ГОСТ Р 53608-2009
Группа Э50
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальная навигационная спутниковая система
МЕТОДЫ И ТЕХНОЛОГИИ ВЫПОЛНЕНИЯ ГЕОДЕЗИЧЕСКИХ И ЗЕМЛЕУСТРОИТЕЛЬНЫХ РАБОТ
Разрешение неоднозначности фазовых измерений псевдодальности
Основные положения
Global navigation satellite system. Methods and technologies of geodetic and cadastral works execution. Ambiguity resolution for phase pseudo-ranges. Basic principles
ОКС 07.040
ОКСТУ 6801
Дата введения 2011-01-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 РАЗРАБОТАН 29-м Научно-исследовательским институтом Министерства обороны Российской Федерации
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. N 933-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случаях пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомления и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на методы и технологии выполнения геодезических и землеустроительных работ с использованием аппаратуры потребителей глобальной навигационной спутниковой системы.
Настоящий стандарт устанавливает методы определения целочисленных параметров измеренных фазовых псевдодальностей до космических аппаратов спутниковых систем типа GPS, выполняемую при высокоточных определениях относительных координат пунктов с использованием наблюдений космических аппаратов этих систем, при выполнении геодезических и землеустроительных работ.
2 Обозначения и сокращения
В настоящем стандарте применяют следующие сокращения:
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
КА - космический аппарат;
МНК - метод наименьших квадратов;
ПД - псевдодальность;
СКП - среднее квадратическое отклонение;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки.
3 Общие положения
3.1 Величина фазовой псевдодальности выражается в виде целого числа длин волн и дробной части длины волны. Дробная часть фазы может быть получена с высокой точностью, характеризуемой СКП на уровне первых единиц миллиметров. Прямое измерение целочисленной части фазы не представляется возможным, вследствие чего возникает неоднозначность фазовых измерений, требующая разрешения.
3.2 Разрешение неоднозначности фазовых измерений псевдодальности представляет собой процесс нахождения целого числа циклов (волн), укладывающихся в расстоянии между навигационным спутником и приемником при обработке фазовых измерений.
3.3 Для решения этой задачи с точностью, требуемой для выполнения геодезических и землеустроительных работ, применяют специальные методы математической обработки фазовых измерений, использующие при обработке не сами измерения, а их разности: первые, вторые и третьи. Это позволяет существенно уменьшить число определяемых параметров без ущерба для точности координатных определений. Основными методами разрешения неоднозначности фазовых измерений псевдодальности являются методы, базирующиеся на использовании вторых разностей фаз. Вторые разности вычисляются с использованием первых разностей фаз.
3.4 Решения, получаемые по вторым разностям фаз, как правило, позволяют при нормальных условиях наблюдений вычислить значения целочисленных параметров комбинаций измеренных фаз и на этой основе определять относительные координаты определяемых пунктов с точностью порядка первых единиц миллиметров.
3.5 Исходными данными, необходимыми для разрешения неоднозначности фазовых измерений, являются:
- фазовые измерения на двух несущих частотах для всех наблюдаемых навигационных спутников ГЛОНАСС и GPS на интервале непрерывного слежения за фазой;
- абсолютные геоцентрические координаты исходного пункта;
- предварительные координаты определяемого пункта.
4 Алгоритм разрешения неоднозначности
4.1 Предварительная обработка фазовых измерений
В измеренные значения фаз несущих вводятся поправки за влияние тропосферы, ионосферы и вращения Земли вокруг своей оси.
Поправки за влияние тропосферы вычисляются одним из существующих методов (например, методы Саастомойнена и Хопфилда). При длине измеряемого базиса не более 5 км введение поправок за тропосферу может быть пропущено.
Поправки за влияние ионосферы могут вычисляться с использованием двухчастотных синхронных измерений кодовых и фазовых псевдодальностей. Поправки за влияние ионосферы для фазовых ПД численно равны поправкам, полученным для кодовых ПД, но знаки их противоположны (поправки к кодовым ПД отрицательны, а поправки к фазовым ПД положительны). В случае измерений кодовых ПД формулы для вычисления этих поправок соответственно на первой и второй частотах имеют вид:
 , (1)
, (1)
 , (2)
, (2)
где ,
- значения первой и второй несущих частот;
,
- значения измеренных кодовых ПД соответственно на первой и второй частотах.
Поправка на вращение Земли вокруг своей оси за время распространения сигнала от КА до пункта наблюдения (в метрах) вычисляется по формуле:
![]() , (3)
, (3)
где - угловая скорость вращения Земли вокруг своей оси;
- большая полуось общеземного эллипсоида;
- расстояние до КА (в метрах);
- скорость света, равная 299792498 м/с;
- широта пункта наблюдения;
,
- соответственно азимут и зенитное расстояние КА.
4.2 Определение первых разностей фаз
Исходным соотношением служит формула:
![]() , (4)
, (4)
где - номер спутника;
- номер момента времени измерения
;
1, 2 - номера исходного и определяемого пунктов;
![]() - величина ПРФ;
- величина ПРФ;
![]() ,
, ![]() - измеренные значения фаз.
- измеренные значения фаз.
С использованием ряда допущений, практически не влияющих на точность решения, величину ![]() * представляют в виде
* представляют в виде
_______________
* Текст документа соответствует оригиналу. - .
![]() , (5)
, (5)
![]() , (6)
, (6)
где - несущая частота;
и
- поправка к шкале времени и интервал времени прохождения сигналов от
-го спутника до
-го пункта в момент
(
1, 2);
- целочисленный параметр ПРФ при
1;
- случайная погрешность измерения первой разности фаз.
Формула (5) нелинейна относительно поправки в том смысле, что параметр
должен быть получен на истинный момент приема сигнала (
![]() ).
).
Для существенного сокращения числа искомых параметров и повышения точности относительных определений поправки к временным шкалам пунктов представляют в виде:
![]() , (7)
, (7)
где - поправка к временной шкале
-го пункта в момент первого измерения;
- коэффициент линейного ухода временной шкалы
-го пункта;
- номер пункта (
1, 2);
- промежуток времени между текущим и начальным моментом измерений.
4.3 Определение вторых разностей фаз
Исходным соотношением служит формула
![]() , (8)
, (8)
где ![]() - вторая разность фаз на момент
- вторая разность фаз на момент .
С учетом полученных первых разностей фаз вторые разности фаз определяют по формуле
 (9)*
(9)*
_______________
* Формула соответствует оригиналу. - .
![]() , (10)
, (10)
где - целочисленный параметр ВРФ;
и
- мгновенные дальности
-го и
-го спутников от
-го пункта в момент
,
и
- скорость изменения дальности
-го и
-го спутников от
-го пункта в момент
,
- частота несущей;
- скорость света;
- случайная погрешность вторых разностей фаз в момент
.
Линеаризация позволяет получить уравнение погрешностей ВРФ, в котором неизвестными являются следующие параметры:
- поправки к предварительным координатам двух пунктов (шесть параметров);
- временные параметры двух пунктов (четыре неизвестных);
- целочисленные параметры, число которых на единицу меньше числа наблюденных спутников.
Систему уравнений погрешностей ВРФ на моменты , ...,
описывают матрицей коэффициентов и вектором свободных членов.
Матрицу коэффициентов представляют в виде
 , (11)
, (11)
где - число моментов измерений ВРФ;
, ...,
- блоки идентичной структуры, зависящие от момента измерений и числа наблюдаемых спутников.
Например, для четырех спутников каждый из блоков , ...,
определяется по формуле
 ,
, 1, …,
, (12)
где и
- коэффициенты при поправках к начальным моментам измерений первого и второго пунктов;
и
- коэффициенты при скоростях ухода шкал времени первого и второго пунктов;
,
,
и
,
,
- коэффициенты при поправках к предварительным координатам первого и второго пунктов.
Коэффициенты и
вычисляются по формулам
![]() ,
,
(13)
![]() .
.
Коэффициенты и
вычисляются по формулам:
![]() ,
,
(14)
![]() .
.
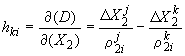
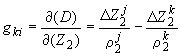
Коэффициенты ,
,
вычисляются по формулам:
 ,
,
 , (15)
, (15)
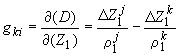 .
.
Коэффициенты ,
,
вычисляются по формулам:
 ,
,
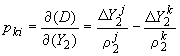 , (16)
, (16)
 .
.
Коэффициенты при целочисленных параметрах ВРФ образуют единичную матрицу.
Вектор свободных членов системы уравнений погрешностей ВРФ определяется как вектор, элементы которого представляют собой разности ВРФ, вычисляемых по предварительным значениям определяемых параметров, и измеренных значений ВРФ на моменты , ...,
.
Полученную систему уравнений поправок решают по МНК с учетом корреляции ВРФ.
4.4 Учет корреляции вторых разностей фаз
Корреляцию ВРФ учитывают путем использования в решении ковариационной матрицы ВРФ . Данная матрица имеет блочно-диагональную структуру. Диагональные блоки являются квадратными матрицами. Их число равно числу
моментов измерений. Размер блока выражается числом, на единицу меньшим числа
наблюдаемых спутников. Например, при
4 каждый из указанных блоков имеет вид
 ,
, 1, …,
. (17)
4.5 Получение целочисленных параметров вторых разностей фаз
Определяемые параметры ВРФ получают из решения системы нормальных уравнений.
Матрицу системы нормальных уравнений формируют в соответствии с формулой
![]() , (18)
, (18)
где - матрица, транспонированная по отношению к матрице
;
- весовая матрица, обратная по отношению к ковариационной матрице
.
Вектор свободных членов системы нормальных уравнений формируют по формуле:
![]() , (19)
, (19)
где - вектор свободных членов уравнений погрешностей ВРФ.
Из решения системы нормальных уравнений получают:
- временные параметры;
- поправки к координатам исходного и определяемого пунктов;
- целочисленные параметры ВРФ.
Вследствие погрешностей измерений, плохих условий наблюдений навигационных спутников (многолучевость, искусственные и естественные препятствия наблюдений и т.д.) фактические значения целочисленных параметров, как правило, не являются целыми числами. Поэтому полученные значения этих параметров должны быть округлены до целого в ближайшую сторону. С этими новыми значениями необходимо перевычислить вектор свободных членов уравнений погрешностей и получить новое решение с учетом поправок к шкалам времени пунктов и скоростям их изменения, а также поправок к координатам пунктов.
Электронный текст документа
и сверен по:
, 2010
{kind=link}