ГОСТ ISO 10968-2013
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
ОРГАНЫ УПРАВЛЕНИЯ ДЛЯ ОПЕРАТОРА
Earth-moving machinery. Operator's controls
МКС 53.100
Дата введения 2015-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-97 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью "Испытательный центр "Центральный научно-испытательный полигон строительных и дорожных машин" (ООО "ИЦ "ЦНИП СДМ") на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 267 "Строительно-дорожные машины и оборудование"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации по переписке (протокол от 27 декабря 2013 г. N 63-П)
За принятие проголосовали:
Краткое наименование страны по МК (ISO 3166) 004-97 | Код страны по МК (ISO 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Настоящий стандарт идентичен международному стандарту ISO 10968:2004* Earth-moving machinery - Operator's controls (Машины землеройные. Органы управления для оператора).
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить перейдя по ссылке на сайт . - .
Международный стандарт разработан Техническим комитетом по стандартизации ISO/TC 127 "Машины землеройные" Международной организации по стандартизации (ISO) и утвержден Европейским комитетом по стандартизации CEN в качестве европейского стандарта без внесения изменений.
Официальные экземпляры международного стандарта, на основе которого подготовлен настоящий межгосударственный стандарт, и международных стандартов, на которые даны ссылки, имеются в национальных органах по стандартизации.
Перевод с английского языка (en).
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам приведены в дополнительном приложении ДА.
Степень соответствия - идентичная (IDT).
Разработанный стандарт может быть использован при ежегодной актуализации перечня стандартов, содержащих правила и методы исследований (испытаний), а также стандартов, в результате применения которых на добровольной основе обеспечивается соблюдение требований технического регламента Таможенного союза "О безопасности машин и оборудования".
5 Приказом Федерального агентства по техническому регулированию и метрологии от 19 марта 2014 г. N 172-ст межгосударственный стандарт ГОСТ ISO 10968-2013 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2015 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты" (по состоянию на 1 января текущего года), а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
1 Область применения
Настоящий стандарт устанавливает требования и основные принципы управления для землеройных машин (определенных в ISO 6165), у которых устройство управления расположено на машине (для дистанционного управления машиной см. ISO 15817). Применение управления пальцами, рукой и ногой не исключает возможности использования других типов управления, расположения органов управления или их движения. Общие требования и принципы должны учитывать безопасность оператора и эргономику.
2 Нормативные ссылки
Для применения настоящего стандарта необходимы следующие ссылочные документы. Для датированных ссылок применяют только указанное издание ссылочного документа, для недатированных ссылок - последнее издание ссылочного документа.
ISO 3411* Earth-moving machinery - Human physical dimensions of operators and minimum operator space envelope (Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора)
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 3450 Earth-moving machinery - Braking systems of rubber-tyred machines - Systems and performance requirements and test procedures (Машины землеройные. Колесные или высокоскоростные с резиновыми гусеницами машины. Эксплуатационные требования и методики испытаний тормозных систем)
ISO 5010 Earth-moving machinery - Rubber-tyred machines - Steering requirements (Машины землеройные. Системы рулевого управления колесных машин)
ISO 6165 Earth-moving machinery - Basic types - Vocabulary (Машины землеройные. Основные типы. Идентификация, термины и определения)
ISO 6405-1 Earth-moving machinery - Symbols for operator controls and other displays - Part 1: Common symbols (Машины землеройные. Символы для органов управления и других индикаторов. Часть 1. Общие символы)
ISO 6405-2 Earth-moving machinery - Symbols for operator controls and other displays - Part 2: Specific symbols for machines, equipment and accessories (Машины землеройные. Символы для органов управления и устройств отображения информации. Часть 2. Специальные символы для машин, рабочего оборудования и приспособлений)
ISO 6682 Earth-moving machinery - Zones of comfort and reach for controls (Машины землеройные. Зоны комфорта и досягаемости для органов управления)
ISO 10264 Earth-moving machinery - Key-locked starting system (Машины землеройные. Пусковые системы со стопорным устройством)
ISO 10265 Earth-moving machinery - Crawler machines - Performance requirements and test procedures for braking systems (Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем)
ISO 13766 Earth-moving machinery - Electromagnetic compatibility (Машины землеройные. Электромагнитная совместимость)
ISO 15817:2005 Earth-moving machinery - Safety requirements for remote operator control![]() (Машины землеройные. Требования безопасности к дистанционному управлению)
(Машины землеройные. Требования безопасности к дистанционному управлению)
ISO 15998 Earth-moving machinery - Machine control systems (MCS) using electronic components - Performance criteria and tests![]() (Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания)
(Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания)
_______________![]() Будет опубликован.
Будет опубликован.
3 Термины и определения
В настоящем стандарте используются следующие термины с соответствующими определениями:
3.1 основные органы управления (primary control): Органы управления, которые оператор использует постоянно или часто (см. ISO 6682).
Примечание - Основные органы управления:
а) для базовой машины:
1) рулевое управление;
2) управление сцеплением или педалью хода;
3) управление переключением передач;
4) управление скоростью движения;
5) управление направлением движения;
6) управление тормозами;
7) управление вращательным/поворотным движением.
б) для оборудования:
1) управление поднятием/опусканием (например, рукоять погрузчика, бульдозерное оборудование, стрела экскаватора, боковая лебедка стрелы, лебедка канатного экскаватора);
2) управление увеличением вылета, уменьшением вылета или складыванием стрелы;
3) управление возвратно-поступательным движением (обратная лопата экскаватора);
4) управление дополнительным оборудованием (ковш, дополнительный ковш, грейферный ковш, пресс, опрокидывающийся кузов);
5) управление вращательным/поворотным движением.
3.2 вспомогательные органы управления (secondary control): Органы управления, которые редко используются оператором, но которые необходимы для нормальной работы машины (например, управление стояночным тормозом, освещением).
3.3 ответное действие машины (machine response): Движение базовой машины или дополнительного оборудования в ответ на активацию органов управления.
Пример - Подъем ковша, когда орган управления подъемом ковша перемещают в позицию поднятия; закрытие грейферного ковша, когда орган управления закрытием перемещается в позицию закрытия.
3.4 усилие на рычаг управления (control actuating force): Сила, действующая на центр контактной поверхности органа управления в направлении перемещения этой поверхности для достижения функции управления.
Примечание - Эта сила необязательно прикладывается оператором.
3.5 дистанционное управление (remote operator control): Управление машиной на расстоянии с помощью проводного или беспроводного пульта управления, включая дистанционное управление автономными функциями машины.
4 Положение органов управления
4.1 Расположение органов управления
Расположение органов управления должно соответствовать требованиям ISO 3411 и ISO 6682.
4.2 Расстояние между основными органами управления
4.2.1 Расстояние между расположенными рядом органами управления и органами управления и другими частями машины должно быть достаточным для исключения возможности непреднамеренной активации расположенных рядом органов управления. Совмещение элементов органов управления допустимо для обеспечения использования автономного и синхронного управления.
4.2.2 Расстояния между органами управления пальцем, ручным и ножным управлением или между этими типами управления и смежными элементами должны быть следующие.
Примечание - Расстояние между двумя соседними органами управления пальцами зависит от ширины органа управления. Поэтому расстояние между осевыми линиями расположенных рядом органов управления определено в зависимости от расположения устройства между двумя органами управления.
- Для органа управления пальцем расстояние между осевыми линиями двух соседних органов (исключая переключатель или сенсорную панель, предназначенную для активации клавиатуры):
1) без разделителя - 25 мм;
2) с разделителем - 18 мм.
- Для ручного управления (управление с использованием захвата пальцами) - 40 мм.
- Для ножного управления - 50 мм.
4.2.3 Если два расположенных рядом органа управления пальцами, органа ручного или ножного управления предназначены для одновременного использования, то расстояние между ними может быть уменьшено.
Расположение вспомогательных органов управления должно соответствовать тем же требованиям.
4.3 Меры против перемещения или повреждения внешним воздействием
Органы управления, привода и электропитание должны быть устроены таким образом, чтобы исключить повреждение или случайное перемещение в нежелательную позицию внешним воздействием: воздействие рукой или ногой, сотрясение (вибрация) машины.
4.4 Нескользкие педали
Поверхность педали должна быть нескользкой.
5 Перемещение органов управления
5.1 Общие требования
5.1.1 Перемещение органов управления относительно их нейтрального положения должно иметь общее направление с ответным действием машины, за исключением случаев, когда органы управления объединены или имеют иное использование (например, когда рабочее место оператора при управлении движением машины расположено на поворотной платформе машины, такой как верхняя поворотная часть экскаватора).
5.1.2 Если машина оснащена альтернативным рабочим местом оператора с дублирующими органами управления, то обе группы управления должны работать в одинаковом порядке. При работе одного узла органов управления другой должен быть неактивным. Работающий узел должен быть визуально четко определен визуальным индикатором.
Машина должна сохранять соответствие между воздействием на рулевое управление и направлением движения независимо от положения реверсивного привода.
5.1.3 Все органы управления должны автоматически возвращаться в нейтральное положение, когда оператор отпускает управление, за исключением органов управления, которые должны фиксироваться или находиться постоянно включенными.
5.1.4 Не должно быть никаких опасных перемещений во время или после пуска или прекращения электропитания или остановки двигателя.
Пуск системы - согласно ISO 10264.
5.1.5 Если сигналы управления передаются электрическим сигналом, то система управления должна соответствовать ISO 13766 и ISO 15998.
5.1.6 Органы управления должны быть расположены или снабжены стопорными устройствами или защищены таким образом, чтобы исключить их случайное включение во время входа или выхода оператора из машины, в соответствии с инструкциями изготовителя.
5.1.7 Тип, расположение и система работы основных органов управления для базовой машины указаны в приложении А, для оборудования - в приложении В. Неописанные в данных приложениях органы управления для оборудования (например, обратная лопата экскаватора-погрузчика) также должны следовать принципам приложения В.
5.1.8 Символы идентификации должны быть расположены на органах управления или рядом с ними. Если из-за ограничения пространства требуется схематичное изображение, показывающее основные органы управления, то оно должно быть хорошо видно оператору. Графические символы должны соответствовать требованиям ISO 6405-1 и ISO 6405-2.
5.2 Многофункциональные органы управления
5.2.1 Общие требования
Многофункциональные органы управления, используемые для управления базовой машиной и/или оборудованием, должны соответствовать нижеперечисленным требованиям в дополнение к 5.1.
5.2.2 Основные движения многофункциональных органов управления
Основные движения многофункциональных органов управления состоят из следующих движений (или их сочетаний):
- вперед/назад;
- влево/вправо;
- поворот/вращение (например, переключение передач вверх и вниз);
- вверх/вниз (подъем/опускание).
Допускаются комбинированные рабочие функции движения (например, вперед налево или вперед направо, назад налево или назад направо).
См. рисунок 1
Рисунок 1 - Основные функции многофункционального управления
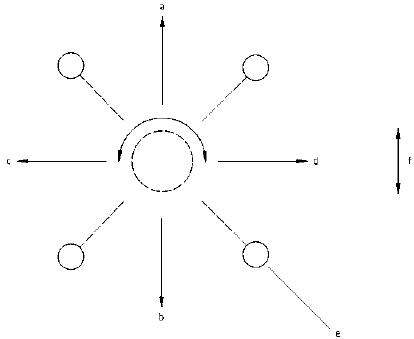
а - вперед; b - назад; с - влево; d - вправо; е - комбинированное управление; f - вверх/вниз (подъем/опускание)
Рисунок 1 - Основные функции многофункционального управления
5.2.3 Ответное действие машины на управление переключением
При многофункциональном управлении движением переключение на другую основную функцию (см. приложения А и В) допустимо, если механизм управления имеет табличку или визуальный индикатор, обеспечивающие информирование оператора об управлении движением и ответное действие машины в основной позиции и позиции переключения.
5.2.4 Расположение дополнительных механизмов управления в многофункциональном управлении
Дополнительные механизмы управления, такие как кнопки или переключатели, могут быть расположены на основных или вспомогательных органах управления. Их число не должно превышать четырех дополнительных механизмов на органах управления (например, поворот грейфера вправо/удержание/влево, движение вперед/нейтральное положение/назад, блокировка/разблокировка подвески, стабилизация вверх/удержание/вниз).
Дополнительные механизмы управления и ответное действие машины должны быть обозначены табличкой или визуальным индикатором.
Активация нажатием органов управления, таких как клавиша или сенсорные панели, исключена из этих требований.
6 Усилие на органах управления
6.1 Максимальное усилие на органах управления не должно превышать значений, указанных в таблице 1. Исключение составляют чрезвычайные ситуации.
6.2 Минимальное усилие на органах управления должно быть таким, чтобы исключить случайное изменение их положения (см. таблицу 1 и п.5.1.6).
6.3 Усилия на рычаги управления, приведенные в таблице 1, не применяются к тормозной и рулевой системам. Значения максимального усилия для этих систем приведены в ISO 3450, ISO 10265 и ISO 5010.
6.4 Минимальная механическая прочность органов управления должна превышать значения показателей нормального управления, указанные в таблице 1, не менее чем в 5 раз.
6.5 Направление усилия на органы управления должно учитывать положение оператора при управлении.
Таблица 1 - Усилие на органы управления
Органы управления | Усилие на рычаги управления, Н | ||
Максимальное | Номинальное (часто повторяющееся оператором) | Минимальное | |
Рука |
|
|
|
Ступня | 450 | 120 | 30 30 |
Носок ботинка |
|
|
|
Клавиатура |
|
|
|
|
Приложение А (обязательное). Машины землеройные - Основные органы управления для базовой машины
Приложение А
(обязательное)
Таблица А
N | Органы управления | Расположение | Эксплуатационные требования |
А.1 | Рулевое управление | ||
А.1.1 | Рулевое колесо | Перед оператором (см. 4.1) | Вращение по часовой стрелке должно обеспечивать поворот направо, вращение против часовой стрелки - поворот налево |
А.1.2 | Ручное управление: один рычаг управления | См.4.1 | Перемещение рычага влево должно обеспечивать левый поворот, перемещение рычага вправо - правый поворот |
А.1.3 | Ручное управление: два рычага управления | См.4.1 | Перемещение левого рычага вперед и/или правого назад должно обеспечивать поворот направо. |
А.2 | Педали сцепления и медленного хода | ||
Ножное управление | Доступность для левой ноги оператора (см.4.1) | Нажатие педали вперед и/или вниз должно обеспечивать отключение | |
А.3 | Устройства для выбора/переключения передачи | ||
А.3.1 | Ручное управление | См.4.1 | Схема переключения должна быть простой и четко обозначенной. Нейтральная позиция должна четко и легко определяться |
А.3.2 | Управление пальцем | Доступность для оператора (см.4.1) | Нажатие верхней/правой кнопкой должно обеспечивать повышение передачи, нажатие нижней/левой кнопки - понижение передачи |
А.4 | Скорость - Частота вращения вала двигателя и/или скорость движения машины | ||
А.4.1 | Ножное управление ускорение уменьшение скорости | Доступность для правой ноги оператора (см.4.1) | Ускорение: движение вперед и/или вниз должно увеличивать скорость. |
Ножное управление уменьшение скорости | Доступность для правой ноги оператора (см.4.1) | Движение вперед и/или вниз должно уменьшать скорость | |
А.4.2 | Ручное управление рычагом | См.4.1 | Ускорение: движение вперед и/или вниз должно увеличивать скорость. |
А.4.3 | Управление пальцами | Доступность для руки оператора (см.4.1) | Ускорение: нажатие кнопки/переключателя ускорения должно увеличивать скорость |
А.5 | Передвижение машины | ||
А.5.1 | Направление управления: вперед-назад с неизменной скоростью | ||
Ручное управление или управление рукой и пальцами | Доступность для оператора (см.4.1) | Перемещение управления или рычага вперед/вверх или вправо должно обеспечивать движение вперед. Перемещение управления или рычага назад/вниз или влево должно обеспечивать движение назад | |
А.5.1.2 | Управление пальцами | Доступность для оператора (см.4.1) | Нажатие верхней кнопки должно обеспечивать движение вперед. Нажатие нижней кнопки должно обеспечивать движение назад |
А.5.2 | Комбинация скорости и направления движения - | ||
А.5.2.1 | Ручное управление | Доступность для оператора (см.4.1) | Перемещение управления из нейтрального положения вперед и/или вверх должно обеспечивать движение вперед и увеличение скорости. |
А.5.2.2 | Ножное управление: одна педаль управления | Доступность для правой ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
А.5.2.3 | Ножное управление: две педали управления | Доступность для ног оператора (см.4.1) | Движение вперед и/или вниз правой педали должно обеспечивать движение вперед и увеличение скорости. |
Движение вниз левой педали должно обеспечивать движение назад и увеличение задней скорости | |||
А.5.3 | Комбинация скорости направления движения и рулевого управления - Комбинированное управление с непрерывным изменением движения | ||
А.5.3.1 | Ручное управление: один рычаг управления | Доступность для оператора (см.4.1) | Движение рычага вперед должно обеспечивать движение вперед и увеличение скорости. |
А.5.3.2 | Ручное управление: два рычага управления | Доступность для оператора (см.4.1) | Движение вперед обоих рычагов должно обеспечивать движение вперед и увеличение скорости. |
А.5.3.3 | Ножное управление: две педали управления | Доступность для оператора переднего расположения (см.4.1) | Педаль должна поворачиваться под ногой оператора и должна находиться в нейтральном положении в состоянии покоя. |
А.6 | Тормоза | ||
А.6.1 | Рабочий тормоз | ||
А.6.1.1 | Ножное управление | См.4.1 | Направление движения должно быть вперед и/или вниз |
А.6.1.2 | Ручное управление | См.4.1 | Предпочтительно применять тянущее движение |
А.6.2 | Стояночный тормоз | ||
А.6.2.1 | Ножное управление | См.4.1 | Направление движение должно быть вперед и/или вниз |
А.6.2.2 | Ручное управление | См.4.1 | Предпочтительно применять тянущее движение |
А.6.3 | Комбинированное рулевое и тормозное управление | ||
А.6.3.1 | Ножное управление: две совмещенные педали управления | См.4.1 | Движение правой педали вниз должно обеспечивать поворот направо. |
А.6.3.2 | Ножное управление: три педали управления | См.4.1 | Движение правой педали вниз должно обеспечивать поворот направо. |
А.6.3.3 | Ручное управление или управление пальцем | Доступность для руки оператора (см.4.1) | Движение правым рычагом назад должно обеспечивать правый поворот. |
А.6.4 | Тормоз поворота/вращения | ||
Ножное управление | Доступность для левой ноги оператора (см.4.1) | Движение должно быть направлено вниз | |
А.7 | Поворотное/вращательное движение | ||
А.7.1 | Ручное управление - Поворотный рычаг | Доступность для оператора (см.4.1) | Движение по часовой стрелке должно обеспечивать вращение по часовой стрелке |
А.7.2 | Вращение/поворот верхней части | ||
А.7.2.1 | Ручное управление: один рычаг управления | Доступность для левой руки оператора (см.4.1) | Движение переднего рычага управления должно обеспечивать поворот по часовой стрелке |
А.7.2.2 | Ручное управление: многофункциональный Рычаг управления | Доступность для левой руки оператора (см.4.1) | Движение рычага направо должно обеспечивать поворот по часовой стрелке |
Приложение В (обязательное). Машины землеройные - Основные органы управления оборудованием
Приложение В
(обязательное)
Таблица В
N | Органы управления | Расположение | Эксплуатационные требования |
В.1 | Поднятие/опускание | ||
В.1.1 | Ручное управление | Доступность для правой руки оператора (см.4.1) | Движение рычага назад должно обеспечивать подъем оборудования, движение рычага вперед - опускание оборудования |
В.1.2 | Ножное управление: одна педаль управления | Доступность для ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.1.3 | Ножное управление: две педали управления | Доступность для ног оператора (см.4.1) | Движение правой педалью вниз должно обеспечить подъем оборудования, |
В.1.4 | Кузов самосвала | Доступность для руки оператора (см.4.1) | Движение рычага назад или вверх должно обеспечивать подъем кузова, движение рычага вперед или вниз - опускание кузова. |
В.1.5 | Рыхлители | Доступность для правой руки оператора (см.4.1) | Движение рычага назад или влево должно обеспечивать подъем оборудования, |
В.2 | Выдвижение/втягивание | ||
В.2.1 | Ручное управление | Доступность для левой руки оператора (см.4.1) | Движение рычага вперед или влево должно обеспечивать выдвижение оборудования, |
В.2.2 | Управление пальцем | Доступность для левой руки оператора (см.4.1) | Нажатие верхней/левой кнопки должно обеспечивать выдвижение оборудования, |
В.2.3 | Ножное управление: одна педаль управления | Доступность для правой ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.2.4 | Ножное управление: две педали управления | Доступность для ног оператора (см.4.1) | Движение правой педали вниз должно обеспечивать выдвижение оборудования. |
В.3 | Движение назад - вперед | ||
В.3.1 | Ручное управление | Доступность для левой руки оператора (см.4.1) | Движение рычага назад должно обеспечивать движение в обратном направлении, |
В.3.2 | Управление пальцами | Доступность для левой руки оператора (см.4.1) | Нажатие верхней/левой кнопки/рычага должно обеспечивать движение вперед, |
В.3.3 | Ножное управление: одна педаль управления | Доступность для левой ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.3.4 | Ножное управление: две педали | Доступность для ног оператора (см.4.1) | Движение правой педали вниз должно обеспечивать движение вперед, движение левой педали вниз - движение назад |
В.4 | Ответное действие основного/дополнительного оборудования | ||
В.4.1 | Ручное управление: один рычаг управления | Доступность для правой руки оператора (см.4.1) | Движение рычага назад должно обеспечивать активацию рабочего процесса |
В.4.2 | Ручное управление: многофункциональный рычаг управления | Доступность для правой руки оператора (см.4.1) | Движение рычага влево должно обеспечивать активацию рабочего процесса |
В.4.3 | Управление пальцами | Доступность для правой руки оператора (см.4.1) | Движение рычага назад должно обеспечивать активацию рабочего процесса |
В.4.4 | Ножное управление: одна педаль управления | Доступность для правой ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.4.5 | Ножное управление: две педали управления | Доступность для правой ноги оператора (см.4.1) | Движение правой/левой педали вниз должно обеспечивать активацию рабочего процесса |
В.4.6 | Ножное управление: одна педаль управления для шарнирного дополнительного оборудования | Доступность для правой ноги оператора | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.5 | Поворот/вращение | ||
В.5.1 | Ручное управление: один рычаг управления | Доступность для левой руки оператора (см.4.1) | Движение рычага вперед или вправо должно обеспечивать вращение по часовой стрелке |
В.5.2 | Ручное управление: многофункциональный рычаг управления | Доступность для левой руки оператора (см.4.1) | Движение рычага вправо должно обеспечивать вращение по часовой стрелке, движение рычага влево - вращение против часовой стрелки |
В.5.3 | Ручное управление: поворотный рычаг управления | Доступность для оператора (см.4.1) | Движение по часовой стрелке должно обеспечивать вращение по часовой стрелке |
В.5.4 | Управление пальцами | Доступность для левой руки оператора (см.4.1) | Нажатие правой кнопки должно обеспечивать вращение по часовой стрелке |
В.5.5 | Ножное управление: одна педаль управления | Доступность для левой ноги оператора (см.4.1) | Педаль должна поворачиваться под ногой оператора и находиться в нейтральном положении в состоянии покоя. |
В.5.6 | Ножное управление: две педали управления | Доступность для левой ноги оператора (см.4.1) | Движение вперед и/или вниз правой педали должно обеспечивать вращение по часовой стрелке. |
|
Приложение ДА (справочное). Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Приложение ДА
(справочное)
Таблица ДА.1
Обозначение и наименование ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 3411 Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора | - | * |
ISO 3450 Машины землеройные. Колесные или высокоскоростные с резиновыми гусеницами машины. Эксплуатационные требования и методики испытаний тормозных систем | - | * |
ISO 5010 Машины землеройные. Системы рулевого управления колесных машин | - | * |
ISO 6165 Машины землеройные. Основные типы. Идентификация, термины и определения | - | * |
ISO 6405-1 Машины землеройные. Символы для органов управления и других индикаторов. Часть 1. Общие символы | - | * |
ISO 6405-2 Машины землеройные. Символы для органов управления и устройств отображения информации. Часть 2. Специальные символы для машин, рабочего оборудования и приспособлений | - | * |
ISO 6682 Машины землеройные. Зоны комфорта и досягаемости для органов управления | MOD | ГОСТ 27258-87 (ISO 6682-86) Машины землеройные. Зоны комфорта и досягаемости органов управления |
ISO 10264 Машины землеройные. Пусковые системы со стопорным устройством | - | * |
ISO 10265 Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем | - | * |
ISO 13766 Машины землеройные. Электромагнитная совместимость | - | * |
ISO 15817:2005 Машины землеройные. Требования безопасности к дистанционному управлению | - | * |
ISO 15998 Землеройные машины. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. |
__________________________________________________________________________
УДК 621.869.4-788:629.614.006.354 MКC 53.100 IDT
Ключевые слова: органы управления, основные органы управления, вспомогательные органы управления, ответное действие машины, усилие на рычаги управления
__________________________________________________________________________
Электронный текст документа
и сверен по:
официальное издание
М.: Стандартинформ, 2014
{kind=link}