ГОСТ Р 70689-2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Дороги автомобильные общего пользования
ЛАЗЕРНОЕ СКАНИРОВАНИЕ
Общие требования к проведению работ
Automobile roads of general use. Laser scanning. General requirements for work
ОКС 07.040
Дата введения 2023-09-01
Предисловие
1 РАЗРАБОТАН Федеральным автономным учреждением "Российский дорожный научно-исследовательский институт" (ФАУ "РОСДОРНИИ") Министерства транспорта Российской Федерации
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 418 "Дорожное хозяйство"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 10 августа 2023 г. N 628-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
1 Область применения
Настоящий стандарт устанавливает общие требования к выполнению лазерного сканирования автомобильных дорог (в том числе автомагистралей), искусственных сооружений, объектов дорожной и придорожной инфраструктуры на всех этапах жизненного цикла автомобильной дороги.
Настоящий стандарт предназначен для использования организациями-заказчиками, проектно-изыскательскими, строительными и эксплуатирующими организациями, ведущими деятельность в сфере дорожного хозяйства.
Положения настоящего стандарта могут быть применены при выполнении работ на городских улицах.
Настоящий стандарт не распространяется на использование тахеометров с функцией лазерного сканирования и систем лазерного сканирования с использованием технологии SLAM.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 12.0.230-2007 Система стандартов безопасности труда. Системы управления охраной труда. Общие требования
ГОСТ 12.4.281-2021 (ISO 20471:2013 + Amd 1:2016) Система стандартов безопасности труда. Одежда специальная повышенной видимости. Технические требования и методы испытаний
ГОСТ 11897 Штативы для геодезических приборов. Общие технические требования и методы испытаний
ГОСТ 32869-2014 Дороги автомобильные общего пользования. Требования к проведению топографо-геодезических изысканий
ГОСТ Р 21.301 Система проектной документации для строительства. Правила выполнения отчетной технической документации по инженерным изысканиям
ГОСТ Р 53606-2009 Глобальная навигационная спутниковая система. Методы и технологии выполнения геодезических и землеустроительных работ. Метрологическое обеспечение. Основные положения
ГОСТ Р 57371-2016 Глобальная навигационная спутниковая система. Методы и технологии выполнения геодезических работ. Оценка точности определения местоположения. Основные положения
ГОСТ Р 58350 Дороги автомобильные общего пользования. Технические средства организации дорожного движения в местах производства работ. Технические требования. Правила применения
ГОСТ Р 59328-2021 Аэрофотосъемка топографическая. Технические требования
ГОСТ Р 59562 Съемка аэрофототопографическая. Технические требования
ГОСТ Р 70690-2023 Дороги автомобильные общего пользования. Лазерное сканирование. Требования к данным лазерного сканирования на различных этапах жизненного цикла автомобильной дороги
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1
базовая станция: Закрепленный на местности геодезический пункт с известными с заданной точностью координатами и высотой, на котором выполняются геодезические спутниковые определения одновременно с наблюдениями на удаленном перемещающемся геодезическом спутниковом приемнике. [СП 317.1325800.2017, пункт 3.1.7] |
3.2 инерциальное измерительное устройство: Жестко связанное с фотокамерой или системой лазерного сканирования (лидаром) устройство, основанное на сочетании акселерометров и гироскопов, предназначенное для определения углов ориентации фотокамеры или лидара во время выполнения аэрофотосъемки, панорамной фотосъемки и лазерного сканирования.
3.3 инициализация: Процесс сбора измерительной информации для последующей обработки траектории движения используемого оборудования, включающий в себя определение начальных и конечных условий для пространственного ориентирования инерциального измерительного устройства.
3.4
параметры трансформирования систем координат: Параметры, с помощью которых выполняется преобразование координат из одной системы координат в другую. [ГОСТ 32453-2017, пункт 2.28] |
3.5 лазерное сканирование: Метод определения пространственного положения объектов местности с помощью систем лазерного сканирования.
3.6 лидар: Устройство, сочетающее в себе модуль формирования развертки и дальномер, метод работы которого основан на измерении расстояний путем излучения лазерного луча и замера времени возвращения отраженного луча, с учетом формы направленного сигнала.
3.7
опознавательный знак; опознак: Точка на местности, закрепленная геодезическим пунктом временного закрепления или совмещенная с контуром местности, однозначно распознаваемая на аэрофотоснимке, определенная в плане и по высоте с заданной точностью и служащая планово-высотным съемочным геодезическим обоснованием воздушного лазерного сканирования и аэрофотосъемки. [СП 317.1325800.2017, пункт 3.1.8] |
Примечание - Допускается применение при использовании всех видов систем лазерного сканирования для однозначного распознавания на облаке ТЛО в том числе.
3.8
облако точек лазерных отражений; облако ТЛО: Совокупность фиксируемых лазерным сканером точек земной поверхности и объектов, характеризуемых пространственными координатами и интенсивностью отражения. [ГОСТ Р 70174-2022, пункт 3.1.3] |
3.9 программа работ по лазерному сканированию: Организационно-распорядительный документ, в котором установлены объемы, методики и технология выполнения работ по лазерному сканированию, в том числе автомобильных дорог и искусственных сооружений, необходимые и достаточные для выполнения задания.
3.10 система лазерного сканирования: Программно-аппаратный комплекс, предназначенный для автоматического измерения расстояния и направления до поверхности объекта с помощью лидара с последующим формированием облака ТЛО.
3.11 скан: Облако ТЛО, получаемое системой лазерного сканирования за один цикл ее работы.
Примечание - Различают каркасные сканы, выполненные для обеспечения получения единого облака ТЛО объекта съемки и привязки к системе координат, и дополнительные сканы, выполненные для увеличения площади съемки, повышения ее детализации или устранения теневых зон.
3.12 теневая зона: Область в облаке ТЛО, в которой отсутствуют точки лазерных отражений ввиду наличия препятствий в виде объектов на пути луча лазерного импульса либо низкой отражающей способности поверхности.
3.13 станция сканирования: Точка на местности, на которой выполняется съемка наземной системой лазерного сканирования.
3.14
цифровая модель рельефа; ЦМР: Информация о рельефе местности, адекватная ее топографической реальности, представленная совокупностью точек с известными координатами и высотами, с возможностью аппроксимации рельефа в любой точке модели. [ГОСТ 32869-2014, пункт 3.31] |
3.15 угол маски возвышения: Угол, отсчитываемый от горизонта, ниже которого запись спутниковых измерений не используется.
4 Обозначения и сокращения
ВЛС | - | воздушное лазерное сканирование; |
ГГС | - | государственная геодезическая сеть; |
ГНС | - | государственная нивелирная сеть; |
КТ | - | контрольная точка; |
МЛС | - | мобильное лазерное сканирование; |
НЛС | - | наземное лазерное сканирование; |
ОГС | - | опорная геодезическая сеть; |
ОП | - | опорная точка; |
СГС | - | съемочная геодезическая сеть; |
ССДС | - | сеть спутниковых дифференциальных станций; |
ГНСС | - | глобальная навигационная спутниковая система; |
ВОГС | - | ведомственная опорная геодезическая сеть. |
5 Общие требования
5.1 Лазерное сканирование выполняется с целью получения информации о поверхности земли и предметах местности, его результатом является облако ТЛО.
5.2 В общем случае комплекс работ по лазерному сканированию включает следующие этапы:
- подготовительные работы;
- создание геодезического обоснования;
- лазерное сканирование;
- обработку данных и экспорт облака ТЛО.
5.3 По методам съемки системы лазерного сканирования разделяют на следующие виды:
- наземное стационарное;
- наземное мобильное;
- воздушное.
5.4 Наземное стационарное лазерное сканирование применяют для сканирования мостовых сооружений, труб, площадок отдыха, пунктов взимания платы, зданий и сооружений объектов дорожного и придорожного сервиса и других площадных объектов, а также в случаях, когда требуется получить данные с высокой точностью.
Наземное мобильное лазерное сканирование применяют как на площадных, так и на линейно-протяженных объектах, где обеспечивается возможность движения моторизированных и немоторизированных платформ со сканирующей лазерной системой, а объекты сканирования находятся в пределах прямой видимости.
Воздушное лазерное сканирование применяют при проведении инженерных изысканий, при трассировании для строительства и реконструкции автомобильных дорог, а также в труднодоступных местах.
5.5 При выборе типа системы лазерного сканирования для выполнения различных видов работ следует руководствоваться ее экономической целесообразностью и техническими характеристиками, которые должны обеспечивать необходимую точность проводимых работ в соответствии с действующей нормативно-технической документацией.
5.6 Область применения систем лазерного сканирования, в зависимости от видов работ, соответствующих этапам жизненного цикла автомобильных дорог, представлена в ГОСТ Р 70690-2023 (таблица 3).
5.7 Применение систем лазерного сканирования для выполнения специальных видов работ или геодезического сопровождения отдельных видов работ определяется техническим заданием на производство работ. Порядок проведения работ должен быть определен в программе работ по лазерному сканированию и согласован с заказчиком.
5.8 Лазерное сканирование объектов, информация о которых содержит сведения, составляющие государственную тайну, выполняют в соответствии с требованиями нормативно-правовых документов, регламентирующих работу с такими сведениями.
5.9 Лазерное сканирование необходимо выполнять в соответствии с инструкцией по эксплуатации оборудования.
5.10 Данные, полученные в результате выполнения комплекса работ по лазерному сканированию, должны удовлетворять требованиям ГОСТ Р 70690.
5.11 В соответствии с требованиями к данным ГОСТ Р 70690 методику выполнения работ по лазерному сканированию и способы контроля разделяют на два технологических процесса:
- проектный (проектно-изыскательские работы и строительство): настоящий процесс предусматривает обязательное развитие съемочной геодезической сети, а также проведение контроля на протяжении всего периода работ;
- общий: настоящий технологический процесс не требует развития съемочной геодезической сети, проверка результатов осуществляется методом выборочного контроля.
5.12 При проектном технологическом процессе в пределах полосы отвода автомобильной дороги должно быть обеспечено скашивание травы и при необходимости должна быть осуществлена вырубка деревьев, кустарников и лиан в соответствии с приказом [1] для повышения качества проводимых работ.
В случае невозможности обеспечения вышеуказанных требований допускается применение спутниковых ГНСС приемников, тахеометров и других средств измерений для определения истинной отметки рельефа.
5.13 В целях исключения образования теневых зон, а также корректного отражения лазерного луча от сканируемой поверхности поверхность должна быть сухой и не должна иметь загрязнений, препятствующих или искажающих отражение лазерного луча.
6 Требования к системам лазерного сканирования
6.1 Требования к составу системы лазерного сканирования
В состав системы лазерного сканирования должны входить:
- лидар;
- накопитель памяти;
- аккумулятор питания внутренний (внешний);
- блок управления системой.
Данные, полученные с помощью систем лазерного сканирования, должны соответствовать требованиям п.7.4 ГОСТ Р 70690-2023.
В состав дополнительных измерительных систем, применяемых совместно с системами лазерного сканирования, могут входить:
- фотокамеры (строчные, панорамные, мультиспектральные, тепловизионные и др.);
- приемники ГНСС и дополнительные антенны;
- инерциальная навигационная система;
- одометр;
- профилометр;
- георадиолокационное оборудование.
Данные, полученные с дополнительных измерительных систем, применяемых совместно с системами лазерного сканирования, должны иметь координатно-временную привязку.
6.2 Требования к транспортным средствам, летательным средствам и конструктивным платформам, совместно используемым с системами лазерного сканирования
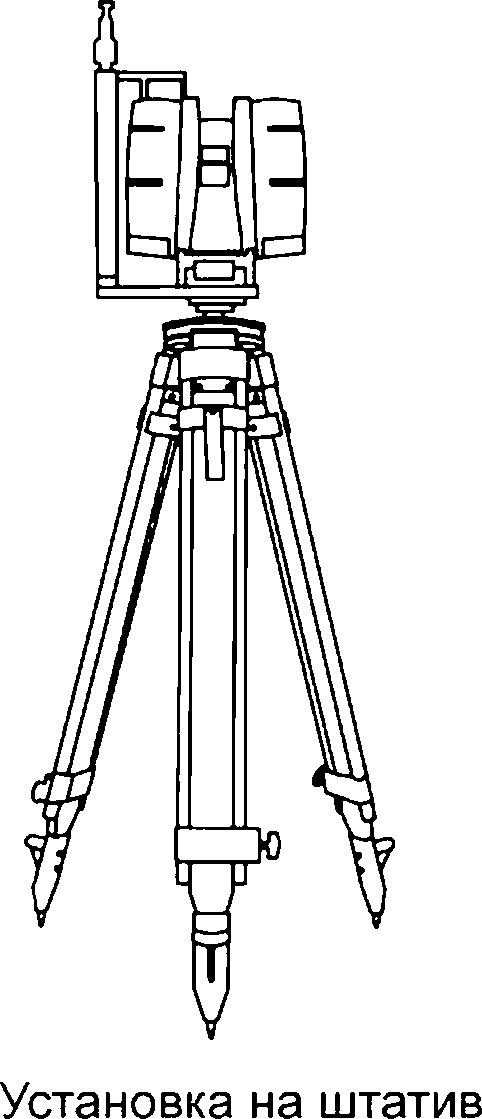
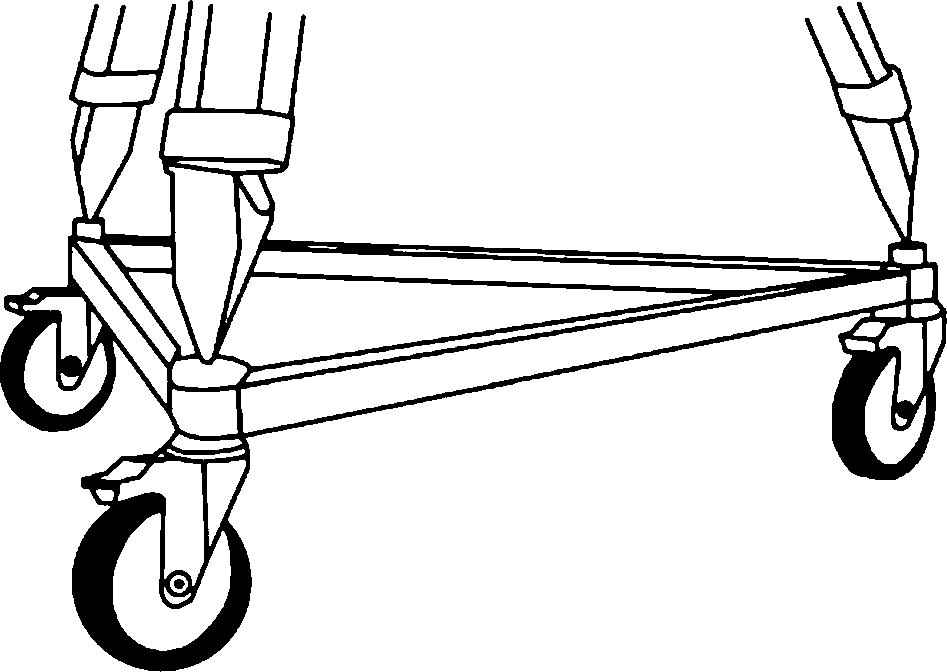
6.2.1 Для выполнения наземного лазерного сканирования систему НЛС устанавливают на штатив (рисунок 1) по ГОСТ 11897. Допускается установка сканирующей системы на иные устройства и конструктивные элементы, обеспечивающие устойчивое положение НЛС, а также совместное использование с тележками для штатива (рисунок 1) и с другими видами платформ.
 | 
|
а) Установка на штатив | б) Тележка для штатива |
Рисунок 1 - Установка наземной системы лазерного сканирования
6.2.2 Навесное и дополнительное оборудование моторизированных и немоторизированных платформ для выполнения МЛС должно соответствовать требованиям [2], а также обеспечивать следующее:
- надежное закрепление внешних элементов системы МЛС на кузове (раме) используемой платформы;
- бесперебойное соединение компонентов системы МЛС, в том числе с дополнительными устройствами;
- элементы системы МЛС не должны затруднять управление используемой платформы;
- необходимое и бесперебойное электропитание для системы лазерного сканирования.
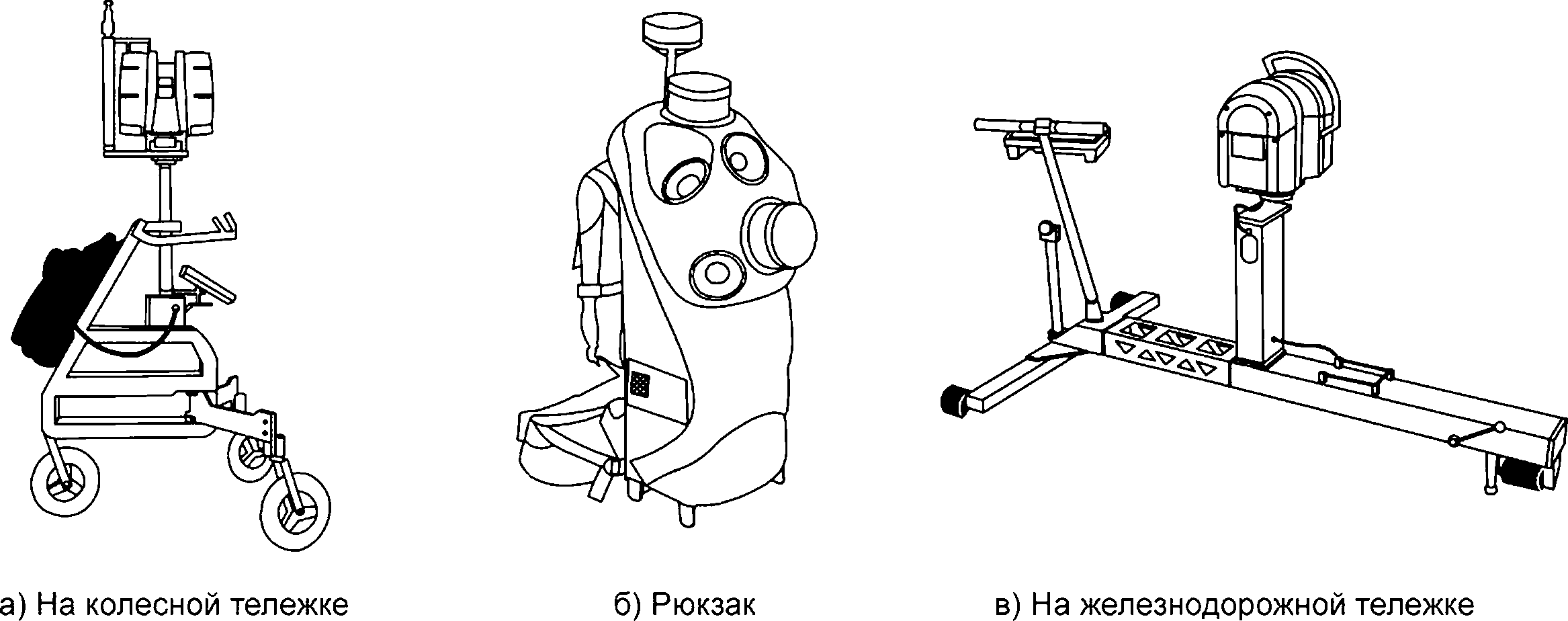
В качестве немоторизированных платформ для систем МЛС могут применяться специализированные тележки, рюкзаки, тележки для железных дорог и др. согласно рисунку 2.
 |  | 
|
а) На колесной тележке | б) Рюкзак | в) На железнодорожной тележке |
Рисунок 2 - Варианты монтирования мобильных систем лазерного сканирования на немоторизированных платформах
6.2.3 При выполнении ВЛС применяются как пилотируемые летательные аппараты (самолеты и вертолеты), так и беспилотные воздушные суда, конструкция которых должна удовлетворять требованиям ГОСТ Р 59328-2021 (подраздел 5.4).
7 Требования безопасности работ и охраны окружающей среды
7.1 При проведении работ с использованием технологий лазерного сканирования следует соблюдать требования [3].
7.2 При выполнении работ с использованием технологий лазерного сканирования непосредственно на проезжей части место проведения работ должно быть организовано в соответствии с ГОСТ Р 58350.
7.3 В процессе выполнения мобильного лазерного сканирования не допускается создание помех участникам дорожного движения.
7.4 Монтаж, демонтаж и обслуживание навесного оборудования на автомобиль должны осуществляться на ровной поверхности, при этом двигатель должен быть выключен, а автомобиль зафиксирован стояночным тормозом и противооткатными упорами.
7.5 Специалисты, выполняющие лазерное сканирование, должны соблюдать инструкции по охране труда, устанавливающие правила поведения и выполнения работ на автомобильных дорогах, разработанные с учетом требований ГОСТ 12.0.230.
7.6 Специалисты, задействованные в выполнении подготовительных работ и лазерном сканировании, должны иметь специальную одежду со светоотражающими элементами, обеспечивающую повышенную видимость в условиях проведения работ на автомобильных дорогах в соответствии с ГОСТ 12.4.281.
7.7 Базовые станции, станции сканирования, ОП и КТ, размещаемые в пределах автомобильной дороги и/или за ее пределами, не должны создавать помех движению автомобилей, пешеходов и других участников дорожного движения, а также затруднять идентификацию дорожных знаков и разметки.
8 Калибровка и поверка систем лазерного сканирования
8.1 Поверка систем лазерного сканирования осуществляется в соответствии с [4] (статья 13).
8.2 Перед началом работ должна быть выполнена необходимая юстировка систем лазерного сканирования, предусмотренная техническими и эксплуатационными руководствами производителя с соблюдением указанных в них требований и методов.
8.3 Юстировку систем лазерного сканирования следует осуществлять после выполнения регулировок конструктивных элементов системы или изменения углов ориентации измерительных устройств.
8.4 Угловая калибровка системы ВЛС должна осуществляться в соответствии с ГОСТ Р 59328-2021 (подраздел 7.3).
9 Методология проведения работ
9.1 Подготовительные работы
9.1.1 Создание съемочной геодезической сети
9.1.1.1 Съемочную геодезическую сеть в составе подготовительных работ при проектном технологическом процессе создают для обеспечения привязки результатов лазерного сканирования к системам координат, повышения точности и контроля результатов лазерного сканирования, а также для объединения (сшивки) смежных облаков ТЛО.
Созданная съемочная геодезическая сеть в составе подготовительных работ при проектном технологическом процессе должна быть представлена в системе координат и высот, указанных в техническом задании на проведение съемки с помощью систем лазерного сканирования и (или) программе работ по лазерному сканированию. Съемку с помощью систем лазерного сканирования необходимо выполнять с использованием государственных, местных, локальных и международных систем координат, государственной системы высот и государственной гравиметрической системы [5]. В случае необходимости установления локальной системы координат требования к ней разрабатываются в программе работ по лазерному сканированию в соответствии с техническим заданием на проведение съемки с помощью систем лазерного сканирования.
9.1.1.2 Для создания сети съемочного обоснования в качестве исходных используют следующие пункты:
- ГГС;
- ГНС;
- ОГС;
- ВОГС;
- ССДС, включенных в федеральный фонд пространственных данных.
9.1.1.3 Состав СГС согласно рисунку 3 состоит из следующих элементов:
- базовые станции;
- станции сканирования;
- ОП;
- КТ.
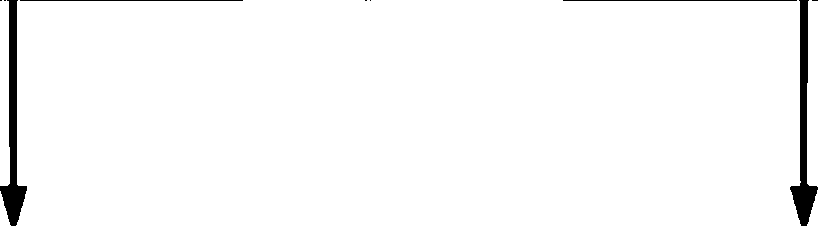 |
Рисунок 3 - Схема развития съемочной геодезической сети
9.1.1.4 Построение СГС необходимо осуществлять методами полигонометрии, геометрического нивелирования, основываясь на требованиях нормативно-технической документации в зависимости от технологии работ, спутниковыми определениями координат по ГОСТ Р 53606 и другими методами, обеспечивающими точность в соответствии с ГОСТ 32869-2014 (раздел 11).
9.1.1.5 В качестве средств для геодезических спутниковых наблюдений на базовых станциях допускается использовать как одиночные спутниковые ГНСС приемники, так и приемники, входящие в состав сетей дифференциальных геодезических станций.
9.1.1.6 Закладку пунктов базовых станций выполняют в соответствии со следующими требованиями:
- наличие приема сигналов спутникового ГНСС приемника при угле маски возвышения не более 15°;
- отсутствие в пределах 50 м устройств, работа которых оказывает негативное воздействие на качество приема спутниковых сигналов;
- при расчете расстояния между смежными базовыми станциями следует принимать во внимание размещаемые ОП и КТ на протяжении всего участка работ в соответствии с требованиями 9.1.1.8-9.1.1.11. Таким образом, при проведении ГНСС-измерений ориентировочное СКП планового и высотного положения ОП и КТ должно рассчитываться в соответствии с требованиями ГОСТ Р 53606-2009 (пункт 7.3.7), исходя из которых определяется расстояние до базовых станций;
- расстояние между смежными базовыми станциями не должно превышать 60 км.
9.1.1.7 Выбор места расположения станции сканирования должен быть обусловлен соблюдением следующих факторов:
- следует обеспечить взаимную видимость между двумя смежными станциями сканирования минимум трех ОП и одной КТ на обоих облаках ТЛО;
- потенциальное место расположения станций сканирования не должно влиять на безопасность дорожного движения;
- при выполнении сканирования без использования ОП и КТ станции сканирования следует закреплять на местности или предметах, обеспечивающих сохранность, долговечность и устойчивость планового и высотного положения;
- следует учитывать особенности местности и расположение объектов и сооружений, способствующих возникновению теневых (слепых) зон в процессе лазерного сканирования.
9.1.1.8 Размещение ОП и КТ должно соответствовать следующему ряду общих критериев:
- в качестве ОП и КТ следует использовать опознаки различного исполнения: плоские и объемные (рекомендуемые типы приведены в приложении А);
- при совместном использовании различных видов систем лазерного сканирования выбор места размещения ОП и КТ должен обеспечивать одновременную видимость в процессе лазерного сканирования, при этом геометрические контуры ОП и КТ должны достоверно идентифицироваться на облаке ТЛО;
- в соответствии с рисунком 4 ОП и КТ не должны находиться в одной плоскости;
- между ОП, КТ и системой лазерного сканирования должна быть прямая видимость;
- ОП и КТ не должны нарушать идентификацию дорожных знаков и разметки;
- в соответствии с рисунком 5 и требованиями 9.1.1.9 размещение плоских типов марок, используемых в качестве ОП и КТ, следует выполнять на расстоянии не более 1 м от кромки автомобильной дороги.
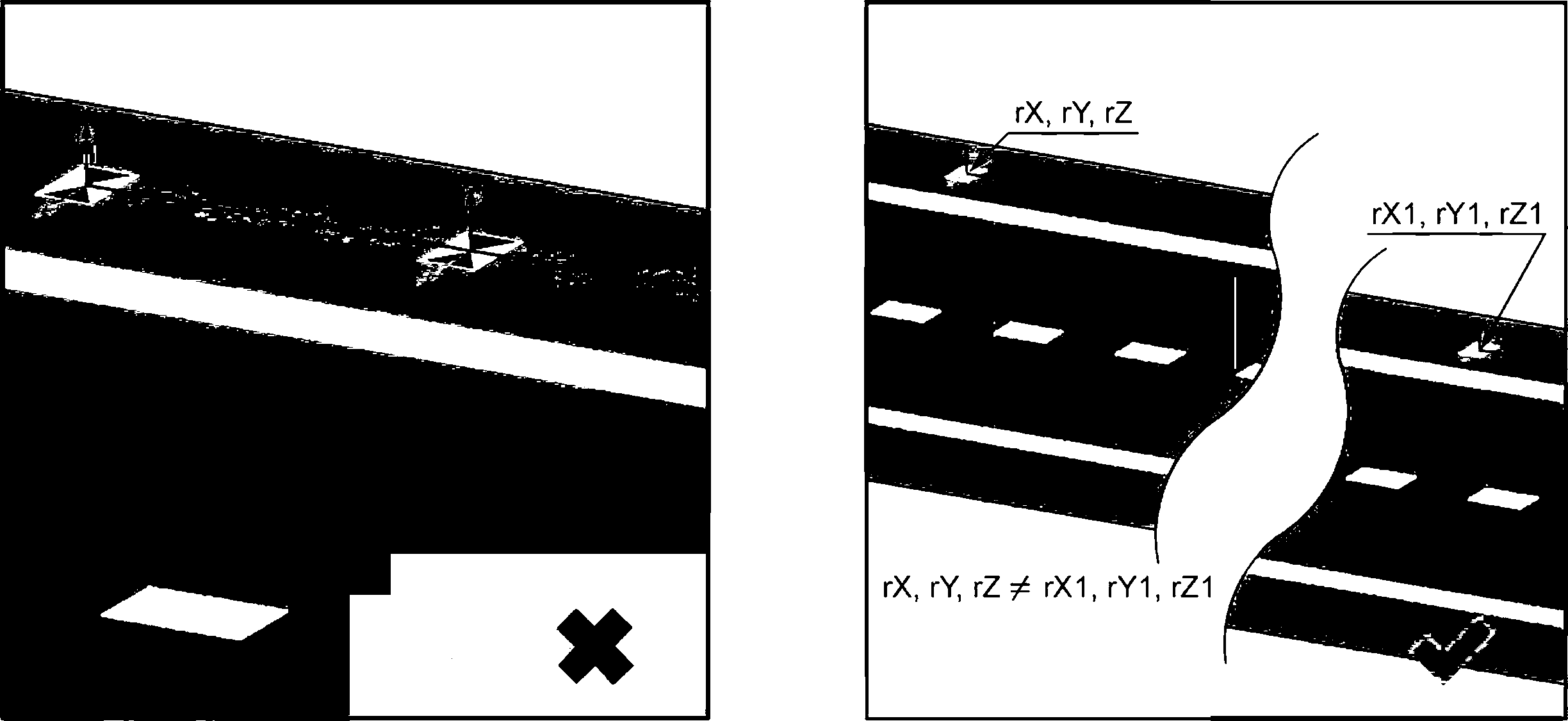 |
Рисунок 4 - Способ размещения ОП и КТ
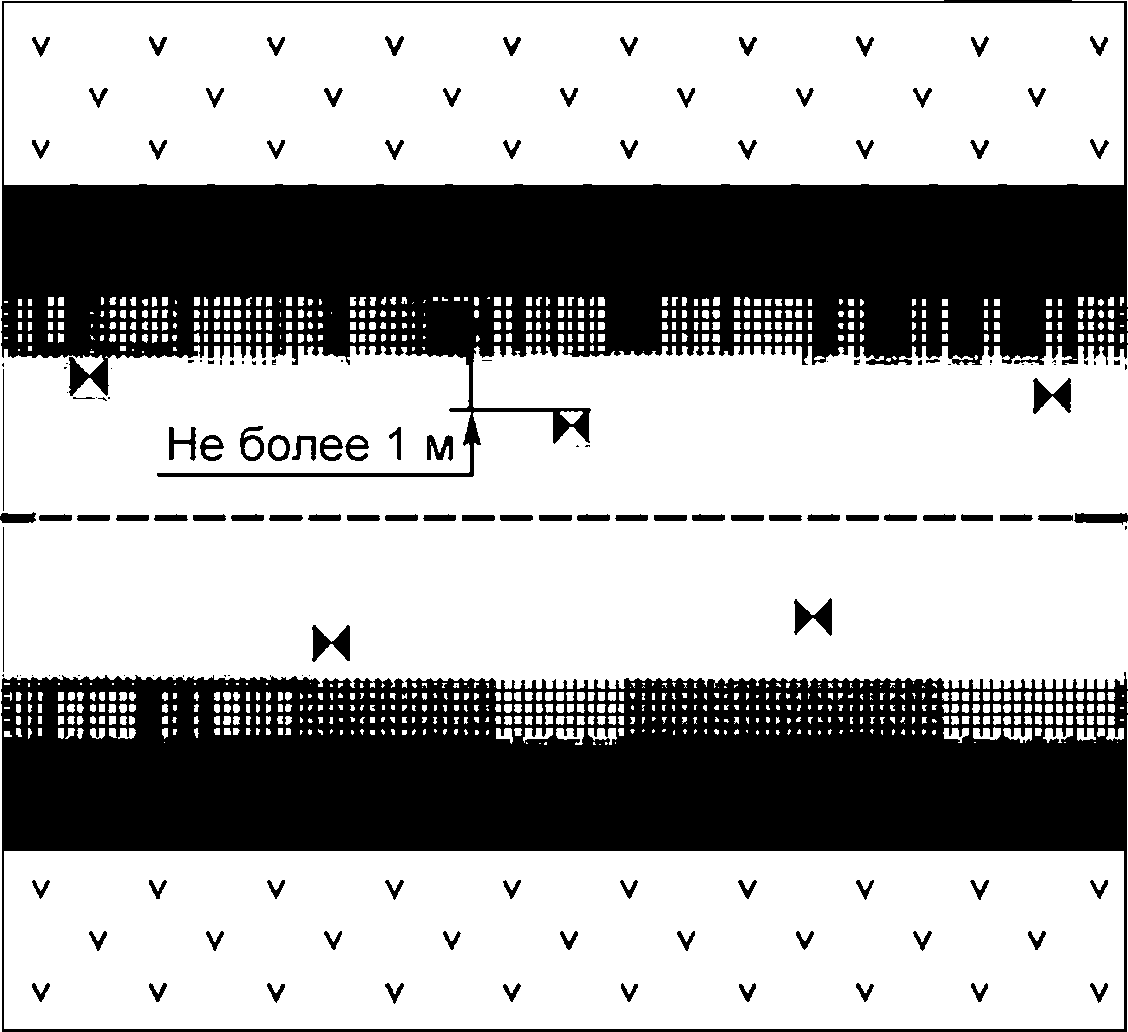 |
Рисунок 5 - Схема расположения ОП и КТ
9.1.1.9 Требования к размещению ОП и КТ для мобильного лазерного сканирования при проектном технологическом процессе представлены в таблице 1.
Таблица 1 - Условия размещения ОП и КТ при мобильном лазерном сканировании
Особенности объекта измерений | Условия размещения |
Проезжая часть имеет по одной полосе в каждом направлении движения | С шагом не более 400 м, чередуя по полосам направления движения в шахматном порядке |
Количество полос движения три и более | С шагом не более 400 м на каждой стороне движения в створе друг с другом |
Радиус скругления до 100 м | Шаг не более 50 м, чередуя стороны внешнего и внутреннего радиусов, а также по одному в начале и конце скругления |
Радиус скругления от 100 до 300 м | Шаг не более 100 м, чередуя стороны внешнего и внутреннего радиусов, а также по одному в начале и конце скругления |
Радиус скругления более 300 м | Шаг не более 200 м, чередуя стороны внешнего и внутреннего радиусов, а также по одному в начале и конце скругления |
Резкий перепад высот покрытия | Дополнительно в начале и конце участка, а также в местах с наименьшей (наибольшей) отметкой |
Потенциальные места потери спутникового сигнала | На расстоянии от 50 до 100 м перед и после участка, а также непосредственно на самом участке шагом не более 50 м |
9.1.1.10 В случае использования систем МЛС при выполнении работ, относящихся к общему технологическому процессу, размещение ОП и КТ обязательно в местах совмещения смежных проездов системы МЛС, выполненных от соседних базовых станций. Согласно 9.2.3.10 при соблюдении технологии выполнения измерений с помощью систем МЛС количество размещаемых ОП должно составлять не менее 3 шт. с шагом не менее 50 м и не менее 2 шт. КТ в начале и конце участка перекрытия. При размещении опознаков на участке перекрытия с перекрестком количество размещаемых ОП должно быть не менее 3 шт. и не менее 2 шт. КТ.
9.1.1.11 При выполнении работ, где в качестве измерительного средства выступает система ВЛС, при размещении ОП и КТ необходимо соблюдать следующие требования:
- место расположения ОП и КТ не должно располагаться на поверхностях с изломанным рельефом;
- в месте размещения ОП и КТ не должно быть высокой растительности, а также древесно-кустарниковых насаждений;
- для получения данных, соответствующих проектному технологическому процессу, ОП следует размещать в зоне проведения работ на расстоянии не более 400 м друг от друга, чередуя стороны относительно оси автомобильной дороги в шахматном порядке, и КТ на расстоянии не более 1 км для общего технологического процесса, по 1 шт. ОП и КТ на каждые 4 км оси.
9.1.2 Требования к типам закрепления и конструкциям пунктов СГС
9.1.2.1 Конструкция и тип закрепления пунктов СГС определяется в соответствии с видом технологического процесса (таблица 2).
Таблица 2 - Тип закреплений пунктов СГС
Пункт СГС | Технологический процесс | Тип закрепления | Закладка и закрепление |
Базовая станция | Проектный | Долговременный, постоянный | В соответствии с [6] |
Общий | Временный | В соответствии с [6] | |
Станция сканирования | Проектный | Долговременный, постоянный, временный | В соответствии с [6]; временный тип закрепления допускается в исключительных случаях ввиду расположения станций сканирования на асфальтобетонном, бетонном, каменном или металлическом покрытии |
Общий | Временный | В соответствии с [6] | |
ОП | Проектный | Временный | Приведен в приложении А |
Общий | Приведен в приложении А | ||
КТ | Проектный | Временный | Приведен в приложении А |
Общий | Приведен в приложении А |
9.1.2.2 Конструкция и способ закладки ОП и КТ должны удовлетворять следующим требованиям:
- центр опознака должен иметь правильную геометрическую форму и беспрепятственно идентифицироваться на облаке ТЛО;
- опознак должен иметь сухую и чистую поверхность;
- допускается использование пленок-отражателей на самоклеящейся основе для размещения на наклонных и вертикальных поверхностях искусственных сооружений и объектах дорожной инфраструктуры;
- допускается использовать в качестве закрепительных средств трафарет и краску (минимальное количество слоев краски должно быть не менее двух как при нанесении аэрозольным баллончиком, так и при использовании кисти или валика);
- цвета центра опознака ОП и КТ должны иметь контраст на фоне места закладки;
- допускается использовать в качестве ОП и КТ предметы местности, имеющие ярко выраженные контуры, которые возможно идентифицировать на облаке ТЛО: люки, дорожная разметка и т.д.
9.1.2.3 Размеры ОП и КТ могут изменяться в зависимости от вида задач и используемой системы лазерного сканирования. В качестве ОП и КТ допускается использовать контуры характерных элементов местности, таких как дорожная разметка, дорожные знаки, инженерно-технические сооружения, здания и другие.
9.1.3 Требования к содержанию технического задания на проведение съемки с помощью систем лазерного сканирования
9.1.3.1 Техническое задание на проведение съемки с помощью систем лазерного сканирования формируют в зависимости от вида работ как самостоятельный документ или раздел технического задания на проведение инженерных изысканий по ГОСТ 32869-2014 (подраздел 4.3).
9.1.3.2 При проведении работ, не входящих в состав инженерных изысканий, техническое задание должно содержать следующие общие данные и сведения:
- наименование объекта и его описание (место и границы проведения работ), геометрические характеристики (протяженность, площадь), а также технические характеристики в соответствии с действующей нормативно-технической документации (категория автомобильной дороги, количество полос движения, тип мостового сооружения, количество пролетных строений и др.);
- ситуационный план (схема) участка работ с указанием границ, точек начала и окончания участка автомобильной дороги, контуров искусственных сооружений и т.д.;
- целевое назначение (ремонт, капитальный ремонт, реконструкция, строительство, кадастровые работы, диагностика и мониторинг, строительный контроль и др.);
- требования к назначению работ по ГОСТ Р 70690;
- сведения о системе координат и высот;
- требования к составу и формату данных лазерного сканирования в соответствии с ГОСТ Р 70690;
- требования к данным, полученным дополнительными измерительными средствами (фотоматериалы, тепловые карты и др.);
- требования к точности результатов лазерного сканирования;
- требования к плотности облака ТЛО;
- дополнительные и (или) специальные требования.
9.1.3.3 Техническое задание на выполнение работ с применением системы НЛС кроме общих требований должно содержать требования к созданию СГС, включающей в себя станции сканирования, ОП и КТ.
9.1.3.4 При использовании системы МЛС минимальный перечень требований к техническому заданию состоит из следующих позиций:
- минимальная ширина сканирования;
- минимальная область перекрытия между параллельными проездами, %;
- требования к созданию СГС, состоящей из базовых станций, ОП и КТ.
9.1.3.5 При использовании системы ВЛС минимальный перечень требований к техническому заданию состоит из следующих позиций:
- минимальная ширина сканирования;
- минимальная область перекрытия между параллельными пролетами, %;
- высота и скорость полета;
- требования к созданию СГС, состоящей из базовых станций, ОП и КТ;
- требования к фотоматериалам (разрешение снимка).
9.1.4 Требования к составу программы работ по лазерному сканированию
9.1.4.1 Программу работ по лазерному сканированию формируют как самостоятельный документ или раздел программы инженерных изысканий в соответствии с ГОСТ 32869-2014 (подраздел 4.4).
9.1.4.2 В состав самостоятельного документа программы работ по лазерному сканированию необходимо включить следующие сведения:
- информацию о методах развития СГС, количестве и типе пунктов СГС, а также схему их расположения;
- информацию об используемом оборудовании и средствах измерения, с помощью которых осуществляется развитие СГС, а также проведение измерений;
- параметры лазерного сканирования, дальность лазерного сканирования, скорость движения транспортного средства или летательного аппарата, высота полета, а также способ исчисления высоты (абсолютная или относительная), расстояния между пролетами (при параллельном галсировании), запись фото (при необходимости), интервал фотосъемки (время или расстояние);
- информацию о методе и последовательности проведения измерений;
- данные о средствах и способах проведения камеральных работ;
- сведения о проведении внутреннего контроля качества и точности пространственных данных;
- требования к составу отчетной документации, составу и формату данных лазерного сканирования, специальные требования к данным;
- информацию о способе передачи данных и приемке выполненных работ.
9.2 Производство работ
9.2.1 Общие требования
9.2.1.1 Технология и методика проведения работ с использованием систем лазерного сканирования не должна противоречить требованиям и эксплуатационным руководствам производителя оборудования.
9.2.1.2 В зависимости от вида технологического процесса следует провести соответствующие работы по развитию СГС.
9.2.1.3 Перед началом измерений следует провести рекогносцировочное обследование места производства работ, определить места размещения базовых станций, станций сканирования, ОП и КТ с последующим составлением их абрисов.
9.2.1.4 В процессе выполнения измерений следует исключать вероятность влияния внешних факторов на качество получаемой пространственной информации. К таким факторам относятся рефракция, осадки в виде капель дождя, снег, сильный ветер, способствующий поднятию частиц пыли в воздух, туман и т.д.
9.2.1.5 Досъемку теневых участков выполняют в соответствии с 9.3.
9.2.1.6 При подборе параметров лазерного сканирования следует руководствоваться рекомендациями производителя оборудования и обеспечить необходимую плотность облака ТЛО в соответствии с ГОСТ Р 70690-2023 (пункт 5.9).
9.2.1.7 Точность облака ТЛО должна удовлетворять требованиям к результату выполняемых работ, соответствующих этапам жизненного цикла автомобильных дорог по ГОСТ Р 70690-2023 (таблица 3).
9.2.1.8 При проведении лазерного сканирования на специфических и уникальных участках работ, таких как городская застройка, а также в местах с резкими перепадами высот необходимо учитывать следующие аспекты:
- в условиях городской застройки следует принимать во внимание тип застройки и наличие объектов, способных оказывать влияние на качество спутникового позиционирования (деревья, рекламные щиты и т.д.); также для уменьшения количества образования теневых зон на облаке ТЛО следует выполнять лазерное сканирование в такой период времени, при котором количество источников возникновения теневых зон будет минимально; при выборе мест размещения и количества ОП и КТ следует исходить из типа застройки;
- на участках с резкими перепадами высот следует учитывать расстояние до базовых станций с учетом типа рельефа, а также потенциальное негативное воздействие на спутниковое позиционирование из-за оборудования, установленного на транспортных средствах.
9.2.1.9 При совмещении облаков ТЛО, полученных с помощью различных видов систем лазерного сканирования, следует разделять облака ТЛО на каркасные и дополнительные. Каркасные облака ТЛО получают в результате проведения работ системой лазерного сканирования, выбранной в качестве основного средства измерений. Дополнительные ТЛО формируются в результате использования иных систем лазерного сканирования. Таким образом, дополнительные облака ТЛО следует совмещать с каркасным облаком ТЛО с помощью ОП.
9.2.2 Наземное лазерное сканирование
9.2.2.1 Наземное лазерное сканирование используют в качестве основного метода лазерного сканирования для выполнения работ, требующих высокой точности и детальности облака точек на небольших по площади или протяженности объектах. В качестве вспомогательного метода систему НЛС применяют для досъемки теневых зон, возникших при проведении мобильного и воздушного лазерного сканирования.
9.2.2.2 При выполнении наземного лазерного сканирования сканы следует разделять на "каркасные" и "дополнительные".
Каркасные сканы выполняют в виде системы линейно-протяженных ходов. Процент перекрытия облаков ТЛО каркасных сканов должен составлять не менее 30% (см. рисунок 6).
К дополнительным относят сканы, выполняемые для устранения теневых зон и повышения детализации объекта сканирования. Процент перекрытия облаков ТЛО дополнительных сканов должен составлять не менее 20%.
 |
Условные обозначения: | |||
- ОП и (или) КТ; | - область перекрытия между каркасными сканами, не менее 30%; | ||
- каркасный скан; | - область перекрытия между дополнительными сканами, не менее 20%; | ||
- дополнительный скан; | - область перекрытия между каркасными и дополнительными сканами, не менее 30% | ||
Рисунок 6 - Схема съемки с помощью системы НЛС
Расстояние между местами установки системы НЛС выбирают исходя из технических параметров сканирующей системы с учетом обеспечения необходимого перекрытия сканов для удовлетворения требований к результату работ и плотности облака ТЛО согласно ГОСТ Р 70690-2023 (таблица 3 и пункт 5.9).
К дополнительным относят сканы, выполняемые для устранения теневых зон и повышения детализации объекта сканирования. Процент перекрытия облаков ТЛО для дополнительных сканов должен составлять не менее 20% и не менее 30% - для каркасных сканов.
9.2.2.3 Для объединения сканов в области их перекрытия следует разместить не менее трех ОП и не менее двух КТ.
Также допускается объединение сканов в ПО в автоматическом режиме (по общим плоскостям поверхностей объектов местности).
9.2.2.4 При объединении сканов, полученных при использовании системы НЛС, со сканами, полученными при использовании систем МЛС и ВЛС, следует использовать не менее трех ОП и не менее двух КТ.
9.2.3 Мобильное лазерное сканирование
9.2.3.1 Мобильное лазерное сканирование используют в качестве основного метода лазерного сканирования для выполнения работ, требующих высокой точности и детальности облака точек на линейных объектах. В качестве вспомогательного метода систему МЛС применяют для досъемки теневых зон, искусственных и мостовых сооружений, а также для досъемки твердых покрытий и элементов при проведении воздушного лазерного сканирования.
9.2.3.2 Перед началом и в конце работ необходимо выполнить инициализацию в соответствии с рекомендациями производителя системы лазерного сканирования.
В общем случае период выполнения статических наблюдений должен составлять не менее 5 минут, а последующее движение должно осуществляться по восьмиобразной траектории, с ускорением и торможением (см. рисунок 7).
 |
Рисунок 7 - Траектория движения в форме восьмерки
9.2.3.3 Инициализацию необходимо выполнять на участке с благоприятными условиями для приема спутникового сигнала и вдали от возможных источников электромагнитных помех.
9.2.3.4 В зависимости от требований задания на проведение измерений с помощью системы МЛС, категории автомобильной дороги и выбранного технологического процесса количество проездов может изменяться (в соответствии с таблицей 3).
Таблица 3 - Требования к минимальному количеству проездов по автомобильным дорогам
Техноло- гический процесс | Количество полос движения | Наличие разделительной полосы или барьерного ограждения | Количество проездов | Условия проездов |
Проектный | Не более одной | Да/нет | Не менее одного | Для каждого из направлений |
Две | Да/нет | Кратное количеству полос | Для каждого из направлений | |
Три и более | Да/нет | Не менее двух | Проезды должны быть выполнены по внешним и внутренним полосам, для каждого из направлений. | |
Съезды и примыкания | - | - | Не менее 50 м | |
Общий | Не более двух | Да | Не менее одного | Для каждого из направлений |
Не более двух | Нет | Не менее одного | Для каждого из направлений | |
Три и более | Да/нет | Не менее четырех | Для каждого из направлений | |
Съезды и примыкания | - | - | При наличии требований в задании |
9.2.3.5 В зависимости от требования задания на проведение лазерного сканирования количество проездов может быть увеличено.
9.2.3.6 Не допускается движение задним ходом при выполнении лазерного сканирования.
9.2.3.7 Для возможности корректного уравнивания траектории движения данные необходимо записывать в одном проекте (миссии), но отдельными проездами и по возможности избегать самопересечений траектории в процессе сбора данных (см. рисунок 8).
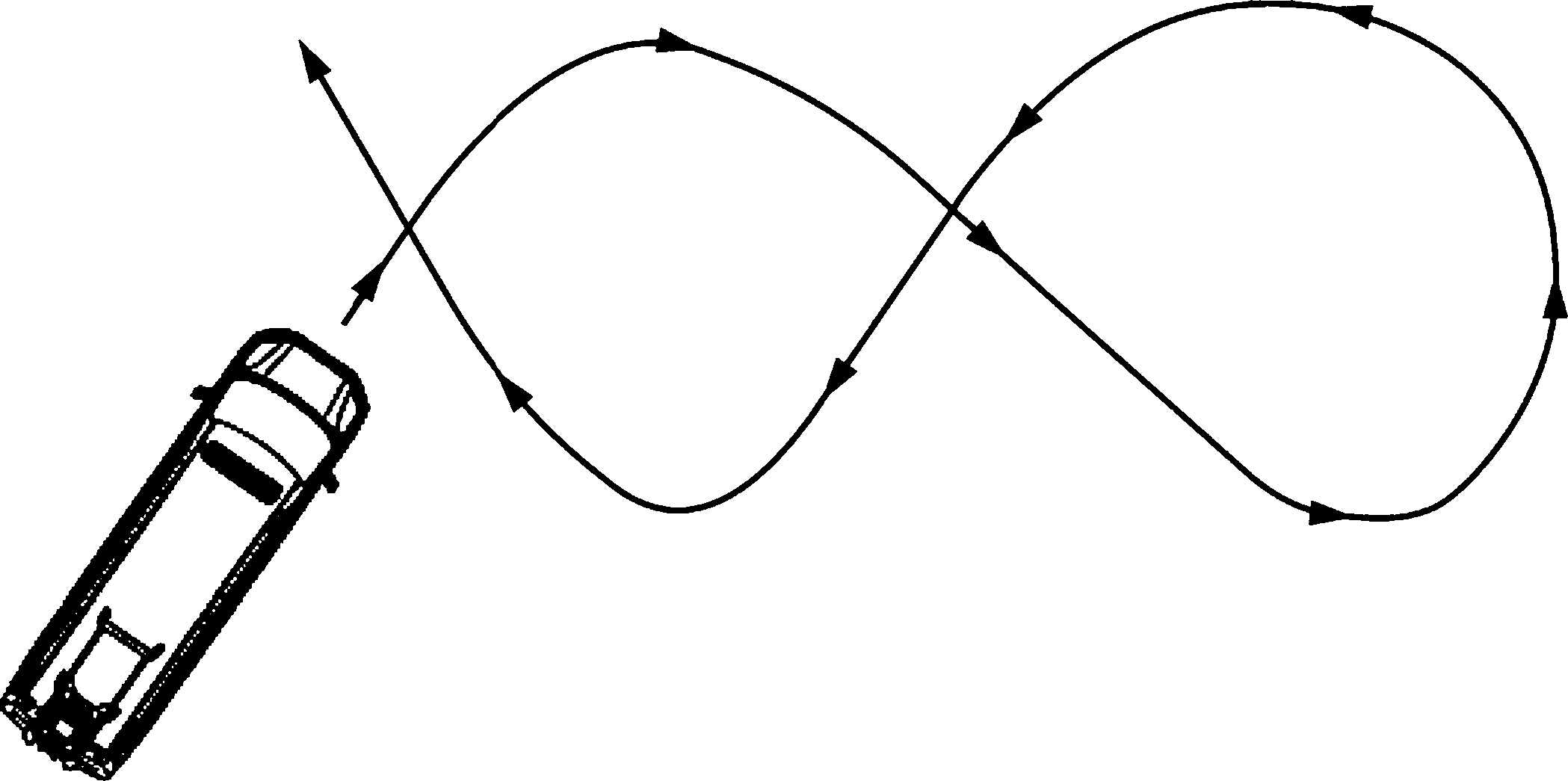 |
Рисунок 8 - Схема проездов при мобильном лазерном сканировании
9.2.3.8 Область перекрытия между смежными сканами должна составлять не менее 30% в случае, когда проезды выполняются по одной проезжей части либо по проезжим частям, находящимся в одном уровне, а также с разделительной полосой менее 30 м, не содержащей при этом объекты, ограничивающие прямую видимость (см. рисунок 9). В остальных случаях область перекрытия между соседними сканами должна обеспечивать возможность их взаимного уравнивания и контроля результатов лазерного сканирования.
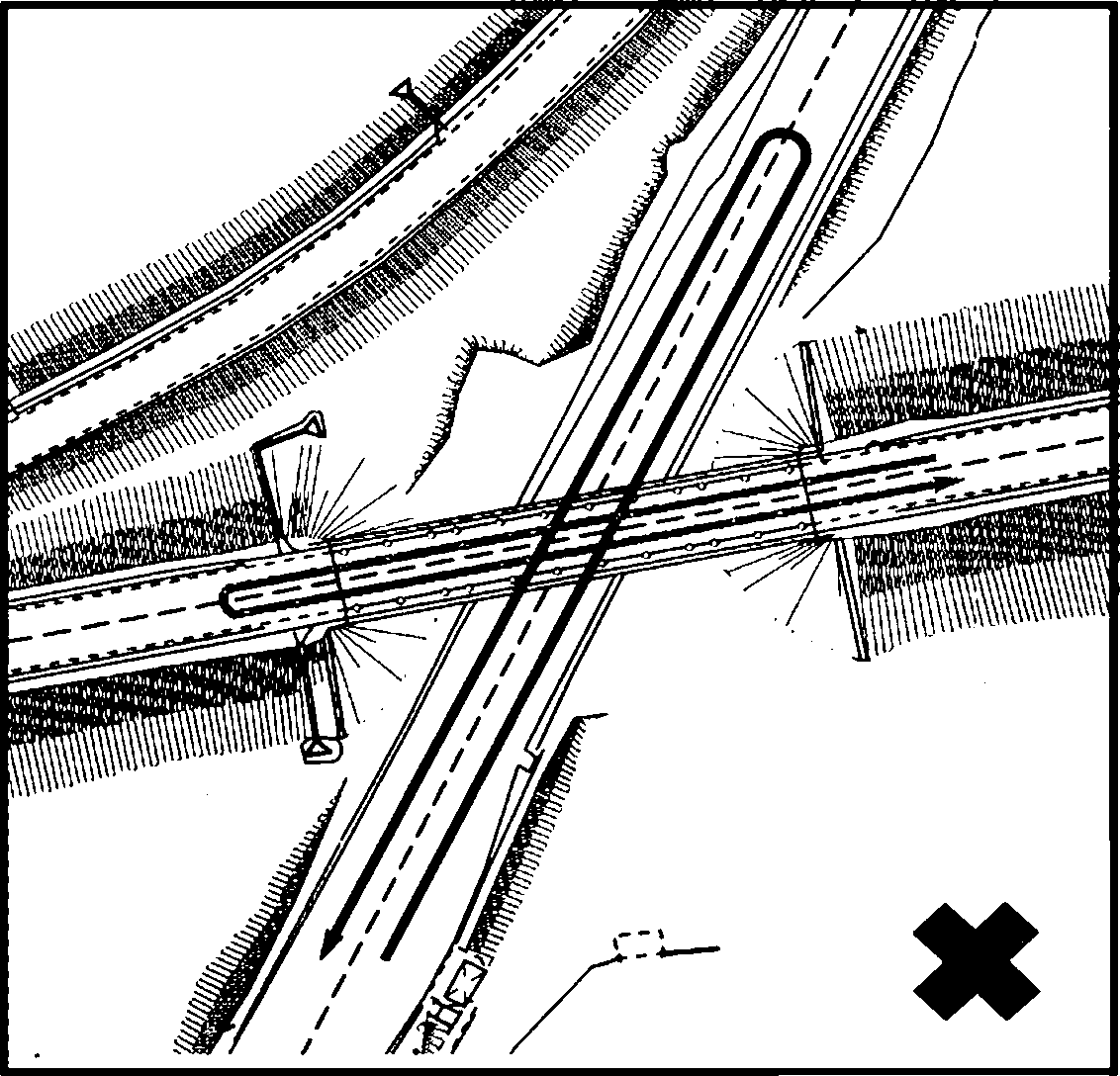 |
Рисунок 9 - Область перекрытия между соседними сканами
9.2.3.9 В процессе лазерного сканирования удаление от базовой станции не должно превышать 20 км для работ проектного и 60 км для работ общего технологического процесса.
9.2.3.10 Для объединения смежных проездов, выполняемых в рамках технологического процесса "общий", необходимо обеспечить их перекрытие. Участок перекрытия должен быть от 100 метров, а в случае отсутствия контуров характерных элементов местности участок перекрытия должен быть увеличен.
Для объединения смежных проездов, выполняемых в рамках технологического процесса "проектный", необходимо обеспечить их перекрытие. Участок перекрытия должен быть от 100 м и содержать не менее 4 ОП и КТ, входящих в СГС.
9.2.3.11 Настройки системы лазерного сканирования должны соответствовать требованиям к полученным результатам в соответствии с ГОСТ Р 70690.
9.2.3.12 Необходимо исключить движение с параллельно движущимся транспортным средством, а также сзади едущим транспортным средством на расстоянии менее 5 м.
9.2.3.13 Дискретность записи спутниковых статических измерений базовой станции должна быть не реже 1 Гц.
9.2.3.14 Для проектного технологического процесса необходимо провести досъемку рельефа в местах с густой и высокой растительностью для определения истинной отметки рельефа согласно 9.3.
9.2.4 Воздушное лазерное сканирование
9.2.4.1 Работы, проводимые с помощью систем ВЛС, следует выполнять в соответствии с [7].
9.2.4.2 При планировании траектории движения системы ВЛС оператор должен учитывать внешние факторы, влияние которых может привести к повреждениям (утрате) оборудования.
9.2.4.3 В процессе инициализации выполняют статические наблюдения, затем после взлета летательный аппарат должен выполнить полет по восьмиобразной траектории в соответствии с ГОСТ Р 59328-2021 (приложение В).
9.2.4.4 Участок проведения инициализации должен иметь благоприятные условия для приема спутникового сигнала.
9.2.4.5 Дискретность записи спутниковых статических измерений базовой станции должна быть не реже 1 Гц.
9.2.4.6 Процесс выполнения ВЛС не должен противоречить требованиям, предъявляемым инструкцией по эксплуатации оборудования, а также ГОСТ Р 59328-2021 (пункт 8.1.5).
9.2.4.7 При проведении аэрофотосъемки совместно с воздушным лазерным сканированием методика выполнения измерений должна соответствовать ГОСТ Р 59562 и ГОСТ Р 59328-2021 (подраздел 8.1).
9.2.4.8 Для проектного технологического процесса необходимо провести досъемку рельефа в местах с густой и высокой растительностью для определения истинной отметки рельефа согласно 9.3.
9.2.4.9 Процент перекрытия между смежными пролетами при выполнении воздушного лазерного сканирования должен составлять не менее 20%.
9.3 Порядок выполнения досъемочных работ методом НЛС
9.3.1 Досъемочные работы методом НЛС следует выполнять:
- для исключения теневых зон, получения отметок рельефа, а также уточнения ситуации согласно ГОСТ 32869-2014 (подраздел 9.2);
- для проведения геодезических измерений, входящих в состав инженерно-гидрографических и гидроморфометрических работ, согласно ГОСТ 32869-2014 (подраздел 9.8);
- для съемки подземных, наземных и надземных инженерных коммуникаций согласно ГОСТ 32869-2014 (подраздел 9.6).
9.3.2 Досъемочные работы должны выполняться от исходных пунктов развития СГС и/или непосредственно от пунктов СГС.
10 Обработка результатов измерений
10.1 После сбора пространственных данных требуется проведение первичной обработки данных с последующим контролем.
10.2 Первичная обработка пространственных данных должна состоять из следующих действий:
- проверки целостности и корректности записи данных системы лазерного сканирования;
- уравнивания тахеометрических и нивелирных ходов;
- уравнивания спутниковых статических и кинематических наблюдений;
- оценки качества спутниковых ГНСС-наблюдений в соответствии с ГОСТ Р 57371-2016 (раздел 6);
- уравнивания траекторий движения систем лазерного сканирования при использовании систем МЛС и ВЛС;
- проведения анализа результатов выполненных уравниваний с последующим отражением в техническом отчете выполненных работ.
10.3 По завершении первичной обработки требуется проведение последующей камеральной обработки данных, которая должна включать:
- формирование облаков ТЛО из внутренних форматов системы лазерного сканирования;
- объединение разных облаков ТЛО в единое облако ТЛО;
- привязку облаков ТЛО к требуемым системам координат, указанным в техническом задании;
- фильтрацию облака ТЛО от шумов;
- классификацию облака ТЛО в соответствии с требованиями ГОСТ Р 70690;
- формирование данных в соответствии с требованиями ГОСТ Р 70690.
10.4 Программный комплекс, используемый для обработки результатов лазерного сканирования, должен включать:
- уравнивание траектории движения системы лазерного сканирования (для МЛС и ВЛС);
- функцию просмотра облака ТЛО;
- функцию регистрации (сшивки) смежных облаков ТЛО;
- функцию присвоения цветового атрибута облаку ТЛО по фото (при необходимости);
- возможность экспорта облака ТЛО.
11 Контроль результатов измерений
11.1 По завершении измерений с помощью систем лазерного сканирования оператор должен провести анализ собранных данных на предмет целостности записи данных, если функциональность системы предусматривает такую возможность.
11.2 Объем полевого контроля должен составлять не менее 5% площади съемки. В перечень элементов, подлежащих полевому контролю, обязательно включают:
- покрытие автомобильной дороги;
- элементы застройки (жесткие контуры, хорошо читаемые на местности);
- элементы мостовых сооружений на пересечении искусственных и естественных препятствий;
- участки распространения опасных геологических процессов;
- участки со сложным и изломанным рельефом.
11.3 В качестве контроля результатов лазерного сканирования следует закоординировать КТ, хорошо различимые объекты местности или дорожную разметку по средствам использования спутникового ГНСС-приемника или тахеометра и провести сравнение с облаком ТЛО. Результаты проведенного сравнения должны удовлетворять требованиям к точности измерений, соответствующих виду работ.
11.4 Дополнительно следует провести сравнение не менее пяти поперечных сечений, показывающих различия между поверхностями, созданными на основе уравненного облака точек, с поперечными сечениями, полученными в результате независимых измерений равной или более высокой точности, по средствам использования спутникового ГНСС-приемника или тахеометра.
11.5 Результаты полевого контроля фиксируют в акте полевого контроля в соответствии с приложением Б.
12 Оформление результатов измерений
12.1 По завершении работ по лазерному сканированию составляют технический отчет, основная часть которого включает:
- характеристику объекта лазерного сканирования;
- схему объекта со станциями сканирования и/или траекторией движения системы лазерного сканирования;
- схему расположения ОП и КТ, использованных для уравнивания облаков ТЛО и оценки точности;
- период проведения работ и условия, при которых проводилось лазерное сканирование;
- сведения о геодезическом обеспечении работ;
- сведения о применяемых средствах измерений;
- сведения о параметрах настройки систем лазерного сканирования, при которых проводились измерения;
- описание методологии проведения измерений;
- информацию о контроле результатов измерений.
Оформлять технический отчет следует в соответствии с требованиями ГОСТ Р 21.301.
12.2 Для работ, выполненных методами МЛС и ВЛС, технический отчет должен дополнительно содержать следующие сведения:
- информацию о системе координат, параметрах трансформирования системы координат и модели геоида;
- перечень использованных базовых станций с указанием информации об антенне и приемнике;
- результаты расчета траектории движения системы лазерного сканирования (при необходимости) и оценку точности;
- информацию о результатах поверки применяемых средств измерений и копии соответствующих разрешений на проведение работ (в приложении к отчету).
12.3 Данные, полученные в результате лазерного сканирования, формируют в соответствии с требованиями ГОСТ Р 70690.
12.4 Порядок передачи облаков ТЛО и носитель согласовывают с заказчиком.
Приложение А
(рекомендуемое)
Виды и типы геодезических аксессуаров и опознаков, используемых в качестве ОП и КТ
Размеры в метрах |
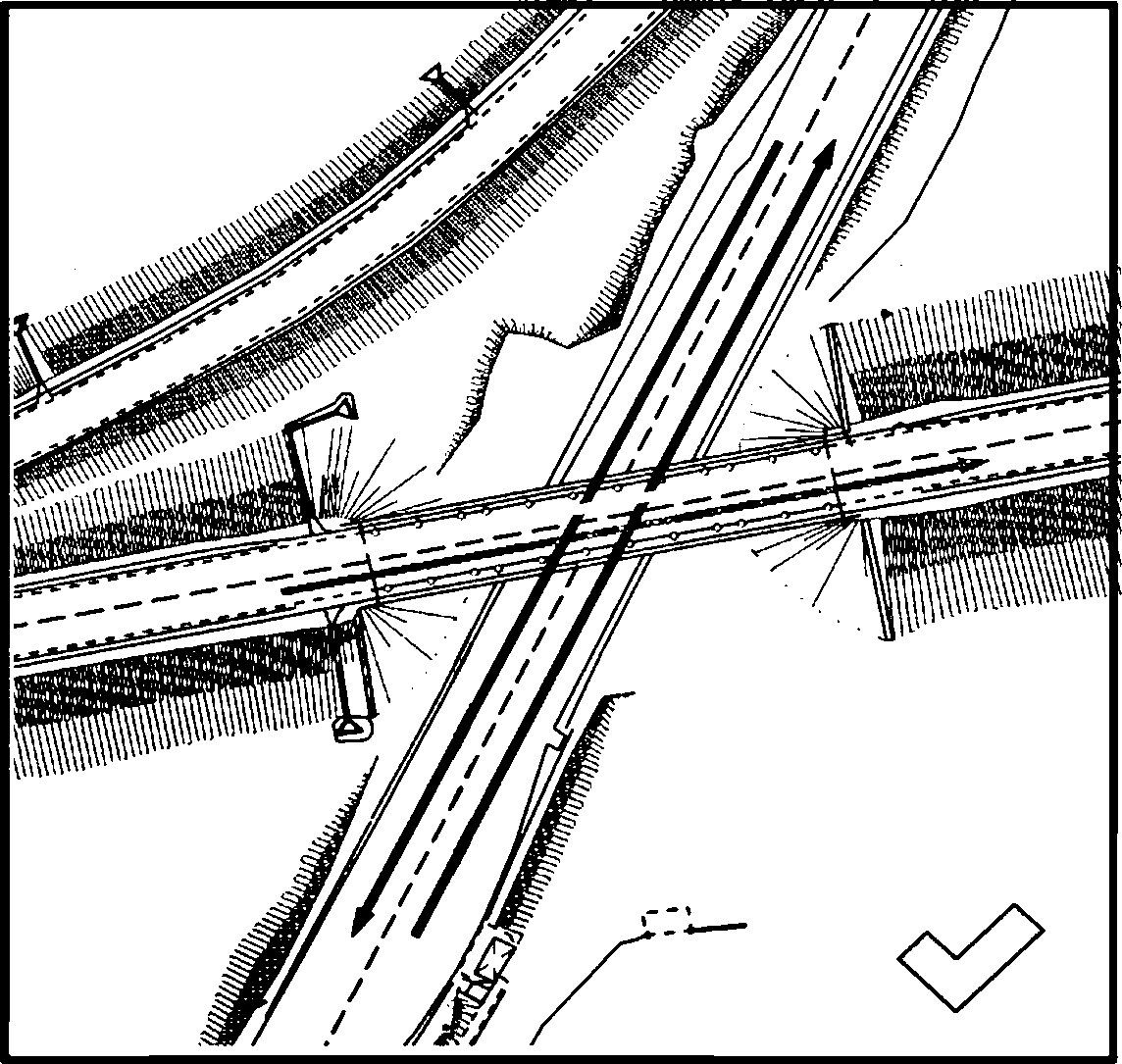 |
Рисунок А.1 - Плоский тип опознаков и аксессуаров, используемых в качестве ОП и КТ
Размеры в метрах |
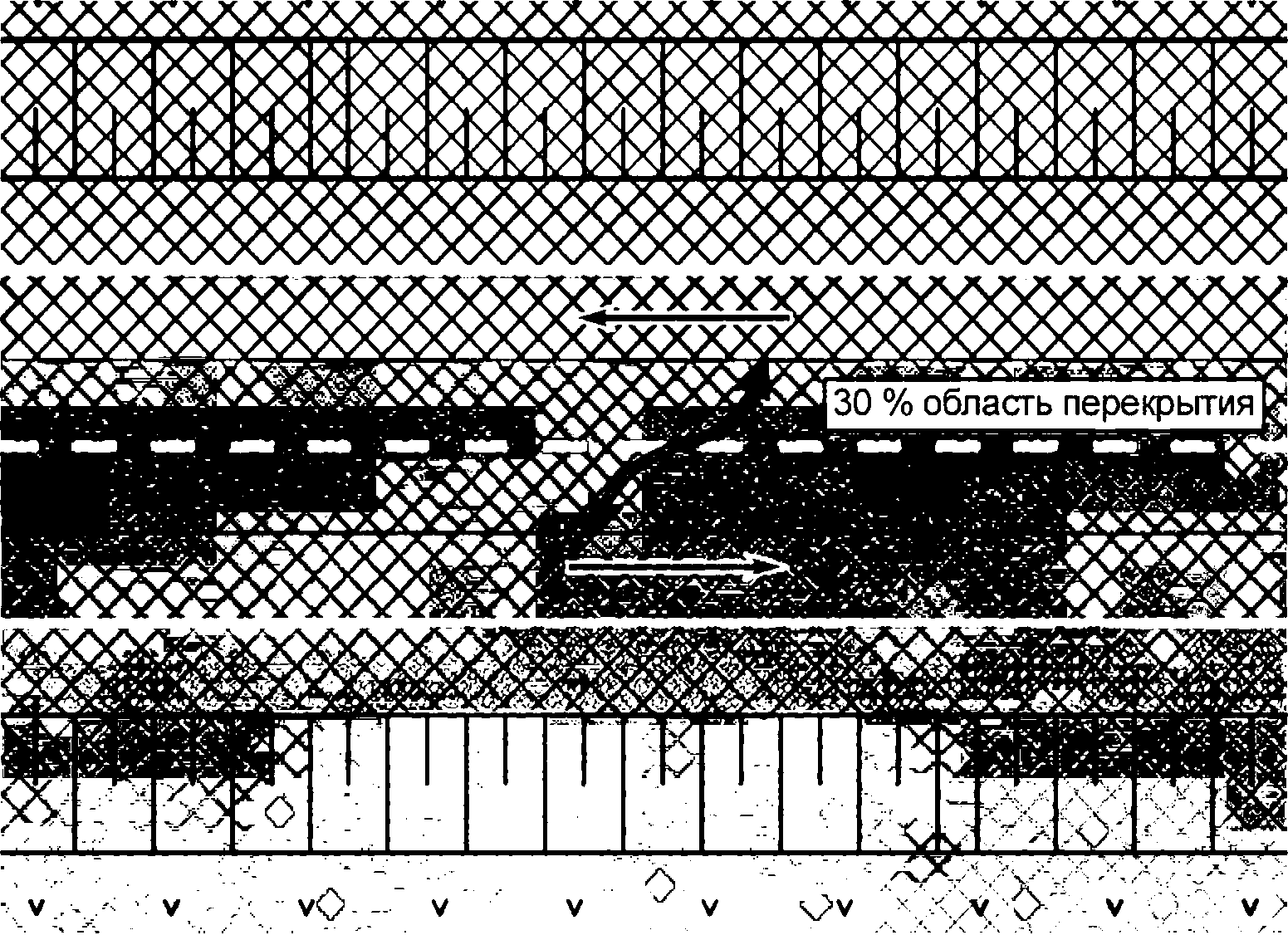 |
Рисунок А.2 - Объемный тип аксессуаров, используемых в качестве ОП и КТ
Примечание - Типы и размеры опознаков определяются исполнителем в зависимости от метода проводимых работ и параметров системы лазерного сканирования и рекомендаций производителя системы.
Приложение Б
(обязательное)
Акт по результатам контроля полевых работ
"____" ______________ 20___г. | |||||||||||||||||
Наименование объекта | |||||||||||||||||
Наименование организации | |||||||||||||||||
Акт составили: | |||||||||||||||||
(должность, Ф. И. О. контролирующего лица) | |||||||||||||||||
(должность, Ф. И. О. руководителя проверяемого подразделения) | |||||||||||||||||
При проведении контроля | |||||||||||||||||
(наименование подразделения) | |||||||||||||||||
1. Получены следующие результаты инструментального контроля: | |||||||||||||||||
Вид работ, | Объект | Объем контроля | Результаты измерений или погрешность | ||||||||||||||
результат | контроля | требуемая | фактическая | ||||||||||||||
2. Выявлены следующие недостатки: | |||||||||||||||||
3. Сделаны следующие предложения по дальнейшему ведению работ | |||||||||||||||||
Заключение о возможности использования результатов лазерного сканирования | |||||||||||||||||
/ | / | / | / | ||||||||||||||
(подпись, расшифровка) | (подпись, расшифровка) | ||||||||||||||||
Библиография
[1] | Приказ Министерства природных ресурсов и экологии Российской Федерации от 10 июля 2020 г. N 434 "Об утверждении Правил использования лесов для строительства, реконструкции, эксплуатации линейных объектов и Перечня случаев использования лесов для строительства, реконструкции, эксплуатации линейных объектов без предоставления лесного участка, с установлением или без установления сервитута, публичного сервитута" | |
[2] | Технический регламент Таможенного союза ТР ТС 018/2011 | О безопасности колесных транспортных средств |
[3] | Федеральный закон от 10 января 2002 г. N 7-ФЗ "Об охране окружающей среды" | |
[4] | Федеральный закон от 26 июня 2008 г. N 102-ФЗ "Об обеспечении единства измерений" | |
[5] | Федеральный закон от 30 декабря 2015 г. N 431-ФЗ "О геодезии, картографии и пространственных данных и о внесении изменений в отдельные законодательные акты Российской Федерации" | |
[6] | ГКИНП-07-016-91 | Правила закладки центров и реперов на пунктах геодезической и нивелирной сетей |
[7] | Постановление Правительства Российской Федерации от 11 марта 2010 г. N 138 "Об утверждении Федеральных правил использования воздушного пространства Российской Федерации" (ред. от 2 декабря 2020 г.) | |
УДК 625.72:528.421:528.721.221.6:006.354 | ОКС 07.040 |
Ключевые слова: лазерное сканирование, облако точек, наземное лазерное сканирование, мобильное лазерное сканирование, воздушное лазерное сканирование, погрешность, методика | |
{kind=link}