ГОСТ ISO 16001-2013
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
СИСТЕМЫ ОБНАРУЖЕНИЯ ОПАСНОСТИ И ВИЗУАЛЬНОЙ ПОМОЩИ
Требования к рабочим характеристикам и методы испытаний
Earth-moving machinery. Machinе-control systems (MCS) using electronic components. Performance criteria and tests for functional safety
МКС 53.100
Дата введения 2015-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью "Испытательный центр "Центральный научно-испытательный полигон строительных и дорожных машин" (ООО "ИЦ "ЦНИП СДМ") на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 267 "Строительно-дорожные машины и оборудование"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации по переписке (протокол от 27 декабря 2013 г. N 63-П )
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Настоящий стандарт идентичен международному стандарту ISO 16001:2008* Earth-moving machinery - Hazard detection systems and visual aids - Performance requirements and tests (Машины землеройные. Системы обнаружения опасности и визуальной помощи. Требования к рабочим характеристикам и испытания).
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить перейдя по ссылке на сайт . - .
Международный стандарт разработан Техническим комитетом по стандартизации ISO/TC 127 "Машины землеройные" Международной организации по стандартизации (ISO) и утвержден Европейским комитетом по стандартизации CEN в качестве европейского стандарта без внесения изменений.
Официальные экземпляры международного стандарта, на основе которого подготовлен настоящий межгосударственный стандарт, и международных стандартов, на которые даны ссылки, имеются в национальных органах по стандартизации.
Перевод с английского языка (en).
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам приведены в дополнительном приложении ДА.
Степень соответствия - идентичная (IDT).
Разработанный стандарт может быть использован при ежегодной актуализации перечня стандартов, содержащих правила и методы исследований (испытаний), а так же стандартов, в результате применения которых на добровольной основе обеспечивается соблюдение требований технического регламента Таможенного союза "О безопасности машин и оборудования".
5 Приказом Федерального агентства по техническому регулированию и метрологии от 19 марта 2014 г. N 173-ст межгосударственный стандарт ГОСТ ИСО 16001-2013 введен в действие в качестве национального стандарта Российской Федерации с 01 января 2015 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты" (по состоянию на 1 января текущего года), а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
1 Область применения
Настоящий стандарт устанавливает общие требования и описывает методы оценки и испытания эффективности системы обнаружения опасности (HDS) и визуальных вспомогательных средств (VA), используемых на землеройных машинах.
Настоящий стандарт включает следующие аспекты:
- распознавание людей в зоне обнаружения;
- визуальное и/или звуковое предупреждение(я) для оператора и/или лица в зоне обнаружения;
- эксплуатационная надежность системы;
- совместимость и экологические характеристики системы.
Это применимо к машинам, которые обозначены в ISO 6165. HDS и/или VA могут быть использованы для увеличения зоны прямой видимости оператора (см. ISO 5006) или непрямой видимости при помощи зеркал (см. ISO 14401) или могут предоставлять дополнительные средства обнаружения опасности, например, когда эргономические факторы ограничивают эффективность прямой видимости, чтобы избежать повторного поворота головы или верхней части тела.
________________
* Текст документа соответствует оригиналу. - .
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты*, для недатированных ссылок применяют последнее издание ссылочного документа:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 6165 Earth-moving machinery - Basic types - Identification and terms and definitions (Машины землеройные. Классификация. Термины и определения)
ISO 6394 Earth-moving machinery - Determination of emission sound pressure level at operator's position - Stationary test conditions![]() (Машины землеройные. Измерение уровня звукового давления на рабочем месте оператора. Постоянный режим испытаний)
(Машины землеройные. Измерение уровня звукового давления на рабочем месте оператора. Постоянный режим испытаний)
________________![]() Будет опубликован.
Будет опубликован.
ISO 9533 Earth-moving machinery - Machine-mounted forward and reverse audible warning alarm - Sound test method (Машины землеройные. Установленные на машине звуковые устройства тревожной сигнализации при перемещении и передние сигнальные устройства. Метод испытаний и критерии эффективности)
ISO 13766 Earth-moving machinery - Electromagnetic compatibility (Машины землеройные. Электромагнитная совместимость)
ISO 15998![]() Earth-moving machinery - Machine-control systems (MCS) using electronic components - Performance criteria and tests for functional safety (Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность)
Earth-moving machinery - Machine-control systems (MCS) using electronic components - Performance criteria and tests for functional safety (Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность)
________________![]() Будет опубликован.
Будет опубликован.
3 Термины и определения
В настоящем стандарте используются следующие термины с соответствующими определениями:
3.1 система обнаружения опасности HDS (hazard detection system HDS): Система, которая обнаруживает опасность и предупреждает оператора и/или лицо в рабочей зоне.
Примечание - Система в целом включает воспринимающее устройство, устройство для оповещения и устройство для оценки.
3.1.1 воспринимающее устройство (sensing device): Компонент HDS, который обнаруживает объект в зоне обнаружения.
3.1.2 устройство для оповещения (warning device): Компонент HDS, который передает информацию оператору и/или лицам, находящимся в зоне обнаружения, при помощи визуальных и/или звуковых сигналов.
3.1.3 устройство для оценки (evaluation device): Компонент или компоненты HDS, которые анализируют сигналы и информацию, передаваемую от измерительного устройства, и преобразовывают ее соответствующий сигнал для сигнального устройства.
3.2 визуальное средство VA (visual aid VA): Система, которая обеспечивает визуальную информацию без предупреждения.
Примечание - Система включает монитор и камеру.
3.2.1 монитор (monitor): Компонент VA, который обеспечивает визуальное изображение зоны обнаружения на экране.
3.2.2 камера (camera): Компонент VA, который передает на монитор изображение зоны обнаружения.
3.3 зона обнаружения (detection zone): Зона, в которой HDS обнаружила испытательный объект, и его показало VA.
3.4 испытательный объект (test body): Лицо или манекен, используемый(ое) для проверки геометрии и размеров зоны обнаружения.
Примечание - В зависимости от типа используемой системы испытательные объекты могут быть изменены (см. Приложения В-F).
3.5 самоконтроль (self-testing): Способность системы самостоятельно и постоянно проверять свое состояние и незамедлительно информировать оператора при помощи звукового сигнала и/или визуально о выходе ее из строя.
3.6 время обнаружения (detection time): Время, необходимое для HDS, чтобы обнаружить испытательный объект в зоне обнаружения и активизировать сигнальное устройство.
3.7 готовность системы (stand-by): Режим, в котором системы обнаружения опасности и визуальные системы активизированы, но никакая информация не передается на предупреждающее устройство или монитор.
3.8 организация рабочего места (job-site organization): Правила и процедуры для управления совместной работой машин и людей на рабочей площадке.
ПРИМЕР - Инструкции по технике безопасности, схемы движения, запретные зоны, обучение обслуживающего персонала, оборудование, опознавательные знаки, системы связи.
4 Технические требования и методы испытаний
4.1 Общие требования
4.1.1 Определение зоны обнаружения
Испытаниям должна подвергаться система, установленная на конкретной машине или типовом представителе, в соответствии с приложениями B-F.
4.1.2 Требования к испытательному объекту
Требования к испытательному объекту указанны в приложениях В-F.
4.1.3 Внешние условия
Испытания должны проводиться при следующих внешних условиях:
- температура (23±5) °С;
- относительная влажность (60±25)%.
На испытания не должны влиять отражения от окружающих стен, испытательного оборудования или других объектов.
Для получения дополнительной информации см. приложения В-F.
4.1.4 Оценка результатов испытаний
4.1.4.1 Обнаружение
Обнаружение должно осуществляется с непрерывной подачей сигнала или передачей информации соответствующей зоне предупреждения. Для получения дополнительной информации см. приложения В-F.
4.1.4.2 Оценка ложных сигналов
Ложные сигналы, например перечисленные ниже, должны быть сведены к минимуму:
- при приближении машины к рампе;
- из-за объектов вне зоны обнаружения;
- из-за погодных условий: тумана, снега, дождя, ветра, пыли и т.п.
4.2 Расположение и монтаж устройств HDS и VA
Устройства должны быть расположены и установлены на машине в соответствии со спецификацией изготовителя устройства так, чтобы:
- устройство не ограничивало любую функцию или действие машины;
- устройство было защищено от внешних повреждений;
- предотвратить несанкционированное снижение эффективности или демонтаж;
- ограничить воздействие или увеличение динамических нагрузок, температуры, ударов и вибрации, которые могут преждевременно привести к повреждению устройства;
- расположение и надежность крепления устройств HDS и VA не влияло на целостность защитных сооружений, например конструкции для защиты кабины оператора в случае опрокидывания (ROPS);
- обеспечить доступ для технического обслуживания с земли или с площадки.
4.3 Устройства на рабочем месте оператора
4.3.1 Расположение монитора
Монитор должен быть расположен в поле зрения оператора. Ограничение видимости оператора, рабочей зоны или рабочего оборудования машины должно быть сведено к минимуму.
Если монитор используется для отображения зоны позади машины, то система должна быть настроена на обеспечения обратного изображения на мониторе.
Чтобы видеть человека на максимальной границе зоны обнаружения, монитор должен отображать рост пятого процентиля человека (см. ISO 3411), размер изображения на мониторе должен быть равен 7 мм. Монитор должен находиться в пределах 1,2 м от точки глаз оператора. Монитор должен быть расположен таким образом, чтобы свести к минимуму блики, вызванные прямыми солнечными лучами.
Примечание - Факторы, влияющие на способность оператора обнаруживать человека на мониторе, зависят от положения монитора в кабине, расстояния от оператора до монитора, от размеров монитора, освещенности, объектива камеры, расстояния от объекта до объектива.
4.3.2 Сигнальные устройства
Звуковые и визуальные сигнальные устройства должны применяться для HDS. Эти устройства предоставляют данные оператору и могут содержать указания для рабочих и других лиц, присутствующих на рабочей площадке.
4.3.2.1 Звуковые сигнальные устройства
Устройство для предупредительной сигнализации на рабочем месте оператора должно быть или с заранее установленным, или настраиваемым автоматически уровнем звука, превышающим по крайней мере на 3 дБ уровень окружающего шума, измеренным при максимальной управляемой скорости без нагрузки.
Все предупреждающие сигналы должны быть четко слышимы в кабине оператора. Предупреждающий сигнал должен быть в диапазоне частот 500-2500 Гц.
Аварийный сигнал на рабочем месте оператора должен быть отличим от других звуков в кабине (например, сигнала предупреждения или шума машины).
Примечание - Это может быть достигнуто путем изменения спектральных характеристик и временного распределения сигналов (см. ISO 9533).
4.3.2.2 Визуальные сигнальные устройства
Предупреждающие сигналы в кабине должны быть установлены в зоне прямой видимости оператора и должны быть видимыми при прямом солнечном свете. Предупреждающие сигналы должны быть отличимы от других видов предупреждений на приборной панели; наиболее значимые предупреждения должны быть обозначены мигающим красным светом.
4.3.2.3 Внешние устройства для предупреждения
Если внешнее сигнальное устройство установлено как часть HDS, то внешние сигналы тревоги должны соответствовать требованиям ISO 9533. Внешние визуальные сигнальные устройства, если таковые установлены, должны быть видимыми для людей в зоне обнаружения.
4.4 Активация системы и первоначальная проверка
Система должна активизироваться автоматически при запуске двигателя, выполнять начальное тестирование и давать надлежащие функциональные указания. Для визуальной вспомогательной системы индикацией правильного функционирования должно быть четкое изображение зоны обнаружения на экране монитора.
В случае неисправности HDS предупреждение должно быть передано оператору.
Система может войти в режим ожидания, пока выбирается соответствующий режим движения машины.
Если установлено несколько камер или датчиков, то система должна автоматически выбирать камеры или датчики, соответствующие направлению движения.
4.5 Обнаружение и время отклика
Обнаружение и время реагирования не должно превышать 300 мс после активизирования системы или после выхода из спящего режима.
Время обнаружения и время отклика системы - это время с момента выбора оператором нужного режима движения машины, в течении которого система не способна обнаружить человека.
4.6 Эксплуатационная пригодность
4.6.1 Общие требования
Эксплуатационная пригодность устройств HDS и VA должна соответствовать требованиям ISO 15998 и ISO 13766.
4.6.2 Непрерывный самоконтроль
Наличие изображения зоны обнаружения на мониторе является достаточным для контроля за функционированием устройства VA.
Система HDS должна иметь постоянно действующую функцию текущего контроля, включая:
а) основной световой индикатор (зеленый);
б) резервный световой индикатор - мигающий желтый или зеленый (см. 4.3.2.2);
в) визуальный и/или звуковой аварийный сигнал, если работа системы нарушена, в том числе контроль над каждым каналом связи HDS, который включает текущий контроль всех машинных сигналов, используемых для работы системы;
- разрыв провода;
- короткое замыкание;
- время управления (если применяется);
- выходной и входной сигналы;
- проверка системы.
4.7 Системное ограничение
Должна быть предусмотрена невозможность блокировки устройства предупреждения простым отключением. Способ приведения в действие сигнального устройства должен быть таким, чтобы оператор не мог легко повлиять на его надежную работу. Любые исключения должны быть указаны в соответствии с приложениями В-F.
4.8 Окружающая среда и условия эксплуатации
Системы HDS и VA должны соответствовать требованиям ISO 15998 в отношении окружающей среды и условий эксплуатации со следующими исключениями:
- температура: от -30 °С до 60 °С;
- вибрация: -10![]() в диапазоне 5-100 Гц (4,5
в диапазоне 5-100 Гц (4,5![]() для компонентов в кабине);
для компонентов в кабине);
- ударная нагрузка: -10![]() для внешних компонентов (4,5
для внешних компонентов (4,5![]() для компонентов в кабине).
для компонентов в кабине).
Примечание - Для достижения современных требований по температуре, вибрации и ударной нагрузке, указанных в ISO 15998.
5 Маркировка и идентификация
Каждое устройство должно иметь четкую и несмываемую маркировку со следующей информацией:
- производитель;
- тип/модель;
- изделие/серийный номер;
- необходимые маркировки в соответствии с требованиями.
6 Руководство по эксплуатации
Устройства HDS и VA должны быть снабжены руководством по эксплуатации, содержащим положения технической инструкции и техники безопасности при использовании таких систем, а именно:
- описание функций системы;
- подробное описание характеристик и эксплуатационных ограничений, в частности влияние различных монтажных высот и углов;
- информация об организации рабочего места;
- погодные ограничения;
- климатические ограничения;
- инструкции по обслуживанию;
- инструкции по установке и монтажу, включая монтаж на месте;
- инструкция по включению;
- описания управления;
- инструкция по безопасной эксплуатации;
- инструкция по выполнению поверки;
- инструкции по действиям в случае нарушения нормальной работы;
- информация для связи с другими компонентами (при необходимости);
- требования сертификации, например, по электромагнитной и высокочастотной совместимости, а также соответствующие сертификационные испытания (если это требуется региональным регулирующим органом);
- страны, с которыми было достигнуто соглашение о признании одобрения типа средств измерений (если требуется);
- рекомендуемая процедура для регулярного выполнения проверки систем HDS и VA пользователем;
- требование к электрическому питанию.
Приложение А (справочное). Выбор систем HDS и VA
Приложение А
(справочное)
А.1 Введение
Устройства HDS и VA могут быть использованы в дополнение к прямым и вспомогательным визуальным устройствам для оператора. При их выборе следует рассматривать информацию, в которой нуждается оператор, а также его способность реагировать на нее. Существует множество требований к внимательности оператора при выборе HDS и VA. Тщательное внимание следует уделить такому виду визуальной или звуковой информации, который будет привлекать оператора в большинстве случаев при возникновении опасности. Всегда существует риск, что визуальная информация будет не увидена. Звуковая информация может привлечь внимание оператора, но будет игнорироваться, если предоставляется слишком много лишних предупреждений.
Важно отметить, что устройства HDS и VA имеют свои преимущества и недостатки. Не существует устройства, которое работает в полной мере для покрытия желаемой зоны обнаружения в любых ситуациях. Однако некоторые недостатки могут быть компенсированы путем объединения двух или более технических решений. Преимущества и недостатки некоторых методов приведены в таблице А.1.
Таблица А.1 - Преимущества и недостатки систем HDS и VA
Технология | Описание | Преимущества | Недостатки | Диапазон |
Линза Френеля | Тонкий плоский объектив, использующий концентрические круговые канавки на ее поверхности. Канавки действуют подобно призмам, преломляющим и фокусирующим свет | Позволяет водителю увидеть объекты ниже нормального положения линии зрения при вождении | Изображение может | По горизонтали: более 90°. |
Зеркало | Отражающая поверхность, предоставляющая непрямой обзор | Низкие эксплуатационные расходы и простота использования | Требует хорошего освещения. | Потенциально большой диапазон в зависимости от оптических характеристик |
Различающие наружные сигнализации | Использование датчиков для включения предупредительной сигнализации | Активируется, когда машина движется. Предупреждает только, когда объект обнаружен | Для избежания воздействия на пешехода, находящегося на пути следования машины. | Варьируется в зависимости от излучаемой мощности, частоты, монтажного положения и условий окружающей среды |
Ультразву- | Наличие и расстояние до объекта определяется по времени возвращения отраженных импульсов | Точное указание расстояния до объекта. Наличие светодиодной и звуковой сигнализации для оператора | Время запаздывания сигнала ограничивает реагирование, чтобы замедлить транспортное средство. | По горизонтали максимум 6 м |
Радар с фиксированной передаваемой частотой Доплера | Микроволновое излучение испускается и отражается от движущегося объекта, разность частот указывает на движение | Низкая стоимость. Отражается от большинства источников опасностей. Невосприимчивость к грязи на поверхности радара. | Сложность распознавания стационарных объектов. Расстояние может быть определено по интенсивности отраженного сигнала. | Дальность неограничена (см. в разделе "недостатки"). |
Радар с переключаемой частотой Доплера | См. выше, только передаются две или несколько частот в пошаговом режиме | Можно измерить дальность. Отражается от большинства источников опасности. | Измеряемая дальность - это средневзвешенная дальность всех объектов. Поэтому малоразмерные цели, близко расположенные к датчику, могут быть замаскированы большими целями, находящимися дальше. Нет функции предотвращения опасных последствий при выходе из строя. | Дальность неограничена (см. в разделе "недостатки"). |
Импульсный радар | Наличие и расстояние до объекта определяется по времени возвращения отраженных импульсов | Можно определить дальность многочисленных целей | Могут восприниматься объекты вне пути следования транспортного средства | Дальность может быть ограничена. |
Непрерывный частотно-модулиро- | См. выше, передаваемая частота колеблется между верхними и нижними частотами | Можно определить дальность многочисленных целей. | Могут восприниматься объекты вне пути следования транспортного средства | Дальность неограничена. |
Замкнутая Телевизионная система | Устройство использует камеру с широкоугольным объективом и монитором в кабине | Устойчива к воздействию влаги и возникновению царапин от пыли. Работает при низкой освещенности | Искажения затрудняют оценку расстояний. Прямой свет на камере создает проблемы видимости. Прямые солнечные лучи засвечивают изображение на мониторе. Трудно различимы объекты, находящиеся в тени. Грязь и пыль на объективе камеры могут искажать изображение. Может быть удалено с помощью встроенных систем омывания и очистки | По горизонтали: до 127°, по вертикали: до 115° |
Инфракрасное излучение пассивное | Восприятие изменений инфракрасного излучения объектов | Идеально различает человека и фон | Чувствительность к грязи, воде, вибрации. Невозможно измерить расстояние. Невозможно отличить близко стоящего человека от далеко находящегося двигателя | Может быть ограничен в этом приложении (см. в разделе "недостатки"). |
Инфракрасное излучение активное | Наличие и расстояние до объекта определяется по времени возвращения отраженных импульсов | Не определены | Не определены | Не определены |
Контактный способ | Тормоза приводятся в действие после того как срабатывает выключатель, надетый на стержень бампера | Простой и относительно недорогой | Не подходит для всех машин. Никакого предварительного обнаружения. Не считается безопасным для пешеходов. Подходит только для применения на очень малой скорости | Определяется размерами устройства |
Электро- | Радиоволны осуществляют взаимодействие между транспортным средством и магнитной биркой, которую носят рабочие или устанавливают на других препятствиях | Взаимное предупреждение для обеих сторон. Контролирует все направления | Невозможно обнаружить объект, не имеющий магнитной бирки. Мощность излучения слишком мала, чтобы пройти сквозь тело человека и охватить всю зону обнаружения. Радиоволны направлены так же, как ультразвуковой ретранслятор (см. Е.4.1). Могут воспринимать человека за пределами необходимой зоны обнаружения. | Регулируемый: до 20 м в каждом направлении |
Лазер | Системы с программным обеспечением, использующие лазерный импульс и поворотный рефлектор | Зона обнаружения может быть точно настроена. Для разных зон можно установить разные действия машины (например, применение тормоза, подача сигнала и т.д.) | Критичен к помехам от прямых солнечных лучей. Туман или столбы дыма могут выступать в качестве экрана. | Максимальная практическая дальность до 8 м. Угол сканирования 180°. |
Ультра- | Двусторонняя ультразвуковая волновая связь между "устройством обнаружения" на транспортном средстве и "маячками", которые носят рабочие | Может регулироваться на требуемую дальность обнаружения. | Невозможно обнаружить объект, не имеющий "маячка" | Максимальная дальность обнаружения 12 м. |
Цветовое распознавание CCTV | Анализируется CCTV изображение для обнаружения определенного цвета, в который окрашена одежда рабочих | Взаимное предупреждение для обеих сторон. | Отсутствие контроля без цветовой маркировки | От 10 до 15 м, ширина в зависимости от угла объектива камеры |
Основные технические решения постоянно совершенствуются. Поэтому некоторые недостатки могут быть решены в ходе дальнейшего развития.
А.2 Рассмотрение функциональных аспектов систем HDS и VA
А.2.1 Общие требования
Следует рассматривать отслеживающие функции машины, а также эксплуатационные и окружающие условия работы HDS и VA.
А.2.2 Требования к оператору и его способность взаимодействовать с системой
Требования к оператору, например:
- невосприимчивость ложного сигнала тревоги;
- время и частота наблюдения за зрительной системой;
- возможность информационной перегрузки, когда используются несколько HDS и VA;
- человеческий фактор, например время реакции, подготовка и обучение;
- тип предупреждения, необходимый для оператора или лица в зоне обнаружения.
А.2.3 Окружающая среда
Окружающая среда может находиться под влиянием:
- открытого, перегруженного или ограниченного места;
- климатических условий;
- условий местности, например пыли, воды, света, контрастного фона, погоды;
- источников помех, таких как другие машины, сильные отражатели или излучатели.
А.2.4 Функции устройства
Функциями устройства могут быть:
- охватывание опасной зоны;
- анализ движения машины и ее действий на рабочей площадке;
- учитывание реальной компоновки;
- прогнозирование скорости движения;
- определение радиуса поворота;
- учитывание влияния шарнирных соединений;
- определение тормозного пути.
А.3 Выбор систем HDS и VA
Система должна быть выбрана с учетом следующих характеристик:
- визуального и сенсорного обнаружения;
- активного или пассивного реагирования;
- отдельного или совместного применения визуального и звукового предупреждения;
- времени реакции;
- зоны обнаружения;
- эксплуатационной пригодности;
- наличия защитных устройств;
- наличия блокировки, приглушения и ограничения требований к системе;
- наличия ложных сигналов;
- эксплуатационных требований и требований по обслуживанию и уходу;
- требований эффективности проверки, например периодическая проверка зоны обнаружения.
Приложение В (обязательное). Процедура испытаний для системы замкнутого телевидения (CCTV). Дополнительные требования к эффективности и испытаниям
Приложение В
(обязательное)
В.1 Введение и цель испытаний
Эти испытания предназначены для оценки эффективности систем замкнутого телевидения CCTV, предназначенных для использования на землеройных машинах. Критериями эффективности являются:
а) качество изображения, представленного разложением на составляющие TV -линии или аналогичным способом; основано на определении разрешения по штриховым шкалам на испытательном объекте (см. В.2);
б) предел эксплуатационного уровня освещенности для поддержания минимального предполагаемого разрешения;
в) вертикальные и горизонтальные поля зрения системы;
г) дальность обнаружения (см. 4.3.1);
д) маскировка при прямом облучении светом высокой интенсивности;
е) время, необходимое системе для полного реагирования на быстрые изменения освещенности.
Эти испытания не предназначены для определения критериев эффективности, связанных с высотой установки камеры. Критерии эффективности, описанные в этих испытаний, предполагают условия эксплуатации со средней освещенностью 50 лк и минимальной 20 лк.
В.2 Испытательный объект
В качестве испытательного объекта должен быть использован манекен "Rotakin", имеющий контрастную окраску и описанный в EN 50132-7:1996, приложение А.
В.3 Испытательная площадка
Размеры площадки для испытаний: в помещении - 5 м![]() 5 м, вне помещения - 30 м
5 м, вне помещения - 30 м![]() 8 м.
8 м.
В.4 Окружающая обстановка
Окружающая обстановка должна быть равномерно освещена, свободна от затененных областей и отражений в поле обзора.
В.5 Монтаж и установка
В.5.1 Компоновка
CCTV система должна быть собрана в соответствии с инструкциями производителя.
В.5.2 Позиционирование и выравнивание
В.5.2.1 Камера
Камера должна быть выровнена по вертикали и горизонтали по отношению к испытательному объекту.
В.5.2.2 Испытательный объект
Испытательный объект должен быть расположен вертикально и обращен к камере в центре поля обзора, а также перпендикулярно к оптической оси объектива.
Если не указано иное, то изображение испытательного объекта по вертикали должно занимать весь угол обзора монитора.
В.5.2.3 Монитор
Монитор должен быть установлен и выровнен нормально по отношению к лицу наблюдателя, на удобной высоте, а также свободен от яркого света и отражений.
В.6 Горизонтальное испытание
В.6.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.6.2 Процедура испытаний
Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта. Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора. Отметьте эту точку.
Точно также определите и отметьте точку для противоположной стороны экрана монитора. Измерьте и зарегистрируйте расстояние между этими двумя точками. Тригонометрическим расчетом определите горизонтальное поле обзора.
В.7 Вертикальное испытание
В.7.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.7.2 Процедура испытаний
Поверните камеру и монитор на 90°. Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта. Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора. Отметьте эту точку.
Точно также определите и отметьте точку для противоположной стороны экрана монитора. Измерьте и зарегистрируйте расстояние между этими двумя точками. Тригонометрическим расчетом определите вертикальное поле обзора.
В.8 Дальность
В.8.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.8.2 Процедура испытаний
Переместите испытательный объект вдоль оптической оси камеры в точку, в которой высота изображения испытательного объекта на экране составляет 7 мм. Измерьте и зарегистрируйте расстояние от испытательного объекта до камеры.
Примечание - Для эффективной эксплуатационной дальности системы принята за основу минимальная высота экрана 7 мм. Это примерно 10% от вертикальной высоты экрана, которая обычно считается приемлемой для визуального обнаружения.
В.9 Дополнительные испытания
В.9.1 Разрешение системы
В.9.1.1 Уровень освещенности
Уровень освещенности должен быть более 20 лк и менее 200 лк.
В.9 1.2 Процедура испытаний
Установите испытательный объект на таком расстоянии от камеры, чтобы его изображение занимало 100% высоты посередине экрана монитора.
Определите и зарегистрируйте разрешение системы CCTV по штриховому клину на манекене из комплекта шкал Н-А.
В.9.1.3 Критерии испытания
Должно быть достигнуто разрешение более 200 TV-линий или аналогичный эквивалент [см. В.1, а)].
В.9.2 Влияние освещенности на разрешение
В.9.2.1 Проведение испытания
Повторите процедуру В.9.1.2, меняя пошагово, от самого низкого до самого высокого, уровень освещенности, который указан в технических данных производителя. Запишите уровень освещенности, при котором наблюдается минимально приемлемый уровень разрешения.
В.9.2.2 Критерии испытания
Должно быть достигнуто разрешение более 200 TV-линий или аналогичный эквивалент [см. В.1, а)] во всем указанном диапазоне уровня освещенности или указанный диапазон должен быть уменьшен до диапазона, соответствующему разрешению 200 TV-линий.
В.9.3 Искажение по краям экрана
В.9.3.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.9.3 2 Процедура испытаний
Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта.
Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора.
Перемещайте испытательный объект по этой дуге до точки, в которой наблюдатель воспринимает объект на экране монитора как находящийся на краю видимости.
Измерьте и зарегистрируйте высоту изображения испытательного объекта.
В.9.3.3 Критерии испытаний
Изображение должно наблюдаться без уменьшения размеров на краю для 25% высоты испытательного объекта.
В.9.4 Разрешение по краям экрана
В.9.4.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.9.4.2 Проведение испытаний
Установите испытательный объект (манекен) на 100% вертикальной высоты экрана монитора.
Переместите испытательный объект в одну сторону экрана.
Измерьте и зарегистрируйте разрешение.
Поверните испытательный объект на 180° и повторите эту процедуру для противоположной стороны края экрана.
В.9.4.3 Критерии испытания
Должно быть достигнуто минимальное разрешение 200 TV-линий или аналогичный эквивалент [см. В.1, а)]. Если это разрешение не будет достигаться по всей ширине экрана монитора, то поле обзора должно определяться углом, при котором такое разрешение достигается.
В.9.5 Влияние света высокой интенсивности
В.9.5.1 Уровень освещенности
Испытание должно проводиться на открытом воздухе под прямыми солнечными лучами.
В.9.5.2 Процедура испытаний
Наведите камеру прямо на солнце, чтобы произвести маскировку на мониторе.
Поместите испытательный объект перед камерой и затем отодвигайте его от камеры до тех пор, пока изображение испытательного объекта целиком не скроется маскировкой.
Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта, а также ширину маскировки. Эти измерения должны проводиться на уровне плеча испытательного объекта (манекена).
В.9.5.3 Критерии испытания
Если не указано иное, то максимальная ширина маскировки должна быть не более 5% от ширины экрана монитора.
В.9.6 Восстановление после радикального изменения уровня освещенности
В.9.6.1 Уровень освещенности
Поместите испытательный объект напротив ярко освещенного фона на возвышении, чтобы его было видно в деталях без слияния со второстепенными объектами на экране монитора.
В.9.6.2 Процедура испытаний
Поместите затвор на камеру и удерживайте в течение 5 с.
Снимите затвор.
Измерьте и зарегистрируйте время, за которое силуэт испытательного объекта станет ясно различимым.
В.9.6.3 Критерии испытаний
Время восстановления должно быть не более 1,5 с, если не указано иное.
В.10 Функциональные испытания
Проверьте работу дополнительных функций системы, таких как нормальное/зеркальное изображение и настройки день/ночь для монитора.
Примечание - Некоторые системы могут быть включены для использования вперед или назад. В прямом использовании изображение на мониторе, как правило, установлено в нормальном изображении, при заднем использовании - в зеркальном отражении. Если две системы камер, одна для прямого использования, другая для использования назад, должны быть подключены к одному монитору, то может потребоваться автоматическое переключение между зеркалом и нормальным видом.
В.11 Регистрация данных
В.11.1 Информация
Должна быть зарегистрирована следующая информация о системе видеонаблюдения:
- технические характеристики монитора и камеры;
- длина кабеля;
- номер модели;
- серийный номер;
- дата испытаний(я).
В.11.2 Оценка испытаний
Оценка испытаний, полученная в результате тестов В.6, В.7 и В.8, должна быть зарегистрирована, как показано на рисунках В.1 и В.2.
Рисунок В.1 - Горизонтальное поле зрения
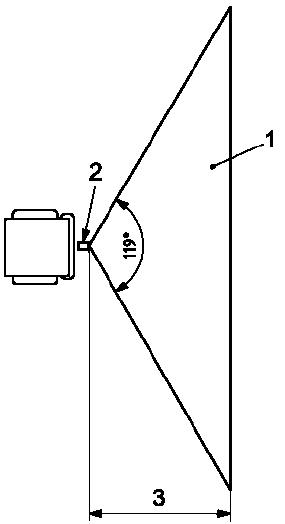
1 - зарегистрированные угол и диапазон; 2 - камера; 3 - дальность, в метрах.
Рисунок В.1 - Горизонтальное поле зрения
Рисунок В.2 - Вертикальное поле зрения
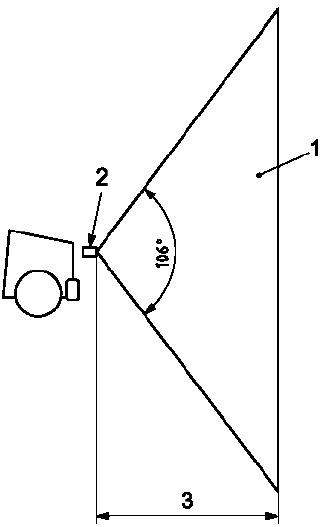
1 - зарегистрированные угол и диапазон; 2 - камера; 3 - дальность, в метрах.
Рисунок В.2 - Вертикальное поле зрения
В.11.3 Фактические значения
Фактические значения, измеренные в испытании В.9, должны быть зарегистрированы с соответствующими критериями испытаний.
В.11.4 Функциональная производительность
Функциональная производительность в тесте В.10 должна быть зарегистрирована как положительный или отрицательный результат для каждой функции.
Приложение С (обязательное). Процедура испытаний для радарных датчиков
Приложение С
(обязательное)
С.1 Введение
Этот процедура описывает метод определения зоны обнаружения для радиолокационных систем, используемых с целью обнаружения препятствий вблизи землеройных машин. Процедура предназначена для определения геометрии трехмерной зоны, в которой человек будет гарантированно обнаружен.
Эта процедура не оценивает положение данной зоны по отношению к машине, на которой установлен радар. Практически применения трехмерной зоны для землеройных машин приведены в С.11.
С.2 Испытательный объект
В качестве испытательного объекта принимают ту часть человеческого тела, которая вступает в зону обнаружения. В некоторых случаях первой частью тела, вступающей в зону обнаружения, является голова. Таким образом, эта процедура использует обнаружение исключительно головы как точки измерения границ зоны обнаружения.
Примечание - Обнаружена большая достоверность результатов для реальных людей различных размеров, чем для искусственных заменяющих объектов. Поэтому данная испытательная процедура разработана для реального человека.
С.3 Испытательная площадка
Испытательная площадка должна быть открытой, с ровной поверхностью, с покрытием из сухого песка и/или гравия.
На испытательной площадке не должно быть камней, листвы или мусора диаметром более 8 см. Непосредственно перед радарной системой в пределах ~50 м не должны находиться большие объекты типа зданий или куч. С боковых сторон крупные объекты не должны находиться в пределах 25 м. Все сотрудники, за исключением проводящих испытания, должны находиться в зоне, не обнаруживаемой радаром.
На площади, равной ожидаемой зоне обнаружения, должна быть нанесена прямоугольная сетка с интервалом 1 м.
С.4 Условия испытаний
Условия испытаний должны соответствовать требованиям 4.1.3.
С.5 Место установки радара
Радар должен быть установлен на неподвижный штатив (стенд) в порядке, описанном в процедуре испытаний. Ни одна часть стенда не должна быть в пределах зоны обнаружения радара.
Крепление радара должно иметь приспособление для изменения наклона радара в вертикальной плоскости на угол, требуемый процедурой испытаний, а также средства измерения угла наклона.
С.6 Процедура испытаний
С.6.1 Общие требования
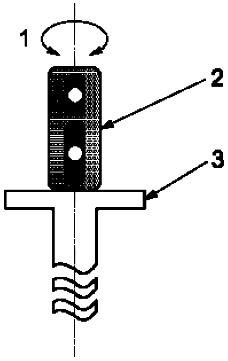
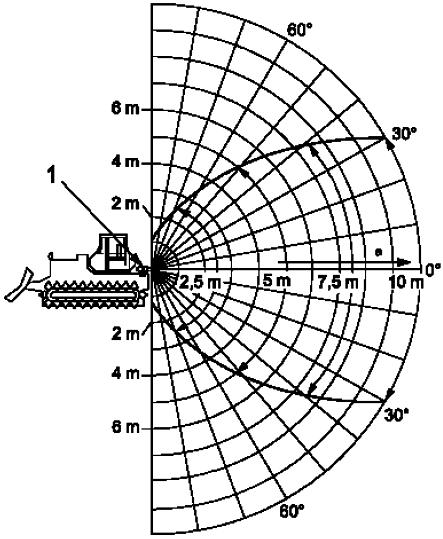
Радиолокационные датчики излучают и принимают в рамках конического пучка, который может иметь круговое или эллиптическое сечение. Полная геометрия зоны может быть определена путем измерения горизонтальных и вертикальных границ зоны обнаружения, как показано на рисунке С.1.
Рисунок С.1 - Измерение полной геометрии зоны обнаружения
Рисунок С.1 - Измерение полной геометрии зоны обнаружения
С.6.2 Измерение горизонтальных границ
Установите радар на машине, ориентировав его стандартно, но с расширяющимся по горизонтали пучком и центральным лучом на высоте носа испытуемого человека.
Установите сигнальное устройство там, где оно может быть услышано испытуемым и лицом, производящим испытание.
Поместите испытуемого на расстоянии 0,5 м от радара на центральной линии ожидаемой зоны обнаружения. Если устройство предупреждения указывает обнаружение, то испытуемый перемещается боком в обоих направлениях до тех пор, пока обнаружение не прекратится. Зарегистрируйте последнюю позицию на каждой стороне, где происходит обнаружение. Зарегистрируйте также любую позицию между этими двумя точками, где также не происходит обнаружение.
Поместите испытуемого еще на 0,5 м от радара и повторите описанную выше процедуру.
Повторяйте эту процедуру с интервалом 1 м от радара, пока обнаружение не прекратится.
Зарегистрируйте горизонтальные границы зоны обнаружения. Зарегистрируйте любую область в пределах этой зоны, где обнаружение не происходило.
С.6.3 Измерения вертикального предела
Поместите испытуемого на расстоянии 0,5 м от радара на центральной линии горизонтальной зоны обнаружения. Если происходит обнаружение, то увеличивайте вертикальный угол до тех пор, пока обнаружение не прекратится. Затем зарегистрируйте максимальный угол вверх, где обнаружение имеет место.
Повторите тест на расстоянии 1 м от радара и дальше с интервалом 1 м до конца горизонтальной зоны обнаружения.
Переверните радар так, чтобы обычная верхняя часть зоны обнаружения была внизу. Убедитесь, что центральный луч вновь находится на одном уровне с носом испытуемого.
Повторите описанные выше испытания, чтобы зарегистрировать угол, при котором обнаружение происходит на каждом расстоянии от радара.
С.7 Адаптация процедуры испытаний для различных типов радаров
Некоторые типы радаров могут использовать относительное движение между радаром и испытательным объектом в методе обнаружения. Если эта функция дополнительная, то для этого испытания она должна быть отключена. Если она не может быть выключена, то испытуемый должен имитировать требуемое движение.
Регистрируют следующее:
а) метод обнаружения не требует движения;
б) требование движения отключается;
в) движение всегда требуется.
Если движение всегда требуется, то нужно записать вид движения, скорость и/или расстояние.
С.8 Адаптации испытания для радиолокационных датчиков с программируемыми зонами обнаружения
Если датчик радара может быть запрограммирован для создания разнообразных зон обнаружения с различными формами и размерами, то испытания, указанные в С.6.2 и С.6.3, должны быть использованы для подтверждения максимальных размеров зоны обнаружения, которая может быть запрограммирована, как указано производителем.
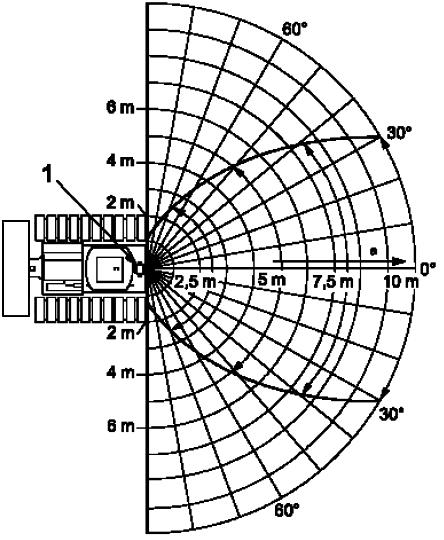
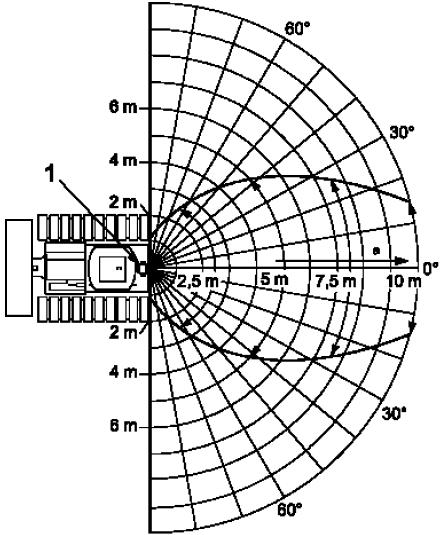
С.9 Регистрация граничных точек обнаружения
Граничные точки обнаружения в горизонтальной плоскости должны быть показаны на диаграмме с сеткой 1 м, как изображено на рисунке С.2.
Рисунок С.2 - Граничные точки обнаружения на горизонтальной плоскости
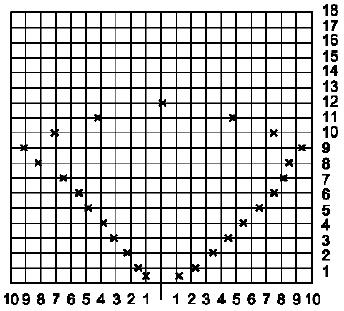
Рисунок С.2 - Граничные точки обнаружения на горизонтальной плоскости
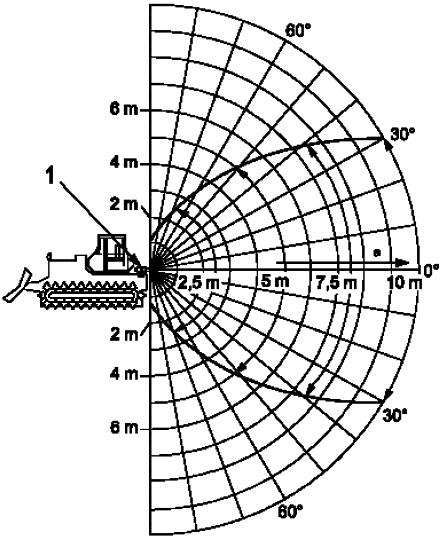
Граничные точки обнаружения в вертикальной плоскости должны быть показаны на диаграмме с дугами с интервалом 1 м, как изображено на рисунке С.3.
Рисунок С.3 - Граничные точки обнаружения на горизонтальной плоскости
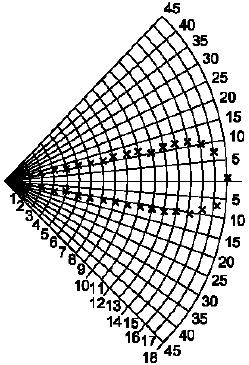
Рисунок С.3 - Граничные точки обнаружения на горизонтальной плоскости
С.10 Дополнительные испытания
С.10.1 Сигналы от крупных объектов вне зоны обнаружения
Большие объекты, такие как другие машины, могут быть обнаружены при больших углах и расстояниях, чем человек, что может создать ложные сигналы. Испытание пункта С.6.2 повторяют с использованием трехгранного металлического отражателя в качестве испытательного объекта, как показано на рисунке С.4. Устанавливают испытательный объект на высоте горизонтальной оси пучка радара с вогнутой поверхностью, направленной в сторону радара. Регистрируют зону обнаружения так же, как для человека.
Примечание - Поскольку, как доказано на практике, трудно получить устойчивые результаты для любого испытательного объекта, имитирующего большую структуру, это испытание нужно рассматривать как ориентировочное определение зоны обнаружения для крупных объектов.
Рисунок С.4 - Испытательный объект, имитирующий большую структуру
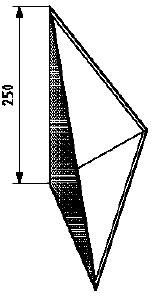
Рисунок С.4 - Испытательный объект, имитирующий большую структуру
С.10.2 Подавление сигнала обнаружения крупными объектами на заднем плане
Некоторые методы измерения дальности с помощью радара могут допускать преобладание больших объектов на заднем плане по сравнению с меньшими объектами, находящимися ближе к радару, а также маскировать их присутствие.
Изготовитель должен указать, какие методы используются, и объяснить, какие дополнительные меры могут минимизировать этот эффект.
При стандартных испытаниях этот эффект может давать ошибочные результаты, поскольку в них не применяются дополнительные методы для минимизации такого эффекта. Там, где такие методы используются, изготовитель должен описать испытания с использованием испытательного объекта, приведенного на рисунке С.4, чтобы продемонстрировать степень снижения этого эффекта.
С.11 Практические указания установки радаров на машинах
Изготовитель должен включить в инструкции практические указания для установки радаров на машинах с учетом следующего.
Вышеупомянутые испытания описывают трехмерную зону, в которой происходит обнаружение, если достаточно большая часть человеческой фигуры попадает в эту зону. Испытания проводятся на человеке, но и другие объекты, в том числе поверхность земли, могут быть обнаружены. Поэтому зона обнаружения должна быть расположена таким образом, чтобы перехватить сигнал от человека, но избежать перехвата сигнала от земли, не вызвав ложного срабатывания.
Внимание должно быть обращено на то, что вертикальные границы определяются только по отношению к горизонтальной центральной линии. Глубина же конической зоны при горизонтальных границах стремится к нулю, как показано на рисунке С.2.
В идеале, радар должен быть установлен на высоте менее 1,5 м. Если это условие не выполняется, то зона обнаружения рядом с радаром может быть выше уровня, где человек будет обнаружен. Если луч радара наклоняют вниз, чтобы улучшить обнаружение рядом с радаром, то ложные сигналы могут исходить от поверхности земли.
Проверка должна проводиться на поверхности, типичной для предполагаемой производственной среды, поскольку гладкая сухая поверхность, типичная для испытательного участка, меньше отражает сигнал обратно на радар, чем влажная разбитая поверхность. Некоторые виды грунта, в частности песок, не могут вызвать нежелательные сигналы, даже если радар наклонен на него.
Радар, как правило, должен устанавливаться так, чтобы ни одна часть машины не попадала в зону обнаружения, во избежание нежелательных сигналов. Однако в некоторых радарах могут использоваться методы обнаружения, игнорирующие объекты, не перемещающиеся относительно радара. Производитель должен указать области их применения.
Приложение D (обязательное). Процедура испытаний для ультразвуковой системы обнаружения
Приложение D
(обязательное)
D.1 Введение и цель испытаний
Эти испытания предназначены для определения эффективности ультразвуковых систем обнаружения, используемых на землеройных машинах.
Критерии эффективности:
- общие критерии эффективности системы;
- критерии и границы зоны обнаружения;
- критерии расположения и установки компонентов;
- надежность операционной системы;
- вывод из активного состояния;
- время обнаружения;
- физические условия окружающей среды (вибрация, удары, температура, влажность).
Размеры, указанные на рисунках D.1-D.3, приведены для требуемой дальности 6 м. Конкретный требуемый диапазон зависит от особенностей применения машины.
Это приложение описывает требования и испытания ультразвуковых систем обнаружения для землеройных машин с рабочей скоростью![]() заднего хода до 10 км/ч.
заднего хода до 10 км/ч.
________________![]() Типичный рабочий режим колесных погрузчиков, самосвалов и т.д. при реверсировании.
Типичный рабочий режим колесных погрузчиков, самосвалов и т.д. при реверсировании.
Примечание - Требования и испытания ультразвуковых систем обнаружения для тихоходных землеройных машин (рабочая скорость заднего хода до 3 км/ч) определяются в соответствии с ISO/TR 9953.
D.2 Испытательный объект
Геометрия контролируемой зоны определяется с помощью испытательных объектов.
D.2.1 Испытательный объект Н для горизонтальных испытаний
Испытательный объект Н для горизонтального испытаний состоит из труб диаметром 75 мм и длиной 1700 мм. Он серого цвета, выполнен из жесткого пластика или металла.
D.2.2 Испытательный объект V для вертикальных испытаний
Испытательный объект V для вертикальных испытаний состоит из труб диаметром 75 мм и длиной 300 мм. Он серого цвета, выполнен из жесткого пластика или металла.
D.3 Испытательная площадка
D.3.1 Геометрия зон обнаружения
Горизонтальные и вертикальные зоны обнаружения определяются размерами, указанными на рисунке D.1 и в таблице D.1.
D.3.2 Испытательная поверхность
Испытательная поверхность должна быть ровной, плоской и прочной, ширина - не менее 5 м, длина - 8 м.
D.4 Испытательная среда
Условия, приведенные в 4.1 3, применяют со следующим дополнением:
- скорость ветра ![]() 5,4 м/с.
5,4 м/с.
D.5 Монтаж и настройка
D.5.1 Местоположение и установка датчика(ов) на машине
Датчик(и) на машине должен быть установлен и расположен таким образом, чтобы были покрыты зоны обнаружения, как указано в D.3.1.
Число датчиков зависит от ширины машины![]() и формы пучка излучения.
и формы пучка излучения.
________________![]() Опыт показывает, что для современник ультразвуковых датчиков с дальностью действия до 6 м требуется следующая компоновка: первый датчик - слева и справа на расстоянии
Опыт показывает, что для современник ультразвуковых датчиков с дальностью действия до 6 м требуется следующая компоновка: первый датчик - слева и справа на расстоянии ![]() 500 мм от контура машины. Число датчиков в зависимости от ширины машины следующее:
500 мм от контура машины. Число датчиков в зависимости от ширины машины следующее:
Ширина машины, мм | Число датчиков |
| 4 |
| 5 |
| 6 |
Датчики должны быть расположены симметрично.
Это устройство должно быть постоянно прикреплено к машине.
D.5.2 Расположение и установка оценивающего устройства
Оценивающее устройство должно быть расположено на рабочем месте оператора или в соответствующем месте на машине, чтобы предотвратить внешнее воздействие вибрационных и ударных нагрузок (см. 4.8).
D.5.3 Расположение и установка устройства для оповещения (звукового и визуального)
Устройство должно быть расположено на рабочем месте оператора и должно отвечать требованиям 4.3.2.
D.5.4 Система активации
Система должна быть в режиме постоянной готовности. Принудительное включение сигнала предупреждения должно осуществляться переключением рабочего режима.
Система должна соответствовать требованиям, указанным в п.4.5.
D.5.5 Время обнаружения
Время обнаружения должно соответствовать п.4.5. Рассчитывается среднее арифметическое результатов не менее 50 измерений. Испытательный объект (как указано в D.2) перемещается со скоростью 1 м/с извне зоны обнаружения к позиции сетки - 3 м, т.е. точке начала измерения времени.
D.5.6 Эксплуатационная надежность
D.5.6.1 Проверка системы
Процесс проверки системы должен затрагивать функции всей системы и подтверждаться коротким звуковым сигналом длительностью не более 10 мс. Проверка должна производиться автоматически после активации системы. Система должна удовлетворять требования п.4.5.
D.5.6.2 Предупреждение о неисправности
В случае неисправности оператор должен получить предупреждение.
D.5.6 3 Эксплуатационная пригодность
Система должна удовлетворять требования п.4.6.
D.5.7 Испытания
D.5.7.1 Настройка системы
Перед началом процедуры испытаний система должна быть отрегулирована.
D.5.7.1.1 Настройка диапазонов предупреждения
Если система имеет два или три диапазона предупреждения, то эти диапазоны должны быть настроены в соответствии с инструкцией изготовителя.
Пример - Системы с максимальным радиусам действия 6 м, настроенные на 2 м (аварийное предупреждение), 4 м (предупреждение) и 6 м (оповещение).
D.5.7.1.2 Настройка датчика
D.5.7.1.2.1 Регулировка высоты контролируемой зоны
Испытательный объект V для вертикальных испытаний поместить по осевой линии датчика в точку максимальной досягаемости (настроенную в соответствии с D.5.7.1.1 с допуском минус 100 мм) и перемещать испытательный объект от земли до положения, где этот объект обнаруживается (визуальный и звуковой сигналы). Обратить внимание на высоту (центральная линия испытательного объекта V) над поверхностью земли и настроить датчик так, чтобы эта высота составляла 800 мм (минус 100 мм).
D.5.7.1.2.2 Горизонтальная регулировка
Испытательный объект Н для горизонтальных испытаний поместить на половине расстояния от максимального радиуса действия (с учетом настроек, см. D.5.7.1.1), на 100 мм слева и справа за пределы зоны обнаружения (см. D.3.1).
Настроить два крайних датчика слева и справа так, чтобы испытательный объект Н был обнаружен.
Другие датчики должны быть отрегулированы перпендикулярно продольной оси машины.
D.5.7.1.3 Проверка дальности обнаружения и предупреждения
Для системы из двух или трех диапазонов предупреждения проверить правильность регулировки диапазона путем размещения испытательного объекта на расстоянии 100 мм до и после настроенного диапазона (см. Г.5.7.1.1* и рисунок D.2)
___________________
* Текст документа соответствует оригиналу. - .
Например, на двухметровом диапазоне предупреждения:
- на расстоянии отдатчика 1,9 м: аварийное предупреждение;
- на расстоянии от датчика 2,1 м: предварительное предупреждение.
D.5.7.2 Статические испытания зоны обнаружения
Это испытание должно проводиться в системе, настроенной на конкретной машине. Если испытание проводится без машины, то датчики должны быть установлены на 1,2 м над испытательной поверхностью, как указано в D.3.2, и располагаться в соответствии с D.5.1.
D.5.7.2.1 Горизонтальное испытание
Позиции испытательного объекта Н - статические, в зоне обнаружения, перпендикулярно к земле. Его продольная ось должна проходить через каждую точку измерений на координатной сетке, показанной на рисунке D.2.
D.5.7.2.2 Вертикальное испытание.
Позиции испытательного объекта V - статические, горизонтально в зоне обнаружения. Его трехмерный центр должен находиться в каждой точке измерений на координатной сетке, показанной на рисунке D.3.
D.5.7 3 Оценка результатов испытаний
В статическом положении испытательные объекты Н и V должны быть обнаружены во всех точках сетки.
Обнаружение должно быть однозначным с непрерывной последовательностью сигнала, соответствующего измеряемому расстоянию. Если объект испытаний не обнаруживается в каком-либо положении, сместите его влево - вправо (испытательный объект Н) или вверх - вниз (испытательный объект V) на ширину (диаметр) испытательного объекта.
Испытательный объект должен быть обнаружен во всех позициях.
D.6 Протокол испытаний
Протокол испытаний должен содержать следующую информацию:
а) идентификация системы | ||||
1) | производитель; | |||
2) | модель; | |||
3) | идентификация | |||
i) оценивающее устройство (обозначение и серийный номер); | ||||
ii) устройство предупреждения (обозначение и серийный номер); | ||||
iii) центр(ы) управления (обозначение и серийный номер); | ||||
б) условия испытаний | ||||
1) | испытательная поверхность; | |||
2) | погодные условия: | |||
i) скорость ветра (м/с); | ||||
ii) температура (°С); | ||||
iii) относительная влажность воздуха (%); | ||||
3) | установка и настройка: | |||
i) зона обнаружения: | ||||
I) ширина, мм; | ||||
II) высота, мм; | ||||
ii) установка радара: | ||||
I) машина; | ||||
II) вид крепления; | ||||
4) | расположение датчиков: | |||
i) расстояние от контура машины, мм; | ||||
ii) расстояние между датчиками, мм; | ||||
ii) настройки диапазонов предупреждения; | ||||
iv) аварийное предупреждение, м; | ||||
v) предварительное предупреждение, м; | ||||
vi) оповещение, м; | ||||
5) | эффективность системы: | |||
i) активация / проверка системы (см. D.5.6.1); | ||||
ii) время срабатывания (см. D.5.4); | ||||
iii) время обнаружения (см. D.5.5); | ||||
iv) контролирование сбоев (см. D.5.6.2); | ||||
v) эксплуатационная пригодность (см. D.5.6.3); | ||||
vi) условия эксплуатации (см. D.4); | ||||
в) результаты испытаний | ||||
1) | горизонтальные испытания (см. D.5.7.2.1); | |||
2) | вертикальные испытания (см. D.5.7.2.2); | |||
3) | диапазон предупреждения (см. D.5.7.1.3); |
Рисунок D.1 - Геометрия зоны обнаружения
Размеры в миллиметрах
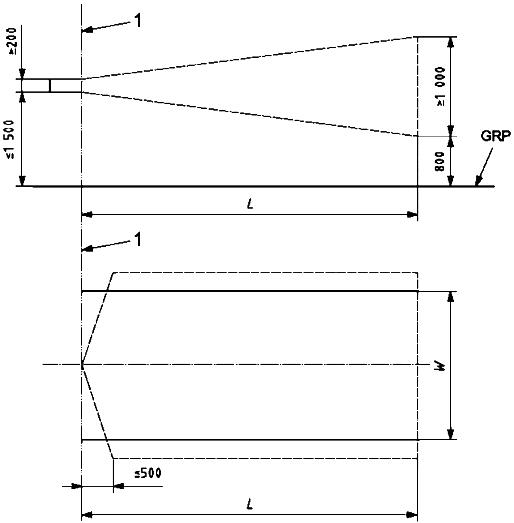
1 - линия отсчета (перед датчиком); ![]() - основная длина;
- основная длина; ![]() - основная ширина, связанная с требуемой шириной зоны обнаружения;
- основная ширина, связанная с требуемой шириной зоны обнаружения; ![]() - плоскость отсчета (земля)
- плоскость отсчета (земля)
Рисунок D.1 - Геометрия зоны обнаружения
Таблица D.1 - Размер зоны обнаружения
Максимальная рабочая скорость заднего хода |
|
|
а) |
| Как указано производителем системы |
а) Стандартная рабочая скорость заднего хода 0-10 км/ч в рабочем цикле. |
Рисунок D.2 - Горизонтальная зона обнаружения и тестирования сетки для статических испытаний
Размеры в миллиметрах
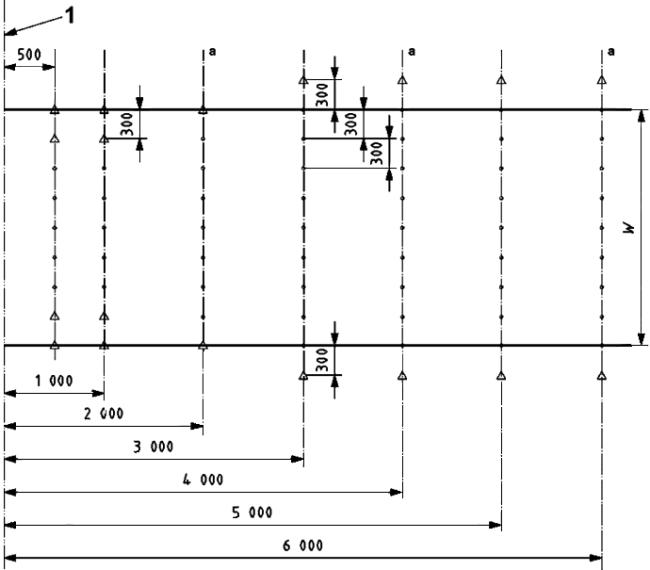
1 - линия отсчета (перед датчиком); ![]() - точки измерения с испытательным объектом
- точки измерения с испытательным объектом ![]() ;
; ![]() - дополнительные точки измерения;
- дополнительные точки измерения; ![]() - ширина, а) - см. D.5.7.1.3.
- ширина, а) - см. D.5.7.1.3.
Рисунок D.2 - Горизонтальная зона обнаружения и тестирования сетки для статических испытаний
Рисунок D.3 - Вертикальная испытательная сетка для статических испытаний
Размеры в миллиметрах
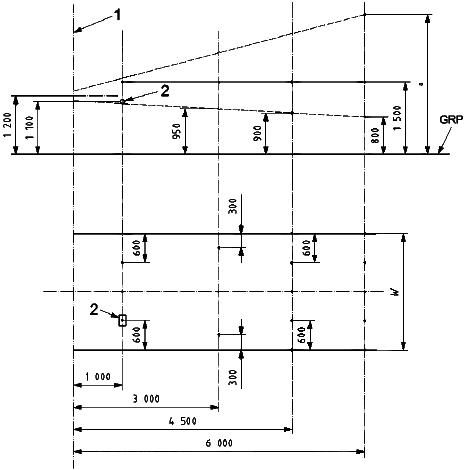
Примечание - Если используются системы с несколькими предупреждающими диапазонами, то измерения проводят на расстоянии 100 мм перед и/или после каждого предупредительного диапазона.
1 - линия отсчета (перед датчиком); 2 - объект испытаний; · - точка измерений; ![]() - плоскость отсчета (земля);
- плоскость отсчета (земля); ![]() - ширина; а) - максимум;
- ширина; а) - максимум;
Рисунок D.3 - Вертикальная испытательная сетка для статических испытаний
Приложение Е (обязательное). Процедура испытаний для ультразвуковой приемопередающей системы
Приложение Е
(обязательное)
Е.1 Введение и цель
Ультразвуковая приемопередающая система - это система, обнаруживающая рабочего с помощью двусторонней ультразвуковой связи между устройством обнаружения, установленным на машине, и ультразвуковым маячком, надетым на рабочего.
Настоящее приложение предусматривает метод испытания для проверки зоны обнаружения, необходимой для предотвращения случайного контакта между машиной и рабочим, а также для подтверждения, что работник, входящий в зону обнаружения, будет обязательно обнаружен.
Е.2 Испытательный объект
Испытательным объектом должно быть передающее устройство (маячок), надетое на манекен, который представляет 50-й процентиль размера человека (рисунок Е.1). Передающие устройства должны подходить к каске, жилету или любому другому снаряжению, которое может носить строительный рабочий.
Е.3 Условия испытаний
Е.3.1 Испытательная площадка
Испытательная площадка должна иметь ровную поверхность, ее ширина и длина - не менее 20 м.
Е.3.2 Условия испытаний
Должны быть следующими:
а) температура - в соответствии с 4.1.3;
б) относительная влажность воздуха - в соответствии с 4.1.3;
в) скорость ветра - не более 10 м/с.
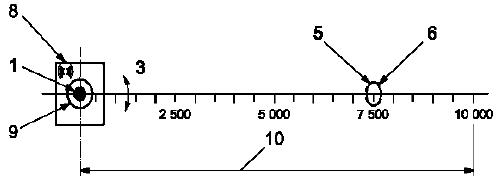
Рисунок Е.1 - Измерение зоны обнаружения
Размеры в миллиметрах
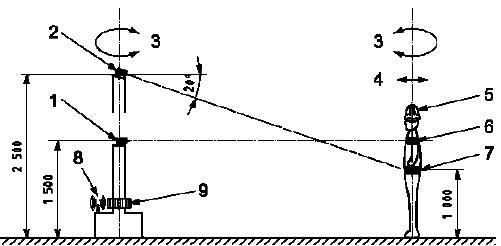
а - вид сбоку
б - вид сверху
1 - начальный преобразователь; 2 - второй преобразователь; 3 - направление вращения; 4 - направление движения; 5 - манекен; 6 - первый маячок; 7 - второй маячок; 8 - излучатель аварийного сигнала; 9 - вращающееся основание; 10 - зона обнаружения
Рисунок Е.1 - Измерение зоны обнаружения
Е.3.3 Установка преобразователя
Е.3.3.1 Высота и угол
Горизонтальное положение маячка и отклонения по вертикали показаны на рисунке Е.1.
Е.3.3.1.1 Установка в горизонтальном положении
Преобразователь и маячок должны быть установлены на расстоянии 1,5 м над землей. В этом положении преобразователь должен вращаться. Должен быть измерен найденный угол поворота по часовой и против часовой стрелки.
Е.3.3.1.2 Установка с вертикальным отклонением положений
Преобразователь устанавливается в 2,5 м над землей. Маячок должен быть установлен на 1 м над землей и под углом около 20° ниже относительно преобразователя. Должен быть измерен найденный угол поворота по часовой и против часовой стрелки.
Е.3.3.1.3 Расстояние между преобразователем и маячком
Расстояние ![]() между преобразователем и маячком должно быть 0,5; 1; 2,5; 5; 7,5 и 10 м.
между преобразователем и маячком должно быть 0,5; 1; 2,5; 5; 7,5 и 10 м.
Е.3.3.1.4 Измерение горизонтальной и вертикальной диаграмм направленности
Измерение горизонтальной диаграммы направленности должно проводиться с преобразователем, установленным, как показано на рисунке Е.2, а.
Измерение вертикальной диаграммы направленности должно проводится с преобразователем, установленным, как показано на рисунке Е.2, б.
Е.3.* Проверка обнаружения
________________
* Нумерация соответствует оригиналу. - .
Способность преобразователя обнаруживать маячок в измеряемом диапазоне должна подтверждаться визуальным и/или звуковым сигналом, входящим в эту систему.
Рисунок Е.2 - Измерение горизонтальной и вертикальной направленности
а - для горизонтальной направленности
б - для вертикальной направленности
1 - направление вращения; 2 - преобразователь; 3 - вращающееся основание
Рисунок Е.2 - Измерение горизонтальной и вертикальной направленности
Е.3.5 Критерии
Полученный диапазон обнаружения должен быть выражен как показано на:
- рисунке Е.3 (например, 60°) для овального типа преобразователей;
- рисунке Е.4 (например, 30°![]() 60°) для эллипсного типа преобразователей.
60°) для эллипсного типа преобразователей.
Е.3.5.1 Дальность зоны обнаружения
При установке в горизонтальном положении разница между максимальной дальностью распространения излучения преобразователя и максимальной дальностью, на которой маячок действительно отвечает, должна быть не более ±10%.
Е.3.5.2 Ширина зоны обнаружения
При установке в горизонтальном положении разница между номинальной шириной зоны излучения преобразователя и шириной, на которой маячок начинает отвечать, должна быть не более +20% и не менее минус 10%.
При установке с вертикальным отклонением положений разница между номинальной шириной зоны излучения преобразователя и шириной, на которой маячок начинает отвечать, должна быть не более ±20%.
Рисунок Е.3 - Измерение горизонтальной и вертикальной направленности (60°, овальный тип преобразователей)
Дальность обнаружения в зависимости от угла наклона
Дальность, м | 0,5 | 1 | 2,5 | 5 | 7,5 | 10 |
Угол, градусы | 180 | 180 | 130 | 100 | 75 | 60 |
а - диаграмма горизонтальной направленности
Дальность обнаружения в зависимости от угла наклона
Дальность, м | 0,5 | 1 | 2,5 | 5 | 7,5 | 10 |
Угол, градусы | 180 | 180 | 130 | 100 | 75 | 60 |
б - диаграмма вертикальной направленности
1 - преобразователь; a - дальность
Рисунок Е.3 - Измерение горизонтальной и вертикальной направленности (60°, овальный тип преобразователей)
Рисунок Е.4 - Измерение горизонтальной и вертикальной направленности (30°х60°, эллипсный тип преобразователей)
Дальность обнаружения в зависимости от угла наклона
Дальность, м | 0,5 | 1 | 2,5 | 5 | 7,5 | 10 |
Угол, градусы | 180 | 180 | 120 | 80 | 50 | 30 |
a - диаграмма горизонтальной направленности
Дальность обнаружения в зависимости от угла наклона
Дальность, м | 0,5 | 1 | 2,5 | 5 | 7,5 | 10 |
Угол, градусы | 180 | 180 | 130 | 100 | 75 | 60 |
б - диаграмма вертикальной направленности
1 - преобразователь; а - дальность
Рисунок Е.4 - Измерение горизонтальной и вертикальной направленности (30°![]() 60°, эллипсный тип преобразователей)
60°, эллипсный тип преобразователей)
Е.4 Дополнительные испытания
Е.4.1 Направленность маячка
Так как число и расположение датчиков на каске или жилете ограниченно, возможность опознавания различна для разных поз манекена. Чтобы выявить разницу, должна быть проверена направленная чувствительность.
Е.4.1.1 Метод испытания
В горизонтальном положении маячок должен быть установлен на расстоянии 5 м от преобразователя.
Нужно вращать маячок от 0 до 360 ° и проверить, существуют ли угловые зоны нереагирования.
Е.4.1.2 Критерии
Не должно быть угловых зон нереагирования.
Е.4.2 Звуковой сигнал
Чтобы удостовериться, что тревожный сигнал является достаточно громким для оператора и рабочих, нужно измерить уровень его звука.
Е.4.2.1 Метод испытания сигнализации в кабине оператора и критерии
Уровень звукового давления должен быть измерен в точке органа слуха оператора. Микрофон должен быть расположен в соответствии с ISO 6394. Уровень звукового давления тревожного сигнала для машин с низким шумом холостого хода двигателя должен быть равен уровню звукового давления шума двигателя на высоких холостых оборотах или превышать его.
Е.4.2 2 Тревожный сигнал маячка
Должны быть приняты меры, чтобы обеспечить для рабочих достаточное звуковое давление сигнала. Например, сигнальное устройство должно быть размещено около уха, чтобы рабочий мог услышать тревожный сигнал.
Е.4.3 Стойкость к внешним воз действиям
Стойкость к внешним условиям должна отвечать требованиям настоящего стандарта. Если стойкость не указана конкретно, то нужно следовать требованиям основного стандарта.
Е.5 Отчет об испытаниях
Протокол испытаний должен содержать следующую информацию:
а) производитель/модель; | ||
б) испытательный объект; | ||
в) условия испытаний: | ||
1) | испытательная зона | |
2) | условия испытаний: | |
i) температура; | ||
ii) относительная влажность воздуха; | ||
iii) скорость ветра. |
Е.6 Результаты испытаний
Е.6.1 Форма зоны обнаружения
Форма зоны обнаружения должна быть зарегистрирована в виде диаграммы или рисунка измеренной зоны, обеспечивающих трехмерные данные (см. рисунки Е.3 и Е.4).
Е.6.2 Дополнительные испытания
Е.6.2.1 Направленность маячка
Проверьте и зарегистрируйте позиции испытательного объекта, в которых маячок не реагирует.
Е.6.2.2 Звуковой сигнал
Зарегистрируйте уровень звукового давления в точке органов слуха оператора от работы двигателя на высоких холостых оборотах, на низких холостых оборотах и от тревожного сигнала.
Е.6.2.3 Стойкость к внешним воздействиям
Ссылаясь на 4.8, регистрируйте, что не наблюдались сбои при:
- температурном испытании;
- испытании на влажность;
- ударном испытании.
Приложение F (справочное). Процедура испытаний для приемопередающих систем электромагнитного (ЕМ) сигнала
Приложение F
(справочное)
F.1 Введение и цель
Приемопередающая система электромагнитного (ЕМ) сигнала (включая двустороннее радио) - это система, которая обнаруживает рабочего или какое-либо препятствие с помощью электромагнитного сигнала. Система действует посредством связи между установленным на машине приемопередатчиком и электромагнитным маячком, надетым на рабочего.
Настоящее приложение обеспечивает испытания с целью определения зоны обнаружения для приемопередающих систем электромагнитного (ЕМ) сигнала. Системы используют для обнаружения рабочих и каких-либо препятствий, которые снабжены электромагнитным маячком.
Процедура определяет геометрию двумерной зоны, в пределах которой обнаружен маячок. Процедура не рассматривает изменения, происходящие в зоне обнаружения от помех или других воздействий, когда приемопередающее устройство устанавливается на машину. См. п.Е.10 для аспектов, которые следует учитывать при установке таких систем на реальные машины.
Различие между основными типами приемопередающих систем электромагнитного (ЕМ) сигнала:
- тип 1: передатчик и антенна, установленные на машинах, создают электромагнитное поле. Маячок обнаруживает это поле и передает сигнал обратно или к обособленной антенне связи, или к той же антенне, генерирующей сигнал обнаружения. Если маячок находится в пределах указанного диапазона обнаружения, то на машинах для предупреждения оператора подается тревожный сигнал. Некоторые другие системы также подают тревожный сигнал на маячок;
- тип 2: маячок излучает электромагнитное поле вокруг рабочего или объекта, на котором он установлен. Приемник и антенна, установленные на машине, обнаруживают сигнал маячка и подают тревожный сигнал для оператора, если маячок находится в пределах определенного диапазона. Факультативно отдельный сигнал может быть передан обратно на маячок, если он может издавать тревожный сигнал.
F.2 Испытательный объект
Испытательный объект должен быть изготовлен в виде штатива из дерева (или другого материала, не влияющего на ЕМ сигнал), позволяющего устанавливать маячки по крайней мере в трех направлениях на высоте 1 м от земли так, чтобы его части не выступали выше 1 м (рисунок F.1).
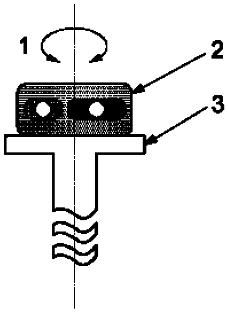
Рисунок F.1 - Внешний вид испытательного объекта с тремя ориентировками маячка
Размеры в миллиметрах
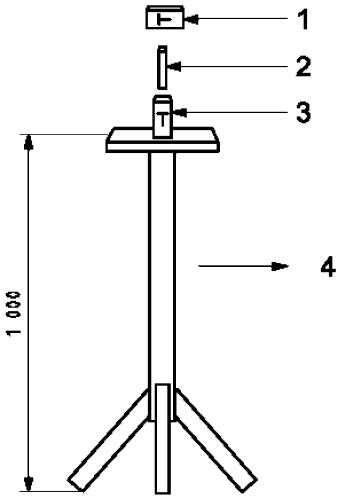
1 - ориентировка 3 - на боку; 2 - ориентировка 2 - повернутая на 90°; 3 - ориентировка 1 - стандартная; 4 - направление на антенну, установленную на машине
Рисунок F.1 - Внешний вид испытательного объекта с тремя ориентировками маячка
F.3 Испытательная площадка
Испытательная площадка должна находиться на открытом воздухе в открытой местности, без препятствий, влияющих на ЕМ сигнал (здания, транспортные средства и другие объекты) в радиусе 60 м от центра. Следует разметить координатную сетку в полярной системе координат, отмечая радиальными линиями каждые 10°, а концентрическими окружностями - каждый метр. Полный радиус сетки должен быть того же размера, что и ожидаемая дальность обнаружения системы (рисунок F.2).
Рисунок F.2 - Пример сетки для испытательной площадки и координатно-масштабной бумаги
Значения в градусах
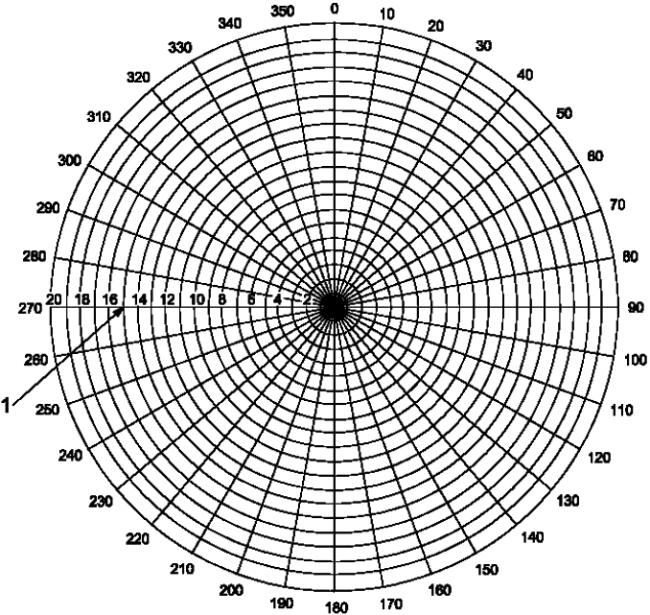
1 - удаленность (в метрах) испытательного объекта
Рисунок F.2 - Пример сетки для испытательной площадки и координатно-масштабной бумаги
F.4 Условия испытаний
Условия испытаний должны соответствовать требованиям 4.1.3.
F.5 Установка составных частей системы, предназначенных для машины
F.5.1 Система типа 1
Составные части системы, которые передают сигнал для зоны обнаружения, т.е. те элементы, которые обычно устанавливаются на землеройных машинах, должны быть помещены в центр испытательной площадки. Передающая антенна должна быть установлена на деревянной подставке, (или сделанной из другого материала, не влияющего на ЕМ сигналы) на высоте 2 м. Ориентация - та же, что стандартно делается на машинах. Конструкция должна оставаться неподвижной. Отдельная антенна, используемая для связи с маячками, должна быть установлена на высоте 1 м непосредственно под передающей антенной. Сигнальная часть системы должна быть расположена так, чтобы издаваемый сигнал был легко заметен и слышен во время испытаний (рисунок F.3).
F.5.2 Система типа 2
Составные части системы, которые получают сигналы обнаружения от маячков, т.е. элементы, обычно устанавливаемые на землеройных машинах, должны быть помещены в центр испытательной площадки. Принимающая антенна должна быть установлена на подставке на высоте 2 м с ориентацией, стандартной для машин. Конструкция должна оставаться неподвижной.
Отдельная антенна, используемая для связи с маячками, должна быть установлена на высоте 1 м непосредственно под принимающей антенной. Сигнальная часть системы должна быть расположена так, чтобы издаваемый сигнал был легко заметен и слышен во время испытаний.
Рисунок F.3 - Пример стенда с составными частями, предназначенными для машины
Размеры в миллиметрах
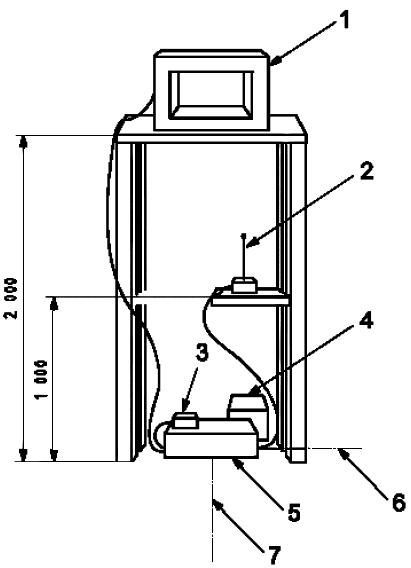
1 - приемник или передатчик, обычно монтируемый на машине; 2 - дополнительная антенна для связи с маячком; 3 - сигнальное устройство; 4 - источника питания; 5 - электронный блок управления; 6 - радиальная линия (270°); 7 - радиальная линия (0°)
Рисунок F.3 - Пример стенда с составными частями, предназначенными для машины
F.6 Установка маячков
Маячок или элемент, обычно надетый на работника или установленный на другом препятствии, должен быть размещен на плоскости испытательного объекта с ориентировкой, которая ожидается в рабочих ситуациях. Например, маячок, который носят на поясе, должен быть установлен на подставке в вертикальном положении подобно ориентировке, которую он имел бы на поясе человека, стоящего лицом к стенду с машинными компонентами (см. ориентировка 1 на рисунке F.1).
Внутренние маячки каски должны оставаться в ней, каска должна быть размещена на плоскости испытательного объекта с такой же ориентировкой, как на человеке, стоящем вертикально лицом к стенду с машинными компонентами системы.
Помимо вышеупомянутой ориентировки маячка должны быть проверены две дополнительные ориентировки в других ортогональных плоскостях. Цель - моделирование ситуаций: человек повернут на 90° относительно первого испытания; человек нагнулся или лежит лицом к машине.
F.7 Процедура испытаний
F.7.1 Регулировки системы
Если диапазон системы является регулируемым, т.е. диапазон, в котором обнаруживаются маячки, может быть настроен в соответствии с размерами оборудования или скорости, то нужно проводить два комплекта испытаний. См. F.7.2: один - с диапазоном, установленным на минимум, другой - с диапазоном, установленным на максимум, рекомендуемый производителем.
F.7.2 Измерение зоны обнаружения
Устанавливают машинные компоненты системы в центре испытательной площадки в соответствии с требованиями F.3. Помещают испытательный объект с маячками на окружности радиусом 1 м в точку 0° радиальной линии. Регистрируют, происходит ли обнаружение. Поворачивают маячок во вторую и третью позиции, как описано в F.6, регистрируя обнаружение в каждом случае. Чтобы не оказывать влияние на процесс обнаружения, лицо, производящее испытание, должно в это время быть вне зоны.
Передвигают испытательный объект от центра к следующему кругу вдоль радиальной линии (0°) и повторяют действия, описанные выше. Продолжают перемещать испытательный объект вдоль радиальной линии до тех пор, пока не перестанет происходить обнаружение при любой ориентировке маячка.
Переходят на следующую радиальную линию и повторяют испытания. Испытательный объект и маячок должны быть ориентированы на стенд с машинными компонентами системы, как описано в F.6. Для корректировки положения при движении по кругу нужно поворачивать испытательный объект. Продолжают, пока обнаружение не будет зарегистрировано для всех радиальных линий и расстояний от центра.
F.8 Регистрация зоны обнаружения
Для указания размеров и формы зоны обнаружения каждая контрольная точка, указанная в F.7.2, должна быть зарегистрирована на координатной сетке, как показано на рисунке F.4. Достоверное обнаружение следует отмечать для точек, где при всех трех ориентировках маячок обнаружен системой.
Спорадическое обнаружение следует отмечать для тех точек, где маячок был обнаружен только при одной или двух ориентировках. Кроме того, обнаружение считается спорадическим в тех точках, где любая ориентировка маячка заканчивается непостоянным обнаружением.
Зона обнаружения должна быть очерчена, чтобы указать полную форму достоверной зоны обнаружения с установленными спорадическими областями.
Рисунок F.4 - Пример схемы достоверной и спорадической зон обнаружения
Значения в градусах
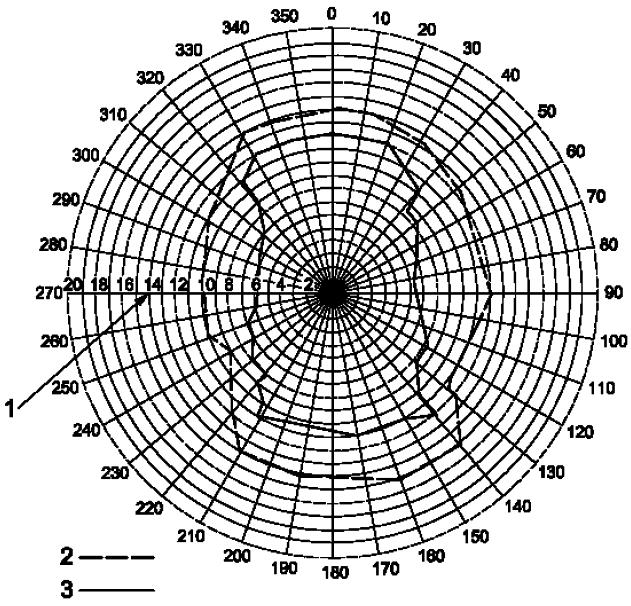
1 - удаленность (в метрах) испытательного объекта; 2 - спорадическая зона обнаружения; 3 - достоверная зона обнаружения
Рисунок F.4 - Пример схемы достоверной и спорадической зон обнаружения
F.9 Проверочные испытания маячка на человеке
Экранирование маячка организмом человеком может быть причиной помех и перебоев при обнаружении. Должны проводиться дополнительные испытания, чтобы подтвердить, что маячок, предлагаемый для ношения рабочим, обнаруживается при всех ориентировках. Маячки должны быть предназначены для ношения человеком средних размеров (рост от 1,65-1,75 м) при типичной ориентировке и местоположении в соответствии с рекомендациями производителя.
Испытатель должен стоять прямо лицом к машинным компонентам системы, установленным на стенде, как описано F.5. Испытуемый человек должен стоять в точке пересечении 180° радиальной линии и окружности радиусом 8 м. Для этой ориентировки обнаружение маячка должно быть зарегистрировано как "Да" или "Нет".
Затем испытатель поворачивается на месте с шагом 45°, регистрируя обнаружение маячка для каждой ориентировки. Результаты должны быть зарегистрированы, как показано в таблице F.1.
Таблица F.1 - Запись регистрации обнаружения маячка на человеке в диапазоне 8 м
Ориентировка человека, градусы | Обнаружение маячка, |
0 | |
45 | |
90 | |
135 | |
180 | |
225 | |
270 | |
315 |
F.10 Практический анализ установки приемопередающих систем (ЕМ) на машинах
Зона обнаружения для этих систем при регистрации, как описано выше, может очень отличаться от зоны обнаружения после установки системы на машине. Металлические конструкции машины могут блокировать часть сигналов, в результате зона обнаружения урезается в одном или более направлениям. Высота установки и местоположение также могут повлиять на форму зоны обнаружения.
Некоторые производители используют это качество ЭМ* сигналов для ограничения обнаружения только одной рабочей зоной. Например, антенны, установленные на задней поперечной балке самосвала, могут обнаруживать маячки только в задней части самосвала, и наоборот, если антенна установлена на переднем бампере.
___________________
* Текст документа соответствует оригиналу. - .
Производители должны ясно указать эти ограничения в руководстве по установке или эксплуатации, чтобы было понятно: для этой части машин могут быть необходимы несколько антенн для обеспечения полной безопасности. Производителям рекомендуется приводить в руководстве пример схемы зоны обнаружения при установке на типовые машины.
F.11 Приемочные испытания типов машин
Из-за возможной способности металлических конструкций машины блокировать часть сигналов (см. F.10) проведение испытаний, основанных на методе, описанном в F.7, осуществляется на каждой машине, чтобы определить границы обнаружения системы, установленной на компьютере.
Результаты должны быть перерегистрированы в соответствии с F.8, схема сопоставлена с данными, полученными в ходе первоначального испытания составных частей системы. Там, где есть значительное урезание зоны распространения сигнала, должна использоваться оценка риска, чтобы определить необходимость дополнительных антенн для дополнительной защиты в отсеченной области.
Библиография
ISО 3411 | Еarth-moving machinery - Physiсal dimensions of operators and minimum operator space envelope (Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора) |
ISO 5006 | Earth-moving machinery - Operator's field of view - Test method and performance criteria (Машины землеройные. Обзорность с рабочего места оператора. Метод испытания и критерии эффективности) |
ISO/ТR 9953 | Earth-moving machinery - Warning devices for slow-moving machines - Ultrasonic and other systems (Машины землеройные. Сигнальные предупредительные устройства для низкоскоростных машин. Ультразвуковые и другие системы) |
ISO 14401 | Earth-moving machinery - Field of vision of surveillance and rear-view mirrors (Землеройные машины. Поле зрения для наблюдения и зеркала заднего вида. Критерий качества) |
EN 50132-7:1996 | Alarm systems - CCTV surveillance systems for use in security applications - Application guidelines (Системы аварийной сигнализации. Системы видеонаблюдения CCTV для применения в целях безопасности. Часть 7. Правила использования) |
NIOSH RI 9652 | Test Rеsults of Collision Warning Systems for Surface Mining Dump Trucks (Результаты испытаний системы предупреждения опасности столкновения карьерных самосвалов) |
NIOSH RI 9654 | Test Results of Collision Warning Systems on Off-Highway Dump Trucks: Phase II (Результаты испытаний системы предупреждения опасности столкновения внедорожных самосвалов) |
NIOSH RI 9657 | Recommendations for Testing Radar-Based Collision Warning Systems on Heavy Equipment (Рекомендации для радарных систем предупреждения об опасности столкновения с тяжелым оборудованием) |
Приложение ДА (справочное). Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Приложение ДА
(справочное)
Таблица ДА.1
Обозначение и наименование ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 6165 Машины землеройные. Классификация Термины и определения | - | * |
ISO 6394 Машины землеройные. Измерение уровня звукового давления на рабочем месте оператора. Постоянный режим испытаний | MOD | ГОСТ 27534-87 Акустика. Измерение воздушного шума, создаваемого землеройными машинами на рабочем месте оператора. Испытания в стационарном режиме |
ISO 9533 Машины землеройные. Установленные на машине звуковые устройства тревожной сигнализации при перемещении и передние сигнальные устройства. Метод испытаний и критерии эффективности | MOD | ГОСТ 29292-92 Машины землеройные. Бортовые звуковые сигнализаторы переднего и заднего хода. Методы акустических испытаний |
ISO 13766 Машины землеройные. Электромагнитная совместимость | - | * |
ISO 15998 Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. |
____________________________________________________________________________________
УДК 621.869.4-788:629.614.006.354 МКС 53.100 IDT
Ключевые слова: система обнаружения опасности HDS, воспринимающее устройство для оповещения, устройство для оценки, визуальное средство VA, зона обнаружения
____________________________________________________________________________________
Электронный текст документа
и сверен по:
официальное издание
М.: Стандартинформ, 2014
{kind=link}