Цена 3 коп.

ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
МАШИНЫ ЗЕМЛЕРОЙНЫЕ
МЕТОД ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ
ГОСТ 27248-87
(ИСО 5005-77)
Издание официальное
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ Моска*

УДК 621.вГвГвГ».001.4:006.35 4
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
Группа Г45
■МАШИНЫ ЗЕМЛЕРОЙНЫЕ
Метод определения положения центра тяжести
.Earth-moving: machinery. Method for locating the centre of gravity
■ОКГ1 43 1000
ГОСТ 2 724 8-87
|ИСО SOOS—77]
Срои действия с 04.01.88 до 04.01,93
0. ВВЕДЕНИЕ
Настоящий стандарт устанавливает метол определения положения центра тяжести землеройных машин, основанного из использовании весов и крана.
У машины с рабочим оборудованием или элементами» которые могут перемещаться, центр тяжести не имеет постоянного положения. При наклоне такой машины (с целью определения вертикальных координат) упругие элементы деформируются, жидкости и незакрепленные детали перемещаются к, следовательно, меняется положение центра тяжести. Кроме того, положение центра тяжести землеройных машин зависит от вида и расположения рабочего или вспомогательного оборудования. Поэтому во всех случаях важно точно указывать условия проведения испытаний.
1. НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЙ
Настоящий стандарт устанавливает метод определения координат центра тяжести землеройных машин (тракторов, погрузчиков, демлевозов л автогрейдеров) при любых условиях нагружения и расположения рабочего оборудования.
2. ГЕРМИНЫ И ОПРЕДЕЛЕНИЯ
В настоящем стандарте применяются следующие термины и определения:
2.L Машина — машина или другой объект, для которого должен быть определен центр тяжести.
Издание официальное Перепечатке воспрещен*
© Издательство стандартов, 1987
-2 Тч;
С. 2 ГОСТ 2X24 8—87 (ИСО 5005—77)
2.2. Приборы — оборудование, необходимое для определения положения центра тяжести машины.
2.3. Рабочее оборудование — оборудование,, монтируемое па машине с определенными целями (например, отвал бульдозера, лебедка или ковш).
2.4. «Левая» и «правая» стороны — определяются относительно преимущественного направления движения машины.
2.5. Масса — масса машины, представленной на испытание.
3. ПОДГОТОВКА И ИСПЫТАНИЮ И ЗАГРУЗКА МАШИНЫ
Перед испытанием машина должна быть чистой и испытываться в рабочем состоянии или в состоянии, согласованном между изготовителем и комиссией, проводящей испытания.
3.1. Радиатор, масляный бак, гидравлические и другие емкости должны быть заполнены до установленных рабочих уровней; топливный бак должен быть либо полностью заправленным, либо порожним, либо заполненным до установленного уровня, согласованного между изготовителем и комиссией, проводящей испытания.
3.2. Машина должна быть полностью укомплектована инструментом, запасным колесом, деталями и оборудованием в соответствии с условиями нормальной поставки.
3.3. Давление в шинах должно соответствовать требованиям инструкции по эксплуатации или, если дается диапазон давлений, наивысшему из указанных значений. Если машины оборудо-ванпы балластируемыми шинами, последние должны быть заполнены в соответствии с требованиями инструкции ио эксплуатации.
3 4 Рабочее оборудование должно, как правило, находиться в рабочем положении, например:
а) для гусеничных ила колесных тракторов с бульдозерным оборудованием—отвал должен быть установлен в нижнее положение без перекоса, с минимальным просветом от горизонтальной плоскости отсчета (см. п. 5.3);
б) для погрузчиков — ковш должен быть полностью запрокинут назад, а нижняя часть рычажной системы или ковш должны располагаться с минимальным просветом от горизонтальной плоскости отсчета;
в) для автогрейдеров — нож отвала должен располагаться горизонтально и перпендикулярно горизонтальной оси машины на расстоянии 20 см от горизонтальной плоскости отсчета. Передние колеса должны быть установлены в вертикальном положении.
Допускается определять положение центра тяжести данным методом при различных положениях рабочего оборудования; координаты для этих положений должны быть отражены в отчете (п. 64).
ГОСТ 2TJX8—«7 (ИСО 5005—7») С 3
3.5. Шарнирно сочлененные машины должны испытываться при ■блокировке рами в положении, соответствующем прямолинейному движению, однако допускается проводить испытании при максимальном или любом промежуточном значении угла складывания.
3.6. Планшет для нанесения отметок должен иметь жесткую конструкцию высотой не менее 600 мм и шириной 450 мм. Планшет должен быть укреплен на машине в удобном месте; гладкая поверхность планшета должна занимать вертикальное и параллельное боковой плоскости машины положение (см. п. 6).
4. МЕТОД ОПРЕДЕЛЕНИЯ
4.1. Общие положения
Центр тяжести определяют методам, основанным на подъеме машины и определении опорных реакций. Данный метод включает измерение опорных реакций машины, вначале на горизонтальной поверхности, затем при наклоне в продольном направлении. В каждом случае определяют расчетное горизонтальное расстояние центра тяжести от точки контакта с опорной поверхностью; вертикальные линии наносят на планшет, укрепленный на машине Пересечение вертикалей (образует треугольник). За точное положение этого треугольника принимают точку пересечения медиан.
4.2. Л р и б о р ы
4.2.1, Весы с погрешностью измерений 20 кг.
4.2.2. Кран.
4.2.3. Платформа.
4.2.4. Призматические опоры (обычно используется стальной уголок).
4.2.5. Уровень, отвес, угольник.
4.2.6. Планшет для нанесения отметок.
4.2.7. Материалы для нанесения отметок.
4 2.8. Рулетка.
4 3 Проведение испытаний.
Горизонтальная продольная координата, поперечная координата в горизонтальной плоскости и вертикальная координата центра тяжести должны определяться в соответствии с требованиями пп. 4.3.1—4.3.3.
4.3.1. Горизонтальная продольная координата х.
4.3.1.1. Гусеничные машины (см. черт. 1).
Измерить массу М всей машины на весах.
Измерить реакцию г под призматической опорой от массы призматической опоры и части платформы.
Продвинуть машину на платформу, поддерживаемую весами, и измерить R+r.
2*
С. 4 ГОСТ 27148—87 |МСО SO0S—77)
Измерить расстояние Р между призматическим и опорами.
Рассчитать R путем вычитания.
Тогда х -
Используй расчетное значение г, провести на планшете, укрепленном на машине, перпендикуляр, проходящий через центр тяжести. Затем нанести координату х на соответствующую плоскость отсчета по п. 5.
4.3.1.2. Колесные машины.
При испытаниях колесных машин нет необходимости использовать платформу или призматические опоры.
При _отключенных тормозах измерять нагрузки на оси и рассчитать .г на соответствующую плоскость отсчета по п. 5.
4.3.2. Поперечная координата в горизонтальной плоскости у (см. черт. 2),
Измерить нагрузки на левые Rt м правые R2 колеса нлн гусе-ниты.
Рассчитать смещение центра тяжести, используя значение колен гусениц или колес в качестве плеча пары сил:
< ммся) ~ лг ’
Колея .
Примечание. Обычно сумма нагрузок на правую и левую стороны не равняется в точности массе машины, ввиду некоторого несовпадения уровней) площадки весов и <«ру:«зх>шс|1 поверхичеуи. Ошибка сноджтся к минимуму, если при определении нагрузки машину устанавливать строго на одно и то же место платформы.
Общую массу машины «Ч предпачтателию определять как сумму магруаос нз правую и левую стороны колесной (гусеничной) машины
Затем нанести координату у на соответствующую плоскость отсчета по п. 5. __
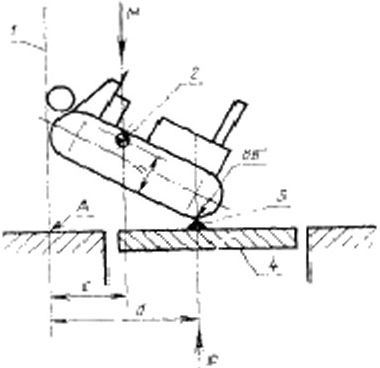
4.3.3. Вертикальная координата центра тяжести h (см. черт. 3).
4.3-31. Приподнять машину за один коней на угол 15—25° от горизонтальной плоскости, установив другой конец машины на весы. Следует выбирать максимальный удобный угол. Данной метод применим как для колесных, так и для гусеничных машин, основное различие состоит в определении точного положения точки возникновения опорной реакции, то есть точки контакта с опорной поверхностью. Для колесных машин, тормоза которых должны быть отключены, эта точка является проекцией осн. На
ГОСТ 2 724»—«7 |ИСО 5005—77} С. 5
гусеничных машинах необходима маневрировать до тех лор. пока опорные грунтозацепы с обеих сторон машины не будут располагаться на липни RB', или обеспечить контакт с опорной поверхностью через промежуточную опору из стального уголка, установленную на линии ВВ'. Во всех случаях трос, используемый для подъема машины, должен занимать вертикальное положение в обеих плоскостях, проверяемое отвесом. Это является важным условием для обеспечения равенства нулю опорных реакции в го-ризонтальной плоскости.
4 3.3.2. Измерить при помощи весов опорную реакцию/? в точке контакта с опорной поверхностью.
4.3.3.3. Измерить горизонтальное расстояние d от тючки контакта с опорной поверхностью до линии подъема.
4.3.3.4. Рассчитать горизонтальное расстояние с от центра тя-жести до линии подъема по формуле ^=—.
4.3.3.5. Провести вертикальную линию через центр тяжести на планшете, укрепленном на машине.
Повторить вышеописанные действия с машиной, приподнятой за другой конец (не обязательно соблюдать тот же угол наклона)..
Определив по пересеченню__вертикалей_на планшете высоту расположения центра тяжести /t, нанести Л на соответствующую плоскость отсчета по п. 5.
Примечание Для установки машины на весы допускается въ-езжап. на яих еяо«и ходом под прямым углом, размсгии платформу меловыми линиями, которые используют как вспомогательные при вычерчивании плана.
Если грунтозацепы гусеничной машины нс совпадают с линией ВВ' (см черт. 3|, необходимо повторять маневрирование до получения желаемого результата,
S. ПЛОСКОСТИ ОТСЧЕТА
Допускается принимать следующие плоскости отсчета:
5.1. Вертикальная плоскость I:
для гусеничного трактора проходит через ось ведущего колеса;
для колесного или гусеничного погрузчиков — через переднюю ось центра направляющих колес гусенка, поскольку эти точки используются при конструировании.
5.2. Вертикальная плоскость 2: проходит через главную продольную ось машины, то есть посредине между колесами (или гусеницами).
5.3. Горизонтальная плоскость: проходит на уровне опорной поверхности. Опорная поверхность должна быть твердой, то есть должно быть исключено погружение грунтозацепов, гусеничной машины.
С 6 ГОСТ 27248—47 (ИСО $005—77|
6. ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ
6.1. В отчете должны быть приведены координаты центра тяжести:
к — горизонтальная продольная координата, являющаяся расстоянием от центра тяжести до вертикальной плоскости 1;
у — поперечная координата или отклонение центра тяжести от вертикальной плоскости 2: положительная — при отклонении вправо, отрицательная— при отклонении влево;
h—вертикальная координата или высота центра тяжести нал горизонтальной опорной поверхностью.
6.2. Положение центра тяжести относительно трек плоскостей отсчета должно быть зарегистрировано в отсчете с точностью до Ю мм. Если имеются плоскости отсчета, кроме упомянутых в п. 5. они должны быть указаны в отчете.
6.3. Все сведения., относящиеся к положению центра тяжести машины, должны быть отражены в отчете. Должно быть подробно описано положение рабочего оборудования и состояние по загрузке.
6.4. Рекомендуемая форма отчета:
Изготовитель .......
Тип машины . ... .....
Серийный номер ... ЛЬ шасси . . , -Рабочее оборудование ......
Деление в передних шинах ....
Давление в задних шинах .....
Дата проведения испытаний ....
Модель.....
№ донга теля . .
кПа кПа
Масса машины Я кг: Без груза ... мт | С грузом ......кг |
С .тезой стороны | |
С зразой стороны | |
Общая |
Координаты центра тяжести, ми
Положение рабочего оборудования х ±у ft | * ±у А |
ГОСТ 2714»- 87 |ИСО 5005-77) С. 7
Определение продольной координаты х
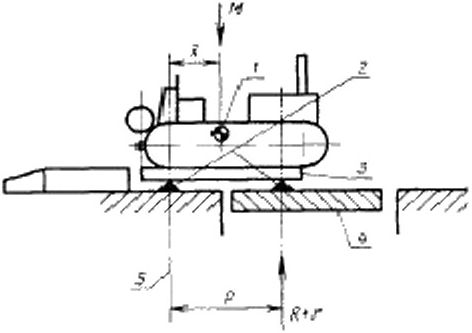
/—центр тяжести; ?-призматические опори: 3- плотфор-мл. «—весы; б—лишим отсчета; .М—масса маслины. г ро акция под осеороа, ■ыдьаинвх ее массой и частью платформы; Л-гг—реакция изд передней опорой, аыиыняа* массой машины. платформы и опоры.. X—реакция вод передней опорой, налаянная массой мяюкыы: ₽--расстояние между опорамм;
Черт. 1
Определение поперечной координаты я горизонтальной плоскости у
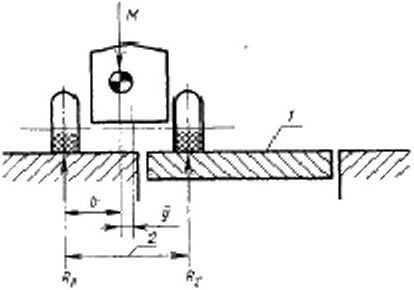
?—аесы; 2—колея. /\—иагрулкя и* даяые полиса или г><»«иду. Xi—нагрузке на прямые колеся или гусемни»; Af—масса метины. раннем Xi>Xj
. 4г (колен) г Колея
*=--^—у—2--Г;
Черт. 2
С. 8 ГОСТ Wia-M |ИСО ЛШ—77|
Определение вертикальной координаты центра тяжести fa
Вид сбоку
Вид свержу

J-raor. перши альни ft в обеих члоекостях: 2—iieetp тихости: .5-прнанатичеоип МОрО: 4-гесы; .Ц—масса и «инки: Я—реакция а касте опирания из шаны w# лмвдогосп ве<ов: Л— торизриталягие рэсееоянне реакции опори от линии оольемя; с—тарнэонтз лике рнссГОй-
••че центра тяжести от «пина подъема; с=———с /1—точка оарпсяеяпя ярихялжкпнЧ ли
пни 9од>ена с опорной поверхность»; ВВ'—лн^ня контакта с опорной поверхности»--, h-*-и сота центра тяжести яая уровнем опори
Черт. 3
ГОСТ 17248—8:7 [ИСО 5005 -77; С. 9
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Министерством строительного, дорожного и коммунального машиностроения СССР
1. Постановлением Государственного комитета СССР по стандартам от 30.03.87 № 1026 введен в действие государственный стандарт СССР ГОСТ 27248 — 87, в качестве которого непосредственно применен международный стандарт ИСО £005—77 с 01.01.83
Редактор А. Л. Владимирец Технический редактор ЛГ Н. Максимова Корректор В. И. Кануркина
Сдано в наб 27.04 87 Падп. ■ сея. 22.С6.8Г 0.75 yen. п. л. 0.75 уел. хр. »тт. йл5 уч.-ии л-Тир. £4X0 Ц<ла 5 кол.
Орден* «Звак Почет»» Издателхетоо стандартов. 123840. Москва. ГСП. Но»опр«кмскиа вер..3 Тип. «Московский печатник». Москва. ЛЯлии пер.. 6. Зак. 7245
{kind=link}