ГОСТ Р ИСО 11843-7-2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Статистические методы
СПОСОБНОСТЬ ОБНАРУЖЕНИЯ
Часть 7
Методы оценки с учетом фонового шума
Statistical methods. Capability of detection. Part 7. Methods of an estimation taking into account background noise
ОКС 03.120.30*
_____________________
* В ИУС N 11 2020 г. ГОСТ Р ИСО 11843-7-2014 приводится с ОКС 03.120.30, 17.020,
здесь и далее. - .
Дата введения 2015-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 125 "Применение статистических методов"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 октября 2014 г. N 1453-ст.
4 Настоящий стандарт идентичен международному стандарту ИСО 11843-7:2012* "Способность обнаружения. Часть 7. Методы оценки с учетом фонового шума" (ISO 11843-7:2012 "Capability of detection - Part 7: Methodology based on stochastic properties of instrumental noise", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Октябрь 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Методология линейной и нелинейной калибровки, приведенная в серии стандартов ИСО 11843, основана на использовании распределения вероятностей приведенной переменной состояния (измеряемая величина). При этом (явно или неявно) уделено внимание неопределенности, соответствующей оценке измеряемого отклика, преимущественно определяемого базовым шумом при инструментальном анализе. Во многих (если не в большинстве) аналитических приборах в тех случаях, когда значение измеряемой величины близко к минимальному обнаруживаемому значению, базовый шум является основной причиной неопределенности. Метод, установленный в настоящем стандарте в пределах его области применения, не требует использования большого количества повторных образцов (выборок), что способствует экономии времени и средств.
Основным понятием настоящего стандарта является математическое описание распределения вероятностей переменной отклика в терминах математически определенных случайных процессов. Это описание приводит к определению минимального обнаруживаемого значения. Взаимосвязь отклика и измеряемой величины описывают с помощью линейных и нелинейных калибровочных функций. Таким образом, настоящий стандарт согласован с ИСО 11843-2 и ИСО 11843-5.
Определение и применение минимального обнаруживаемого значения установлены в ИСО 11843-1 и ИСО 11843-2
; определение и применение функции прецизионности установлены в ИСО 11843-5
. Функция прецизионности отражает зависимость точности от приведенной переменной состояния. В настоящем стандарте применены основные понятия стандартов серии ИСО 11843 в случае преобладания фонового шума при инструментальном анализе.
_______________
ИСО 11843-1:1997 Способность обнаружения. Часть 1. Термины и определения (ISO 11843-1:1997 Capability of detection - Part 1: Terms and definitions).
ИСО 11843-2:2000 Способность обнаружения. Часть 2. Методология в случае линейной калибровки (ISO 11843-2:2000 Capability of detection - Part 2: Methodology in the linear calibration case).
ИСО 11843-5:2008 "Способность обнаружения. Часть 5. Методология в случаях линейной и нелинейной калибровки (ISO 11843-5:2008 Capability of detection - Part 5: Methodology in the linear and non-linear calibration cases).
Минимальное обнаруживаемое значение , как правило, выражают в единицах приведенной переменной состояния. Если калибровочная функция линейна, стандартное отклонение или коэффициент вариации переменной отклика, рассматриваемые в настоящем стандарте, могут быть линейно связаны со стандартным отклонением или коэффициентом вариации приведенной переменной состояния, которая может быть использована для оценки минимального обнаруживаемого значения
.
Если калибровочная функция нелинейна, функция прецизионности переменной отклика в ИСО 11843 должна быть преобразована в функцию прецизионности приведенной переменной состояния, как показано в ИСО 11843-5. В этой ситуации ИСО 11843-5 может быть использован для целей настоящего стандарта без каких-либо изменений.
Положения настоящего стандарта, относящиеся к калибровке, распространяются также на градуировку. При этом под калибровочной функцией следует понимать градуировочную кривую.
1 Область применения
Фоновый шум всегда существует в аналитических инструментах. В настоящем стандарте установлены методы оценки минимального обнаруживаемого значения в случае, когда фоновый шум является преобладающим источником неопределенности измерений. Минимальное обнаруживаемое значение может быть математически выведено на основе стохастических характеристик фонового шума.
В стандарте установлены основные методы:
- определения стохастических свойств фонового шума;
- использования стохастических свойств фонового шума для оценки стандартного отклонения (SD) или коэффициента вариации (CV) переменной отклика;
- вычисления минимального обнаруживаемого значения на основе SD или CV (полученных выше).
Методы, установленные в настоящем стандарте, полезны для проверки обнаружения вещества с помощью различного типа измерительного оборудования, в котором фоновый шум преобладает над другими источниками неопределенности. Таким измерительным оборудованием могут быть приборы видимой и ультрафиолетовой поглотительной спектрометрии, атомной поглотительной спектрометрии, атомно-флуоресцентной спектрометрии, люминесцентной спектрометрии жидкостей и газовой хроматографии.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ISO 11843-1:1997, Capability of detection - Part 1: Terms and definitions (Способность обнаружения. Часть 1. Термины и определения)
ISO 11843-2:2000, Capability of detection - Part 2: Methodology in the linear calibration case (Способность обнаружения. Часть 2. Методология в случае линейной калибровки)
ISO 11843-5:2008, Capability of detection - Part 5: Methodology in the linear and non-linear calibration cases (Способность обнаружения. Часть 5. Методология в случаях линейной и нелинейной калибровки)
ISO 3534-1, Statistics - Vocabulary and symbols - Part 1: General statistical terms and terms used in probability (Статистика. Словарь и условные обозначения. Часть 1. Общие статистические термины и термины, используемые в вероятностных задачах)
ISO 3534-2, Statistics - Vocabulary and symbols - Part 2: Applied statistics (Статистика. Словарь и условные обозначения. Часть 2. Прикладная статистика)
ISO 3534-3, Statistics - Vocabulary and symbols - Part 3: Design of experiments (Статистика. Словарь и условные обозначения. Часть 3. Планирование эксперимента)
ISO 5725-1, Accuracy (trueness and precision) of measurement methods and results - Part 1: General principles and definitions [Точность (правильность и прецизионность) методов и результатов измерений. Часть 1. Общие принципы и определения]
3 Термины и определения
В настоящем стандарте применены термины по ИСО 3534-1, ИСО 3534-2, ИСО 3534-3, ИСО 5725-1, ИСО 11843-1, ИСО 11843-2, ИСО 11843-5, а также следующие термины с соответствующими определениями:
3.1 функция прецизионности (precision profile): Математическое описание стандартного отклонения (SD) переменной отклика [(Х)] или стандартного отклонения приведенной переменной состояния [
(Х)] как функций приведенной переменной состояния.
[ИСО 11843-5:2008, пункт 3.4]
Примечание 1 - Коэффициент вариации (CV) переменной отклика или приведенной переменной состояния, как функции приведенной переменной состояния, также применяют в качестве функции прецизионности.
Примечание 2 - Под точностью понимают значение SD или CV наблюдаемой переменной отклика или SD или CV приведенной переменной состояния при оценке с помощью калибровочной функции (ИСО 11843-5).
3.2 минимальное обнаруживаемое значение приведенной переменной состояния (minimum detectable value of the net state variable), : Значение приведенной переменной состояния в действительном состоянии, которое с вероятностью (1-
) ведет к заключению о том, что система не находится в базовом состоянии.
Примечание 1 - Если стандартное отклонение приведенной переменной ![]() является константой [
является константой [![]() =
=], то минимальное обнаруживаемое значение
определяется как
![]() , (1)
, (1)
где - коэффициент, используемый для определения вероятности ошибки первого рода;
- коэффициент, используемый для определения вероятности ошибки второго рода.
Если стандартное отклонение переменной отклика является константой [
![]() =
=], то минимальное обнаруживаемое значение может быть вычислено с помощью следующего уравнения
![]() , (2)
, (2)
где ![]() - абсолютная величина углового коэффициента линейной калибровочной функции, который является постоянным.
- абсолютная величина углового коэффициента линейной калибровочной функции, который является постоянным.
Примечание 2 - Если приведенная переменная состояния имеет нормальное распределение, для ошибок первого и второго рода, равных 5%, коэффициенты =
=1,65, а формула (1) может быть упрощена до вида
![]() .
.
Примечание 3 - Если ![]() , формула (1) принимает вид
, формула (1) принимает вид ![]() =1/3,30=30%. Поэтому значение
=1/3,30=30%. Поэтому значение может быть найдено с помощью функции прецизионности. Значение
соответствует
![]() , коэффициент вариации которой составляет 30%.
, коэффициент вариации которой составляет 30%.
Примечание 4 - Существует большое количество видов функции прецизионности, но они могут быть преобразованы одна в другую.
Например, стандартное отклонение ![]() переменной отклика может быть преобразовано в стандартное отклонение
переменной отклика может быть преобразовано в стандартное отклонение ![]() приведенной переменной состояния с помощью абсолютного значения производной
приведенной переменной состояния с помощью абсолютного значения производной ![]() калибровочной функции
калибровочной функции ![]() :
: ![]() (ИСО 11843-5). Точность этого приближения зависит от кривизны функции в точке определения
(ИСО 11843-5). Точность этого приближения зависит от кривизны функции в точке определения ![]() .
.
Примечание 5 - Адаптированное определение по ИСО 11843-5:2008.
4 Количественный анализ и фоновый шум
4.1 Источники ошибок при анализе
Количественный анализ процедуры получения значения измеряемой величины, как правило, включает подготовку пробы (выборки), инструментальный анализ, обработку данных и калибровку. Эти этапы анализа технически не зависят друг от друга как процедурно, так и в вероятностном смысле.
В настоящем стандарте рассмотрен только инструментальный анализ. Однако ошибки других этапов также влияют на конечное значение измеряемой величины. Таким образом, суммарная неопределенность оценки измеряемой величины зависит от неопределенностей соответствующих этапов. Для использования настоящего стандарта необходимо выполнение следующих условий.
Если значение содержания вещества близко к минимальному обнаруживаемому значению в хроматографии, то ошибка, соответствующая вводимой в хроматограф пробе, менее значима (например, коэффициент вариации CV=0,3% в современном аппарате), чем фоновый шум (CV=30% по определению). Если влияние другого фактора (не шума) сопоставимо с влиянием шума, методы настоящего стандарта не применимы.
Обработка данных - процесс, направленный на выделение из общего инструментального шума таких параметров сигнала, как высота или площадь пика (относительная высота вершины пикобразного сигнала или интеграл интенсивности по области сигнала, соответственно). В настоящем стандарте приведен метод статистического анализа влияния этого процесса на неопределенность результатов измерений. Использование цифрового или аналогового фильтра также может быть учтено при выполнении анализа шума после фильтрации.
4.2 Случайный процесс фонового шума
Типичными примерами переменной отклика в хроматографии являются высота и площадь пика. В настоящем стандарте за разность [формула (6)] и площадь [формулы (10) и (11)] интенсивностей принимают соответственно разность и сумму интенсивностей выходных данных измерительного прибора. Переменные отклика обычно независимы друг от друга, даже если они получены в результате последовательных измерений одним и тем же прибором. С другой стороны, последовательные интенсивности
сформулированы, как независящий от времени случайный процесс, и во многих случаях может быть рассмотрен шум 1/f (см. [1]).
Спектр мощности P(f) шума 1/f имеет угловой коэффициент, обратно пропорциональный частоте
![]() , (3)
, (3)
где f близко к нулю.
В математической теории самая простая модель случайного процесса - белый шум. Пусть - случайная переменная белого шума в i-й точке. По определению среднее белого шума равно нулю, а стандартное отклонение
белого шума является постоянным в каждой точке i. Яркой особенностью белого шума является то, что интенсивности
и
не зависят друг от друга, если
.
Марковский процесс представляет собой математическую модель, в которой интенсивности и
не являются независимыми друг от друга (
). Марковский процесс рассматривают как основу зависящих от времени выходных данных измерительного прибора [см. (9)]. Марковский процесс в точке i имеет вид:
![]() , (4)
, (4)
где - случайная переменная белого шума в точке i;
- постоянный параметр (-1
1).
5 Теория прецизионности
5.1 Теория, основанная на функции автоковариации
Теория, предложенная Вайнефорднером (см. [2], [3], [4]), основана на функции автоковариации
![]() , (5)
, (5)
где - математическое ожидание случайной переменной, указанной в квадратных скобках в точке
.
|
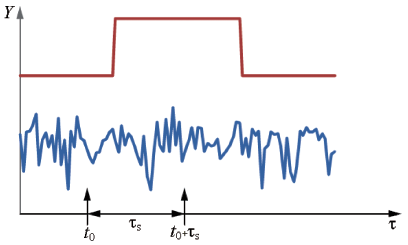
Рисунок 1 - Сигнал (верхняя линия) и шум (нижняя линия) с различными интенсивностями
В верхней части рисунка 1 изображен сигнал в виде приблизительно прямоугольного импульса. Шум (являющийся фоном), накладывающийся на сигнал, изображен в нижней части рисунка. - значение времени при отсутствии сигнала, а
![]() - значение времени при наличии сигнала. Измерение (чтение сигнала) представляет собой разность интенсивностей в моменты времени
- значение времени при наличии сигнала. Измерение (чтение сигнала) представляет собой разность интенсивностей в моменты времени и (
![]() ). В отсутствие фонового шума значение сигнала в точке
). В отсутствие фонового шума значение сигнала в точке равно нулю. При проведении измерений в точке (
![]() ) сигнал имеет конечное значение. В настоящем стандарте приведены модели измерений, в которых сигнал и шум накладываются друг на друга, этот общий случайный процесс принимает значение
) сигнал имеет конечное значение. В настоящем стандарте приведены модели измерений, в которых сигнал и шум накладываются друг на друга, этот общий случайный процесс принимает значение в момент времени
. Интенсивности сигнала в точках
и (
![]() ) обозначают
) обозначают и
соответственно, а разность интенсивностей соответствует (6).
|
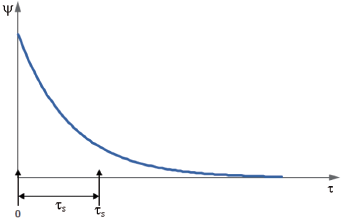
Рисунок 2 - Функция автоковариации шума
Разность значений функции автоковариации в точках 0 и
представляет собой правую часть формулы (7). Минимальное обнаруживаемое значение связано с фоновым шумом, разность интенсивностей сигнала часто применяют в аналитической оптической спектрометрии. Определение разности интенсивностей сигнала, например чтение сигнала с поправкой на фоновый см. в [2], [3], [4].
![]() . (6)
. (6)
Здесь соответствует переменной отклика Y. Дисперсия разности интенсивностей сигнала имеет вид (7) (см. также [2], [3], [4]). Обоснование формулы (7) приведено в приложении В.
![]() . (7)
. (7)
Формула (7) имеет практическое применение (см. рисунок 2), когда фактические функции автоковариации и
![]() известны из наблюдений за фоновым шумом. Подставляя значение
известны из наблюдений за фоновым шумом. Подставляя значение из формулы (7) в формулу (2) (
![]() ) можно получить минимальное обнаруживаемое значение.
) можно получить минимальное обнаруживаемое значение.
Можно использовать теорему Винера-Хинчина (см. [5]), которая связывает функцию автоковариации со спектральной плотностью мощности (спектром мощности) через преобразование Фурье
 , (8)
, (8)
где ![]() - спектр мощности наблюдаемого фонового шума;
- спектр мощности наблюдаемого фонового шума;
G(f) - частотная характеристика (линейной) системы считывания данных.
Формула (8) показывает, как оценить стандартное отклонение (см. формулу (7)) на основе спектра мощности шума.
5.2 Теория, основанная на спектре мощности
Теория, основанная на спектре мощности базовой линии, или теория FUMI (функции взаимной информации) (см. [6], [7], [8]), дает возможность вычислять стандартное отклонение измеренных площади и высоты пика при инструментальном анализе. Измеренные значения представляют собой суммарную интенсивность выходных данных измерительного прибора по заданной области, как показано на рисунке 3. Если сигнал (форма и размер) является инвариантным, ошибка при измерении площади или высоты пика связана только с шумом и равна площади (высоте), соответствующей шуму в заданной области. Таким образом, ошибка измерений характеризуется площадью (высотой) пика, соответствующей шуму. Стандартные отклонения площади (высоты) пика шума, совпадают со стандартными отклонениями измеренных площади (высоты) пиков.
|

Z - нулевая область (область отсутствия сигнала); S - область сигнала; I - область наложения сигнала и шума; (остальные обозначения см. в приложении А)
Рисунок 3 - Сигнал и шум в нулевой области и области наложения сигнала и шума
Количество точек данных в области наложения сигнала и шума равно (![]() ).
).
В теории FUMI интенсивность шума в точке i описана как наложение случайных процессов белого шума и Марковского процесса:
![]() . (9)
. (9)
Целью теории FUMI является определение оценки стандартного отклонения шума по измерениям в заданной области (см. рисунок 3).
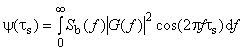
На практике, особенно в хроматографии, приняты различные способы объединения сигнала и шума (см. рисунок 4). Измеряемой величиной является объединенная интенсивность выше базовой линии, которая может быть горизонтальной или наклонной в пределах области [![]() ,
, ]. Горизонтальной базовой линией является горизонтальная линия интенсивности в нулевой точке. Наклонная базовая линия соединяет интенсивности на краях области наложения сигнала и шума [0,
]. Это обычно можно наблюдать в хроматографии (явление "дрейфа").
|
Рисунок 4 - Модели наложения выше горизонтальной линии (пунктирная линия) и наклонной линии (сплошная линия) между точками и
Площадь области между случайной траекторией процесса "сигнал плюс шум" и горизонтальной линией в заданной области можно записать в виде:
 , (10)
, (10)
где интенсивность шума описана формулой (9), a
- временной интервал между последовательными данными.
Если в качестве базовой линии использована наклонная линия, принимает вид:
 , (11)
, (11)
где - площадь области в виде трапеции, образованной наклонной прямой, горизонтальной прямой и вертикальными прямыми, проходящими через краевые точки заданной области (
![]() ) и
) и (см. рисунок 4). Для ситуации, представленной на рисунке 4, площадь
берут с отрицательным знаком. Если наклонная линия расположена в заданной области выше горизонтальной линии, площадь трапеции берут с положительным знаком.
Общее выражение для стандартного отклонения имеет вид:
![]() , (12)
, (12)
где - среднее случайной величины, указанной в квадратных скобках. Необходимо отметить, что Е[
]=0, так как по определению среднее шума с горизонтальной базовой линией (первый член в правой части формулы (11)) равно нулю и среднее для
равно нулю (см. приложение С).
Приведенные формулы справедливы в условиях предположения, что не существует неопределенности нулевого уровня, т.е. =0. Однако такая неопределенность существует и ее следует учитывать. Измерения в хроматографии обычно выполняют относительно нулевого уровня, который является выборочным средним интенсивностей шума по области, упомянутой в настоящем стандарте, как нулевая (см. рисунок 3).
Квадрат стандартного отклонения в пределах нулевой области имеет вид (см. [6], [7], [8]):
![]() , (13)
, (13)
где - дисперсия, соответствующая нулевой области;
- дисперсия, соответствующая измеряемой области [
задана формулой (12)].
Обоснование формул (14) и (15) приведено в приложении С. Минимальное обнаруживаемое значение может быть получено подстановкой формулы (13) в формулу (2).
Дисперсия может быть описана следующим образом (см. [6], [7], [8]):
 . (14)
. (14)
Влияние объединения сигналов в установленной области принимает вид (см. [6], [7], [8]):

 , (15)
, (15)
где ![]() (16)
(16)
- SD белого шума;
- SD белого шума, включенного в Марковский процесс;
- постоянный параметр Марковского процесса;
,
и
- показаны на рисунках 3 и 4;
b - количество последовательных данных (точек) в нулевой области [-b + 1, 0].
Пять членов в формуле (15) обозначают следующие стохастические вклады в неопределенность измерений:
- первый член: погрешность белого шума в области объединения сигнала и шума (всего точек ![]() );
);
- второй член: ошибка Марковского процесса в области объединения сигнала и шума (![]() точек);
точек);
- третий член: влияние точек между нулевой точкой и начальной точкой области объединения сигнала и шума;
- четвертый член: влияние белого шума при наклонной базовой линии;
- пятый член: влияние Марковского процесса при наклонной базовой линии.
6 Практическое применение теории FUMI
6.1 Оценка параметров шума
Все параметры, необходимые для применения теории FUMI, т.е. формул (13)-(16), могут быть однозначно определены на основе экспериментальных данных. Параметры сигнала (b, ,
,
) могут быть установлены в соответствии с формой целевого пика, как показано на рисунке 3. С другой стороны параметры шума (
,
,
) автоматически определяют по спектральной плотности мощности шума, как описано ниже.
Спектральную плотность мощности шума получают с помощью преобразования Фурье результатов измерений . Преобразование Фурье и инверсия преобразования Фурье имеют вид:
![]() , (17)
, (17)
![]() , (18)
, (18)
где N - количество наблюдений, включенных в область преобразования Фурье;
![]() ;
;
j - мнимая единица.
Спектральная плотность мощности P(k) случайного процесса имеет вид:
![]() , (19)
, (19)
где - сопряженное число к
.
Если принять модель шума, описанную формулой (9), спектральная плотность мощности в формуле (19) может быть описана (см. [6], [7], [8]) следующей формулой:
 . (20)
. (20)
Параметры ,
,
, необходимые для теории FUMI, могут быть определены с помощью нелинейного метода наименьших квадратов при аппроксимации формулой (20) спектральной плотности мощности фактического фонового шума.
Первый член преобразования Фурье в формулах (19) и (20) является постоянной составляющей, а соответствующей спектральной плотностью Р(0) можно пренебречь. Частота k в формуле (20) является целым числом, но может быть ограничена диапазонами от 1 до N/2, где N/2 - частота Найквиста. Типичный пример формулы (20) показан на рисунке 5.
На практике частоту k часто выражают в герцах. Если - временной интервал между последовательными точками (интервал аналого-цифрового преобразователя, используемого для получения данных
). Частота, соответствующая k (= 1, 2, ..., N/2) имеет вид
![]() .
.
|
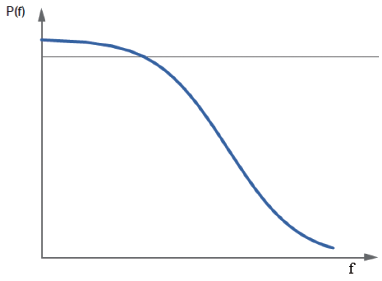
Рисунок 5 - Спектральная плотность мощности смоделированного шума
На практике спектральная плотность мощности сигнала является обычно менее гладкой, чем показанная на рисунке 5. При обработке реальных наблюдений обычно наблюдаются небольшие отклонения от гладкой кривой.
6.2 Процедуры оценки стандартного отклонения
При применении теории FUMI для определения оценки стандартного отклонения в области выполнения измерений необходимы выходные данные измерительного прибора, что в свою очередь позволяет определить минимальное обнаруживаемое значение. Полный набор этапов вычислений показан на рисунке 6.
Для определения параметров сигнала и шума необходимы значения выходных данных (хроматограммы, спектры). Параметры сигнала включают область сигнала от точки 0 до точки , область наложения сигнала и шума от точки (
) до точки
и нулевую область от точки 0 до (
![]() ) (см. рисунок 3). Область сигнала включает (
) (см. рисунок 3). Область сигнала включает (![]() ) данных, область наложения сигнала и шума (
) данных, область наложения сигнала и шума (![]() ) данных, а нулевая область - b данных.
) данных, а нулевая область - b данных.
Параметры сигнала произвольны, но на практике будут полезны следующие рекомендации. Для Гауссовского сигнала, показанного на рисунке 3, область сигнала может охватывать ± или ±
вокруг центра сигнала, где
- стандартное отклонение (ширина сигнала), а центр сигнала является средним Гауссовского сигнала (
![]() или
или ). Во многих случаях результатами измерений являются высота или вся площадь пика. Для измерений высоты пика
![]() . Для измерений площади пика
. Для измерений площади пика ![]() и
и =0. Во всех случаях количество данных (точек) в области объединения сигнала и шума составляет (
![]() ). Объединение по части области сигнала, как показано на рисунке 3, также эффективно с точки зрения точности. Нулевая область может быть установлена опытным путем, как область более узкая, чем область сигнала, как показано на рисунке 3.
). Объединение по части области сигнала, как показано на рисунке 3, также эффективно с точки зрения точности. Нулевая область может быть установлена опытным путем, как область более узкая, чем область сигнала, как показано на рисунке 3.
В отличие от параметров сигнала, параметры шума (,
,
) однозначно определяют в соответствии со стохастическими свойствами фонового шума. Некоторые примеры из хроматографии приведены в таблице 1. На первом этапе необходимо идентифицировать область фонового шума, где нет существенного вклада сигнала.
На втором этапе выполняют преобразование Фурье фонового шума в этой области и вычисляют спектральную плотность мощности по формуле (20). Если в формуле (20) количество точек N не превышает 2, для быстрого преобразования Фурье рекомендуется использовать 512 или 1024 точки, в том числе 50 или 100 точек в области сигнала.
На третьем этапе методом наименьших квадратов подбирают теоретическую кривую [формула (20)] для спектральной плотности мощности, как упомянуто выше. При небольшом количестве данных в области быстрого преобразования Фурье (например, 32) в некоторых случаях появляется смещение оценок параметров шума.
Параметры сигнала и шума, определенные как упомянуто выше, подставляют в формулы (13)-(16) для получения окончательного значения в соответствии с теорией FUMI (точности).
Применимость теории FUMI довольно широка, но существуют две ситуации, в которых она не применима:
- основным источником погрешности не является фоновый шум. В масс-спектроскопии, если процесс ионизации дает намного большую погрешность, чем шум, теория FUMI дает заниженное значение стандартного отклонения в области измерений;
- если фактический инструментальный шум включает шум, который не может быть успешно аппроксимирован объединенным процессом белого шума и Марковского процесса. Пример - шум высокой интенсивности.
Минимальное обнаруживаемое значение может быть найдено графически на основе показателей прецизионности, как приведенная переменная состояния, в которой коэффициент вариации приведенной переменной состояния составляет 30%. Этот метод также применим для коэффициента вариации переменной отклика, так как функция прецизионности приведенной переменной состояния идентична таковой для переменной отклика, если калибровочная функция линейна (см. [9], [10]). В случае нелинейной калибровочной функции, функции прецизионности переменной отклика и приведенной переменной состояния различны. В этом случае для преобразования различных функций прецизионности и оценки минимального обнаруживаемого значения применяют метод, установленный в ИСО 11843-5.
Таблица 1 - Пример оценки параметров шума в хроматофграфии (см. [6])
Эксперимент | |||
Эксперимент А | 14 | 3,7 | 0,99 |
Эксперимент В | 12 | 9,0 | 0,94 |
Эксперимент С | 14 | 5,6 | 0,99 |
|
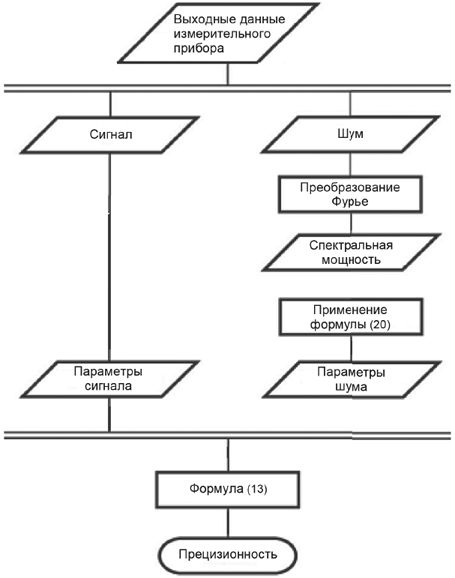
Рисунок 6 - Процедуры теории FUMI
Приложение А
(справочное)
Обозначения и сокращения
SD | - | стандартное отклонение; |
CV | - | коэффициент вариации (SD, деленное на среднее); |
Х | - | приведенная переменная состояния; |
Y | - | переменная отклика (измеренные площадь или высота пика); |
- | i-ое значение времени из ряда | |
- | отрезок времени ( | |
- | интенсивность выходных данных прибора в момент времени | |
- | интенсивность выходных данных прибора t (сумму | |
- | минимальное обнаруживаемое значение приведенной переменной состояния; | |
- | коэффициент для определения вероятности ошибки первого рода; | |
- | коэффициент, используемый для определения вероятности ошибки второго рода; | |
| - | SD переменной отклика как функция X; |
| - | SD приведенной переменной состояния как функция X; |
| - | производная калибровочной функции (абсолютная величина); |
- | среднее (математическое ожидание) случайной величины, указанной в квадратных скобках; | |
- | функция автоковариации с запаздыванием | |
- | значение случайной величины белого шума со средним, равным нулю и SD, равным | |
- | SD белого шума | |
- | значение случайной величины Марковского процесса в точке i; | |
- | белый шум, включенный в Марковский процесс, в точке i, определенный формулой (4); | |
- | SD белого шума m | |
- | отношение, используемое для сохранения предыдущего состояния, определенного формулой (4); | |
- | созданная шумом площадь (без сигнала); | |
FUMI | - | функция взаимной информации. |
Приложение В
(справочное)
Обоснование формулы (7)
Дисперсия разности интенсивностей в точках и (
![]() ) имеет вид (см. [2-4]):
) имеет вид (см. [2-4]):
![]() . (В.1)
. (В.1)
В соответствии с определением функции автоковариации [формула (5)] второй член в правой части формулы (B.1) может быть записан в виде:
![]() . (В.2)
. (В.2)
Предположение о стационарности фонового шума уравнивает первый и второй члены правой части формулы (B.1)
![]() . (В.3)
. (В.3)
Под предположением о стационарности шума следует понимать, что дисперсия фонового шума является постоянной во времени. Тогда формулу (B.1) можно записать в виде:
![]() . (В.4)
. (В.4)
Учитывая определение автоковариации [формула (5)], из (B.4) можно получить формулу (7).
Приложение С
(справочное)
Обоснование формул (14)-(16)
Основное предположение при выводе формул (14)-(16) состоит в том, что случайные величины белого шума являются статистически независимыми:
![]()
(С.1)
![]()
(С.2)
![]()
(С.3)
![]()
(С.4)
![]() , (С.5)
, (С.5)
где формула (С.5) справедлива при любом условии. Все расчеты в данном приложении сделаны для наклонной базовой линии, но для горизонтальной базовой линии они также справедливы.
Угловой коэффициент наклонной базовой линии, связывающий нулевую точку (=0) и точку
, равен
![]() . Поэтому значения на краях области объединения можно записать в виде
. Поэтому значения на краях области объединения можно записать в виде
![]() в точке (k
в точке (k+1), (C.6)
![]() в точке
в точке , (С.7)
где значения определяют по формуле (9). Площадь трапеции, образованной наклонной базовой линией, горизонтальной и вертикальными линиями (см. рисунок 4) равна:
![]() , (С.8)
, (С.8)
где определяют по формуле (16). Формула (11) для шума принимает вид:
 , (С.9)
, (С.9)
где из формулы (11) предполагается равным единице. Дисперсия формулы (С.9) является искомым уравнением (формула (15)).
Сумма Марковского процесса выбрана в качестве простого примера измеряемой площади. Если =0, то Марковский процесс, определенный формулой (4), также принимает вид:
![]() . (С.10)
. (С.10)
![]() . (C.11)
. (C.11)
![]() . (С.12)
. (С.12)
Сумму Марковского процесса можно записать в виде:
![]() . (С.13)
. (С.13)
По определению ![]() , среднее формулы (С.13) равно нулю, но ее дисперсия является конечной величиной:
, среднее формулы (С.13) равно нулю, но ее дисперсия является конечной величиной:
 (С.14)
(С.14)
Тогда уравнение принимает простой вид
 . (С.15)
. (С.15)
Замена k нa ![]() в формуле (С.15) дает второй член формулы (15). Первый член формулы (15) представляет собой сумму белого шума в точке
в формуле (С.15) дает второй член формулы (15). Первый член формулы (15) представляет собой сумму белого шума в точке ![]() . Другие члены формулы (15) могут быть получены на основе рассмотрения формул (С.1)-(С.5) и (С.9)-(С.15) (см. [7]). Кроме того,
. Другие члены формулы (15) могут быть получены на основе рассмотрения формул (С.1)-(С.5) и (С.9)-(С.15) (см. [7]). Кроме того, ![]() 0 в предположении, что
0 в предположении, что ![]() 0 и
0 и ![]() 0.
0.
Неопределенность, связанная с установкой нуля, может быть получена аналогичным способом (см. [8]). Нулевой уровень определен здесь как среднее арифметическое b последовательных данных:
![]() , (С.16)
, (С.16)
где определяют по формуле (9). Установка нуля означает, что коррекция фонового шума сделана по всей области объединения сигнала и шума, создавая следующую область в области объединения:
![]() . (С.17)
. (С.17)
Поэтому, неопределенность, связанная с установкой нуля, имеет вид:
![]() , (С.18)
, (С.18)
где ![]() 0 по определению. Если формулу (С.13) использовать вместо
0 по определению. Если формулу (С.13) использовать вместо ![]() в формуле (С.16), полученное выражение соответствует второму члену формулы (14) (см. [8]). Первый член формулы (14) характеризует влияние белого шума.
в формуле (С.16), полученное выражение соответствует второму члену формулы (14) (см. [8]). Первый член формулы (14) характеризует влияние белого шума.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 11843-1:1997 | IDT | ГОСТ Р ИСО 11843-1-2007 "Статистические методы. Способность обнаружения. Часть 1. Термины и определения" |
ISO 11843-2:2000 | IDT | ГОСТ Р ИСО 11843-2-2007 "Статистические методы. Способность обнаружения. Часть 2. Методология в случае линейной калибровки" |
ISO 11843-5:2008 | IDT | ГОСТ Р ИСО 11843-5-2012 "Статистические методы. Способность обнаружения. Часть 5. Методология в случаях линейной и нелинейной калибровки" |
ISO 3534-1 | - | * |
ISO 3534-2 | - | * |
ISO 3534-3 | - | * |
ISO 5725-1 | IDT | ГОСТ Р ИСО 5725-1-2002 "Точность (правильность и прецизионность) методов и результатов измерений. Часть 1. Основные положения и определения" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] Ingle J.D. Jr. and S.R.Crouch. Spectrochemical Analysis. Prentice-Hall, Inc., New Jersey, 1988
[2] Alkemade C.Th.J., W.Snelleman, G.D.Boutilier, B.D.Pollard, J.D.Winefordner, T.L.Chester and N.Omenetto. A review and tutorial discussion of noise and signal-to-noise ratios in analytical spectrometry-l. Fundamental principles of signal-to-noise ratios. Spectrochim. Acta, 33B, pp. 383-399, 1978
[3] Boutilier G.D., B.D.Pollard, J.D.Winefordner, T.L.Chester and N.Omenetto. A review and tutorial discussion of noise and signal-to-noise ratios in analytical spectrometry-lI. Fundamental principles of signal-to-noise ratios. Spectrochim. Acta, 33B, pp. 401-415, 1978
[4] Alkemade C.Th. J., W.Snelleman, G.D.Boutilier and J.D.Winefordner. A review and tutorial discussion of noise and signal-to-noise ratios in analytical spectrometry-lll. Multiplicative noises. Spectrochim. Acta, 35B, pp. 261-270, 1980
[5] Hino M. Spectral Analysis (Supekutoru Kaiseki). Asakura Shoten, Tokyo, 1982
[6] Hayas hi Y. and R.Matsuda. Deductive prediction of measurement precision from signal and noise in liquid chromatography. Anal. Chem., 66(18), pp. 2874-2881, 1994
[7] Hayas hi Y. and R.Matsuda. Prediction of precision from signal and noise measurement in liquid chromatography: Mathematical relation ship between integration domain and precision, Chromatographia, 41, pp. 75-83, 1995
[8] Рое R.B., Y.Hayas hi and R.Matsuda. Precision-optimization of wavelengths in diode-array detection in separation science. Anal. Sci., 13, pp. 951-962, 1997
[9] Kotani A., Y.Yuan, B.Yang, Y.Hayas hi, R.Matsuda and F.Kusu. Selection of the optimal solvent grade for the mobile phase in HPLC with electrochemical detection based on FUMI theory. Anal. Sci., 25, pp. 925-929, 2009
[10] Kotani A., S.Kojima, Y.Hayas hi, R.Matsuda and F.Kusu, Optimization of capillary liquid chromatography with electrochemical detection for determining femtogram levels of baicalin and baicalein on the basis of the FUMI theory. J. Pharm. Biomed. Anal., 48, pp. 780-787, 2008
УДК 658.562.012.7:65.012.122:006.354 | ОКС 03.120.30 |
Ключевые слова: измерение, отклик, стандартное состояние, базовое состояние, приведенная переменная состояния, калибровка, критическое значение отклика, ошибка первого рода | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}