ГОСТ ISO 15219-2017
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
ЭКСКАВАТОРЫ КАНАТНЫЕ
Термины, определения и техническая характеристика для коммерческой документации
Earth-machinery. Cable excavators. Terminology and commercial specifications
МКС 53.100
Дата введения 2021-12-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Государственным комитетом по стандартизации Республики Беларусь
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 20 апреля 2017 г. N 98-П)
За принятие стандарта проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Азербайджан | AZ | Азстандарт |
Армения | AM | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Туркмения | TM | Главгосслужба "Туркменстандартлары" |
Узбекистан | UZ | Узстандарт |
(Поправка. ИУС N 1-2023), (Поправка. ИУС N 8-2023).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 20 августа 2021 г. N 740-ст межгосударственный стандарт ГОСТ ISO 15219-2017 введен в действие в качестве национального стандарта Российской Федерации с 1 декабря 2021 г.
5 Настоящий стандарт идентичен международному стандарту ISO 15219:2004* "Машины землеройные. Экскаваторы канатные. Терминология и технические характеристики для коммерческой документации" ("Earth-moving machinery - Cable excavators - Terminology and commercial specifications", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан подкомитетом SC 4 "Классификация и технические характеристики для коммерческой документации" Технического комитета по стандартизации ISO/TC 127 "Землеройные машины" Международной организации по стандартизации (ISO).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
ВНЕСЕНЫ: поправка, опубликованная в ИУС N 1, 2023 год; поправка, опубликованная в ИУС N 8, 2023 год
Поправки внесены изготовителем базы данных
1 Область применения
Настоящий стандарт устанавливает термины, определения и содержание технических характеристик для коммерческой документации самоходных гусеничных и колесных канатных экскаваторов, а также рабочего оборудования. Канатные экскаваторы предназначены главным образом для применения драглайна, прямой лопаты или грейферного захвата и для кратковременного выполнения погрузочно-разгрузочных работ. Вместе с тем базовая машина часто используется как шасси рабочего оборудования для специального применения, такого как бурение и забивание свай, однако технические характеристики и размеры такого оборудования не включены в область применения настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта. Для недатированных - последнее издание стандарта (включая все изменения).
ISO 6016, Earth-moving machinery - Methods of measuring the masses of whole machines, their equipment and components (Машины землеройные. Методы измерений масс машин в целом, рабочего оборудования и составных частей)
ISO 6746-1:2003, Earth-moving machinery - Definitions of dimensions and codes - Part 1: Base machine (Машины землеройные. Определение и условные обозначения размерных характеристик. Часть 1. Базовая машина)
ISO 6746-2:2003, Earth-moving machinery - Definitions of dimensions and codes - Part 2: Equipment and attachments (Машины землеройные. Определение и условные обозначения размерных характеристик. Часть 2. Оборудование и приспособления)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 экскаватор (excavator): Самоходная машина на колесном, гусеничном или шагающем ходу, имеющая верхнюю часть, способную поворачиваться на 360°, со смонтированным рабочим оборудованием, предназначенная главным образом для копания с помощью ковша без перемещения ходовой части в течение всего рабочего цикла машины.
[ISO 6165:2001, терминологическая статья 1.2.4]
Примечание 1 - Рабочий цикл экскаватора включает в себя следующие операции: копание, подъем, перемещение с поворотом и разгрузку материала.
Примечание 2 - Экскаватор также может использоваться для погрузки-разгрузки материалов или предметов.
3.2 канатный экскаватор (cable excavator): Экскаватор, имеющий поворотную платформу с канатным приводом рабочего оборудования, предназначенный главным образом для копания плотных или уплотненных материалов с помощью драглайна, прямой лопаты или грейферного захвата, выполнения работ по разрушению с помощью крюка или шара, а также выполнения погрузочно-разгрузочных работ с помощью специального рабочего и сменного оборудования.
[ISO 6165:2001, терминологическая статья 1.2.4.3]
3.3. базовая машина (base machine): Машина, оснащенная кабиной или навесом и при необходимости устройствами для защиты оператора, без рабочего или сменного оборудования, но с необходимыми креплениями для подобного оборудования.
[ISO 6746-1:2003, терминологическая статья 3.3]
Примечание - Базовая машина имеет необходимые крепления для монтажа рабочего оборудования и сменного оборудования, установленного в разделе 5.
3.4 рабочее оборудование (equipment): Комплект составных частей, монтируемых на базовую машину для обеспечения выполнения сменным оборудованием ее основной функции в соответствии с назначением.
[ISO 6746-2:2003, терминологическая статья 3.4]
3.5 сменное оборудование (attachment): Сборочные узлы, которые могут быть установлены на базовую машину или рабочее оборудование для специального использования.
[ISO 6746-2:2003, терминологическая статья 3.5]
3.6 составная часть (component): Часть или узел, составляющие базовую машину, рабочее или сменное оборудование.
[ISO 6746-2:2003, терминологическая статья 3.6]
3.7 опорная плоскость отсчета, GRP (ground reference plane): Плоскость, на которую устанавливается машина для проведения измерений: для базовой машины - твердая ровная поверхность, для рабочего и сменного оборудования - твердая ровная поверхность или уплотненная земля.
Примечание - Тип используемой поверхности зависит от предусмотренного применения машины, а также ее рабочего и сменного оборудования. Он должен определяться при разработке терминологических стандартов ISO или коммерческой документации.
[ISO 6746-2:2003, терминологическая статья 3.2]
4 Базовая машина
4.1 Типы канатных экскаваторов
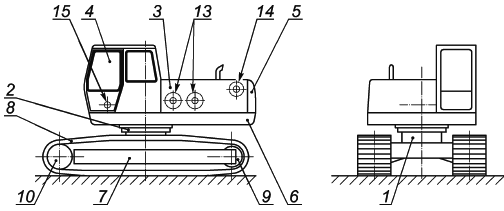
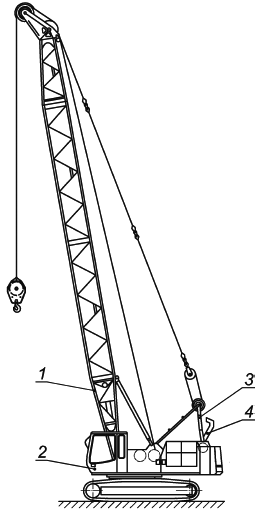
4.1.1 Гусеничный экскаватор
См. рисунок 1.
|
Рисунок 1 - Гусеничный экскаватор
4.1.2 Колесный экскаватор
См. рисунок 2.
|
Рисунок 2 - Колесный экскаватор
4.2 Размерные характеристики
Размерные характеристики базовой машины, приведенные на рисунках 3 и 4, должны соответствовать установленным в приложении А (размеры строго привязаны и относятся только к канатным экскаваторам) и ISO 6746-1:2003 (приложения A-D).
|
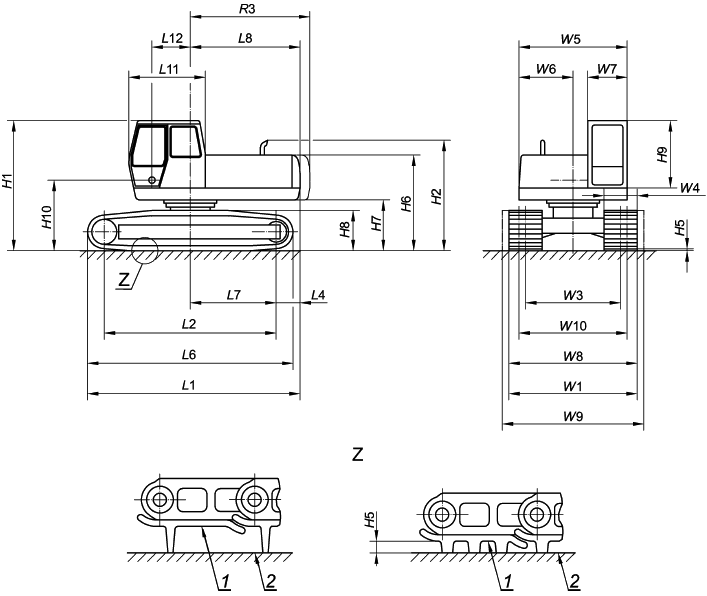
1 - наружная поверхность; 2 - опорная плоскость отсчета (GRP)
Рисунок 3 - Размерные характеристики базовой машины. Гусеничный экскаватор
|
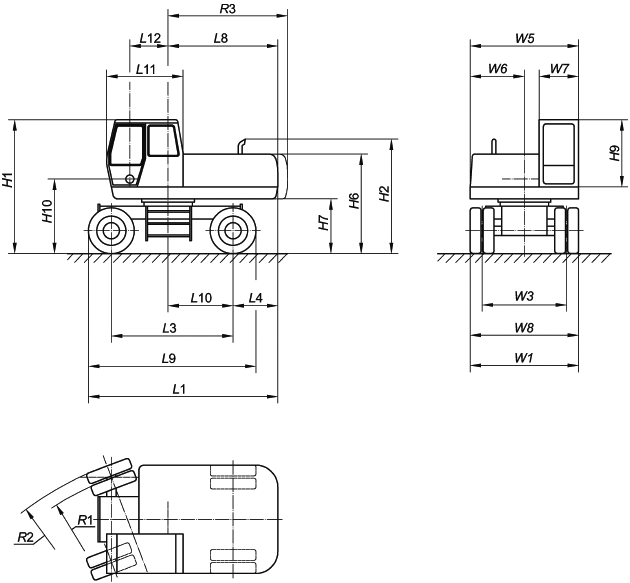
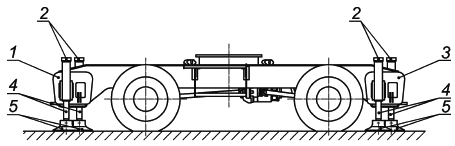
Рисунок 4 - Размерные характеристики базовой машины. Колесный экскаватор
4.3 Массы
Массы должны быть определены в соответствии с ISO 6016.
4.4 Наименования составных частей
См. рисунок 5.
|
а) |
|
b) |
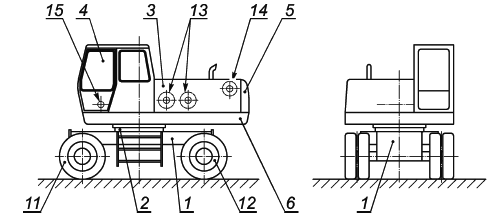
1 - шасси; 2 - опора поворотной платформы; 3 - поворотная платформа; 4 - кабина; 5 - противовес; 6 - рама поворотной платформы; 7 - рама гусеничного шасси; 8 - гусеничный движитель; 9 - направляющее колесо; 10 - ведущее колесо; 11 - управляемая ось (передняя); 12 - жесткая ось (задняя); 13 - тяговая лебедка; 14 - подъемная лебедка привода стрелы; 15 - ось вращения стрелы
Рисунок 5 - Наименования составных частей базовой машины
5 Рабочее и сменное оборудование
5.1 Размерные характеристики
5.1.1 Общие положения
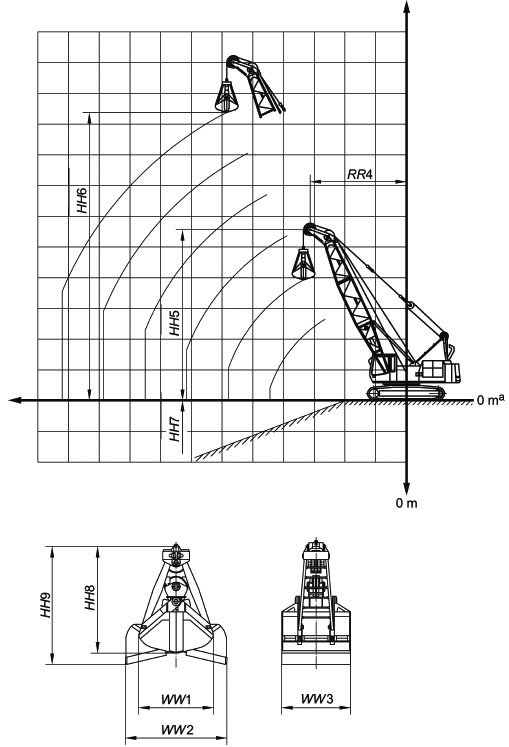
Описание рабочего и сменного оборудования, размерные характеристики которого приведены на рисунках 6-8, основано на определении главной геометрической рабочей зоны наиболее общих применений канатных экскаваторов.
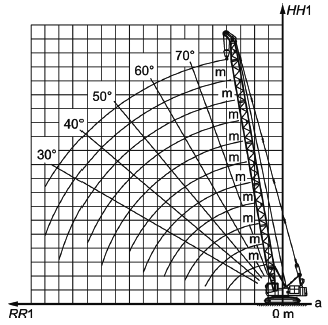
5.1.2 Грузоподъемное оборудование
Грузоподъемное оборудование состоит из стрелы, головки стрелы, блока полиспастов и первоначальных описаний рабочей зоны стрелы в отношении конфигурации стрелы. Размерные характеристики должны соответствовать приведенным на рисунке 6 и в приложении В.
|
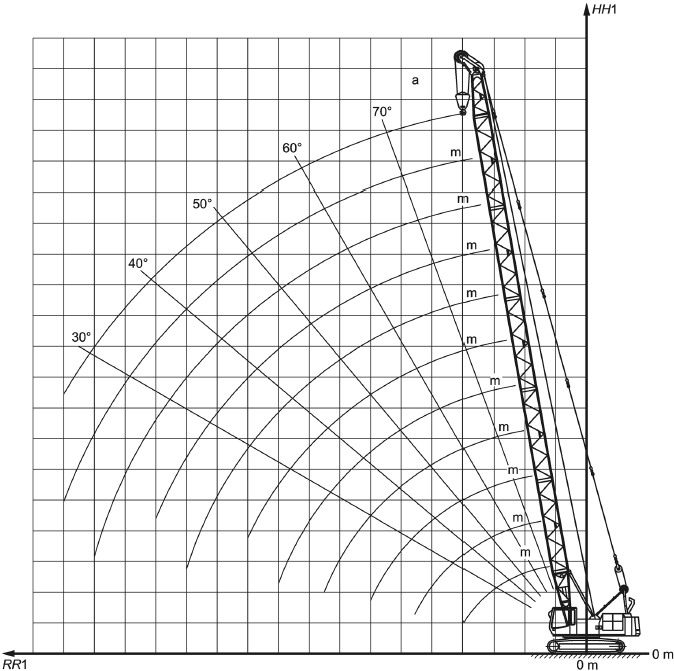
При длине стрелы ...
Рисунок 6 - Зона досягаемости оборудования при подъеме
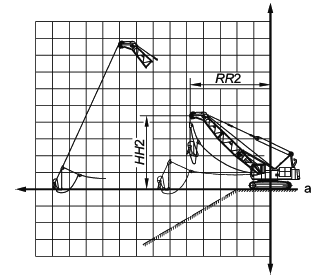
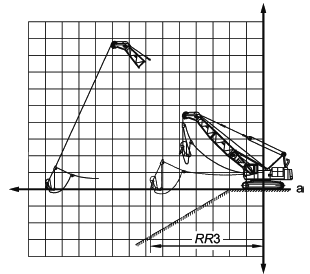
5.1.3 Драглайн
Драглайн состоит из стрелы, ковша, канатов и направляющего устройства, которое режет материал - обычно навстречу машине - волочением ковша тяговой лебедкой. Размерные характеристики должны соответствовать приведенным на рисунке 7 и в приложении В.
|
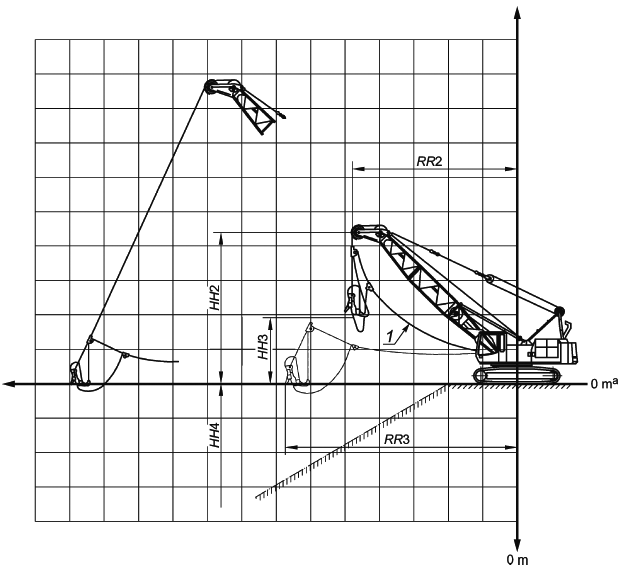
1 - подвесной канат
Опорная плоскость отсчета (GRP).
Рисунок 7 - Размерные характеристики драглайна
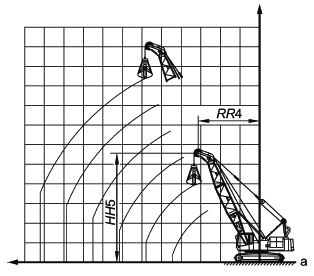
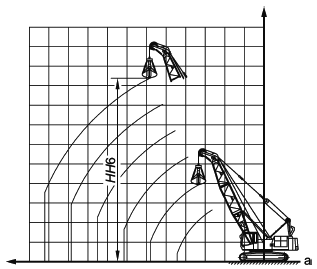
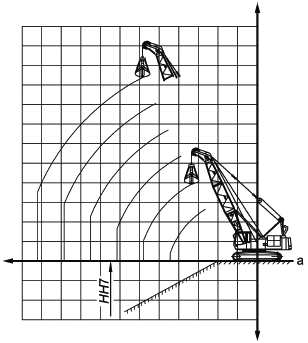
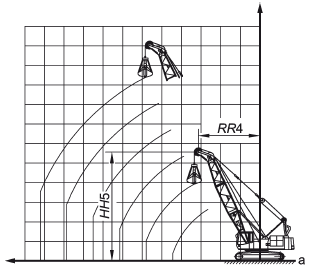
5.1.4 Грейферное оборудование
Грейферное оборудование состоит из стрелы, каната и грейфера для выемки и захвата, выполняемых, как правило, вертикально, и выгрузки ниже и выше GRP. Размерные характеристики должны соответствовать приведенным на рисунке 8 и в приложении В.
|
Опорная плоскость отсчета (GRP).
Рисунок 8 - Размерные характеристики захвата/грейфера и его оборудования
5.1.5 Стабилизирующее оборудование
Стабилизирующее оборудование состоит из рам спереди и сзади, двух отдельных телескопических регулируемых блоков аутригеров спереди и сзади, которые соединены с вертикальными подвижными аутригерами. Размерные характеристики должны соответствовать приведенным на рисунке 9 и в приложении В.
|
Правая сторона (RH).
Левая сторона (LH).
Рисунок 9 - Размеры стабилизирующего оборудования
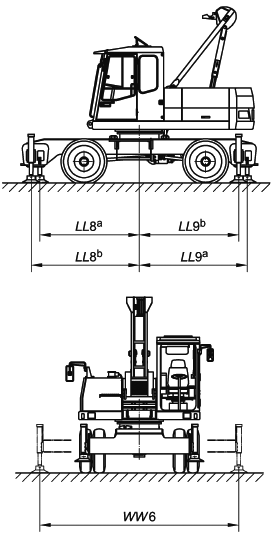
5.2 Размеры при транспортировании, погрузке и перемещении
5.2.1 Транспортирование и отгрузка
Размерные характеристики должны соответствовать приведенным на рисунке 10 и в приложении В.
|
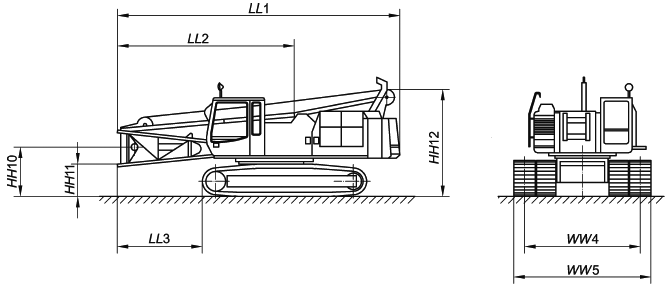
Рисунок 10 - Размеры гусеничной машины с базовым оборудованием при транспортировании и погрузке
5.2.2 Перемещение по дорогам общего пользования
Размерные характеристики должны соответствовать приведенным на рисунке 10 и в приложении В.
|
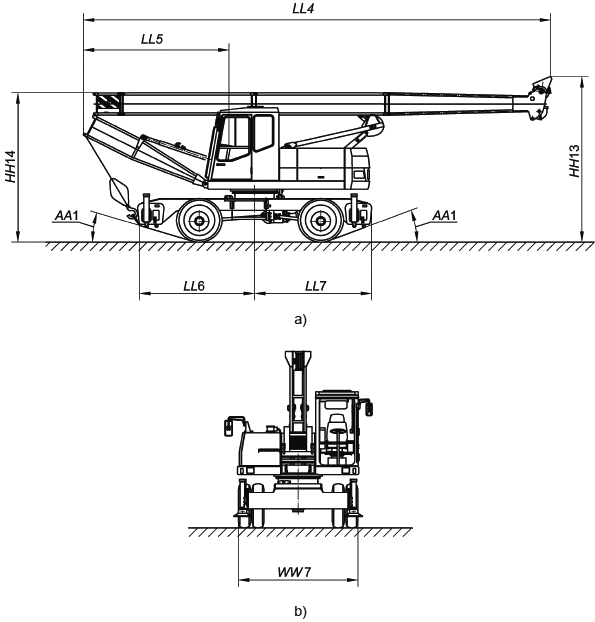
Рисунок 11 - Размеры колесного канатного экскаватора, перемещаемого по дорогам общего пользования
5.3 Наименования составных частей
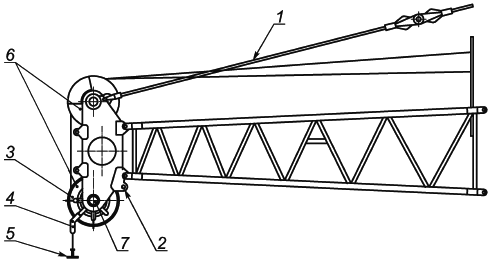
5.3.1 Подъемное оборудование
См. рисунок 12.
|
1 - ось вращения стрелы; 2 - нижняя секция стрелы; 3 - промежуточная секция стрелы; 4 - головка стрелы; 5 - двуногая стойка; 6 - канат подвески стрелы; 7 - устройство балансировки вылета; 8 - канат вылета стрелы; 9 - канат лебедки; 10 - крюк в сборе; 11 - лебедка вылета стрелы; 12 - подъемная лебедка; 13 - противовес
Рисунок 12 - Подъемное оборудование
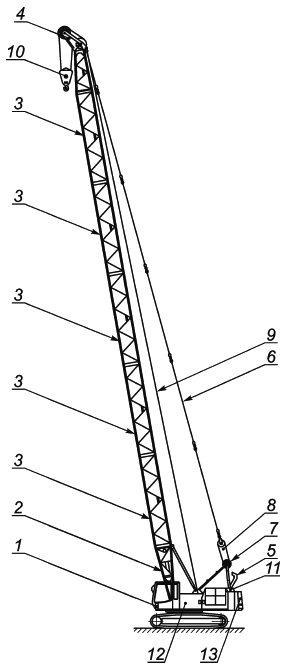
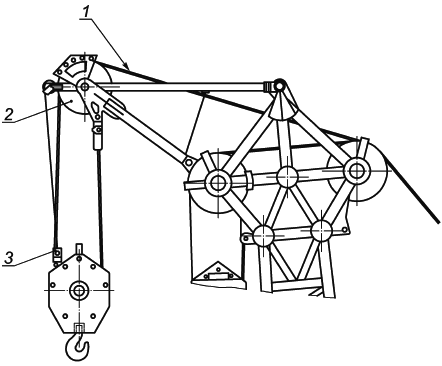
5.3.2 Драглайн
См. рисунок 13.
|
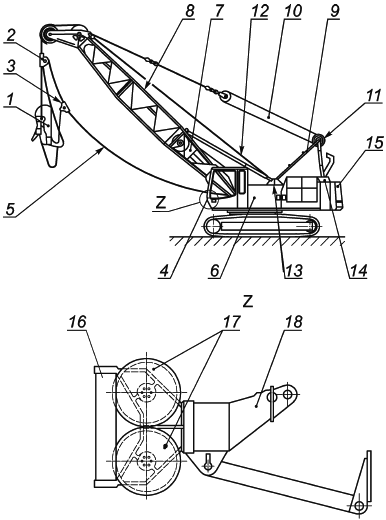
1 - ковш; 2 - блок разгрузки; 3 - трехветьевой тяговый узел; 4 - блочное направляющее устройство; 5 - тяговый канат; 6 - тяговая лебедка; 7 - нижняя секция стрелы; 8 - промежуточная секция стрелы; 9 - двуногая стойка; 10 - канат подвески стрелы; 11 - устройство балансировки вылета; 12 - подъемный канат; 13 - подъемная лебедка; 14 - лебедка изменения вылета стрелы; 15 - противовес; 16 - направляющая каната; 17 - блок шкивов; 18 - вращающаяся опора
Рисунок 13 - Драглайн
5.3.3 Расположение лебедки и шкива
См. рисунок 14.
|
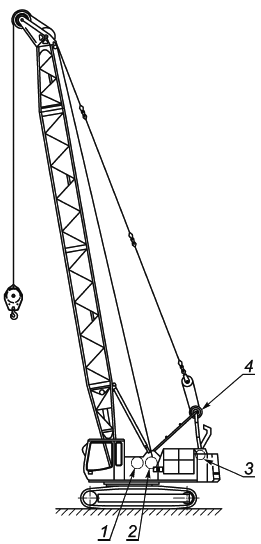
1 - тяговая лебедка 1; 2 - тяговая лебедка 2; 3 - подъемная лебедка привода стрелы; 4 - блок шкивов двуногой стойки
Рисунок 14 - Расположение лебедки и шкива
5.3.4 Головка стрелы
См. рисунки 15-17.
|
1 - канат подвески стрелы; 2 - блок шкивов; 3 - защита каната; 4 - точка фиксации каната для системы запасовки каната; 5 - ось вращения
Рисунок 15 - Головка стрелы экскаватора
|
1 - канат подвески стрелы; 2 - точка фиксации каната для системы запасовки каната; 3 - защита каната; 4 - верхний концевой выключатель
Рисунок 16 - Головка стрелы для работы в тяжелых условиях
|
1 - рама в сборе; 2 - шкив; 3 - верхний концевой выключатель
Рисунок 17 - Вспомогательная укосина
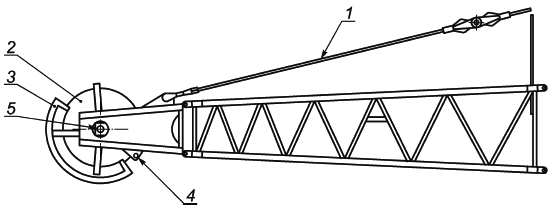
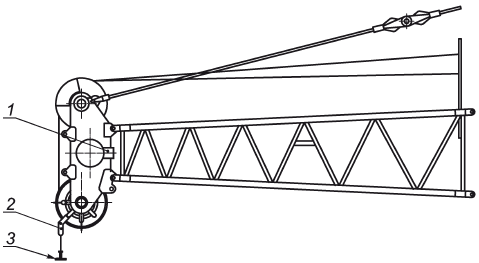
5.3.5 Нижняя секция стрелы
См. рисунки 18 и 19.
|
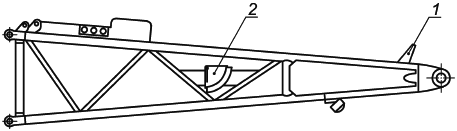
1 - устройство ограничения вылета стрелы; 2 - индикатор угла наклона стрелы
Рисунок 18 - Нижняя секция стрелы
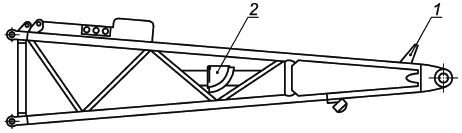
|
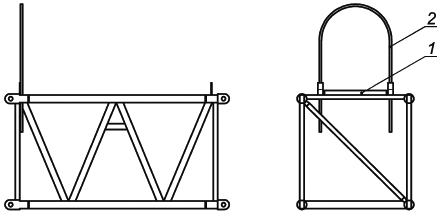
1 - защита каната; 2 - корзина каната
Рисунок 19 - Нижняя секция стрелы
5.3.6 Крюк в сборе
См. рисунок 20.
|
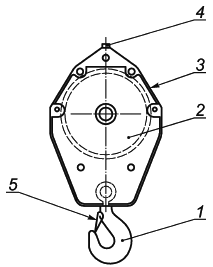
1 - крюк; 2 - шкив; 3 - рама в сборе; 4 - фиксация каната; 5 - предохранительный замок
Рисунок 20 - Крюк в сборе
5.3.7 Устройство безопасности
5.3.7.1 Устройство ограничения подъема подъемного каната
См. рисунок 21.
|
1 - стопор для устройства ограничения подъема подъемного каната; 2 - верхний концевой ограничитель; 3 - шарнир с рычагом ограничительного устройства
Рисунок 21 - Устройство ограничения подъема
5.3.7.2 Индикатор угла и ограничительное устройство
См. рисунок 22.
|
1 - устройство ограничения вылета стрелы; 2 - индикатор угла наклона стрелы
Рисунок 22 - Индикатор угла и устройство ограничения движения подъема
5.3.7.3 Устройство ограничения грузового момента
См. рисунок 23.
|
1 - электронный индикатор угла наклона стрелы; 2 - индикация угла наклона стрелы и грузового момента в процентах; 3 - электронная система ограничения грузового момента; 4 - устройство измерения усилия
Рисунок 23 - Устройство ограничения грузового момента
5.3.7.4 Шасси, аутригеры
См. рисунок 24.
|
1 - рама переднего аутригера; 2 - телескопический регулируемый блок; 3 - рама заднего аутригера; 4 - цилиндр аутригера; 5 - опора аутригера
Рисунок 24 - Стабилизирующее оборудование
5.3.8 Специальные применения, когда базовая машина используется как шасси
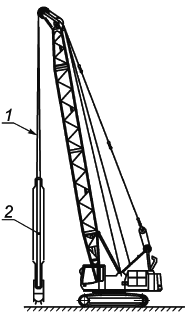
5.3.8.1 Бурильное оборудование
См. рисунки 25 и 26.
|
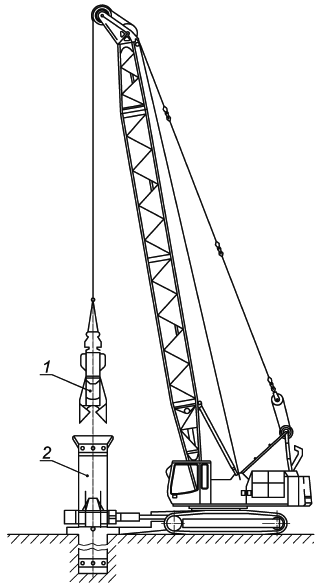
1 - одно- или двухканатный захват; 2 - обсадной вибратор
Рисунок 25 - Обсадной вибратор
|
а)
|
b)
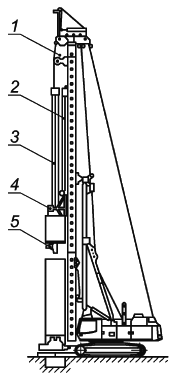
1 - направляющая; 2 - устройство подачи; 3 - ведущая штанга; 4 - бурильный механизм; 5 - бур; 6 - устройство подъема с лебедкой
Рисунок 26 - Бурильное оборудование
5.3.8.2 Сваезабивное оборудование
См. рисунок 27.
|
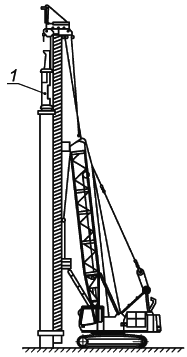
1 - гидравлический или дизельный молот
Рисунок 27 - Сваезабивное оборудование
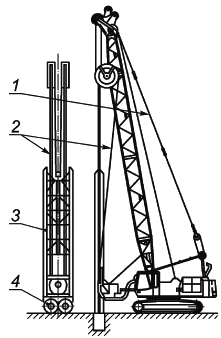
5.3.8.3 Оборудование для резки стен
См. рисунки 28-30.
|
1 - два подъемных каната; 2 - диафрагменный стеновой захват
Рисунок 28 - Оборудование для резки стен
|

1 - ведущая штанга; 2 - диафрагменный стеновой захват
Рисунок 29 - Диафрагменный стеновой захват бурильного типа
|
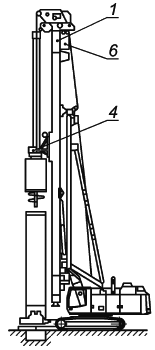
1 - полиспаст для гидравлических рукавов и рукавов подвески; 2 - цилиндр подачи; 3 - направляющая рама; 4 - колесо резака
Рисунок 30 - Диафрагменный стеновой резак
Приложение A
(обязательное)
Размерные характеристики базовой машины
В настоящем приложении приведены определения и условные обозначения размерных характеристик базовой машины для канатных экскаваторов. Пояснения базовых размерных характеристик всех землеройных машин и их определений с использованием трехмерной системы координат и системы условных обозначений для идентификации размерных характеристик базовой машины см. в ISO 6746-1.
Таблица A.1
Условное обозначение | Термин и определение | Рисунок |
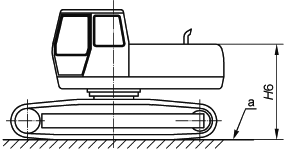
H6 | высота поворотной платформы (turntable height): Расстояние по координатной оси Z между GRP и самой верхней точкой поворотной платформы |
|
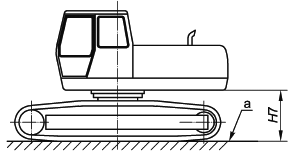
H7 | высота в свету под верхней конструкцией (clearance height under upper structure): Расстояние по координатной оси Z между GRP и самой нижней точкой поворотной платформы |
|
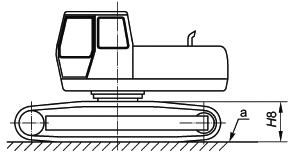
H8 | высота гусеничного движителя (crawler tracks height): Расстояние по координатной оси Z между GRP и самой высшей точкой гусеничного движителя |
|
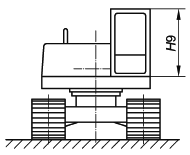
H9 | высота кабины (cab height): Расстояние по координатной оси Z между платформой поворотной части и самой высшей точкой кабины |
|
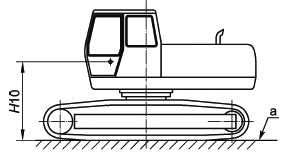
H10 | высота центра оси поворота стрелы (height boom-pivot point): Расстояние по координатной оси Z между GRP и центром оси поворота стрелы в сборе |
|
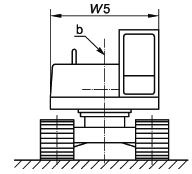
W5 | габаритная ширина поворотной платформы (upper structure overall width): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через крайние точки на сторонах поворотной платформы |
|
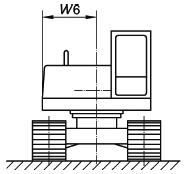
W6 | расстояние от оси вращения поворотной платформы до правой/левой стороны (right/left side upper structure distance from axis of rotation): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими соответственно через ось вращения и крайнюю правую/левую боковую точку поворотной платформы |
|
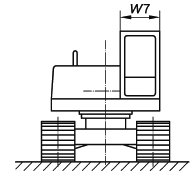
W7 | габаритная ширина кабины (cab width overall): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные боковые точки с каждой стороны кабины |
|
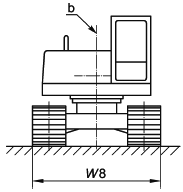
W8 | габаритная ширина шасси (undercarriage overall width): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные точки на сторонах шасси |
|
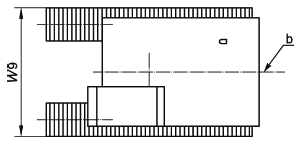
W9 | максимальная ширина с узкими или широкими гусеницами (maximum width with track extended or retracted): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через самые удаленные точки гусеничного движителя, для широких гусениц, или расстояние по координатной оси Y между двумя плоскостями Y, проходящими через наружные поверхности гусеничного движителя, для узких гусениц |
|
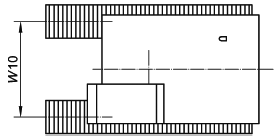
W10 | размер колеи с узкими или широкими гусеницами (track gauge with track extended or retracted): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через середины зубьев ведущих колес |
|
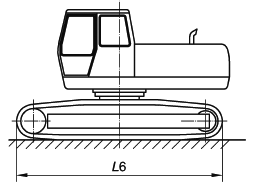
L6 | габаритная длина гусеничного движителя (crawler overall length): Расстояние по координатной оси X между двумя плоскостями X, проходящими через крайние точки на передней и задней частях гусеничного движителя |
|
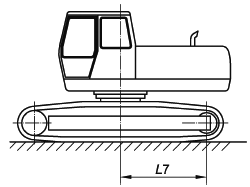
L7 | расстояние от оси вращения до оси ведущего колеса (sprocket axis to axis of rotations): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через ось ведущего колеса и ось вращения |
|
L8 | вылет поворотной платформы от оси вращения (upper structure rearmost distance from axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через крайнюю заднюю точку поворотной платформы и ось вращения |
|
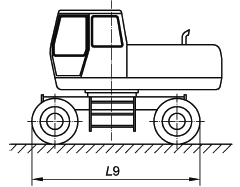
L9 | габаритная длина шасси (undercarriage overall length): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через крайние точки на передней и задней частях шасси |
|
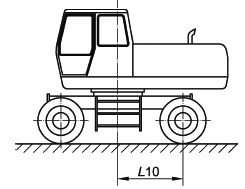
L10 | расстояние от заднего колеса до оси вращения (rear axle to axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через центр заднего колеса и ось вращения |
|
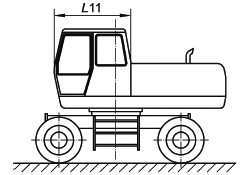
L11 | габаритная длина кабины (cab overall length): Расстояние по координатной оси X между двумя плоскостями X, проходящими через крайние точки на передней и задней частях кабины |
|
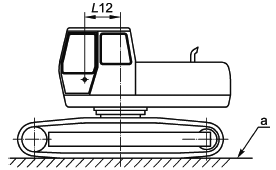
L12 | расстояние от оси вращения до оси поворота стрелы (distance from axis of rotation to boom pivot point): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через ось поворота стрелы и ось вращения |
|
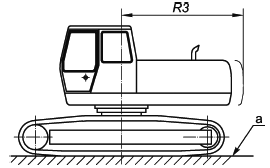
R3 | радиус поворота (задней части) (swing (rear-end) radius): Расстояние по координатной оси Y (плоскость Z) между осью вращения и крайней задней точкой поворотной платформы |
|
| ||

Приложение B
(обязательное)
Размерные характеристики рабочего/сменного оборудования
В настоящем приложении определены размерные характеристики рабочего и сменного оборудования, применяемого с канатными экскаваторами, и установлены их условные обозначения. Пояснения определений с использованием трехмерной системы координат и системы условных обозначений, использованной для идентификации размерных характеристик рабочего и сменного оборудования, см. в ISO 6746-2.
Таблица B.1
Условное обозначение | Термин и определение | Рисунок |
HH1 | высота подъема при применении подъемного оборудования (lifting height of lifting equipment application): Расстояние по координатной оси Z между GRP и осью вращения шкива крюка относительно достижения RR1 и конфигурации стрелы. |
|
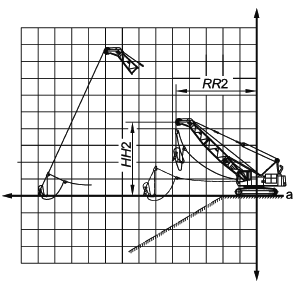
HH2 | высота подъема стрелы при применении драглайна (boom height of dragline equipment): Расстояние по координатной оси Z между GRP и режущей кромкой ковша относительно достижения RR2 и конфигурации стрелы |
|
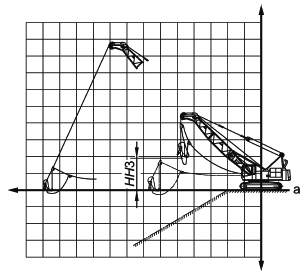
HH3 | максимальная высота выгрузки драглайна (maximum dumping height of dragline equipment): Расстояние по координатной оси Z между GRP и самой низкой точкой драглайна, когда ковш находится в самом высоком положении выгрузки относительно конфигурации стрелы |
|
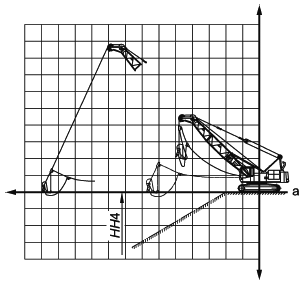
HH4 | максимальная глубина выемки (maximum digging depth of dragline equipment): Расстояние по координатной оси Z между GRP и самой нижней точкой, которая может быть достигнута при работе драглайна относительно конфигурации стрелы |
|
HH5 | высота стрелы при применении захвата (boom height of grab application): Расстояние по координатной оси Z между GRP и шарниром головки стрелы относительно достижения RR4 и конфигурации стрелы. |
|
HH6 | максимальная высота выгрузки грейфера при применении захвата (maximum dumping height of clamshell in drab application): Расстояние по координатной оси Z между GRP и самой нижней точкой грейфера в закрытом положении, когда грейфер находится в самом высоком положении выгрузки относительно конфигурации стрелы |
|
HH7 | Максимальная глубина выемки грейфером при применении захвата (maximum digging depth in grab application): Расстояние по координатной оси Z между GRP и режущей кромкой зубьев в самой нижней точке, которая может быть достигнута с открытым грейфером относительно конфигурации стрелы |
|
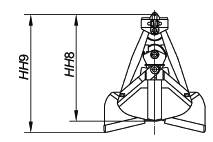
HH8 | высота закрытого грейфера (height of closed clamshell): Расстояние по координатной оси Z между двумя плоскостями Z, проходящими соответственно через шарнир грейфера и самую нижнюю точку захватов в закрытом положении |
|
HH9 | высота открытого грейфера (height of open clamshell): Расстояние по координатной оси Z между двумя плоскостями Z, проходящими соответственно через шарнир грейфера и самую нижнюю точку грейфера в открытом положении | |
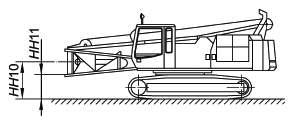
HH10 | высота шарнира нижней секции стрелы (pivot height of lower boom section): Расстояние по координатной оси Z между GRP и осью поворота нижней секции стрелы |
|
HH11 | расстояние от грунта до нижней секции стрелы в горизонтальном положении (ground clearance of lower boom section in horizontal position): Расстояние по координатной оси Z между GRP и нижней точкой секции стрелы, находящейся в горизонтальном положении | |
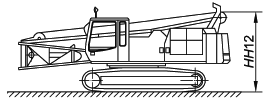
HH12 | транспортная/погрузочная высота с базовым оборудованием (transport/ shipping height with basic equipment): Расстояние по координатной оси Z между GRP и самой высокой точкой рабочего оборудования, находящегося в транспортном/погрузочном положении |
|
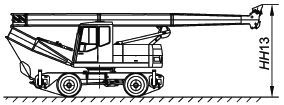
HH13 | габаритная высота головки стрелы в транспортном положении (overall height of boom head in transport position): Расстояние по координатной оси Z между GRP и самой высокой точкой головки стрелы в транспортном положении |
|
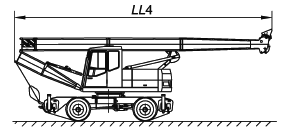
HH14 | габаритная высота в положении перемещения (overall height in travelling condition): Расстояние по координатной оси Z между GRP и самой высокой точкой машины в положении перемещения |
|
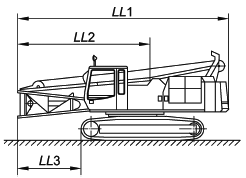
LL1 | габаритная длина в транспортном/погрузочном положении с базовым оборудованием (overall length in transport/shipping condition with basic equipment): Расстояние по координатной оси X между двумя плоскостями X, проходящими через самые выступающие точки в передней и задней частях машины в транспортном/погрузочном положении |
|
LL2 | вылет нижней секции стрелы от оси вращения (extension of the lower boom section from axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими через самые выступающие точки спереди и ось вращения в транспортном/отгрузочном состоянии | |
LL3 | вылет вперед нижней секции стрелы (front-end extension of the lover boom section): Расстояние по координатной оси X между двумя плоскостями X, проходящими через самые удаленные точки спереди нижней секции стрелы и спереди базовой машины в транспортном/погрузочном положении | |
LL4 | габаритная длина в положении перемещения (overall length in travelling condition): Расстояние по координатной оси X между двумя плоскостями X, проходящими через самые крайние точки спереди и сзади машины в положении перемещения |
|
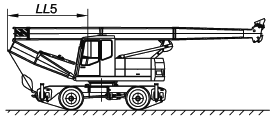
LL5 | расстояние спереди до центра рулевого колеса (front distance to steering wheel centre): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через центр рулевого колеса и самую удаленную вперед точку машины, включая рабочее оборудование в положении перемещения |
|
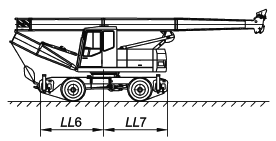
LL6 | расстояние от края переднего стабилизатора до оси вращения (front-end to axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через край переднего стабилизатора и ось вращения |
|
LL7 | расстояние от края заднего стабилизатора до оси вращения (rear-end to axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через край заднего стабилизатора и ось вращения | |
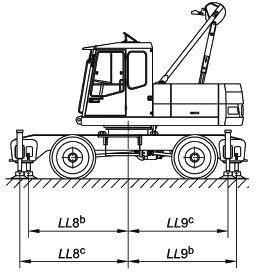
LL8 | вылет переднего стабилизатора относительно оси вращения (front pad centre to axis of rotation): Расстояние no координатной оси X между двумя плоскостями X, проходящими соответственно через ось вращения и осевую линию переднего левого стабилизатора |
|
LL8 | вылет переднего стабилизатора относительно оси вращения (front pad centre to axis of rotation): Расстояние no координатной оси X между двумя плоскостями X, проходящими соответственно через ось вращения и осевую линию переднего правого стабилизатора | |
LL9 | вылет заднего стабилизатора относительно оси вращения (rear pad centre to axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через ось вращения и осевую линии заднего правого стабилизатора | |
LL9 | вылет заднего стабилизатора относительно оси вращения (rear pad centre to axis of rotation): Расстояние по координатной оси X между двумя плоскостями X, проходящими соответственно через ось вращения и осевую линии заднего левого стабилизатора | |
RR1 | досягаемость при применении подъемного оборудования (reach of lifting equipment application): Расстояние по координатной оси X (плоскость Z) между осью вращения и осью блока крюка в зависимости от высоты подъема HH1 и конфигурации стрелы |
|
RR2 | досягаемость при применении драглайна (reach of dragline equipment application): Расстояние по координатной оси X (плоскость Z) между осью вращения и канатом драглайна в зависимости от высоты стрелы HH2 и конфигурации стрелы |
|
RR3 | максимальная досягаемость врезания при применении драглайна (maximum digging reach of dragline application): Расстояние по координатной оси X (плоскость Z) между осью вращения и режущей кромкой на GRP в зависимости от конфигурации стрелы |
|
RR4 | досягаемость при применении захвата (reach of grab application): Расстояние по координатной оси X (плоскость Z) между осью вращения и осью поворота нижней части режущей кромки относительно высоты стрелы HH5 и конфигурации стрелы |
|
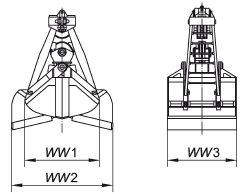
WW1 | длина закрытого захвата (length of closed grab): Расстояние в плоскости Z между самыми выступающими точками закрытого захвата |
|
WW2 | длина открытого захвата (length of open grab): Расстояние в плоскости Z между самыми выступающими точками режущих кромок или зубьев закрытого захвата | |
WW3 | наружная ширина захвата (outside width of grab): Расстояние между наиболее удаленными точками сторон захвата | |
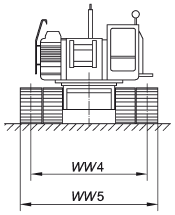
WW4 | габаритная ширина с шасси в сложенном положении (overall width with undercarriage in retracted position): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через наиболее удаленные точки шасси в сложенном положении |
|
WW5 | габаритная ширина с шасси в расширенном положении (overall width with undercarriage in extended position): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через наиболее удаленные точки шасси в расширенном положении | |
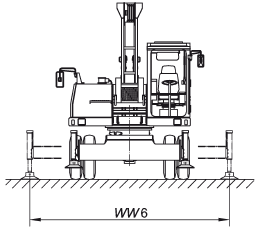
WW6 | габаритная ширина по осям опорных площадок стабилизаторов в максимально выдвинутом положении (overall width of stabilizer and supporting plates in max. extended position): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через осевые линии опорных площадок стабилизаторов |
|
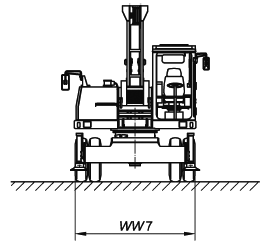
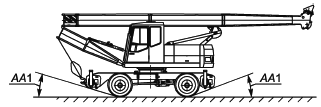
WW7 | габаритная ширина, включая стабилизаторы в положении движения (overall width including stabilizer at road travelling position): Расстояние по координатной оси Y между двумя плоскостями Y, проходящими через наиболее удаленные точки на сторонах машины в положении движения по дороге |
|
AA1 | угол свеса со стабилизатором (angle of approach with stabilizer): Угол в плоскости X между GRP и плоскостью, касательной к переднему стабилизатору, проходящей через самую нижнюю точку конструкции стабилизатора, которая ограничивает размах угла |
|
| ||


Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование межгосударственного стандарта |
ISO 6016 | - | * |
ISO 6746-1:2003 | - | * |
ISO 6746-2:2003 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. | ||
Библиография
[1] | ISO 3450:1996 | Earth-moving machinery - Braking systems of rubber-tyred machines - Systems and performance requirements and test procedures |
(Машины землеройные. Тормозные системы колесных машин. Требования к эффективности и методы испытаний) | ||
[2] | ISO 5010:1992 | Earth-moving machinery - Rubber-tyred machines - Steering requirements |
(Машины землеройные. Система рулевого управления колесных машин) | ||
[3] | ISO 6014:1986 | Earth-moving machinery - Determination of ground speed |
(Машины землеройные. Определение скорости движения) | ||
[4] | ISO 6015:1989 | Earth-moving machinery - Hydraulic excavators - Methods of measuring tool forces |
(Машины землеройные. Экскаваторы. Методы измерения усилий на рабочих органах) | ||
[5] | ISO 6165:2001 | Earth-moving machinery - Basic types - Vocabulary |
(Машины землеройные. Классификация. Термины и определения) | ||
[6] | ISO 9249:1997 | Earth-moving machinery - Engine test code - Net power |
(Машины землеройные. Правила испытаний двигателей. Полезная мощность) | ||
[7] | ISO 10265:1998 | Earth-moving machinery - Crawler machines - Performance requirements and test procedures for braking systems |
(Машины землеройные. Гусеничные машины. Требования к эффективности и методы испытаний тормозных систем) | ||
[8] | ISO 10567:1992 | Earth-moving machinery - Hydraulic excavator - Lift capacity |
(Машины землеройные. Экскаваторы гидравлические. Грузоподъемность) |
УДК 621.879.328:001.4(083.74)(476) | МКС 53.100 | IDT |
Ключевые слова: машины землеройные, канатные экскаваторы, базовая машина, рабочее оборудование, сменное оборудование, технические характеристики | ||
Редакция документа с учетом
изменений и дополнений подготовлена
{kind=link}