ГОСТ Р ИСО 15622-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СИСТЕМЫ АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ
Требования к эксплуатационным характеристикам и методы испытания
Intelligent transport systems. Adaptive cruise control systems. Performance requirements and test procedures
ОКС 43.040.15
Дата введения 2018-07-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Московский автомобильно-дорожный государственный технический университет" (МАДИ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 7 ноября 2017 г. N 1672-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 15622:2010* "Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля. Требования к эксплуатационным характеристикам и методы испытания" (ISO 15622:2010 "Intelligent transport systems - Adaptive Cruise Control systems - Performance requirements and test procedures", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ИСО 15622 разработан Техническим комитетом ИСО/ТК 204 "Интеллектуальные транспортные системы".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
ИСО (Международная организация по стандартизации) - это всемирная Федерация национальных организаций по стандартизации (комитеты - члены ИСО). Работа по подготовке международных стандартов обычно осуществляется через технические комитеты ИСО. Каждый член, заинтересованный в предмете, для которого был создан технический комитет, имеет право быть представленным в этом комитете. Международные организации, правительственные и неправительственные, имеющие связи с ИСО, также принимают участие в работе. ИСО тесно сотрудничает с Международной электротехнической комиссией (МЭК) по всем вопросам стандартизации в области электротехники.
Международные стандарты разрабатывают в соответствии с правилами, приведенными в Директивах ИСО/МЭК, часть 2.
Основная задача технических комитетов - это подготовка международных стандартов. Проекты международных стандартов, принятые техническими комитетами, рассылаются членам для голосования. Для публикации в качестве международного стандарта требуется одобрение не менее 75% организаций-членов, участвующих в голосовании.
Следует обратить внимание на возможность того, что некоторые элементы этого документа могут быть объектом патентных прав. ИСО не должна нести ответственность за идентификацию любого или всех таких патентных прав.
ИСО 15622 был подготовлен Техническим комитетом ISO/TC 204 "Интеллектуальные транспортные системы".
Это второе издание отменяет и заменяет первое издание (ИСО 15622:2002), которое было технически пересмотрено.
Основная функция системы адаптивного круиз-контроля (АСС) - это контроль скорости движения транспортного средства адаптивно по отношению к движущемуся впереди транспортному средству, используя информацию:
1 - о расстоянии до движущегося впереди транспортного средства;
2 - о движении транспортного средства, оборудованного системой АСС;
3 - о командах водителя (см. рисунок 1).
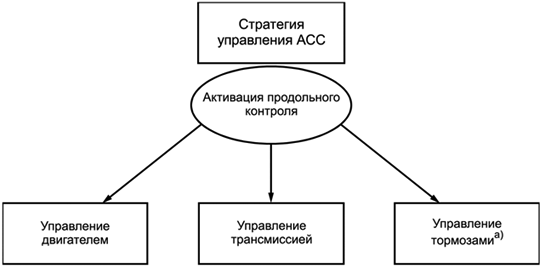
На основе полученной информации контроллер системы АСС (идентифицированный на рисунке 1 как "Стратегия управления АСС") посылает команды на исполнительные механизмы для реализации выработанной продольной стратегии управления. Он также передает информацию о состоянии системы АСС водителю.
|
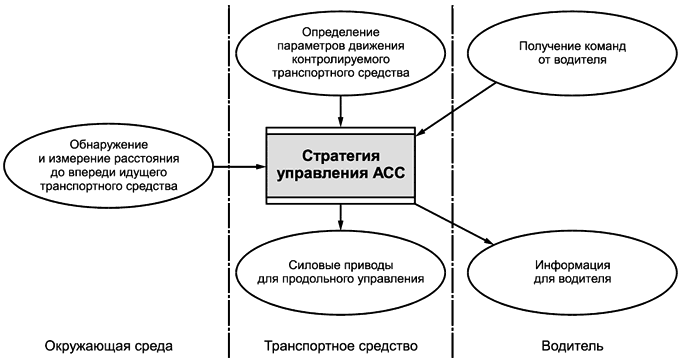
Рисунок 1 - Функциональные элементы АСС
Цель АСС - это сокращение объема работы водителя и его поддержка в удобной форме на основе частичной автоматизации процесса продольного управления транспортным средством. Этот международный стандарт может быть использован в качестве стандарта системного уровня другими стандартами, которые расширяют АСС детализацией стандарта, например для уточнения концепций датчиков или для стандартизации более высокого уровня функциональности.
Таким образом, в настоящем стандарте не рассматриваются такие вопросы, как специфические требования к функциям датчика по обнаружению и измерению расстояния до движущегося впереди транспортного средства или характеристики линий связи для кооперативных решений.
1 Область применения
Настоящий стандарт содержит основную стратегию управления, минимальные требования к функциям, основные элементы интерфейса водителя, минимальные требования по диагностике и реакции на отказ, а также процедуры тестирования эксплуатационных характеристик системы адаптивного круиз-контроля (АСС).
Адаптивный круиз-контроль предназначен для обеспечения управления продольным движением оборудованного транспортного средства при его движении по автомагистрали (дороги, где запрещено движение немоторизованных транспортных средств и пешеходов) в условиях свободного транспортного потока.
Система АСС может быть дополнена другими функциями, такими как функция предупреждения о препятствии впереди.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие документы*. Для недатированных ссылок применяют последнее издание ссылочного документа (включая все его изменения и поправки).
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 2575, Road vehicles - Symbols for controls, indicators and tell-tales (Транспорт дорожный. Символы для органов управления, индикаторов и сигнальных устройств)
UN/ECE Regulation No. 13-Н, Uniform provisions concerning the approval of passenger cars with regard to braking (Единообразные предписания, касающиеся официального утверждения легковых транспортных средств в отношении торможения)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 управление активным торможением: Функция применения тормозов, без участия водителя, в этом случае под управлением системы АСС.
3.2 адаптивный круиз-контроль: Усовершенствованная система обычного круиз-контроля [см. обычный круиз-контроль (см. 3.5)], которая позволяет оборудованному данной системой транспортному средству следовать за движущимся впереди транспортным средством (ТС) на соответствующем расстоянии, управляя двигателем, трансмиссией и, возможно, тормозами.
3.3 тормоз: Устройство, в котором силы препятствуют продолжению движения транспортного средства.
Примечание 1 - Это может быть фрикционный тормоз (когда силы возникают в результате трения между двумя частями транспортного средства, движущимися относительно друг друга); электрический тормоз (когда силы возникают в результате электромагнитного действия между двумя частями транспортного средства, движущимися относительно друг друга, но не в контакте друг с другом); гидравлический тормоз (когда силы возникают в результате действия жидкости, находящейся между двумя частями транспортного средства, движущимися относительно друг друга); двигатель-тормоз (когда эти силы возникают в результате искусственного увеличения тормозящего действия двигателя, передающегося на колеса).
Примечание 2 - Взято из UN ECE Regulation No. 13-Н:1998, определение 2.6.
Примечание 3 - Для целей настоящего международного стандарта устройства управления трансмиссией не рассматриваются как тормоза.
3.4 расстояние между транспортными средствами: Расстояние от замыкающей поверхности движущегося впереди транспортного средства до ведущей поверхности рассматриваемого транспортного средства.
3.5 обычный круиз-контроль: Система, способная поддерживать скорость транспортного средства, которую установил водитель.
3.6 движущееся впереди транспортное средство: Транспортное средство впереди рассматриваемого транспортного средства, двигающееся в том же направлении по той же дороге (см. 3.11).
3.7 свободный транспортный поток: Плавно движущийся транспортный поток, в котором исключены режимы движения "остановка, движение" и резкие торможения.
3.8 временной интервал: Значение , вычисляемое как отношение дистанции
к скорости транспортного средства
.
Примечание - См. рисунок 1а.
|
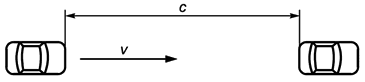
Рисунок 1а - Временной интервал
3.9 установленная скорость: Желаемая скорость движения, устанавливаемая либо водителем, либо некоторой системой управления, внешней по отношению к системе АСС.
Примечание - Установленная скорость является максимально желаемой скоростью транспортного средства, двигающегося под управлением АСС.
3.10 стационарное состояние: Условие, при котором значение описываемого параметра не изменяется во времени, по расстоянию и т.д.
3.11 транспортное средство, являющееся объектом испытаний: Транспортное средство, оборудованное рассматриваемой системой АСС и относящееся к обсуждаемой теме.
3.12 состояния системы АСС: Для целей настоящего стандарта различаются три состояния системы (см. рисунок 2).
3.12.1 состояние "АСС выключено": Состояние, в котором прямой доступ для перевода АСС в состояние "АСС в активном состоянии" отключен.
3.12.2 состояние ожидания АСС: Состояние, в котором система не осуществляет управление продольным движением и готова к активации водителем.
3.12.3 активное состояние АСС: Состояние, в котором система АСС регулирует скорость и/или расстояние между транспортными средствами (дистанцию).
3.12.3.1 активное состояние АСС "Регулирование скорости": Состояние, в котором система АСС регулирует скорость транспортного средства в соответствии с установленной скоростью.
3.12.3.2 активное состояние АСС "следование за транспортным средством": Состояние, в котором система АСС регулирует дистанцию между испытуемым транспортным средством и транспортным средством, за которым оно следует, в соответствии с выбранным временным промежутком.
3.13 транспортное средство мишень: Транспортное средство, за которым следует испытуемое транспортное средство.
3.14 стационарный объект: Объект, находящийся в неподвижном состоянии впереди испытуемого транспортного средства.
4 Обозначения
Таблица 1 - Символы и их значение
Символ | Значение |
Используемая область, общее обозначение для области | |
Освещенная поверхность | |
| Максимально допустимое боковое ускорение на непрямолинейном участке дороги |
Минимально допустимое продольное ускорение = максимально допустимое продольное замедление | |
Максимально допустимое продольное ускорение | |
Максимально допустимое продольное ускорение во время тестирования на непрямолинейном участке дороги | |
| Максимально возможное замедление, достигаемое при ручном управлении |
Дистанция между транспортными средствами | |
Расстояние между объектом и датчиком, общее обозначение для расстояния | |
Дистанция, в пределах которой не требуется обнаружение транспортного средства мишени | |
Расстояние, в пределах которого не требуется измерение расстояния и относительной скорости | |
Измеряемое расстояние | |
Расстояние между источником и проектируемой плоскостью A | |
Максимальное значение расстояния, определяемого на прямых участках дорог | |
| Максимальное значение расстояния, определяемого на непрямолинейных участках дорог |
Интенсивность излучения трансмиттера | |
Интенсивность излучения | |
Интенсивность излучения в установленном направлении | |
Длина стороны рефлектора, применяемого при испытаниях радара | |
Радиус окружности, радиус непрямолинейного участка дороги | |
| Фактический радиус непрямолинейного участка дороги |
Минимальный радиус непрямолинейного участка дороги | |
| Минимальное время, за которое достигается максимальное замедление |
Время, стартовый тест | |
Время, стартовый маневр | |
Время, конечный маневр | |
Время, тест окончания | |
Истинная скорость транспортного средства относительно земли | |
Максимальная скорость на непрямолинейном участке дороги при установленном боковом ускорении | |
| Скорость движения транспортного средства при входе в поворот радиуса |
Минимальная скорость, при которой допускается ускорение в автоматическом режиме | |
Установленная скорость транспортного средства | |
| Максимальная выбираемая скорость для установки |
| Минимальная выбираемая скорость для установки |
| Скорость транспортного средства в конце испытания |
| Максимальная скорость транспортного средства |
| Скорость транспортного средства в начале испытания |
Ширина поля зрения, измеренная от осевой линии дороги, измеренная при | |
Половина угла поля зрения | |
Длина волны радара | |
Временной интервал между транспортными средствами | |
| Максимально возможный постоянный временной интервал при установленной скорости |
Максимальный выбираемый временной интервал | |
| Минимально возможный временной интервал при установленной скорости |
Минимальный выбираемый временной интервал | |
Излучаемая энергия | |
Телесный угол | |
Телесный угол (источника) | |
Освещаемый телесный угол | |
CTT | Коэффициент отражения цели испытания |
FOV | Поле зрения |
HDA | Горизонтальная область распознавания |
RCS | Эффективная поверхность рассеяния |
5 Классификация
5.1 Типы систем адаптивного круиз-контроля
Различные конфигурации приводов для продольного управления приводят к совершенно различному поведению системы. По этой причине четыре типа системы АСС рассматриваются в настоящем стандарте (см. таблицу 2).
Таблица 2 - Классификация типов системы АСС
Тип | Требуется ли ручное управление сцеплением | Требуется ли активное управление тормозами |
1a | Да | Нет |
1b | Нет | Нет |
2a | Да | Да |
2b | Нет | Да |
Возможность замедления системой АСС должна быть четко указана в руководстве по эксплуатации транспортного средства. В случае активного вмешательства в работу тормозной системы в транспортных средствах с педалью сцепления (типа 2а) водитель должен быть четко и заранее проинформирован о потенциальном конфликте между тормозом и управлением двигателем на холостом ходу, если муфта не может быть отключена автоматически. Должна быть обеспечена практически и недвусмысленно процедура передачи управления для водителя (см. 6.3.1).
5.2 Классификация эксплуатационных характеристик на непрямолинейных участках
Настоящий стандарт адаптивного круиз-контроля используется для различных случаев эксплуатации, представленных в таблице 3.
Таблица 3 - Классификация эксплуатационных характеристик АСС
Класс эксплуатации | Возможности относительно радиуса поворота, м |
I | Эксплуатационные характеристики не заявлены |
II |
|
III |
|
IV |
|
6 Требования
6.1 Базовая стратегия управления
Примечание - Включение/выключение функции АСС вручную выполняется переключателем. При возникновении отказа выполняется автоматическое отключение системы.
Система АСС должна, как минимум, обеспечивать следующие стратегии управления и переходы между состояниями. Ниже представлено фундаментальное поведение системы АСС.
Когда АСС в активном состоянии, скорость транспортного средства должна контролироваться автоматически либо поддержанием расстояния от движущегося впереди транспортного средства, либо поддержанием установленной скорости в зависимости от того, какая скорость ниже. Изменение между этими двумя режимами управления осуществляется автоматически с помощью системы АСС.
Постоянное расстояние до движущегося впереди транспортного средства может автоматически поддерживаться системой либо регулироваться водителем (см. 6.3.1).
Переход АСС из состояния ожидания в активное состояние должен быть запрещен, если скорость транспортного средства находится ниже минимальной рабочей скорости . Кроме того, если скорость транспортного средства падает ниже
, в то время как система АСС находится в активном состоянии, автоматическое ускорение должно быть отключено. При этом не обязательно, чтобы система АСС перешла из активного состояния в состояние ожидания (см. 6.3.2 и 6.4).
Если впереди имеется более одного транспортного средства, одно, за которым транспортное средство будет следовать, должно выбираться автоматически (см. 6.2.4.2).
|
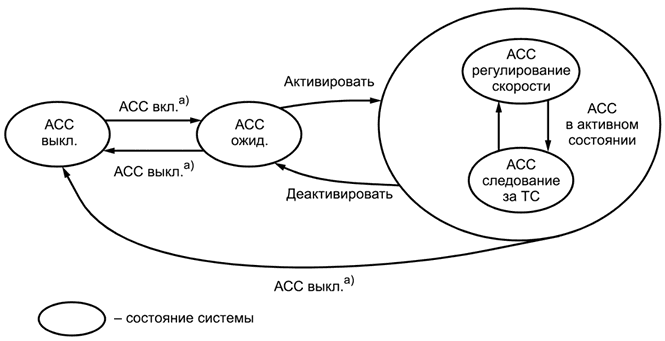
а) вручную и/или автоматически после самотестирования
Рисунок 2 - Состояния и переходы системы АСС
6.2 Функциональность
6.2.1 Режимы управления
Переход между режимами управления (режим следования или регулирование скорости) следует осуществлять автоматически.
6.2.2 Скорость транспортного средства
Система АСС должна быть в состоянии определить скорость контролируемого транспортного средства.
6.2.3 Стационарные цели
Реагирование на присутствие стационарных целей не является обязательным требованием к системе АСС. Если система не предназначена реагировать на присутствие стационарных целей, водитель должен быть проинформирован об этом, по крайней мере, заявлением в руководстве по эксплуатации транспортного средства.
6.2.4 Возможности режима следования за транспортным средством
6.2.4.1 Общие характеристики
должно быть минимальным значением выбираемого временного промежутка для режима управления "следование за транспортным средством" в стационарных условиях для всех скоростей
. Значение
должно быть не менее 0,8 с.
Следует обеспечить по меньшей мере одну установку временного промежутка в интервале от 1,5 до 2,2 с.
При стационарных условиях минимальное расстояние между транспортными средствами должно быть равно:
![]() .
.
При переходных условиях расстояние между транспортными средствами может временно уменьшиться ниже минимального значения. Если возникает такая ситуация, система должна отрегулировать так, чтобы достичь желаемого расстояния.
АСС должна иметь функции определения расстояния, распознавания цели и возможность работать на непрямолинейных участках, как изложено в 6.2.4.2-6.2.4.4.
6.2.4.2 Определение расстояния на прямых участках дорог (классы исполнения I+II+III+IV)
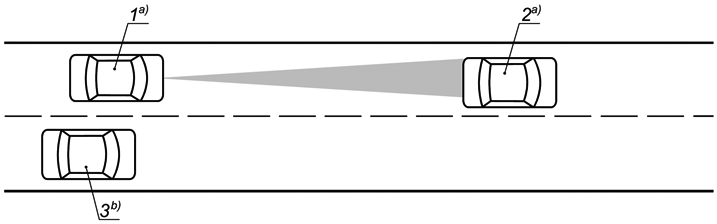
Если движущееся впереди транспортное средство находится на расстоянии в диапазоне от ![]() , до
, до ![]() , система АСС должна измерять расстояние до движущегося впереди транспортного средства (см. рисунок 3).
, система АСС должна измерять расстояние до движущегося впереди транспортного средства (см. рисунок 3).
|

1 - испытуемое транспортное средство; 2 - транспортное средство, движущееся впереди; a - обнаружение не требуется; b - требуется обнаружение транспортного средства; c - требуется определение расстояния
Рисунок 3 - Зоны обнаружения
Если движущееся впереди транспортное средство находится на расстоянии в диапазоне от ![]() до
до ![]() , система АСС должна обнаружить наличие транспортного средства, но не требуется, чтобы АСС измеряла расстояние до транспортного средства или относительную скорость между движущимся впереди и рассматриваемым транспортными средствами.
, система АСС должна обнаружить наличие транспортного средства, но не требуется, чтобы АСС измеряла расстояние до транспортного средства или относительную скорость между движущимся впереди и рассматриваемым транспортными средствами.
Если движущееся впереди транспортное средство находится на расстоянии менее, чем , системе АСС не требуется обнаруживать присутствие этого транспортного средства.
6.2.4.3 Распознавание цели
Если на прямом участке дороги (для АСС классов исполнения II+III+IV), также и на непрямолинейных участках дороги впереди испытуемого транспортного средства находятся несколько транспортных средств, то транспортное средство, движущееся по траектории испытуемого транспортного средства, должно быть обнаружено системой АСС для реагирования в типичной для АСС ситуации, как представлено в 7.4.
|
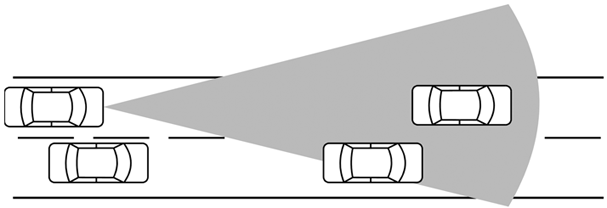
Рисунок 4 - Распознавание цели
6.2.4.4 Способность работы на непрямолинейных участках дорог (классы исполнения II+III+IV)
Система АСС должна обеспечить устойчивое состояние движения за движущимся впереди транспортным средством в соответствии с промежутком времени ![]() на прямых участках дорог (класс I+II+III+IV) и непрямолинейных участках с радиусом до
на прямых участках дорог (класс I+II+III+IV) и непрямолинейных участках с радиусом до ![]() , равным 500 м (класс II+III+IV), и
, равным 500 м (класс II+III+IV), и ![]() , равным 250 м (класс III+IV), и
, равным 250 м (класс III+IV), и ![]() , равным 125 м (класс IV). Поэтому система должна быть в состоянии следовать за движущимся впереди транспортным средством с постоянным временным промежутком
, равным 125 м (класс IV). Поэтому система должна быть в состоянии следовать за движущимся впереди транспортным средством с постоянным временным промежутком ![]() , если движущееся впереди транспортное средство перемещается по непрямолинейному участку с постоянным радиусом кривизны
, если движущееся впереди транспортное средство перемещается по непрямолинейному участку с постоянным радиусом кривизны , с постоянной скоростью
.
![]() ,
,
где ![]() - максимально возможное значение временного промежутка для стационарных условий при движении со скоростью
- максимально возможное значение временного промежутка для стационарных условий при движении со скоростью на прямом участке дороги;
![]() - проектируемое значение поперечного ускорения для непрямолинейного участка на магистральной дороге.
- проектируемое значение поперечного ускорения для непрямолинейного участка на магистральной дороге.
Значения параметров для использования:
![]() =2,0 м/с
=2,0 м/с;
![]() =2,3 м/с
=2,3 м/с;
![]() =2,3 м/с
=2,3 м/с.
Значения для ![]() получены по результатам анализа поведения водителей на непрямолинейных участках (95% водителей). См. рисунок 5.
получены по результатам анализа поведения водителей на непрямолинейных участках (95% водителей). См. рисунок 5.
|
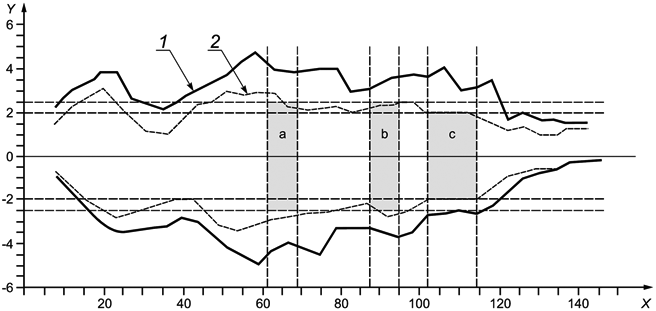
X - скорость обсуждаемого транспортного средства, в км/ч; Y - поперечное ускорение, в м/с; 1 - максимальное значение; 2 - 95%-ная зона; a - класс IV; b - класс III; c - класс II
Рисунок 5 - Поперечное ускорение для среднего водителя
6.3 Основной интерфейс водителя и возможности вмешательства
6.3.1 Элементы операций и реакция системы
6.3.1.1 Система АСС должна обеспечивать водителю средства для выбора и установки желаемой скорости движения.
6.3.1.2 Торможение, примененное водителем, должно деактивировать работу системы АСС по меньшей мере в случае, если водитель инициировал торможение с силой большей, чем сила, инициированная системой АСС (что приводит систему АСС в состояние ожидания, см. рисунок 2).
Система АСС не должна значительно и кратковременно сокращать реакцию торможения при начале торможения водителем (см. документ UN/ECE Regulation No. 13-H), даже когда система АСС тормозила автоматически.
6.3.1.3 Типы АСС систем 1а и 2а должны либо временно приостановить действие, но оставаться в активном состоянии, или перейти в режим ожидания, если водитель нажимает на педаль сцепления. Для систем типа 2а автоматическое торможение может быть продолжено при нажатии на педаль сцепления. После того, когда система АСС отпустит тормоза, она может либо возобновить управление, либо перейти в состояние ожидания в ответ на нажатие педали сцепления водителем.
6.3.1.4 Требования большей мощности от водителя или от системы АСС передадутся на привод активатора (например, на привод дроссельной заслонки). Это всегда дает водителю право перехватить у системы АСС управление мощностью двигателя.
Если действия водителя требуют большей мощности, чем требования мощности от системы АСС, автоматическое торможение должно быть отключено с немедленным отключением тормозной силы. Действие водителя на педаль акселератора не должно приводить к значительной задержке ответа на это действие водителя.
6.3.1.5 Автоматическая активация торможения (только для системы АСС типа 2) не должна приводить к блокировке колес на периоды времени больше, чем это позволяют устройства антиблокировки колес (ABS). Это не требует использования АБС.
6.3.1.6 Автоматическое регулирование мощности системой АСС не должно приводить к чрезмерной пробуксовке колес на срок более чем позволяет система управления тягой. При этом не требуется система контроля тяги.
6.3.1.7 АСС системы могут автоматически регулировать интервал времени без вмешательства водителя для того, чтобы реагировать на условия вождения, формируемые окружающей средой (например, плохие погодные условия). Тем не менее скорректированный интервал времени не должен быть меньше минимального интервала времени, выбранного водителем.
6.3.1.8 Если система позволяет водителю выбрать нужный интервал времени, метод выбора должен соответствовать одному из следующих:
1) если система сохраняет последний выбранный временной интервал после того, как она перешла в состояние "выключено", как показано на рисунке 2, временной интервал должен быть четко показан водителю по крайней мере после активации системы;
2) если система не сохраняет последний выбранный временной интервал после того, как она перешла в состояние "выключено", как показано на рисунке 2, временной интервал должен быть установлен (предопределенное значение по умолчанию) не менее 1,5 с.
6.3.1.9 Если есть обычная функция круиз-контроля в дополнение к АСС, не должно быть никакого автоматического переключения между АСС и обычным круиз-контролем.
6.3.2 Элементы отображения
Минимальная информация обратной связи для водителя содержит информацию о состоянии АСС (активна или неактивна система АСС) и установленной скорости. Это может быть сделано с помощью комбинированного вывода информации, например отображения информации об установленной скорости только тогда, когда система АСС находится в активном состоянии.
Если система АСС недоступна по причине неисправности, водитель должен быть информирован об этом. Если для уведомления водителя используется символ, необходимо применять стандартный символ (см. ИСО 2575).
Если транспортное средство оборудовано как АСС, так и обычной системой круиз-контроля, водитель должен быть осведомлен о том, какая система работает в текущий момент.
Сигнал "Транспортное средство обнаружено", который используют для адаптации управления, рекомендуется, но не является обязательным.
6.3.3 Символы
Если символы используются для идентификации функций АСС или неисправностей, следует использовать стандартные символы в соответствии с ИСО 2575.
6.4 Эксплуатационные ограничения
Автоматическое положительное ускорение с помощью системы АСС возможно при скорости транспортного средства не меньше, чем 5 м/с
.
________________
Самый низкий существующий предел для традиционной системы круиз-контроля - 5 м/с.
Не должно быть применения силы торможения в случае автоматической деактивации системы АСС при скорости менее .
Минимальная установленная скорость: ![]() 7 м/с и
7 м/с и ![]() .
.
Среднее автоматическое замедление системы АСС не должно превышать 3,5 м/с (в среднем за 2 с).
Средняя скорость изменения автоматического торможения (отрицательный рефлекс) не должна превышать 2,5 м/с (в среднем за 1 с).
Автоматическое ускорение системы АСС не должно превышать ![]() 2,0 м/с
2,0 м/с.
Если движущееся впереди транспортное средство обнаружено в пределах от до
, а расстояние не может быть определено, система не должна применять автоматическое ускорение.
6.5 Включение тормозных огней (только для АСС типа 2)
Если автоматическое торможение применено, тормозные огни должны быть включены. Когда система АСС применяет другие устройства торможения, система может включать тормозные огни. Тормозные огни должны быть включены в течение 350 мс при начале торможения системой АСС. Для предотвращения раздражающего моргания стоп-сигнала он может оставаться включенным в течение разумного периода времени после того, как торможение АСС закончилось.
6.6 Реакция при неисправностях
В таблицах 4 и 5 показаны требуемые реакции на неисправности в зависимости от того, в каких подсистемах возникла неисправность (см. рисунок 6).
Таблица 4 - Реакция на неисправности для АСС типа 1
Неисправность в подсистемах | Неисправность возникает во время применения АСС | |
Управление замедлением | Управление двигателем | |
1 Двигатель | Следует отказаться от режима управления двигателем в системе АСС | Следует отказаться от режима управления двигателем в системе АСС |
2 Коробка передач | Следует отказаться от режима управления в системе АСС | Следует отказаться от режима управления двигателем в системе АСС |
3 Датчики распознавания и оценки расстояния | Следует применить ту же стратегию, что и до неисправности по крайней мере до тех пор, пока | Следует отказаться от режима управления двигателем в системе АСС |
4 Контроллер АСС | Следует отказаться от режима управления в системе АСС | Следует отказаться от режима управления в системе АСС |
Таблица 5 - Реакция на неисправности для АСС типа 2
Неисправность в подсистемах | Неисправности возникают во время применения АСС | ||
Управление тормозами | Управление двигателем | ||
1 | Двигатель | Следует поддерживать торможение по мере необходимости по крайней мере для фактического/текущего тормозного маневра | Следует отказаться от режима управления двигателем в системе АСС |
2 | Система торможения | Следует отказаться от режима управления в системе АСС. | Следует отказаться от режима управления двигателем в системе АСС |
3 | Датчики распознавания и оценки расстояния | Следует инициировать стратегию контроллера, начиная с последней действительной команды торможения. Торможение в этом случае не следует применять резко. Систему следует отключить немедленно после того, как водитель использует педаль тормоза или акселератора или выключатель АСС | Следует отказаться от режима управления двигателем в системе АСС |
4 | Контроллер АСС | Следует отказаться от режима управления в системе АСС | Следует отказаться от режима управления в системе АСС |
| |||
|
________________
Только системы типа 2.
Рисунок 6 - Активаторы продольного управления
При возникновении неисправностей, описанных в таблицах 4 и 5, необходимо немедленно уведомить водителя (за исключением случая выхода из строя коробки передач с системами 2-го типа). Уведомление должно оставаться активным, пока система не выключится.
Повторная активация системы АСС должна быть запрещена до успешного прохождения самотестирования: инициируется либо выключением/включением зажигания или включением/выключением системы АСС.
7 Методы испытаний для оценки эксплуатационных характеристик
7.1 Условия окружающей среды
a) Местом испытаний должна быть ровная сухая поверхность с асфальтовой или бетонной поверхностью.
b) Температура должна быть в пределах от минус 20°С до плюс 40°С.
c) Видимость в горизонтальном направлении должна быть больше 1 км.
7.2 Спецификация мишени испытаний
7.2.1 Общие положения
Мишени испытаний определены для технологий, используемых сегодня. Что касается других технологий, для них должны быть использованы соответствующие представительные мишени для испытаний.
7.2.2 Лидар инфракрасного диапазона
Мишень испытаний зависит от значения инфракрасного коэффициента испытания мишени (СТТ) и поперечного сечения испытуемой мишени. Минимальное поперечное сечение испытуемых мишеней A и B равно 20 см.
Мишень испытаний A: диффузный отражатель с коэффициентом СТТ, равным 2,0 м/ст ±10% (см. приложение A).
Мишень испытаний B: диффузный отражатель с коэффициентом СТТ, равным 1,0 м/ст ±10%.
7.2.3 Радар миллиметрового диапазона
Мишень для испытаний радара определяют по эффективной площади отражения цели.
Для диапазона частоты от 20 ГГц до 95 ГГц:
- мишень для испытаний A: эффективная площадь отражения для мишени A должна быть 10 м;
- мишень для испытаний B: эффективная площадь отражения для мишени B должна быть 3 м.
Для значительно отличающихся частотных диапазонов эффективная площадь отражения цели должна быть определена (см. приложение A).
7.3 Испытания на дальность обнаружения мишени (см. 6.2.4.2)
Процедура испытаний для ,
,
и
.
Эталонной плоскости транспортного средства соответствует прямоугольник по ширине испытуемого транспортного средства, высотой 0,9 м, начинающийся на высоте 0,2 м. В качестве зоны обнаружения рассматриваются зоны с различными расстояниями между передней и задней поверхностями. Они также ограничены минимальной высотой легковых автомобилей. При испытаниях выбранный отражатель должен быть обнаружен по крайней мере на одной боковой позиции в пределах эталонной плоскости транспортного средства на позиции ,
,
,
(см. рисунок 7).
Для позиции следует использовать мишень испытаний A.
Для позиций ,
и
следует использовать мишень испытаний B.
Позиция соответствует фиксированной позиции с измеренным расстоянием 75 м перед транспортным средством.
Испытания по оценке расстояния следует проводить при движении испытуемого транспортного средства и мишени. В качестве опции допускаются испытания при стационарном состоянии испытуемого транспортного средства и мишени испытаний.
Максимальное время распознавания мишени не должно превышать 2 с после показа мишени.
|
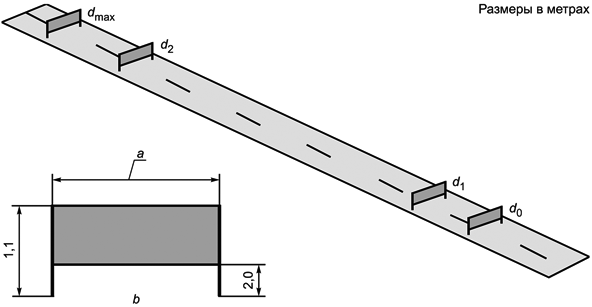
a - ширина транспортного средства; b - ответная панель
Рисунок 7 - Зона распознавания в продольном направлении
7.4 Испытания по распознаванию мишени (см. 6.2.4.3)
7.4.1 Начальные условия
Два транспортных средства одной модели движутся впереди рядом друг с другом со скоростью ![]() . Расстояние между продольными осевыми линиями движущихся впереди транспортных средств равно (3,5±0,25) м. Ширина движущихся впереди транспортных средств должна составлять от 1,4 до 2,0 м. Испытуемое транспортное средство двигается за одним из движущихся впереди транспортных средств в установившемся режиме с управлением следованием. Движущееся впереди транспортное средство, за которым следует испытуемое транспортное средство, назовем транспортное средство мишень.
. Расстояние между продольными осевыми линиями движущихся впереди транспортных средств равно (3,5±0,25) м. Ширина движущихся впереди транспортных средств должна составлять от 1,4 до 2,0 м. Испытуемое транспортное средство двигается за одним из движущихся впереди транспортных средств в установившемся режиме с управлением следованием. Движущееся впереди транспортное средство, за которым следует испытуемое транспортное средство, назовем транспортное средство мишень.
Временной промежуток = ![]() и установленная скорость более
и установленная скорость более ![]() .
.
Поперечное смещение продольной оси испытуемого транспортного средства относительно продольной оси транспортного средства мишени должно быть менее 0,5 м (см. рисунок 8); ![]() =27 м/с (~100 км/ч).
=27 м/с (~100 км/ч).
Примечание - Если транспортное средство не способно двигаться на такой скорости, следует использовать скорость ![]() , равную 22 м/с (~80 км/ч).
, равную 22 м/с (~80 км/ч). ![]() м/с.
м/с.
|
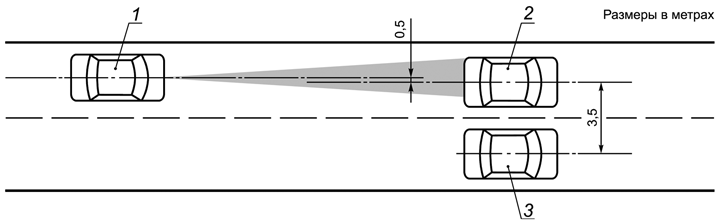
1 - испытуемое транспортное средство; 2 - транспортное средство мишень; 3 - движущееся впереди транспортное средство
Рисунок 8 - Испытания по распознаванию мишени (начальные условия)
7.4.2 Процедура испытаний
Транспортное средство мишень разгоняется до скорости ![]() . Испытание проведено успешно, если испытуемое транспортное средство движется за движущимся впереди транспортным средством под контролем АСС и движущимся впереди транспортным средством на соседней полосе (см. рисунок 9).
. Испытание проведено успешно, если испытуемое транспортное средство движется за движущимся впереди транспортным средством под контролем АСС и движущимся впереди транспортным средством на соседней полосе (см. рисунок 9).
|
________________
![]() ;
; ![]() .
.
1 - испытуемое транспортное средство; 2 - транспортное средство мишень; 3 - движущееся впереди транспортное средство
Рисунок 9 - Испытания по распознаванию мишени (конечные условия)
7.5 Испытания для оценки возможностей на непрямолинейных участках дорог (см. 6.2.4.4)
7.5.1 Общие положения
При проведении данных испытаний следует рассмотреть прогноз геометрии дороги совместно с полем зрения датчиков системы АСС. Использование различных методов прогноза геометрии дороги и результатов просмотра дороги датчиками приводит к необходимости использования сценария вождения.
7.5.2 Натурные испытания (классы II, III+IV)
Испытательный трек должен быть или круговым треком постоянного радиуса, или непрямолинейным участком дороги постоянного радиуса. Радиус должен быть в пределах от 80% до 100% от ; направление движения на треке должно быть как по часовой стрелке, так и против часовой стрелки. Нет ограничений относительно маркировки полосы, ограждений и т.д. (см. рисунок 10).
Для систем класса II испытания следует проводить на треке радиусом ![]() , равным 500 м.
, равным 500 м.
Для систем класса III испытания следует проводить на треке радиусом ![]() , равным 250 м.
, равным 250 м.
Для систем класса IV испытания следует проводить на треке радиусом ![]() , равным 125 м.
, равным 125 м.
Размеры в метрах
|
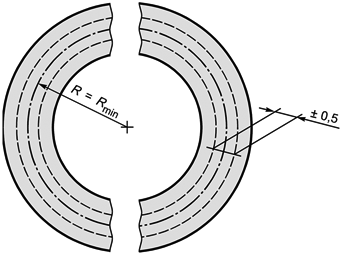
Рисунок 10 - Схема испытательного трека
7.5.3 Испытания для оценки возможностей на непрямолинейных участках дорог, транспортное средство мишень
Транспортное средство мишень должно быть оборудовано мишенью испытаний A, как определено в 7.2. Мишень испытаний должна быть расположена в середине задней части транспортного средства на высоте (0,6±0,1) м от поверхности. Остающаяся видимой поверхность транспортного средства должна быть скрыта так, чтобы задняя поверхность с удаленной испытательной мишенью закрывала собой не более 2 м эффективной площади отражения мишени и имела коэффициент отражения не более 20% запланированного в испытаниях.
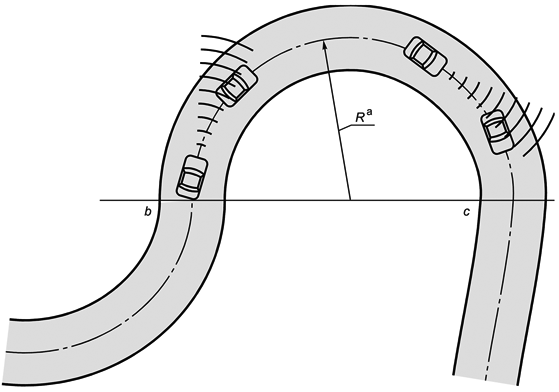
7.5.4 Сценарий испытаний в движении
Испытуемое транспортное средство следует за транспортным средством мишенью по той же траектории (±0,5 м поперечного расхождения центральных линий обоих транспортных средств) в режиме управления АСС. Оба транспортных средства перед началом испытаний должны удовлетворять начальным условиям испытаний, как определено на рисунке 8 (только испытуемое транспортное средство и транспортное средство цель). Подробности испытаний приведены в таблице 6 и показаны на рисунке 11.
Скорость транспортного средства цели в начале теста устанавливается следующим образом:
![]() м/с,
м/с,
где ![]() зависит от радиуса нелинейного участка (см. приложение A);
зависит от радиуса нелинейного участка (см. приложение A);
![]() =2,0 м/с
=2,0 м/с для
![]() =500 м;
=500 м;
![]() =2,3 м/с
=2,3 м/с для
![]() =250 м;
=250 м;
![]() =2,3 м/с
=2,3 м/с для
![]() =125 м.
=125 м.
В надлежащее время транспортное средство мишень притормаживает, и наблюдается реакция испытуемого транспортного средства. Испытуемое транспортное средство должно начать замедляться в связи с уменьшением расстояния до целевого транспортного средства до того, как интервал времени станет меньше 2/3 .
Таблица 6 - Условия испытаний на непрямолинейных участках
Наименование показателя | Предварительное испытание | Начальное условие | 1-й испытательный маневр | 2-й испытательный маневр |
Транспортное средство мишень | ||||
Скорость |
| Уменьшить скорость на (3,5±0,5) м/с |
| |
Время |
| Время запуска 0 с | 2 с | |
Радиус |
|
| ||
Испытуемое транспортное средство | ||||
Скорость | Устанавливается АСС | |||
Ускорение |
| Значение замедления подлежит наблюдению | ||
Радиус |
|
| ||
Временной интервал до транспортного средства цели |
| Устанавливается АСС, подлежит наблюдению | ||
|
________________
![]() ;
;
испытания начинаются, когда испытуемое транспортное средство находится на части трека с постоянным радиусом и соблюдаются другие начальные условия;
испытания заканчиваются, когда испытуемое транспортное средство замедляется (положительный результат) или когда интервал времени станет меньше 2/3
.
Рисунок 11 - Пример компоновки испытательного трека
Приложение A
(обязательное)
Техническая информация
A.1 Лидар, коэффициент отражения испытуемой мишени
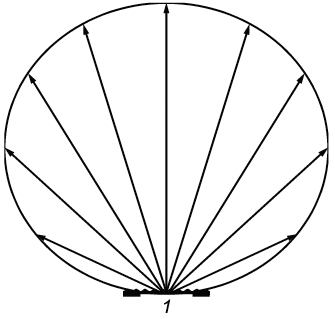
A.1.1 Телесный угол
Телесный угол , ср, представляет собой отношение подвергшейся облучению освещаемой поверхности к квадрату радиуса сферы (см. рисунок A.1).
![]() ,
,
где - освещенная площадь, м
;
- расстояние между источником излучения и площадью проецирования
, м;
- телесный угол источника излучения, ср (1 ср).
|
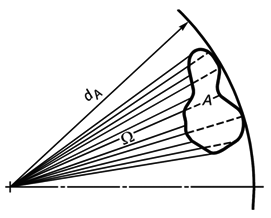
Рисунок A.1 - Телесный угол
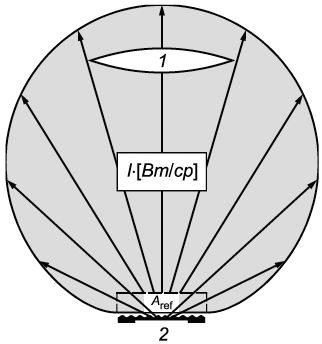
A.1.2 Излученная интенсивность
Интенсивность, излученную в данном направлении от отражателя, измеренную перед принимающей поверхностью, Вт/ср: вычисляют как мощность, излученную источником
в пределах телесного угла
.
![]() ,
,
где - мощность излучения, Вт;
- облученный телесный угол (ср).
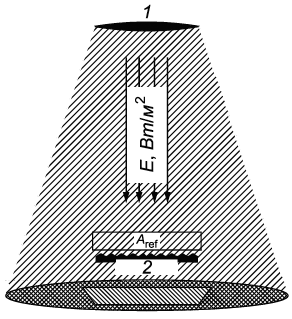
A.1.3 Интенсивность излучения
Интенсивность излучения , Вт/м
- это отношение излученной мощности к площади облучаемой поверхности.
представляет собой плотность излучения на облучаемой площади:
![]() ,
,
где - падающая излученная мощность, Вт;
- площадь облучаемой поверхности, м
.
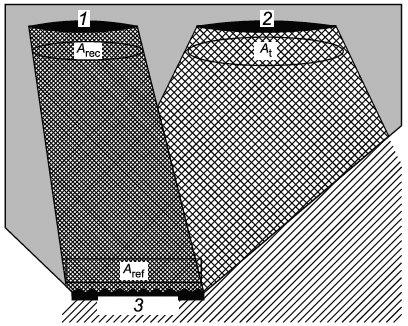
A.1.4 Коэффициент тестового макета СТТ
Тестовый макет характеризуется коэффициентом отражения, идентичным отражательной способности грязного транспортного средства без специальных отражателей:
![]() ,
,
где - коэффициент тестового макета, м
/ср;
- интенсивность, излученная в данном направлении от отражателя, измеренная перед принимающей поверхностью, Вт/ср;
- интенсивность излучения на выходе излучателя, Вт/м
.
Отражатель (см. рисунок A.2) с установленным значением СТТ должен иметь пространственное распределение отражения 8·10
ср.
|
1 - приемное устройство; 2 - отражатель
Рисунок A.2 - Сценарий приема
Значение СТТ характеризует только качество отражателя (затухание). Для процедуры испытания достаточно воспользоваться уголковым отражателем (см. рисунок А.3) (сокращение поверхности до "точечного размера"). Тем не менее можно использовать большую поверхность отражения, если общая отражательная способность поверхности не превышает упомянутого значения.
|
1 - излучатель; 2 - отражатель
Рисунок А.3 - Сценарий передачи
A.1.5 Размер отражателя
Необходимо определение размеров отражателя (см. рисунок А.4). Опытным путем установлено, что рефлектор Ламберта площадью приблизительно 1,7 м является идеальным решением для имитации транспортного средства. В качестве другой методики можно воспользоваться "тройным" отражателем площадью приблизительно 20 см
.
|
1 - приемное устройство; 2 - излучатель; 3 - отражатель
Рисунок A.4 - Сценарий рефлектора
Рефлектор Ламберта отражает полную энергию внутри сферической области (см. рисунок A.5).
![]() ,
,
где - излученная мощность, Вт;
- излученная интенсивность, Вт/ср;
- телесный угол, ср.
Размер 1,7 м соответствует поперечному сечению небольшого транспортного средства.
|
1 - отражатель
Рисунок А.5 - Отражатель Ламберта
A.2 Определение RCS тестового макета с уголковым отражателем
Тестовый макет характеризуется параметром поперечного сечения RCS.
RCS=(10±3) м. Для частот, известных сегодня (24, 60, 77, 90 ГГц), 10 м
представляют по меньшей мере 95% всех транспортных средств, передвигающихся по автомобильным дорогам. Должны проводиться исследования для различных важных частотных диапазонов. Испытуемая мишень - согласно рисунку A.6.
|
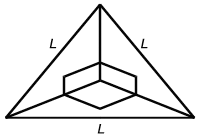
Рисунок A.6 - Уголковый отражатель![]() ,
,
где - длина волны, м.
A.3 Способность следования
Что касается дистанции , то значение 0,25 с основывается больше на опыте, чем на технических данных. Для значений менее 0,25 с предположение заключается в том, что водитель будет немедленно вмешиваться. Таким образом, нет никакой необходимости избегать ускорения АСС (для сценария врезания на низкой скорости). Если интервал времени не менее 0,5 с или более, нет никакой гарантии, что водитель будет вмешиваться. Таким образом, система должна быть в состоянии обнаружить и должна избежать ускорения.
Приложение ДА
(обязательное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 2575 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык международного стандарта ISO 2575. Официальный перевод данного международного стандарта находится в Федеральном информационном фонде стандартов Российской Федерации. | ||
Библиография
[1] | ИСО 6161 | Персональное средство защиты глаз - Фильтры и средства защиты глаз от лазерного излучения. (Personal eye-protectors - Filters and eye-protectors against laser radiation) |
[2] | IEC 60825-1 | Безопасность лазерных устройств - Часть 1. Классификация и требования оборудования. (Safety of laser products - Part 1: Equipment classification and requirements) |
[3] | MITSCHKE, M., WALLENTOWITZ, H. and SCHWARTZ, E. | Исключение критических ситуаций при боковых ускорениях с использованием состояния "контроль". (Vermeiden querdynamisch kritischer |
УДК 629.3.018.7:006.354 | ОКС 43.040.15 |
Ключевые слова: интеллектуальные транспортные системы, транспортное средство, адаптивный круиз-контроль, методы испытаний | |
Электронный текст документа
и сверен по:
, 2017
{kind=link}