ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТР 60.6.3.28— 2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Проходимость.
Преодоление бруса разной высоты
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 864-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е3311/ Е3311М—22 «Стандартный метод испытаний для оценки возможностей наземных роботов и навыков удаленного оператора. Препятствия. Брус разной высоты» (ASTM Е3311/3311М—22 «Standard Test Method for Evaluating Ground Robot Capabilities and Remote Operator Proficiency: Obstacles: Variable Height Rails», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте, приведены в дополнительном приложении ДБ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 Краткое описание метода испытаний
5 Применение метода испытаний
6 Требования к испытательному оборудованию
7 Требования безопасности
8 Порядок проведения испытаний
9 Подсчет и интерпретация результатов
10 Требования к отчетности
11 Погрешность метода испытаний
Приложение ДА (рекомендуемое) Форма протокола испытаний
Приложение ДБ (справочное) Сведения о соответствии ссылочных национальных стандартов
стандартам, использованным в качестве ссылочных в примененном стандарте .... 16
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью разработки данных стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой из перечисленных тематических групп могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Виды и методы испытаний» и распространяется на сервисные мобильные роботы, предназначенные для работы в экстремальных условиях. Настоящий стандарт определяет методы и способы испытаний проходимости при преодолении препятствий в виде бруса разной высоты.
Настоящий стандарт является модифицированным по отношению к АСТМ Е3311/3311М—22, разработанному техническим комитетом Е54 ASTM International «Прикладные системы для национальной безопасности» в соответствии с принципами стандартизации, установленными в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для его приведения в соответствие с требованиями основополагающих национальных и межгосударственных стандартов. Область применения настоящего стандарта ограничена в отличие от примененного АСТМ Е3311/3311М—22 для роботов, используемых в экстремальных условиях.
В настоящий стандарт внесены следующие технические отклонения по отношению к АСТМ Е3311/3311М—22:
- не включены примечания и сноски примененного стандарта, которые нецелесообразно применять в российской национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны исключительно в Международной системе единиц (СИ), используемой в российской национальной стандартизации в соответствии с требованиями ГОСТ 8.417—2002, тогда как в примененном стандарте значения измерений указаны как в системе единиц СИ, так и в американских единицах (дюйм-фунт); соответственно, пункт 1.5 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт и нумерация пункта 1.6 примененного стандарта изменена на 1.5;
- пункт 1.7 примененного стандарта не включен в настоящий стандарт, т. к. его содержание приведено во введении;
- раздел 1 «Область применения» приведен в соответствие с требованиями ГОСТ 1.5—2001;
- в раздел 2 «Нормативные ссылки» настоящего стандарта не включены ссылки на документы системы стандартизации США, которые нецелесообразно применять в российской национальной стандартизации;
- в соответствии с ГОСТ Р 1.7—2014, ГОСТ 1.3—2014, ГОСТ Р 1.5—2012 и ГОСТ 1.5—2001 включен раздел 3 «Термины и определения» вместо использованного в примененном стандарте раздела 3 «Терминология»;
- пояснения к терминологическим статьям в настоящем стандарте оформлены как примечания в соответствии с ГОСТ 1.5—2001 вместо использованных в примененном стандарте подпунктов «Обсуждение»;
- определения терминов приведены в соответствии с действующими стандартами;
- терминологические статьи расположены в алфавитном порядке русского языка и оформлены в соответствии с требованиями ГОСТ 1.5—2001;
- изменена нумерация рисунков, начиная с рисунка 2, ввиду необходимости соблюдения требований национальной стандартизации;
- рисунок 8 примененного стандарта, содержащий рекомендуемую форму протокола испытаний, приведен в дополнительном приложении ДА, чтобы у разработчиков технической документации роботов была возможность ссылаться в конструкторских документах на данное приложение в соответствии с ГОСТ Р 2.105—2019 (пункт 6.11.2);
- ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5—2001 вместо раздела 12 «Ключевые слова» в примененном стандарте.
ГОСТ Р 60.6.3.28—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Проходимость.
Преодоление бруса разной высоты
Robots and robotic devices. Test methods for service mobile robots for work in extreme conditions. Mobility. Passing variable height rails
Дата введения — 2024—01—01
1 Область применения
1.1 Настоящий стандарт распространяется на дистанционно управляемые наземные роботы, работающие в сложных, неструктурированных и часто опасных условиях, устанавливает метод испытаний и определяет испытательное оборудование, порядок проведения испытаний и показатели для количественной оценки возможностей робота по преодолению бруса разной высоты. Данный метод испытаний является одним из ряда испытаний, характеризующих такое эксплуатационное качество мобильных роботов, как проходимость.
1.2 Робототехнический комплекс для работы в экстремальных условиях предусматривает присутствие удаленно расположенного оператора, управляющего выполнением большинства функций, поэтому в состав комплекса следует включить бортовую камеру на роботе и дисплей у оператора. Данный метод испытаний применяют для оценки дистанционно управляемых или автономных действий робота, обеспечивающих повышение эффективности или производительности робототехнических комплексов с дистанционным управлением.
1.3 Разные категории пользователей могут устанавливать собственные количественные значения параметров, определенных в настоящем стандарте, в зависимости от конкретных условий, в которых будет эксплуатироваться робот.
1.4 Испытания согласно данному методу допускается проводить в любом месте, где можно воспроизвести необходимые условия внешней среды и установить испытательное оборудование.
1.5 Требования настоящего стандарта не распространяются на все задачи безопасности, связанные с его применением, при их наличии. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до момента использования настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 60.0.0.4—2023 Роботы и робототехнические устройства. Термины и определения
ГОСТ Р 60.6.3.1—2019 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Термины и определения
ГОСТ Р 60.6.3.25—2023 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Логистика. Развертывание роботов после транспортировки
Издание официальное
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТР 60.0.0.4 и ГОСТ Р 60.6.3.1, а также следующие термины с соответствующими определениями:
3.1
автономный режим работы: Режим работы, при котором мобильный робот получает задание от оператора или внешней системы управления, с которой взаимодействует, и выполняет его без дальнейшего взаимодействия с оператором или внешней системой.
[ГОСТ Р 60.6.0.1—2021, статья 2]
3.2 брус разной высоты (variable height rail): Препятствие в виде пиломатериала, размеры которого обеспечивают его установку на испытательном стенде под углом 45° к направлению движения робота.
3.3 настил (subfloor): Основание стенда из ориентированно-стружечной плиты или аналогичного материала с деревянными ограждениями, к которому могут быть присоединены другие настилы и на котором могут быть расположены компоненты испытательного стенда, такие как профили поверхности или препятствия.
3.4
операторский пульт управления; ОПУ (operator control unit; OCU): Устройство, используемое оператором для телеуправления роботом.
[ГОСТР 60.6.3.10—2019, пункт 3.7]
3.5
протокол испытаний (test form): Документ, содержащий необходимые сведения об объекте испытаний, применяемых методах, средствах и условиях испытаний, результаты испытаний, а также заключение по результатам испытаний, оформленный в установленном порядке.
[ГОСТ 16504—81, статья 24]
3.6 ширина прохода на испытательном стенде W (apparatus clearance width; И/): Размерный параметр испытательного стенда, выбираемый в зависимости от намеченных условий использования робота по назначению.
4 Краткое описание метода испытаний
4.1 Испытания согласно данному методу должен выполнять оператор в режиме телеуправления из указанного руководителем испытаний рабочего места оператора с помощью операторского пульта управления. Рабочее место оператора должно быть расположено и оборудовано таким образом, чтобы изолировать оператора от прямого визуального и звукового контакта с испытательным оборудованием и роботом. Робот должен пересечь испытательный стенд с установленными ограничивающими стенами или без них, преодолев диагонально расположенный брус разной высоты (см. рисунок 1). Данный метод испытаний требует, чтобы робот мог двигаться при наклоне и/или боковом крене корпуса, обеспечивать необходимую силу сцепления с поверхностью, а также управление изменяемой конфигурацией шасси и узлами сочленения.
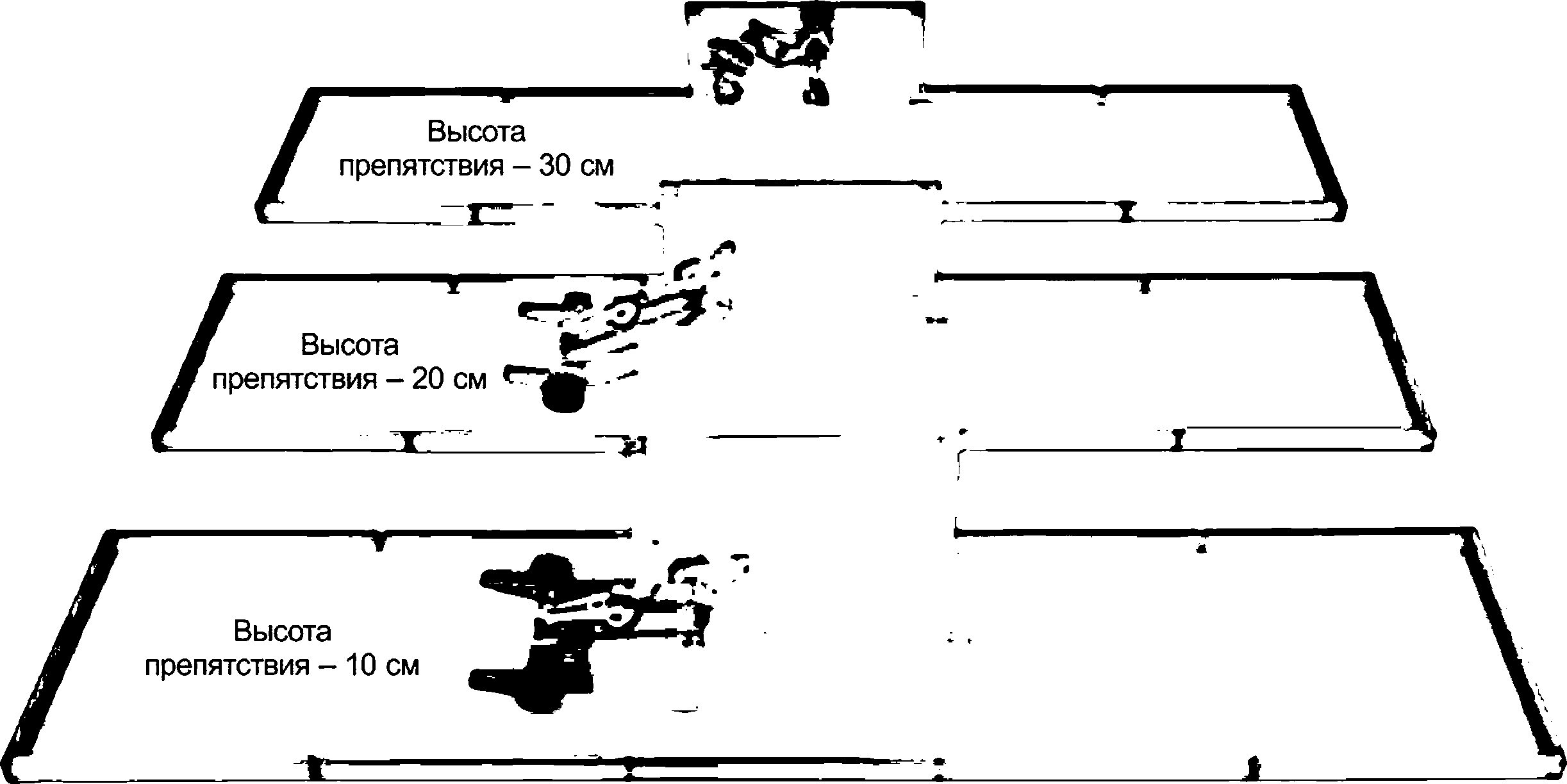
Рисунок 1 — Вид препятствия в виде бруса разной высоты, показаны препятствия высотой 10, 20, 30 см
4.2 Робот должен двигаться по маршрутам, показанным на рисунке 2. Робот начинает движение со стороны А испытательного стенда, переезжает на сторону В в зону ближайшего въезда, преодолевает препятствие в виде бруса разной высоты, далее в зону выезда на противоположном конце испытательного стенда и после этого возвращается на сторону А для завершения данной попытки. Затем робот начинает следующую попытку, переезжает обратно на сторону В и продолжает движение по испытательному стенду в противоположном направлении.
4.3 Робот должен двигаться по маршруту, используя одну из двух ориентаций, характерных для его обычной эксплуатации: произвольную ориентацию или движение передним/задним ходом. Произвольная ориентация позволяет роботу двигаться любым выбранным оператором способом на протяжении всего испытания. Движение передним/задним ходом требует, чтобы робот при выполнении каждой попытки попеременно двигался передним или задним ходом. Поскольку при выполнении каждой последующей попытки направление движения по испытательному стенду меняется на противоположное, робот не должен разворачиваться между окончанием одной попытки и началом следующей. При этом полученные данные по двум направлениям движения несопоставимы между собой.
4.4 Существуют три конфигурации испытательного стенда: открытая, ограниченная прямоугольная и ограниченная квадратная. В открытой конфигурации стены вокруг зон въезда и выезда не устанавливают. Открытая конфигурация моделирует работу робота в той среде, в которой препятствия отсутствуют. В ограниченных прямоугольной и квадратной конфигурациях устанавливают стены вокруг зон въезда/выезда. Стены ограничивают маршрут движения робота по испытательному стенду и моделируют работу робота в ограниченном пространстве. В ограниченной квадратной конфигурации доступная для маневрирования робота площадь составляет половину площади ограниченной прямоугольной конфигурации.
Открытая зона въезда/выезда
Сторона В
Сторона А Старт/финиш
Прямоугольная зона въезда/выезда
Сторона В
Сторона А Старт/финиш
Квадратная зона въезда/выезда
Сторона В
Сторона А Старт/финиш

Примеры маршрутов движения робота
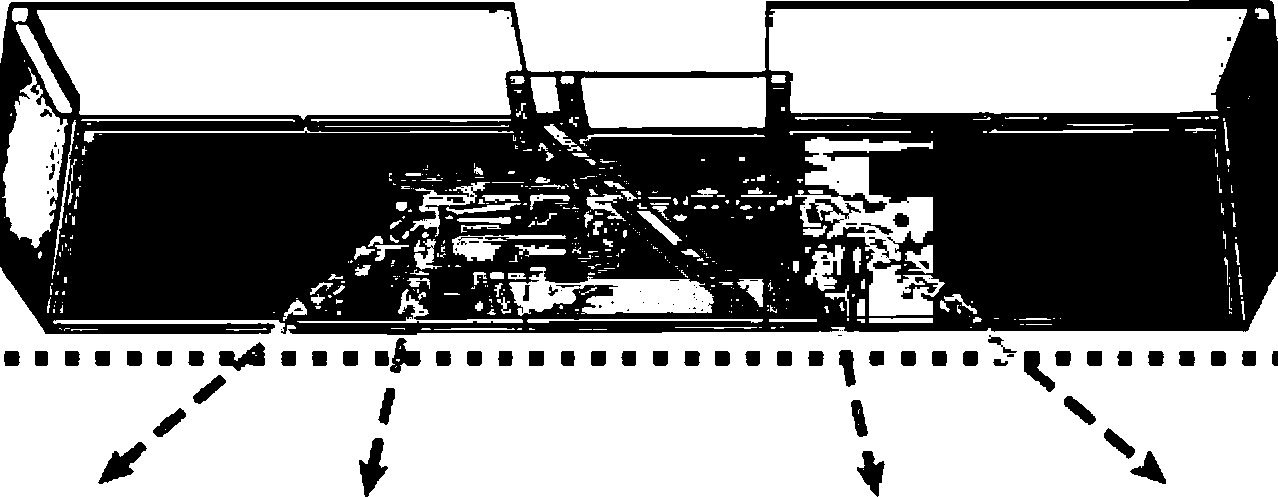
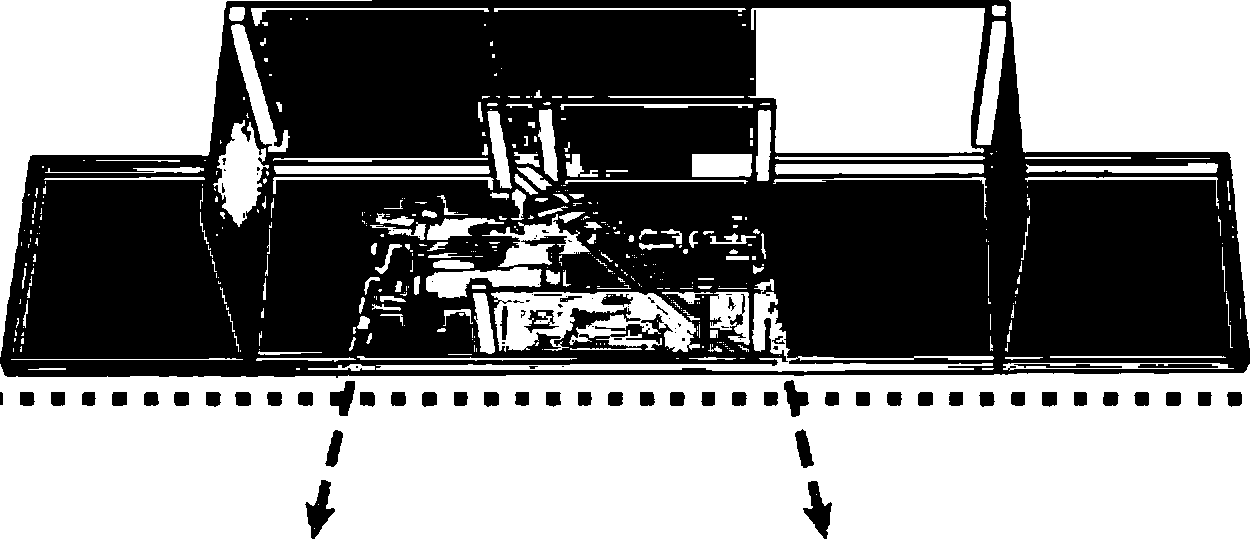
Рисунок 2— Испытательный стенд с открытой, прямоугольной и квадратной зонами въезда/выезда и примерами маршрутов движения робота
4.5 В данном методе испытаний установлены приведенные в 4.5.1, 4.5.2 возможные ошибки при выполнении задания, вызывающие его прекращение.
4.5.1 Любой контакт робота с испытательным стендом, после которого требуется регулировка или ремонт для возврата испытательного стенда в исходное состояние.
4.5.2 Любое визуальное, звуковое или физическое взаимодействия с роботом, которые помогают роботу или удаленному оператору.
4.6 В ходе испытаний должно быть выполнено достаточное число завершенных попыток, чтобы подтвердить надежность робота или навыки удаленного оператора на нужном уровне статистической значимости (см. раздел 9). Испытание, состоящее из 10—30 попыток, должно занять от 10 до 30 мин. При оценке возможностей испытуемого робота следует выделить достаточное количество времени для выполнения надлежащего числа попыток опытным оператором. При оценке квалификации оператора время испытания должно быть ограничено, чтобы опытные операторы смогли выполнить статистически значимое число попыток, а операторы-новички не попадали в ситуацию повышенного стресса и утомляемости. При оценке результатов испытаний необходимо учитывать три показателя, которые следует рассматривать в приведенном порядке по значимости: оценка завершенности, надежность и эффективность. Результаты испытаний в открытой, ограниченной прямоугольной и ограниченной квадратной конфигурации испытательного стенда несопоставимы между собой в силу существенных различий в условиях проведения испытаний.
5 Применение метода испытаний
5.1 Данный метод испытаний является частью комплекса связанных методов испытаний, обеспечивающих воспроизводимые измерения проходимости робототехнического комплекса и профессионализма удаленного оператора. Данный метод испытаний позволяет оценить: проходимость робота; систему подвески, которая должна обеспечивать сцепление с поверхностью перемещения; способность противостоять тенденциям к опрокидыванию из-за изменения положения центра тяжести; остойчивость (при необходимости); вариабельность формы шасси (при наличии данной функции), а также ситуационную осведомленность удаленного оператора. Препятствие в виде бруса разной высоты может быть использовано для имитации таких препятствий, как железнодорожные пути, бордюры и завалы.
5.2 Размеры испытательного стенда можно изменять, чтобы смоделировать разные ограничения, характерные для типичной среды использования робота по назначению. Например, три предусмотренные конфигурации испытательного стенда могут моделировать условия присутствия определенных сложностей для перемещения в среде без препятствий (открытая конфигурация), по территории открытых парковок с наличием промежутков между автомобилями (ограниченная прямоугольная конфигурация), в проходах салонов автобусов, поездов, самолетов или в жилых помещениях с коридорами и дверными проемами (ограниченная квадратная конфигурация).
5.3 Оборудование испытательного стенда является рентабельным и несложным в изготовлении, что позволяет широко его тиражировать. Проведение испытаний согласно установленному методу также не представляет особых трудностей. Это облегчает сравнение результатов испытаний, проведенных в разных местах и в разное время, для определения наиболее совершенных в своем классе роботов и операторов.
5.4 Данный метод испытаний обеспечивает оценку основных возможностей роботов в контролируемых условиях окружающей среды. Включение испытательного стенда с препятствием в виде бруса разной высоты в программы обучения операторов позволяет выполнить оценку снижения способности оператора управлять роботом при неконтролируемых изменениях освещенности, погоды, радиосвязи, точности геопозиционирования и т. д.
5.5 Данный метод испытаний позволяет обосновать принятие решений о закупках роботов и проведение проверки их рабочих характеристик в процессе приемочных испытаний. Таким образом спецификации требований и ожидания пользователей приводят в соответствие с существующими ограничениями возможностей роботов.
5.6 Применение данного метода испытаний обеспечивает возможность осуществления оценки навыков операторов с течением времени, а также сравнения показателей работы операторов, находящихся в разных подразделениях, регионах или в среднем по стране. Метод допускается использовать для обучения операторов в качестве воспроизводимого практического задания или задания, включенного в учебные программы.
5.7 С помощью данного метода испытаний пользователи могут оценить эффективность внедрения технических инноваций, его усовершенствованных возможностей и надежность работы роботов, выполняющих конкретные задачи при соблюдении общей последовательности заданий. Комбинирование нескольких методов испытаний или их последовательное исполнение способствует реализации сочетания возможностей роботов, необходимых для выполнения основных задач.
6 Требования к испытательному оборудованию
6.1 Оборудование испытательного стенда включает настилы, стены (только для ограниченных прямоугольной и квадратной конфигураций), поддоны и препятствия в виде бруса разной высоты (см. рисунок 3). Основным размерным параметром испытательного стенда, который следует учитывать, является ширина прохода на испытательном стенде И/для робота; при этом рекомендуется установить следующие значения для этого параметра: 240 см с допуском ±2,5 см; 120 см с допуском ± 2,5 см; 60 см с допуском ±1,3 см или 30 см с допуском ±1,3 см. Размер, выбранный для параметра И/, должен быть репрезентативным для предполагаемой среды использования робота по назначению или при его выборе следует исходить из размеров робота; можно также применять оба критерия (т. е. робот должен иметь возможность маневрировать на испытательном стенде с выбранными размерами). Все размеры испытательного стенда масштабируют пропорционально И/ (см. рисунки 4 и 5).
Открытая зона въезда/выезда
Сторона В
Сторона А Старт/финиш

Сторона А Старт/финиш
Сторона В
Квадратная зона въезда/выезда
Сторона А Старт/финиш
Рисунок 3— Вид испытательного стенда с помеченными компонентами
В сантиметрах
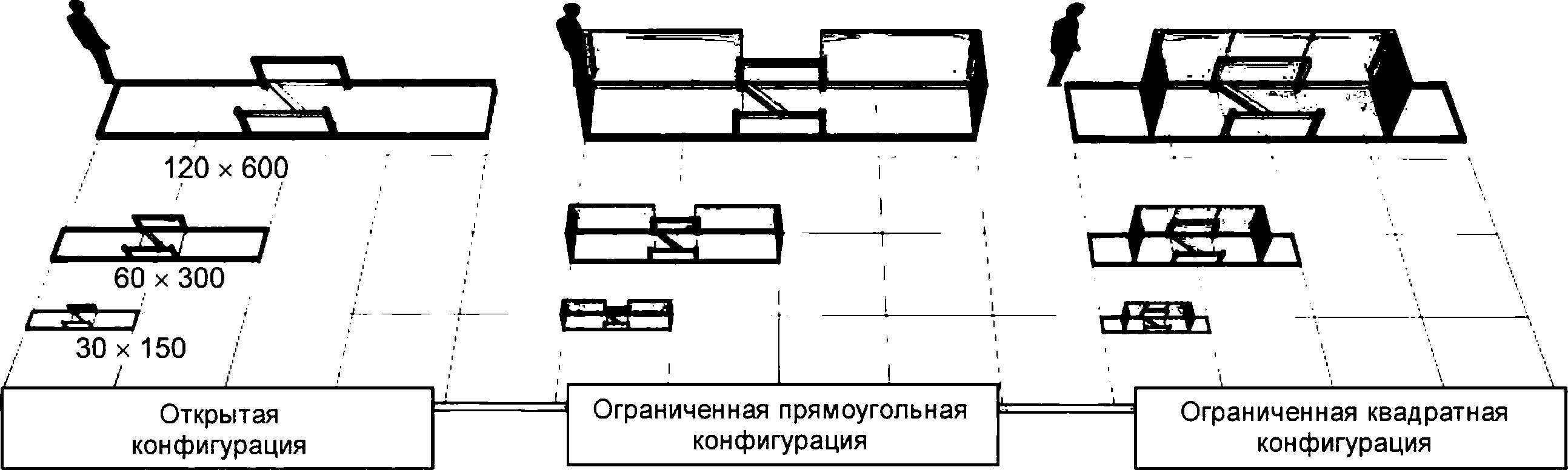
Рисунок 4 — Испытательное оборудование является масштабируемым для моделирования разной внешней среды
Открытая зона въезда/выезда
Сторона В
Сторона А Старт/финиш
Сторона А Старт/финиш

Сторона А Старт/финиш
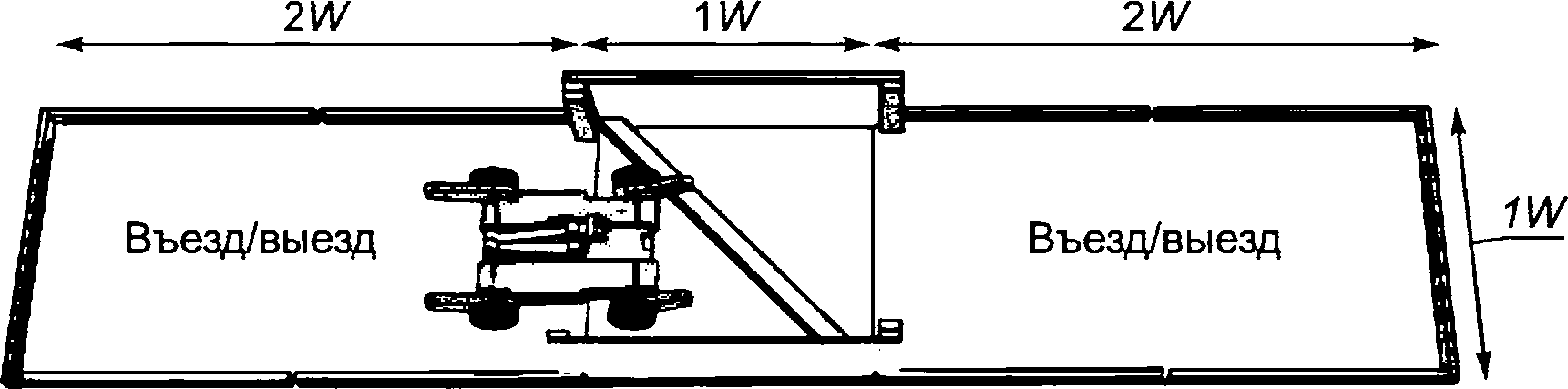
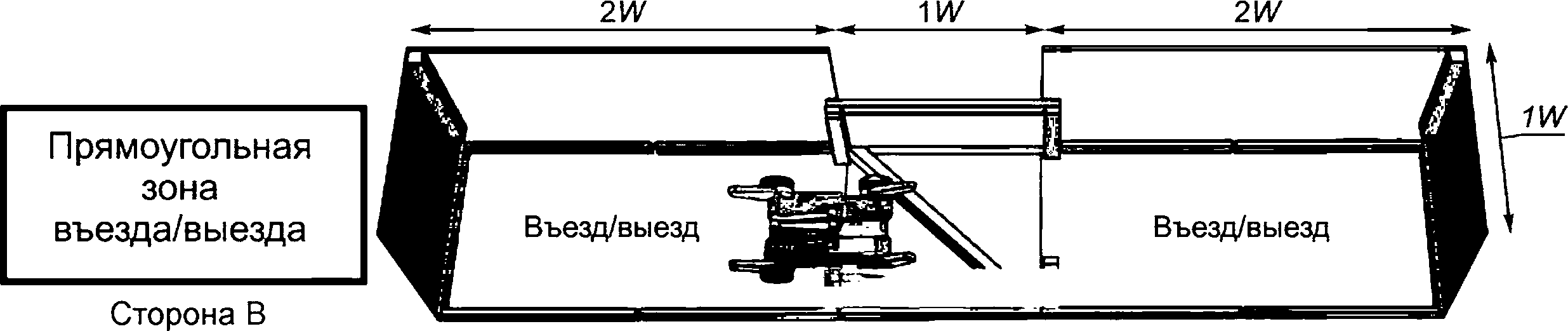
Рисунок 5 — Вид испытательного стенда с указанием размеров и обозначенными зонами въезда/выезда для открытой, ограниченной прямоугольной и ограниченной квадратной конфигураций
Например, ширина препятствия в виде бруса разной высоты составляет 1 И/, длина препятствия в виде бруса разной высоты составляет либо ЗИ/ (ограниченная квадратная конфигурация), либо 5И/ (ограниченная прямоугольная конфигурация и открытая конфигурация). Данные, полученные для каждой минимальной ширины прохода испытательного стенда, не сопоставимы сданными, приведенными для других значений минимальной ширины прохода.
6.2 Испытательный стенд состоит из двух симметричных зон въезда/выезда, которые находятся с обеих сторон от препятствия в виде бруса разной высоты. Предусмотрено три конфигурации испытательного стенда: открытая, ограниченная прямоугольная и ограниченная квадратная (см. рисунок 4). Выбор конфигурации испытательного стенда определяют исходя из условий предполагаемой среды использования робота по назначению. В открытой конфигурации стены в зонах въезда/выезда с обеих сторон от препятствия в виде бруса разной высоты не устанавливают, что обеспечивает беспрепятственное движение робота. В ограниченной прямоугольной конфигурации зоны въезда/выезда имеют размеры 21V х 1И/и ограничены стенами, препятствующими движению робота. Зоны въезда/выезда в ограниченной квадратной конфигурации размерами 1 И/ х 1 И/ также оборудованы стенами, которые препятствуют движению робота. Высота стен должна превышать высоту робота. Данные, полученные в каждой из трех конфигураций испытательного стенда, не сопоставимы с данными для других конфигураций.
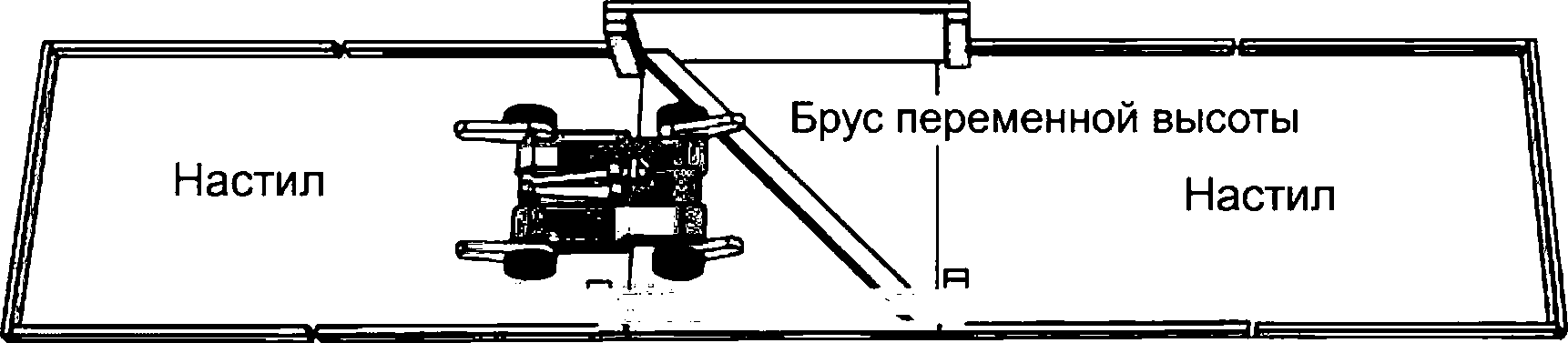
6.3 Брус разной высоты
Данное препятствие состоит из одного или нескольких элементов, выполненных из размерных пиломатериалов, установленных на настиле под углом 45°. Брус располагают в зоне стенда длиной 1И/ (см. рисунок 6). Высота одного элемента зависит от масштаба испытательного стенда (см. таблицу 1). Общую высоту бруса устанавливают, помещая несколько размерных деревянных элементов друг на друга (см. рисунок б). С учетом разницы в размерах деревянных элементов может потребоваться использование дополнительного элемента для обеспечения надлежащей общей высоты диагонального препятствия.
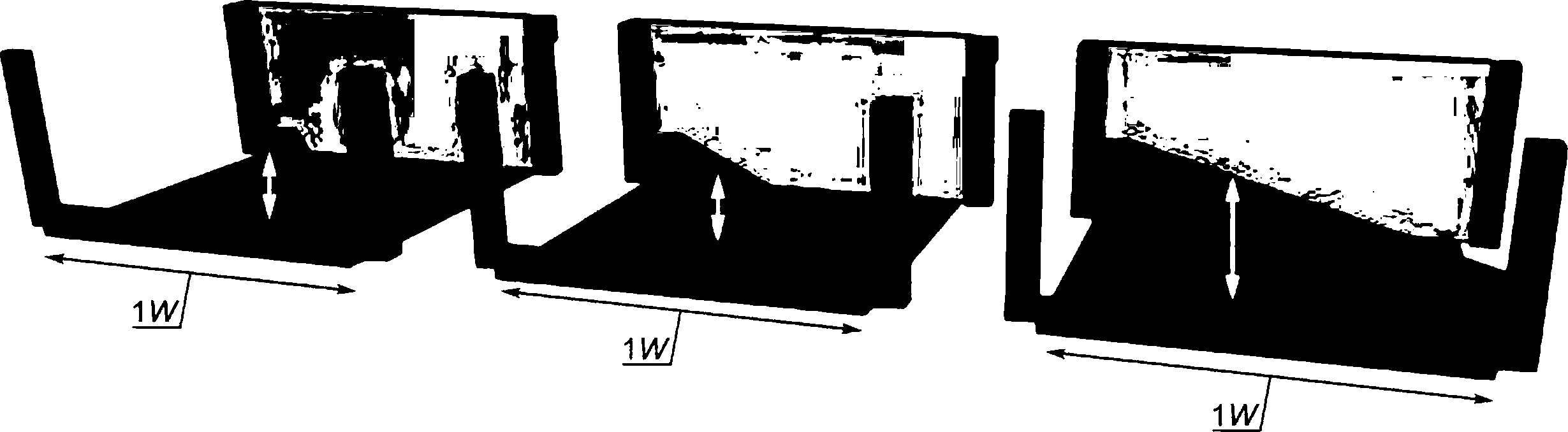
Рисунок 6 — Вид испытательного стенда с брусом разной высоты
Таблица 1 — Высота одного элемента препятствия для разных масштабов испытательного стенда
В сантиметрах
Ширина прохода И/ | Номинальная высота Н одного элемента препятствия |
120 | 10 |
60 | 5 |
30 | 2,5 |
6.4 Настил
Настил изготавливают из ориентированно-стружечных плит (ОСП) или аналогичного материала с бортами из пиломатериалов. Каждый настил имеет размеры 2И/ х 1И/. Зазоры, прорезанные по середине длинной стороны бортов, предназначены для установки ограничивающей стены (см. рисунок 7).
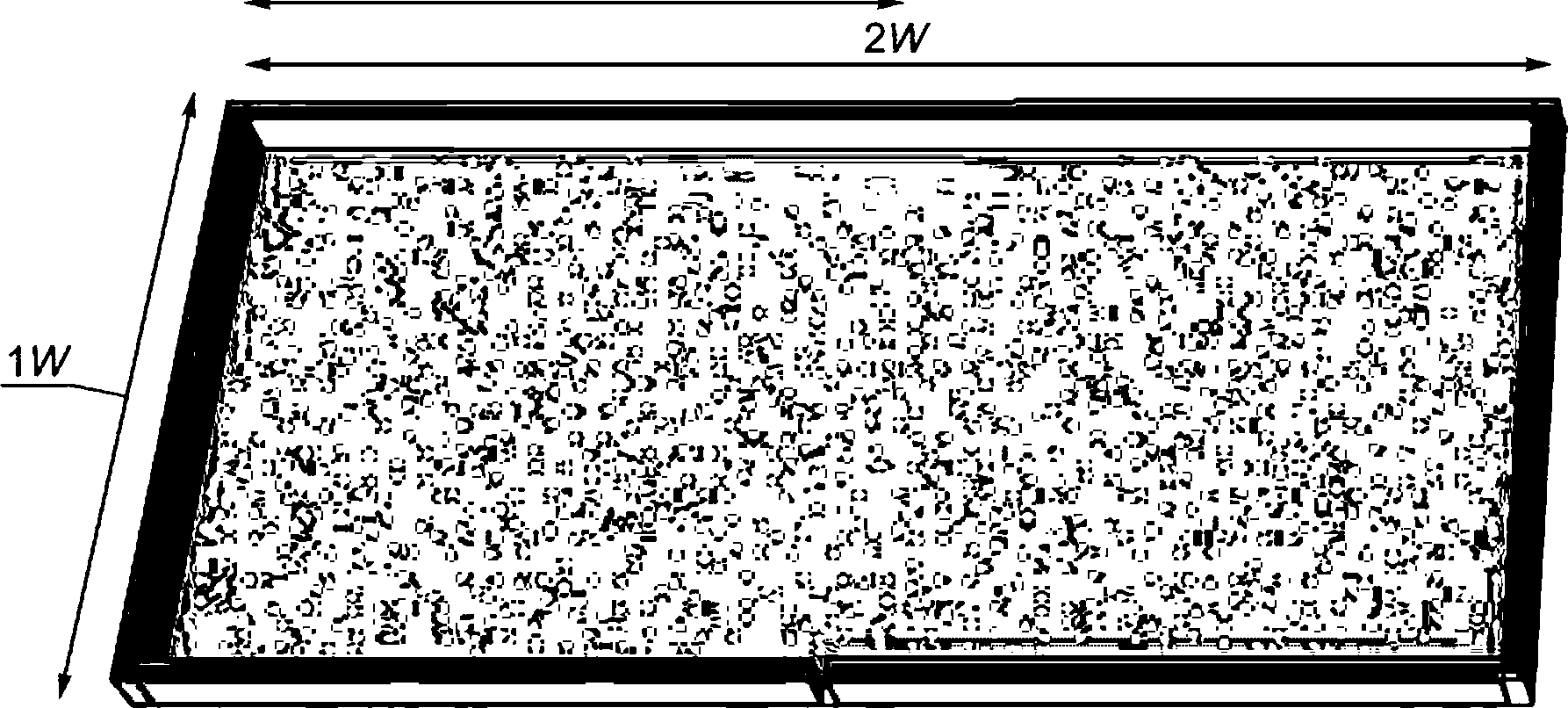
Рисунок 7 — Настил
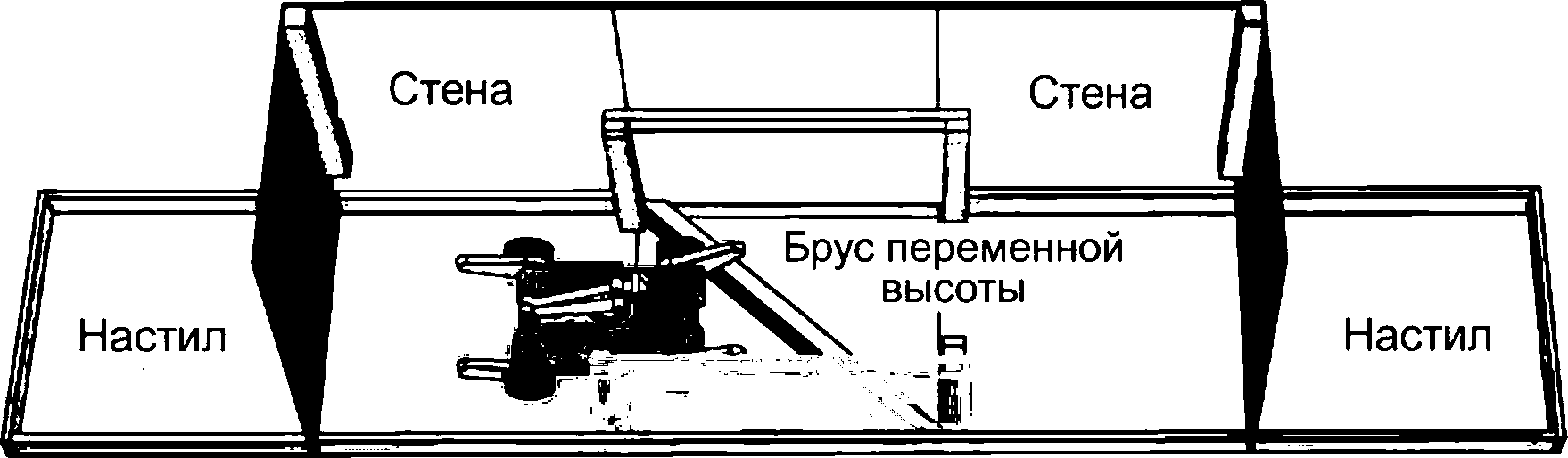
6.5 Стены, ограничивающие движения робота
Стены, используемые в ограниченной прямоугольной и ограниченной квадратной конфигурациях, обеспечивают физический и визуальный ориентиры для оператора, дистанционно управляющего роботом при преодолении бруса разной высоты (см. рисунок 8). Стены могут быть изготовлены из любого твердого материала, а по высоте они должны быть выше наиболее высокой точки робота на протяжении всего испытания. Таким образом, все части робота будут гарантированно оставаться внутри области, ограниченной стенами. Стены должны быть прочными, несложными при проведении ремонта и замены.
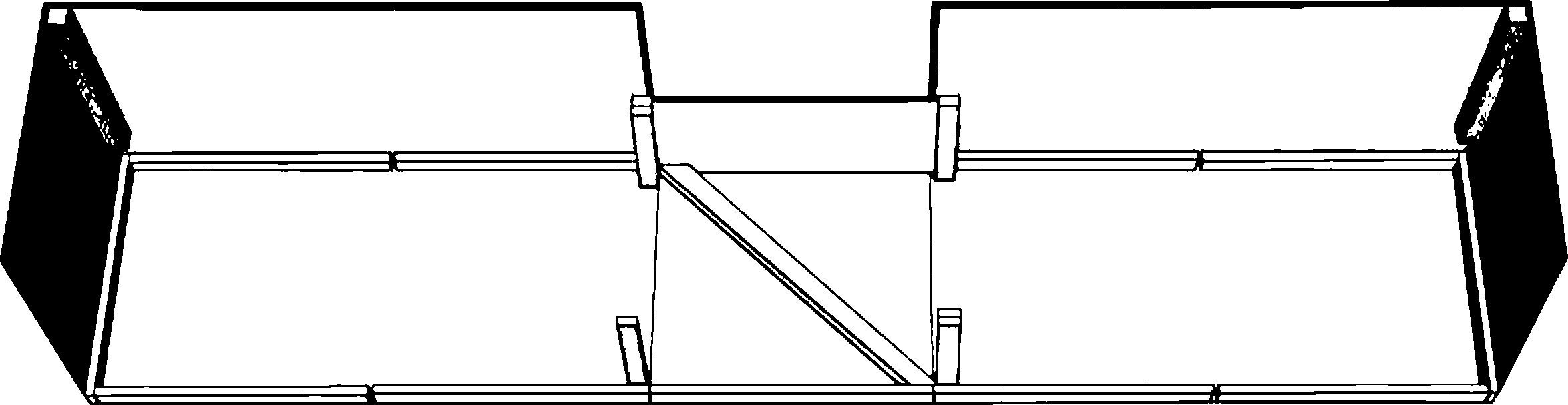
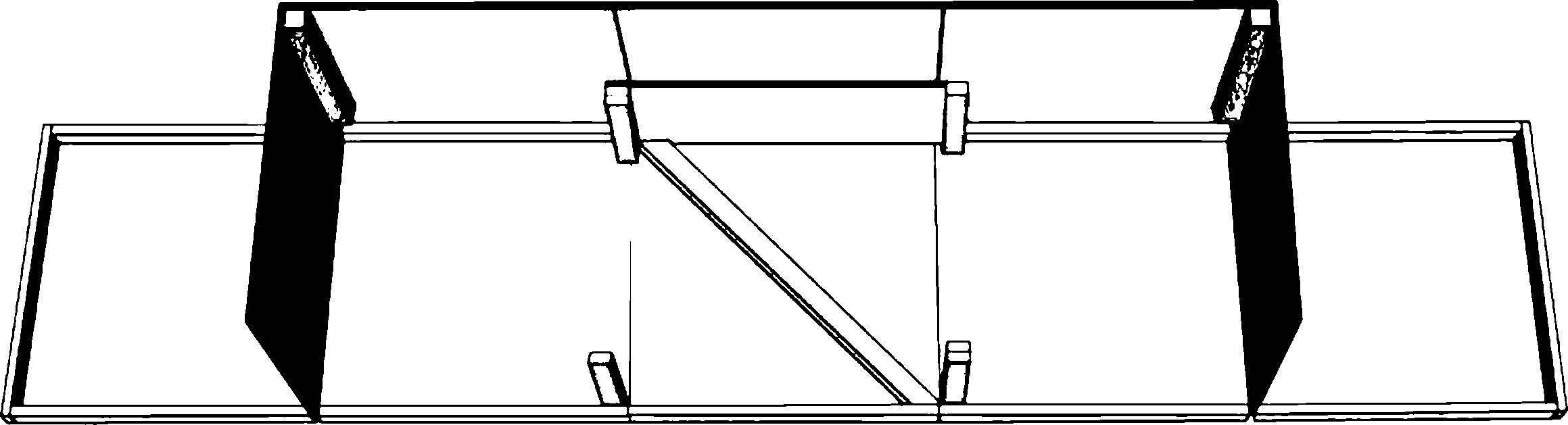
Рисунок 8 — Стены в ограниченной прямоугольной (вверху) и ограниченной квадратной (внизу) конфигурациях
6.6 Размещение испытательного стенда
Данный испытательный стенд может быть установлен внутри помещения, на открытом воздухе или в транспортном контейнере. Следует отметить, что для испытательных стендов шириной прохода 120 см и более внутри транспортного контейнера может быть размещена только ограниченная прямоугольная или ограниченная квадратная конфигурация. Все конфигурации с шириной прохода менее 120 см могут быть установлены внутри транспортного контейнера.
6.7 Другие устройства
Для измерения фактического времени выполнения попытки необходимо использовать хронограф, обеспечивающий точную индикацию моментов времени начала и завершения испытания для минимизации неопределенности. Хронограф может вести прямой или обратный отсчет времени, но должен иметь возможность задавать длительность в минутах. Для измерения длительности испытания допускается использовать секундомер. Для контроля освещенности необходим люксметр. Окружающую среду считают светлой, если освещенность составляет более 150 лк; если освещенность менее 0,1 лк, то окружающую среду считают темной. Для измерения температуры окружающей среды необходим термометр. Используемые средства измерений должны иметь свидетельства об утверждении типа.
7 Требования безопасности
7.1 Для безопасной удаленной или автономной работы робота требуются функциональные системы аварийной остановки. Кнопка аварийной остановки на операторском пульте управления должна быть четко обозначена и легко доступна. Если на корпусе робота предусмотрена кнопка аварийной остановки, то она также должна быть четко обозначена. До начала испытаний все участники должны четко усвоить, где находятся кнопки аварийной остановки.
7.2 Системы аварийной остановки должны функционировать до того, как дистанционно управляемый робот начнет перемещение. Между роботом и оператором должна поддерживаться постоянная связь до тех пор, пока робот не окажется в безопасности внутри испытательного стенда, а пользователи будут находиться либо за пределами испытательного стенда, либо на безопасном расстоянии от робота. Удаленный оператор должен убедиться в том, что никто не работает с роботом перед тем, как начать приводить в действие манипулятор, перемещать робот или приводить его в действие каким-либо другим способом. Не допускается присутствие людей непосредственно перед роботом, позади робота или в пределах досягаемости манипулятора вплоть до полного выключения робота.
7.3 Использовать защитные приспособления, в частности страховочный трос, для предотвращения повреждения робота можно, только находясь на безопасном расстоянии от него. Запрещается подставлять руки, чтобы предотвратить падение или опрокидывание робота. Для этой цели следует использовать страховочные тросы. Любое взаимодействие с роботом, в том числе натягивание страховочного троса для предотвращения падения робота, считают ошибкой, а попытку признают незавершенной.
7.4 Испытательное оборудование, предназначенное для оценки проходимости роботов, может быть сложным и неустойчивым, создавая опасность для пользователей. Для снижения риска участники испытаний должны носить надлежащую обувь и использовать средства индивидуальной защиты. При работе с роботом или переноске оборудования внутри испытательного стенда необходимо быть предельно внимательными и осторожными.
8 Порядок проведения испытаний
8.1 Определение конфигурации робота
Конфигурация испытуемого робота должна быть идентифицирована и иметь уникальное обозначение (например, марку, модель, исполнение), включая все подсистемы и компоненты с их характеристиками и функциональными возможностями. Конфигурация робота должна соответствовать конфигурации, необходимой для использования робота по назначению. Конкретный робот может иметь несколько разных конфигураций. Любые конфигурации конкретного робота могут участвовать в испытаниях, но конкретная конфигурация робота должна оставаться неизменной при выполнении всех попыток, чтобы обеспечить возможность прямого сравнения характеристик и сопоставления преимуществ и недостатков у разных конфигураций данного робота. В общем случае, у испытуемого робота должны оставаться неизменными габариты, масса и расположение центра тяжести, а также его основные подсистемы и компоненты, такие как гусеницы, колеса, ноги, манипулятор, радиосвязь, кабель, операторский пульт управления и т. д. Если конфигурация робота изменяется в процессе испытаний, то данное испытание считают несостоявшимся (например, если оператор после выполнения пяти попыток предлагает снять с робота манипулятор, потому что он мешает управлять роботом, то это признают новой конфигурацией робота, а данное испытание несостоявшимся). К протоколу испытаний должны быть приложены подробные фотографии конкретной конфигурации робота, а также видеозаписи выполнения работ по техническому обслуживанию робота, таких как замена гусеницы, замена батареи и т. д. При необходимости в протокол испытаний включают дополнительную информацию, например представленную в 8.1.1—8.1.4.
8.1.1 Масса и габариты всех контейнеров непосредственно после поставки или готовых к развертыванию робота.
8.1.2 Перечень всех комплектующих изделий, таких как аккумуляторные батареи, зарядные устройства, а также расходных материалов.
8.1.3 Перечень запасных частей, инструментов и принадлежностей, необходимых для технического обслуживания робота.
8.1.4 Дополнительные полезные нагрузки (при их наличии).
Примечание — Дополнительная информация о конфигурации робота приведена в ГОСТ Р 60.6.3.25.
8.2 Подготовка испытательного стенда
Необходимо убедиться в том, что стенд подготовлен к проведению испытаний и обеспечено выполнение заданных условий окружающей среды.
8.2.1 Необходимо выбрать масштаб испытательного стенда с минимальной шириной прохода W таким образом, чтобы стенд соответствовал намеченной среде использования робота по назначению (см. рисунок 4).
8.2.2 Следует определить открытую, ограниченную прямоугольную или ограниченную квадратную конфигурацию испытательного стенда (см. рисунок 1).
8.2.3 Необходимо убедиться в том, что испытательный стенд готов к проведению испытаний, включая установленный диагонально брус, стены и т. д.
8.2.4 Должны быть обеспечены заданные условия окружающей среды, включая уровень освещенности, температуру и т. д.
8.2.5 Следует зарегистрировать и контролировать условия окружающей среды, включая уровень освещенности, температуру и т. д.
8.2.6 Необходимо установить на хронографе намеченную длительность проведения испытания в минутах или сбросить показания секундомера.
8.3 Готовность оператора
Следует убедиться в том, что оператор дистанционного управления роботом готов к проведению испытаний. При этом необходимо выполнить перечисленные ниже действия.
8.3.1 Следует определить число попыток в данном испытании (от 10 до 30), которое обеспечит заданный порог надежности и достоверности полученных результатов.
8.3.2 Необходимо убедиться в том, что оператор понимает, какую ориентацию робота следует использовать при его перемещении, т. е. произвольную или передним/задним ходом.
8.3.3 Оператор должен понимать, что попытка будет считаться завершенной, если робот выполнит нижеприведенную последовательность действий.
8.3.3.1 Робот начинает движение со стороны А испытательного стенда.
8.3.3.2 Робот перемещается на сторону В.
8.3.3.3 Робот преодолевает диагонально расположенный брус установленной высоты и доезжает до противоположного конца стенда.
8.3.3.4 Робот возвращается на сторону А. Попытку считают завершенной, если робот возвратился на сторону А (шаг 4) испытательного стенда, без ошибок (см. рисунок 1).
8.3.4 Оператор должен понимать, что после того, как робот полностью окажется на стороне А, он должен снова переехать на сторону В, чтобы выполнить следующую попытку в противоположном направлении.
8.3.5 Необходимо убедиться в том, что оператор понимает, как он должен действовать в случае отказа робота или возникновения паузы подругой причине (см. 8.5 и 8.6).
8.3.6 При необходимости следует предоставить оператору возможность потренироваться на испытательном стенде, непосредственно наблюдая за роботом или дистанционно, а также убедиться в том, что оператор в полной мере ознакомлен с порядком проведения испытаний перед их началом.
8.3.7 Оператор должен занять свое рабочее место, расположенное удаленно от испытательного стенда. Оператор не должен иметь прямого визуального или звукового контакта с находящимся на испытательном стенде роботом. Необходимо обеспечить связь оператора с роботом по радиоканалу либо с помощью кабеля. Если оператор не имеет возможности видеть робота, но в то же время находится в непосредственной близости от стенда, он должен надеть наушники или беруши, которые обычно используют для защиты слуха.
8.4 Проведение испытания
После того, как испытательный стенд будет подготовлен, а оператор готов к работе, следует соблюдать нижеприведенную последовательность действий.
8.4.1 Должны быть зарегистрированы конфигурация и масштаб испытательного стенда, а также ориентация перемещения робота.
8.4.2 Далее следует начать движение робота на стороне А с обозначенной точки старта.
8.4.3 Затем необходимо запустить хронограф в тот момент, когда какая-либо часть робота окажется на стороне В.
8.4.4 После того, как робот, безошибочно преодолев брус, всем своим корпусом переедет на сторону А на противоположном конце стенда, следует зарегистрировать завершенную попытку.
8.4.5 Также необходимо зарегистрировать незавершенную попытку, если робот нанесет испытательному стенду повреждение, требующее регулировки или ремонта для выполнения следующей попытки (см. 8.5).
8.4.6 Следует повторять выполнение попыток до тех пор, пока не будет завершено заданное количество попыток.
8.4.7 Должны быть зафиксированы число завершенных и незавершенных попыток и продолжительность всего испытания.
8.4.8 Следует также рассчитать показатели завершенности, надежности и эффективности (см. раздел 9).
8.5 Порядок действий при незавершенной попытке
Если робот застрял либо вышел из строя, а для продолжения испытаний необходимо визуальное или физическое вмешательство человека или если робот повредил испытательный стенд так, что после этого потребовалась регулировка или ремонт стенда, то следует соблюдать нижеприведенную последовательность действий.
8.5.1 Необходимо остановить хронограф.
8.5.2 Далее следует зафиксировать время, место, направление движения робота (при движении передним/задним ходом) и кратко описать случившееся.
8.5.3 Затем должна быть зарегистрирована ошибка при выполнении данной попытки.
8.5.4 Следует убедиться в том, что робот может продолжить испытания, либо выполнить надлежащее техническое обслуживание робота.
8.5.5 Необходимо удостовериться в том, что испытательный стенд не поврежден в результате инцидента, либо произвести ремонтные работы для его восстановления.
8.5.6 Оператор должен получить команду о возвращении робота на сторону А.
8.5.7 Следует перезапустить хронограф, как только робот полностью окажется на стороне А, и приступить к выполнению следующей попытки.
8.5.8 Испытание должно быть продолжено до завершения заданного числа попыток или до тех пор, пока не истечет время, установленное для выполнения испытания.
8.6 Остановка испытания
Если испытание требуется приостановить по любой причине, кроме неисправности или ошибки робота, то необходимо выполнить действия по нижеприведенной последовательности.
8.6.1 Следует остановить хронограф.
8.6.2 Должны быть зафиксированы время и место, а также кратко описано произошедшее (при необходимости).
8.6.3 Если причиной остановки стала неисправность испытательного стенда, то необходимо провести надлежащий ремонт. Следует убедиться в том, что робот может продолжить испытания, либо выполнить надлежащее техническое обслуживание робота, если он поврежден из-за неисправности испытательного стенда.
8.6.4 Необходимо перезапустить хронограф, когда робот будет готов продолжить испытание.
8.6.5 Далее следует дать оператору команду о продолжении движения робота по маршруту.
8.6.6 Необходимо продолжать испытание до завершения заданного количества попыток или до тех пор, пока не истечет время, установленное для выполнения испытания.
8.7 Программный сброс
Любая ручная или автоматическая перезагрузка программного обеспечения операторского пульта управления или робота.
9 Подсчет и интерпретация результатов
9.1 За время проведения испытаний должно быть выполнено достаточное количество завершенных попыток для того, чтобы продемонстрировать надежность возможностей робота или профессионализм оператора дистанционного управления. При расчете результатов испытаний необходимо учитывать три показателя, представленные в порядке важности.
9.2 Первый показатель — оценка завершенности испытаний. Выполнение статистически значимого числа попыток имеет большое значение для оценки надежности выполнения задания. В зависимости от сложности задания и времени, отведенного на проведение испытаний, следует осуществить от 10 до 30 попыток. Выполнение заданного числа попыток без ошибок является основным показателем при оценке результатов испытаний, после достижения которого можно переходить к оценке двух других показателей.
9.3 Второй показатель — надежность выполнения задания. Если осуществлено статистически значимое числе попыток, то отношение числа завершенных попыток к общему числу выполненных попыток является оценкой надежности выполнения задания, рассчитываемой по следующей формуле:
(число завершенных попыток/общее число попыток) • 100 = надежность, %. (1)
Заказчик испытаний может установить необходимые пороговые значения надежности выполнения задания: для одних заданий может требоваться более высокая надежность, а для других — требования по надежности могут быть менее жесткими. Например, чтобы продемонстрировать не менее 80 % надежности (при достоверности не ниже 80 %), результаты испытаний должны соответствовать нижеприведенным.
9.3.1 Первые 10 попыток без ошибок (достоверность 86 % при надежности не менее 80 %).
9.3.2 20 попыток при не более чем одной незавершенной попытке (достоверность 91 % при надежности не менее 80 %).
9.3.3 30 попыток при не более чем трех незавершенных попытках (достоверность 85 % при надежности не менее 80 %).
9.3.4 Если проводят несколько испытаний, то при определении отношения завершенных попыток к числу предпринятых попыток следует учитывать последние 30 последовательных попыток в каждом из испытаний. В этом случае можно будет избежать ошибок или неудач с последующим набором завершенных попыток. Для определения других уровней надежности (и достоверности) следует использовать биномиальные таблицы вероятности и вычислительные средства.
9.4 Третий показатель — эффективность. Эффективность завершенного испытания рассчитывают с целью определения незначительных различий между возможностями роботов или квалификациями операторов дистанционного управления. Показателем эффективности является среднее число завершенных попыток, выполненных за отведенное время. Эффективность рассчитывают по формуле
(число завершенных попыток/время в минутах) = число попыток в минуту. (2)
10 Требования к отчетности
10.1 Используя записи результатов испытаний, можно проводить сравнения во времени для данного робота и оператора, для разных конфигураций роботов или для разных роботов в разных местах. Однако результаты испытаний, полученные на открытой, ограниченной прямоугольной и ограниченной квадратной конфигурациях испытательного стенда недопустимо сравнивать между собой, т. к. они представляют разные уровни сложности для различных способов передвижения роботов. Также не сравнивают результаты, полученные на испытательных стендах с разной шириной прохода И/. Они представляют разные уровни сложности для роботов, различающихся своими размерами. Рекомендуемая форма протокола испытаний для данного метода испытаний приведена в приложении ДА. В протоколе испытания рекомендуется указывать перечисленную ниже информацию.
10.1.1 Наименование метода испытаний — «Преодоление бруса разной высоты».
10.1.2 Обозначение настоящего стандарта: ГОСТР 60.6.3.28.
10.1.3 Дата проведения испытаний.
10.1.4 Наименование организации или полигона, где проводят испытания.
10.1.5 Населенный пункт, район, область, где проводят испытания.
10.1.6 Фамилия и инициалы руководителя испытаний, должность и организация, которую он представляет.
10.1.7 Изготовитель робота.
10.1.8 Модель робота.
10.1.9 Цифровой или буквенно-цифровой код, обозначающий конфигурацию робота, включая тип связи (беспроводная или кабельная).
10.1.10 Фамилия и инициалы оператора, управляющего роботом, наименование организации, которую он представляет.
10.1.11 Параметры испытательного стенда
10.1.11.1 Масштаб (минимальная ширина прохода).
10.1.11.2 Конфигурация (открытая, ограниченная прямоугольная или ограниченная квадратная).
10.1.11.3 Высота бруса.
10.1.12 Ориентация при движении
10.1.12.1 Произвольная.
10.1.12.2 Передним/задним ходом.
10.1.13 Условия внешней среды
10.1.13.1 Уровень освещенности.
10.1.13.2 Температура.
10.1.13.3 Влажность.
10.1.13.4 Другие применимые условия.
10.1.14 Результаты, полученные от оператора (во время испытаний) или видеофайлы (после испытаний).
10.1.15 Общее время проведения испытаний.
10.1.16 Причина остановки испытаний
10.1.16.1 Ошибка робота: робот застрял или вышел из строя, и для продолжения испытаний требуется какое-либо визуальное или физическое вмешательство.
10.1.16.2 Программный сброс: перезагрузка программного обеспечения операторского пульта управления или робота.
10.1.16.3 Пауза в испытаниях: испытания приостановлены, но не из-за ошибки робота.
10.1.17 Результаты
10.1.17.1 Результаты, полученные от оператора во время испытаний.
10.1.17.2 Результаты в виде видеофайлов, полученные после завершения испытаний с помощью видеофиксации.
10.1.17.3 Оценка завершенности: общее количество завершенных попыток.
10.1.17.4 Надежность выполнения задания: отношение количества завершенных попыток к общему количеству выполненных попыток.
10.1.17.5 Эффективность: отношение числа завершенных попыток к времени проведения испытаний.
10.1.18 Число выполненных попыток.
10.1.19 Примечания (любые наблюдения и отмеченные отклонения при проведении испытаний).
11 Погрешность метода испытаний
Результатом испытаний по данному методу является не содержащий количественных показателей отчет о достижении или недостижении заданных пользователем значений надежности выполнения задания. Испытательный стенд обеспечивает четкую фиксацию завершенной/незавершенной попытки, поэтому субъективность человеческой оценки результатов не имеет существенного значения. Поскольку результаты испытаний не являются количественными, то невозможно сделать вывод о том, насколько точные результаты гарантирует данный метод испытаний.
Приложение ДА (рекомендуемое)
Форма протокола испытаний
Протокол испытаний Проходимость. Преодоление бруса разной высоты (по ГОСТР 60.6.3.28) | |
Дата: | Изготовитель робота: |
Место: | Модель робота: |
Адрес: | Конфигурация робота: |
Руководитель: | Оператор/Организация: |
Испытательный стенд
Причина остановки
И/=0,6м И/= 1,2 м
И/=2,4 м
Конфигурация Открытая Прямоугольная Квадратная
__ Высота бруса
Внешняя среда
0 Освещенная (>150 лк)
0 Темная (<0,1 лк)
___Температура, °C
___Влажность, %
Ошибка робота
Ориентация перемещения
И Произвольная
И Передним/задним ходом
Пауза в испытаниях
Программный сброс (ОПУ или робота)
Длительность | ||
5 мин | 10 мин | |
мин | ||
Обвести кружком или указать время, округлив до минут | ||
Обозначения: | л/ Завершенная | О Пауза в X Ошибка | П Программный |
попытка | испытаниях | сброс |
Попытки
(Отметьте время регистрации ошибки или паузы)
21 _
Результаты
~ (Обвести _
ОпеРат°Р 'нужное) Видео
Всего завершенных попыток
Оценка завершенности
0
0
0
0
0
0
0
0
22
23
24
25
26
27
28
29
30
из
Надежность
(завершенных попыток / всего попыток) • 100
Эффекты вность
завершенных попыток / всего минут
Оценка
Примечания:
Приложение ДБ (справочное)
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте
Таблица ДА.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного стандарта |
ГОСТ Р 60.6.3.1—2019 | MOD | ASTM Е2521—16 «Стандартная терминология для оценки возможностей роботов для работы в экстремальных условиях» |
ГОСТ Р 60.6.3.25—2023 | MOD | ASTM Е2592—16 «Общепринятая практика оценки возможностей роботов для работы в экстремальных условиях. Логистика. Упаковка оперативного запаса оборудования городских поисковоспасательных подразделений» |
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - MOD — модифицированные стандарты. | ||
УДК 621.865.8:007.52:006.86:006.354
ОКС 25.040.30
13.200
Ключевые слова: роботы, робототехнические устройства, роботы для работы в экстремальных условиях, методы испытаний, проходимость, брус разной высоты, порядок проведения испытаний, испытательное оборудование
Редактор Л. С. Зимилова Технический редактор И.Е. Черепкова Корректор М.В. Бучная Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 25.09.2023. Подписано в печать 27.09.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 2,79. Уч.-изд. л. 2,51.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}