ГОСТ Р 8.1036-2024
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственная система обеспечения единства измерений
СТАНДАРТЫ ЧАСТОТЫ И (ИЛИ) ВРЕМЕНИ
Методы оценки основных метрологических характеристик с использованием сигналов, передаваемых глобальными навигационными спутниковыми системами
State system for ensuring the uniformity of measurements. Frequency and/or time standards. Methods for assessing basic metrological characteristics using signals transmitted by global navigation satellite
ОКС 17.020
Дата введения 2024-09-30
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт физико-технических и радиотехнических измерений" (ФГУП "ВНИИФТРИ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 206 "Эталоны и поверочные схемы", подкомитетом ПК 12 "Эталоны и поверочные схемы в области измерений времени и частоты"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 12 апреля 2024 г. № 447-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
В современных науке и производстве, в таких высокотехнологических видах жизнедеятельности, как связь, транспорт, энергетика, медицина, сфера обеспечения обороноспособности и безопасности государства и другие, широко применяются стандарты частоты и (или) времени или прецизионные средства измерений на их основе.
В процессе эксплуатации таких средств измерений возникает необходимость оценки их характеристик на местах эксплуатации, что на практике, как правило, трудно реализуемо. В то же время развитие оборудования приема сигналов глобальных навигационных спутниковых систем и методов обработки полученных результатов измерений позволяет произвести оценку основных метрологических характеристик стандартов частоты и (или) времени без доставки к местам их размещения стандартов, имеющих более высокие показатели точности.
Данный стандарт направлен на развитие методов контроля характеристик стандартов частоты и (или) времени, снижение рисков выведения из строя высокоточного оборудования при транспортировке к месту проведения работ, а также на сокращение расходов на их содержание.
Объектом стандартизации являются методы оценки основных метрологических характеристик стандартов частоты и (или) времени с использованием сигналов, передаваемых глобальными навигационными спутниковыми системами.
1 Область применения
_______________
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 8.567 Государственная система обеспечения единства измерений. Измерения времени и частоты. Термины и определения
ГОСТ Р 8.736 Государственная система обеспечения единства измерений. Измерения прямые многократные. Методы обработки результатов измерений. Основные положения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 8.567.
4 Сокращения
В настоящем стандарте применены следующие сокращения:
ГНСС | - глобальная навигационная спутниковая система (GPS, ГЛОНАСС, Galileo, Beidou и другие); |
ГСВЧ | - государственная служба времени, частоты и определения параметров вращения Земли; |
ГЭТ 1 | - государственный первичный эталон единиц времени, частоты и национальной шкалы времени; |
КА | - космический аппарат; |
МБМВ | - международное бюро мер и весов; |
НСП | - неисключенная систематическая погрешность; |
ПО | - программное обеспечение; |
СИ | - средство измерений; |
СКО | - среднее квадратическое относительное отклонение; |
СКДО | - среднее квадратическое относительное двухвыборочное отклонение; |
СПО | - специальное программное обеспечение; |
СЧВ | - стандарты частоты и (или) времени; |
ШВ | - шкала времени; |
ШВС | - шкала времени системная ГНСС; |
ЭВИ | - эфемеридно-временная информация; |
UTC(SU) | - национальная шкала координированного времени (национальная шкала времени); |
- реализация национальной шкалы времени UTC(SU), передаваемая системой ГЛОНАСС; | |
- локальная реализация национальной шкалы времени UTC(SU), формируемая эталоном, средством измерений или техническим устройством; |
5 Методы оценки основных метрологических характеристик стандартов частоты и (или) времени с использованием сигналов, передаваемых глобальными навигационными спутниковыми системами
5.1 Методы оценки смещений (разности) ШВ СЧВ
В соответствии с требованиями федерального закона [1], а также постановления [2] ГСВЧ распространяет информацию о точном значении московского времени и календарной дате. Информация о точном значении московского времени и календарной дате формируется на основе UTC(SU), является официальной, общедоступной и обязательной для использования в Российской Федерации. Указанная информация, а также эталонные сигналы частоты и времени распространяются с использованием ГНСС ГЛОНАСС, спутниковых систем связи, радиосвязи и радиовещания.
СИ, применяемые в сфере государственного регулирования обеспечения единства измерений и обеспечивающие контроль погрешности синхронизации времени, должны прослеживаться к ГЭТ 1 с установлением обязательных метрологических требований к смещениям (разности) местных ШВ относительно UTC(SU).
При оценке смещений (разности) ШВ СЧВ следует применять поверенные приемники сигналов ГНСС, прошедшие процедуру калибровки внутренних задержек сигналов (задержек сигналов в приемном тракте) и имеющие соответствующие сертификаты с указанием значений погрешности (неопределенности) измерений при калибровке.
Основными методами сравнения ШВ по сигналам ГНСС являются метод "односторонней передачи" (абсолютный режим) и метод "одновременного наблюдения" (дифференциальный режим), описанные в [3], [4].
ГНСС являются сложными многокомпонентными системами, и погрешность координатно-временных определений с их применением зависит от большого количества факторов.
Основными источниками погрешности являются:
- погрешность ЭВИ;
- атмосферная задержка сигнала ГНСС (в ионосфере и тропосфере);
- условия приема сигнала ГНСС: блокирование искусственными и природными препятствиями, переотражения сигнала, радиочастотные помехи и др.;
- аппаратурные погрешности (калибровка ГНСС приемника, шум измерений и др.).
Погрешность, вносимую большинством из этих факторов, невозможно заранее спрогнозировать, поэтому она трактуется как случайная и оценивается статистическими методами. Для достоверной оценки случайной составляющей погрешности интервалы времени наблюдений должны составлять не менее одних суток, при этом интервалы времени наблюдений и интервалы времени измерения рекомендуется выбирать в соответствии с ГОСТ 8.567.
Границы (доверительные границы) случайной погрешности оценки смещений ШВ и суммарной погрешности измерений оцениваются в соответствии с ГОСТ Р 8.736. Составляющие НСП измерений более подробно рассмотрены в 5.1.1-5.1.3, 5.2.1 и 5.2.2.
5.1.1 Методы оценки смещений (разности) ШВ с применением приемников сигналов ГНСС, оснащенных выходом импульсных сигналов 1 Гц
Для реализации данного метода применяется один приемник сигналов ГНСС, размещаемый в месте дислокации исследуемого СЧВ. Обязательным условием в данном случае является наличие у приемника нормированной метрологической характеристики, характеризующей пределы допускаемых смещений формируемой ШВ (выходного импульсного сигнала 1 Гц) относительно UTC(SU).
Измерения выполняют по схеме, приведенной на рисунке А.1.
Для удобства обработки результатов измерений рекомендуется обеспечить их автоматическую фиксацию с применением СПО, считывающего показания измерителя временных интервалов (двухканального частотомера, работающего в режиме измерения интервалов времени) через имеющийся интерфейс (RS-232, USB-порт, LAN и т.д.).

где k - коэффициент, определяемый принятой доверительной вероятностью;
5.1.2 Методы оценки смещений (разности) ШВ с использованием псевдодальномерных кодовых измерений
Для оценки разности ШВ по кодовым псевдодальномерным измерениям рекомендуется использование данных в формате CGGTTS или аналогичном. Файлы в формате CGGTTS содержат оценки расхождения ШВ, являющейся опорной ШВ для приемника и ШВС ГНСС по каждому видимому КА, полученные по различным типам сигналов. При расчете расхождений ШВ используют только данные непосредственных кодовых измерений псевдодальности и данные навигационного сообщения о разности между ШВС ГНСС и опорными ШВ [UTC(SU), UTC(USNO) и т.д.].
Также расхождение ШВ может быть рассчитано с использованием псевдодальномерных кодовых ГНСС измерений, содержащихся в файлах в формате RINEX [5] или подобном. Алгоритмы расчетов подробно описаны в [6]-[8], также существует несколько вариантов СПО, предназначенного для проведения расчетов по описанным алгоритмам, распространяемого как на коммерческой основе, так и свободно. Например, свободно распространяемое МБМВ ПО с открытым исходным кодом на языке Fortran под названием "R2CGGTTS".
Формат файлов CGGTTS стандартизован МБМВ и описан в [9], [10], специализированные ГНСС приемники для временных сличений, как правило, штатно формируют файлы в данном формате.
5.1.2.1 Абсолютный режим
При выполнении измерений применяется один приемник сигналов ГНСС, размещаемый в месте дислокации исследуемого СЧВ. В качестве опорных сигналов для приемника используются выходные сигналы исследуемого СЧВ: импульсный сигнал 1 Гц и высокочастотный синусоидальный сигнал (как правило, 5 или 10 МГц).
Измерения выполняют по схеме, приведенной на рисунке Б.1. Значения задержек сигналов в приемном тракте приемника и задержки импульсного сигнала 1 Гц в кабеле № 2, как правило, заносятся в файлы настроек приемников и учитываются при обработке результатов измерений автоматически.
Структура формата файлов CGGTTS и ему подобных допускает дискретизацию данных с интервалами времени измерения 5 и 16 мин, а также кратных этим значениям.


где k - коэффициент, определяемый принятой доверительной вероятностью;
5.1.2.2 Дифференциальный режим
Дифференциальный режим позволяет существенно уменьшить составляющие погрешности за счет погрешности формирования ЭВИ, атмосферной задержки сигналов и нестабильности ШВС ГНСС.
Для реализации дифференциального режима при измерениях применяется два аналогичных приемника сигналов ГНСС, размещаемых в местах дислокации исследуемого СЧВ и СЧВ, имеющего более высокие показатели точности (далее - опорный СЧВ).
Для оценки смещений (разности) ШВ следует использовать только те типы сигналов ГНСС, для которых в процессе калибровки определены задержки сигналов в приемном тракте обоих приемников.
Измерения выполняют одновременно по схеме, приведенной на рисунке В.1. Для оценки характеристик используется измерительная информация двух приемников, для чего должен быть обеспечен информационный обмен.
Обязательным условием в данном случае является наличие у опорного СЧВ, нормированной метрологической характеристики, характеризующей пределы допускаемых смещений формируемой ШВ (выходного импульсного сигнала 1 Гц) относительно UTC(SU).
В зависимости от длины базовой линии (расстояния между исследуемым СЧВ и опорным СЧВ) могут применяться различные методы оценки разности ШВ.
Метод усреднения по одновременно наблюдаемым КА (метод Common-View)
Данный метод является наиболее предпочтительным при сравнении удаленных ШВ, поскольку позволяет существенно уменьшить составляющие погрешности, обусловленные погрешностью формирования ЭВИ и нестабильностью ШВС ГНСС. Недостатком данного метода является ограничение по расстоянию между исследуемым СЧВ и опорным СЧВ, поскольку с увеличением расстояния уменьшается количество одновременно наблюдаемых КА. Рекомендуемая длина базовых линий - до 2000 км.

M - количество одновременно наблюдаемых КА.

где k - коэффициент, определяемый принятой доверительной вероятностью;
Примечания
1 В соответствии с [11] погрешность формирования информации о поправке к ШВ системы ГЛОНАСС относительно UTC(SU), передаваемой в кадре навигационного сообщения, находится в пределах ±1 мкс.
2 Если приемник способен принимать сигналы ГНСС в нескольких частотных диапазонах, можно практически полностью исключить ионосферную составляющую погрешности за счет формирования безионосферной комбинации сигналов, однако в этом случае увеличивается случайная аппаратурная составляющая погрешности кодовых измерений.
3 Если оба приемника способны принимать сигналы ГНСС в нескольких частотных диапазонах, можно выбрать оптимальный тип сигнала в зависимости от длины базовой линии; например, для расстояний между приемниками менее 100 км рекомендуется использовать одночастотные измерения, при расстоянии более 300 км - безионосферную комбинацию.
4 Для небольших базовых линий путь, который проходит сигнал ГНСС в атмосфере, достаточно схож, и воздействие атмосферы существенно уменьшается при формировании разности по одновременно наблюдаемым КА. При этом нескомпенсированная часть ионосферной задержки оказывается меньше, чем увеличение шума измерений из-за формирования безионосферной комбинации.
Метод усреднения по всем наблюдаемым на каждом пункте КА (метод All-in-View)
Данный метод применяют при отсутствии или слишком малом количестве одновременно наблюдаемых КА. Рекомендуемая длина базовых линий - более 3000 км.

N - количество КА, наблюдаемых в месте дислокации исследуемого СЧВ;
M - количество КА, наблюдаемых в месте дислокации опорного СЧВ.
5.1.3 Методы оценки смещений (разности) ШВ с использованием псевдодальномерных кодовых и фазовых измерений
Если имеющиеся ГНСС приемники способны принимать кодовые и фазовые измерения как минимум в двух частотных диапазонах, для оценки смещений могут быть применены методы апостериорного высокоточного абсолютного позиционирования (англ. РРР - Precise Point Positioning). Существует большое количество алгоритмов высокоточного абсолютного позиционирования, отличающихся используемыми моделями воздействующих факторов, способом разрешения неоднозначности фазовых псевдодальномерных измерений, составом уточняемых параметров и другими нюансами (далее - РРР).
Основные принципы метода РРР и применяемые модели описаны в работах [12], [13], варианты алгоритмов с целочисленным разрешением фазовой неоднозначности - в работах [14], [15]. Существуют как коммерческие, так к свободно распространяемые реализации метода РРР с открытым исходным кодом (например, RTKLib, GPSTk, PPPLib и другие). Также есть ряд публично доступных онлайн-сервисов, которые позволяют любому желающему получить РРР решение, загрузив файл с псевдодальномерными измерениями в формате RINEX (например, NRCAN РРР, GAPS, APPS, magicPPP).
Общим для данных алгоритмов является использование в качестве исходной измерительной информации безионосферных комбинаций кодовых и фазовых измерений, а также применение в решении высокоточных апостериорных орбит КА и поправок к ШВ КА. Это позволяет практически полностью исключить влияние ионосферы и космического сегмента ГНСС на точность получаемых оценок. В ходе решения одновременно с разностью ШВ также уточняются координаты фазового центра ГНСС антенны и другие параметры. В качестве высокоточных эфемерид могут применяться публично доступные данные центров анализа ГНСС информации или сводные продукты международной службы ГНСС (англ. IGS - International GNSS Service). В зависимости от точности оперативность продуктов IGS составляет от нескольких часов до двух недель после окончания соответствующих суток UTC.
где k - коэффициент, определяемый принятой доверительной вероятностью;
5.2 Методы оценки относительной погрешности меры частоты (относительной разности частот)
При оценке относительной разности частот не предъявляются требования к калибровке приемника сигналов ГНСС, также нет необходимости измерять задержку импульсного сигнала 1 Гц до входа в приемник или в измеритель интервалов времени.
5.2.1 Методы оценки относительной погрешности меры частоты (относительной разности частот) с применением приемников сигналов ГНСС, оснащенных выходом высокочастотных синусоидальных сигналов
Для реализации данного метода используются приемники сигналов ГНСС, оснащенные выходом высокочастотных синусоидальных сигналов со стандартными действительными значениями частоты (1, 5, 10 МГц и т.д.). При выполнении измерений применяется один приемник сигналов ГНСС, размещаемый в месте дислокации исследуемого СЧВ.
Обязательным условием в данном случае является наличие у приемника нормированной метрологической характеристики, характеризующей пределы допускаемой относительной погрешности меры частоты (относительной разности частот) выходных высокочастотных синусоидальных сигналов.



где k - коэффициент, определяемый принятой доверительной вероятностью;
5.2.2 Методы оценки относительной погрешности меры частоты (относительной разности частот) на основе оценок разности ШВ
Исходными данными для оценки относительной погрешности меры частоты (относительной разности частот) являются значения смещений (разности) ШВ, вычисленные по формулам (3), (5), (7) или (8).
Определение НСП оценки относительной разности частот необходимо осуществлять на основе значений составляющих НСП, используемых для расчетов смещений ШВ. При этом следует исключить все составляющие, имеющие постоянное значение, а именно задержки сигналов ГНСС в приемном тракте и задержки импульсных сигналов 1 Гц в кабелях.
Примечания
1 При оценке относительной разности частот с применением приемников сигналов ГНСС, оснащенных выходом высокочастотных синусоидальных сигналов, для повышения точности измерений рекомендуется проводить повторные измерения и из полученного ряда вычислять среднее арифметическое значение.
2 Рекомендации по выбору интервалов времени измерения и интервалов времени наблюдений в зависимости от требуемой точности измерений приведены в [16].
5.3 Методы оценки среднего относительного изменения (дрейфа) частоты
Примечания
1 Как правило, среднее относительное изменение (дрейф) частоты нормируют при конкретно определенных интервалах времени измерения; например, среднее суточное относительное изменение частоты, в данном случае для оценки среднего относительного изменения (дрейфа) частоты рекомендуемый интервал времени наблюдений составляет 10 суток.
2 Для повышения точности измерений рекомендуется использование всех значений из полученного по формулам (10) и (12) ряда. В этом случае оценку среднего относительного изменения (дрейфа) частоты осуществляют в соответствии с приложением 5 [16].
5.4 Методы оценки относительной нестабильности частоты
Нестабильность меры частоты - это характеристика случайных и систематических изменений частоты во времени. Для количественного описания нестабильности меры частоты применяют ряд характеристик.
В ГОСТ 8.567 в качестве количественных характеристик нестабильности частоты приведены СКО и СКДО частоты.
Исходными данными для оценки нестабильности частоты являются значения относительной разности частот, исследуемого и опорного СЧВ.


Примечания
1 Результаты оценки нестабильности частоты зависят от интервалов времени измерения, выборки и наблюдения. Как правило, интервалы времени измерения и выборки принимают равными, а интервал времени наблюдения принимают таким, чтобы количество результатов измерений на интервале времени наблюдений составляло не менее 10.
2 Не рекомендуется применять термины "кратковременная" или "долговременная" нестабильность частоты без указания значений интервалов времени измерения (выборки) и времени наблюдений.
Приложение А
(обязательное)
Схема измерений при оценке смещений (разности) шкал времени стандартов частоты и (или) времени с применением приемников сигналов глобальных навигационных спутниковых систем, оснащенных выходом 1 Гц в абсолютном режиме
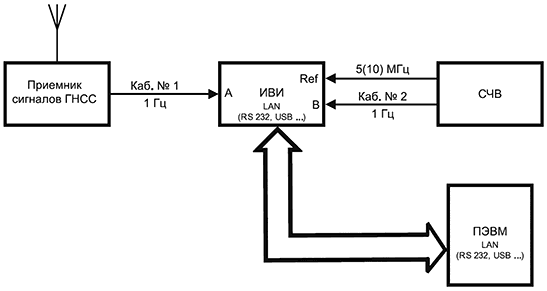 |
Рисунок А.1
Приложение Б
(обязательное)
Схема измерений при оценке смещений (разности) шкал времени стандартов частоты и (или) времени с использованием псевдодальномерных кодовых измерений в абсолютном режиме
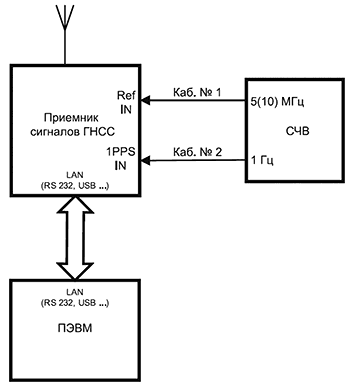 |
Рисунок Б.1
Приложение В
(обязательное)
Схема измерений при оценке смещений (разности) шкал времени стандартов частоты и (или) времени с использованием псевдодальномерных кодовых измерений в дифференциальном режиме
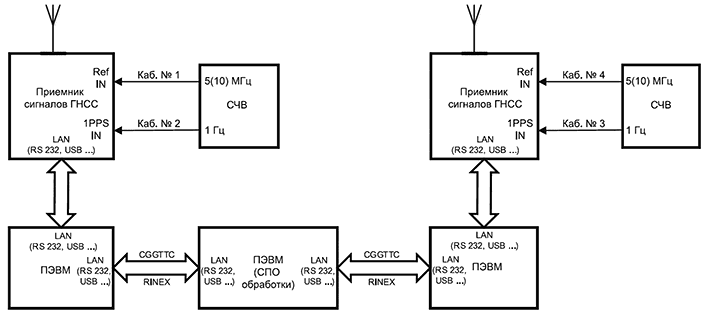 |
Рисунок В.1
Приложение Г
(обязательное)
Схема измерений при оценке относительной разности частот с применением приемников сигналов глобальных навигационных спутниковых систем, оснащенных выходом высокочастотных сигналов
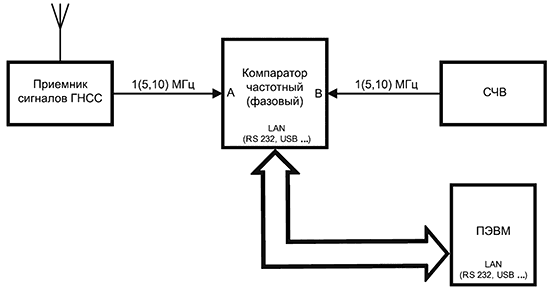 |
Рисунок Г.1
Библиография
[1] | Федеральный закон от 3 июня 2011 г. № 107-ФЗ "Об исчислении времени" | |
[2] | Постановление Правительства Российской Федерации от 23 марта 2001 г. № 225 "Об утверждении Положения о Государственной службе времени, частоты и определения параметров вращения Земли" | |
[3] | Ф.Риле. Стандарты частоты. Принципы и приложения. Перевод с английского Н.Н.Колачевского, Москва, Физматлит, 2009 | |
[4] | К.Одуан, Б.Гино. Измерение времени. Основы GPS, Москва, Техносфера, 2002 | |
[5] | RINEX The Receiver Independent Exchange Format Version 3.03 International GNSS Service (IGS), RINEX Working Group and Radio Technical Commission for Maritime Services Special Committee 104 (RTCM-SC104), July 14th, 2015 Acknowledgment: RINEX Version 3.02 and 3.03 is based on RINEX Version 3.01 which was developed by: Werner Gurtner, Astronomical Institute of the University of Bern, Switzerland and Lou Estey, UNAVCO, Boulder Colorado, USA | |
[6] | D.W.Allan, M.A.Weiss. Requires Adobe Acrobat ReaderAccurate Time and Frequency Transfer During Common-View of a GPS Satellite, 34th Annual Frequency Control Symposium. Pp.334-346. May. 1980 | |
[7] | V.S.Zhang, T.E.Parker, M.A.Weiss, F.M.Vannicola. Requires Adobe Acrobat Reader Multi-Channel GPS/GLONASS Common-View between NIST and USNO, IEEE International Frequency Control Symposium. Pp.598-606. June 2000 | |
[8] | M.A.Lombardi, L.M.Nelson, A.N. Novick, VS. Zhang. Requires Adobe Acrobat ReaderTime and Frequency Measurements Using the Global Positioning System, Cal. Lab. Int. J. Metrology. Pp.26-33 (July-September 2001) | |
[9] | J.Azoubib, W.Lewandowski. CGGTTS GPS/GLONASS Data Format Version 02 | |
[10] | P.Defraigne, G.Petit. CGGTTS-Version 2E: an extended standard for GNSS Time Transfer. Royal Observatory of Belgium, BIPM | |
[11] | Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах L1, L2. (Редакция 5.1), Москва, 2008 | |
[12] | J.F.Zumberge, M.B.Heflin, D.C.Jefferson, M.M.Watkins, F.H.Webb. Precise point positioning for the efficient and robust analysis of GPS data from large networks, J. Geophys. Res., 1997, vol. 102, no. B3. Pp.5005-5017 | |
[13] | J.Kouba. A Guide to Using International GNSS Service (IGS) Products. 2009 | |
[14] | P.Collins, S.Bisnath, F.Lahaye, and P. (2010). "Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing", NAVIGATION: Journal of The Institute of Navigation, Vol. 57, No. 2, Summer 2010. Pp.123-135 | |
[15] | S.Loyer, F.Perosanz, F.Mercier et al. Zero-difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center. J Geod 86. Pp.991-1003 (2012) | |
[16] | Рекомендации по метрологии МИ 2188-92 | Государственная система обеспечения единства измерений. Меры частоты и времени. Методика поверки |
УДК 523.786:842(08):006.354 | ОКС 17.020 |
Ключевые слова: стандарты частоты и времени, методы оценки, метрологические характеристики, глобальная спутниковая система ГЛОНАСС, время, частота, шкала времени, оценка метрологических характеристик стандартов частоты и времени, методы оценки смещений (разности) шкал времени | |
{kind=link}