ГОСТ Р 60.3.3.1-2016/ИСО 9283:1998
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы промышленные манипуляционные
РАБОЧИЕ ХАРАКТЕРИСТИКИ И СООТВЕТСТВУЮЩИЕ МЕТОДЫ ТЕСТИРОВАНИЯ
Manipulating industrial robots. Performance criteria and related test methods
ОКС 25.040.30
Дата введения 2018-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным бюджетным учреждением "Консультационно-внедренческая фирма в области международной стандартизации и сертификации "Фирма "ИНТЕРСТАНДАРТ" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 30 ноября 2016 г. N 1866-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 9283:1998* "Роботы промышленные манипуляционные. Рабочие характеристики и соответствующие методы тестирования" (ISO 9283:1998, Manipulating industrial robots - Performance criteria and related test methods, IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Сентябрь 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт является частью комплекса международных стандартов, относящихся к промышленным манипуляционным роботам. Другие стандарты этого комплекса охватывают такие темы, как безопасность, основные характеристики, системы координат, терминологию и механические интерфейсы. Необходимо отметить, что эти международные стандарты являются взаимосвязанными, а также связанными с другими международными стандартами.
Число промышленных манипуляционных роботов, используемых в производственной среде, постоянно возрастает, что подчеркивает необходимость стандартного формата для спецификации и представления характеристик роботов.
Настоящий стандарт предназначен для обеспечения понимания между пользователями и изготовителями роботов и роботизированных систем. Он определяет важные рабочие характеристики, описывает, как они должны быть специфицированы, и рекомендует, как они должны тестироваться. Пример того, как результаты тестирования должны быть отражены в отчете, включен в приложение С настоящего стандарта. Характеристики, для которых в настоящем стандарте определены методы тестирования, существенно влияют на производительность робота.
Подразумевается, что пользователь настоящего стандарта выберет, какие рабочие характеристики должны тестироваться в зависимости от его собственных конкретных требований.
Тесты, описанные в настоящем стандарте, могут применяться полностью или частично в зависимости от типа робота и требований к нему.
Основная часть настоящего стандарта связана с тестированием индивидуальных характеристик. Конкретные параметры для сравнительного тестирования приведены в приложении А для характеристик перемещения между позициями и характеристик отработки траектории.
Приложение В настоящего стандарта содержит руководство по выбору тестов для типичных применений.
Приложение С настоящего стандарта содержит рекомендуемый формат отчета о тестировании, включая минимально необходимую информацию и итог результатов тестирования.
1 Область применения
Настоящий стандарт описывает методы определения и тестирования следующих рабочих характеристик промышленных манипуляционных роботов:
- точность позиционирования и повторяемость позиционирования;
- разнонаправленное изменение точности позиционирования;
- точность отработки расстояния и повторяемость отработки расстояния;
- время стабилизации положения;
- перерегулирование по положению;
- дрейф характеристик позиционирования;
- взаимозаменяемость;
- точность отработки траектории и повторяемость отработки траектории;
- точность отработки траектории при переориентации;
- отклонения на поворотах;
- характеристики скорости отработки траектории;
- минимальное время позиционирования;
- статическую податливость;
- отклонения при поперечных перемещениях.
Настоящий стандарт не определяет, какие из перечисленных выше рабочих характеристик должны быть выбраны для тестирования конкретного робота. Тесты, описанные в настоящем стандарте, главным образом предназначены для разработки и проверки индивидуальных характеристик роботов, но могут также быть использованы для таких целей, как испытание опытных образцов, типовые испытания или приемочные испытания.
Чтобы произвести сравнение рабочих характеристик между разными роботами, как это определено в настоящем стандарте, следующие параметры должны быть одинаковыми: габариты куба для тестирования, тестовые нагрузки, тестовые скорости, тестовые траектории, тестовые циклы, параметры окружающей среды.
В приложении А приведены параметры, специфичные для сравнительного тестирования характеристик перемещения между позициями и характеристик отработки траектории.
Настоящий стандарт применим ко всем промышленным манипуляционным роботам, соответствующим их определению в ИСО 8373. Однако в тексте настоящего стандарта термин "робот" обозначает промышленный манипуляционный робот.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 8373:1994, Robots and robotic devices - Vocabulary (Роботы и робототехнические устройства. Термины и определения)
________________
Заменен на ISO 8373:2012.
ISO 9787:1990, Manipulating industrial robots - Coordinate Systems and motions (Промышленные манипуляционные роботы. Системы координат и типы перемещений)
________________
Заменен на ISO 9787:2013.
ISO 9946:1991, Manipulating industrial robots - Presentation of characteristics (Промышленные манипуляционные роботы. Представление характеристик)
________________
Заменен на ISO 9946:1999.
3 Термины и определения
В настоящем стандарте применены термины по ИСО 8373, а также следующие термины с соответствующими определениями:
3.1 кластер (cluster): Множество измеренных точек, используемых для расчета точности и повторяемости характеристик (пример в виде диаграммы показан на рисунке 8).
3.2 центр тяжести (barycentre): Для кластера из n точек, заданных своими координатами (![]() ), центром тяжести кластера точек является точка, координаты которой равны средним значениям,
), центром тяжести кластера точек является точка, координаты которой равны средним значениям, ,
и
, рассчитанным по формулам, приведенным в 7.2.1.
3.3 запаздывание измерения (measuring dwell): Задержка регистрации данных в точке измерения (например, время между управляющим сигналом "в позиции" и сигналом "начало измерения" измерительного устройства).
3.4 время измерения (measuring time): Время, затраченное на регистрацию измерений.
4 Единицы измерения
Если не указано иное, все размерные величины представлены следующими единицами измерения:
- длина в миллиметрах (мм);
- углы в радианах или градусах (рад) или (°);
- время в секундах (с);
- масса в килограммах (кг);
- сила в ньютонах (Н);
- скорость в метрах в секунду (м/с), градусах в секунду (°/с) или радианах в секунду (рад/с).
5 Сокращения и обозначения
В настоящем стандарте использованы следующие сокращения и обозначения.
5.1 Основные сокращения
А - точность;
R - повторяемость;
v - изменение;
F - флюктуация;
d - дрейф;
Р - позиция;
D - расстояние;
Т - путь (траектория);
V - скорость;
W - поперечное перемещение;
Е - взаимозаменяемость.
5.2 Параметры
а, b, с - ориентация (угловые составляющие) относительно осей х, у и z;
х, у, z - линейные координаты по осям х, у, z;
n - число циклов измерения;
m - число точек измерения на траектории;
S - стандартное отклонение;
D - расстояние между двумя точками;
- расстояние между фактической позицией и центром тяжести фактических позиций;
v - скорость отработки траектории;
АР - точность позиционирования;
RP - повторяемость позиционирования;
vAP - изменение точности разнонаправленного позиционирования;
AD - точность отработки расстояния;
RD - повторяемость отработки расстояния;
t - время стабилизации позиции;
OV - перерегулирование по положению;
dAP - дрейф точности позиционирования;
dRP - дрейф повторяемости позиционирования;
АТ - точность отработки траектории;
RT - повторяемость отработки траектории;
CR - ошибка скругления при повороте;
СО - перерегулирование при повороте;
AV - точность скорости отработки траектории;
RV - повторяемость скорости отработки траектории;
FV - флюктуация скорости отработки траектории;
WS - ошибка хода поперечного перемещения;
WF - ошибка частоты поперечного перемещения.
5.3 Индексы
а, b, с - обозначает характеристики ориентации относительно осей х, у, z;
х, у, z - обозначает характеристики позиционирования по осям х, у, z;
с - команда;
i - обозначает i-ю абсциссу;
j - обозначает j-й цикл;
k - обозначает k-е направление;
h - обозначает h-e направление;
1, 2,... - обозначает позицию номер 1, 2,...;
е - угловая точка (ребро);
g - точка, в которой параметры робота снижаются в пределах указанных характеристик отработки траектории;
р - позиция.
5.4 Другие обозначения
С-С
- углы тестового куба;
Е-E
- углы прямоугольной плоскости для измерения характеристик отработки траектории;
G - центр тяжести кластера фактических позиций;
О - начало измерительной системы координат.
Примечание - Дополнительные обозначения пояснены в соответствующих пунктах.
6 Условия тестирования характеристик
6.1 Установка робота
Робот должен быть установлен в соответствии с рекомендациями изготовителя.
6.2 Условия до начала тестирования
Робот должен быть полностью собран и приведен в работоспособное состояние. Все необходимые операции по выравниванию, регулировочные процедуры и функциональные тесты должны быть успешно выполнены.
Тестированию должна предшествовать необходимая операция по прогреву, если это указано изготовителем, за исключением тестирования дрейфа характеристик позиционирования, которое должно начинаться с холодного состояния.
Если у робота имеется возможность регулировки пользователем, которая может повлиять на любую из тестируемых характеристик, или если характеристики могут быть зарегистрированы только с помощью специальных функций (например, возможность калибровки, при которой позиции задаются с помощью программирования в автономном режиме), то условия проведения тестирования должны быть указаны в отчете о тестировании и (в тех случаях, когда это необходимо для отдельных характеристик) должны поддерживаться постоянными во время каждого теста.
6.3 Эксплуатационные и внешние условия
Рабочие характеристики, указанные изготовителем и определенные соответствующими методами тестирования, установленными в настоящем стандарте, являются достоверными только для внешних и нормальных эксплуатационных условий, оговоренных изготовителем.
6.3.1 Эксплуатационные условия
Нормальные эксплуатационные условия, используемые при тестировании, должны соответствовать условиям, указанным изготовителем.
К нормальным эксплуатационным условиям относятся, но не ограничиваются ими, требования к электрическому, гидравлическому и пневматическому питанию, колебаниям и нарушениям питания, максимальным границам безопасной эксплуатации (см. ИСО 9946).
6.3.2 Внешние условия
6.3.2.1 Введение
Требования к внешним условиям при тестировании, определенным в 6.3.2.2, должны быть указаны изготовителем.
К внешним условиям относятся температура, относительная влажность, электромагнитные и электростатические поля, радиопомехи, загрязнения атмосферы и ограничение по высоте над уровнем моря.
6.3.2.2 Температура при тестировании
Температура окружающего воздуха () при тестировании должна быть равна 20°С. Другие температуры окружающего воздуха должны быть отмечены и пояснены в отчете о тестировании. Температура при тестировании должна поддерживаться равной (
)°С.
Робот и измерительные инструменты должны находиться во внешней среде тестирования достаточно длительное время (желательно в течение ночи), чтобы перед началом тестирования они находились в термостабильном состоянии. Они должны быть защищены от сквозняков и внешних источников тепла (например, солнечного света или нагревателей).
6.4 Принципы измерения перемещений
Результаты измерения положения и ориентации (,
,
,
,
,
) должны быть выражены в базовой системе координат (см. ИСО 9787), либо в системе координат, связанной с измерительным оборудованием.
Если задаваемые положения и траектории робота определены в другой системе координат (например, с помощью программирования в автономном режиме), отличающейся от измерительной системы, то данные должны быть преобразованы в одну общую систему координат. Взаимосвязь между системами координат должна быть установлена с помощью измерения. В данном случае измеренные положения, определенные в 7.2.1, не должны использоваться в качестве начальных положений для преобразования данных. Начальная и измеренная точки должны находиться внутри тестового куба и должны быть удалены друг от друга на возможно большее расстояние (например, если точки от до
являются точками измерения, то в качестве начальных точек могут быть использованы
,
,
,
).
Для рабочих характеристик, связанных с направлением, в результатах тестирования должна быть указана взаимосвязь между базовой системой координат и выбранной системой координат.
Точка измерения должна лежать на расстоянии от механического интерфейса, указанном изготовителем. Позиция этой точки в системе координат механического интерфейса (см. ИСО 9787) должна быть зарегистрирована (см. рисунок 7).
Последовательность поворотов, используемая при расчете отклонения ориентации, должна быть построена таким образом, чтобы ориентация могла быть непрерывной по значению. При этом безразлично, осуществляется ли поворот относительно подвижных осей (навигационных углов или углов Эйлера) или относительно неподвижных осей.
Если не указано иное, то измерения должны быть произведены после того, как фактическое положение стабилизируется.
6.5 Измерительные приборы
Для измерения характеристик траектории, перерегулирования и стабилизации положения, динамические характеристики аппаратуры получения данных (например, частота опроса) должны быть достаточно высокими для того, чтобы обеспечить получение адекватного представления измеряемых характеристик.
Измерительная аппаратура, используемая при тестировании, должна быть калибрована, а погрешность измерения должна быть оценена и указана в отчете о тестировании. Во внимание следует принимать следующие параметры:
- инструментальные погрешности;
- систематические погрешности, связанные с используемым методом измерения;
- вычислительные погрешности.
Общая погрешность измерения не должна превышать 25% от значения тестируемой характеристики.
6.6 Нагрузка на механический интерфейс
Все тесты должны выполняться с тестовой нагрузкой, равной 100% от номинальных нагрузочных условий, т.е. масса, положение центра тяжести, моменты инерции должны соответствовать спецификации изготовителя. Номинальные нагрузочные условия должны быть указаны в отчете о тестировании.
Для того чтобы охарактеризовать робота с помощью характеристик, зависящих от нагрузки, могут быть проведены дополнительные тесты с массой номинальной нагрузки, уменьшенной на 10%, как показано в таблице 1, или с другим значением, указанным изготовителем.
Если часть измерительных приборов устанавливается на роботе, то их масса и расположение должны рассматриваться как часть тестовой нагрузки.
На рисунке 1 показан пример тестового рабочего органа со смещенными CG (центром тяжести) и TCP (центральной точкой инструмента). TCP является точкой измерения (МР) во время тестирования. Позиция точки измерения должна быть указана в отчете о тестировании.
Таблица 1 - Тестовые нагрузки
Тестируемые характеристики | Используемая нагрузка | |
100% от номинальной нагрузки | Масса номинальной нагрузки уменьшена на 10% | |
Точность и повторяемость позиционирования | X | О |
Разнонаправленное изменение точности позиционирования | X | О |
Точность и повторяемость отработки расстояния | X | - |
Время стабилизации положения | X | О |
Перерегулирование по положению | X | О |
Дрейф характеристик позиционирования | X | - |
Взаимозаменяемость | X | О |
Точность и повторяемость отработки траектории | X | О |
Точность отработки траектории при переориентации | X | О |
Отклонения на поворотах | X | - |
Характеристики скорости отработки траектории | X | О |
Минимальное время позиционирования | X | О |
Статическая податливость | - | См. раздел 10 |
Отклонения при поперечных перемещениях | X | О |
|
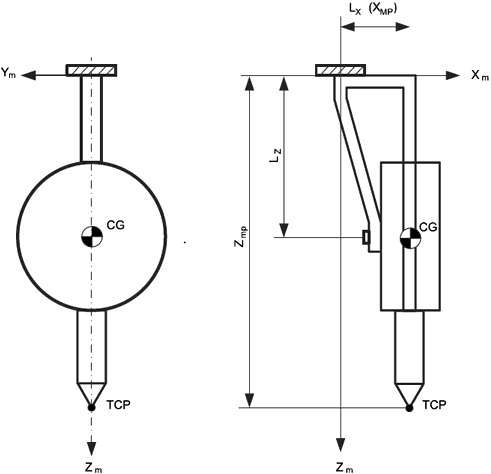
Рисунок 1 - Пример тестового рабочего органа
6.7 Тестовые скорости
Все характеристики позиционирования должны тестироваться при максимально возможной скорости перемещения между заданными позициями, т.е. с коррекцией скорости, установленной на 100% в каждом случае. Дополнительные тесты могут быть проведены при 50% и/или 10% от данной скорости.
Для характеристик отработки траектории все тесты должны выполняться при 100%, 50% и 10% от номинальной скорости отработки траектории, указанной изготовителем, для каждой тестируемой характеристики (см. таблицу 3). Номинальная скорость отработки траектории должна быть указана в отчете о тестировании. Скорость, задаваемая для каждого теста, зависит от формы и длины траектории. Робот должен быть способен развивать данную скорость после прохождения, по крайней мере, 50% от длины тестовой траектории. Соответствующие рабочие характеристики должны быть достоверны в течение этого времени.
В отчете должно быть отражено, что скорость была задана в позиционном или контурном режиме управления, если есть возможность выбора этого режима.
Все данные, относящиеся к тестовым скоростям, приведены в таблицах 2 и 3.
Таблица 2 - Тестовые скорости для характеристик отработки положения
Тестируемые характеристики | Скорость | |
100% от номинальной скорости | 50% или 10% от номинальной скорости | |
Точность и повторяемость позиционирования | X | О |
Разнонаправленное изменение точности позиционирования | X | О |
Точность и повторяемость отработки расстояния | X | О |
Время стабилизации положения | X | О |
Перерегулирование по положению | X | О |
Дрейф характеристик позиционирования | X | - |
Взаимозаменяемость | X | О |
Минимальное время позиционирования | См. раздел 9 и таблицу 20 | |
Таблица 3 - Тестовые скорости для характеристик отработки траектории
Тестируемые характеристики | Скорость | ||
100% от номинальной скорости | 50% от номинальной скорости | 10% от номинальной скорости | |
Точность и повторяемость отработки траектории | X | X | X |
Точность отработки траектории при переориентации | X | X | X |
Отклонения на поворотах | X | X | X |
Характеристики скорости отработки траектории | X | X | X |
Отклонения при поперечных перемещениях | X | X | X |
6.8 Определения тестовых позиций и траекторий
6.8.1 Цель
В данном подразделе описано, как пять подходящих позиций размещены в плоскости, расположенной внутри куба в пределах рабочей зоны. В нем также описаны тестовые траектории, по которым должно происходить перемещение. Если робот имеет большой диапазон перемещения по одной оси и небольшой по другой, то куб должен быть заменен прямоугольным параллелограммом.
6.8.2 Размещение куба в рабочем пространстве
Куб с вершинами, обозначенными от до
(см. рисунок 2), расположенный в рабочей зоне, должен удовлетворять следующим требованиям:
- куб должен быть расположен в той части рабочей зоны, которая будет наиболее использована;
- куб должен иметь максимальный объем, допустимый для граней, параллельных базовой системе координат.
Рисунок, на котором показано расположение используемого куба в рабочей зоне, должен быть включен в отчет о тестировании.
6.8.3 Расположение используемых плоскостей внутри куба
Для тестирования позиционирования должна использоваться одна из следующих плоскостей, для которой изготовитель определил действующие значения в спецификации:
a) -
-
-
;
b) -
-
-
;
c) -
-
-
;
d) -
-
-
.
В отчете о тестировании должна быть указана одна из четырех плоскостей, которая использовалась при тестировании.
6.8.4 Тестовые позиции
Пять точек измерения расположены на диагоналях плоскости измерений и соответствуют точкам (-
) выбранной плоскости, преобразованной с помощью осевого (Х
) и радиального (Z
) сдвига точки измерения. Точки
-
представляют позиции опорной точки кисти робота.
Плоскость измерений параллельна выбранной плоскости, см. рисунки 3 и 7.
|
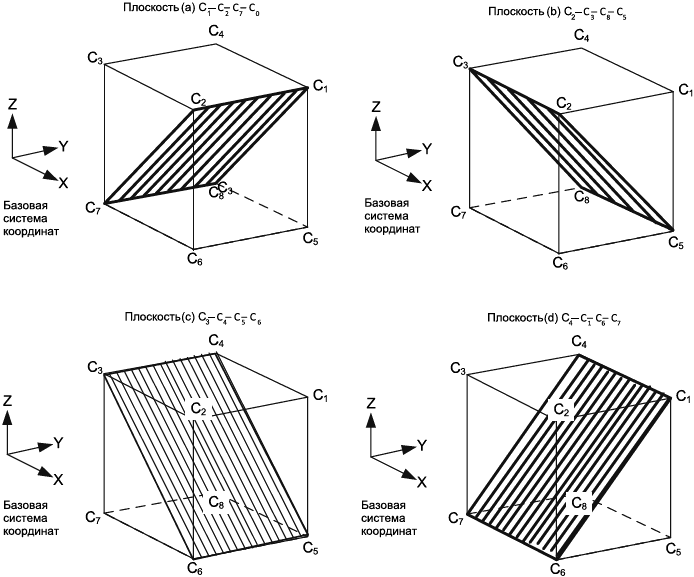
Рисунок 2 - Расположение куба в рабочей зоне
Тестовые позиции должны быть определены в базовой системе координат (предпочтительно) и/или в координатах шарниров, в соответствии с указанием изготовителя.
является точкой пересечения диагоналей и центром куба. Точки
-
расположены на расстоянии от концов диагоналей, равном (10±2)% от длины диагонали (см. рисунок 4). Если это невозможно, тогда должна быть взята ближайшая точка на диагонали и отмечена в отчете.
Позиции, используемые для тестирования характеристик отработки положения, приведены в таблице 4.
Таблица 4 - Позиции, используемые для тестирования характеристик позиционирования
Тестируемые характеристики | Позиции | ||||
Точность и повторяемость позиционирования | Х | X | Х | Х | X |
Разнонаправленное изменение точности позиционирования | Х | X | - | Х | - |
Точность и повторяемость отработки расстояния | - | X | - | Х | - |
Время стабилизации положения | Х | X | Х | Х | X |
Перерегулирование по положению | Х | X | Х | Х | X |
Дрейф характеристик позиционирования | Х | - | - | - | - |
Взаимозаменяемость | Х | X | Х | Х | X |
|
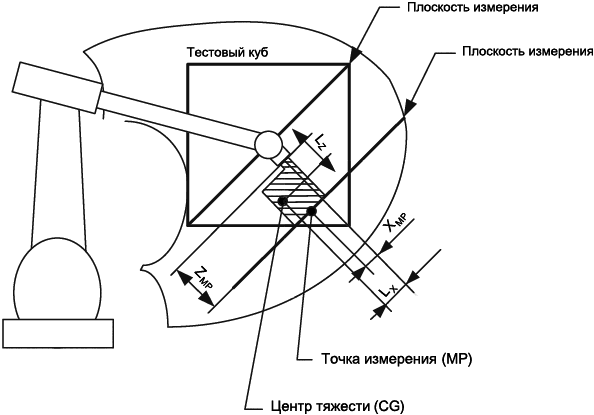
TCP - точка измерения в системе координат механического интерфейса
Рисунок 3 - Выбранная плоскость и плоскость измерения
6.8.5 Требования к перемещению
Все шарниры должны быть задействованы во время перемещения между всеми позициями.
Во время тестирования необходимо обратить внимание на то, чтобы не выйти за границы производственной операции.
6.8.6 Отрабатываемые траектории
6.8.6.1 Расположение тестовой траектории
Должен быть использован куб, описанный в 6.8.2.
Тестовая траектория должна быть расположена на одной из четырех плоскостей, показанных на рисунке 5. Для роботов с шестью степенями подвижности должна быть использована плоскость 1, если иное не указано изготовителем. Для роботов, имеющих менее шести степеней подвижности, используемая плоскость должна быть указана изготовителем.
Во время измерения характеристик отработки траектории центр механического интерфейса должен лежать в выбранной плоскости (см. рисунок 3), а его ориентация должна оставаться постоянной относительно данной плоскости.
6.8.6.2 Формы и размеры тестовых траекторий
На рисунке 6 показаны примеры расположения линейной траектории, прямоугольной траектории и двух круговых траекторий в одной из четырех возможных тестовых плоскостей.
Форма тестовой траектории должна быть линейной или круговой, за исключением отклонений на повороте (см. 8.5 и рисунок 22). Если используются траектории другой формы, то они должны соответствовать указаниям изготовителя и быть включены в отчет о тестировании.
Для линейной траектории, расположенной по диагонали куба, ее длина должна составлять 80% от расстояния между противоположными углами выбранной плоскости. Примером является расстояние от Р до Р
на рисунке 6.
Другая линейная траектория от Р до Р
может быть использована для теста переориентации, описанного в 8.4.
В тесте круговых траекторий должны быть протестированы две разных окружности. См. рисунок 6.
Диаметр большей окружности должен составлять 80% от длины боковой грани куба. Центр окружности должен располагаться в точке Р.
Меньшая окружность должна иметь диаметр, равный 10% от диаметра большей окружности в плоскости. Центр окружности должен располагаться в точке Р, см. рисунок 6.
|
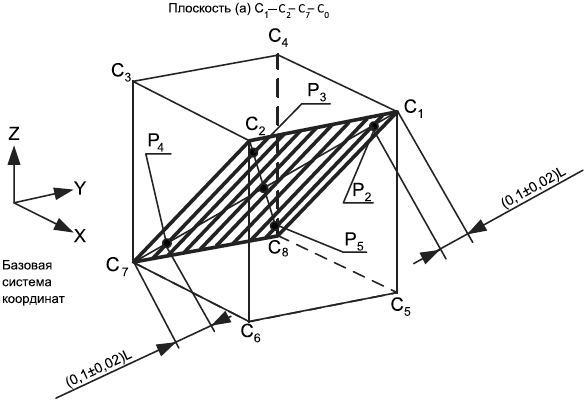
Рисунок 4 - Используемые позиции
Необходимо использовать минимальное число заданных позиций. Число и расположение заданных положений и метод программирования (программирование обучением, ручной ввод числовых данных или программирование в автономном режиме) должны быть указаны в отчете о тестировании.
Для прямоугольной траектории, углы которой обозначены как ,
,
и
, каждый угол должен располагаться на расстоянии от противоположного ему угла на плоскости, равном (10±2)% от диагонали плоскости. Пример показан на рисунке 6, на котором точки
,
,
и
совмещены с точками
,
,
и
, соответственно.
|
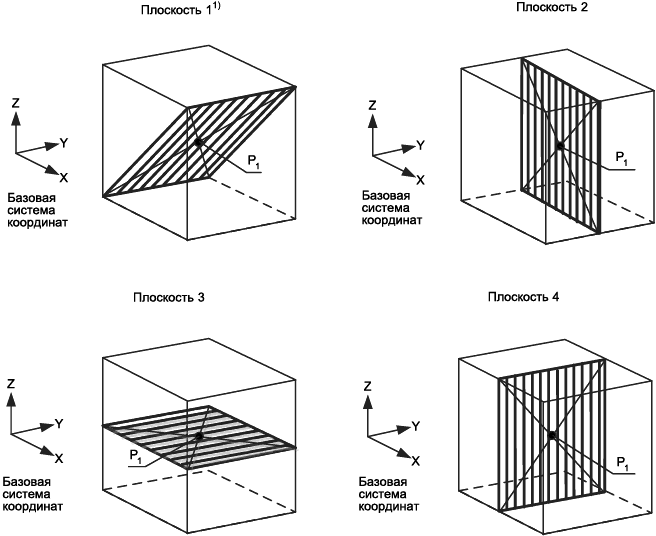
________________
Использовать для роботов с шестью степенями подвижности.
Рисунок 5 - Определения плоскостей для размещения тестовой траектории
|
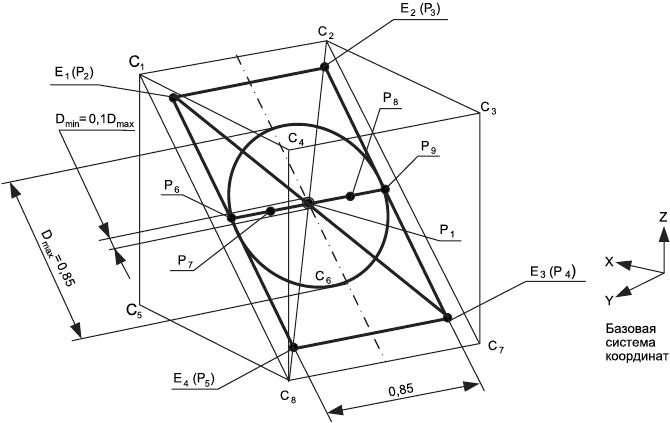
Рисунок 6 - Примеры тестовых траекторий
6.9 Число циклов
Число циклов, которое необходимо выполнить при тестировании каждой характеристики, приведено в таблице 5.
Таблица 5 - Число циклов
Тестируемые характеристики | Число циклов |
Точность и повторяемость позиционирования | 30 |
Разнонаправленное изменение точности позиционирования | 30 |
Точность и повторяемость отработки расстояния | 30 |
Время стабилизации положения | 3 |
Перерегулирование по положению | 3 |
Дрейф характеристик позиционирования | Непрерывное зацикливание в течение 8 часов |
Взаимозаменяемость | 30 |
Точность и повторяемость отработки траектории | 10 |
Точность отработки траектории при переориентации | 10 |
Отклонения на поворотах | 3 |
Характеристики скорости отработки траектории | 10 |
Минимальное время позиционирования | 3 |
Отклонения при поперечных перемещениях | 3 |
6.10 Процедура тестирования
Последовательность тестов не влияет на результаты, но рекомендуется выполнить тест времени стабилизации положения до теста повторяемости позиционирования для определения выдержки времени измерения. Тесты для перерегулирования по положению, точности и повторяемости позиционирования могут быть выполнены одновременно. Тест дрейфа характеристик позиционирования должен быть выполнен независимо.
Характеристики позиционирования должны быть протестированы при позиционном или контурном управлении. Характеристики отработки траектории должны быть протестированы при контурном управлении.
Определение точности и повторяемости отработки траектории может быть выполнено параллельно с определением скорости отработки траектории при условии, что измерительное устройство будет способно это сделать.
Рекомендуется, чтобы тестирование скорости выполнялось до измерения точности отработки траектории при использовании идентичных параметров траектории. Это обеспечит использование правильных эталонных величин при определении характеристик отработки траектории.
При программировании постоянной скорости отработки траектории, необходимо обеспечить, чтобы управление корректировкой превышением скорости было установлено на 100%, и чтобы скорость не снижалась автоматически в результате любых ограничений, с которыми может столкнуться робот при отработке траектории.
Одновременное тестирование может быть проведено для определения:
- точности/повторяемости отработки траектории и характеристик скорости;
- перерегулирования на поворотах и ошибки скругления.
За исключением характеристик дрейфа позиционирования, получение данных для одной характеристики при одном наборе условий должно быть осуществлено за как можно короткий период времени.
Любые запрограммированные задержки, используемые для измерений, например, выдержка времени при измерении и время измерения, должны быть отражены в отчете о тестировании.
6.11 Тестируемые характеристики. Применения
Тесты, описанные в настоящем стандарте, могут выполняться целиком или частично, в зависимости от типа робота и требований (применения).
Руководство по выбору нужных тестов робота для некоторых типовых применений приведено в приложении В.
7 Характеристики позиционирования
7.1 Общее описание
Заданная позиция (см. рисунок 7): позиция, определенная с помощью программирования обучением, ручного ввода числовых данных или программирования в автономном режиме.
Заданные позиции для роботов, программируемых обучением, должны быть определены как точка измерения на роботе (см. рисунок 7). Данная точка достигается в процессе программирования путем перемещения робота как можно ближе к нужным точкам в кубе (,
,....). Координаты, зарегистрированные измерительной системой, впоследствии используются в качестве "заданной позиции" при расчете точности, основанном на последовательности фактических положений.
Фактическая позиция (см. рисунок 7): позиция, достигнутая роботом при автоматическом режиме работы в ответ на заданную позицию.
Характеристики точности и повторяемости позиционирования, определенные в данном разделе, характеризуют различие между заданной и фактической позицией и флюктуации фактических позиций при многократных повторных перемещениях в заданную позицию.
Ошибки позиционирования могут быть вызваны:
- разрешающей способностью собственной системы управления;
- ошибками преобразования координат;
- различиями между размерами шарнирной конструкции и размерами, использованными в модели, встроенной в систему управления роботом;
- механическими причинами, такими как зазоры, гистерезис, трение и внешними воздействиями, такими как температура.
Метод ввода данных для заданной позиции зависит от аппаратуры управления роботом и оказывает существенное влияние на точностные характеристики. Используемый метод должен быть четко определен в спецификации или в отчете о тестировании.
Если заданная позиция определена с помощью ввода числовых данных, то взаимосвязь (т.е. расстояние и ориентация) между разными заданными позициями известна (или может быть определена); она требуется для определения и измерения характеристик отработки расстояния (см. 7.3).
Для измерения точности позиционирования с использованием ввода числовых данных необходимо знать расположение измерительной системы относительно базовой системы координат (см. 6.8.4).
|
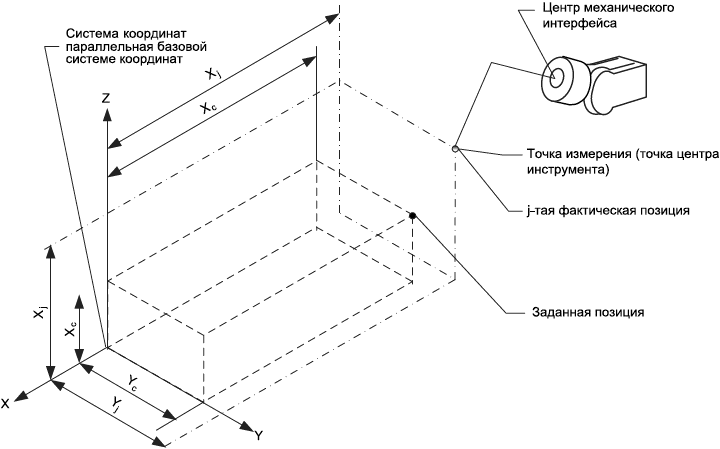
Рисунок 7 - Связь между заданной и фактической позициями (на рисунках 8 и 9 также показана эта взаимосвязь)
7.2 Точность и повторяемость позиционирования
7.2.1 Точность позиционирования (АР)
Точность позиционирования характеризует разницу между заданной позицией и средним значением фактических позиций, зафиксированных при перемещениях робота в заданное положение с одного и того же направления.
Точность позиционирования подразделяется на:
a) точность расположения: разница между расположением заданной позиции и центром масс фактических позиций, см. рисунок 8;
b) точность ориентации: разница между ориентацией в заданной позиции и средним значением фактических ориентаций, см. рисунок 9.
|
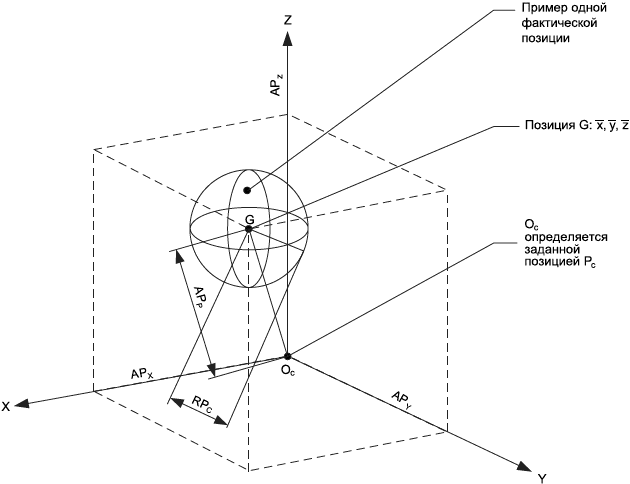
Рисунок 8 - Точность и повторяемость расположения
|
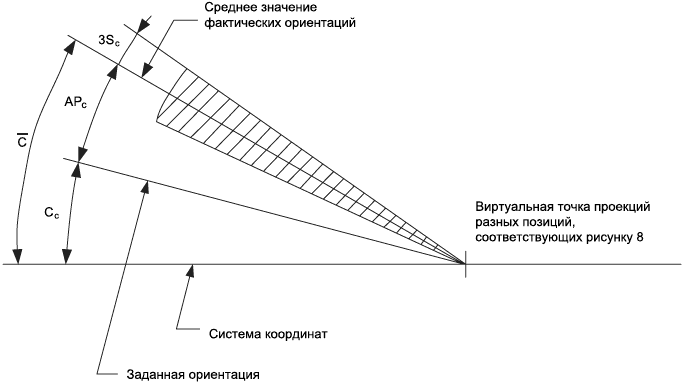
Примечание - Такой же рисунок может быть применен для и
.
Рисунок 9 - Точность и повторяемость ориентации
Точность позиционирования вычисляется следующим образом:
Точность расположения
| , |
![]() ,
,
![]() ,
,
![]() ,
,
где ![]() ,
,
![]() ,
,
![]() ,
,
,
и
- координаты центра тяжести кластера точек, полученных после повторения одной и той же позиции n раз;
х, у
и z
- координаты заданной позиции;
х, у
и z
- координаты j-й фактической позиции.
Точность ориентации:
| ||
| , | |
|
где ![]() ,
,
![]() ,
,
![]() .
.
Данные значения являются средними значениями углов, полученных после повторения одной и той же позиции n раз.
а, b
и с
- углы заданной позиции.
а, b
и с
- углы j-й фактической позиции.
В таблице 6 приведены тестовые условия для точности позиционирования.
Таблица 6 - Тестовые условия для точности позиционирования
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | P | 30 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
Начиная с позиции , робот последовательно перемещает свой механический интерфейс в позиции
,
,
,
,
. Каждая из позиций должна быть достигнута с использованием однонаправленного подхода, как показано на любом из циклов, изображенных на рисунке 10. Направления подхода, использованные во время теста должны быть такими же, как те, которые использовались при программировании.
Для каждой позиции вычисляются точность расположения (АР) и точность ориентации (АР
, АР
, АР
).
|
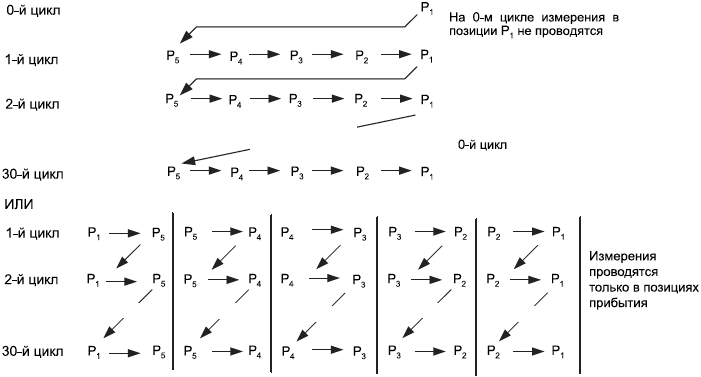
Рисунок 10 - Иллюстрация возможных циклов
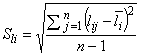
7.2.2 Повторяемость позиционирования (RP)
Повторяемость позиционирования характеризует близость между фактическими позициями, полученными после n повторений перемещения в заданную позицию с одного и того же направления.
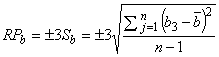
Для данной позиции повторяемость выражается:
- значением RP, которое представляет радиус сферы, центр которой совпадает с центром тяжести и которое вычисляется, как показано ниже (см. рисунок 8);
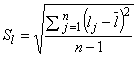
- разбросом значений углов ±3S, ±3S
, ±3S
относительно средних значений
,
, где S
, S
и S
- стандартные отклонения (см. рисунок 9), при этом:
Повторяемость расположения
| , |
где ![]() ;
;
![]() ,
,
где ,
,
и х
, у
, z
определены как в 7.2.1.
 .
.
Повторяемость ориентации:
| ||
| . | |
|

Примечание - Данная характеристика может быть вычислена даже в том случае, когда расстояния не соответствуют нормальному распределению.
В таблице 7 приведены тестовые условия для повторяемости позиционирования.
Таблица 7 - Тестовые условия для повторяемости позиционирования
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; |
| 30 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
Процедура аналогична процедуре из 7.2.1.
Для каждой позиции вычисляются RP и угловые отклонения RP, RP
и RP
. Для особых применений RP может быть также выражена своими компонентами RP
, RP
и RP
.
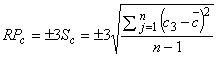
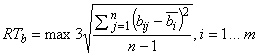
7.2.3 Разнонаправленное изменение точности позиционирования (vAP)
Разнонаправленное изменение точности позиционирования характеризует разницу между разными средними значениями фактических позиций, полученными при перемещении в одну и ту же заданную позицию n раз с трех ортогональных направлений (см. рисунок 11).
vAP - максимальное расстояние между центрами тяжести точек, измеренных в конце разных траекторий.
vAP, vAP
, vAP
- максимальная разница между средним значением углов, измеренных в конце разных траекторий.
Разнонаправленное изменение точности позиционирования вычисляется следующим образом:
| . |
Число траекторий подхода к заданной позиции равно трем.
| ||
| . | |
|
В таблице 8 приведены тестовые условия для разнонаправленного изменения точности позиционирования.
Таблица 8 - Тестовые условия для разнонаправленного изменения точности позиционирования
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; |
| 30 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
Робот программируется так, чтобы его механический интерфейс перемещался в позиции по трем траекториям, параллельным осям базовой системы координат. Для в отрицательном направлении, а для
и
- изнутри куба (см. рисунки 11 и 12). Если это невозможно реализовать, то выбранные направления перемещения в заданную позицию должны быть указаны изготовителем и включены в отчет.
Для каждой позиции vAP вычисляются vAP
, vAP
, vAP
.
|
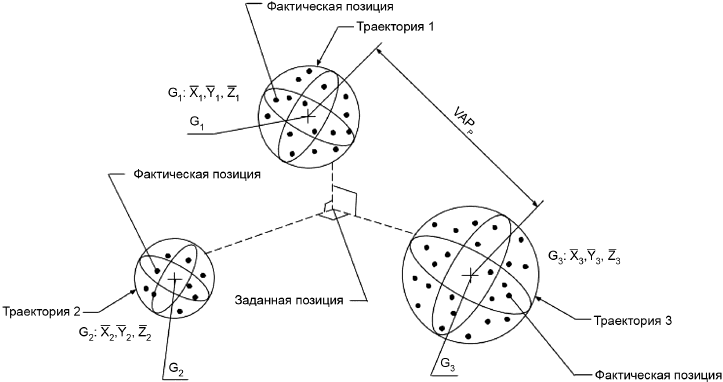
Рисунок 11 - Разнонаправленное изменение точности позиционирования
|
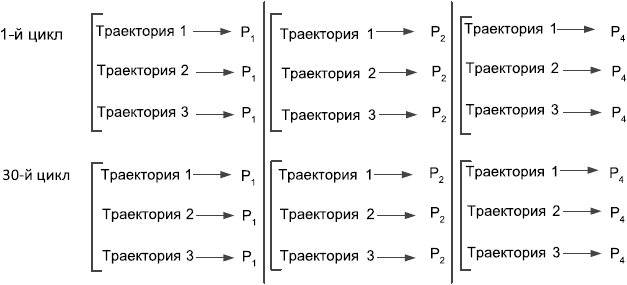
Рисунок 12 - Иллюстрация цикла
7.3 Характеристики точности и повторяемости отработки расстояния
Данные характеристики применимы только к роботам с возможностью автономного программирования или ручного ввода данных.
7.3.1 Введение
Характеристики точности и повторяемости отработки расстояния, определенные в данном подразделе, характеризуют отклонения в расстоянии между двумя заданными позициями и двумя множествами фактических позиций, а также флюктуации отработки расстояний для серий повторных перемещений между двумя позициями.
Точность и повторяемость отработки расстояния могут быть измерены с помощью задания позиций одним из двух способов:
a) обе позиции задаются с использованием программирования в автономном режиме;
b) одна позиция задается с помощью обучения, а расстояние до второй позиции программируется с помощью ручного ввода данных.
Использованный способ должен быть отражен в отчете.
7.3.2 Точность отработки расстояния (AD)
Точность отработки расстояния характеризует различие по положению и ориентации между заданным расстоянием и средним значением фактически отработанных расстояний.
Обозначая заданные позиции ,
и фактические позиции
,
, точность отработки расстояния по положению равна разнице в расстоянии между
,
и
,
(см. рисунок 13) при повторении отработки заданного расстояния n раз.
Точность отработки расстояния определяется двумя факторами: точностью отработки расстояния по положению и точностью отработки расстояния по ориентации.
Точность отработки расстояния по положению AD вычисляется следующим образом:
| , |
где ![]() ,
,
![]() ,
,
![]() ,
,
где ,
и
- координаты
, заданные в системе управления робота;
,
и
- координаты
, заданные в системе управления робота;
,
и
- координаты
,
,
и
- координаты
;
n - число повторений.
|
Рисунок 13 - Точность отработки расстояния
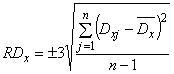
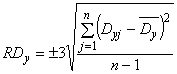
Точность отработки расстояния по положению может также быть выражена для каждой оси базовой системы координат и вычисляется следующим образом:
![]() ,
,
![]() ,
,
![]() ,
,
где ![]() '
'
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Точность отработки расстояния по ориентации вычисляется аналогично точности отработки расстояния по одной оси.
| , |
где ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где a, b
и c
- ориентации P
, заданные в системе управления робота;
а, b
и с
- ориентации Р
, заданные в системе управления робота;
a, b
и c
- ориентации Р
;
a, b
и c
- ориентации Р
;
n - число повторений.
В таблице 9 приведены тестовые условия для точности отработки расстояния.
Таблица 9 - Тестовые условия для точности отработки расстояния
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | Р | 30 |
Робот запрограммирован для перемещения механического интерфейса последовательно в позиции Р и Р
, начиная с позиции Р
. Измерения проводятся однонаправленно (см. рисунок 14).
В отчет, как минимум, должно быть включено значение AD.
|
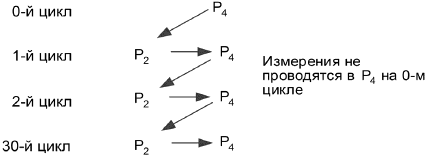
Рисунок 14 - Иллюстрация цикла
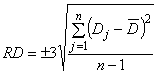
7.3.3 Повторяемость отработки расстояния (RD)
Повторяемость отработки расстояния представляет близость между несколькими фактическими расстояниями для одного и того же заданного расстояния, отработанными n раз в одном и том же направлении.
Повторяемость отработки расстояния включает повторяемость по положению и ориентации.
Повторяемость отработки расстояния для данного заданного расстояния вычисляется следующим образом:
| , |
 ,
,
 ,
,
 .
.
Для ориентации применяют следующие выражения с разными переменными, определенными в 7.3.2:
| . |
В таблице 10 приведены тестовые условия для повторяемости отработки траектории.
Таблица 10 - Тестовые условия для повторяемости отработки траектории
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | Р | 30 |
Применяется процедура, определенная в 7.3.2. В отчет, как минимум, должно быть включено значение RD.
7.4 Время стабилизации положения
Время стабилизации положения является характеристикой робота, которая характеризует, как быстро робот может остановиться в фактической позиции. На рисунке 15 показан пример подхода к фактической позиции в трехмерном пространстве. Необходимо понимать, что время стабилизации положения связано также с перерегулированием и другими рабочими характеристиками роботов.
Время стабилизации положения должно измеряться так же, как перерегулирование в 7.5. Робот перемещается в том же цикле, который представлен в 7.2.1, с тестовой нагрузкой и тестовыми скоростями. После того, как робот достигнет заданной позиции Р, местоположение точки измерения должно непрерывно измеряться до тех пор, пока не будет обеспечена стабилизация.
Время стабилизации положения измеряется как время, прошедшее с момента пересечения роботом зоны ограничения до момента, когда робот останется в пределах данной зоны. Зона ограничения определяется как повторяемость в соответствии с 7.2.2 либо как значение, установленное изготовителем.
Данная процедура должна быть повторена три раза, и для каждой позиции вычисляется среднее значение t трех циклов (см. рисунок 16).
В таблице 11 приведены тестовые условия для времени стабилизации положения.
|
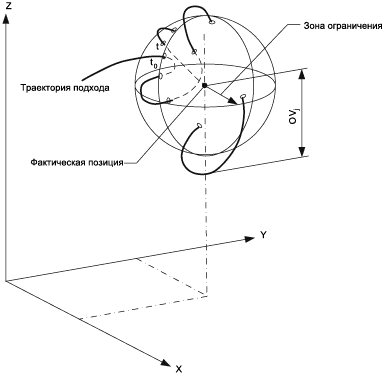
Рисунок 15 - Время стабилизации и перерегулирование по положению в трехмерном представлении
|
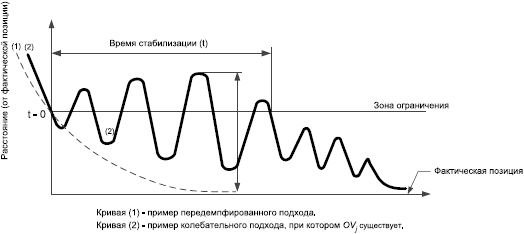
Рисунок 16 - Время стабилизации и перерегулирование по положению
Таблица 11 - Тестовые условия для времени стабилизации положения
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | P | 3 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
7.5 Перерегулирование по положению
Целью измерения перерегулирования по положению является оценка способности робота делать плавные и точные остановки в заданных позициях. Следует понимать, что перерегулирование по положению также связано со временем стабилизации положения.
Перерегулирование измеряется как максимальное расстояние от фактической позиции, пройденное роботом с момента первоначального пересечения границы зоны ограничения до того, как он снова выйдет за пределы этих границ.
Примечание - У роботов с передемпфированием (кривая 1 на рисунке 16) перерегулирование будет равно нулю.
Для измерения перерегулирования по положению робот отрабатывает такой же цикл, который описан в 7.2.1, с тестовой нагрузкой и тестовыми скоростями. Перерегулирование по положению равно превышению расстояния в точке измерения P. Перерегулирование должно быть измерено три раза, и максимальное значение из трех циклов должно быть зафиксировано (см. рисунок 16).
|
![]() , если
, если ![]() зоны ограничения, и
зоны ограничения, и
![]() , если
, если ![]() зоны ограничения.
зоны ограничения.
![]() ,
,
где i представляет число измерений, сделанных после того, как робот достиг зоны ограничения.
В особых случаях OV может также представляться своими компонентами OV, OV
, OV
.
В таблице 12 представлены тестовые условия для перерегулирования по положению.
Таблица 12 - Тестовые условия для перерегулирования по положению
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | P | 3 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
7.6 Дрейф характеристик позиционирования
Дрейф точности позиционирования (dAP) - это изменение точности позиционирования через заданное время (T). Он может быть вычислен следующим образом:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где АР определен в 7.2.1 по отношению к заданной позиции, достигнутой в холодном состоянии.
Максимальные значения должны быть зафиксированы в отчете.
Дрейф повторяемости позиционирования (dRP) - это изменение повторяемости позиционирования через заданное время (T). Он может быть вычислен следующим образом:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где RР определен в 7.2.2.
Максимальные значения должны быть зафиксированы в отчете.
В таблице 13 приведены тестовые условия для характеристик дрейфа позиционирования.
Таблица 13 - Тестовые условия для характеристик дрейфа позиционирования
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | 8 часов непрерывного зацикливания |
Измерения дрейфа должны начинаться с холодного состояния (непосредственно после подачи питания) и продолжаться в течение нескольких часов в прогретом состоянии. Должна быть выполнена следующая последовательность действий:
1) программирование цикла тестирования с включенным питанием;
2) выключение питания робота на 8 часов;
3) повторное включение питания робота и начало отработки запрограммированного автоматического цикла.
Цикл измерения. Робот запрограммирован на перемещение его механического интерфейса в точку Р, начиная из точки Р
. Все суставы должны двигаться при возвращении из
в
(10 раз).
Цикл прогрева. Все суставы должны перемещаться на расстояние не менее 70% от полного диапазона с максимально возможной скоростью (см. также таблицу 13) при последовательности возвращений из в
(10 раз). См. также диаграмму на рисунке 17. Для специальных применений могут быть выбраны другие значения.
Измерения могут быть прекращены до истечения 8 часов, если темп изменения дрейфа (dAP) за пять последовательных циклов меньше 10% от максимального темпа изменения в течение первого часа. Измерения используются для вычисления точности и повторяемости позиционирования (см. 7.2.1 и 7.2.2). Результаты оформляются в виде графика как функция времени. Время между циклами измерения должно равняться 10 минутам (программа прогрева, см. рисунки 17 и 18).
|
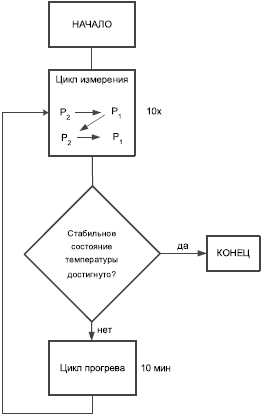
Рисунок 17 - Иллюстрация измерения дрейфа
|
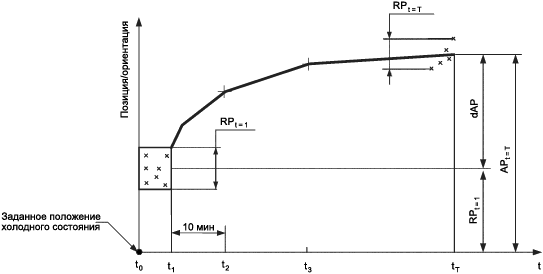
Рисунок 18 - Дрейф характеристик позиционирования
7.7 Взаимозаменяемость (Е)
Взаимозаменяемость выражает отклонение центров тяжести, когда разные роботы одного типа заменяют друг друга при тех же внешних условиях, механической установке и используемой программе работы.
Значение Е - это расстояние между центрами тяжести в результате тестирования двух роботов, у которых было зафиксировано при тестировании максимальное отклонение (см. рисунок 19).
|
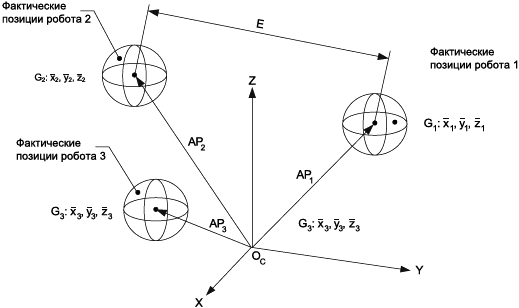
Рисунок 19 - Взаимозаменяемость
Взаимозаменяемость зависит от механических допусков, ошибок калибровки степеней подвижности и ошибок установки роботов.
Тестовыми позициями при тестировании взаимозаменяемости должны быть Р, Р
, Р
, Р
и Р
, которые должны быть одинаковыми для всех тестируемых роботов.
Заданные позиции для всех пяти точек должны быть установлены с использованием первого робота и должны оставаться такими же для других роботов во время тестирования.
Тестирование должно выполняться при 100%-ной номинальной нагрузке и 100%-ной номинальной скорости на пяти роботах одного типа.
В таблице 14 приведены тестовые условия для взаимозаменяемости.
Таблица 14 - Условия тестирования взаимозаменяемости
Нагрузка | Скорость | Позиции | Число циклов для каждого робота | Число |
100% от номинальной нагрузки | 100% от номинальной скорости | Р | 30 | 5 |
Первый робот должен быть установлен на основании так, как это указано изготовителем. Для каждой точки Р, Р
, Р
, Р
и Р
центры тяжести должны вычисляться в одной и той же базовой системе координат.
Точность позиционирования (AP) для каждого из остальных роботов должны вычисляться с использованием одинаковой конструкции основания при сохранении фиксированной измерительной системы и с использованием одной и той же программы работы.
Взаимозаменяемость вычисляется следующим образом:
| . |
Примечание - Тестирование может выполняться с одним и тем же устройством управления при использовании калибровочных данных, относящихся к каждому манипулятору (определение см. в ИСО 8373), в соответствии со спецификациями изготовителя.
8 Характеристики отработки траектории
8.1 Общие положения
Определения точности и повторяемости отработки траектории не зависят от формы заданной траектории. На рисунке 20 представлена общая иллюстрация точности и повторяемости отработки траектории.
Характеристики отработки траектории, описанные в данном разделе, обычно подходят для всех методов программирования.
|
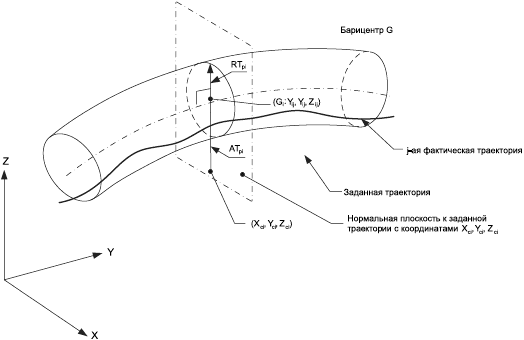
Рисунок 20 - Точность и повторяемость отработки траектории для заданной траектории
8.2 Точность отработки траектории (АТ)
Точность отработки траектории характеризует способность робота перемещать свой механический интерфейс вдоль заданной траектории в одном и том же направлении n раз.
Точность отработки траектории определяется двумя факторами:
- разницей между позициями заданной траектории и линией центра тяжести кластера позиций фактических траекторий (т.е. точность отработки траектории по положению, АТ на рисунке 20);
- разницей между заданными ориентациями и средним значением фактических ориентаций (т.е. точность отработки траектории по ориентации).
Точность отработки траектории - это максимальное отклонение фактической траектории от заданной по положению и ориентации.
Точность отработки траектории по положению (АТ) определяется как максимальное расстояние между точками на заданной траектории и положениями центров тяжести G
за n циклов измерения для каждой из расчетных точек (m) на траектории.
Точность отработки траектории по положению вычисляется следующим образом:
| , |
где ![]() ,
, ![]() ,
, ![]() .
.
При вычислении необходимо учитывать следующие факторы:
- число точек на заданной траектории и соответствующих нормальных плоскостей выбирается в зависимости от формы заданной траектории и тестовой скорости. Выбранное число нормальных плоскостей должно быть указано в отчете о тестировании;
- х, у
и z
- координаты i-й точки на заданной траектории;
- x, у
и z
- координаты пересечения j-й фактической траектории с i-й нормальной плоскостью.
Точности отработки траектории по ориентации АТ, АТ
и АТ
определяются как максимальное отклонение от заданных ориентаций вдоль траектории.
| ||
| , | |
|
где ![]() ,
, ![]() ,
, ![]() ,
,
где a, b
и c
- заданные ориентации в точке (х
, у
, z
),
а, b
и c
- фактические ориентации в точке (х
, у
и z
).
В таблице 15 представлены тестовые условия для точности отработки траектории.
Таблица 15 - Тестовые условия для точности отработки траектории
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | Линейная траектория E | 10 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; |
В то время, как расчет точности отработки траектории делается в плоскостях, ортогональных заданной траектории, измерения фактической траектории могут осуществляться как функция расстояния или времени.
Программные точки начала и конца цикла должны лежать вне выбранной тестовой траектории.
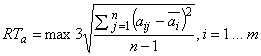
8.3 Повторяемость отработки траектории (RT)
Повторяемость отработки траектории характеризует близость фактических траекторий, отработанных n раз, к заданной траектории.
Для данной траектории, отработанной n раз в одном направлении, повторяемость отработки траектории выражается с помощью:
- RT - максимального из RT
, которые равны радиусу окружности в нормальной плоскости, центр которой расположен на линии центров тяжести (см. рисунок 20);
- максимального разброса углов относительно среднего значения в разных расчетных точках.
Повторяемость отработки траектории вычисляется следующим образом:
![]() ,
,
где ![]() ,
,
 ,
,
![]() ,
,
где ,
и
, х
, y
и z
определены как в 8.2.
 ,
,
 ,
,
 ,
,
где ,
и
, a
, b
и c
определены как в 8.2.
Повторяемость отработки траектории должна измеряться при использовании той же процедуры тестирования, что и при измерении точности отработки траектории.
Для специальных применений RT может также представляться своими компонентами RT, RT
, RT
.
8.4 Точность отработки траектории по ориентации
Чтобы зафиксировать влияние изменений ориентации в трехмерном пространстве на линейную траекторию простым способом, т.е. измеряя только точность отработки траектории по положению (АТ), должен использоваться следующий тест, проиллюстрированный на рисунке 21.
а) | b) | ||
Определение изменения | Определение изменения | ||
ориентации относительно Y | ориентации относительно Х | ||
угол В | +30° | угол А | +30° |
угол В | -30° | угол А | 0° |
угол В | +30° | угол С | -30° |
угол С | 0° | ||
угол А | -30° |
|
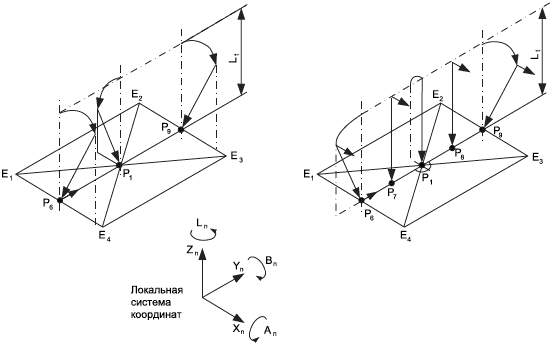
Рисунок 21 - Определение изменений ориентации относительно оси Y (а) и осей Х
и Z
(b)
На тестовой плоскости ...
, в соответствии с рисунком 4 должны быть выбраны дополнительные точки Р
... Р
, как показано на рис.6, расположенные на одинаковом расстоянии друг от друга. Локальная система координат должна быть расположена для определения ориентаций так, чтобы плоскость X
Y
была параллельна выбранной плоскости
...
, а линейная траектория Р
... Р
была бы параллельна оси Y
.
Траектория должна отрабатываться с постоянной скоростью движения центральной точки инструмента (TCP) из начальной точки Р до Р
и обратно от Р
до Р
. Ориентация должна непрерывно изменяться в областях, представленных на рис.21, без остановки в точках Р
... Р
. Скорость и нагрузка должны соответствовать 8.2 (см. также таблицу 16).
Точность отработки траектории по переориентации должна вычисляться так же, как и точность отработки траектории, определенная в 8.2.
В таблице 16 представлены тестовые условия для точности отработки траектории по переориентации.
Таблица 16 - Тестовые условия для точности отработки траектории по переориентации
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | Линейная | 10 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; | См. 8.4 и рисунки 6 и 21 |
8.5 Отклонения на поворотах
Отклонения на поворотах подразделяются на два типа:
- отклонения на крутых поворотах;
- отклонения на плавных поворотах.
Чтобы реализовать крутые повороты, изменения скорости должны поддерживать точную отработку траектории. Обычно это приводит к большим изменениям скорости. Для поддержания постоянной скорости при повороте необходимо осуществлять плавный поворот.
Крутой поворот имеет место, когда робот переходит от первой траектории без задержки по времени и с постоянной программной скоростью движения ко второй траектории, ортогональной первой.
Изменение скорости при повороте зависит от типа системы управления и должно быть зафиксировано. (В некоторых случаях снижение скорости может достигать почти 100% установленной тестовой скорости).
Плавные повороты используются для того, чтобы не допустить значительного перерегулирования при повороте и поддерживать механические напряжения конструкции в определенных пределах. В зависимости от системы управления программируются или будут автоматически использоваться дискретные траектории, например радиусы или сплайновые функции (методы сглаживания). В данном случае снижение скорости является нежелательным и, если не установлено иначе, максимально ограничено 5% от заданной тестовой скорости.
Если при программировании используется метод сглаживания, то это должно быть отражено в отчете об испытаниях.
8.5.1 Ошибка скругления при повороте (CR)
Ошибка скругления при повороте определяется как максимальное значение, рассчитанное по трем последовательным циклам измерения. На каждом цикле минимальное расстояние между угловой точкой (х, у
, z
на рисунке 22) и фактической траекторией вычисляется следующим образом:
![]() ,
,
![]() ,
,
где х, у
и z
- координаты заданной угловой точки,
х , у
и z
- координаты заданной угловой точки на фактической траектории, соответствующие i-му измерению.
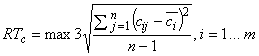
8.5.2 Перерегулирование при повороте (СО)
Перерегулирование при повороте определяется как максимальное значение, рассчитанное по трем последовательным циклам измерения. На каждом цикле измеряется максимальное отклонение от заданной траектории после того, как робот начнет отработку второй траектории без задержки по времени и с постоянной программной скоростью движения.
Если вторая заданная траектория определена вдоль оси Z, а первая заданная траектория соответствует отрицательному направлению оси Y, то перерегулирование при повороте вычисляется следующим образом:
![]() ,
,
![]() ,
,
где
и
- координаты точки на заданной траектории, соответствующие точке измерения
,
и
- координаты точки на фактической траектории, соответствующие точке измерения
.
Данное уравнение является верным только в том случае, когда (![]() ) имеет положительное значение. Если (
) имеет положительное значение. Если (![]() ) имеет отрицательное значение, то перерегулирование при повороте отсутствует.
) имеет отрицательное значение, то перерегулирование при повороте отсутствует.
|
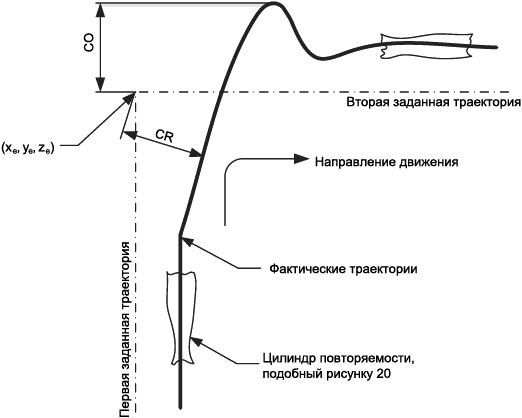
Рисунок 22 - Перерегулирование при повороте и ошибка скругления на повороте для крутого поворота
8.5.3 Общие тестовые условия
В таблице 17 представлены тестовые условия для отклонений на поворотах.
Таблица 17 - Тестовые условия для отклонений на поворотах
Нагрузка | Скорость | Углы | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; |
(см. рисунок 6 в 6.8.6.2) | 3 |
Начальная позиция должна располагаться на половине пути между и
. Должны быть измерены все четыре поворота. Для задания прямоугольной траектории должно быть использовано программирование в контурном режиме. Любое автоматическое снижение скорости при отработке траектории должно соответствовать указаниям изготовителя и должно быть отмечено в отчете и тестировании.
Если не оговорено иное, то ориентация ортогональна плоскости прямоугольной траектории.
Перерегулирование при повороте может быть рассчитано на основании измерения отклонения от заданной траектории каждой измеренной траектории. Чтобы установить параметры заданной траектории, положение угловых точек может быть либо измерено во время обучения в случае программирования обучением, либо известно в случае ручного ввода данных.
Обе характеристики CR и СО должны быть измерены в одной последовательности измерений. Любой запрограммированный альтернативный вариант (например, крутой поворот, сглаживание) должен быть отражен в отчете.
8.6 Характеристики скорости отработки траектории
8.6.1 Общее описание
Рабочие характеристики робота, касающиеся скорости отработки траектории, включают три показателя:
- точность скорости отработки траектории (AV);
- повторяемость скорости отработки траектории (RV);
- флюктуация скорости отработки траектории (FV).
Идеализированный график этих показателей показан на рисунке 23.
|
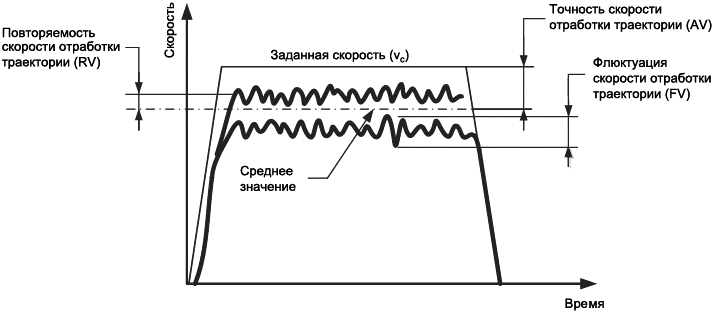
Рисунок 23 - Характеристики скорости отработки траектории
В таблице 18 представлены тестовые условия для характеристик скорости отработки траектории.
Таблица 18 - Тестовые условия для характеристик скорости отработки траектории
Нагрузка | Скорость | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости; | 10 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости; | 10 |
В случае, когда имеют место значительные флюктуации скорости при отработке траектории, повторные измерения, как функции времени, должны быть сделаны для тех же самых точек в пространстве вдоль заданной траектории.
Измерение должно производиться в состоянии стабильной скорости в центральной части длины тестовой траектории и на 50% ее длины.
Характеристики скорости отработки траектории тестируются на той же линейной траектории, которая использовалась для оценки точности отработки траектории (см. 8.2). AV, RV и FV вычисляются при n =10.
8.6.2 Точность скорости отработки траектории (AV)
Точность скорости отработки траектории определяется как ошибка между заданной скоростью и средним значением фактических скоростей, полученных во время n повторений отработки траектории, и выражается в процентах от заданной скорости. Точность скорости отработки траектории вычисляется следующим образом:
 ,
,
где ![]() ,
,
![]() ,
,
где - заданная скорость,
- фактическая скорость i-гo измерения j-гo повторения отработки траектории,
т - число измерений вдоль траектории.
8.6.3 Повторяемость скорости отработки траектории (RV)
Повторяемость скорости отработки траектории характеризует близость фактических скоростей к заданной скорости.
Если не указано иное, то повторяемость скорости отработки траектории должна быть выражена в процентах от заданной скорости.
 ,
,
где  ,
,
где,
и
определены в 8.6.2.
Повторяемость скорости отработки траектории должна быть измерена с использованием той же тестовой процедуры, что и для измерения точности скорости отработки траектории.
8.6.4 Флюктуация скорости отработки траектории (FV)
Флюктуация скорости отработки траектории характеризует максимальное отклонение скорости во время одного повторения отработки траектории при одной заданной скорости.
Флюктуация скорости отработки траектории определяется как максимальная флюктуация скорости для каждого повторения отработки траектории.
| , |
где определено в 8.6.2.
Флюктуация скорости отработки траектории должна измеряться с использованием той же тестовой процедуры, которая использовалась для измерения точности скорости отработки траектории.
9 Минимальное время позиционирования
Под временем позиционирования понимается время, прошедшее между моментами выхода из стационарного состояния и прихода в стационарное состояние при перемещении на заданное расстояние и/или повороте на заданный угол в режиме позиционного управления. Время, затраченное роботом на стабилизацию фактической позиции, определенное в 7.4 входит в общее время позиционирования.
Если не указано иное, то робот должен быть в состоянии обеспечить заданные характеристики точности и повторяемости позиционирования при перемещении между тестовыми позициями за заданное минимальное время позиционирования.
Время позиционирования является нелинейной функцией пройденного расстояния.
Примечание - Время позиционирования робота составляет часть определения времени цикла, но не является единственным фактором, определяющим время цикла. Поэтому результаты измерений времени позиционирования могут быть использованы для того, чтобы дать представление о времени цикла, но не могут быть использованы напрямую для вычисления времени цикла.
Нагрузка на механический интерфейс и скорости во время тестирования соответствуют характеристикам позиционирования, указанным в 6.6.
Скорости, используемые при тестировании, должны составлять 100% от номинальной скорости, и, кроме того, тестирование должно выполняться при оптимизированных скоростях для каждой части цикла, если это способствует достижению более короткого времени позиционирования. Использованные скорости должны быть указаны в отчете о тестировании.
Число циклов равно трем.
В таблицах 19 и 20 приведены тестовые условия для минимального времени позиционирования.
Таблица 19 - Позиции и расстояния для минимального времени позиционирования
Позиции | P | Р | Р | Р | Р | Р | P | P |
Расстояние от предыдущей позиции ( | 0 | -10 | +20 | -50 | +100 | -200 | +500 | -1000 |
Таблица 20 - Тестовые условия для минимального времени позиционирования
Нагрузка | Скорость | Позиции | Число циклов |
100% от номинальной нагрузки | 100% от номинальной скорости. Оптимизированные скорости | P | 3 |
Масса номинальной нагрузки снижена до 10% (факультативно) | 100% от номинальной скорости. Оптимизированные скорости | 3 |
Для того, чтобы включить короткие расстояния для измерения времени позиционирования, число позиций программируется или обучается вдоль диагонали куба, определенного в 6.8.4, с центром в точке P. Расстояния по компонентам
![]() между последовательными позициями изменяются в знакопеременном порядке, как показано в таблице 19. См. также рисунок 24.
между последовательными позициями изменяются в знакопеременном порядке, как показано в таблице 19. См. также рисунок 24.
Число позиций и расстояния зависят от размера выбранного куба.
Для каждого прохода вычисляется среднее значение по трем циклам, а результаты проводят в таблице с указанием расстояния между позициями.
|
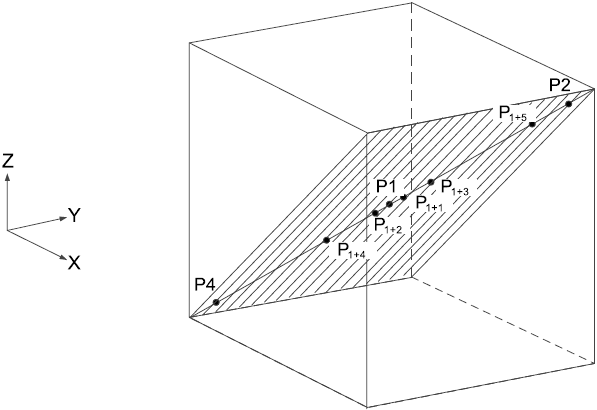
Рисунок 24 - Иллюстрация цикла
10 Статическая податливость
Под статической податливостью понимается максимальная величина смещения на единицу приложенной нагрузки. Нагрузка должна прикладываться к механическому интерфейсу, и на нем же должно измеряться смещение.
Статическая податливость должна быть выражена в миллиметрах на ньютон относительно базовой системы координат.
Используемые при тестировании силы должны быть приложены в трех направлениях, как положительных, так и отрицательных, параллельных осям базовой системы координат.
Силы должны возрастать по шагам, равным 10% от номинальной нагрузки, до достижения 100% от номинальной нагрузки по одному направлению за один раз. Для каждой силы и направления измеряется соответствующее смещение.
Измерение должно быть произведено с включенным сервоприводом и выключенными тормозами.
Процедура измерения повторяется три раза для каждого направления. Тестирование производится в центре механического интерфейса, расположенного в точке Р, как определено в 6.8.4.
11 Рабочие характеристики, специфичные для области применения
11.1 Отклонения при поперечных перемещениях
К рабочим характеристикам робота, связанным с отклонениями при поперечных перемещениях, относятся:
- ошибка хода поперечного перемещения (WS);
- ошибка частоты поперечного перемещения (WF).
Поперечное перемещение представляет собой комбинацию одного или нескольких перемещений, наложенных на траекторию движения, и характерно, главным образом, для дуговой сварки.
11.1.1 Тестовая траектория поперечного перемещения
Траектория, показанная на рисунке 25, является пилообразной траекторией с заданным ходом поперечного перемещения и расстоянием между поперечными перемещениями
, генерируемым с заданной частотой поперечного перемещения
, которые указываются изготовителем. Не менее 10 расстояний между поперечными перемещениями должно быть расположено на выбранной плоскости в соответствии с рисунками 25 и 26 с точкой P
, выбранной в качестве точки симметрии, и центральной линией, параллельной Р
-Р
.
|
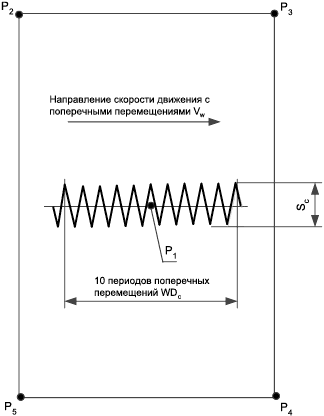
Рисунок 25 - Тестовая траектория поперечного перемещения в выбранной плоскости
11.1.2 Ошибка хода поперечного перемещения (WS)
Ошибка хода поперечного перемещения (в процентах) должна рассчитываться как разность между заданным ходом поперечного перемещения и измеренным средним значением фактического хода поперечного перемещения
следующим образом (см. рисунок 26):
| . |
11.1.3 Ошибка частоты поперечного перемещения (WF)
Ошибка частоты поперечного перемещения (в процентах) должна рассчитываться как разность между заданной частотой поперечного перемещения и фактической частотой поперечного перемещения
следующим образом:
| , |
где ![]() и
и ![]() ,
,
- заданная скорость движения с поперечными перемещениями,
- фактическая скорость движения с поперечными перемещениями,
- заданный период поперечных перемещений,
- среднее значение фактического периода поперечных перемещений.
|
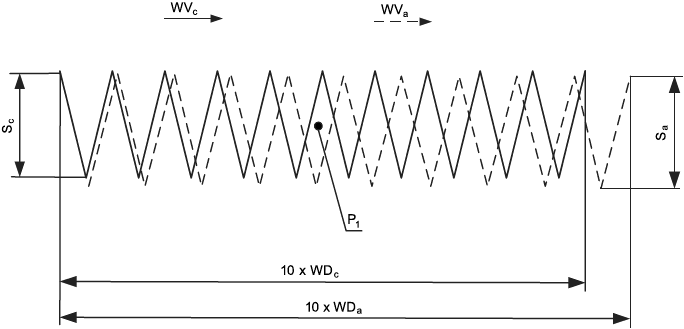
Рисунок 26 - Иллюстрация фактической и заданной траекторий поперечного перемещения
12 Отчет о тестировании
Отчет о тестировании должен состоять из титульного листа и одного или нескольких листов с результатами тестирования. Титульный лист должен содержать общую информацию, относящуюся к роботу, средствам измерения и тестовым условиям (внешняя среда, установка/прогрев, оснащение, метод программирования и т.д.), а также выполненным тестам. Листы с результатами тестирования должны содержать итоги разных тестов, выполненных с определенной погрешностью измерения.
Все отчеты должны включать все программы и параметры программного обеспечения, использованные при выполнении каждого теста.
В приложении С приведен пример отчета о тестировании, в котором показана минимально необходимая информация для титульного листа и листов с результатами.
Приложение А
(обязательное)
Параметры для сравнительных тестов
А.1 Данное приложение содержит конкретные параметры для проведения сравнительных тестов типичных характеристик позиционирования и отработки траектории.
Для сравнительных тестов характеристик, перечисленных в таблице А.1, должны применяться параметры размеров куба, плоскостей, нагрузок, скоростей и форм траекторий, установленные в данном приложении, если только другие значения не согласованы между поставщиком и пользователем. В таблице 1 приведена также информация о конкретных параметрах тестов, которая не определена где-либо еще в данном приложении.
Если конкретные параметры не указаны в данном приложении, то должны применяться тестовые условия и параметры, определенные в основной части настоящего стандарта, например, позиции расположения, число циклов.
Сравнение характеристик правомерно только в том случае, если внешние противодействующие силы по отношению к рабочему органу незначительны.
Таблица А.1 - Перечень характеристик
Характеристики, подлежащие тестированию | Примечание |
Точность и повторяемость позиционирования | |
Разнонаправленное изменение точности позиционирования | |
Точность и повторяемость отработки расстояния | |
Время стабилизации положения | |
Перерегулирование по положению | |
Дрейф характеристик позиционирования | |
Точность отработки траектории по положению | Длина тестовых линейных траекторий определяется размером выбранного куба в соответствии с принципами, изложенными в 6.8.2 |
Точность отработки траектории по переориентации | Длина тестовых линейных траекторий определяется размером выбранного куба в соответствии с принципами, изложенными в 6.8.2 |
Отклонения при повороте (крутой поворот) | |
Скорость отработки траектории | |
Минимальное время позиционирования | |
Статическая податливость | |
Поперечные перемещения |
|
А.2 Размер куба и выбор тестовой плоскости
Если не указано иное, должен быть использован максимально возможный куб с длинами сторон 250, 400, 630 или 1000 мм. Центр выбранного куба (Р, см. 6.8.4 и рисунок 4) должен располагаться в том же месте, что и центр куба с максимально возможным объемом, а также с ребрами, параллельными базовой системе координат. Положение куба относительно базовой системы координат робота должно быть указано в отчете о тестировании.
Должна использоваться плоскость (а) -
-
-
, изображенная на рисунке 2.
Для роботов, имеющих менее шести степеней подвижности, должны использоваться плоскости 2, 3 или 4, изображенные на рисунке 5.
А.3 Нагрузка на механический интерфейс
Все тесты должны выполняться с максимально большой тестовой нагрузкой в соответствии с таблицей А.2, а также факультативно с нагрузкой равной 10% от данной тестовой нагрузки. Осевое смещение CG (центра тяжести), радиальное смещение CG и осевое смещение МР (точки измерения) показаны на рисунке 3.
Таблица А.2 - Категории стандартных тестовых нагрузок (CG - центр тяжести; МР - точка измерения)
Категория тестовой нагрузки | Масса (кг) | Осевое смещение CG L | Радиальные смещения CG и МР L | Осевое смещение MP Z |
1 | 1 | 20 | 0 | 40 |
2 | 2 | 40 | 20 | 80 |
3 | 5 | 60 | 30 | 120 |
4 | 10 | 80 | 40 | 160 |
5 | 20 | 100 | 50 | 200 |
6 | 40 | 120 | 60 | 240 |
7 | 60 | 140 | 70 | 280 |
8 | 80 | 160 | 80 | 320 |
9 | 100 | 180 | 90 | 360 |
10 | 120 | 200 | 100 | 400 |
11 | 140 | 220 | 110 | 440 |
А.4 Тестовые скорости
Характеристики позиционирования должны тестироваться со скоростями, указанными в таблице А.3. Если скорости 1600 мм/с достичь невозможно, то должна использоваться скорость 630 мм/с. Зона ограничения из таблицы А.3 описана в 7.4 и 7.5.
Характеристики отработки траектории должны тестироваться со скоростями, указанными в таблице А.4.
Таблица А.3 - Тестовые скорости для характеристик позиционирования
Характеристики, подлежащие тестированию | Скорость | |||||||||||
Низкая | Высокая | |||||||||||
10 мм/с | 250 мм/с | 630 мм/с | 1600 мм/с | |||||||||
Зона ограничения | Зона ограничения | Зона ограничения | Зона ограничения | |||||||||
0,1 | 0,5 | 1,0 | 0,1 | 0,5 | 1,0 | 0,1 | 0,5 | 1,0 | 0,1 | 0,5 | 1,0 | |
Время стабилизации положения | О | О | О | О | О | О | О | О | О | X | X | X |
Перерегулирование по положению | О | О | О | О | О | О | О | О | О | X | X | X |
Минимальное время позиционирования | О | О | О | О | О | О | О | О | О | X | X | X |
10 мм/с | 250 мм/с | 630 мм/с | 1600 мм/с | |||||||||
Точность и повторяемость позиционирования | X | О | О | X | ||||||||
Разнонаправленное изменение точности позиционирования | X | О | О | X | ||||||||
Точность и повторяемость отработки расстояния | X | О | О | X | ||||||||
X - обязательно; О - необязательно.
Примечание - Один вид зоны ограничения может быть выбран из трех значений на скорости 1600 мм/с.
Таблица А.4 - Тестовые скорости для характеристик отработки траектории
Характеристики, подлежащие тестированию | Скорость | |||
Низкая | Высокая | |||
10 мм/с | 250 мм/с | 630 мм/с | 1600 мм/с | |
Точность отработки траектории по положению | X | X | О | X |
Точность отработки траектории по переориентации | X | X | О | X |
Отклонение при крутом повороте | - | X | О | X |
Характеристики скорости отработки траектории | X | X | О | X |
Отклонение при поперечных перемещениях | X | О | - | - |
X - обязательно; О - необязательно.
Низкая скорость применяется для таких областей применения, как сварка, резка, полировка/удаление заусенец. Высокая скорость применяется для таких областей применения, как окраска распылением, нанесение уплотнителя.
А.5 Форма и размер дополнительной тестовой траектории
Тестовая траектория, показанная на рисунке А.1 является дополнительной с разными элементами траектории, которая может быть использована для тестов точности отработки траектории по положению. Координаты точек Р и от Р
до Р
приведены в таблице А.5 как примеры для плоскостей размеров 400х400 мм и 800x800 мм.
|
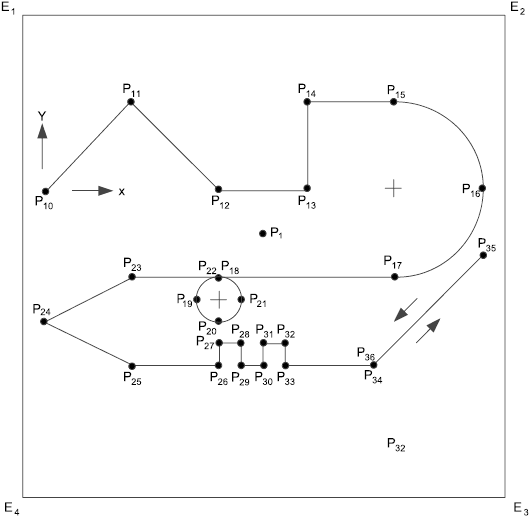
Рисунок А.1 - Дополнительная тестовая траектория
Таблица А.5 - Координаты точек на дополнительной тестовой траектории
Точка | Плоскость 400х400 мм | Плоскость 800х800 мм | ||
X | Y | X | Y | |
1 | 180 | -50 | 360 | -100 |
10 | 0 | 0 | 0 | 0 |
11 | 70 | 70 | 140 | 140 |
12 | 140 | 0 | 280 | 0 |
13 | 210 | 0 | 420 | 0 |
14 | 210 | 70 | 420 | 140 |
15 | 280 | 70 | 560 | 140 |
16 | 360 | -10 | 720 | -20 |
17 | 280 | -90 | 560 | -180 |
18 | 140 | -90 | 280 | -180 |
19 | 120 | -110 | 240 | -220 |
20 | 140 | -130 | 280 | -260 |
21 | 160 | -110 | 320 | -220 |
22 | 140 | -90 | 280 | -180 |
23 | 70 | -90 | 140 | -180 |
24 | 0 | -130 | 0 | -260 |
25 | 70 | -170 | 140 | -340 |
26 | 140 | -170 | 280 | -340 |
27 | 140 | -160 | 280 | -320 |
28 | 150 | -160 | 300 | -320 |
29 | 150 | -170 | 300 | -340 |
30 | 160 | -170 | 320 | -340 |
31 | 160 | -160 | 320 | -320 |
32 | 170 | -160 | 340 | -320 |
33 | 170 | -170 | 340 | -340 |
34 | 260 | -170 | 520 | -340 |
35 | 360 | -70 | 720 | -140 |
36 | 260 | -170 | 520 | -340 |
Приложение В
(справочное)
Руководство по выбору рабочих характеристик для типичных применений
В.1 Введение
Во введении и в 6.11 сказано, что описанные тесты могут применяться полностью или по частям в зависимости от типа робота и требований к нему. Выбор тестов предоставляется пользователю настоящего стандарта в соответствии с его собственными конкретными требованиями.
Целью данного приложения является предоставить руководство по выбору необходимых тестов для некоторых типичных применений роботов. Следовательно, число тестов может быть ограничено.
В таблице В.1 приведен перечень некоторых типичных применений роботов, а необходимые тесты для разных применений обозначены символом "х".
Примечания к таблице В.1:
1) - Применение, для которого обычно используется позиционное управление.
2) - Применение, для которого обычно используется контурное управление.
3) - Только для программирования в автономном режиме.
4) - Только позиция.
Таблица В.1 - Руководство по выбору критериев рабочих характеристик типичных применений
Используемая | Ссылка на настоящий стандарт | Применения | |||||||||
Точечная | Переме- | Сборка | Контроль | Механо- | Окраска | Дуговая | Адгезия/ | ||||
Точность позиционирования | 7.2.1 | Х | Х | Х | Х | Х | Х | Х | |||
Повторяемость позиционирования | 7.2.2 | Х | Х | Х | Х | Х | Х | Х | |||
Разнонаправленное изменение точности позиционирования | 7.2.3 | Х | Х | Х | Х | Х | |||||
Точность/ | 7.3 | Х | Х | Х | Х | Х | Х | ||||
Время стабилизации положения | 7.4 | X | X | X | X | X | X | ||||
Перерегулирование по положению | 7.5 | X | X | X | X | X | X | X | |||
Дрейф точности позиционирования | 7.6 | Х | Х | Х | Х | Х | Х | Х | |||
Дрейф повторяемости позиционирования | 7.6 | Х | Х | Х | Х | Х | Х | Х | |||
Взаимозаменяемость | 7.7 | ||||||||||
Точность отработки траектории | 8.2 | Х | Х | Х | Х | Х | Х | ||||
Повторяемость отработки траектории | 8.3 | Х | Х | Х | Х | Х | Х | ||||
Точность отработки траектории по переориентации | 8.4 | ||||||||||
Отклонения при поворотах | 8.5 | X | X | X | X | ||||||
Точность скорости отработки траектории | 8.6.2 | Х | Х | Х | Х | ||||||
Повторяемость скорости отработки траектории | 8.6.3 | X | X | X | X | ||||||
Флюктуация скорости отработки траектории | 8.6.4 | X | X | X | X | ||||||
Минимальное время позиционирования | 9 | X | X | X | |||||||
Статическая податливость | 10 | X | X | X | X | X | |||||
Отклонения при поперечных перемещениях | 11.1 | X | |||||||||
Приложение С
(справочное)
Пример отчета о тестировании
РОБОТ | Система управления | ||||||||||||||||||||||||||||||||
Изготовитель: | |||||||||||||||||||||||||||||||||
Тип: | |||||||||||||||||||||||||||||||||
Модель N | |||||||||||||||||||||||||||||||||
Серийный N | |||||||||||||||||||||||||||||||||
Установочная ориентация: | |||||||||||||||||||||||||||||||||
Версия программного обеспечения: | |||||||||||||||||||||||||||||||||
Метод программирования: | |||||||||||||||||||||||||||||||||
Место проведения тестирования: | |||||||||||||||||||||||||||||||||
Внешняя среда | |||||||||||||||||||||||||||||||||
Температура окружающего воздуха: | |||||||||||||||||||||||||||||||||
Ненормальные условия: | (см. примечание) | ||||||||||||||||||||||||||||||||
Примечание - Комментарии по условиям, выходящим за ожидаемые границы. | |||||||||||||||||||||||||||||||||
Время прогрева: | Время измерения: | ||||||||||||||||||||||||||||||||
Перерыв в измерениях: | |||||||||||||||||||||||||||||||||
Приборы | |||||||||||||||||||||||||||||||||
Тип: | Модель N: | Серийный N: | |||||||||||||||||||||||||||||||
Комментарии: | |||||||||||||||||||||||||||||||||
Тестовые условия |
| ||||||||||||||||||||||||||||||||
Номинальные нагрузочные условия: | |||||||||||||||||||||||||||||||||
Масса (кг) | Позиция центра тяжести (координаты L | ||||||||||||||||||||||||||||||||
Моменты инерции (кг/м | Позиция точки измерения (координаты Х | ||||||||||||||||||||||||||||||||
Тесты, проведенные в соответствии с ИСО 9283 | |||||||||||||||||||||||||||||||||
Точность позиционирования | Точность и повторяемость отработки траектории | ||||||||||||||||||||||||||||||||
Повторяемость позиционирования | Точность отработки траектории по переориентации | ||||||||||||||||||||||||||||||||
Разнонаправленное изменение точности | Отклонения при поворотах | ||||||||||||||||||||||||||||||||
позиционирования | |||||||||||||||||||||||||||||||||
Точность, повторяемость и флюктуация | |||||||||||||||||||||||||||||||||
Точность и повторяемость отработки | скорости отработки траектории | ||||||||||||||||||||||||||||||||
расстояния | |||||||||||||||||||||||||||||||||
Минимальное время позиционирования | |||||||||||||||||||||||||||||||||
Время стабилизации положения | |||||||||||||||||||||||||||||||||
Статическая податливость | |||||||||||||||||||||||||||||||||
Перерегулирование по положению | |||||||||||||||||||||||||||||||||
Отклонения при поперечных перемещениях | |||||||||||||||||||||||||||||||||
Дрейф характеристик позиционирования | |||||||||||||||||||||||||||||||||
Взаимозаменяемость | |||||||||||||||||||||||||||||||||
Выполнил: | Дата: | ||||||||||||||||||||||||||||||||
Проверил: | Дата: | ||||||||||||||||||||||||||||||||
Таблицы для результатов тестирования
Примечание - Приведенные ниже таблицы являются только примером.
Таблица С.1 - Точность и повторяемость позиционирования
Нагрузка | Скорость | P | P | P | P | P | ||
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения |
|
|
|
| |||
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения |
|
| ... | ... | |||
Таблица С.2 - Разнонаправленное изменение точности позиционирования
Нагрузка | Скорость | Р | P | P |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения |
|
| ... |
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения |
| ... | ... |
Таблица С.3 - Точность и повторяемость отработки расстояния
Нагрузка | Скорость | Р | P | ||
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения |
|
| ||
Метод программирования: | |||||
Таблица С.4 - Время стабилизации положения и перерегулирование по положению
Нагрузка | Скорость | P | Зона ограничения |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения | t = | Заданное ограничение: |
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.3 в случае сравнения | t = | Заданное ограничение: |
Таблица С.5 - Взаимозаменяемость
Нагрузка | Скорость | Взаимозаменяемость |
100% согласно 6.6 | 100% согласно 6.7 | Е= |
Таблица С.6 - Точность и повторяемость отработки траектории
Нагрузка | Скорость | Выбранные форма и длина траектории | Точность | Повторяе- | Точность при переориен- |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения |
|
|
| |
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения |
|
|
|
Таблица С.7 - Отклонения при поворотах
Нагрузка | Номинальная | Уменьшенная | Перерегу- | Ошибка |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения | СО= | CR= | |
Максимальная номинальная скорость отработки траектории | м/с | |||
Максимальное снижение скорости отработки траектории при повороте | м/с | |||
Расстояния от поворота, где снижение скорости началось и закончилось | мм | |||
Таблица С.8 - Точность, повторяемость и флюктуация скорости отработки траектории
Нагрузка | Скорость | Точность | Повторяемость | Флюктуация |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения | AV = % | RV = % | FV = % |
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения | AV = % | RV = % | FV = % |
Таблица С.9 - Минимальное время позиционирования
Начальная позиция | Конечная позиция | Расстояние, мм | Время, с |
Использованные скорости: | |||
Таблица С.10 - Статическая податливость
Направление и ощущение усилия | Х | X | Y | Y | Z | Z |
Величина усилия | ... Н | ... Н | ... Н | ... Н | ... Н | ... Н |
Податливость | ... мм/Н | ... мм/Н | ... мм/Н | ... мм/Н | ... мм/Н | ... мм/Н |
Таблица С.11 - Отклонения при поперечных перемещениях
Нагрузка | Скорость | Ошибка хода при поперечном перемещении | Ошибка частоты при поперечном перемещении |
100% согласно 6.6 или максимальная из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения | WS = % | WF = % |
10% согласно 6.6 или 10% от максимальной из таблицы А.2 в случае сравнения | 100% и 50% и/или 10% согласно 6.7 или высокая и низкая из таблицы А.4 в случае сравнения | WS = % | WF = % |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 8373:1994 | - | *, |
________________
| ||
ISO 9787:1990 | - | *, |
________________
| ||
ISO 9946:1991 | - | *, |
________________
| ||
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
УДК 656.865.8:006.354 | ОКС 25.040.30 |
Ключевые слова: робототехнические устройства, манипуляторы, промышленные роботы, спецификации, характеристики, тесты, тесты характеристик | |
Электронный текст документа
и сверен по:
, 2020
{kind=link}