ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
пнет
382— 2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТАНОВЛЕНИЕ ТРЕБОВАНИЙ К МИНИМАЛЬНОЙ ФУНКЦИОНАЛЬНОСТИ СИСТЕМ ПОМОЩИ ВОДИТЕЛЮ ПРИ УДЕРЖАНИИ ПОЛОСЫ ДВИЖЕНИЯ (LKAS), УСТАНАВЛИВАЕМЫХ НА ТРАНСПОРТНЫЕ СРЕДСТВА КАТЕГОРИЙ М и N, ОПРЕДЕЛЕНИЕ ЭКСПЛУАТАЦИОННЫХ ТРЕБОВАНИЙ К ДАННЫМ СИСТЕМАМ И ПРОЦЕДУР ИСПЫТАНИЙ
(ISO 11270:2014, NEQ)
Издание официальное
Стшдцлшфоя* 20»
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью «НИИ ИТС»
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 «Интеллектуальные транспортные системы»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому ре* гулированию и метрологии от 20 декабря 2019 г. № 59-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 11270 «Интеллектуальные транспортные системы. Системы помощи при удержании полосы (LKAS). Требования к производительности и процедурам испытаний» (ISO 11270 «Intelligent transport systems — Lane keeping assistance systems (LKAS) — Performance requirements and test procedures». NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16—2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 105005 Москва. Армянский пер., д. 9. стр.1 и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва. Китайгородский проезд, д. 7. стр. 1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе «Национальные стандарты» и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.rv)
© Стандартинформ. оформление. 2020
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и рас* пространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Термины и определения
3 Обозначения
4 Требования
4.1 Функциональность
4.2 Основной интерфейс водителя и возможности вмешательства
4.3 Минимальная функциональность
4.4 Эксплуатационные ограничения
4.5 Реакция на неисправности
5 Методы испытаний для оценки эксплуатационных характеристик
5.1 Условия окружающей среды
5.2 Условия испытательной трассы
5.3 Требования в отношении испытуемого транспортного средства
5.4 Установка и настройка испытуемой системы
5.5 Процедура испытаний
Приложение А (справочное) Пример трека для испытаний при движении по криволинейной траектории
Приложение Б (справочное) Национальная дорожная разметка в других странах
Библиография
Введение
Система удержания в пределах полосы движения (LKAS) предназначена для оказания помощи водителю в удержании транспортного средства в пределах текущей полосы движения. Система LKAS собирает информацию о положении транспортного средства в пределах полосы движения и по мере необходимости посылает команды исполнительным механизмам, чтобы повлиять на поперечное смещение транспортного средства. Кроме того, система LKAS предоставляет водителю информацию о состоянии.
В настоящем стандарте не обсуждаются вопросы, касающиеся конкретных требований, предъявляемых к работе датчиков обнаружения и их характеристикам или каналам связи для взаимодействующих систем.
ПНСТ 382—2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТАНОВЛЕНИЕ ТРЕБОВАНИЙ К МИНИМАЛЬНОЙ ФУНКЦИОНАЛЬНОСТИ СИСТЕМ ПОМОЩИ ВОДИТЕЛЮ ПРИ УДЕРЖАНИИ ПОЛОСЫ ДВИЖЕНИЯ (LKAS), УСТАНАВЛИВАЕМЫХ НА ТРАНСПОРТНЫЕ СРЕДСТВА КАТЕГОРИЙ М и N, ОПРЕДЕЛЕНИЕ ЭКСПЛУАТАЦИОННЫХ ТРЕБОВАНИЙ К ДАННЫМ СИСТЕМАМ И ПРОЦЕДУР ИСПЫТАНИЙ
Establishment of requirements for the minimum functionality of Lane Keep Assist (LKAS) systems installed on vehicles of categories M and N. determination of operational requirements for these systems and test procedures
Срок действия — с 2020—06—01 до 2023—06—01
1 Область применения
Настоящий стандарт описывает основную стратегию управления, минимальных функциональных требований, основных элементов интерфейса водителя, минимальные требования к диагностике и реакции на неисправность, а также процедуры эксплуатационных испытаний систем удержания в пределах полосы движения (LKAS). Система LKAS помогает водителям безопасно удерживать транспортное средство в пределах полосы движения, однако она не выполняет автоматическое вождение и не предотвращает возможные уходы с полосы движения. Ответственность за безопасную эксплуатацию транспортного средства всегда возлагается на водителя. Система LKAS предназначена для использования на автомагистралях и эквивалентных дорогах. Основой системы LKAS служат средства распознавания местоположения транспортного средства в пределах полосы движения, а также средства. влияющие на поперечное смещение транспортного средства. Система LKAS должна постоянно реагировать на действия водителя с учетом видимой дорожной разметки. Вопросы функционирования на участках дорог с временной или неправильно нанесенной дорожной разметкой не рассматриваются в настоящем стандарте.
Настоящий стандарт применяется к легковым автомобилям, коммерческому автотранспорту и автобусам.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 автоматическое вождение (automatic driving): Управление транспортным средством системой без водителя в контуре управления транспортным средством (например, без рук на рулевом колесе или ног на педалях).
2.2 активное состояние системы LKAS (LKAS active state): Включенная система, при включении которой были соблюдены все критерии активации.
2.3 видимая дорожная разметка (visible lane marling): Заранее размещенные на границе полосы движения ограничители, которые видны водителю во время движения (т. е. не покрыты снегом и т. д.).
2.4 видимость (visibility): Расстояние, на котором освещенность нерассеянного луча белого света с цветовой температурой 2700 К уменьшается до 5 % от освещенности исходного источника света.
2.5 включенное состояние системы LKAS (LKAS on state): Включенная система.
Издание официальное
2.6 время до пересечения разделительной линии TTLC (time to line crossing): Расчетное время до ухода с полосы движения.
Примечание — Например, простейшим методом расчета TTLC является деление поперечного расстояния О между определенной частью транспортного средства и границей полосы движения на скорость ухода V_depart транспортного средства относительно полосы движения: TTLC = D/V_depart.
2.7 второстепенный видимый дорожный объект (incidental visible road feature): Видимые элементы на поверхности дороги, которые не предназначены для определения границ полосы движения, но указывающие положение полосы движения.
Примечание — К таким объектам относятся тротуары, бордюры и бровки.
2.6 выключенное состояние системы LKAS (LKAS off state): Выключенная система.
2.9 граница полосы движения (lane boundary): Граница полосы движения, определяемая видимой дорожной разметкой (при отсутствии видимой дорожной разметки определяется второстепенными видимыми дорожными объектами или другими средствами, такими как GPS и т. д.).
Примечание — Граница видимой дорожной разметки находится в ее центре.
2.10 дежурное состояние системы LKAS (LKAS stand-by state): Выключенная система, но при этом не все критерии активации соблюдены.
2.11 запрос на блокировку (suppression request): Запрос водителя или функция системы, предназначенные для блокировки действия системы LKAS в случае обнаружения преднамеренной смены полосы движения.
2.12 испытываемое транспортное средство (subject vehicle): Транспортное средство, оборудованное системой LKAS согласно требованиям настоящего стандарта.
2.13 меры по сохранению полосы движения (lane keeping actions): Действия, выполняемые системой с целью воздействия на поперечное смещение транспортного средства, чтобы помочь водителю удержать транспортное средство в пределах полосы движения.
2.14 отказ (failure): Механическая или электрическая неисправность, приводящая к потере работоспособности или функционирования системы.
Примечание — Временные ограничения работоспособности (например, из-за плохих погодных условий, плохой дорожной разметки или временно утраченной чувствительности датчиков) не считаются отказом.
2.15 полоса движения (lane): Область автодороги, предназначенная для беспрепятственного движения транспортного средства при отсутствии у водителя желания изменить траекторию перемещения.
2.16 прямолинейный участок (straight): Участок дороги, кривизна которого меньше 1/5000 м.
2.17 скорость отклонения (rate of departure): Компонент скорости сближения транспортного средства под прямым углом к границе полосы движения.
2.18 состояние системы (system state): Один из нескольких периодов или стадий функционирования системы (см. рисунок 1).
3 Обозначения
В настоящем стандарте применены следующие обозначения:
D — расстояние между определенной частью транспортного средства и границей полосы движения;
LKAS_curvature_rate_max — максимальная скорость изменения кривизны, разрешенная для криволинейного испытательного трека;
LKAS_curve_time — минимальная продолжительность испытания на криволинейном участке после перехода на криволинейную траекторию;
LKAS_Lat_Acel_max — допустимое максимальное поперечное ускорение, возникающее во время сохранения полосы движения;
LKAS_Lat_Jerk_max — допустимый максимальный поперечный рывок, возникающий во время сохранения полосы движения;
LKAS_Offset_max — максимальная величина смещения наружных краев шин транспортного средства за границу полосы движения:
V_depart — скорость отклонения;
vm»x — функционирование системы LKAS не обязательно, если скорость транспортного средства больше umax;
vmin — функционирование системы LKAS не обязательно, если скорость транспортного средства меньше
mm
4 Требования
4.1 Функциональность
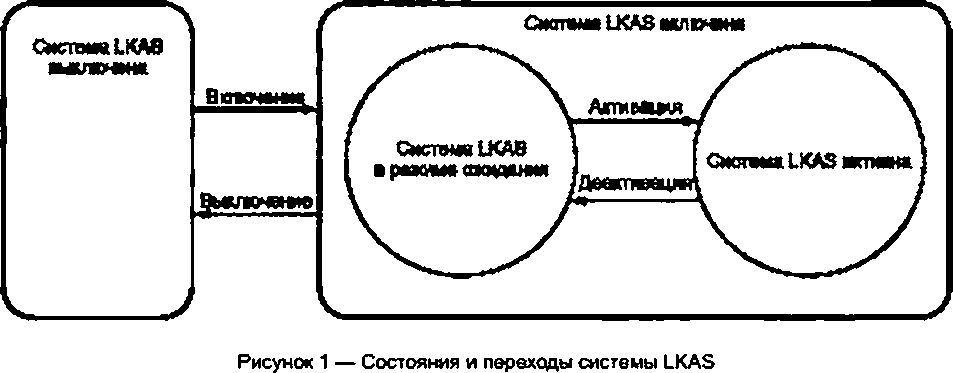
Система LKAS помогает водителям безопасно удерживать транспортное средство в пределах полосы движения, однако она не выполняет автоматическое вождение и не предотвращает возможный уход с полосы движения. Ответственность за безопасную эксплуатацию транспортного средства всегда возлагается на водителя. Система LKAS должна как минимум обеспечивать выполнение следующих операций и переходов между состояниями. Базовая функциональность системы LKAS подразумевает следующее:
• переход системы LKAS из выключенного состояния во включенное состояние может выполняться либо водителем, либо автоматически (например, после включения зажигания при отсутствии неисправностей в системе). Переход системы LKAS из включенного состояния в выключенное состояние может выполняться либо водителем, либо автоматически (например, после выключения зажигания или возникновения неисправностей в системе);
- система LKAS должна функционировать при движении транспортных средств на скоростях в диапазоне от vmin до vmax [vrain = 20 м/с. vra<n = 30 м/с или на максимально возможной скорости транспортного средства (в зависимости от того, какое значение меньше)]. Допускается функционирование в более широком диапазоне скоростей;
• в режиме ожидания система LKAS должна оценивать критерии активации. Система LKAS не должна выполнять никаких действий по сохранению полосы движения. В качестве одного из критериев активации должно использоваться определение положения транспортного средства в пределах полосы движения относительно видимой дорожной разметки. Производитель должен решить, необходимо ли обнаруживать одну или обе видимые дорожные разметки на полосе движения. Кроме того, производитель может задать такие критерии, как тип дорожной разметки (сплошная или прерывистая), минимальная скорость транспортного средства, действия водителя, угол поворота руля и другие параметры транспортного средства. Если все выбранные критерии активации соблюдены, система LKAS должна перейти из дежурного состояния в активное состояние. Такой переход может выполняться автоматически или после подтверждения водителя;
• система LKAS. находящаяся в активном состоянии, должна оценивать критерии активации. Если какой-либо из выбранных критериев активации не соблюдается, система LKAS должна перейти из активного состояния в дежурное состояние. В активном состоянии система LKAS может выполнять действия по сохранению полосы движения, чтобы повлиять на поперечное смещение транспортного средства и помочь водителю удержать транспортное средство в пределах полосы движения в том случае. когда вероятен непреднамеренный уход с полосы движения. Действия по сохранению полосы движения влияют на поперечное смещение транспортного средства относительно полосы движения таким образом, что TTLC увеличивается по сравнению с движением транспортного средства без выполнения действий по сохранению полосы (если водитель не отключил систему). Система способна обнаруживать запросы на блокировку, чтобы минимизировать мешающие меры по сохранению полосы движения. Запрос на блокировку может генерироваться при использовании водителем указателя поворота.
4.2 Основной интерфейс водителя и возможности вмешательства
Система должна предоставлять следующие возможности управления и вмешательства.
4.2.1 Элементы управления и реакции системы:
- водитель должен иметь возможность в любое время заблокировать систему LKAS. Среди средств блокировки системы LKAS необходимо предусмотреть поворот рулевого колеса.
Примечание — В качестве запроса на блокировку можно рассматривать определенные действия водителя:
- водитель должен иметь средства для переключения системы LKAS из включенного состояния в выключенное состояние и удержания системы LKAS в выключенном состоянии. Такой переход должен быть возможным независимо от нахождения системы LKAS в активном состоянии или в режиме ожидания;
- водитель должен иметь возможность для переключения системы LKAS из выключенного состояния во включенное состояние;
- руководство по эксплуатации транспортного средства должно содержать информацию об условиях. которые приводят к активации и деактивации системы LKAS.
4.2.2 Элементы отображения:
- информация о нахождении системы LKAS во включенном состоянии должна быть доступна водителю (например, в раскрывающемся меню);
- необходимо обеспечить наличие визуальной индикации нахождения системы LKAS в активном состоянии, за исключением случаев, когда транспортное средство оснащено комбинацией систем (например, системой предупреждения об уходе с полосы движения и системой LKAS). помогающих водителю удерживать транспортное средство в границах полосы движения. В этом случае необходима визуальная индикация активного состояния хотя бы одной из систем;
- водитель должен быть проинформирован о недоступности системы LKAS вследствие отказа.
4.2.3 Для идентификации функционирования или неисправности системы LKAS рекомендуется использовать стандартные условные знаки.
4.3 Минимальная функциональность
Чтобы подтвердить способность помогать водителю удерживать транспортное средство в пределах полосы движения, система LKAS должна пройти испытательную процедуру, описанную в разделе 6.
4.4 Эксплуатационные ограничения
При проектировании системы LKAS должна учитываться необходимость ее безопасного использования водителем в любой ситуации. Следовательно, необходимо ограничить маневры транспортного средства, обусловленные действиями по сохранению полосы движения.
Величина поперечного ускорения, вызванная действиями по сохранению полосы движения, не должна превышать LKAS_Lat_Acel_max. Кроме того, скользящее среднее за полсекунды поперечного рывка должно ограничиваться следующими величинами:
- LKAS_Lat_Jerk_max:
- LKAS_Lat_Acel_max = 3 м/с2;
- LKAS_Lat_Jerk_max = 5 м/с?.
Действия по сохранению полосы движения не должны приводить к продольному торможению более 3 м/с2. Действия по сохранению полосы движения, вызывающие продольное торможение более 1.0 м/с2, не должны привадить к снижению скорости более чем на 5 м/с.
Действия по сохранению полосы движения должны завершаться плавно при переходе системы LKAS из активного состояния в режим ожидания.
Руководство по эксплуатации транспортного средства должно информировать водителя о том, что неизменность функционирования системы LKAS не гарантируется для сухих ровных дорог в условиях низкого сцепления, дорог с поперечным изгибом, виражей или неблагоприятных погодных условий.
Такие ограничительные эксплуатационные требования должны выполняться при любых условиях.
4.5 Реакция на неисправности
Система должна проинформировать водителя о неисправностях компонентов LKAS. и при этом система LKAS переходит в выключенное состояние. Уведомление должно оставаться активным до выключения системы.
Повторная активация системы LKAS должна блокироваться до успешного выполнения самодиагностики. инициируемой при включении/выключении зажигания или системы LKAS.
Таблица 2 — Реакция на неисправности во время выполнения системой LKAS действий по сохранению полосы движения
Неисправная подсистема | Реакция |
1 Исполнительный механизм | Функционирование системы LKAS должно прекращаться. До полной остановки управления LKAS допустима ситуация, когда исполнительный механизм все еще способен завершить текущее действие по сохранению полосы движения или постепенно прекратить свою работу |
2 Система распознавания полосы движения | Действия по сохранению полосы движения должны завершаться не внезагыо. а постепенно |
3 Контроллер системы LKAS | Функционирование системы LKAS должно прекращаться |
5 Методы испытаний для оценки эксплуатационных характеристик
Вследствие влияния различных исполнительных механизмов (например, крутящего момента или угла поворота рулевого колеса в зависимости от одностороннего торможения) необходимо выбрать испытание. прохождение которого возможно всеми системами.
5.1 Условия окружающей среды
Испытания должны проводиться на ровной, сухой и чистой асфальтовой или бетонной поверхности.
Температура должна находиться в диапазоне от минус 20 *С до плюс 40 ’С.
Скорость ветра должна быть меньше 3 м/с.
Дальность видимости в горизонтальном направлении должна превышать 1 км.
Видимая дорожная разметка места проведения испытаний должна находиться в хорошем состоянии и учитывать требования соответствующих стандартов на дорожную разметку. Кроме того, разметка должна наноситься с учетом применимых стандартов для структуры и материалов дорожной разметки.
5.2 Условия испытательной трассы
Длина трассы должна позволять поддерживать минимальную скорость транспортного средства (не менее 20 м/с) и обеспечивать транспортному средству низкую скорость отклонения с полосы движения.
Ширина линий дорожной разметки должна находиться в диапазоне от 0.1 до 0.3 м и соответствовать действующим нормативам для автомагистралей.
Ширина полосы относительно дорожной разметки должна составлять от 3.4 до 3.9 м согласно применимым нормативам для автомагистралей.
5.3 Требования в отношении испытуемого транспортного средства
Полный снаряженный вес испытываемого транспортного средства вместе с водителем и испытательным оборудованием (общий вес водителя и испытательного оборудования не более 150 кг) не должен превышать максимально разрешенный суммарный вес. После начала процедуры испытания не допускается вносить какие-либо изменения.
5.4 Установка и настройка испытуемой системы
Система LKAS должна устанавливаться и настраиваться в соответствии с рекомендациями производителя. Каждое испытание системы LKAS с настраиваемым пользователем порогом предупреждения должно выполняться для самой последней настройки порога вмешательства. Система не должна изменяться после начала процедуры испытания.
5.5 Процедура испытаний
Вследствие различия концепций систем должна выполняться как минимум одна процедура испытаний: на прямой или по криволинейной траектории.
5.5.1 Параметры, определяемые на основе собранных данных
На основе собранных данных определяют следующие параметры:
- поперечное ускорение;
- скорость отклонения;
- скорость транспортного средства.
Во время проведения испытаний для всех действий по сохранению полосы движения, выполняемых с помощью системы LKAS. должны регистрироваться вышеперечисленные данные. Данные должны извлекаться устройством, которое не принадлежит системе. Точность испытательного устройства должна указываться в отчете об испытаниях.
5.5.2 Испытание на прямой
Процедура испытания состоит из восьми отдельных испытаний.
Испытания должны проводиться на прямолинейном участке дороги. Транспортное средство будет двигаться по прямолинейному участку дороги со скоростью от 20 до 22 м/с. При перемещении по прямолинейному участку дороги транспортное средство может двигаться по центру полосы или вдоль противоположной дорожной разметки, которая будет пересекаться в момент ухода с полосы движения (например, транспортное средство может двигаться вдоль левой дорожной разметки при правостороннем уходе с полосы движения и наоборот).
При поддержании заданной скорости, когда транспортное средство плавно и устойчиво движется по определенной траектории, такое транспортное средство должно покидать полосу со скоростью V_depart = 0.4 м/с ± 0.2 м/с для восьми испытаний {четыре влево (группа 1) и четыре вправо (группа 2)]. Испытатель должен проводить испытания на уход с полосы движения четыре раза для каждой группы с учетом скорости отклонения и дорожной разметки. Производитель автомобилей должен указать минимальный период времени между двумя последовательными испытаниями, чтобы избежать недоступности системы, например, в результате активации мер по предотвращению неправильной эксплуатации.
Исполнительные механизмы используют различные способы воздействия, поэтому эти испытания можно проводить со свободным (автоматически, без приложения внешнего крутящего момента) или зафиксированным рулевым колесом. Такие испытания должны проводиться со свободным или зафиксированным рулевым колесом.
Одиночное испытание считается успешным, если наружные края шин транспортного средства не пересекают границу полосы движения более чем на LKAS_Offset_max (0.4 м — для легковых автомобилей. 1.1 м — для большегрузных автомобилей).
Процедура испытаний считается пройденной при условии успешного прободения всех восьми испытаний.
5.5.3 Испытание при движении по криволинейной траектории
5.5.3.1 Проведение испытания
Процедура испытания состоит из двух отдельных испытаний. Скорость транспортного средства должна находиться в диапазоне от 20 до 22 м/с на протяжении всего испытания. Оба испытания должны проводиться на прямолинейном участке дороги, переходящем в поворот. На прямом участке дороги испытываемое транспортное средство должно располагаться по центру полосы таким образом, чтобы оно перемещалось прямо и параллельно полосе при нулевом угле поворота руля. После этого рулевое колесо должно высвобождаться непосредственно перед входом в поворот. Испытание должно продолжаться в течение LKAS_curve_time (5 с) с момента перехода на криволинейную траекторию. Каждое испытание проводят дважды (по одному разу для левостороннего и правостороннего поворотов). Одиночное испытание считается успешным, если наружные края шин транспортного средства не пересекают границу полосы движения более чем на LKAS_Offset_max (0.4 м для легковых автомобилей. 1.1м для большегрузных автомобилей) во время испытания. Процедура испытаний считается успешно пройденной при условии успешного проведения обоих испытаний (для правостороннего и левостороннего поворотов).
5.5.3.2 Испытательный трек
Радиус криволинейной траектории не требуется задавать, поскольку он постоянен во время всего испытания. На протяжении всего испытания скорость изменения кривизны должна оставаться постоянной и не превышать LKAS_curvature_rate_max (410'51/м2). Испытательный трек должен способствовать непрерывному движению транспортного средства посередине полосы с поперечным ускорением не более 1.0 м/с2. Как минимум на последней секунде испытания при движении транспортного средства посередине полосы испытательного трека поперечное ускорение должно находиться в диапазоне от 0,5 до 1.0 м/с2.
Приложение А (справочное)
Пример трека для испытаний при движении по криволинейной траектории
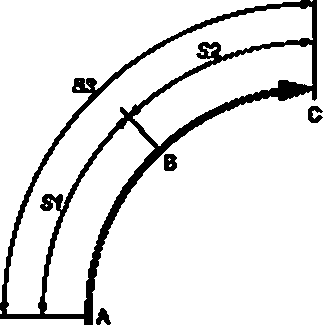
Рисунок А.1 — Пример криволинейного испытательного трека
Скорость V
Ускорение ау Радиус
Кривизна
Конец испытания через 5 с в точке
20 м/с
0.5 м/с2
Rv 2/в^ = 800 м. достигается в точке В с =1/R = 0.00125 1/м
CS3 = 5 с • v = 100м
ПРИМЕРЫ
1 Скорость изменения кривизны = dc/ds = 4 10~s 1/м2
SI = c/(dc/ds) = 31 м и S2 = S3 - S1 = 69 м
2 Скорость изменения кривизны = dc/ds = 1.56 10”5 1/мг
S1 = c/(dc/ds) = 80 м и S2 = S3 - S1 = 20 м
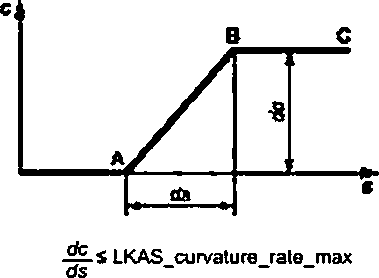
Рисунок А.2 — Кривизна криволинейного испытательного трека
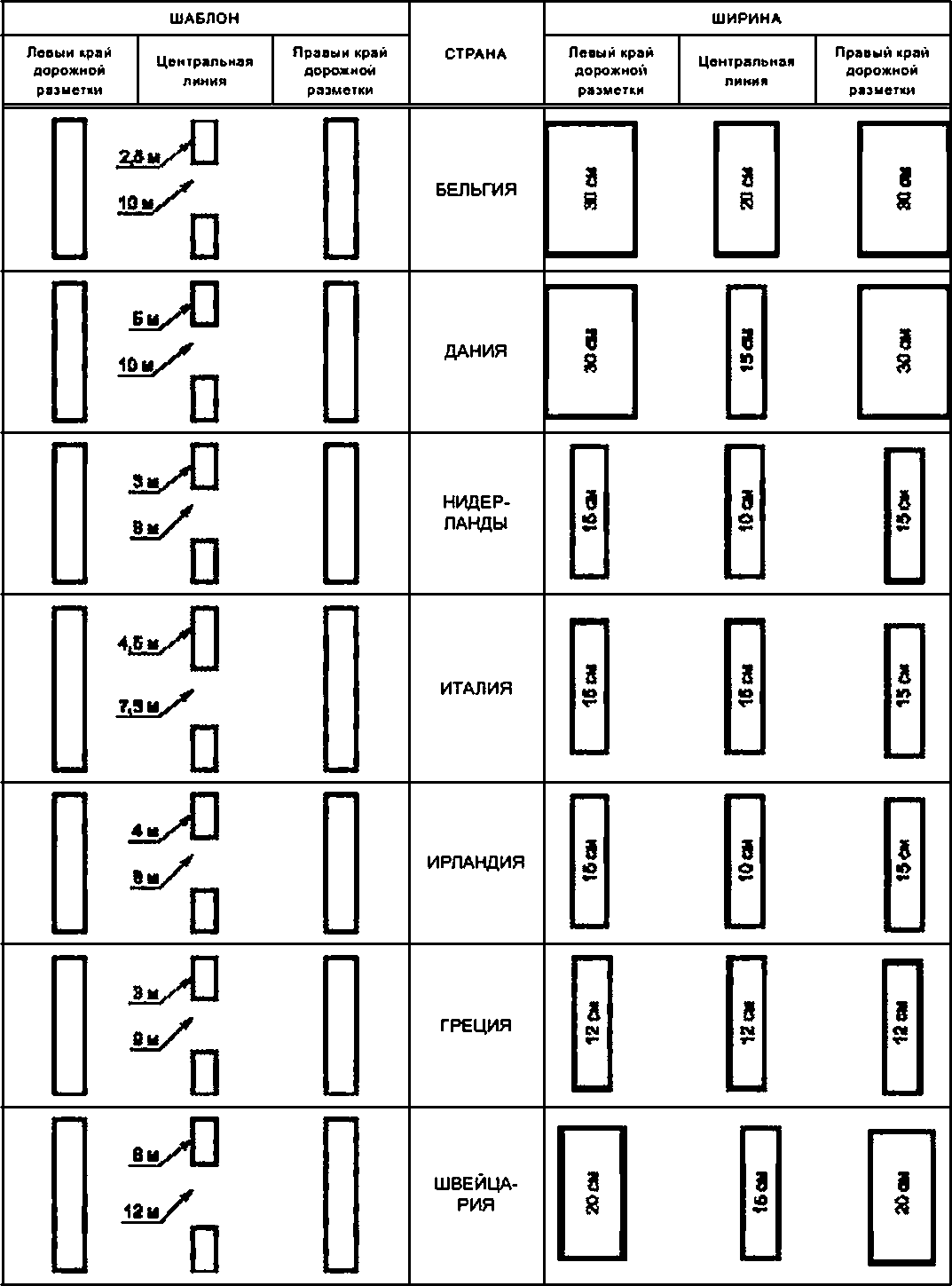
Приложение Б (справочное)
Национальная дорожная разметка в других странах
Б.1 Общие положения
Таблица Б.1
ШАБЛОН | СТРАНА | ШИРИНА | |||
Левый край дорожной разметки | Центральная пиния | Правый край дорожной разыетш | Левый край дорожном разметки | Центральная линия | Правый край дорожной разметки |

If | ШВЕЦИЯ | 20111 I | а о | 3 а | ||||||


Продолжение таблицы Б. 1
Окончание таблицы Б. 1
ШАБЛОН ШИРИНА
Левый кран дорожной разметки | Центральная линия | Правый край дорожной разыетш | СТРАНА | Левый «рви дорожной разметки | Центральная линия | Правый край дорожной разметки |
<s/*U | ПОРТУГАЛИЯ | в я | I I | а 8 | ||||||||
□ | НОРВЕГИЯ | |||||||||||
20 ЕМ | I 16 см | 20 см | ||||||||||
9м/ □ | ФИНЛЯНДИЯ | |||||||||||
9 | 9 О | 9 8 | ||||||||||
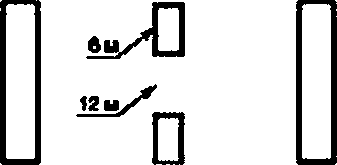
Б.2 Метод нанесения границ полос движения е Китае
Ширина полос движения находится в диапазоне от 3.0 до 3.75 м.
Ширина границ полос равна 100 мм. 150 мм или 200 мы.
Прерывистые разделительные линии имеют следующую структуру:
• 4м (отрезок прямой) * 6 м (разрыв) для встречного направления:
•2м (отрезок прямой) + 4 м (разрыв) для попутного направления в городских условиях:
•6м (отрезок прямой) + 9 м (разрыв) для автомагистралей.
Прим еча н и в — ^формация о границах полос движения е Китае заимствована из [1].
Б.З Геометрия границ полос движения в Италии
Нормативными документами предусмотрена следующая геометрия границ полос движения в Италии:
• ширина полос должна находиться в диапазоне от 2.5 м до 3.75 м для обычных полос движения и от 2 м до 3.5 м для аварийных полос движения. Однако практические измерения показали реальную ширину приблизительно 4 м:
• ширина границ полос находится в диапазоне от 120 мм (обычные) до 150 мм (автомагистрали) — 250 мм (границы).
Прерывистые разделительные линии имеют следующую структуру:
• 3 м (отрезок прямой) + 3 м (разрыв) для городских районов:
• 3 м (отрезок прямой) + 4.5 м (разрыв) для второстепенных городских дорос;
• 4.5 м (отрезок прямой) + 7.5 м (разрыв) для автомагистралей.
В особых случаях возможны другие варианты дорожной разметки.
Б.4 Геометрия границ полос движения в Японии
Ширина полос должна находиться в диапазоне от 2.75 м до 3.5 м для обычных полос движения и от 3.25 м до 3.75 м для полос движения на автомагистралях
Ширина границ полос находится в диапазоне от 100—150 мм (границы) до 200 мм (центр).
Отрезки и разрывы прерывистых разделительных линий должны быть одинаковой длины (от 3 м до 10 м) для центральных линий. Длина окрашенных отрезков границ разметки находится в диапазоне от 3 м до 10 м. а разрывов — от 6 м до 20 м.
Б.5 Дорожная разметка в США
Ширина полосы: от 2.6 м до 4 J м.
Ширина разделитегъных линий: от 120 мм до 250 мм (250 мм для широких разделителышх линий).
Двойные параллельные окрашенные разделительные линии, обозначающие участки, где запрещен обгон на дорогах с двусторонним движением, имеют ширину 100 мм. при этом расстояние между ними равно 80 мм.
Б.5.1 Прерывистые разделительные линии
Средняя длина отрезков прерывистых разделитегъных линий (с разрывами между отрезками) составляет приблизительно 4 м (± 2 м). а длина разрывов между отрезками равна приблизительно 6 м (± 2 м).
Б.5.2 Прочие характеристики
При разметке дорог в Кагмфорнии вместо окрашенных линий можно использовать выпуклые разметочные вставки, соответствующие требованиям нормативной документации. Такие элементы дорожной разметки могут окрашиваться е белый или желтый цвет. Цвет окраски зависит от конкретных условий применения с учетом логики, использованной при выборе белого или желтого цвета окрашенных линий.
Существует два типа элементов разметки: неотражающие круглые «точки» и прямоугольные отражатели.
Точки (О): диаметр 100 мм. сферическое сечение с максимальной высотой до 16 мм относительно дорожного покрытия.
Отражатели (R): ширина 100 мм. длина (е направлении движения) от 50 мм до 100 мм. высота 10 мм относительно дорожного покрытия. Площадь светоотражающей поверхности должна составлять не менее 6.45 см2.
Они используются вместо окрашенных линий, которые обычно имеют ширину 100 мм. Вместо окрашенной линии двойной ширины можно использовать два ряда вышеуказанных близко расположенных элементов дорожной разметки.
Непрерывная линия, запрещающая обгон, представляется такими элементами дорожной разметки. разделенными расстоянием 1.2 м и расположенными е следующей непрерывно повторяющейся последовательности: RDDDDDRDDDDD....
В случае использования разрывных линий на участках, где разрешен обгон, или между полосами многорядных автомагистралей возможны две конфигурации окрашенных отрезков, каждая из которых имеет свой эквивалент в виде элементов дорожной разметки.
Окрашенный отрезок дгмной 2.1 м с разрывом 5.2 м (регулярно повторяющаяся структура) или элементы дорожной разметки, расположенные следующим образом: R — 2.4 м — D — 1.2 м — О — 1.2 м — О — 4.8 м —
— D — 1.2 м — D — 1.2 м — D — 2.4 м — R (также повторяются регулярно).
Окрашенный отрезок длиной 3.65 м с разрывом 11 м (регулярно повторяющаяся структура) или элементы дорожной разметки, расположенные следующим образом: R — 5.5 м — D — 1,2 м — О — 1,2 м — О — 1.2 м —
— О — 5.5 м — R (также повторяются регулярно).
Б.6 Геометрия границ полос движения в Австралии
Рекомендованная ширина полос равна 3.5 м. но может варьироваться от 2.6 м (поворотные полосы) или 2.8 м (загородные дороги с низким уровнем загрузки без краевой разметки) до 4.5 м (регулируемые перекрестки развязок скоростных автомагистралей).
Параметры продольных линий и варианты их применения не одинаковы в восьми штатах и территориях Австралии. Ширина линий варьируется от 80 мм до 200 мм в зависимости от годовой среднесуточной интенсивности движения (AADT) и типа дороги. Используются преимущественно линии белого цвета. Желтые линии используются для краевой разметки отдельных участков дороги (в настоящее время они не применяются как разделительные/ заградительные линии).
Краевые линии (белые):
• непрерывные: ширина от 80 мм до 200 мм:
• прерывистые: пиния 24 м. разрыв 1 м с отражателем (RRPM). помешенным в разрыв.
При наличии особых обстоятельств (плохое выравнивание, туман и похожие условия) краевые линии могут наноситься на два дорожных полотна шириной от 5.5 м до 6.8 м.
Для узких полос движения вместо нанесения краевой разметки или внешней границы (вблизи разделительной полосы) можно покрасить бордюр.
Краевые линии (желтые):
• непрерывные: ширина от 80 мм до 200 мм на участках, где запрещена остановка, или в местах скопления снега;
• прерывистые; отрезок 9 м. разрыв 1 м. в местах скопления снега;
• прерывистые: отрезок 600 мм. разрыв 900 мм. желтый цвет в местах ограниченной парковки:
• прерывистые; отрезок 3 м. разрыв 3 м (участки, на которых запрещены остановки в определенное время); Прерывистая или разрывная разметка:
- сплошные линии: отрезок 1 м. разрыв 3 м;
• разметка на поворотах: отрезок 600 мм. разрыв 600 мм;
• специального назначения: отрезок 9 м. разрыв 3 м;
• осевые линии: отрезок 3 м. разрыв 9 м;
• разделительные линии: отрезок 3 м. разрыв 9 м (наиболее распространенные): отрезок 9 м. разрыв 3 м: отрезок 6 м, разрыв 6 м.
Заградительные линии:
• двойные двусторонние: две параллельные сплошные белые линии;
• двойные односторонние: одна сплошная линия, параллельная разделительной гании с отрезком 3 м и разрывом 9 м.
Выпуклые светоотражающие разметочные вставки (RRPM) используются как часть имитируемых осевых линий (см. ниже), а также в качестве дополнения продольных линий. RRPM можно поместить в разрывы осевых, разделительных и краевых линий, а также с обеих сторон сплошной краевой разметки, учитывая ширину обочины.
Имитируемая осевая линия формируется выпуклыми светоотражающими (RRPM) и неотражающими (NRPM) разметочными вставками, которые используются в качестве альтернативы окрашенных отрезков 3 м и разрывов 9 м. в виде повторяющейся последовательности RRPM NRPM NRPM NRPM с разрывом 9 м.
Прим еча н и е — В качестве источников используются документы (3). (4].
Австралийский стандарт 1742.2-2009. Руководство по унифицированным устройствам для регулирования дорожного движения. Часть 2. Устройства общего назначения для регулирования дорожного движения.
AUSTROADS. Руководство по регулированию дорожного движения. Часть 10. Устройства для регулирования дорожного движения и обеспечения связи.
AUSTROADS. Руководство по проектированию дорог. Часть 3. Геометрическая конструкция
Различные государственные опубликованные стандарты разметки дорожного покрытия (например. RMS-NSW. VicRoads. CHd Main Roads. SA DPTI)
Б.7 Дорожная разметка в Нидерландах
Дорожная разметка охватывает:
• продольную разметку;
• размегху пересечений:
• прочие элементы разметки:
• стрелки:
• запрещающие знаки;
• угловые области:
• знаки и дорожную разметку.
Зона транспортных потоков (проезжая часть дороги и полосы движения транспорта) ограничивается продольной разметкой, которая обычно ориентирована параллельно оси дороги. Продольная разметка может иметь вид непрерывных ига прерывистых (разрывных) линий, которые подразделяются на краевые и центральные ига разделительные линии. Ширина линии зависит от местоположения разметки. Длина сегментов и разрывов прерывистых разделительных линий зависит от назначения разметки. Для центральной гании возможна комбинация сплошных и/или прерывистых линий, которые располагаются на расстоянии, равном их ширине.
Требования, предъявляемые к ширине линий разметки и полос движения, можно разделить на две части: автострады и не автострады.
Автомагистрали:
• дороги с разрешенной скоростью движения до 120 км/ч;
• ширина полосы движения (с разделительными линиями, без краевых ганий): 3.50 м:
• ширина краевой линии: 0.20 м;
• ширина разделительной линии: 0.15 м.
В особых случаях возможно использование других значений ширины полос движения.
Загородные дороги:
• дороги с разрешенной скоростью движения до 60 км/ч;
• ширина полосы движения (без разметки): 2,75 м;
• ширина краевой разметки и центральной разделительной линии: 0,10 м;
• дороги с разрешенной скоростью движения до 80 км/ч:
• ширина полосы движения (без разметки): 3,10 м;
• ширина краевой линии: 0.15 м:
• ширина центральной разделительной линии: 0.10 м:
• дороги с разрешенной скоростью движения до 100 км/ч;
• ширина полосы движения (без разметки): 3.25 м;
• ширина краевой линии: 0.15 м:
• ширина центральной разделительной линии: 0.10 м.
В особых случаях возможно использование других значений ширины полос движения.
Б.8 Дорожная разметка автомагистралей в Канаде
Дорожная разметка охватывает следующее:
• нормальная ширина линий: от 100 мм до 150 мм;
• широкая пиния почти 8 два раза шире нормальной линии;
• двойная линия состоит из двух нормальных линий;
• прерывистая пиния образована короткими отрезками и разрывами в соотношении 1:1. Обычно длина отрезков и разрывов находится в диапазоне от 0.5 м до 3.0 м.
Осевые пинии прерываются белыми линиями (обычно отрезки и разрывы в соотношении 1:2). Рекомендуется структура, состоящая из сегментов длиной 3.0 м и разрывов 6.0 м. На высокоскоростных дорогах, таких как автомагистрали. можно использовать соотношение между сегментами и разрывами 1:3 (сегмент 3.0 м. разрыв 9.0 м).
На городских улицах ширина полосы движения, определяемая разделительными линиями, обычно не должна быть менее 3.1 м. однако на практике ширина оказывается более узкой и равняется 2.8 м. Ширина должна увеличиваться на резко изогнутых участках городских улиц.
Краевые линии представляют собой непрерывные сплошные линии, нанесенные как можно ближе к полосе движения. Белая линия используется справа от полосы движения, а желтая линия — слева.
Примечание — Нижеследующая информация о руководящих принципах для ширины полос заимствована из [5]:
• двухполосные загородные дороги: от 3.0 до 3.7 м (S 80 км/ч) или от 3.3 до 3.7 м (> 80 км/ч):
- многополосные загородные дороги: от 3.5 до 3.7 м (< 100 км/ч) или 3.7 (й 100 км/ч);
• городские автомагистрали, главные магистральные дороги и технические/коммерческие дороги: 3.7 м:
• второстепенные, подъездные и местные технические/коммерческие дороги: от 3.5 до 3.7 м;
• местные подъездные дороги: от 3.0 до 3.7 м.
Б.9 Ширина полос движения и дорожная разметка в Корее
Ширина полосы движения: 2.75—3,50 м.
Ширина краевых и центральных разделительных линий полос движения должна находиться в диапазоне от 100 до 150 мм.
Отрезки и разрывы прерывистых разделительных линий полос движения должны иметь длину от 3 до 10 м. Руководящие прингдглы подразумевают следующее;
• главные и магистральные городские дороги: окрашенная линия — 3 м. разрыв — 5 м:
- загородные магистральные дороги: окрашенная линия — 5 м, разрыв — 8 м;
• автомагистрали и скоростные дороги: окрашенная линия — 10 м. разрыв — 10 м.
Библиография
(1] GB 5768:1999 «Дорожные знаки и разметка»
(2] AS 1742.2—2009 «Manual of Uniform Traffic Control Devices. Part 2: Traffic Control devices for general use»
(3] AUSTROADS. Guide to traffic management. Part 10: Traffic control and communication devices
(4] AUSTROADS. Guide to road design. Part 3: Geometrick design
(5] Canadian Geometrick design (1999)
УДК 004.73:006.354
ОКС 35.240.60
Ключевые слова; интеллектуальные транспортные системы, электронный сбор платы за проезд, архитектура систем сбора платы за проезд, бортовое оборудование
S3 4—2020/21
Редактор Е.А. Моисеева Технический редактор В.Н. Прусакова Корректор ЕЛ Дупьнева Компьютерная верстка Е.А. Кондрашовой
Сдано в набор t9.03.2020. Подписано в печать 14.07.2020. Формат 60«84Я. Гарнитура Ариал. Усл. пвч. п. 2.32. Уч.-над. л. 2.10.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении по .
117418 Москва. Нахимовский пр-т. д. 31. к. 2. wwwgostinfo.ru info@goslinfo.ru
{kind=link}