ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
70982—
2023
СИСТЕМЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА НА АВТОМОБИЛЬНОМ ТРАНСПОРТЕ
Системы управления движением транспортным средством. Требования к структуре и архитектуре У2Х-взаимодействия
Издание официальное
Москва
Российский институт стандартизации 2023
ГОСТ Р 70982—2023
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью «А+С Транспроект» (ООО «А+С Транспроект»), Обществом с ограниченной ответственностью «A-Я эксперт» (ООО «A-Я эксперт»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 164 «Искусственный интеллект»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 18 октября 2023 г. № 1180-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
©Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 70982—2023
Введение
В настоящее время системы искусственного интеллекта (ИИ) все чаще применяются в транспортной отрасли. В целях повышения безопасности дорожного движения, достижения мобильности и комфорта для участников дорожного движения необходимо осуществить качественное взаимодействие подключенных транспортных средств (ТС), в том числе высокоавтоматизированных транспортных средств (ВАТС), с окружающей средой, инфраструктурой и другими участниками дорожного движения.
Настоящий стандарт является частью комплекса стандартов по установлению требований к применению технологий ИИ на автомобильном транспорте с целью повышения доверия к технологиям ИИ, повышения уровня безопасности на транспорте и эффективности транспортных процессов.
Требования настоящего стандарта направлены на обеспечение доверия к системам ИИ на автомобильном транспорте, безопасности дорожного движения, жизни и здоровья людей, сохранности их имущества и охраны окружающей среды, а также на минимизацию затрат и повышение эффективности при проектировании и реализации систем ИИ и \/2Х-взаимодействия на автомобильном транспорте.
Ill
ГОСТ Р 70982—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
СИСТЕМЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА НА АВТОМОБИЛЬНОМ ТРАНСПОРТЕ
Системы управления движением транспортным средством. Требования к структуре и архитектуре У2Х-взаимодействия
Artificial intelligence systems in road transport.
Vehicle traffic control systems. Requirements for V2X-interaction structure and architecture
Дата введения — 2024—01—01
1 Область применения
Настоящий стандарт устанавливает требования к структуре и архитектуре \/2Х-взаимодействия в системах управления движением ТС, основанных на применении технологий ИИ.
Настоящий стандарт распространяется на системы 72Х-взаимодействия, реализованные и функционирующие в составе систем управления движением ТС. В настоящем стандарте под ТС понимается эксплуатируемое на автомобильных дорогах общего пользования колесное ТС категорий М и N (по ГОСТ Р 52051) с 0-м — 5-м уровнями автоматизации управления движением (по ГОСТ Р 58823) и имеющее в своем составе модуль OBU для У2Х-взаимодействия.
Примечание — Несмотря на то, что в состав ТС с 0-м — 2-м уровнями автоматизации управления движением по ГОСТ Р 58823 не входит система автоматизации управления движением, при наличии установленного бортового устройства V2X, такие ТС являются подключенными ТС и должны обеспечивать 72Х-взаимодействие в соответствии с теми же требованиями, что и ВАТС с 3-м — 5-м уровнями автоматизации управления движением.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 28906 (ИСО 7498—84, ИСО 7498—84 Доп. 1—84) Системы обработки информации. Взаимосвязь открытых систем. Базовая эталонная модель
ГОСТ Р 52051 Механические транспортные средства и прицепы. Классификация и определения
ГОСТ Р 58823 Автомобильные транспортные средства. Системы автоматизации управления движением. Классификация и определения
ГОСТ Р 70249 Системы искусственного интеллекта на автомобильном транспорте. Высокоавтоматизированные транспортные средства. Термины и определения
ГОСТ Р 70250 Системы искусственного интеллекта на автомобильном транспорте. Варианты использования и состав функциональных подсистем искусственного интеллекта
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана
Издание официальное
1
ГОСТ Р 70982—2023
датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 70249, а также следующие термины с соответствующими определениями:
3.1
подключенное транспортное средство; подключенное ТС: ТС, осуществляющее обмен информацией (в том числе в одностороннем порядке) с центральной системой управления, инфраструктурой или другими ТС.
[ГОСТ Р 70981—2023, пункт 3.11]
3.2 система управления движением транспортным средством: Совокупность аппаратных и программных средств ТС, обеспечивающих выполнение ЗУД, \/2Х-взаимодействие и системы активной безопасности.
Примечание — Для транспортных средств 1-го — 5-го уровней автоматизации управления движением по ГОСТ Р 58823 системой управления движением ТС считается совокупность системы автоматизации управления движением и бортового устройства V2X.
3.3 сервис на основе У2Х-взаимодействия: Информационная система или программное обеспечение, использующее \/2Х-взаимодействие для решения конкретных задач для повышения безопасности, эффективности и удобства транспортных систем.
3.4
телематическая информация: Совокупность данных о состоянии контролируемого объекта и обстановки в нем и/или вокруг него, передаваемых с контролируемого транспортного средства в навигационно-информационные системы.
[ГОСТ 33472—2015, пункт 3.16]
3.5
У2Х-взаимодействие; V2X: Обмен информацией между подключенным ТС и любым другим объектом посредством технологий беспроводной связи.
Примечание — V:ot англ, vehicle — автомобиль, транспортное средство. Другие объекты — другие подключенные ТС, объекты дорожной инфраструктуры, пешеходы и пассажиры и т. д.
[Адаптировано из ГОСТ Р 70249—2022, статья 62]
3.6
задача управления движением; ЗУД: Совокупность выполняемых в реальном времени функций управления и планирования действий (тактические функции), которые требуются для управления транспортным средством в условиях дорожного движения, исключая стратегические функции, такие как планирование поездок, выбор пунктов назначения и промежуточных точек маршрутов.
[ГОСТ Р 58823—2020, пункт 2.13]
3.7
система (технология) автоматизации управления движением: Аппаратные и программные средства систем автоматического управления движением 1-го — 5-го уровней, которые в совокупности способны выполнять всю ЗУД или ее часть в длительном режиме.
[ГОСТ Р 58823—2020, пункт 2.8]
2
ГОСТ Р 70982—2023
3.8
электромобиль; электрическое ТС: Автотранспортное средство, приводимое в движение исключительно электромеханическим преобразователем энергии, имеющее собственную автономную перезаряжаемую систему хранения электрической энергии, заряжаемую с помощью внешнего источника электроэнергии.
[Адаптировано из ГОСТ Р 59102—2020, статья 56]
3.9 система класса «Умный дом»: Система домашней автоматизации, интегрированная система управления различными инженерными устройствами здания, способная обеспечить решение определенных повседневных задач и выполнять заданные последовательности действий без участия человека.
3.10 дорожный контроллер: Техническое периферийное средство автоматизированной системы дорожного движения, предназначенное для переключения сигналов светофоров и символов управляемых многопозиционных дорожных знаков и указателей скорости как на локальном (отдельном) перекрестке, так и на перекрестке, входящем в систему координированного управления дорожным движением.
3.11 самоорганизующаяся децентрализованная пиринговая сеть: Сеть передачи информации, которая организуется на базе стационарных и мобильных устройств одного ранга без участия централизованной системы управления для ее организации.
3.12 сетевая связность: Возможность передачи информации от актора к актору в рамках одной сети передачи информации.
3.13 оконечное устройство: Составная часть системы передачи информации, устанавливаемая на акторе \/2Х-взаимодействия (например, OBU, RSU).
3.14
интеллектуальная транспортная система; ИТС: Система управления, интегрирующая современные информационные и телематические технологии и предназначенная для автоматизированного поиска и принятия к реализации максимально эффективных сценариев управления транспортно-дорожным комплексом региона, конкретным транспортным средством или группой транспортных средств с целью обеспечения заданной мобильности населения, максимизации показателей использования дорожной сети, повышения безопасности и эффективности транспортного процесса, комфортности для водителей и пользователей транспорта.
[ГОСТ Р 56829—2015, статья 1]
3.15 кооперативная интеллектуальная транспортная система; КИТС: Подмножество общих интеллектуальных транспортных систем, которое передает и обменивается информацией между станциями интеллектуальных транспортных систем для предоставления, обмена или получения данных и рекомендаций или оказания услуг с целью повышения безопасности, устойчивости, эффективности и комфорта за рамками автономных систем.
4 Обозначения и сокращения
В настоящем стандарте использованы следующие обозначения и сокращения:
C2V — взаимодействие ИТС с ТС (center-to-vehicle);
D2V — взаимодействие произвольных устройств в окружении ТС с ТС (device-to-vehicle);
H2V — взаимодействие системы класса «Умный дом» с ТС (home-to-vehicle);
I2V —взаимодействие придорожного периферийного оборудования с ТС (infrastructure-to-vehicle);
OBU —бортовое устройство (on-board unit);
P2V —взаимодействие устройств пассажиров и (или) пешеходов с ТС (passenger-to-vehicle/ pedestrian-to-vehicle);
RSU —телекоммуникационный элемент дорожной инфраструктуры (road-side unit);
V2C — взаимодействие ТС с ИТС (vehicle-to-center);
V2D —взаимодействие ТС с произвольными устройствами в своем окружении (vehicle-to-device);
V2G — подключение ТС к энергетической сети (vehicle-to-grid);
3
ГОСТ Р 70982—2023
V2H V2I | — взаимодействие ТС с системой класса «Умный дом» (vehicle-to-home); — взаимодействие ТС с придорожным периферийным оборудованием (vehicle-to-infrastructure); |
V2N V2P | — взаимодействие ТС с сетью передачи данных (vehicle-to-network); — взаимодействие ТС с устройствами пассажиров или пешеходов (vehicle-to-passenger/ vehicle-to-pedestrian); |
V2V V2X VANET БТС ВАТС ЗУД ИИ ИТС КИТС | — взаимодействие ТС друг с другом (vehicle-to-vehicle); — взаимодействие ТС со всем вокруг (vehicle-to-everything); — автомобильная самоорганизующаяся сеть (vehicular ad-hoc network); — беспилотное ТС; — высокоавтоматизированное ТС; — задача управления движением; — искусственный интеллект; — интеллектуальная система управления; — кооперативная ИТС; |
СИИАУД —система искусственного интеллекта автоматизированного управления движением;
ТЗ ТС | — техническое задание; — транспортное средство. |
5 Требования к структуре \/2Х-взаимодействия в системах управления движением транспортным средством
5.1 Структура \/2Х-взаимодействия должна быть направлена на решение следующих задач в соответствии с [1]:
- разработку технологий, обеспечивающих движение БТС по автомобильным дорогам, формирование перечня таких технологий и рекомендаций по их применению, в том числе в части дорожно-транспортной инфраструктуры;
- внедрение на автомобильных дорогах общего пользования ИТС, ориентированных в том числе на обеспечение движения БТС.
5.2 Также структура \/2Х-взаимодействия должна быть направлена на решение следующих задач:
- предотвращение дорожно-транспортных происшествий;
- повышение эффективности организации дорожного движения;
- ретрансляцию информации, требуемой участникам, в рамках ее распространения по VANET.
5.3 Общая структура \/2Х-взаимодействия в системе управления движением ТС может включать в себя следующие типы взаимодействия:
- V2C- и С2\/-взаимодействие — двухсторонний или односторонний обмен информацией между подключенным ТС и ИТС;
- V2I- и 12\/-взаимодействие — двухсторонний или односторонний обмен информацией между подключенным ТС и придорожной инфраструктурой, прежде всего с техническими средствами организации дорожного движения;
- \/27-взаимодействие — двухсторонний обмен информацией между несколькими подключенными ТС;
- P2V- и \/2Р-взаимодействие — двухсторонний или односторонний обмен информацией между подключенным ТС, пешеходами и пассажирами;
- D2V- и \/2О-взаимодейтсвие — двухсторонний или односторонний обмен информацией между подключенным ТС и любым электронным устройством, подключенным к \/2Х-сети;
- \/2С-взаимодействие — подключение в общую энергосистему для своевременной подзарядки ВАТС или иного электрического ТС или возвращения лишней электроэнергии обратно;
- H2V- и \/2Н-взаимодействие — двухсторонний или односторонний обмен информацией между подключенным ТС и системой класса «Умный дом»;
- У2Ы-взаимодействие — тип взаимодействия, при котором подключенное ТС взаимодействует непосредственно с сетью передачи данных как актором.
4
ГОСТ Р 70982—2023
5.3.1 Необходимо, чтобы С2\/-взаимодействие обеспечивало (не ограничиваясь):
- обновление карты и дорожной обстановки, в том числе информации о временных ограничениях, путях объезда и т. п.;
- передачу информации о траекториях ТС, окружающих подключенное ТС;
- передачу информации для пополосного управления подключенными ТС;
- передачу информации, которая может использоваться подключенными ТС для изменения параметров своего движения (например, для снижения скорости, остановки и т. д.);
- передачу разнообразной информации для доведения до пассажиров.
5.3.2 Необходимо, чтобы \/2С-взаимодействие обеспечивало (не ограничиваясь):
- передачу телематической информации о состоянии подключенного ТС, параметрах его маршрута, окружающей среде;
- передачу информации об окружающем пространстве для актуализации карты и транспортной модели на микроуровне.
5.3.3 12\/-взаимодействие должно обеспечивать передачу в бортовую систему подключенного ТС информации, которую может предоставить соответствующее устройство в составе придорожной инфраструктуры (состав и структура информации зависит от типа устройства).
5.3.4 \/21-взаимодействие должно обеспечивать передачу информации от подключенного ТС к ближайшим дорожным контроллерам о приближении и маршруте следования для принятия контроллером оптимальных решений о фазах регулирования.
5.3.5 Необходимо, чтобы \/2\/-взаимодействие обеспечивало (не ограничиваясь):
- передачу информации о состоянии подключенного ТС всем приближающимся подключенным ТС для более быстрого принятия решений;
- передачу информации об окружающем пространстве всем приближающимся подключенным ТС для более точного моделирования условий движения;
- ретрансляцию информации всем подключенным ТС в рамках ее распространения по VANET.
5.3.6 P2V-взaимoдeйcтвиe должно обеспечивать запросы на вызов подключенного ТС с параметрами предполагаемого маршрута.
5.3.7 Необходимо, чтобы V2P-взaимoдeйcтвиe обеспечивало (не ограничиваясь):
- формирование маршрута для перевозки пассажира;
- передачу информационных сообщений различного характера.
5.3.8 О2\/-взаимодействие и \/2О-взаимодействие должно обеспечивать передачу информации по VANET через устройства, подключенные к этой сети.
5.3.9 \/2С-взаимодействие должно обеспечивать сам факт подключения ВАТС или иного электрического ТС к общей энергетической сети.
5.3.10 Необходимо, чтобы Н2\/-взаимодействие и \/2Н-взаимодействие обеспечивали (не ограничиваясь):
- определение факта подключения подключенного ТС к энергетической сети системы класса «умного дома»;
- передачу общей информации о пользователе (если это применимо) от подключенного ТС системе класса «умный дом» и в обратном направлении;
- передачу информации по VANET через систему класса «умный дом».
5.3.11 72Ы-взаимодействие должно обеспечивать сам факт подключения подключенного ТС к сети передачи данных.
5.4 В структуре V2X-взaимoдeйcтвия допускается передача информации иного типа на усмотрение разработчика системы У2Х-взаимодействия.
5.5 Схема общей структуры V2X-взaимoдeйcтвия приведена в приложении А.
6 Требования к архитектуре У2Х-взаимодействия в системах управления движением транспортным средством
6.1 У2Х-взаимодействие рекомендуется использовать в транспортных системах автомобильной модальности, в том числе для организации сетей VANET. Это позволит обеспечить сетевую связность подключенных ТС и ВАТС, а также реализовать возможность обеспечения для них доступа к ИТС даже в условиях отсутствия покрытия централизованной сетью (подвижная радиотелефонная связь, радио-
5
ГОСТ Р 70982—2023
доступ для беспроводной передачи данных в диапазоне от 30 МГц до 66 ГГц, технологии беспроводной передачи данных и другие стандарты беспроводного обмена информацией).
6.2 Архитектура \/2Х-взаимодействия для реализации описанной задачи представляет собой самоорганизующуюся децентрализованную пиринговую сеть, состоящую из акторов, находящихся в прямом радиоконтакте. Дистанция, на которой находятся акторы, и возможность присутствия объектов между акторами определяется конкретной технологией радиообмена, на базе которой строится V2X-взаимодействие.
6.3 Обеспечение сетевой связности для акторов \/2Х-взаимодействия, вышедших из зоны покрытия централизованной сети, возможно реализовать следующими способами:
6.3.1 В состав самоорганизовавшейся децентрализованной пиринговой сети входят акторы, которые все еще находятся в зоне покрытия централизованной сети связи. В этом случае передача информации от подключенных ТС через VANET в ИТС и в обратном направлении осуществляется сначала по проложенным каналам связи между акторами в составе VANET до все еще подключенных акторов, которые передают и получают информацию через централизованную сеть связи.
6.3.2 Все множество акторов, которые организовали пиринговую сеть VANET, находится вне зоны покрытия централизованной сети связи. В этом случае должно осуществляться накопление пакетов информации в бортовых системах тех акторов, которые находятся максимально близко к зоне покрытия централизованной сети и по прогнозам должны в первую очередь попасть в эту зону. Прием и передача информации осуществляются сразу, как только один из акторов сети VANET войдет в зону покрытия централизованной сети связи.
6.4 Протокол, используемый для организации V2X-взaимoдeйcтвия посредством сети VANET, должен обеспечивать информационную безопасность при нахождении переданных информационных пакетов в бортовых устройствах других акторов. Необходимо, чтобы обеспечивалась конфиденциальность и целостность аутентифицированной информации, а также надежность ее передачи в ИТС. Конкретные требования к информационной безопасности, конфиденциальности, целостности аутентифицированной информации и надежности ее передачи определены в ТЗ на конкретную систему V2X-взаимодействия.
6.5 Акторами V2X-взaимoдeйcтвия в рамках представленной архитектуры организации сетей VANET являются (но не ограничиваются):
- бортовое оборудование, имеющее в своем составе модули OBU для V2X-взaимoдeйcтвия (V-компонент V2X-взaимoдeйcтвия), установленное на подключенных ТС;
- бортовое оборудование, имеющее в своем составе модули OBU для V2X-взaимoдeйcтвия (V-компонент V2X-взaимoдeйcтвия) и входящее в состав системы ИИ для управления движением подключенного ТС;
- стационарное периферийное оборудование (модули RSU), предназначенное для расширения зоны покрытия централизованной сети связи (1-компонент V2X-взaимoдeйcтвия);
- бортовое оборудование для организации сетей VANET (D-компонент V2X-взaимoдeйcтвия), установленное на беспилотных летательных аппаратах (дронах), автономных мобильных роботах и иных БТС, которые могут перемещаться в зоне действия V2X-взaимoдeйcтвия;
- устройства у пешеходов и пассажиров ТС, которые могут поддерживать V2X-взaимoдeйcтвиe (Р-компонент V2X-взaимoдeйcтвия);
- произвольные устройства в зоне организации сети VANET с возможностью подключения и предоставления своих вычислительных мощностей и функциональности для организации пиринговых сетей (D-компонент V2X-взaимoдeйcтвия).
6.6 ТС, устройства у пешеходов и пассажиров, дроны и другие типы БТС и роботов, которые могут использоваться для организации сетей VANET при осуществлении V2X-взaимoдeйcтвия, являются подвижными акторами, остальные типы акторов являются стационарными.
6.7 В сети VANET выполняются следующие функции:
- прием и передача информации по сети VANET;
-диспетчеризация информационных потоков в сети VANET;
- прогнозирование местоположения подвижных акторов, входящих в состав сети VANET, для их использования в целях накопления информационных пакетов с целью их передачи в ИТС при входе соответствующего актора в зону действия централизованной сети связи;
- реорганизация сети VANET при включении в ее состав новых и исключении из нее имеющихся акторов;
6
ГОСТ Р 70982—2023
- защита информации как на оконечных устройствах в составе акторов, так и в процессе передачи информации по каналам связи в составе сети VANET.
6.8 Представленная архитектура \/2Х-взаимодействия предназначена для организации транспортного уровня VANET по ГОСТ 28906 для реализации функций КИТС, состоящей из акторов, участвующих в дорожном движении, и решающей комплексные задачи, недоступные для каждого отдельного актора или их невзаимодействующей совокупности.
6.9 При проектировании архитектуры \/2Х-взаимодействия разработчик обязан руководствоваться тем, что:
- архитектура предназначена для поддержки ряда сервисов на основе \/2Х-взаимодействия для удовлетворения потребностей участников КИТС;
- архитектура должна быть гибкой, чтобы позволять предоставлять новые услуги на основе существующих и будущих стандартов и технологий У2Х-взаимодействия (например, IEEE 802.11 р, IEEE 802.11 bd, 3GPP LTE-V2X, 3GPP 5G NR-V2X, 3GPP 6G NR-V2X);
- насколько это возможно, все сервисы, обмен сообщениями и интерфейсы должны быть основаны на существующих стандартах \/2Х-взаимодействия. Учитывая, что технологии V2X все еще развиваются, а в стандарты вносятся изменения и дополнения, архитектура должна быть способна обновляться при сохранении обратной совместимости, чтобы обеспечить поэтапное развертывание новых сервисов;
- необходимо, чтобы архитектура обеспечивала легкий доступ разработчикам сервисов V2X-взаимодействия для предоставления инновационных или локализованных услуг;
- архитектура должна быть, насколько это возможно, технологически нейтральной;
- архитектура не должна ограничиваться определенными в настоящее время сервисами, а должна предусматривать возможность для предоставления новых сервисов;
- необходимо, чтобы архитектура обеспечивала возможность эксплуатации и технического обслуживания систем \/2Х-взаимодействия.
6.10 При проектировании архитектуры У2Х-взаимодействия разработчик обязан руководствоваться положениями и требованиями ГОСТ Р 70250.
6.11 В ТЗ на разработку системы У2Х-взаимодействия должны быть включены положения, уточняющие требования к структуре и архитектуре У2Х-взаимодействия в части учета влияния пространственного расположения взаимодействующих элементов системы управления движением ТС.
6.12 Схема общей архитектуры У2Х-взаимодействия приведена в приложении Б.
7
ГОСТ Р 70982—2023
Приложение А (справочное)
Общая структура У2Х-взаимодействия
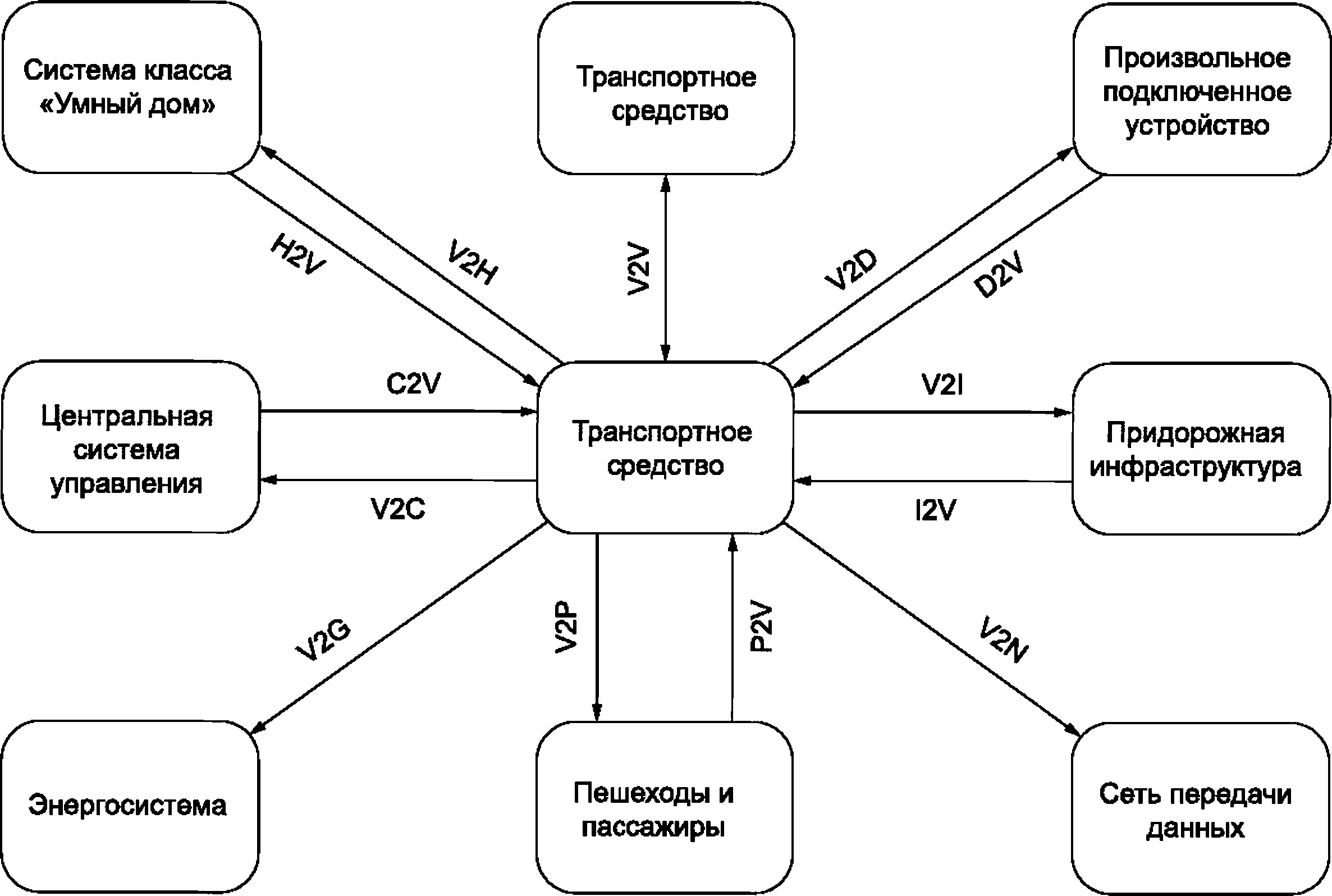
Рисунок А.1 — Общая структура \/2Х-взаимодействия
8
ГОСТ Р 70982—2023
Приложение Б (справочное)
Общая архитектура У2Х-взаимодействия
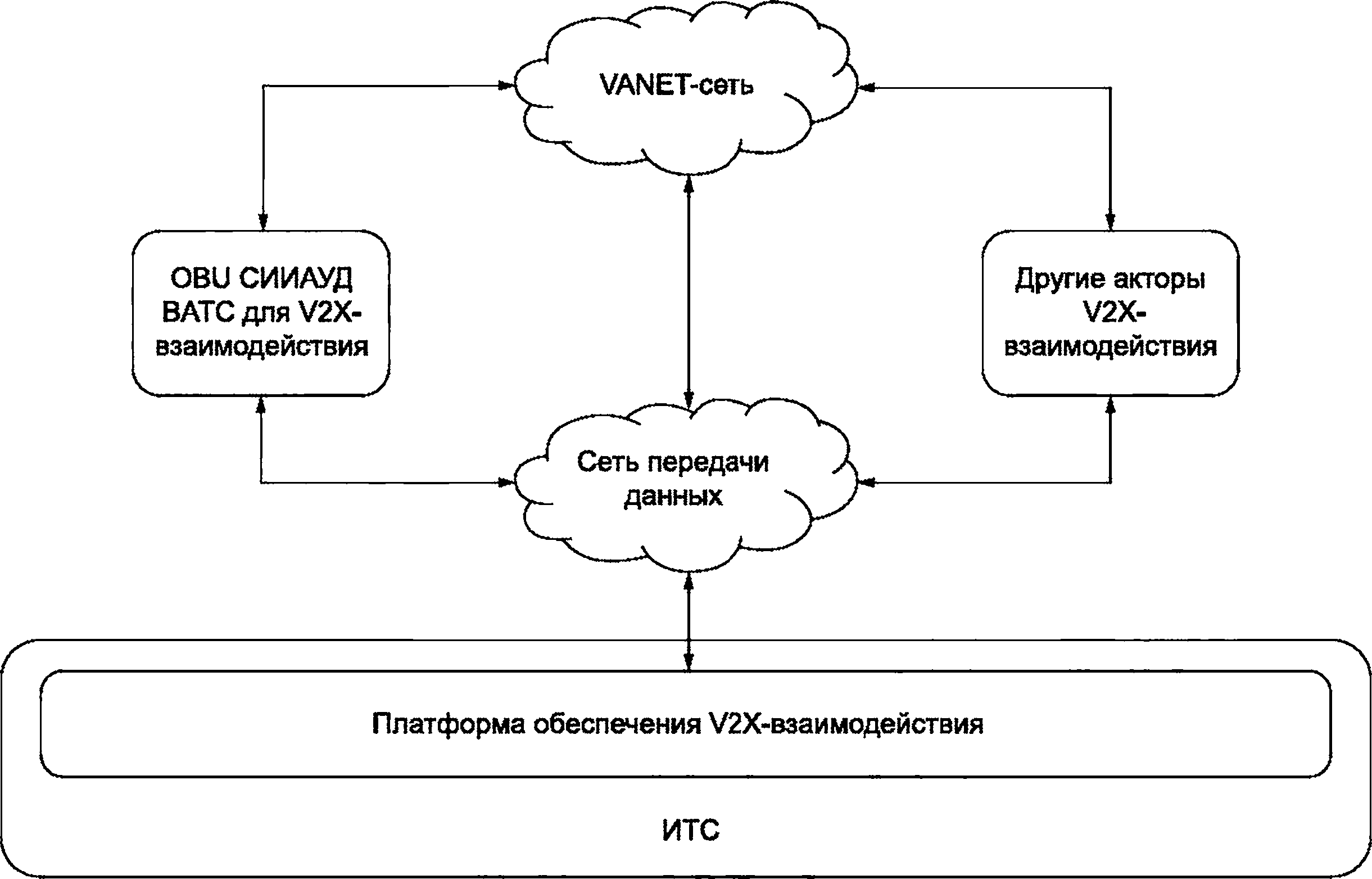
Рисунок Б.1 — Общая архитектура \/2Х-взаимодействия
9
ГОСТ Р 70982—2023
Библиография
[1] Распоряжение Правительства Российской Федерации от 25 марта 2020 г. № 724-р «О Концепции обеспечения безопасности дорожного движения с участием беспилотных транспортных средств на автомобильных дорогах общего пользования»
10
УДК 62-52:006.354
ГОСТ Р 70982—2023
ОКС 35.240.60
Ключевые слова: искусственный интеллект, автомобильный транспорт, система управления, структура, архитектура, V2X, \/2Х-взаимодействие
11
Редактор М.В. Митрофанова Технический редактор В.Н. Прусакова Корректор И.А. Королева Компьютерная верстка М.В. Малеевой
Сдано в набор 20.10.2023. Подписано в печать 03.11.2023. Формат 60x847s. Гарнитура Ариал. Усл. печ. л. 1,86. Уч.-изд. л. 1,00.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}