ГОСТ Р 56804-2015
(ИСО 6721-4:2008)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Пластмассы
ОПРЕДЕЛЕНИЕ МЕХАНИЧЕСКИХ СВОЙСТВ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ
Часть 4
Колебания при растяжении. Нерезонансный метод
Plastics. Determination of dynamic mechanical properties. Part 4. Tensile vibration. Nonresonance method
ОКС 83.080.01*
______________
* По данным официального сайта Росстандарт
ОКС 19.060, здесь и далее по тексту. -
.
Дата введения 2017-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт авиационных материалов" совместно с Открытым акционерным обществом "НПО Стеклопластик" и Объединением юридических лиц "Союз производителей композитов" на основе аутентичного перевода на русский язык указанного в пункте 4 стандарта, который выполнен ФГУП ""
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 497 "Композиты, конструкции и изделия из них"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 27 ноября 2015 г. N 2061-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 6721-4:2008* "Пластмассы. Определение механических свойств при динамическом нагружении. Часть 4. Колебания при растяжении. Нерезонансный метод" (ISO 6721-4:2008 "Plastics - Determination of dynamic mechanical properties - Part 4: Tensile vibration - Non-resonance method").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При этом в него не включены ссылки на международные стандарты ИСО 6721-5 и ИСО 6721-6, не применяющиеся в системе государственной стандартизации Российской Федерации.
Раздел 11, не включенный в основную часть настоящего стандарта, приведен в дополнительном приложении ДА, сравнение структуры международного стандарта со структурой настоящего стандарта приведено в дополнительном приложении ДБ.
Дополнительные слова, фразы, показатели, включенные в текст настоящего стандарта для учета потребностей национальной экономики Российской Федерации, выделены курсивом*
________________
* В бумажном оригинале обозначения и номера стандартов и нормативных документов в разделах "Предисловие", 2 "Нормативные ссылки", приложениях ДА и ДБ приводятся обычным шрифтом; отмеченные в разделе "Предисловие" знаком "**" и остальные по тексту документа выделены курсивом. - .
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012** (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает метод вынужденных нерезонансных колебаний для определения компонентов комплексного модуля на растяжение E' полимеров при частотах, как правило, лежащих в диапазоне от 0,01 до 100 Гц. Метод подходит для измерения динамического модуля упругости в диапазоне от 0,01 до 5 ГПа. Хотя могут исследоваться материалы с модулями упругости вне пределов данного диапазона, более высокую точность обеспечивают другие виды деформации (т.е. колебания сдвига для E'<0,01 ГПа и колебания изгиба для E'>5 ГПа).
Данный метод особенно подходит для измерения тангенса угла механических потерь более 0,1, поэтому его удобно использовать для изучения зависимости динамических свойств от температуры и частоты на большей части области стеклования согласно ГОСТ Р 56801, пункт 9.4. Наличие данных, определенных в широком диапазоне частот и температур, позволяет, используя принцип температурно-временной суперпозиции, строить обобщенные графики, демонстрирующие динамические свойства на расширенном частотном диапазоне при различных температурах.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующий стандарт:
ГОСТ Р 56801-2015 (ИСО 6721-1:2001) Пластмассы. Определение механических свойств при динамическом нагружении. Часть 1. Общие принципы (ИСО 6721-1:2001, MOD)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 56801.
4 Сущность метода
Образец подвергают синусоидальному растягивающему нагружению или деформации при частоте значительно ниже собственной резонансной частоты продольных колебаний образца со свободными или закрепленными концами (см. 10.2.2). Измеряют амплитуды сил и смещения на образце, а также угол сдвига фаз между ними. При помощи уравнений из раздела 10 рассчитывают модули упругости и потерь.
5 Оборудование и материалы
5.1 Устройство нагружения
5.1.1 Общие положения
Оборудование должно обеспечивать измерение амплитуд и углов сдвига фаз между силой и смещением на образце, подвергаемом синусоидальной растягивающей нагрузке или деформации. Возможны различные конструкции приборов, например, схематично показанная на рисунке 1. Синусоидальная сила генерируется вибратором V и прилагается к одному концу образца S при помощи зажима C. Амплитуда и частота смещения плоскости вибратора являются переменными и контролируются датчиком D. Деталь между V и C
должна быть гораздо жестче образца и иметь низкий коэффициент теплопроводности, если образец будет помещаться в камеру с регулируемой температурой.
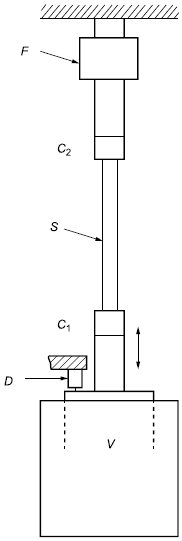
F - датчик силы; C, C
- зажимы; S - образец для испытания; D - датчик смещения; V - вибратор
Рисунок 1 - Возможная схема устройства нагружения для определения динамических модулей методом вынужденных нерезонансных колебаний в режиме растяжения
Примечание - Каждый элемент устройства нагружения может быть гораздо жестче образца, наличие зажимных или болтовых соединений может значительно повысить податливость конструкции. В этом случае может понадобиться применение коррекции податливости, выполняемой согласно 10.2.4.
Другой конец образца фиксируют вторым зажимом C, соединенным с датчиком силы F, опирающимся на жесткий каркас. Деталь между C
и F также должна иметь достаточную жесткость и низкий коэффициент теплопроводности.
5.1.2 Зажимы
Зажимы должны обеспечивать фиксацию образца с достаточным усилием во избежание выскальзывания образца во время деформации растяжения и сохранение усилия при низких температурах. Малейшее несовпадение осей зажимов по отношению к датчику силы приведет к появлению на датчике во время нагружения образца поперечной составляющей силы. Центровка устройства нагружения и образца должна быть такой, чтобы поперечная составляющая силы, воздействующая на датчик, не превышала 1% прикладываемой растягивающей силы. Рекомендуется использовать самоцентрирующиеся зажимы, т.к. в этом случае соосность образца и устройства нагружения обеспечивается независимо от толщины образца.
Поправка на изменение длины (см. 10.2.5) требует измерения жесткости образца для различных значений длины, определяемой расстоянием между зажимами. Такие измерения могут быть выполнены на одном образце, если один из зажимов имеет в центре основания отверстие, через которое образец может проходить по мере уменьшения расстояния между зажимами.
5.1.3 Датчики
Под термином "датчик" в настоящем стандарте понимается любое устройство, способное измерять прикладываемую силу или смещение, или отношение этих величин как функцию времени. Должна обеспечиваться прослеживаемость калибровок датчиков к национальным стандартам по измерению силы и длины. Для определения динамических свойств калибровки датчики должны иметь погрешность не более ±2% минимальных амплитуд нагрузки и смещения, прикладываемых к образцу.
5.2 Цифровые средства обработки данных
Цифровые средства обработки данных должны предусматривать возможность регистрации значений амплитуды силы и смещения с точностью ±1%, фазового угла между силой и смещением с точностью ±0,1°, а частоты - с точностью ±10%.
5.3 Измерение и регулировка температуры
Измерение и регулировка температуры - по ГОСТ Р 56801, пункты 5.3 и 5.5.
5.4 Устройства для измерения размеров образца для испытания
Устройства для измерения размеров образца - по ГОСТ Р 56801, пункт 5.6.
6 Образцы для испытания
6.1 Общие положения
Образцы - по ГОСТ Р 56801, раздел 6.
6.2 Форма и размеры
Для облегчения установки рекомендуется использовать образцы прямоугольного поперечного сечения. Различие толщины и ширины образца по всей длине должно быть не более 3% среднего значения. В тех случаях, когда необходимо получение результатов с высокой точностью, рекомендуется использовать образцы такой длины, которая позволила бы установить расстояние между зажимами 100 мм или более для увеличения точности определения динамической деформации растяжения. Кроме того, рекомендуется, чтобы длина образца между зажимами более чем в шесть раз превышала ширину образца, чтобы можно было пренебречь поперечным сжатием образца в области зажимов.
Требований к поперечным размерам образцов не предъявляется. Если в условиях испытания полимер демонстрирует упругое поведение, подбирают образец с достаточно малым поперечным сечением, чтобы вибратор был способен создать в продольном направлении смещение, которое можно измерить с требуемой точностью. Или, если полимер демонстрирует эластичное поведение, может потребоваться увеличить поперечное сечение образца для достижения необходимой точности при измерении силы.
Примечание - Образцы разной толщины, изготовленные методом литья под давлением, могут иметь различные динамические свойства из-за различий в структуре полимера в каждом образце.
6.3 Подготовка
Подготовка образцов - по ГОСТ Р 56801, пункт 6.3.
7 Количество образцов
Количество образцов - по ГОСТ Р 56801, раздел 7.
8 Кондиционирование образцов
Кондиционирование образцов - по ГОСТ Р 56801, раздел 8.
9 Проведение испытания
9.1 Атмосфера испытания
Атмосфера испытания - по ГОСТ Р 56801, пункт 9.1.
9.2 Измерение площади поперечного сечения образца
Измерение площади поперечного сечения - по ГОСТ Р 56801, пункт 9.2.
9.3 Крепление образца
Образец устанавливают в зажимах с усилием, достаточным для предотвращения выскальзывания образца в любых условиях испытания. Если наблюдается зависимость результатов измерения от усилия зажима, по возможности используют постоянное давление во всех измерениях, в особенности выполняемых с коррекцией длины образца (см. 10.2.5).
Примечание - Если наблюдается зависимость результатов измерения от усилия зажима, то область захвата образца слишком мала. Для устранения этой проблемы используют зажимы с большей поверхностью захвата или более широкие образцы.
9.4 Изменение температуры
Изменение температуры - по ГОСТ Р 56801, пункт 9.4.
9.5 Проведение испытания
К образцу прикладывают статическую растягивающую нагрузку, достаточную для предотвращения продольной деформации при наименьшей прикладываемой динамической нагрузке. Далее прикладывают динамическую нагрузку, которая приводит к таким амплитудам силы и смещения, которые датчики способны измерить с точностью, указанной в 5.1.3.
Примечание - Если деформация растяжения превышает предел упругости, то получаемые динамические свойства будут зависеть от величины прикладываемой деформации. Этот предел зависит от состава полимера и температуры и для стеклообразных пластмасс обычно составляет около 0,2%.
Требуется регистрировать следующие сигналы: амплитуду и частоту силы и смещения, фазовый угол между ними, а также температуру испытания. При выполнении измерений в диапазонах частот и температур рекомендуется сначала проводить измерение при самой низкой температуре с нарастающей частотой, а затем повторять измерение в этом же частотном диапазоне при более высоких температурах (см. ГОСТ Р 56801, п.9.4).
В испытаниях, где полимер демонстрирует средние или большие механические потери (например, в области перехода стеклования), рассеиваемая полимером энергия может привести к росту его температуры, достаточной для значительного изменения динамических свойств. Рост температуры резко увеличивается с увеличением амплитуды деформации и частоты. Если цифровые устройства обработки данных позволяют анализировать выходные сигналы датчика в течение нескольких первых циклов, то из-за роста температуры свойства образца будут меняться со временем, и это будет указывать на необходимость уделять повышенное внимание интерпретации результатов.
10 Обработка результатов
10.1 Расчет динамического модуля упругости при растяжении E'*
_______________
* Слово "E'" в наименовании пункта 10.1 в бумажном оригинале выделено курсивом. - .
10.1.1 Общие положения
Приближенное значение динамического модуля упругости при растяжении E', Па, вычисляют по формуле:
![]() , (1)
, (1)
где - измеренная амплитуда динамической силы, Н;
s - измеренная амплитуда динамического смещения, м;
L - длина образца между зажимами, м;
b - ширина образца, м;
d - толщина образца, м;
- измеренный фазовый угол между силой и смещением, градусы;
k - измеренная величина комплексной жесткости образца, Н·м.
10.1.2 Предотвращение резонанса образца
Формула (1) становится неверной при приближении частоты привода к собственной резонансной частоте колебаний образца в продольном направлении , Гц, приближенно вычисляемой по формуле:
 , (2)
, (2)
где - плотность полимера, кг/м
.
Погрешность при использовании формулы (1) становится значительной при частотах испытания f, Гц, удовлетворяющих условию:
 . (3)
. (3)
По этой причине определение динамических свойств необходимо проводить при частотах ниже той, которая выводится из равенства в уравнении (3).
10.1.3 Поправка на резонанс датчика
При достаточно высоких частотах прилагаемая деформация приведет датчик силы в состояние резонанса. Резонансную частоту f, Гц, вычисляют по формуле:
 , (4)
, (4)
где k- жесткость датчика силы, Н/м;
m - масса части устройства нагружения, которая располагается между датчиком силы и образцом для испытания, кг.
Выходной сигнал датчика будет иметь значительную погрешность при частотах испытания, удовлетворяющих условию:
![]() . (5)
. (5)
Резонансная частота датчика силы и поддерживаемая масса m
могут быть определены непосредственно регистрацией собственной частоты выходного сигнала датчика после воздействия на прикрепленный к нему зажим в отсутствие образца.
Жесткость образца с поправкой на резонанс датчика с хорошим приближением описывается формулой:
 , (6)
, (6)
где k - скорректированная величина комплексной жесткости образца, Н·м.
Для выбора датчика силы, резонансная частота которого выше частотного диапазона, для которого необходимо измерение коррекции силы, рекомендуется применять уравнения (4) и (5).
10.1.4 Поправка на податливость прибора
Если k превышает 0,02k
, то податливостью испытательной системы пренебречь нельзя, и измеряемое смещение значительно отличается от смещения образца. В этом случае применяют поправку, вычисляемую по формуле:
![]() , (7)
, (7)
где - скорректированный фазовый угол между силой и смещением, градусы, задаваемый уравнением (10);
k - измеренная жесткость, Н/м, стального образца с наибольшими размерами поперечного сечения, подходящими под зажимы (см. примечание). Жесткость данного образца должна быть как минимум в 100 раз больше, чем жесткость наиболее жесткого испытуемого образца из полимерного материала.
Примечание - Величина k является оценкой жесткости устройства нагружения, что равносильно пружине, последовательно соединенной с образцом, и позволяет рассчитать поправку на податливость прибора (см.10.2.4).
Значение kcos, получаемое из формулы (7), используют вместо k
cos
в формуле (1) для получения более точной оценки E'
.
Примечание - Проведение коррекции податливости не требуется, если датчик смещения расположен таким образом, чтобы измерять изменение расстояния между зажимами, или если к образцу прикрепляют экстензометры.
10.1.5 Применение поправки к длине
Использование измеренного расстояния между зажимами L в качестве длины образца в формуле (1) не учитывает некоторой деформации образца в области зажимов. Применяя небольшую поправку к L
, таким образом, чтобы эффективная длина равнялась
, и предполагая
независимой от L
из формулы (1) получают уравнение:
![]() , (8)
, (8)
где E' - скорректированный динамический модуль упругости при растяжении, Па;
- поправка к длине, м.
Это уравнение учитывает поправку на податливость прибора с использованием формулы (7). Значение поправки к длине можно установить на основании измерения жесткости образца k для нескольких различных расстояний между зажимами L
. Из формулы (8) следует, что по графику зависимости
![]() от L
от L значение
можно определить из отрезка, отсекаемого на оси абсцисс при
![]() =0, а E' - из угла наклона графика.
=0, а E' - из угла наклона графика.
Примечания
1 Значение будет зависеть от формы поперечного сечения и размеров образца, а также температуры, если при этом происходит значительное изменение динамического модуля упругости.
2 Применение поправки к длине не требуется, если динамическую деформацию измеряют при помощи экстензометров, прикрепленных к образцу.
10.2 Расчет тангенса угла механических потерь при растяжении tg
Приближенным значением для тангенса угла механических потерь при растяжении является tg.
Примечание - В англоязычной литературе для тангенса угла механических потерь (также называемого коэффициентом потерь) принято сокращение tan.
Если k превышает 0,02k
, то податливость устройства нагружения скажется на точности измерения фазового угла. Тангенс угла механических потерь в этом случае вычисляют по формуле:
 , (9)
, (9)
где tg - скорректированный тангенс угла механических потерь при растяжении.
Примечание - Если источник податливости в устройстве нагружения заключается в наличии резьбовых или зажимных соединений, на измеряемый фазовый угол может влиять трение. Величина возникающей ошибки увеличивается вместе с отношением
![]() . Появления этой ошибки можно избежать, расположив датчик смещения таким образом, чтобы измерять изменение расстояния между зажимами, или если к образцу прикрепить экстензометры.
. Появления этой ошибки можно избежать, расположив датчик смещения таким образом, чтобы измерять изменение расстояния между зажимами, или если к образцу прикрепить экстензометры.
10.3 Расчет модуля потерь при растяжении E"
Модуль механических потерь E", Па, вычисляют по формуле:
![]() . (10)
. (10)
10.4 Изменение температуры
Изменение температуры - по ГОСТ Р 56801, пункт 9.4.
11 Протокол испытания
Протокол испытания должен содержать следующую информацию:
a) ссылку на настоящий стандарт;
b) требования - по ГОСТ Р 56801, раздел 12, перечисления б)-н);
c) амплитуду динамической деформации, приближенно определяемую как ![]() .
.
Приложение ДА
(справочное)
Оригинальный текст невключенных элементов
ДА.1 Раздел 11
11 Прецизионность
Прецизионность данного метода испытаний неизвестна вследствие отсутствия данных межлабораторных испытаний. После получения межлабораторных данных в последующую редакцию стандарта будет внесена информация о прецизионности.
Примечание - Раздел исключен, так как он не соответствует требованиям ГОСТ 1.5.
Приложение ДБ
(справочное)
Сравнение структуры международного стандарта со структурой настоящего стандарта
Таблица ДБ.1
Структура международного стандарта ИСО 6721-4:2008 | Структура настоящего стандарта |
Раздел 10 | Раздел 10 |
Пункты | Пункты |
10.1 | - |
10.2 | 10.1 |
10.3 | 10.2 |
10.4 | 10.3 |
10.5 | 10.4 |
Раздел 11 | - |
Раздел 12 | Раздел 11 |
Примечания 1 Сопоставление структур стандартов приведено, начиная с раздела 10, так как предыдущие разделы стандартов и их иные структурные элементы (за исключением предисловия) идентичны. 2 Пункт 10.1 международного стандарта исключен, так как условные обозначения помещены после формул согласно требованиям ГОСТ 1.5. 3 Раздел 11 исключен, так как он не соответствует требованиям ГОСТ 1.5. | |
УДК 678.017:006.354 | ОКС 83.080.01 | MOD |
Ключевые слова: пластмассы, динамическое нагружение, растяжение, нерезонансный метод, композитные материалы | ||
Электронный текст документа
и сверен по:
, 2016
{kind=link}