ПНСТ 381-2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СИСТЕМЫ ПОМОЩИ ПРИ ПАРКОВКЕ
Технические требования и процедуры испытаний
Intelligent transport systems. Assisted parking systems (APS). Technical requirements and test procedures
ОКС 43.040.15
Срок действия с 2020-06-01
до 2023-06-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "ТранснавиСофт" (ООО "ТранснавиСофт")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 декабря 2019 г. N 58-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 16787:2017* "Интеллектуальные транспортные системы. Системы помощи при парковке (APS). Технические требования и процедуры испытаний" (ISO 16787:2017 "Intelligent transport systems - Assisted parking systems (APS) - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 127083 Москва, ул.Мишина, д.35 или в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Система помощи при парковке (APS) включает бесконтактные датчики и рулевое управление, которые помогают водителю во время парковки транспортного средства. Помощь начинается с поиска подходящего места парковки [выполняется сбор информации о пространстве вокруг транспортного средства (формируется карта окружающей среды) и рассчитывается траектория] и заканчивается поперечным управлением транспортным средством. Система APS также помогает водителю распознавать препятствия во время заезда на парковочное место.
1 Область применения
В настоящем стандарте рассматривается система помощи при парковке (APS) для транспортных средств малой грузоподъемности, таких как легковые автомобили, пикапы, легкие фургоны и спортивный транспорт (исключая мотоциклы), оснащенные системой APS. Настоящий стандарт определяет минимальные требования, предъявляемые водителями к функциональности этой системы, например обнаружение подходящих парковочных мест, расчет траекторий и поперечное управление транспортными средствами. Информирование о наличии соответствующих препятствий на пути движения транспортного средства может также являться частью функциональности таких систем. Кроме того, настоящий стандарт устанавливает минимальные требования в отношении индикации неисправностей и выполнения процедур эксплуатационных испытаний. Сформулированы правила общей информационной стратегии, при этом не ограничивается тип информации или система индикации.
Система APS предоставляет автоматическую помощь водителю во время парковки. С этой целью система APS исследует окружающее пространство вблизи транспортного средства, чтобы обнаружить подходящие парковочные места между другими припаркованными транспортными средствами или дорожную разметку (например, окрашенные линии), а также оценивает необходимую информацию для расчета траекторий припарковывания и отправляет электронному интерфейсу системы рулевого управления команды на поперечное перемещение транспортного средства во время совершения парковочного маневра.
Система APS предназначена главным образом для оказания помощи водителю при поперечном управлении транспортным средством во время совершения парковочных маневров. В качестве дополнительной возможности система APS может выполнять ограниченное продольное управление движением транспортного средства, например помогать тормозить во время заезда на парковочное место.
Настоящий стандарт содержит требования, предъявляемые к функции поперечного управления, выполняемого системой APS, и распространяется на продольное управление.
Во время совершения парковочного маневра водитель может в любой момент взять под контроль движение транспортного средства. Водитель несет полную ответственность за парковочный маневр.
Система APS использует специальные устройства, предназначенные для обнаружения объектов и определения расстояния до них, чтобы найти подходящее парковочное место. В качестве таких устройств могут использоваться датчики систем дистанционного сбора информации или получения изображений. Для расчета положения транспортного средства относительно места парковки могут использоваться не только датчики или счетчики, но и соответствующие данные, доступные в бортовой сети (например, CAN).
APS служит дополнением систем, информирующих водителя о препятствиях при выполнении парковочных маневров (например, дополнением к средствам маневрирования при движении на низкой скорости ПНСТ 339-2018*).
________________
* ПНСТ 339-2018 "Интеллектуальные транспортные системы. Средства маневрирования при движении на низкой скорости. Требования к эксплуатационным характеристикам и методы испытания".
Настоящий стандарт не охватывает системы помощи при парковке, средства помощи во время движения задним ходом и устройства обнаружения препятствий, используемые тяжелыми коммерческими транспортными средствами или транспортными средствами с прицепами.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 система помощи при парковке; APS: Система, способная измерять размеры парковочного места, вычислять подходящую траекторию, выполнять поперечное управление транспортным средством во время парковочного маневра и выдавать необходимые инструкции водителю.
2.2 режим поиска парковочного места: Режим работы, при котором система APS сканирует окружающее пространство с целью обнаружения подходящих парковочных мест.
2.3 режим помощи при парковке: Автоматическое поперечное управление (т.е. рулевое управление) транспортным средством с помощью системы APS во время совершения парковочного маневра, когда водитель контролирует скорость и направление движения транспортного средства.
2.4 активация системы: Действие, нацеленное на переключение системы из режима ожидания в активный режим.
2.5 запрос помощи водителю: Уникальное взаимодействие между водителем и пользовательским интерфейсом, которое требуется для включения системы APS перед каждым активным парковочным маневром.
2.6 звуковая информация и предупреждение: Акустический сигнал (например, импульсы, речь), используемый для представления соответствующей информации водителю.
2.7 наглядная информация и предупреждение: Оптический сигнал (например, указатель или индикатор), используемый для представления соответствующей информации водителю.
2.8 система датчиков: Компонент или набор компонентов, обнаруживающий объекты в диапазоне контроля.
2.9 объект испытаний: Изготовленный из определенного материала объект, обладающий заданной геометрией и поверхностью и предназначенный для проверки диапазона контроля.
2.10 диапазон поиска: Минимальная область, в которой система APS способна сканировать окружающее пространство с целью обнаружения подходящих парковочных мест.
2.11 условие выключения APS: Состояние, которое после активации системы вынуждает APS прервать поддержку маневрирования.
2.12 конечное состояние APS: Состояние, в котором после завершения автоматизированного парковочного маневра система APS возвращает водителю полный контроль над транспортным средством.
2.13 ограничивающее транспортное средство: Транспортное средство, ограничивающее парковочное место сзади или спереди.
2.14 транспортное средство с APS: Транспортное средство, оснащенное системой APS.
2.16 разметочная линия парковочного места: Окрашенная в яркий цвет линия на поверхности дороги, помогающая идентифицировать границу определенного парковочного места.
3 Определение типа APS и общих требований
3.1 Основная функциональность системы
Система APS выполняет поиск места, где возможна стоянка транспортного средства, определяет целевое парковочное положение и вычисляет траекторию парковки.
После этого система APS направляет транспортное средство в целевое парковочное положение, автоматически управляя рулевым механизмом во время выполнения парковочного маневра. По завершении управления положение транспортного средства относительно целевого парковочного положения должно соответствовать определенной требуемой точности.
3.2 Типы систем APS
В настоящем стандарте рассматриваются реальные системы, доступные на рынке, поскольку действия водителя во время парковки и характеристики городских парковочных мест не одинаковы для различных стран или регионов. Системы APS классифицируются на основе целевых парковочных мест следующим образом:
а) APS типа 1: система APS, целевое парковочное место которой представляет собой пространство между двумя транспортными средствами;
б) APS типа 2: система APS, целевое парковочное место которой определяется дорожной разметкой (например, окрашенными линиями).
Для систем обоих типов возможны параллельные и перпендикулярные парковочные места.
3.3 Общие требования
3.3.1 Максимальная скорость во время работы
Необходимо ограничить диапазон скорости во время автоматизированной парковки и прерывать этот режим в целях обеспечения безопасности, когда водитель превысит установленный предел. Рекомендуются следующие пределы скорости: 10 км/ч (движение вперед) и от 7 до 12 км/ч (задний ход). Однако указанные пределы скорости должны соответствовать местным нормативным требованиям, определяемым, например, внутригосударственным законодательством и/или техническими нормами.
3.3.2 Условия выключения APS
Система APS должна прервать режим помощи при парковке в случае возникновения одного или нескольких следующих условий.
а) Водитель берет под контроль транспортное средство, используя рулевое управление. Минимальный крутящий момент на рулевом колесе должен задаваться производителем оборудования. Типовое значение может приблизительно составлять 5 Н·м.
б) Существует внутренняя неисправность системы, обнаруженная APS.
в) Транспортное средство превышает предельную скорость, заданную для режима помощи при парковке (см. 3.3.1).
Система должна отключить автоматическое рулевое управление и предоставить водителю звуковую и наглядную информацию об обнаружении неисправностей.
3.3.3 Рекомендации
Система APS, описанная в настоящем стандарте, предназначена для обнаружения подходящих парковочных мест и управления транспортным средством во время совершения парковочного маневра. Рекомендуется, чтобы справочник владельца транспортного средства (руководство пользователя) содержал раздел рекомендаций, который четко указывает, как использовать систему, а также описывает критерии прерывания, ответственность водителя и ограничения системы.
Необходимо особо напомнить об ответственности водителя за безопасность во время заезда на парковочное место. Особого внимания требуют препятствия и другие возможные опасности, которые не способна обнаружить система APS. Например, водитель должен ставить транспортное средство на стоянках с перпендикулярными парковочными местами, имеющими достаточную глубину. Если система обнаруживает небезопасное состояние, водителю рекомендуется не начинать маневр или немедленно взять на себя управление движением транспортного средства.
Система APS также помогает водителю распознавать препятствия во время заезда на парковочное место. Примерами таких систем могут служить системы, описанные в стандарте ПНСТ 339-2018.
4 Функциональные и технические требования для APS типа 1
4.1 Основная функциональность системы
4.1.1 Общие положения
Система APS типа 1 должна использоваться для параллельных и/или перпендикулярных парковочных мест.
4.1.2 Параллельное парковочное место типа 1
Парковочный маневр должен выполняться для парковочного места, ограниченного двумя транспортными средствами той же модели, что и транспортное средство c APS, и необязательным бордюром, используемым в качестве поперечного ориентира. Рекомендуется предусмотреть возможность обнаружения базисного бордюра (см. рисунок 9) системой.
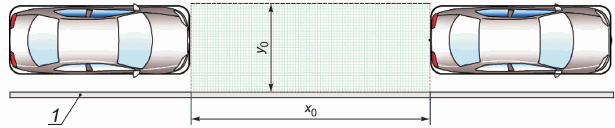 |
Рисунок 1 - Геометрия параллельного парковочного места типа 1
4.1.3 Перпендикулярное парковочное место типа 1
В качестве минимального требования парковочный маневр должен выполняться для парковочного места, ограниченного двумя транспортными средствами той же модели, что и транспортное средство c APS. Соответствие положениям настоящего стандарта может также подтверждаться с помощью разнотипных транспортных средств.
4.1.4 Последовательность операций системы APS
Для APS типа 1 см. рисунок 3.
4.1.5 Основная процедура управления APS
Для APS типа 1 см. рисунок 3.
4.1.6 Режим ожидания
APS типа 1. Если условия активации не выполняются, система APS не должна выполнять никаких действий.
4.1.7 Сканирование пространства при поиске парковочного места
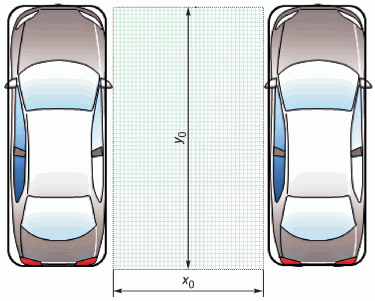 |
Рисунок 2 - Геометрия перпендикулярного парковочного места типа 1
4.1.8 Информирование водителя при обнаружении парковочного места
APS типа 1. Система должна информировать водителя об обнаружении потенциально подходящих парковочных мест. Водителю необходимо проверить парковочное место на наличие препятствий перед переходом к следующему этапу.
4.1.9 Распознавание целевого парковочного места
APS типа 1. Система APS информирует водителя о прибытии транспортного средства в место, где возможна помощь при парковке.
4.1.10 Режим помощи при парковке
Если водитель решает припарковаться в подходящем парковочном месте и останавливает транспортное средство, система APS должна предоставить водителю подсказки и задействовать рулевое управление во время совершения парковочного маневра. Способность системы поддерживать парковочный маневр будет зависеть от фактического начального положения транспортного средства с APS относительно парковочного места. Ограничения допустимых начальных положений должны описываться в руководстве по эксплуатации транспортного средства.
Активация рулевого управления не должна начинаться до остановки транспортного средства.
Водитель должен иметь возможность закончить парковочный маневр, взяв на себя поперечное управление транспортным средством с APS в любой момент времени. В этом случае система APS должна немедленно прекратить автоматическое управление рулевым механизмом.
4.1.11 Выход из режима помощи при парковке
Водитель должен информироваться о завершении или прерывании парковочного маневра.
4.1.12 Диаграмма режимов работы APS (APS типа 1)
На рисунке 3 показан пример последовательности режимов работы, соответствующая информация, предоставляемая водителю в каждом режиме работы, и требуемые действия водителя.
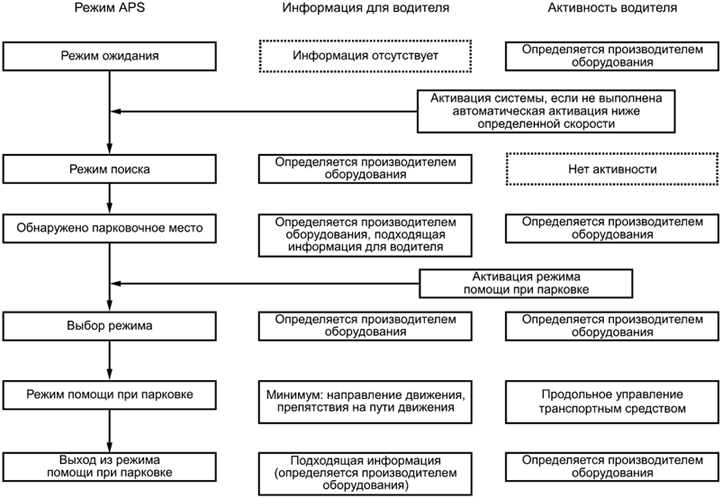 |
Рисунок 3 - Диаграмма режимов работы APS типа 1
После активации система выходит из режима ожидания, начинает поиск парковочного места, оценивает обнаруженные объекты и генерирует соответствующую обратную связь для помощи водителю.
В активном состоянии, учитывая ситуацию и действия водителя, система может переключаться между следующими состояниями: "режим поиска", "поиск парковочного места", "выбор режима" и "режим помощи при парковке".
4.2 Интерфейс водителя и информационная стратегия
4.2.1 Общие сведения о представлении информации
Система может информировать водителя об активном режиме работы (например, обнаружение парковочного места, поиск парковочного места, режим помощи при парковке, неисправность) и должна предоставлять водителю инструкции, необходимые для выполнения парковочного маневра. Как минимум система должна предоставлять водителю звуковую информацию об отключении автоматического рулевого управления после прерывания или успешного завершения парковочного маневра.
Предупреждение может выдаваться до начала автоматического вращения рулевого колеса.
4.2.2 Информация в режиме поиска парковочного места
Производитель транспортного средства определяет, какую информацию система APS предоставляет водителю в режиме поиска парковочного места.
4.2.3 Информация в режиме поиска парковочного места до начала помощи при парковке
Водитель должен быть проинформирован о подходящих парковочных местах, найденных системой APS.
Производитель транспортного средства предопределяет, какая информация предоставляется водителю при обнаружении подходящего парковочного места до перехода в режим помощи при парковке.
4.2.4 Запрос водителя
Производитель транспортного средства предопределяет, какие действия должен выполнить водитель, чтобы активировать поперечное управление с помощью системы APS.
Водителю может потребоваться подтверждение выбора целевого парковочного места, например, если доступно несколько возможных парковочных мест.
4.2.5 Информация в режиме помощи при парковке
Водитель должен информироваться о соблюдении всех предварительных условий для начала заезда на парковочное место и переключении системы APS в режим помощи при парковке.
В режиме помощи при парковке водителю должна предоставляться следующая информация или предупреждения:
- система должна предоставить водителю звуковую информацию после отключения автоматического рулевого управления;
- водитель должен информироваться о неисправностях, обнаруженных системой APS (см. 3.3.2).
В режиме помощи при парковке система APS может предоставлять водителю дополнительную информацию, например инструкции по переключению передач или рекомендации, связанные со скоростью движения.
4.2.6 Информация, предоставляемая во время выхода из режима помощи при парковке
Водитель должен быть проинформирован системой APS о завершении парковочного маневра и прекращении поперечного управления транспортным средством (автоматическое рулевое управление отключается во время выхода из режима помощи при парковке).
4.3 Минимальные технические требования
4.3.1 Технические требования в режиме поиска парковочного места
Если система находится в режиме поиска парковочного места, должны выполняться минимальные системные требования, указанные в таблице 1.
Таблица 1 - Минимальные требования для режима поиска парковочного места
Требование | Тип 1 (параллельно) | Тип 1 (перпендикулярно) |
Поддерживаемая скорость транспортного средства, | 30 км/ч | 20 км/ч |
Поддерживаемое поперечное расстояние до припаркованных транспортных средств | 0,5-1,5 м | 0,5-1,5 м |
Траектория движения | Прямая | Прямая |
Максимальный угол между транспортным средством с APS и соединительной линией ограничивающих транспортных средств | 5° | 5° |
4.3.2 Технические требования в режиме помощи при парковке
4.3.2.1 Общие положения
APS типа 1. Поддерживаемая максимальная скорость на протяжении некоторой части парковочного маневра должна равняться как минимум 5 км/ч. Необходимо ограничить диапазон скоростей во время автоматизированной парковки и прерывать этот режим, когда транспортное средство превысит определенный предел. Рекомендуются следующие пределы скорости: 10 км/ч (движение вперед) и 12 км/ч (задний ход). Транспортное средство должно двигаться по некоторой траектории, исключающей столкновение с объектами, обнаруженными системой APS.
4.3.2.2 Технические требования в отношении конечного положения при параллельной парковке с помощью системы APS типа 1
Примечание - В зависимости от выбора производителя транспортного средства и текущей ситуации целевые расстояния (D_r, D_) сзади и спереди до бордюра или соединительной линии могут служить внутренними параметрами системы APS. Точные значения не определены в настоящем стандарте, но задан допустимый диапазон.
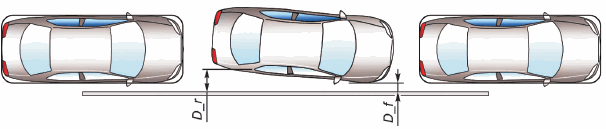 |
Рисунок 4 - Определение D_r и D_f: расстояние до бордюра относительно заднего/переднего колеса транспортного средства
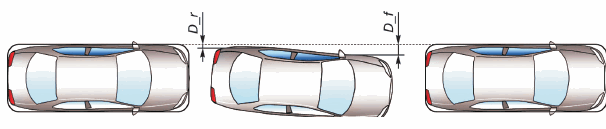 |
Рисунок 5 - Определение D_r и D_f: расстояние до соединительной линии относительно заднего/переднего колеса транспортного средства
 |
Примечание - В этом примере угол положителен.
 |
Примечание - В этом примере угол положителен.
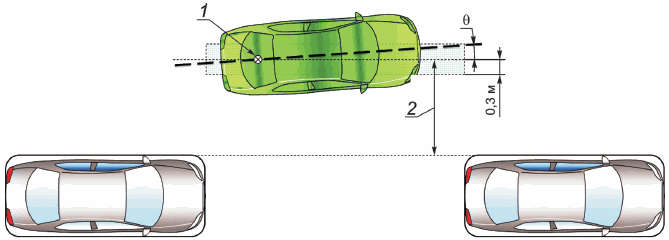
а) Требования к углу
б) Требования к расстоянию относительно опорной линии
- Расстояния (D_r, D_f) относительно бордюра должны находиться в диапазоне от 0,05 до 0,3 м (см. рисунок 4), а расстояния (D_r, D_f) относительно соединительной линии определяются производителем транспортного средства и зависят от фактической ширины транспортного средства с APS (см. рисунок 5).
4.3.2.3 Технические требования в отношении конечного положения при перпендикулярной парковке с помощью системы APS типа 1
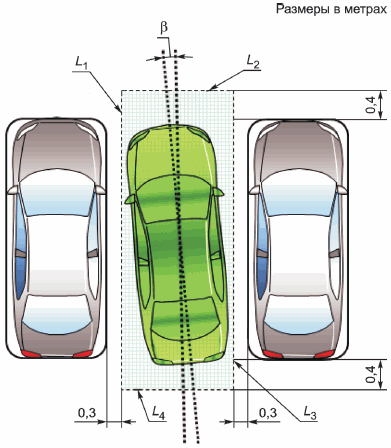
В конечном положении контур транспортного средства с APS, проецируемый на поверхность дороги без учета боковых зеркал заднего вида, должен полностью находиться внутри целевой области.
 |
4.4 Требования, предъявляемые к проверке эксплуатационных характеристик (APS типа 1)
4.4.1 Объекты испытаний
Объект испытания должен соответствовать реальным ситуациям, поэтому рекомендуется парковаться между двумя транспортными средствами того же типа, что и испытываемое транспортное средство.
Форма базисного бордюра, который должен использоваться для испытаний, показана на рисунке 9.
 |
1 - наружная сторона бордюра; 2 - дорога
Рисунок 9 - Форма базисного бордюра
4.4.2 Условия окружающей среды (общие положения)
Во время испытаний скорость ветра не должна превышать 5,4 м/с (сила ветра 3). Температура должна находиться в диапазоне от +5°С до +30°С, при этом осадки отсутствуют (например, дождь, снег с дождем, снег и т.д.). Испытания должны проводиться на ровной сухой поверхности. Стены, вспомогательное испытательное оборудование и прочие посторонние объекты должны отсутствовать в области проведения испытаний, чтобы исключить помехи, обусловленные отраженными сигналами (ультразвуковые и/или электромагнитные).
Проведение испытаний на соответствие требованиям настоящего стандарта также допускается в тех случаях, когда реальные условия окружающей среды отличаются от вышеуказанных условий. Однако при возникновении неисправностей системы испытание должно повторяться в вышеуказанных условиях, чтобы подтвердить соответствие.
4.4.3 Критерии прохождения испытаний
В рамках настоящего стандарта рассматриваются только характеристики системы, касающиеся автоматизированной парковки. Испытания, описанные в ПНСТ 339-2018, не учитываются настоящим стандартом.
Главным критерием испытания системы APS служит конечное положение транспортного средства на парковочном месте.
4.4.4 Испытания на поиск парковочного места
Испытания должны проводиться на одной заданной скорости транспортного средства для одного поперечного расстояния и определенных углов относительно припаркованных транспортных средств (см. таблицу 2) с учетом диапазонов, указанных в 4.3.1. Необходимо провести десять испытаний. Парковочное место должно обнаруживаться не менее девяти раз.
Таблица 2 - Условия проведения испытания на поиск парковочного места
Параметры | Тип 1 (параллельно) | Тип 1 (перпендикулярно) |
Скорость транспортного средства | (27,5±2,5) км/ч | (17,5±2,5) км/ч |
Поперечное расстояние | (1,20±0,30) м | (1,00±0,30) м |
Траектория движения во время испытания на поиск парковочного места | Прямая | Прямая |
Угол между транспортным средством с APS и соединительной линией ограничивающих транспортных средств во время испытания на поиск парковочного места | 4°±1° | 0°±1° |
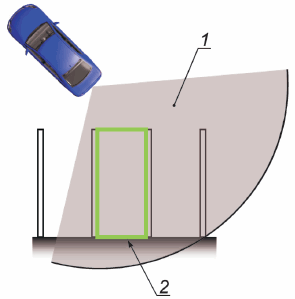
 |
Контрольная точка, расположенная посередине задней оси, должна находиться внутри области, показанной на рисунке 10.
4.4.5 Проверка поддерживаемой скорости во время автоматизированной парковки
С момента начала маневра и до заезда на парковочное место должна поддерживаться минимальная скорость от 4,0 до 5,0 км/ч.
4.4.6 Проверка конечного положения
Для проверки конечного положения транспортного средства с APS необходимо провести десять последовательных испытаний, используя одно и то же парковочное место. Девять из десяти испытаний должны оказаться успешными. Успешное испытание охватывает всю последовательность режимов системы APS (начиная с режима поиска парковочного места).
Параллельная парковка с помощью APS типа 1.
а) Требования к углу:
б) Требования к расстоянию относительно опорной линии:
- средние расстояния (D_r, D_f) относительно бордюра должны находиться в диапазоне от 0,05 до 0,3 м, а расстояния (D_r, D_f) относительно соединительной линии должны находиться в диапазоне, указанном производителем транспортного средства.
Производитель транспортного средства может выбирать целевое расстояние из этого диапазона.
Стандартное отклонение расстояний D_r, D_f не должно превышать 0,1 м.
Перпендикулярная парковка с помощью системы APS типа 1.
Требования:
- транспортное средство с APS должно полностью располагаться внутри целевой области;
5 Функциональные и технические требования APS типа 2
5.1 Основная функциональность системы
5.1.1 Основная функциональность
Система APS выполняет поиск парковочного места, пригодного для стоянки транспортного средства. Поиск выполняется на основе дорожной разметки (например, окрашенные линии на поверхности дороги), позволяющей определить целевое парковочное место и рассчитать траекторию (см. рисунок 11).
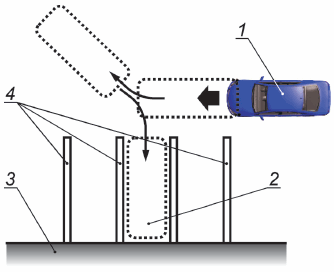 |
1 - транспортное средство APS; 2 - целевое парковочное место; 3 - обочина дороги, бордюр и т.д.; 4 - линии парковочного места
Рисунок 11 - Пример заезда на перпендикулярное парковочное место
Система APS направляет транспортное средство в целевое парковочное место, автоматически управляя рулевым механизмом во время выполнения парковочного маневра. После завершения управления положение транспортного средства в целевом парковочном месте должно соответствовать определенной требуемой точности.
Настоящий стандарт регламентирует только области, где разрешено управление с помощью APS. Целевое парковочное место и зоны ограниченного движения показаны на рисунках 12 и 13. В настоящем стандарте не рассматриваются методы распознавания/указания маршрута или ограничения на количество движений в прямом и обратном направлении (как при повороте в три приема), используемых для парковки.
Система APS предназначена главным образом для оказания помощи водителю при поперечном управлении транспортным средством во время совершения парковочных маневров. Однако существует вероятность расширения области автоматического управления в будущем.
5.1.2 Требования, предъявляемые к геометрии
Транспортное средство не должно заезжать в области ограниченного движения при выполнении автоматизированной парковки.
На рисунках 12 и 13 показаны примеры геометрии окружающей обстановки, которую необходимо учитывать на этапе проектирования системы. Транспортное средство с APS должно оставаться внутри области, где разрешено управление APS (см. рисунки 12, 13). Кроме того, важно сообщить пользователям о том, как система помогает выполнять парковочный маневр, и указать ее предельные технические характеристики. Руководство пользователя транспортного средства должно содержать, как минимум, описание работы системы и возможных помех со стороны окружающих объектов.
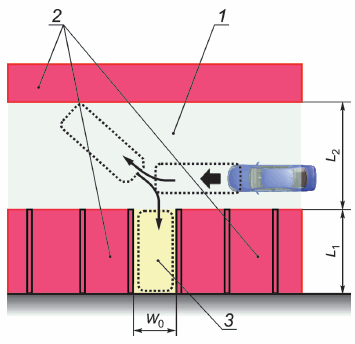 |
Рисунок 12 - Необходимый диапазон управления APS для перпендикулярной парковки
5.1.3 Диаграмма режимов работы APS (APS типа 2)
На рисунке 14 показан пример последовательности режимов работы и соответствующая информация, предоставляемая водителю в каждом режиме работы. Для каждого режима описываются действия водителя, необходимые в соответствующем режиме.
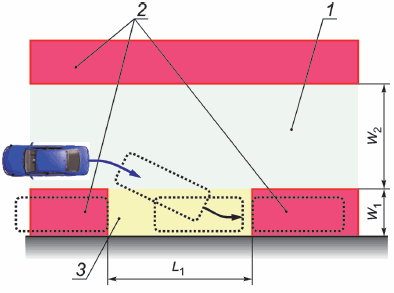 |
Рисунок 13 - Необходимый диапазон управления APS для параллельной парковки
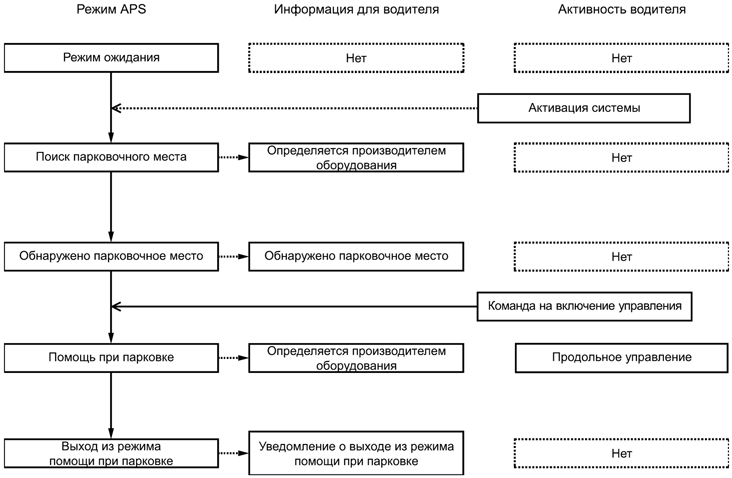 |
Рисунок 14 - Диаграмма режимов работы APS типа 2
Активация системы может выполняться автоматически. В режиме поиска парковочного места должна предоставляться информация о местоположении парковочного места, которое будет выбрано водителем.
5.2 Интерфейс водителя и информационная стратегия
5.2.1 Процедура управления
Началом управления APS считается момент времени, когда водитель подает системе команду на маневрирование транспортным средством в направлении целевого парковочного места, обнаруженного датчиками. Производитель транспортного средства должен сформулировать требования к функции поиска целевого парковочного места, поскольку она зависит от конструкции системы (например, количество, положение и характеристики бортовых датчиковых устройств). Например, водитель должен направлять автомобиль вручную в место, откуда бортовой датчик может обнаружить целевое парковочное место, если в задней части автомобиля установлен только один датчик. Однако наличие дополнительных датчиков сбоку и спереди транспортного средства позволяет системе начать работу раньше и сканировать более широкую область.
Настоящий стандарт содержит требования, предъявляемые к системе с минимальной конфигурацией.
5.2.2 Основная процедура управления APS
Водитель активирует систему после того, как транспортное средство прибывает в место, где можно инициировать управление с помощью APS согласно руководству пользователя или аналогичному документу.
Система APS информирует водителя о целевом парковочном положении через пользовательский интерфейс (например, дисплей).
APS начинает управлять маневрированием транспортного средства в направлении целевого парковочного места после определенного действия водителя, такого как изменения положения рычага переключения передач или нажатия командного переключателя.
APS должна своевременно предоставлять водителю основные инструкции и необходимые предупреждения и информировать о завершении работы APS.
Пример типичной процедуры управления описан в приложении А.
5.3 Минимальные технические требования
5.3.1 Размеченное парковочное место
5.3.1.1 Перпендикулярная парковка
На рисунке 15 для стандартного парковочного места показан минимальный набор элементов, которые определяются окрашенными линиями и используются системой в качестве ориентира.
 |
Примечания:
2 Парковочное место должно иметь как минимум плоскую асфальтированную поверхность.
Рисунок 15 - Геометрия размеченного перпендикулярного парковочного места
5.3.1.2 Параллельная парковка
На рисунке 16 для стандартного параллельного парковочного места показан минимальный набор элементов, которые определяются окрашенными линиями и используются системой в качестве ориентира.
 |
Рисунок 16 - Геометрия размеченного параллельного парковочного места
5.3.2 Распознавание целевого парковочного места
После прибытия в положение начала выполнения автоматизированной парковки система должна распознать целевое парковочное место и уведомить водителя о результатах. Способ уведомления не рассматривается в настоящем стандарте.
Минимальные требования к освещенности на распознаваемом парковочном месте 100 лк или больше (предполагается, что будут использоваться внутренние парковочные места).
Для успешного распознавания рекомендуется, чтобы соотношение яркостного контраста между линиями парковочного места и поверхностью дороги равнялось как минимум 5:1. Величина яркостного контраста определяется по формуле:
5.3.3 Максимальная скорость во время работы
См. 3.3.1.
5.3.4 Технические требования для конечного положения
5.3.4.1 Перпендикулярная парковка
Транспортное средство с APS должно располагаться в пределах целевого парковочного места, показанного на рисунке 17. Максимальный допуск углового смещения относительно парковочного места показан на рисунке 18.
 |
Рисунок 17 - Геометрия целевой области конечного положения на перпендикулярном парковочном месте при использовании APS типа 2
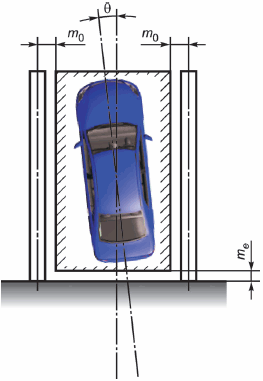 |
Рисунок 18 - Геометрия границ перпендикулярного парковочного места при использовании APS типа 2
5.3.4.2 Параллельная парковка
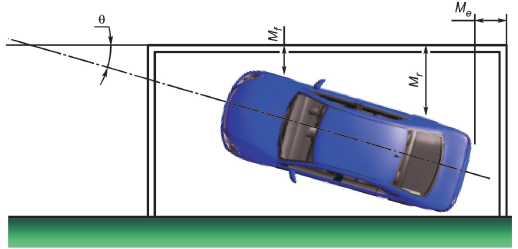 |
Рисунок 19 - Геометрия границ параллельного парковочного места при использовании APS типа 2
5.4 Требования к эксплуатационным испытаниям
5.4.1 Условия проведения эксплуатационных испытаний
Освещенность целевого парковочного места должна равняться 100 лк или более.
Соотношение яркостного контраста между окрашенными линиями и поверхностью дороги должно составлять как минимум 5:1.
5.4.2 Испытание на распознавание парковочных мест
5.4.2.1 Общие положения
Парковочные места должны располагаться на ровной асфальтированной или бетонной дорожной поверхности.
Типичные размеры испытательных парковочных мест для перпендикулярной и параллельной парковки указаны соответственно на рисунках 17 и 18.
5.4.2.2 Перпендикулярная парковка
Эффективность распознавания парковочных мест необходимо проверять для стандартного парковочного места, показанного на рисунке 17.
Типичные размеры испытательного парковочного места определены на рисунке 20. Такие размеры могут использоваться производителями транспортных средств для выбора относительного положения транспортного средства во время проведения испытаний.
 |
Рисунок 20 - Геометрия испытательного перпендикулярного парковочного места при использовании APS типа 2
5.4.2.3 Параллельная парковка
Эффективность распознавания парковочных мест необходимо проверять для стандартного парковочного места, показанного на рисунке 21.
Типичные размеры испытательного парковочного места определены на рисунке 21. Такие размеры могут использоваться производителями транспортных средств для выбора относительного положения транспортного средства во время проведения испытаний.
 |
Рисунок 21 - Геометрия испытательного параллельного парковочного места при использовании APS типа 2
5.4.3 Условия окружающей среды (общие положения)
Во время проведения испытаний должны отсутствовать осадки (например, дождь, снег с дождем, снег и т.д.). Испытания должны проводиться на ровной сухой поверхности. Стены, вспомогательное испытательное оборудование и прочие посторонние объекты должны отсутствовать в области проведения испытаний, чтобы исключить помехи, обусловленные отраженными сигналами (ультразвуковые и/или электромагнитные). Никакая дополнительная разметка дорожной поверхности, кроме линий разграничения парковочных мест, не допускается. Необходимо убрать все объекты, которые могут мешать распознаванию изображений.
5.4.4 Критерии прохождения испытаний
В рамках настоящего стандарта рассматриваются только характеристики системы, касающиеся автоматизированной парковки. Главным критерием испытания системы APS служит конечное положение транспортного средства на парковочном месте.
5.4.5 Проверка конечного положения
5.4.5.1 Общие положения
Следует оценить положение транспортного средства после завершения автоматизированной парковки.
5.4.5.2 Перпендикулярная парковка
Контрольными точками транспортного средства для определения поперечных зазоров служат самые крайние точки внешнего контакта шин с землей, а при определении продольного зазора используется самая крайняя точка задней части кузова транспортного средства.
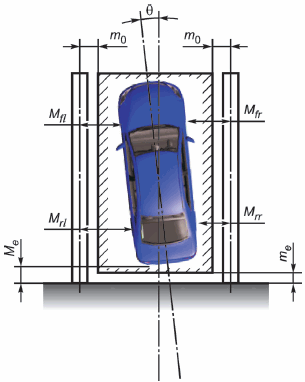 |
Рисунок 22 - Геометрия перпендикулярного парковочного места для проверки конечного положения при использовании APS типа 2
5.4.5.3 Параллельная парковка
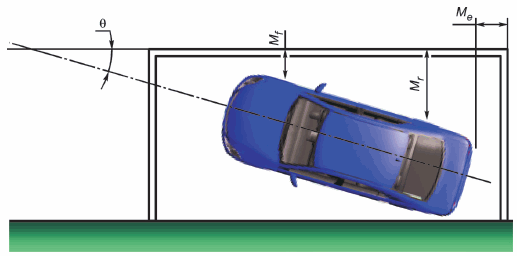 |
Рисунок 23 - Геометрия параллельного парковочного места для проверки конечного положения при использовании APS типа 2
Приложение A
(справочное)
Пример последовательности операций системы APS
Система APS функционирует в рамках следующей последовательности операций.
а) Позиционирование транспортного средства:
 |
Рисунок А.1 - Позиционирование транспортного средства относительно перпендикулярного парковочного места
б) Включение системы:
- система должна иметь главный выключатель, подконтрольный водителю. После переключения главного выключателя в положение включения системы и выбора режима помощи при парковке должна выполняться определенная последовательность операций;
- переключение главного выключателя в положение выключения должно приводить к полному отключению системы APS.
в) Обнаружение парковочного места:
- APS обнаруживает место, где возможна стоянка транспортного средства (например, на изображение линий разметки парковочного места, обнаруженных видеодатчиком, накладывается сетка (рамка)).
 |
1 - обнаруженное целевое парковочное место; 2 - поле зрения датчика
Рисунок А.2 - Обнаружение целевого перпендикулярного парковочного места
Метод наложения (например, вид сверху с транспортного средства или прямое представление изображения, полученного от видеодатчика) зависит от изготовителя и не имеет ограничений.
 |
1 - обнаруженное целевое парковочное место
Рисунок А.3 - Пример вида сверху
 |
1 - обнаруженное целевое парковочное место
Рисунок А.4 - Пример изображения, передаваемого видеодатчиком
г) Подтверждение водителем выбора целевого парковочного места:
- система должна информировать водителя об обнаружении подходящих парковочных мест;
- водителю необходимо подтвердить начало управления перед движением транспортного средства в направлении целевого парковочного места, обнаруженного системой или выбранного водителем.
д) Автоматизированная парковка:
- если водитель решает припарковаться в обнаруженном подходящем парковочном месте и останавливает транспортное средство, система APS должна предоставить водителю советы и задействовать рулевое управление во время совершения парковочного маневра;
- водитель может получить предупреждение о необходимости соблюдения осторожности во время вращения рулевого колеса, выполняемого системой автоматического управления;
- способность системы поддерживать парковочный маневр будет зависеть от фактического начального положения транспортного средства APS относительно парковочного места. Ограничения допустимых начальных положений должны описываться в руководстве по эксплуатации транспортного средства;
- активация рулевого управления не должна начинаться до остановки транспортного средства;
- водитель должен иметь возможность взять на себя поперечное управление транспортным средством c APS в любой момент времени. В этом случае система APS должна немедленно прекратить автоматическое управление рулевым механизмом.
е) Выход из режима помощи при парковке:
- водитель должен информироваться о завершении или прерывании парковочного маневра.
УДК 629.3.018.7:006.354 | ОКС 43.040.15 |
Ключевые слова: интеллектуальные транспортные системы, транспортное средство, системы помощи при парковке, процедуры испытаний | |
{kind=link}