ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТР
71763— 2024
ПОДШИПНИКИ КАЧЕНИЯ ПРИБОРНЫЕ
Контроль момента трения методом выбега
Издание официальное
Москва Российский институт стандартизации 2024
ГОСТ Р 71763—2024
Предисловие
1 РАЗРАБОТАН Открытым акционерным обществом «OK-Лоза» (ОАО «OK-Лоза») и Федеральным государственным бюджетным учреждением «Российский институт стандартизации» (ФГБУ «Институт стандартизации»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 307 «Подшипники качения и скольжения»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 1 ноября 2024 г. № 1592-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
©Оформление. ФГБУ «Институт стандартизации», 2024
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 71763—2024
Содержание
1 Область применения..................................................................1
2 Нормативные ссылки..................................................................1
3 Термины и определения...............................................................2
4 Обозначения.........................................................................2
5 Точность измерений...................................................................3
6 Средства контроля....................................................................3
6.1 Описание установки...............................................................3
6.2 Описание работы установки........................................................5
7 Условия контроля.....................................................................5
7.1 Требования к контролируемому подшипнику и шарикоподшипниковой опоре................5
7.2 Требования к установке............................................................6
7.3 Условия окружающей среды........................................................6
8 Подготовка к контролю................................................................6
9 Порядок проведения контроля..........................................................7
10 Обработка результатов контроля.......................................................8
11 Требования к персоналу..............................................................8
Приложение А (справочное) Расчет массы и момента инерции маховика........................9
Приложение Б (обязательное) Контроль момента трения по времени и числу оборотов...........10
Приложение В (обязательное) Контроль момента трения по времени выбега....................11
III
ГОСТ Р 71763—2024
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ПОДШИПНИКИ КАЧЕНИЯ ПРИБОРНЫЕ
Контроль момента трения методом выбега
Instrument precision rolling bearings.
Frictional moment inspection by coast down method
Дата введения — 2025—01—01
1 Область применения
Настоящий стандарт распространяется на приборные шариковые радиальные и радиально-упорные подшипники качения (далее — подшипники) и шарикоподшипниковые опоры с номинальным наружным диаметром до 35 мм и устанавливает основную и альтернативные методики контроля динамического момента трения методом выбега при вертикальном положении оси подшипника и действии постоянной осевой нагрузки (далее — момента трения).
Методика контроля, описанная в настоящем стандарте, может быть применена для проверки подшипников и шарикоподшипниковых опор с номинальным наружным диаметром более 35 мм по согласованию между потребителем и изготовителем.
Настоящий стандарт применяется при изготовлении, контроле, подтверждении соответствия требованиям нормативной или технической документации подшипников и шарикоподшипниковых опор.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 8.050 Государственная система обеспечения единства измерения. Нормальные условия выполнения линейных и угловых измерений
ГОСТ 1805 Масло приборное МВП. Технические условия
ГОСТ 6309 Нитки швейные хлопчатобумажные и синтетические. Технические условия
ГОСТ 9392 Уровни рамные и брусковые. Технические условия
ГОСТ 10121 Масло трансформаторное селективной очистки. Технические условия
ГОСТ 11630 Приборы полупроводниковые. Общие технические условия
ГОСТ 16504 Система государственных испытаний продукции. Испытания и контроль качества продукции. Основные термины и определения
ГОСТ 24955 Подшипники качения. Термины и определения
ГОСТ 25346 (ISO 286-1:2010) Основные нормы взаимозаменяемости. Характеристики изделий геометрические. Система допусков на линейные размеры. Основные положения, допуски, отклонения и посадки
ГОСТ 27674 Трение, изнашивание и смазка. Термины и определения
ГОСТ OIML R 111-1 Государственная система обеспечения единства измерений. Гири классов Е^ Е2, ^1’ ^2’ М^ М1_2, М2, М2_3 и М3. Часть 1. Метрологические и технические требования
ГОСТ Р 8.818 Государственная система обеспечения единства измерений. Средства измерений и системы измерительные виртуальные. Общие положения
ГОСТ Р 51841 (МЭК 61131-2—92) Программируемые контроллеры. Общие технические требования и методы испытаний
ГОСТ Р 57405 Приборы пьезоэлектрические. Классификация и система условных обозначений
Издание официальное
1
ГОСТ Р 71763—2024
ГОСТ Р МЭК 61747-1-1 Устройства дисплейные жидкокристаллические. Часть 1-1. Общие положения. Общие технические требования
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 16504, ГОСТ 24955, ГОСТ 27674, а также следующие термины с соответствующими определениями:
3.1 выбег: Процесс вращения подшипника от окончания действия внешнего момента силы до полной остановки.
3.2 диаметр центровой окружности шариков: Диаметр окружности, проходящей через центры шариков подшипника.
3.3 динамический момент трения: Момент трения, возникающий при относительной частоте вращения колец не менее 1 об/с.
3.4 измерительная установка момента трения; установка: Средство измерительного контроля для позиционирования, нагружения, вращения и контроля момента трения подшипника.
3.5 момент вращения: Момент, необходимый для обеспечения удержания от вращения одного из колец подшипника, когда другое вращается.
3.6 момент трения: Момент, необходимый для обеспечения преодоления сил трения, возникающих в подшипнике при перемещении поверхностей трения, который может быть определен как момент вращения и момент трогания.
3.7 момент трогания: Момент, необходимый для обеспечения начала вращения одного из колец подшипника, когда другое неподвижно.
3.8 осевая нагрузка: Нагрузка, действующая на подшипник в осевом направлении.
4 Обозначения
В настоящем стандарте применены обозначения, указанные в таблицах 1 и 2.
Таблица 1 — Обозначение физических величин
Обозначение | Описание | |
величины | единицы измерения | |
В pw | мм | Диаметр центровой окружности шариков |
мм | Диаметр внутренней цилиндрической поверхности маховика | |
Он | мм | Диаметр наружной цилиндрической поверхности маховика |
О0 | мм | Диаметр отверстия в торцевой поверхности маховика под крепление маховика на оправке измерительной установки |
f | Гц | Частота колебаний кварцевого генератора |
д | мм/с2 | Стандартное ускорение свободного падения д = 9806,65 мм/с2 |
h | мм | Толщина стенки маховика |
2
ГОСТ Р 71763—2024
Окончание таблицы 1
Обозначение | Описание | |
величины | единицы измерения | |
J | кг • м2 | Момент инерции маховика |
М | Н • мм | Момент трения |
Ч | Н • мм | Верхний предельный момент трения |
™г | г | Масса гири |
г | Масса маховика | |
п | оборот | Число оборотов маховика |
N | импульс | Число импульсов кварцевого генератора |
R | мм | Радиус намотки маховика |
S | мм | Глубина внутренней части маховика |
t | с | Время измерения |
^н | с | Нижнее предельное время выбега |
Ф | рад | Угол намотки в один оборот нити, ср = 2л |
Nn | об-1 | Число импульсов кварцевого генератора за один оборот маховика |
% | об/с | Текущая частота вращения (средняя частота вращения за один оборот маховика) |
Таблица 2 — Обозначения, применяемые в схемах
Обозначение | Описание |
Соединение с источником питания | |
Функциональная связь между элементами с указанием направления передачи сигнала (информации) |
5 Точность измерений
5.1 Погрешность метода измерения момента трения подшипников и подшипниковых опор включает:
- погрешность, связанную с неточностью монтажа подшипников или шарикоподшипниковых опор на измерительную установку, неточностью монтажа всех приспособлений на измерительную установку;
- погрешность определения переменных (момента инерции маховика, число импульсов генератора и т. д.), необходимых для вычисления момента трения по результатам контроля;
- погрешность отсчетного устройства и блока контроллера;
- геометрические параметры приспособлений, предназначенных для крепления подшипников или шарикоподшипниковых опор на измерительную установку, для их вращения.
5.2 Общая погрешность метода при условии, что погрешность отсчетного устройства и блока контроллера не будет превышать ±3 %, составляет ±13 % от значения измеряемого момента трения.
6 Средства контроля
6.1 Описание установки
6.1.1 Установка состоит из механической части* и блока контроллера и включает в себя:
- маховик;
* На предприятиях — изготовителях шариковых приборных подшипников применяются измерительные установки типа С-24 и ИМТ, механическая часть которых аналогична схемам, представленным в настоящем стандарте.
3
ГОСТ Р 71763—2024
- механическое приспособление (сменная ось) для крепления подшипника или шарикоподшипниковой опоры в установке;
- оправку для крепления маховика на подшипнике, шарикоподшипниковой опоре;
- оптопару отражающего типа по ГОСТ 11630;
- кварцевый генератор по ГОСТ Р 57405;
- программируемый контроллер по ГОСТ Р 51841;
- панель управления (периферийное устройство по ГОСТ Р 51841);
- сегментный дисплей по ГОСТ Р МЭК 61747-1-1.
Примечание — Вместо оптопары по ГОСТ 11630 допускается применение других компонентов, обеспечивающих достоверное определение частоты вращения маховика.
6.1.2 Схема механической части установки под подшипник приведена на рисунке 1, под шарикоподшипниковую опору — на рисунке 2.
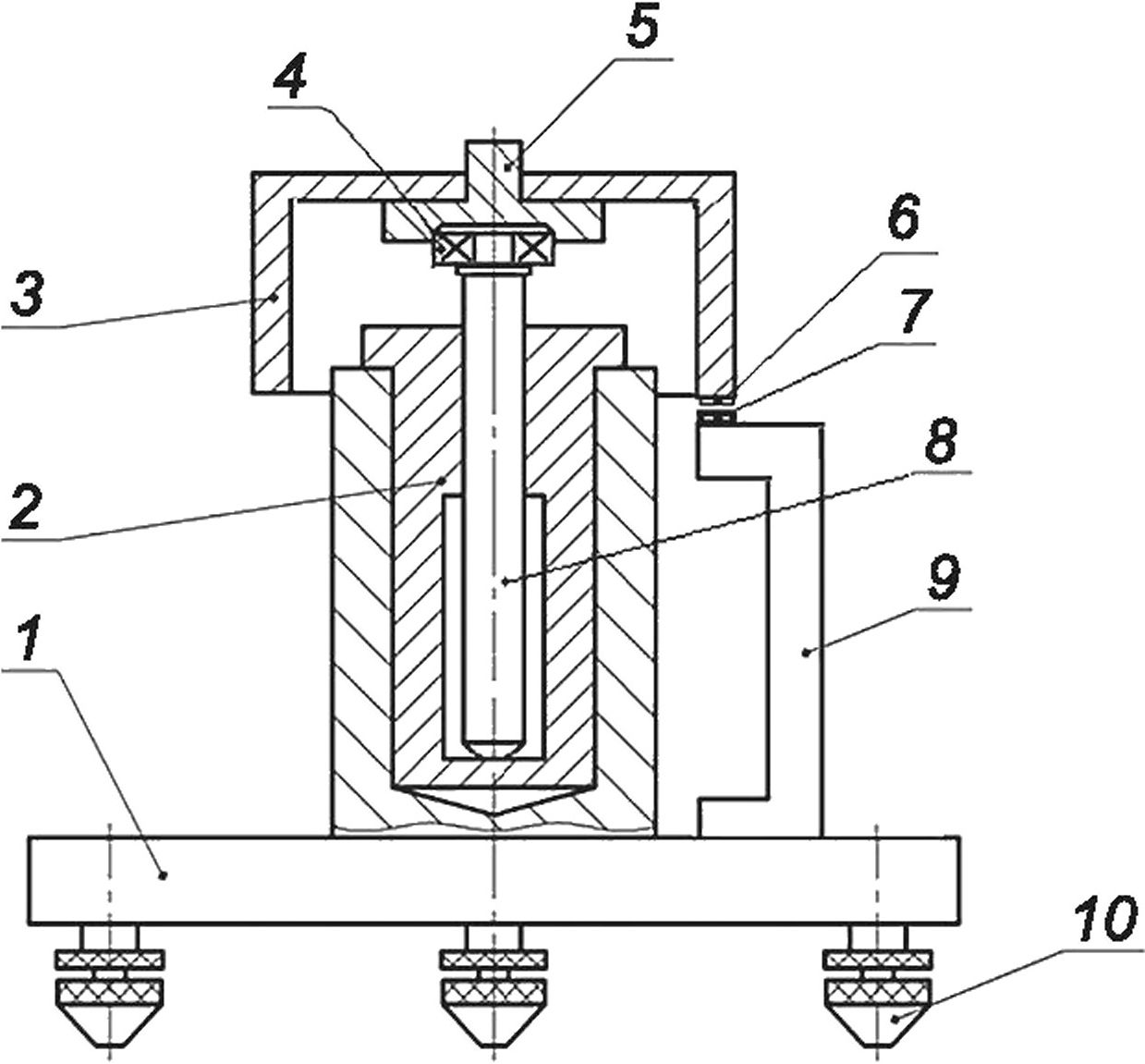
1 — плита; 2 — втулка; 3 — маховик; 4 — подшипник; 5 — оправка; 6 — светоотражатель/метка; 7 — оптопара/чувствительный элемент (датчик); 8 — сменная ось с посадочным местом под подшипник; 9 — стойка; 10 — опорный винт
Рисунок 1 — Схема механической части установки под подшипник
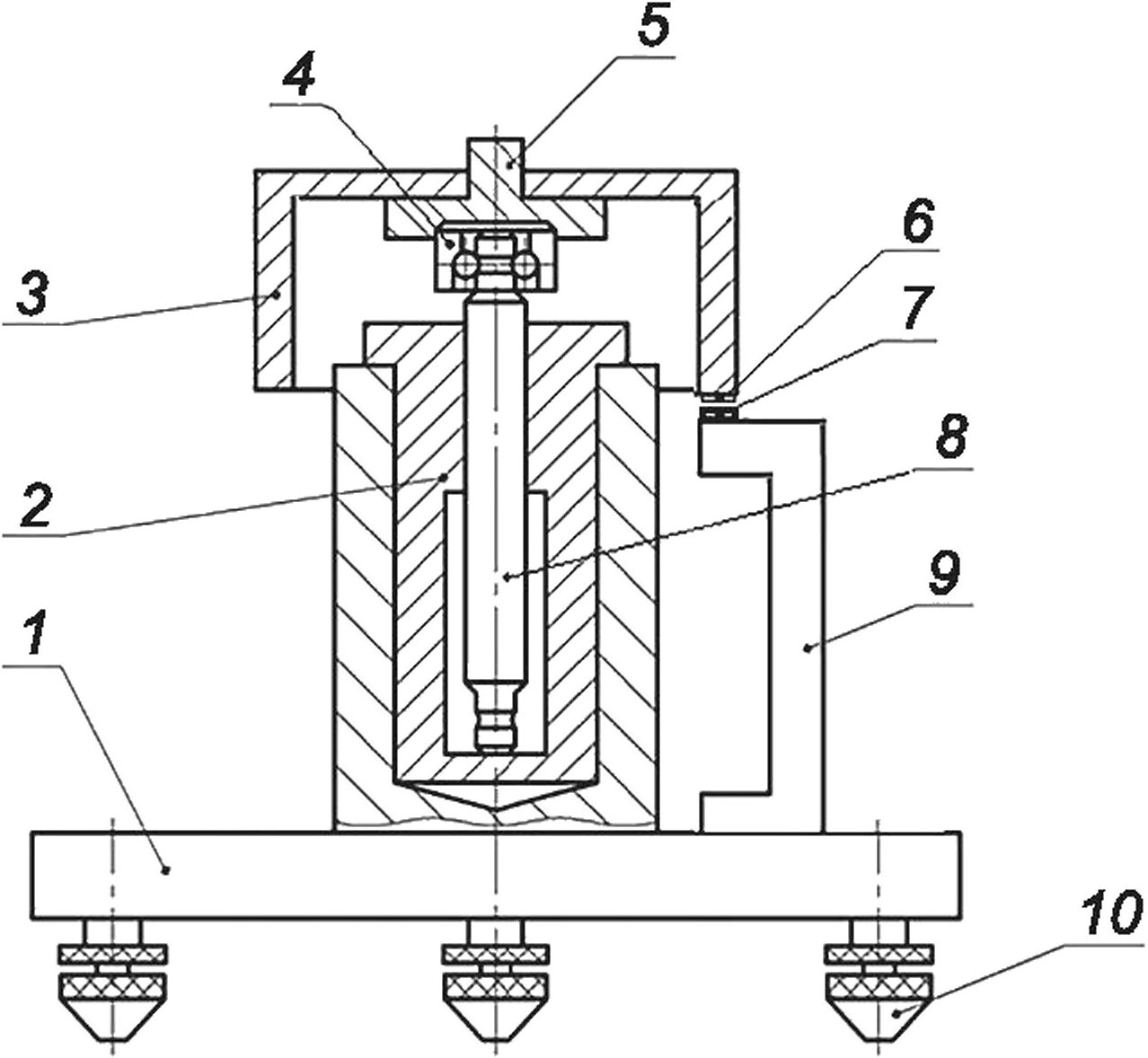
1 — плита; 2 — втулка; 3 — маховик; 4 — шарикоподшипниковая опора; 5 — оправка; 6 — светоотражатель/метка; 7 — оптопара/ чувствительный элемент (датчик); 8 — валик шарикоподшипниковой опоры; 9 — стойка; 10 — опорный винт
Рисунок 2 — Схема механической части установки под шарикоподшипниковую опору
4
ГОСТ Р 71763—2024
6.1.3 Функциональная схема может быть реализована в виде виртуальной измерительной системы по ГОСТ Р 8.818 на любой универсальной электронной вычислительной машине. Функциональная схема блока контроллера установки представлена на рисунке 3.
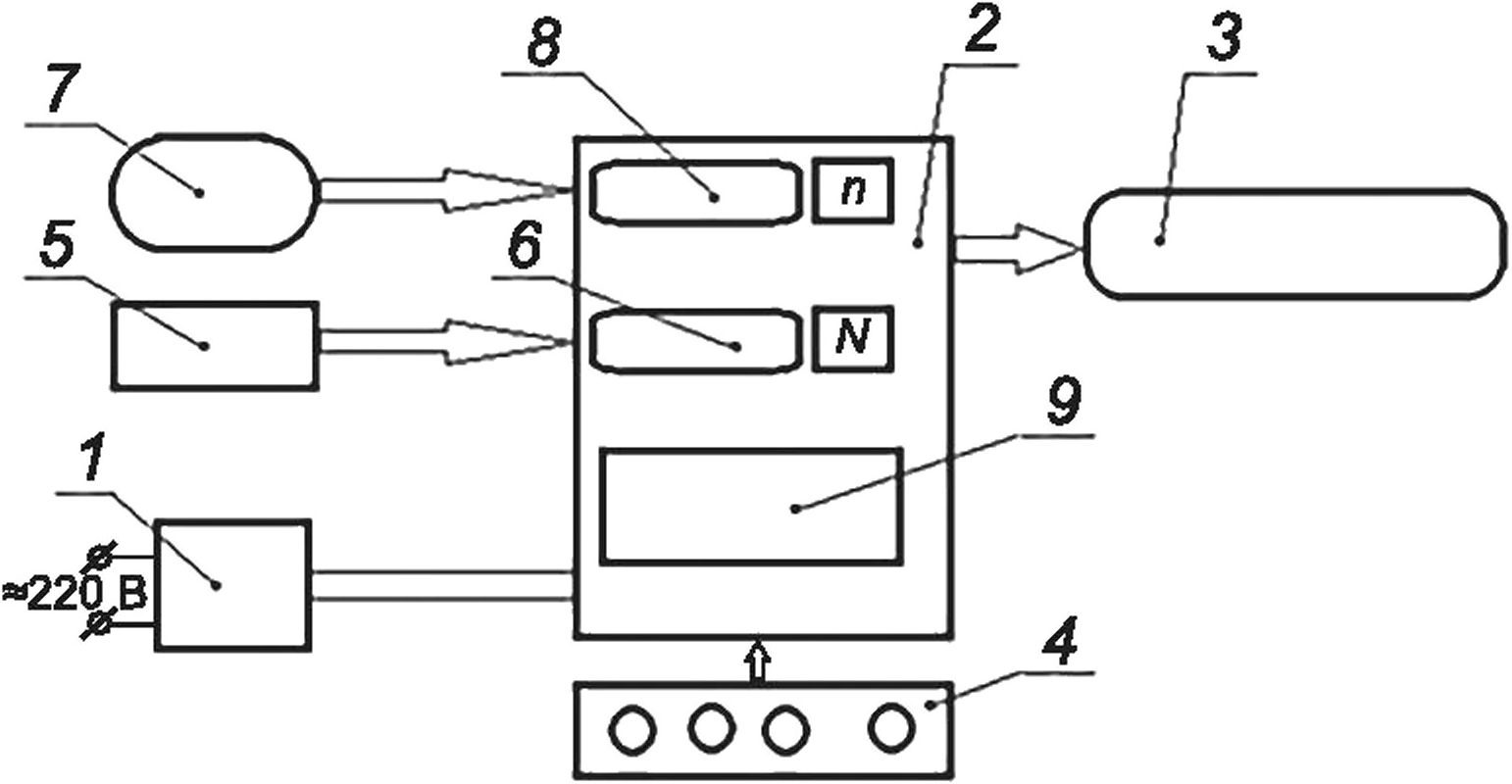
1 — источник питания; 2 — программируемый контроллер; 3 — буквенно-цифровой индикатор или дисплей; 4 — панель управления; 5 — кварцевый генератор; б — счетчик импульсов; 7 — оптопара/чувствительный элемент (датчик); 8 — счетчик оборотов; 9 — модуль вычисления
Рисунок 3 — Функциональная схема блока контроллера установки
6.2 Описание работы установки
6.2.1 Маховик вращается вместе с наружным кольцом подшипника или шарикоподшипниковой опоры. Когда светоотражатель/метка (см. рисунки 1 и 2, позиция 6) проходит над оптопарой/чувстви-тельным элементом (датчиком) (см. рисунки 1—3, позиция 7), оптопара/чувствительный элемент (датчик) вырабатывает импульс, поступающий на счетчик оборотов (см. рисунок 3, позиция 8).
Примечание — Конструкция маховика, оправки для его установки и сменной оси для установки подшипников может иметь конфигурацию, отличную от представленной на рисунке 1, для придания вращения внутреннему кольцу подшипников при проведении контроля. При этом требования к геометрическим параметрам сменной оси и оправки должны быть аналогичны требованиям, приведенным в 7.2.
6.2.2 После завершения каждого очередного оборота модуль вычисления (см. рисунок 3, позиция 9) определяет среднюю частоту вращения за этот оборот по формуле
&n~N„- (1)
При снижении средней частоты вращения до значения не более 1,05 об/с счетчик импульсов и счетчик оборотов начинают новый отсчет от нуля до тех пор, пока средняя частота вращения не снизится до значения менее 1 об/с.
6.2.3 Модуль вычисления (см. рисунок 3, позиция 9) определяет момент трения по формуле
М = 10
-9 4яЛп И
(2)
Примечание — Результат вычисления момента трения не зависит от первоначальной частоты вращения маховика, поскольку при равнозамедленном вращении N2 пропорционально п.
6.2.4 Текущие и окончательные значения числа оборотов, средней частоты вращения и момента трения отображаются на буквенно-цифровом индикаторе или дисплее.
7 Условия контроля
7.1 Требования к контролируемому подшипнику и шарикоподшипниковой опоре
7.1.1 Перед проведением контроля момента трения подшипники и шарикоподшипниковые опоры должны быть промыты и размагничены в соответствии с технической документацией предприятия-изготовителя.
5
ГОСТ Р 71763—2024
7.1.2 Подшипники и шарикоподшипниковые опоры смазывают одной-двумя каплями масла приборного МВП по ГОСТ 1805 или масла трансформаторного селективной очистки по ГОСТ 10121 со стержня, заточенного под углом 45° ± 1°. Подшипник и шарикоподшипниковую опору с номинальным диаметром отверстия до 4 мм смазывают со стержня диаметром (1,0 ± 0,1) мм, остальные подшипники и шарикоподшипниковые опоры — со стержня диаметром (2,0 ± 0,1) мм. Затем подшипник и шарикоподшипниковую опору медленно проворачивают на два оборота в обе стороны для равномерного распределения смазочного масла.
7.2 Требования к установке
7.2.1 Масса маховика должна быть в следующих пределах:
(75,0 ±1,5) г.............................. при Dpw до 4 мм;
(300,0 ± 6,0) г.............................. » » св. 4 мм.
7.2.2 По согласованию с заказчиком допускается применение маховика другой массы, которая одновременно должна быть согласована с допустимыми значениями момента трения.
7.2.3 Конструкция маховика должна обеспечивать положение центра масс маховика ниже нижних торцов контролируемого подшипника или ниже нижних торцов установленного наружного кольца шарикоподшипниковой опоры. Для этого маховик изготавливают в виде металлического стакана, в закрытой торцовой поверхности которого имеется отверстие под диаметр оправки. Крепление маховика на оправке осуществляется либо с помощью гайки, либо с помощью резьбового соединения непосредственно в соединительном отверстии маховика.
7.2.4 Допуск параллельности упорной поверхности заплечика сменной оси с посадочным местом под подшипник (см. рисунок 1, позиция 8) или торца валика шарикоподшипниковой опоры (см. рисунок 2, позиция 8) относительно верхней поверхности плиты (см. рисунки 1, 2, позиция 1) должен быть не более 1 мкм.
7.2.5 Класс допуска цилиндрической посадочной поверхности сменной оси (см. рисунок 1, позиция 8) — js5® по ГОСТ 25346, т. е. с учетом требования прилегания.
7.2.6 Класс допуска цилиндрической посадочной поверхности отверстия оправки — Н6© по ГОСТ 25346, т. е. с учетом требования прилегания.
7.2.7 Момент инерции и массу каждого маховика указывают в технологической документации на изготовление и контроль конкретного подшипника.
7.2.8 Способы расчета массы и момента инерции маховика приведены в приложении А.
7.2.9 Требования к светоотражателю/метке — в соответствии с технической документацией на применяемую оптопару/чувствительный элемент (датчик).
7.3 Условия окружающей среды
7.3.1 Требования к характеристикам вибрации основания, на котором расположена измерительная установка — по ГОСТ 8.050.
7.3.2 Относительная влажность воздуха — не более 65 %.
7.3.3 Температура окружающей среды — от 18 °C до 25 °C.
8 Подготовка к контролю
8.1 Для контроля момента трения подшипника или шарикоподшипниковой опоры следует выбрать и установить соответствующие механические приспособления (сменная ось, оправка, втулка) (см. рисунок 1 или 2) по размеру контролируемого подшипника или шарикоподшипниковой опоры.
8.2 При помощи опорных винтов (см. рисунки 1 и 2, позиция 10) необходимо отрегулировать горизонтальность верхней поверхности плиты с отклонением от горизонта не более чем ±30'.
Проверка горизонтальности осуществляется уровнями брусковыми по ГОСТ 9392 в двух взаимно перпендикулярных направлениях либо непосредственно по верхней поверхности плиты (см. рисунки 1 и 2, позиция 1), либо по специальной оправке, установленной на посадочной поверхности сменной оси (см. рисунок 1, позиция 8).
8.3 Включают питание блока контроллера и дают ему прогреться согласно эксплуатационной документации.
6
ГОСТ Р 71763—2024
8.4 При необходимости переналадить параметры скорости вращения начала отсчета и окончания отсчета. Скорость вращения при первоначальной настройке должна соответствовать следующим значениям:
1,05 об/с.............................. начало отсчета;
1,00 об/с.............................. окончание отсчета.
8.5 Смазывают подшипники или шарикоподшипниковые опоры в соответствии с 7.1.2. Допускается смазывание подшипника или шарикоподшипниковой опоры после монтажа на измерительную установку, при этом проворачивание производят после монтажа маховика (см. 9.6).
9 Порядок проведения контроля
9.1 Подшипник или шарикоподшипниковую опору необходимо установить на измерительную установку. Второй ряд шариков с наружным кольцом шарикоподшипниковой опоры временно демонтируют.
9.2 Радиально-упорный подшипник монтируют узким торцом внутреннего кольца вверх, а узким торцом наружного кольца — вниз. Радиальный подшипник с канавками для заполнения монтируют канавкой внутреннего кольца вверх, канавкой наружного кольца — вниз. Радиальный подшипник с упорным бортом монтируют бортом вниз, в случае если при контроле наружное кольцо вращается вместе с маховиком, и бортом вверх, если при контроле внутреннее кольцо вращается вместе с маховиком.
9.3 Радиальный подшипник без упорного борта и без канавки для заполнения устанавливают произвольной стороной, а затем — противоположной.
9.4 Контроль момента трения шарикоподшипниковой опоры проводят раздельно для каждого ряда шариков валика (см. рисунок 2, позиция 8).
9.5 Маховик с оправкой необходимо смонтировать на подшипник или шарикоподшипниковую опору. При контроле подшипников с упорным бортом маховик монтируют с учетом его опоры на опорную поверхность упорного борта.
9.6 Если смазывание проводят после монтажа на измерительную установку, маховик вместе с оправкой и наружным кольцом контролируемого подшипника или валиком шарикоподшипниковой опоры вручную поворачивают на два оборота в одну сторону, а затем в другую — для равномерного распределения смазочного масла по поверхностям трения.
9.7 Вручную придают вращение маховику. Контролируют по дисплею, что приданная скорость вращения превышает 1,05 об/с. Если скорость ниже этого значения, останавливают вращение, сбрасывают показания и придают большую скорость вращения.
9.8 Окончательное значение момента трения заносят в протокол и сравнивают с верхним предельным моментом трения.
9.9 Повторяют 9.7 и 9.8, изменив направление вращения на противоположное.
9.10 Подшипники или шарикоподшипниковые опоры, забракованные при контроле момента трения, должны быть размагничены, промыты, смазаны и подвергнуты повторному контролю. Подшипники и шарикоподшипниковые опоры, не прошедшие повторный контроль, подвергают размагничиванию, промывают, смазывают и повторяют испытания. Все подшипники и шарикоподшипниковые опоры, не прошедшие третий контроль момента трения, следует считать окончательно забракованными.
9.11 Объем контроля подшипников и шарикоподшипниковых опор из партии по параметру момента трения — в соответствии с нормативной или технической документацией на подшипники и шарикоподшипниковые опоры.
9.12 Описанный в настоящем разделе метод контроля является основным, поскольку позволяет получать результат измерения автоматически и непосредственно, без дополнительных расчетов, с установленной погрешностью.
9.13 Альтернативные методы контроля момента трения с получением числового результата с помощью расчета — в соответствии с приложениями Б и В. Метод контроля в соответствии с приложением В может быть также использован в качестве способа сортировки по признаку «годный/негодный». При этом погрешность альтернативных методов при условии подбора отсчетного устройства измерения времени с погрешностью не более ±3 %, не превышает погрешность основного метода и составляет ±13 % от значения измеряемого момента трения.
7
ГОСТ Р 71763—2024
10 Обработка результатов контроля
Результат контроля оформляют в виде протокола, в котором указывают:
- полное условное обозначение подшипника или шарикоподшипниковой опоры;
- верхний предел момента трения Мв;
- массу маховика тм;
- индивидуальный номер контролируемого подшипника или шарикоподшипниковой опоры;
- значение момента трения М, полученное при контроле;
- заключение (годен/негоден);
- дату и место проведения контроля;
- фамилию и подпись контролера.
11 Требования к персоналу
К выполнению измерений и обработке их результатов допускают персонал, прошедший обучение и соблюдающий требования эксплуатационной документации на средства измерений, измерительные установки, вспомогательные устройства и требования настоящего стандарта.
8
ГОСТ Р 71763—2024
Приложение А (справочное)
Расчет массы и момента инерции маховика
А.1 Размеры маховика в миллиметрах указаны на рисунке А.1.
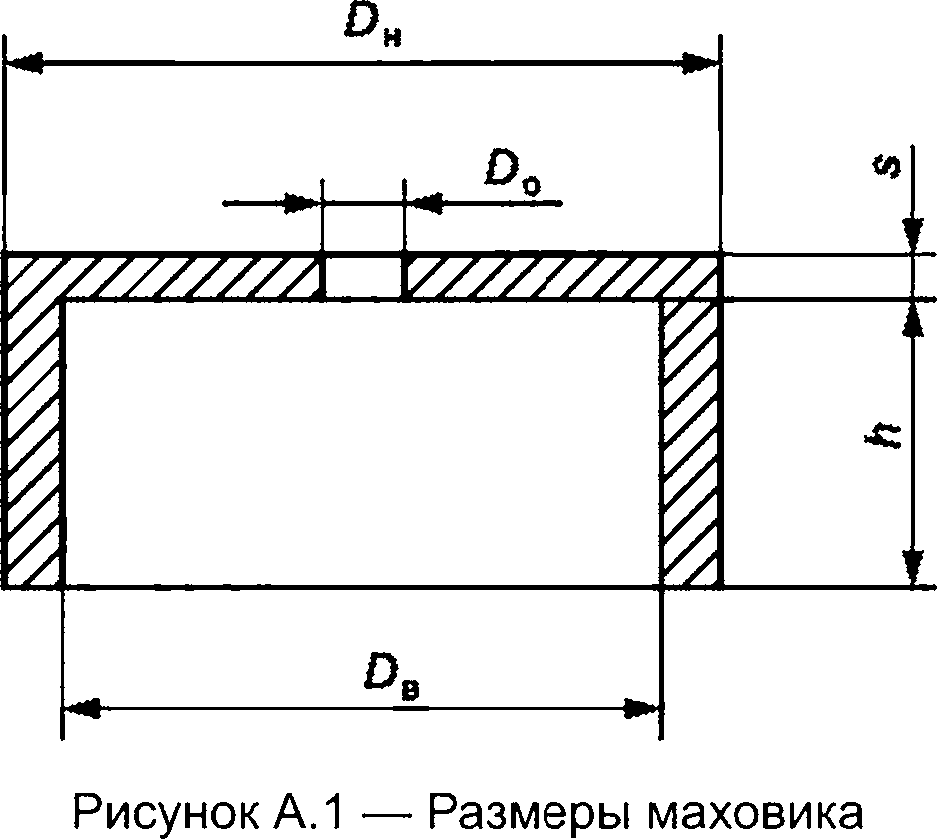
А.2 Массу маховика тм, г, рассчитывают по формуле
^ ^O-S^Dj-D^S+^-D^ft],
(А.1)
где р — плотность материала маховика, г/см3.
А.З Момент инерции маховика J, гмм2, рассчитывают по формуле
j=^ЖО^ -Do)s+(^ “^Н
(А.2)
9
ГОСТ Р 71763—2024
Приложение Б (обязательное)
Контроль момента трения по времени и числу оборотов
Б.1 Для контроля применяют механическую часть установки (см. рисунки 1 и 2, за исключением позиций 6 и 7). Для подсчета числа оборотов на боковой поверхности маховика (см. рисунки 1 и 2, позиция 3) и верхней поверхности стойки (см. рисунки 1 и 2, позиция 9) должны быть нанесены по одной риске.
Б.2 Для измерения времени применяют электронный или механический секундомер любого класса точности.
Б.З Условия контроля — в соответствии с разделом 7 за исключением 7.2.9.
Б.4 Подготовка к контролю — в соответствии с разделом 8, за исключением 8.3 и 8.4.
Б.5 Подшипник или шарикоподшипниковую опору и маховик с оправкой монтируют на установку в соответствии с 9.1—9.6.
Б.6 Вручную придают вращение маховику. Одновременно запускают отсчет времени секундомером и начинают отсчет числа оборотов маховика. Маховик должен совершить не менее 15 оборотов.
Б.7 По окончании вращения или по достижении 20 оборотов останавливают секундомер. Фиксируют в протоколе время и число оборотов. Вычисляют момент трения по формуле
М = 10“9^^. (Б.1)
Примечание — Результат вычисления момента трения не зависит от первоначальной частоты вращения маховика, поскольку при равнозамедленном вращении t2 пропорционально п.
Фиксируют значение момента трения в протоколе, сравнивают с верхним пределом момента трения.
Б.8 Повторяют Б.5, Б.6 и Б.7, изменив направление вращения на противоположное.
Б.9 Контроль момента трения проводят три раза. Результаты трех измерений заносят в протокол и сравнивают с верхним допустимым пределом момента трения. Каждое из трех измерений момента трения не должно превышать верхний допустимый предел момента трения.
За итоговый результат принимают среднее арифметическое трех измерений.
Б. 10 При необходимости проводят повторный контроль по Б.5—Б.7 с учетом 9.10.
Б. 11 Результаты контроля оформляют в виде протокола, в котором указывают:
- полное условное обозначение подшипника или шарикоподшипниковой опоры;
- верхний предел момента трения Мв;
- массу маховика тм;
- индивидуальный номер контролируемого подшипника или шарикоподшипниковой опоры;
- время измерения t и число оборотов маховика п за это время;
- значение момента трения М, полученное при контроле;
- заключение (годен/негоден);
- дату и место проведения контроля;
- фамилию и подпись контролера.
10
ГОСТ Р 71763—2024
Приложение В (обязательное)
Контроль момента трения по времени выбега
В.1 При контроле используют установку, конструкция которой представлена на рисунке В.1.
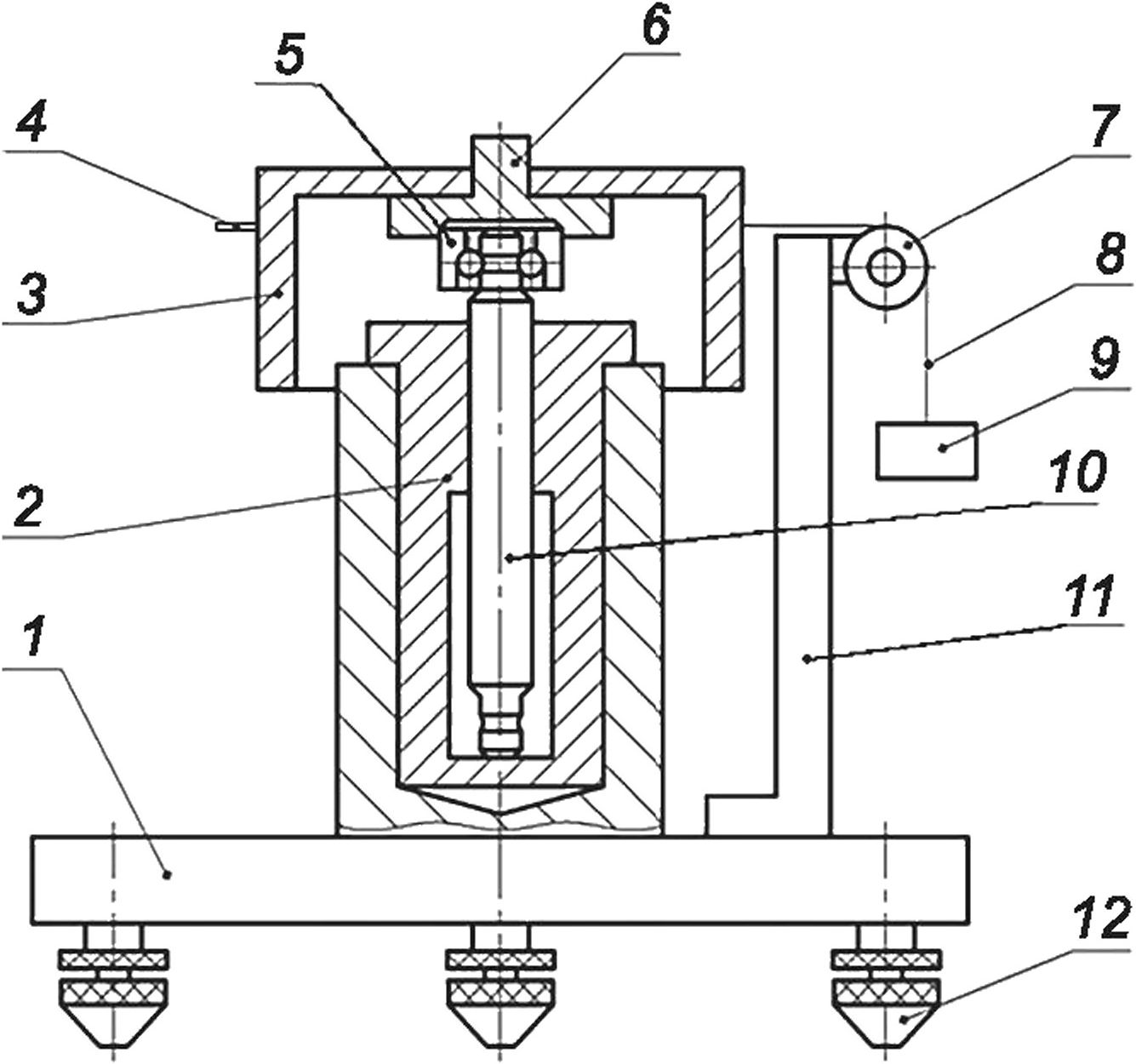
1 — плита; 2 — втулка; 3 — маховик; 4 — штифт крепления нити; 5 — шарикоподшипниковая опора; 6 — оправка; 7 — блок;
8 — нить; 9 — гиря; 10 — валик шарикоподшипниковой опоры; 11 — стойка; 12 — опорный винт
Рисунок В.1 — Схема установки с механическими приспособлениями под шарикоподшипниковую опору
Аналогичную схему применяют с механическими приспособлениями под подшипник. Отличие заключается в том, что вместо валика шарикоподшипниковой опоры (см. рисунок В.1, позиция 10) должна быть сменная ось.
В.2 Для измерения времени выбега применяют электронный или механический секундомер любого класса точности.
В.З Определяют по соответствующей конструкторской документации верхний предел момента трения Мв. При контроле момента трения по времени выбега вычисляют нижнее предельное время выбега по формуле
*н =10-6 /2Ф ^R
н Мв^ ^J + m^R2
(В.1)
В.4 Условия контроля — в соответствии с разделом 7 за исключением 7.2.9.
В.5 Подготовка к контролю — в соответствии с разделом 8, за исключением 8.3 и 8.4.
В.6 Из набора образцовых гирь (1; 1; 2; 5) • 10п кг с декадами от минус трех до нуля класса М по ГОСТ OIML R 111-1 подбирают гирю, масса которой должна обеспечить выбег маховика в течение не менее 40 с.
Допускается применение иных специальных грузов предприятия — изготовителя подшипников, имеющих погрешность не более погрешности вышеуказанных образцовых гирь и поверенных в установленном порядке.
В.7 Подшипник или шарикоподшипниковую опору и маховик с оправкой монтируют на измерительную установку в соответствии с 9.1—9.6.
В.8 Один конец нитки (х/б 40 «Экстра», глянцевая по ГОСТ 6309) закрепляют на штифте (см. рисунок В.1, позиция 4), наматывают один оборот по цилиндрической поверхности маховика, а ко второму концу, перекинутому через блок (см. рисунок В.1, позиция 7), прикрепляют гирю (см. рисунок В.1, позиция 9) и всю систему удерживают в состоянии покоя, для чего маховик слегка придерживают рукой. Плавно отводят руку. Маховик за счет гири (см. рисунок В.1, позиция 9) будет приведен во вращение. Пуск отсчета времени по секундомеру производят с момента освобождения маховика от нити. В момент полной его остановки останавливают секундомер. В протоколе фиксируют время выбега.
В.9 Измерения времени выбега подшипника или шарикоподшипниковой опоры проводят три раза. Результаты трех измерений заносят в протокол и сравнивают с нижним пределом времени выбега. Каждое из трех измерений времени выбега должно превышать нижний предел времени выбега.
За итоговый результат принимают среднее арифметическое трех измерений.
11
ГОСТ Р 71763—2024
В.10 При необходимости проводят повторный контроль по В.7—В.9 с учетом 9.10.
В. 11 Если при контроле стоит задача не только отсортировать подшипники или шарикоподшипниковые опоры на годные и негодные, но и определить его момент трения, то момент трения при каждом отдельном измерении вычисляют по формуле
Vj + mrR2
За окончательный результат принимают среднее арифметическое по трем измерениям.
В. 12 Результаты контроля оформляют в виде протокола, в котором указывают:
- полное условное обозначение подшипника или шарикоподшипниковой опоры;
- верхний предел момента трения Мв,
- нижний предел времени выбега tH;
- массу маховика тм;
- индивидуальный номер контролируемого подшипника или шарикоподшипниковой опоры;
- время выбега;
- значение момента трения М, полученное при контроле (при необходимости);
- заключение (годен/негоден);
- дату и место проведения контроля;
- фамилию и подпись контролера.
В.13 В случае, если описанный в данном приложении метод контроля используется в качестве способа сортировки по признаку «годный/негодный», протокол по В.12 допускается не оформлять.
УДК 621.822.7:006.354
ОКС 21.100.20
Ключевые слова: подшипники качения шариковые приборные, шарикоподшипниковые опоры, момент трения, измерительная установка для контроля момента трения, методы контроля, средства контроля
Редактор М.В. Митрофанова Технический редактор В.Н. Прусакова Корректор Р.А. Ментова Компьютерная верстка И.А. Налейкиной
Сдано в набор 07.11.2024. Подписано в печать 21.11.2024. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 1,86. Уч.-изд. л. 1,48.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}