ГОСТ Р 60.3.0.1-2017/ИСО 11593:1996
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ПРОМЫШЛЕННЫЕ МАНИПУЛЯЦИОННЫЕ РОБОТЫ
Системы автоматической смены рабочего органа. Термины, определения и представление характеристик
Robots and robotic devices. Industrial manipulating robots. Automatic end effector exchange systems. Terms, definitions and presentation of characteristics
ОКС 25.040.30
Дата введения 2018-07-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 14 ноября 2017 г. N 1743-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 11593:1996* "Промышленные манипуляционные роботы. Системы автоматической смены рабочего органа. Термины, определения и представление характеристик" (ISO 11593:1996 "Manipulating industrial robots - Automatic end effector exchange systems - Vocabulary and presentation of characteristics", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5)
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Сентябрь 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляци-онным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на промышленные манипуляционные роботы. Настоящий стандарт идентичен ИСО 11593:1996, разработанному подкомитетом (SC) 2 "Роботы и робототехнические устройства" Технического комитета (TC) 184 ИСО "Системы автоматизации производства и их интеграция".
Примечание - С 1 января 2016 года ISO/TC 184/SC 2 "Роботы и робототехнические устройства" преобразован в ISO/TC 299 "Робототехника".
Системы автоматической смены рабочего органа имеют большое значение для манипуляционных роботов. В настоящем стандарте представлены используемые термины, их определения, а также технические характеристики систем автоматической смены рабочего органа, такие как силы, моменты, время смены рабочего органа. Настоящий стандарт не содержит сведений о разработке и конструкции данных систем.
1 Область применения
Настоящий стандарт определяет термины, относящиеся к системам автоматической смены рабочего органа, используемым в промышленных манипуляционных роботах, работающих в производственной среде.
Термины представлены своими символами, единицами измерения, определениями и описаниями. Определения включают в себя применимые ссылки на существующие стандарты.
В приложении А приведен формат представления характеристик систем автоматической смены рабочего органа.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 8373:1994, Manipulating industrial robots - Vocabulary (Промышленные манипуляционные роботы. Термины и определения)
___________________
Заменен на ISO 8373:2012.
ISO 9409-1:1996, Manipulating industrial robots - Mechanical interfaces - Part 1: Plates (Промышленные манипуляционные роботы. Механические интерфейсы. Часть 1. Круглые фланцы)
___________________
Заменен на ISO 9409-1:2004.
ISO 9409-2:1996, Manipulating industrial robots - Mechanical interfaces - Part 2: Shafts (Промышленные манипуляционные роботы. Механические интерфейсы. Часть 2. Стержни)
___________________
Заменен на ISO 9409-2:2002.
ISO 9787:1990, Manipulating industrial robots - Coordinate systems and motion nomenclatures (Промышленные манипуляционные роботы. Системы координат и типы перемещений)
___________________
Заменен на ISO 9787:2013.
3 Термины и определения
В настоящем стандарте применены термины по ИСО 8373. Другие термины, их обозначения, единицы измерения, определения и описания приведены в таблице 1.
Таблица 1 - Термины, обозначения, единицы измерения, определения и описания
Подраздел и пункт | Термин | Обозна- | Единица измерения | Определение и описание |
3.1 Внешняя форма и основные размеры системы смены рабочего органа | ||||
| ||||
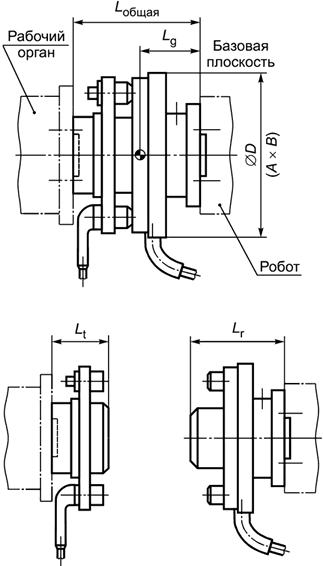
3.1.1 | конструктивная форма (structural shape) | Габаритные размеры устройства: | ||
мм | - внешний диаметр (для круглой формы); | |||
мм | - ширина (для других форм); | |||
мм | - глубина (для других форм); | |||
мм | - длина узла стыковки робота; | |||
мм | - длина узла стыковки рабочего органа. | |||
3.1.2 | расстояние между интерфейсами (face-to-face dimension) | Расстояние между интерфейсами крепления узлов стыковки робота и рабочего органа: | ||
| мм | - длина состыкованных узлов стыковки; | ||
| мм | - расстояние между интерфейсом крепления узла стыковки робота и плоскостью стыковки; | ||
| мм | - расстояние между интерфейсом крепления узла стыковки рабочего органа и плоскостью стыковки. | ||
3.1.3 | центр тяжести состыкованной системы узлов стыковки (centre of gravity in the coupled system) | мм | Расстояние от базовой плоскости интерфейса робота до центра тяжести состыкованной системы узлов стыковки. | |
3.1.4 | момент инерции состыкованной системы узлов стыковки (moment of inertia of the coupled system) | кг·м | Момент инерции состыкованной системы узлов стыковки, измеренный относительно продольной оси | |
3.1.5 | масса (mass) | кг | Масса узла стыковки робота. | |
кг | Масса узла стыковки рабочего органа. | |||
3.1.6 | интерфейс со стороны робота и со стороны рабочего органа (interface for robot side and tool side) | Описание и маркировка узлов сопряжения робота и рабочего органа по ИСО 9409-1 и ИСО 9409-2. | ||
3.1.7 | кабельная трасса (cable routing) | Расположение и размеры трассы прокладки кабеля на узлах сопряжения робота и рабочего органа, показанные на одном чертеже. | ||
3.2 Позиционирование и ориентация при стыковке | ||||
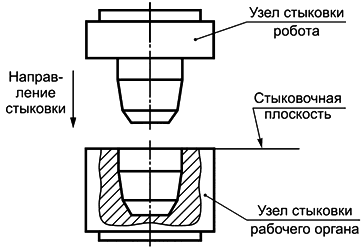
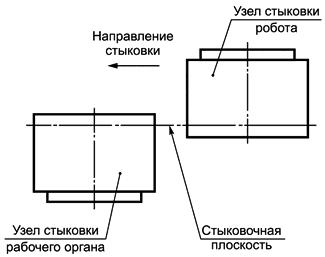
3.2.1 | направление стыковки (coupling direction) | Направление, в котором установленный на роботе узел стыковки и/или установленный на рабочем органе узел стыковки движутся друг к другу. | ||
| ||||
При поперечном направлении стыковки движение происходит параллельно стыковочной плоскости. | ||||
| ||||
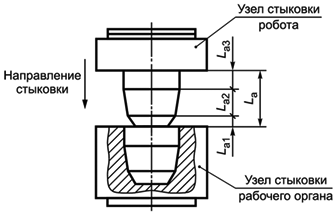
3.2.2 | длина дистанции стыковки (length of the approach distance) | мм | Длина дистанции стыковки показывает общее расстояние перемещения узла стыковки робота (и/или узла стыковки рабочего органа) в направлении стыковки до полной стыковки обоих узлов. | |
мм | - расстояние перемещения до центровки; | |||
мм | - расстояние перемещения при центровке; | |||
мм | - расстояние перемещения после центровки до полной стыковки. | |||
| ||||
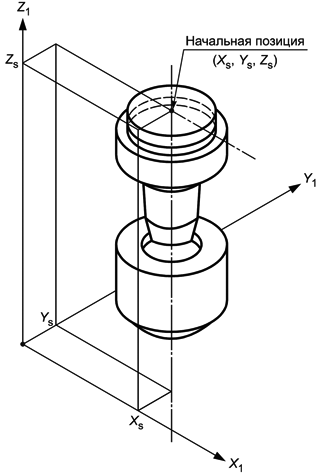
3.2.3 | начальная позиция (start position) | мм | Начальная позиция определяется положением закрепленного на роботе узла стыковки относительно закрепленного на рабочем органе узла стыковки непосредственно перед началом процесса сопряжения. Если начальная позиция соответствует стандартному виду компоновки, то она может быть определена в декартовой системе координат робота | |
мм | ||||
мм | ||||
Пример для осевого направления стыковки: | ||||
| ||||
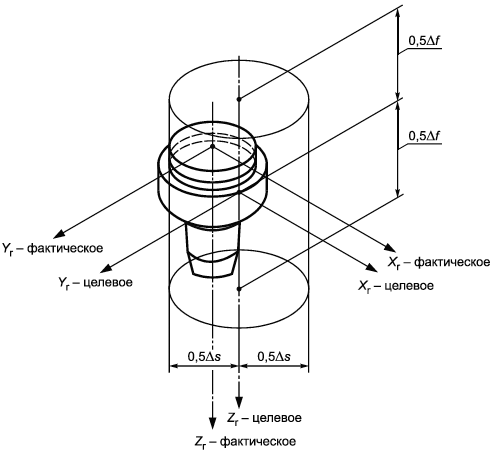
3.2.4 | допуск на положение в начальной позиции (position tolerance in the start position) | мм | Для обеспечения стыковки узлы стыковки робота и рабочего органа должны находиться в начальной позиции с определенной точностью. Поле допуска на положение в начальной позиции представляет собой цилиндрическую область. | |
Заданная начальная позиция представляет собой центр данной цилиндрической области, которая определяется высотой | ||||
| ||||
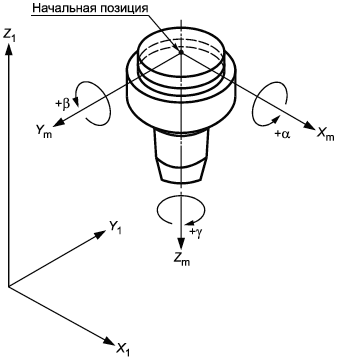
3.2.5 | допуск на ориентацию в начальной позиции (orientation tolerance in the start position): | Допуск на ориентацию должен быть зафиксирован с высокой точностью. Все значения, касающиеся допуска на ориентацию, устанавливают в системе координат механического интерфейса | ||
| ||||
Примечание - Допуск на ориентацию определяется двумя значениями "предельной угловой погрешностью расположения по тангажу/рысканию" и "предельной угловой погрешностью расположения по крену" | ||||
3.2.6 | предельная угловая погрешность расположения по тангажу/рысканию (limit value of the misalignment): | ±0,5 | радиан или градус | Пределы отклонения фактического положения от заданного положения относительно осей |
3.2.7 | предельная угловая погрешность расположения по крену (limit value of the distortion) | ±0,5 | радиан или градус | Отклонение фактического положения от установленного положения относительно оси |
3.2.8 | допуск траектории стыковки (tolerance of the coupling path) | Отклонение траектории стыковки должно находиться в пределах установленного допуска на положение в начальной позиции. | ||
3.2.9 | повторяемость стыковки (coupling repeatability) | Повторяемость стыковки определяет предельное допустимое отклонение взаимного положения узла стыковки робота и узла стыковки рабочего органа при многочисленных операциях стыковки. Базовой точкой является центр интерфейса на узле стыковки робота (согласно ИСО 9409-1 и ИСО 9409-2) в системе координат механического интерфейса | ||
мм | - в поперечном направлении ( | |||
мм | - в осевом направлении ( | |||
| радиан или градус | - по тангажу/рысканию ( | ||
радиан или градус | - по крену ( | |||
| ||||
Условные обозначения: | ||||
3.3 Усилия стыковки и расстыковки | ||||
3.3.1 | усилие стыковки (coupling force) | Н | Сила, которая должна быть приложена роботом для того, чтобы состыковать узел стыковки робота с узлом стыковки рабочего органа. Предполагается, что во время этого процесса узел стыковки рабочего органа удерживается в магазине инструментов. | |
3.3.2 | усилие расстыковки (releasing force) | Н | Сила, которая должна быть приложена роботом для того, чтобы отсоединить узел стыковки робота от узла стыковки рабочего органа. Предполагается, что во время этого процесса узел стыковки рабочего органа удерживается в магазине инструментов. | |
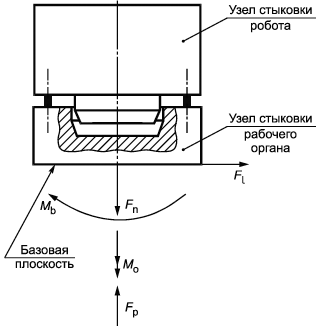
3.4 Нагрузочные характеристики | ||||
Примечание - Все допустимые максимальные значения нагрузочных характеристик соответствуют сумме статических и динамических нагрузок. Все нагрузочные характеристики установлены для базовой плоскости. | ||||
3.4.1 | базовая плоскость (reference plane) | Базовой плоскостью называется монтажная поверхность на узле стыковки рабочего органа, отвечающая требованиям ИСО 9409-1 и ИСО 9409-2. | ||
| ||||
3.4.2 | максимальный изгибающий момент (maximum bending moment) |
| Н·м | Допустимый изгибающий момент при приложении только изгибающей нагрузки. |
3.4.3 | максимальный скручивающий момент (maximum torsional moment) |
| Н·м | Допустимый скручивающий момент при приложении только скручивающей нагрузки. |
3.4.4 | максимальная сила растяжения (maximum tensile force) |
| Н | Допустимая сила растяжения при приложении только растягивающей нагрузки. |
3.4.5 | максимальная сила сжатия (maximum compressive force) |
| Н | Допустимая сила сжатия при приложении только сжимающей нагрузки. |
3.4.6 | максимальная поперечная сила (maximum lateral force) | Н | Допустимая поперечная сила при приложении только поперечной нагрузки. | |
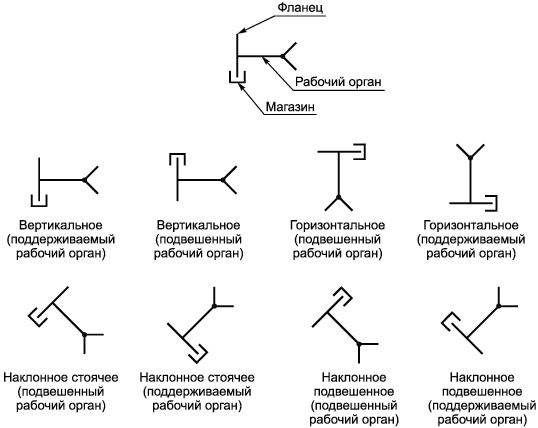
3.5 Интерфейс крепления узла стыковки рабочего органа в магазинном устройстве | ||||
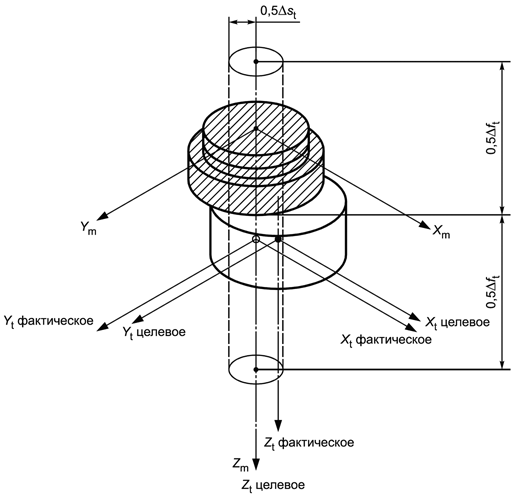
Примечания 1 Следует использовать рабочие характеристики, аналогичные определенным в 3.2. Установленная система координат не изменяется, даже если направление установки в магазин отличается от направления стыковки при смене рабочего органа. | ||||
3.5.1 | ориентация интерфейса в магазине (interface orientation in the magazine) | На приведенных ниже рисунках показаны разные конструктивные варианты ориентации интерфейса в магазине. | ||
| ||||
3.5.2 | допуск на положение и ориентацию перед установкой в магазин (pose tolerance ahead of drive-in) | Допуск на положение и ориентацию, измеренный в центральной точке рабочего органа в начале установки в магазин. Данное положение должно быть определено поставщиком (например, с помощью чертежа). | ||
3.5.3 | сила установки (lay-off force) | Н | Сила, необходимая для установки рабочего органа в магазин. | |
3.5.4 | момент установки (lay-off moment) | Н·м | Момент, необходимый для установки рабочего органа в магазин. | |
3.5.5 | сила извлечения (removal force) | Н | Сила, необходимая для извлечения рабочего органа из магазина. | |
3.5.6 | момент извлечения (removal moment) | Н·м | Момент, необходимый для извлечения рабочего органа из магазина. | |
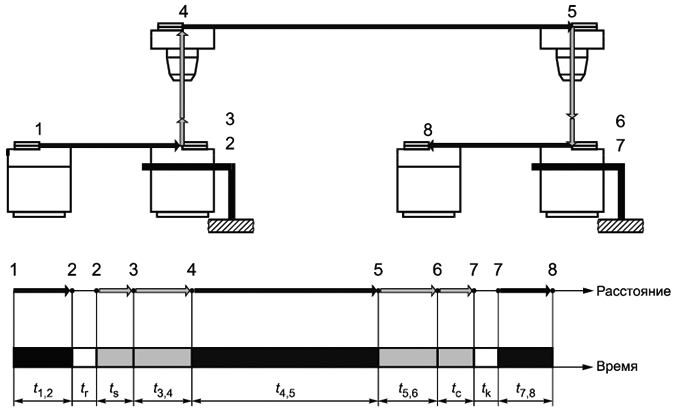
3.6 Время смены рабочего органа | ||||
3.6.1 | время смены рабочего органа (tool exchange time) |
| с | Время смены рабочего органа определяют в результате выполнения всех отдельных движений, необходимых для выполнения описанной ниже операции смены рабочего органа. Время смены рабочего органа применимо только для конкретного периферийного оборудования и конкретного цикла смены рабочего органа. |
| ||||
Примечания | ||||
3.6.2 | время установки (drive-in time) | с | Время установки закрепленного на роботе узла стыковки, соединенного с закрепленным на рабочем органе узлом стыковки, в магазин на пониженной скорости (перемещение из позиции 1 в позицию 2). | |
3.6.3 | время разблокирования (releasing time) |
| с | Время, необходимое для отключения средств удержания узлов стыковки робота и рабочего органа в состыкованном положении для обеспечения расстыковки (в позиции 2). |
3.6.4 | время расстыковки (separation time) |
| с | Время, необходимое для расстыковки узла стыковки робота и узла стыковки рабочего органа, находящегося в магазине, в результате движения вдоль линии приближения |
3.6.5 | время отхода (drive-away time) | с | Время перемещения закрепленного на роботе узла стыковки на пониженной скорости в промежуточную позицию 4, расположенную вблизи узла стыковки рабочего органа (перемещение из позиции 3 в позицию 4). | |
3.6.6 | время перемещения (convey time) | с | Время перемещения во вторую промежуточную позицию вблизи узла стыковки рабочего органа (соответствующую точке над начальной позицией). | |
3.6.7 | время подхода (bring-on time) |
| с | Время перемещения узла стыковки робота на пониженной скорости в начальную позицию для стыковки с узлом стыковки рабочего органа, который должен быть извлечен из магазина (перемещение из позиции 5 в позицию 6). |
3.6.8 | время стыковки (coupling time) |
| с | Время сопряжения закрепленного на роботе узла стыковки с закрепленным на рабочем органе узлом стыковки при перемещении вдоль линии приближения |
3.6.9 | время захватывания (locking time) |
| с | Время срабатывания системы смены рабочего органа с использованием блокирующих элементов, обеспечивающих соединение узла стыковки робота с узлом стыковки рабочего органа (в позиции 7). |
3.6.10 | время извлечения (drive-off time) |
| с | Время выхода системы смены рабочего органа из магазина на пониженной скорости (перемещение из позиции 7 в позицию 8). |
3.6.11 | время смены рабочего органа для конкретной системы (system-specific exchange time) |
| с | Время смены рабочего органа для конкретной системы равно сумме всех временных интервалов, необходимых конкретной системе для смены рабочего органа робота. |


Приложение А
(справочное)
Формат представления характеристик системы автоматической смены рабочего органа робота
В настоящем приложении представлен формат представления информации для описания разных систем смены рабочего органа робота. Данная информация не предназначена для использования при разработке или конструировании подобных систем.
А.1 Общая информация | |||||
А.1.2 Графическое представление Простые рисунки с основными размерами | |||||
А.2.1.1.1 Внешний диаметр D | мм. | ||||
А.2.1.2 Прямоугольная или квадратная форма | |||||
А.2.1.2.1 Ширина A | мм. | ||||
А.2.1.2.2 Глубина B | мм. | ||||
А.2.2 Узел стыковки рабочего органа | |||||
А.2.2.1.1 Внешний диаметр D | мм. | ||||
А.2.2.2 Прямоугольная или квадратная форма | |||||
А.2.2.2.1 Ширина A | мм. | ||||
А.2.2.2.2 Глубина B | мм. | ||||
А.2.3 Длина, измеренная от интерфейса робота до интерфейса рабочего органа | |||||
А.2.3.1 Длина состыкованной системы | мм. | ||||
А.2.3.2 Длина узла стыковки робота | мм. | ||||
А.2.3.3 Длина узла стыковки рабочего органа | мм. | ||||
| |||||
Утвержденные максимальные значения нагрузочных характеристик соответствуют сумме статических и динамических нагрузок и должны быть предоставлены поставщиком/дистрибьютором системы автоматической смены рабочего органа. Все нагрузочные характеристики установлены для базовой плоскости.
А.3.1 Масса узла стыковки робота | кг. | ||||||||||||||||||
А.3.2 Масса узла стыковки рабочего органа | кг. | ||||||||||||||||||
________________ * Текст документа соответствует оригиналу. - . | |||||||||||||||||||
А.3.3 Максимальный изгибающий момент | Н·м. | ||||||||||||||||||
А.3.4 Максимальный скручивающий момент | Н·м. | ||||||||||||||||||
А.3.5 Максимальная сила растяжения | Н. | ||||||||||||||||||
А.3.6 Максимальная сила сжатия | Н. | ||||||||||||||||||
А.3.7 Максимальная поперечная сила | Н. | ||||||||||||||||||
А.4 Диаметры окружности центров отверстий и стержня
| |||||||||||||||||||
А.4.1.1 Круглый фланец, закрепленный на роботе | мм. | ||||||||||||||||||
А.4.1.2 Круглый фланец, закрепленный на рабочем органе | мм. | ||||||||||||||||||
А.4.1.3 Другое | |||||||||||||||||||
А.4.2.1 Стержень | мм. | ||||||||||||||||||
А.4.2.2 Паз | да | нет | . | ||||||||||||||||
А.4.2.3 Другое А.5 Процедура сопряжения А.5.1 Допуск на положение в начальной позиции: | |||||||||||||||||||
радиальный | мм, | ||||||||||||||||||
осевой | мм. | ||||||||||||||||||
А.5.2 Направление стыковки и общая длина дистанции стыковки | |||||||||||||||||||
радиальное | мм, | ||||||||||||||||||
осевое | мм. | ||||||||||||||||||
А.5.3 Повторяемость стыковки А.5.3.1 Отклонение по положению: | |||||||||||||||||||
в поперечном направлении | мм, | ||||||||||||||||||
в осевом направлении | мм. | ||||||||||||||||||
А.5.3.2 Отклонение по ориентации: | |||||||||||||||||||
- по тангажу | радиан или градусов, | ||||||||||||||||||
- по рысканию | радиан или градусов, | ||||||||||||||||||
- по крену | радиан или градусов, | ||||||||||||||||||
- предельное значение отклонения по тангажу/рысканию: | |||||||||||||||||||
радиан или градусов, | |||||||||||||||||||
радиан или градусов, | |||||||||||||||||||
- предельное значение отклонения по крену | радиан или градусов. | ||||||||||||||||||
А.5.4 Усилие стыковки | Н. | ||||||||||||||||||
А.5.5 Усилие расстыковки | Н. | ||||||||||||||||||
А.5.6 Процедура фиксации, реализация и комбинации | |||||||||||||||||||
А.5.6.1 Механическая | , | комбинированная с | ; | ||||||||||||||||
неподвижная | ; | ||||||||||||||||||
пружинная | ; | ||||||||||||||||||
нейтральная | . | ||||||||||||||||||
А.5.6.2 Пневматическая | , | комбинированная с | ; | ||||||||||||||||
под давлением | ; | ||||||||||||||||||
вакуумная | ; | ||||||||||||||||||
нейтральная | . | ||||||||||||||||||
А.5.6.3 Гидравлическая | , | комбинированная с | ; | ||||||||||||||||
нейтральная | . | ||||||||||||||||||
А.5.6.4 Электромагнитная | , | комбинированная с | ; | ||||||||||||||||
нейтральная | . | ||||||||||||||||||
А.5.7 Тип фиксации | : | ||||||||||||||||||
нежесткий | , | ||||||||||||||||||
сцепляемый | ; | ||||||||||||||||||
другой | . | ||||||||||||||||||
А.5.8 Время смены рабочего органа | |||||||||||||||||||
А.5.8.1 Время смены рабочего органа | с. | ||||||||||||||||||
А.5.8.2 Время отпускания | с. | ||||||||||||||||||
А.5.8.3 Время захватывания | с. | ||||||||||||||||||
А.6 Сигнальные и силовые соединения (подробная информация о разъемах и муфтах) | |||||||||||||||||||
А.6.1 Пневматическая муфта | , | число шлангов | . | ||||||||||||||||
А.6.2 Гидравлическая муфта | , | число шлангов | . | ||||||||||||||||
А.6.3 Электромагнитная муфта | . | ||||||||||||||||||
А.6.3.1 Сигнальная шина | , | число выводов | . | ||||||||||||||||
А.6.3.2 Силовая шина | , | число выводов | . | ||||||||||||||||
Примечание - Значения, например напряжения, тока, давления и расхода, должны быть указаны. Некоторые рекомендации должны быть приведены по передаче сигналов гидравлического или пневматического питания, например число портов, максимальное давление, размер порта сопряжения, специализированные порты и т.д.
А.6.4 Другое
А.7 Безопасность закрепления
А.7.1 Индикаторный сигнал: | да | , | нет | . | ||||||
А.7.2 Предохранительное устройство: | да | , | нет | . | ||||||
А.7.3 Другое | ||||||||||
А.8 Обозначение узла стыковки рабочего органа: | да | , | нет | . | ||||||
А.9 Тип фиксации в магазине узла стыковки рабочего органа: | ||||||||||
сцепляемый | ; | |||||||||
нежесткий | ; | |||||||||
электромагнитный | ; | |||||||||
другой | . | |||||||||
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 8373:1994 | - | *, |
ISO 9409-1:1996 | - | *, |
ISO 9409-2:1996 | - | * |
ISO 9787:1990 | - | *, |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
________________
Действует ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 "Роботы и робототехнические устройства. Термины и определения", идентичный ISO 8373:2012.
Действует ГОСТ Р 60.3.4.1-2017/ИСО 9409-1:2004 "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Круглые фланцы", идентичный ISO 9409-1:2004.
Действует ГОСТ Р 60.0.0.3-2016/ИСО 9787:2013 "Роботы и робототехнические устройства. Системы координат и обозначение перемещений", идентичный ISO 9787:2013.
УДК 621.865.8:007.52:67.05:006.354 | ОКС 25.040.30 | |
Ключевые слова: роботы, промышленные роботы, манипуляционные роботы, манипуляторы, автоматическая смена рабочего органа, термины и определения, представление характеристик | ||
Электронный текст документа
и сверен по:
, 2020
{kind=link}