ГОСТ Р 57919-2017
(ИСО 6721-6:1996)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Пластмассы
ОПРЕДЕЛЕНИЕ МЕХАНИЧЕСКИХ СВОЙСТВ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ
Часть 6
Колебания при сдвиге. Нерезонансный метод
Plastics. Determination of dynamic mechanical properties. Part 6. Shear vibration. Non-resonance method
ОКС 83.080.01
Дата введения 2018-06-01
Предисловие
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией "Центр нормирования, стандартизации и классификации композитов" при участии Объединения юридических лиц "Союз производителей композитов" на основе официального перевода на русский язык англоязычной версии указанного в пункте 4 стандарта, который выполнен ТК 497
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 497 "Композиты, конструкции и изделия из них"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 ноября 2017 г. N 1683-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 6721-6:1996* "Пластмассы. Определение механических свойств при динамическом нагружении. Часть 6. Колебания при сдвиге. Нерезонансный метод" (ISO 6721-6:1996 "Plastics - Determination of dynamic mechanical properties - Part 6: Shear vibration - Non-resonance method", MOD), включая техническую поправку Amd.1:2007. При этом в него не включен раздел 11 примененного международного стандарта, который нецелесообразно применять в связи с тем, что он носит справочный характер.
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Указанный раздел, не включенный в основную часть настоящего стандарта, приведен в дополнительном приложении ДА.
Дополнительная ссылка, включенная в текст стандарта для учета потребностей национальной экономики Российской Федерации и/или особенностей российской национальной стандартизации, выделена курсивом*.
________________
* В оригинале обозначения и номера стандартов и нормативных документов приводятся обычным шрифтом, кроме раздела 3 "Термины и определения" и документов, отмеченных в разделах "Предисловие" и 2 "Нормативные ссылки" знаком "**". - .
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта приведено в дополнительном приложении ДБ.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта ИСО для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
В настоящем стандарте ссылки на международные стандарты заменены ссылками на соответствующие национальные стандарты. Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДВ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации"**. Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает метод вынужденных нерезонансных колебаний при сдвиге пластмасс при частотах, как правило, лежащих в диапазоне от 0,01 до 100 Гц. Метод подходит для измерения динамического модуля упругости в диапазоне от 0,1 до 50 МПа. Несмотря на то, что материалы с модулем более 50 МПа также можно исследовать с помощью настоящего метода, наиболее точные измерения их динамических свойств можно получить, используя колебания кручения согласно ГОСТ Р 56745 и ГОСТ Р 56802.
Данный метод наиболее подходит для измерения тангенса угла механических потерь более 0,1, поэтому его удобно использовать для изучения зависимости динамических свойств от температуры и частоты почти всей области стеклования согласно ГОСТ Р 56801-2015 (подраздел 9.4). Данные, полученные в широком диапазоне частот и температур, позволят, используя принцип температурно-временной суперпозиции, строить обобщенные графики, демонстрирующие динамические свойства на расширенном частотном диапазоне при различных температурах.
Примечание - Измерения в настоящем методе можно проводить и при более высоких частотах, однако это может вызвать значительные ошибки при определении динамических свойств согласно 10.1.2 и 10.1.3.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*:
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ГОСТ 32794-2014** Композиты полимерные. Термины и определения
ГОСТ Р 56745-2015 (ИСО 6721-2:2008) Пластмассы. Определение механических свойств при динамическом нагружении. Часть 2. Метод крутильного маятника
ГОСТ Р 56801-2015 (ИСО 6721-1:2008) Пластмассы. Определение механических свойств при динамическом нагружении. Часть 1. Общие принципы
ГОСТ Р 56802-2015 (ИСО 6721-7:1996) Пластмассы. Определение механических свойств при динамическом нагружении. Часть 7. Крутильные колебания. Нерезонансный метод
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 32794 и ГОСТ Р 56801.
4 Сущность метода
Испытуемые образцы подвергают синусоидальному сдвиговому нагружению или деформации при частоте существенно ниже собственной резонансной частоты колебаний при сдвиге. Измеряют амплитуды циклической нагрузки и смещения, а также фазовый угол между ними. Динамический модуль упругости при сдвиге и модуль потерь вычисляют по формулам, приведенным в разделе 10.
5 Оборудование
5.1 Устройство нагружения
5.1.1 Оборудование должно обеспечивать измерение амплитуд нагрузки и смещения, а также фазового угла между ними для образцов, к которым приложена сдвиговая синусоидальная нагрузка или деформация. Допускается использовать различные конструкции устройства нагружения, например, согласно схеме, представленной на рисунке 1. Два одинаковых испытуемых образца приклеивают к металлическим накладкам
и
. Синусоидальную нагрузку, создаваемую вибратором
, передают двум внешним накладкам
через зажим
. Амплитуду и частоту перемещения вибрационного стола изменяют и контролируют с помощью датчика
. Накладку
зажимают по центру зажимом
, таким образом к каждому образцу
прикладывают деформации чистого сдвига одинаковой величины. Синусоидальное нагружение, деформирующее испытуемые образцы, контролируют датчиком силы
, соединенным с
. Элементы между зажимами
и вибратором
, а также между
и
должны быть существенно жестче испытуемых образцов и обладать низким коэффициентом теплопроводности, если образцы помещают в камеру с регулируемой температурой.
|

- датчик силы;
,
- зажимы;
- образцы для испытания;
,
- металлические накладки;
- датчик смещения;
- вибратор
Рисунок 1 - Возможная схема устройства нагружения для определения динамических модулей при сдвиге
Примечание - Несмотря на то что каждый элемент устройства нагружения может быть существенно более жестким, чем испытуемые образцы, наличие зажимных или болтовых соединений может существенно увеличить податливость всей системы. В таком случае может потребоваться учет поправки на податливости* согласно 10.1.4.
________________
* Текст документа соответствует оригиналу. - .
Допускается применять другие схемы устройства нагружения, например, деформация чистого сдвига может быть приложена к одному образцу. В таком случае должны быть приняты меры, исключающие влияние любого изгибающего момента, возникающего при нагружении образца, на измерение динамического нагружения или смещения при сдвиге.
Также допускается осуществлять измерение деформации образцов путем размещения датчика смещения таким образом, чтобы измерялось относительное перемещение зажимов и
нагружающего приспособления. Величина поправки податливости в таком случае будет незначительной или пренебрежимо малой (см. 10.1.4).
5.1.2 Зажимы устройства нагружения должны обеспечивать фиксацию образцов с достаточным усилием для предотвращения относительного смещения металлических накладок и
и нагружающих зажимов и осуществлять сохранение прикладываемой нагрузки при испытании в условиях низких температур.
Любое отклонение оси нагружения по отношению к датчику силы во время нагружения образцов приведет к появлению на датчике поперечной составляющей силы. Выравнивание устройства нагружения и испытуемых образцов должно быть таким, чтобы поперечная составляющая силы, воздействующая на датчик, была менее 1% прикладываемой в продольном направлении силы.
5.1.3 Датчики - устройство или устройства, способные измерять прикладываемые значения амплитуд циклической нагрузки или смещения, или отношение значений этих величин в зависимости от времени. Калибровку датчиков выполняют в соответствии с национальными стандартами на методы измерения силы и длины. Для определения механических свойств при динамическом нагружении калибровку проводят с точностью ±2% от минимальных значений амплитуд циклической нагрузки и смещения, прикладываемых к образцу.
5.2 Цифровые средства обработки данных
Цифровые средства обработки данных должны регистрировать значения амплитуд циклической нагрузки и смещения с точностью ±1%, фазового угла между циклической нагрузкой и смещением с точностью ±0,1° и частоты с точностью ±10%.
5.3 Устройства для измерения и регулировки температуры
Устройства для измерения и регулировки температуры - по ГОСТ Р 56801 (подразделы 5.3 и 5.5).
5.4 Устройства для измерения размеров образцов для испытаний
Устройства для измерения размеров образцов - по ГОСТ Р 56801 (подраздел 5.6).
6 Образцы для испытания
6.1 Форма и размеры
Образцы - по ГОСТ Р 56801 (раздел 6).
Эскиз образцов с приклеенными накладками представлен на рисунке 2.
|
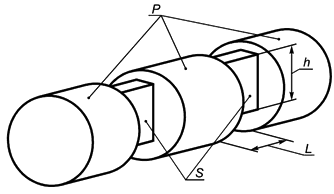
- образцы для испытания;
- металлические накладки;
- высота образцов;
- ширина образцов
Рисунок 2 - Эскиз образцов с приклеенными накладками
В данной конструкции металлические накладки представлены в форме цилиндра; допускается использовать накладки любой формы поперечного сечения, если их можно жестко зафиксировать в процессе нагружения на сдвиг. Размеры накладок
и образцов
должны быть выбраны таким образом, чтобы деформация накладок при нагружении была пренебрежимо мала по сравнению с деформацией образцов. Для пластмасс с модулем сдвига менее 100 МПа толщина накладок должна быть сопоставима с толщиной образцов
.
Форма поперечного сечения образцов в плане (относительно склеиваемой поверхности) не является критичной, однако рекомендуется использовать образцы прямоугольного сечения для упрощения применения выражения, учитывающего вклад изгибной деформации в общую деформацию образца (см. формулу (1)).
Образцы могут быть вырезаны из листа пластмасс. Размеры каждого образца не должны отличаться более чем на 3% от среднего значения соответствующих размеров всех испытуемых образцов. Размеры образцов должны быть достаточно большими для достижения корректной точности в определении динамической деформации и, следовательно, динамического модуля согласно 10.1. Рекомендуется, чтобы размер образца в направлении прикладываемой нагрузки был более 4
, для того чтобы вклад изгибной деформации был пренебрежимо малым.
Примечание - Образцы разной толщины, изготовленные методом литья под давлением, могут иметь различные динамические свойства из-за различий в структуре полимера в каждом образце.
6.2 Подготовка образцов
Подготовка образцов - по ГОСТ Р 56801 (подраздел 6.2).
7 Количество образцов
Количество образцов - по ГОСТ Р 56801 (раздел 7); следует учесть, что в настоящем стандарте испытывается одновременно два образца (см. рисунок 3), что эквивалентно одному образцу по ГОСТ Р 56801.
8 Кондиционирование образцов
Кондиционирование образцов - по ГОСТ Р 56801 (раздел 8).
9 Проведение испытания
9.1 Атмосфера испытания
Атмосфера испытаний - по ГОСТ Р 56801 (подраздел 9.1).
9.2 Измерение размеров поперечного сечения образцов
Измерение размеров поперечного сечения образцов - по ГОСТ Р 56801-2015 (подраздел 9.2).
9.3 Крепление образца
Образцы с приклеенными накладками устанавливают в зажимах с таким усилием затяжки, чтобы предотвратить относительное смещение между каждым зажимом и соответствующей накладкой.
9.4 Изменение температуры
Изменение температуры - по ГОСТ Р 56801 (подраздел 9.4).
9.5 Проведение испытания
Посредством вибратора к образцам с накладками (см. рисунок 3) прикладывают динамическую нагрузку, в результате чего получают амплитуды сигналов по нагрузке и смещению на образце, которые измеряют с точностью, установленной согласно 5.1.3.
Примечание - Если максимум деформации образцов превышает предел области линейных вязкоупругих свойств, тогда получаемые динамические свойства будут зависеть от величины прикладываемой деформации. Предельная деформация зависит от состава полимера и температуры и обычно составляет около 0,2% для стеклообразных пластмасс. Диапазон динамической деформации в области линейных вязкоупругих свойств может быть получен путем изменения амплитуды динамического смещения при постоянной частоте и записи любого изменения динамической жесткости от амплитуды деформации. Для этой цели следует использовать низкие частоты, чтобы минимизировать любой рост температуры, вызванный механическими потерями. Если на исследуемом участке деформации наблюдается нелинейная зависимость, то в протокол заносят предельное значение динамической деформации на линейном участке.
В процессе испытания регистрируют сигналы амплитуд и частот нагружения и смещения, фазовый угол между ними, а также температуру испытания. При проведении измерений в диапазонах частот и температур рекомендуется сначала установить наименьшую температуру и провести измерения с увеличением частоты при постоянной температуре. Затем провести измерения в том же диапазоне частот при следующем большем значении температуры согласно ГОСТ Р 56801-2015 (подраздел 9.4).
В условиях испытаний, при которых полимер демонстрирует средние или высокие механические потери (например, в области перехода стеклования), рассеиваемая полимером энергия может привести к росту его температуры, достаточной для значительного изменения динамических свойств. Рост температуры резко увеличивается с увеличением амплитуды смещения и частоты. Если цифровые устройства обработки данных способны анализировать сигналы датчика в течение первых нескольких циклов, то влияние любого роста температуры будет минимизировано. Последующие измерения будут изменяться с течением времени, поскольку будет продолжаться рост температуры образцов, что указывает на необходимость уделять повышенное внимание интерпретации результатов.
10 Обработка результатов
10.1 Расчет динамического модуля упругости при сдвиге
10.1.1 Общие положения
Приближенное значение динамического модуля упругости при сдвиге , Па, вычисляют по формуле
 , (1)
, (1)
где - измеренное значение амплитуды динамической нагрузки, Н;
- измеренное значение амплитуды динамического смещения, м;
- среднее значение ширины образца (расстояние между склеиваемыми поверхностями для одного образца), м;
- площадь поверхности образца, приклеиваемой к накладке, м
;
- среднее значение высоты образца (в направлении прикладываемой нагрузки), м;
- скорректированный модуль упругости при сдвиге, Па;
- скорректированный модуль упругости при изгибе, Па;
- измеренное значение фазового угла между амплитудами циклической нагрузки и смещения, градусы;
- измеренное значение величины комплексной жесткости образца, Н/м.
Выражения, приведенные в квадратных скобках, описывают эффект деформации изгиба и рассчитывают приближенно. Отношение ![]() , как правило, имеет значение от 0,37 для изотропных пластмасс в стеклообразном или полукристаллическом состоянии и до 0,33 для резин.
, как правило, имеет значение от 0,37 для изотропных пластмасс в стеклообразном или полукристаллическом состоянии и до 0,33 для резин.
10.1.2 Предотвращение резонанса образцов
Значение, получаемое по формуле (1), будут неверным при приближении частоты вибратора к собственной резонансной частоте колебаний образцов при сдвиге.
Собственную резонансную частоту колебаний закрепленных образцов , Гц, вычисляют по формуле
 , (2)
, (2)
где - плотность полимера, кг/м
.
Погрешность при использовании формулы (1) становится значительной при частотах испытания , Гц, удовлетворяющих условию:
 . (3)
. (3)
По этой причине определение динамических свойств следует ограничивать частотами ниже ![]() .
.
10.1.3 Поправка на резонанс датчика
При достаточно высоких частотах прикладываемая деформация вызывает резонансные колебания датчика силы. Резонансную частоту датчика , Гц, вычисляют по формуле
 , (4)
, (4)
где - жесткость датчика силы, Н/м;
- масса части устройства нагружения между датчиком силы и испытуемыми образцами, кг.
Показания датчика будут иметь значительную погрешность при частотах испытания, удовлетворяющих условию
![]() . (5)
. (5)
Резонансные частоты датчика силы и элементов устройства нагружения могут быть определены путем прямого снятия показаний собственной частоты выходного сигнала датчика после воздействия на прикрепленный к нему зажим при отсутствии образцов.
Скорректированную величину комплексной жесткости образцов , Н/м, вычисляют по формуле
 . (6)
. (6)
Формулы (4) и (5) рекомендуется использовать при выборе датчика силы, резонансная частота которого выше диапазона частот, требующих коррекции измерения силы.
10.1.4 Поправка на податливость оборудования
Если значение больше, чем 0,02
, в таком случае податливостью испытательной системы нельзя пренебречь и измеряемое значение смещения будет существенно отличаться от смещения образца. В таком случае используют поправку, вычисляемую по формуле
![]() , (7)
, (7)
где - скорректированный фазовый угол между силой и смещением (градусы), определяемый по формуле (8);
- измеренная жесткость стального образца с наибольшими размерами поперечного сечения, подходящими для установки в устройство нагружения, Н/м. Жесткость данного образца должна быть как минимум в 100 раз больше, чем жесткость наиболее жесткого среди испытуемых образцов.
Значение ![]() , вычисляемое по формуле (7), подставляют вместо
, вычисляемое по формуле (7), подставляют вместо ![]() в формулу (1) для получения более точной оценки
в формулу (1) для получения более точной оценки .
Примечание - Коррекцию на податливость не требуется проводить, если датчик смещения располагается так, чтобы осуществлять измерения относительного перемещения зажимов приспособления.
10.2 Расчет тангенса угла механических потерь
Приближенным значением для тангенса угла механических потерь при сдвиге является ![]() .
.
Если значение больше, чем 0,02
, то податливость устройства нагружения будет влиять на точность измерений фазового угла. В таком случае скорректированное значение тангенса угла механических потерь
вычисляют по формуле
![]() . (8)
. (8)
Примечание - Если источник податливости в устройстве нагружения заключается в наличии резьбовых или зажимных соединений, на измеряемый фазовый угол может влиять трение. Значение результирующей ошибки увеличивается с увеличением отношения
![]() . Этой ошибки можно избежать путем размещения датчика смещения таким образом, чтобы измерять относительное перемещение между зажимами приспособления.
. Этой ошибки можно избежать путем размещения датчика смещения таким образом, чтобы измерять относительное перемещение между зажимами приспособления.
10.3 Расчет модуля потерь
Модуль потерь , Па, вычисляют по формуле
![]() . (9)*
. (9)*
_______________
* Формула соответствует оригиналу. - .
10.4 Представление данных в зависимости от температуры
Изменение температуры - по ГОСТ Р 56801-2015 (подраздел 9.4).
11 Протокол испытаний
Протокол испытаний должен содержать:
a) ссылку на настоящий стандарт;
b) требования - по ГОСТ Р 56801-2015 (раздел 12, перечисления б)-н));
c) амплитуду динамической деформации при сдвиге, рассчитываемую приближенно как .
Приложение ДА
(справочное)
Оригинальный текст невключенных структурных элементов примененного международного стандарта
ДА.1 Раздел 11
11 Прецизионность
Прецизионность настоящего метода испытаний не установлена, поскольку нет данных по межлабораторным испытаниям. Когда данные по межлабораторным испытаниям будут получены, информация по точности будет добавлена в следующую редакцию стандарта.
Приложение ДБ
(справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Таблица ДБ.1
Структура настоящего стандарта | Структура международного стандарта ISO 6721-6 | ||||
Раздел | Подраздел | Пункт | Раздел | Подраздел | Пункт |
5 | 5.1 | 5.1.1 | 5 | 5.1 | - |
5.1.2 | 5.1.1 | ||||
5.1.3 | 5.1.2 | ||||
10 | - | - | 10 | 10.1 | - |
10.1 | 10.1.1 | 10.2 | - | ||
10.1.2 | 10.2.1 | ||||
10.1.3 | 10.2.2 | ||||
10.1.4 | 10.2.3 | ||||
10.2 | - | 10.3 | - | ||
10.3 | - | 10.4 | - | ||
10.4 | - | 10.5 | - | ||
- | - | - | 11 | - | - |
11 | - | - | 12 | - | - |
Приложения | ДА-ДВ | - | |||
Примечания 1 Сопоставление структур стандартов приведено для разделов 10, 12 и подраздела 5.1, так как другие разделы стандартов и их структурные элементы (за исключением предисловия) идентичны. 2 Условные обозначения, приведенные в 10.1 международного стандарта согласно требованиям ГОСТ 1.5, помещены после соответствующих формул. 3 Раздел 11 исключен, так как он не соответствует требованиям ГОСТ Р 1.5. | |||||
Приложение ДВ
(справочное)
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДВ.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ Р 56745-2015 | MOD | ISO 6721-2:2008 "Пластмассы. Определение механических свойств при динамическом нагружении. Часть 2. Метод крутильного маятника" |
ГОСТ Р 56801-2015 | MOD | ISO 6721-1:2011 "Пластмассы. Определение механических свойств при динамическом нагружении. Часть 1. Общие принципы" |
ГОСТ Р 56802-2015 | MOD | ISO 6721-7:1996 "Пластмассы. Определение механических свойств при динамическом нагружении. Часть 7. Крутильные колебания. Нерезонансный метод" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - MOD - модифицированные стандарты. | ||
УДК 678.017:006.354 | ОКС 83.080.01 |
Ключевые слова: пластмассы, механические свойства, динамическое нагружение, сдвиг, нерезонансный метод | |
Электронный текст документа
и сверен по:
, 2017
{kind=link}