруживает какие-либо препятствия, она должна сообщить водителю о возможности столкновения. Вмешательство или действие водителя, позволяющее избежать столкновения, в любой момент отменяет работу системы. Если препятствие устранено, система ЧАСП может продолжить маневр, как только водитель даст разрешение. Когда транспортное средство достигает конечного целевого положения, система должна остановить транспортное средство, оставить автомобиль в неподвижном состоянии и одновременно информировать водителя о завершении управления.
Для систем типа 1 система должна перейти в состояние "Выключено" после завершения парковки.
Для систем типа 2, когда управление завершено с подтверждением завершения удаленным водителем, система должна перейти в состояние "Выключено". Может быть выполнена команда выключения двигателя или блокировки двери.
4.2.2 Маневр выезда для систем типа 2
На рисунке 8 показан пример последовательности рабочих состояний для случая маневра выезда.
 |
1 - дистанционное действие водителя (например, главный выключатель включен); 2 - удаленная авторизация водителем (например, нажатием кнопки); 3 - маневр выезда завершен или отменен
Рисунок 8 - Диаграмма ЧАСП рабочих состояний при маневре выезда
После активации системы система переходит из состояния "Выключено" в состояние "Ожидание авторизации", и система ожидает авторизации удаленным водителем.
Когда удаленный водитель выполняет авторизацию системы, система переходит в состояние "Маневр выезда", и автоматически выполняет маневр выезда.
4.2.2.1 Состояние "Выключено"
Система запускается из состояния "Выключено". Система должна сообщить удаленному водителю, что система готова к использованию. Если система недоступна из-за сбоя или по другим причинам, удаленный водитель должен быть проинформирован о таком состоянии системы.
Когда команда удаленного водителя на запуск двигателя получена и подтверждена через удаленное устройство, система ЧАСП типа 2 может предложить удаленному водителю автоматическое выполнение функции выезда.
4.2.2.2 Состояние "Ожидание авторизации"
В состоянии "Ожидание авторизации" система ожидает авторизации от удаленного водителя на автоматическое выполнение парковочного маневра.
Система должна иметь возможность перемещать транспортное средство из припаркованного положения без столкновения в положение, при котором удаленный водитель может войти в транспортное средство. Если система может выполнить маневр как при движении вперед, так и назад, удаленный водитель должен выбрать одно из этих направлений.
Когда указанные производителем условия выполняются (например, если удаленный водитель, нажимая кнопку пульта, дает разрешение перемещать транспортное средство), система переходит в состояние маневрирования при выезде.
4.2.2.3 Выход из состояния "Парковочный маневр"
Когда получено разрешение от удаленного водителя на запуск управления системой, система должна управлять двигателем, тормозом, трансмиссией и рулевым управлением для перемещения транспортного средства в нужном направлении.
Скорость транспортного средства должна составлять 1 м/с или менее.
Когда система находится в этом состоянии, удаленный водитель должен постоянно указывать системе намерение продолжить управление системой. В качестве примера, система должна обладать функциональностью постоянного управления системой, когда удаленный водитель постоянно нажимает на командный переключатель, и система должна приостанавливать управление (выходить из маневра), когда удаленный водитель отпускает переключатель.
Пока система контролирует движение транспортного средства, следует избегать столкновений с объектами в окружающей зоне. Когда система обнаруживает какие-либо препятствия, она должна сообщить водителю о возможности столкновения. Если препятствие устранено, система ЧАСП может продолжить маневр, как только удаленный водитель даст разрешение.
Когда транспортное средство достигает конечного целевого положения, система должна остановить транспортное средство, оставить автомобиль ЧАСП в неподвижном состоянии и одновременно проинформировать удаленного водителя о завершении контроля.
В качестве альтернативы этому сценарию система всегда может вернуться в исходное положение транспортного средства, если удаленный водитель даст эту команду через удаленное устройство.
Когда управление завершено, с подтверждением завершения от удаленного водителя, система должна перейти в состояние "Выключено".
4.3 Информационная стратегия
4.3.1 Общие положения
Система должна информировать водителя о рабочем состоянии, определенном изготовителем.
Система должна предоставить водителю инструкции, необходимые для маневрирования при парковке/выезде, определенного изготовителем.
Система должна предоставлять информацию водителю при отключении автоматического управления, когда успешно завершен автоматический маневр на парковку/выезд либо когда маневр отменен.
Метод, используемый для предоставления информации/предупреждения, может быть слуховым, визуальным, тактильным или их комбинацией.
4.3.2 Информация, предоставляемая системой в состоянии "Поиск"
Изготовитель транспортного средства несет ответственность за определение того, какая информация предоставляется системой ЧАСП водителю в состоянии поиска парковочного места/слота/гаража.
4.3.3 Информация, предоставляемая водителю системой в состояниях "Найдено", "Выбор" и "Ожидание авторизации"
Водитель должен быть проинформирован о подходящих местах/слотах/гаражах, найденных системой ЧАСП.
Ответственность за определение того, какая информация предоставляется водителю при обнаружении подходящего места/слота/гаража перед выполнением маневра автоматической парковки, возлагается на изготовителя транспортного средства.
4.3.4 Информирование водителя при переходе в состояние "Ожидание авторизации"
Изготовитель транспортного средства несет ответственность за определение действий, которые должен выполнить водитель для включения автоматического управления ЧАСП.
Водитель обязан убедиться, что предполагаемое парковочное место/слот/гараж подходит для автомобиля с ЧАСП.
4.3.5 Информирование водителя во время маневрирования при парковке/выезде
Водитель должен быть проинформирован, когда все предпосылки для начала маневрирования при парковке/выезде выполнены и ЧАСП может переключаться на автоматическое выполнение маневра при парковке/выезде.
Когда транспортное средство находится в состоянии автоматической парковки/выезда, водителю необходимо предоставить следующую информацию или предупреждение:
- система должна предоставлять информацию водителю при отключении автоматического управления;
- если ЧАСП обнаруживает неисправность, водитель должен быть проинформирован.
Водитель должен быть проинформирован, когда система ЧАСП завершила маневр парковки/выезда и прекратила управление транспортным средством.
5 Требования к испытанию работоспособности
5.1 Общие положения
В этом разделе указываются минимальные требования к испытанию работоспособности (условия окружающей среды, критерии прохождения/отказа и т.д.).
5.2 Условия окружающей среды
- Скорость ветра не должна превышать 5,4 м/с (сила ветра 3) во время испытаний.
- Температура должна быть от 5 до 30°C.
- Не должно быть осадков (дождь, мокрый снег, снег и т.д.).
- Испытания должны проводиться на ровной, сухой, однородной (асфальтовой или бетонной) поверхности с твердым покрытием.
- Стены, вспомогательное испытательное оборудование и другие, не используемые при испытаниях, объекты (помехи) должны быть удалены из испытательной зоны, чтобы устранить помехи, вызванные их отражениями (звуковыми и/или электромагнитными).
- Минимальная освещенность должна быть 100 лк.
Испытание работоспособности может проводиться в условиях окружающей среды, отличных от указанных выше условий. Однако в случае сбоя системы испытание должно быть повторено при указанных выше условиях для подтверждения соответствия.
5.3 Объект испытания
5.3.1 Ограничивающее транспортное средство
5.3.2 Эталонный бордюр
Форма контрольного бордюра, который должен использоваться для испытаний, показана на рисунке 9.
 |
1 - наружная сторона бордюра; 2 - дорога
Рисунок 9 - Определение эталонного бордюра
5.3.3 Линии слотов
5.4 Критерии испытаний
Как указано в 4.1, ЧАСП поддерживает один или несколько из следующих типов парковки:
параллельное парковочное место;
параллельный парковочный слот;
перпендикулярное парковочное место;
перпендикулярный парковочный слот;
парковочное место в гараже.
Испытания работоспособности, указанные в 5.5, должны проводиться в соответствии с поддерживаемыми типами парковки, в соответствии с условиями окружающей среды, указанными в 5.2, и с использованием объекта испытаний, указанного в 5.3.
Для испытания парковки типа 1 или типа 2 парковка должна выполняться с использованием системы ЧАСП. Когда парковка завершена правильно, удовлетворяя всем критериям прохождения, испытание считается успешно пройденным.
В случае испытания маневра на выезд для системы типа 2, испытание должно проводиться сразу после завершения испытания на маневр при парковке из положения, в котором было припарковано транспортное средство.
Автоматизированный парковочный маневр, выполняемый системой, должен быть завершен в течение 180 с после того, как система начала маневр.
Автоматический маневр выезда должен быть завершен в течение 180 с после того, как система начала маневр.
Испытания маневров при парковке/выезде должны проводиться 10 раз, каждый с одинаковыми условиями, и 9 из 10 должны быть успешными.
Для системы ЧАСП, которая обнаруживает парковочное место или слот, условия транспортного средства во время обнаружения (движение или остановка, местоположение, скорость движения и т.д.) должны соответствовать требованиям, указанным изготовителем.
5.5 Испытание работоспособности
5.5.1 Параллельное парковочное место
В этом разделе описаны процедуры испытания работоспособности и критерии прохождения испытания для системы ЧАСП, которая выполняет парковку на параллельное парковочное место, указанное в 4.1.1.
5.5.1.1 Процедура испытания парковочного маневра
Местоположение испытательного объекта должно быть таким, как показано на рисунке 1 в 4.1.1.
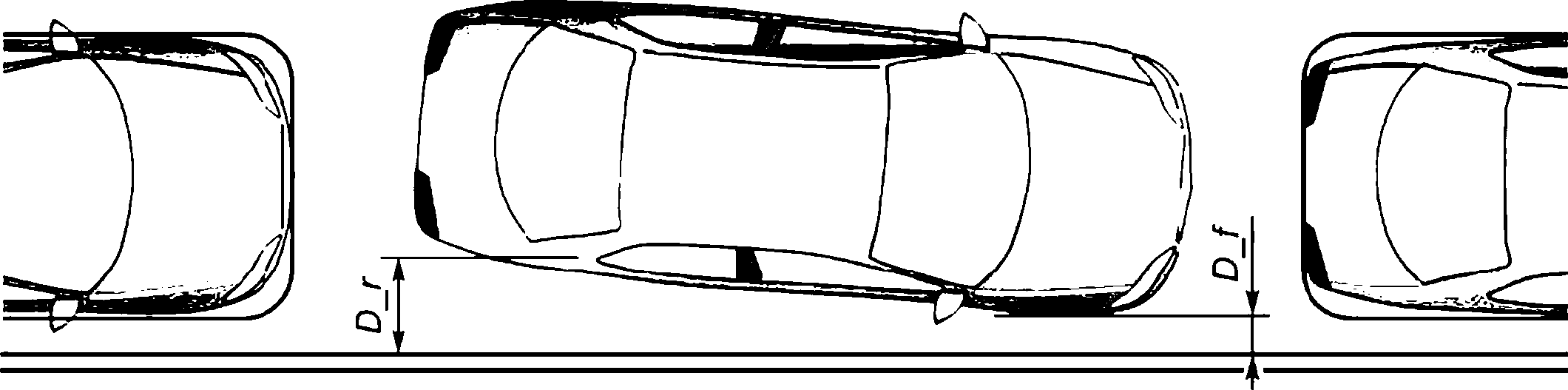
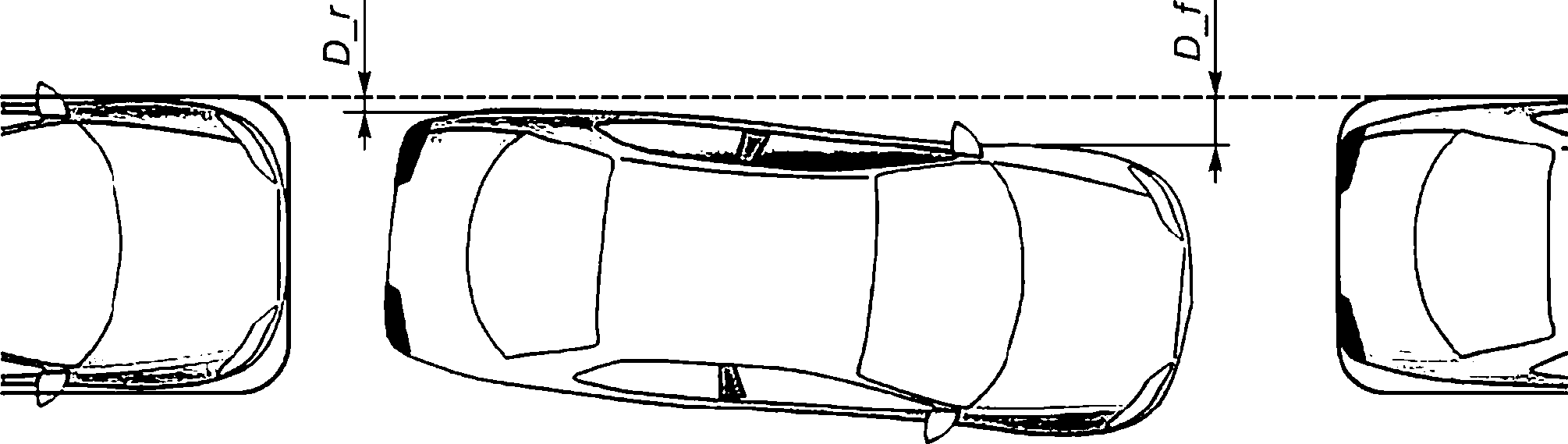
Целевое расстояние D_r, D_f (расстояние сзади, спереди) до обочины или соединительной линии может быть внутренним параметром системы ЧАСП в зависимости от выбора изготовителя транспортного средства. Точные значения не определены в этом документе, но указаны допустимые диапазоны.
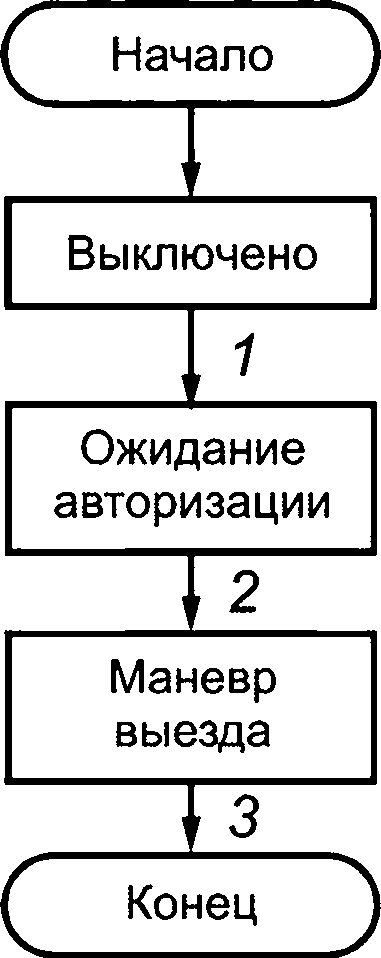 |
Рисунок 10 - Определение D_r и D_f: расстояние от задней части автомобиля до передней границы
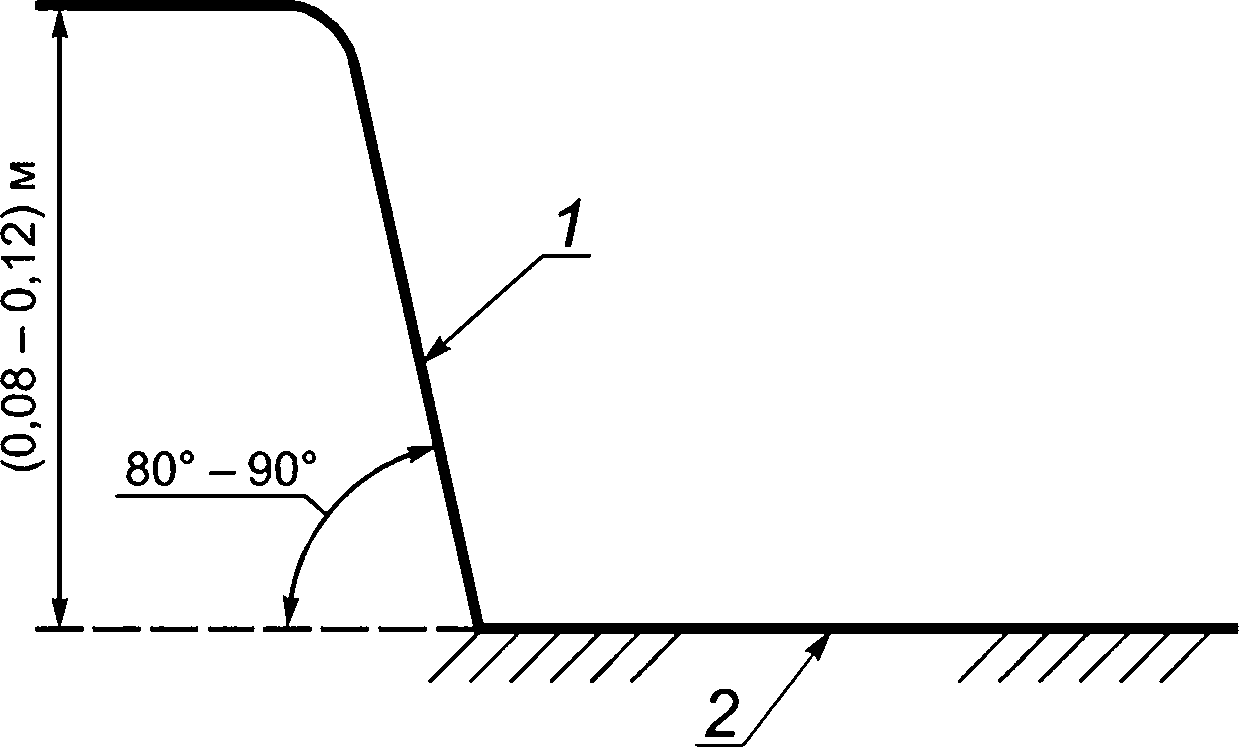 |
Рисунок 11 - Определение D_r и D_f: расстояние между транспортным средством сзади/спереди и соединительной линией автомобиля
 |
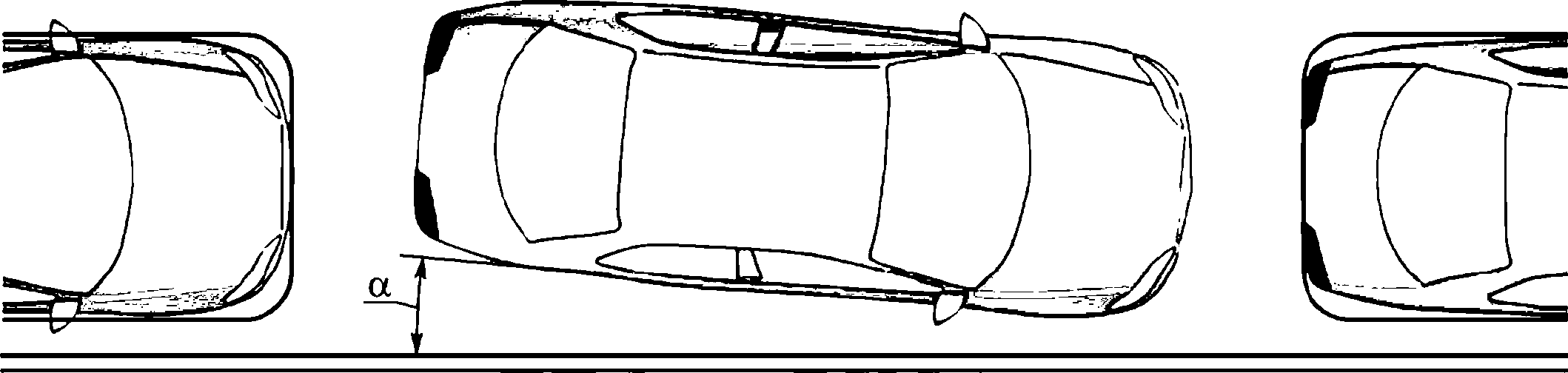
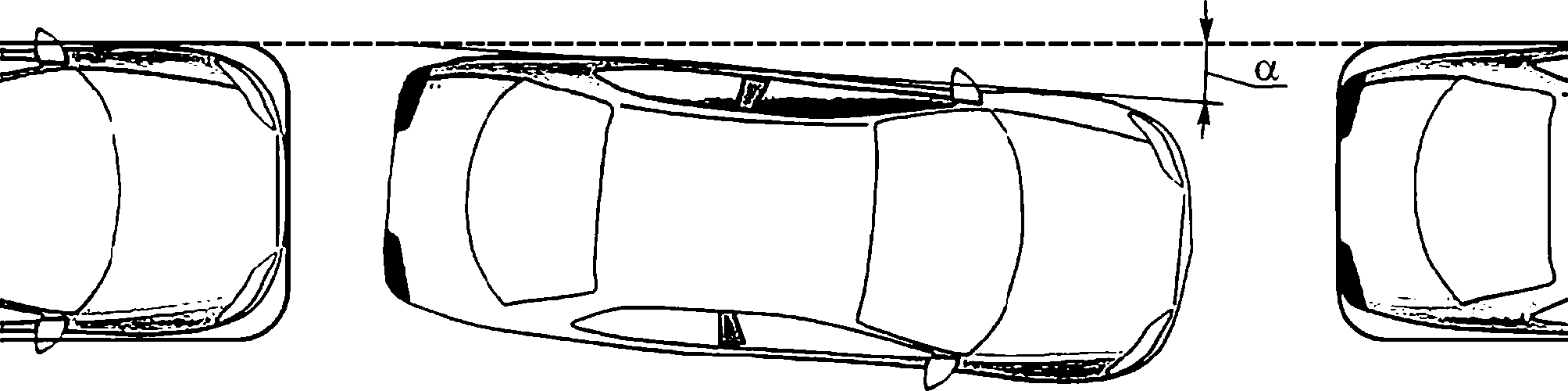
Примечание - В этом примере угол положительный.
 |
Примечание - В этом примере угол положительный.
Рисунок 13 - Определение а: ориентация транспортного средства к соединительной линии транспортного средства
5.5.1.2 Критерии прохождения для парковочного маневра
2) Требования к расстоянию от указанной линии:
среднее расстояние D_r, D_f от бордюра должно находиться в диапазоне от 0,05 м до 0,3 м (рисунок 10) или среднее расстояние D_r, D_f от соединительной линии транспортного средства должно находиться в диапазоне, определяемом производителем транспортного средства (рисунок 11);
стандартное отклонение D_r, D_f не должно превышать 0,1 м на основании успешных испытаний.
5.5.2 Параллельные парковочные места
В этом разделе описаны процедуры испытания работоспособности и критерии прохождения для системы ЧАСП, которая поддерживает параллельные парковочные места, указанные в 4.1.2.
5.5.2.1 Процедура испытания парковочного маневра
Местоположение испытательного объекта должно быть таким, как показано на рисунке 2.
В конечном положении контур автомобиля ЧАСП, который проецируется на землю без учета зеркала бокового обзора, должен быть измерен.
Определение границы параллельного парковочного места показано на рисунке 14.
5.5.3 Параллельные парковочные слоты
В этом разделе описаны процедуры испытаний работоспособности и критерии прохождения испытаний для системы ЧАСП, которая выполняет парковочный маневр на параллельные парковочные слоты, указанные в 4.1.2.
5.5.3.1 Процедура испытания для парковочного маневра
Местоположение объекта испытатний должно быть таким, как показано на рисунке 2.
В конечном положении должен быть измерен контур транспортного средства ЧАСП, спроецированного на землю без учета боковых зеркал.
Определение границы параллельного парковочного места показано на рисунке 14.
 |
1 - целевая парковка; 2 - осевая линия испытываемого автомобиля с ЧАСП
Рисунок 14 - Определение границы параллельного парковочного места
5.5.3.2 Критерии прохождения испытания парковочного маневра
Транспортное средство ЧАСП должно быть расположено в пределах целевой зоны (рисунок 14).
5.5.4 Перпендикулярное парковочное место
В этом пункте описаны процедуры испытания работоспособности и критерии прохождения испытания для системы ЧАСП, которая выполняет парковочный маневр на перпендикулярные парковочные места, указанные в 5.1.3.
5.5.4.1 Процедура испытания парковочного маневра
Местоположение объекта испытаний должно быть таким, как показано на рисунке 3.
Два граничащие транспортные средства, используемые в испытаниях, должны быть физически аналогичны транспортному средству с ЧАСП.
В конечном положении должен быть измерен контур транспортного средства ЧАСП, спроецированного на землю без учета боковых зеркал.
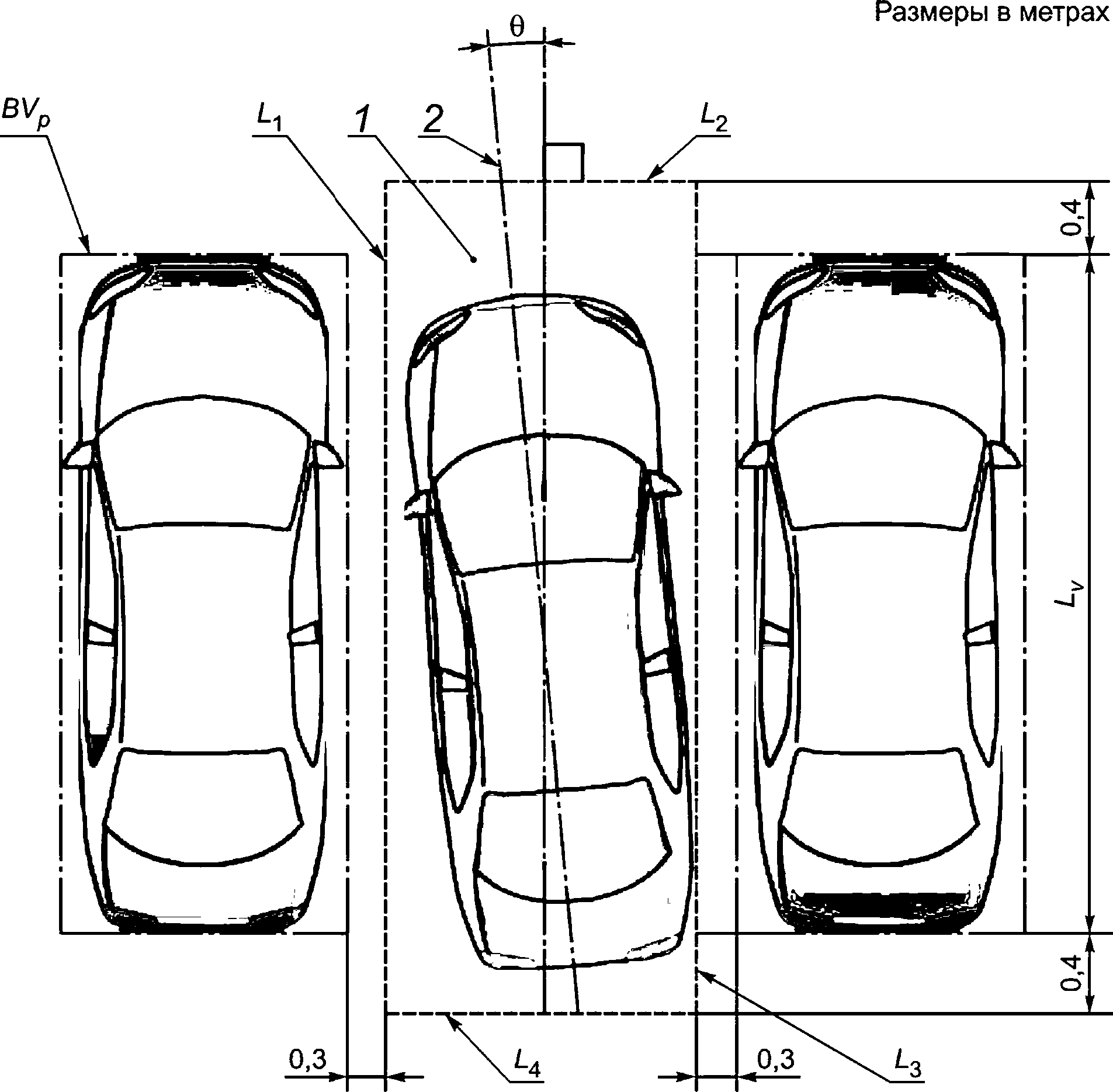
Определение целевой области и углового выравнивания в перпендикулярном парковочном месте показано на рисунке 15.
 |
1 - целевая парковка; 2 - осевая линия автомобиля ЧАСП;
Рисунок 15 - Определение целевой области и угла наклона на перпендикулярном парковочном месте
5.5.4.2 Критерии прохождения испытания парковочного маневра
Транспортное средство ЧАСП должно быть расположено в пределах целевой зоны (рисунок 15).
5.5.4.3 Процедура испытания для маневра выезда типа 2
Испытание должно проводиться сразу после завершения испытания парковочного маневра (5.5.4.1). Продолжать испытания необходимо до тех пор, пока не будут выполнены критерии, указанные ниже (5.5.4.4).
5.5.4.4 Критерии прохождения испытания для маневра выезда типа 2
Транспортное средство должно быть выдвинуто в положение, в котором водитель может попасть в транспортное средство.
5.5.5 Перпендикулярный парковочный слот
В этом разделе описаны процедуры испытания работоспособности и критерии прохождения испытания для системы ЧАСП, которая выполняет парковочный маневр в перпендикулярный парковочный слот, указанный в 4.1.4.
5.5.5.1 Процедура испытания парковочного маневра
Местоположение объекта испытаний должно быть таким, как показано на рисунке 4.
 |
1 - целевая парковка; 2 - осевая линия автомобиля ЧАСП; 3 - центры линий слота;
m0=0,1 м; me=0,1-0,2 м; mf=0-0,1 м; me+mf=0,2 м
Рисунок 16 - Определение целевой области и углового выравнивания на перпендикулярном парковочном месте
5.5.5.2 Критерии прохождения испытания парковочного маневра
Транспортное средство ЧАСП должно быть расположено в пределах целевой зоны (рисунок 16).
5.5.5.3 Процедура испытания маневра типа 2
Испытание должно проводиться сразу после завершения испытания парковочного маневра (5.5.5.1). Продолжать испытания следует до тех пор, пока не будут выполнены критерии, указанные ниже (5.5.5.4).
5.5.5.4 Критерии прохождения испытания маневра выезда типа 2
Транспортное средство должно быть выдвинуто в положение, в котором водитель может попасть в транспортное средство.
5.5.6 Парковочное пространство в гараже
В этом пункте описаны процедуры испытания работоспособности и критерии прохождения испытания для системы ЧАСП, которая выполняет парковочный маневр на парковочное место в гараже, указанное в 4.1.5.
5.5.6.1 Процедура испытания парковочного маневра
Местоположение объекта испытаний должно быть таким, как показано на рисунке 6.
Необходимо переместить автомобиль с ЧАСП в исходное положение от целевого входа в гараж. Исходное положение должно быть определено производителем.
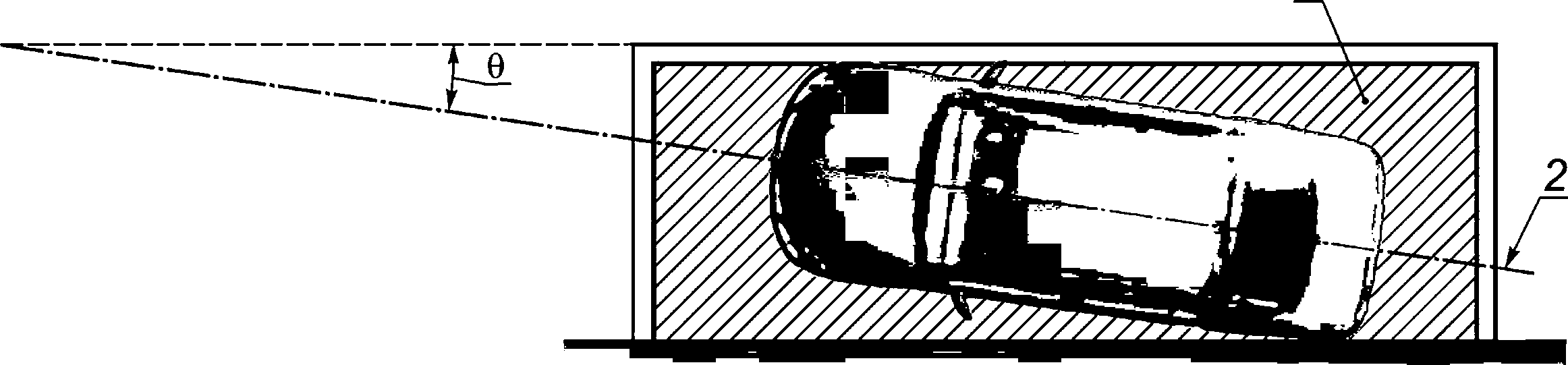
Определение целевой зоны парковки и углового выравнивания показано на рисунке 17.
 |
1 - целевая парковка; 2 - центральная линия гаража; 3 - осевая линия автомобиля ЧАСП
Рисунок 17 - Определение целевой области и углового выравнивания для парковки в гараже
5.5.6.2 Критерии прохождения для парковочного маневра
Автомобиль с ЧАСП не должен задевать, царапать конструкцию гаража во время парковочного маневра.
Транспортное средство с ЧАСП должно быть расположено в пределах целевой зоны (рисунок 17).
5.5.6.3 Процедура испытания для маневра типа 2
Испытание должно быть проведено сразу после завершения испытания парковочного маневра (5.5.6.1). Необходимо продолжать испытания до тех пор, пока не будут выполнены критерии, указанные ниже (5.5.6.4).
5.5.6.4 Критерии прохождения испытания для маневра выезда типа 2
Конечная позиция маневра выезда типа 2 должна обеспечить водителю возможность свободно сесть в транспортное средство.
Библиография
[1] | Технический регламент Таможенного союза ТР ТС 018/2011 | О безопасности колесных транспортных средств |
УДК 656.131.7:006.354 | ОКС 03.220.20 | ||
Ключевые слова: интеллектуальная транспортная система, частично автоматизированные парковочные системы, параллельная парковка, перпендикулярная парковка, парковочный маневр | |||
{kind=link}