ГОСТ Р ИСО 11783-9-2021
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Тракторы и машины для сельского и лесного хозяйства
ПОСЛЕДОВАТЕЛЬНАЯ СЕТЬ УПРАВЛЕНИЯ И ПЕРЕДАЧИ ДАННЫХ
Часть 9
Электронный блок управления трактора
Tractors and machinery for agriculture and forestry. Serial control and communications data network. Part 9. Tractor ECU
ОКС 65.060.01
Дата введения 2022-01-01
Предисловие
1 ПОДГОТОВЛЕН Российской ассоциацией производителей специализированной техники и оборудования (Ассоциация "Росспецмаш") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 284 "Тракторы и машины сельскохозяйственные"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 октября 2021 г. N 1247-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 11783-9:2012* "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 9. Электронный блок управления трактора" (ISO 11783-9:2012 "Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 9: Tractor ECU", IDT).
Международный стандарт разработан Техническим комитетом ISO/TC 23 "Тракторы и машины для сельского и лесного хозяйства", Подкомитетом SC 19 "Сельскохозяйственная электроника" Международной организации по стандартизации (ISO).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Части с 1 по 14 серии стандартов ИСО 11783 устанавливают систему коммуникаций сельскохозяйственного оборудования, основанную на ИСО 11898-1 [1]. Документы SAE J 1939 [2], на части которых основаны стандарты серии ИСО 11783, были разработаны для совместного использования на грузовых автомобилях и автобусах, а также для применения в строительстве и сельском хозяйстве. Были разработаны общие документы, позволяющие использовать после минимальных изменений в сельскохозяйственном и лесохозяйственном оборудовании электронные блоки, соответствующие техническим условиям SAE J 1939 для грузовых автомобилей и автобусов. Общая информация по всем частям серии стандартов ИСО 11783 приведена в ИСО 11783-1.
Цель стандартов серии ИСО 11783 состоит в предоставлении открытой взаимосвязанной системы для бортовых электронных систем. Стандарт предназначен для обеспечения связи электронных блоков управления (ECU) со всеми другими блоками в целях создания стандартной системы.
Международная организация по стандартизации (ISO) привлекает внимание к тому факту, что заявление о соответствии настоящему стандарту может означать использование патента, относящегося к протоколу локальной сети контроллеров (CAN), ссылки на который приводятся по всему стандарту.
ИСО не занимает какую-либо позицию в отношении существования, действительности и объема этого патента.
Держатель данного патента предоставил ИСО гарантии, что он желает провести переговоры о предоставлении лицензий на разумных и недискриминационных условиях претендентам во всем мире. Заявление держателя этих патентных прав в этом отношении зарегистрировано в ИСО. Информация может быть получена по следующему адресу:
Robert Bosch GmbH
Wernerstrasse 51
Postfach 30 02 20
D-70442 Stuttgart-Feuerbach
Germany
Следует обратить внимание на возможность того, что некоторые элементы настоящего стандарта могут быть объектом патентных прав кроме вышеуказанных. ИСО не несет ответственность за определение каких-либо или всех таких патентных прав.
1 Область применения
Стандарты серии ИСО 11783 устанавливают технические требования к последовательным сетям передачи данных, относящимся к управлению и передаче сообщений в сельскохозяйственных и лесных тракторах, и в навесных, полунавесных, буксируемых или самодвижущихся орудиях. Цель настоящего стандарта заключается в стандартизации метода и формата передачи данных между датчиками, приводами, элементами управления, блоками для хранения или отображения информации, установленными на тракторе или орудиях, или являющихся их частью. В настоящем стандарте описан электронный блок управления трактора (TECU), управляющей функции (CF), которая предоставляет шлюз между сетью трактора и шинами орудий, наряду с выполнением других функций.
Требования настоящего стандарта указываются как версия 2 TECU и рабочих наборов.
Примечание - ECU трактора также является управляющей функцией (CF), которая представляет трактор или аналогичные функции в самоходных машинах для таких функций, как виртуальный терминал на шине орудия.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
ISO 11783-1, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 1: General standard for mobile data communication (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 1. Общий стандарт на мобильную передачу данных)
ISO 11783-2, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 2: Physical layer (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 2. Физический уровень)
ISO 11783-4, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 4: Network layer (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 4. Сетевой уровень)
ISO 11783-5, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 5: Network management (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 5. Управление сетью)
ISO 11783-6, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 6: Virtual terminal (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 6. Виртуальный терминал)
ISO 11783-7, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 7: Implement messages application layer (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 7. Прикладной уровень сообщений для управления орудием)
ISO 11783-8, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 8: Power train messages (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 8. Сообщения для управления трансмиссией)
ISO 11783-10, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 10: Task controller and management information system data interchange (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 10. Обмен данными между контроллером задач и информационной системой управления)
ISO 11786, Agricultural tractors and machinery - Tractor-mounted sensor interface - Specifications (Сельскохозяйственные тракторы и машины. Интерфейс сенсоров, установленных на тракторе. Спецификации)
ISO 16154, Tractors and machinery for agriculture and forestry - Installation of lighting, light signaling and marking devices for travel on public roadways (Тракторы и машины для сельского и лесного хозяйства. Монтаж устройства освещения, световой сигнализации и маркировочных устройств для движения по дорогам общего пользования)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 11783-1.
4 Описание и спецификации
4.1 Порты
4.1.1 Общие положения
В системе с сетью по ИСО 11783 ECU трактора выполняет функцию шлюза (см. ИСО 11783-4) между шинами трактора и орудия.
ECU трактора должен иметь как минимум один порт для подключения к шине орудия. Однако, когда на тракторе имеется как шина орудия, так и шина трактора, ECU трактора должен иметь два порта - порт шины орудия и порт шины трактора.
4.1.2 Привязка портов
Для привязки коммуникационной сети к какому-либо порту ECU трактора следует использовать:
- порт 1 как порт шины орудия;
- порт 2 как порт шины трактора, при ее наличии.
См. ИСО 11783-4:2011, рисунок 1.
4.1.3 Физический уровень порта
Порт шины орудия ECU трактора должен быть спроектирован таким образом, чтобы он мог подключаться к физическому уровню, описанному в ИСО 11783-2. Порт шины трактора может подключаться к другому физическому уровню, но рекомендуется физический уровень ИСО 11783.
Примечание - В настоящем стандарте предполагается, что оба порта спроектированы в соответствии с физическим уровнем по ИСО 11783.
4.2 Функции и переупаковка параметров
4.2.1 Общие положения
В качестве CF, представляющей трактор и его сообщения на шине орудия, ECU трактора отвечает за связь между трактором и другими CF на данной шине; с этой целью система должна воспринимать ECU трактора так же, как и любую другую CF на шине орудия. Особенно важно, чтобы доступ трактора к виртуальному терминалу (VT) (см. ИСО 11783-6) был идентичен доступу любого другого орудия. ECU трактора также отвечает, в части своих функций межсетевого соединения, за передачу сообщений между сетями орудий, обработку данных и сообщений шины трактора с соответствующими параметрами, чтобы трактор мог работать с сообщением данных процесса в порядке, соответствующем классификации. ECU трактора выступает в качестве шлюза и/или маршрутизатора в зависимости от типа (типов) сетей, к которым он подключен.
4.2.2 Сообщения от шины трактора к шине орудия
ECU трактора должен собирать с шины трактора или непосредственно c подключенных датчиков, таких как датчики, указанные в ИСО 11786, всю информацию, содержащуюся в сообщениях, определенных конкретной классификацией. Затем он должен перенаправить эти данные в сообщениях, указанных для своего класса, на шину орудия, используя свой собственный конкретный адрес источника (SA), одновременно устанавливая конкретные назначения для конкретных сообщений. Когда ECU трактора размещает запрошенную информацию на шине орудия, он должен использовать глобальный пункт назначения для уменьшения нагрузки на шину в случаях, когда существует несколько запросов на одну и ту же информацию (а также для уменьшения требований к базе данных фильтров в ECU трактора).
Чтобы минимизировать использование полосы пропускания на шине орудия, данные, которые отправляются в PG посредством ECU трактора, которые представляют интерес для контроллера задач, не должны дублироваться в сообщении данных процесса. ИСО 11783-10 позволяет контроллеру задач получать данные через PG, и данный метод должен использоваться для любых данных, которые уже отправлены в стандартном PG ECU трактора.
4.2.3 Сообщения от шины орудия к шине трактора
ECU трактора должен получать от шины орудия все сообщения, предназначенные для управления функциями трактора, включая данные процесса, в зависимости от классификации.
ECU трактора должен проанализировать эти сообщения в соответствии с конструкцией трактора.
Затем он должен перенаправить их, с глобальным или конкретными адресами назначениями, на шину трактора, используя свой собственный конкретный SA.
4.2.4 Сообщения от ECU трактора к шине орудия
ECU трактора может создавать сообщения с конкретным адресом назначения на шине орудия, представляющие трактор, как и любую другую CF на шине орудия.
Пример - Размещение экрана с параметрами трактора на виртуальном терминале.
4.3 Однотипность группирования
Тракторы должны иметь такой же доступ к службам шины орудия (например, VT, контроллеры задач, шлюз управляющего компьютера), как и у CF орудия. Во избежание необходимости наличия двух разных сетевых драйверов для этих служб, одного для шины орудия и другого для шины трактора, группирование в качестве элементов набора CF трактора на шине трактора должно быть организовано ECU трактора аналогично группированию управляющих функций управляющей функцией орудия или мастера рабочего набора.
4.4 Классификация и минимальные поддерживаемые наборы сообщений
4.4.1 Общие положения
Для идентификации трактора в сети орудия по имени ECU трактора см. ИСО 11783-1; поля имени - см. ИСО 11783-5.
4.4.2 Классификация интерфейсов "трактор-орудие"
4.4.2.1 Общие положения
Класс трактора определяет минимальный набор сообщений, которые ECU трактора выдает на шину орудия для управляющих функций орудия. Существует три основных класса интерфейса "трактор-орудие" для трактора с шиной ИСО 11783, которые определены в последующих пунктах как классы 1,2 и 3. Для использования указанной классификации по номерам ECU трактора должен подтверждать все сообщения в каждом из трех классов интерфейса, указанных в 4.4.2.2-4.4.2.4. Трактор может поддерживать классификацию, когда в тракторе физически отсутствует необходимая функция (т.е. если не установлено заднее сцепное устройство или вал отбора мощности). В данном случае ECU трактора должен ответить с параметрами сообщения, установленными на "недоступно" для тех параметров, которые связаны с отсутствующими функциями. Если данные или средства управления, необходимые для создания сообщений, отсутствуют при установке функции, класс трактора должен определяться исходя из классификации предоставленных сообщений, а не по установленным функциям.
Кроме того, буквенные дополнения, адресованные группировкам сообщений, связанных с функциями, могут использоваться в сочетании с любой из пронумерованных классификаций. Они должны быть добавлены следующим образом:
- трактор класса xN - навигационные сообщения;
- трактор класса xF - сообщения установленного спереди орудия;
- трактор класса xG - сообщения рулевой системы (TECU версии 2 и позднее);
- трактор класса xP - сообщения ходовой части (TECU версии 2 и позднее);
- трактор класса xM - сообщения начала движения (TECU версии 2 и позднее),
где "x" - номер класса, а "N", "F", "G", "Р", и "М" отображают наборы вышеуказанных сообщений (смотри пункты с 4.4.2.5 по 4.4.2.9). Также могут быть использованы дополнения из нескольких букв. Например, класс 3GP обозначает трактор класса 3 с поддержкой сообщений рулевой системы и ходовой части.
Изготовитель трактора может предоставлять дополнительные сообщения без предоставления полного набора сообщений ECU трактора более высокого класса.
Следующие абзацы настоящего подпункта применимы к TECU версии 2 и позднее.
ECU трактора всех классов должны поддерживать сообщение о соответствии сертификации ISOBUS, особенно соответствие сертификации параметров класса TECU.
Как указано в ИСО 11783-7, ECU трактора должен передавать ответное сообщение оборудования трактора при включении питания и по запросу. CF подключенного орудия также могут использовать требуемое сообщение об оборудовании трактора для запроса ECU трактора и определения его классификации и предоставляемых средств.
Информация в ответном сообщении оборудования трактора должна относиться к установленному оборудованию, а не к оборудованию, запрашиваемому CF орудия.
Если CF орудия требует оборудования трактора, которое не поддерживается ECU трактора, CF оборудования может проинформировать оператора об отсутствующем оборудовании.
CF орудия может отправлять требуемое сообщение об оборудовании трактора в ECU трактора, чтобы разрешить передачу сообщений, которые предоставляют необходимое оборудование. Оборудование не требуется, если его соответствующие биты установлены в 0 в сообщении CF орудия о необходимом оборудовании трактора. ECU трактора может затем остановить передачу данного сообщения орудия, чтобы уменьшить полосу пропускания. Если ECU трактора получает требуемые сообщения об оборудовании трактора от более чем одного орудия, ECU трактора передает только одно ответное сообщение о тракторе с установленными битами для всего необходимого оборудования.
Функция ECU трактора может быть встроена в дисплей, который обеспечивает функцию VT, для передачи основных внутренних показаний трактора по ИСО 11786 на шину орудия, как указано в 4.4.2.2. Если к шине орудия подключено несколько ECU трактора, применяются следующие правила.
a) ECU трактора с идентификатором экземпляра функции 0 является основным ECU трактора, в то время как ECU трактора с идентификатором экземпляра функции 1 является дополнительным ECU трактора.
b) ECU трактора с идентификатором экземпляра функции 0 должен быть ответственным за управление питанием, контролем освещения и отвечать на языковые команды.
c) ECU трактора с высшим идентификатором экземпляра функции не должен предоставлять никаких сообщений, предоставляемых ECU трактора с низшим идентификатором экземпляра функции.
d) ECU трактора с идентификатором экземпляра функции, не равным нолю, должен также запрашивать ответные сообщения оборудования трактора от ECU трактора с низшим идентификатором экземпляра функции. Такой ECU трактора должен устанавливать только те биты оборудования, которые недоступны в других ECU трактора. Это дает возможность, например, когда сообщения скорости относительно земли и расстояния не доступны в TECU с обозначением ноль, передавать эти сообщения дисплеем со встроенным ECU трактора, подключенным к приемнику GPS.
CF орудия должна иметь возможность получать и обрабатывать множественные сообщения оборудования трактора в случае, если к сети орудия подключено несколько ECU трактора.
4.4.2.2 Интерфейс "трактор-орудие" - класс 1
Трактор с интерфейсом "трактор-орудие" класса 1 имеет простой ECU, поддерживающий сеть, который предоставляет основные внутренние измерения трактора, указанные в ИСО 11786. Путем присоединения существующих датчиков к простому ECU, подключенному к сети, использование интерфейса данного класса позволяет производителям тракторов соответствовать ИСО. Однако его не следует использовать для новых конструкций тракторов.
Минимальный набор информации должен включать управление питанием, поддержку языка по умолчанию и ответное сообщение тракторного оборудования. Это измененное требование для TECU версии 2.
Трактор с этим интерфейсом "трактор-орудие" поддерживает следующие параметры, указанные в ИСО 11783-7, за исключением частоты вращения двигателя, указанной в ИСО 11783-8:
a) управление питанием:
1) положение ключа зажигания;
2) максимальное время питания трактора;
3) запросы на поддержание питания;
b) информация о скорости:
1) скорость машины по оборотам колес;
2) скорость машины по геолокационным данным;
3) обороты двигателя (частота передачи сообщения должна быть 100 мс);
c) информация о сцепном устройстве:
1) положение заднего сцепного устройства;
2) индикация использования заднего сцепного устройства;
d) информация о ВОМ (вале отбора мощности):
1) скорость вращения заднего ВОМ;
2) подключение заднего ВОМ;
e) информация о языке: язык, установленный по умолчанию, должен храниться в ECU трактора для обеспечения инициализации VT. Описание обновления языка, хранящегося в ECU трактора, см. в ИСО 11783-7;
f) ответ оборудования трактора (TECU версии 2 и позднее).
4.4.2.3 Интерфейс "трактор-орудие" - класс 2
Интерфейс "трактор-орудие" класса 2 предоставляет полный набор измеряемых показателей трактора. Основные расширения класса 2:
- определенные по оборотам колес и геолокации расстояния и направления;
- информация о задних тягах;
- сообщения освещения и
- расчетный или измеренный расход через дополнительные клапаны.
Это позволяет более точно контролировать орудие и стратегию безопасности.
Трактор с таким интерфейсом "трактор-орудие" поддерживает сообщения класса 1 и следующие параметры, описанные в ИСО 11783-7:
a) время/дата;
b) скорость и расстояние:
1) определенное по геолокации пройденное расстояние;
2) определенное по геолокации направление движения;
3) определенное по оборотам колес пройденное расстояние;
4) определенное по оборотам колес направление движения;
c) дополнительный параметр сцепки: задний тяговый брус;
d) набор сообщений освещения трактора и орудия, установленного ИСО 16154 для соответствующего региона (TECU версии 2 и позднее);
e) расчетный или измеренный расход через дополнительные клапаны.
4.4.2.4 Интерфейс "трактор-орудие" - класс 3
К классу 3 относятся ECU трактора, которые принимают команды от шины орудия. Должны обрабатываться основные команды для заднего сцепного устройства, ВОМ и дополнительных клапанов, позволяя орудию контролировать требуемый источник питания и необходимое положение сцепного устройства. Тракторы могут отрицательно подтверждать эти команды.
Трактор с интерфейсом "трактор-орудие" поддерживает сообщения класса 2 и следующие команды, описанные в ИСО 11783-7:
a) информация о сцепном устройстве:
1) статус предельных положений заднего сцепного устройства (TECU версии 2 и позднее);
2) код причины отключения заднего сцепного устройства (TECU версии 2 и позднее);
b) команды сцепному устройству: команда положения заднего сцепного устройства;
c) информация о ВОМ (вал отбора мощности);
1) статус подключения заднего ВОМ (TECU версии 2 и позднее);
2) статус предельных скоростей вращения ВОМ (TECU версии 2 и позднее);
3) код причины отключения заднего ВОМ (TECU версии 2 и позднее);
d) команды заднего ВОМ:
1) команда на установку скорости вращения заднего ВОМ;
2) команда на подключение заднего ВОМ;
e) информация об измеренном или расчетном расходе дополнительных клапанов:
1) статус предельных расходов через дополнительные клапаны (TECU версии 2 и позднее);
2) код причины отключения дополнительных клапанов (TECU версии 2 и позднее);
f) команды дополнительных клапанов.
4.4.2.5 Поддержка навигационных сообщений
Набор навигационных сообщений, описанный в ИСО 11783-7, предоставляется установкой на трактор приемника системы GPS (глобальной системы позиционирования) или DGPS (дифференциальной глобальной системы позиционирования). Специальная классификация "N" добавляется к номеру класса, если трактор предоставляет навигационные сообщения на шину орудия.
Например, интерфейс "трактор-орудие" класса 3 (см. 4.4.2.4), который также поддерживает навигационные сообщения, должен быть классифицирован как класс 3N, и поддерживать сообщения навигационной системы позиционирования (см. ИСО 11783-7).
4.4.2.6 Поддержка дополнительного или установленного спереди орудия
Данный набор сообщений, описанный в ИСО 11783-7, обеспечивается установкой на тракторе дополнительного или установленного спереди сцепного устройства и ВОМ. Специальная классификация "F" добавляется к номеру класса, если трактор предоставляет на шину орудия информацию о дополнительном или установленном спереди орудии.
Например, интерфейс "трактор-орудие" класса 2 (см. 4.4.2.3), который также поддерживает сообщения установленного спереди орудия, должен быть классифицирован как класс 2F. Команды переднего орудия поддерживаются только интерфейсом "трактор-орудие" класса 3. Для соответствия указанной классификации должны поддерживаться следующие параметры установленного спереди орудия (см. ИСО 11783-7):
a) информация о сцепном устройстве (TECU класса 1):
1) положение переднего сцепного устройства;
2) индикация использования переднего сцепного устройства;
b) информация о ВОМ (TECU класса 1):
1) скорость вращения переднего ВОМ;
2) подключение переднего ВОМ;
c) дополнительный параметр сцепки (TECU класса 2): передние тяги;
d) информация о сцепном устройстве (TECU класса 3):
1) статус предельных положений переднего сцепного устройства (TECU версии 2 и позднее);
2) код причины отключения переднего сцепного устройства (TECU версии 2 и позднее);
e) команды сцепному устройству: команда положения переднего сцепного устройства;
f) информация о ВОМ (TECU класса 3):
1) статус подключения переднего ВОМ (TECU версии 2 и позднее);
2) статус предельных скоростей вращения ВОМ (TECU версии 2 и позднее);
3) код причины отключения переднего ВОМ (TECU версии 2 и позднее);
g) команды ВОМ (TECU класса 3):
1) команда на установку скорости вращения переднего ВОМ;
2) команда на подключение переднего ВОМ.
4.4.2.7 Поддержка системы автоматического управления - TECU версии 2 и позднее
Данный набор сообщений, описанный в ИСО 11783-7, обеспечивается установкой на трактор системы автоматического управления (рулевой). Специальная классификация "G" добавляется к номеру класса, если трактор предоставляет автоматическое рулевое управление. В отличии от классификации "F", классификация "G" не зависит от базового класса (1, 2 или 3) трактора. Трактор, имеющий "G" в своей классификации, должен обеспечивать все параметры, включающие и статус и контроль рулевой системы.
Например, интерфейс "трактор-орудие" класса 2 (см. 4.4.2.3), который также поддерживает сообщения рулевой системы, должен быть классифицирован как класс 2G и должен поддерживать внешнее управление рулевой системой. Для классификации рулевой системы должны использоваться следующие параметры (см. ИСО 11783-7):
- команда на движение по дуге;
- расчетный радиус дуги;
- статус команды на движение по дуге;
- запрос на изменение статуса команды;
- статус положения рулевого управления;
- готовность рулевой системы;
- блокировка механической системы.
4.4.2.8 Ходовая часть - TECU версии 2 и позднее
Данный набор сообщений, описанный в ИСО 11783-7, обеспечивается трактором, если он может принимать от контроллера орудия команды о скорости или стратегии движения. Специальная классификация "Р" добавляется к номеру класса, если трактор предоставляет данный функционал. Классификация "Р" указывает, что трактор может принимать команды независимо от базового класса (1, 2 или 3) трактора. Трактор, имеющий "Р" в своей классификации, должен обеспечивать все параметры, включающие и статус и контроль скорости движения. Возможность контроля стратегии движения или полной остановки трактора (т.е. скорости 0,0) является опциональной и может быть определена орудием посредством ответного сообщения оборудования трактора (см. ИСО 11783-7).
Например, интерфейс "трактор-орудие" класса 2 (см. 4.4.2.3), который также поддерживает управление скоростью, должен быть классифицирован как класс 2Р. Для классификации ходовой части должны быть использованы следующие параметры (см. ИСО 11783-7):
- выбранная скорость машины;
- выбранное направление движения машины;
- статус предельной выбранной скорости машины (TECU версии 2 и позднее);
- код причины отключения скорости машины (TECU версии 2 и позднее);
- источник выбора скорости машины;
- команда выбора скорости машины;
- команда выбор направления движения машины.
При использовании для управления установленной скорости машина должна быть источником выбора скорости, которую трактор использует для управления скоростью транспортного средства. Обычно это расчетная скорость, но может быть использован другой доступный вариант. Трактор несет ответственность за обеспечение плавного перехода при изменении источника скорости во время управления.
4.4.2.9 Начало движения - TECU версии 2 и позднее
Набор сообщений, описанный в ИСО 11783-7, должен обеспечиваться трактором если он способен обрабатывать команды на начало движения транспортного средства (вперед или назад). Специальная классификация "М" добавляется к номеру класса, если трактор предоставляет данный функционал.
Например, интерфейс "трактор-орудие" класса 3 (см. 4.4.2.4), который также поддерживает команды на начало движения, должен быть классифицирован как класс 3М.
4.4.3 Управляемый орудием трактор - Опциональное управление
Трактор может обеспечивать дополнительные режимы управления для увеличения или улучшения точности скорости, крутящего момента, расхода, давления, усилия или других контролируемых параметров, используя соответствующие команды, описанные в ИСО 11783-7. Доступность данных режимов управления различается для разных конструкций тракторов и может быть определена посредством ответных сообщений оборудования трактора (см. ИСО 11783-7).
Трактор должен определять ограничения каждого режима управления и подтверждать только допустимые команды.
4.5 Контроль освещения
ECU трактора версии 2 и позднее с обозначением 0 отвечает за контроль освещения на орудии. Этот контроль осуществляется командами освещения и сообщениями данных освещения, описанными в ИСО 11783-7 и контролем ECU_PWR и PWR (см. 4.6).
ECU трактора должен отслеживать команды освещения (исходящие как от оператора, так и от систем транспортного средства) и положение ключа зажигания транспортного средства, и должен управлять каждым световым прибором с учетом правил, установленных в регионе, для работы в котором разработан трактор. Команды освещения могут отслеживаться по сообщениям данных освещения в шине трактора или посылаемыми оператором в ECU трактора командами. ECU трактора должен проверить поступление питания на шину орудия и направить соответствующее сообщение освещения.
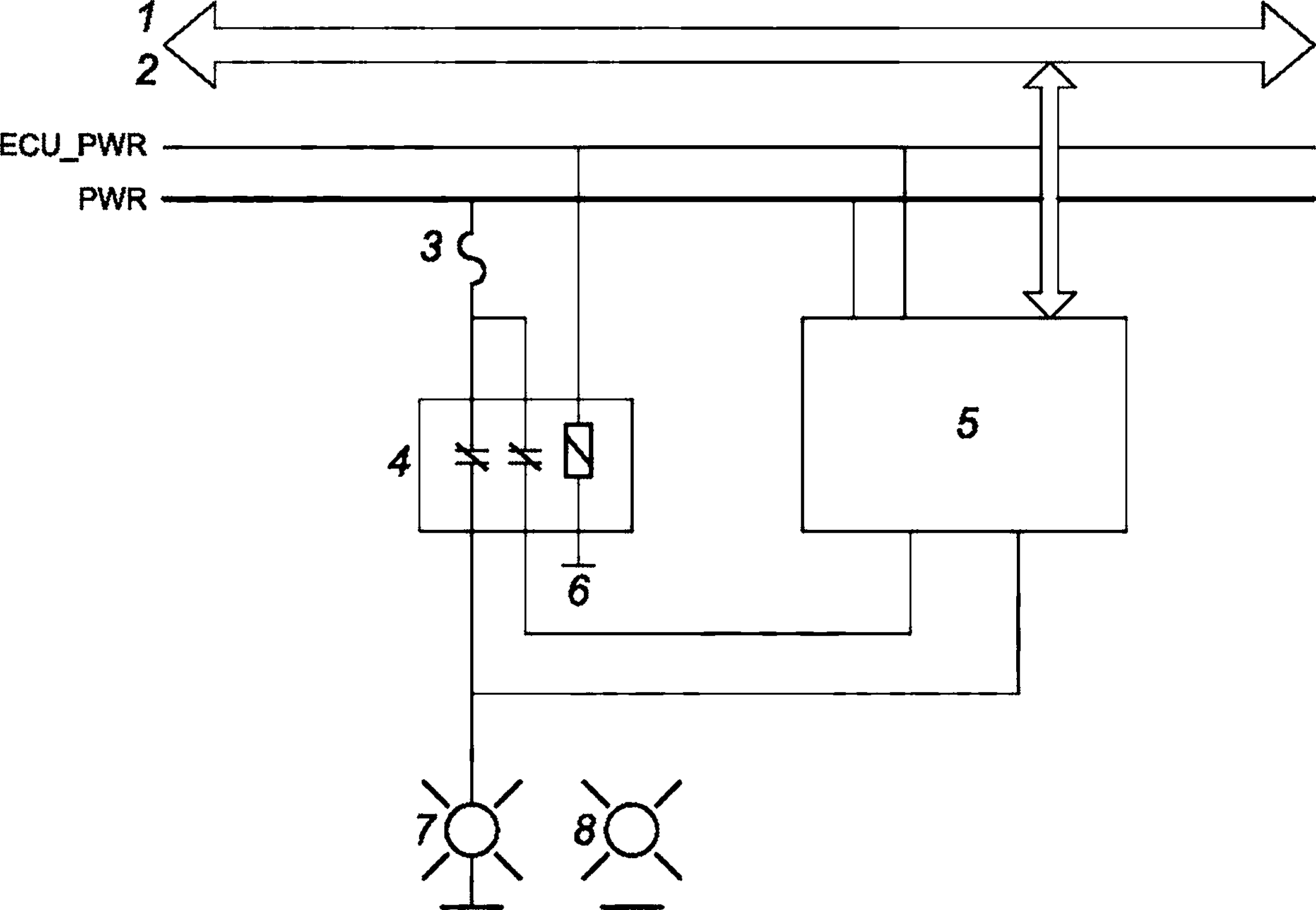
Если сбои в шине орудия или трактора не позволяют надежно установить связь с шиной орудия, то ECU трактора должен управлять соединением PWR (питание), одновременно отключая соединение ECU_PWR. ECU трактора должен включать и выключать соединение PWR с частотой вспышек предупреждающих огней. Подключенное оборудование с синхронизированным освещением должно использовать это устройство для управления предупреждающими огнями.
На рисунке 1 приведена блок-схема, показывающая средства управления предупреждающими огнями орудия в случае сбоя, произошедшего в шине орудия или трактора. Сообщения для управления освещением трактора и орудия смотри в ИСО 11783-7.
 |
1 - CAN-шина; 2 - витой четырехжильный кабель; 3 - предохранитель; 4 - двухполярное реле; 5 - ECU освещения орудия; 6 - ECU_GND; 7 - левый предупреждающий огонь; 8 - правый предупреждающий огонь; 9 - заземление
Рисунок 1 - Контроль предупреждающих огней орудия
4.6 Контроль ECU_PWR и PWR
4.6.1 ECU_PWR
ECU трактора версии 2 и позднее с обозначением ноль отвечает за контроль и распределение ECU_PWR к орудиям, подключенных к шине орудий через присоединительные разъемы (см. ИСО 11783-2), за отправление сообщений, отображающих статус ECU_PWR, и за получение и действия в соответствии с управляющими сообщениями для ECU_PWR, если ECU_PWR расположена в другом месте трактора. ECU трактора должен передавать сообщение c объявлением своего адреса после включения ECU_PWR.
Такие ECU как VT, установленные на тракторе и постоянно подключенные к шине орудия, должны быть подключены к ECU_PWR. Изготовитель трактора или установщик должен определить, должны ли получать питание через ECU_PWR ECU, установленные на тракторе и подключенные к шине орудия посредством разъемов расширения шины.
Ток оконечных схем TBC_PWR для шины орудия должен поступать от ECU_PWR или напрямую от ECU трактора для обеспечения работоспособности оконечных схем для ECU, использующих шину орудия для контроля за ECU_PWR. Для TECU версии 2 и позднее, в разъем TBC_PWR должна быть включена защита от перегрузки для обеспечения защиты от коротких замыканий между TBC_PWR и TBC_RTN или ECU_GND.
Минимальный допустимый ток из шины орудия 12 В ECU_PWR должен быть 15 А.
Блок-схему средств, которыми ECU трактора может контролировать ECU_PWR см. на рисунке 2.
4.6.2 PWR
ECU трактора также отвечает за контроль распределения питания к орудиям, подключенным к шине орудия через разъемы на тракторе (см. ИСО 11783-2), за отправку сообщений, отображающих статус питания, и за получение и выполнение сообщений управления питанием, независимо от фактического расположения питания на тракторе.
Минимальный допустимый ток из шины орудия 12 В PWR должен быть 50 А. Это измененное требования для ECU версии 2 и позднее.
Блок-схему средств, которыми ECU трактора может контролировать PWR, см. на рисунке 2.
4.6.3 ECU_PWR и PWR минимальная суммарная сила тока
Минимальная суммарная сила тока шин орудий ECU_PWR и PWR должна составлять постоянные 55 A. В версия TECU 2 и позднее требования изменены.
4.6.4 Выключение системы - TECU версии 2 и позднее
4.6.4.1 Общие положения
Выключение системы - это период времени, когда положение ключа зажигания указывает на то, что ключ выключен, а ECU_PWR остается включенным не менее 2 с. Допускается одновременное включение PWR одновременно с ECU_PWR (см. ИСО 11783-7 для определения сообщений и параметров). На рисунке 3 показаны сообщения, отправленные без запроса на поддержание питания.
Для управления выключением управляющая функция должна контролировать положение ключа зажигания и в результате изменения с "Включено" на "Выключено", в зависимости от своих эксплуатационных требований, выполнить действия по отключению питания, указанные в 4.6.1 и 4.6.2. Если управляющая функция должна сохранить настройки и/или данные перед выключением, она может запросить только сохранение ECU_PWR. Если управляющая функция должна перевести клапаны или приводы в отключенное состояние, она может запросить, чтобы PWR и ECU_PWR поддерживали работу клапанов или привода и продолжали передавать управляющие сообщения по сети.
Примечание - Запуск двигателя может вызывать непредусмотренные перебои питания (см. ИСО 11783-7 и ИСО 11783-5). Во время подобных перебоев питания передача параметра положения ключа зажигания и функционал поддержания питания для ECU_PWR и PWR могут быть заблокированы.
 |
1 - ключ зажигания; 2 - выключатель освещения; 3 - выключатель рабочего освещения; 4 - выключатель предупреждающих огней; 5 - выключатель габаритных огней; 6 - ECU трактора; 7 - шина орудия; 8 - присоединительный разъем шины орудия
Рисунок 2 - Контроль ECU_PWR и PWR
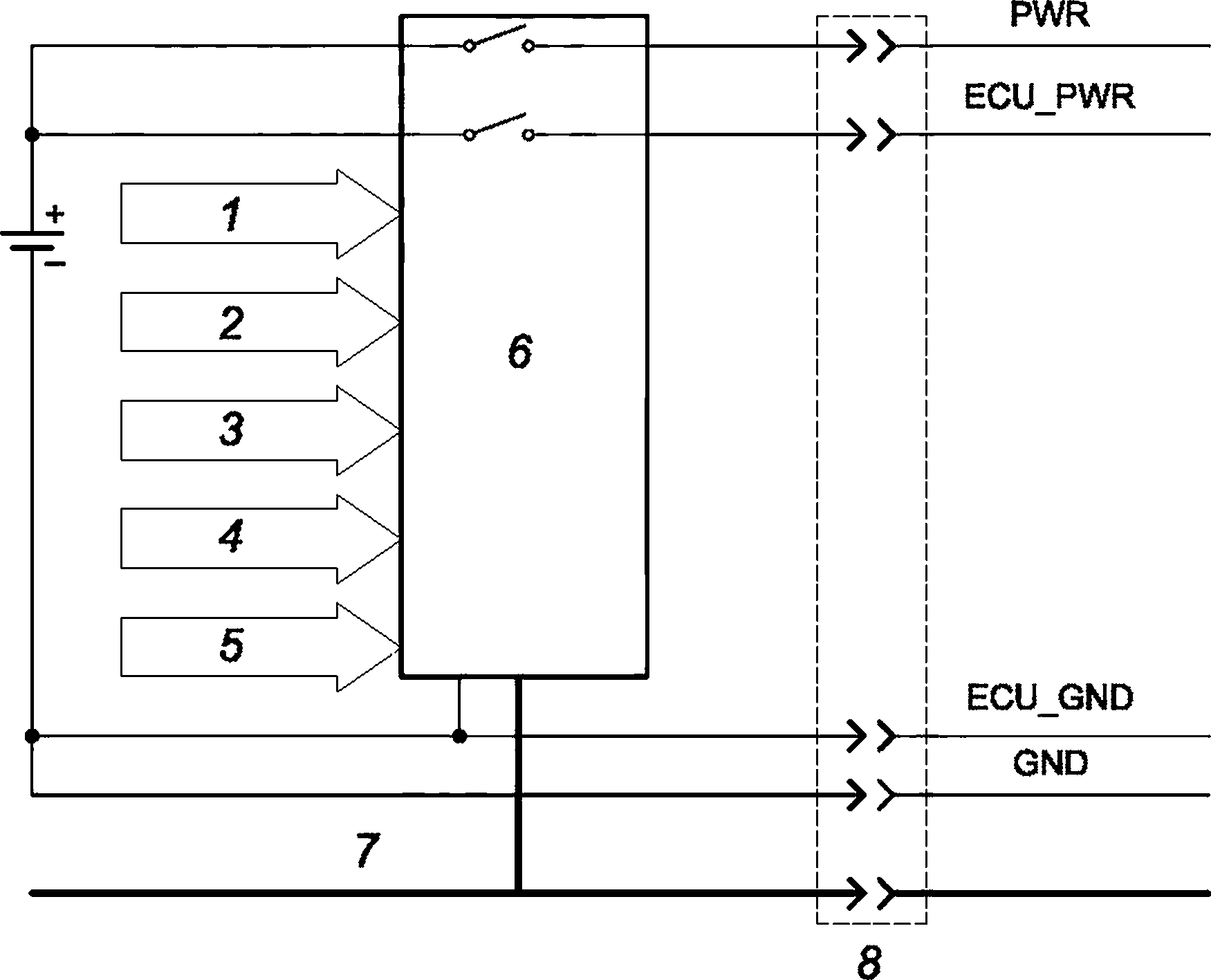 |
Рисунок 3 - Последовательность сообщений с отсутствием запросов на продолжение подачи питания
4.6.4.2 Сохранение данных управляющей функцией
Когда управляющая функция определяет изменение положения ключа зажигания с "Включено" на "Выключено" и ей требуется более 2 с для сохранения настроек или данных, она должна выполнить следующие действия:
a) CF должна послать сообщение "поддерживать питание" (см. ИСО 11783-7) с требованием поддержания питания ECU_PWR еще на 2 с для информирования ECU трактора о необходимости поддержания питания ECU_PWR;
b) CF должна продолжать посылать сообщение "поддерживать питание" с требованием поддержания питания ECU еще на 2 с не менее чем один раз в секунду, до тех пор пока процесс сохранения не будет выполнен;
c) Когда CF выполнила сохранение данных, она должна или прекратить посылать сообщение "поддерживать питание", или послать сообщение "поддерживать питание" без указания дополнительных требований для параметра ECU_PWR.
4.6.4.3 Отключение клапанов и/или приводов управляющей функцией
Когда управляющая функция определяет изменение положения ключа зажигания с "Включено" на "Выключено" и ей требуется более 2 с для перевода клапанов или приводов в отключенное состояние, она должна выполнить следующие действия:
a) CF должна послать сообщение "поддерживать питание" (см. ИСО 11783-7) с требованием поддержания питания ECU_PWR еще на 2 с и PWR еще на 2 с для информирования ECU трактора о необходимости поддержания питания ECU_PWR и PWR;
b) CF должна продолжать посылать сообщение "поддерживать питание" с требованием поддержания питания ECU еще на 2 с и PWR еще на 2 с не менее, чем один раз в секунду, до тех пор пока процесс отключения не будет выполнен;
c) когда CF выполнила отключение, она должна послать сообщение "поддерживать питание" без указания дополнительных требований для параметра питания приводов;
d) если CF содержит данные, которые необходимо сохранить, см. 4.6.4.2. В иных случаях управляющая функция должна либо прекратить посылать сообщение "поддерживать питание", или послать сообщение "поддерживать питание" без указания дополнительных требований для параметра ECU_PWR и PWR.
CF также должна отслеживать "Максимальное время включенного питания трактора", чтобы определить, достаточно ли у нее времени для выполнения отключения. Если отключение системы не может быть завершено в течение разрешенного времени включенного питания трактора, рекомендуется уведомить оператора при следующем включении питания, чтобы можно было предпринять соответствующие действия (например, проверить настройки, проверить клапаны и/или состояние привода или заменить батареи). См. рисунки 4, 5 и 6 для сообщений, отправленных с запросами на поддержание питания.
4.7 Работа в безопасном режиме
4.7.1 В случае отключения питания или связи с трактором орудие должно перейти в безопасный режим. Прерывание, восстановление после прерывания или колебания каким-либо образом источника питания орудия не должны приводить к опасной ситуации. Ни сбой в логике управления, ни сбой или повреждение цепи управления не должны приводить к опасности. Ниже приведены конкретные требования для обеспечения такого безопасного режима работы.
4.7.2 Орудие не должно неожиданно начинать работу.
4.7.3 Орудие должно прекращать работу после подачи соответствующей команды.
4.7.4 Никакая часть орудия или удерживаемые им предметы не должны упасть или быть отброшены.
4.7.5 Автоматическая или ручная остановка любой движущейся части должна быть беспрепятственной.
4.7.6 Устройства защиты должны оставаться полностью эффективными.
4.7.7 Орудия, управляемые оператором дистанционно, должны быть спроектированы и сконструированы так, чтобы автоматически останавливаться в случае, если обнаруживаемая неисправность нарушает дистанционное управление оператора орудием.
4.7.8 Оператор должен иметь возможность приоритетного управления системами, управляемыми орудиями.
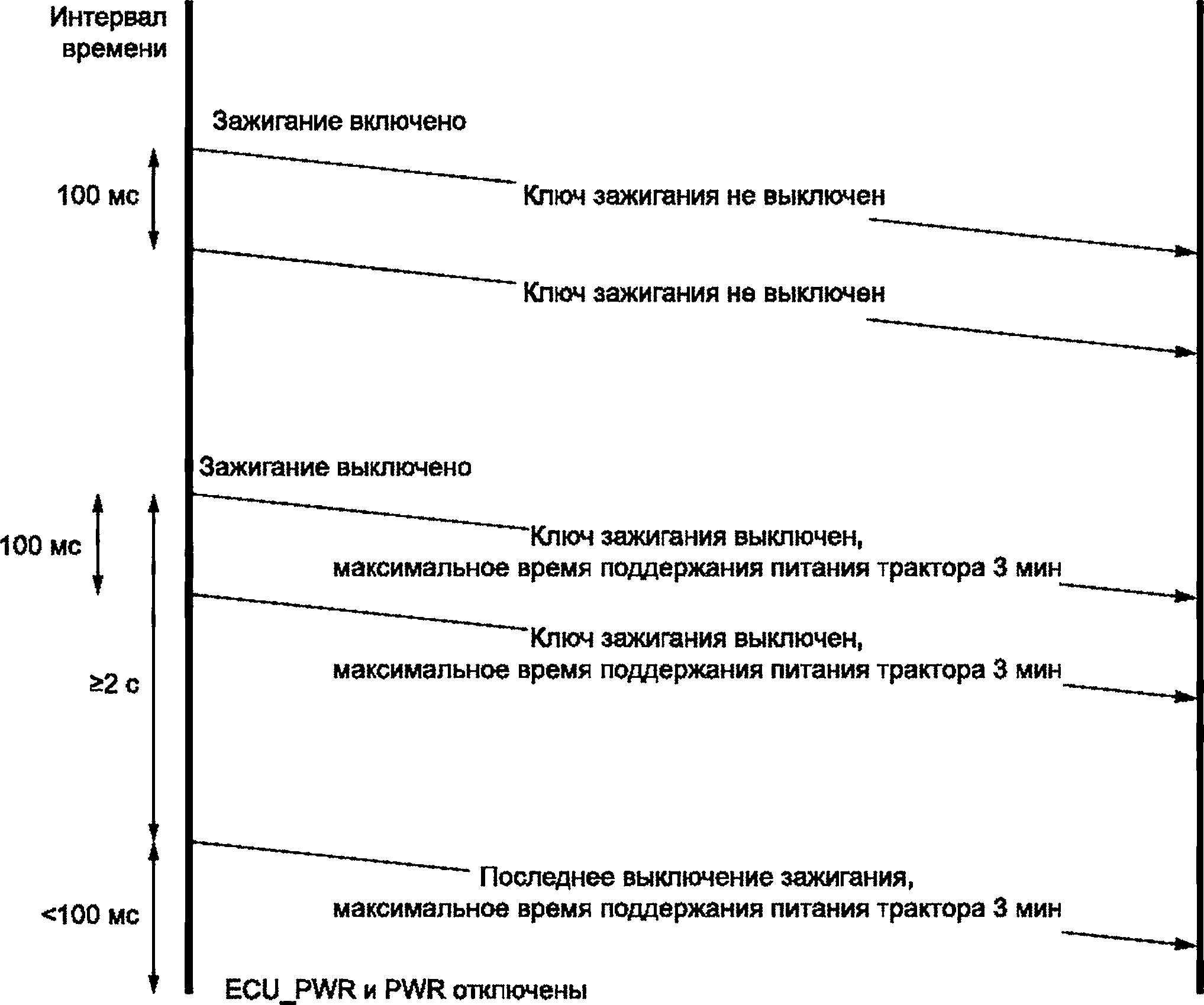 |
Рисунок 4 - Запрашивающая CF завершает работу до истечения максимального времени
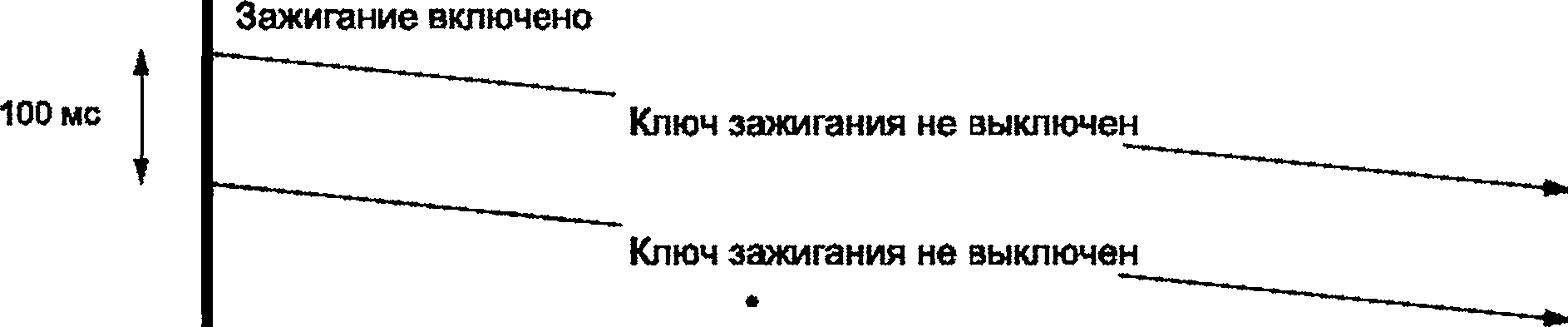 |
Рисунок 5 - Запрашивающая CF не завершает работу до истечения максимального времени
 |
Рисунок 6 - Запрашивающая CF завершает работу с первоочередным отключением PWR
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным и межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального и межгосударственного стандарта |
ISO 11783-1 | IDT | ГОСТ Р ИСО 11783-1-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 1. Общий стандарт на мобильную передачу данных" |
ISO 11783-2 | IDT | ГОСТ Р ИСО 11783-2-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 2. Физический уровень" |
ISO 11783-4 | IDT | ГОСТ Р ИСО 11783-4-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 4. Сетевой уровень" |
ISO 11783-5 | IDT | ГОСТ Р ИСО 11783-5-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 5. Управление сетью" |
ISO 11783-6 | IDT | ГОСТ Р ИСО 11783-6-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 6. Виртуальный терминал" |
ISO 11783-7 | IDT | ГОСТ Р ИСО 11783-7-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 7. Прикладной уровень сообщений для управления орудием" |
ISO 11783-8 | IDT | ГОСТ Р ИСО 11783-8-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 8. Сообщения для управления трансмиссией" |
ISO 11783-10 | IDT | ГОСТ Р ИСО 11783-10-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 10. Обмен данными между контроллером задач и информационной системой управления" |
ISO 11786 | - | * |
ISO 16154 | MOD | ГОСТ 32431-2013 (ISO 16154:2005) "Машины для сельского и лесного хозяйства. Монтаж устройств освещения и световой сигнализации для проезда по дорогам общего пользования" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичный стандарт; - MOD - модифицированный стандарт. | ||
Библиография
[1] | ИСО 11898-1:2003, Road vehicles - Controller area network (CAN) - Part 1: Data link layer and physical signalling |
[2] | SAE J 1939, Recommended Practice for a Serial Control and Communications Vehicle Network |
УДК 631.3:006.354 | ОКС 65.060.01 | ||
Ключевые слова: тракторы и машины сельскохозяйственные; последовательная сеть управления и передачи данных; электронный блок управления трактора | |||
{kind=link}