ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТР 60.0.0.11— 2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ОНТОЛОГИИ РОБОТОТЕХНИКИ
Понятия и отношения, описывающие функциональность и поведение
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 РАЗРАБОТАН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 853-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Термины и определения
3 Общие положения
4 Онтологии робототехники, описывающие функциональность и поведение
Библиография
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации — промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Общие положения, основные понятия, термины и определения» и распространяется на все роботы и робототехнические устройства.
ГОСТ Р 60.0.0.11—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ОНТОЛОГИИ РОБОТОТЕХНИКИ
Понятия и отношения, описывающие функциональность и поведение
Robots and robotic devices. Ontologies for robotics. Concepts and relations describing functionality and behavior
Дата введения — 2024—01—01
1 Область применения
Настоящий стандарт определяет онтологии, описывающие функциональность и поведение роботов и робототехнических устройств. Стандарт обеспечивает унифицированный способ представления знаний, понятий и отношений в области робототехники и автоматизации в части функциональных задач и поведения роботов, робототехнических устройств или других искусственных систем.
Настоящий стандарт предназначен для производителей роботов, системных интеграторов, конечных пользователей роботов (производителей деталей, поставщиков услуг и решений и т. д.), поставщиков оборудования для роботов, разработчиков программного обеспечения роботов и исследователей.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1_
агент (agent): Что-то или кто-то, способный действовать самостоятельно и производить изменения в мире.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.2]
2.2
артефакт (artifact): Искусственно созданный трехмерный объект. [ГОСТ Р 60.0.0.8—2023, статья 5.6.3]
2.3_
взаимодействие (interaction): Процесс [Процесс (Process) в SUMO], в котором участвуют два агента [Агент (Agent) в SUMO], состоящий из двух подпроцессов, определяющих действие и реакцию: подпроцесс действия, инициируемый агентом X для реципиента агента Y, вызывает подпроцесс реакции, имеющий Y в качестве агента и X в качестве реципиента.
[ГОСТ Р 60.0.0.8—2023, статья 3.2]
2.4_
измерительное устройство (measuring device): Любое устройство, предназначенное для измерения физической величины.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.9]
2.5 миссия (mission): Алгоритм верхнего уровня, описывающий процесс выполнения целенаправленных действий робота для достижения одной или нескольких комплексных целей.
Издание официальное
2.6_
объект (object): Примерно соответствует классу обычных объектов.
Примечание — Примерами являются обычные физические объекты, географические регионы, местоположения выполнения процессов и дополнения объектов в физическом классе.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.20]
Примечание — В настоящем стандарте объект — это класс вещей, существующих в трехмерном пространстве, которые могут изменяться в результате процессов. Объект имеет пространственные части, существующие во времени одновременно.
2.7_
процесс (process): Класс явлений, которые происходят и имеют временные (темпоральные) части или стадии.
Примечание — Примеры включают длительные события, такие как футбольный матч или гонка, такие действия, как преследование и ожидание. Формальное определение таково: все, что происходит во времени, но не является объектом.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.24]
2.8_
сущность (entity): Универсальный класс индивидуумов, корневой узел онтологии. [ГОСТ Р 60.0.0.8—2023, статья 5.6.26]
2.9 сценарий (scenario): Алгоритм, описывающий процесс выполнения целенаправленных действий робота для достижения некоторой локальной цели.
2.10 технологическая операция; ТОП (technological operation, ТОР): Элементарный целенаправленный процесс, выполняемый роботом-агентом.
Примечание — Совокупность ТОП полностью определяет возможные роли и поведение робота в контексте решаемой задачи.
2.11_
устройство (device): Артефакт, предназначение которого состоит в том, чтобы служить инструментом в определенном подклассе процесса.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.29]
2.12 функциональность (functionality): Набор возможностей, которые в принципе предоставляет данная система или устройство.
2.13 функция (function): Роль агента в целенаправленном процессе.
2.14 целенаправленный процесс (intentional process): Изменение свойств некоторых объектов во времени и получение новых свойств этих объектов в соответствии с заданными целями.
Примечание —См. [1].
2.15_
электрическое устройство (electric device): Устройство, приводимое в действие с помощью электричества.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.35]
3 Общие положения
3.1 Понятия онтологий, определенные в данном стандарте, выделены курсивом. Слитное написание понятий в одно слово применяется при описании классов онтологий и отношений между ними на языке OWL.
3.2 Онтология SUMO, определенная в ГОСТ Р 60.0.0.81, является онтологией верхнего уровня для онтологий робототехники. Базовая таксономия SUMO приведена на рисунке 1.
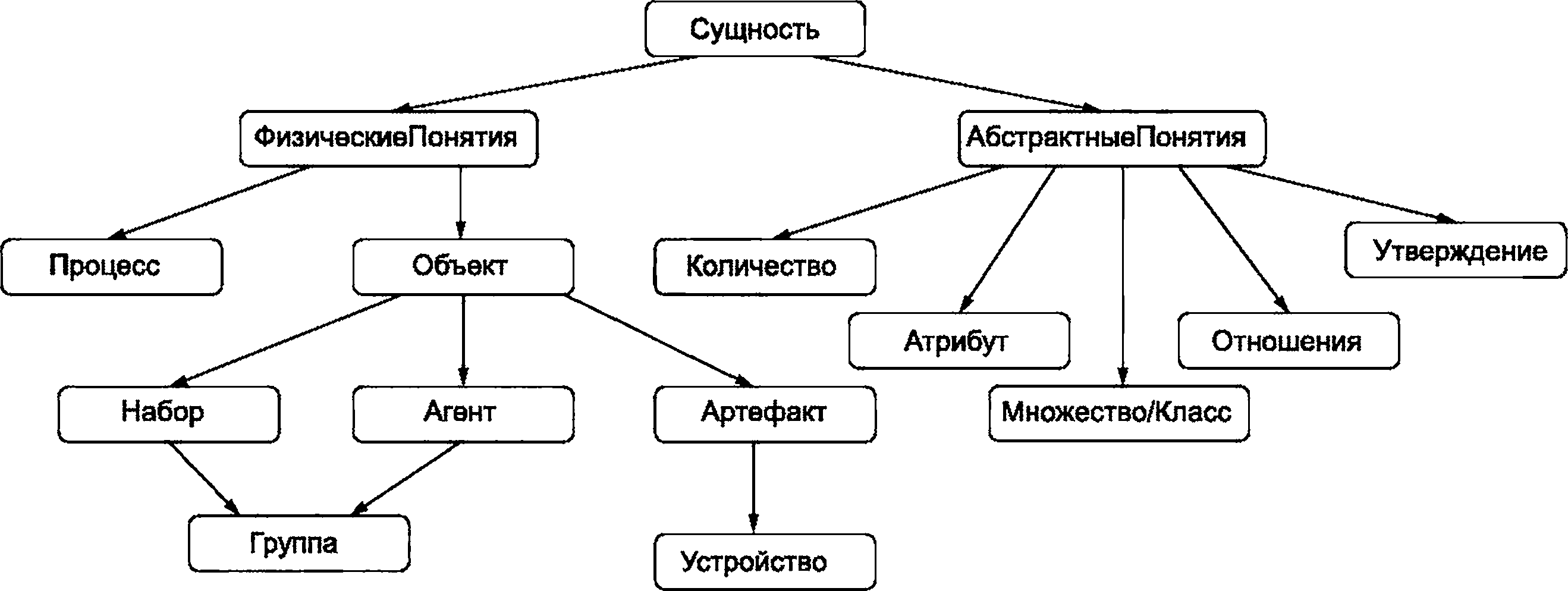
Рисунок 1 — Базовая таксономия SUMO
3.3 Понятия, связанные с базовой таксономией SUMO на языке OWL: Declaration(Class(:АбстрактныеПонятия)) Declaration(Class(:Агент)) Declaration(Class(:Артефакт) ) Declaration(Class(:Атрибут) ) Declaration(Class(:Группа) ) Declaration(Class(:Количество) ) Declaration(Class(:Набор)) Declaration(Class(:0бъект)) Declaration(Class(:Отношения)) Declaration(Class(:Процесс)) Declaration(Class(:Сущность) ) Declaration(Class(:Устройство) ) Declaration(Class(:Утверждение)) Declaration(Class(:ФизическиеПонятия)) ############################ # Classes ############################ # Class: :АбстрактныеПонятия (:АбстрактныеПонятия) SubClassOf(:АбстрактныеПонятия :Сущность) DisjointClasses(:АбстрактныеПонятия :ФизическиеПонятия) # Class: :Агент (:Агент) SubClassOf(:Агент :0бъект) # Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :0бъект) # Class: :Атрибут (:Атрибут) SubClassOf(:Атрибут :АбстрактныеПонятия) # Class: :Группа (:Группа) SubClassOf(:Группа :Агент) SubClassOf(:Группа :Набор) # Class: количество (:Количество) SubClassOf(:Количество :АбстрактныеПонятия)
# Class: :Набор (:Набор) SubClassOf(:Набор :Объект) # Class: :Объект (:Объект) SubClassOf(:0бъект :ФизическиеПонятия) # Class: :Отношения (:Отношения) SubClassOf (:Отношения :АбстрактныеПонятия) # Class: :Процесс (:Процесс) SubClassOf (:Процесс :ФизическиеПонятия) # Class: Устройство (Устройство) SubClassOf(Устройство :Артефакт) # Class: Утверждение (Утверждение) SubClassOf(Утверждение :АбстрактныеПонятия) # Class: :ФизическиеПонятия (:ФизическиеПонятия) SubClassOf(:ФизическиеПонятия :Сущность)
3.4 С онтологией SUMO согласована онтология CORA. Это доменная онтология, описывающая концепции предметной области «Робототехника и автоматизация». Основным понятием в CORA является Робот, это понятие связано с большинством других понятий в данной онтологии (см. ГОСТ Р 60.0.0.8). В настоящем стандарте Робот — это устройство-агент, предназначенное действовать в физическом мире для выполнения одной или нескольких задач, имеющее в своем составе систему управления и интерфейс для взаимодействия с окружающим миром. Таксономия понятий онтологии CORA, связанных с понятием Робот, показана на рисунке 2.
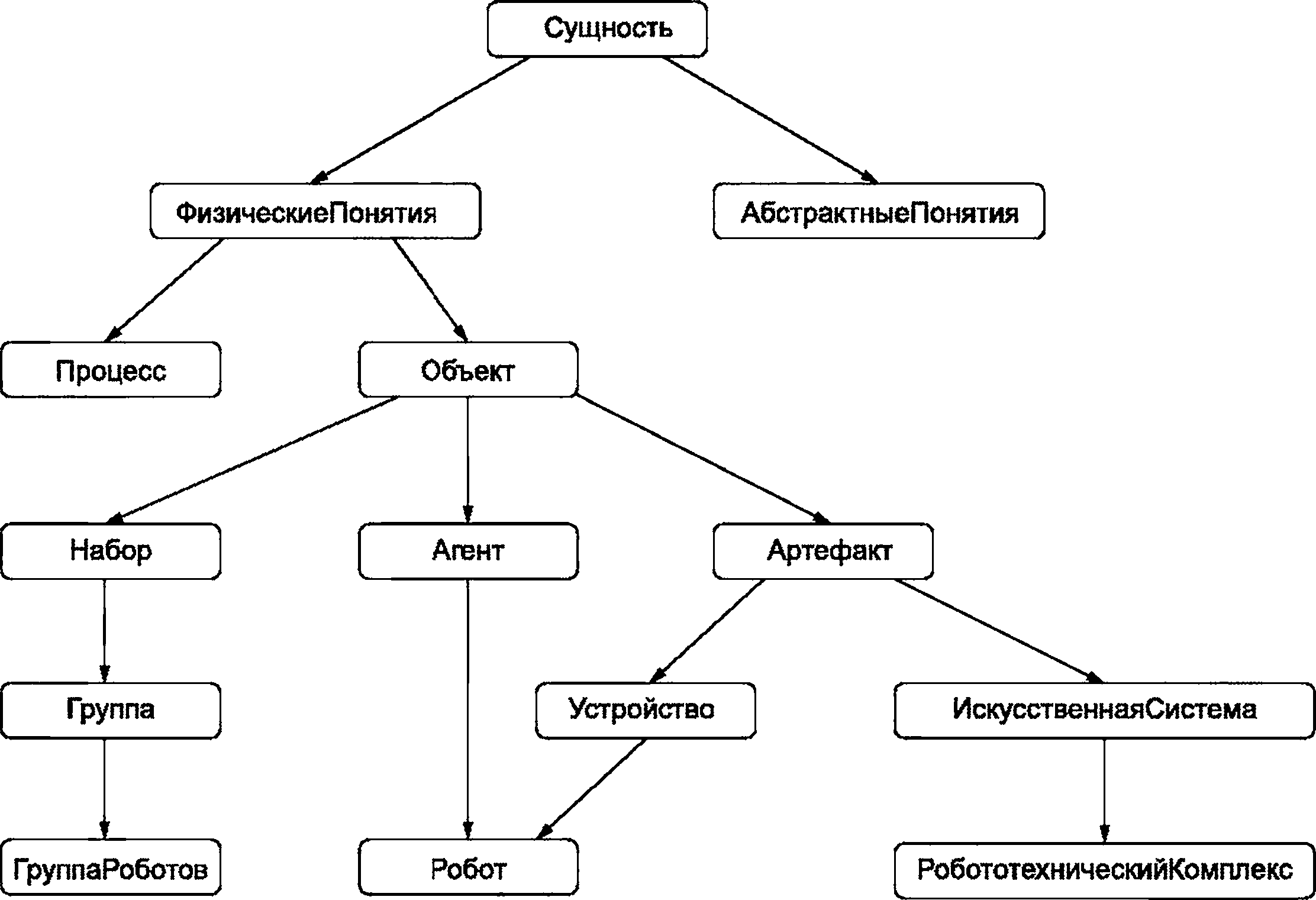
Рисунок 2 — Таксономия понятий онтологии CORA, связанных с понятием Робот
3.5 Таксономия понятий онтологии CORA, связанных с понятием Робот, на языке OWL:
Declaration(Class(:АбстрактныеПонятия))
Declaration(Class(:Агент))
Declaration(Class(:Артефакт))
Declaration(Class(:Группа))
Declaration(Class(:ГруппаРоботов))
Declaration(Class(:ИскусственнаяСистема))
Declaration(Class(:Набор)) Declaration(Class(:0бъект) ) Declaration(Class(:Процесс)) Declaration(Class(:Робот)) Declaration (Class(:РобототехническийКомплекс)) Declaration(Class(:Сущность) ) Declaration(Class(Устройство)) Declaration(Class(:ФизическиеПонятия)) ############################ # Classes ############################ # Class: :АбстрактныеПонятия (:АбстрактныеПонятия) SubClassOf(:АбстрактныеПонятия :Сущность) # Class: :Агент (:Агент) SubClassOf(:Агент :0бъект) # Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :0бъект) # Class: :Группа (:Группа) SubClassOf(:Группа :Набор) # Class: :ГруппаРоботов (:ГруппаРоботов) SubClassOf(:ГруппаРоботов :Группа)
# Class: :ИскусственнаяСистема (:ИскусственнаяСистема) SubClassOf(:ИскусственнаяСистема :Артефакт) # Class: :Набор (:Набор) SubClassOf(:Набор :0бъект) # Class: :Объект (:Объект) SubClassOf(:Объект :ФизическиеПонятия) # Class: :Процесс (:Процесс) SubClassOf(:Процесс :ФизическиеПонятия) # Class: :Робот (:Робот) SubClassOf(:Робот :Агент) SubClassOf(:Робот Устройство)
# Class: :РобототехническийКомплекс (:РобототехническийКомплекс) SubClassOf(:РобототехническийКомплекс :ИскусственнаяСистема) # Class: Устройство (:Устройство) SubClassOf(Устройство :Артефакт)
# Class: :ФизическиеПонятия (:ФизическиеПонятия) SubClassOf(:ФизическиеПонятия :Сущность)
3.6 Понятие Робот-агент применимо к роботам и процессам, в которых робот является активным участником. В этой парадигме режимы работы представляются в виде субпонятий понятия Робот-агент, соответствующих тематическим ролям робота в различных процессах.
3.7 Важным дополнением CORA является онтология CORAX, которая представляет понятия и отношения, характерные для субдоменов предметной области «Робототехника и автоматизация», но являющиеся слишком общими для включения в CORA (см. ГОСТ Р 60.0.0.8).
3.8 В настоящем стандарте использован подход, реализованный в онтологии CORAX для описания понятия ТехническийОблик. Таксономия понятия ТехническийОблик приведена на рисунке 3.
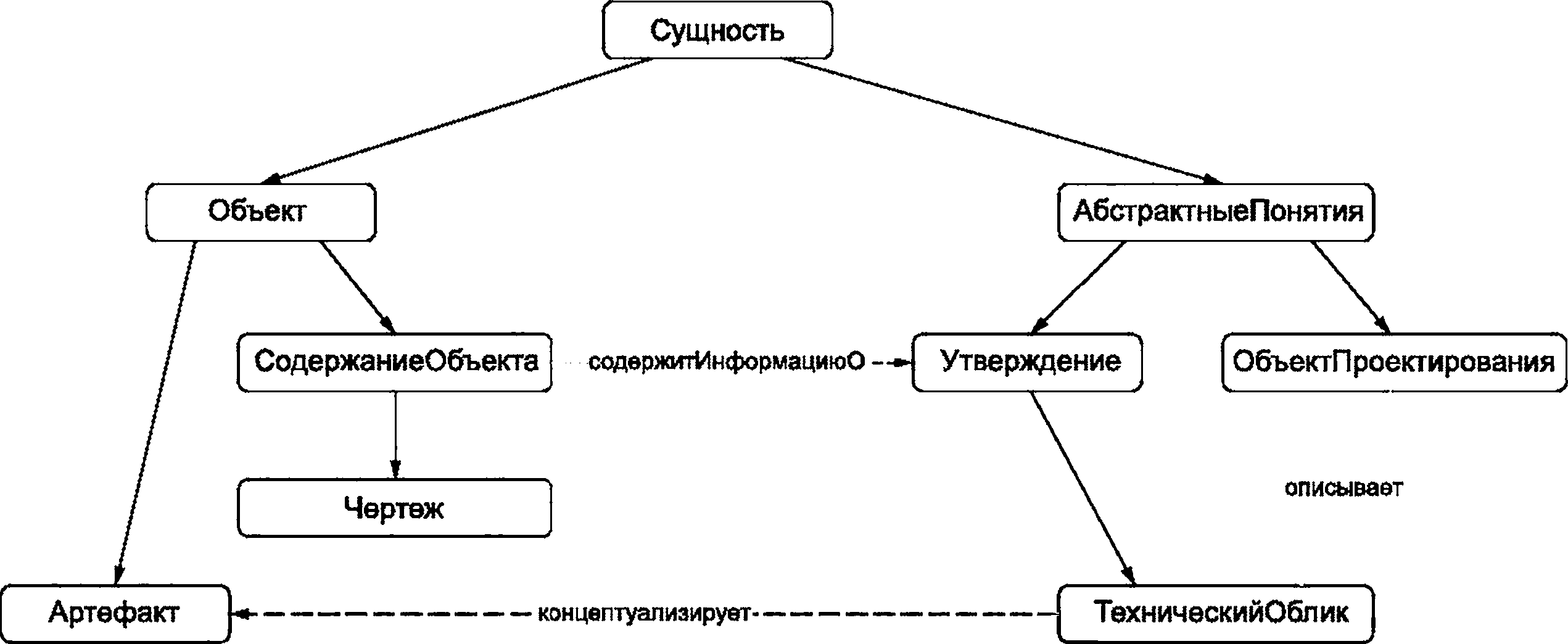
Рисунок 3 — Таксономия понятия ТехническийОблик онтологии CORAX
3.9 Таксономия понятия ТехническийОблик онтологии CORAX на языке OWL: Declaration(Class(:АбстрактныеПонятия)) Declaration(Class(:Артефакт)) Declaration(Class(:ОбъектПроектирования)) Declaration(Class(:Объект)) Declaration(Class(:СодержаниеОбъекта)) Declaration(Class(:Сущность)) Declaration(Class(:ТехническийОблик)) Declaration(Class(:Утверждение)) Declaration(Class(:Чертеж)) Declaration(ObjectProperty(:концептуализирует)) Declaration(Obj ectProperty(:описывает)) Declaration(Obj ectProperty(:содержитИнформациюО)) ############################
# Object Properties
# ###########################
# Object Property: :концептуализирует (:концептуализирует) AsymmetricObj ectProperty(:концептуализирует)
Obj ectPropertyDomain(:концептуализирует :ТехническийОблик)
Obj ectPropertyRange(:концептуализирует :Артефакт)
# Object Property: :описывает Дописывает)
AsymmetricObjectProperty(:описывает)
ObjectPropertyDomain(:описывает :ТехническийОблик) ObjectPropertyRange(описывает :ОбъектПроектирования) # Object Property: :содержитИнформациюО (:содержитИнформациюО) ObjectPropertyDomain(:содержитИнформациюО :СодержаниеОбъекта) Obj ectPropertyRange(:содержитИнформациюО :Утверждение) ############################ # Classes ############################
# Class: :АбстрактныеПонятия (:АбстрактныеПонятия) SubClassOf(:АбстрактныеПонятия Сущность)
# Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :Объект)
# Class: :ОбъектПроектирования (:ОбъектПроектирования) SubClassOf(:ОбъектПроектирования :АбстрактныеПонятия)
# Class: :Объект (:Объект)
SubClassOf(:Объект :Сущность)
# Class: :СодержаниеОбъекта (:СодержаниеОбъекта) SubClassOf(:СодержаниеОбъекта :Объект) # Class: :ТехническийОблик (:ТехническийОблик) SubClassOf(:ТехническийОблик :Утверждение)
# Class: Утверждение (Утверждение) SubClassOf(Утверждение :АбстрактныеПонятия) # Class: :Чертеж (:Чертеж)
SubClassOf(:Чертеж :СодержаниеОбъекта)
3.10 Расширением CORA является онтология RPARTS, которая также не описывает реальных устройств, которые могут играть роль компонентов роботов (см. ГОСТ Р 60.0.0.8). В онтологию RPARTS на уровне аксиом включены некоторые общие понятия и этот набор является расширяемым. Во всех случаях определения относятся к устройствам, установленным и подключенным на роботе.
Таксономия понятий онтологии RPARTS, связанных с понятием КомпонентРобота, показана на рисунке 4.
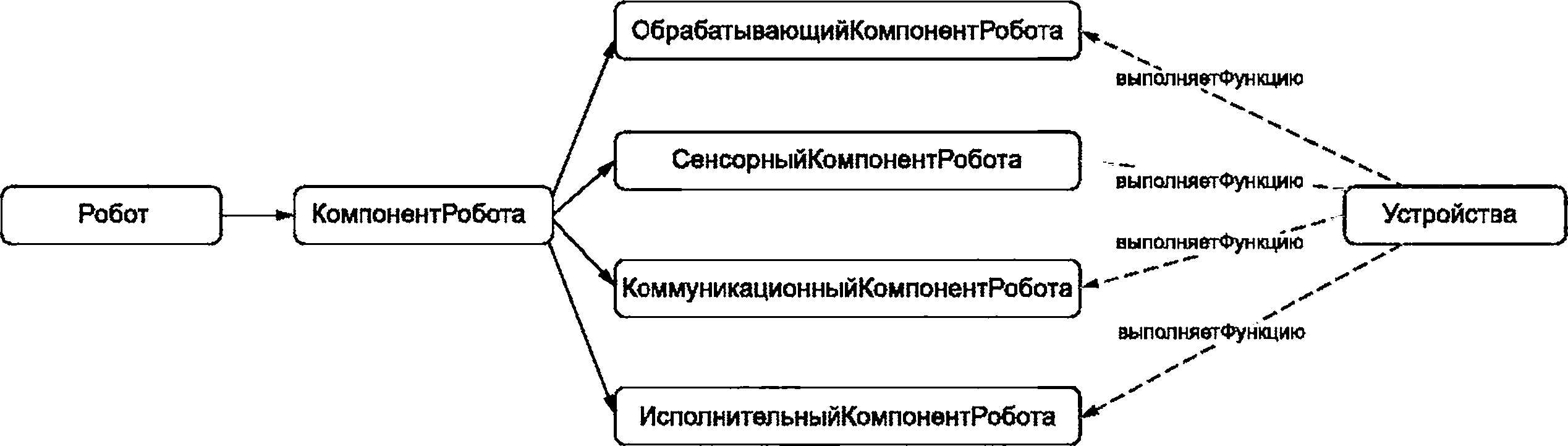
Рисунок 4 — Таксономия понятий онтологии RPARTS, связанных с понятием КомпонентРобота
3.11 Таксономия понятий онтологии RPARTS, связанных с понятием КомпонентРобота, на языке OWL: Declaration(Class(:Робот)) Declaration(Class(:КомпонентРобота) ) Declaration(Class(ИсполнительныйКомпонентРобота)) Declaration(Class(:КоммуникационныйКомпонентРобота)) Declaration(Class(:ОбрабатывающийКомпонентРобота)) Declaration(Class(:СенсорныйКомпонентРобота) ) Declaration(Class(Устройства)) Declaration(Obj ectProperty(:выполняетФункцию)) ############################ # Object Properties ############################ # Object Property: :выполняетФункцию (:выполняетФункцию) ObjectPropertyDomain(:выполняетФункцию :Устройства) ObjectPropertyRange(:выполняетФункцию :ИсполнительныйКомпонентРобота) Obj ectPropertyRange(:выполняетФункцию :КоммуникационныйКомпонентРобота) ObjectPropertyRange(:выполняетФункцию :ОбрабатывающийКомпонентРобота) ObjectPropertyRange(:выполняетФункцию :СенсорныйКомпонентРобота) ############################ # Classes ############################ # Class: :КомпонентРобота (:КомпонентРобота) SubClassOf(:КомпонентРобота :Робот) # Class: ИсполнительныйКомпонентРобота (ИсполнительныйКомпонентРобота)
SubClassOf(:ИсполнительныйКомпонентРобота :КомпонентРобота)
# Class: :КоммуникационныйКомпонентРобота (:КоммуникационныйКомпонентРобота) SubClassOf(:КоммуникационныйКомпонентРобота :КомпонентРобота)
# Class: ОбрабатывающийКомпонентРобота (ОбрабатывающийКомпонентРобота) SubClassOf(:ОбрабатывающийКомпонентРобота :КомпонентРобота)
# Class: :СенсорныйКомпонентРобота (:СенсорныйКомпонентРобота) SubClassOf(:СенсорныйКомпонентРобота :КомпонентРобота)
4 Онтологии робототехники, описывающие функциональность
и поведение4.1 Понятие «технологическая операция»
4.1.1 Базовым понятием для определения функциональности и поведения робота является понятие ТехнологическаяОперация (ТОП) [2]. ТОП является целенаправленно выполняемым процессом, класс ТОП является производным от класса SUMO ЦеленаправленныйПроцесс (IntentionalProcess), который, в свою очередь, является подклассом от класса Процесс (Process).
4.1.2 Класс ТОП (TOP_OfRobot) описывается непересекающимися подклассами: Обработка (ProcessingTOP_OfRobot), Движение (MotionTOP_OfRobot), Измерение (SensorialTOP_OfRobot), Коммуникация (CommunicationTOP_OfRobot). Эти подклассы соответствуют ТОП, выполняемым разными частями (подсистемами) робота, показанными на рисунке 4.
4.2 Понятие «функциональность робота»
4.2.1 В рамках ТОП как целенаправленного процесса робот, являющийся агентом этого процесса, должен соответствовать заданной функциональности. Понятие Функциональность является концептом класса абстрактных понятий и обобщает понятие ТОП. Таксономия понятий, связанных с понятием Функциональность, показана на рисунке 5.
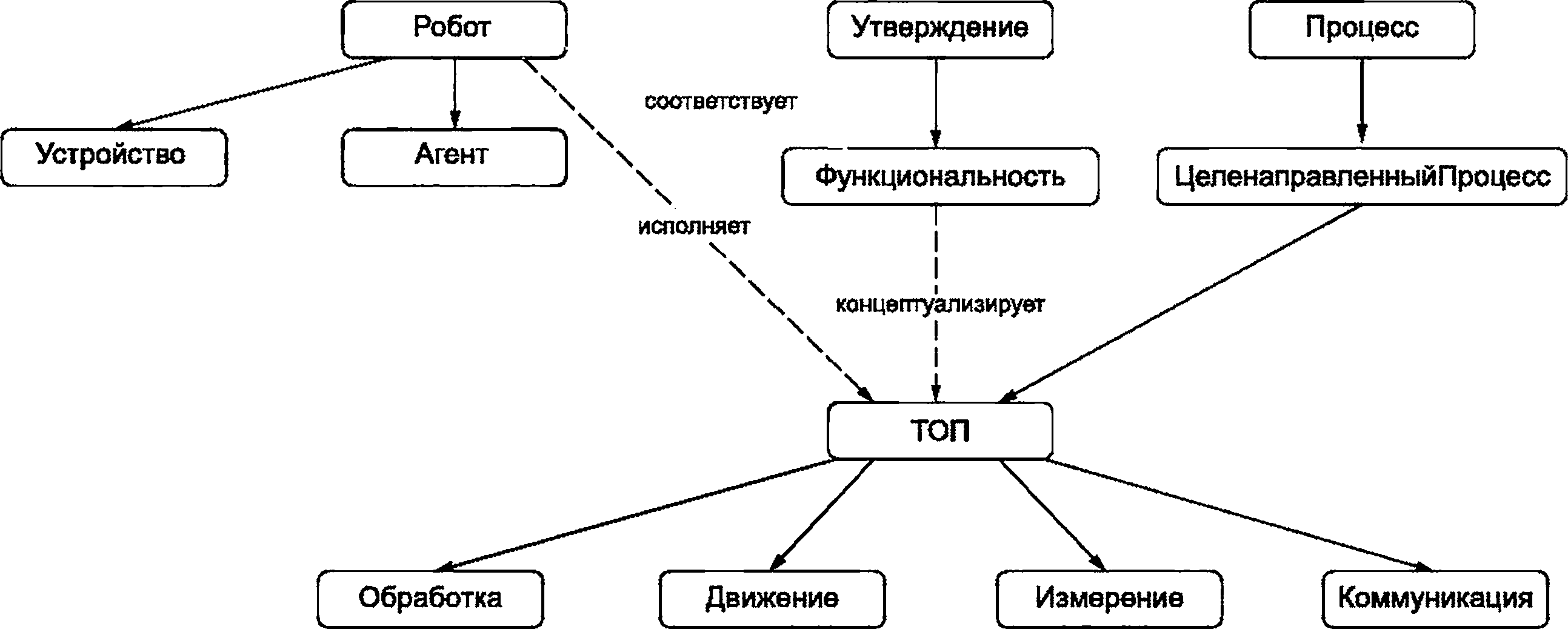
Рисунок 5 — Таксономия понятий, связанных с понятием Функциональность
4.2.2 Таксономия понятий, связанных с понятием Функциональность, на языке OWL:
Declaration(Class(:Агент))
Declaration(Class(:Движение))
Declaration(Class(Измерение) )
Declaration(Class(:Коммуникация))
Declaration(Class(:Обработка))
Declaration(Class(:Процесс))
Declaration(Class(:Робот))
Declaration(Class(:ТОП))
Declaration(Class(Устройство) ) Declaration(Class(Утверждение)) Declaration(Class(:Функциональность) ) Declaration(Class(:ЦеленаправленныйПроцесс)) Declaration(Obj ectProperty(:исполняет)) Declaration (ObjectProperty(:концептуализирует)) Declaration(ObjectProperty(:соответствует)) ############################ # Object Properties ############################ # Object Property: исполняет (исполняет)
SubObj ectPropertyOf(:исполняет owl:topObjectProperty)
Obj ectPropertyDomain(:исполняет :Робот)
Obj ectPropertyRange(:исполняет :ТОП)
# Object Property: :концептуализирует (концептуализирует)
Obj ectPropertyDomain(:концептуализирует :Функциональность)
ObjectPropertyRange(:концептуализирует :ТОП)
# Object Property: соответствует (соответствует)
ObjectPropertyDomain(:соответствует :Робот)
Obj ectPropertyRange(:соответствует :Функциональность) ############################ # Classes ############################ # Class: :Агент (:Агент) SubClassOf(:Агент :Робот) # Class: :Движение (:Движение) SubClassOf(:Движение :ТОП) # Class: :Измерение (:Измерение) SubClassOf(:Измерение :ТОП)
# Class: коммуникация (:Коммуникация) SubClassOf(:Коммуникация :ТОП)
# Class: :ЦеленаправленныйПроцесс (:ЦеленаправленныйПроцесс) SubClassOf(:ЦеленаправленныйПроцесс :Процесс)
# Class: :Обработка (:Обработка) SubClassOf(:Обработка :ТОП) # Class: :ТОП (:ТОП)
SubClassOf(:ТОП :ЦеленаправленныйПроцесс)
# Class: Устройство (Устройство) SubClassOf(:Устройство :Робот)
# Class: :Функциональность (:Функциональность) SubClassOf(:Функциональность :Утверждение)
4.3 Понятие «поведение робота»
4.3.1 Понятие ПоведениеРобота связывает физическое описание робота-агента с выполняемой миссией. Поведение формируется на базе ТОП. Таксономия понятий, связанных с понятием ПоведениеРобота, показана на рисунке 6.
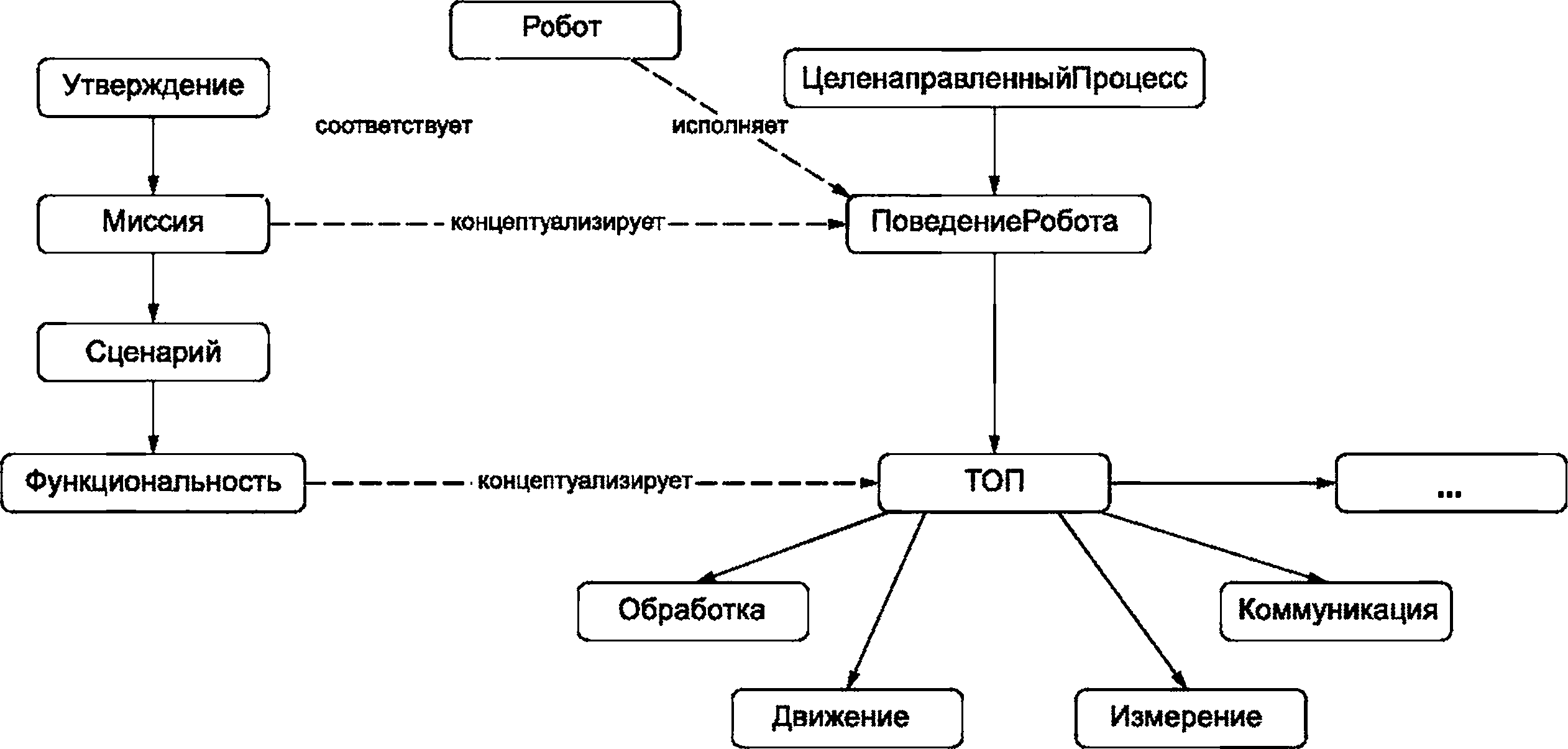
Рисунок 6 — Таксономия понятий, связанных с понятием ПоведениеРобота
4.3.2 Таксономия понятий, связанных с понятием ПоведениеРобота, на языке OWL: Declaration(Class(:Движение)) Declaration(Class(Измерение)) Declaration(Class(:Коммуникация)) Declaration(Class(:Миссия)) Declaration(Class(:Обработка)) Declaration(Class(:ПоведениеРобота)) Declaration(Class(:Робот)) Declaration(Class(:Сценарий)) Declaration(Class(:ТОП)) Declaration(Class(Утверждение)) Declaration(Class(:Функциональность)) Declaration(Class(:ЦеленаправленныйПроцесс)) Declaration(ObjectProperty(исполняет)) Declaration(Obj ectProperty(:концептуализирует)) Declaration(ObjectProperty(:соответствует)) ############################
# Object Properties
# ###########################
# Object Property: исполняет (исполняет)
SubObjectPropertyOf(:исполняет owl:topObjectProperty)
# Object Property: соответствует (соответствует)
ObjectPropertyDomain(:соответствует :Робот)
Obj ectPropertyRange(:соответствует :Миссия) ############################ # Classes
############################
# Class: :Движение (:Движение) SubClassOf(:Движение :ТОП)
# Class: Измерение (Измерение) SubClassOf(:Измерение :ТОП)
# Class: коммуникация ^Коммуникация) SubClassOf(:Коммуникация :ТОП)
# Class: :Миссия (:Миссия)
Equivalentclasses(:Миссия ObjectSomeValuesFrom(:концептуализирует :ПоведениеРобота) ) SubClassOf(:Миссия Утверждение) # Class: :Обработка (:Обработка) SubClassOf(:Обработка :ТОП) # Class: :ПоведениеРобота (:ПоведениеРобота) SubClassOf(:ПоведениеРобота :ЦеленаправленныйПроцесс) # Class: :Робот (:Робот)
Equivalentclasses(:Робот ObjectSomeValuesFrom(:исполняет :ПоведениеРобота)) # Class: :Сценарий (:Сценарий) SubClassOf(:Сценарий :Миссия) # Class: :ТОП (:ТОП) SubClassOf(:ТОП :ПоведениеРобота)
# Class: Функциональность (Функциональность)
Equivalentclasses(:Функциональность ObjectSomeValuesFrom(:концептуализирует :ТОП)) SubClassOf(:Функциональность :Сценарий)
Библиография
[1] Гурвич Ф.Г. Математические методы решения экономических задач. — Сб. 6. — 1974. — 199 с.
[2] Организация супервизорного управления в сценариях экстремальной робототехники / Е.Ю. Смирнова, Б.А. Спасский // Робототехника и техническая кибернетика. — Т. 8. — № 4. — Санкт-Петербург: ЦНИИ РТК. — 2020. — С. 245—258.
УДК 621.865.8:165:005.94:006.354
ОКС 25.040.30
35.060
Ключевые слова: роботы, робототехнические устройства, онтология, робототехника, функционирование, поведение
Редактор Е.В. Якубова
Технический редактор И.Е. Черепкова
Корректор О.В. Лазарева
Компьютерная верстка И.Ю. Литовкиной
Сдано в набор 25.09.2023. Подписано в печать 27.09.2023. Формат 60х8478. Гарнитура Ариал.
Усл. печ. л. 1,86. Уч-изд. л. 1,49.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
1
ГОСТ Р 60.0.0.8—2023 «Роботы и робототехнические устройства. Онтологии робототехники. Общие положения, основные понятия, термины и определения».
{kind=link}