ГОСТ Р ИСО 22178-2016
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
НИЗКОСКОРОСТНЫЕ СИСТЕМЫ СЛЕЖЕНИЯ
Требования к эксплуатации и процедуре испытаний
Intelligent transport systems. Low speed following systems. Performance requirements and test procedures
ОКС 43.040.15
Дата введения 2017-06-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Московский автомобильно-дорожный государственный технический университет" (МАДИ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 24 октября 2016 г. N 1493-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 22178:2009* "Интеллектуальные транспортные системы. Низкоскоростные системы слежения (LSF). Требования к эксплуатации и процедуре испытаний" (ISO 22178:2009 "Intelligent transport systems - Low speed following (LSF) systems - Performance requirements and test procedures", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ИСО 22178 разработан Техническим комитетом ИСО/ТК 204 "Интеллектуальные транспортные системы".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
ИСО - это всемирная федерация национальных органов по стандартизации (членов ИСО). Работа по подготовке международных стандартов обычно выполняется техническими комитетами ИСО. Каждая организация - член ИСО, заинтересованная в предмете, для которого создается технический комитет, имеет право на представительство в этом комитете. В сотрудничестве с ИСО в этой работе также принимают участие международные организации, правительственные и неправительственные. ИСО тесно сотрудничает с Международной электротехнической комиссией по всем вопросам стандартизации электротехнического оборудования.
Международные стандарты составляются в соответствии с правилами, предписанными частью 2 директив ИСО/МЭК.
Главная задача технических комитетов - подготовка международных стандартов. Проекты международных стандартов, принятых техническими комитетами, рассылаются членам ИСО для голосования. Для публикации в качестве международного стандарта необходимо одобрение не менее чем 75% участников голосования.
Особое внимание уделяется возможности того, что какие-либо составные части данного документа могут оказаться предметом патентного законодательства. ИСО не может нести ответственность за идентификацию всех или каких-либо патентных прав.
Документ ИСО/ISO 22178 был подготовлен Техническим комитетом ИСО/ТС 204 "Интеллектуальные транспортные системы".
Основным назначением системы низкоскоростного слежения является управление скоростью автомобиля путем адаптации к движению впереди идущего автомобиля с помощью информации:
1 - о дистанции до впереди идущих автомобилей;
2 - о движении управляемого автомобиля (оснащенного системой LSF);
3 - об управляющих воздействиях со стороны водителя (см. рисунок 1. Функциональные элементы системы LSF). Исходя из полученной информации, система управления (изображенная как "стратегия управления LSF" на рисунке 1) выдает команды на приводные устройства для реализации стратегии управления движением в продольном направлении, а также передает информацию о состоянии водителю.
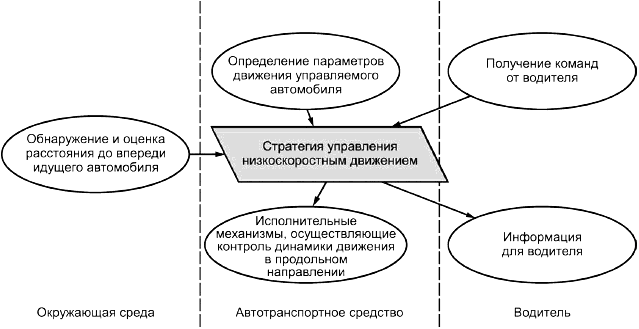
Рисунок 1 - Функциональные элементы системы LSF
Назначение системы LSF - частичная автоматизация управления движением автомобиля в продольном направлении для сокращения нагрузки на водителя.
Настоящий стандарт может использоваться в качестве стандарта системного уровня для других стандартов, которые дополняют LSF более подробными стандартами, например для концепций специфических датчиков обнаружения и измерения дистанции или для более высоких уровней функциональности. Таким образом, проблемы наподобие специальных требований к работе датчиков обнаружения и измерения дальности и организации связи для взаимодействующих систем здесь не рассматриваются.
1 Область применения
В настоящем стандарте описаны базовая стратегия управления, минимальные функциональные требования, основные элементы интерфейса водителя, минимальные требования к диагностике и реакции на отказы, а также процедуры проверки эксплуатационных характеристик для низкоскоростных систем слежения.
Система LSF предназначена прежде всего для снижения нагрузки на водителя при постоянных повторных нажатиях на педали акселератора и тормоза при заторе в уличном движении для поддержания необходимой дистанции следования за впереди идущим автомобилем в течение относительно продолжительных интервалов движения в отсутствие объектов, таких как пешеходы и мотоциклисты, которые способны прервать поток автоматизированного движения.
Система LSF обеспечивает автоматическое следование за другим автомобилем на низкой скорости с помощью механизма интерфейса водителя и системы настройки скорости движения. Система LSF не предназначена для обычного управления регулированием скорости.
2 Нормативные ссылки
В настоящем стандарте использована ссылка на следующий международный стандарт*. Для недатированных ссылок применяют последнее издание ссылочного документа (включая все его изменения).
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 2575, Road vehicles - Symbols for controls, indicators and tell-tales (Транспорт дорожный. Символы для органов управления, индикаторов и сигнальных устройств).
3 Термины и определения
_______________
Определения даны в соответствии с глоссарием ИСО/ТК 204/WG 14.
В настоящем стандарте применены следующие термины с соответствующими определениями.
3.1 дистанция: Расстояние между задней поверхностью преследуемого автомобиля и передней поверхностью управляемого автомобиля.
3.2 заторы в уличном движении: Дорожная обстановка, в которой водитель на пониженной скорости последовательно возобновляет движение, следует за впереди идущим автомобилем и останавливается, чтобы поддержать соответствующую дистанцию следования за впереди идущим автомобилем.
3.3 вытеснение: Ситуация, в которой движущееся впереди транспортное средство совершает перестроение.
3.4 движущееся впереди транспортное средство: Транспортное средство, движущееся в попутном направлении спереди управляемого LSF автомобиля.
3.5 начало движения: Действие водителя, направленное на передачу системе указания о приведении управляемого автомобиля в движение.
Пример - Нажатие на педаль акселератора и операция с переключателем для запуска управляемого автомобиля.
3.6 низкоскоростное слежение; LSF: Функциональная возможность, позволяющая управляемому автомобилю следовать за впереди идущим автомобилем на низких скоростях, например в условиях затора дорожного движения, на соответствующей дистанции путем управления двигателем и/или трансмиссией и тормозами.
3.7 режим слежения; LSF: Состояние, в котором система управляет дистанцией до впереди идущего автомобиля в соответствии с заданным интервалом времени.
3.8 режим удержания; LSF: Состояние, в котором система удерживает управляемый автомобиль неподвижно.
3.9 режим перенацеливания; LSF: Временный период потери цели во время перехода к следованию за другим впереди идущим автомобилем.
3.10 максимальная рабочая скорость: Максимальная скорость, которую система LSF может развить при управлении слежением.
3.11 минимальная рабочая скорость: Минимальная скорость, которую система LSF может поддерживать при управлении слежением.
3.12 медленно движущееся впереди транспортное средство: Движущееся впереди транспортное средство с максимальной скоростью не более 1 м/с или 10% от скорости управляемого LSF автомобиля.
3.13 неподвижный объект: Объект перед управляемым автомобилем, который неподвижен.
3.14 установившийся режим: Состояние, при котором значение предписанного параметра не изменяется в зависимости от времени, дистанции и т.п.
3.15 управляемый LSF автомобиль: Автомобиль, оснащенный системой LSF.
3.16 преследуемый автомобиль: Автомобиль, за которым следует управляемый LSF автомобиль.
3.17 временной интервал: Значение, вычисляемое как отношение дистанции с к скорости автомобиля v.
Примечание - Смотри рисунок 2.
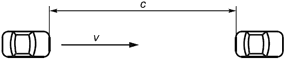
Рисунок 2 - Временной интервал
4 Обозначения и сокращения
СТТ | - коэффициент тестового макета (для инфракрасных отражателей), м |
c | - дистанция между автомобилями, м; |
- минимальная дистанция в условиях установившегося режима при любой скорости (включая режим удержания), м; | |
| - минимальная дистанция в условиях установившегося режима при скорости |
- максимальный диапазон дистанции обнаружения на прямой дороге, м; | |
- расстояние между источником излучения и площадью проецирования | |
| - дистанция, за пределами которой система не должна принимать во внимание впереди идущий автомобиль, м; |
- дистанция, в пределах которой обнаружение впереди идущего автомобиля не требуется, м; | |
- дистанция, в пределах которой не требуется ни измерение расстояния, ни определение относительной скорости, м; | |
L | - длина грани отражателя для радарного теста RADAR, м; |
R | - радиус криволинейной траектории, м; |
- минимальный радиус криволинейной траектории, м; | |
RCS | - параметр поперечного сечения, м |
- действительная скорость управляемого автомобиля относительно опорной поверхности, м/с; | |
| - скорость автомобиля на входе в криволинейную траекторию радиусом R, м/с; |
- максимальная рабочая скорость, м/с; | |
- минимальная рабочая скорость, м/с; | |
| - скорость автомобиля в конце теста, м/с; |
| - скорость автомобиля в начале теста, м/с; |
- используемая площадь, м | |
- освещаемая поверхность, м | |
- интенсивность излучения, Вт/м | |
- сила излучения, Вт/ср; | |
- сила излучения в заданном направлении, Вт/ср; | |
- длина волны, м; | |
- временной интервал между автомобилями, с; | |
- максимальный выбираемый временной интервал, с; | |
| - максимально возможный в установившемся режиме временной интервал при данной скорости |
- минимальный выбираемый временной интервал, с; | |
| - минимальный временной интервал в установившемся режиме при данной скорости |
- мощность источника излучения, Вт; | |
- излучаемая мощность, Вт; | |
- мощность падающего излучения, Вт; | |
- телесный угол, ср; | |
- телесный угол источника, ср. |
5 Классификация - типы систем LSF
В настоящем стандарте рассмотрены два типа систем LSF.
Система LSF типа 1 следует за впереди идущим автомобилем, который распознается при включении системы водителем.
Система LSF типа 2 следует за впереди идущим автомобилем, который распознается при включении системы водителем, а также автоматически перенацеливается на преследуемый автомобиль до тех пор, пока система не будет выключена.
6 Требования
6.1 Базовая стратегия управления
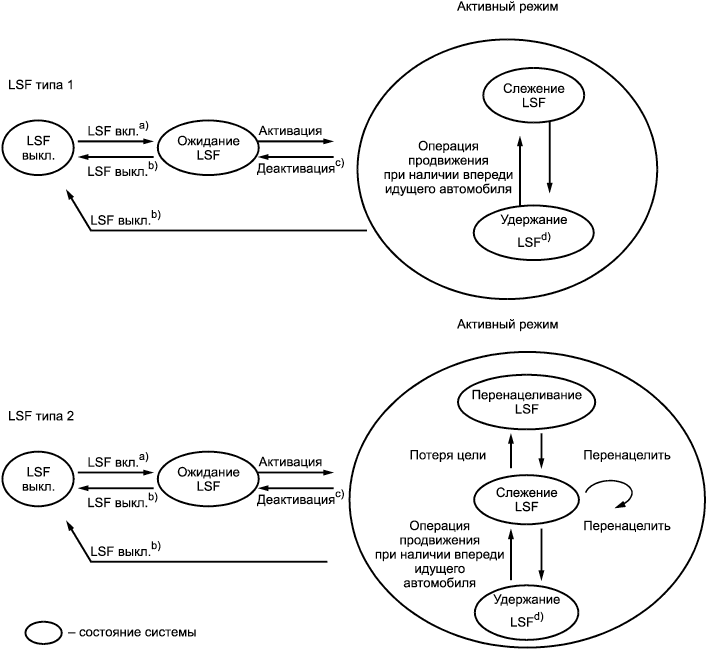
Системы LSF должны обеспечивать, как минимум, следующую стратегию управления и смены состояния (см. рисунок 3).
Следующие принципы определяют основы функционирования систем LSF:
- в режиме слежения LSF скорость автомобиля регулируется автоматически для поддержания дистанции до впереди идущего автомобиля (для обеспечения возможности следования за автомобилем, см. 6.3.2);
- (для системы LSF типа 1). В режиме слежения системы LSF новый преследуемый автомобиль будет выбираться автоматически (для обеспечения возможности автоматического перенацеливания см. 6.3.3);
- (для системы LSF типа 2). В режиме перенацеливания системы LSF управляемый автомобиль не должен ускоряться (для обеспечения возможности автоматического перенацеливания см. 6.3.3);
- после остановки управляемого автомобиля система должна перейти в режим удержания или ожидания LSF (для обеспечения условий для деактивации см. 6.3.5);
- в режиме удержания системы LSF должно выполняться автоматическое управление тормозной системой для поддержания управляемого автомобиля в неподвижном состоянии (с целью обеспечения возможности удержания см. 6.3.4).
_______________
Смена режима происходит после самодиагностики, которая выполняется в ручном режиме или автоматически.
Смена режима происходит путем выполнения ручной операции выключения системы LSF. При обнаружении какого-либо сбоя может быть активировано автоматическое выключение.
Действия водителя для деактивации системы или необходимые условия описаны в 6.3.5.
Опциональный режим.
Рисунок 3 - Режимы системы LSF и их смена
6.2 Применимые типы впереди идущих транспортных средств
6.2.1 Общие сведения
Система LSF должна рассматривать транспортные средства, движущиеся впереди, которые соответствуют условиям 6.2.2-6.2.4.
6.2.2 Обнаружение целей
Система LSF должна обнаруживать движущиеся автомобили.
Система LSF должна рассматривать остановившийся автомобиль, который отслеживался до его остановки, как преследуемый автомобиль.
Опциональной возможностью системы LSF является рассмотрение объекта, который уже остановился или замедляет скорость при его обнаружении, как преследуемый автомобиль. Если объекты, которые уже остановились или замедляют скорость, не рассматриваются системой как преследуемый автомобиль, водитель должен быть проинформирован об этом, как минимум, посредством руководства пользователя автомобиля.
6.2.3 Дальность обнаружения на прямых дорогах

1 - управляемый автомобиль; 2 - впереди идущий автомобиль; а - обнаружение автомобиля не требуется; b - требуется обнаружение автомобиля; с - требуется обнаружение автомобиля и определение расстояния
Рисунок 4 - Дальность обнаружения
Если впереди идущий автомобиль находится в пределах диапазона дистанций от до
, система LSF должна измерить расстояние между впереди идущим и управляемым автомобилями (см. рисунок 4). В пределах этого расстояния распознаваемый впереди идущий автомобиль по ширине не должен превышать ширины управляемого автомобиля.
![]() .
.
Если впереди идущий автомобиль находится на расстоянии от до
, то система LSF должна обнаружить присутствие автомобиля, но при этом не требуется ни измерения дистанции до автомобиля, ни измерения относительной скорости между впереди идущим и управляемым автомобилями. Если впереди идущий автомобиль обнаружен в пределах этого диапазона и дистанцию невозможно определить, система должна запретить автоматический разгон.
![]() .
.
Если впереди идущий автомобиль находится на расстоянии меньшем, чем , то система LSF не должна обнаруживать присутствие автомобиля.
=2 м.
6.2.4 Выбор цели
Если на прямой дороге присутствует более одного автомобиля, ближайший из этих автомобилей (см. рисунок 5) на пути управляемого автомобиля должен быть выбран как цель для контроля системой LSF в типовых ситуациях работы, как при испытании (о тестировании на выбор цели см. 7.4).
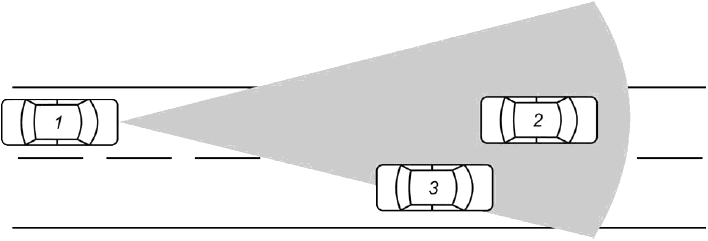
1 - управляемый автомобиль; 2 - впереди идущий автомобиль на пути следования управляемого автомобиля; 3 - впереди идущий автомобиль в соседнем ряду
Рисунок 5 - Выбор цели
Если впереди идущий автомобиль находится на расстоянии более чем ![]() , система LSF не должна рассматривать его в качестве преследуемого автомобиля (см. рисунок 6).
, система LSF не должна рассматривать его в качестве преследуемого автомобиля (см. рисунок 6).
![]()

1 - управляемый автомобиль; 2 - впереди идущий автомобиль; а - система LSF может распознать этот автомобиль как преследуемый; b - система LSF не должна распознать этот автомобиль как преследуемый
Рисунок 6 - Дистанция до преследуемого автомобиля
6.3 Функциональность
6.3.1 Условия активации
Для перехода в активное состояние должны соблюдаться следующие условия:
- система должна быть активирована водителем;
- скорость управляемого автомобиля не должна превышать максимальную рабочую скорость системы LSF;
- управляемый автомобиль должен уже обнаружить преследуемый автомобиль;
- условия деактивации отсутствуют;
- система не выявила каких-либо неполадок.
Когда управляемый автомобиль остановился, допускается переход системы LSF в режим удержания (для систем LSF с такой опцией), даже если водитель нажимает на педаль тормоза.
6.3.2 Способность следования за автомобилем
В режиме слежения LSF скорость управляемого автомобиля должна регулироваться автоматически в диапазоне от до
с целью поддержания заданного значения дистанции до преследуемого автомобиля.
Система LSF должна снижать скорость в пределах своей ограниченной способности к замедлению до при движении за останавливающимся преследуемым автомобилем, который уже распознан.
В условиях установившегося режима система LSF должна поддерживать минимальную предельную дистанцию в соответствии с 6.3.2.1.
В условиях смены режима значение дистанции может кратковременно сократиться ниже нужного значения. В этом случае система должна восстановить значение дистанции, чтобы соблюдать необходимое расстояние.
6.3.2.1 Способность к поддержанию дистанции
Интервал должен представлять собой минимальный выбираемый временной интервал для следования в условиях установившегося режима для любого значения скорости
. Интервал
![]() должен быть не менее интервала
должен быть не менее интервала , равного 1,0 с.
Дистанция должна представлять собой минимальное расстояние для следования в условиях установившегося режима для любого значения скорости
. Дистанция
![]() должна быть не менее дистанции
должна быть не менее дистанции , равной 2,0 м.
В условиях установившегося режима значение дистанции не должно быть менее MAX[,
![]() ].
].
6.3.2.2 Способность к движению по криволинейной траектории
Система LSF должна допускать следование автомобиля в условиях установившегося режима с временным интервалом по криволинейной траектории радиусом
, который должен быть не менее
, равного 125 м.
6.3.3 Способность к автоматическому перенацеливанию (только для систем LSF типа 2)
Система LSF типа 2 должна обладать способностью к автоматическому перенацеливанию для обнаружения следующего преследуемого автомобиля и смены цели слежения, как минимум, в случаях:
- встраивания перед управляемым автомобилем других автомобилей;
- вытеснения преследуемого автомобиля в другую полосу движения.
В режиме перенацеливания LSF скорость автомобиля может регулироваться.
В режиме перенацеливания LSF не должен применяться разгон автомобиля.
Режим перенацеливания LSF должен сменяться режимом слежения LSF сразу же после переключения на новый преследуемый автомобиль.
6.3.4 Способность удержания (опционально)
Система LSF с минимальной рабочей скоростью , равной 0, может обладать функцией удержания в качестве опции.
Система LSF с возможностью удержания должна автоматически переходить в режим удержания LSF, когда управляемый автомобиль останавливается.
Переход от режима удержания к режиму слежения активируется действием водителя по осуществлению начала движения автомобиля (операция продвижения) только в том случае, когда управляемый автомобиль уже обнаружил преследуемый автомобиль.
6.3.5 Условия деактивации
Система должна переходить из активного режима в режим ожидания при выполнении любого из перечисленных ниже условий:
- в режимах слежения и перенацеливания LSF торможение водителем должно деактивировать систему LSF, как минимум, в том случае, если приложенная водителем тормозная сила превышает тормозную силу, создаваемую системой LSF;
- в режимах слежения и перенацеливания система LSF должна быть деактивирована, если скорость управляемого автомобиля превышает ;
- в режимах слежения и перенацеливания системы LSF без опции удержания система должна быть деактивирована, если скорость управляемого автомобиля снижается ниже значения . Если
равно 0, система должна быть деактивирована в течение 3 с после начала остановки управляемого автомобиля;
- в режиме слежения система LSF типа 1 должна быть деактивирована, если происходит встраивание нового автомобиля, или вытеснение преследуемого автомобиля, или отсутствует преследуемый автомобиль;
- если преследуемый автомобиль приближается ближе, чем на расстояние , и больше не обнаруживается, системы LSF типов 1 и 2 должны блокировать автоматический разгон и могут продолжать торможение;
- в режиме перенацеливания система LSF типа 2 должна быть деактивирована, если длительность этого состояния превышает либо если управляемый автомобиль достигает позиции, где преследуемый автомобиль находился во время его потери.
Примечание - - это максимальное значение выбираемого временного интервала, т.е. оно соответствует значению дистанции, деленной на скорость управляемого автомобиля (>0), которая обычно используется и при которой водитель ожидает перехода к перенацеливанию;
- в режиме удержания LSF торможение водителем не обязательно должно деактивировать систему;
- в режиме удержания LSF при автоматической деактивации системы условия деактивации должны быть подробно описаны в руководстве пользователя автомобиля, и при этом должно происходить оповещение о деактивации.
6.4 Базовый интерфейс водителя и возможности вмешательства
6.4.1 Общие сведения
Система должна обеспечивать следующие возможности управления и вмешательства.
6.4.2 Элементы управления и реакция системы
6.4.2.1 Система LSF не должна приводить к значительным кратковременным сокращениям эффективности торможения как реакции на торможение водителем, даже если система LSF тормозила автоматически.
6.4.2.2 Для нагружения силового привода двигателя (например, привода дроссельной заслонки) будет использоваться большая сила из вызванного действиями водителя или работой системы LSF. Это всегда дает водителю преимущество для перехвата управления мощностью двигателя от системы LSF.
Если управляющий запрос водителя по использованию мощности двигателя превышает текущий запрос системы LSF, функция автоматического торможения должна быть заблокирована с немедленным растормаживанием (отключением тормозного усилия). Нажатие водителем педали газа не должно приводить к значительной задержке реакции системы на данное действие.
6.4.2.3 Активация автоматического торможения не должна приводить к блокировке колес на время большее, чем это позволяют антиблокировочные системы (АБС). Эта необходимость не требует наличия АБС.
6.4.2.4 Автоматическое управление системы LSF мощностью двигателя не должно приводить к чрезмерному проскальзыванию колес в продольном направлении на время большее, чем это позволяют противобуксовочные системы (ПБС). Эта необходимость не требует наличия ПБС.
6.4.2.5 Система LSF может автоматически регулировать дистанцию без участия водителя для реагирования на изменение условий движения (например, на плохую погоду). Однако при этом отрегулированное значение дистанции не должно быть меньше минимальной дистанции, заданной водителем.
6.4.2.6 Если система позволяет водителю выбрать значение дистанции и/или временного интервала, то способ выбора должен соответствовать любому из следующих условий:
a) если система сохраняет последнее выбранное значение дистанции и/или временного интервала после выключения LSF, значение дистанции и/или временного интервала должно быть отчетливо показано водителю, как минимум, во время активации системы;
b) если система не поддерживает сохранение последнего выбранного значения дистанции и/или временного интервала после выключения LSF, значение дистанции и/или временного интервала должно быть выставлено на предустановленное по умолчанию.
6.4.3 Элементы контроля
6.4.3.1 В режиме ожидания рекомендуется отображение сигнала готовности к активации, который означает, что система LSF готова к переходу из режима ожидания к активному режиму, это полезно для адаптации к управлению.
6.4.3.2 В активном режиме система LSF типа 2 должна показывать визуальное изображение обнаружения преследуемого автомобиля.
6.4.3.3 Система должна обеспечивать визуальное отображение своего активного состояния.
6.4.3.4 Если система LSF отключается или недоступна вследствие отказа, водитель должен получить информацию об этом.
6.4.4 Обозначения
Если для отображения функционирования или неисправности системы LSF используются символы, должны использоваться стандартные символы в соответствии с ИСО 2575.
6.5 Эксплуатационные пределы
Значение скорости не должно превышать 13,9 м/с.
Значение скорости не должно превышать 1,39 м/с (0
1,39 м/с).
Не должно происходить резкого прекращения торможения в случае автоматической деактивации системы LSF.
Среднее замедление автомобиля при работе автоматической системы LSF не должно превышать 3,5 м/с (усредненное значение за 2 с) при движении автомобиля со скоростью выше 20 м/с и 5 м/с
(усредненное значение за 2 с) при движении автомобиля со скоростью ниже 5 м/с (см. рисунок 7). Для систем LSF применим только диапазон скоростей автомобиля от 0 до 13,9 м/с.
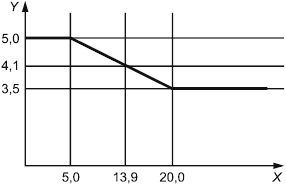
X - скорость управляемого автомобиля, м/с; Y - максимальное замедление, м/с
Рисунок 7 - Максимальное замедление
Средняя скорость изменения замедления автомобиля при работе автоматической системы LSF не должна превышать 2,5 м/с (усредненное значение за 1 с) при движении автомобиля со скоростью выше 20 м/с и 5 м/с
(усредненное значение за 1 с) при движении автомобиля со скоростью ниже 5 м/с (см. рисунок 8). Для систем LSF применим только диапазон скоростей автомобиля от 0 до 13,9 м/с.
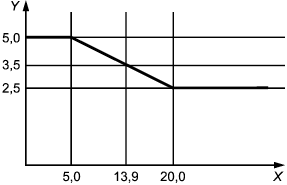
X - скорость управляемого автомобиля, м/с; Y - средняя скорость изменения замедления, м/с
Рисунок 8 - Средняя скорость изменения замедления
Среднее ускорение автомобиля при работе автоматической системы LSF не должно превышать 2 м/с (усредненное значение за 2 с) при движении автомобиля со скоростью выше 20 м/с и 4 м/с
(усредненное значение за 2 с) при движении автомобиля со скоростью ниже 5 м/с (см. рисунок 9). Для систем LSF применим только диапазон скоростей автомобиля от 0 до 13,9 м/с.
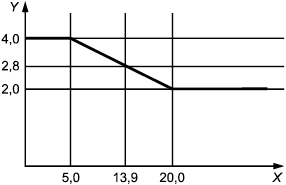
X - скорость управляемого автомобиля, м/с; Y - максимальное ускорение автоматического разгона, м/с
Рисунок 9 - Автоматическое ускорение
6.6 Включение стоп-сигналов
Если система LSF использует рабочую тормозную систему для автоматического торможения, должны включаться стоп-сигналы. Если система LSF применяет другие средства замедления, система может включать стоп-сигналы. Стоп-сигналы должны загораться в течение 350 мс после того, как система LSF начинает торможение рабочей тормозной системой. Чтобы предотвратить раздражающее мигание стоп-сигналов, они могут оставаться включенными в течение разумного интервала времени после завершения применения системой LSF торможения.
6.7 Реакции на ошибки
В таблице 1 перечислены необходимые реакции на ошибки в зависимости от того, в какой из подсистем произошел сбой.
Оповещения об ошибках, описанных в таблице 1, должны немедленно поступать к водителю. Оповещения должны продолжать выдаваться до тех пор, пока система не будет выключена.
Повторная активация системы LSF должна быть запрещена до успешного выполнения самодиагностики, которая запускается либо при выключении/включении зажигания, либо при выключении/включении системы LSF.
Таблица 1 - Реакции на ошибки LSF
Ошибка в подсистеме | Ошибки, произошедшие во время использования LSF | |
Управление тормозной системой | Управление двигателем | |
1 Двигатель | Следует выполнять торможение предписанным образом, по крайней мере, для текущего/выполняемого маневра торможения | Управление двигателем от LSF следует отменить |
2 Тормозная система | Управление тормозной системой от LSF следует отменить. | Управление двигателем от LSF следует отменить |
3 Датчик обнаружения и измерения дальности | Следует запустить стратегию контроллера, начиная с последней правильно выполненной команды на торможение. В этом случае торможение не должно резко прерваться. Система должна быть немедленно отключена после вмешательства водителя путем нажатия педали газа или тормоза или выключателя LSF | Управление двигателем от LSF следует отменить |
4 Контроллер LSF | Управление тормозной системой от LSF следует отменить | Управление двигателем от LSF следует отменить |
| ||
6.8 Взаимодействие с другими системами
При работе совместно с другими системами помощи водителю (контроля динамики движения автомобиля в продольном направлении) система LSF должна соответствовать следующим требованиям:
- должно допускаться взаимодействие с системами, которые не выполняют управление автомобилем (например, системы оповещения о столкновении с идущим впереди автомобилем - FVCWS (см. ИСО 15623));
- если система LSF типа 1 устанавливается в сочетании с системой, которая поддерживает управление разгоном и замедлением автомобиля в нормальных дорожных условиях (например, система адаптивного круиз-контроля - АСС (см. ИСО 15622)), переход между активным состоянием LSF и активным состоянием (или его эквивалентом) другой системы допустим только посредством ручного управления водителем;
- если система LSF типа 2 устанавливается в сочетании с системой, которая поддерживает управление разгоном и замедлением автомобиля в нормальных дорожных условиях (например, система адаптивного круиз-контроля - АСС (см. ИСО 15622)), водитель должен быть оповещен о том, какая из систем активна;
- при взаимодействии с системами, которые управляют предотвращением столкновений или смягчением последствий столкновения в аварийной ситуации, система LSF не должна вмешиваться в экстренную работу таких систем.
7 Методы проверки рабочих характеристик системы
7.1 Условия окружающей среды
a) Испытания должны проводиться на ровной, сухой и чистой асфальтовой или бетонной поверхности.
b) Температура окружающей среды должна быть в диапазоне от минус 20°С до плюс 40°С.
c) Диапазон видимости по горизонтали должен превышать 1 км.
7.2 Параметры тестируемого объекта
7.2.1 Общие сведения
Тестовые макеты определяются современными технологиями, принятыми к применению. Для других технологий следует пользоваться опытными образцами тестируемых объектов.
7.2.2 Инфракрасный лазерный радар (LIDAR)
Тестовый макет для инфракрасного теста характеризуется его инфракрасным показателем СТТ (коэффициент тестируемого объекта) и поперечным сечением.
Минимальное поперечное сечение тестового макета составляет 20 см.
Тестовый макет представляет собой диффузный отражатель с показателем СТТ, равным (1±0,1) м/ср.
7.2.3 Радарный тест миллиметровыми радиоволнами (RADAR)
Тестовый макет для теста RADAR характеризуется поперечным сечением радара (RCS).
В диапазоне частот от 20 до 95 ГГц значение RCS для тестового макета должно составлять 3 м.
Для значительно отличающихся диапазонов частот значение RCS подлежит определению и уточнению.
7.3 Тестирование зоны обнаружения
7.3.1 Общие сведения
О дальности обнаружения на прямых дорогах см. 6.2.3.
7.3.2 Процедура тестирования для позиций ,
и
Проекция поперечного сечения автомобиля соответствует прямоугольнику высотой 0,9 м и шириной управляемого автомобиля, начинающейся на высоте 0,2 м от опорной поверхности. Зона обнаружения состоит из различных сегментов в пределах вида автомобиля сзади. Кроме того, она ограничена минимальной высотой легкового автомобиля. Тестовый макет для тестирования позиций и
состоит из трех столбцов. Столбцы L и R имеют ширину 0,5 м каждый. Во время проведения испытаний для позиций
и
установленные отражатели должны обнаруживаться не менее чем на одной позиции в каждой из секций (L, С, R) тестового макета. Для позиции
достаточно обнаружения хотя бы одного отражателя на всей плоскости тестового макета (см. рисунок 10).
Для позиций ,
и
должен использоваться тестовый макет (см. 7.2).
Тестирование на измерение дальности должно выполняться в динамическом режиме.
Опционально может оказаться допустимым тестирование в статическом режиме.
Максимальное время обнаружения не должно превышать 2 с после появления цели.
Размеры в метрах
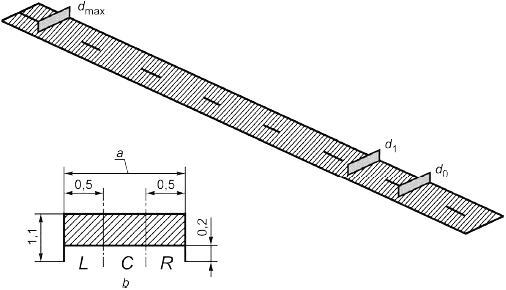
а - ширина управляемого автомобиля; b - проекция автомобиля (тестовый макет)
Рисунок 10 - Зоны обнаружения в продольном направлении
7.4 Тестирование на выбор цели
7.4.1 Общие сведения
О выборе цели см. 6.2.4.
7.4.2 Начальные условия
Два впереди идущих автомобиля одной модели движутся борт о борт друг с другом со скоростью ![]() . Расстояние между продольными осевыми линиями впереди идущих автомобилей составляет (3,5±0,25) м. Ширина впереди идущих автомобилей должна составлять от 1,4 до 2,0 м.
. Расстояние между продольными осевыми линиями впереди идущих автомобилей составляет (3,5±0,25) м. Ширина впереди идущих автомобилей должна составлять от 1,4 до 2,0 м.
Управляемый автомобиль следует за одним из впереди идущих автомобилей в состоянии установившегося режима. Впереди идущий автомобиль, за которым следует управляемый, определяется как преследуемый автомобиль. Временной интервал равен (
![]() ). Боковое смещение продольной осевой линии управляемого автомобиля относительно продольной осевой линии преследуемого автомобиля не должно превышать 0,5 м (см. рисунок 11).
). Боковое смещение продольной осевой линии управляемого автомобиля относительно продольной осевой линии преследуемого автомобиля не должно превышать 0,5 м (см. рисунок 11).
Размеры в метрах
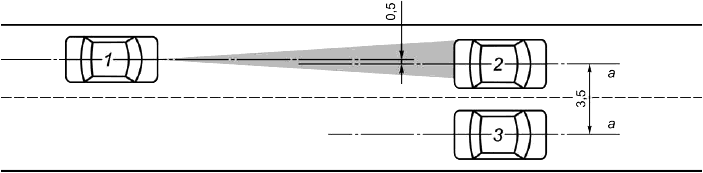
1 - управляемый автомобиль; 2 - впереди идущий автомобиль на пути следования управляемого автомобиля; 3 - впереди идущий автомобиль на соседней полосе; а - скорость каждого автомобиля, равная ![]()
Рисунок 11 - Тестирование на выбор цели (начальные условия)
7.4.3 Процедура испытания
Преследуемый автомобиль разгоняется до скорости ![]() .
.
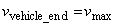
Тест считается успешно пройденным, если управляемый системой LSF автомобиль проедет мимо впереди идущего в соседней полосе автомобиля (см. рисунок 12).
 ;
;
 м/с.
м/с.
1 - управляемый автомобиль; 2 - преследуемый автомобиль; 3 - впереди идущий автомобиль в соседней полосе; а - скорость преследуемого автомобиля, равная ![]() ; b - скорость впереди идущего автомобиля в соседней полосе, равная
; b - скорость впереди идущего автомобиля в соседней полосе, равная ![]()
Рисунок 12 - Тестирование на выбор цели (конечные условия)
7.5 Тестирование автоматического торможения
7.5.1 Общие сведения
О способности к следованию за автомобилем см. 6.3.2.
7.5.2 Начальные условия
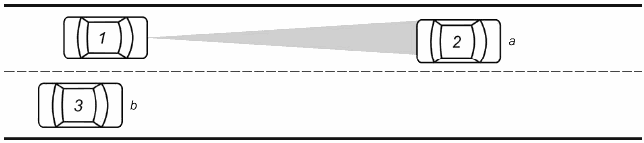
Впереди идущий автомобиль должен двигаться со скоростью (0,9, ..., 1,0)· (см. рисунок 13).
Ширина впереди идущего автомобиля должна находиться в пределах 1,4-2,0 м.
Управляемый автомобиль следует за передним в условиях установившегося режима движения.
Значение временного интервала должно быть (
).
1 - управляемый автомобиль; 2 - впереди идущий автомобиль
Рисунок 13 - Тестирование автоматического торможения (начальные условия)
7.5.3 Процедура испытания
Преследуемый автомобиль должен начать торможение до полной остановки.
Значение замедления преследуемого автомобиля должно составлять 2,0-2,5 м/с.
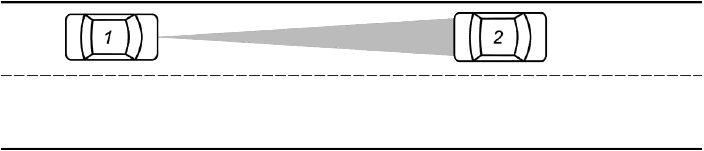
Тест считается успешно пройденным, если управляемый автомобиль под управлением системы LSF замедляется до скорости за преследуемым автомобилем (см. рисунок 14).
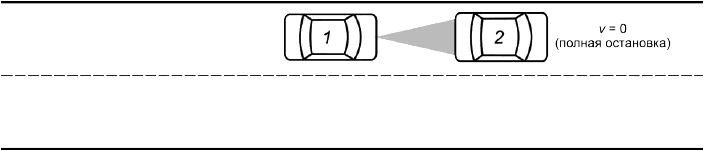
1 - управляемый автомобиль; 2 - преследуемый автомобиль
Рисунок 14 - Тестирование автоматического торможения (конечные условия)
7.6 Тестирование способности к автоматической смене траектории движения (только для систем LSF 2 типа)
7.6.1 Общие сведения
О способности к автоматической смене траектории движения смотри 6.3.3.
7.6.2 Начальные условия
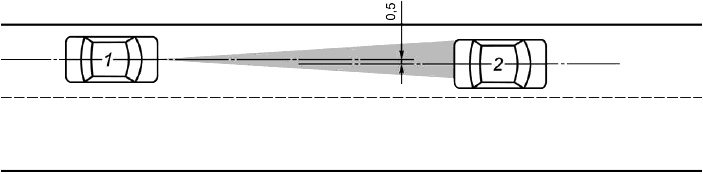
Впереди идущий автомобиль должен двигаться со скоростью (0,9, ..., 1,0)·.
Ширина впереди идущего автомобиля должна находиться в пределах 1,4-2,0 м.
Управляемый автомобиль следует за впереди идущим в условиях установившегося режима движения.
Впереди идущий автомобиль, за которым следует управляемый, считается преследуемым автомобилем.
Значение временного интервала должно быть (
).
Боковое смещение продольной осевой линии управляемого автомобиля относительно продольной осевой линии преследуемого автомобиля не должно превышать 0,5 м (см. рисунок 15).
Размер в метрах
1 - управляемый автомобиль; 2 - преследуемый автомобиль
Рисунок 15 - Тестирование способности к автоматической смене траектории движения (начальные условия)
7.6.3 Процедура испытания
Автомобиль, движущийся с низкой скоростью, должен иметь скорость 1,4-2,8 м/с.
Преследуемый автомобиль должен сменить полосу движения при обнаружении автомобиля, движущегося с низкой скоростью (см. рисунок 16).
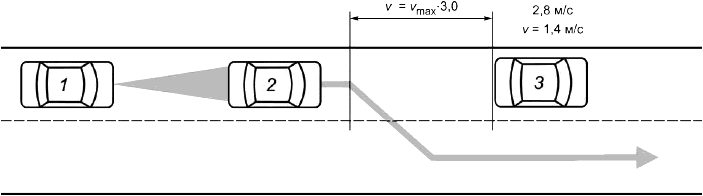
1 - управляемый автомобиль; 2 - преследуемый автомобиль; 3 - автомобиль, движущийся с низкой скоростью
Рисунок 16 - Тестирование способности к автоматической смене траектории движения (условия смены полосы)
Местоположение смены полосы движения должно определяться значением (0,9, ..., 1,0)··3.
Боковое смещение продольной осевой линии управляемого автомобиля относительно продольной осевой линии автомобиля, движущегося с низкой скоростью, не должно превышать 0,5 м.
Тест считается пройденным успешно, если управляемый системой LSF автомобиль следует за автомобилем, движущимся с низкой скоростью, на предписанной дистанции (см. рисунок 17).
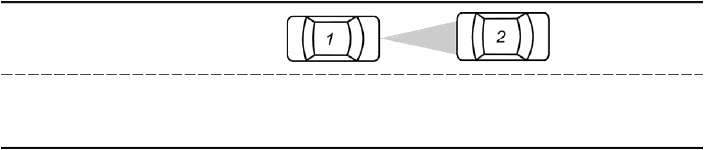
1 - управляемый автомобиль; 2 - автомобиль, движущийся с низкой скоростью
Рисунок 17 - Тестирование способности к автоматической смене траектории движения (конечные условия)
7.7 Тестирование способности следования по криволинейной траектории
7.7.1 Общие сведения
При выполнении данного теста необходимо принять во внимание геометрию дороги в сочетании с полем обзора датчика системы LSF.
Разные методы прогнозирования геометрии дороги и применения технического зрения ведут к необходимости использования сценария движения.
7.7.2 Испытательный участок
Испытательная трасса должна состоять либо из кольцевого участка дороги с постоянным радиусом, либо из достаточно длинного криволинейного участка с постоянным радиусом. Радиус должен находиться в пределах 80%-100% значения . Направление движения по трассе должно допускаться как по часовой стрелке, так и против нее. Применение дорожной разметки, барьерных ограждений и т.п. не регламентируется (см. рисунок 18).
Для систем LSF испытания следует проводить при значении , равном 125 м.
Размеры в метрах
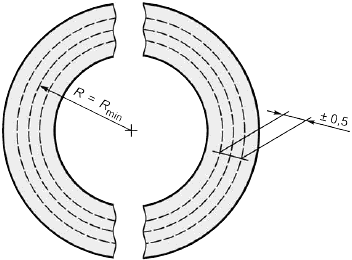
Рисунок 18 - Схема испытательного участка
7.7.3 Требования к преследуемому автомобилю
Преследуемый автомобиль должен быть оснащен тестовым макетом, описанным в 7.2. Тестовый макет должен быть закреплен посередине задней поверхности автомобиля на высоте (0,6±0,1) м над опорной поверхностью. Остающаяся открытой поверхность автомобиля должна быть покрыта аналогично задней поверхности автомобиля при снятом тестовом макете, обеспечивая поперечное сечение RCS теста RADAR не менее 0,6 м или отражательную способность не более 20% тестового макета.
7.7.4 Сценарий движения
Управляемый автомобиль движется за преследуемым автомобилем по той же траектории (боковое отклонение в пределах ±0,5 м между продольными осями обоих автомобилей) в условиях установившегося режима. Оба автомобиля должны соответствовать начальным условиям тестирования, определенным на рисунке 15 (только управляемый и преследуемый автомобили) до начала выполнения теста. Подробности испытания приведены в таблицах 2 и 3, а также на рисунке 19.
Скорость преследуемого автомобиля на момент начала теста определяется как:
![]() .
.
В соответствующий момент времени преследуемый автомобиль начинает торможение, при этом контролируется реакция управляемого автомобиля. Управляемый автомобиль должен начать снижение скорости из-за снижения дистанции до преследуемого автомобиля, прежде чем временной интервал снизится до 2/3С (см. рисунок 20).
Таблица 2 - Условия испытаний для выполнения теста на способность к движению по криволинейной траектории (преследуемый автомобиль)
Подготовка к тесту | Начальные условия теста | 1-й маневр теста | 2-й маневр теста | |
Скорость | Постоянное значение | Снижение скорости на (3,5±0,5) м/с | Постоянное значение | |
Время |
| Временной триггер 0 с | 2 с | - |
Радиус |
| Постоянное значение R (см. 7.7.2) | ||
Таблица 3 - Условия испытаний для выполнения теста на способность к движению по криволинейной траектории (управляемый автомобиль)
Подготовка к тесту | Начальные условия теста | 1-й маневр теста | 2-й маневр теста | |
Скорость | Управляется системой LSF | |||
Ускорение |
| Должно контролироваться замедление | ||
Радиус |
| Постоянное значение R (см. 7.7.2) | ||
Временной интервал до преследуемого автомобиля |
| Управляется системой LSF; должен контролироваться | ||
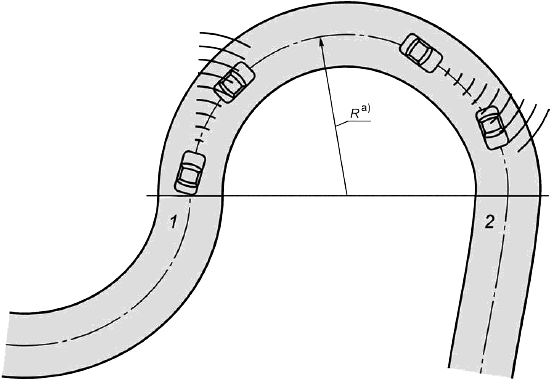
1 - начало испытания (управляемый автомобиль находится на части трассы с постоянным радиусом, а также выполняются остальные начальные условия теста); 2 - завершение испытания [управляемый автомобиль снижает скорость (положительный результат) либо временной интервал снижается до значения менее чем 2/3·]
постоянное значение
Рисунок 19 - Пример схемы испытательного участка
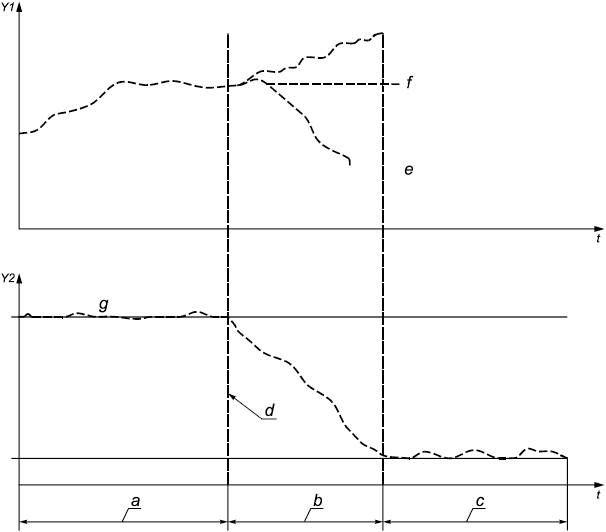
t - время испытания; Y1 - скорость управляемого автомобиля; Y2 - скорость преследуемого автомобиля; а - подготовка к тесту; b - первый маневр теста; с - второй маневр теста; d - начало теста; е - положительные результаты; f - отрицательные результаты; g - скорость преследуемого автомобиля, равная ![]() ; h - скорость преследуемого автомобиля, равная (
; h - скорость преследуемого автомобиля, равная (![]() - 3,5) м/с
- 3,5) м/с
Рисунок 20 - Графики скоростей автомобилей при проведении испытания на способность к движению по криволинейной траектории
Приложение А
(обязательное)
Техническая информация
А.1 Тест LIDAR - Коэффициент тестового макета
А.1.1 Телесный угол
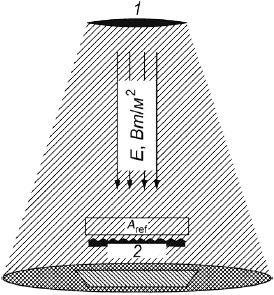
Телесный угол , ср, представляет собой отношение подвергшейся облучению освещаемой поверхности к квадрату радиуса сферы (см. рисунок А.1).
![]() ,
,
где - используемая площадь, м
;
- расстояние между источником излучения и площадью проецирования
, м;
- телесный угол источника излучения (1 ср).
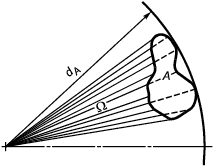
Рисунок А.1 - Телесный угол
А.1.2 Излученная интенсивность
Излученная интенсивность определяется как мощность, излученная источником
в пределах телесного угла
.
![]() ,
,
где - интенсивность, излученная в данном направлении от отражателя, измеренная перед принимающей поверхностью, Вт/ср;
- мощность излучения, Вт;
- облученный телесный угол (ср).
А.1.3 Интенсивность излучения
Интенсивность излучения - это отношение излученной мощности к площади облучаемой поверхности. представляет собой плотность излучения на облучаемой площади:
![]() ,
,
где - интенсивность излучения, Вт/м
;
- падающая излученная мощность, Вт;
- площадь облучаемой поверхности, м
.
А.1.4 Коэффициент тестового макета СТТ
Тестовый макет характеризуется коэффициентом отражения, идентичным отражательной способности грязного автомобиля без специальных отражателей:
![]() ,
,
где СТТ - коэффициент тестового макета в квадратных метрах на стерадиан, м/ср;
- интенсивность, излученная в данном направлении от отражателя, измеренная перед принимающей поверхностью, Вт/ср;
- интенсивность излучения на выходе излучателя, Вт/м
.
Отражатель (см. рисунок А.2) с заданным значением СТТ должен иметь пространственное распределение отражения 8·10
ср.

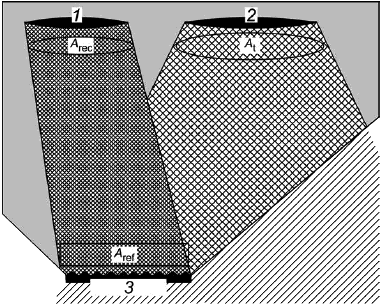
1 - приемное устройство; 2 - отражатель
Рисунок А.2 - Сценарий приема
Значение СТТ характеризует только качество отражателя (затухание). Для процедуры испытания достаточно воспользоваться уголковым отражателем (см. рисунок А.3) (сокращение поверхности до "точечного размера"). Тем не менее, можно использовать большую поверхность отражения, если общая отражательная способность поверхности не превышает упомянутого значения.
1 - излучатель; 2 - отражатель
Рисунок А.3 - Сценарий передачи
А.1.5 Размер отражателя
Необходимо определение размеров отражателя (см. рисунок А.4). Опытным путем установлено, что рефлектор Ламберта площадью приблизительно 1,7 м является идеальным решением для имитации автомобиля. В качестве другой методики можно воспользоваться "тройным" отражателем площадью приблизительно 20 см
.
1 - приемное устройство; 2 - излучатель; 3 - отражатель
Рисунок А.4 - Сценарий рефлектора
Рефлектор Ламберта отражает полную энергию внутри сферической области (см. рисунок А.5).
![]() ,
,
где - излученная мощность, Вт;
- излученная интенсивность, Вт/ср;
- телесный угол, ср.
Размер 1,7 м соответствует поперечному сечению небольшого автомобиля.
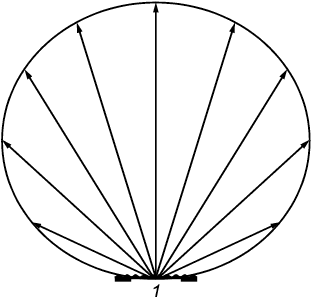
1 - отражатель
Рисунок А.5 - Отражатель Ламберта
А.2 Определение RCS тестового макета с уголковым отражателем
Тестовый макет характеризуется параметром поперечного сечения RCS.
Вид тестового макета должен соответствовать изображенному на рисунке А.6.
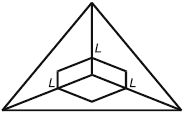
Рисунок А.6 - Уголковый отражатель
![]() ,
,
где - длина грани отражателя для теста RADAR, м;
- длина волны, м.
Приложение ДА
(справочное)
Сведение о соответствии ссылочного международного стандарта межгосударственному стандарту
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 2575 | IDT | ГОСТ ИСО 2575-2005 "Транспорт дорожный. Символы для органов управления, индикаторов и сигнальных устройств" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. | ||
Библиография
[1] ИСО 15622 | Системы информации и управления на транспорте. Адаптивные устройства для поддержания заданной скорости. Требования к эксплуатационным характеристикам и методы испытания |
[2] ИСО 15623 | Системы информации и управления на транспорте. Системы оповещения о столкновении с идущим впереди автомобилем. Требования к эксплуатационным характеристикам и методы испытания |
УДК 629.3.018.7:006.354 | ОКС 43.040.15 | |
Ключевые слова: интеллектуальные транспортные системы, ИТС, автомобиль, низкоскоростная система слежения, система LSF | ||
Электронный текст документа
и сверен по:
, 2016
{kind=link}