ПНСТ 137-2016
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ
КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ УДАЛЕННОГО ВИДЕОНАБЛЮДЕНИЯ
Общие требования
Automated remote virtual surveillance system. General requirements
ОКС 03.220.50
ОКП 75 6000
Срок действия стандарта c 2016-09-19 по 2019-09-19
Предисловие
1 РАЗРАБОТАН Комитетом по аэронавигации "Союза авиапроизводителей России"
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 323 "Авиационная техника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 18 августа 2016 г. N 59-пнст
4 ВВЕДЕН ВПЕРВЫЕ
5 ПЕРЕИЗДАНИЕ. Апрель 2017 г.
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 9 мес до истечения срока его действия разработчику настоящего стандарта по адресу: [email protected] и в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074, Москва, Китайгородский проезд, д.7, стр1.
В случае отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты" и журнале "Вестник технического регулирования". Уведомление будет размещено также на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Исторически организация наземного движения на поверхности аэродрома базировалась на использовании визуального наблюдения в качестве основного метода для управления движением на взлетно-посадочной полосе и рулением, навигации и эшелонирования воздушных судов [1]-[3]*. Эти операции значительно затруднены в периоды пониженной видимости (ухудшение видимости из-за погодных условий, ночное время) и при высокой интенсивности движения. Кроме того, удаленные или закрытые для прямого обзора участки аэродромной площади не могут быть проконтролированы диспетчером, если не находятся под визуальным наблюдением. В результате возможно снижение безопасности полетов и эффективности управления наземным движением.
В связи с появлением новых (оптико-электронных) средств видеонаблюдения [4] становится возможным вести обзор летного поля с помощью технического зрения с расширенными возможностями визуализации наблюдаемой обстановки на средствах отображения информации автоматизированных рабочих мест диспетчеров управления воздушным движением. Такое улучшение функциональных возможностей позволяет диспетчерам управления воздушным движением эффективнее поддерживать осведомленность о наземных операциях в периоды низкой видимости и сложного, интенсивного движения.
В связи с этим внедрение технологий удаленного видеонаблюдения и создание на их основе комплекса средств автоматизации удаленного видеонаблюдения на аэродроме является одним из важных направлений совершенствования аэродромных средств, позволяющее обеспечить выполнение требований к безопасности полетов и эффективности использования аэродрома.
Применение комплекса средств автоматизации удаленного видеонаблюдения позволит расширить возможности наблюдения служб управления воздушным движением и аэропорта за ситуацией о наземном движении на аэродроме, обеспечивая:
- представление визуальной информации о контролируемой зоне потребителям-операторам (диспетчерам, руководителям полетов органов управления воздушным движением, операторам ситуационных центров аэропортов и т.п.) в формате "вид из окна", эквивалентном естественному обзору;
- исключение "слепых" зон на аэродроме для оперативного наблюдения за наземной обстановкой.
1 Область применения
Настоящий стандарт устанавливает основные параметры и технические требования к вновь разрабатываемым комплексам средств автоматизации удаленного видеонаблюдения (КСА УВН), являющимся составной частью усовершенствованной системы управления наземным движением (УС УНД) аэродрома [5] или удаленного диспетчерского обслуживания полетов [6].
2 Термины, определения и сокращения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1.1* видеонаблюдение: Процесс, основанный на сборе и обработке визуальной информации с использованием оптико-электронных систем.
Примечание - Объектами видеонаблюдения могут являться люди или другие объекты, если их параметры соответствуют заданным характеристикам обнаружения.
2.1.2 зона видимости автономного модуля наблюдения (панорамного/детального наблюдения): Часть пространства рабочей площади аэродрома, в котором обеспечивается обнаружение/распознавание объектов, находящаяся в поле зрения однотипных камер данного автономного модуля наблюдения.
2.1.3 метеорологическая дальность видимости (метеорологическая оптическая дальность) MOR, м (км): Длина пути в атмосфере, создающая ослабление светового потока в коллимационном пучке от лампы накаливания при цветовой температуре 2700 K до 0,05 его первоначального значения; при этом световой поток оценивается по функции фотометрической яркости, которая определена Международной светотехнической комиссией (CIE).
2.1.4 обнаружение: Нижний уровень процесса наблюдения и принятия решений, соответствующий выделению некоторого объекта на фоне помех.
Примечание - При использовании критерия Джонсона обнаружение объекта на основе оптико-электронной системы обеспечивается, если линейный размер изображения объекта составляет два элемента разрешения, а вероятность верного принятия решения оператором не хуже 0,5.
2.1.5 оператор: Диспетчер управления воздушным движением, руководитель полетов командного пункта, оператор ситуационного центра аэропорта или оператор средств КСА УВН.
2.1.6 оптико-электронные системы: Системы, в состав которых входят оптические и электронные узлы, обеспечивающие выполнение задач обнаружения, распознавания и получения информации о положении, размерах, форме, энергетическом состоянии объектов наблюдения, обнаружения и распознавания.
2.1.7 отсутствие ограничений по прямой видимости: Условие наблюдения, при котором ограничения по видимости считаются несущественными (отсутствующими), т.е. контраст удаленного объекта, снижающийся под влиянием рассеивания оптического излучения в атмосфере, наблюдаемый визуально или на экране видеоконтрольного устройства (монитора), сохраняет значение, превышающее порог контрастной чувствительности глаза.
2.1.8 поле зрения камеры: Охватываемое камерой видимое пространство, размер которого характеризуют дальность видимости, фокусное расстояние оптической системы и линейный размер матричного фотоприемника камеры.
2.1.9 распознавание: Уровень процесса наблюдения и принятия решений, соответствующий определению класса объекта.
Примечание - При использовании критерия Джонсона распознавание объекта на основе оптико-электронной системы обеспечивается, если линейный размер изображения объекта составляет восемь элементов разрешения.
2.1.10 элемент разрешения: Проекция чувствительной площадки (пикселя) матричного фотоприемника в пространство фоно-целевой обстановки.
Примечание - Определяется линейными размерами пикселя и фокусным расстоянием объектива.
2.1.11 ИК прожектор подсвета: Направленный источник инфракрасного излучения, применяемый в целях освещения объектов наблюдения.
2.1.12 формат "вид из окна": Представление визуальной информации об обстановке на аэродроме в виде панорамного изображения, наблюдаемого с помощью источников оптико-электронного наблюдения, эквивалентного виду из диспетчерского зала командно-диспетчерского пункта.
2.1.13 условия видимости:
Примечания
1 Адаптировано из [5] для целей настоящего стандарта.
2 Значение нижнего порога MOR, при котором КСА УВН может обеспечивать требуемые характеристики, зависит от дальности установки автономных модулей наблюдения от взлетно-посадочной полосы и прилегающих рулежных дорожек. Поэтому рекомендуется размещать автономные модули наблюдения так, чтобы обеспечить визуальное наблюдение при MOR=1000 м.
2.1.14 поворотная PTZ-камера: Камера детального наблюдения с такими возможностями, как панорамирование (поворот в горизонтальной плоскости), наклон (поворот в вертикальной плоскости) и зум (изменение оптического увеличения).
2.2 В настоящем стандарте применены следующие сокращения:
АМН - автономный модуль наблюдения;
АРМ - автоматизированное рабочее место;
ВПП - взлетно-посадочная полоса;
ВС - воздушное судно;
ИК - инфракрасная камера;
КДП - командно-диспетчерский пункт;
КП - командный пункт (руководства полетами);
КСА УВН - комплекс средств автоматизации удаленного видеонаблюдения;
РД - рулежная дорожка;
РМС - радиомаячная система посадки;
СТУК - средства технического управления контроля;
ТВ - телевизионная (камера);
ТС - транспортное средство;
УВД - управление воздушным движением;
УС УНД - усовершенствованная система управления наземным движением;
UTC - всемирное скоординированное время.
3 Общие положения
3.1 КСА УВН предназначен для обеспечения наблюдения за движением ВС, ТС и других объектов на аэродроме, а также ВС, выполняющих взлет и посадку.
КСА УВН применяют как автономно, так и в комплексе с другими аэродромными системами и средствами УВД.
3.2 КСА УВН должен состоять из следующих элементов:
а) средства (источники) оптико-электронного наблюдения;
б) средства КДП;
в) система обработки и хранения данных видеонаблюдения;
г) средства передачи данных;
д) средства электропитания.
3.3 Комплект средств (источников) оптико-электронного наблюдения в своем составе должен содержать не менее одного АМН. Модуль АМН может включать в себя определенный комплект телевизионных (ТВ) или инфракрасных (ИК) камер. В КСА УВН применяют модули АМН следующих видов:
а) панорамный АМН - стационарные камеры панорамного обзора с фиксированным углом поля зрения (ИК, ТВ);
б) детальный АМН - поворотная PTZ-камера детального обзора (ИК, ТВ).
3.4 Комплекс средств КДП в своем составе должен содержать:
а) АРМ операторов (не менее одного) для обеспечения выполнения операторами функций визуального наблюдения за наземным движением и/или за ВС на конечном этапе захода на посадку в составе:
- групповой индикатор с мониторами для панорамного отображения контролируемой зоны аэродрома (и/или глиссады),
- индикатор рабочего места с монитором для детального отображения объектов в контролируемой зоне аэродрома (и/или на глиссаде) и для управления камерами и настройками,
- рабочая станция.
Примечание - В зависимости от потребностей один групповой индикатор используется одним или несколькими операторами;
б) АРМ сменного инженера для выполнения функций технического управления и контроля КСА УВН.
Примечание - Допустимо применение АРМ СТУК в серверном исполнении;
в) автоматизированное место администратора для выполнения функций конфигурирования КСА УВН.
Примечание - Допустимо объединение функций технического управления и контроля и конфигурирования КСА УВН в АРМ СТУК.
3.5 Система обработки и хранения данных видеонаблюдения в своем составе должна содержать:
3.5.1 Сервер обработки и хранения данных видеонаблюдения (не менее одного) для обеспечения выполнения обработки и документирования данных наблюдения, поступающих от источников оптико-электронного наблюдения.
Примечание - Рекомендуется иметь резервирование системы обработки и хранения данных видеонаблюдения и АРМ операторов.
3.6 Средства передачи данных должны обеспечивать информационное взаимодействие между составными частями КСА УВН и обеспечивать возможность трансляции потока видеоданных от позиции АМН на КДП.
Примечание - Рекомендуется иметь резервирование каналов передачи данных.
3.7 Средства электропитания должны обеспечивать работоспособность составных частей КСА УВН при кратковременных сбоях напряжения в линиях электросети.
4 Состав и источники данных видеонаблюдения
4.1 Основные положения
4.1.1 Функцией КСА УВН является визуальное наблюдение подвижных и неподвижных объектов на поверхности аэродрома, а также в воздушном пространстве на начальном и заключительном этапах полета ВС с помощью оптико-электронных систем.
4.1.2 Данные, собранные из одного или нескольких источников видеонаблюдения, воспроизводятся на средствах отображения АРМ операторов.
4.1.3 Для получения постоянной и достоверной информации о ситуации воздушного движения на аэродроме состав и качество данных видеонаблюдения должны соответствовать задаваемым требованиям к эксплуатационным характеристикам.
4.1.4 Техническое решение по составу и размещению источников видеонаблюдения должно обеспечивать эквивалентный и беспрепятственный визуальный обзор всех элементов аэродрома и воздушной зоны в пределах, установленных для операторов границ зоны ответственности.
4.1.5 Состав и требования к источникам данных видеонаблюдения определяются внешними факторами: местными условиями рельефа, искусственными препятствиями для прямого обзора, условиями освещенности, а также метеоусловиями.
4.2 Требования к условиям применения
4.2.1 В зависимости от условий видимости (или ограничений видимости), при которых нужно обеспечивать функции визуального наблюдения на конкретном аэродроме, рекомендуется рассматривать ряд базовых вариантов состава и размещения (конфигурации) источников видеонаблюдения КСА УВН. Рекомендуемые конфигурации средств видеонаблюдения приведены в приложении А.
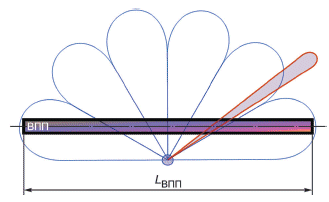
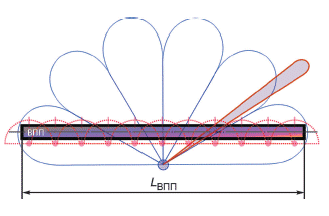
4.2.2 В условиях видимости 1, день, наблюдение зоны маневрирования аэродрома следует осуществлять панорамным и детальным (ТВ) модулями.
Для решения задачи обнаружения воздушных судов и транспортных средств применяют панорамный ТВ модуль. В состав типового панорамного модуля должны входить одна или более телевизионных камер формата FullHD с суммарным полем зрения до 180°. Конфигурация данного модуля должна обеспечивать темп обновления информации, поле зрения и разрешающую способность, аналогичную соответствующим параметрам зрительного анализатора в соответствии с критерием "вид из окна".
Для решения задачи распознавания (классификации и идентификации) следует применять детальный ТВ модуль, являющийся функциональным аналогом бинокля. Угловое положение линии визирования, а также увеличение масштаба изображения реализуется с применением PTZ-технологии.
4.2.3 В условиях видимости 1, ночь, наблюдение должно быть осуществлено применением одного из двух вариантов использования панорамного и детального модулей (ТВ, ИК).
4.2.3.1 Первый вариант применения реализуется использованием панорамного и детального ИК модулей.
Для решения задачи обнаружения следует применять типовой панорамный ИК модуль, в состав которого входят одна или более ИК камера с суммарным полем зрения до 180°.
Для решения задачи распознавания следует применять детальный ИК модуль.
4.2.3.2 Второй вариант применения реализуется использованием панорамного и детального ТВ модулей и ИК прожекторов подсвета.
Подсвет осуществляется линейкой равноудаленных ИК прожекторов с широкой диаграммой направленности, располагающихся вдоль ВПП и РД (эквидистантной линейкой прожекторов).
Для решения задачи обнаружения ВС и ТС применяют типовой панорамный ТВ модуль.
Для решения задачи распознавания следует применять детальный ТВ модуль.
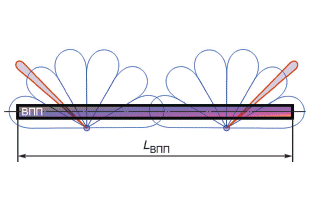
4.2.4 В отношении условий видимости 2, день, наблюдение следует осуществлять двумя или более панорамными и детальными ТВ модулями. Число требуемых модулей зависит от выбора позиции модулей относительно ВПП и РД исходя из требуемого нижнего порогового значения видимости для визуального наблюдения.
4.2.5 В отношении условий 2, ночь, наблюдение следует осуществлять двумя или более панорамными и детальными ИК модулями либо двумя или более панорамными и детальными ТВ модулями с использованием ИК прожекторов подсвета.
4.2.6 Для решения задачи обнаружения ВС судов на глиссаде следует применять типовой панорамный ТВ модуль. Для решения задачи распознавания ВС на глиссаде (классификации и идентификации) также следует применять детальный ТВ модуль.
4.2.7 Рекомендуемые конфигурации обеспечивают реализацию параметров, приведенных в приложении Б.
5 Требования к эксплуатационным характеристикам
5.1 Общие положения
5.1.1 КСА УВН должен обеспечивать видеонаблюдение определенных зон аэродрома на основе обработки и отображения информации, получаемой от оптико-электронных систем (источников) наблюдения.
5.1.2 КСА УВН должен обладать открытой модульной архитектурой с возможностью наращивания программно-аппаратных средств и решаемых функциональных задач.
5.1.3 КСА УВН должен обеспечивать возможность синхронизации от внешнего стандартного источника времени UTC.
5.1.4 КСА УВН должен обеспечивать обработку и отображение данных видеонаблюдения в масштабе реального времени.
5.2 КСА УВН должен обеспечивать одновременное выполнение режимов наблюдения:
- панорамного обзора в формате "вид из окна";
- детального обзора с использованием РТZ-камер(ы).
5.3 КСА УВН должен обеспечивать:
а) наблюдение объектов движения (ВС и ТС), находящихся в поле зрения камер видеонаблюдения АМН;
б) отображение на групповом индикаторе:
- панорамного изображения от панорамных(ого) АМН,
- изображения от детального АМН при его наличии и необходимости отображения данной информации,
- изображения от глиссадного АМН при его наличии и необходимости отображения данной информации;
в) отображение в увеличенном масштабе выбранного объекта, а также выбранной зоны (при наличии детального АМН);
г) отображение на индикаторе АРМ оператора органов управления камерой детального обзора (кнопки выбора предустановленных зон наблюдения, кнопки точного управления) с выводом минипанорамы и изображения от камер детального обзора;
д) получение несколькими операторами одного и того же панорамного изображения на индикаторах АРМ без помех друг другу;
е) автоматическую настройку фокуса камеры детального обзора с помощью функции автофокусировки или с помощью заданных настроек (при наличии детального АМН);
ж) ручное управление камерами детального обзора (при наличии детального АМН), в том числе стандартными органами управления АРМ (мышь, клавиатура);
и) документирование информации; хранение не менее 30 сут данных видеонаблюдения с возможностью их воспроизведения на АРМ оператора.
5.4 Характеристики видеонаблюдения КСА УВН должны отвечать требованиям, приведенным в 5.4.1-5.4.6.
5.4.1 В панорамном ТВ-режиме при отсутствии ограничений по видимости и минимальной освещенности на местности 5000 лк должны быть обеспечены следующие характеристики:
в) кадровая частота: не менее 15 кадров/с;
г) возможность обнаружения оператором в дневных условиях объектов типа автомобиль сопровождения и легкомоторный самолет - на дальности 1500 м (рекомендация - 2000 м) и менее от места установки камеры.
5.4.2 В панорамном ИК-режиме при отсутствии ограничений по видимости должны быть обеспечены следующие характеристики:
б) кадровая частота: не менее 15 кадров/с;
в) возможность обнаружения оператором объектов типа автомобиль сопровождения и легкомоторный самолет - на дальности 1500 (рекомендация - 2000) м и менее от места установки камеры.
5.4.3 В режиме детального ТВ-обзора при отсутствии ограничений по видимости и минимальной освещенности на местности 5000 лк должны быть обеспечены следующие характеристики:
в) возможность распознавания оператором объектов типа:
- автомобиль сопровождения - на дальности 2000 м и менее,
- легкомоторный самолет - на дальности 4000 м и менее от места установки камеры;
г) наведение: по азимуту 0°-360°, по углу места -45°-45° с угловой скоростью не менее 40°/с.
5.4.4 Стабильное, высококонтрастное, без "плавания" и "дрожания", без искажения конфигурации изображение по всему полю экрана.
Примечание - Допустимо наличие геометрических искажений (бочкообразная и подушкообразная дисторсия, кривизна поля), не приводящих к снижению эффективности обнаружения и распознавания ВС и ТС.
5.4.5 В режиме детального ИК-обзора при отсутствии ограничений по видимости должны быть обеспечены следующие характеристики:
в) возможность распознавания оператором объектов типа:
автомобиль сопровождения - на дальности 700 м и менее,
легкомоторный самолет - на дальности 1200 м и менее от места установки камеры;
г) наведение: по азимуту 0°-360°, по углу места -45°-45° с угловой скоростью не менее 40°/с.
5.4.6 Применяемая подсветка ИК-сигнала должна быть низкого диапазона, чтобы исключить вредные воздействия на человека.
5.5 Групповая система отображения (при наличии) должна обеспечивать:
а) отображение изображения в соответствии с перечислением б) 5.3;
б) возможность управления настройками только от одного оператора.
5.6 АРМ СТУК КСА УВН должно выполнять следующие функции:
а) мониторинг работоспособности элементов системы;
б) оперативное определение отказов.
5.7 В КСА УВН должны выполняться следующие требования к электропитанию:
а) КСА УВН должен быть рассчитан на питание от электросети переменного тока напряжением 220 В±10% и частотой 50 Гц±1%;
б) КСА УВН должен обеспечивать работоспособность при пропадании напряжения электросети на время не менее 15 мин.
5.8 КСА УВН должен отвечать требованиям к прочности и устойчивости к воздействию внешних условий, приведенным в 5.8.1, 5.8.2.
5.8.1 Аппаратура КСА УВН, установленная в обитаемом помещении, должна работать при следующих условиях:
а) пониженные температуры окружающего воздуха - плюс 10°C;
б) повышенные температуры окружающего воздуха - плюс 25°C;
в) верхнее рабочее значение относительной влажности воздуха - 80% при 25°C.
5.8.2 Аппаратура КСА УВН, установленная вне обитаемых помещений, должна работать при следующих условиях:
а) пониженные температуры окружающего воздуха - минус 40°C;
б) повышенные температуры окружающего воздуха - плюс 40°C;
в) значение изменения температуры окружающего воздуха за 8 ч - 20°C с переходом температуры через 0°C;
г) верхнее рабочее значение относительной влажности воздуха - 98% при 25°C;
д) интенсивность дождя (верхнее рабочее значение) - 3 мм/мин;
е) аппаратура должна сохранять работоспособность при образовании на ней гололеда;
ж) верхнее предельное значение скорости ветра составляет 50 м/с.
5.9 КСА УВН должен отвечать требованиям к безопасности, приведенным в 5.9.1-5.9.4.
5.9.1 Программное обеспечение КСА УВН должно быть защищено от несанкционированного доступа путем администрирования (разграничения) прав доступа персонала всех уровней.
5.9.2 Должна быть исключена возможность изменения информации, задокументированной средствами КСА УВН.
5.9.3 Доступ к информационным блокам, схемам технических средств должен осуществляться с использованием элементов технического контроля доступа (опечатывание, замки и т.п.).
5.9.4 Должны быть обеспечены:
а) целостность и восстановление данных при аппаратных и программных сбоях и отказах;
б) защита данных от разрушений при отказах и сбоях в электропитании КСА УВН.
6 Требования по размещению и установке автономных модулей наблюдения
6.1 Автономные модули наблюдения следует размещать на специальных мачтах (опорах), с учетом критических зон РМС. При этом должно быть обеспечено выполнение требований 6.1.1-6.1.8.
6.1.1 Мачты (опоры) должны сохранять работоспособность в условиях внешней среды:
а) температура окружающего воздуха от минус 50°С до плюс 50°C;
б) относительная влажность воздуха не более 98% при температуре 25°С.
6.1.2 Мачты (опоры) должны быть устойчивыми к воздействию:
а) воды, снега и инея;
б) соляного тумана;
в) солнечной радиации;
г) динамической пыли (песка);
д) синусоидальной вибрации в диапазоне частот от 10 до 80 Гц с амплитудой ускорения 4g.
6.1.3 Конструкция мачт (опор) должна выдерживать ветровую нагрузку 50 м/с.
6.1.4 Конструкция мачты (опоры) должна обеспечивать возможность ее опрокидывания и подъема.
6.1.5 Мачты (опоры) должны быть окрашены (маркированы).
6.1.6 На мачты (опоры) должен быть установлен срок службы.
6.1.7 Эксплуатационная документация должна содержать необходимую информацию по монтажу, использованию, техническому обслуживанию, транспортированию и хранению мачт (опор).
6.1.8 При необходимости конструкция мачты (опоры) должна обеспечивать возможность прокладки внутри нее кабелей питания огней.
Примечание - Допустимо размещение нескольких АМН на одной мачте (опоре).
6.2 Размещение АМН должно обеспечивать выполнение функциональных задач в части требуемых характеристик наблюдения.
6.3 Маркировка и светоограждение мачт (опор) для размещения АМН должны быть обеспечены согласно требованиям ведомства, в соответствии с правилами которого эксплуатируется аэродром размещения КСА УВН.
Приложение А
(справочное)
Рекомендуемые конфигурации средств видеонаблюдения
Таблица А.1
Условия видимости 1
(MOR 2000 м) | Условия видимости 2
(1000* м MOR<2000 м) |
1 День (панорама-ТВ+PTZ-TB) | |
 |  |
2 Ночь (первый способ применения: панорама-ИК+PTZ-ИК) | |
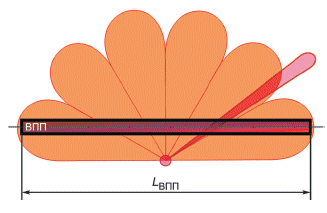 | 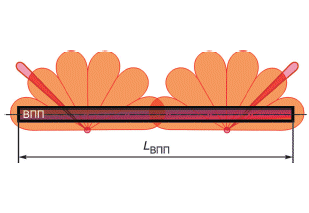 |
3 Ночь (второй способ применения: панорама-ТВ+PTZ-TB+ИК-прожекторы) | |
 | 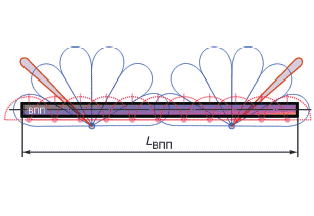 |
4 Наблюдение за глиссадой, день (наблюдение ТВ+PTZ-ТВ) | |
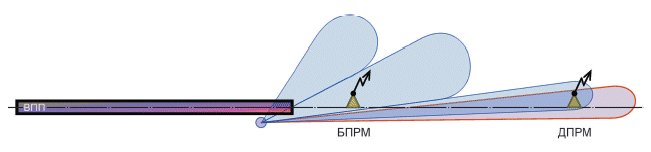 | |
* Зависит от дальности установки АМН относительно ВПП и прилегающих РД. Примечание - - длина ВПП; БПРМ - ближний приводной радиомаяк; ДПРМ - дальний приводной радиомаяк. | |
Приложение Б
(справочное)
Источники и характеристики применения видеонаблюдения
Тип модуля (источники данных) | Область наблюдения | Условия применения | Характеристики каналов | ||||||
| Площадь маневри- рования | Перрон | Сектор взлета/ посадки | Кругло- суточно | Условия видимо- сти 1 | Условия види- мости 2 | Обнару- жение ВС, ТС | Распоз- навание (класси- фикация) | Иденти- фикация |
Панорамный ТВ модуль | + | + | + | + | + | + | + | - | - |
Детальный ТВ модуль | + | + | + | + | + | + | - | + | + |
Панорамный ИК модуль | + | + | + | + | + | + | + | - | - |
Детальный ИК модуль | + | + | + | + | + | + | - | + | - |
При наличии ИК прожекторов подсвета. При наличии ИК прожекторов подсвета. При формировании эквидистантной линейки панорамных ИК модулей. | |||||||||
Библиография
[1] | ФАП N 293 | Организация воздушного движения в Российской Федерации |
[2] | ICAO Doc 4444* | Правила аэронавигационного обслуживания. Организация воздушного движения |
[3] | ICAO Doc 9426 | Руководство по планированию обслуживания воздушного движения |
[4] | ФАП N 297 | Радиотехническое обеспечение полетов воздушных судов и авиационная электросвязь в гражданской авиации |
[5] | ICAO Doc 9830-AN/452 | Руководство по усовершенствованным системам управления наземным движением и контроля за ним |
[6] | ICAO Doc 9750 | Глобальный аэронавигационный план применительно к системам GNS/ATM |
УДК 347.822.4:006.354 | ОКС 03.220.50 | ОКП 75 6000 | |
Ключевые слова: управление воздушным движением, безопасность полетов, аэродром, автоматизированная система, средства наблюдения, управление наземным движением, визуальное наблюдение, оператор, параметры, видеокамера | |||
{kind=link}