ПНСТ 633-2022
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
КООПЕРАТИВНЫЕ АДАПТИВНЫЕ СИСТЕМЫ КРУИЗ-КОНТРОЛЯ
Требования к эксплуатационным характеристикам и методы испытания
Intelligent transport systems. Cooperative adaptive cruise control systems. Performance requirements and test procedures
ОКС 03.220.20
Срок действия с 2022-08-01
до 2025-08-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "ТранснавиСофт" (ООО "ТранснавиСофт") совместно с федеральным государственным бюджетным образовательным учреждением высшего образования "Московский автомобильно-дорожный государственный технический университет (МАДИ)"
(Поправка. ИУС N 7-2022).
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 1 февраля 2022 г. N 7-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 20035-2019* "Интеллектуальные транспортные системы. Кооперативные адаптивные системы круиз-контроля. Требования к эксплуатационным характеристикам и методы испытания" (ISO "Intelligent transport systems - Cooperative adaptive cruise control systems - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 127083 Москва, ул.Мишина, д.35 и в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
ВНЕСЕНА поправка, опубликованная в ИУС N 7, 2022 год, введенная в действие с 29.05.2022
Введение
Система кооперативного адаптивного круиз-контроля (КАКК) является усовершенствованием системы адаптивного круиз-контроля (АКК), позволяющей обмениваться информацией по беспроводной связи с окружающими транспортными средствами и/или инфраструктурой для расширения возможностей активного зондирования окружающей среды (см. рисунок 1).
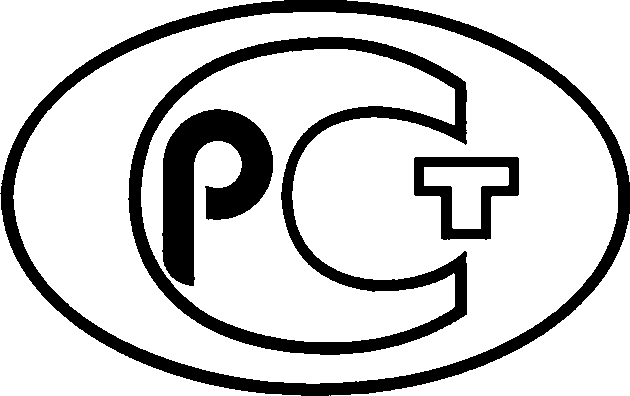 |
Рисунок 1 - Функциональные элементы системы кооперативного адаптивного круиз-контроля
Система использует такие данные, как дальность до транспортных средств, движущихся впереди, данные о самом транспортном средстве, данные, получаемые по радио от других окружающих транспортных средств и от инфраструктуры. По результатам обработки получаемых данных система формирует информацию, необходимую для продольного управления транспортным средством с помощью органов управления дроссельной заслонкой и тормозом. Система также формирует информацию о состоянии КАКК для передачи водителю.
Системы адаптивного круиз-контроля можно сделать кооперативными системами адаптивного круиз-контроля, добавив им возможности связи между транспортными средствами (V2V) и/или между инфраструктурой и транспортным средством (I2V), а также возможности регулирования функций системы. Регулирование функций системы осуществляется на основе использования информации, полученной с помощью системы связи, например с помощью выделенной связи ближнего действия (DSRC) или другого принятого вида связи ближнего действия (см. рисунок 2).
Связь V2V может обеспечивать систему АКК частыми обновлениями скорости, ускорения и управления (дроссельной заслонки и тормозами) нескольких транспортных средств, движущихся вблизи автомобиля, оборудованного системой КАКК. Это обеспечивает следующие улучшения производительности по сравнению с АКК:
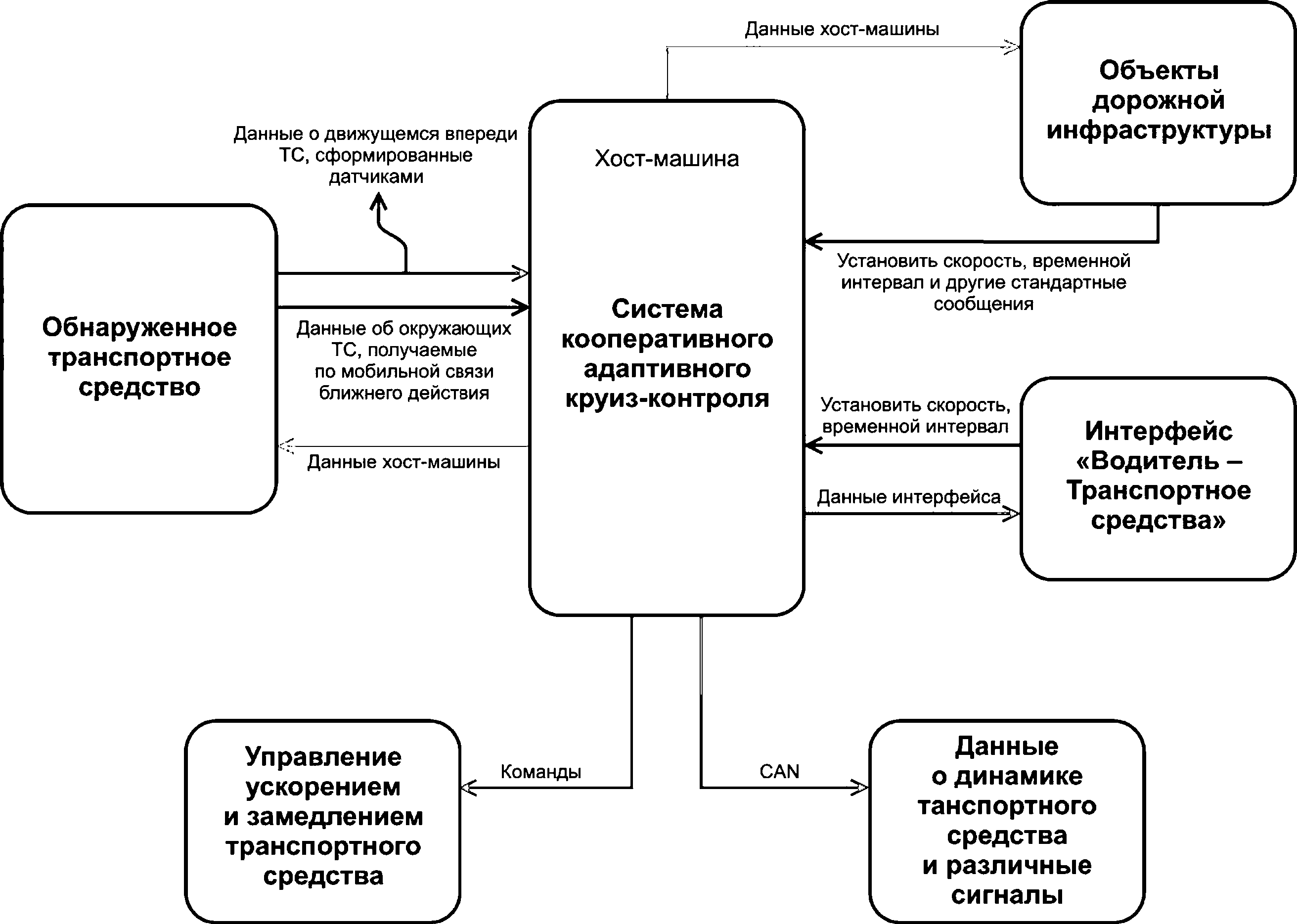 |
Рисунок 2 - Функциональные дополнения КАКК к АКК
- высокоточное и плавное регулирование интервала следования за двигающимся впереди транспортным средством;
- значительно более быстрое реагирование на изменение скорости несколькими двигающимися впереди транспортными средствами, а не только транспортным средством, непосредственно опережающим рассматриваемое транспортное средство;
- установка более короткого интервала следования за двигающимся впереди транспортным средством без ущерба для безопасности, уверенности и комфорта водителя.
Улучшения производительности дают следующие преимущества:
- повышенная уверенность водителя в реакции системы приводит к желанию выбирать более короткие интервалы между движущимися транспортными средствами и использовать АКК в более широком диапазоне условий движения;
- меньшее количество случаев встраивания других транспортных средств при более коротких интервалах движения может сделать АКК приемлемым для более широкого круга водителей;
- значительно снижается количество нарушений движения транспортного потока, улучшается динамика транспортного потока и, следовательно, сокращается использование энергии и выбросов;
- значительно увеличивается эффективная пропускная способность на полосе движения скоростной дороги.
Связь I2V может предоставить системе АКК входные данные от локальной системы управления движением, которая определяет рекомендуемые значения для заданной скорости и временного интервала до следующего впереди транспортного средства. Эти данные могут быть использованы для повышения эффективности стратегий управления движением на автомагистралях с ограниченным доступом, где можно определить параметры скорости и интервала движения транспортных средств, которые могут максимизировать эффективную пропускную способность участка магистрали, являющегося узким местом. Когда транспортные средства, оборудованные КАКК, следуют этим рекомендациям, полученным по связи I2V, общая пропускная способность транспортного потока может быть оптимизирована с минимальным активным вмешательством водителей транспортных средств (кроме действий, связанных с принятием решения следовать указаниям, полученным от инфраструктуры). Это означает, что рассматриваемое транспортное средство двигается более плавно, с меньшим ускорением и торможением и более низким энергопотреблением. На скоростной дороге в целом достигается более высокая эффективная пропускная способность, уменьшается энергопотребление, снижается количество загрязнений, а также уменьшаются задержки движения.
1 Область применения
Система кооперативного адаптивного круиз-контроля (КАКК) является результатом расширения существующей стратегии управления адаптивным круиз-контролем (АКК). Основным отличием данной системы является то, что она использует беспроводную связь с двигающимися впереди транспортными средствами (V2V) и/или инфраструктурой (I2V).
Данные V2V для нескольких транспортных средств и данные инфраструктуры I2V являются предметом рассмотрения данного документа. Когда используются данные V2V, КАКК может обеспечить более короткие интервалы времени между транспортными средствами и более точный контроль этих интервалов, что позволяет увеличить пропускную способность скоростной дороги и снизить расход топлива. КАКК также может получать данные от объектов инфраструктуры, такие как рекомендуемая скорость и рекомендуемый интервал движения, для улучшения параметров транспортного потока и повышения безопасности.
В этом документе рассматриваются два типа систем КАКК: V2V и I2V. Оба требуют активного зондирования окружающей среды транспортным средством с использованием, например, радарных, лидарных или видеосистем. Комбинированные V2V и I2V КАКК в этом документе не представлены.
В этом документе рассматриваются следующие темы:
- классификация типов систем КАКК;
- определение требований к производительности для каждого типа систем КАКК;
- схема переходов состояний системы КАКК;
- минимальный набор требований к беспроводным данным;
- процедуры испытаний.
Система КАКК:
- осуществляет только продольный контроль скорости автомобиля;
- использует стратегию контроля интервала движения, аналогичную стратегии системы АКК (САКК);
- имеет те же критерии участия в управлении, что и АКК.
Согласованные стратегии управления группами транспортных средств, такие как платунинг (platooning), в которых контроллеры транспортных средств основывают свои действия по контролю на том, как они влияют на другие транспортные средства, и которые могут удерживать очень короткий интервал между транспортными средствами, не входят в сферу применения этого документа.
Система КАКК работает под контролем водителя. Ответственность за безопасность движения остается за водителем.
Этот документ применим к автотранспортным средствам, включая легкие и тяжелые транспортные средства.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ГОСТ Р 58824 Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля. Требования к эксплуатационным характеристикам и методы испытания
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 управление активным торможением: Функция применения тормозов без участия водителя, в рассматриваемом случае под управлением системы КАКК.
3.2 адаптивный круиз-контроль: Усовершенствованная система обычного круиз-контроля, позволяющая рассматриваемому ТС, оборудованному КАКК, следовать за целевым ТС на безопасном расстоянии, управляя двигателем, трансмиссией и тормозами.
3.3 тормоз: Устройство, в котором возникающие силы препятствуют продолжению движения транспортного средства.
Примечание - Тормоз может быть следующего типа: фрикционный тормоз (когда силы возникают в результате трения движущихся относительно друг друга двух частей транспортного средства); электрический тормоз (когда силы возникают в результате электромагнитного действия между двумя частями транспортного средства, движущихся относительно друг друга, но не в контакте друг с другом); гидравлический тормоз (когда силы возникают в результате действия жидкости, находящейся между двумя частями транспортного средства, движущегося относительно друг друга); двигатель, выполняющий роль тормоза (когда эти силы возникают в результате искусственного увеличения тормозящего действия двигателя, передающегося на колеса).
3.4 состояния системы кооперативного адаптивного круиз-контроля: Режимы работы системы, представленные тремя состояниями.
Примечание - Согласно 6.1.4 и рисунку 4.
3.5 расстояние между транспортными средствами: Расстояние от задней поверхности впереди идущего транспортного средства до передней поверхности рассматриваемого транспортного средства.
3.6 подключенный автомобиль: Любое транспортное средство, которое имеет систему беспроводной связи V2X и передает сообщения по стандартному протоколу.
3.7 система круиз-контроля: Система, способная поддерживать скорость транспортного средства, которую установил водитель.
3.8 впереди идущее транспортное средство: Транспортное средство, движущееся впереди рассматриваемого транспортного средства, двигающееся в том же направлении, находящееся в поле обзора САКК рассматриваемого транспортного средства.
3.9 рассматриваемое транспортное средство; РТС: ТС категорий M и N, обладающее уровнем автоматизации 0-2 и оборудованное САКК.
3.10 свободный транспортный поток: Плавно движущийся транспортный поток, в котором исключены режимы движения stop and go и резкие торможения.
3.11 категория тяжелых транспортных средств: Одиночное транспортное средство или комбинация транспортных средств, определенных в качестве категории 1-2 или категории 2.
Примечания
1 Категории ТС определены на Всемирном форуме для согласования правил в области транспортных средств (WP.29) TRANS/WP.29/1045 Экономического и социального совета Организации Объединенных Наций.
2 Грузовой автомобиль относится к категории тяжелых транспортных средств.
3.12 потенциально интересное транспортное средство; ПИТС: Подключенное транспортное средство, которое существует в области интереса V2V КАКК, общается с рассматриваемым транспортным средством и представляет потенциальный интерес для продольного управления рассматриваемым транспортным средством.
3.13 область интереса: Область, в которой потенциально интересное транспортное средство и рассматриваемое транспортное средство могут существовать и влиять на операции управления системой КАКК.
3.14 установленная скорость: Желаемая скорость движения, устанавливаемая либо водителем, либо некоторой системой управления, внешней по отношению к системе КАКК.
Примечание - Установленная скорость является максимальной желаемой скоростью транспортного средства, двигающегося под управлением КАКК.
3.15
стационарный объект: Объект, находящийся в неподвижном состоянии впереди РТС. [ГОСТ Р 58824-2020, пункт 3.14] |
3.16 устойчивое состояние: Условие, при котором значение описываемого параметра не изменяется во времени, по расстоянию и т.д.
3.17 целевое транспортное средство; ЦТС: Механическое ТС, движущееся впереди РТС в том же направлении, по той же полосе проезжей части и находящееся в поле обзора КАКК РТС.
3.18 транспортное средство, являющееся объектом испытаний; SV: Транспортное средство, оборудованное системой КАКК и относящееся к обсуждаемой теме.
3.19 транспортное средство-мишень; TV: Транспортное средство, за которым следует испытываемое транспортное средство.
3.21 МАС-адрес: Уникальный идентификатор, присваиваемый каждой единице активного оборудования в компьютерных сетях.
4 Обозначения и сокращения
В настоящем стандарте приняты следующие обозначения и сокращения:
ПИТС - любое подключенное транспортное средство, которое находится в области интересов системы КАКК;
CAN - стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков транспортного средства (Controller Area Network);
DVI - интерфейс "водитель - транспортное средство" (Driver-Vehicle Interface);
CTT - коэффициент тестируемой мишени для инфракрасных отражателей;
c - дистанция между транспортными средствами;
I2V - связь между объектами инфраструктуры и транспортными средствами (lnfrastructure-to-Vehicle);
OEM - производитель оригинального оборудования (Original equipment manufacturer);
ROI - область интересов (Region of Interest);
V2V - связь между транспортными средствами (Vehicle-to-Vehicle);
V2X - связь между транспортным средством и любым объектом, который может повлиять на транспортное средство (Vehicle-to-Everything);
ГНСС - глобальная навигационная спутниковая система.
5 Классификация
5.1 Типы систем КАКК
Типы КАКК разделяются по типу данных, передаваемых по мобильной связи, которые могут влиять на продольное управление транспортным средством. В этом документе рассматриваются два типа систем КАКК: V2V и I2V (см. таблицу 1).
Таблица 1 - Типы систем КАКК и их характеристики
Тип систем КАКК | Требуется активное зондирование окружающей среды | Требование к беспроводной связи (например: DSRC - низкая задержка, 4G - большая задержка) | Тип данных, влияющих на продольный контроль |
V2V | Да | Низкая задержка является минимальным требованием | V2V по мобильной связи |
I2V | Да | Некоторые данные могут передаваться с более длительной задержкой в зависимости от срочности сообщения | I2V по мобильной связи |
5.2 Характеристики КАКК на непрямолинейных участках дорог
Этот документ применим к системам КАКК с различными характеристиками функционирования на непрямолинейных участках дорог, как указано в ГОСТ Р 58824.
5.3 Классы бортовых устройств V2X
Тип A: OEM-устройство, которое получает и обрабатывает данные, передаваемые по шине CAN транспортного средства.
Тип B: OEM-устройство, которое не получает или не обрабатывает данные, передаваемые по шине CAN транспортного средства.
Тип C: не OEM-устройство, которое получает и обрабатывает данные, передаваемые по шине CAN транспортного средства.
Тип D: не OEM-устройство, которое не получает или не обрабатывает данные, передаваемые по шине CAN транспортного средства.
6 Требования к системе КАКК
6.1 Информационный обмен V2V в системе КАКК
Система КАКК реагирует на данные V2V в эфире в дополнение к данным активного зондирования, полученным от датчиков, таких как радар или видеокамера.
6.1.1 Система КАКК, использующая информацию, полученную по связи V2V
Система КАКК реагирует на информацию, полученную от других транспортных средств по мобильной связи V2V в дополнение к данным активного зондирования, полученным от датчиков, таких как радар или видеокамера.
6.1.2 Область интересов (ROI)
Область интересов определена для прямой дороги в форме прямоугольника, как показано на рисунке 3.
 |
Рисунок 3 - Область интересов (ROI) системы КАКК V2V
Эта область имеет ширину 32 м и простирается от места водителя в соответствующем транспортном средстве на 250 м перед рассматриваемым транспортным средством и в 100 м позади рассматриваемого транспортного средства. Для непрямолинейного участка дороги область интересов должна изгибаться, чтобы следовать изгибу дороги.
6.1.3 Потенциально интересное транспортное средство
ПИТС - это любое подключенное транспортное средство, которое находится в области интересов системы КАКК V2V, связывается с рассматриваемым транспортным средством, представляет интерес для продольного управления и не является целевым транспортным средством-мишенью (или целевым TV), например, транспортное средство, которое, по прогнозам, должно перестроиться на полосу движения рассматриваемого транспортного средства (см. рисунок 7). Другой пример: транспортное средство, которое осуществляет резкое торможение впереди и на той же полосе, что и целевое транспортное средство (см. рисунок 8). ПИТС имеет потенциал стать целевым транспортным средством.
6.1.4 Диаграмма перехода состояний
На рисунке 4 представлены те же основные состояния АКК, которые описаны в ГОСТ Р 58824, т.е. состояния "Выключено", "Ожидание" и "Активное состояние". Активное состояние КАКК имеет два основных варианта:
- активное состояние АКК, которое совпадает с активным состоянием АКК в ГОСТ Р 58824;
- кооперативное активное состояние КАКК V2V, описанное диаграммой переходов состояний КАКК в этом документе, которое отличается от активного состояния, описанного в диаграмме переходов АКК в ГОСТ Р 58824. Это состояние достигается только в том случае, если от подключенного транспортного средства, находящегося в области интересов КАКК, определенной на рисунке 3, получены действительные данные. Это состояние КАКК V2V включает три дочерних состояния: режимы "Не следовать", "Закрыть" и "Следовать". Переход между этими состояниями зависит от существования целевого транспортного средства, его подключения, а также от наличия потенциально интересного транспортного средства в области интересов рассматриваемого транспортного средства.
 |
Рисунок 4 - Диаграмма перехода состояний системы КАКК V2V
Ниже приведено описание всех состояний системы КАКК V2V и условий их перехода.
"Выключено": работа в состоянии "Выключено" и условия перехода такие же, как для состояния "Выключено", описанного в ГОСТ Р 58824.
"Ожидание": режим работы в режиме ожидания и условия перехода такие же, как состояния "Ожидание" АКК, описанные в ГОСТ Р 58824.
"Активное состояние": условия перехода в активное состояние такие же, как условия перехода в активное состояния системы АКК, описанные в ГОСТ Р 58824. Однако активное состояние системы КАКК V2V работает в двух разных режимах. Первый режим - это состояние, которое аналогично активному состоянию, описанному в ГОСТ Р 58824. Второй режим - это активное состояние системы КАКК V2V, при котором данные, полученные по мобильной связи V2V, позволяют влиять на продольный контроль рассматриваемого транспортного средства. В этом состоянии продольный контроль транспортного средства может зависеть от данных V2V. Система КАКК переходит в этот режим из активного состояния АКК, когда имеются данные, передаваемые по мобильной связи, полученные от ПИТС или подключенного транспортного средства-мишени.
Режим Non-Follow: режим Non-Follow (отсутствие состояния следования) возникает в системе КАКК V2V, когда транспортное средство-мишень не существует. Потенциально интересное транспортное средство может повлиять на продольный контроль транспортного средства с помощью данных, передаваемых по мобильной связи.
Режим Close-Follow: режим Close-Follow (следование на близком расстоянии) возникает в системе КАКК V2V, когда транспортное средство-мишень существует и подключено. На продольный контроль транспортного средства могут влиять транспортное средство-мишень и потенциально интересное транспортное средство с помощью данных, передаваемых по мобильной связи.
Режим Follow: режим Follow (следование) возникает в системе КАКК V2V, когда транспортное средство-мишень существует, но не подключено. Продольный контроль транспортного средства может зависеть от потенциально интересного транспортного средства, передающего данные по мобильной связи. На продольный контроль транспортного средства будут влиять данные активного зондирования транспортного средства-мишени. Ниже перечислены условия перехода между дочерними состояниями активного состояния системы КАКК V2V:
Переход A: транспортное средство-мишень не существует в области интереса, но в области интереса существует потенциально интересное транспортное средство.
Переход B: транспортное средство-мишень существует, и это подключенный автомобиль. Потенциально интересное транспортное средство также может существовать.
Переход C: транспортное средство-мишень существует в области интереса, но оно не подключено, а потенциально интересное транспортное средство существует в области интереса.
Действительные данные, получаемые от подключенного транспортного средства, должны соответствовать минимальным требованиям к данным КАКК V2V подключенного транспортного средства, описанным в 6.1.6.
6.1.5 Стратегия управления операциями
6.1.5.1 Таблица 2 объясняет требования к управлению в системе V2V КАКК.
Таблица 2 - Требования к управлению в системе V2V КАКК
Транс- портное средство- мишень сущес- твует | Тран- спортное средство- мишень подклю- чено | Потен- циально инте- ресное тран- спортное средство сущест- вует | КАКК режим | Мини- мальная временная дистанция | Макси- мальное замед- ление | Макси- мальное ускорение | На контроль КАКК влияют данные в эфире |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
Нет | Нет | Нет | АКК Active: Cruise | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Нет |
Да | Нет | Нет | АКК Active: Follow | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Нет |
Нет | Нет | Да | V2V Cooper active: Non-Follow | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Да |
Да | Да | Нет | V2V Cooper active: Close-Follow | 0,5 с | 5 м/с | 2,75 м/с | Да |
Да | Да | Да | V2V Cooper active: Close_ Follow | 0,5 с | 5 м/с | 2,75 м/с | Да |
Да | Нет | Да | V2V Cooper active: Follow | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Согласно ГОСТ Р 58824 | Да |
6.1.5.2 Нижний предел промежутка времени составляет 0,5 с.
6.1.5.3 В режиме Close-Follow расстояние между транспортными средствами увеличивают на величину минимального добавленного смещения, которое добавляют к расстоянию (s), рассчитываемому на основе интервала времени движения, заданного для режима Close-Follow, по формуле:
6.1.5.4 Подключенное транспортное средство-мишень должно быть идентифицировано с очень высокой степенью достоверности, т.е. для того, чтобы подключенное транспортное средство-мишень вызывало переход в режим Close-Follow, данные о подключенном транспортном средстве, полученные испытуемым транспортным средством, должны быть адекватно соотнесены с данными активного датчика испытуемого транспортного средства (например, радара). Адекватность соотнесения должна соответствовать следующим критериям:
- определено, что полоса движения подключенного транспортного средства соответствует полосе движения транспортного средства, являющегося объектом испытаний;
- рассчитанная скорость подключенного транспортного средства мишени находится в пределах 1 м/с от скорости испытуемого транспортного средства, определенной по данным датчиков.
6.1.5.5 Переход в режим Close-Follow не допускается, если подключенное транспортное средство-мишень оснащено устройствами типа B или D. Переход в режим Close-Follow разрешен, если подключенное транспортное средство-мишень оснащено устройствами типа A или C.
Устройства типов A, B, C и D описаны в 5.3.
6.1.5.6 Система может отказаться от перехода в режим Close-Follow, если подключенное транспортное средство-мишень оснащено устройством типа C.
6.1.5.7 Водитель должен быть в состоянии в любое время деактивировать режим Close-Follow.
6.1.5.8 Система всегда информирует водителя о текущем режиме системы КАКК. Человекомашинный интерфейс (HMI) и функциональная реализация оставлены на усмотрение производителя.
6.1.5.9 Система КАКК, установленная на транспортное средство из категории тяжелых транспортных средств, может переходить в режим Close-Follow только в том случае, если подключенное транспортное средство-мишень относится к аналогичной категории тяжелых транспортных средств.
6.1.5.10 Водитель должен быть проинформирован в соответствии с ГОСТР 58824, когда система КАКК достигает максимальной способности к замедлению.
6.1.5.12 Если связь с транспортным средством-мишенью прервана (его подключенные данные не были получены принимающим транспортным средством) или данные подключенного транспортного средства-мишени не являются актуальными данными, когда испытуемое транспортное средство находится в режиме Close-Follow и не выполняет торможение происходит следующее: система КАКК переходит в обычный активный режим АКК и активному АКК следует избегать жесткого торможения, чтобы увеличить разрыв до исходной активной настройки АКК, если относительная скорость между объектом и основным автомобилем (скорость ТС цели - скорость испытуемого ТС) близка к нулю или превышает его. Это попытка уменьшить вероятность возникновения состояния нестабильности группы в сценарии, когда много автомобилей КАКК следуют друг за другом и связь внезапно прерывается (например, сеть перегружена).
6.1.5.13 От изготовителя зависит решение запретить переход в режим Close-Follow при обнаружении условий скользкой дороги. От КАКК не требуется обнаружение условий дорожной среды, чтобы работать в любом из своих рабочих состояний.
6.1.5.14 Если это не запрещено из-за каких-либо требований в пп.6.1.5.1-6.1.5.13, то производитель принимает решение о управляющем действии при любом переходе между состояниями системы КАКК, указанными в 6.1.4.
6.1.6 Требования к данным КАКК V2V
6.1.6.1 Набор данных, который может потребоваться для КАКК V2V:
1) временный ID автомобиля/МАС-адрес;
2) тип устройства на борту устройства;
3) данные об автомобиле: тип, размеры, пределы эффективности тормозной системы и общая масса автомобиля;
4) 3D-позиции (широта, долгота и высота);
5) азимутальный угол курса;
6) скорость автомобиля;
7) продольное ускорение автомобиля;
8) скорость рыскания автомобиля;
9) состояние тормоза: включение/выключение тормоза; положение педали тормоза;
10) положение педали ускорения;
11) угол поворота;
12) флаг события.
Пример - Событие резкого торможения, ABS, потеря тяги, контроль устойчивости включен, индикатор опасности, материал опасности, спущенная шина;
13) точность данных ГНСС.
6.1.6.2 Дополнительные возможные данные V2V, когда транспортное средство оборудовано системой КАКК:
1) режим КАКК;
2) данные транспортного средства-мишени (это данные транспортного средства-мишени, за которым следует транспортное средство с системой КАКК): расстояние от испытуемого транспортного средства до транспортного средства цели, азимутальный угол транспортного средства мишени относительно курса транспортного средства, скорость транспортного средства-мишени, установка временного интервала и расчетное продольное ускорение целевого транспортного средства;
3) КАКК запросила ускорение/замедление или эквивалентные команды.
6.1.6.3 Данные V2V должны иметь минимальную частоту обновления в соответствии с таблицей 3.
Таблица 3 - Минимальная частота обновления данных V2V
Наименование показателя | Частота обновления |
Временный идентификатор автомобиля/МАС-адрес | 1 Гц и при каждом изменении МАС-адреса устройства |
Тип устройства на борту устройства (рыночное название типа) | 1 Гц и при каждом изменении МАС-адреса устройства |
Данные об автомобиле: тип, габариты, ограничения производительности, система торможения и общая масса автомобиля | 1 Гц и при каждом изменении МАС-адреса устройства |
Габариты (широта, долгота и высота) | 10 Гц |
Азимутальный угол курса | 10 Гц |
Скорость автомобиля | 10 Гц |
Продольное ускорение автомобиля | 10 Гц |
Скорость рыскания автомобиля | 10 Гц |
Состояние тормоза | 10 Гц |
Положение дроссельной заслонки | 10 Гц |
Угол поворота | 10 Гц |
Флаг события | 10 Гц |
Точность данных ГНСС | 10 Гц |
Данные КАКК, указанные в 6.1.6.2 | 10 Гц |
6.1.6.4 Полученные по радиоинтерфейсу данные не должны задерживаться более чем на половину интервала времени обновления передачи.
6.1.6.5 Пакеты данных V2V имеют требуемые полномочия по обеспечению безопасности.
6.1.6.6 Предсказание пути и данные истории пути также будут полезны для лучшего отслеживания траектории транспортного средства-мишени и помогут более плавно управлять транспортным средством, но их не требуется отправлять по мобильной связи.
6.1.6.7 Данные о местоположении должны иметь линейную точность определения положения на уровне 1,5 м или менее (значение 1 сигма).
6.2 Информационный обмен в системе КАКК I2V
6.2.1 Стратегия управления операциями
Система I2V КАКК реагирует на данные I2V, полученные по радиосвязи, в дополнение к данным активного зондирования
6.2.1.1 В таблице 4 указаны требования к управлению в системе КАКК I2V для некоторых данных I2V.
Таблица 4 - Требования к управлению в системе КАКК I2V
Данные I2V | Альтер- нативная заданная скорость | Альтер- нативный промежуток времени | Информи- рование водителя | Подтверждение водителя | Минимальное управляющее действие КАКК |
1 | 2 | 3 | 4 | 5 | 6 |
Рекомендуемая скорость от оборудования инфраструктуры | Да | Нет | Необходимо проинформировать водителя | Требуется подтверждение водителя для принятия рекомендуемой скорости, если рекомендуемая скорость превышает текущую установленную скорость). Иначе подтверждение водителя не требуется | Текущую заданную скорость заменяют рекомендуемой скоростью, которую водитель принимает |
Рекомендуемый временной интервал от оборудования инфраструктуры | Нет | Да | Необходимо проинформировать водителя | Требуется подтверждение водителя, если рекомендуемый промежуток времени меньше текущего установленного промежутка времени. Если рекомендуемый промежуток времени больше текущего установленного промежутка времени, подтверждение водителя не требуется | Текущий временной интервал заменяют рекомендуемым временным интервалом, если водитель принимает рекомендуемый временной интервал. Окончательное значение промежутка времени эксплуатации никогда не ниже требований, указанных в таблице 2 |
Безопасная скорость от оборудования инфраструктуры на непрямолинейном участке | Да | Нет | Информирование водителя не требуется | Подтверждение водителя не требуется | Текущую установленную скорость заменяют безопасной скоростью на непрямолинейном участке |
Ограничение скорости от оборудования инфраструктуры | Да | Нет | Необходимо проинформировать водителя | Подтверждение водителя требуется, когда ограничение скорости превышает текущую установленную скорость. Подтверждение водителя не требуется, если ограничение скорости ниже текущей установленной скорости | Текущую установленную скорость заменяют ограничением скорости, если водитель принимает ограничение скорости |
Опасное состояние дороги от оборудования инфраструктуры [например, предупреждающее сообщение на обочине дороги (обледенение моста, пробка, рабочая зона и т.д.)] | Нет | Да | Необходимо проинформировать водителя | Нет | В зависимости от содержания данных I2V временной интервал может быть увеличен, максимальный предел замедления - уменьшен, возобновление круиз-контроля - заблокировано, ускорение - ограничено или заблокировано |
6.2.1.2 Когда вышеуказанные данные I2V в таблице 4 больше не представляют интереса для рассматриваемого транспортного средства, система управления транспортным средством должна вернуться к первоначальному режиму управления, который существовал до воздействия этих данных.
Управляющий переход между режимом I2V и исходным режимом управления, существовавший до воздействия данных I2V, остается на усмотрение производителя.
Пример - Транспортное средство все еще получает данные безопасной скорости на непрямолинейном участке после прохождения данного участка.
6.2.1.3 Применяемая стратегия управления для удовлетворения требований таблицы 4 остается на усмотрение производителя.
6.2.2 Требования к данным в системе КАКК I2V
Данные I2V КАКК, описанные в таблице 4, не передаются с высокой скоростью и низкой задержкой. Частота передачи 1 Гц с задержкой 750 мс должна быть достаточной.
6.3 Общие требования к оперативному управлению
6.3.2 Для всех других режимов работы или переходов между различными режимами работы требования к рывкам соответствуют ГОСТ Р 58824.
7 Методы оценки эффективности работы
7.1 Система КАКК V2V
7.1.1 Проверка дальности связи
Подключенное транспортное средство размещают в углах A, B, C и D, как показано на рисунке 3. Испытуемое транспортное средство получает данные удаленного подключенного транспортного средства по мобильной связи согласованным образом с приемлемым уровнем ошибки, который требуется для предполагаемых услуг.
7.1.2 Испытания на точность (испытания на распознавание полосы движения и порядка следования)
7.1.2.1 Испытания на распознавание полосы движения
Схема испытания на распознавание полосы движения показана на рисунке 5. Испытываемое транспортное средство следует за тремя расположенными на одном расстоянии транспортными средствами: одно в полосе движения испытываемого транспортного средства, другое в левой соседней полосе движения и третье в правой соседней полосе движения. Дальность между объектом испытания и каждым из удаленных транспортных средств составляет 40 м. Скорость всех транспортных средств составляет 15 м/с. Два заезда выполняют в противоположных направлениях (т.е. движение в одном направлении в первом заезде и движение в противоположном направлении во втором заезде). Каждый заезд выполняется в течение минимум 60 с. Испытание будет успешным, если в указанном диапазоне времени движения испытуемое транспортное средство для каждого движущегося впереди транспортного средства указывает правильную полосу движения минимум 95% времени пробега.
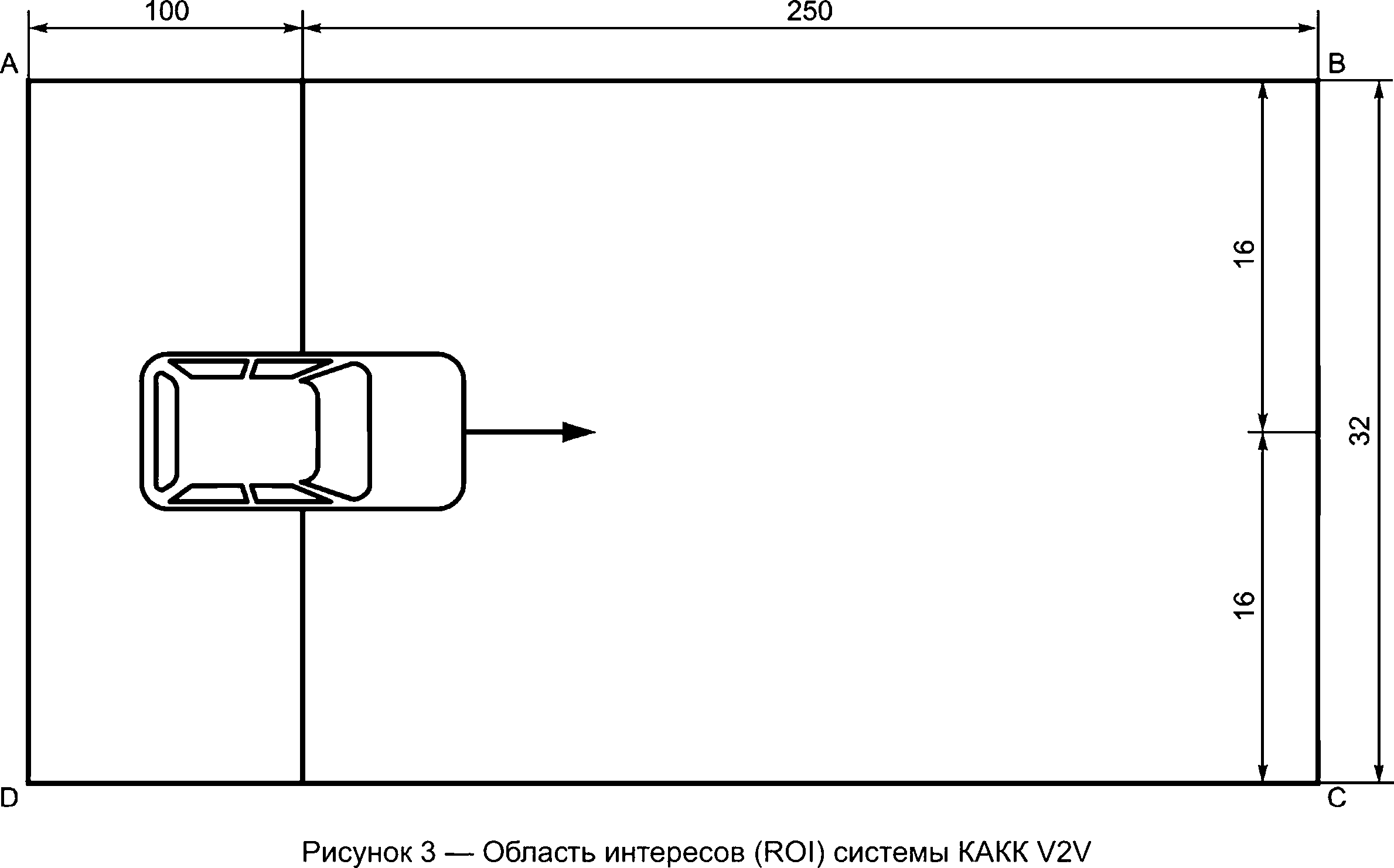 |
Рисунок 5 - Схема испытания на распознавание полосы движения
7.1.2.2 Испытание на распознавание порядка следования
Схема испытания на различение расстояния показана на рисунке 6. Рассматриваемое транспортное средство следует за двумя подключенными транспортными средствами, которые движутся по полосе движения испытуемого транспортного средства. Все транспортные средства движутся с интервалом около 5 м со скоростью 5 м/с. Если система не может установить скорость 5 м/с, то рекомендуемый интервал устанавливают на значение, максимально близкое к 5 м. Выполняют пять заездов, в течение минимум 60 с каждый. Заезд будет успешным, если в течение минимум 95% времени следования будет сообщаться, что транспортное средство E - ближайшее от испытуемого транспортного средства, а транспортное средство F движется впереди транспортного средства E.
 |
Рисунок 6 - Схема испытания на распознавание порядка следования
7.1.3 V2V Совместные режимы работы/испытания состояний
7.1.3.1 Испытание несоблюдения режима следования
На рисунке 7 рассматриваемое транспортное средство движется по главной дороге по самой правой (крайней) полосе движения. Удаленное транспортное средство движется в направлении слияния с рассматриваемой полосой движения.
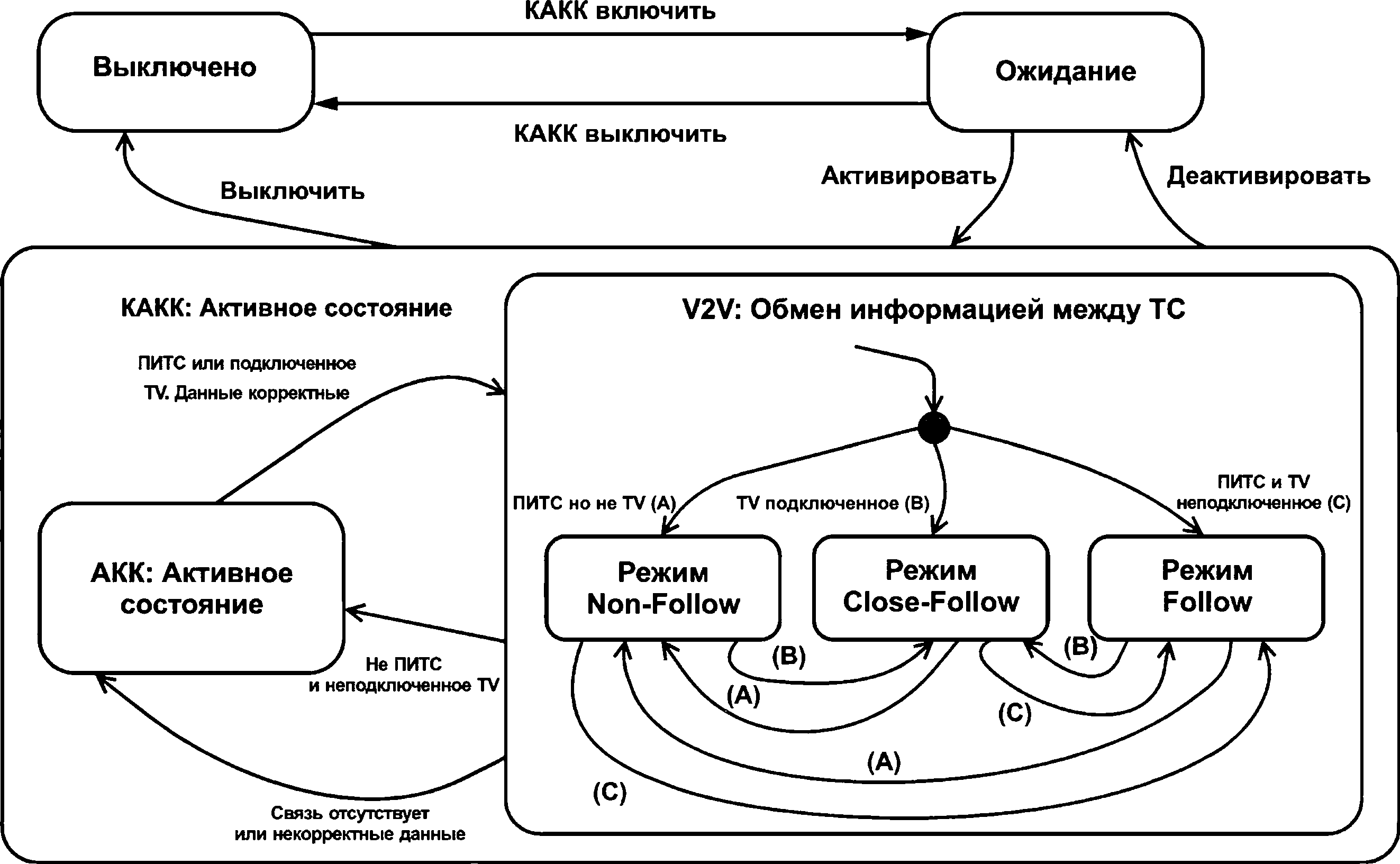 |
Рисунок 7 - Схема испытания несоблюдения режима следования
Испытуемое транспортное средство приближается к слиянию на расстоянии около 50 м и движется с установленной скоростью 27 м/с (20 м/с для грузовых автомобилей). Подключенное дистанционное транспортное средство, движущееся справа от рассматриваемого транспортного средства, имеет скорость 20 м/с (14 м/с для грузовых автомобилей). Проверка будет успешной, если кооперативная система КАКК V2V сообщает о своем рабочем состоянии как режим Non-Follow до того, как удаленно подключенное транспортное средство присоединится к полосе рассматриваемого транспортного средства.
7.1.3.2 Испытание режима Follow (переход из режима следования АКК в режим Follow КАКК)
На рисунке 8 испытуемое транспортное средство следует за транспортным средством-мишенью (А), которое не подключено (режим АКК). Оба транспортных средства движутся со скоростью 27 м/с (20 м/с для грузовых автомобилей) на расстоянии около 60 м (промежуток времени 2 с). Другое транспортное средство (В) движется в полосе движения рассматриваемого транспортного средства со скоростью 20 м/с (14 м/с для грузовых автомобилей) и опережает транспортное средство-мишень на 100 м.
На удаленном транспортном средстве B подключенное автомобильное устройство включается, когда расстояние от транспортного средства-мишени сократится до 60 м. Испытуемое транспортное средство в системе КАКК V2V должно сообщать о изменении рабочего состояния на режим Follow КАКК.
7.1.3.3 Испытание режима Close-Follow (переход из режима АКК в режим Close-Follow КАКК)
На рисунке 9 испытуемое транспортное средство следует за транспортным средством-мишенью (A), у которого устройство подключения выключено (испытываемое транспортное средство находится в режиме АКК). Оба транспортных средства движутся со скоростью 27 м/с (20 м/с для грузовых автомобилей) на расстоянии около 30 м (интервал времени 1 с). На транспортном средстве A подключенное автомобильное устройство включается на расстоянии около 30 м от испытуемого транспортного средства. Когда данные в эфире адекватно коррелируют с данными активного зондирования (требование: 6.1.5.4), система КАКК V2V сообщает о своем рабочем состоянии, как о режиме Close-Follow.
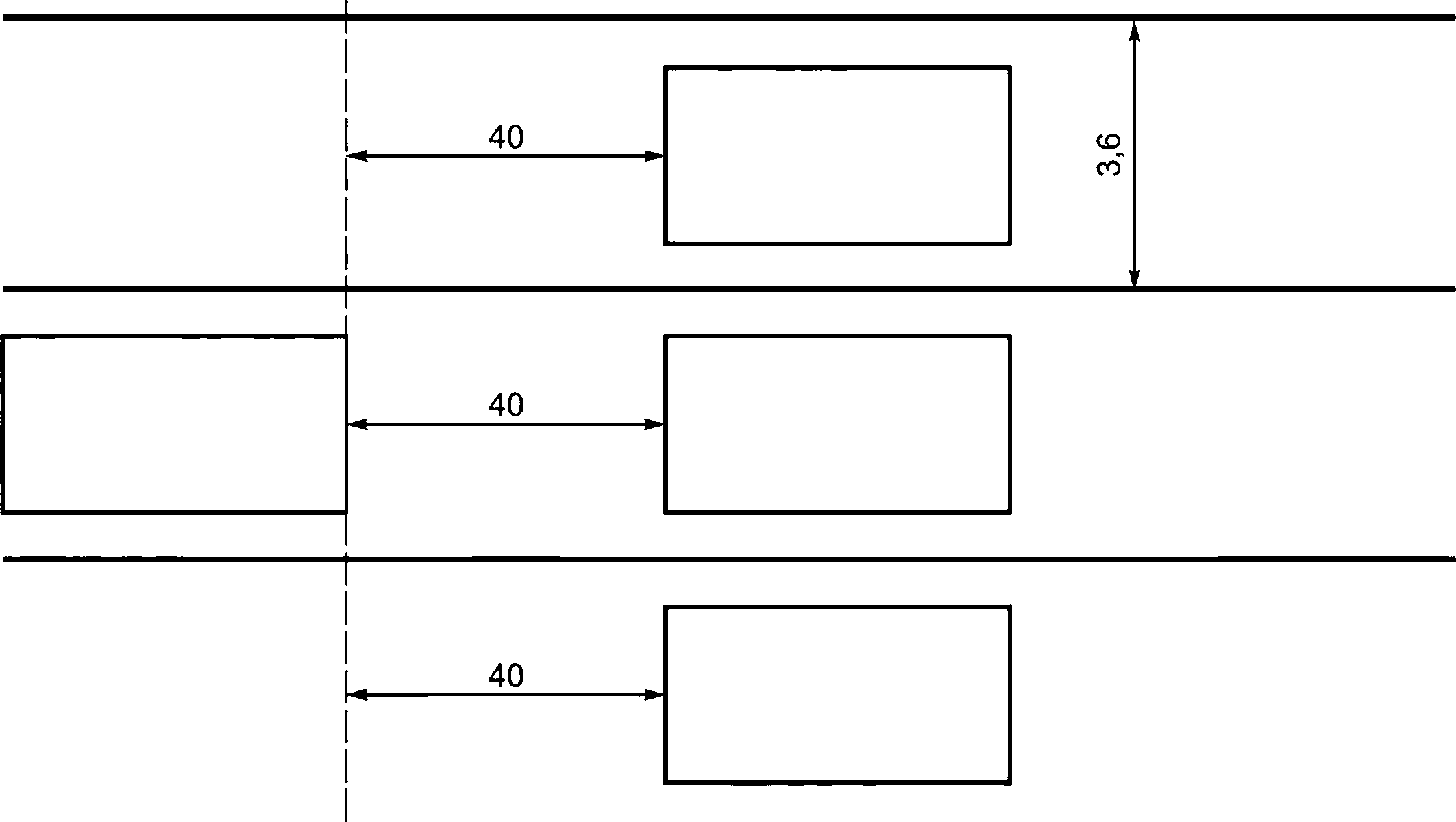 |
Рисунок 8 - Схема испытания режима следования
 |
Рисунок 9 - Схема испытания режима Close-Follow
7.1.3.4 Сценарий испытания неисправности
7.1.3.5 Испытание перехода в режим следования КАКК при встраивании другого транспортного средства (переход из режима Close-Follow в режим Follow)
Транспортное средство-мишень (C на рисунке 10) движется со скоростью 27 м/с (20 м/с для грузовых автомобилей). Испытуемое транспортное средство следует за подключенным транспортным средством-мишенью (C) с временным интервалом Close-Follow КАКК.
Другое транспортное средство (D) едет справа и позади испытуемого транспортного средства с той же скоростью. Транспортное средство D ускоряется и встраивается между испытуемым транспортным средством и транспортным средством-мишенью (C) (траектория движения транспортного средства D показана на рисунке 10). После этого автомобиль D начинает постепенно замедляться до скорости 22 м/с (15 м/с для грузовых автомобилей). Система КАКК на испытуемом транспортном средстве должна сообщать о своем рабочем состоянии в режиме Follow (переходе из режима Close-Follow в режим Follow), когда транспортное средство D переходит в ту же полосу, что и полоса испытуемого транспортного средства.
 |
Рисунок 10 - Схема испытания перехода в режим Follow
7.2 Информационный обмен между инфраструктурой и транспортным средством в системе КАКК
Испытание режима информационного обмена между инфраструктурой и транспортным средством в системе КАКК должно подтвердить, что система КАКК управляет транспортным средством на основе полученных данных из инфраструктуры. Следующие испытания предназначены для установленных требований к скорости и временному интервалу.
7.2.1 Испытания на установление заданной скорости
Испытуемое транспортное средство движется со скоростью 25 м/с (18 м/с для грузовых автомобилей). Оно получает от инфраструктуры (придорожный блок) рекомендованную скорость движения 32 м/с (22 м/с для грузовых автомобилей). Водитель подтверждает новую установленную скорость, используя интерфейс "водитель - транспортное средство" системы КАКК. Системную заданную скорость 25 м/с (18 м/с для грузовых автомобилей) заменяют рекомендуемой установленной скоростью 32 м/с (22 м/с для грузовых автомобилей).
7.2.2 Испытания на изменение временного интервала
Испытуемое транспортное средство следует за транспортным средством-мишенью с интервалом в 1 с (1,5 с для грузовых автомобилей). Оно получает от инфраструктуры (придорожный блок) рекомендуемый временной интервал 1,5 с (2 с для грузовых автомобилей). Системный временной интервал 1 с (1,5 с для грузовых автомобилей) должен быть заменен рекомендуемым временным интервалом 1,5 с (2 с для грузовых автомобилей) без подтверждения водителя.
7.3 Условия внешней среды испытаний
Все испытания должны проводиться в следующих условиях:
- под открытым небом;
- на ровной, сухой асфальтовой или бетонной поверхности;
- диапазон температур от минус 20°С до 40°С;
- горизонтальная видимость больше 1 км;
- в дневное время.
УДК 656.035:006.354 | ОКС 03.220.20 |
Ключевые слова: интеллектуальная транспортная система, корпоративная адаптивная система круиз-контроля, адаптивный круиз-контроль, связь между автомобилями, связь между автомобилем и объектом инфраструктуры | |
{kind=link}