ГОСТ Р 57630-2017/IEC/TS 62736:2016
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Техника ультразвуковая
СКАНЕРЫ ЭХО-ИМПУЛЬСНЫЕ
Упрощенные методы испытаний на постоянство параметров системы формирования изображений
Ultrasonics. Pulse-echo scanners. Simple methods for periodic testing to verify stability of an imaging system's elementary performance
ОКС 11.040.55
Дата введения 2018-07-01
Предисловие
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью "Научно-технический центр "МЕДИТЭКС" (ООО "НТЦ "МЕДИТЭКС") на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 011 "Медицинские приборы, аппараты и оборудование"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 августа 2017 г. N 975-ст
4 Настоящий стандарт идентичен международному документу IEC/TS 62736:2016* "Техника ультразвуковая. Сканеры эхо-импульсные. Упрощенные методы испытаний на постоянство параметров системы формирования изображений" (IEC/TS 62736:2016 "Ultrasonics - Pulse-echo scanners - Simple methods for periodic testing to verify stability of an imaging system's elementary performance", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт устанавливает методы для испытаний на постоянство параметров в части проверки элементарной стабильности эксплуатационных характеристик системы визуализации. Ультразвуковой эхо-импульсный сканер позволяет получать изображения ткани в плоскости сканирования посредством перемещения узкого импульсного ультразвукового луча через область интереса и обнаружения эхосигналов, генерируемых за счет отражения на границах ткани и рассеивания в пределах тканей. Для работы в передающем/принимающем режиме для формирования/обнаружения ультразвуковых сигналов используют различные типы датчиков. Ультразвуковые сканеры находят широкое применение в медицинской практике для получения изображения паренхиматозных органов
во всем человеческом организме. Поскольку ультразвуковые системы часто являются средствами получения значимой информации при принятии решений, имеющих значение для пациентов, и их использование сопряжено с жесткими временными ограничениями и возможно в различной обстановке, то, соответственно, важна стабильная работа системы на уровне, определенном при базовых испытаниях, например по МЭК 61391-1 и МЭК 61391-2.
________________
Испытания относятся к испытаниям на постоянство параметров по ГОСТ Р 56606-2015 "Контроль технического состояния и функционирования медицинских изделий".
Паренхиматозные органы - органы, преимущественно состоящие из мягких тканей.
Настоящий стандарт считается необходимым, так как в отсутствие однозначных и документированных методов испытаний неудовлетворительные эксплуатационные характеристики систем часто остаются незамеченными или принимаются как должное. Во всех системах, кроме самых старых, наиболее распространенными случаями некачественного функционирования являются неудовлетворительные эксплуатационные характеристики таких элементов, как решетка из датчиков, объектив, кабель или электронный канал. В настоящем стандарте представлены методики чувствительных испытаний для преобразователей в части проверки однородности изображения и для выявления отказов в каналах. Испытания необходимо проводить ежемесячно (уровень 1), два раза в год (уровень 2) и раз в два года (уровень 3). Как правило, ежегодно при первом испытании доли выявленных некачественно функционирующих преобразователей и систем составляют 14% и 10% [1], [2], [3], [4], [5], [6], [7], [8], [9], [10], [11], [12], соответственно около 100000 систем по всему миру каждые полгода проходят испытание с неоптимальными результатами.
Это обычное явление неоптимальных результатов испытаний создало необходимость в стандартизации контроля качества (КК) и процедур оценки эксплуатационных характеристик. Стандартизация необходима для повышения эффективности испытаний посредством широкого применения эффективных процедур КК, а также для развенчивания мифов об эффективности существующих методик испытаний. Разработчики настоящего стандарта полагают, что существующие национальные стандарты и руководства [13], [14] приводят слишком много методик испытаний, а также несоответствующие методики испытаний для обнаружения и распознавания общих недостатков в диагностических ультразвуковых системах во время обычного КК. Эти методики включают такие испытания, как проверка пространственного разрешения, которая является неэффективной и относится к процедурам оценки эксплуатационных характеристик, а не к КК.
Современная технология плоского дисплея является более стабильной и в целом намного превосходит используемые ранее мониторы на основе электронно-лучевых трубок (ЭЛТ-мониторы). Тем не менее на жидкокристаллических дисплеях (ЖК-дисплеях) может наблюдаться дрейф яркости, а также дефектные пиксели. Соответственно их по-прежнему необходимо периодически оценивать.
Настоящий стандарт является прямым применением IEC/TS 62736, являющегося техническим описанием, подготовленным техническим комитетом МЭК 87 "Ультразвук".
Текст международного документа основан на следующих документах:
Запрос проекта | Отчет о голосовании |
87/576/DTS | 87/592A/PVC |
Полную информацию о голосовании по утверждению международного документа можно найти в отчете о голосовании, который указан в приведенной выше таблице.
Редакция международного документа подготовлена в соответствии с Директивами ИСО/МЭК, часть 2.
Термины, выделенные жирным шрифтом, определены в разделе 3.
Символы и формулы выделены курсивным шрифтом.
1 Область применения
Настоящий стандарт определяет требования и методы испытаний на постоянство параметров с целью периодического КК диагностических медицинских ультразвуковых систем с линейными решетками, криволинейными решетками, единичным элементом, кольцевой решеткой, фазированной решеткой, матричными линейными ультразвуковыми датчиками и датчиками с двумерными решетками. В настоящий стандарт включены интерпретации изображений и измерения рабочих станций. Как правило, понятия "периодические испытания", "испытания на постоянство параметров" употребляются как "контроль качества". Настоящий стандарт представляет собой минимальный набор методик испытаний, предназначенных для частых пользователей медицинских ультразвуковых систем, для специалистов по КК в своей организации или нанятых для КК организацией и/или поставщиками услуг организаций. Системно-производственные и ремонтные компании могут использовать другие или дополнительные методы испытаний. Определены три уровня испытаний, включая наиболее простой, экономически целесообразный и выполняемый чаще всего уровень, подобный рассмотренному в [1]. Более полные методы для приемочных испытаний и оценки в периоды особой важности указаны в МЭК 61391-1, МЭК 61391-2 и IEC/TS 62791 [15]. Эти более полные испытания классифицируют как оценку эксплуатационных характеристик, а не как КК или частые периодические испытания.
Настоящий стандарт также определяет условия и методы измерения в реальном времени максимальной относительной глубины зондирования ультразвуковых сканеров В-режима (для обеспечения качества или КК), хотя это измерение считается редко применяющимся.
Испытания с целью оценки погрешности частотных методов определения дальности рекомендуются только для некоторых классов кодирования позиций, которые в настоящее время характеризуются стабильностью и отсутствием смещения.
Типы преобразователей, используемых с этими сканерами, включают в себя:
- механические датчики;
- электронные фазированные решетки;
- линейные решетки;
- криволинейные решетки;
- двумерные решетки;
- датчики трехмерного сканирования на основе сочетания указанных выше типов.
Преобразователи нелегко поддаются испытанию преобразовательного элемента с помощью простых процедур оценки однородности изображения (например, фазированной решеткой и 2D-решеткой из преобразователей), данными методами частично проверяют максимальную относительную глубину зондирования. Производителям систем рекомендуется предоставлять шаблоны импульсных сигналов отдельных элементов преобразователей для обеспечения проверок отдельных элементов или малых групп элементов, что позволит пользователям обнаружить существенный отказ элемента или обеспечит доступ к другой реализации, а также снабжать программу испытаний элементов необходимыми пояснениями. В настоящем стандарте не рассматриваются системы, предназначенные для допплеровских исследований, поскольку для их проверки требуется специализированное оборудование. Специфика этого испытательного оборудования может зависеть от предполагаемого применения допплеровской системы.
Все сканеры основаны на использовании эхо-импульсных методов. Ошибки, обнаруженные посредством рекомендуемых эхо-импульсных испытаний, будут влиять на работу других режимов, таких как цветное картирование, выделение гармонической составляющей, эластометрия и компаундирование изображения. Методика испытаний применима для преобразователей, работающих в диапазоне частот от 1 до 17 МГц, и может быть применима до частоты 40 МГц, если глубина зондирования относительна, а не абсолютна, и подтверждена стабильность фантома [15]. КК однородности изображения применим к преобразователям, работающим в диапазоне частот от 1 до 40 МГц, при этом предъявляемые к фантомам требования не являются жесткими.
Примечание - Производителям фантомов рекомендуется расширить диапазон частот, для которых предназначены фантомы, с целью охвата измерений относительной глубины зондирования систем, работающих на основных и гармонических частотах выше 17 МГц.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на стандарты* и другие нормативные документы, которые необходимо учитывать при его использовании. Для датированных ссылок применяют только указанные издания. Для недатированных ссылок применяют самые последние издания (включая любые изменения и поправки).
________________
* Таблицу соответствия ссылочных международных стандартов национальным см. по ссылке. - .
IEC 60050-802, International Electrotechnical Vocabulary - Part 802: Ultrasonics (Международный электротехнический словарь. Часть 802. Ультразвук) (доступен на http://www.electropedia.org/)
IEC 61391-1, Ultrasonics - Pulse-echo scanners - Part 1: Techniques for calibrating spatial measurement systems and measurement of system point-spread function response (Ультразвуковая техника. Сканеры, работающие по принципу отраженных импульсов. Часть 1. Методы калибрования пространственных измерительных систем и измерения характеристики функции рассеяния точки системы)
________________
В тексте IEC/TS 62736:2016 ошибочно применена недатированная ссылка: должна быть ссылка на IEC 61391-1:2006.
IEC 61391-2, Ultrasonics - Pulse-echo scanners - Part 2: Measurement of maximum depth of penetration and local dynamic range (Ультразвуковая техника. Сканеры, работающие по принципу отраженных импульсов. Часть 2. Измерение максимальной глубины проникновения и локального динамического диапазона)
________________
В тексте IEC/TS 62736:2016 ошибочно применена недатированная ссылка: должна быть ссылка на IEC 61391-2:2010.
3 Термины и определения
В настоящем стандарте использованы термины и определения, приведенные в МЭК 60050-802, и применяются следующие правила.
ИСО и МЭК поддерживают терминологические базы данных для использования в области стандартизации по следующим адресам:
- МЭК Электропедия: доступна на http://www.electropedia.org/;
- ИСО Интернет-сайт: доступен на http://www.iso.org/obp.
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 адресуемая группа (addressable patch): Адресуемая группа элементов преобразователя, имеющая минимальный размер.
3.2 эхосигналы от слабоотражающих фоновых рассеивателей (echo from weakly reflecting, background scatterers): Эхосигналы от множества мишеней небольшого размера, поле рассеяния которых имеет значительно меньшую интенсивность, чем интенсивность падающего поля.
3.3 максимальная глубина зондирования (maximum depth of penetration): Максимальная глубина, на которой отношение усредненного значения оцифрованных данных В-изображения, соответствующих эхосигналам от слабоотражающих фоновых рассеивателей, к усредненному значению оцифрованных данных В-изображения, соответствующих только электронному шуму, равно 1,4. При этом эхосигналы от слабоотражающих фоновых рассеивателей формируются с помощью фантома, отвечающего требованиям МЭК 61391-2.
Примечание - Максимальная глубина зондирования выражается в метрах, м, и, как правило, в сантиметрах, см.
3.4 максимальная относительная глубина зондирования (maximum relative depth of penetration): Максимальная глубина, на которой отношение усредненного значения оцифрованных данных В-изображения, соответствующих эхосигналам от слабо отражающих фоновых рассеивателей, к усредненному значению оцифрованных данных В-изображения, соответствующих только электронному шуму, равно 1,4. При этом эхосигналы от слабо отражающих фоновых рассеивателей формируются с помощью фантома, отвечающего менее строгим требованиям относительно МЭК 61391-2.
Примечание 1 - Прилагательное "относительная" используется потому, что характеристики фантома, определенные в настоящем стандарте, могут трактоваться настолько свободно, что результаты измерений "максимальной глубины зондирования", полученные с помощью разных фантомов, не могут сравниваться. Измерения предназначены только для испытаний стабильности, т.е. сравнения измерений, полученных на одном и том же фантоме в различное время.
Примечание 2 - Информация по доступным фантомам и техническим характеристикам приведена в [16], а потенциальные альтернативные методы измерения глубины зондирования - в [17].
Примечание 3 - Максимальная относительная глубина зондирования выражается в метрах, м, и, как правило, в сантиметрах, см.
3.5 медианное абсолютное отклонение; МАО (median absolute deviation; MAD): Медиана абсолютных значений отклонений от медианы набора данных.
Примечание - МАО аналогично стандартному отклонению, но, как медиана линейных, а не квадратичных отклонений, оно более устойчиво к разбросам [18].
3.6 оценка эксплуатационных характеристик (performance evaluation): Испытания, проводимые для оценки эксплуатационных характеристик объекта испытаний.
Примечание - Типичными моментами для оценки эксплуатационных характеристик ультразвуковой системы являются: оценка эксплуатационных характеристик при предпродажной подготовке, приемочные испытания новых и восстановленных систем [19], [20], [21], [22], [1] при возникновении проблем с эксплуатационными характеристиками в конце срока службы. Данные испытания рекомендуется проводить на уровне 3 КК, хотя это и не обязательно.
3.7 фантом (phantom): Устройство, предназначенное для имитации некоторых участков человеческого тела для целей испытания или обучения.
3.8 удельный коэффициент ослабления (specific attenuation coefficient): Отношение коэффициента ослабления к частоте.
Примечание - Удельный коэффициент ослабления, выраженный в децибелах на сантиметр на мегагерц (дБ·см·МГц
), явно предполагает линейную зависимость коэффициента ослабления от частоты.
3.9 контроль качества; КК (quality control; QC): Регулярно выполняющиеся действия, призванные обеспечить стабильность эксплуатационных характеристик.
Примечание - Более информативным термином является "поддержание качества", также используется термин "обеспечение качества".
3.10 эквивалентная чувствительность (equivalent sensitivity): Чувствительность с теми же статистическими параметрами или имеющая меньшую дисперсию и смещение.
4 Общие рекомендации
Техническая документация изготовителя должна позволять проводить сравнение с результатами, полученными посредством методов испытаний, описанных в настоящем стандарте.
5 Условия окружающей среды
Все испытания необходимо проводить при следующих условиях окружающей среды:
- температура (23±16)°С для испытаний равномерности структуры; (23±3)°С для других испытаний;
- относительная влажность от 10% до 95%; от 45% до 75% для испытаний относительной глубины зондирования;
- атмосферное давление от 66 до 106 кПа; от 86 до 106 кПа для испытаний относительной глубины зондирования.
Свойства ультразвуковых фантомов, такие как скорость звука, коэффициент обратного рассеяния и коэффициент ослабления, как известно, зависят от температуры. Для определения возможности сохранения акустических свойств фантома в указанных выше условиях окружающей среды необходимо изучить технические характеристики, представленные изготовителем фантома. Если акустические свойства не сохраняются, то для проведения испытаний принимаются те условия окружающей среды, при которых на фантоме могут быть получены ожидаемые и повторяемые результаты, или объект должен быть адаптирован для проведения испытаний.
6 Уровни контроля качества
6.1 Общие сведения
Разделение КК на уровни осуществляется исходя из временного диапазона, необходимого для проведения испытаний, и интервалов между ними. Не ожидается, что небольшие компании, в которых зачастую имеется единственная ультразвуковая система, будут проводить испытания уровня 3, за исключением испытаний с целью оценки дисперсии и смещения при измерении расстояний или при возникновении проблем, которые невозможно решить быстрым обращением в сервисную службу. Эти уровни аналогичны рекомендуемым Европейской федерацией обществ по применению ультразвука в медицине и биологии [1].
6.2 Испытания уровня 1
Испытания уровня 1 кратковременные (примерно 5 мин), должны выполняться пользователями ультразвуковой системы ежемесячно, не требуют специального оборудования, осуществляется только ведение записей. Они просты для выполнения и документирования при ограниченной практике. Можно использовать проверенные альтернативные методы испытаний эквивалентной чувствительности и интерпретации результатов для конечных пользователей. Методы испытаний приведены в таблице 1.
Таблица 1 - План испытаний уровня 1
Испытание | Оценка | Возможное последующее действие |
Проверка: | Визуальная | Проведение испытаний уровня 2 или технического обслуживания (сразу или в интервале времени, определенном изготовителем) |
Однородность изображения | Визуальная, при чистой поверхности датчика, находящегося в воздухе | Проведение испытаний уровня 2 или технического обслуживания |
Функция мониторинга | Визуальная | Проведение испытаний уровня 3, регулировки или технического обслуживания |
Функции печати бумажных копий и сохранения изображений | Визуальная | Регулировка или техническое обслуживание |
Эксплуатационные характеристики в клинической практике | Опрос пользователей о наличии изменений в эксплуатационных характеристиках системы или об их ухудшении. | Проведение испытаний уровня 2 или 3, регулировки или технического обслуживания |
Поскольку испытания уровней 1 и 2 просты, может быть целесообразно осуществлять КК силами профессионалов, таких как медицинский физик или инженер больницы, которых привлекают для обеспечения проведения испытаний и надлежащего учета записей в течение длительного периода времени.
6.3 Испытания уровня 2
Испытания уровня 2 проводят каждые 6 мес пользователи или специалисты по КК. Они включают в себя простые испытания уровня 1, более чувствительные испытания однородности изображения и любые другие испытания, показанные для специальных условий, таких как механически проверяемые датчики. Более чувствительные испытания однородности изображения выполняют с фантомом и с усреднением кинопетли (см. раздел 9). Могут быть использованы проверенные альтернативные методы испытаний эквивалентной чувствительности и интерпретации результата конечным пользователем.
6.4 Испытания уровня 3
Испытания уровня 3 выполняют специалисты КК каждые два года. Они предназначены для обнаружения или проверки дефектов, которые встречаются реже, чем те, которые могут быть обнаружены с помощью проверки однородности изображения, и они требуют более специализированных и стабильных фантомов. Эти испытания включают в себя как минимум испытания уровней 1 и 2, измерение максимальной относительной глубины зондирования, а также проверки системного и графического дисплеев. Для некоторых систем проведение испытаний с целью оценки дисперсии и смещения при измерении расстояний необходимо на начальном этапе, для других систем такие испытания должны осуществляться регулярно (см. таблицу 2 и раздел 10). Также как и при оценке эксплуатационных характеристик, измерение максимальной относительной глубины зондирования и другие дополнительные измерения рекомендуется осуществлять в абсолютных величинах, чтобы была возможность проведения сравнения с результатами других измерений, но данная рекомендация не является обязательной. Эти измерения следует выполнять единообразно, чтобы была возможность обнаружить изменения в ультразвуковых системах, испытанных в течение многих лет. Приемочные испытания и другие оценки всех эксплуатационных характеристик являются частью полного КК, но рассматриваются отдельно, поскольку они охватываются другими стандартами, описанными ранее. Некоторые методы испытаний уровня 3 указаны в качестве ссылки. В крупных медицинских организациях с большим числом недорогих ультразвуковых систем проведение испытаний уровня 3 и даже уровня 2 для всех сканеров может быть не всегда оправдано. В таких ситуациях быстрая замена с последующим ремонтом или восстановлением может являться ответной мерой на проблемы при испытаниях уровня 1. Проведение испытаний уровня 3 целесообразно для 10 или 20 единиц ежегодно. В небольших и возможно изолированных компаниях следует проводить испытания уровня 1, для проведения КК уровней 2 и 3 и исправления неисправностей должны быть приложены дополнительные усилия.
________________
В настоящем стандарте текст, ошибочно продублированный в тексте IEC/TS 62736:2016, приведен без дублирования.
Таблица 2 - План испытаний уровня 3 в дополнение к указанным в таблице 1
Испытание | Оценка | Возможное последующее действие |
Максимальная относительная глубина зондирования | См. 10.2; предпочтительны измерения в абсолютных величинах, как и в 7.1 МЭК 61391-2:2010 | Регулировка или техническое обслуживание |
Проверки системного и графического дисплеев | Испытания, перечисленные в настоящем стандарте | Регулировка или техническое обслуживание |
Оценка дисперсии и смещения при измерении расстояний | См. 10.4 и 7.4 МЭК 61391-1:2006 | Регулировка или техническое обслуживание |
Различимость деталей по контрасту (дополнительно) | 6.3.2.3 IEC/TS 61390:1996 [23] | Регулировка или техническое обслуживание |
Пространственное разрешение (дополнительно) | IEC/TS 62791 [15], а в боковых, осевых и высотных направлениях 3.12, 6.3.2 IEC/TS 61390:1996 [23], или в боковых и высотных направлениях в сочетании с IEC/TS 62558 [24] | Регулировка или техническое обслуживание |
Оценка программ КК | Анализ программ КК, проверка действенности мер, принятых для устранения проблем. Определение областей, в которых испытания в целях КК могут быть усовершенствованы | Корректировка процедур |
7 Оборудование и необходимые данные
7.1 Общие сведения
Процедуры испытаний, описанные в настоящем стандарте, следует проводить с использованием тканеимитирующих фантомов, электронного контрольно-измерительного оборудования и данных цифровых изображений, которые получены от ультразвукового сканера.
7.2 Фантомы
7.2.1 Фантомы для контроля качества уровня 2 и/или уровня 3
В приложении A приведены примеры геометрий как фантомов для испытаний однородности изображения и максимальной относительной глубины зондирования (см. рисунок A.1), так и более компактного и простого фантома, необходимого только для испытания однородности изображения (см. рисунок A.2). На рисунке A.3 приведен фантом для оценки всех трех параметров, а именно: однородность, максимальная относительная глубина зондирования, а также дисперсии и смещения при измерении расстояний. Подходящие фантомы для этих испытаний могут быть изготовлены с использованием, например, геля на водной основе, губки с открытыми порами или уретановых каучуков, имеющих микроскопические неоднородности, которые равномерно распределены по всему объему для получения желаемого уровня ослабления [19], [25], [26], [27], [28], [29], [30]. Фантомы без прочих источников обратного рассеяния включают в себя частицы, такие как стеклянные шарики диаметром 40 мкм, для обеспечения сигналов обратного рассеяния с регулируемой амплитудой [31], [32]. Некоторые изготовители могут производить тканеимитирующие материалы и фантомы, которые соответствуют техническим требованиям, приведенным в 7.2.2 и 7.2.3.
________________
К ним относятся, например, ATS Labs; Бриджпорт, штат Коннектикут, США (www.atslabs.com); CIRS, Норфолк, Вирджиния, США (Www.cirsinc.com); Gammex/RMI, Мидлтон, Wl, USA (www.gammex.com) и Киото Kagaku Co., Ltd, Киото, Япония (http://www.kyotokagaku.com). Эта информация приведена для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК этих изделий.
Примечание - Продукция перечисленных выше производителей в России отсутствует.
7.2.2 Фантомы только для контроля качества уровня 2
Указанные технические характеристики должны быть неизменными в диапазоне частот от 1 до 17 МГц, кроме тех случаев, которые отмечались ранее. Более жесткие требования для уровня 3 КК, отличные от испытаний однородности изображений, перечислены далее:
Скорость звука: | (1500±100) м·с Скорость звука для испытаний по измерению расстояний должна соответствовать техническим характеристикам испытаний уровня 3, приведенным ниже. | |||
Плотность: | (1,00±0,3) г·см | |||
Удельный коэффициент ослабления: | от 0,3 до 0,9 дБ·см | |||
Коэффициент обратного рассеяния: | (3·10 | |||
Поверхность сканирования: | поверхность сканирования должна обеспечивать акустический контакт всей активной области датчика с фантомом. | |||
Габаритные размеры: | фантом должен обеспечивать равномерное рассеивание и ослабление поля на глубине не менее 6 см. | |||
7.2.3 Фантомы для контроля качества уровней 2 и 3
Здесь используется понятие "максимальная относительная глубина зондирования", а не "максимальная глубина зондирования", как это определено в МЭК 61391-2, поскольку для КК не требуется проведение более дорогих и, возможно, менее надежных испытаний, которые необходимы в случае измерений абсолютных значений, определенных в МЭК 61391-2. Тем не менее измерения абсолютных значений, определенные в МЭК 61391-2, рекомендуется использовать для проведения сравнения текущих эксплуатационных характеристик системы пользователя с опубликованными значениями и значениями, полученными данным пользователем с этой же системой на других фантомах. Тканеимитирующий материал должен обладать свойствами, аналогичными тем, которые указаны в МЭК 61391-2, за исключением требований к акустическим свойствам фантома. При этом отсутствуют требования к стабильности при использовании одного и того же фантома в течение длительного периода КК или ряда фантомов, имеющих одинаковые свойства.
Требования к материалу фантома для КК уровня 3 на частоте от 1 до 17 МГц:
скорость звука (СЗ): (1540±20) м·с, с целью исключения существенных осложнений.
В том случае, когда скорость звука в фантоме отличается от установленной в ультразвуковой системе, фокус смещается и деградирует. Эти незначительные эффекты учтены при испытаниях КК. Тем не менее скорость звука имеет важное значение при проверках погрешностей измерения расстояния, за исключением случаев проведения развернутых испытаний эксплуатационных характеристик на уровне 3 или при КК. Для имитации СЗ 1540 м·с для каждой геометрии развертки ультразвуковой системы в фантом на соответствующих расстояниях включают нити, при этом оптимальной является СЗ (1500±80) м·с
при допустимой частоте 3 МГц. Этот разброс СЗ может быть использован с большой осторожностью, поскольку резиновые уретановые фантомы, как правило, являются долговечными при СЗ 1450 м·с
. Тем не менее для большинства ультразвуковых систем с установкой СЗ 1540 м·с
различные группы нитей в фантоме должны быть тщательно разнесены по глубине расположения, для того чтобы дать объективные результаты измерения расстояния для фазированных решеток и линейных решеток. Угол дуги при размещении нитей в фантоме должен соответствовать актуальной кривизне размещения криволинейных или фазированных решеток. Любое отклонение СЗ, установленной в системе, от СЗ в фантоме, отклонение от предполагаемого угла, или места нахождения нитей, или от предполагаемой кривизны линейной решетки приводит к ошибкам в боковом направлении измерения расстояния
. Другими словами, с использованием одного набора нитей невозможно обеспечить правильные боковые измерения расстояния для различных искривлений изогнутой линейной решетки, а также для криволинейных и линейных решеток. Сложности выполнения измерений в боковых/азимутальных и осевых направлениях не встречаются в ультразвуковых системах, имеющих регулировку скорости звука, которая может быть установлена равной СЗ в фантоме, где нити или другие мишени расположены на ожидаемом расстоянии. Оптимально иметь такое боковое расположение и радиусы кривизны дуг нитей, которые соответствуют значениям решеток, для которых они предназначены. Пользователи должны быть проинструктированы о том, что необходимо использовать группы нитей с кривизной, близкой (в пределах определенного допуска) к преобразователю, соответствие можно проконтролировать на изображении нитей.
________________
Боковое (латеральное) направление называется азимутальным с фазированными решетками.
Стабильность фантома
Изготовитель фантома должен обеспечивать сохранение его технических характеристик в течение не менее пяти лет. Гарантия может включать в себя восстановление, например с помощью замены раствора в случае склонности к высыханию, при этом должны быть указаны методы восстановления и затраты. Должен быть предусмотрен метод проверки стабильности технических характеристик фантома. В большинстве случаев достаточным является нанесение изготовителем маркировки массы фантома и временного интервала, через который следует проверять вес фантома. Когда фантом начинает высыхать, что характерно для фантомов на водной основе, или деградировать иным образом, при проведении процедур КК переходят к использованию нового фантома, при этом оба фантома должны иметь одинаковые акустические свойства. Если такой переход предпринят, необходимо отметить время его совершения.
Плотность: | (1,00±0,11) г·см |
Удельный коэффициент ослабления: | (0,7+0,2/-0,05) дБ·см |
Коэффициент обратного рассеяния: | (3·10 Значение коэффициента обратного рассеяния фантома и функцию частоты следует сообщать вместе с результатами испытаний, полученных на фантоме. |
Поверхность сканирования: | поверхность сканирования должна обеспечивать акустический контакт всей активной области датчика с фантомом. Рекомендовано наличие тонкого слоя воды для облегчения акустической связи. |
Геометрические размеры: | годный к использованию фантом должен иметь глубину по крайней мере 22 см для проверки максимальной относительной глубины зондирования на низких частотах (от 2,5 до 5 МГц). Боковые и вертикальные размеры должны быть такие, чтобы существовала область однородной ткани, по крайней мере, шириной 6 см и толщиной 6 см, имитирующая материал на расстоянии, соответствующем максимальной относительной глубине зондирования для испытуемого сканера и преобразователя. Для обеспечения испытания системы 3D-сканирования могут требоваться большие однородные поперечные сечения. |
Погрешность положения мишени: | нити или другие мишени для пространственных измерений должны стабильно располагаться в каждом испытательном объекте в пределах 0,1 мм от указанного места локализации (см. МЭК 61391-1:2006). |
7.3 Данные изображения
7.3.1 Данные цифрового изображения
Критерии испытаний уровня 3, описанные в настоящем стандарте, в частности испытания максимальной относительной глубины зондирования, лучше всего применять для данных цифрового изображения, полученных от ультразвукового сканера. Это требует сведений об уровнях яркости пикселей (в градациях серого) для всех пространственных локализаций в изображении. Данные оцифрованного изображения, как правило, находятся в матрице, состоящей из по меньшей мере 300300 пикселей, с глубиной 8 бит (255 уровней) в градациях серого. Рекомендуется использование в системе вычислений данных изображения с максимальным разрешением. Для получения более детальной оценки эксплуатационных характеристик, в частности для машин премиум-класса, многим пользователям необходимы средние радиочастотные и синфазно-квадратурные данные (данные РЧ и IQ). Как описано в приложении B, программное обеспечение предоставляется как на коммерческой основе, так и бесплатно, что упрощает получение данных, их запись, хранение и немедленный и долгосрочный анализ.
Сканеры, для которых применяется настоящий стандарт, могут быть сгруппированы в соответствии с источниками данных цифрового изображения. Первая группа включает в себя системы, для которых данные цифрового изображения непосредственно доступны со сканера или по сети передачи изображения. Источники данных цифрового изображения из этой группы включают в себя следующее:
a) изображения, полученные непосредственно со сканера в формате цифровых изображений и связи в медицине (DICOM) [33].
Данные изображения в формате DICOM доступны на большинстве сканеров. Программное обеспечение, способное к передаче и открытию изображений в формате DICOM, доступно на безвозмездной основе (http://rsbweb.nih.gov/ij/);
________________
Эта информация приведена для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК данного продукта.
b) другие файлы цифровых изображений, полученные непосредственно со сканера, в формате без потери качества (если такой формат доступен).
Этот метод используется большинством производителей сканеров для испытаний при КК и для развития методов обработки изображений. Многие типы файлов при сохранении достаточного разрешения являются приемлемыми для КК. Часто существуют возможности распространения данных для привлечения медицинского персонала, например с использованием ресурсов, работающих по протоколу передачи файлов FTP. В качестве альтернативы многие сканеры предоставляют файлы изображений на съемных носителях, таких как USB-флэш-накопители, магнитооптические диски, ZIP-диски или диски CD-ROM. Они также являются подходящими источниками данных цифрового изображения. Во многих системах доступен захват изображения всего экрана, иногда за счет хранения одного изображения, а не кинопетли.
Вторая группа включает в себя сканеры более простого устройства, которые непосредственно не предоставляют данные оцифрованного изображения, но обеспечивают стандартные видеосигналы, то есть данные изображения, которые могут быть загружены в компьютер, а затем проанализированы. В подобных сканерах для получения данных цифрового изображения могут быть использованы устройства видеозахвата кадров. Захват видеосигнала следует проводить в стабильных условиях для сведения к минимуму искажения сигнала. Необходимо обратить особое внимание на следующие аспекты:
- входной динамический диапазон устройства видеозахвата кадров должен быть скорректирован с целью охвата максимальной амплитуды исходного видеосигнала;
- динамический диапазон амплитуды сигнала в цифровой форме (определяется числом байт на пиксель) должен быть шире, чем динамический диапазон исходного видеосигнала в серой шкале. Минимум необходимо 8 бит или 256 уровней градаций серого;
- необходимо удостовериться, что функция преобразования сигнала является линейной;
- пространственное разрешение дисплея (определяется размером пикселя) для цифрового изображения должно быть не хуже разрешения исходного видеоизображения;
- частота захвата кадров устройства видеозахвата кадров должна быть достаточно высокой для обеспечения получения данных, меняющихся с той же скоростью, что и исходное изображение, если изображаемое поле перемещается. Необходимо учитывать разницу между частотой кадровой развертки и частотой кадров исходного видеосигнала;
- для исключения отражений в линиях необходимо использовать кабель соответствующего импеданса ввода/вывода;
- для испытаний дисплея сканера необходимы тестовые образцы изображения.
Наименее благоприятной является ситуация, когда экран ультразвуковой системы может быть сфотографирован в условиях низкой освещенности с повторением фотографических настроек и поля зрения, но это трудно контролировать.
7.3.2 Системы архивирования изображений
Многие центры визуализации используют коммерчески доступные системы передачи и архивации изображений (PACS, англ. Picture Archiving and Communication System) для просмотра и хранения данных ультразвукового изображения. Производители систем PACS обычно предоставляют рабочим станциям, имеющим соответствующие права доступа к изображениям, средства для получения изображений в минимально сжатом формате tiff (англ. Tagged Image File Format - формат хранения растровых графических изображений) или в несжатом формате, таком как исходный формат, или в формате DICOM.
Иногда возможна отправка из ультразвукового сканера видеофрагментов в сжатом формате. Если это возможно, видеофрагменты отправляются с минимальным сжатием. В том случае, когда соотношение коэффициент сжатия/качество поддерживается на постоянном уровне в течение долгого времени, испытания КК могут проводить со сжатыми видеофрагментами при условии постоянства всех системных параметров, влияющих на измерение таких параметров, как усиление, выходная мощность, очаговые зоны. Настоятельно рекомендуется применение данных настроек при всех испытаниях КК во всех аналогичных системах посредством использования предварительно задаваемых установок КК.
Наименее благоприятной является ситуация, когда экран ультразвуковой системы может быть сфотографирован в условиях низкой освещенности с повторением фотографических настроек и поля зрения, но это трудно контролировать.
7.4 Ожидания поставщиков систем
В некоторых решетках, таких как фазированные решетки и большинство 2D-решеток, клинические системы визуализации никогда не производят передачу или получение луча с апертурой из очень небольшого числа (N примерно от 1 до 10) последовательных элементов. Таким образом, потеря одного или нескольких элементов никогда не будет отображаться в однородном фантоме как существенная потеря сигнала в N линиях сканирования. Такое формирование луча и сканирование небольшого числа элементов обычно делается в ближнем поле фокусных зон линейных и изогнутых линейных решеток. Доступность нижеописанной тестовой последовательности импульсных сигналов должна быть ясно и четко описана (например, в алфавитном указателе и оглавлении) в руководстве по эксплуатации или в известных дополнениях к нему. Последовательность должна позволять проводить испытания каждого элемента преобразователя или небольшого числа элементов, выбранных для передачи и приема. В идеальном случае, если пять соседних элементов для передачи и приема объединяются в поперечном направлении, следующий элемент должен быть добавлен на одном конце апертуры и один элемент убран на другом конце апертуры, и так далее. В документации для каждой тестовой последовательности импульсов необходимо указать число элементов в каждой передающей апертуре и в каждой принимающей апертуре, а также порядок их изменения. Для 2D-решеток и других решеток, где формирование луча и сканирование с небольшим числом элементов в клинической практике не осуществляется, тестовая последовательность импульсов должна быть предусмотрена по крайней мере для небольших глубин, чтобы позволить проводить простые испытания КК для всех адресуемых групп или небольших блоков адресуемых групп преобразовательных элементов и каналов, как это предусмотрено в настоящем стандарте. Небольшой блок адресуемых групп может быть предоставлен для осуществления маскировки запатентованных составляющих методов адресации в преобразователе. Лучшая альтернатива - список необходимой статистики по ответам групп, которые должны быть согласованы группами пользователей и системными поставщиками. Они должны обязательно включать расположения выбросов без информации об общем числе или размере групп.
Проводимые изготовителем электрические испытания, для которых есть данные, показывающие хорошую корреляцию с испытаниями КК и дающие сведения об эксплуатационных характеристиках элементов как в целом, так и в виде схемы в зависимости от расположения элементов, могут быть использованы пользователем. Тем не менее испытания КК, описанные в настоящем стандарте, следует выполнять по крайней мере два раза в год, чтобы убедиться, что чувствительность представленных результатов испытаний адекватна.
Производители должны предоставлять тестовые шаблоны для дисплея системы, необходимые для испытания дисплея, описанного в 10.3, и в сроки, указанные в 10.3. Эти шаблоны должны быть легко доступны и использоваться конечным пользователем. Следует также предусмотреть возможность калибровки дисплея системы по отношению к функции стандартной индикации DICOM в градациях серого [33]. Оптимальная калибровка дисплея является важным фактором для отображения сигнала ультразвукового сканера, поскольку на практике этот дисплей используется для диагностической интерпретации.
Для соответствия требованиям настоящего стандарта производители должны представить описание с информацией для восстановления предварительно заданных настроек (ссылки на настройки со сложными наборами параметров), поскольку такие настройки зависят от обновления программного обеспечения. Должна обеспечиваться возможность быстрого восстановления таких настроек.
8 Методы испытаний уровня 1
См. 6.2 и [1] для получения дополнительной информации о тех испытаниях, которые следует выполнять по крайней мере ежемесячно, и их результаты, которые следует фиксировать. Необходимо проверить все оборудование, включая сканер, монитор, датчики и таблицы сканирования, и убедиться, что все механические компоненты нетронуты и все механические системы функциональны. Особое внимание следует обратить на силовые кабели, колеса, поддерживающие систему, воздушные фильтры и преобразователи. Необходимо проверить поверхность преобразователя на наличие повреждения объектива и расслаивания, корпуса на наличие трещин в качестве потенциального источника поражения электрическим током, а также изоляцию кабелей и уплотнителей на наличие износа. Параметры самых воспроизводимых позиций настраивают в соответствии с получением необходимых изображений.
Испытания изображения на однородность проводят с помощью визуальной оценки путем поиска вертикальных полос или других анормальностей в изображениях, аналогичных тем, которые подробно описаны в испытаниях уровня 2. Поверхность преобразователя очищают любым гелем или другим материалом. Параметры настраивают как на испытаниях уровня 2, за исключением увеличения коэффициента усиления таким образом, чтобы электронный шум был едва виден, если это возможно. Большинство серьезных клинически значимых дефектов элементов/каналов будут обнаружены визуально. Если коэффициент усиления в обычных условиях не может быть достаточно увеличен для отображения электронного шума, то это можно сделать в инженерных/сервисных настройках.
При хранении изображения в печатном виде необходимо убедиться, что изображения, представленные к интерпретации лечащим врачам, демонстрируют по существу те же отличительные особенности, что и дисплей ультразвуковой системы, и что дисплей ультразвуковой системы показывает то, что видно на напечатанной копии.
Ход испытания и его результаты должны быть записаны в журнал КК в бумажном или цифровом виде, действия должны быть своевременными.
9 Методы испытаний уровня 2
9.1 Механический осмотр
Как и в испытаниях уровня 1, необходимо проверить все оборудование, включая сканер, монитор, датчики и таблицы сканирования, и убедиться, что все механические компоненты нетронуты и все механические системы функциональны. Особое внимание следует обратить на силовые кабели, колеса, поддерживающие систему, воздушные фильтры и преобразователи. Необходимо проверить поверхность преобразователя на наличие повреждения объектива и расслаивания, корпус - на наличие трещин в качестве потенциального источника поражения электрическим током, а также изоляцию кабелей и уплотнителей на наличие износа.
9.2 Однородность изображения для элемента датчика и целостность канала
9.2.1 Общие сведения
Испытания изображения на однородность - это прежде всего испытания неэффективных элементов преобразователя или каналов передачи их сигнала. Результаты измерений будут зависеть от системы преобразователя, частоты, условий эксплуатации и режима. Они должны быть определены и повторяться для последовательных измерений при КК, которые могут быть повторены с целью обнаружения изменений, а также для обнаружения недопустимого изображения.
9.2.2 Процедуры аппаратного сканирования и настройки системы
Эти испытания предназначены для использования в режиме эхо-импульсной визуализации, но они при желании или необходимости могут быть адаптированы к допплеровскому и другим режимам для возможного повышения чувствительности. Используют фантом, который отвечает набору технических требований по 7.2. Преобразователь помещают в углубление, заполненное жидкостью, возможно также использование контактного геля или лосьона. Все решетки, в том числе выпуклые, должны быть связаны с фантомом по всей излучающей поверхности. В том случае, когда для большой решетки выпуклой формы испытания затруднительны, используется несколько представлений, которые вместе покрывают всю поверхность. Все испытания, за исключением измерений расстояний по вертикали, проводят с датчиком 3D/4D-режимов, включающим решетку 2D или механическое сканирование линейной решетки, который может работать в 2D-режиме с выпуклыми решетками или линейной решеткой, фиксированной в определенном положении. Таким образом, он может рассматриваться как линейная или выпуклая решетка. Конкретные параметры для других испытаний, таких как максимальная глубина зондирования, приведены в 10.2.2.
Испытания проводят с учетом следующего:
- для визуализации устанавливают кратчайшую фокальную зону из возможных, без пространственного компаундирования;
- отображаемый динамический диапазон устанавливают на относительно низком значении, для максимального контраста изображения рекомендуется примерно 50 дБ, что делает артефакты более заметными;
- глубину изображения устанавливают на наименьшем значении, которое возможно для всей поверхности преобразователя. Это может привести к уменьшению апертур приема и передачи и уменьшению размера пикселя изображения;
- следует избегать на изображении перекрытия поясняющих надписей;
- выходную мощность устанавливают на максимум, если это возможно, без насыщения пикселей изображения, а также увеличивают коэффициент усиления для максимизации уровня сигнала вблизи нулевой глубины, избегая при этом насыщения вблизи максимальных значений пикселей;
- отключают уменьшение зернистости (спеклов) и любые алгоритмы удаления артефактов (в частности, удаления теней), если это возможно;
- если не оговорено иное, при испытаниях такие параметры, как частота, должны иметь типичные значения, которые используют в клинической практике, предпочтительно при заданном уровне (параметры по умолчанию), представленном для системы в наиболее распространенных применениях и при наиболее стандартном габитусе тела для этой системы и преобразователя. Все значения для этих параметров должны быть записаны;
- в то время как для данных испытаний выбор характеристической кривой серой шкалы не очень важен, данные настройки должны быть восстанавливаемыми. Если это возможно, без необходимости измерения характеристической кривой, как описано в МЭК 62563-1 [34] и [35], характеристическая кривая серой шкалы дисплея должна быть установлена на ту, которая имеет только логарифмическое сжатие, динамический диапазон отображения 50 дБ и которая отображает значение пикселя изображения в зависимости от логарифмического уровня принимаемого сигнала прямой линией. Если эти параметры недоступны, выбранная характеристическая кривая и настройки динамического диапазона всегда должны быть одинаковыми;
- в качестве помощи и при необходимости поиска эти и другие параметры, влияющие на результаты КК, записывают на тот случай, если они могут быть сброшены или изменены другим оператором;
- при испытаниях КК на однородность и глубину зондирования все настройки должны быть записаны и сохранены в тестовых предустановленных файлах, чтобы обеспечить воспроизводимость практических испытаний с более сложными настройками. Многие из параметров записывают в том случае, когда сохраняется одно изображение, в отличие от кинопетли;
________________
В настоящем стандарте текст, ошибочно продублированный в тексте IEC/TS 62736:2016, приведен без дублирования.
- регулировка усиления сигнала по глубине зондирования TGC по возможности должна быть установлена в наиболее часто используемые и воспроизводимые значения. Наиболее используемые значения параметров рассматривают для равномерной яркости и глубины. Часто "наиболее воспроизводимой" является плоская TGC в любом крайнем максимальном, минимальном или среднем усилении;
- фазированные и 2D-решетки требуют от изготовителя системы специальных последовательностей изображений, как это указано в 7.4. С помощью этих решеток реализуют последовательность испытаний системы, представленную поставщиком системы, согласно предоставленным специальным инструкциям;
- параметры настройки обработки сигнала, такие как логарифмическое сжатие, уменьшение спеклов и другие функции предварительной обработки, а также параметры настройки показа изображения, такие как последующая обработка, должны иметь типичные значения, которые используют в клинической практике, как упомянуто выше, и регистрируют.
9.2.3 Получение изображений
Для получения последовательности испытательных данных требуется некоторая практика. Процедура получения изображений заключается в следующем:
- контактный гель плавно распределяется по пути сканирования;
- легким нажатием на датчик создается тонкий слой геля под преобразователем, с запасом геля перед преобразователем в направлении сканирования. Немного меньшее давление в направлении просмотра помогает преобразователю двигаться последовательно по тонкому слою геля;
- затем датчик медленно перемещается в направлении, перпендикулярном плоскости сканирования, от одного конца фантома к другому. Дополнительные независимые изображения могут быть получены путем наклона датчика относительно его линии контакта с фантомом. Выполняется разворот или разворот и наклон со скоростью, которая позволяет во время разворота получить почти полную кинопетлю изображений или 100 и более изображений;
- изображения записывают в то место, где они могут быть обработаны или извлечены для обработки;
- очищается путь сканирования, повторяется распределение геля и последовательность получения изображения для проверки стабильности результатов;
- повторяют получение изображений до тех пор, пока не будет получена стабильность результатов (МЭК 61391-2:2010);
- когда отсутствует возможность получения кинопетли, делают запись изображений максимально быстро, в то время как преобразователь медленно сканирует фантом.
9.2.4 Анализ
Для получения высокой чувствительности необходимо вычислить значение медианы изображения для всех изображений,
равно от 1 до N, в развороте и/или в развороте с наклоном, для каждого пикселя с координатами
,
. В результате на усредненном изображении должно быть выявлено уменьшение яркости изображения пикселей под ослабленными преобразовательными элементами или каналами. Для количественной оценки однородности изображения по яркости вычисляется медиана значений пикселей, на по меньшей мере 10% от глубины изображения, например от 2 до 20 мм в каждом луче в изображении, избегая шумных участков изображения. Для линейных решеток это означает простое усреднение значений пикселей изображения в колонке на глубине в диапазоне от 3 до 10 мм. Нарисованные линии на рисунке 1 (справа) добавлены с целью показать эту область осевого усреднения в уменьшенном диапазоне от 2 до 8 мм. Совокупность значений медианы в зависимости от числа пикселей вдоль поверхности преобразователя формирует боковой профиль, показанный на рисунке 1 (слева). Обработку выполняют с использованием любого программного обеспечения из множества доступных для данного типа задач. Задача может быть решена довольно легко в программном обеспечении общего назначения или в специальном программном обеспечении
.
________________
Например, Matlab или NIH ImageJ с помощью специальных плагинов (см. примеры коммерческого или свободного программного обеспечения в приложении В). Эта информация дана для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК этих продуктов.
Несколько узких снижений графика в области отдельных элементов или снижение в области группы элементов более чем на 6 дБ считают дефектами. Другой критерий, основанный на статистике профиля, приведен ниже. Три дефектных элемента или большее число дефектных элементов, хорошо отделенных друг от друга, как правило, допускается. При динамическом диапазоне 50 дБ и рациональном логарифмическом сжатии снижение, большее или равное 6 дБ, будет отображаться как снижение, большее или равное одной десятой полного диапазона уровней градаций серого, или 26 на шкале в 256 уровней градаций серого, как показано на рисунке 1. Для интерпретации этих данных необходимо приобретение некоторого опыта в ходе обучения. Эксплуатационные характеристики преобразователей с недопустимыми дефектами по этому критерию следует сопоставить с результатами испытаний поставщика услуг или с другими измерениями, такими как полная визуализация датчика или полное электрическое испытание элементов (см. приложение D). Другие особенности измерения с имеющимся специализированным программным обеспечением, в том числе получение профилей с выпуклыми линейными решетками, приведены в приложении B.
|
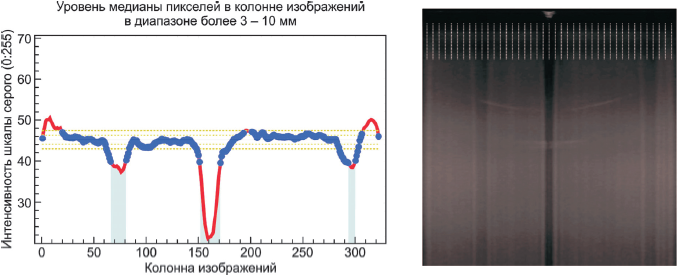
Рисунок 1 - Медианно-усредненное изображение (справа) и его боковой профиль (слева)
В правой части на рисунке 1 приведено медианно-усредненное изображение, полученное из большого стека изображений при помощи однородного фантома с перемешанной жидкостью; белыми вертикальными линиями в верхней части (на глубине от 3 до 10 мм) показан диапазон, в котором для сигнала каждой строки развертки рассчитывается медиана с целью получения профиля сигнала, приведенного слева на рисунке 1. Поперек центрального элемента для имитации двух дефектных элементов преобразователя помещена нить диаметром 0,53 мм. Эта нить отбрасывает главную тень на изображении. Этот эффект затенения материала, как правило, больше, чем при отсоединении элементов поверхности. Две меньшие тени видно там, где, вероятно, находятся менее чувствительные или утерянные отдельные элементы. В левой части рисунка 1 множество синих точек, наложенных на красную линию, составляет центральные три четверти (75%) данных профиля. Пунктирная зеленая (желтая) линия обозначает один (два) медианных абсолютных отклонения выше и ниже медианы профиля. Серые "тени" расположены (упрощенно) ниже сегмента данных, находящихся в нижней восьмой части (12,5%) из множества значений профиля.
Результаты этого анализа должны быть зарегистрированы в базе данных, включая, как минимум, изменение сигналов и их полуширины и расположение на решетке. Такая запись должна быть сделана для всех областей изменения скан-линии сигнала в изображении, в котором изменение превышает рекомендуемые нормы для испытанного типа преобразователя и системы. Кроме того, должны быть сделаны выводы из испытаний. Когда такие рекомендуемые пределы недоступны, не являются полностью удовлетворительными или когда это практически осуществимо в других случаях, база данных должна включать в себя медианно-усредненное изображение и профиль яркости, подобные изображенным на рисунке 1, а также средство построения результатов изменения в части сигналов амплитуды, ширины снижения и/или получения амплитуды и ширины снижения в зависимости от времени в контрольной диаграмме [36]. Контрольная диаграмма может помочь определить отклонения, превышающие два или три стандартных отклонения от среднего значения ранее записанных значений. Это типичные пороговые значения для признания четкой деградации, и обычно используются меры по исправлению положения (см. В.2 приложения В).
10 Методы испытаний уровня 3
10.1 Основные положения
Эти испытания обязательны для выполнения по крайней мере один раз в год с использованием фантомов, определенных в 7.2.3; результаты испытаний следует фиксировать. Они должны также быть выполнены после приемочных испытаний и при подозрении на проблемы, такие как системная чувствительность и эксплуатационные характеристики дисплея системы, при этом на испытаниях на однородность изображения явные проблемы не зарегистрированы. Как и в 9.2.4, результаты испытаний должны быть нанесены на контрольные диаграммы для выявления существенных отклонений от среднего значения измерений (см. В.2 приложения B).
10.2 Максимальная относительная глубина зондирования
10.2.1 Оценка
Определение максимальной глубины зондирования является лучшим методом визуализации из разработанных на момент разработки настоящего стандарта упрощенных методов испытаний чувствительности ультразвуковой системы. При этом определение максимальной относительной глубины зондирования является лучшим методом визуализации для оценки изменений чувствительности системы и требует исключительно стабильности фантома без узко определенных акустических свойств. Визуальное измерение глубины зондирования может быть непоследовательным по отношению к документу, описывающему незначительные изменения чувствительности системы и процедуры, разработанные для количественной оценки этой меры.
10.2.2 Настройка системы сканирования
Ниже приведена адаптированная с незначительными изменениями информация из 6.1.1 и 7.1 МЭК 61391-2:2010. Максимальную относительную глубину зондирования следует измерять на заданной частоте (по умолчанию) представленной системы для наиболее распространенного применения для этой системы и датчика и для любого другого датчика, чувствительность которого является проверяемой и ремонт которого после испытаний однородности изображения не запланирован. Для того чтобы определить максимальную относительную глубину зондирования, должны быть скорректированы настройки чувствительности системы для получения эхосигналов от фантома с как можно большей глубины. Эта регулировка обычно требует следующего:
a) для энергии передачи (обозначенной, например, как "выходная мощность"; "мощность" и т.д.) должно быть установлено самое высокое значение;
b) фокусное расстояние передачи должно быть расположено вблизи своего максимума, то есть как можно ближе к кажущейся максимальной относительной глубине зондирования;
c) общий коэффициент усиления системы и коэффициент усиления сигнала по глубине зондирования TGC должны иметь достаточно высокие значения, при которых отображается электронный шум на мониторе изображения или яркость некоторых пикселей в области измерения относительной глубины зондирования приближается к максимальной. В последнем случае отображенный динамический диапазон должен быть установлен в его максимально допустимом значении. В любом случае следует убедиться, что изображение пикселей не насыщенное или что реальный сигнал не отображается как ноль, т.е. искусственно высокий или низкий.
Параметры обработки сигнала, такие как логарифмическое сжатие и другие функции предварительной обработки, а также настройки отображения изображений, такие как постобработка, должны иметь значения, которые используют в клинической практике, предпочтительно при заданном уровне частот (по умолчанию) для наиболее распространенных применений для этой системы и датчика, а также для самого трудного габитуса тела. Если используют предустановки для предварительной настройки системы для предполагаемого клинического применения, а также контрольные установки, то их значения должны быть записаны.
Эти испытания выполняют в наиболее общем режиме, например в режиме выделения 2-й (тканевой) гармоники или в режиме основной гармоники. Последний режим в большинстве случаев лучше, если фантом не имеет достаточной глубины для обеспечения измерений. Если помехи от многократного рассеяния в фантоме увеличили измеренную глубину до нереалистичных отметок, попробуйте выбрать другой стандартный набор настроек или рассмотреть возможность того, что рассеивание в фантоме слишком сильное.
10.2.3 Получение изображений
Максимальная относительная глубина зондирования определяется из отношения сигнал-шум пикселей изображения к глубине. Кинопетля изображений получается при развороте нормали к плоскости изображения через относительную глубину зондирования фантома. Для этого сканер оптимизирован для достижения максимальных эксплуатационных характеристик [см. рисунок 2A)]. Такая оптимизация, как правило, приводит к фоновым эхосигналам от фантома, переходящих в электронный шум.
|
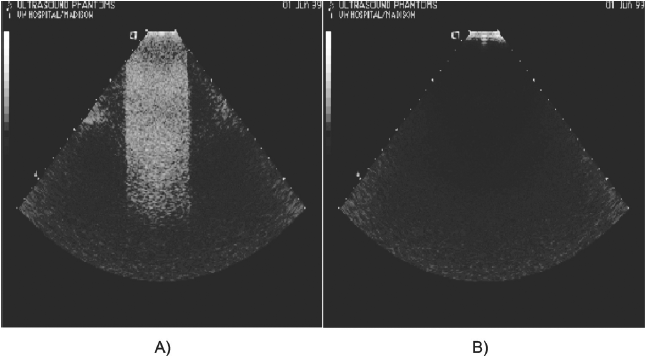
Рисунок 2 - A) изображение однородного сечения в тканеимитирующем фантоме, - яркий прямоугольник; B) изображение отображения только электронного шума, полученное с пульта управления с установками, такими же как для A), но с преобразователем, отсоединенным от фантома (источник: Университет штата Висконсин)
Кинопетля изображений должна быть получена от преобразователя, не соединенного с фантомом, при этом используются одни и те же параметры мощности, усиления и обработки. Последний набор изображений будет использоваться для вычисления зависящего от глубины уровня электронного шума для выбранных настроек обработки сигналов преобразователя, приемника и сканера. Это приведет к изображению "электронного шума", как показано на рисунке 2B). Высказано предположение, что механическая нагрузка на преобразователь при соединении датчика с фантомом может привести к различным уровням шумов, отличных от тех, когда датчик находится в воздухе. Необходимо иметь в виду, что это может произойти. Как для механических преобразователей, имеющих жидкостный путь к окну корпуса датчика, где реверберация в жидкостном пути может быть плохой, так и для новых систем и типов датчиков необходимо сравнить уровень шума при положении датчика в воздухе и при преобразователе, соединенном с фантомной нагрузкой, такой как блок мягкого каучука, который имеет такой же акустический импеданс, как фантом, но не эхогенен на глубинах, охватывающих максимальную относительную глубину зондирования в фантоме. Если уровень шума ниже в безэховом блоке, необходимо использовать измерения с подобными датчиками.
10.2.4 Анализ
Данные оцифрованного изображения для прямоугольной области интереса (ОИ), отходящей от ближнего поля к нижней части изображения, образуют матрицу ![]() , где
, где относится к колонке (положение по горизонтали) и
- к строке (положение по вертикали) этой матрицы. Необходимо получить полную кинопетлю независимых изображений, при этом каждое изображение, сканированное преобразователем по нормали к плоскости изображения по всей длине фантома, пронумеровано
. Тогда каждый воксель в 3D-матрице помечен
![]() . Среднее значение
. Среднее значение ![]() должно быть получено усреднением данных всех изображений. Среднее значение пикселя (уровень градаций серого)
должно быть получено усреднением данных всех изображений. Среднее значение пикселя (уровень градаций серого) в зависимости от глубины вычисляют путем усреднения значений пикселей, расположенных на одинаковой глубине от преобразователя. При использовании секторных датчиков, таких как фазированные решетки и изогнутые линейные решетки, может возникнуть необходимость применения более сложной ОИ при вычислении значений
, за исключением случая, когда ширина ОИ составляет менее одной десятой от ширины сектора на максимальной глубине. Аналогичным образом
должно быть определено как среднее значение пикселя (числовой уровень градаций серого) в зависимости от глубины для изображения, содержащего только шум.
Типичные графики и
в зависимости от глубины показаны на рисунке 3. Значения
постепенно приближаются к значениям
с увеличением глубины. Пусть
- это уровень эхосигнала, зависящего от глубины, то есть среднее значение эхосигнала в зависимости от глубины на изображении в отсутствии электронных помех. Если предположить, что сигнал и шум не коррелируют и что изображение, полученное в В-режиме, является отображением уровня эхосигнала, можно рассчитать среднее значение сигнала в зависимости от глубины для изображения с фантомом по формуле
![]() . (1)
. (1)
Таким образом, отношение сигнал-шум по глубине ,
![]() рассчитывают по формуле
рассчитывают по формуле
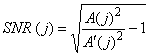 . (2)
. (2)
|
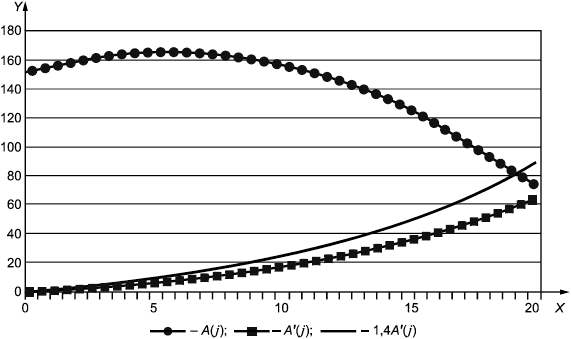
X - глубина в фантоме, см; Y - среднее значение пикселя изображения (данные). Сплошная линия представляет собой 1,4 , и она пересекает
на глубине 19 см, определяя максимальную относительную глубину зондирования
Рисунок 3 - Средние значения оцифрованных данных фантомного изображения и изображения шумов
в зависимости от глубины
Глубину, на которой отношение сигнал-шум уменьшается до 1, следует принимать в качестве максимальной относительной глубины зондирования или максимальной глубины зондирования, если испытания проводились с помощью калиброванного фантома. Это соответствует соотношению ![]() =1,4. Кроме того, для тех случаев, при которых
=1,4. Кроме того, для тех случаев, при которых не пропорционально уровню эхосигнала эха, величину
![]() =1,4 следует использовать в качестве практического критерия максимальной относительной глубины зондирования.
=1,4 следует использовать в качестве практического критерия максимальной относительной глубины зондирования.
Результаты этого непосредственного анализа максимальной относительной глубины зондирования должны быть зарегистрированы в базе данных, как указано в конце пункта 9.2.4 [36].
10.2.5 Комментарии
В отличие от стандартной оценки эксплуатационных характеристик согласно 7.1.3 МЭК 61391-2:2010, это измерение относительной глубины зондирования в мягком фантоме не может быть использовано для сравнения с эксплуатационными характеристиками в части получения изображений аналогичных систем, если испытания не выполняют на том же фантоме или фантом не отвечает техническим требованиям этого стандарта. Если максимальную относительную глубину зондирования измеряют на том же фантоме, то она может быть использована для оценки влияния модернизации системы, а в некоторых случаях помогает идентифицировать неисправные датчики, когда выводы о неисправности делаются по анализу потери чувствительности. Измерение максимальной относительной глубины зондирования может быть полезным во время приемочных испытаний только при сравнении с испытаниями перед покупкой, выполненными с тем же фантомом. Тем не менее иногда улучшение эксплуатационных характеристик на глубине зондирования сопровождается уменьшением бокового разрешения из-за преимущественного затухания высокочастотных компонент импульсно-ультразвуковых лучей в ткани и/или если в приемнике ультразвукового прибора используют фильтры нижних частот. Таким образом, максимальная относительная глубина зондирования показывает только один аспект эксплуатационных характеристик в части получения изображения, поскольку не дает никакой информации о пространственном и контрастном разрешении на рассмотренных глубинах. Таким образом, максимальную относительную глубину зондирования следует рассматривать в качестве простого, но ценного инструмента для оценки функции формирования изображений в "идеальном случае", когда только потеря сигнала или электронный шум ограничивают способность визуализации мишени.
Некоторые системы обработки изображений, в частности те, которые работают на более низких частотах, обеспечивают глубину формирования изображений, которая превышает доступную длину пути в большинстве фантомов. Когда дело обстоит именно так, можно только определить, что максимальная относительная глубина зондирования превышает максимальную длину пути, доступную в фантоме, и записать отношение сигнал-шум SNR в течение продолжительного времени в конкретной ОИ в поле изображения.
10.3 Системный дисплей
10.3.1 Общие сведения
Все тестовые шаблоны, приведенные ниже, подробно описаны в [35], а их эквиваленты в МЭК 62563-1 [34] доступны в виде цифровых изображений. Все оценки, описанные ниже, следует проводить чаще, чем указано в настоящем стандарте, если это рекомендовано изготовителями ультразвуковой (УЗ) системы и рабочего места по интерпретации ультразвуковых исследований (УЗИ). Для оценки эксплуатационных характеристик системного дисплея, в том числе для калибровки шкалы в градациях серого, целесообразно проведение полных испытаний, особенно для дисплеев без схемы стабилизации яркости.
10.3.2 Испытания уровня 1 для УЗ-системы и дисплея рабочего места по интерпретации УЗИ
Перед испытаниями дисплей должен быть очищен.
Механическая целостность дисплея должна быть оценена с помощью тщательного обследования таких явлений, как царапины, трещины, отметины от ручки и механической стабильности поддержки дисплея.
10.3.3 Уровни испытаний 2 и 3
Испытания контрастных передаточных характеристик, связанных с дисплеем, выполняют в рамках испытаний КК уровня 3, а для испытаний уровня 2 рекомендуется быстрый визуальный контроль (см. приложение B). Для визуальной оценки низкого контраста используют шаблон низкой контрастности TG18-CT [35] (см. рисунок C.1), испытания следует проводить при хорошей освещенности и в обычных или наихудших условиях, характерных для использования УЗ-системы. Последнее будет выявлять последствия плохих условий просмотра и, возможно, мотивировать к улучшению освещенности. Должны быть записаны номера строк/столбцов блоков с наименьшим контрастом, в которых оба изогнутых края круговых полушарий в центре могут быть обнаружены визуально.
Рекомендуется проверить дисплей на наличие дефектов пикселей (мертвые/застрявшие пиксели) и общую однородность дисплея. Сначала питание отключается для отведения статического электричества, затем производят перезапуск и просмотр тестовых изображений TG18-OOH10 и TG18-UN80 [35] (см. рисунок C.1). Обнаруженные неоднородности должны быть зафиксированы с помощью словесного описания с использованием таких слов, как "потерянные пикселы или большая неравномерность в рядах (1-4), колонка (1-4)" и посредством фотографической регистрации дефектов изображения с помощью цифрового фотоаппарата. В подразделе 7.2 МЭК 62563-1:2009 и [35] приведены технические характеристики для более полных оценок. Число дисфункциональных пикселей, являющееся приемлемым для медицинской диагностики, зависит от степени отвлечения внимания, вызванного дисфункцией, и является функцией размера пикселя по сравнению с размером изображения точки функции рассеяния.
Результаты этого непосредственного анализа должны быть зарегистрированы в базе данных, как указано в конце пункта 9.2.4 [36]. Эти тестовые шаблоны предназначены для мониторов, откалиброванных по стандарту DICOM. Большинство ультразвуковых систем используют для отображения кривую гаммы 2.2, которая, как правило, не предусматривает разрешения полного диапазона уровней градаций серого, соответствующего 8 битам. Данные тестовые шаблоны, как правило, показывают эти ограничения.
Следует запрашивать наличие этих или эквивалентных тестовых шаблонов для существующих УЗ-систем. Тестовые шаблоны должны быть определены для систем, выбранных более чем через два года после выпуска настоящего стандарта.
Как и с другими испытаниями КК в данном описании, эти и более полные испытания следует выполнять после принятия новых или восстановления УЗ-систем и в случае существенных изменений (более чем два стандартных отклонения от среднего значения предыдущих измерений), обнаруженных при испытаниях. В идеале, количественная оценка эксплуатационных характеристик дисплея должна быть выполнена в соответствии с МЭК 62563-1. Например, калибровка шкалы градаций серого должна быть обеспечена за счет измерений яркости на нескольких заданных цифровым образом уровнях при использовании калиброванного фотометра и выборки тестовых шаблонов TG18-LN [35].
Более насущной проблемой работающих с изображениями больших сервисов с рабочим местом для демонстрации изображений, отличным от дисплея УЗ-системы, является то, что интерфейс вывода цифровых изображений не предназначен для передачи того же изображения, которое представлено на УЗ-системе, на стандартную DICOM станцию. Очень важно, чтобы врач, интерпретирующий результаты исследования, видел на изображении те же самые особенности, что и лица, проводящие исследования. Необходима дальнейшая стандартизация в указанной области.
10.4 Измерения расстояний для механического сканирования расстояний
10.4.1 Общие сведения
Измерение расстояний применяется для выполнения испытаний уровня 3, а также, в случае необходимости, проведения испытаний уровня 2. В первоначальном испытании КК системы рекомендуется испытание измерения расстояний во всех направлениях.
Оценка эксплуатационных характеристик, связанных с измерением расстояний, в испытаниях КК уровня 2 имеет особое значение:
- когда имеется нестабильность измерения расстояния или подозревается его неточность;
- при измерении вертикального смещения в механически сканирующих линейных, изогнутых линейных и фазированных решетках;
- во многих системах интервенционного наведения;
- при измерении бокового смещения вне поле зрения реального времени;
- в механически сканирующих одинарных элементах, кольцевых элементах, 2D и подобных датчиках. Эти системы более подвержены неявным ошибкам, чем системы с отображаемым расстоянием, расчет которого основан только на использовании данных от современных цифровых часов и на расстоянии между элементами в решетке. В частности, когда измерение расстояния имеет решающее значение, как в акушерстве, погрешность измерения расстояния в механически сканируемых направлениях следует измерять ежегодно. В этих менее стабильных системах должна быть проверена погрешность измерений, а также равномерность шкалы расстояний. Если приемочные испытания или другие испытания не выполнялись, первые испытания КК системы должны включать в себя полный набор измерений расстояний и документирование всех результатов испытаний.
10.4.2 Настройки аппаратуры и системы сканирования
Для испытаний используют фантом, предназначенный для оценки погрешности измерения расстояний в боковых/высотных направлениях, описанный в МЭК 61391-1. Параметры системы могут быть те, которые используют для клинической визуализации, где измерения абсолютных значений имеют решающее значение, или настроенные, в частности для минимизации дисперсии и смещения при проведении этих испытаний. Последние используют относительно высокое значение контрастности динамического диапазона, например 60 дБ, TGC при воспроизводимых установках, показывающих отдаленные мишени с приблизительно равномерной яркостью, и коэффициент усиления или выходную мощность, чтобы показать мишени при умеренно низкой яркости.
10.4.3 Получение изображений
В фантоме, предназначенном для измерения расстояния, сканируют нити и другие мишени из окна, предназначенного для этой группы мишеней. Расстояние между наиболее крупными мишенями должно быть достаточно большим для проверки погрешности в пределах полного диапазона, для которого используют преобразователь. Если используют изображение линейки, то его необходимо сканировать так, как описано в 10.4.2. Для проведения испытания измерения расстояния в вертикальном направлении для 3D- или 4D-сканирующих головок или для линейной решетки с некоторой формой 3D-слежения необходимо выровнять блок датчика таким образом, чтобы каждая плоскость сканируемого изображения была параллельна нити или отметкам расстояний на линейке. Уточняют выравнивание, контролируя, что нити или отметки расстояний на линейке четко визуализируются и дают отраженный от данных мишеней сигнал максимальной мощности, которая может быть достигнута путем регулировки угла наклона блока датчика. Устанавливают коэффициент усиления таким образом, чтобы эти мишени были видны при выполнении 3D-сканирования, но не больше, чем это необходимо для дисплея. Убеждаются, что все мишени в 3D-поле зрения видны отчетливо и без перекрытия артефактами, выполняют сканирование и записывают результаты. Для измерения расстояния в поперечном и осевом направлениях выполняют сканирование с аналогичными измерениями в высотном направлении выравниванием и мерами предосторожности и выравнивают систему таким образом, чтобы плоскость изображения была перпендикулярна нитям или отметкам на линейке.
10.4.4 Анализ
Измеряют позиции нити или позиции отметок расстояний на линейке через каждый 1 см, обеспечивая по крайней мере четыре измерения. Расстояние между двумя наиболее удаленными позициями не должно отличаться от ожидаемых значений на большую величину, чем установлено в технических характеристиках изготовителя. При измерении расстояния вдоль оси преобразователя результаты измерений не должны отклоняться от ожидаемого значения более чем на 1 мм или 2%, в зависимости от того, что больше.
Результаты этого непосредственного анализа должны быть зарегистрированы в базе данных, как указано в конце пункта 9.2.4 [36].
Приложение A
(справочное)
Примеры фантомов для оценки однородности изображения и/или максимальной относительной глубины зондирования
Фантом для линейных решеток и изогнутых линейных решеток для испытаний однородности изображений, проведения дополнительных измерений относительной глубины зондирования приведен на рисунке A.1. Этот фантом представляет собой твердый блок уретана с однородным распределением рассеяния. Углубление шириной 9 см на вершине обеспечивает хороший контакт фантома с изогнутыми линейными решетками. Менее дорогой и более компактный фантом, вероятно из подобных материалов, за исключением сильного поглощения для избегания реверберации, показан на рисунке A.2. Показанные два круглых углубления предназначены для сканирования путем вращения преобразователя, а не линейным разворотом. Большие и малые углубления применяются для слабо и сильно изогнутых линейных решеток соответственно. Универсальный фантом показан на рисунке A.3, недорогой - на рисунке A.4.
Для более тщательных измерений с меньшей вероятностью возникновения проблем с акустическим контактом [3] можно применять рассеяние в постоянно перемешиваемой жидкости. В этом случае не требуется осуществлять движение датчика при сканировании. Датчик опускается в жидкость на минимальное расстояние, чтобы обеспечить хороший акустический контакт, и далее регистрируется кинопетля.
Два конусообразных окна сканирования расположены на противоположных сторонах; в совокупности эти два окна позволяют осуществить непосредственный контакт фантома с выпуклыми (криволинейными) решетками с любым радиусом кривизны (РК) от 3,5 до 6 см. Окно сканирования, которое вмещает датчики с РК от 2 до 6 см, на фотографии направлено вверх; окна имеют металлический вид, потому что они состоят из пластика и покрыты алюминиевой фольгой, которая передает УЗ-колебания, но подавляет высыхание тканеимитирующего материала фантома. Пробковые слои предназначены для предотвращения скольжения фантома на гладкой поверхности. Третье плоское окно сканирования, изображенное на боковой стороне фантома, предназначено для размещения преобразователей других форм, таких как линейные решетки и фазированные решетки.
Рисунок A.4 изображает однородный фантом из резинового материала, который достаточно гибкий для соответствия множеству форм преобразователей, но слишком гибкий для размещения внутри дистанционных точек калибровки или нитей, если к нижней и правой части фантома не прикреплены жесткие пластины с рифлением. Этот фантом будет служить лучше в случае увеличения его толщины.
|
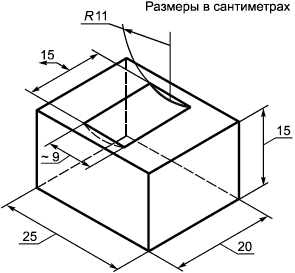
Рисунок A.1 - Пример фантома для испытаний однородности изображения и/или максимальной относительной глубины зондирования
|
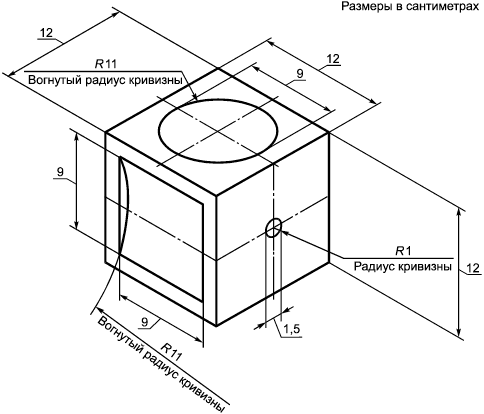
Рисунок A.2 - Пример компактного фантома для испытаний однородности изображения
|
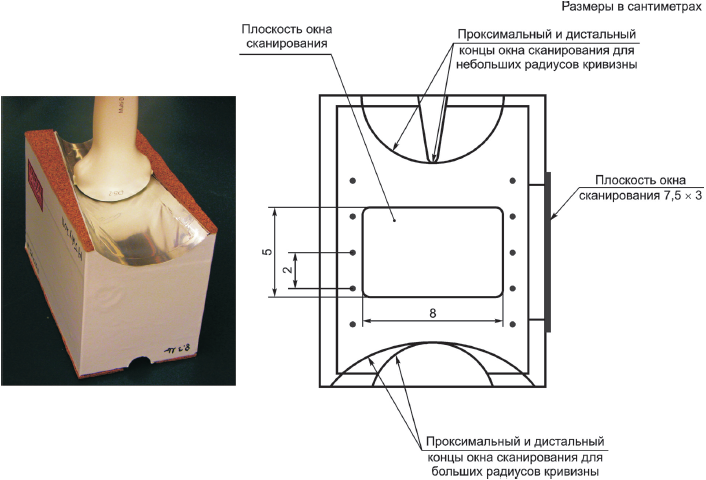
Рисунок A.3 - Фотография и рисунок фантома три-в-одном, который предусматривает измерения с целью определения погрешности и смещения при измерении расстояния, однородности изображения и глубины зондирования [37]
|
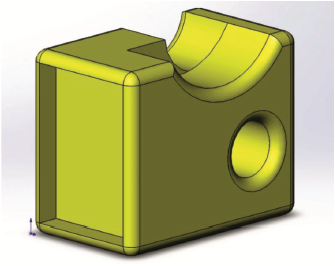
Рисунок А.4 - Компактный однородный фантом из относительно прочного резинового материала
Приложение B
(справочное)
Доступное программное обеспечение для анализа
B1 Программное обеспечение с открытым исходным кодом для КК однородности ультразвукового изображения
Ниже приведены примеры некоторых из известных программных средств, используемых в целях обеспечения качества (из [1]):
- UltralQ (Cablon Medical, Королевство Нидерландов).
________________
Эта информация приведена для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК данного продукта.
Эта компания разработала программное обеспечение для УЗ-систем, которое производит автоматизированную оценку и составляет отчеты в рамках испытаний уровней 2 и 3 (http://www.ultraiq.com); доступ от 29.6.2015;
- QA4US (Университет Радбауд, Неймеген, Королевство Нидерландов).
Модульный программный пакет, который может быть использован для проведения испытаний согласно уровням 2 и 3 (www.qa4us.eu); доступ от 26.6.2012;
- FirstCheck (UltraSound-Lab, ZMPBMT, Медицинский университет Вены, Австрия).
Программное обеспечение, созданное на основе Java и применяемое для поддержки простых пользовательских испытаний уровня 1 и их документирования. (http://www.zmpbmt.meduniwien.ac.at/1/science/ultrasound-lab/projects/firstcheck/); доступ от 30.6.2016;
- Ноттингем USQC (Клиника Ноттингемского университета, Медицинская физика и Клиническая инженерия, Великобритания).
Программное обеспечение, разработанное группой специалистов по ультразвуку для оценки результатов испытаний уровней 2 и 3.
Ниже описан один набор программного обеспечения. Данное описание приведено в качестве примера в части обновленных методик количественных измерений однородности изображения, а также для удобства пользователей настоящего стандарта. Эта многофункциональная программная платформа в ближайшее время будет доступна в качестве плагина к NIH ImageJ (бесплатно на http://rsbweb.nih.gov/ij/). Обрабатываются tiff-изображения и стеки несжатых данных DICOM, содержащие прямоугольные и дуговые участки сканирования. Медианно-усредненное изображение стека изображений создают с помощью одного плагина, данные анализируют с помощью плагина для линейной решетки или для выпуклой криволинейной решетки. Оператор изменяет положение и размер окна анализа ниже основного кольца датчика и на расстоянии около одной восьмой от общей глубины изображения. Для обнаружения любых изменений, которые требуют внимания, доступна функция изменения положения окна. Окно вывода результатов анализа показано на рисунке B.1.
Перед экспортом профиля в электронную таблицу определяют порог обнаружения дефектов. Данный порог должен быть стандартным значением для учреждения (рекомендуется отношение медианного абсолютного отклонения к медиане представленных данных, равное 3, 3 МАО). МАО при этом аналогично стандартному отклонению.
Перед тем как профиль экспортируется из плагина, необходимо задать число элементов преобразователя в исследуемой решетке (если значение неизвестно, то устанавливают значение 128). В результате рассчитывают нормированный сигнал ниже 3 МАО, интегрированный как по всем строкам в каждой области снижения сигнала, так и по столбцам шириной один элемент, как показано в таблице B.1. Ориентировочные пороги рекомендуется задавать способом, описанным ниже.
Следует считать дефектом снижение сигнала в области, соответствующей условию (столбец шириной один элемент)/среднее >0,4. Наличие более двух таких дефектов говорит о необходимости ремонта/замены или дальнейших испытаний. Нахождение нормированной области >0,9 в одной области снижения профиля неприемлемо и является поводом для ремонта/замены или дальнейших испытаний при значимом обосновании отсутствия дальнейших действий. Эти рекомендации еще предстоит проверить на большом числе датчиков, и в любом случае они могут быть предметом оценки отдельного учреждения в части важности дефекта в клинической практике. Снижение профиля более чем на 3 дБ (минус 3 дБ относительно среднего значения) и шириной более двух элементов следует считать дефектом и поводом для беспокойства. Если динамический диапазон дисплея не известен и не может быть оценен, в качестве руководства может быть использовано правило "Снижение сигнала в области (столбец шириной один элемент)/среднее >0,4". Это область снижения значений пикселей, интегрированных по числу колонок одного датчика шириной одного элемента, взятого на уровне -3 МАО. Этот критерий предполагает ввод правильного числа элементов преобразователя. Если это число неизвестно, то для высокопроизводительных систем 2016 года его можно принять равным (128+192)/2=160. Площадь этого снижения в значениях пикселей можно принять за определенное значение в децибелах при условии использования стандартной установки динамического диапазона и чисто логарифмической характеристической кривой. Это последнее допущение является наиболее точным для середины диапазона яркости изображения.
|
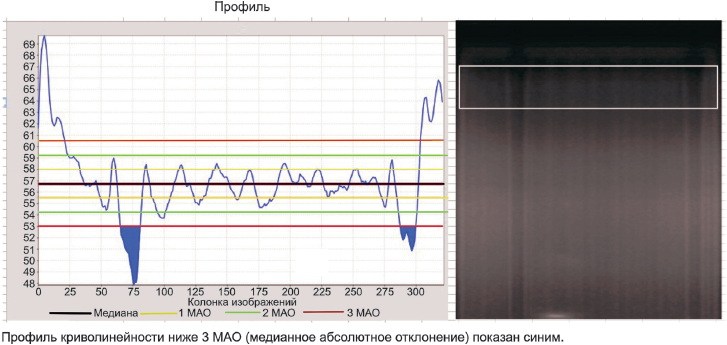
Рисунок B.1 - Слева - профиль медианного значения пикселя, построенный для каждого столбца изображения в поле анализа, показанного на медианно-усредненном изображении справа для преобразователя, изображенного на рисунке A.1, но без нейлоновой нити, используемой в качестве препятствия для некоторых центральных элементов
Таблица B.1 - Результат анализа
|
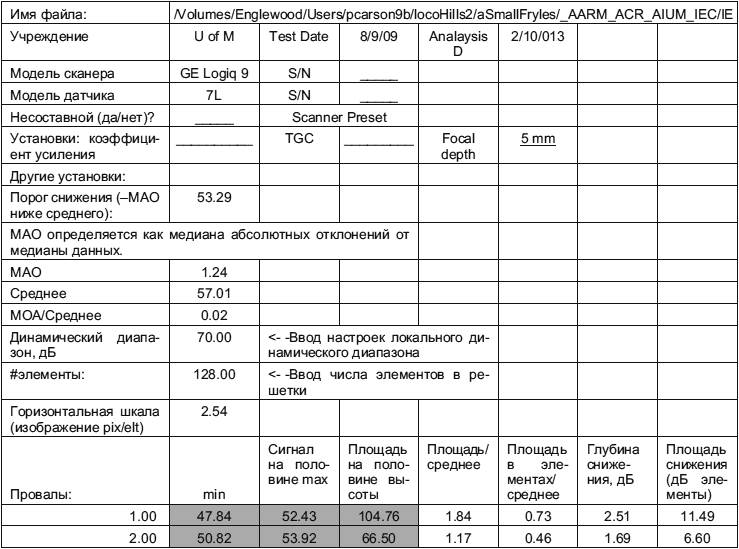
После изучения дефектов с помощью описанной процедуры и имеющихся методик количественных измерений, пользователь может исследовать незначительные дефекты для принятия решения о замене оборудования в случае вероятности дальнейшей деградации. В качестве альтернативы по контракту с сервисной службой может быть определен коэффициент замены преобразователей. Таким образом, при необходимости, наиболее неисправные датчики могут быть заменены пользователем без дополнительных затрат. Ниже приведен пример пошагового выполнения этого анализа.
Нижние два ряда содержат перечень и измеренные значения характеристик снижений сигнала. Минимальное значение сигнала и значение сигнала на половине от максимума определены в значениях пикселей. Площадь рассчитана интегрированием значений пикселей в точках снижения, под средним значением в поле "площадь/среднее" имеется в виду среднее значение пикселя в анализируемой области изображения. Глубина снижений, дБ, - это максимальная глубина, ее рассчитывают при допущении о чисто логарифмическом сжатии, в этом случае значение динамического диапазона равно 70 дБ. Площадь снижения (дБ элементы) - это просто проинтегрированная площадь снижения, дБ. Для приведения расстояния от каждого снижения до конца датчика, имеющего выпуклость или рифление, предназначенные для удобства ориентации при клиническом применении, должен быть добавлен еще один столбец. МАО определяется как медиана абсолютных отклонений от значения медианы данных. Эти листы могут быть рабочими листами в книге записей для конкретного датчика, сканера или объекта. Результаты для конкретного преобразователя в целях документирования и анализа изменений следует сохранять в колонке на отдельном сводном листе.
B.2 Пример диаграммы управления КК
Контрольная диаграмма может содержать результаты серии измерений, проведенных в течение времени. Доверительные или контрольные пределы или стандартные отклонения данных нанесены в виде горизонтальных линий, показывающих вероятность того, что точка отклоняется от среднего значения из-за других причин, нежели флуктуации данных, предположительно являющихся случайной Гауссовой погрешностью измерения. В примере на рисунке B.2 воспроизводимое внезапное увеличение площади снижения профиля указывает на деградацию датчика, кабеля или электроники, что требует ремонта, замены или дальнейшей диагностики. Снижение показано стабильным в течение нескольких месяцев в трех стандартных отклонениях от среднего значения, после чего произошел более серьезный дефект. Это очевидное изменение является более значимой причиной для беспокойства, чем небольшой стабильный дефект. Площадь снижения представлена как глубина снижения в децибелах, интегрированная по числу вовлеченных в снижение элементов преобразователя (см. таблицы из [36], построенные с изменениями).
Контрольная диаграмма: TD C9-4 S/N 319234
|
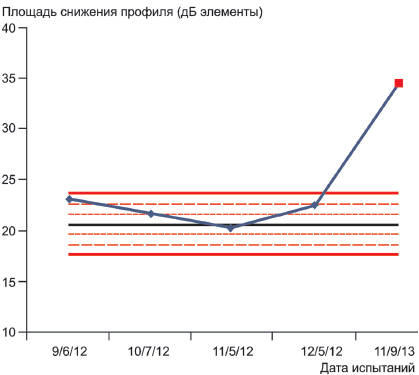
Рисунок B.2 - Контрольная диаграмма для снижения в середине профиля для одного датчика TD в режиме С9-4 с указанным серийным номером S/N
Приложение C
(справочное)
Тестовые шаблоны для дисплея
На рисунках C.1 и C.3 приведены два типа тестовых шаблонов для дисплеев. Данные шаблоны выбраны из-за их простоты для визуального и, при желании, фотометрического анализа. Рекомендуются оба тестовых шаблона, приведенные на рисунке C.1. Это простые узоры на темном и световом полях. Один из них показан с сеткой, а другой без сетки, которая нанесена для помощи в различимости участков пониженной или акцентированной яркости. Для упрощения ввода данных рекомендуется шаблон с сеткой, как на рисунке C.2 (слева). Важно, чтобы каждый шаблон заполнял весь экран. Оцените каждый шаблон с точки зрения явного обнаружения однородности, при взгляде с каждой стороны, сверху и снизу, а также прямо перед собой. В отличие от большинства моделей для шаблонов, изображенных на рисунках C.1 и C.3, отношение между пикселями изображения и пикселями дисплея один к одному не является существенным. Шаблоны в формате DICOM и 16-битном формате TIFF должны быть отображены в окне с уровнем градаций для покрытия диапазона от 0 до 4095 (WW=4096, WL=2048). Для 8-битовых шаблонов отображаемый диапазон должен быть от 0 до 255 (WW=256, WL=128).
|
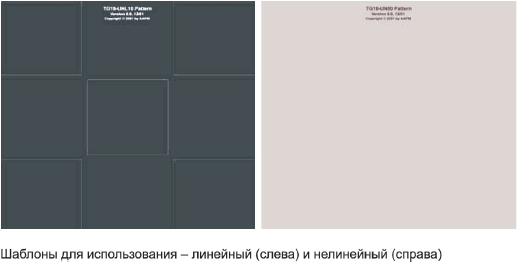
Рисунок C.1 - Шаблоны ААРМ TG18-ООН10 (слева) и TG18-UN80 (справа) для оценки однородности яркости, цвета и углов просмотра [35]
Для оценивания характеристик передачи контраста, связанных с ответом устройства по яркости, применяется тестовый шаблон низкого контраста [35], представленный на рисунке C.3. Шаблон включает в себя 16 смежных областей различной яркости с уровнями градаций от 8 до 248 для 8-битного дисплея и с 128 до 3968 для 12-битного дисплея. Каждая область отличается от смежных изменением значения пикселя на одну и ту же величину. Каждая группа содержит четыре небольших угловых участка с разностью значений пикселей от фона ±4 (±64 для 12 бит), идентичных тем, которые приведены в тестовом шаблоне TG18-QC. Кроме того, в центре каждой группы имеется двухсторонняя мишень в виде двух полукругов со значением разности пикселей от фона ±2 (±32). На рисунке C.2 (справа) показано, какая группа с самым низким контрастом, на которой можно различить центральные полукруги, в каждой строке является различимой. Для светодиодных дисплеев, возможно, более подходит аналогичный шаблон OIQ (см. МЭК 62563-1 [34]).
|
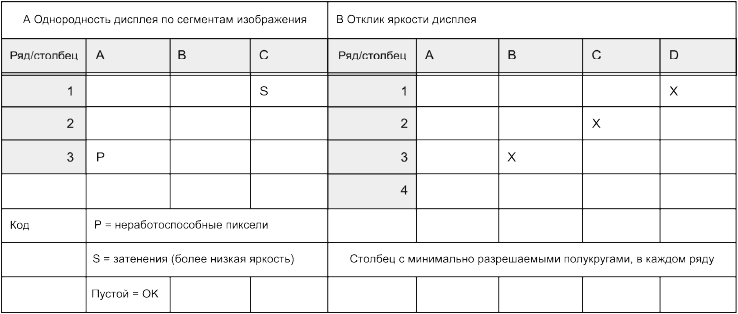
Рисунок C.2 - Пример формы ввода данных для визуальной оценки дисплея: слева - для рисунка C.1; справа - для рисунка C.3
|
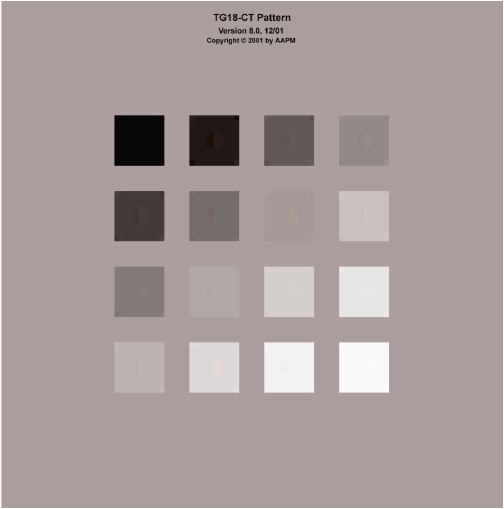
Рисунок C.3 - Низкоконтрастный тестовый шаблон TG18-СТ для оценки отклика яркости систем отображения [35]
Приложение D
(справочное)
Электронные методы испытаний и методы испытаний, представленные изготовителями, отношение к клинической значимости
В пункте 9.2.4 обсуждались два метода, в том числе электронные методы испытаний от независимых поставщиков и методы испытаний, представленные изготовителями. Авторы настоящего стандарта не присутствовали при испытаниях преобразователей, результаты которых для пользователей представили изготовители систем, это внутренние испытания. Устройство для всеобъемлющих электрических испытаний кабеля и элементов датчика (FirstCall aPerioTM) поступило в продажу, однако позже распространение устройства было ограничено. Система для визуализации поверхностных колебаний решетки преобразователя может в полной мере проверить возможности передачи импульсов даже для 2D-решетки, не требуя электрических соединений и сведений о соединении контактов и элементов решетки
.
________________
FirstCall aPerio
является торговой маркой продукта, поставляемого Unisyn Medical Technologies, Golden, CO, США. Эта информация приведена для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК данного продукта.
Aureon
является примером подходящего продукта в продаже (поставляемой Acertara Acoustic Laboratories, Лонгмонте, СО, США, http://www.acertaralabs.com/products/for-hospitals/aureon/~~HEAD=pobj). Эта информация приведена для удобства пользователей настоящего стандарта и не является свидетельством одобрения МЭК данного продукта.
Методы испытаний, описанные в настоящем стандарте, весьма чувствительны как для преобразовательного элемента, так и для определения сбоя в работе канала, однако их связь с качеством изображения на глубинах, которые в плоскости изображения представляют интерес, не полностью ясна. Этими испытаниями документально подтверждены профессиональные суждения, использующиеся для определения фактических пороговых значений при различных действиях по улучшению эксплуатационных характеристик системы после обнаружения дефектов и, возможно, для ее восстановления. При обнаружении сомнительных дефектов рекомендуются дальнейшие испытания эксплуатационных характеристик по существующим стандартам и техническим спецификациям (МЭК 61391-1, МЭК 61391-2 и IEC/TS 62791 [15] или IEC/TS 62558 [24]). Более конкретные методы оценки эксплуатационных характеристик в части формирования изображения могут помочь пролить свет на важность различных дефектов преобразователя по отношению к возможным затратам для замены или ремонта преобразователя. Полномасштабные клинические испытания систем с дефектными преобразователями и с надлежаще функционирующими преобразователями в различных клинических применениях экономически нецелесообразны. При этом может быть полезен метод испытаний, включающий использование смоделированного идеального наблюдателя и моделируемых артефактов изображения, с применением баз данных пограничных патологий и с возможностью регулирования контрастности и моделирования дефекта элемента/канала.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 60050-802:2011 | - | * |
IEC 61391-1:2006 | IDT | ГОСТ Р МЭК 61391-1-2011 "Оборудование медицинское ультразвуковое диагностическое. Часть 1. Общие требования к методикам калибровки систем измерения расстояний" |
IEC 61391-2:2010 | IDT | ГОСТ Р МЭК 61391-2-2012 "Государственная система обеспечения единства измерений. Оборудование медицинское ультразвуковое диагностическое. Общие требования к методикам измерения максимальной глубины зондирования и динамического диапазона" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | EFSUMB, "Guideline for technical quality assurance (TQA) of ultrasound devices (B-Mode) - Version 10" (Kollmann C., Dekorte C., Dudley N.J., Gritzmann N., Martin K., Evans D.H.) Ultraschall in der Medizin 33(6), p.544-549 (2012) |
[2] | Padilla F., Carson P.L., van der Spek S., LeCarpentier G., Goodsitt M.M. Toward a truly meaningful method of US-system quality control. In Proc. RSNA 96th Scientific Assembly and Annual Meeting, Radiology, 257, abstract only, Chicago, Nov. 28 - Dec. 3, 2010 |
[3] | King D.M., Hangiandreou N.J., Tradup D.J. and Stekel S.F. Evaluation of a low-cost liquid ultrasound test object for detection of transducer artifacts. Physics in Medicine and Biology 55(23), N557-N570 (2010) |
[4] | Hangiandreou N.J., Stekel S.F., Tradup D.J. Four Year Experience with an Ultrasound Quality Control Program, in Proc. Amer. Inst. Ultras. Med. Ann. Conv., J. Ultrasound Med., Suppl., 28 S1, S148-9, New York (2009) |
[5] | Hangiandreou N.J., Stekel S.F., Tradup D.J., Gorny K.R., King D.M., Four-year experience with a clinical ultrasound quality control program. Ultrasound Med. Biol. 37(8), p.1350-1357 (2011) |
[6] | King D.M., Hangiandreou N.J., Tradup D.J., Stekel S.F. Assessment of three methods for detection of ultrasound artifacts. Medical Physics 38(11), p.6216-6221 (2011) |
[7] |
|
[8] | Balbis S., Meloni Т., Tofani S., Zenone F., Nucera D., Guiot C., Criteria and scheduling of quality control of B-mode and doppler ultrasonography equipment. J. Clin. Ultrasound 40(3), p.167-173 (2012) |
[9] |
|
[10] |
|
[11] | Pfandzelter R., Sander G., Balhar T., Langer M., Technical quality assurance in diagnostic ultrasound in outpatient care in Germany, Technische Qualitдtssicherung der Ultraschalldiagnostik in der ambulanten Versorgung. Ultraschall in der Medizin 33(6), p.574-580 (2012) |
[12] | Shaw A. and Hekkenberg R., Standards to support performance evaluation for diagnostic ultrasound imaging equipment. National Physical Laboratory. NPL Report AC 2. Teddington, UK, 2007. 68 p |
[13] | AAPM. Real-time B-mode ultrasound quality control test procedures, Report of AAPM Ultrasound Task Group No.1, (M.M. Goodsitt, P.L. Carson, D.L. Hykes, J.M. Kofler), Med. Phys. 25 (8) 08-1998 |
[14] | IPEM. Routine quality assurance of ultrasound imaging systems, (R. Price), Institute for Physics and Engineering in Medicine, Report 71, 2002 (originally published by Institute for Physical Sciences in Medicine, 1995) |
[15] | IEC/TS 62791, Ultrasonics - Pulse-echo scanners - Low-echo sphere phantoms and method for performance testing of gray-scale medical ultrasound scanners applicable to a broad range of transducer types |
[16] | Shi H., Al-Sadah J., Mackie Т., Zagzebski J., Signal to noise ratio estimates of ultrasound depth of penetration. Med. Phys. 30(6), p.1367-1367 (2003) (Abstract) |
[17] | Madsen E.L., Frank G.R., McCormick M.M., Deaner M.E., Stiles T.A. Anechoic sphere phantoms for estimating 3-D resolution of very-high-frequency ultrasound scanners. IEEE Trans. Ultrason., Ferroelect., Freq. Control 57, p.2284-2292 (2010) |
[18] | Leys, С et al. Detecting outliers: Do not use standard deviation around the mean, use absolute deviation around the median. J. Exp. Soc. Psychol. 49, p.764-766 (2013) |
[19] | AIUM. Standard Methods for Measuring Performance of Pulse-Echo Ultrasound Imaging Equipment. American Institute of Ultrasound in Medicine. Laurel, MD, USA (1990) |
[20] | Goodsitt M., Carson P.L., Witt S., Hykes D.I., and Kofler J.M. Real Time B-mode Ultrasound Quality Control Test Procedures. Med. Phys. 25, p.1385-1406 (1998) |
[21] |
|
[22] | Ultrasound Accreditation Program Requirements, Amer. Col. Radiol., http://www.acraccreditation.org/~/media/Documents/Ultrasound/Requirements.pdf?la= en, Rev. 5/2/16 |
[23] | IEC/TS 61390:1996, Ultrasonics - Real-time pulse-echo systems - Test procedures to determine performance specifications |
[24] | IEC/TS 62558, Ultrasonics - Real-time pulse-echo scanners - Phantom with cylindrical, artificial cysts in tissue-mimicking material and method for evaluation and periodic testing of 3D-distributions of void-detectability ratio (VDR) |
[25] | Gorny K.R., Tradup D.J., Hangiandreou N.J. Implementation and validation of three automated methods for measuring ultrasound maximum depth of penetration: application to ultrasound quality control. Med. Phys. 32(8), p.2615-2628 (2005) |
[26] | Tradup D., Johnson L., Stekel S., Hangiandreou N. Initial experience with an automated system for measuring ultrasound image quality. J. Ultrasound Med. 26: S230, (2007) March, (Abstract) |
[27] | Gibson N., Dudle N., Griffith, K. A computerised quality control testing system for B-mode ultrasound. Ultrasound Med. Biol. 27, p.1697-1711 (2001) |
[28] | Tissue Substitutes, Phantoms and Computational Modelling in Medical Ultrasound. International Commission on Radiation Units and Measurements. ICRU Report 61. Bethesda, MD, USA (1998) |
[29] | Madsen E., Zagzebski J., Banjavic R. and Jutila R. Tissue-mimicking materials for ultrasound phantoms. Med. Phys. 5, p.391-394 (1978) |
[30] | Madsen E. Ultrasonically soft-tissue-mimicking materials. In The Medical Physics of CT and Ultrasound: Tissue Imaging and Characterization, Fullerton G. and Zagzebski J., editors, AAPM Monograph 6, American Association of Physicists in Medicine, New York, NY, USA. p.531-550 (1980) |
[31] | Madsen E.L., Frank G.R., Dong F. Liquid or solid ultrasonically tissue-mimicking materials with very low scatter. Ultrasound Med. Biol. 24(4), p.535-542 (1998) |
[32] | Wilson Т., Zagzebski J., Li Y.D. A test phantom for estimating changes in the effective frequency of an ultrasonic scanner. J. Ultrasound Med. 21(9), p.937-945 (2002) |
[33] | DICOM Standards Committee WG, Ultrasound, Digital Imaging and Communications in Medicine (DICOM) Supplement 43: Storage of 3D Ultrasound Images, Apr 10. 2009, (DICOM), Digital Imaging and Communications ftp://medical.nema.org/medical/dicom/final/sup43_ft.pdf. In Medicine |
[34] | IEC 62563-1, Medical electrical equipment - Medical image display systems - Part 1: Evaluation methods |
[35] | AAPM Task Group 18 Imaging Informatics Subcommittee, E. Samei, Chair, Assessment of Display Performance for Medical Imaging Systems, AAPM On-Line Report No. 03, College Park, MD., 2005. http://www.aapm.org/pubs/reports/OR_03.pdf |
[36] | Tague, N.R. Seven Basic Quality Tools. In The Quality Toolbox. American Society for Quality, Milwaukee, Wisconsin, USA. (2005) p.15. (Includes example control chart in Excel.) |
[37] | AIUM. Quality Assurance Manual for Gray Scale Ultrasound Scanners. AIUM Technical Standards Committee, American Institute of Ultrasound in Medicine, Laurel, MD, USA p.58-68 (2014) |
УДК 616-079 | ОКС 11.040.55 |
Ключевые слова: эхо-импульсный сканер, изображение, ультразвук, медицинское изделие, испытания, контроль качества, фантом, уровни испытаний, дефекты, шаблон | |
Электронный текст документа
и сверен по:
, 2017
{kind=link}