ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТР 60.2.2.2—2023 (IEC/TR 60601-4-1:2017)
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Часть 4-1
Руководство по медицинским электрическим изделиям и медицинским электрическим системам, обладающим некоторым уровнем автономности
(IEC/TR 60601 -4-1:2017, Medical electrical equipment — Part 4-1: Guidance and interpretation — Medical electrical equipment and medical electrical systems employing a degree of autonomy, MOD)
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 857-ст
4 Настоящий стандарт является модифицированным по отношению к международному документу IEC/TR 60601-4-1:2017 «Изделия медицинские электрические. Часть 4-1. Руководство и интерпретация. Медицинские электрические изделия и медицинские электрические системы с некоторой степенью автономности» (IEC/TR 60601-4-1:2017 «Medical electrical equipment — Part 4-1: Guidance and interpretation — Medical electrical equipment and medical electrical systems employing a degree of autonomy», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту, а также путем изменения его структуры для приведения в соответствие с правилами, установленными в ГОСТ 1.5—2001 (подразделы 4.2 и 4.3).
Наименование настоящего стандарта изменено относительно наименования указанного международного документа для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сопоставление структуры настоящего стандарта со структурой указанного международного документа приведено в дополнительном приложении ДА.
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДБ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© IEC, 2017 © Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 УРОВЕНЬ АВТОНОМНОСТИ
4.1 Общие положения
4.2 Методология определения УРОВНЯ АВТОНОМНОСТИ
4.3 Взаимосвязь между УРОВНЕМ АВТОНОМНОСТИ и РИСКОМ
5 СТАНДАРТЫ НА ПРОЦЕССЫ, поддерживающие УРОВЕНЬ АВТОНОМНОСТИ
5.1 Общие положения
5.2 ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
5.3 УПРАВЛЕНИЕ РИСКОМ
5.4 Вопросы ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ МЭИ или МЭС, обладающих высоким УРОВНЕМ АВТОНОМНОСТИ
5.5 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ и ЖИЗНЕННЫЙ ЦИКЛ разработки программного обеспечения (ГОСТ Р МЭК 62304)
5.6 Применение МЕНЕДЖМЕНТА РИСКА в информационно-вычислительных сетях с медицинскими приборами
6 ОСНОВНАЯ БЕЗОПАСНОСТЬ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, связанные с УРОВНЕМ АВТОНОМНОСТИ
6.1 Общие положения
6.2 ОСНОВНАЯ БЕЗОПАСНОСТЬ, связанная с УРОВНЕМ АВТОНОМНОСТИ
6.3 ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, связанные с УРОВНЕМ АВТОНОМНОСТИ
Приложение А (справочное) Примеры методов классификации УРОВНЕЙ АВТОНОМНОСТИ
Приложение В (справочное) Примеры применения УРОВНЕЙ АВТОНОМНОСТИ к МЭИ/МЭС
Приложение С (справочное) Характеристики БЕЗОПАСНОСТИ ПАЦИЕНТОВ, учитываемые в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ
Приложение ДА (справочное) Сопоставление структуры настоящего стандарта со структурой примененного в нем международного документа
Приложение ДБ (справочное) Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном документе
Библиография
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Безопасность» и распространяется на сервисные медицинские роботы.
В настоящий стандарт внесены следующие технические отклонения по отношению к IEC/TR 60601-4-1:2017:
- настоящий стандарт оформлен с соблюдением правил, установленных в ГОСТ Р 1.5, в соответствии с ГОСТ Р 1.7—2014 (пункт 7.2);
- измененные отдельные фразы (слова, ссылки) выделены в тексте курсивом;
- нормативные ссылки на международные стандарты заменены ссылками на соответствующие национальные стандарты Российской Федерации и межгосударственные стандарты, действующие в качестве национальных;
- в настоящем стандарте вместо аббревиатуры DOA, использованной в тексте примененного международного документа, использовано полное написание данного термина УРОВЕНЬ АВТОНОМНОСТИ;
- в разделе 3 определения терминов приведены в соответствии с национальными стандартами;
- терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5—2001;
- в настоящий стандарт не включены справочные приложения А, В, F и G, относящиеся к истории разработки примененного международного документа и не имеющие прямого отношения к положениям настоящего стандарта, и в тексте удалены ссылки на данные приложения;
- в библиографию не включены ссылки на международные стандарты, которым соответствуют национальные стандарты Российской Федерации и межгосударственные стандарты, действующие в качестве национальных, приведенные в разделе 2.
ГОСТ Р 60.2.2.2—2023 (IEC/TR 60601-4-1:2017)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ИЗДЕЛИЯ МЕДИЦИНСКИЕ ЭЛЕКТРИЧЕСКИЕ
Часть 4-1
Руководство по медицинским электрическим изделиям и медицинским электрическим системам, обладающим некоторым уровнем автономности
Robots and robotic devices. Medical electrical equipment. Part 4-1. Guidance on medical electrical equipment and medical electrical systems employing a degree of autonomy
Дата введения — 2024—01—01
1 Область применения
Настоящий стандарт предназначен для оказания помощи ИЗГОТОВИТЕЛЯМ в принятии ключевых решений и действий, которые необходимо предпринять для осуществления детального МЕНЕДЖМЕНТА РИСКА и ПРОЦЕССОВ ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ для МЕДИЦИНСКИХ ЭЛЕКТРИЧЕСКИХ ИЗДЕЛИЙ или МЕДИЦИНСКИХ ЭЛЕКТРИЧЕСКИХ СИСТЕМ (МЭИ или МЭС), обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ.
Настоящий стандарт определяет термин УРОВЕНЬ АВТОНОМНОСТИ для МЭИ или МЭС и МЕДИЦИНСКОГО РОБОТА и предоставляет руководства:
- по методологиям реализации ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА и ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ для МЭИ и МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ;
- анализу ОСНОВНОЙ БЕЗОПАСНОСТИ и ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК для МЭИ и МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ.
Если не оговорено отдельно, то в настоящем стандарте МЭИ и МЭС рассматриваются вместе.
ИЗГОТОВИТЕЛЮ МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ, необходимо разработать и изготовить МЭИ или МЭС, соответствующие ПРЕДУСМОТРЕННОМУ ПРИМЕНЕНИЮ и не подверженные неприемлемому РИСКУ в течение ЖИЗНЕННОГО ЦИКЛА.
Настоящий стандарт определяет руководство, помогающее ИЗГОТОВИТЕЛЮ соответствовать требованиям ГОСТ Р МЭК 60601-1 при создании МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ. Настоящий стандарт также является руководством для разработчиков будущих стандартов.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ISO 14971—2011 Изделия медицинские. Применение менеджмента риска к медицинским изделиям
Издание официальное
ГОСТ Р ИСО 80601-2-12 Изделия медицинские электрические. Часть 2-12. Частные требования безопасности с учетом основных функциональных характеристик к аппаратам искусственной вентиляции легких для интенсивной терапии
ГОСТ Р ИСО 80601-2-55 Изделия медицинские электрические. Часть 2-55. Частные требования безопасности с учетом основных функциональных характеристик к мониторам дыхательных смесей
ГОСТ Р МЭК 60601-1—2022 Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик
ГОСТ Р МЭК 60601-2-1—2013 Изделия медицинские электрические. Часть 2-1. Частные требования безопасности с учетом основных функциональных характеристик к электронным ускорителям, работающим в диапазоне от 1 до 50 МэВ
ГОСТ Р МЭК 60601-2-10 Изделия медицинские электрические. Часть 2-10. Частные требования безопасности с учетом основных функциональных характеристик к стимуляторам нервов и мышц
ГОСТ Р МЭК 60601-2-16 Изделия медицинские электрические. Часть 2-16. Частные требования безопасности с учетом основных функциональных характеристик к аппаратам для гемодиализа, гемодиафильтрации и гемофильтрации
ГОСТ Р МЭК 60601-2-23 Изделия медицинские электрические. Часть 2-23. Частные требования безопасности с учетом основных функциональных характеристик к приборам для чрескожного мониторинга парциального давления
ГОСТ Р МЭК 60601-2-25 Изделия медицинские электрические. Часть 2-25. Частные требования безопасности с учетом основных функциональных характеристик к электрокардиографам
ГОСТ Р МЭК 60601-2-27 Изделия медицинские электрические. Часть 2-27. Частные требования безопасности с учетом основных функциональных характеристик к электрокардиографическим мониторам
ГОСТ Р МЭК 60601-2-34 Изделия медицинские электрические. Часть 2-34. Частные требования безопасности с учетом основных функциональных характеристик к приборам для инвазивного мониторинга кровяного давления
ГОСТ Р МЭК 60601-2-47 Изделия медицинские электрические. Часть 2-47. Частные требования безопасности с учетом основных функциональных характеристик к амбулаторным электрокардиографическим системам
ГОСТ Р МЭК 60601-2-49 Изделия медицинские электрические. Часть 2-49. Частные требования безопасности с учетом основных функциональных характеристик к многофункциональным мониторам пациента
ГОСТ Р МЭК 60601-2-66—2021 Аппаратура электрическая медицинская. Часть 2-66. Частные требования к базовой безопасности и основным эксплуатационным характеристикам слуховых аппаратов и систем слуховых аппаратов
ГОСТ Р МЭК 62304 Изделия медицинские. Программное обеспечение. Процессы жизненного цикла
ГОСТ Р МЭК 62366-1—2021 Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности
ГОСТ Р МЭК 80001-1 Информатизация здоровья. Менеджмент рисков в информационно-вычислительных сетях с медицинскими приборами. Часть 1. Роли, ответственности и действия
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1_
АВТОМАТИЧЕСКИЙ (AUTOMATIC): Процесс или оборудование, которые при определенных условиях функционируют без вмешательства человека.
[ГОСТ Р МЭК 62443-3-3—2016, пункт 3.1.7]
Примечание — Некоторые, но не все МЭИ и МЭС выполняют функции с некоторым УРОВНЕМ АВТОНОМНОСТИ, заявленные как АВТОМАТИЧЕСКИЕ. Из-за возможной путаницы рекомендуется не использовать термин «АВТОМАТИЧЕСКИЙ» при ссылке на УРОВНИ АВТОНОМНОСТИ МЭИ или МЭС.
3.2
АВТОНОМНОСТЬ (AUTONOMY): Способность выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека.
[ГОСТ Р 60.0.0.4—2023, статья 3.2]
Примечания
1 Термин «АВТОНОМНОСТЬ» обычно используют для обозначения понятий «нулевой УРОВЕНЬ АВТОНОМНОСТИ» или «максимальный УРОВЕНЬ АВТОНОМНОСТИ» без допущения промежуточных значений. Поэтому рекомендуется с осторожностью использовать термин «АВТОНОМНОСТЬ» и, где возможно, применять вместо него термин «УРОВЕНЬ АВТОНОМНОСТИ».
2 Термины «отсутствие АВТОНОМНОСТИ» и «полная АВТОНОМНОСТЬ» могут быть использованы для обозначения понятий «нулевой УРОВЕНЬ АВТОНОМНОСТИ» и «максимальный УРОВЕНЬ АВТОНОМНОСТИ».
3 .3 АВТОНОМНЫЙ (AUTONOMOUS): Обладающий полной АВТОНОМНОСТЬЮ.
Примечания
1 Термин «АВТОНОМНЫЙ» обычно используется для обозначения понятия «имеющий высокий УРОВЕНЬ АВТОНОМНОСТИ», но без определения того, какой уровень является высоким. Рекомендуется с осторожностью использовать термин «АВТОНОМНЫЙ».
2 Данное определение термина «АВТОНОМНЫЙ» сформулировано с учетом определения из [1], статья 3.1.
3.4
АНАЛИЗ РИСКА (RISK ANALYSIS): Систематическое использование имеющейся информации для выявления ОПАСНОСТЕЙ и определения РИСКА.
[ГОСТ ISO 14971—2021, пункт 3.19]
3.5
БЕЗОПАСНОСТЬ (SAFETY): Отсутствие недопустимого РИСКА. [ГОСТ ISO 14971—2021, пункт 3.26]
3.6 ВАРИАНТ (OPTION): Стратегия выполнения ЗАДАЧИ, обеспечивающая выполнение выбранной КЛИНИЧЕСКОЙ ФУНКЦИИ.
3.7
ВРЕД (HARM): Травма, ущерб здоровью людей или животных, ущерб имуществу или окружающей среде.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.38]
3.8 ВЫБИРАТЬ (SELECT): Решить в пользу конкретного ВАРИАНТА из всех РАЗРАБОТАННЫХ.
3.9 ВЫПОЛНЯТЬ (EXECUTE): Реализовать выбранный ВАРИАНТ.
3.10
ЖИЗНЕННЫЙ ЦИКЛ (LIFE-CYCLE): Все стадии существования медицинского изделия от первоначальной концепции до вывода из эксплуатации и утилизации.
[ГОСТ ISO 14971—2021, пункт 3.8]
3.11
ЗАДАЧА (TASK): Отдельная часть работы, которую необходимо выполнить. [ГОСТ Р МЭК 62304—2013, пункт 3.31]
3.12
ИЗГОТОВИТЕЛЬ (MANUFACTURER): Физическое или юридическое лицо, отвечающее за проектирование, изготовление, упаковывание или маркирование МЭ ИЗДЕЛИЙ, сборку МЭ СИСТЕМ или модификацию МЭ ИЗДЕЛИЯ или МЭ СИСТЕМЫ независимо от того, выполняет ли эти операции вышеупомянутое лицо или другое(ие) лицо(а) по его поручению.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.55]
3.13 КЛИНИЧЕСКАЯ ФУНКЦИЯ (CLINICAL FUNCTION): Медицинское действие, для выполнения которого предназначено МЭИ или МЭС.
3.14 НАБЛЮДАТЬ (MONITOR): Собирать и интерпретировать необходимую информацию для понимания состояния МЭИ или МЭС, ПАЦИЕНТА, ОПЕРАТОРА или окружающей среды.
3.75
МЕДИЦИНСКАЯ ЭЛЕКТРИЧЕСКАЯ СИСТЕМА; МЭ СИСТЕМА (MEDICAL ELECTRICAL SYSTEM; ME SYSTEM): Совокупность изделий, определенная ИЗГОТОВИТЕЛЕМ, в которой по крайней мере одно изделие является МЭ ИЗДЕЛИЕМ и изделия связаны между собой ФУНКЦИОНАЛЬНЫМИ СОЕДИНЕНИЯМИ или путем использования МНОГОРОЗЕТОЧНОГО СЕТЕВОГО СОЕДИНИТЕЛЯ.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.64]
3.16____________________________________________________________________________________________
МЕДИЦИНСКИЙ РОБОТ (MEDICAL ROBOT): РОБОТ, предназначенный для использования в качестве медицинского изделия или медицинской системы.
[ГОСТР 60.0.0.4—2022, статья 3.8]
3.17
МЕДИЦИНСКОЕ ЭЛЕКТРИЧЕСКОЕ ИЗДЕЛИЕ; МЭ ИЗДЕЛИЕ (MEDICAL ELECTRICAL EQUIPMENT; ME EQUIPMENT): Электрическое изделие, имеющее РАБОЧУЮ ЧАСТЬ, передающее энергию к ПАЦИЕНТУ или от него либо обнаруживающее передачу этой энергии к ПАЦИЕНТУ или от него и которое:
а) имеет не более одного соединения с ПИТАЮЩЕЙ СЕТЬЮ и
Ь) предназначено его ИЗГОТОВИТЕЛЕМ:
1) для диагностики, лечения или контроля состояния ПАЦИЕНТА или
2) компенсации или облегчения заболеваний, ранений и утраты работоспособности.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.63]
3.18
МЕНЕДЖМЕНТ РИСКА (RISK MANAGEMENT): Систематическое применение политики, ПРОЦЕДУР и практических методов менеджмента для решения ЗАДАЧ анализа, оценивания, управления и мониторинга РИСКА.
[ГОСТ ISO 14971—2021, пункт 3.24]
3.19 НЕПРАВИЛЬНОЕ ИСПОЛЬЗОВАНИЕ (MISUSE): Использование МЭИ или МЭС, не предусмотренное ИЗГОТОВИТЕЛЕМ.
Примечание — Данный термин включает как прогнозируемое НЕПРАВИЛЬНОЕ ИСПОЛЬЗОВАНИЕ, так и непрогнозируемое НЕПРАВИЛЬНОЕ ИСПОЛЬЗОВАНИЕ.
3.20
НОРМАЛЬНОЕ СОСТОЯНИЕ (NORMAL CONDITION): Состояние, при котором все средства, предусмотренные для защиты от ОПАСНОСТЕЙ, исправны.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.70]
3.21________________________________________________________________________________________________
ОЖИДАЕМЫЙ СРОК СЛУЖБЫ (EXPECTED SERVICE LIFE): Временной интервал, указываемый ИЗГОТОВИТЕЛЕМ, в течение которого МЭ ИЗДЕЛИЕ или МЭ СИСТЕМА остается безопасным(ой) для использования (т. е. поддерживается ОСНОВНАЯ БЕЗОПАСНОСТЬ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ).
Примечание — В период ОЖИДАЕМОГО СРОКА СЛУЖБЫ может потребоваться техническое обслуживание.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.28]
3.22
ОПАСНАЯ СИТУАЦИЯ (HAZARDOUS SITUATION): Обстоятельства, при которых люди, имущество или окружающая среда могут подвергаться одному или нескольким видам ОПАСНОСТИ.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.40]
3.23
ОПАСНОСТЬ (HAZARD): Потенциальный источник ВРЕДА. [ГОСТ Р МЭК 60601-1—2022, пункт 3.39] 3.24
ОПЕРАТОР (OPERATOR): Лицо, работающее с изделием. [ГОСТ Р МЭК 60601-1—2022, пункт 3.73]
3.25
ОСНОВНАЯ БЕЗОПАСНОСТЬ (BASIC SAFETY): Устранение недопустимого РИСКА, непосредственно вызванного физическими ОПАСНОСТЯМИ, когда МЭ ИЗДЕЛИЕ используется в НОРМАЛЬНОМ СОСТОЯНИИ или при УСЛОВИИ ЕДИНИЧНОГО НАРУШЕНИЯ.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.10]
3.26
ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ (ESSENTIAL PERFORMANCE): Не относящиеся к ОСНОВНОЙ БЕЗОПАСНОСТИ характеристики клинической функции, отсутствие или ухудшение которых сверх установленных ИЗГОТОВИТЕЛЕМ пределов приводит к недопустимому РИСКУ.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.27]
3.27
ОЦЕНИВАНИЕ РИСКА (RISK EVALUATION): Процесс сравнения РИСКА, который уже определен, с установленными критериями РИСКА для определения допустимости РИСКА.
[ГОСТ ISO 14971—2021, пункт 3.23]
3.28
ОЦЕНКА РИСКА (RISK ASSESSMENT): Полный ПРОЦЕСС АНАЛИЗА и ОЦЕНИВАНИЯ РИСКА. [ГОСТ ISO 14971—2021, пункт 3.20]
3.29
ПАЦИЕНТ (PATIENT): Живое существо (человек или животное), подвергающееся медицинскому обследованию или лечению.
Примечание — ПАЦИЕНТ может быть ОПЕРАТОРОМ.
[ГОСТР МЭК 60601-1—2022, пункт 3.76]
3.30
ПЕРЕДВИЖНОЕ (MOBILE): Термин, связанный с ТРАНСПОРТИРУЕМЫМ ИЗДЕЛИЕМ, которое после установки и ввода в эксплуатацию предназначено для перемещения из одного места в другое на собственных колесах или с использованием эквивалентных средств.
[ГОСТ Р МОК 60601-1—2022, пункт 3.65]
3.31
ПИТАЮЩАЯ СЕТЬ (SUPPLY MAINS): Источник электрической энергии, не являющийся частью МЭ ИЗДЕЛИЯ или МО СИСТЕМЫ.
Примечание — Этот термин относится также к аккумуляторным и преобразовательным системам, устанавливаемым в санитарных машинах и т. п.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.120]
3.32
ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ/ПРЕДУСМОТРЕННОЕ НАЗНАЧЕНИЕ (INTENDED USE/ INTENDED PURPOSE): Применение, для которого процесс, продукция или услуга предусмотрен(а) в соответствии со спецификациями, инструкциями и информацией, предоставленными ИЗГОТОВИТЕЛЕМ.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.44]
3.33
ПРОГРАММИРУЕМАЯ ЭЛЕКТРИЧЕСКАЯ МЕДИЦИНСКАЯ СИСТЕМА; ПЭМС (PROGRAMMABLE ELECTRICAL MEDICAL SYSTEM; PEMS): МЭ ИЗДЕЛИЕ или МЭ СИСТЕМА, содержащее(ая) одну или несколько ПРОГРАММИРУЕМЫХ ЭЛЕКТРОННЫХ ПОДСИСТЕМ (ПЭПС).
[ГОСТ Р МЭК 60601-1—2022, пункт 3.90]
3.34
ПРОГРАММИРУЕМАЯ ЭЛЕКТРОННАЯ ПОДСИСТЕМА; ПЭПС (PROGRAMMABLE ELECTRONIC SUBSYSTEM; PESS): Система, основанная на использовании одного или нескольких центральных процессоров, включая их программное обеспечение и интерфейсы.
[ГОСТРМЭК 60601-1—2022, пункт 3.91]
3.35
ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ/ЧЕЛОВЕЧЕСКОГО
ФАКТОРА (USABILITY ENGINEERING/HUMAN FACTORS ENGINEERING): Применение знаний о поведении человека, его возможностях, ограничениях и других его характеристиках к проектированию МЕДИЦИНСКОГО ИЗДЕЛИЯ (включая программное обеспечение), систем и ЗАДАЧ для достижения достаточной ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
Примечание — Достижение достаточной ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ может обеспечить допустимый уровень РИСКА, связанный с применением.
[ГОСТ Р МЭК 62366-1—2021, пункт 3.17]
3.36
ПРОЦЕСС (PROCESS): Совокупность взаимосвязанных и взаимодействующих видов деятельности, в которых используются входные данные для достижения намеченного результата.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.89]
3.37
РАБОЧАЯ ЧАСТЬ (APPLIED PART): Часть МЭ ИЗДЕЛИЯ, которая при нормальной эксплуатации МЭ ИЗДЕЛИЯ или МЭ СИСТЕМЫ обязательно должна входить в непосредственный контакт с ПАЦИЕНТОМ для выполнения требуемых функций.
[ГОСТРМЭК 60601-1—2022, пункт 3.8]
3.38 РАЗРАБАТЫВАТЬ (GENERATE): Сформулировать возможные ВАРИАНТЫ на основе результатов выполнения ЗАДАЧИ НАБЛЮДАТЬ для достижения поставленных целей.
3.39
РИСК (RISK): Сочетание вероятности причинения ВРЕДА и ТЯЖЕСТИ этого ВРЕДА.
[ГОСТ ISO 14971—2021, пункт 3.18]
3.40
РОБОТ (ROBOT): Программируемый исполнительный механизм, обладающий определенным УРОВНЕМ АВТОНОМНОСТИ и предназначенный для выполнения перемещения, манипулирования или позиционирования.
[ГОСТ Р 60.0.0.4—2023, статья 3.1]
3.41 СТАНДАРТ НА ПРОЦЕСС (PROCESS STANDARD): Стандарт, устанавливающий рамки, в которых ИЗГОТОВИТЕЛЬ может конструировать и разрабатывать МЭИ или МЭС, обеспечивая согласованные БЕЗОПАСНОСТЬ и эффективность.
Примечание — См. [2], статья 3.3.2.
3.42
ТРАНСПОРТИРУЕМОЕ (TRANSPORTABLE): Термин, относящийся к изделию, которое после установки и ввода в эксплуатацию предназначено для легкого перемещения без существенного ограничения по положению с одного места в другое, будучи присоединенным к источнику питания или без присоединения к нему.
[ГОСТ Р МЭК 60601-1—2022, пункт 3.130]
3.43
ТЯЖЕСТЬ (SEVERITY): Мера возможных последствий ОПАСНОСТИ. [ГОСТ ISO 14971—2021, пункт 3.27]
3.44
УПРАВЛЕНИЕ РИСКОМ (RISK CONTROL): ПРОЦЕСС, в ходе которого принимают решения и выполняют меры, посредством которых РИСКИ снижаются до установленных уровней или поддерживаются в пределах установленных уровней.
[ГОСТ ISO 14971—2021, пункт 3.21]
3.45
УРОВЕНЬ АВТОНОМНОСТИ (DEGREE OF AUTONOMY; DOA): Условная категория, позволяющая ранжировать сервисных мобильных роботов по степени их способности функционировать без вмешательства человека.
[ГОСТ Р 60.6.0.1—2021, статья 37]
3.46 УРОВЕНЬ РАЗВИТИЯ ТЕХНИКИ (STATE OF THE ART): Достигнутый к данному моменту времени уровень технических возможностей применительно к продукции, ПРОЦЕССАМ и услугам, являющийся результатом обобщенных достижений науки, техники и практического опыта.
Примечание — См. [3], статья 1.4.
3.47
УСЛОВИЕ ЕДИНИЧНОГО НАРУШЕНИЯ (SINGLE FAULT CONDITION): Состояние МЭ ИЗДЕЛИЯ, при котором одно средство для снижения РИСКА имеет дефект или существует одно ненормальное условие.
[ГОСТ Р МОК 60601-1—2022, пункт 3.116]
3.48 ФИЗИОЛОГИЧЕСКАЯ ПЕРЕМЕННАЯ (PHYSIOLOGICAL VARIABLE): Число или состояние, полученное от ПАЦИЕНТА, значение которого может изменяться и, как правило, может быть измерено.
Примечание —См. [4], статья 3.21.
3.49 ФИЗИОЛОГИЧЕСКИЙ КОНТРОЛЛЕР С ОБРАТНОЙ СВЯЗЬЮ (PHYSIOLOGICAL CLOSED-LOOP CONTROLLER): Элемент физиологической системы управления с обратной связью, в котором значение, полученное по обратной связи, сравнивается с эталонным значением, и их разность преобразуется в выходной сигнал контроллера.
Примечание — См. [4], статья 3.20.
3.50
ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ (USABILITY): Характеристика ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА, которая облегчает использование и тем самым устанавливает РЕЗУЛЬТАТИВНОСТЬ, ЭФФЕКТИВНОСТЬ и степень удовлетворенности ПОЛЬЗОВАТЕЛЯ в СРЕДЕ ПРИМЕНЕНИЯ.
[ГОСТ Р МОК 62366-1—2021, статья 3.16]
4 УРОВЕНЬ АВТОНОМНОСТИ
4.1 Общие положения
В данном разделе представлено руководство по классификации АВТОНОМНОСТИ с помощью введения понятия УРОВНЯ АВТОНОМНОСТИ. При этом применены следующие предположения:
- УРОВЕНЬ АВТОНОМНОСТИ может изменяться от низкого до высокого;
- УРОВНИ АВТОНОМНОСТИ могут быть классифицированы с разных точек зрения (например, с точки зрения решаемой ЗАДАЧИ, с точки зрения выполняемой КЛИНИЧЕСКОЙ ФУНКЦИИ, с точки зрения МЭИ или МЭС) в зависимости от того, где и как они используются в МЭИ или МЭС.
Примеры методов классификации приведены в приложении А. Следует отметить, что представленные в приложении А методы не являются исчерпывающими, так как могут быть разработаны и другие методы классификации УРОВНЕЙ АВТОНОМНОСТИ.
4.2 Методология определения УРОВНЯ АВТОНОМНОСТИ
Если АВТОНОМНОСТЬ применяют для реализации ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ МЭИ или МЭС, то следует проанализировать возможные УРОВНИ АВТОНОМНОСТИ.
Методика классификации УРОВНЕЙ АВТОНОМНОСТИ основана на подходе, при котором выделяют следующие четыре основные функции (или ЗАДАЧИ):
а) «НАБЛЮДАТЬ»;
Ь) «РАЗРАБАТЫВАТЬ ВАРИАНТЫ»;
с) «ВЫБИРАТЬ ВАРИАНТ»;
d) «ВЫПОЛНЯТЬ выбранный ВАРИАНТ».
При реализации каждой из этих основных ЗАДАЧ могут быть использованы разные УРОВНИ АВТОНОМНОСТИ. При использовании данной методики классификации результирующий УРОВЕНЬ АВТОНОМНОСТИ МЭИ или МЭС представляет собой композицию УРОВНЕЙ АВТОНОМНОСТИ, достигнутых при выполнении отдельных функций.
Примеры методов классификации УРОВНЕЙ АВТОНОМНОСТИ представлены в приложении А, где в А. 7 представлен описательный метод для определения изменения УРОВНЯ АВТОНОМНОСТИ, который может быть применен в разных стратегиях проведения анализа.
В А.2 представлен бинарный метод классификации УРОВНЕЙ АВТОНОМНОСТИ, в соответствии с которым каждой функции присваивают значение либо «ОПЕРАТОР» (низкий УРОВЕНЬ АВТОНОМНОСТИ), либо «МЭИ» (высокий УРОВЕНЬ АВТОНОМНОСТИ), в зависимости от того, как реализовано выполнение данной функции. В таблице А.2 приведены значения результирующего УРОВНЯ АВТОНОМНОСТИ МЭИ или МЭС в зависимости от значений каждой из основных функций.
В А.З представлен метод классификации УРОВНЕЙ АВТОНОМНОСТИ для основных функций, основанный на весовых коэффициентах, обеспечивающий формирование взвешенного УРОВНЯ АВТОНОМНОСТИ для МЭИ или МЭС.
4.3 Взаимосвязь между УРОВНЕМ АВТОНОМНОСТИ и РИСКОМ
При реализации ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА в соответствии с ГОСТ ISO 14791 необходимо учитывать УРОВЕНЬ АВТОНОМНОСТИ. УРОВЕНЬ АВТОНОМНОСТИ не имеет прямой корреляции с уровнем РИСКА, но он может повлиять на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА. С одной стороны, МЭИ или МЭС может выполнить АВТОНОМНУЮ ЗАДАЧУ качественнее, чем ОПЕРАТОР (например, более безопасно, быстрее, точнее). С другой стороны, непредусмотренные последствия повышения УРОВНЯ АВТОНОМНОСТИ могут повысить РИСК из-за потери ОПЕРАТОРОМ понимания ситуации. Например, если ОПЕРАТОРУ необходимо взять на себя управление МЭИ или МЭС при сбое или нарушении нормального функционирования и если при этом ОПЕРАТОР дезориентирован в сложившейся ситуации, то ОПЕРАТОР может оказаться неспособным адекватно контролировать ситуацию. Двумя причинами ОПАСНОСТИ, связанной с УРОВНЕМ АВТОНОМНОСТИ, являются «разделенная ответственность» между ОПЕРАТОРОМ и МЭИ или МЭС и «неправильное выполнение функций», осуществляемое МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ. В приложении В приведено подробное описание воздействия, которое УРОВЕНЬ АВТОНОМНОСТИ может оказать на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА, на основе анализа нескольких примеров МЭИ или МЭС.
5 СТАНДАРТЫ НА ПРОЦЕССЫ, поддерживающие УРОВЕНЬ АВТОНОМНОСТИ
5.1 Общие положения
Введение УРОВНЕЙ АВТОНОМНОСТИ позволит изменить РИСК или повысить клинические возможности МЭИ или МЭС. Для МЭИ или МЭС с более высоким УРОВНЕМ АВТОНОМНОСТИ целостность и рабочие характеристики ПЭМС становятся более важными для обеспечения БЕЗОПАСНОСТИ, в зависимости от возможного ВРЕДА, который может быть причинен во время выполнения КЛИНИЧЕСКОЙ ФУНКЦИИ.
Для УРОВНЯ АВТОНОМНОСТИ наиболее значимы следующие СТАНДАРТЫ НА ПРОЦЕССЫ:
1) ГОСТ ISO 14791;
2) ГОСТ Р МЭК 62366-1;
3) ГОСТ Р МЭК 62304;
4) ГОСТ Р МЭК 80001-1,
а их значение пояснено в 5.3—5.6. Роль ОПЕРАТОРА будет меняться в зависимости от его ЗАДАЧ и взаимодействия с МЭИ или МЭС. Поддержание понимания ситуации ОПЕРАТОРОМ становится более значимым при проектировании МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ. ОПЕРАТОР должен:
- осознавать возможные ошибки, предупреждения об опасности и сбои МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ;
- понимать, когда требуется его вмешательство;
- иметь возможность вмешиваться в действия МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ;
- при вмешательстве быть способным ВЫБРАТЬ и выполнить надлежащее корректирующее действие или остановить работу.
Все это требует от ОПЕРАТОРА адекватного понимания ситуации во время работы МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ и знания того, что делать, когда ситуация отклоняется от нормы. ИЗГОТОВИТЕЛЬ должен учитывать изменение ЗАДАЧ ОПЕРАТОРА в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, связанного с УРОВНЕМ АВТОНОМНОСТИ.
В приложении В приведены примеры МЭИ, иллюстрирующие взаимосвязь между УРОВНЕМ АВТОНОМНОСТИ, ОСНОВНОЙ БЕЗОПАСНОСТЬЮ и ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ.
В ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА критичность УРОВНЯ АВТОНОМНОСТИ зависит от его влияния на ТЯЖЕСТЬ ВРЕДА, а не от классификации УРОВНЯ АВТОНОМНОСТИ.
ИЗГОТОВИТЕЛЬ должен пересмотреть и проанализировать все ПРОЦЕССЫ, связанные с РИСКОМ и ОПАСНОСТЬЮ, при изменении УРОВНЯ АВТОНОМНОСТИ МЭИ или МЭС, что может вызвать необходимость изменения конструкции.
5.2 ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
5.2.1 Определение ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ
ИЗГОТОВИТЕЛИ должны быть предельно внимательны при определении ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ своих МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ. ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ является наиболее важной характеристикой, которая должна быть точно определена ИЗГОТОВИТЕЛЕМ. Одной из важных составляющих ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ является определение типа ПАЦИЕНТОВ, для которых предназначено МЭИ или МЭС. Для существующих и разрабатываемых МЭИ или МЭС, обладающих высоким УРОВНЕМ АВТОНОМНОСТИ, в их ПРЕДУСМОТРЕННОМ ПРИМЕНЕНИИ должен быть четко определен тип ПАЦИЕНТОВ, для которых предназначены данные МЭИ или МЭС.
5.2.2 ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ и характеристики, относящиеся к БЕЗОПАСНОСТИ
5.2.2.1 ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ и ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
ИЗГОТОВИТЕЛЬ в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА (см. ГОСТ ISO 14971—2011, 4.2) должен указать ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ, и обратить внимание на характеристики, связанные с БЕЗОПАСНОСТЬЮ.
5.2.2.2 Характеристики ПАЦИЕНТА, связанные с БЕЗОПАСНОСТЬЮ
При проектировании всех типов МЭИ или МЭС, обладающих или не обладающих высоким УРОВНЕМ АВТОНОМНОСТИ, следует учитывать дополнительные характеристики, касающиеся ПАЦИЕНТОВ, включая следующие:
- типы ПАЦИЕНТОВ;
- способности ПАЦИЕНТОВ к восприятию;
- физические способности ПАЦИЕНТОВ;
- когнитивные способности ПАЦИЕНТОВ;
- наличие аллергий у ПАЦИЕНТОВ.
Пояснение этих характеристик приведено в приложении С.
5.2.2.3 Физиологические сигналы ПАЦИЕНТОВ
Предполагается, что применение ФИЗИОЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ С ОБРАТНОЙ СВЯЗЬЮ в МЭИ И МЭС повысит БЕЗОПАСНОСТЬ ПАЦИЕНТОВ. При разработке новых МЭИ или МЭС могут возникнуть ОПАСНОСТИ, которые прямо не устраняются применением действующих стандартов.
МЭИ или МЭС, обладающие высоким УРОВНЕМ АВТОНОМНОСТИ, могут воспринимать физиологические параметры ПАЦИЕНТОВ, и сигналы физиологической обратной связи будут обрабатываться МЭИ или МЭС, а ИЗГОТОВИТЕЛЬ должен это учитывать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
Примечание — Требования к ФИЗИОЛОГИЧЕСКИМ КОНТРОЛЛЕРАМ С ОБРАТНОЙ СВЯЗЬЮ установлены в [4].
Существуют следующие физиологические сигналы (сенсорные входы от ПАЦИЕНТА):
а) температура (см. например, [5] или [6]);
Ь) мышечный рефлекс (см., ГОСТ Р МЭК 60601-2-10);
с) кровяное давление (неинвазивное: см., например, [7]; инвазивное: см. ГОСТ Р МЭК 60601-2-34);
d) насыщение крови кислородом (например, SPO2 — см. [8]);
е) чрескожное парциальное давление (значение СО2 — см. ГОСТ Р МЭК 60601-2-23);
f) вдох/выдох (частота и объем — см. ГОСТ Р ИСО 80601-2-55 или ГОСТ Р ИСО 80601-2-12);
д) электрофизиологические сигналы (электрокардиограмма, электроэнцефалограмма, электромиограмма — см. ГОСТ Р МЭК 60601-2-25, ГОСТ Р МЭК 60601-2-27, ГОСТ Р МЭК 60601-2-47, ГОСТ Р МЭК 60601-2-49, а также [W], [11]);
h) сенсориальные характеристики (чувствительность к боли, теплу, холоду, давлению);
i) гемодинамические сигналы (см. ГОСТ Р МЭК 60601-2-16);
j) слух (см. ГОСТ Р МЭК 60601-2-66);
к) реакция глаз (дилатация);
I) звуки, издаваемые ПАЦИЕНТОМ (вербальные и невербальные).
Примечание — Указанные выше стандарты содержат требования к МЭИ для определения соответствующих физиологических сигналов.
5.2.2.4 Химико-физиологические сигналы, поступающие от ПАЦИЕНТОВ в результате лабораторных анализов:
а) содержание сахара и электролитов в крови;
Ь) анализ мочи (косвенно — требуются результаты лабораторного анализа);
с) анализ слюны (косвенно — требуются результаты лабораторного анализа);
d) другие лабораторные/фармацевтические анализы (ДНК, патологии, ткани и т. д.).
5.3 УПРАВЛЕНИЕ РИСКОМ
5.3.1 Общие положения
Варианты УПРАВЛЕНИЯ РИСКОМ не обязательно являются взаимно исключающими или соответствующими для любых обстоятельств. К вариантам УПРАВЛЕНИЯ РИСКОМ, связанным с УРОВНЕМ АВТОНОМНОСТИ, могут относиться:
а) избегание ОПАСНОСТИ с помощью решения не начинать или не продолжать действие на данном УРОВНЕ АВТОНОМНОСТИ, которое приведет к повышению РИСКА;
Ь) принятие повышенного РИСКА при более высоком УРОВНЕ АВТОНОМНОСТИ, который обеспечивает превалирование клинических преимуществ по отношению к данному РИСКУ;
с) устранение источника ОПАСНОСТИ в МЭИ или МЭС, связанного с данным УРОВНЕМ АВТОНОМНОСТИ;
d) изменение вероятности нанесения ВРЕДА, связанного с данным УРОВНЕМ АВТОНОМНОСТИ;
е) изменение ТЯЖЕСТИ ВРЕДА, связанного сданным УРОВНЕМ АВТОНОМНОСТИ;
f) распределение РИСКА, связанного с данным УРОВНЕМ АВТОНОМНОСТИ, между несколькими подсистемами МЭИ или МЭС;
д) сохранение РИСКА, связанного сданным УРОВНЕМ АВТОНОМНОСТИ, за счет принятия осознанного решения на основе анализа соотношения между РИСКОМ и пользой.
ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА должен быть выполнен для идентификации любых установленных или прогнозируемых ОПАСНОСТЕЙ, которые может вызывать МЭИ или МЭС. В ПРОЦЕССЕ идентификации ОПАСНОСТЕЙ пристальное внимание следует уделять специфичным для данного применения аспектам. Как минимум, конкретный анализ УРОВНЯ АВТОНОМНОСТИ при выполнении КЛИНИЧЕСКОЙ ФУНКЦИИ, как части ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ, или при тщательном изучении прогнозируемых ситуаций НЕПРАВИЛЬНОГО ИСПОЛЬЗОВАНИЯ должен быть произведен для следующих случаев, но не ограничиваясь ими:
h) неопределенность АВТОНОМНЫХ решений, принимаемых МЭИ или МЭС, и возможные ОПАСНЫЕ СИТУАЦИИ, возникающие в результате принятия неправильных решений;
i) разные уровни знаний, опыта, характеристик и физического состояния ОПЕРАТОРОВ, ПАЦИЕНТОВ и других подвергшихся воздействию людей, как представлено в приложении С;
j) нормальные, но неожиданные действия МЭИ или МЭС из-за данного УРОВНЯ АВТОНОМНОСТИ;
к) неожиданные или непредусмотренные действия в окружающей среде (например, кто-то движется в рабочей зоне МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ);
I) неожиданный тип поверхности перемещения и внешних условий в случае МОБИЛЬНЫХ МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ;
т) неопределенность действий МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ, по отношению к ПАЦИЕНТУ, ОПЕРАТОРУ, другим задействованным людям, животным, имуществу и окружающей среде;
п) соответствие анатомии человека и ее изменчивости, как показано в приложении С;
о) сбой или отключение питания и возобновление подачи питания (см. ГОСТ Р МЭК 60601-1— 2022, 11.8) на МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ;
р) ОПАСНОСТИ, возникающие из-за стресса, неудобной позы, использования или критических ситуаций ПАЦИЕНТА. ОПАСНОСТИ могут возникать как из-за физических, так и из-за психических аспектов использования либо применения МЭИ или МЭС (см. ГОСТ Р МЭК 62366-1—2021, 3.29);
q) ОПАСНОСТИ, возникающие из-за потери ОПЕРАТОРОМ понимания ситуации, касающейся МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ.
5.3.2 Иерархия УПРАВЛЕНИЯ РИСКОМ
5.3.2.1 Варианты УПРАВЛЕНИЯ РИСКОМ
Варианты УПРАВЛЕНИЯ РИСКОМ, представленные в следующих подпунктах, расположены в порядке убывания их общепризнанной эффективности в снижении РИСКА. ИЗГОТОВИТЕЛЬ должен учесть этот и другие факторы, прежде чем принимать решение о том, какую комбинацию мер по реализации функций НАБЛЮДАТЬ, РАЗРАБАТЫВАТЬ, ВЫБИРАТЬ и ВЫПОЛНЯТЬ он будет использовать.
Результат УПРАВЛЕНИЯ РИСКОМ может вызвать дополнительные ОПАСНОСТИ. Существенным РИСКОМ может стать отсутствие или неэффективность мер по УПРАВЛЕНИЮ РИСКОМ. ЗАДАЧА КОНТРОЛЯ должна стать составной частью плана по УПРАВЛЕНИЮ РИСКОМ для того, чтобы быть уверенными в том, что меры остаются эффективными.
Примечание —Документирование и регистрация («черный ящик») ЗАДАЧ МЭИ или МЭС могут помочь провести оценку ситуации после инцидента, а также усовершенствовать МЕНЕДЖМЕНТ РИСКА на протяжении ЖИЗНЕННОГО ЦИКЛА МЭИ или МЭС.
5.3.2.2 Конструкция со встроенной безопасностью
При введении УРОВНЯ АВТОНОМНОСТИ должны быть применены, по мере необходимости, следующие меры:
а) устранение конкретной ОПАСНОСТИ, например ограничение рабочих сценариев, чтобы избежать ОПАСНЫХ СИТУАЦИЙ, связанных с УРОВНЕМ АВТОНОМНОСТИ и приводящих к неправильному выполнению ЗАДАЧ;
Ь) снижение вероятности нанесения ВРЕДА, например использование уникальных идентификаторов для ПАЦИЕНТА, ОПЕРАТОРА, третьих лиц, животных и объектов, связанных с БЕЗОПАСНОСТЬЮ (в частности, имуществу или факторам окружающей среды), маршрутов передвижения (см. [11]);
с) уменьшение ТЯЖЕСТИ ВРЕДА, например снижение скорости МЭИ;
d) регулирование производительности или надежности действий при выполнении ЗАДАЧИ КОНТРОЛЯ МЭИ или МЭС (т. е. УРОВЕНЬ АВТОНОМНОСТИ должен быть повышен или снижен до того уровня, при котором отсутствует неприемлемый РИСК);
е) разработка алгоритмов для ЗАДАЧИ РАЗРАБАТЫВАТЬ ВАРИАНТЫ, обеспечивающих вычисление вероятности некоторого приемлемого решения и ее отслеживание на основе послепродажных данных. Если выполнение ЗАДАЧИ РАЗРАБАТЫВАТЬ ВАРИАНТЫ дает результаты с высокой неопределенностью, то следует провести их повторную оценку с использованием альтернативных методов или дополнительной информации. Если после повторной оценки неопределенность результата остается неприемлемой, то данный ВАРИАНТ должен быть отклонен;
f) обеспечение выполнения ЗАДАЧИ ВЫБИРАТЬ ВАРИАНТ на основе надлежащих критериев достижения оптимального баланса между РИСКОМ и пользой при реализации КЛИНИЧЕСКИХ ФУНКЦИЙ.
5.3.2.3 Защитные меры
При введении УРОВНЕЙ АВТОНОМНОСТИ необходимо принимать во внимание следующие меры:
а) применение визуальных и звуковых сигналов тревоги для предупреждения ОПЕРАТОРА или ПАЦИЕНТА об ОПАСНОЙ СИТУАЦИИ, включая тот случай, когда невозможно обеспечить поддержание ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК;
Ь) обеспечение поддержания намеченной КЛИНИЧЕСКОЙ ФУНКЦИИ с заданными параметрами при исполнении ЗАДАЧИ ВЫПОЛНЯТЬ;
с) добавление новых возможностей, таких как системы обнаружения столкновений, изменения скорости или других параметров, контроля устойчивости и т. д., на основе результата общего ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА.
5.3.2.4 Информация по БЕЗОПАСНОСТИ
Для повышения БЕЗОПАСНОСТИ при введении УРОВНЕЙ АВТОНОМНОСТИ может быть использован следующий неполный перечень мер:
а) размещение надлежащих предупреждений относительно последовательности задач НАБЛЮДАТЬ — РАЗРАБАТЫВАТЬ — ВЫБИРАТЬ — ВЫПОЛНЯТЬ (НРВВ);
Ь) ограничение использования последовательности задач НРВВ в соответствии с ПРОЦЕССОМ МЕНЕДЖМЕНТА РИСКА и предоставление ОПЕРАТОРУ четкой информации об ОСТАТОЧНОМ РИСКЕ;
с) обеспечение уведомлений о неправильном применении, возможных ОПАСНОСТЯХ или другой информации, которая может помочь снизить РИСК, связанный с УРОВНЕМ АВТОНОМНОСТИ, в тех случаях, когда своевременное реагирование не требуется;
d) указание на обязательность использования надлежащих средств индивидуальной защиты, таких как перчатки и защитные очки;
е) обеспечение подготовки ОПЕРАТОРОВ для повышения их эффективности или способности обнаруживать ошибки, связанные с УРОВНЕМ АВТОНОМНОСТИ, и для понимания ОПЕРАТОРОМ ситуации в изменении его роли от непосредственного участия к наблюдению и контролю из-за повышения УРОВНЯ АВТОНОМНОСТИ МЭИ или МЭС;
f) определение необходимого технического обслуживания и интервалов его проведения в течение всего ОЖИДАЕМОГО СРОКА СЛУЖБЫ и способов правильной утилизации МЭИ или МЭС.
5.4 Вопросы ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ МЭИ
или МЭС, обладающих высоким УРОВНЕМ АВТОНОМНОСТИ
5.4.1 Общие положения
Для МЭИ или МЭС направленность ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ обычно изменяется при повышении или понижении УРОВНЯ АВТОНОМНОСТИ. Для более высокого УРОВНЯ АВТОНОМНОСТИ ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ должно быть направлено в основном на контролирующую роль ОПЕРАТОРА, тогда как при более низком УРОВНЕ АВТОНОМНОСТИ — на непосредственное участие ОПЕРАТОРА в выполнении КЛИНИЧЕСКОЙ ФУНКЦИИ. Для промежуточных значений УРОВНЯ АВТОНОМНОСТИ ПРОЦЕСС ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ следует использовать для идентификации ОПАСНОСТЕЙ и проверки эффективности элементов управления МЕНЕДЖМЕНТА РИСКА, связанных с разделением ответственности.
ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ включает в себя различные аспекты, такие как обеспечение адекватного понимания ситуации ОПЕРАТОРОМ, учет времени реакции ОПЕРАТОРА, сенсорного ввода данных и отклика на них, а также способность ОПЕРАТОРА выявлять неправильную работу или ошибки МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ. ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ не обязательно требует взаимодействия между ПАЦИЕНТОМ и МЭИ или МЭС без или с предельно ограниченным привлечением ОПЕРАТОРА. Используя более высокий УРОВЕНЬ АВТОНОМНОСТИ, ИЗГОТОВИТЕЛЬ должен учитывать данное изменение роли ОПЕРАТОРА.
5.4.2 Понимание ситуации ОПЕРАТОРОМ
ОПЕРАТОР, работающий с МЭИ, имеющим высокий УРОВЕНЬ АВТОНОМНОСТИ, имеет тенденцию к потере понимания ситуации. Если МЭИ или МЭС с некоторым УРОВНЕМ АВТОНОМНОСТИ не может надлежащим образом отреагировать на неординарную ситуацию, то ОПЕРАТОР должен взять на себя управление одной или несколькими ЗАДАЧАМИ МЭИ или МЭС для того, чтобы не допустить нанесения ВРЕДА ПАЦИЕНТУ, ОПЕРАТОРУ или другим людям (например, непрофессионалам).
Когда для управления РИСКОМ требуется действие ОПЕРАТОРА, то крайне важно, чтобы ОПЕРАТОР:
- понимал ситуацию;
- мог определить стратегию или реакцию на неординарную ситуацию за требуемое время;
- был способен выполнить требуемую ЗАДАЧУ или остановить выполнение ЗАДАЧИ, чтобы предотвратить неприемлемый РИСК.
Понимание ситуации ОПЕРАТОРОМ может быть критическим для БЕЗОПАСНОСТИ, которую следует рассмотреть в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА на стадии проектирования МЭИ или МЭС с некоторым УРОВНЕМ АВТОНОМНОСТИ и контролировать в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. ИЗГОТОВИТЕЛЬ должен рассмотреть воздействие потери понимания ситуации на все РИСКИ и на все меры по УПРАВЛЕНИЮ РИСКОМ. Если потеря понимания ситуации увеличивает РИСК, то необходимо исследовать вероятность потери понимания ситуации.
При проектировании МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ понимание ситуации ОПЕРАТОРОМ может быть повышено вовлечением ОПЕРАТОРА в реализацию задач «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ» один из них или «ВЫПОЛНЯТЬ» при осуществлении КЛИНИЧЕСКОЙ ФУНКЦИИ. В ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ должны быть рассмотрены данные ситуации.
5.4.3 Время реакции ОПЕРАТОРА
В данном пункте рассмотрено снижение РИСКА путем введения требований к МЭИ или МЭС, связанных с их УРОВНЕМ АВТОНОМНОСТИ, чтобы он был согласован с временем реакции ОПЕРАТО-
РА за счет корректировки их функциональной синхронности или определения того, как справляться с ОПАСНОСТЯМИ в случае несогласованности.
Одним из факторов РИСКА для МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ, является их способность реагировать независимо от вмешательства ОПЕРАТОРА и за время, которое может быть несовместимо с возможностями человека. Существуют два варианта: в первом из них временные характеристики системы позволяют ОПЕРАТОРУ прервать ПРОЦЕСС или перевести МЭИ или МЭС в безопасное состояние; во втором варианте МЭИ или МЭС работает быстрее, чем время реакции человека. ИЗГОТОВИТЕЛЬ должен рассмотреть оба варианта в ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
Примеры
1 МЭИ, обладающее УРОВНЕМ АВТОНОМНОСТИ с ограничением на быстродействие, позволяет ОПЕРАТОРУ прервать непредусмотренное действие, например с помощью устройств аварийной остановки (см. ГОСТ Р МЭК 60601-1—2022, 9.2.4).
2 МЭИ обладает УРОВНЕМ АВТОНОМНОСТИ, при котором возможность корректирования движения в зависимости от смещений органа во время лечения намного быстрее, чем время реакции ОПЕРАТОРА.
В ПРОЦЕССЕ ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ, а также в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА необходимо рассмотреть данные ситуации.
5 .4.4 Сенсорные входные сигналы и восприимчивость ОПЕРАТОРА
Помимо использования первичных сенсорных входных сигналов, таких как тактильные входные сигналы, ОПЕРАТОРЫ основывают свои действия на сенсорных входных сигналах, прошедших обработку, чтобы стать визуально и/или на слух воспринимаемыми человеком, в то время как источник этих входных сигналов может быть вне диапазона восприимчивости человека. Тем не менее в некоторых случаях может быть целесообразным использовать сенсорные входные сигналы ОПЕРАТОРА как обязательные входные сигналы в ПРОЦЕССЕ КОНТРОЛЯ МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ.
МЭИ или МЭС могут помочь в решении ЗАДАЧ «НАБЛЮДАТЬ» и «ВЫБИРАТЬ» из нескольких источников в тех случаях, когда необработанные входные сигналы от датчиков не могут быть восприняты ОПЕРАТОРОМ. В этом случае высокий УРОВЕНЬ АВТОНОМНОСТИ может быть необходим для автоматизации (в реальном времени) выбора и фильтрации данных, чтобы сделать сенсорные данные доступными в той форме, в которой они могут быть понятны человеку и позволят ему работать с ними.
5 .4.5 Способность ОПЕРАТОРА обнаруживать неправильные действия и ошибки МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ
МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ могут РАЗРАБАТЫВАТЬ ВАРИАНТЫ, доступные для ВЫБОРА ОПЕРАТОРОМ, или при наличии еще более высокого УРОВНЯ АВТОНОМНОСТИ МЭИ или МЭС могут как РАЗРАБАТЫВАТЬ, так и ВЫБИРАТЬ ВАРИАНТЫ. При этом роль ОПЕРАТОРА превращается в роль супервизора, а не участника действия.
ИЗГОТОВИТЕЛИ МЭИ или МЭС должны продумать роль ОПЕРАТОРА во время ПРОЦЕССА общего проектирования и разработки. Поводом для применения дополнительных мер должен стать результат ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА. Например, могут быть применены следующие меры:
- проектирование с целью поддержания понимания ситуации ОПЕРАТОРОМ;
- более подробные или исчерпывающие рекомендации в руководстве ОПЕРАТОРА по МЭИ или МЭС;
- четкие методы, обеспечивающие обнаружение ОПЕРАТОРОМ неправильных действий или ошибок МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ;
- дополнительная подготовка ОПЕРАТОРА для выполнения своей роли.
5.5 ПРОГРАММИРУЕМЫЕ ЭЛЕКТРИЧЕСКИЕ МЕДИЦИНСКИЕ СИСТЕМЫ и ЖИЗНЕННЫЙ
ЦИКЛ разработки программного обеспечения (ГОСТ Р МЭК 62304)
Для МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ работоспособность ПЭМС, вероятно, будет значимой для обеспечения БЕЗОПАСНОСТИ, но ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ останется существенной для обеспечения БЕЗОПАСНОСТИ вплоть до полностью АВТОНОМНЫХ МЭИ или МЭС, когда ОПЕРАТОР не будет участвовать в работе МЭИ или МЭС.
Программное обеспечение часто является неотъемлемой частью МЭИ или МЭС. Достижение ОСНОВНОЙ БЕЗОПАСНОСТИ и ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК МЭИ или МЭС, со-14
держащих программное обеспечение, требует знания того, для чего предназначено программное обеспечение, и демонстрации того, что данное программное обеспечение выполняет свои функции, не вызывая каких-либо неприемлемых РИСКОВ.
ОПАСНОСТИ, которые косвенно могут быть вызваны программным обеспечением (например, при предоставлении недостоверной информации, которая может привести к назначению ненадлежащего лечения), следует проанализировать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА при определении того, является ли программное обеспечение способствующим фактором.
МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ, вероятно, будут содержать более широкий функционал программного обеспечения, необходимого для выполнения ЗАДАЧ, как правило, выполняемых ОПЕРАТОРОМ, а также дополнительные средства обеспечения функциональной совместимости во всем программном обеспечении, что увеличивает объем и сложность программного обеспечения.
Решение об использовании программного обеспечения для управления РИСКОМ принимают в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА. ПРОЦЕССЫ ЖИЗНЕННОГО ЦИКЛА программного обеспечения являются существенной частью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА. Наличие дополнительного или другого программного обеспечения потребует пересмотра ПРОЦЕССОВ МЕНЕДЖМЕНТА РИСКА (см. ГОСТ ISO 14971 и ГОСТ Р МЭК 62304).
Для МЭИ или МЭС, реализующих функцию ВЫПОЛНЯТЬ данную КЛИНИЧЕСКУЮ ФУНКЦИЮ или ЗАДАЧУ, потребуется программное обеспечение для информирования ОПЕРАТОРА о любой неординарной ситуации или неправильном действии. ИЗГОТОВИТЕЛЬ должен будет проанализировать программное обеспечение на соответствие требованиям ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ. ОПЕРАТОР должен понимать ЗАДАЧИ или КЛИНИЧЕСКИЕ ФУНКЦИИ МЭИ или МЭС и ограничения на МЭИ или МЭС при каком-либо клиническом осложнении. ОПЕРАТОР должен знать, в каком случае потребуется его вмешательство, особенно в том случае, если МЭИ или МЭС не может ВЫПОЛНИТЬ КЛИНИЧЕСКУЮ ФУНКЦИЮ должным образом.
5.6 Применение МЕНЕДЖМЕНТА РИСКА в информационно-вычислительных сетях
с медицинскими приборамиДля МЭИ или МЭС с высоким УРОВНЕМ АВТОНОМНОСТИ также может потребоваться взаимодействовать с другими МЭИ или с другим немедицинским оборудованием. ИЗГОТОВИТЕЛЬ должен предусмотреть создание новой МЭС в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА.
На рисунке 1 показан пример простой базовой модели, иллюстрирующей, как МЭИ или МЭС могут взаимодействовать между собой.
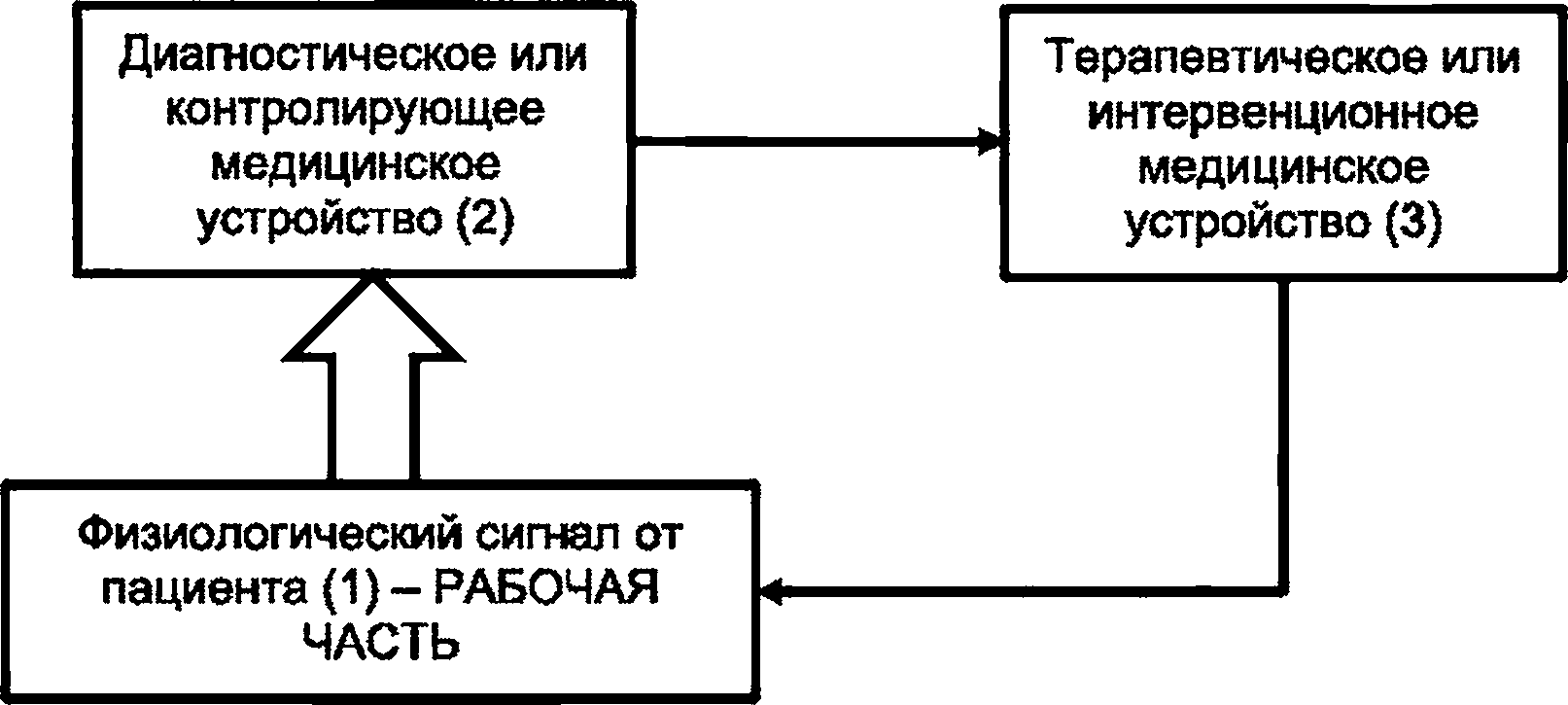
Примечание — Связь между (1) и (2) типична и обычно существует, тогда как связь между (2) и (3) обычно отсутствует и ее роль выполняет ОПЕРАТОР (медицинский персонал). Связь от (3) к (1) является результатом медицинской терапевтической/интервенционной помощи, предоставляемой ПАЦИЕНТУ. Медицинские устройства (1)—(3) могут быть компонентом МЭИ, подсистемой МЭИ, непосредственно МЭИ или МЭС. Медицинское устройство в данной модели эквивалентно МЭИ или МЭС.
Рисунок 1 — Базовая модель взаимодействия МЭИ в МЭС
[порядок рассмотрения от (1) к (3)]
МЭИ и МЭС являются существенной составляющей современной медицины. В МЭИ могут быть использованы открытые сетевые протоколы связи для передачи входных и выходных данных. Однако в отличие от оборудования современных компьютеров и бытовой электроники, имеющего возможность взаимодействовать по принципу plug-and-play («подключи и пользуйся»), большинство МЭИ не предназначены для такого взаимодействия. Обычно в МЭИ используют частные патентованные протоколы для интеграции в собственную систему. Данные подходы не обеспечивают адекватную интеграцию возможностей, необходимых для безопасной интеграции МЭИ, произведенных разными ИЗГОТОВИТЕЛЯМИ, и для обмена данными между разными МЭИ [см. связь между (2) и (3) на рисунке 1]. Если ИЗГОТОВИТЕЛЬ МЭИ хочет обеспечить сопрягаемость своих МЭИ с другими МЭИ, то он должен рассмотреть использование более высокого УРОВНЯ АВТОНОМНОСТИ, а ГОСТ ISO 14971 для этого требует соответствующего пересмотра документов МЕНЕДЖМЕНТА РИСКА и ПРОЕКТИРОВАНИЯ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ.
Рассмотрение соответствующих стандартов (см. [12]) может послужить дополнительным руководством для ИЗГОТОВИТЕЛЕЙ.
В настоящее время большинство МЭИ не имеют физиологической обратной связи, но предоставляют диагностическую или клиническую терапевтическую информацию, взаимодействуя с ОПЕРАТОРОМ (медицинским персоналом), а многие МЭИ или МЭС базируются на использовании программного обеспечения и зависят от взаимодействия с ОПЕРАТОРОМ.
МЭИ или МЭС с более высоким УРОВНЕМ АВТОНОМНОСТИ могут предоставить возможность НАБЛЮДАТЬ КЛИНИЧЕСКИЕ ФУНКЦИИ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, обеспечивают больше клинической информации для принятия медицинских решений, снижают объем взаимодействия с ОПЕРАТОРОМ и способствуют уменьшению числа ошибок ОПЕРАТОРА.
6 ОСНОВНАЯ БЕЗОПАСНОСТЬ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, связанные с УРОВНЕМ АВТОНОМНОСТИ
6.1 Общие положения
Повышение УРОВНЯ АВТОНОМНОСТИ может привести к передаче ответственности от ОПЕРАТОРА к МЭИ или МЭС, что может повысить значение УПРАВЛЕНИЯ РИСКАМИ, связанными с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ и ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ МЭИ или МЭС.
Введение УРОВНЯ АВТОНОМНОСТИ может привести к изменению следующих характеристик:
- КЛИНИЧЕСКАЯ ФУНКЦИЯ или иначе ПРЕДУСМОТРЕННОЕ ПРИМЕНЕНИЕ;
- характеристики, связанные с БЕЗОПАСНОСТЬЮ;
- ОПАСНЫЕ СИТУАЦИИ, которые необходимо устранить с помощью УПРАВЛЕНИЯ РИСКАМИ.
Значения функциональных характеристик, связанных с КЛИНИЧЕСКОЙ ФУНКЦИЕЙ, могут повысить ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, хотя УПРАВЛЕНИЕ РИСКАМИ связано как с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ, так и с ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ.
6.2 ОСНОВНАЯ БЕЗОПАСНОСТЬ, связанная с УРОВНЕМ АВТОНОМНОСТИ
ОСНОВНАЯ БЕЗОПАСНОСТЬ связана с использованием технических решений (например, компонентов, программного обеспечения, материалов и энергии), примененных в конструкции МЭИ или МЭС. Программные алгоритмы, реализованные в МЭИ или МЭС, и связанное с ними УПРАВЛЕНИЕ РИСКАМИ должны поддерживать допустимые уровни РИСКА (например, по поражению электрическим током, термическим ожогам, возгоранию, повышенной радиации). Они связаны с ВРЕДОМ, наносимым МЭИ или МЭС при действиях не по предназначению.
Если УРОВЕНЬ АВТОНОМНОСТИ повышает технические требования к ПРЕДНАЗНАЧЕННОМУ ИСПОЛЬЗОВАНИЮ, не связанному с КЛИНИЧЕСКОЙ ФУНКЦИЕЙ, или может усилить значение УПРАВЛЕНИЯ РИСКАМИ, связанными с изменением ЗАДАЧ ОПЕРАТОРА (увеличение или уменьшение), относящимися к ПРЕДНАЗНАЧЕННОМУ ИСПОЛЬЗОВАНИЮ, которое не может быть связано с КЛИНИЧЕСКИМИ ФУНКЦИЯМИ, то УРОВЕНЬ АВТОНОМНОСТИ должен привести к повышению технических требований к ОСНОВНОЙ БЕЗОПАСНОСТИ.
Примеры
1 Система получения изображений методом ядерного магнитного резонанса обладает низким УРОВНЕМ АВТОНОМНОСТИ, который позволяет переместить ПАЦИЕНТА в магнитный портал для получения изображения с помощью старт-стопного устройства ОПЕРАТОРА, которое не требует постоянного воздействия со стороны ОПЕРАТОРА. Поскольку позиционирование ПАЦИЕНТА в портале непосредственно не связано с получением изображения, то при ОЦЕНКЕ РИСКА данный параметр может быть определен, как относящийся к ОСНОВНОЙ БЕЗОПАСНОСТИ (опасность раздавливания) и не относящийся к КЛИНИЧЕСКОЙ ФУНКЦИИ (формирование изображения). Вместо этого он может быть рассмотрен как дополнение к ПРЕДНАЗНАЧЕННОМУ ИСПОЛЬЗОВАНИЮ. Данный параметр и необходимость УПРАВЛЕНИЯ РИСКАМИ, идентифицированная в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, принимают во внимание особенности ОСНОВНОЙ БЕЗОПАСНОСТИ. Зона перемещения может быть причиной ОПАСНОЙ СИТУАЦИИ и вызвать нанесение ВРЕДА (травмы раздавливания, срезания или защемления) ПАЦИЕНТУ.
2 Механизированный робототехнический гибкий эндоскоп, предназначенный для инвазивных процедур, имеет признаки УРОВНЯ АВТОНОМНОСТИ, который позволяет извлекать эндоскоп из пищевода с помощью старт-стопного устройства ОПЕРАТОРА, которое реверсирует маршрут, пройденный во время введения, и не требует постоянного воздействия. Поскольку введение/извлечение эндоскопа непосредственно не связано с получением визуального изображения, то при ОЦЕНКЕ РИСКА данный параметр может быть определен, как не относящийся к КЛИНИЧЕСКОЙ ФУНКЦИИ. Вместо этого он может быть рассмотрен как дополнение к ПРЕДНАЗНАЧЕННОМУ ИСПОЛЬЗОВАНИЮ. Данный параметр и необходимость УПРАВЛЕНИЯ РИСКАМИ, идентифицированная в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, принимают во внимание особенности ОСНОВНОЙ БЕЗОПАСНОСТИ. В результате может быть нанесен ВРЕД, связанный с ОПАСНОЙ СИТУАЦИЕЙ в зоне перемещения, который может вызвать травмы у ПАЦИЕНТА в виде задиров или порезов.
6 .3 ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, связанные с УРОВНЕМ
АВТОНОМНОСТИ
ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ получают в ПРОЦЕССЕ ОЦЕНКИ РИСКА, связанного с выполнением КЛИНИЧЕСКИХ ФУНКЦИЙ с использованием некоторого УРОВНЯ АВТОНОМНОСТИ.
ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ связаны с КЛИНИЧЕСКОЙ ФУНКЦИЕЙ, а их потеря или деградация повлечет за собой неприемлемый РИСК. Непредусмотренный РИСК, вызванный МЭИ или МЭС, обладающими некоторым УРОВНЕМ АВТОНОМНОСТИ, может возникнуть при попытке выполнения ими действий по своему предназначению. Если существует область частичного совпадения ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК и ОСНОВНОЙ БЕЗОПАСНОСТИ, то по определению эта область относится к ОСНОВНОЙ БЕЗОПАСНОСТИ. Если свойства УРОВНЯ АВТОНОМНОСТИ способствуют усовершенствованию технических характеристик КЛИНИЧЕСКИХ ФУНКЦИЙ или управления РИСКАМИ, связанными с расширением КЛИНИЧЕСКОЙ ФУНКЦИИ, то такой УРОВЕНЬ АВТОНОМНОСТИ улучшает ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, если это не приводит к частичному перекрытию с областью ОСНОВНОЙ БЕЗОПАСНОСТИ.
Примеры
1 В АВТОМАТИЧЕСКОЙ НАРУЖНОЙ ДЕФИБРИЛЛЯЦИИ (АНД) использовано свойство УРОВНЯ АВТОНОМНОСТИ, позволяющее синхронизировать подачу энергии дефибрилляции с пиком желудочкового комплекса сигнала электрокардиограммы (ЭКГ). Поскольку синхронизированная подача энергии дефибрилляции напрямую связана с дефибрилляционной терапией, то ОЦЕНКА РИСКА для введенного УРОВНЯ АВТОНОМНОСТИ позволит идентифицировать данное свойство, как связанное с КЛИНИЧЕСКОЙ ФУНКЦИЕЙ и не перекрывающееся с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ. Эта добавленная КЛИНИЧЕСКАЯ ФУНКЦИЯ может быть идентифицирована с помощью ОЦЕНКИ РИСКА как ОСНОВНАЯ ФУНКЦИОНАЛЬНАЯ ХАРАКТЕРИСТИКА.
2 В устройстве линейного ускорителя используется свойство УРОВНЯ АВТОНОМНОСТИ для ЛУЧЕВОЙ ТЕРАПИИ ПОД ВИЗУАЛЬНЫМ КОНТРОЛЕМ (ЛТВК), позволяющее синхронизировать проведение терапии с характером дыхания ПАЦИЕНТА. Поскольку синхронизированная подача ИЗЛУЧЕНИЯ напрямую связана с лучевой терапией, то в ПРОЦЕССЕ ОЦЕНКИ РИСКА данное свойство может быть определено, как относящееся к КЛИНИЧЕСКОЙ ФУНКЦИИ и не перекрывающееся с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ. Пределы функциональных характеристик данного свойства УРОВНЯ АВТОНОМНОСТИ могут быть определены как латентность функции включения/выключения луча. Данное свойство УРОВНЯ АВТОНОМНОСТИ и необходимое управление РИСКАМИ, выявленное в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, относятся к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ. ВРЕД, который может быть нанесен в результате, связан с ухудшением качества терапии или сопутствующим повреждением тканей вне целевой области терапии, что может привести к непредусмотренному или неприемлемому клиническому результату.
3 В устройстве линейного ускорителя использовано свойство УРОВНЯ АВТОНОМНОСТИ, позволяющее перемещать источник излучения по дуге вокруг целевой области и в процессе перемещения подстраивать многоэлементное устройство ограничения луча (УОЛ) для обеспечения соответствия луча площади поперечного сечения целевой области. С одной стороны, поскольку движение по дуге и движение по формированию луча напрямую связаны с планом лечения, то в ПРОЦЕССЕ ОЦЕНКИ РИСКА данное свойство может быть определено, как относящееся к КЛИНИЧЕСКОЙ ФУНКЦИИ и не перекрывающееся с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ. Данное свойство УРОВНЯ АВТОНОМНОСТИ и необходимого управления РИСКАМИ, выявленное в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, относятся к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ. ВРЕД, который может быть нанесен в результате, связан с ухудшением качества терапии или сопутствующим повреждением тканей вне целевой области терапии, что может привести к непредусмотренному или неприемлемому клиническому результату. С другой стороны, движение по дуге источника излучения можно рассматривать как перекрывающееся с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ, так как существует ОПАСНАЯ СИТУАЦИЯ, связанная со столкновением с ПАЦИЕНТОМ или другим оборудованием. ВРЕД, который может быть нанесен в результате, также включает ОПАСНУЮ СИТУАЦИЮ в зоне захватывания, которая может привести к травмам раздавливания, разрезания или защемления ПАЦИЕНТА. В данном альтернативном случае движение по формированию луча можно рассматривать как связанное с ОСНОВНЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ, а движение по дуге — с ОСНОВНОЙ БЕЗОПАСНОСТЬЮ. В любом случае, относится ли движение по дуге к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ или к ОСНОВНОЙ БЕЗОПАСНОСТИ, это не меняет значимости подтверждения эффективности управления РИСКАМИ.
Некоторые частные требования к ОСНОВНОЙ БЕЗОПАСНОСТИ и ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ включают таблицы, содержащие требования к распределенным ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ. Эти таблицы содержат минимальные требования к ОСНОВНЫМ ФУНКЦИОНАЛЬНЫМ ХАРАКТЕРИСТИКАМ, применимые к конкретным МЭИ и МЭС. ИЗГОТОВИТЕЛЬ с помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА может также определить дополнительные ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ, относящиеся к его конкретным МЭИ или МЭС.
Если ИЗГОТОВИТЕЛЬ МЭИ или МЭС заявляет об отсутствии у них ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК, то это должно быть подтверждено с помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА по ГОСТ ISO 14971, чтобы убедиться в том, что данные МЭИ или МЭС не имеют ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК.
Все ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ рассматриваются в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА, если происходит передача ОПАСНОСТИ от ОПЕРАТОРА к МЭИ или МЭС, обладающим некоторым УРОВНЕМ АВТОНОМНОСТИ. В таблице 1 представлены примеры ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК для МЭИ или МЭС, обладающих УРОВНЕМ АВТОНОМНОСТИ, приведенные в конкретных стандартах. ИЗГОТОВИТЕЛЬ несет ответственность за оценку с помощью ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА, происходят ли изменения в ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИКАХ в том случае, когда имеет место передача ОПАСНОСТИ от ОПЕРАТОРА к МЭИ или МЭС, обладающим УРОВНЕМ АВТОНОМНОСТИ.
Таблица 1— Примеры ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ
Потенциально применимые ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ
КОНТРОЛЬ физиологических сигналов ПАЦИЕНТА
Сила противодействия МЭИ (восприятие реального движения/применения)
Точность/погрешность движения/измерения МЭИ
Погрешность при проведении клинического вмешательства МЭИ (терапевтическое, диагностическое, КОНТРОЛЬ)
Время выполнения требований к проведению клинического вмешательства МЭИ (терапевтическое, диагностическое, КОНТРОЛЬ)
Окончание таблицы 1
Потенциально применимые ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ
Чувствительность МЭИ
Стабильность параметров МЭИ
Обнаружение неправильной настройки до выполнения КЛИНИЧЕСКОЙ ФУНКЦИИ (например, отсоединение РАБОЧЕЙ ЧАСТИ от ПАЦИЕНТА, неправильная РАБОЧАЯ ЧАСТЬ для ПАЦИЕНТА, дефектная РАБОЧАЯ ЧАСТЬ для ПАЦИЕНТА)
Управление восстановлением МЭИ (рестарт, если работа была прервана)
Защита от выхода из-под контроля МЭИ (отсутствие возможности возврата к началу программы или к кому-либо месту в программе)
Преднамеренное действие ОПЕРАТОРА для изменения параметров (ручная коррекция — двойное подтверждение)
Выключение или отключение основного питания заданным безопасным способом
Способность удалить/отвести МЭИ без питания
Переходы МЭИ в безопасное состояние, определенные ИЗГОТОВИТЕЛЕМ, при возникновении непредвиденной клинической ситуации (режим нейтрализации неисправности)
Примечание — Эти примеры могут также относиться к ОСНОВНОЙ БЕЗОПАСНОСТИ. Идентификацию ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК определяет ИЗГОТОВИТЕЛЬ в зависимости от ПРЕДНАЗНАЧЕННОГО ИСПОЛЬЗОВАНИЯ МЭИ или МЭС.
Приложение А (справочное)
Примеры методов классификации УРОВНЕЙ АВТОНОМНОСТИ
А.1 Описательный метод
Описательный метод определяет 10 уровней АВТОНОМНОСТИ. Для того чтобы провести различие между этими уровнями АВТОНОМНОСТИ введены следующие четыре обобщенные функции для управления и функционирования:
- «НАБЛЮДАТЬ»;
- «РАЗРАБАТЫВАТЬ ВАРИАНТЫ»;
- «ВЫБИРАТЬ ВАРИАНТ»;
- «ВЫПОЛНЯТЬ выбранный ВАРИАНТ».
Десять уровней АВТОНОМНОСТИ описательного метода перечислены и описаны в таблице А.1. Каждая обобщенная функция может быть выполнена человеком (обозначено «Ч») или компьютером в МЭИ или МЭС (обозначено «К»), а буквы М, G, S, Е обозначают ЗАДАЧИ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ».
Во многих случаях невозможно приписать выполнение обобщенной функции исключительно человеку или компьютеру, тогда ответственность разделяется между человеком и компьютером (обозначено как «Ч/К» в таблице А.1). Например, при использовании телеуправляемого (ТО) робототехнического хирургического устройства хирург (ОПЕРАТОР) контролирует действия визуально, в то время как компьютер контролирует усилия и обеспечивает обратную связь для ОПЕРАТОРА.
Таблица А.1 — Описательная классификация УРОВНЕЙ АВТОНОМНОСТИ
Уровень | Описание | М | G | S | Е |
1 FM | Полностью ручной (FM): АВТОНОМНОСТИ не предусмотрено. ОПЕРАТОР выполняет все ЗАДАЧИ по КОНТРОЛЮ состояния системы, РАЗРАБОТКЕ ВАРИАНТОВ характеристик, ВЫБОРУ конкретного ВАРИАНТА (принятие решения) и ВЫПОЛНЕНИЮ принятого решения, т. е. его реализации | Ч | ч | ч | ч |
2 ТО | Телеуправление (ТО): МЭИ или МЭС помогает ОПЕРАТОРУ ВЫПОЛНЯТЬ выбранное действие, но под постоянным контролем ОПЕРАТОРА. ОПЕРАТОР решает все задачи по КОНТРОЛЮ состояния МЭИ или МЭС, РАЗРАБОТКЕ ВАРИАНТОВ, ВЫБОРУ конкретного ВАРИАНТА для ВЫПОЛНЕНИЯ и непосредственному его ВЫПОЛНЕНИЮ (телеуправление в копирующем режиме) | Ч/К | ч | ч | Ч/К |
3 РЕ | Запрограммированное выполнение (РЕ): ОПЕРАТОР осуществляет РАЗРАБОТКУ и ВЫБОР действий без какого-либо анализа или выбора со стороны МЭИ или МЭС | Ч/К | ч | ч | к |
4 SD | Совместное решение (SD): Как ОПЕРАТОР, так и МЭИ или МЭС РАЗРАБАТЫВАЮТ возможные ВАРИАНТЫ. ОПЕРАТОР оставляет за собой полный контроль за ВЫБОРОМ ЗАДАЧИ. ОПЕРАТОР и МЭИ или МЭС участвуют в ВЫПОЛНЕНИИ ЗАДАЧИ | Ч/К | Ч/К | ч | Ч/К |
5 DS | Поддержка решения (DS): МЭИ осуществляет РАЗРАБОТКУ ВАРИАНТОВ решения ЗАДАЧИ, исходя из которых ОПЕРАТОР может осуществить ВЫБОР либо РАЗРАБОТАТЬ альтернативные ВАРИАНТЫ. Когда ОПЕРАТОР осуществил ВЫБОР ВАРИАНТА, он передает его МЭИ или МЭС на ВЫПОЛНЕНИЕ | Ч/К | Ч/К | ч | к |
6 BD | Смешанное решение (BD): МЭИ или МЭС РАЗРАБАТЫВАЕТ ВАРИАНТЫ, осуществляет ВЫБОР и ВЫПОЛНЯЕТ его, если ОПЕРАТОР согласен. ОПЕРАТОР также может РАЗРАБАТЫВАТЬ И ВЫБИРАТЬ альтернативный ВАРИАНТ; тогда МЭИ осуществляет ВЫПОЛНЕНИЕ ЗАДАЧИ. BD представляет систему поддержки принятия решения высокого уровня, которая способна ВЫБИРАТЬ среди альтернатив, а также ВЫПОЛНЯТЬ выбранный ВАРИАНТ | Ч/К | Ч/К | Ч/К | к |
Окончание таблицы А1
Уровень | Описание | М | G | S | Е |
7 GD | Руководимое решение (GD): МЭИ или МЭС представляет ОПЕРАТОРУ множество действий. Роль ОПЕРАТОРА заключается в ВЫБОРЕ из этого множества; он не может РАЗРАБОТАТЬ какие-либо дополнительные ВАРИАНТЫ. МЭИ полностью ВЫПОЛНЯЕТ выбранный ВАРИАНТ | ч/к | К | ч | к |
8 AD | Автономное решение (AD): МЭИ или МЭС ВЫБИРАЕТ наилучший ВАРИАНТ и ВЫПОЛНЯЕТ его на основе РАЗРАБОТАННОЙ ЗАДАЧИ (данный список может быть дополнен альтернативами, предложенными ОПЕРАТОРОМ) | ч/к | Ч/К | к | к |
9 ОМ | Контроль оператора (ОМ): МЭИ или МЭС РАЗРАБАТЫВАЕТ ВАРИАНТЫ, ВЫБИРАЕТ ВАРИАНТ для реализации и ВЫПОЛНЯЕТ его. ОПЕРАТОР контролирует действия МЭИ или МЭС и при необходимости вмешивается. При таком вмешательстве человек осуществляет ВЫБОР другого ВАРИАНТА. Во время этого процесса могут существовать моменты, когда МЭИ или МЭС должна осуществить принятие решения | ч/к | к | к | к |
10 FA | Полная автономность (FA): МЭИ или МЭС осуществляет все четыре действия MGSE. ОПЕРАТОР не вмешивается, за исключением случая, когда необходимо произвести аварийный останов МЭИ или МЭС | к | к | к | к |
А.2 Бинарный метод
Бинарный метод определяет 16 уровней АВТОНОМНОСТИ. Четыре обобщенные функции (НАБЛЮДАТЬ, РАЗРАБАТЫВАТЬ ВАРИАНТЫ, ВЫБИРАТЬ ВАРИАНТ и ВЫПОЛНЯТЬ выбранный ВАРИАНТ) могут быть реализованы либо ОПЕРАТОРОМ, либо МЭИ или МЭС. Это дает 16 ВАРИАНТОВ, представленных в таблице А.2. Возрастание «индекса» в данной таблице соответствует увеличению УРОВНЯ АВТОНОМНОСТИ, однако при использовании данного метода может потребоваться настройка индексов применительно к конкретной ситуации.
Бинарный метод может быть использован, когда необходимо провести четкое разграничение распределения обобщенных функций между ОПЕРАТОРОМ и МЭИ или МЭС. В тех случаях, когда невозможно полностью назначить реализацию обобщенной функции ОПЕРАТОРУ либо МЭИ или МЭС, в таблице А.2 показано, на ком лежит основная доля ответственности.
Таблица А.2 — Бинарная классификация УРОВНЕЙ АВТОНОМНОСТИ
Уровень | ВЫПОЛНЯТЬ | ВЫБИРАТЬ | РАЗРАБАТЫВАТЬ | НАБЛЮДАТЬ |
0 | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР |
1 | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | МЭИ/МЭС |
2 | ОПЕРАТОР | ОПЕРАТОР | МЭИ/МЭС | ОПЕРАТОР |
3 | ОПЕРАТОР | ОПЕРАТОР | мэи/мэс | МЭИ/МЭС |
4 | ОПЕРАТОР | МЭИ/МЭС | ОПЕРАТОР | ОПЕРАТОР |
5 | ОПЕРАТОР | мэи/мэс | ОПЕРАТОР | МЭИ/МЭС |
6 | ОПЕРАТОР | мэи/мэс | МЭИ/МЭС | ОПЕРАТОР |
7 | ОПЕРАТОР | мэи/мэс | мэи/мэс | МЭИ/МЭС |
8 | МЭИ/МЭС | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР |
9 | мэи/мэс | ОПЕРАТОР | ОПЕРАТОР | МЭИ/МЭС |
10 | МЭИ/МЭС | ОПЕРАТОР | МЭИ/МЭС | ОПЕРАТОР |
11 | мэи/мэс | ОПЕРАТОР | мэи/мэс | МЭИ/МЭС |
12 | мэи/мэс | МЭИ/МЭС | ОПЕРАТОР | ОПЕРАТОР |
Окончание таблицы А. 2
Уровень | ВЫПОЛНЯТЬ | ВЫБИРАТЬ | РАЗРАБАТЫВАТЬ | НАБЛЮДАТЬ |
13 | мэи/мэс | мэи/мэс | ОПЕРАТОР | мэи/мэс |
14 | мэи/мэс | мэи/мэс | МЭИ/МЭС | ОПЕРАТОР |
15 | мэи/мэс | мэи/мэс | мэи/мэс | мэи/мэс |
Примечание — Функция в каждой ячейке может быть реализована совместно, но в каждом таком случае основным указан ОПЕРАТОР. | ||||
А.З Метод весовых коэффициентов
ЗАДАЧАМ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ ВАРИАНТ» и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» (М, G, S, Е) функции БЕЗОПАСНОСТИ МЭИ или МЭС может быть присвоен нормализованный весовой коэффициент (в диапазоне от 0 до 1) в зависимости от УРОВНЯ АВТОНОМНОСТИ, где 0 соответствует отсутствию АВТОНОМНОСТИ, а 1 — полной АВТОНОМНОСТИ. Промежуток между 0 и 1 представляет непрерывную функцию (линейную или нелинейную), с помощью которой могут быть представлены разные УРОВНИ АВТОНОМНОСТИ для конкретных прикладных задач.
УРОВЕНЬ АВТОНОМНОСТИ: данный метод должен обеспечить присвоение весового коэффициента, соответствующего УРОВНЮ АВТОНОМНОСТИ. Метод непрерывного отображения, представленный ниже, обеспечивает гибкость в принятии решения об УРОВНЕ АВТОНОМНОСТИ.
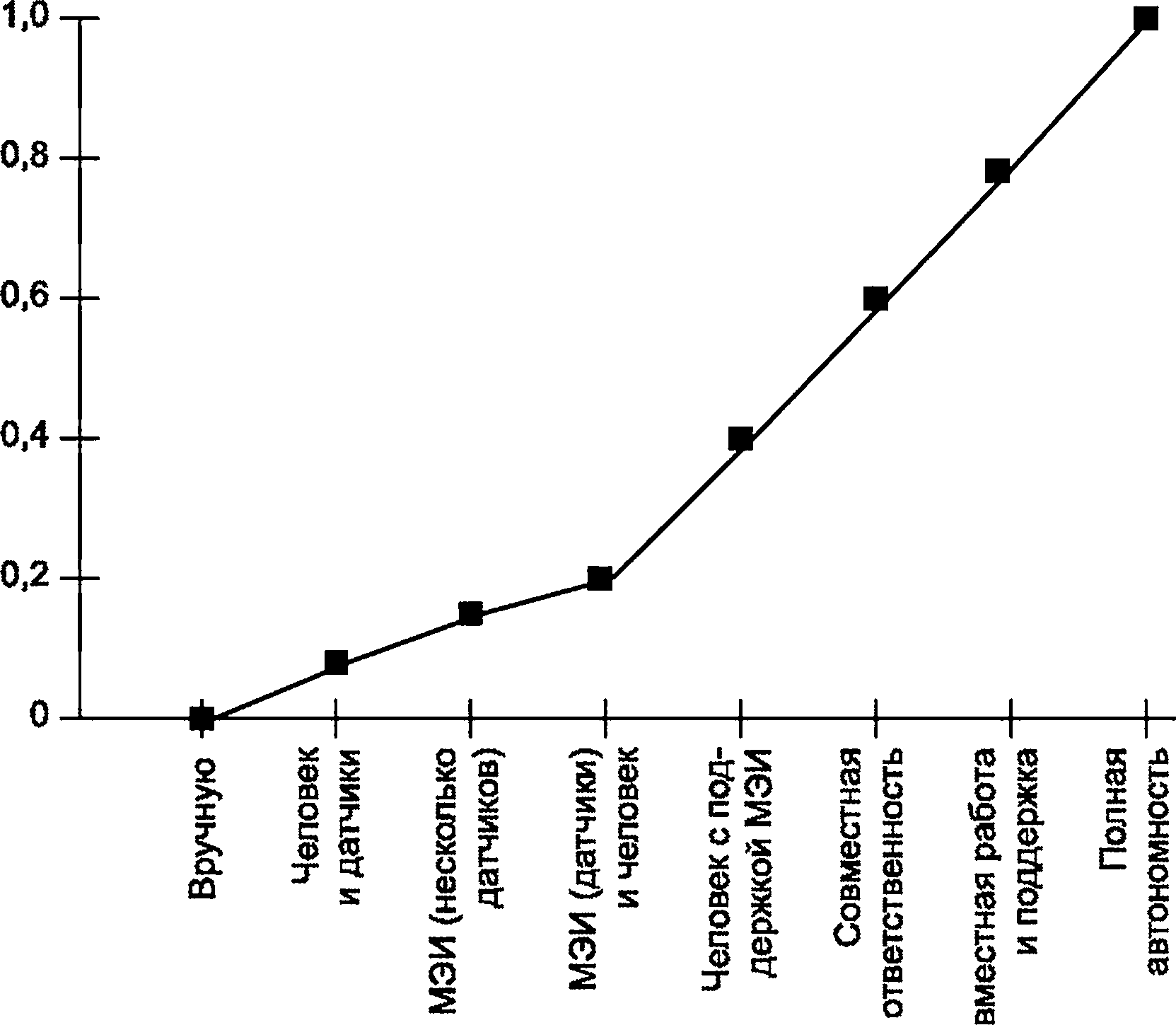
НАБЛЮДАТЬ: пример применения метода весовых коэффициентов к ЗАДАЧЕ «НАБЛЮДАТЬ» представлен на рисунке А. 1 (значения весовых коэффициентов на рисунке А. 1 приведены только в качестве примера).
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «НАБЛЮДАТЬ»
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «НАБЛЮДАТЬ»
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «НАБЛЮДАТЬ»
Человек использует собственные чувства и интерпретирует данные
0,1
Человек ВЫБИРАЕТ и использует датчик(и) и интерпретирует данные
Продолжение
0,15 | МЭИ или МЭС ВЫБИРАЕТ ограниченный набор датчиков, а человек интерпретирует данные |
0,2 | МЭИ или МЭС ВЫБИРАЕТ датчик(и), а человек интерпретирует полученные данные |
0,4 | МЭИ или МЭС ВЫБИРАЕТ датчик(и); человек интерпретирует данные, а МЭИ или МЭС предлагает альтернативы |
0,6 | МЭИ или МЭС ВЫБИРАЕТ датчик(и); МЭИ или МЭС интерпретирует подмножество данных (человек делает остальное) |
0,75 | МЭИ или МЭС ВЫБИРАЕТ датчик(и); МЭИ или МЭС интерпретирует подмножество данных и предлагает альтернативы для некоторых данных |
1 | МЭИ или МЭС ВЫБИРАЕТ датчик(и); МЭИ или МЭС интерпретирует данные |
Рисунок А. 1 — Применение метода весовых коэффициентов к ЗАДАЧЕ «НАБЛЮДАТЬ»
РАЗРАБАТЫВАТЬ ВАРИАНТЫ: пример применения метода весовых коэффициентов к ЗАДАЧЕ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ» представлен на рисунке А.2.
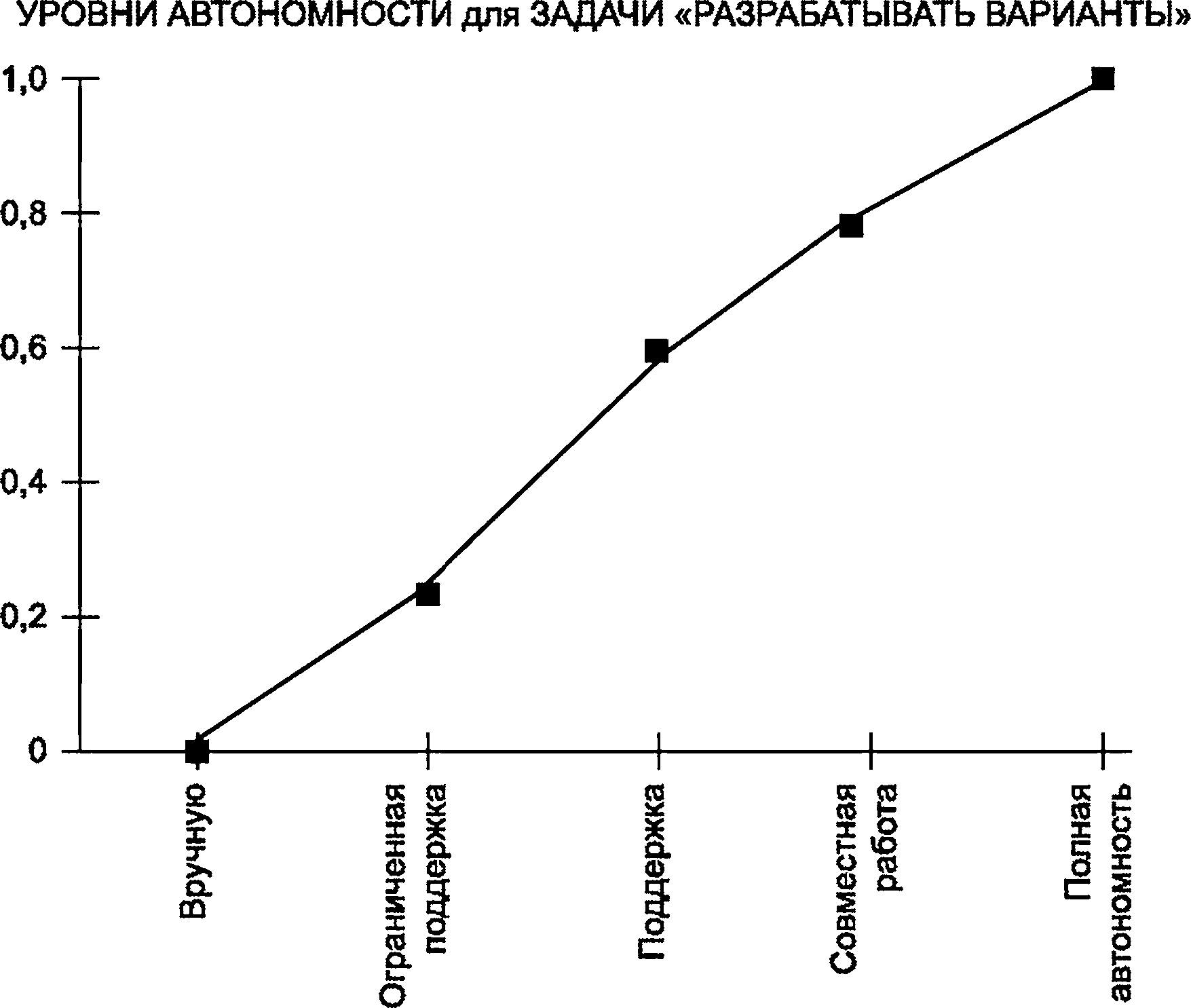
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ» | |
0 | МЭИ или МЭС не участвует в РАЗРАБОТКЕ ВАРИАНТОВ |
0,3 | МЭИ или МЭС помогает ОПЕРАТОРУ в РАЗРАБОТКЕ ВАРИАНТОВ для некоторых случаев |
0,6 | МЭИ или МЭС помогает ОПЕРАТОРУ в РАЗРАБОТКЕ ВАРИАНТОВ для всех случаев |
0,75 | МЭИ или МЭС РАЗРАБАТЫВАЕТ ВАРИАНТЫ для некоторых случаев |
1 | МЭИ или МЭС РАЗРАБАТЫВАЕТ ВАРИАНТЫ для всех случаев |
Рисунок А.2— Применение метода весовых коэффициентов к ЗАДАЧЕ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ»
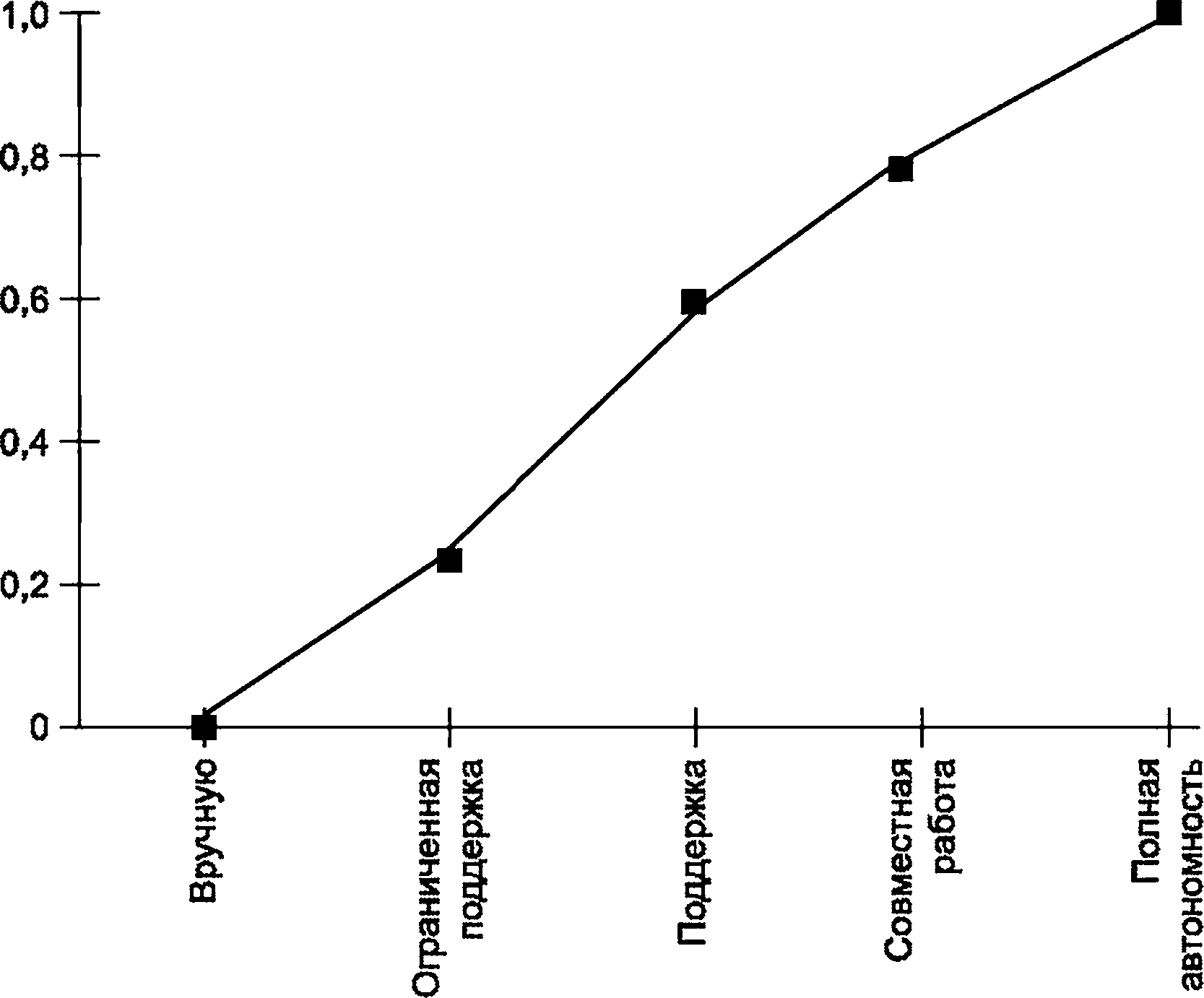
ВЫБИРАТЬ ВАРИАНТ: пример применения метода весовых коэффициентов к ЗАДАЧЕ «ВЫБИРАТЬ ВАРИАНТ» представлен на рисунке А.З.
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «ВЫБИРАТЬ ВАРИАНТ»
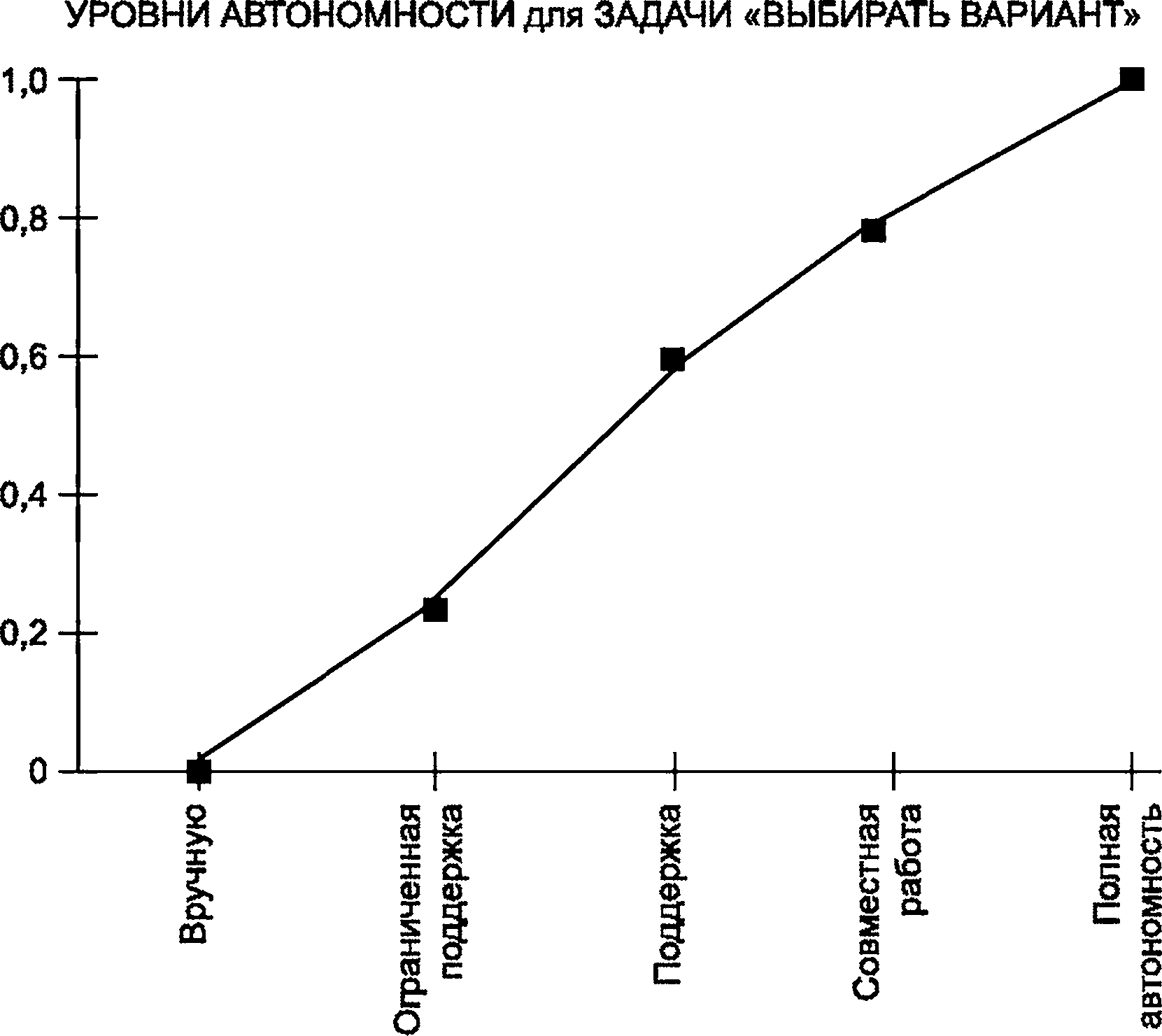
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «ВЫБИРАТЬ ВАРИАНТ» | |
0 | МЭИ или МЭС не участвует в ВЫБОРЕ ВАРИАНТА |
0,3 | МЭИ или МЭС помогает ОПЕРАТОРУ в ВЫБОРЕ ВАРИАНТА для некоторых случаев |
0,6 | МЭИ или МЭС помогает ОПЕРАТОРУ в ВЫБОРЕ ВАРИАНТА для всех случаев |
0,75 | МЭИ или МЭС ВЫБИРАЕТ ВАРИАНТ для некоторых случаев |
1 | МЭИ или МЭС ВЫБИРАЕТ ВАРИАНТ для всех случаев |
Рисунок А.З— Применение метода весовых коэффициентов к ЗАДАЧЕ «ВЫБИРАТЬ ВАРИАНТ»
ВЫПОЛНЯТЬ выбранный ВАРИАНТ: пример применения метода весовых коэффициентов к ЗАДАЧЕ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» представлен на рисунке А.4.
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ»
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ»
УРОВНИ АВТОНОМНОСТИ для ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» | |
0 | МЭИ или МЭС не участвует в ВЫПОЛНЕНИИ ВАРИАНТА |
0,3 | МЭИ или МЭС помогает ОПЕРАТОРУ в ВЫПОЛНЕНИИ ЗАДАЧИ для некоторых случаев |
0,6 | МЭИ или МЭС помогает ОПЕРАТОРУ в ВЫПОЛНЕНИИ ЗАДАЧИ для всех случаев |
0,75 | МЭИ или МЭС осуществляет ВЫПОЛНЕНИЕ ЗАДАЧИ для некоторых случаев |
1 | МЭИ или осуществляет ВЫПОЛНЕНИЕ ЗАДАЧИ для всех случаев |
Рисунок А.4 — Применение метода весовых коэффициентов к ЗАДАЧЕ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ»
Общий УРОВЕНЬ АВТОНОМНОСТИ: общий УРОВЕНЬ АВТОНОМНОСТИ МЭИ или МЭС для функции БЕЗОПАСНОСТЬ может быть получен комбинированием разных значений УРОВНЕЙ АВТОНОМНОСТИ для ЗАДАЧ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ ВАРИАНТ» и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» нижеприведенным образом.
Пусть w1t w2, w3 и w4 обозначают весовые коэффициенты УРОВНЕЙ АВТОНОМНОСТИ, связанные с ЗАДАЧАМИ «НАБЛЮДАТЬ» (М), «РАЗРАБАТЫВАТЬ ВАРИАНТЫ» (G), «ВЫБИРАТЬ ВАРИАНТ» (S) и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» (Е), соответственно, где
w1 + w2 + w3 + w4 = 1.
(A 7)
Тогда общий УРОВЕНЬ АВТОНОМНОСТИ для функции БЕЗОПАСНОСТЬ может быть определен следующим образом:
УРОВЕНЬ АВТОНОМНОСТИ =w^M+ w2G + w3S + w4E.
(A.2)
Решение данного уравнения даст в результате значение в диапазоне от 0 до 1, где 0 означает отсутствие АВТОНОМНОСТИ, а 1 — полную АВТОНОМНОСТЬ МЭИ или МЭС.
ИЗГОТОВИТЕЛЬ может подобрать значения коэффициентов, представленных на рисунках А. 1—А.4, таким образом, чтобы оценить влияние УРОВНЕЙ АВТОНОМНОСТИ на этапах М, G, S, Е. ИЗГОТОВИТЕЛЬ может изменять эти значения в зависимости от ПРЕДУСМОТРЕННОГО ПРИМЕНЕНИЯ. Затем ИЗГОТОВИТЕЛЬ определяет весовые коэффициенты vu1—w4 в зависимости от характеристик МЭИ или МЭС, учитывая относительную значимость этапов М, G, S, Е.
Пример — Рассмотрим МЭИ с весовыми коэффициентами УРОВНЕЙ АВТОНОМНОСТИ, определенными на основании того, что ЗАДАЧИ «НАБЛЮДАТЬ» и «РАЗРАБАТЫВАТЬ ВАРИАНТЫ» могут увеличить вероятность возникновения ОПАСНОЙ СИТУАЦИИ (которая может нанести ВРЕД), а выбранный ВАРИАНТ для ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ», весьма вероятно, нанесет ВРЕД для данного конкретного примера. При этом можно предположить, что весовые коэффициенты для М, G, S, Е будут иметь следующие значения:
w1 = 0,15; w2 - 0,15; w3 = 0,25; w4 = 0,45,
которые могут дать реалистичную оценку значимости функций М, G, S, Е для УРОВНЯ АВТОНОМНОСТИ.
Пусть весовые коэффициенты для ЗАДАЧ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ ВАРИАНТ» и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» заданы следующим образом:
М = 0,1 [МЭИ или МЭС ВЫБИРАЕТ датчик(и), а человек интерпретирует полученные данные];
G = 0,3 (МЭИ или МЭС помогает ОПЕРАТОРУ в РАЗРАБОТКЕ ВАРИАНТОВ для некоторых случаев);
S = 0,6 (МЭИ или МЭС помогает ОПЕРАТОРУ в ВЫБОРЕ наиболее оптимального ВАРИАНТА для всех случаев);
Е = 0,75 (МЭИ или МЭС осуществляет ВЫПОЛНЕНИЕ ЗАДАЧИ для некоторых случаев).
Подставляя эти значения в уравнение (А.2), определяют следующее значение УРОВНЯ АВТОНОМНОСТИ для рассматриваемого МЭИ:
УРОВЕНЬ АВТОНОМНОСТИ = v^M + w2G + w3S + w4E =
= 0,15- 0,2 + 0,15 • 0,3 + 0,25 ■ 0,6 + 0,45 0,75 = 0,5625.
Примечание — Такие числовые значения для УРОВНЯ АВТОНОМНОСТИ позволяют интерпретировать РИСК и меры по возможному снижению РИСКА для сценариев конкретных применений, когда изменения значений весовых коэффициентов и УРОВНЯ АВТОНОМНОСТИ основаны на том, приводит ли возрастание УРОВНЯ АВТОНОМНОСТИ к увеличению или снижению РИСКА в каждом конкретном случае.
Приложение В (справочное)
Примеры применения УРОВНЕЙ АВТОНОМНОСТИ к МЭИ/МЭС
В.1 Общие положения
Приведенные в данном приложении примеры показывают, как концепция УРОВНЯ АВТОНОМНОСТИ может быть применена к разным МЭИ и МЭС. Каждый пример включает:
а) описание применения МЭИ или МЭС и обоснование использования АВТОНОМНОСТИ;
Ь) объяснение того, почему конкретное МЭИ можно считать или не считать МЕДИЦИНСКИМ РОБОТОМ;
с) применение одного или более из трех методов классификации УРОВНЕЙ АВТОНОМНОСТИ, описанных в приложении А, для данного примера;
d) влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА, учитывающее примененные функции/ЗАДАЧИ и связанные с ними РИСКИ с использованием и без использования УРОВНЯ АВТОНОМНОСТИ’, е) выводы.
В.2 Пример 1. Экзоскелет нижних конечностей
В.2.1 Описание медицинских факторов
Помогающий экзоскелет нижних конечностей является носимым МЭИ, обеспечивающим поддержку и оказание помощи ПАЦИЕНТУ в улучшении его подвижности или формировании походки либо в восстановлении утраченной функции. Экзоскелет считают МЕДИЦИНСКИМ РОБОТОМ, если он обладает средствами очувствления, приводами и механизмами взаимодействия, позволяющими ПАЦИЕНТУ или ОПЕРАТОРУ взаимодействовать с системой и инициировать или останавливать надлежащую функциональность, реализуемую системой с использованием УРОВНЯ АВТОНОМНОСТИ. Пассивный экзоскелет, приводимый в движение, например, только с помощью пружинного механизма, не является МЕДИЦИНСКИМ РОБОТОМ, т. к. он не относится к МЭИ и не использует УРОВЕНЬ АВТОНОМНОСТИ для работы. В зависимости от физических и когнитивных способностей ПАЦИЕНТА может потребоваться введение некоторого УРОВНЯ АВТОНОМНОСТИ в работу системы на различных стадиях выполнения ЗАДАЧ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ ВАРИАНТ» и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ». В этом примере показан менеджмент РИСКОВ, связанных с введением УРОВНЯ АВТОНОМНОСТИ на этих стадиях.
В данном разделе представлены два примера, относящиеся к экзоскелетам нижних конечностей. В первом примере рассмотрен УРОВЕНЬ АВТОНОМНОСТИ полного экзоскелета, а во втором — основное внимание уделено одному аспекту, когда КЛИНИЧЕСКОЙ ФУНКЦИЕЙ такого экзоскелета является постановка стопы.
В.2.2 Метод классификации УРОВНЕЙ АВТОНОМНОСТИ
В.2.2.1 Помогающий экзоскелет
Рассматривают высокоуровневую КЛИНИЧЕСКУЮ ФУНКЦИЮ пожилого ПАЦИЕНТА, выполняющего ходьбу по ровной поверхности с использованием экзоскелета нижних конечностей, поддерживающего обе ноги с 20 %-ным дополнительным вспомогательным усилием. Все движения инициируются и контролируются ПАЦИЕНТОМ, который одновременно является ОПЕРАТОРОМ МЭИ. Механизм воспринимает движение ноги и силы взаимодействия, затем определяет фазу цикла походки и ВЫБИРАЕТ необходимые моменты в шарнирах для обеспечения заданного уровня силовой поддержки.
Для установления УРОВНЯ АВТОНОМНОСТИ при ходьбе по ровной поверхности с использованием экзоскелета использован метод весовых коэффициентов, представленный в приложении А. УРОВЕНЬ АВТОНОМНОСТИ каждой функции выбирают на основе оценки вклада МЭИ по сравнению с ОПЕРАТОРОМ вместо использования значений, связанных с конкретными характеристиками, приведенными на рисунке А.4.
НАБЛЮДАТЬ: при перемещении по ровной поверхности большую часть восприятий осуществляет ПАЦИЕНТ (например, ограничения внешней среды, необходимость сделать шаг и поддерживать общую устойчивость). МЭИ выполняет ЗАДАЧУ «НАБЛЮДАТЬ» при шагании на основе перемещений и усилий, прилагаемых ПАЦИЕНТОМ-ОПЕРАТОРОМ. Объем данных, контролируемых МЭИ, и их значимость могут быть оценены как 20 %, следовательно, М = 0,2.
РАЗРАБАТЫВАТЬ ВАРИАНТЫ: при рассмотрении КЛИНИЧЕСКОЙ ФУНКЦИИ ходьбы по ровной поверхности можно выделить несколько ВАРИАНТОВ, которые необходимо разработать (например, начало движения, остановка, скорость ходьбы, поддержание равновесия). Эти высокоуровневые ВАРИАНТЫ создаются ЗАДАЧЕЙ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ» и наиболее подходящий из них выбирает ПАЦИЕНТ (являющийся в данном случае ОПЕРАТОРОМ). Нога экзоскелета имеет предустановленные ВАРИАНТЫ поддержки (профиль крутящих моментов): а) для движения ноги в стадии переноса и Ь) движения ноги в опорной стадии. Количество вариантов, разработанных МЭИ, и их значимость могут быть оценены как 5 %, следовательно, G = 0,05.
ВЫБИРАТЬ ВАРИАНТ: МЭИ должно решить, генерирует ли оно крутящие моменты: а) для профиля стадии переноса ноги или Ь) профиля опорной стадии ноги. Другие ВАРИАНТЫ выбирает ОПЕРАТОР. Количество ВАРИАНТОВ, из которых МЭИ делает ВЫБОР, и их значимость могут быть оценены как 5 %, следовательно, S = 0,05.
ВЫПОЛНЯТЬ выбранный ВАРИАНТ: ВЫПОЛНЕНИЕ движений при ходьбе по ровной поверхности осуществляют совместно МЭИ и ОПЕРАТОР. Значение помогающего крутящего момента, обеспечиваемого МЭИ, может быть задано заранее для каждой ноги экзоскелета. В данном примере МЭИ обеспечивает 20 % от общего требуемого крутящего момента. При ходьбе по ровной поверхности необходимо обеспечить общую координацию движений тела, и это ВЫПОЛНЯЕТ ОПЕРАТОР. Процент движения ног по сравнению с движениями всего тела оценивают как 70 %. Поэтому общий процент вклада МЭИ в реализацию ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» может быть оценен как 20 % из 70 %, следовательно, Е = 0,14.
Отсутствует необходимость устанавливать разные весовые коэффициенты, поэтому им присваивают значение 0,25. Следовательно, подставляя в уравнение (А.2):
УРОВЕНЬ АВТОНОМНОСТИ =wyM+ w2G + w3S + w4E
значения vu1 = 0,25; w2 = 0,25; w3 = 0,25 и iv4= 0,25, получают:
УРОВЕНЬ АВТОНОМНОСТИ = 0,25 • 0,2 + 0,25 • 0,05 + 0,25 • 0,05 + 0,25 • 0,14 « 0,1.
В. 2.2.2 Подфункция постановки стопы
Одной из возможных КЛИНИЧЕСКИХ ФУНКЦИЙ медицинского экзоскелета для ходьбы является перемещение переносимой ноги в новое устойчивое положение опоры. В настоящем стандарте данная конкретная функция рассмотрена при ее реализации с разными УРОВНЯМИ АВТОНОМНОСТИ. В данном примере для установления УРОВНЯ АВТОНОМНОСТИ использован описательный метод, представленный в приложении А.
При перемещении переносимой ноги в устойчивое опорное положение при УРОВНЕ АВТОНОМНОСТИ, равном 2 (телеуправление или копирующее управление), ПАЦИЕНТ определяет оптимальное место для размещения стопы и перемещает ногу, а МЭИ помогает движениям, которые требуется реализовать ПАЦИЕНТУ (совместное решение ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ»).
При перемещении переносимой ноги в устойчивое опорное положение при УРОВНЕ АВТОНОМНОСТИ, равном 4 (совместное решение и совместная работа), ПАЦИЕНТ и МЭИ вычисляют или определяют оптимальное размещение стопы, ПАЦИЕНТ инициирует движение, которое затем реализует совместно с МЭИ.
При перемещении переносимой ноги в устойчивое опорное положение при УРОВНЕ АВТОНОМНОСТИ, равном 9 (ОПЕРАТОР осуществляет ЗАДАЧУ «НАБЛЮДАТЬ»), МЭИ вычисляет оптимальное размещение стопы и реализует движение по переносу ноги. ПАЦИЕНТ может вмешиваться по мере необходимости.
В.2.3 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
В.2.3.1 Помогающий экзоскелет
Для МЭИ, представленного в В.2.2.1, УРОВЕНЬ АВТОНОМНОСТИ может быть повышен при передаче большего числа компонентов, необходимых для ходьбы по ровной поверхности, от ПАЦИЕНТА или ОПЕРАТОРА к МЭИ вплоть до режима, при котором координацию и перемещение ног полностью осуществляет МЭИ при наличии высокоуровневого интерфейса, позволяющего ОПЕРАТОРУ принять решение, например только о начале и прекращении движения. В таблицах В.1 и В.2 показано влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для экзоскелета нижних конечностей.
Таблица В.1 — Пример 1. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Поддержка ходьбы по ровной поверхности пожилого ПАЦИЕНТА | Падение, спотыкание, скольжение, неустойчивость, столкновение | Улучшение координации суставов, контроля за походкой, восстановление равновесия после спотыкания, способность амортизировать опасную энергию в результате столкновений | Устранение ПАЦИЕНТА от управления может вызвать конфликт. Непрерывная координация ходьбы по ровной поверхности со стороны МЭИ (при высоком УРОВНЕ АВТОНОМНОСТИ) может привести к снижению контроля за ситуацией со стороны ПАЦИЕНТА (ОПЕРАТОРА). Это может вызвать дополнительные ОПАСНОСТИ, когда ПАЦИЕНТ (ОПЕРАТОР) должен взять управление на себя в опасных ситуациях | УРОВЕНЬ АВТОНОМНОСТИ основан на ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для человека в зависимости от его физических/невро-логических способностей (см. таблицу В.2) |
Таблица В.2 — Пример 1. Физические и когнитивные способности человека и требуемая КЛИНИЧЕСКАЯ ФУНКЦИЯ
Физические и когнитивные способности ПАЦИЕНТА (ТЯЖЕСТЬ) | Требуемая КЛИНИЧЕСКАЯ ФУНКЦИЯ |
С физическими нарушениями | Обеспечение физической поддержки по мере необходимости |
С неврологическими нарушениями | Регуляция моторики и физическая поддержка по мере необходимости |
Отсутствие физической функциональности, например повреждение спинного мозга | Обеспечение регуляции моторики и физического движения с использованием интерфейса, приспособленного под конкретного ПАЦИЕНТА |
В.2.3.2 Подфункция постановки стопы
В таблице В.З показано влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для конкретной КЛИНИЧЕСКОЙ ФУНКЦИИ на примере постановки стопы экзоскелета нижних конечностей.
Таблица В.З — Пример 1. Пример ЗАДАЧИ подфункции
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Перемещение переносимой стопы в устойчивое опорное положение | Столкновение стопы или ноги с объектами внешней среды (возможно, приводящее к падению) | При низком УРОВНЕ АВТОНОМНОСТИ поддержка со стороны МЭИ может привести к неожиданно быстрому перемещению ноги, управляемой только ПАЦИЕНТОМ. При более высоком УРОВНЕ АВТОНОМНОСТИ МЭИ управляет перемещением. При низком УРОВНЕ АВТОНОМНОСТИ совместное выполнение может привести к перемещению дальше целевого положения стопы, даже если перемещение идет в нужном направлении. При более высоком УРОВНЕ АВТОНОМНОСТИ МЭИ управляет перемещением | При высоком УРОВНЕ АВТОНОМНОСТИ может возникнуть РИСК столкновения с объектами внешней среды (например, с препятствиями), т. к. у контроллера МЭИ может отсутствовать представление о внешней среде | УРОВЕНЬ АВТОНОМНОСТИ основан на ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для отдельного ПАЦИЕНТА в зависимости от его физических/невро-логических способностей (см. таблицу 8.2) |
Падение из-за постановки стопы в неустойчивое положение | При достаточном понимании о состоянии внешней среды МЭИ может рассчитать и ВЫПОЛНЯТЬ перемещение в устойчивое положение стопы | При высоком УРОВНЕ АВТОНОМНОСТИ ПАЦИЕНТ со средней или высокой функциональностью может осуществить действие, соответствующее состоянию внешней среды (например, при наличии отверстия в полу), которое непонятно для МЭИ; при этом может возникнуть конфликт между целями ПАЦИЕНТА и МЭИ, что приведет к неустойчивому размещению стопы. | УРОВЕНЬ АВТОНОМНОСТИ основан на ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для отдельного ПАЦИЕНТА в зависимости от его физических/невро-логических способностей (см. таблицу 8.2) | |
Окончание таблицы В.З
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Перемещение переносимой стопы в устойчивое опорное положение | Когда безопасным перемещением переносимой ноги полностью и непрерывно управляет МЭИ (с высоким УРОВНЕМ АВТОНОМНОСТИ), это может привести к снижению осведомленности о намеченных устойчивых положениях стопы | |||
Неудача при выполнении намеченной функции (если этой функцией является способность ходить) | При низком УРОВНЕ АВТОНОМНОСТИ у ПАЦИЕНТА с недостаточной функциональностью может вообще отсутствовать способность к ходьбе | При высоком УРОВНЕ АВТОНОМНОСТИ ПАЦИЕНТ с недостаточной функциональностью может быть способен ходить | ||
В.2.4 Выводы
В.2.4.1 Помогающий экзоскелет
Для показанного в данном примере экзоскелета нижних конечностей может быть полезным наличие УРОВНЯ АВТОНОМНОСТИ в зависимости от физических и когнитивных способностей ПАЦИЕНТА. Если ПАЦИЕНТ обладает данными способностями, то МЭИ достаточно иметь предельно ограниченный УРОВЕНЬ АВТОНОМНОСТИ, тогда как более высокий УРОВЕНЬ АВТОНОМНОСТИ может привести к конфликтным ситуациям с намерениями ПАЦИЕНТА при выполнении некоторых функций. Если физические или когнитивные способности ПАЦИЕНТА ограничены, то использование повышенного УРОВНЯ АВТОНОМНОСТИ у МЭИ будет достаточно значимым и может быть полезным для ПАЦИЕНТА.
На основании данного примера можно заключить, что метод весовых коэффициентов является единственно возможным в том случае, если количественный вклад каждого компонента УРОВНЯ АВТОНОМНОСТИ (М, G, S, Е) может быть приблизительно оценен ИЗГОТОВИТЕЛЕМ. Данный метод может дать возможность исследовать влияние изменения УРОВНЯ АВТОНОМНОСТИ с помощью изменения весовых коэффициентов и оценки того, в каком случае будет достигнута наибольшая польза от значений М, G, S, Е.
В.2.4.2 Подфункция постановки стопы
Для конкретной подфункции перемещения стопы в фазе переноса в устойчивое положение продемонстрировано, что в зависимости от УРОВНЯ АВТОНОМНОСТИ МЭИ при выполнении данной функции конкретные РИСКИ возрастают, тогда как другие РИСКИ снижаются. В В.2.4.1 показано, что физические и неврологические способности ПАЦИЕНТА управлять экзоскелетом — это ключевые факторы при оценке этих РИСКОВ и определении УРОВНЯ АВТОНОМНОСТИ с наименьшим РИСКОМ при выполнении данной подфункции. На основании приведенного примера можно заключить, что описательный метод наиболее подходит в том случае, если рассматриваемая (под)функция является конкретной и четко определенной, и он может быть также применим и для всей системы.
В.З Пример 2. Ортопедический МЭИ/МЭС/МЕДИЦИНСКИЙ РОБОТ для восстановления первоначальной формы кости
В.3.1 Описание медицинских факторов
Медицинскими факторами для данного примера являются полная артропластика или замена тазобедренного сустава и артропластика коленного сустава для лечения заболеваний суставов, таких как остеоартрит. При этом целью является реконструирование суставной поверхности скелетно-мышечного соединения до нужной формы для имплантации искусственного сустава. Предоперационную визуализацию, например компьютерную томографию, используют для планирования надлежащей формы реконструированной кости. Ортопедическую фрезерную систему используют для восстановления формы кости на основе данных предоперационной визуализации, и в данном примере рассмотрены два типа конструкции системы. Первый тип конструкции, представляющий собой запрограммированную систему восстановления формы кости, не адаптируется к изменениям окружающей среды, например к неожиданному движению ПАЦИЕНТА. Во время лечения рабочим органом управляет МЭИ без вмешательства ОПЕРАТОРА на основе заранее запрограммированных параметров. Во втором типе конструкции, представляющей собой систему восстановления формы кости с тактильным регулированием, МЭИ помогает ОПЕРАТОРУ, направляя и приспосабливая движение или скорость фрезы, установленной на рабочем органе. Оптическая система или некоторые типы систем отслеживания объекта использованы в качестве визуальной обратной связи для идентификации и отслеживания расположения и смещения кости во время хирургической операции. Во время операции рабочим органом управляет ОПЕРАТОР, применяя интерактивную тактильную информацию от системы, предоставляющую ОПЕРАТОРУ силовую обратную связь и позволяющую ОПЕРАТОРУ чувствовать виртуальные стенки или границы «безопасных» областей или запланированных областей для реконструкции. Кроме того, скорость костной фрезы снижается или режущая кромка фрезы закрывается, как только ОПЕРАТОР достигнет «небезопасной» области, чтобы костная шлифовка могла быть выполнена только в запланированных границах.
Маршрут или траектория костной фрезы заранее программируется в РОБОТЕ, помогающем при ортопедической хирургической операции, который имеет АВТОНОМНОСТЬ типа РЕ, а информация о «безопасной» границе или области заранее программируется в РОБОТЕ с АВТОНОМНОСТЬЮ типа SC. Однако движение фрезы во время операции адаптивно регулируется или приспосабливается при частичном УРОВНЕ АВТОНОМНОСТИ, например: при контроле за нахождением фрезы и оперируемого хирургического объекта на плановой траектории или в плановом положении, при выполнении костной шлифовки путем настройки положения, скорости и/или усилия фрезы, необходимых для выполнения плана операции, при управлении рукой хирурга с помощью тактильной обратной связи или движением инструмента с помощью совместного способа управления вместе с хирургом в соответствии с плановыми безопасными границами и т. д.
МЭИ или МЭС, которые автоматически перемещает костную фрезу точно по заранее заданной траектории и/или по профилю скорости/усилия, примером которой является инфузионный насос с запрограммированным профилем скорости/объема введения лекарства, рассмотренный в В.3.4, при ее наличии, может быть рассмотрена ИЗГОТОВИТЕЛЕМ как разновидность управляемого компьютером фрезерного станка, но не как МЕДИЦИНСКИЙ РОБОТ, т. к. он выполняет операцию с низким УРОВНЕМ АВТОНОМНОСТИ при реализации плана операции.
В.3.2 Метод классификации УРОВНЯ АВТОНОМНОСТИ
Рассматривают два примера систем, а именно — систему предварительно запрограммированного МЕДИЦИНСКОГО РОБОТА для восстановления формы кости и систему с тактильным регулированием. Для того чтобы классифицировать общий УРОВЕНЬ АВТОНОМНОСТИ МЭИ, используют описательный метод, представленный в приложении А. Предварительно запрограммированная система восстановления формы кости может быть отнесена к уровню 3 — РЕ (предварительно запрограммированное выполнение), как показано в таблице А.1. Система выполняет костную шлифовку как заранее запрограммированное или запланированное хирургом действие. Хирург может временно приостановить или прервать работу МЕДИЦИНСКОГО РОБОТА при возникновении случайного события или чрезвычайной ситуации, например: неожиданное движение ПАЦИЕНТА или МЭИ, спонтанное прерывание работы системы визуализации, ненамеренное повреждение окружающих тканей с возникновением кровотечения и т. д. Система с тактильным регулированием может быть отнесена к уровню 4 — SD (совместное решение), как показано в таблице А.1. Система регулирования формирует тактильную обратную связь или настраивает скорость и обеспечивает выработку силы отталкивания или снижения скорости. Однако рабочий орган находится в руках ОПЕРАТОРА, и ОПЕРАТОР может преодолеть реакцию регулирования от МЭИ в случае необходимости. Хотя всю процедуру ОПЕРАТОР и МЭИ не выполняют совместно, от МЭИ в значительной степени зависит принятие решения по определению надлежащей области для проведения операции.
В.3.3 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
В таблице В.4 показано влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для двух МЭИ при восстановлении формы кости. Система с тактильным регулированием имеет более высокий УРОВЕНЬ АВТОНОМНОСТИ по сравнению с предварительно запрограммированной системой благодаря тому, что МЭИ выполняет ЗАДАЧУ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», используя сенсорные данные реального времени для ЗАДАЧИ «НАБЛЮДАТЬ», и помогает ОПЕРАТОРУ в ЗАДАЧЕ «ВЫПОЛНЯТЬ ВАРИАНТ» с помощью тактильной обратной связи.
Таблица В.4 — Пример 2. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Костная шлифовка | Неправильная шлифовка. Повреждение тканей | Система тактильного регулирования повышает точность и БЕЗОПАСНОСТЬ при движении инструмента (РОБОТ может предложить «исправить» границу — руководство движением). Система тактильного регулирования привлекает ОПЕРАТОРА к выполнению и снижает РИСК потери осведомленности о ситуации | — | Повышение УРОВНЯ АВТОНОМНОСТИ увеличивает зависимость от программного обеспечения при достижении приемлемого РИСКА. Это может повлиять на классификацию БЕЗОПАСНОСТИ программного обеспечения, и связанные с этим действия должны соответство-вать требованиям ГОСТ Р МЭК 62304 |
АВТОМАТИЧЕСКОЕ перемещение инструмента | Ошибка при управлении инструментом в движении | Повышенные точность и БЕЗОПАСНОСТЬ при движении инструмента (РОБОТ может предложить «исправить» границу — руководство движением) | Спонтанное прерывание работы МЭИ может нанести существенное повреждение ПАЦИЕНТУ (например, ошибка системы визуализации, прерывание работы человеком, потеря управления) | |
В.3.4 Выводы
Потенциальные РИСКИ, вызванные УРОВНЕМ АВТОНОМНОСТИ МЭИ данного типа, в основном связаны с идентификацией объекта хирургического вмешательства и точностью отслеживания. Работа предварительно запрограммированной исполнительной системы незначительно отличается от традиционных программируемых электронных медицинских устройств до тех пор, пока система восстановления формы кости и ПАЦИЕНТ сохраняют запланированные позицию и ориентацию во время всей медицинской процедуры. Как и в случае традиционного инфузионного насоса для введения лекарств, выполняющего запрограммированное введение лекарств без вмешательства человека в течение запрограммированного периода с запрограммированным значением скорости или по шаблону, МЭИ для восстановления формы кости проводит эту операцию в соответствии с планом. РИСКИ, связанные со спонтанным изменением положения и ориентации ПАЦИЕНТА относительно системы шлифовки или с неожиданным прерыванием работы устройства отслеживания и т. д., следует проанализировать надлежащим образом и устранить в рамках ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА. В случае добавления возможностей тактильного регулирования к системе шлифовки повышение УРОВНЯ АВТОНОМНОСТИ обеспечивает преимущества по точности, а также снижает РИСК.
В.4 Пример 3. Смена инструмента в хирургической установке с робототехнической поддержкой
В.4.1 Описание медицинских факторовВ данном примере рассмотрена хирургическая установка с робототехнической поддержкой (ХУРП), предназначенная для обеспечения точного перемещения хирургических инструментов при минимально инвазивных хирургических процедурах. Установка содержит телеуправляемый сервомеханизм, с помощью которого хирург управляет перемещениями хирургических инструментов, используя задающий контроллер и наблюдая при этом область хирургической операции по стереоизображению. В ходе хирургической операции хирургу требуется периодически заменять один инструмент другим для того, чтобы решать разные хирургические ЗАДАЧИ, например: вместо зажимов могут потребоваться ножницы, чтобы разрезать ткань. Данную ЗАДАЧУ выполняет ассистент хирурга, находящийся на стороне ПАЦИЕНТА, и она должна быть выполнена быстро, чтобы минимизировать прерывания хода хирургической операции и сократить время операции. Кроме того, инструмент должен быть введен приблизительно на ту же глубину, на которой находился замененный инструмент, чтобы хирург мог продолжить операцию в том же месте, не тратя время на повторное позиционирование инструмента. В данном примере рассмотрено введение УРОВНЯ АВТОНОМНОСТИ для решения конкретной ЗАДАЧИ по смене инструментов для данного типа ХУРП.
Примечание — ХУРП обозначают разными наименованиями, например хирургический РОБОТ, компьютеризированная хирургическая система и т. д. В некоторых юрисдикциях компетентные органы могут не признавать определение МЕДИЦИНСКОГО РОБОТА или РОБОТА, представленное в настоящем стандарте. В таких случаях ИЗГОТОВИТЕЛЬ может идентифицировать МЭИ или МЭС, используя общепринятые термины, такие как ХУРП.
В.4.2 Метод классификации УРОВНЯ АВТОНОМНОСТИ
В данном примере использован описательный метод, чтобы помочь понять влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для ЗАДАЧИ смены инструмента во время хирургической операции. ОПЕРАТОРАМИ в данном примере являются хирург и ассистент, расположенный вблизи ПАЦИЕНТА. Рассмотрены нижеприведенные три метода позиционирования при смене инструмента.
Полностью ручной. Инструмент постоянно находится под полным контролем ОПЕРАТОРА, и подачу инструмента с использованием визуальной обратной связи производит ассистент хирурга, видящий инструмент(ы) на экране дисплея. Кроме того, данная аппаратура не обеспечивает тактильную обратную связь. С учетом схемы описательной классификации, представленной в таблице А. 7, УРОВЕНЬ АВТОНОМНОСТИ ЗАДАЧИ смены инструмента в данном случае следует отнести к типу «Полностью ручной» (FM, индекс УРОВНЯ АВТОНОМНОСТИ = 1).
Ручная подача с помощью «запретных» зон. В данном примере МЭИ знает о расположении заменяемого инструмента и обеспечивает программно управляемую тактильную обратную связь, помогающую ОПЕРАТОРУ возвратить новый инструмент на ту же позицию, где располагался замененный инструмент. ОПЕРАТОР по-прежнему должен вручную переместить инструмент, но благодаря тактильной обратной связи он определяет границу, где траектория отличается от предыдущей позиции удаленного инструмента. Кроме того, в конце глубины введения инструмента также предусмотрен программно управляемый жесткий останов, чтобы инструмент не вошел глубже, чем располагался замененный инструмент. Это облегчает ОПЕРАТОРУ работу по быстрому возвращению инструмента на предыдущую позицию с прежней ориентацией. С учетом схемы описательной классификации, представленной в таблице А.1, УРОВЕНЬ АВТОНОМНОСТИ ЗАДАЧИ смены инструмента в данном примере следует отнести к типу «Совместное решение», когда МЭИ определяет место возврата инструмента и обеспечивает тактильную обратную связь для ОПЕРАТОРА, но ОПЕРАТОР тем не менее имеет полный контроль (SD, индекс УРОВНЯ АВТОНОМНОСТИ = 4).
Автоматизированное позиционирование с помощью МЭИ. В данном примере ОПЕРАТОР заменяет инструмент, а затем МЭИ автоматически возвращает инструмент в прежнее положение, которое занимал замененный инструмент, без вмешательства ОПЕРАТОРА. Это позволяет проводить максимально оперативную смену инструмента без участия ОПЕРАТОРА в позиционировании инструмента. Однако МЭИ не учитывает непредвиденные ситуации, такие как смещение тканей, поэтому ОПЕРАТОР должен НАБЛЮДАТЬ реализацию ЗАДАЧИ «ВЫПОЛНЯТЬ выбранный ВАРИАНТ» и останавливать ее при возникновении непредвиденной ситуации. С учетом схемы описательной классификации, представленной в таблице А. 7, УРОВЕНЬ АВТОНОМНОСТИ ЗАДАЧИ смены инструмента в данном примере следует отнести к типу «Руководимое решение», при котором ОПЕРАТОР должен инициировать или ВЫБИРАТЬ действие, а МЭИ должно полностью ВЫПОЛНЯТЬ его после инициирования ОПЕРАТОРОМ, присоединяя инструмент к установке (GD, индекс УРОВНЯ АВТОНОМНОСТИ = 7).
В.4.3 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Основной ОПАСНОСТЬЮ в данном примере является ненамеренный контакт с тканью, который может привести к ее повреждению. ТЯЖЕСТЬ повреждения может варьироваться в зависимости от типа ткани, силы соприкосновения и конфигурации наконечника инструмента, например: прокалывание может произойти, если острый инструмент введен с достаточным усилием и на большую глубину, чем расположение замененного инструмента. В таблице В.5 приведен сравнительный перечень УРОВНЕЙ АВТОНОМНОСТИ и описание участия ОПЕРАТОРА и МЭИ для трех методов, а также приведены комментарии в отношении РИСКА. В таблице В.6 показано влияние УРОВНЯ АВТОНОМНОСТИ на РИСК и приведены рекомендации по возможным действиям по снижению РИСКА.
Таблица В.5 — Пример 3. Сравнение вариантов реализации смены инструмента
Вариант | Описание | Комментарии |
Полностью ручной FM УРОВЕНЬ АВТОНОМНОСТИ = 1 | ОПЕРАТОР управляет введением инструмента, используя визуальную обратную связь | Неконтролируемые ошибки ОПЕРАТОРА. Потенциально высокая ТЯЖЕСТЬ повреждения |
Помощь в виде тактильной обратной связи (запретные зоны) SD УРОВЕНЬ АВТОНОМНОСТИ = 4 | ОПЕРАТОР управляет введением инструмента с программным ограничением траектории и глубины введения | УРОВЕНЬ АВТОНОМНОСТИ (тактильная обратная связь) снижает РИСК ошибки ОПЕРАТОРА. Контроль ОПЕРАТОРОМ введения инструмента снижает РИСК смещения ткани или других задач |
Окончание таблицы В. 5
Вариант | Описание | Комментарии |
Автоматическое позиционирование GD УРОВЕНЬ АВТОНОМНОСТИ = 7 | МЭИ автоматически возвращает инструмент в прежнее положение | УРОВЕНЬ АВТОНОМНОСТИ (автоматическое позиционирование)снижает РИСК ошибки ОПЕРАТОРА. Вмешательство ОПЕРАТОРА может потребоваться в случае смещения ткани или других задач |
Таблица В.6— Пример 3. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Смена инструмента | Повреждение ткани при введении | Автоматическое (программное) ограничение на введение инструмента уменьшает вероятность контакта с тканью из-за ошибки ОПЕРАТОРА при позиционировании инструмента. Автоматическое ограничение на введение и автоматическое введение инструмента сокращают время операции и снижают РИСК | Автоматическое ограничение на введение или автоматическое введение инструмента является неправильным или неправильно реализованным (превышение ожидаемой глубины введения инструмента). ОПЕРАТОР теряет осведомленность о ситуации при автоматическом введении инструмента и не может быстро отреагировать на непредвиденную ситуацию (например, быстрое смещение ткани) | Повышение УРОВНЯ АВТОНОМНОСТИ увеличивает зависимость от программного обеспечения при достижении приемлемого РИСКА. Это может повлиять на классификацию БЕЗОПАСНОСТИ программного обеспечения, и связанные с этим действия должны соответствовать требованиям ГОСТ Р МЭК 62304 |
В.4.4 Выводы
В данном примере повышение УРОВНЯ АВТОНОМНОСТИ увеличивает точность и скорость смены инструмента, а также может снизить РИСК повреждения тканей из-за ошибки ОПЕРАТОРА. В конечном счете решение об использовании того или иного УРОВНЯ АВТОНОМНОСТИ будет зависеть от нескольких факторов, определяемых конкретной реализацией. Кроме того, полностью АВТОМАТИЧЕСКОЕ позиционирование инструмента может привести к невнимательности или потере осведомленности о ситуации со стороны ОПЕРАТОРА и, как следствие, к повышению РИСКА, зависящего от необходимости выполнения срочных действий при смене инструмента. ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ в соответствии с ГОСТ Р МЭК 62366-1 должно помочь коллективу разработчиков оценить РИСКИ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ и компромиссы при проектировании. Более того, повышение УРОВНЯ АВТОНОМНОСТИ может повысить зависимость от программного обеспечения, реализующего тактильную обратную связь, для обеспечения БЕЗОПАСНОСТИ, что будет способствовать разработке программного обеспечения. ГОСТ Р МЭК 62304 содержит руководство по организации ПРОЦЕССОВ ЖИЗНЕННОГО ЦИКЛА программного обеспечения, предназначенного для медицинских приборов.
В.5 Пример 4. Хирургическая установка с робототехнической поддержкой, работающая в копирующем режиме
В.5.1 Описание медицинских факторов
В данном примере рассмотрена ХУРП, работающая в копирующем режиме, предназначенная для повышения точности движений хирургических инструментов при минимально инвазивных хирургических операциях. МЭИ содержит телеуправляемый сервомеханизм, с помощью которого хирург (ОПЕРАТОР) управляет движениями хирургических инструментов, используя задающий контроллер и наблюдая при этом область хирургической операции по стереоизображению. В данном примере рассмотрены разные УРОВНИ АВТОНОМНОСТИ для одного из этапов операции по определению целевой области для МЭИ при лапароскопической хирургической операции по удалению или разрезу ткани. В таблице В.7 представлен результат оценки влияния УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для данного примера.
В.5.2 Метод классификации УРОВНЯ АВТОНОМНОСТИ
В данном примере использован метод классификации УРОВНЕЙ АВТОНОМНОСТИ на основе весовых коэффициентов, в котором каждая функция имеет одинаковые весовые коэффициенты (0,25). Рассмотрены следующие сценарии:
- визуальная идентификация: ОПЕРАТОР идентифицирует целевую область, используя визуальную обратную связь через экран стереомонитора (УРОВЕНЬ АВТОНОМНОСТИ = 0.25/Л4 = 1, G = 0, S = 0, Е = 0);
- визуальная идентификация с улучшением изображения: ОПЕРАТОР идентифицирует целевую область, используя визуальную обратную связь, которая имеет возможность повысить качество изображения, чтобы помочь определить целевую область (УРОВЕНЬ АВТОНОМНОСТИ = 0,5 /М = 1, G = 0,6, S = 0,3, Е = 0,3);
- АВТОМАТИЧЕСКАЯ идентификация с сегментацией: МЭС идентифицирует целевую область в поле зрения ОПЕРАТОРА (УРОВЕНЬ АВТОНОМНОСТИ = 0,9/М = 1, G = 1, S = 1, Е = 0,6).
В данном примере использован метод классификации УРОВНЕЙ АВТОНОМНОСТИ на основе весовых коэффициентов.
8.5.3 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Таблица 8.7 — Пример 4. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Идентификация целевой области | Неправильное определение положения целевой области, приводящее к ненамеренному повреждению ткани | Повышение качества изображения улучшает идентификационную способность ОПЕРАТОРА. Сегментация позволяет идентифицировать особенности, не воспринимаемые человеческим глазом | Повышение качества и сегментация могут привести к ошибочной идентификации целевой области. Сегментация может привести к потере ОПЕРАТОРОМ осведомленности о ситуации | Повышение УРОВНЯ АВТОНОМНОСТИ увеличивает зависимость от программного обеспечения обработки изображения. Это может повлиять на классификацию БЕЗОПАСНОСТИ программного обеспечения и связанные с этим действия в соответствии с ГОСТ Р МЭК 62304 |
В.5.4 Выводы
Повышение УРОВНЯ АВТОНОМНОСТИ облегчает идентификацию целевой области и в общем случае снижает РИСК ненамеренного ошибочного пореза ткани при лапароскопической хирургической операции. При повышении УРОВНЯ АВТОНОМНОСТИ зависимость от программного обеспечения, реализующего повышение качества изображения и сегментацию, также должна возрастать. ГОСТ Р МЭК 62304 содержит руководство по организации ПРОЦЕССОВ ЖИЗНЕННОГО ЦИКЛА программного обеспечения для медицинских приборов. ПРОЕКТИРОВАНИЕ С УЧЕТОМ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ в соответствии с ГОСТ Р МЭК 62366-1 должно помочь коллективу разработчиков оценить РИСКИ ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ и компромиссы при проектировании. Кроме того, полностью АВТОМАТИЧЕСКАЯ идентификация с сегментацией может привести к невнимательности или потере осведомленности о ситуации у ОПЕРАТОРА и, как следствие, к повышению РИСКА, зависящего от доверия ОПЕРАТОРА к способности МЭИ правильно идентифицировать целевую область.
8.6 Пример 5. Установка лучевой терапии под визуальным контролем
В.6.1 Описание медицинских факторовТребования к установке лучевой терапии под визуальным контролем (ЛТВК) определены в [13]. ЛТВК представляет собой ПРОЦЕСС, при котором визуальное изображение используют при лечении ПАЦИЕНТА, обеспечивая настройку положения целевой области ПАЦИЕНТА относительно источника облучения таким образом, чтобы облучение попадало на целевую область ПАЦИЕНТА, указанную в плане дозной терапии.
МЭС для ПРОЦЕССА ЛТВК состоит из внешнего лучевого оборудования (ВЛО) и подключенной к нему и взаимодействующей с ним установки ЛТВК. Рабочая станция (или станции) наблюдения, которая может быть расположена вне процедурного кабинета, не является частью МЭС. Терапия начинается после инициации ПРОЦЕССА лечения, например нажатием на кнопку «ВКЛ». В данном примере рассмотрено влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА только для установки ЛТВК.
Установка ЛТВК в своем составе имеет формирователь изображения для получения двумерных и трехмерных изображений ПАЦИЕНТА. Данное изображение может быть получено с помощью различных типов фиксированных, неподвижно установленных, независимых и подвижных или интегрированных формирователей изображения. После получения изображения происходит расчет необходимых поправок, которые передаются на ВЛО.
В данном примере рассмотрена исключительно установка ЛТВК, УРОВЕНЬ АВТОНОМНОСТИ которой определяют регистрация реального изображения и расчет поправок. Конкретное оборудование, т. е. ВЛО, которое осуществляет перемещение для отработки поправок, не входит в состав установки ЛТВК, поэтому в этом случае ЛТВК не может считаться относящимся к робототехнике.
В.6.2 Метод классификации УРОВНЯ АВТОНОМНОСТИ
При рассмотрении УРОВНЕЙ АВТОНОМНОСТИ в таблицах А.1 и А.2 в части их использования при анализе изображения с целью определения отклонений вектора облучения ПАЦИЕНТА и передачи этих отклонений на линейный ускоритель установлено, что разные уровни могут быть сгруппированы в следующие три класса ЛТВК, основываясь на способности ОПЕРАТОРА НАБЛЮДАТЬ, РАЗРАБАТЫВАТЬ ВАРИАНТЫ, ВЫБИРАТЬ ВАРИАНТ и корректировать рассчитанные отклонения, передаваемые на линейный ускоритель:
- автономная ЛТВК, при которой получают изображение для настройки, после чего ПАЦИЕНТА отпускают на время проведения анализа изображения и вычисления необходимых отклонений. В большинстве случаев анализ изображения осуществляют в другом месте, и это делает другой ОПЕРАТОР, не ограниченный рамками МЭИ. При этом у ОПЕРАТОРА достаточно времени на проверку расчетов, выполняемых программным обеспечением;
- оперативная ЛТВК, при которой получение изображения для настройки, расчет поправок и их применение осуществляют до тех пор, пока ПАЦИЕНТ остается в положении для лечения на МЭИ. В данном случае у ОПЕРАТОРА время на проверку правильности рассчитанных поправок ограничено. Если он определяет, что поправки рассчитаны неправильно, то следует либо отменить лечебную процедуру, либо провести новый расчет поправок;
- ЛТВК реального времени, при которой изображение для настройки формируется во время лечебной процедуры и поправки, рассчитанные установкой ЛТВК, используются непосредственно для управления линейным ускорителем без вмешательства ОПЕРАТОРА. На данном уровне ОПЕРАТОР может иметь или не иметь возможности определять правильность расчетов в пределах требуемых допусков на время реакции.
Описательный метод дает классификацию повышения УРОВНЯ АВТОНОМНОСТИ в МЭИ для ЛТВК, приведенную в таблице В.8.
Таблица В.8 — Пример 5. Описательная классификация УРОВНЯ АВТОНОМНОСТИ МЭИ для ЛТВК
Уровень | Обозначение | Класс ЛТВК | ||
1 | Полностью ручной (FM) | Автономная ЛТВК | Оперативная ЛТВК | — |
2 | Телеуправление (ТО) | |||
3 | Запрограммированное выполнение (РЕ) | |||
4 | Совместное решение (SD) | |||
5 | Поддержка решения (DS) | |||
6 | Смешанное решение (BD) | |||
7 | Руководимое решение (GD) | |||
8 | Автономное решение (AD) | — | — | ЛТВК реального времени |
9 | Контроль оператора (ОМ) | |||
10 | Полная автономность (FA) | |||
Перекрытие УРОВНЕЙ АВТОНОМНОСТИ для первых двух классов имеет место потому, что в данном случае УРОВЕНЬ АВТОНОМНОСТИ не является единственным фактором, приводящим к увеличению РИСКА, другим существенным фактором является количество времени, которое необходимо ОПЕРАТОРУ для реакции на рассчитанную и примененную информацию.
При использовании бинарного метода классификации четыре части медицинской процедуры, а именно — НАБЛЮДАТЬ, РАЗРАБАТЫВАТЬ, ВЫБИРАТЬ и ВЫПОЛНЯТЬ, должны быть правильно определены для лучевой терапии:
- НАБЛЮДАТЬ: регистрация изображения, получение информации об изображении;
- РАЗРАБАТЫВАТЬ: расчет поправок, которые должны быть применены исходя из предварительной информации об изображении и полученных изображений;
- ВЫБИРАТЬ: рассчитанные поправки могут быть либо оценены ОПЕРАТОРОМ и изменены или одобрены, либо установка ЛТВК реализует рассчитанное отклонение АВТОНОМНО;
- ВЫПОЛНЯТЬ: применение поправок путем изменения плана лечения либо смещения соответствующих осей линейного ускорителя.
Бинарный метод дает классификацию повышения УРОВНЯ АВТОНОМНОСТИ в МЭИ для ЛТВК, приведенную в таблице В. 9.
Таблица В.9 — Бинарная классификация УРОВНЕЙ АВТОНОМНОСТИ
Уровень | ВЫПОЛНЯТЬ | ВЫБИРАТЬ | РАЗРАБАТЫВАТЬ | НАБЛЮДАТЬ | Автономная ЛТВК | Оперативная ЛТВК | ЛТВК реального времени |
0 | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | X | X | — |
1 | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | МЭИ | — | X | — |
2 | ОПЕРАТОР | ОПЕРАТОР | МЭИ | ОПЕРАТОР | — | X | — |
3 | ОПЕРАТОР | ОПЕРАТОР | МЭИ | МЭИ | — | X | — |
4 | ОПЕРАТОР | МЭИ | ОПЕРАТОР | ОПЕРАТОР | — | X | — |
5 | ОПЕРАТОР | МЭИ | ОПЕРАТОР | МЭИ | — | X | — |
6 | ОПЕРАТОР | МЭИ | МЭИ | ОПЕРАТОР | — | X | — |
7 | ОПЕРАТОР | МЭИ | МЭИ | МЭИ | — | X | — |
8 | МЭИ | ОПЕРАТОР | ОПЕРАТОР | ОПЕРАТОР | X | — | — |
9 | МЭИ | ОПЕРАТОР | ОПЕРАТОР | МЭИ | — | — | — |
10 | МЭИ | ОПЕРАТОР | МЭИ | ОПЕРАТОР | — | — | — |
11 | МЭИ | ОПЕРАТОР | МЭИ | МЭИ | — | — | — |
12 | МЭИ | МЭИ | ОПЕРАТОР | ОПЕРАТОР | — | — | — |
13 | МЭИ | МЭИ | ОПЕРАТОР | МЭИ | — | — | — |
14 | МЭИ | МЭИ | МЭИ | ОПЕРАТОР | — | — | — |
15 | МЭИ | МЭИ | МЭИ | МЭИ | — | — | X |
Для более четкого понимания и разграничения между тремя классами ЛТВК таблица В.9 построена относительно графы «ВЫПОЛНЯТЬ». Следует отметить, что значение уровня соответствует исходному бинарному порядку.
В.6.3 АНАЛИЗ РИСКА на каждом УРОВНЕ АВТОНОМНОСТИ
Автономная ЛТВК: УРОВЕНЬ АВТОНОМНОСТИ для автономной ЛТВК находится в диапазоне от 1 до 7 (для описательного метода) либо равен 0 и 8 (для бинарного метода), соответственно. В обоих методах классификации наивысшие УРОВНИ АВТОНОМНОСТИ не используют, так как ЗАДАЧИ «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» исполняет ОПЕРАТОР.
Оперативная ЛТВК: УРОВЕНЬ АВТОНОМНОСТИ для оперативной ЛТВК находится в диапазоне от 1 до 7 (для описательного метода) либо равен 0, 2, 4, 6, 8, 10, 12, 14 (для бинарного метода), соответственно. В обоих методах классификации наивысшие УРОВНИ АВТОНОМНОСТИ не используют, т. к. ЗАДАЧИ «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» исполняет ОПЕРАТОР. Основное различие между автономной ЛТВК и оперативной ЛТВК состоит в определении того промежутка времени, в течение которого должна быть выполнена ЗАДАЧА «ВЫБИРАТЬ».
ЛТВК реального времени: УРОВЕНЬ АВТОНОМНОСТИ для ЛТВК реального времени находится в диапазоне от 8 до 10 (для описательного метода) либо равен 15 (для бинарного метода), соответственно. В обоих методах классификации ЛТВК имеет высокий УРОВЕНЬ АВТОНОМНОСТИ. Главным образом, это является следствием того, что ЗАДАЧИ «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» реализуются только с помощью МЭИ.
ИЗГОТОВИТЕЛЬ должен решить, какой метод классификации использовать — описательный или бинарный. В случае неопределенности рекомендуется предположить, что подходящим является тот метод, в соответствии с которым ЛТВК имеет более высокий УРОВЕНЬ АВТОНОМНОСТИ.
В.6.4 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Исходя из приведенной выше оценки влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА является наиболее существенным для оперативной ЛТВК и ЛТВК реального времени. АВТОНОМНОСТЬ в основном используют для повышения точности облучения с помощью обнаружения и компенсации смещения целевой области до или во время терапии.
В таблице В.10 представлены результаты оценки влияния УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для МЭИ данного типа.
Таблица В. 10— Пример 5. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Оперативная ЛТВК | Ошибка в правильном определении целевой позиции и неточный расчет предполагаемых целевых позиций приводят к неправильной позиции ОБЛУЧЕНИЯ и неправильному лечению ПАЦИЕНТА | Более точная установка позиции для облучения ПАЦИЕНТА за счет более точного определения целевой позиции и более точного расчета предполагаемой поправки с помощью использования более точного алгоритма анализа изображения и всех доступных данных для регистрации изображения и расчета поправок | Неправильная установка положения ПАЦИЕНТА из-за неправильно вычисленной целевой позиции ввиду неправильной регистрации изображения либо неправильного расчета поправок, а ОПЕРАТОР не может обнаружить это до начала лечения, отсутствие осведомленности о ситуации | Оперативная ЛТВК повышает точность первоначального позиционирования, но не учитывает смещения ПАЦИЕНТА и целевой области, после применения поправок и начала лечения |
ЛТВК реального времени | Ошибка в правильном определении положения и смещения целевой области, неточное прогнозирование предполагаемых положения и смещения целевой области, неточный расчет предполагаемых положений целевой области, ограничения ВЛО, неспособного реализовать заданные изменения, приводящие к ошибочной зоне облучения и неправильному лечению ПАЦИЕНТА | Усовершенствование всего процесса лечения ПАЦИЕНТА благодаря оперативным АВТОМАТИЧЕСКИМ настройкам параметров лечения, связанных со смещением целевой области, и исключение здоровых тканей из зоны облучения. Облучение незамедлительно отключается при обнаружении ограничений оборудования, и нежелательное облучение не происходит из-за медленной реакции ОПЕРАТОРА | Автоматизированные настройки параметров лечения запаздывают или неправильные. Столкновения между ПАЦИЕНТОМ и МЭИ более вероятны из-за многократно применяемых АВТОМАТИЧЕСКИХ настроек параметров лечения. ОПЕРАТОР теряет осведомленность о ситуации во время ПРОЦЕССА ЛТВК реального времени и не может быстро отреагировать на чрезвычайную ситуацию | — |
В.6.5 Выводы
При лечении с помощью ЛТВК реального времени используют более высокий УРОВЕНЬ АВТОНОМНОСТИ для достижения более точного наведения луча, позволяющего снизить плановую лучевую нагрузку в интересах ПАЦИЕНТА. Поскольку снижение вероятности повышенного РИСКА происходит благодаря предоставлению ОПЕРАТОРУ изображений и информации о позиции, повышается значимость ЭКСПЛУАТАЦИОННОЙ ПРИГОДНОСТИ для оценки того, сможет ли ОПЕРАТОР обработать возросший объем информации. Кроме того, повышение УРОВНЯ АВТОНОМНОСТИ приводит к необходимости оценки вероятности потери ОПЕРАТОРОМ осведомленности о ситуации для каждого конкретного случая. В настоящее время полная АВТОНОМНОСТЬ не допускается для подобных систем согласно ГОСТ Р МЭК 60601-2-1, поскольку требуется, чтобы ОПЕРАТОР мог ПРЕРВАТЬ лечебную процедуру в любое время.
В.7 Пример 6. Автоматический наружный дефибриллятор
В.7.1 Описание медицинских факторов
АВТОМАТИЧЕСКИЙ наружный дефибриллятор (АНД) предназначен для нормализации сердечного ритма с помощью подачи электрического импульса через электроды, приложенные к коже ПАЦИЕНТА. Его используют для (неотложного) лечения угрожающей жизни сердечной аритмии, такой как фибрилляция желудочков и желудочковая тахикардия с отсутствием пульса. У АНД отсутствуют приводы, и он не может перемещаться в окружаю-38
щей среде, поэтому не является МЕДИЦИНСКИМ РОБОТОМ. АНД рассмотрен в данном приложении в качестве примера, поскольку он является МЭИ с высоким УРОВНЕМ АВТОНОМНОСТИ при выполнении некоторых своих функций в отличие от классических дефибрилляторов с ручным управлением. Поскольку дефибрилляторы обычно используют в неотложных ситуациях, то, как правило, с ними работают в людных общественных местах. Электрический шок, вызванный дефибриллятором, опасен для нормально работающего сердца, поэтому АНД используют тогда, когда работа дефибриллятора, однажды запущенная ОПЕРАТОРОМ, обеспечивает автоматический анализ ЭКГ, получаемой от электродов, расположенных на коже ПАЦИЕНТА, определение сердечных ритмов и автоматическое включение дефибриллятора при обнаружении шокового ритма. Если ручной дефибриллятор предназначен для использования медицинским работником, то АНД — для использования ОПЕРАТОРОМ, который не является профессионалом, снижая при этом РИСК при применении устройства. В данном примере рассмотрен ПРОЦЕСС автоматизации ПРОЦЕССА дефибрилляции.
В.7.2 Метод классификации УРОВНЯ АВТОНОМНОСТИ
При использовании дефибриллятора функции ЗАДАЧ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» могут быть определены следующим образом:
- НАБЛЮДАТЬ: обнаружение возможных неотложных ситуаций (фибрилляция желудочков); измерение сердечного ритма для выявления потенциальной фибрилляции желудочков; определение нужного момента для подачи электрического импульса;
- РАЗРАБАТЫВАТЬ: электрический импульс разной интенсивности, Дж, или отсутствие импульса;
- ВЫБИРАТЬ: электрический импульс выбранной интенсивности или отсутствие импульса;
- ВЫПОЛНЯТЬ: подведение и подключение дефибриллятора к ПАЦИЕНТУ (выполняется как шаг 1, т. е. при выполнении ЗАДАЧИ «НАБЛЮДАТЬ»); подача электрического импульса выбранной интенсивности в нужный момент времени.
Для оценки УРОВНЯ АВТОНОМНОСТИ у АНД использован описательный метод. В таблице В.11 представлена информация, необходимая для классификации АНД в соответствии с описательным методом.
Таблица В. 11 — Пример 6. Описательный метод классификации УРОВНЯ АВТОНОМНОСТИ для наружного дефибриллятора
Функция | Описание | В ручном дефибрилляторе | ВАНД | УРОВЕНЬ АВТОНОМНОСТИ АНД |
НАБЛЮДАТЬ | а) Обнаружение возможных неотложных ситуаций | а) ОПЕРАТОР | а) ОПЕРАТОР | Совместно, но МЭИ выполняет КЛИНИЧЕСКУЮ ФУНКЦИЮ (пункты b и с) |
Ь) Измерение сердечного ритма для выявления возможных ситуаций сердечной фибрилляции | Ь) ОПЕРАТОР с возможной поддержкой со стороны МЭИ | Ь) МЭИ | ||
с) Определение нужного момента для подачи электрического импульса | с) ОПЕРАТОР | с) МЭИ | ||
РАЗРАБАТЫВАТЬ | Электрический импульс определенной интенсивности в нужные моменты времени или отсутствие импульса | ОПЕРАТОР с ограниченными заранее выбранными ВАРИАНТАМИ | МЭИ с ограниченными заранее выбранными ВАРИАНТАМИ3 | МЭИ |
ВЫБИРАТЬ | Электрический импульс выбранной интенсивности в выбранный момент времени или отсутствие импульса | ОПЕРАТОР | МЭИ | МЭИ |
ВЫПОЛНЯТЬ | а) Доставка дефибриллятора к ПАЦИЕНТУ и его включение | а) ОПЕРАТОР | а) ОПЕРАТОР | Совместно, но МЭИ выполняет КЛИНИЧЕСКУЮ ФУНКЦИЮ (пункт с) |
Ь) Размещение датчиков (электродов) дефибриллятора на коже ПАЦИЕНТА | Ь) ОПЕРАТОР | Ь) ОПЕРАТОР под руководством МЭИ | ||
с) Подача выбранного импульса (КЛИНИЧЕСКАЯ ФУНКЦИЯ) | с) ОПЕРАТОР | с) МЭИЬ |
Окончание таблицы В. 11
а Поскольку ВАРИАНТЫ заранее выбраны ИЗГОТОВИТЕЛЕМ, дефибриллятор может также быть классифицирован как АВТОМАТИЧЕСКИЙ, но т. к. работа АНД может быть не до конца понятна ОПЕРАТОРУ, то предпочтительнее говорить об УРОВНЕ АВТОНОМНОСТИ устройства.
ь Иногда МЭИ указывает нужный момент времени для подачи импульса, но при этом ОПЕРАТОР должен разрешить применить разряд нажатием кнопки; это означает, что ОПЕРАТОР всегда может ВЫБИРАТЬ ВАРИАНТ «отсутствие импульса».
В соответствии с описательным методом работа АНД может быть классифицирована на УРОВЕНЬ АВТОНОМНОСТИ, равный 9, когда ОПЕРАТОР выполняет ЗАДАЧУ «НАБЛЮДАТЬ» (ОМ): МЭИ реализует ЗАДАЧИ «РАЗРАБАТЫВАТЬ ВАРИАНТЫ», «ВЫБИРАТЬ ВАРИАНТ» для исполнения и «ВЫПОЛНЯТЬ выбранный ВАРИАНТ». ОПЕРАТОР контролирует работу МЭИ и вмешивается при необходимости. Такое вмешательство означает, что ОПЕРАТОР решает ВЫБРАТЬ другой ВАРИАНТ. Во время данной процедуры могут существовать точки принятия решений, которые осуществляет МЭИ.
В.7.3 Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
В таблице В. 12 представлено влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для АНД.
Таблица В. 12— Пример 6. Влияние УРОВНЯ АВТОНОМНОСТИ на ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА
Функция/ ЗАДАЧА | ОПАСНОСТИ | Влияние повышения УРОВНЯ АВТОНОМНОСТИ | Дополнительные комментарии | |
Снижение РИСКА | Увеличение РИСКА | |||
Подача электрического импульса выбранной интенсивности в выбранный момент времени | Летальный исход или ухудшение состояния ПАЦИЕНТА из-за того, что МЭИ не может подать электрический импульс (ЭКСПЛУАТАЦИОННАЯ ПРИГОДНОСТЬ выходит из строя) | Влияние отсутствует | Влияние отсутствует | Это зависит от действий ОПЕРАТОРА (в основном от правильного размещения электродов) или от общей неисправности МЭИ как с низким, так и с высоким УРОВНЕМ АВТОНОМНОСТИ |
Летальный исход или ухудшение состояния ПАЦИЕНТА из-за того, что МЭИ не подает импульс в нужный момент времени | Если устройство правильно установлено, то более высокий УРОВЕНЬ АВТОНОМНОСТИ приводит к меньшему числу неправильно поданных электрических импульсов, особенно в случае непрофессионального ОПЕРАТОРА | Профессиональные ОПЕРАТОРЫ могут в некоторых случаях принимать более оптимальные решения, чем АНД | — | |
ОПЕРАТОР получает удар электрическим током | Влияние отсутствует | Влияние отсутствует | Это зависит от действий ОПЕРАТОРА (размещение электродов) для МЭИ как с низким, так и с высоким УРОВНЕМ АВТОНОМНОСТИ | |
Летальный исход или ухудшение состояния ПАЦИЕНТА из-за того, что выбран неправильный ВАРИАНТ (электрический импульс) | Наличие УРОВНЯ АВТОНОМНОСТИ позволяет РАЗРАБАТЫВАТЬ и ВЫБИРАТЬ более оптимальные ВАРИАНТЫ, чем ВАРИАНТЫ непрофессионального ОПЕРАТОРА | Профессиональный ОПЕРАТОР может в некоторых случаях принимать более оптимальное решение, чем АНД | — | |
В.7.4 Выводы
Поскольку АНД предназначен для применения непрофессиональным ОПЕРАТОРОМ, то повышение УРОВНЯ АВТОНОМНОСТИ может снизить некоторые РИСКИ БЕЗОПАСНОСТИ, связанные с его использованием. Автоматизация этих функций и обеспечение возможности непрофессионалу применять устройство требуют, чтобы АНД надлежащим образом инструктировал ОПЕРАТОРА во время работы. Такие инструкции способствуют осведомленности ОПЕРАТОРА о ситуации в части выполнения определенных ЗАДАЧ и снижают необходимость его знакомства с деталями работы устройства. Автоматизация ЗАДАЧ «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» для опытного ОПЕРАТОРА может привести к меньшему снижению или отсутствию снижения связанных с ними РИСКОВ.
Приложение С (справочное)
Характеристики БЕЗОПАСНОСТИ ПАЦИЕНТОВ, учитываемые в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ
С.1 Категории ПАЦИЕНТОВ
ПРОЦЕСС МЕНЕДЖМЕНТА РИСКА для МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ, может быть частью системы менеджмента качества организации. Интеграция должна обеспечить использование информации о РИСКЕ в качестве основы для принятия решений на всех уровнях данной организации, касающихся МЭИ или МЭС. Интеграция предусматривает не только включение установленных и стандартизованных инструментов и ПРОЦЕССОВ МЕНЕДЖМЕНТА РИСКА в существующие системы менеджмента качества. Она требует адаптации и модификации этих инструментов и ПРОЦЕССОВ в соответствии с потребностями лиц, принимающих решения, и существующими у них ПРОЦЕССАМИ принятия решений. Ключевым разделом ПРОЦЕССА МЕНЕДЖМЕНТА РИСКА является анализ характеристик БЕЗОПАСНОСТИ ПАЦИЕНТА для обеспечения ОСНОВНОЙ БЕЗОПАСНОСТИ и ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК МЭИ или МЭС при введении некоторого УРОВНЯ АВТОНОМНОСТИ, так как МЭИ или МЭС, обладающие некоторым УРОВНЕМ АВТОНОМНОСТИ, могут использовать алгоритмы для идентификации категорий ПАЦИЕНТОВ и их характеристик БЕЗОПАСНОСТИ.
Как правило, различают следующие категории ПАЦИЕНТОВ:
а) недоношенный ребенок/преждевременно рожденный ребенок (преждевременные роды);
Ь) новорожденный ребенок (с момента рождения до 1 мес);
с) младенец (от 1 мес до 2 лет);
d) ребенок (от 2 до 12 лет);
е) подросток (от 12 лет до 21 года);
f) взрослый (от 21 года до 65 лет);
д) пожилой/престарелый (старше 65 лет).
Примечания
1 К подгруппам педиатрии относят новорожденных [ЭД, младенцев [ЭД, детей [ЭД и подростков [е^].
2 Пол ПАЦИЕНТА может быть его существенной характеристикой.
3 Указанные выше годы принадлежности ПАЦИЕНТОВ к разным категориям приведены исключительно для справки; в настоящее время отсутствует международно признанное деление ПАЦИЕНТОВ на возрастные категории.
Более высокие уровни РИСКА обнаруживают на возрастных границах разных категорий ПАЦИЕНТОВ. Для некоторых ПАЦИЕНТОВ категорий a), b), с), d) и д) обычно существуют более высокие уровни РИСКА, поскольку меры по УПРАВЛЕНИЮ РИСКОМ, содержащиеся в учебном пособии или в руководстве оператора, а также отображенные на маркировке, как правило, не могут быть ими использованы для УПРАВЛЕНИЯ РИСКОМ. Не все ПАЦИЕНТЫ этих категорий могут прочитать инструкции и соответственно имеют ограниченные возможности избежать ОПАСНОСТИ; дополнительная информация приведена в [14].
С.2 Дополнительное внимание к БЕЗОПАСНОСТИ детей (ПАЦИЕНТОВ)
БЕЗОПАСНОСТЬ детей должна быть одной из наиболее значимых задач, стоящих перед обществом, так как травмы в детском и подростковом возрасте являются главной причиной смертности и инвалидности во многих странах. Дети входят во взрослый мир, не имея опыта избегания РИСКА или оценки степени РИСКА, но испытывая естественное желание все исследовать. Следовательно, вероятность получения травм наиболее высокая в детском возрасте. Необходимо разрабатывать дополнительные стратегии предотвращения детского травматизма, поскольку контроль, обеспечивающий полное предотвращение потенциально опасных действий, невозможен и практически неосуществим.
Стратегии вмешательства, направленные на защиту детей, должны учитывать, что дети — это не маленькие взрослые. Подверженность детей травмам и характер их травм отличаются от аналогичных у взрослых людей. Подобные стратегии вмешательства должны также учитывать основной принцип, что дети не ЗЛОУПОТРЕБЛЯЮТ предметами или окружающей средой, а они взаимодействуют с ними, используя способы, отражающие обычное детское поведение, которое варьируется в зависимости от возраста и уровня развития ребенка. Поэтому стратегии вмешательства, направленные на защиту детей, могут отличаться от стратегий, предназначенных для защиты взрослых.
Так как травмы детей тесно связаны со стадией их развития и их подверженностью ОПАСНОСТЯМ в разном возрасте, следует классифицировать данные о детских травмах по возрастным группам, чтобы выявить возникающие закономерности.
Определение надлежащих мер по УПРАВЛЕНИЮ РИСКОМ основано на методах эпидемиологии, проектирования и биомеханики и технических достижениях. При выборе профилактических мер следует учитывать, что допустимые уровни РИСКА для взрослых могут не подходить для защиты детей. При использовании мер, разработанных для защиты взрослых, необходимо принимать во внимание все возможные последствия, которые могут повысить РИСКИ для детей (например, подушки безопасности со стороны пассажира в автомобилях). Должны быть рассмотрены также характеристики ПАЦИЕНТА, связанные с БЕЗОПАСНОСТЬЮ МЭИ.
Характеристики ПАЦИЕНТА, рассмотренные в данном разделе, должны быть рассмотрены в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА в соответствии с ГОСТ ISO 14971—2011 (4.2).
С.З Возможности и вариабельность физиологических сигналов ПАЦИЕНТА
С.3.1 Руководство (см. [15])
Возможности и вариабельность ПАЦИЕНТА подробно описаны в [15]. В данном разделе приведены краткие сведения, относящиеся к УРОВНЮ АВТОНОМНОСТИ.
С.3.2 Изменяющиеся потребности и возможности ПАЦИЕНТОВ
Потребности и возможности ПАЦИЕНТОВ изменяются на протяжении их жизни — с детства до старости, а возможности людей в любой конкретной возрастной группе существенно различаются. Функциональные и когнитивные ограничения варьируются от сравнительно незначительных нарушений до более экстремальных форм. Следует отметить, что, хотя некоторые ограничения могут быть незначительными, но в сочетании, как в случае старения, они могут создавать значительные затруднения, особенно при введении УРОВНЯ АВТОНОМНОСТИ в МЭИ или МЭС для разных категорий ПАЦИЕНТОВ.
Ниже приведены описания функций организма или возможностей ПАЦИЕНТА и их практических последствий для того, чтобы повысить понимание и осведомленность о том, как возможности человека влияют на ОСНОВНУЮ БЕЗОПАСНОСТЬ и ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ХАРАКТЕРИСТИКИ МЭИ и МЭС при введении некоторого УРОВНЯ АВТОНОМНОСТИ.
С.3.3 Сенсорные возможности ПАЦИЕНТА
Сенсорные возможности ПАЦИЕНТА могут быть важны для функций М, G, S, Е в МЭИ или МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ. Ниже приведены основные сенсорные возможности.
Зрение
Зрение связано с ощущением присутствия света и восприятием формы, размера, внешнего облика и цвета визуальных объектов.
Слух
Слуховые функции связаны с восприятием присутствия звуков и различением расположения, высоты тона, громкости, качества и понимания звуков.
Осязание
Осязательные функции связаны с ощущением поверхностей и их текстуры или качества. Существует зависимость и от других стимулов, особенно визуальных и слуховых.
Вкус/запах
Вкус и запах являются разными чувствами, но они сгруппированы вместе из-за их схожего практического значения. Вкус связан с восприятием четырех основных ощущений (горького, сладкого, кислого и соленого) с помощью рецепторов на языке. Обоняние связано с использованием рецепторов в носу для восприятия ароматов и запахов. Два чувства вкуса и запаха используют вместе для определения диапазона ароматов, которые могут быть различимы.
Равновесие
Способность поддерживать равновесие и избегать падения зависит от сложной системы, включающей мозг, координирующий визуальные стимулы, обратную связь от вестибулярного аппарата в ушах и движения конечностей. Непрерывный контроль равновесия необходим при выполнении практически всех видов деятельности.
С.3.4 Физические возможности ПАЦИЕНТА
Физические возможности ПАЦИЕНТА могут быть важны для функций «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» в МЭИ или МЭС, обладающих определенным УРОВНЕМ АВТОНОМНОСТИ. Ниже приведены некоторые основные физические возможности.
Ловкость
Ловкость относится к действиям с использованием рук и кистей, в частности: с координированными действиями по обращению с предметами, их взятием, манипулированием и отпусканием, используя одну руку, пальцы и, более конкретно, большие пальцы.
Манипулирование
Манипулирование относится к действиям по ношению, перемещению и перестроению объектов. Оно включает действия с использованием ног, ступней, рук и кистей: приближение, поднятие, укладывание, толкание, ударение, захватывание, отпускание, вращение, бросание и хватание.
Перемещение
Перемещение относится к действиям по изменению расположения тела и перемещению себя из одного места в другое с использованием ног, ступней, рук и кистей.
Сила и выносливость
Сила относится к усилию, вырабатываемому при сокращении мышцы или групп мышц при выполнении некоторой деятельности. Сила может быть усилием, развиваемым конкретной частью тела при определенном действии (например, при толкании) или приложенным к конкретному объекту (например, открывание крышек на бутылках). К таким действиям относятся натяжение, поднятие, давление, сгребание, сжимание и скручивание. Сила также зависит от выносливости, способности поддерживать приложенное усилие. Это может быть связано с работой сердца и легких. Ограниченная сила характерна для многих состояний, связанных с физическими недостатками, и является обычной причиной неспособности управлять оборудованием.
Голос
Голос относится к звукам, производимым голосовыми органами, обычно в форме речи. Нарушения речи могут влиять на речь в целом или только на отдельные ее аспекты, например: на артикуляцию, громкость, плавность, скорость, мелодичность и ритм.
С.3.5 Когнитивные возможности ПАЦИЕНТА
Когнитивные возможности ПАЦИЕНТА могут быть важны для функций «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» в МЭИ или МЭС, обладающих определенным УРОВНЕМ АВТОНОМНОСТИ. Ниже приведены некоторые из основных когнитивных возможностей.
Общие
Познавательная способность подразумевает понимание, интеграцию и обработку информации. Информация включает в себя абстракцию и организацию идей, а также управление временем.
Интеллект
Под интеллектом понимают способность знать, понимать и рассуждать.
Память
Память относится к специфическим умственным функциям регистрации и хранения информации и ее извлечения по мере необходимости.
Язык и грамотность
Язык и грамотность являются особыми ментальными функциями распознавания и использования знаков, символов и других компонентов языка.
С.3.6 Аллергии ПАЦИЕНТА
Аллергии ПАЦИЕНТА могут быть важны для функций «НАБЛЮДАТЬ», «РАЗРАБАТЫВАТЬ», «ВЫБИРАТЬ» и «ВЫПОЛНЯТЬ» в МЭИ или МЭС, обладающих определенным УРОВНЕМ АВТОНОМНОСТИ. Ниже приведены некоторые из основных аллергий.
Контактные аллергии
Контактные аллергии вызваны аллергенами, которые попадают в организм через кожу. В частности, они содержатся в пудрах, лосьонах, духах, ароматизированных изделиях, косметике, бытовой химии, некоторых металлах или латексе, а также могут присутствовать во многих бытовых, строительных и электрических приборах. Контактная аллергия распространена примерно у 15 % населения и часто длится всю жизнь.
Пищевые аллергии
Пищевая аллергия является реакцией или непереносимостью одного или нескольких продуктов питания. Большое число продуктов питания могут вызвать аллергические реакции, наиболее распространенными являются молоко, пшеница, соя, яйца, арахис и рыба. Пищевые красители, консерванты и пищевые добавки также могут быть основными причинами аллергических реакций.
Респираторные аллергии ПАЦИЕНТОВ
Переносимые по воздуху аллергены попадают в организм при вдохе, к ним относятся пыль, пыльца, клещи, плесень и экскременты животных. Наиболее типичной респираторной аллергией является астма, которая приводит к сужению дыхательных путей и одышке.
Приложение ДА (справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного документа
Таблица ДА. 1
Структура настоящего стандарта | Структура международного документа IEC/TR 60601-4-1:2017 |
— | Приложение А Обоснование определения понятий АВТОМАТИЧЕСКИЙ, АВТОНОМНОСТЬ и УРОВЕНЬ АВТОНОМНОСТИ и различие между МЕДИЦИНСКИМИ РОБОТАМИ и другими МЭИ и МЭС |
— | Приложение В УРОВНИ АВТОНОМНОСТИ и относящиеся к ним термины, используемые в стандартах по МЭИ |
Приложение А Примеры методов классификации УРОВНЕЙ АВТОНОМНОСТИ | Приложение С Примеры методов классификации УРОВНЕЙ АВТОНОМНОСТИ |
Приложение В Примеры применения УРОВНЕЙ АВТОНОМНОСТИ к МЭИ/МЭС | Приложение D Примеры применения УРОВНЕЙ АВТОНОМНОСТИ к МЭИ/МЭС |
Приложение С Характеристики БЕЗОПАСНОСТИ ПАЦИЕНТОВ, учитываемые в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для МЭИ/МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ | Приложение Е Характеристики БЕЗОПАСНОСТИ ПАЦИЕНТОВ, которые следует учитывать в ПРОЦЕССЕ МЕНЕДЖМЕНТА РИСКА для МЭИ/МЭС, обладающих некоторым УРОВНЕМ АВТОНОМНОСТИ |
— | Приложение F Система управления с физиологической обратной связью и УРОВНИ АВТОНОМНОСТИ |
— | Приложение G Примеры распределенных ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК |
Приложение ДА Сопоставление структуры настоящего стандарта со структурой примененного в нем международного документа | — |
Приложение ДБ Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном документе | — |
Примечание — Сопоставление структуры стандартов приведено начиная с приложения В, так как предыдущие разделы стандарта идентичны. | |
Приложение ДБ (справочное)
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном документе
Таблица ДБ.1
Обозначение ссылочного национального, межгосударственного стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ ISO 14971—2011 | IDT | ISO 14971:2007 «Изделия медицинские. Применение менеджмента риска к медицинским изделиям» |
ГОСТ Р МЭК 60601-1—2022 | IDT | IEC 60601-1:2005 «Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик» |
ГОСТ Р МЭК 62304—2013 | IDT | IEC 62304:2006 «Программные средства медицинского оборудования. Жизненный цикл программного продукта» |
ГОСТ Р МЭК 62366-1—2021 | IDT | IEC 62366-1:2015 «Изделия медицинские. Часть 1. Проектирование медицинских изделий с учетом эксплуатационной пригодности» |
ГОСТ Р МЭК 80001-1—2015 | ЮТ | IEC 80001-1:2010 «Информатизация здоровья. Менеджмент рисков в информационно-вычислительных сетях с медицинскими приборами. Часть 1. Роли, ответственности и действия» |
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT — идентичные стандарты. | ||
Библиография
[1] | IEC/TR 61850-90-7:2013 (IEC/TR 61850-90-7:2013) | Системы и сети связи для автоматизации энергосистем общего пользования. Часть 90-7. Объектные модели для силовых преобразователей в системах распределенных энергоресурсов (DER) [Communication networks and systems for power utility automation — Part 90-7: Object models for power converters in distributed energy resources (DER) systems] |
[2] | Руководство ИСО/МЭК 63:2012 (ISO/IEC Guide 63:2012) | Руководство по разработке и включению аспектов безопасности в международные стандарты на медицинские изделия (Guide to the development and inclusion of safety aspects in International Standards for medical devices) |
[3] | Руководство ИСО/МЭК 2:2004 (ISO/IEC Guide 2:2004) | Стандартизация и смежные виды деятельности. Общий словарь (Standardization and related activities — General vocabulary) |
[4] | МЭК 60601-1-10:2007 МЭК 60601-1-10:2007/ Изменение 1:2013 (IEC 60601-1-10:2007 IEC 60601-1-10:2007/Amd. 1:2013) | Изделия медицинские электрические. Часть 1-10. Общие требования безопасности с учетом основных функциональных характеристик. Дополнительный стандарт. Требования к разработке контроллеров с физиологической обратной связью (Medical electrical equipment — Part 1-10: General requirements for basic safety and essential performance — Collateral Standard: Requirements for the development of physiologic closed-loop controllers) |
[5] | ИСО 80601-2-56:2009 (ISO 80601-2-56:2009) | Изделия медицинские электрические. Часть 2-56. Частные требования безопасности с учетом основных функциональных характеристик к медицинским термометрам для измерения температуры тела (Medical electrical equipment — Part 2-56: Particular requirements for basic safety and essential performance of clinical thermometers for body temperature measurement) |
[6] | МЭК 80601-2-59:2008 (IEC 80601-2-59:2008) | Изделия медицинские электрические. Часть 2-59. Частные требования безопасности с учетом основных функциональных характеристик к тепловизорам для скрининга фебрильной температуры тела человека (Medical electrical equipment — Part 2-59: Particular requirements for the basic safety and essential performance of screening thermographs for human febrile temperature screening) |
[7] | МЭК 80601-2-30:2009 МЭК 80601-2-30:2009/ Изменение 1:2013 (IEC 80601-2-30:2009 IEC 80601-2-30:2009/Amd.1:2013) | Изделия медицинские электрические. Часть 2-30. Частные требования безопасности с учетом основных функциональных характеристик к автоматическим неинвазивным сфигмоманометрам (Medical electrical equipment— Part 2-30: Particular requirements for the basic safety and essential performance of automated non-invasive sphygmomanometers) |
[в] | ИСО 80601-2-61:2011 (ISO 80601-2-61:2011) | Изделия медицинские электрические. Часть 2-61. Частные требования безопасности с учетом основных функциональных характеристик к пульсоксиметру (Medical electrical equipment — Part 2-61: Particular requirements for basic safety and essential performance of pulse oximeter equipment) |
[9] | МЭК 60601-2-26:2012 (IEC 60601-2-26:2012) | Изделия медицинские электрические. Часть 2-26. Частные требования безопасности с учетом основных функциональных характеристик к электроэнцефалографам (Medical electrical equipment — Part 2-26: Particular requirements for the basic safety and essential performance of electroencephalographs) |
[70] | МЭК 60601-2-40:2016 (IEC 60601-2-40:2016) | Изделия медицинские электрические. Часть 2-40. Частные требования безопасности с учетом основных функциональных характеристик к электромиографам и приборам с вызванным ответом (Medical electrical equipment — Part 2-40: Particular requirements for the basic safety and essential performance of electromyographs and evoked response equipment) |
[77] | ISO/TR 24971 (ISO/TR 24971) | Изделия медицинские. Руководство по применению ISO 14971 (Medical devices — Guidance on the application of ISO 14971) |
[72] МЭК 80001 (все части) [IEC 80001 (all parts)] | Применение менеджмента рисков для ИТ-сетей, включающих медицинские приборы (Application of risk management for IT-networks incorporating medical devices) |
[73] МЭК 60601-2-68:2014 (IEC 60601-2-68:2014) | Изделия медицинские электрические. Часть 2-68. Частные требования безопасности с учетом основных функциональных характеристик к рентгеновскому радиотерапевтическому оборудованию с визуализационным контролем, используемому с ускорителями электронов, терапевтическому оборудованию с применением пучка легких ионов и пучка радионуклидов (Electrical medical equipment — Part 2-68: Particular requirements for the basic safety and essential performance of X-ray-based image-guided radiotherapy equipment for use with electron accelerators, light ion beam therapy equipment and radionuclide beam therapy equipment) |
[14] ISO/TR 22411:2021 (ISO/TR 22411:2021) | Данные по эргономике, используемые при применении ISO/IEC Guide 71:2014 (Ergonomics data for use in the application of ISO/IEC Guide 71:2014) |
[75] Руководство ИСО/МЭК 71:2014 (ISO/IEC Guide 71:2014) | Руководство по решению в стандартах вопросов создания доступной среды (Guide for addressing accessibility in standards) |
УДК 64-83:64.06:007.52:006.86:006.034
ОКС 11.040.01
25.040.30
Ключевые слова: роботы, робототехнические устройства, медицинские электрические изделия, медицинские электрические системы, автономность, уровни автономности, медицинские роботы
Редактор Л. С. Зимилова Технический редактор В.Н. Прусакова Корректор М.В. Бучная Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 29.09.2023. Подписано в печать 05.10.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 6,05. Уч.-изд. л. 4,85.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}