ГОСТ Р ИСО 7626-2-2016
Группа Т34
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация и удар
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ МЕХАНИЧЕСКОЙ ПОДВИЖНОСТИ
Часть 2
Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем
Mechanical vibration and shock. Experimental determination of mechanical mobility. Part 2. Measurements using single-point translation excitation with an attached vibration exciter
ОКС 17.160
Дата введения 2017-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 24 ноября 2016 г. N 1767-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 7626-2:2015* «Вибрация и удар. Экспериментальное определение механической подвижности. Часть 2. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем» (ISO 7626-2:2015 «Mechanical vibration and shock - Experimental determination of mechanical mobility - Part 2: Measurements using single-point translation excitation with an attached vibration exciter», IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок - в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Общее введение к стандартам серии ИСО 7626, посвященным измерениям механической подвижности конструкций
Определение механической подвижности конструкций объектов позволяет получить их частотно-зависимые динамические характеристики, выраженные через разные характеристики движения: скорости (механическую подвижность), ускорения (ускоряемость) или перемещения (динамическую податливость), - в разных точках конструкции. Каждая такая характеристика является, по сути, совокупностью фазовых векторов движения конструкции, являющегося откликом на приложенное единичное силовое (или моментное) воздействие, амплитуда и фаза которых зависят от частоты.
Поскольку ускоряемость и динамическая податливость отличаются от механической подвижности только выбором величины, описывающей движение конструкции, для упрощения изложения во всех частях ИСО 7626 рассматривается измерение механической подвижности. При необходимости полученную частотную характеристику легко преобразовать к любому другому виду изменением характеристики движения, например скорости на ускорение.
Обычно измерение механической подвижности выполняют в целях решения следующих задач:
a) предсказания отклика конструкции объекта на известное входное возбуждение;
b) определения модальных характеристик конструкции (форм мод, собственных частот и коэффициентов демпфирования);
c) описания динамического взаимодействия связанных конструкций;
d) проверки адекватности и повышения точности математических моделей конструкций;
e) определения динамических свойств (например, комплексных модулей упругости) простых и композиционных материалов.
Некоторые задачи требуют полного описания динамической характеристики конструкции в заданной точке как отклик поступательных и угловых движений в трех взаимно перпендикулярных направлениях на соответствующие возбуждения силами и моментами силы. Таким образом, в данной точке механические подвижности образуют матрицу размерности 6x6. Если такую характеристику определяют в точках конструкции, то ее полное описание соответствует матрице механических подвижностей размерности
![]() .
.
В большинстве практических задач полного знания матрицы механических подвижностей не требуется, и достаточно определить, как правило, значение входной и одной или нескольких переходных подвижностей, прилагая силовое воздействие только в одной точке конструкции и измеряя в соответствующих точках характеристики поступательного движения. Однако иногда для описания динамического поведения объекта приходится измерять также угловые составляющие движения и моменты сил.
Исторически частотные характеристики конструкций принято было описывать в величинах, обратных вышеуказанным. Так, величиной, обратной механической подвижности, является механический импеданс. Однако необходимо иметь в виду, что в общем случае обращение каждого элемента матрицы механических подвижностей не позволяет получить матрицу механических импедансов. Корректное преобразование требует обращения всей матрицы механических подвижностей в целом. Данный вопрос рассматривается в ИСО 7626-1:2011.
Введение к настоящему стандарту
В большинстве практических задач механическую подвижность достаточно определять по измерениям прямолинейной скорости в одной или нескольких ключевых точках конструкции (включая точку возбуждения) в ответ на прямолинейное силовое воздействие в единственной точке. Такое воздействие может быть приложено с помощью вибровозбудителя, как соединенного, так и не соединенного с испытуемым объектом. Разделение способа возбуждения на два указанных класса важно с точки зрения возможности быстро и легко изменить место приложения воздействия. Так, например, гораздо проще возбуждать конструкцию в разных точках с помощью измерительного молотка, чем обеспечивать надежное соединение конструкции с вибровозбудителем в каждой такой точке. Однако часто предпочтительнее возбуждать конструкцию присоединенным вибровозбудителем, и данный способ рассматривается в настоящем стандарте. Измерения с использованием ударного возбуждения устройством, не присоединяемым к конструкции, рассматриваются в ИСО 7626-5.
1 Область применения
Настоящий стандарт устанавливает методы измерения механической подвижности конструкций, таких как здания, машины и транспортные средства, с помощью присоединяемого вибровозбудителя, создающего поступательное возбуждение конструкции в течение всего времени измерения.
Настоящий стандарт распространяется на измерения входной и переходной подвижности и может быть также использован при измерениях других частотных характеристик, таких как ускоряемость, динамическая податливость или эффективная масса. В настоящем стандарте рассматривается одновременное возбуждение конструкции в одной точке, но число точек одновременных измерений отклика может быть произвольным (что может потребоваться, например, при модальном анализе).
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ISO 2041, Mechanical vibration, shock and condition monitoring - Vocabulary (Вибрация, удар и контроль состояния. Словарь)
ISO 7626-1:2011, Mechanical vibration and shock - Experimental determination of mechanical mobility - Part 1: Basic terms and definitions, and transducer specifications (Вибрация и удар. Экспериментальное определение механической подвижности. Часть 1. Основные требования, определения и требования к преобразователям)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 2041, а также следующие термины с соответствующими определениями.
Примечание - Поскольку настоящий стандарт посвящен непосредственно частотным характеристикам конструкций и их измерениям, в примечаниях к словарным статьям содержатся дополнительные сведения по сравнению с приведенными в ИСО 2041.
3.1 частотная характеристика (frequency-response function): Частотно-зависимое отношение Фурье-преобразования отклика к Фурье-преобразованию возбуждения линейной системы.
Примечание 1 - Возбуждение может представлять собой гармоническую или случайную функцию времени, а также переходный процесс. Частотная характеристика не зависит от вида возбуждения при условии, что в диапазоне возбуждения и отклика поведение объекта возбуждения линейно. В этом случае результаты испытаний, проведенных с возбуждением конкретного вида, будут справедливы для предсказания отклика системы при всех видах возбуждения. Фазовые векторы и эквивалентные им понятия, используемые для описания возбуждения в форме случайной функции или переходного процесса, рассмотрены в приложении В.
Примечание 2 - На практике условия линейности системы выполняются только в некотором приближении в зависимости от вида системы и уровня возбуждения. При проведении испытаний важно убедиться в отсутствии существенных нежелательных нелинейных эффектов, особенно в случае импульсного возбуждения. Если заранее известно, что поведение испытуемого объекта нелинейно (например, если в конструкцию объекта входят элементы, заполненные жидкостью), то для их испытаний импульсное возбуждение не применяют, а при необходимости использовать случайное возбуждение учитывают комбинационные составляющие в спектре отклика.
Примечание 3 - Характеристики движения (возбуждения и отклика) могут быть выражены в единицах скорости, ускорения или перемещения. Соответственно, частотные характеристики будут иметь названия "(механическая) подвижность", "ускоряемость" и "динамическая податливость".
[ИСО 2041:2009, статья 1.53 с изменениями]
3.2 (механическая) подвижность [(mechanical) mobility]: Отношение комплексной скорости в заданной точке механической системы к силе, действующей в той же или другой точке механической системы.
Примечание 1 - Подвижность представляет собой отношение комплексной скорости отклика в точке к комплексной вынуждающей силе в точке
, когда на движение всех остальных точек механической системы не наложено никаких ограничений, кроме тех, что обусловлены опорой конструкции при ее нормальном применении.
Примечание 2 - В данном определении под словом "точка" понимают как местоположение, так и направление движения. В том же значении могут быть использованы также понятия "координата" или "степень свободы".
Примечание 3 - Отклик может быть выражен либо через скорость, либо через угловую скорость, а возбуждение - через силу или момент силы.
Примечание 4 - Если отклик имеет вид поступательного движения, а возбуждение прямолинейно, то подвижность измеряют в м/(Н·с).
Примечание 5 - Механическая подвижность представляет собой элемент матрицы, полученной обращением матрицы механических импедансов.
[ИСО 2041:2009, статья 1.54 с изменениями]
3.3 входная (механическая) подвижность [driving-point (mechanical) mobility]: Отношение комплексной скорости отклика в точке
к комплексной вынуждающей силе, приложенной в той же точке, когда на движение всех остальных точек механической системы не наложено никаких ограничений, кроме тех, что обусловлены опорой конструкции при ее нормальном применении.
[ИСО 2041:2009, статья 1.55 с изменениями]
3.4 переходная (механическая) подвижность * [transfer (mechanical) mobility]: Отношение комплексной скорости отклика в точке
к комплексной вынуждающей силе, приложенной в точке
, когда на движение всех точек механической системы, кроме точки
, не наложено никаких ограничений, кроме тех, что обусловлены опорой конструкции при ее нормальном применении.
___________________
* Текст документа соответствует оригиналу. - .
[ИСО 2041:2009, статья 1.56 с изменениями]
3.5 диапазон частот испытаний (frequency range of interest): Диапазон частот от самой низкой до самой высокой частоты, в котором должны быть получены данные о механической подвижности в данной серии испытаний.
[ИСО 7626-1:2011, статья 3.1.5 с изменениями]
4 Состав измерительной системы
Система измерений подвижности состоит из элементов, подобранных с учетом выполнения конкретной задачи испытаний. Однако все системы включают в себя основные элементы и их соединения, показанные на рисунке 1. Требования к элементам системы измерений и их характеристикам рассмотрены в разделах 5-9.
|
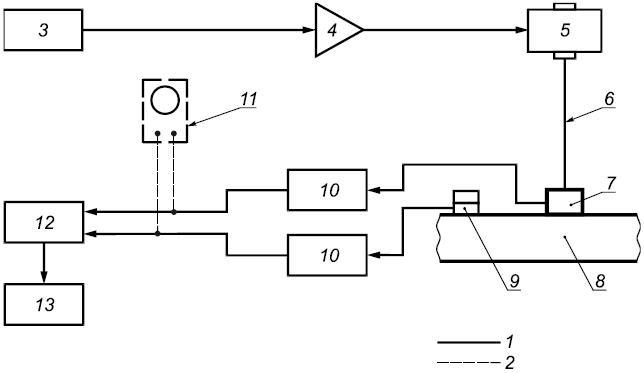
1 - основной элемент (соединение) системы; 2 - вспомогательный элемент (соединение) системы; 3 - генератор сигналов; 4 - усилитель мощности; 5 - вибровозбудитель; 6 - толкатель; 7 - преобразователь силы; 8 - испытуемая конструкция; 9 - преобразователь вибрации; 10 - устройство согласования сигнала; 11 - контрольный осциллограф; 12 - анализатор; 13 - графопостроитель или другое выходное устройство
Рисунок 1 - Блок-схема системы измерений механической подвижности
5 Опора испытуемой конструкции
5.1 Общие положения
Измерения проводят для безопорных (свободно подвешенных) или опертых (с одной или несколькими опорами) конструкций в зависимости от цели испытаний. Ограничения движения, связанные с применяемым вибровозбудителем, рассмотрены в 6.4.
5.2 Измерения для опертых конструкций
Опора испытуемой конструкции должна представлять собой нормальную опору в обычных условиях эксплуатации объекта за исключением особо оговариваемых случаев. Описание опоры следует включать в протокол испытаний.
5.3 Измерения для безопорных конструкций
При испытаниях конструкции в безопорном положении следует использовать мягкий подвес. Значения входной подвижности подвеса в каждой точке крепления к испытуемой конструкции должны, по крайней мере, в десять раз превышать значения входных подвижностей конструкции в той же точке. Сведения о системе подвеса заносят в протокол испытаний.
Если соотношение между входными подвижностями подвеса и конструкции в точках крепления неизвестны, то пригодность подвеса проверяют по соблюдению следующего условия. Все собственные частоты колебаний испытуемой конструкции как твердого тела на подвесе не должны превышать половины нижней границы диапазона частот испытаний.
Как правило, для мягкого подвеса используются амортизационные шнуры и упругие подушки из таких материалов, как пенопласт или резина. Поскольку некоторые системы подвеса обладают значительной массой при малом демпфировании, необходимо убедиться, что резонансные частоты подвеса далеко отстоят от собственных частот изгибных колебаний испытуемой конструкции. Массы любых элементов подвеса, таких как крюки и стяжные гайки, расположенных близко к испытуемой конструкции, не должны превышать одной десятой эффективной массы холостого хода конструкции во всем диапазоне частот испытаний.
Точки крепления испытуемой конструкции к подвесу определяют в ходе предварительных испытаний, исходя из требования, чтобы подвес оказывал минимальное влияние на результаты измерений подвижности. Так, целесообразно выбирать точки крепления подвеса вблизи узловых точек собственных изгибных колебаний конструкции. Шнуры подвеса по возможности следует располагать перпендикулярно направлению возбуждения, но даже в этом случае поперечная вибрация шнуров может повлиять на результаты измерений.
Любое дополнительное демпфирование конструкции, вызываемое системой подвеса, должно быть принято во внимание и учтено.
6 Возбуждение
6.1 Общие положения
Выбор наиболее подходящего вида возбуждения зависит от особенностей измерительной задачи, включая обеспечиваемый вибровозбудителем диапазон частот и уровень возбуждения, желаемое отношение сигнал/шум, ограничение времени на испытания, возможностей системы управления испытаниями. До того времени, как широкое распространение получили алгоритмы обработки сигналов с использованием быстрого преобразования Фурье (БПФ), наиболее употребительным было гармоническое возбуждение. С его помощью можно получить отклик конструкции на заданной частоте возбуждения, а для того, чтобы охватить весь диапазон частот испытаний, частоту возбуждения изменяют с некоторым шагом. Современные БПФ-анализаторы позволяют использовать более сложные виды возбуждения, позволяющие воспроизводить вибрацию в широких полосах частот. Особенности разных видов возбуждения и применяемые при этом вибровозбудители рассматриваются в 6.2 и 6.3 соответственно.
6.2 Виды возбуждения
6.2.1 Общие положения
В 6.2.2-6.2.5 рассмотрены только некоторые виды возбуждения, наиболее часто применяемые на практике в настоящее время. Сравнительный анализ достоинств и недостатков разных видов возбуждения приведен в [4].
6.2.2 Гармоническое возбуждение на фиксированных частотах
Данное возбуждение представляет собой последовательность прилагаемых воздействий с использованием гармонических сигналов на дискретно изменяющихся частотах, равномерно распределенных по диапазону частот испытаний. Требования к выбору приращения частоты возбуждения установлены в 9.2.2. Длительность возбуждения на каждой частоте должна быть достаточной для достижения установившегося отклика и получения временной выборки той длины, которая необходима при выбранном способе обработки сигнала.
6.2.3 Гармоническое возбуждение со сканированием частоты
При использовании возбуждения данного вида частоту гармонического сигнала изменяют непрерывно от нижней до верхней границы диапазона частот испытаний. Скорость изменения частоты (сканирования) должна быть достаточно малой, чтобы достичь квазиустановившегося отклика конструкции. Указания по выбору скорости сканирования приведены в 9.2.3. В каждый короткий промежуток времени энергия возбуждения концентрируется в узком диапазоне частот.
6.2.4 Стационарное случайное возбуждение
Возбуждение данного вида определяется статистическими характеристиками сигнала, такими как спектральная плотность мощности. Рекомендации по выбору спектральной плотности мощности сигнала, позволяющие сконцентрировать основную часть энергии возбуждения в диапазоне частот испытаний, приведены в 9.4.3. При данном способе возбуждения все моды вибрации с собственными частотами в пределах диапазона частот испытаний возбуждаются одновременно.
6.2.5 Возбуждение других видов
6.2.5.1 Общие положения
Виды возбуждения, рассматриваемые в 6.2.5.2-6.2.5.5, также способны вызвать одновременное присутствие в отклике всех мод в диапазоне частот испытаний. Методы обработки сигналов и управления испытаниями подобны тем, что описаны для стационарного случайного возбуждения. Все эти виды возбуждения обладают периодичностью и позволяют для лучшего определения отклика испытуемой конструкции использовать методы синхронного накопления.
6.2.5.2 Псевдослучайное (полигармоническое) возбуждение
Сигнал возбуждения синтезируют в цифровом виде в частотной области для придания желаемой формы спектру сигнала. На основе данного спектра с помощью обратного преобразования Фурье генерируется периодически повторяющийся цифровой сигнал, который затем преобразуют в аналоговый сигнал управления вибровозбудителем.
6.2.5.3 Гармоническое возбуждение с линейной частотной модуляцией
Возбуждение данного вида формируется на основе гармонического сигнала, частота которого периодически возрастает и убывает линейно по времени в пределах заданного диапазона. Сигнал генерируется либо в цифровой форме, либо с помощью генератора развертки. Для улучшения отношения сигнал/шум сигнал выполняют синхронное усреднение по времени.
6.2.5.4 Возбуждение периодической последовательностью импульсов
При данном возбуждении генерируется, как правило, в цифровом виде периодически повторяющаяся импульсная функция заданной формы. Сигнальный процессор должен быть синхронизован с генератором сигналов. Форму импульса (обычно это экспоненциальный импульс или полусинусоида) выбирают таким образом, чтобы удовлетворить требованиям к частотам возбуждения.
6.2.5.5 Периодическое случайное возбуждение
Возбуждение данного вида сочетает свойства случайного и псевдослучайного возбуждения в том смысле, что оно удовлетворяет условию периодичности, но в то же время изменяется со временем так, что воздействует на конструкцию подобно случайному возбуждению. При данном способе возбуждения частотную характеристику определяют усреднением по разным псевдослучайным возбуждениям.
6.3 Вибровозбудители
В качестве устройств, присоединяемых к испытуемой конструкции для воздействия на нее вынуждающей силы заданного вида, применяют, как правило, электродинамические, гидравлические, пьезоэлектрические или механические (дебалансные) вибровозбудители. Типичные диапазоны частот возбуждения для каждого из перечисленных устройств приведены на рисунке 2.
|
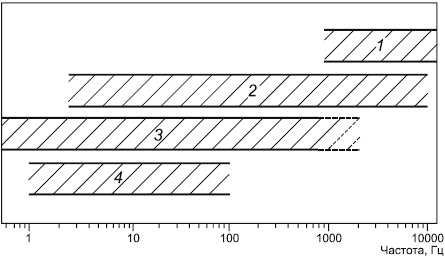
1 - пьезоэлектрические; 2 - электродинамические; 3 - гидравлические; 4 - механические
Рисунок 2 - Типичные диапазоны частот испытаний для разных вибровозбудителей
Применяемый вибровозбудитель должен обеспечивать создание достаточной силы и перемещения, чтобы измерения подвижности были выполнены во всем диапазоне частот испытаний с необходимым отношением сигнал/шум. При широкополосном случайном возбуждении, как правило, необходим более мощный вибровозбудитель, чем при гармоническом. Требования к уровню вынуждающей силы можно снизить за счет фильтрации фонового шума или использования временного усреднения сигналов возбуждения и отклика.
Примечание - Критерием правильности выбора вибровозбудителя при данном уровне фонового шума и электрических помехах в цепи управления может служить функция когерентности между сигналами возбуждения и отклика.
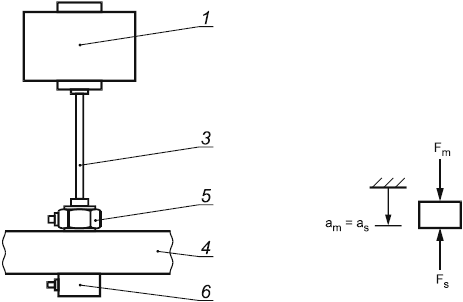
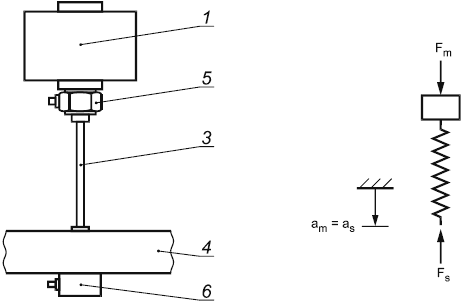
Прилагаемая к конструкции вынуждающая сила приводит к появлению силы реакции, воздействующей на сам вибровозбудитель и воспринимающейся его опорой или его массой, как показано на рисунках За) и 3b). Если это необходимо, к вибровозбудителю присоединяют дополнительную массу. Конфигурацию испытательной установки следует выбирать таким образом, чтобы реакция передавалась на вибровозбудитель только через преобразователь силы. Недопустима, например, передача силы реакции через общее основание, на котором установлены как испытуемая конструкция, так и вибровозбудитель [(см. рисунок 3с)].
6.4 Меры по предотвращению нежелательных сил и моментов сил
6.4.1 Общие положения
При измерениях механической подвижности в соответствии с настоящим стандартом необходимо, чтобы вынуждающая сила прилагалась к испытуемой конструкции в заданной точке и в заданном направлении. Любые нежелательные силы или моменты силы (т.е. отличные от вынуждающей силы, действующей в заданном направлении) приводят к погрешностям измерений. В частности, точка возбуждения и другие измерительные точки конструкции должны свободно без ограничений перемещаться в любом направлении. Не следует допускать динамического взаимодействия между конструкцией и преобразователями силы и движения, а также взаимодействия между конструкцией и вибровозбудителем. Чтобы убедиться в отсутствии нежелательных сил и моментов, выполняют рекомендации, приведенные в 6.4.2-6.4.4.
6.4.2 Влияние массы преобразователя
Нежелательные силы возникают в каждой точке крепления преобразователя как результат движения с ускорением массы преобразователя. Погрешности, вызванные влиянием массы преобразователя, должны быть сведены до минимума подбором преобразователя наименьшей массы, согласующимся с требованием к его коэффициенту преобразования. При измерении входной подвижности нагрузка преобразователем силы может быть скомпенсирована электронным способом, как указано в 7.3.
|
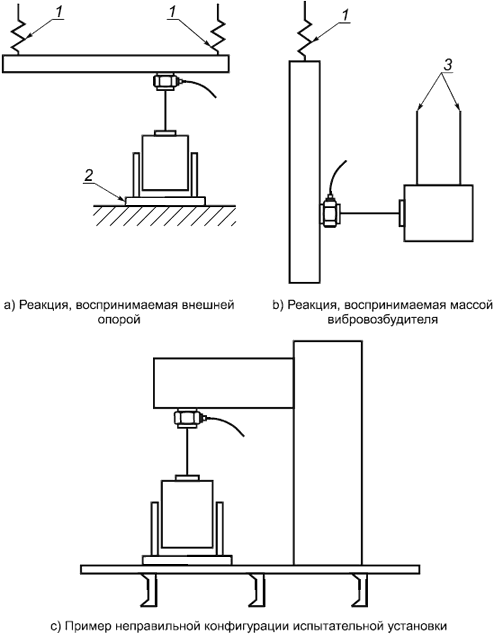
1 - подвес испытуемой конструкции; 2 - опора вибровозбудителя; 3 - подвес вибровозбудителя
Рисунок 3 - Реакция на возбуждение при разных конфигурациях испытательной установки
6.4.3 Учет момента инерции преобразователя
Нежелательные моменты сил возникают в каждой точке крепления преобразователей как результат углового ускорения преобразователей. Особенно это важно в случае импедансных головок, которые обладают большим моментом инерции. Такие нежелательные воздействия должны быть сведены до минимума за счет выбора преобразователей с малым моментом инерции относительно точек их крепления.
6.4.4 Ограничения на крепление вибровозбудителя
Нежелательные моменты сил и поперечные силы появляются в точке крепления вибровозбудителя вследствие работы устройств, ограничивающих угловую и поперечную составляющие вибрации в точке возбуждения. Так, влияние крепления системы "вибровозбудитель - импедансная головка" может отрицательно повлиять на измерения низкочастотных мод вибрации испытуемой конструкции.
Для более точного определения места приложения вынуждающей силы к конструкции могут использоваться сужающие конусы, однако при их применении следует иметь в виду возможность появления нежелательных моментов силы.
Влияние устройств крепления особенно существенно и трудноустранимо при измерении механической подвижности легких конструкций.
Отсутствие значительных погрешностей измерений, связанных с устройствами крепления вибровозбудителя, проверяют по выполнению следующего условия. Значения входных механических подвижностей для поперечной и угловой вибрации устройства крепления (определяемые, когда вибровозбудитель и устройство крепления отсоединены от испытуемой конструкции) должны, по крайней мере, в десять раз превышать значения соответствующих членов матрицы подвижностей самой конструкции во всем диапазоне частот испытаний. При отсутствии числовых данных, позволяющих выполнить указанную проверку, вопрос наличия или отсутствия значительных погрешностей, связанных с креплением вибровозбудителя, решается на основе опыта проведения испытаний данного вида. В качестве мер снижения погрешностей можно рекомендовать следующие:
- использовать вибровозбудитель с плавающей звуковой катушкой (см. [5]);
- использовать такое устройство опоры вибровозбудителя, при котором реакция на силу, приложенную к испытуемой конструкции, не будет вызывать ни углового движения вибровозбудителя, ни перемещений в направлении, поперечном оси чувствительности преобразователя силы;
- использовать толкатель, соединяющий вибровозбудитель с преобразователем силы.
Толкатель (см. [6]) должен иметь значительную жесткость в осевом направлении и быть достаточно гибким по остальным направлениям. Для этого часто используются короткие тонкие стержни, однако применение толстых стержней с гибкими тонкими элементами на обоих концах может дать лучшие результаты. Особое внимание должно быть уделено соосности вибровозбудителя, толкателя и преобразователя силы.
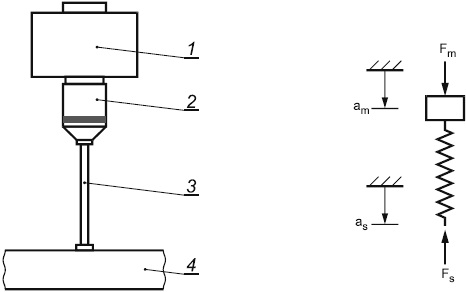
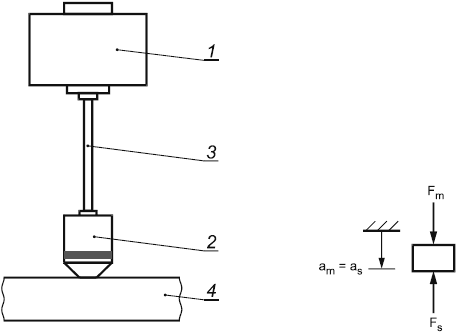
При использовании гибких толкателей акселерометр устанавливают непосредственно на поверхности конструкции в точке измерений. Не допускается установка акселерометра на конструкцию через промежуточное устройство, например толкатель, осевая податливость которого приведет к неверным результатам измерения характеристик отклика [см. рисунок 4а)]. Преобразователь силы должен быть установлен так, чтобы он измерял силу, переданную через толкатель на конструкцию [см. рисунок 4b)]. Только в крайних случаях допустимо устанавливать преобразователь силы между толкателем и вибровозбудителем [см. рисунок 4с)], поскольку при этом необходимо будет учитывать влияние податливости толкателя, как описано в ИСО 7626-1:2011 и компенсацию массы стержня в соответствии с 7.3. Допустимый вариант соединения с использованием толкателя и импедансной головки показан на рисунке 4d), но при этом следует иметь в виду невозможность компенсации момента вращения импедансной головки, который может оказать особенно большое влияние на измерения характеристик гибких конструкций.
Примечание - На результаты измерений механической подвижности может оказать влияние наличие собственных частот изгибных колебаний толкателя в диапазоне частот испытаний. Кроме того, на конструкцию могут воздействовать моменты сил, связанные с изгибными колебаниями подвижной системы вибровозбудителя. Эти моменты сил не могут быть определены с помощью применяемого датчика силы, но они способны повлиять на результаты измерений отклика.
|
Примечание - Критерием правильности выбора вибровозбудителя может служить значение функции когерентности сигналов возбуждения и отклика. Правила определения функции когерентности установлены в приложении А.
а)
|
Примечание - Критерием правильности выбора вибровозбудителя может служить значение функции когерентности сигналов возбуждения и отклика. Правила определения функции когерентности установлены в приложении А.
b)
Рисунок 4, лист 1 - Реакция на возбуждение при разных конфигурациях испытательной установки
|
Примечание - Критерием правильности выбора вибровозбудителя может служить значение функции когерентности сигналов возбуждения и отклика. Правила определения функции когерентности установлены в приложении А.
с)
|
Примечание - Критерием правильности выбора вибровозбудителя может служить значение функции когерентности сигналов возбуждения и отклика. Правила определения функции когерентности установлены в приложении А.
d)
1 - вибровозбудитель; 2 - импедансная головка; 3 - толкатель; 4 - испытуемая конструкция; 5 - преобразователь силы; 6 - акселерометр
Рисунок 4, лист 2
7 Измерение вынуждающей силы и отклика конструкции
7.1 Общие положения
Основные критерии и требования к выбору преобразователей вибрации, силы и импедансных головок, а также способы определения характеристик этих преобразователей установлены в ИСО 7626-1. Расчет вынуждающей силы по результатам измерений величин, описывающих работу вибровозбудителя (таких как электрическое напряжение или сила тока в катушке возбуждения), допускается только при наличии всех соответствующих калибровок (включая определение чувствительности к влияющим факторам). Однако предпочтительными являются измерения силы с помощью преобразователя силы.
При измерениях частотных характеристик конструкций наиболее часто используют пьезоэлектрические акселерометры, пьезоэлектрические преобразователи силы, а также импедансные головки, сочетающие в себе два вышеперечисленных преобразователя. Вместо акселерометров могут применяться преобразователи скорости или перемещения, особенно датчики перемещения бесконтактного типа. При использовании импульсного возбуждения определенными преимуществами обладают пьезорезистивные акселерометры. При выборе того или иного преобразователя особое внимание следует обратить на линейность его характеристик в заданном динамическом диапазоне, соответствие области рабочих частот диапазону частот испытаний и наличие низкой чувствительности к деформации основания.
Преобразователь вибрации любого типа позволяет получить любую характеристику движения на частоте возбуждения c помощью коэффициента преобразования вида
![]() , (1)
, (1)
где ![]() - мнимая единица;
- мнимая единица;
- целочисленная величина, принимающая значения
-2 при преобразовании от ускорения к перемещению,
-1 при преобразовании от ускорения к скорости и от скорости к перемещению,
1 при преобразовании от перемещения к скорости и от скорости к ускорению и
2 при преобразовании от перемещения к ускорению.
7.2 Крепление преобразователей
Как правило, используются два способа крепления к конструкции преобразователей силы и вибрации: на шпильку с нанесенной резьбой и с помощью клеящего состава. Подробные рекомендации по установке преобразователей приведены в [2], [7], [8] и [9].
Вынуждающая сила должна передаваться на испытуемую конструкцию, насколько это возможно, непосредственно через преобразователь силы или импедансную головку с минимальным уровнем помех. При неровной поверхности конструкции в месте установки преобразователя следует применять металлические монтажные фланцы соответствующей формы. Для улучшения сцепления поверхностей преобразователя и конструкции и более точного измерения высокочастотных составляющих рекомендуется в месте контакта преобразователя с конструкцией нанести тонкий слой вязкой жидкости (тяжелого масла или консистентной смазки). Следует учитывать влияние податливости крепления, как указано в ИСО 7626-1. При установке преобразователя силы на шпильку момент затяжки должен соответствовать рекомендациям изготовителя.
7.3 Инерционная нагрузка и компенсация массы
Нагрузку массы преобразователей и крепежных приспособлений на конструкцию в точке возбуждения целесообразно, особенно для легких конструкций, компенсировать электронным способом. Такая компенсация эффективна, когда значение входной подвижности испытуемой конструкции превышает ![]() для всех частот
для всех частот , Гц, в пределах диапазона частот испытаний, где масса
, кг, представляет собой сумму массы крепежных приспособлений и эффективной массы преобразователя силы или импедансной головки, как указано в ИСО 7626-1.
При невыполнении указанного критерия целесообразно воспользоваться процедурой, известной как "исключение массы", суть которой состоит в следующем. Полученное ускорение в точке возбуждения умножают (в аналоговой или цифровой форме) на полную эффективную массу, которую необходимо компенсировать. Результат умножения представляет собой часть вынуждающей силы, которую нужно приложить, чтобы возбудить с заданным ускорением массу, добавленную к конструкции в точке возбуждения. Его также в аналоговой или цифровой форме вычитают из сигнала преобразователя силы, в результате чего получают сигнал "чистой" вынуждающей силы, действующей на саму конструкцию.
Если под преобразователем силы в точке возбуждения установлен акселерометр [как показано на рисунках 4b) и 4с)], то его масса также должна учитываться при определении полной эффективной массы .
При измерении входной подвижности процедуру "исключения массы" выполняют с помощью того же акселерометра, что установлен в точке возбуждения для измерения отклика конструкции. При измерении переходной подвижности для выполнения данной процедуры требуется помимо акселерометра для измерения отклика использовать также дополнительный акселерометр в точке возбуждения.
Процедура "исключения массы" способна компенсировать только поступательную инерционную нагрузку на конструкцию и не пригодна для компенсации моментов сил. Последние, равно как и воздействия других нежелательных сил, могут быть только уменьшены путем подбора преобразователей с низкими инерционными свойствами. Некомпенсированные инерционные нагрузки способны вызвать смещение пиков частотной характеристики.
Среди мер, помогающих снизить воздействие нежелательных нагрузок на конструкцию, приоритет перед процедурой "исключения массы" следует отдавать правильному подбору преобразователей и крепежных приспособлений. Кроме того, во избежание больших погрешностей измерения указанную процедуру следует применять только в случаях, когда отношение эффективной массы крепежных приспособлений и преобразователей к свободной эффективной массе испытуемой конструкции в точке возбуждения превышает 0,05, но менее 0,5.
7.4 Усилители сигнала
Применение пьезоэлектрических преобразователей силы и вибрации требует использования усилителей зарядов или усилителей напряжения с большим входным сопротивлением.
Примечание 1 - Современные пьезоэлектрические преобразователи имеют встроенные усилители заряда.
Примечание 2 - На коэффициент преобразования усилителя напряжения может влиять сопротивление кабеля преобразователя. Усилители напряжения имеют более строгие ограничения по низкочастотной характеристике, чем усилители заряда.
7.5 Калибровка
7.5.1 Общие положения
В задачах измерения механической подвижности конструкции важно знать не только значения коэффициентов преобразования (основные калибровки) преобразователей, но и коэффициенты чувствительности к влияющим факторам (дополнительные калибровки). Требования к основным и дополнительным калибровкам содержатся в разделах 7 и 8 ИСО 7626-1. Основные калибровки преобразователей всех видов рекомендуется проводить один раз в год.
Примечание - Основные процедуры калибровок описаны в [1] и [3].
Текущую проверку калибровки измерительной цепи в целом проводят в начале каждой серии испытаний в соответствии с 7.5.2 и повторяют в конце каждой серии.
7.5.2 Проверка калибровки при испытаниях
Проверку калибровки измерительной цепи выполняют путем измерения подвижности (ускоряемости) свободно подвешенного жесткого калибровочного блока известной массы. Все элементы измерительной системы должны быть соединены точно так же, как и при проведении испытаний. Полученное в результате измерений значение частотной характеристики калибровочного блока должно находиться в пределах ±5% ее известного истинного значения [например, для ускоряемости это значение равно , а для подвижности -
![]() , где
, где - известная масса калибровочного блока]. При проверке калибровки необходимо использовать те же крепежные приспособления, что и при испытаниях, чтобы можно было определить погрешности, связанные с податливостью креплений (см. ИСО 7626-1). Массу калибровочного блока следует выбирать таким образом, чтобы ее подвижность соответствовала диапазону измерений подвижности в ходе испытаний. При необходимости проводят несколько измерений для калибровочных блоков разной массы, позволяющих охватить весь диапазон измерений частотной характеристики.
8 Обработка сигналов преобразователей
8.1 Определение частотной характеристики
8.1.1 Общие положения
Сигналы с преобразователей силы и вибрации поступают в анализатор, где осуществляется их фильтрация и, при необходимости, коррекция (процедура "исключения массы"), определяется отношение их амплитуд и сдвига фазы для всех частот в диапазоне частот испытаний. Анализатор может выполнять также преобразование одной измеренной частотной характеристики в другую, например ускоряемости в подвижность (см. 7.1). Требования к обработке сигналов для разных видов возбуждения, описанных в 6.2, рассматриваются в 8.1.2 и 8.1.3.
8.1.2 Гармоническое возбуждение
Значение амплитудно-частотной характеристики на частоте возбуждения определяется в аналоговом или цифровом виде как отношение амплитуд сигналов вибрации и силы. Фаза частотной характеристики определяется путем измерения разности фаз между этими сигналами.
8.1.3 Многочастотное возбуждение
Сигналы преобразователя, генерируемые случайным, псевдослучайным, периодически случайным, периодическим с линейной частотной модуляцией или импульсным возбуждениями, обрабатываются анализатором с использованием цифрового преобразования Фурье. Как описано в ИСО 7626-1, частотную характеристику получают делением взаимной спектральной плотности сигналов вибрации и силы на собственную спектральную плотность вынуждающей силы, при этом сигналы вибрации и силы подвергаются предварительной обработке во временной области (взвешиванию), как указано в 8.4.3. Для соблюдения требования, чтобы относительная погрешность определения входной частотной характеристики на каждой частоте резонанса не превышала 5%, выполняют усреднение по достаточному числу спектров (см. приложение А). При вычислении переходной частотной характеристики число усредняемых спектров должно быть, по крайней мере, не меньшим.
Примечание 1 - При измерениях переходной подвижности иногда невозможно достичь заданной точности, особенно когда отклик измеряется в точке и направлении, соответствующих малым значениям переходной подвижности. В подобных ситуациях эффект дальнейшего увеличения числа усредняемых спектров будет незначителен.
Примечание 2 - Для получения одной частотной характеристики при данном способе возбуждения необходимо использовать, по крайней мере, двухканальный Фурье-анализатор. При необходимости одновременного измерения нескольких частотных характеристик число каналов должно быть увеличено.
8.2 Фильтрация
8.2.1 Гармоническое возбуждение
Для уменьшения погрешностей измерения частотную характеристику следует рассчитывать по составляющим вибрации и силы только на частоте возбуждения. В связи с этим для повышения точности обработки целесообразно применять синхронное накопление сигналов или использовать фильтры, подавляющие нежелательные составляющие сигналов и шум, но при этом не вносящие фазовых искажений.
Примечание - Для целей фильтрации традиционно используют следящий фильтр - согласованное по фазе узкополосное аналоговое устройство, использующее гетеродинный принцип автоматической подстройки под частоту входного сигнала. Другим способом фильтрации является синхронное накопление сигнала, заключающееся в суммировании значений выборки сигнала синхронно с частотой возбуждения и осуществляющееся обычно в цифровом виде.
8.2.2 Многочастотное возбуждение
При данном виде возбуждения повышения отношения сигнал/шум можно добиться за счет ограничения полосы анализа и использования соответствующих фильтров, как указано в 9.4.3. При использовании цифровых анализаторов во избежание эффекта наложения спектров необходимо применять согласованные по фазе антиалайзинговые фильтры с высокой крутизной характеристики в области верхней частоты среза.
8.3 Согласование по динамическому диапазону сигнала
Для обеспечения правильности измерений необходимо систематически проверять настройки усиления, позволяющие избежать ограничения (насыщения) сигнала. Индикатор перегрузки анализатора реагирует только на превышение уровня сигнала в самом анализаторе, поэтому, как показано на рисунке 1, для контроля сигналов на предшествующих анализатору стадиях обработки используется осциллограф.
Примечание - Ограничение сигнала может быть определено визуально по появлению среза вершин (впадин) сигнала на экране осциллографа.
8.4 Разрешение по частоте
8.4.1 Общие положения
Разрешение по частоте должно быть достаточно высоким для того, чтобы выявить все собственные частоты испытуемой конструкции в диапазоне частот испытаний и получить точную оценку модального демпфирования. Частота выборки должна по крайней мере в десять раз превышать значение верхней границы диапазона частот испытаний.
8.4.2 Гармоническое возбуждение
Для разрешения резонансных частот при синусоидальном возбуждении с медленным сканированием или дискретно изменяющейся частотой необходимо, чтобы скорость изменения частоты возбуждения была достаточно мала (см. 9.2).
8.4.3 Многочастотное возбуждение
Для получения необходимого разрешения по частоте при возбуждении, описанном в 6.2.4 и 6.2.5, требуется обеспечить достаточно малую дискретизацию по частоте при использовании дискретного преобразования Фурье. Требуемое спектральное разрешение (расстояние между соседними составляющими в спектре) определяется плотностью расположения мод конструкции и коэффициентами модального демпфирования. Ограничение длины записи (размера блока выборки сигнала) приводит к уширению реальных составляющих спектра и появлению боковых гармоник. Данный эффект может быть уменьшен посредством умножения сигнала на подходящую весовую функцию, например окно Ханна (такую операцию называют "хэннинг").
Примечание 1 - Если демпфирование в системе мало, то при вычислении спектров сигналов возбуждения и отклика во всем диапазоне частот испытаний число выборочных значений в блоке данных (размер выборки) должно быть велико. Как вариант, можно использовать Фурье-анализ в ограниченном диапазоне частот (так называемый режим "лупы" анализатора). При любом способе анализа общее время выборки (длина записи) будет обратно пропорционально требуемому разрешению по частоте.
Примечание 2 - Случайное возбуждение можно рассматривать как последовательность импульсных функций во времени (подход на основе применения интеграла Дюамеля). Тогда ясно, что данные в начале блока выборки сигнала отклика представляют собой, главным образом, результат предшествующего возбуждения, в то же время в конце блока выборки данные отклика на соответствующий импульс возбуждения усечены. Это приводит к тому, что когерентность сигналов возбуждения и отклика в начале и в конце блока выборки падает. Иногда для повышения когерентности рекомендуют использовать окно Ханна, однако низкая когерентность сигналов возбуждения и отклика в целом характерна для случайного возбуждения.
8.4.4 Периодическое возбуждение
Проблема, описанная в 8.4.3, примечание 2, не относится к периодическому возбуждению, поскольку при данном виде возбуждения происходит согласование данных в конце и начале блока выборки и спустя некоторое время в каждом блоке данных присутствует вся информация о сигнале отклика. В некоторых случаях используют функцию когерентности (см. приложение А), чтобы оценить внешний шум и необходимость его подавления за счет процедур усреднения.
9 Управление возбуждением
9.1 Общие положения
Целью управления возбуждением является получение требуемого разрешения по частоте при сохранении отклика в пределах динамического диапазона измерительной системы.
9.2 Длительность гармонического возбуждения
9.2.1 Общие положения
При гармоническом возбуждении со сканированием частоты или при возбуждении на фиксированных частотах для достижения требуемого разрешения по частоте управляют соответственно скоростью изменения частоты возбуждения или длительностью возбуждения на фиксированной частоте и шагом приращения частоты возбуждения. Управление должно обеспечить высокое разрешение по частоте в окрестностях резонансов (пиков частотной характеристики) и антирезонансов (впадин частотной характеристики). Особенно это важно при необходимости последующего определения модальных характеристик конструкции.
9.2.2 Гармоническое возбуждение на фиксированных частотах
При дискретном изменении частоты гармонического возбуждения разница между резонансной частотой конструкции и ближайшей к ней частотой возбуждения (максимальная погрешность определения частоты резонанса) составит не более половины шага приращения частоты. Несовпадение частот возбуждения и резонанса может привести к занижению пикового значения характеристики и завышению, в свою очередь, коэффициента модального демпфирования. Максимальные погрешности измерения отклика конструкции на резонансе, обусловленные конечным разрешением по частоте, приведены в таблице 1.
Шаг приращения частоты в диапазоне ±10% значения резонансной частоты следует выбирать таким образом, чтобы погрешности измерения пикового значения характеристики (модуля) и коэффициента модального демпфирования находились в пределах 5%. Расчет максимально допустимого приращения частоты в зависимости от частоты резонанса и коэффициента модального демпфирования приведен в приложении В. Там же дан расчет минимального времени возбуждения на каждой фиксированной частоте (время выдержки). Для частот возбуждения, находящихся за пределами диапазона ±10% резонансной или антирезонансной частоты, допустимо использовать большие приращения частоты и меньшее время выдержки.
Таблица 1 - Максимальная относительная погрешность измерения отклика на резонансе при использовании возбуждения на фиксированных частотах
Отношение шага приращения частоты возбуждения к половине ширины резонансной кривой на уровне 0,7 | Максимальная относительная погрешность | |
% | дБ | |
>1 | >29,3 | >3,0 |
1 | 29,3 | 3,0 |
1/2 | 10,6 | 1,0 |
1/3 | 5,1 | 0,5 |
1/4 | 3,0 | 0,3 |
1/5 | 1,9 | 0,2 |
1/6 | 1,4 | 0,1 |
1/7 | 1,0 | 0,1 |
1/8 | 0,7 | 0,1 |
Примечание - Погрешность рассчитана по формулам из [11] с применением некоторых поправок для повышения точности вычислений. | ||
9.2.3 Гармоническое возбуждение с медленным сканированием частоты
При данном виде возбуждения частота возбуждения изменяется со временем по линейному или логарифмическому закону. Во всех случаях скорость развертки должна выбираться таким образом, чтобы в диапазоне ±10% резонансной частоты погрешность измерения отклика (модуля частотной характеристики) не превышала 5%.
При линейном сканировании максимальную скорость изменения частоты ![]() , Гц/мин, определяют по формуле
, Гц/мин, определяют по формуле
![]() . (2)
. (2)
При логарифмическом сканировании максимальную скорость изменения частоты ![]() , октава/мин, определяют по формуле
, октава/мин, определяют по формуле
![]() . (3)
. (3)
В формулах (2) и (3) использованы следующие обозначения:
- оценочное значение резонансной частоты (собственной частоты
-й моды вибрации конструкции);
- оценочное значение добротности данной моды.
Примечание - Формулы (2) и (3) взяты из [11]. Их применение обеспечивает соблюдение условий квазиустановившегося отклика конструкции.
9.3 Длительность многочастотного возбуждения
Длительности возбуждения и измерения отклика должны быть достаточными, чтобы иметь возможность произвести усреднение по набору спектров, как указано в 8.1.3.
Число усредняемых спектров зависит от отношения сигнал/шум измерительной системы и должно обеспечить относительную погрешность измерений не более 5%. Для определения необходимого числа усредняемых спектров используется функция когерентности между сигналами возбуждения и отклика (см. раздел А.1).
Время возбуждения (в секундах), необходимое для получения каждого спектра, обратно пропорционально разрешению по частоте (в герцах) в дискретном преобразовании Фурье (см. примечание 1 к 8.4.3).
9.4 Динамический диапазон
9.4.1 Общие положения
Для конструкций с малым демпфированием разброс значений механической подвижности во всем диапазоне частот испытаний измерений может превышать 100 дБ (10:1). В то же время для каждого канала передачи данных помимо верхней границы рабочего напряжения, за которой наступает ограничение (насыщение) сигнала, существует также нижняя граница, обусловленная наличием помех в системе измерения, а также (для цифровых систем) погрешностями аналого-цифрового преобразования (так называемый шумовой порог). Управление возбуждением должно быть таким, чтобы сигналы силы и вибрации не выходили за указанные границы для каналов измерения. Рекомендации по управлению уровнем возбуждения для обеспечения требуемой точности измерений при использовании возбуждений разных видов приведены в 9.4.2 и 9.4.3.
9.4.2 Гармоническое возбуждение
При постоянной амплитуде вынуждающей силы максимально достижимый динамический диапазон измерения подвижности определяется динамическим диапазоном канала измерения отклика (для существующих измерительных систем данное значение близко к 50 дБ или 300:1). Для того чтобы расширить диапазон измерений, необходимо уменьшить амплитуду возбуждения в окрестностях резонансной частоты (пикового значения отклика) и увеличить в окрестностях антирезонансной частоты (впадины кривой характеристики отклика). На рисунках 5а), 5с) и 5е) показаны ограничения динамического диапазона измерений и искажения частотной характеристики, возникающие при возбуждении с постоянной амплитудой: уменьшение пиковых значений вследствие ограничения сигнала и подъем впадин вследствие наличия шума. Рисунки 5b), 5d) и 5f) иллюстрируют правильное управление амплитудой вынуждающей силы в соответствии с диапазоном изменения измеряемой частотной характеристики.
9.4.3 Многочастотное возбуждение
Принцип управления возбуждением одного из видов, описанных в 6.2.4 и 6.2.6, тот же, что указан в 9.4.2 и проиллюстрирован рисунками 5b), 5d) и 5f). Как минимум, следует избегать наличия частотных составляющих за пределами диапазона частот испытаний. Если измерения в целях повышения разрешения по частоте проводят в ограниченном диапазоне частот (режим "лупы"), то возбуждение должно быть ограничено этим диапазоном с помощью соответствующих фильтров нижних и верхних частот (см. 8.4.3).
10 Контроль правильности выполнения измерений
В разделе А.1 описаны способы определения минимально необходимого числа усредняемых спектров для обеспечения требуемой точности измерений при использовании возбуждения случайного вида. Дополнительные испытания, распространяющиеся на все виды возбуждения, описаны в разделах А.2-А.4. Эти испытания позволяют получить полезную информацию о диапазоне линейности, выполнении принципа взаимности и достоверности результатов измерений.
Если результаты измерений отображаются графопостроителем на бумажной ленте, как установлено ИСО 7626-1, то следует проверить правильность установки бумажной ленты по методике для данного графопостроителя.
|
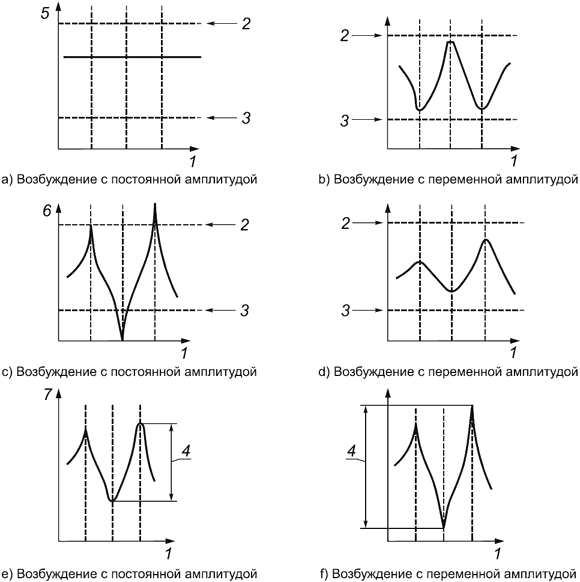
1 - частота; 2 - максимальный уровень возбуждения; 3 - шумовой порог; 4 - достижимый динамический диапазон; 5 - истинное значение амплитуды (спектральной плотности мощности) силы; 6 - истинное значение амплитуды (спектральной плотности мощности) ускорения; 7 - результат измерений частотной характеристики
Рисунок 5 - Пример повышения динамического диапазона за счет использования возбуждения переменного уровня
11 Определение модальных характеристик
Часто измерения механической подвижности проводят с целью определить модальные характеристики испытуемой конструкции. Детальное рассмотрение данного вопроса выходит за рамки настоящего стандарта. Некоторые общие принципы определения модальных характеристик изложены в приложении С.
Приложение А
(обязательное)
Проверка правильности выполнения измерений
А.1 Когерентность
При воздействии на конструкцию негармоническим возбуждением (см. 6.2.4 и 6.2.5) следует рассчитывать функцию когерентности ![]() между сигналами возбуждения и отклика для контроля возможных погрешностей измерений частотной характеристики. При расчете функции когерентности необходимо производить усреднение, как минимум, по двум выборкам.
между сигналами возбуждения и отклика для контроля возможных погрешностей измерений частотной характеристики. При расчете функции когерентности необходимо производить усреднение, как минимум, по двум выборкам.
Функцию когерентности рассчитывают по формуле
 , (А.1)
, (А.1)
где ![]() - взаимный спектр мощности для вынуждающей силы (входной сигнал) и отклика конструкции (выходной сигнал);
- взаимный спектр мощности для вынуждающей силы (входной сигнал) и отклика конструкции (выходной сигнал);
![]() ,
, ![]() - спектры мощности входного и выходного сигналов соответственно.
- спектры мощности входного и выходного сигналов соответственно.
Значение функции когерентности, как следует из определения, находится в пределах 0![]() 1. Ее типичный график показан на рисунке А.1.
1. Ее типичный график показан на рисунке А.1.
|
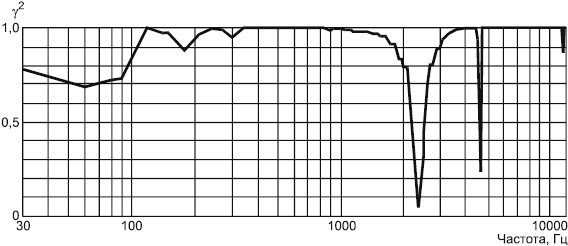
Рисунок А.1 - Типичный график функции когерентности
Если значения функции когерентности значительно отличаются от единицы, то это может указывать на одну из следующих проблем:
a) впадины функции когерентности на частотах резонанса и антирезонанса могут быть обусловлены:
- неправильным выбором разрешения по частоте (т.е. ширина полосы при анализе слишком велика; см. [12]), что приводит к смещенному результату измерений отклика (см. 8.4.3),
- неправильным выбором в анализаторе оконной функции во временной области (см. 8.4.3),
- нелинейностью испытуемой конструкции (см. А.2) или ограничением сигналов усилителями (см. 8.3),
- одновременным воздействием на конструкцию нескольких вынуждающих сил,
- шумами измерительной цепи (неправильный выбор уровня входного воздействия) или погрешностями аналого-цифрового преобразования;
b) впадины функции когерентности на резонансных частотах могут также указывать на то, что на этих частотах происходит падение вынуждающей силы, вызванное особенностью конструкции самого вибровозбудителя. Если входной сигнал не превышает шумовой границы, то значение частотной характеристики, вычисленное в соответствии с 8.1.3, окажется заниженным. Возможные способы решения такой проблемы рассмотрены в [13];
c) низкая когерентность в широком диапазоне частот указывает на малое отношение сигнал/шум. Она часто вызвана неадекватностью возбуждения динамическому диапазону и может быть улучшена путем соответствующего формирования спектра возбуждения (см. 9.4). При использовании возбуждения, описанного в 6.2.5, повысить отношение сигнал/шум можно также за счет синхронного накопления сигнала во временной области (см. [4]);
d) низкая когерентность на некотором участке частотного диапазона измерений может также быть вызвана определенного вида нелинейностью конструкции.
Низкое отношение сигнал/шум приводит к случайным погрешностям в вычислениях частотной характеристики. Данную погрешность можно уменьшить путем усреднения в частотной области. На рисунке А.2 показана зависимость относительной случайной погрешности определения модуля частотной характеристики в зависимости от числа усредненных спектров при данном значении функции когерентности. Из него видно, что, например, при значении функции когерентности 0,8 для того, чтобы относительная погрешность не превысила 5%, следует провести усреднение по 75 спектрам.
Примечание 1 - Кривые на рисунке А.2 построены по результатам анализа, выполненного в [14].
Примечание 2 - Для расчета функции когерентности необходимо иметь для усреднения не менее двух выборок сигналов возбуждения и отклика. При наличии только по одной выборке расчет функции когерентности всегда будет давать единицу.
Примечание 3 - Высокое значение функции когерентности не всегда свидетельствует о достоверности результатов измерений. Оно может быть обусловлено, например, взаимным влиянием каналов измерения силы и вибрации.
|
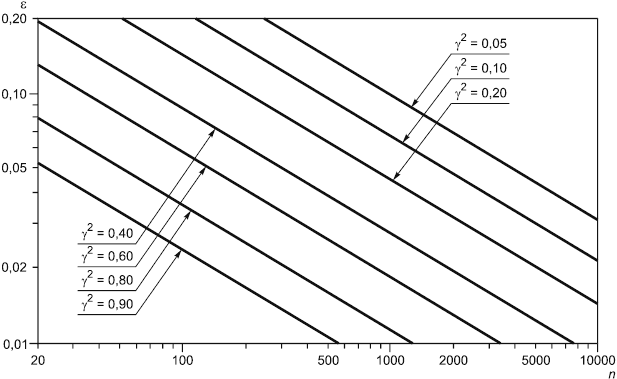
- относительная погрешность измерений модуля частотной характеристики;
- число усредняемых спектров
Рисунок А.2 - Зависимость относительной погрешности расчета частотной характеристики от числа усредняемых спектров
А.2 Линейность
А.2.1 Общие положения
Наличие болтовых соединений, зазоров между опорой и конструкцией и прочие особенности реальных конструкций могут вызвать нелинейность отклика. Для проверки возможной нелинейности необходимо проводить соответствующие испытания в каждой серии измерений согласно А.2.2.
А.2.2 Метод проверки
Проверка линейности состоит в следующем. Сначала проводят обычное измерение частотной характеристики с помощью выбранного вида возбуждения. После этого измерения повторяют, значительно увеличивая и уменьшая уровень возбуждения. Если результаты измерений частотной характеристики в экспериментах не совпадают, необходимо провести анализ для выявления причин несовпадения.
А.3 Принцип взаимности
Принцип взаимности в отношении линейных упругих конструкций означает равенство соответствующих членов матрицы подвижностей. Пусть проведено измерение ![]() комплексного отношения скорости в точке конструкции
комплексного отношения скорости в точке конструкции к вынуждающей силе в точке
на частоте
. Согласно принципу взаимности должно выполняться равенство
![]() , где результат нового измерения
, где результат нового измерения ![]() представляет собой отношение скорости в точке
представляет собой отношение скорости в точке , измеренной в направлении предыдущего возбуждения, к силе в точке
в направлении предыдущего измерения вибрации. Если в ходе проверки подтверждается выполнение принципа взаимности, то это служит признаком правильного выбора испытательного оборудования и метода испытаний.
Следует иметь в виду, что, хотя принцип взаимности выполняется для большинства конструкций, некоторые элементы, например гидродинамические подшипники, могут ему не подчиняться. Если такие элементы содержатся внутри испытуемой конструкции на пути распространения силового воздействия к точке отклика, то ![]() не будет равно
не будет равно ![]() .
.
А.4 Сопоставление измерений входной и переходной подвижностей
Для любой входной частотной характеристики обязательно наличие антирезонанса между каждой парой резонансов, что не всегда наблюдается для переходных характеристик. Если при измерениях входной частотной характеристики какой-либо антирезонанс между смежными резонансами отсутствует, то это является признаком несовершенства испытательной установки (например, небольшого смещения положения преобразователя вибрации относительно преобразователя силы), которое следует устранить.
Другой вид проверки правильности измерений входной подвижности основан на том, что фазовый угол частотной характеристики всегда должен находиться в диапазоне от минус 90° до плюс 90°. В отличие от этого фазовые углы переходных подвижностей могут попадать в любой из четырех квадрантов.
Приложение В
(обязательное)
Требования к шагу приращения частоты и длительности возбуждения
В.1 Шаг приращения частоты
Для точного определения отклика конструкции на любой из резонансных частот необходимо проводить измерения отклика на нескольких частотах в окрестности резонансной частоты. Погрешность, связанная с возбуждением на конечном числе равномерно распределенных частот, будет принимать значения от нуля до указанных в таблице 1 (см. 9.2.2), в зависимости от того, совпадает ли резонансная частота с одной из испытательных частот (нулевая погрешность) или будет находиться посередине между двумя соседними частотами возбуждения (максимальная погрешность).
Чтобы использовать таблицу 1 для определения максимально допустимого шага приращения частоты в окрестностях резонансной частоты , необходимо знать значение ширины резонансной кривой
на уровне половинной мощности. Величина
связана с резонансной частотой
и добротностью резонанса
соотношением
![]() . (В.1)
. (В.1)
Если погрешность не должна превышать 5% модуля частотной характеристики на частоте резонанса, то максимальный шаг приращения частоты в пределах ±10% резонансной частоты должен быть менее 0,32.
Примечание - Хотя таблица 1 составлена для случая гармонического возбуждения на фиксированных частотах, ее можно использовать также и при многочастотном возбуждении для определения спектрального разрешения, которое должен обеспечивать Фурье-анализатор.
В.2 Длительность возбуждения
После каждого дискретного изменения частоты возбуждения реакция конструкции представляет собой наложение переходного процесса на стационарный отклик. Амплитуда переходного процесса будет затухать по закону
![]() , (В.2)
, (В.2)
где - начальная амплитуда;
- половина ширины резонансной кривой на уровне 0,7 (половины мощности), Гц;
- время, с.
Обычно можно принять начальное значение амплитуды переходного процесса составляющим менее 10% амплитуды установившегося отклика. При таком допущении время
, с, необходимое для затухания переходного процесса до уровня менее 5% амплитуды
в установившемся состоянии, определяют из уравнения
![]() , (В.3)
, (В.3)
решение которого дает
![]() . (В 4)
. (В 4)
Таким образом, измерение на каждой последующей фиксированной частоте должно начаться не раньше (0,221/), с, после завершения измерения отклика на предыдущей фиксированной частоте. Длительность приложения возбуждения на каждой фиксированной частоте должна составлять сумму
и времени, необходимого для измерения сигналов силы и отклика конструкции.
Приложение С
(справочное)
Определение модальных характеристик
С.1 Требования к определению модальных характеристик
Для надежного применения любого из методов определения модальных характеристик (параметров), таких как, например, собственная частота или модальное демпфирование, по результатам измерений частотной характеристики, последние должны быть проведены в соответствующем динамическом диапазоне и при достаточно хорошем разрешении как по амплитуде, так и по фазе сигнала в области каждого резонанса. Влияние ошибок, связанных с неточным определением амплитуды и фазы в окрестности резонанса, может быть уменьшено соответствующими процедурами сглаживания, например методом подгонки окружности (см. [15]).
С.2 Методы определения формы моды
Определение формы моды по результатам измерений механической подвижности может быть выполнено одним из способов, указанных в С.2.1-С.2.3.
С.2.1 При возбуждении, прилагаемом в одной точке конструкции, определяют значения переходных подвижностей для всех заданных точек и направлений отклика. Полученные результаты измерений амплитуды и фазы для каждой частоты резонанса определяют форму соответствующей моды.
Примечание - Согласно принципу взаимности тот же результат должен быть получен при измерении в одной точке и направлении отклика, полученного в результате одновременного возбуждения конструкции во всех остальных заданных точках (см. А.3 в отношении условий невыполнения принципа взаимности).
С.2.2 Вначале на основе одного измерения подвижности определяют резонансные частоты конструкции. Затем последовательно возбуждают конструкцию на каждой резонансной частоте. В режиме возбужденного резонанса одним датчиком вибрации последовательно проводят измерения отклика для всех заданных точек и направлений.
Примечание - Данный метод обладает тем недостатком, что допускает пропуск одной или нескольких мод при случайном совпадении узла моды с точкой возбуждения или с точкой отклика.
С.2.3 Методы, описанные в С.2.1 и С.2.2, допускают различные модификации, например, за счет использования разных преобразователей в разных точках измерения отклика и многоканального анализатора сигналов или аналогичного сигнального процессора.
С.3 Моды угловой вибрации
Методы получения откликов в виде угловой вибрации с использованием поступательного возбуждения и результатов измерений поступательного движения конструкции рассмотрены в [16].
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 2041 | IDT | ГОСТ Р ИСО 2041-2012 "Вибрация, удар и контроль технического состояния. Термины и определения" |
ISO 7626-1:2011 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. | ||
Библиография
[1] | ISO 5347, Methods for the calibration of vibration and shock pick-ups |
[2] | ISO 5348, Mechanical vibration and shock - Mechanical mounting of accelerometers |
[3] | ISO 16063, Methods for the calibration of vibration and shock transducers |
[4] | Brown D., Carbon G., Ramsey K. Survey of Excitation Techniques Applicable to the Testing of Automotive Structures, Society of Automotive Engineers Paper No. 770029, 1977 |
[5] | Bouche R.K. Concepts and Transducers Used in Measuring Dynamic Mass, in Proceedings of Machinery Vibration Monitoring and Analysis Seminar, Vibration Institute, Clarendon Hills IL, 1979 |
[6] | Mitchell L.D., & Elliott K.B. How to Design Stingers for Vibration Testing of Structures, Sound and Vibration, (18-4) April 1984: pp.14-18 |
[7] | Brownjohn J.M.W., Steele G.H., Cawley P., Adams R.D. Errors in Mechanical Impedance Data Obtained with Impedance Heads. J. Sound Vibrat. 1980, 73 pp.461-468 |
[8] | Remmers G.M., & Belsheim R.O. Effects of Technique on Reliability of Mechanical Impedance Measurements. Shock and Vibration Bulletin. 1964 Dec, 34 (Part 3) pp.37-58 |
[9] | Ewins D.J. Measurement and Application of Mechanical Impedance Data, Parts 1, 2, and 3. J. Soc. Environ. Eng., Vol. 14.3, 15.1 and 15.2, Dec. 1975 - June 1976 |
[10] | Harris F.J. On the Use of Windows for Harmonic Analysis with the Discrete Fourier Transform. Proc. IEEE. 1978, 66 pp.51-83 |
[11] | Bozich D.J. Utilization of a Digital Computer for OnLine Acquisition and Analysis of Acoustic and Vibration Data. Shock and Vibration Bulletin. 1966 Feb., 35 (Part 4) pp.151-180 |
[12] | Walker A.W. The Effect of Bandwidth on the Accuracy of Transfer Function Measurements of Single Degree of Freedom System Response to Random Excitation. J. Sound Vibrat. 1981, 74 pp.251-263 |
[13] | Mitchell L.D. Improved Methods for the Fast Fourier Transform (FFT) Calculation of the Frequency Response Function, ASME Transactions. J. Mech. Des. 1982, 104 pp.277-279 |
[14] | Bendat J.S., & Piersol A.G. Random Data: Analysis and Measurement Procedures. Willeylnterscience, Fourth Edition, 2010, pp.311 |
[15] | Peterson E., & Klosterman A. Obtaining Good Results from an Experimental Modal Survey. J. Soc. Environ. Eng. (17-1), Mar. 1978: pp.3-10 |
[16] | Sattinger S.S. A Method for Experimentally Determining Rotational Mobilities of Structures. Shock and Vibration Bulletin. 1980, 50 (Part 2) pp.17-28 |
УДК 534.322.3.08:006.354 | ОКС 17.160 |
Ключевые слова: конструкция, динамическая характеристика, частотная характеристика, механическая подвижность, модальный анализ, вибровозбудитель, преобразователь вибрации, преобразователь силы, импедансная головка | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}