ГОСТ Р 60.3.1.1-2016/ИСО 9946:1999
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы промышленные манипуляционные
ПРЕДСТАВЛЕНИЕ ХАРАКТЕРИСТИК
Manipulating industrial robots. Presentation of characteristics
ОКС 25.040.30
Дата введения 2018-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным бюджетным учреждением "Консультационно-внедренческая фирма в области международной стандартизации и сертификации "Фирма "ИНТЕРСТАНДАРТ" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 30 ноября 2016 г. N 1865-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 9946:1999* "Роботы промышленные манипуляционные. Представление характеристик" (ISO 9946:1999 "Manipulating industrial robots - Presentation of characteristics", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ИЗДАНИЕ (сентябрь 2020 г.) с Поправкой (ИУС 7-2017)
Правила применения настоящего стандарта установлены в статье 26 Федерального закона 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт является частью комплекса международных стандартов, относящихся к промышленным манипуляционным роботам. Другие стандарты комплекса охватывают такие темы, как безопасность, рабочие характеристики и соответствующие методы тестирования, системы координат, терминологию и механические интерфейсы. Необходимо отметить, что эти стандарты являются взаимосвязанными, а также связанными с другими международными стандартами.
Число промышленных манипуляционных роботов, используемых в производственной среде, постоянно возрастает, что подчеркивает необходимость стандартного формата для спецификации и представления характеристик роботов.
Целью настоящего стандарта является помочь пользователям и изготовителям в понимании и сравнении разных типов роботов.
ИСО 11593:1996 содержит словарь и формат представления характеристик систем автоматической смены рабочего органа.
Приложение А настоящего стандарта содержит рекомендуемый формат представления спецификации робота.
Приложение В содержит описание обозначений рабочих характеристик.
Примечание - Для целей настоящего стандарта термин "робот" означает "промышленный манипуляционный робот".
1 Область применения
Настоящий стандарт определяет, как характеристики роботов должны быть представлены изготовителем.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 8373:1994, Robots and robotic devices - Vocabulary (Роботы и робототехнические устройства. Термины и определения)
______________________
Заменен на ISO 8373:2012.
ISO 9283:1998, Manipulating industrial robots - Performance criteria and related test methods (Промышленные манипуляционные роботы. Рабочие характеристики и соответствующие способы тестирования)
ISO 9409-1:1996), Manipulating industrial robots - Mechanical interfaces - Part 1: Plates (form A) (Промышленные манипуляционные роботы. Механические интерфейсы. Часть 1. Круглые фланцы (форма А))
______________________
Заменен на ISO 9409-1:2004.
ISO 9787, Manipulating industrial robots - Coordinate systems and motion nomenclatures (Промышленные манипуляционные роботы. Системы координат и типы перемещений)
ISO 10218:1992, Manipulating industrial robots - Safety (Промышленные манипуляционные роботы. Безопасность)
______________________
Заменен на ISO 10218-1:2011, ISO 10218-2:2011.
3 Термины и определения
В настоящем документе применены термины по ИСО 8373, а также следующий термин с соответствующим определением:
3.1 центр рабочей зоны (centre of the working space, Cw): Положение начала координат кисти, когда каждый управляемый шарнир манипулятора находится в среднем положении относительно всего диапазона его перемещения.
4 Единицы измерения
В настоящем стандарте, если иное не оговорено особо, использованы следующие единицы измерения:
- длина в миллиметрах, мм;
- углы в радианах, рад или градусах, °;
- время в секундах, с;
- масса в килограммах, кг;
- сила в ньютонах, Н;
- скорость в метрах в секунду, м/с, радианах в секунду, рад/с, или градусах в секунду, °/с.
5 Характеристики
5.1 Общие положения
Изготовитель должен предоставить как часть документации на робот, информацию, относящуюся к различным характеристикам и требованиям, установленную в данном разделе.
5.2 Назначение
Изготовитель должен указать основной вид (виды) применения (применений), для которого предназначен данный робот.
Типичными видами применений являются:
- перемещение;
- сборка;
- точечная сварка;
- дуговая сварка;
- механообработка;
- окраска распылением;
- адгезия/уплотнение;
- контроль.
5.3 Источник питания
Изготовитель должен указать все внешние источники питания, включая их тип (например, электрический, гидравлический, пневматический или комбинированный), необходимые для нормальной работы робота (например, для приводов, системы управления, вспомогательного оборудования, такого как захватное устройство) с указанием максимального потребления энергии каждым из них. Кроме того, должны быть указаны допустимые амплитуды и пульсации источников питания.
Изготовитель должен также указать вид энергии, используемой для управления степенями подвижности и вспомогательными движениями (например, электрическая, гидравлическая, пневматическая). В том случае, если используется более одного вида энергии, изготовитель должен включить схему деления на отдельные движения.
5.4 Механическая конструкция
Изготовитель должен указать тип механической конструкции и число степеней подвижности. Должен быть приведен схематический чертеж, поясняющий движения по степеням подвижности. Данный чертеж может быть частью чертежа, представляющего рабочую зону робота (см. 5.5).
Примерами механических конструкций являются:
- робот с прямоугольной системой координат;
- робот с цилиндрической системой координат;
- робот с полярной системой координат;
- робот с угловой системой координат (шарнирный робот).
Для мобильного робота должен быть указан способ управления движением по маршруту.
5.5 Рабочая зона
Границы рабочей зоны начала координат кисти, включая начальное расположение и центр рабочей зоны (), должны быть показаны на чертеже, по крайней мере, с двумя видами [один из видов представляет проекцию геометрического места точек, максимально достижимых манипулятором робота, на плоскость
-
базовой системы координат (см. ИСО 9787), а второй - проекцию геометрического места точек, максимально достижимых манипулятором робота, на плоскость
-
базовой системы координат]. Кроме того, на чертеже должна быть показана информация о любом ограничении движения вторичных степеней подвижности в любой точке (точках) рабочей зоны начала координат кисти (на рисунке 1 показан пример чертежа для 5-степенного робота, а на рисунке 2 - для 6-степенного робота).
Рекомендуется, чтобы параметры рабочей зоны и диапазоны перемещения вторичных степеней подвижности были приведены на данном чертеже в табличной форме, как показано на рисунках 1 и 2.
|
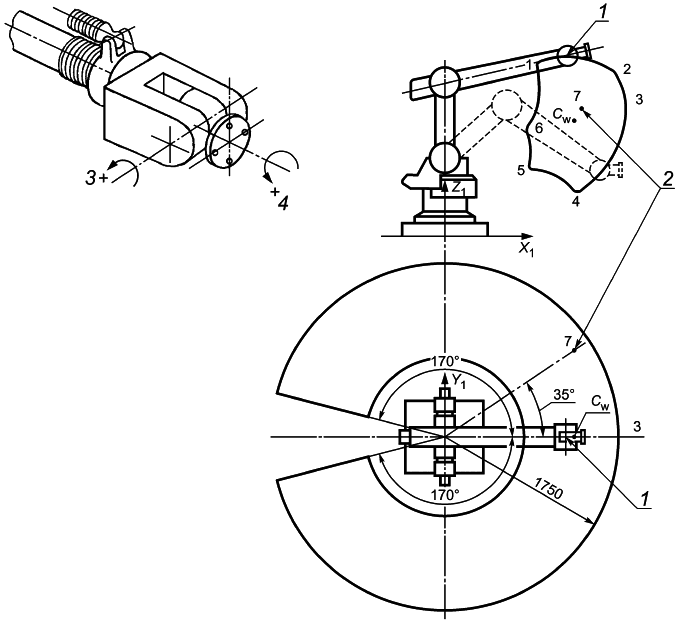
1 - начало координат кисти; 2 - начальное расположение; 3 - 4-я степень подвижности; 4 - 5-я степень подвижности.
Точка на чертеже | Рабочая зона начала координат кисти | Диапазон перемещения по вторичным степеням подвижности | ||
|
| 4-я | 5-я | |
1 | 925 | 1635 | От +75° до -90° | От +170° до -150° |
2 | 1610 | 1550 | От +75° до -90° | ±180° |
3 | 1750 | 1140 | От +75° до -105° | ±180° |
4 | 1310 | 345 | От +45° до -120° | ±180° |
5 | 870 | 600 | От +45° до -120° | От +150° до -170° |
6 | 840 | 1000 | От +75° до -120° | От +140° до - 150° |
7 | 1350 | 750 | - | - |
Рисунок 1 - Пример рабочей зоны пятистепенного робота
|
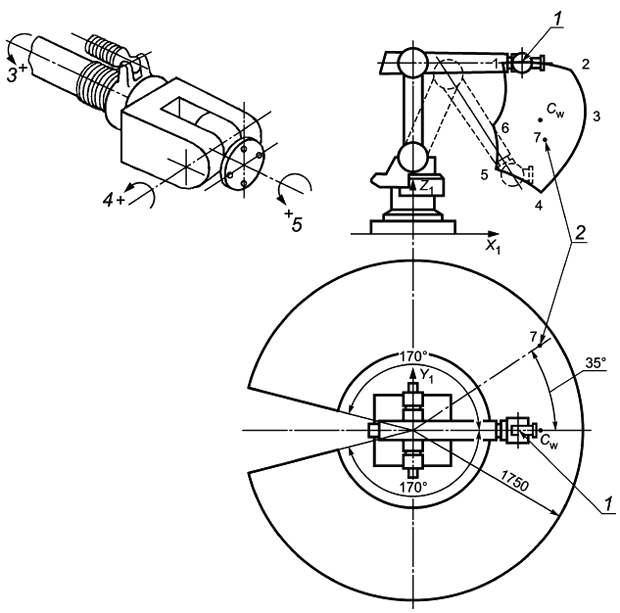
1 - начало координат кисти; 2 - начальное расположение; 3 - 4-я степень подвижности; 4 - 5-я степень подвижности; 5 - 6-я степень подвижности
Точка на чертеже | Рабочая зона начала координат кисти | Диапазон перемещения по вторичным степеням подвижности | |||
|
| 4-я | 5-я | 6-я | |
1 | 925 | 1635 | ±210° | От +75° до -90° | От +170° до -150° |
2 | 1610 | 1550 | ±210° | От +75° до -90° | ±180° |
3 | 1750 | 1140 | ±210° | От +75° до -105° | ±180° |
4 | 1310 | 345 | ±210° | От +45° до -120° | ±180° |
5 | 870 | 600 | ±210° | От +45° до -120° | От +150° до -170° |
6 | 840 | 1000 | ±210° | От +75° до -120° | От +140° до -150° |
7 | 1350 | 750 | - | - | - |
Рисунок 2 - Пример рабочей зоны шестистепенного робота
5.6 Система координат
Изготовитель должен определить базовую систему координат и систему координат механического интерфейса в соответствии с ИСО 9787. Любые отклонения от ИСО 9787 должны быть указаны изготовителем.
5.7 Внешние габариты и масса
Изготовитель должен указать внешние габариты в миллиметрах (мм) и массу в килограммах (кг) механической конструкции и устройства управления.
5.8 Базовая установочная поверхность
Изготовитель должен предоставить описание установочной поверхности основания робота (например, в виде чертежа) и рекомендации по его монтажу, необходимые для обеспечения безопасной работы и достижения номинальных характеристик.
Допустимые установочные положения и ориентации робота должны быть определены наряду с любыми ограничениями по безопасности или характеристикам относительно каждого положения и ориентации.
5.9 Механический интерфейс
Изготовитель должен предоставить описание механического интерфейса, включая любые чертежи, спецификации и рекомендации, необходимые для монтажа рабочего органа на кисти робота. В подходящих случаях должны быть даны ссылки на соответствующие стандарты (например, на ИСО 9409-1).
5.10 Управление
Изготовитель должен указать следующие данные:
- Тип устройства управления и вся сопутствующая информация, например его характеристики, особые документы (например, схемы управления).
- Объем памяти рабочей программы:
- основной объем;
- максимальный объем.
- Метод управления движением:
- позиционный (PTP);
- контурный (CP).
- Тип управления движением:
- сервосистема;
- без сервосистемы.
- Метод интерполяции траектории:
- линейный;
- круговой;
- параболический;
- другой.
- Число управляемых степеней подвижности:
- основное число степеней подвижности;
- дополнительное число степеней подвижности (с интерполяцией);
- дополнительное число степеней подвижности (без интерполяции).
- Пульт или органы управления.
- Интерфейсы ввода/вывода:
- типы и уровни сигналов;
- непрерывный или мультиплексорный сигнал.
- Интерфейсы данных:
- форматы данных и форматы управления.
- Сетевые интерфейсы:
- физические характеристики;
- коммуникационные протоколы.
5.11 Программирование задания и загрузка программы
Изготовитель должен указать метод программирования задания и средства, используемые для загрузки программы.
5.11.1 Примеры методов программирования
Ручной ввод данных.
Обучение:
- проведение рабочего органа робота по нужной траектории вручную;
- проведение робота по механическому моделирующему устройству вручную;
- программирование с помощью пульта обучения вручную.
- Автономное.
- Целенаправленное.
5.11.2 Примеры средств загрузки программы
- Каналы передачи данных.
- Диски.
- Ленты.
- Карты памяти.
5.12 Внешняя среда
Изготовитель должен указать границы параметров внешней среды, при которых могут быть обеспечены номинальные характеристики, или степень защиты робота от воздействия внешней среды.
Изготовитель должен указать границы параметров внешней среды при хранении и безопасной работе, если они различаются.
Параметры внешней среды включают, но не обязательно ограничиваются следующим:
- температура (работы и хранения/транспортировки) (в градусах Цельсия) (°С);
- относительная влажность (в процентах) (%);
- ограничение по высоте над уровнем моря (в метрах) (м);
- электромагнитные помехи;
- загрязнения атмосферы;
- вибрации.
5.13 Нагрузка
Различные нагрузочные характеристики должны быть указаны в следующих терминах:
- масса (в килограммах) (кг);
- усилие (в ньютонах) (Н);
- момент (в ньютон-метрах) (Н·м).
Данные величины должны быть определены относительно системы координат механического интерфейса.
Изготовитель должен указать номинальную грузоподъемность робота. Рекомендуется, чтобы соотношение между максимальной массой и положением центра тяжести масс было показано, как на рисунке 3.
Если требуется, изготовитель должен указать любое ограничение нагрузки и какое влияние она оказывает на другие заявленные характеристики и условия (например, скорость, ускорение). Если робот может переносить некоторую дополнительную массу (например, массу на руке), то это должно быть указано.
Если требуется, изготовитель должен указать максимальное усилие и максимальный момент (см. рисунок 4). Если усилие и момент зависят от конфигурации робота, то это должно быть указано.
5.14 Скорость
Если не указано иное, изготовитель должен определить скорость при следующих условиях:
- при постоянном расстоянии на единицу времени при отсутствии ускорения и замедления;
- при номинальной нагрузке.
Изготовитель должен указать, по крайней мере, следующие значения:
- максимальную скорость по каждой степени подвижности;
- номинальную скорость движения по траектории с указанием формы траектории и соответствующих рабочих характеристик.
5.15 Разрешающая способность
Для степеней подвижности с сервоуправлением изготовитель должен указать разрешающую способность по каждой степени подвижности в миллиметрах, радианах или градусах.
|
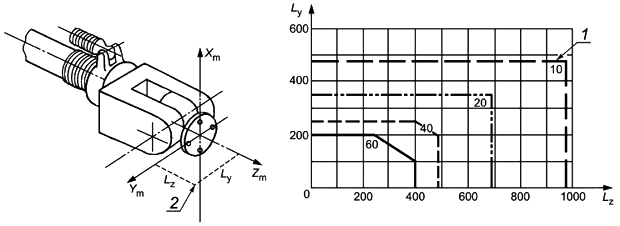
1 - масса (кг); 2 - центр тяжести масс
Рисунок 3 - Схема распределения нагрузок
|
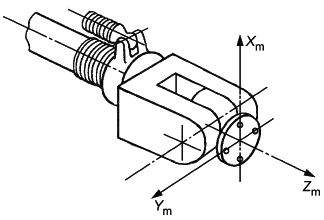
Координатная ось | Усилие, Н | Момент, Н·м |
Рисунок 4 - Значения усилий и моментов
5.16 Рабочие характеристики
Изготовитель должен привести информацию в соответствии с ИСО 9283 по тем рабочим характеристикам которые он гарантирует. К рабочим характеристикам по ИСО 9283 относятся:
- точность и повторяемость позиционирования;
- изменение точности позиционирования по разным направлениям;
- точность и повторяемость отработки расстояния;
- время стабилизации положения;
- перерегулирование по положению;
- дрейф характеристик позиционирования;
- взаимозаменяемость;
- точность и повторяемость отработки траектории;
- точность отработки траектории при переориентации;
- отклонения при повороте;
- характеристики скорости движения по траектории;
- минимальное время позиционирования;
- статическая податливость;
- отклонения поперечного перемещения.
5.17 Безопасность
Изготовитель должен указать, что робот соответствует требованиям ИСО 10218 или других стандартов по безопасности.
Приложение A
(справочное)
Рекомендуемый формат представления спецификаций роботов
Дата выпуска | |||||||
………………. | |||||||
Товарный знак | Наименование изготовителя…………………………. | ||||||
…………………………………………………….. | Модель…………………………………………………… | ||||||
Страна |
| ||||||
Основное назначение (см. 5.2)………………………………………………………………………………………….. | |||||||
Источники питания (см. 5.3): | - внешние (типы и характеристики)................... | ||||||
Механическая конструкция, рабочая зона и система координат (см. 5.4, 5.5 и 5.6) Чертеж | |||||||
Чертеж | |||||||
………………………………………………………………………………………………………………………………… | |||||||
………………………………………………………………………………………………………………………………… | |||||||
Внешние габариты и масса (см. 5.7) | |||||||
Механическая конструкция | Устройство управления | ||||||
Масса……….кг | Масса……….кг | ||||||
Базовая установочная поверхность (см. 5.8) | Механический интерфейс (см. 5.9) | ||||
Чертеж | Чертеж | ||||
…………………………………………………………….. | …………………………………………………………….. | ||||
……………………………………………………………. | ……………………………………………………………. | ||||
…………………………………………………………….. | ……………………………………………………………. | ||||
Управление (см. 5.10) | |||||
Тип устройства управления………………………… | Пульт/органы управления………………………......... | ||||
Число управляемых | |||||
Объем памяти рабочей программы | |||||
основной объем……………………………………….. | Интерфейсы ввода/вывода…………………………… | ||||
максимальный объем……………………………….. | …………………………………………………………….. | ||||
Тип управления движением………………………….. | Интерфейсы данных/сети…………………………….. | ||||
Метод управления движением……………………… | …………………………………………………………….. | ||||
Метод интерполяции траектории…………………… | …………………………………………………………….. | ||||
Метод программирования и средства загрузки (см. 5.11)…………………………………………………………. | |||||
Внешняя среда (см. 5.12) | Работа | Хранение/транспортировка | |||
Температура | ………………..……..…….°C | ……………………………°C | |||
Относительная влажность | ………………………….….% | ………………………….….% | |||
Ограничение по высоте над уровнем моря | …………………………….м | ……………………………...м | |||
Электромагнитные помехи | ………………………………. | ……………………………….. | |||
……………………………………………………. | …………………………….. | ……………………………….. | |||
……………………………………………………. | …………………………….. | ……………………………….. | |||
Загрязнения атмосферы | ……………………………… | ………………………………… | |||
Вибрации | ………………………………. | ………………………………… | |||
…………………………………………………….. | ………………………………. | ………………………………… | |||
……………………………………………………. | ………………………………. | ………………………………… | |||
Нагрузка (см. 5.13) | |||||
Номинальная грузоподъемность | |||||
Схема распределения нагрузок | |||||
Предельная нагрузка…………………………. | Дополнительная масса………………………………………. | ||||
Ось | Усилие | Момент | Комментарии: | ||
…………...…Н | …………Н·м | …………………………………………………………………… | |||
…………...…Н | …………Н·м | …………………………………………………………………… | |||
……………...Н | …………Н·м | ........................................................................................................ | |||
Номер степени подвижности | Индивидуальная скорость по степени подвижности (см. 5.14) | Разрешающая способность (см. 5.15) | |||||||
1 | |||||||||
2 | |||||||||
3 | |||||||||
4 | |||||||||
5 | |||||||||
6 | |||||||||
Рабочие характеристики (см. 5.16) | Время позиционирования | ||||||||
Характеристики позиционирования | |||||||||
100% и дополнительно 10% от номинальной нагрузки, | Расстояние | Время | |||||||
|
| Время стабилизации | = | ||||||
|
| Перерегулирование | = | ||||||
|
| Для ограниченного диапазона | = | ||||||
| | Диаграмма дрейфа | |||||||
| AD = | ||||||||
| RD = | ||||||||
| |||||||||
| |||||||||
| Статическая податливость | ||||||||
....мм/Н по | |||||||||
Характеристики отработки траектории и поперечного перемещения | Характеристики скорости движения по траектории | |||||||
Форма траектории…………………………………………… | 100% и дополнительно 10% от номинальной нагрузки | |||||||
100% и дополнительно 10% от номинальной нагрузки | ||||||||
Номинальная скорость движения по траектории | ||||||||
10% | 50% | 100% | 100% от номинальной скорости | AV | RV | FV | ||
|
|
| = | Номинальная скорость движения по траектории | 10% | |||
|
|
| = | 50% | ||||
|
|
| = | 100% | ||||
|
|
| = | 100% от номинальной скорости движения по траектории | = | = | = | |
|
|
| = | |||||
|
|
| = | |||||
|
|
| = | |||||
|
|
| = | |||||
CR = | CR = | CR = | = | |||||
CO = | CO = | CO = | = | |||||
WS = | WS = | WS = | = | |||||
WF = | WF = | WF = | = | |||||
Безопасность (см. 5.17) | ||||||||
Приложение B
(справочное)
Описание обозначения рабочих характеристик. Выдержка из ИСО 9283
В приложении А использованы следующие обозначения рабочих характеристик по ИСО 9283:
АР - точность позиционирования;
RP - повторяемость позиционирования;
vAP - изменение точности позиционирования по разным направлениям;
AD - точность отработки расстояния;
RD - повторяемость отработки расстояния;
t - время стабилизации положения;
OV - перерегулирование по положению;
dAP - дрейф точности позиционирования;
dRP - дрейф повторяемости позиционирования;
E - взаимозаменяемость;
AT - точность отработки траектории;
RT - повторяемость отработки траектории;
CR - ошибка скругления при повороте;
CO - ошибка перебега при повороте;
AV - точность отработки скорости при движении по траектории;
RV - повторяемость отработки скорости при движении по траектории;
FV - флюктуации отработки скорости при движении по траектории;
WS - ошибка хода поперечного перемещения;
WF - ошибка частоты поперечного перемещения.
Индексы a, b, c обозначают характеристики ориентации относительно осей X, Y, Z. Индекс p обозначает характеристику положения.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 8373:1994 | - | *, |
ISO 9283:1998 | IDT | ГОСТ Р 60.3.3.1-2016/ИСО 9283-1998 "Роботы промышленные манипуляционные. Рабочие характеристики и соответствующие методы тестирования" |
ISO 9409-1:1996 | - | *, |
ISO 9787 | IDT | ГОСТ Р 60.0.0.3-2016/ИСО 9787:2013 "Роботы и робототехнические устройства. Системы координат и обозначение перемещений" |
ISO 10218:1992 | - | * |
*Cоответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT- идентичные стандарты. | ||
_____________________
Действует ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 "Роботы и робототехнические устройства. Термины и определения", идентичный ISO 8373:2012.
Действует ГОСТ Р 60.3.4.1-2017/ИСО 9409-1:2004 "Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Круглые фланцы", идентичный ISO 9409-1:2004.
УДК 621.865.8:006.354 | ОКС 25.040.30 | |
Ключевые слова: роботы, робототехнические устройства, характеристики, представление характеристик | ||
Электронный текст документа
и сверен по:
, 2020
{kind=link}