ГОСТ ИСО 11342-95
Группа Т59
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
МЕТОДЫ И КРИТЕРИИ БАЛАНСИРОВКИ
ГИБКИХ РОТОРОВ
Mechanical vibration. Methods and criteria
for the mechanical balancing of flexible rotors
ОКС 17.160
ОКСТУ 0016
Дата введения 1997-01-01
Предисловие
1 РАЗРАБОТАН Российской Федерацией
ВНЕСЕН Техническим секретариатом Межгосударственного Совета по стандартизации, метрологии и сертификации
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол N 8-95 от 12 октября 1995 г.)
За принятие проголосовали:
Наименование государства | Наименование национального органа по стандартизации |
Республика Белоруссия | Белстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Российская Федерация | Госстандарт России |
Республика Таджикистан | Таджикский государственный центр по стандартизации, метрологии и сертификации |
Туркменистан | Туркменглавгосинспекция |
Украина | Госстандарт Украины |
Разделы (подразделы, приложения) настоящего стандарта, за исключением 7.1.3 и приложения Н представляют собой аутентичный текст международного стандарта ИСО 11342-93
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 28 июня 1996 г. N 437 межгосударственный стандарт ГОСТ ИСО 11342-95 введен в действие в качестве государственного стандарта Российской Федерации с 1 января 1997 г.
4 ВВЕДЕН ВПЕРВЫЕ
Введение
Целью балансировки ротора является снижение дисбаланса ротора, остаточное значение которого при любой частоте вращения, вплоть до максимальной, не должно вызывать превышения допустимых уровней вибрации машин и динамического прогиба ротора.
Во многих случаях потребитель оценивает качество ротора по результатам балансировки, т.е. до установки его в машину, ибо после этого доступ к нему затруднен. Эту предварительную оценку качества балансировки проводят на балансировочном оборудовании по уровню вибрации и динамическим реакциям опор на частоте вращения. Окончательную оценку проводят на месте эксплуатации машины в рабочем диапазоне частот вращения.
В настоящем стандарте устанавливается классификация роторов и методы их балансировки, введены критерии для оценки качества балансировки на балансировочном оборудовании. Они основываются либо на предельной вибрации работающей машины, либо на предельных значениях дисбаланса ротора. Если предельные значения не установлены, настоящий стандарт показывает, как их можно определить.
Методы и критерии, представленные в настоящем стандарте, являются обобщением опыта эксплуатации машин с гибкими роторами.
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт содержит указания, позволяющие избежать крупных дефектов машины так же, как и чрезмерно завышенных требований к балансировке, и может служить основой для исследований, например, если необходимо более точно определить требуемое качество балансировки. Стандарт не является руководством по приемке роторов в эксплуатацию.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 19534-74 Балансировка вращающихся тел. Термины
ГОСТ 22061-76 Машины и техническое оборудование. Системы классов точности балансировки
ГОСТ 24346-80 Вибрация. Термины и определения
ГОСТ 25364-88 Агрегаты паротурбинные стационарные. Нормы вибрации и общие требования к проведению измерений
ГОСТ 26875-86 Вибрация. Аппаратура переносная балансировочная. Технические требования
ГОСТ 27870-88 Вибрация. Оценка качества балансировки гибких роторов
3 ОПРЕДЕЛЕНИЯ
Термины - по ГОСТ 19534 и ГОСТ 24346.
4 ОБЩИЕ ПОЛОЖЕНИЯ
4.1 Распределение дисбалансов
Роторы могут быть сплошными, коваными или сварными, или сборными. Допуски и их соблюдение при обработке сплошных роторов, метод сборки и дисбаланс деталей сборных роторов в значительной степени влияют на величину и распределение дисбаланса ротора.
Поскольку распределение дисбалансов в роторе, как правило, случайно, то распределение начального и остаточного дисбалансов вдоль оси однотипных роторов не только не совпадает, но обычно значительно отличается. Распределение дисбалансов определяет степень возбуждения различных собственных мод вибрации ротора, так как неуравновешенные силы определяют динамический прогиб ротора.
Если плоскости коррекции не совпадают с плоскостями, в которых имеется дисбаланс, это может вызвать вибрацию на частотах вращения, отличных от тех, на которых проводили балансировку. При этом уровень вибрации может превосходить допустимое значение, особенно на критических частотах вращения.
Кроме того, следует учитывать, что роторы, работающие в условиях температурных воздействий, могут испытывать тепловые деформации, вызывающие изменения начального дисбаланса.
4.2 Собственные моды вибрации
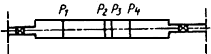
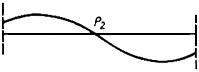
Если демпфирование ротора пренебрежимо мало, то в случае его опирания на изотропные подшипники моды представляют собой плоские кривые, вращающиеся вокруг оси ротора. На рисунке 1 показаны характерные кривые трех первых собственных мод ротора постоянного сечения, опирающегося на податливые подшипниковые опоры.
Типовой ротор
Первая (основная) собственная мода
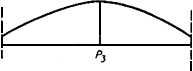
Вторая собственная мода
Третья собственная мода
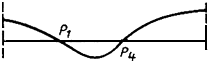
Рисунок 1 - Характерные собственные моды гибких роторов на податливых опорах
Для системы "ротор - подшипник с демпфированием" моды могут представлять собой пространственные кривые, вращающиеся вокруг оси ротора (рисунок 2).
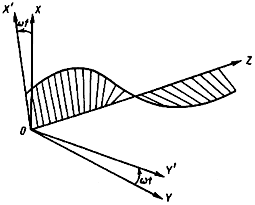
- неподвижная система координат;
![]() - система координат, вращающаяся вокруг оси
- система координат, вращающаяся вокруг оси с угловой скоростью
Рисунок 2
Во многих случаях, даже при наличии демпфирования, моды можно рассматривать как плоские кривые. Следует подчеркнуть, что возникающие моды и их интенсивность в значительной степени зависят от динамических характеристик и расположения подшипниковых опор ротора.
4.3 Воздействие дисбаланса на гибкий ротор
Распределение дисбаланса может быть выражено через эквивалентные дисбалансы. Амплитуду каждой моды определяют соответствующим эквивалентным дисбалансом. При вращении ротора на частоте, близкой к критической, мода, соответствующая этой частоте, является доминирующей по сравнению с остальными. Изгиб ротора определяют:
- значением эквивалентного дисбаланса;
- близостью рабочей частоты вращения к критической;
- демпфированием опор ротора.
Если уменьшить эквивалентный дисбаланс с помощью корректирующих масс, то амплитуда соответствующей моды также уменьшится. На этом основана методика балансировки по модам ротора.
Эффект воздействия на -ю собственную моду зависит от положения плоскостей коррекции. Рассмотрим в качестве примера случай, показанный на рисунке 1. Корректирующая масса, установленная на роторе в плоскости
, не окажет влияния на вторую собственную моду. Аналогично, корректирующая масса, установленная в плоскости
или в плоскости
, не окажет влияния на третью собственную моду. Корректирующая масса в плоскости
окажет максимальное воздействие на основную собственную моду.
4.4 Цель балансировки гибкого ротора
Цели балансировки определяют требованиями к эксплуатации машины. Перед балансировкой следует решить, какие критерии балансировки нужно использовать. Правильный выбор позволяет удешевить и обеспечить эффективность балансировки, а также удовлетворить требования заказчика.
Критерии балансировки выбирают из условия достижения требуемого ограничения:
- вибрации машины и динамического прогиба ротора;
- сил, действующих на подшипники.
Наиболее совершенный способ балансировки гибкого ротора состоит в уравновешивании каждого из его элементов.
В роторе, отбалансированном таким способом, не будет дисбалансов и моментов дисбалансов, и в нем при вращении не будут возбуждаться моды. Такой ротор будет удовлетворительно работать на всех частотах вращения.
Требуемое уменьшение распределенных дисбалансов достигается, как правило, путем подбора необходимого числа и величин корректирующих масс и соответствующего их размещения вдоль ротора. На практике и после балансировки всегда сохраняется некоторый распределенный остаточный дисбаланс. Вибрация (или неуравновешенные силы), вызываемые остаточным дисбалансом, должны быть уменьшены до допустимого уровня во всем диапазоне частот вращения, включая критические. Только в особых случаях можно ограничиться балансировкой гибкого ротора на одной частоте вращения. Независимо от используемой методики балансировки целью ее является получение сведений о дисбалансе и его распределении по длине ротора и уменьшение его влияния в диапазоне частот вращения до допустимого уровня.
4.5 Плоскости коррекции
Во многих случаях балансировку ротора проводят последовательно по собственным модам. В этом случае корректирующие массы размещают таким образом, чтобы на каждом последующем этапе балансировки добавление новых корректирующих масс не нарушало достигнутую уравновешенность по другим модам. Число необходимых корректирующих масс, размещаемых вдоль ротора, зависит от методики балансировки. Тем не менее, в общем случае, если рабочая частота вращения ротора превосходит критическую частоту вращения, необходимо использовать по меньшей мере (
+2) плоскостей коррекции.
На стадии проектирования ротора следует определить число плоскостей коррекции и их координаты вдоль оси ротора. На практике число плоскостей коррекции ограничивается особенностями конструкции ротора, а в случае балансировки на месте - возможностью доступа к ним.
4.6 Балансировка валопроводов
Валопровод имеет несколько критических частот вращения и собственных мод. Как правило, эти частоты не равны критическим частотам вращения роторов, составляющих валопровод, и не имеют простой зависимости от них. Более того, форма прогиба валопровода не обязательно находится в простой зависимости от мод составляющих его роторов. Таким образом, распределение дисбалансов вдоль валопровода теоретически следует определять в значениях эквивалентного дисбаланса валопровода, а не отдельных роторов.
На практике, однако, во многих случаях проводят балансировку роторов независимо от других роторов валопровода. В большинстве случаев это обеспечивает удовлетворительную работу валопровода. Применимость этого метода на практике определяется, в частности, соотношениями собственных мод и критических частот вращения валопровода и отдельно взятых роторов, а также распределением дисбалансов. В данном случае для балансировки валопровода высокую эффективность гарантирует метод балансировки с использованием коэффициентов влияния с учетом мод валопровода и отдельных роторов.
Балансировку валопроводов следует проводить с учетом факторов, изложенных в приложении А.
5 КЛАССИФИКАЦИЯ РОТОРОВ
Устанавливается пять классов роторов согласно таблице 1. Для каждого класса требуется своя методика балансировки. Методика определения типа ротора (гибкий - жесткий) приведена в приложении Е.
5.1 Класс 1. Жесткий ротор
Балансировка роторов этого класса может быть проведена с использованием двух произвольно выбранных плоскостей коррекции. При любой частоте вращения вплоть до максимальной рабочей остаточный дисбаланс жесткого ротора существенно не изменяется.
5.2 Класс 2. Квазижесткий ротор
Ротор этого класса не может рассматриваться как жесткий, но для его балансировки можно использовать методы балансировки жесткого ротора. Роторы класса 2 подразделяются на следующие подклассы:
- роторы, распределение дисбалансов которых известно (подклассы 2а, 2b, 2c, 2d, а также подкласс 2е, для которого распределение дисбаланса роторов известно лишь частично);
- роторы, распределение дисбалансов которых неизвестно (подклассы 2f, 2g, 2h).
Для этих гибких роторов возможна удовлетворительная низкочастотная балансировка. Некоторые виды роторов могут быть отнесены к нескольким подклассам настоящей классификации.
5.3 Класс 3. Гибкий ротор
Ротор этого класса не может быть отбалансирован по методике для жестких роторов - необходима высокочастотная балансировка. Роторы класса 3 разделены на подклассы согласно таблице 1.
Таблица 1 - Классификация роторов
Класс ротора | Описание класса | Пример |
Класс 1 (жесткие роторы) | Ротор, балансировка которого может быть произведена с помощью двух произвольно выбранных плоскостей коррекции, а его остаточный дисбаланс не изменяется значительно при любой частоте вращения вплоть до максимальной рабочей |
|
Класс 2 (квазижесткие роторы) | Гибкий ротор, поддающийся балансировке как жесткий на скоростях вращения ниже той, при которой возникает его значительный упругий прогиб | - |
Роторы с известным распределением дисбалансов вдоль ротора | ||
Подкласс 2а | Ротор, имеющий дисбаланс в одной плоскости (например, сосредоточенная масса на легком гибком валу, дисбалансом которого можно пренебречь) |
|
Подкласс 2b | Ротор, имеющий дисбаланс в двух плоскостях (например, две массы на легком валу, дисбалансом которого можно пренебречь) |
|
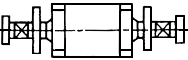
Подкласс 2с | Ротор, имеющий дисбаланс в более чем двух плоскостях |
|
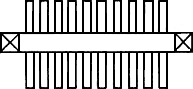
Подкласс 2d | Ротор, имеющий равномерно или линейно распределенный дисбаланс |
|
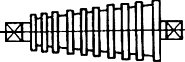
Подкласс 2е | Ротор, имеющий жесткую длинную часть и гибкие шейхи, дисбалансом которых можно пренебречь (роторы с жестким сердечником) |
|
Роторы с неизвестным распределением дисбалансов вдоль ротора | ||
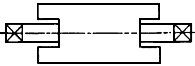
Подкласс 2f | Симметричный ротор, имеющий две плоскости коррекции на концах. Максимальная частота вращения значительно меньше второй критической частоты, а первая критическая частота вращения не входит в диапазон рабочих частот вращения. Ротор имеет начальный дисбаланс в допустимых пределах |
|
Подкласс 2g | Симметричный ротор, имеющий одну плоскость коррекции посередине и две на концах. Максимальная частота вращения значительно меньше второй критической частоты. Ротор имеет начальный дисбаланс в допустимых пределах |
|
Подкласс 2h | Асимметричный ротор с начальным дисбалансом в допустимых пределах. Балансировку осуществляют аналогично балансировке роторов подкласса 2f |
|
Класс 3 (гибкие роторы) | Роторы, требующие высокочастотной балансировки | - |
Подкласс 3а | Ротор, дисбаланс которого при любом распределении вызывает появление первой (основной) собственной моды вибрации |
|
Подкласс 3b | Ротор, дисбаланс которого при любом распределении вызывает появление только первой (основной) и второй собственных мод вибрации |
|
Подкласс 3с | Ротор, дисбаланс которого вызывает появление более двух первых собственных мод вибрации |
|
Класс 4 (роторы изменяющейся геометрией) | Ротор, который может быть отнесен к классам 1, 2 или 3, но имеющий один или несколько гибких или гибко связанных с ним элементов |
|
Класс 5 | Ротор, который может быть отнесен к классу 3, но в силу особых причин (например, экономических) балансируется только на рабочей частоте вращения |
|



5.4 Класс 4
К нему относятся роторы классов 1, 2 или 3 в случае, если они являются роторами с изменяющейся геометрией. Особенности этих роторов указаны в 4.2.
6 БАЛАНСИРОВКА РОТОРОВ КЛАССА 2
6.1 Общие положения
Роторы класса 2 - это гибкие роторы, которые могут быть отбалансированы как жесткие. Роторы этого класса занимают промежуточное положение между жесткими и гибкими роторами, балансировку которых осуществляют в соответствии с разделом 7.
На балансировочном станке с низкой частотой вращения проводят, как правило, только динамическую балансировку такого ротора как жесткого, т.к. на малых частотах его прогиб под действием дисбаланса и (или) наличия гибких элементов незначителен.
С помощью соответствующих методик можно отбалансировать ротор класса 2 при малых частотах на месте таким образом, что это обеспечит его удовлетворительную работу в диапазоне рабочих частот.
Значение остаточного модального дисбаланса после низкочастотной балансировки зависит от форм собственных мод ротора и расположения плоскостей коррекции относительно исходных дисбалансов вдоль оси ротора.
6.2 Выбор плоскостей коррекции
Если известно распределение дисбалансов вдоль ротора, то лучше всего выбрать плоскости коррекции как можно ближе к плоскости дисбаланса. Если же распределение дисбалансов неизвестно, то следует руководствоваться 4.5.
6.3 Балансировка составных роторов при сборке
Если ротор составлен из деталей, концентрически насаженных на вал, то можно применять низкочастотную балансировку по одной из ниже следующих методик.
Примечание - Некоторые роторы содержат набор типовых элементов (например, лопатки, соединительные болты, токосъемные детали и т.д.). Располагая эти элементы в зависимости от массы или массы и момента каждого отдельного элемента, можно добиться требуемой точности балансировки. Если после балансировки эти элементы требуют замены или подгонки, то порядок их размещения следует сохранять.
6.3.1 Балансировка роторов, собираемых из предварительно отбалансированных элементов
Каждый из элементов, включая вал, перед сборкой должен быть отбалансирован по методике балансировки жесткого ротора. На эксцентриситет посадочных поверхностей вала и прочие сборочные размеры, определяющие положение элементов относительно оси вала, должны быть заданы жесткие допуски. Аналогичные требования предъявляются к балансировочной оправке. Погрешности балансировки, в том числе из-за эксцентриситета посадочных поверхностей балансировочной оправки, можно устранить поэлементной балансировкой.
При балансировке вала и элементов ротора следует учитывать влияние всех деталей, вносящих асимметрию (например, шпонок), а также и не устанавливаемых при балансировке отдельных элементов ротора.
Рекомендуется оценить расчетом влияние погрешности сборки и эксцентриситета устанавливаемых деталей на достижимый начальный дисбаланс.
При расчете влияний погрешностей следует учитывать, что они могут суммироваться для ротора в целом.
6.3.2 Последовательная балансировка ротора, собираемого из несбалансированных элементов
Сначала балансируют вал. После этого ротор балансируют каждый раз после установки очередного элемента. Окончательную балансировку проводят после установки последнего элемента. Этот метод позволяет исключить необходимость проведения контроля эксцентриситета посадочных поверхностей и других характеристик, определяющих положение элементов на валу ротора.
Если используют этот метод, следует исключить влияние монтажа следующих элементов на уравновешенность уже смонтированных.
В отдельных случаях можно устанавливать одновременно два элемента, лежащих в одной поперечной плоскости, и проводить динамическую балансировку обоих элементов. В случаях, когда несколько элементов образуют однородный короткий и жесткий элемент или единый узел, например, секцию сердечника (которые, как правило, балансируют только по двум плоскостям), допускается узловая сборка с динамической балансировкой по двум плоскостям после установки каждого узла.
6.4 Эксплуатационная частота вращения ротора
Если в диапазон эксплуатационных частот вращения ротора входит или близка к нему критическая частота, то вышеизложенные методы следует применять с большой осторожностью.
6.5 Начальный дисбаланс
Если известно расположение начального дисбаланса вдоль ротора (подклассы 2а-2е), то его допустимый начальный дисбаланс ограничен только возможными значениями корректирующих масс в плоскостях коррекции. Методы балансировки таких роторов на низких частотах вращения согласно 6.6.1-6.6.5.
Если распределение начального дисбаланса вдоль ротора неизвестно (подклассы 2f-2h), то в общем случае нельзя заранее указать методику балансировки. Значение начального дисбаланса можно ограничить предварительно балансировкой отдельных элементов. Допустимый начальный дисбаланс ограничивается допустимой нагрузкой на подшипники, а также характеристиками всех элементов ротора. Методы балансировки роторов подклассов 2f-2h согласно 6.6.6-6.6.7.
6.6 Методы балансировки собранных роторов класса 2
6.6.1 Подкласс 2а: роторы, имеющие дисбаланс в одной плоскости
Если известно, что начальный дисбаланс сосредоточен в плоскости, совпадающей с плоскостью коррекции, то ротор может быть отбалансирован на любой частоте вращения. В этом случае балансировка на низких частотах вращения столь же эффективна, как на рабочей частоте вращения.
6.6.2 Подкласс 2b: роторы, имеющие дисбаланс в двух плоскостях
Если известно, что начальный дисбаланс сосредоточен в двух плоскостях, совпадающих с плоскостями коррекции, ротор может быть отбалансирован на любой частоте вращения. В этом случае балансировка на низких частотах вращения столь же эффективна, как на рабочей частоте вращения.
6.6.3 Подкласс 2с: роторы, имеющие дисбаланс в более чем двух плоскостях
Если ротор состоит из более чем двух элементов, разнесенных вдоль оси ротора, то, как правило, такой ротор имеет более двух плоскостей коррекции. Низкочастотная балансировка окажется достаточной, если соблюдают требования к сборке ротора и меры предосторожности, указанные в 6.3.
Следует отметить, что при сборке ротора могут возникать деформации вала. Они могут увеличиваться при работе с высокой частотой вращения.
В отдельных случаях при наличии значительного дисбаланса одного из элементов целесообразно выполнить его балансировку до установки, а затем провести балансировку ротора.
6.6.4 Подкласс 2d: роторы, имеющие равномерно или линейно распределенный дисбаланс
Если дисбаланс равномерно распределен по длине ротора (например, труба), то при соответствующем выборе двух плоскостей коррекции низкочастотной балансировкой можно добиться удовлетворительной работы ротора во всем диапазоне частот вращения.
Для определения положения плоскостей коррекции, обеспечивающих наиболее эффективную балансировку, следует провести испытания нескольких однотипных роторов, имеющих аналогичное осевое распределение дисбаланса.
Положение плоскости коррекции определяют расстоянием до подшипников. Оптимальное расстояние - 22% от расстояния между подшипниками для роторов со следующими характеристиками:
- межопорный ротор;
- ротор без консольных частей с равномерно распределенным дисбалансом;
- ротор с постоянной изгибной жесткостью по длине;
- ротор с симметричным расположением плоскостей коррекции относительно середины;
- ротор, рабочая частота вращения которого значительно ниже критической частоты.
Если балансировка с помощью двух плоскостей коррекции не дает удовлетворительных результатов, ротор может балансировать на низких частотах вращения с использованием трех плоскостей коррекции в соответствии с приложением В.
При этом необходимо рассчитывать долю начального дисбаланса ротора, который должен быть устранен в центральной плоскости коррекции.
6.6.5 Подкласс 2е: роторы с жестким сердечником
Так как дисбалансом гибких шеек можно пренебречь, ротор с жестким сердечником может быть отбалансирован на низких частотах вращения с помощью плоскостей коррекции, расположенных на жестком сердечнике.
6.6.6 Подкласс 2f: симметричные роторы с ограниченным начальным дисбалансом
Если каждый элемент ротора балансируют перед сборкой по 6.3.1, то можно ограничиться низкочастотной балансировкой, если начальный дисбаланс собранного ротора находится в допустимых пределах. Поскольку осевое распределение дисбаланса после сборки ротора неизвестно, а максимальная частота вращения роторов этого подкласса значительно отличается от второй критической частоты, самым неблагоприятным будет случай, когда углы дисбалансов элементов совпадают. В этом случае максимальное значение начального дисбаланса, который может быть устранен с помощью двух плоскостей коррекций, определяют опытным путем. При известных данных об изгибной жесткости вала, податливостях подшипников и т.д. полезно провести предварительный анализ влияния начальных дисбалансов на работу ротора с использованием математических моделей.
6.6.7 Подклассы 2g и 2h: роторы с ограниченным начальным дисбалансом
Опыт показывает, что симметричные роторы (подкласс 2g), отвечающие требованиям 6.6.6 и имеющие третью (дополнительную) центральную плоскость коррекции, могут быть отбалансированы на низких частотах вращения при условии, что их начальный дисбаланс не превышает удвоенный начальный дисбаланс, установленный в соответствии с 6.6.6.
Практика показывает, что от 30 до 60% начального дисбаланса следует устранять в центральной плоскости коррекции.
Для асимметричных роторов (подкласс 2h), не отвечающих требованиям 6.6.6, проведя анализ в соответствии с 6.6.6, можно установить максимальный допустимый начальный дисбаланс, поддающийся устранению в произвольно заданной плоскости. Однако значение рассчитанного таким образом допустимого начального дисбаланса может оказаться слишком малым, чтобы метод был применим на практике. В этом случае необходимо выбрать другой метод, например, последовательную балансировку (6.3.2).
7 БАЛАНСИРОВКА РОТОРОВ КЛАССОВ 3, 4, 5
7.1 Метод балансировки роторов класса 3
7.1.1 Общие положения
Существуют два метода балансировки роторов этого класса: балансировка по модам и метод коэффициентов влияния. В большинстве случаев на практике метод балансировки представляет собой сочетание обоих методов и преобладание того или иного из них определяется конкретными условиями. Один из таких методов балансировки приведен в 7.1.5, но следует иметь в виду, что в отдельных случаях возможны его модификации.
7.1.2 Опоры ротора
Динамические характеристики подшипниковых опор балансировочного оборудования следует подбирать, по возможности, таким образом, чтобы воспроизводились условия опирания ротора в машине. Благодаря этому моды вибрации ротора в эксплуатации будут воспроизведены и в балансировочном оборудовании, что исключает необходимость его балансировки на месте.
Если ротор имеет консоль значительной массы или малой жесткости, а в машине консоль опирается на собственную опору, то и при балансировке должна быть предусмотрена дополнительная опора.
7.1.3 Измерительная система
Для измерения вибрации ротора, подшипника или опоры или нагрузки на подшипник устанавливают соответствующие датчики. Система должна измерять амплитуду гармоники сигнала частотой вращения, а также фазу этой гармоники относительно произвольно выбранного фиксированного осевого сечения ротора. В качестве альтернативного варианта могут использоваться измерения косинусной и синусной составляющих гармоники.
Аппаратура, используемая для балансировки на месте установки машины, должна соответствовать следующим требованиям:
- погрешность измерения сдвига фазы виброскорости или виброперемещения на фиксированной частоте вращения не более ±1°;
- погрешность измерения частоты вращения ротора - не более ±11%, для роторов стационарных паротурбинных агрегатов - по ГОСТ 126875*;
_______________
* Вероятно ошибка оригинала. Следует читать ГОСТ 26875. - Примечание "КОДЕКС".
- основная приведенная погрешность измерения амплитудных значений составляющих виброперемещения и виброскорости на частоте, равной частоте вращения, - не более ±15%.
Датчики и устройства их крепления не должны иметь резонансов при любой частоте вращения в рабочем диапазоне.
7.1.4 Низкочастотная балансировка
Опыт показывает, что перед высокочастотной балансировкой целесообразно проводить низкочастотную балансировку особенно тех роторов, работа которых может происходить на первой критической частоте вращения. В общем случае низкочастотная балансировка необязательна и можно сразу приступить к высокочастотной балансировке.
7.1.5 Высокочастотная балансировка по модам изгиба ротора
Измерения векторов вибрации (или сил) проводят на частоте вращения. Высокочастотную балансировку выполняют следующим образом.
7.1.5.1 Привести ротор во вращение частотой, безопасной для работы, но близкой к первой критической. Обозначить эту частоту первой балансировочной.
Измерить векторы вибрации или сил в установившемся режиме вращения ротора. Перед обработкой данных следует удостовериться в их повторяемости, для чего может потребоваться несколько пусков ротора.
Примечание - Для роторов некоторых типов, например, роторов турбин, которые претерпевают изменения натягов дисков на частотах вращения, близких к критическим, рекомендуется предварительная балансировка, это позволит разогнать ротор до эксплуатационной частоты вращения или выше, чтобы диски заняли окончательное положение. Только после этого следует проводить окончательную балансировку.
7.1.5.2 Установить на ротор пробные грузы, подобранные таким образом, чтобы вызвать значительные изменения векторов исходной вибрации или сил на частоте первой моды.
Если низкочастотную балансировку роторов не проводили, то нужно установить один пробный груз. Если ротор симметричен, то груз следует устанавливать посередине ротора.
Если низкочастотная балансировка проведена, пробные грузы подобрать так, чтобы не нарушилась уравновешенность на низких частотах вращения.
7.1.5.3 Привести ротор во вращение по 7.1.5.1, измерить векторы вибрации (сил) и убедиться в повторяемости данных измерений.
7.1.5.4 По данным 7.1.5.1 и 7.1.5.3 вычислить динамические коэффициенты влияния на первой балансировочной частоте. После этого следует рассчитать корректирующие массы и их угловое положение. Установить корректирующие массы, сняв пробные грузы.
Порядок определения коэффициентов влияния и расчета на их основе корректирующих грузов приведен в приложении Н.
Способ графического определения корректирующих масс и их углового положения указан в приложении G.
После выполнения этой операции вращение ротора на частотах выше первой критической не должно сопровождаться значительным увеличением вибрации (или силы). Если это не выполняется, следует повторить 7.1.5.1-7.1.5.4 на частоте, возможно более близкой к первой критической частоте вращения.
7.1.5.5 Привести ротор во вращение частотой, безопасной для работы машины, близкой ко второй критической; обозначить ее второй балансировочной частотой. Измерить векторы вибрации (силы) на этой частоте в установившемся режиме вращения.
7.1.5.6 Установить на ротор систему пробных грузов, разместив их вдоль ротора так, чтобы на второй балансировочной частоте вызвать значительные изменения векторов вибрации (силы), но их влияние на уровень вибрации на первой критической частоте было бы незначительным.
7.1.5.7 Привести ротор во вращение со второй балансировочной частотой и измерить векторы вибрации (сил).
7.1.5.8 По данным 7.1.5.5 и 7.1.5.7 вычислить коэффициенты динамического влияния системы пробных грузов на второй балансировочной частоте.
Рассчитать систему корректирующих масс, которые не нарушают уравновешенность на низких частотах вращения, но позволяют исключить влияния дисбаланса на второй балансировочной частоте. Установить на роторе эту систему корректирующих масс.
После выполнения этой операции вращение ротора на частотах вращения не должно сопровождаться значительным увеличением вибрации (силы). Если это не выполняется, следует повторить 7.1.5.5-7.1.5.8 на частоте балансировки, возможно более близкой ко второй критической.
7.1.5.9 Продолжать балансировку по вышеописанной методике на частотах балансировки, близких к другим критическим частотам, вплоть до максимальной эксплуатационной частоты. Каждая новая система пробных грузов должна подбираться таким образом, чтобы оказывать значительное влияние на соответствующей балансировочной частоте, но не нарушать достигнутой уравновешенности на более низких частотах. Распределение пробных грузов можно установить опытным путем или расчетом. Для каждого случая вычисляют систему корректирующих масс, исходя из соответствующего коэффициента динамического влияния системы пробных грузов. Система корректирующих масс должна оказывать минимальное влияние на частотах, где балансировка уже проведена, но обеспечивать устранение дисбаланса на частоте балансировки.
7.1.5.10 Если, тем не менее, на этой стадии балансировки будет сохраняться значительная вибрация (или большие значения сил) в диапазоне рабочих частот вращения, следует повторить 7.1.5.9 на частоте балансировки, близкой к максимально допустимой. В данном случае балансировка на частотах, близких к критическим частотам, остальных (более высоких) мод для выявления их воздействия на ротор может оказаться невозможной.
Примечания
1 Некоторые типы роторов до окончания балансировки можно безопасно пускать на всех или же только на некоторых критических частотах вращения. В таком случае число требуемых пусков может быть уменьшено.
2 Следует отметить, что вышеописанная методика предполагает наличие линейной связи между векторами дисбаланса и вибрации (силы). В отдельных случаях это условие может не выполняться, например, когда начальный дисбаланс очень велик, а ротор опирается на подшипники скольжения. В связи с этим могут потребоваться повторные определения коэффициентов влияния, когда вибрация или силы уменьшатся после предварительной балансировки.
3 На практике описанную методику или ее варианты можно усовершенствовать применением компьютерных программ, автоматизированной балансировки.
7.2 Метод балансировки роторов класса 4
Роторы данного класса могут быть отнесены к классам 1, 2 или 3, но имеют один или более гибких элементов или элементов с гибкой связью. Неуравновешенность ротора может изменяться в зависимости от изменения частоты вращения.
Роторы этого класса классифицируются по двум категориям:
- роторы, дисбаланс которых изменяется непрерывно с изменением частоты вращения, например, вентиляторы с резиновыми лопастями;
- роторы, дисбаланс которых изменяется до некоторой частоты вращения, а затем при ее превышении остается постоянным, например, роторы однородных асинхронных электродвигателей с центробежным пусковым выключателем.
Роторы первой категории балансируют на той частоте вращения, для которой нормируют уровень вибрации.
Роторы второй категории балансируют на любой частоте выше той, при которой прекращаются изменения дисбаланса.
Примечание - Влияние гибких элементов можно свести до минимума при проектировании ротора и правильно рассчитав их размещение на роторе, но необходимо иметь ввиду, что для роторов данного класса возможно достижение уравновешенности только на одной частоте или в ограниченном диапазоне частот.
7.3 Методы балансировки роторов класса 5
Для некоторых видов гибких роторов, которые при достижении эксплуатационной частоты вращения проходят одну или несколько критических частот, можно ограничиться балансировкой только на одной частоте, как правило, рабочей. Обычно роторы этого класса удовлетворяют, по крайней мере, одному из следующих требований:
- разгон ротора до максимальной скорости (также и торможение) происходит настолько быстро, что вибрация на критических частотах не успевает превысить допустимый уровень;
- демпфирование системы достаточно для того, чтобы вибрация на критических частотах находилась в допустимых пределах;
- подшипниковые опоры не дают возможности возникнуть нежелательной вибрации;
- допустим высокий уровень вибрации на критических частотах;
- ротор работает на рабочей частоте длительное время, так что условия пуска/останова, неприемлемые при частых пусках, можно считать допустимыми для этого случая.
Если опоры ограничивают вибрацию, особенно важно, чтобы жесткость опор балансировочного станка соответствовала жесткости опор машины. Это обеспечивает воспроизведение на балансировочном станке тех же мод ротора, которые он имеет в машине.
Исходя из предположения, что однотипные роторы имеют схожее распределение дисбалансов, можно выбрать оптимальное положение плоскостей коррекции. При этом может оказаться достаточно иметь две плоскости. Как следствие, уже при балансировке по низшим модам, можно добиться минимального остаточного дисбаланса, что позволит свести до минимума вибрацию на критических частотах
8 ОЦЕНКА КАЧЕСТВА БАЛАНСИРОВКИ
В зависимости от класса и назначения ротора окончательное качество балансировки может оцениваться либо по значениям вибрации в установленных точках измерения, либо по остаточному дисбалансу в определенных плоскостях коррекции.
Примечание - При мелкосерийном производстве можно применять упрощенные методы оценки по сравнению с описанными ниже.
8.1 Роторы, оценку качества балансировки которых проводят по измерениям вибрации с помощью высокоскоростного балансировочного оборудования
8.1.1 Требования к испытательному оборудованию
В случае, когда собственные моды ротора в значительной степени определяются динамическими характеристиками опор, необходимо, чтобы опоры оборудования и машины имели аналогичные характеристики. Например, первая критическая частота ротора в опорах балансировочного устройства не должна значительно превышать эту частоту для ротора, установленного в машине. Это позволяет исследовать все моды на балансировочном оборудовании.
Если консоль ротора в машине имеет опору, то и при испытаниях для нее должна быть предусмотрена аналогичная опора.
Если консоль ротора в машине не имеет опоры, то и при испытаниях опору не применяют.
На корпус подшипника в одной плоскости устанавливают два датчика перпендикулярно друг к другу. Это позволяет регистрировать вертикальную и горизонтальную компоненты вибрации.
Кроме того, для измерений вибрации ротора можно применять в качестве альтернативных или дополнительных датчики относительной и абсолютной вибрации вала. Их также устанавливают в одной плоскости под углом 90° друг к другу. Измерения вибрации ротора дополнительно к измерениям вибрации на корпусах подшипников наиболее целесообразны для роторов класса 3, особенно для точного определения мод ротора.
Во всех случаях резонансы крепежных устройств датчиков во всем диапазоне частот испытаний должны быть исключены.
Сигналы датчиков должны поступать на устройство, способное выделять из полигармонической вибрации гармонику частотой вращения, также и когда частота вращения изменяется в режиме выбега ротора. Привод ротора не должен влиять на его вибрацию и начальный дисбаланс.
Примечание - Чтобы удостовериться в том, что привод не влияет на начальный дисбаланс, следует провернуть соединительную муфту на 180° относительно ротора и измерить векторы вибрации на низкой частоте вращения, когда не проявляется динамический изгиб ротора. Для устранения погрешности произвести векторное вычитание на частоте вращения.
8.1.2 Методика оценки
Ротор привести во вращение, разгоняя его с ускорением, при котором не происходит сглаживание пиков вибрации. Все ярко выраженные пики вибрации следует измерять в диапазоне частот вращения от 70% первой критической частоты до максимальной частоты вращения при эксплуатации.
Продолжительность вращения ротора на максимальной рабочей частоте должна быть достаточной, чтобы устранить эффекты переходного режима. В установившемся режиме следует измерить вибрацию на частоте вращения ротора.
Если это оговаривается в технических условиях, необходимо разогнать ротор до установленной повышенной частоты вращения.
После вращения ротора в течение оговоренного времени на повышенной частоте она должна быть снижена до максимальной рабочей, а измерения вибрации на частоте вращения проведены вновь. Если имеют место или предполагаются значительные изменения дисбаланса после испытаний на повышенной частоте, то окончательную балансировку и оценку вибрации следует проводить после таких испытаний.
Для этого ротор притормаживают и проводят измерения вибрации на частоте вращения в диапазоне от максимальной рабочей частоты до 70% первой критической частоты с интервалом, не превышающим 5% максимальной рабочей частоты. При этом ускорение при торможении также должно быть достаточно медленным, чтобы избежать сглаживания пиков вибрации.
Примечание - Значение повышенной частоты вращения зависит от требований к конкретному ротору. Если таких требований не существует, испытания на повышенной частоте проводят по договоренности между изготовителем и потребителем.
8.2 Роторы, качество балансировки которых определяют посредством измерений вибрации на испытательном стенде
Для роторов, окончательное качество балансировки которых оценивается на испытательном стенде, необходимо использовать аппаратуру и методы испытаний, описанные в 8.1. Однако в некоторых случаях возникает необходимость применения других методов, например:
- ротор с приводом представляет собой единый агрегат;
- ротор, для которого возможно получение данных только на одной частоте вращения, например, ротор асинхронного электродвигателя;
- установка датчиков на подшипники невозможна - в этом случае изготовитель и потребитель оговаривают точки измерения вибрации;
- значение дисбаланса ротора может зависеть от нагрузки - в этом случае изготовитель и потребитель оговаривают диапазон нагрузок, при которых оценивают уравновешенность ротора.
8.3 Роторы, оценку остаточного дисбаланса которых проводят путем измерений вибрации на месте эксплуатации
8.3.1 Машины, качество балансировки роторов которых оценивают после окончательной установки на рабочем месте, подвержены влиянию многих факторов, вызывающих вибрацию. Некоторые факторы действуют на частоте вращения и, следовательно, их влияние можно ошибочно принять за вибрацию, вызванную дисбалансом. Это особенно характерно для машин с двумя или более гибкими роторами, соединенными между собой.
Некоторые из факторов, определяющие появление такой вибрации, а также меры предосторожности от ошибочных заключений указаны в приложении А.
8.3.2 Если какие-либо статорные элементы машины или ее фундамент имеют резонанс на рабочей частоте, возможны высокие уровни вибрации, несмотря на то, что дисбаланс ротора находится в допустимых пределах. В подобных случаях может потребоваться очень точная балансировка, но снижение вибрации достижимо только, если машина малочувствительна к дисбалансу. Если при эксплуатации дисбаланс ротора может увеличиться, следует рассмотреть возможность устранения резонансов конструкции или повышения демпфирования системы, а также принятия других мер, обеспечивающих удовлетворительную работу ротора.
8.3.3 Во многих установках, например, тех, где для привода используют асинхронный электродвигатель, невозможно управлять ускорением разгона ротора, а установившееся состояние можно наблюдать только по достижении рабочей частоты вращения. В этом случае изготовитель и потребитель согласовывают диапазон частот вращения ротора, в пределах которого проводят контроль качества балансировки ротора.
Как правило, контроль качества балансировки ротора проводят на холостом ходу. Для контроля под нагрузкой изготовитель и потребитель оговаривают ее значения.
Примечание - Для некоторых видов оборудования можно использовать положения соответствующих стандартов, в частности, для роторов турбоагрегатов - ГОСТ 27870.
8.4. Роторы, оценку качества балансировки которых определяют на низкочастотной балансировочной установке по значению остаточного дисбаланса в заданных плоскостях коррекции
Как правило, оценку качества балансировки роторов класса 2 проводят на низкочастотных балансировочных установках, но в большинстве случаев предусматривают последующие испытания на высоких частотах на месте или на испытательном стенде. В особых случаях по договоренности между изготовителем и потребителем можно исключить оценку вибрации на высоких частотах. Это особенно характерно для роторов класса 2, когда их приобретают в качестве запасных частей и оценка на месте может быть отложена на значительное время.
Для приведения оценки ротор должен быть собран, т.е. все его элементы (соединительные муфты, зубчатые колеса и т.д.) должны быть смонтированы.
До того, как приступить к оценке дисбаланса ротора, его следует во избежание последующего появления каких-либо деформаций вращать некоторое время на соответствующей частоте.
После наполнения данного условия ротор приводят во вращение на частоте балансировки и измеряют значения и углы дисбалансов в каждой из плоскостей измерения.
Для роторов подклассов 2f и 2g следует определить также начальный дисбаланс.
У роторов, которые подвергают поэлементной балансировке или собраны из сбалансированных элементов, следует, кроме того, определять дисбаланс после каждой стадии сборки.
8.5 Роторы, качество балансировки которых определяют на высоких частотах вращения путем оценки остаточного дисбаланса в заданных плоскостях коррекции
Положение плоскостей коррекции и балансировочные частоты необходимо указывать для балансировки по каждой из мод ротора. Если оценку проводят на балансировочном устройстве, снабженном собственной контрольно-измерительной аппаратурой, ее следует использовать в течение всей процедуры.
Если ротор испытывают на повышенных частотах вращения, измерительная аппаратура и установка ротора на испытательном оборудовании должны соответствовать 8.1.
Если выполнены все эти условия, ротор вращают последовательно на каждой балансировочной частоте и регистрируют значения и углы дисбалансов, приведенные к каждой из плоскостей коррекции.
По просьбе заказчика обследование роторов можно осуществить по 7.1.5. Такое обследование следует проводить на каждой из балансировочных частот.
9 ВЫБОР КРИТЕРИЯ
Оценку качества балансировки гибкого ротора обычно выполняют по вибрации опор подшипников балансировочного оборудования или испытательного стенда на частоте вращения. Этот метод описан в разделе 10.
Другим методом оценки является исследование остаточного дисбаланса, приведенного к заданным плоскостям коррекции, как указано в разделе 11. Для роторов класса 2 оценку проводят на низких частотах вращения.
Если испытательное оборудование не позволяет достаточно точно воспроизвести реальные условия эксплуатации и (или) влияние соединения испытуемого ротора с другим, вопрос о допустимости применения его подлежит решению, исходя из опыта.
Вопрос выбора между методами, описанными в разделах 10 и 11, определяется изготовителем ротора.
10 РЕКОМЕНДАЦИИ ПО ОПРЕДЕЛЕНИЮ ДОПУСТИМОЙ ВИБРАЦИИ НА БАЛАНСИРОВОЧНОМ ОБОРУДОВАНИИ
Если необходимо оценить качество балансировки по вибрации на балансировочном оборудовании, то последнее должно подбираться из условия обеспечения непревышения предельных уровней вибрации машины после установки в нее отбалансированного ротора.
Существует сложная зависимость между вибрацией подшипниковых опор балансировочного оборудования и вибрацией машины. Эту зависимость определяют многими, в том числе вышеуказанными факторами. В большинстве случаев она устанавливается для конкретных типов машин в результате исследования балансировки типовых роторов на одном и том же балансировочном оборудовании. Результаты таких исследований обычно служат основой для определения допустимой вибрации на балансировочном оборудовании.
Однако необходимые данные могут отсутствовать (например, если используют балансировочное оборудование нового типа, или речь идет о роторах совершенно новой конструкции). Эти случаи описаны в настоящем разделе, где представлен способ расчета допустимой вибрации на частоте вращения, исходя из норм вибрации машины на месте установки. Если в технических условиях отсутствуют требования к допустимой вибрации на месте установки, то следует руководствоваться соответствующими стандартами, например, ГОСТ 25364.
10.1 Общие положения
Численные значения, определяемые в соответствии с настоящим разделом, можно использовать лишь в качестве рекомендуемых, но не норм при приемке изделия. При таком использовании можно ожидать удовлетворительных результатов в процессе эксплуатации, хотя могут возникнуть ситуации, требующие отклонения от этих рекомендаций.
В особых случаях эти рекомендации могут служить основой для более детальных исследований, например, когда требуется более точное определение требуемого качества балансировки.
10.2 Особые случаи
Иногда машины проектируют для специальных целей, что неизбежно сказывается на их виброхарактеристиках, например, авиационные реактивные двигатели и их модификации для промышленных целей. Одним из основных требований к таким двигателям является ограничение максимальной массы, вследствие чего основные элементы и подшипниковые опоры обладают значительно большей податливостью, чем в обычных машинах. При проектировании подобных машин делают все возможное для уменьшения нежелательных последствий повышенной податливости подшипниковых опор, в частности, проводят множество испытаний в процессе разработки с целью обеспечения приемлемых и безопасных уровней вибрации. На случай, когда допустимые уровни вибрации устанавливают в ходе длительных виброиспытаний до начала выпуска изделия, рекомендации настоящего раздела не распространяются.
10.3 Факторы, влияющие на вибрацию машин
На вибрацию оказывает влияние множество факторов, в том числе качество монтажа машины, наличие перекоса ротора и т.д.
Указываемые в технических условиях на машину максимальные допустимые уровни вибрации обычно относятся к суммарной (общей) вибрации, имеющей сложный частотный спектр и возникающей в результате действия всех факторов. Изготовитель должен определить допустимый уровень вибрации, вызываемой только дисбалансом ротора, при котором общая вибрация не превосходит установленных пределов.
10.4 Критические точки
Особое внимание следует обращать на уровни вибрации ротора в местах наименьшего зазора, например, лабиринтных уплотнениях в связи с высокой вероятностью повреждений. Следует помнить, что условия эксплуатации могут вызвать изменение собственных мод и, следовательно, уровней вибрации. Валопроводы с жесткой связью (например, в паротурбинных агрегатах) требуют особого внимания к факторам, определяющим условия работы валопроводов (приложение А).
10.5 Допустимые уровни вибрации балансировочного оборудования
Допустимую вибрацию на балансировочном оборудовании можно регламентировать в виде:
- вибрации подшипниковых опор, которую определяют по допустимой вибрации подшипниковых опор машины
или
- вибрации ротора, которую определяют по допустимой вибрации ротора машины.
В обоих случаях соответствующую допустимую вибрацию на частоте вращения на балансировочном оборудовании следует определять с использованием коэффициентов преобразования по формуле
![]() , (1)
, (1)
где - допустимая общая вибрация в горизонтальном или вертикальном направлениях, измеряемая на машине в диапазоне рабочих частот вращения в соответствии с техническими условиями на машину или стандартом (например, ГОСТ 25364);
- отношение значения допустимой вибрации на частоте вращения к допустимому значению общей вибрации (
![]() );
);
- коэффициент, учитывающий отличие характеристик подшипниковых опор и (или) устройств сопряжения (муфты) балансировочного оборудования и машины. Определяется как отношение вибрации на частоте вращения, измеряемой на балансировочном оборудовании (ротор или подшипниковая опора), к вибрации на частоте вращения машины на месте эксплуатации (если нельзя принять
=1). Значение
часто зависит от направления измерений;
- коэффициент, учитывающий различие точек измерения вибрации на балансировочном оборудовании и точек, для которых определено значение
, и зависящий от характеристик мод ротора. Если вышеуказанные точки совпадают,
=1, в противном случае для получения значения
можно воспользоваться расчетной моделью динамики роторной системы.
Значения коэффициентов преобразования и
могут изменяться в широких пределах и зависеть от частоты вращения. Примерные значения коэффициентов
и
представлены в приложении С. Значения
следует устанавливать для каждого конкретного случая. При совпадении критической частоты вращения с рабочей частотой необходимо использовать более высокие значения коэффициентов преобразования. На практике нет необходимости определять эти коэффициенты по отдельности, так как изготовитель и потребитель по договоренности между собой устанавливают их произведение.
Примеры использования коэффициентов преобразования приведены в приложении F.
Следует иметь ввиду, что на критических частотах возможно усиление отдельных мод вибрации. Поэтому целью балансировки является не только ограничение вибрации в диапазоне рабочих скоростей вращения, но и обеспечение безопасного перехода через критические частоты, если они меньше максимальной рабочей. Для критических частот трудно установить количественные критерии, так как необходимо учитывать многие факторы, например, демпфирование.
В условиях, когда необходимо контролировать прогиб ротора при его разгоне в связи с опасностью задеваний о статорные части или возникновения недопустимых напряжений, на критических частотах, меньших эксплуатационной, следует измерять размах виброперемещения в той части ротора, где оно максимально.
11 РЕКОМЕНДАЦИИ ПО ОПРЕДЕЛЕНИЮ ДОПУСТИМОГО ОСТАТОЧНОГО ДИСБАЛАНСА В ПЛОСКОСТЯХ КОРРЕКЦИИ
11.1 Общие положения
Не существует простой зависимости между дисбалансом ротора и вибрацией машины при эксплуатации. На вибрацию влияют масса машины и ее фундамента, жесткость подшипников и фундамента, близость рабочей частоты к резонансной частоте, демпфирование.
Представленные ниже рекомендации - пример разработки руководства по обеспечению качества балансировки гибких роторов. Они получены опытным путем при ограниченном числе экспериментов с роторами различных классов. При соблюдении рекомендации можно ожидать удовлетворительной работы ротора в эксплуатации, хотя в отдельных случаях могут оказаться необходимыми отклонения от них.
Значения, получаемые в соответствии с настоящим разделом, могут использоваться лишь в качестве рекомендуемых, но не норм при приемке изделия.
11.2 Допустимый остаточный дисбаланс роторов класса 2
Значение остаточного дисбаланса роторов класса 2 должно соответствовать ГОСТ 22061.
У роторов подклассов 2f, 2q и 2h каждый из элементов или, если возможно, сборку элементов следует балансировать до пределов, полученных опытным путем или указанных в ГОСТ 22061.
11.3 Допустимый остаточный дисбаланс роторов класса 3
11.3.1 Роторы подкласса 3а
Для гибких роторов, дисбаланс которых независимо от его распределения существенно влияет только на основную собственную моду, эквивалентное значение для основной собственной моды не должно превышать 60% дисбаланса по ГОСТ 22061 для максимальной частоты вращения.
Если проводят низкочастотную балансировку, то полный остаточный дисбаланс не должен превышать значений, приведенных в ГОСТ 22061 для максимальной рабочей частоты вращения.
11.3.2 Роторы подкласса 3b
Для гибких роторов, дисбаланс которых независимо от его распределения существенно влияет только на основную и вторую собственные моды, эквивалентное значение дисбаланса для основной собственной моды не должно превышать 60% этих значений на максимальной рабочей частоте вращения.
Если проводят низкочастотную балансировку, значение остаточного дисбаланса не должно превышать значений, приведенных в ГОСТ 22061.
11.3.3 Роторы подкласса 3с
Для этих роторов рекомендуемых значений остаточного дисбаланса не установлено.
Примечания
1 Метод экспериментального определения эквивалентного дисбаланса представлен в приложении D.
2 Рекомендации не распространяются на роторы с консольной частью, если она имеет значительный динамический прогиб.
3 Указанные выше рекомендуемые значения могут быть пересмотрены, если рабочие частоты близки к основной или второй критическим частотам вращения.
4 Рекомендуемые значения остаточного дисбаланса не гарантируют соблюдения норм вибрации в балансировочном устройстве при частотах вращения от 80 до 120% любой критической частоты вращения. Усиление вибрации требует более точной балансировки, так как, например, демпфирование в балансировочном оборудовании зачастую меньше, чем в машине на месте установки.
5 Если не представляется возможным выполнить балансировку по всем модам изгиба ротора (например, вследствие недостаточного количества плоскостей коррекции), то следует провести балансировку по особенно важным модам.
ПРИЛОЖЕНИЕ А
(справочное)
ФАКТОРЫ, УЧИТЫВАЕМЫЕ ПРИ БАЛАНСИРОВКЕ НА МЕСТЕ МНОГООПОРНЫХ ГИБКИХ ВАЛОПРОВОДОВ
А.1 Дисбаланс не является единственной причиной вибрации ротора, в том числе вибрации на частоте вращения. Приступать к балансировке следует предварительно исследовав влияние описываемых ниже факторов, определяющих уровни вибрации машины.
Это особенно важно для водопроводов, состоящих из двух и более роторов. Примером является крупный паротурбинный агрегат.
А.2 Несоосность и перекос подшипников
Несоосность и перекос подшипников могут вызвать вибрацию, которую невозможно устранить балансировкой. При сильной вибрации следует улучшить центровку подшипников.
А.3 Эксцентриситет и несоосность соединений
Практически невозможно соединить крупные роторы без эксцентриситета или несоосности элементов соединений.
Если качество соединений вызывает сомнения или валопровод не поддается балансировке, следует проверить и привести в норму концентричность и соосность муфт и лишь затем приступить к балансировке.
А.4 Неустойчивость ротора на масляном клине
Различные формы неустойчивости роторов могут иметь место в подшипниках с гидродинамической смазкой. Признаки неустойчивости хорошо известны, поэтому перед балансировкой необходимо удостовериться в их отсутствии.
ПРИЛОЖЕНИЕ В
(справочное)
НИЗКОЧАСТОТНАЯ БАЛАНСИРОВКА РОТОРОВ ПОДКЛАССА 2d
В ТРЕХ ПЛОСКОСТЯХ
В.1 В данном приложении рассматривается низкочастотная балансировка роторов, начальный дисбаланс которых распределен по длине равномерно или по линейному закону и которые имеют одну плоскость коррекции в центре и две на краях.
Они достаточно хорошо балансируются, если известна доля дисбаланса, которая должна быть устранена в центральной плоскости. Данное приложение описывает метод расчета корректирующих масс в трех плоскостях, исходя из начальных дисбалансов, определенных в двух плоскостях измерения дисбаланса. Векторная сумма сил и моментов, создаваемых корректирующими массами ,
,
в трех плоскостях коррекции относительно некоторой точки на роторе, должна быть равной сумме сил и моментов начальных дисбалансов
и
относительно этой же точки.
Методика балансировки пригодна при выполнении следующих условий:
- межопорный ротор;
- масса ротора распределена равномерно, консольные части отсутствуют;
- изгибная жесткость ротора по длине одинакова;
- положение плоскостей коррекции на концах ротора относительно его середины симметрично;
- рабочие частоты вращения значительно ниже второй критической частоты.
В.2 Ротор может быть полностью отбалансирован вплоть до первой критической частоты, если выполняются следующие векторные уравнения:
![]() ,
,
![]() , (В.1)
, (В.1)
,
где определяет долю дисбаланса в центральной плоскости коррекции.
Зависимость от
представлена на рисунке В.1, где
- расстояние от левого подшипника до ближайшей плоскости коррекции,
- расстояние между подшипниками (длина ротора).
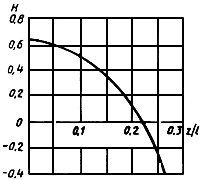
Рисунок В.1 - График для определения доли дисбаланса, подлежащего устранению
в центральной плоскости коррекции
Постоянная равна нулю при
![]() . Это означает, что в данном случае необходимость использования центральной плоскости коррекции отпадает.
. Это означает, что в данном случае необходимость использования центральной плоскости коррекции отпадает.
ПРИЛОЖЕНИЕ С
(справочное)
КОЭФФИЦИЕНТЫ ПРЕОБРАЗОВАНИЯ
Коэффициенты преобразования для расчета допустимой вибрации на частоте вращения в балансировочном устройстве приведены в таблице С.1 в соответствии со следующей классификацией:
1 Составные части машин.
2 Машины средних размеров, не имеющие специальных фундаментов, а также двигатели и машины (до 300 кВт), жестко закрепляемые на специальных фундаментах.
3 Крупногабаритные приводные двигатели и крупногабаритные машины на жестких и тяжелых фундаментах, имеющих малую податливость в направлении измерения вибрации.
4 Крупногабаритные приводные двигатели и крупногабаритные машины на фундаментах, имеющих значительную податливость в направлении измерения вибрации.
Таблица C.1
Номер клас- | Типовая машина | Вибрация подшип- | Абсо- | Относи- | |
1 | Компрессор наддува. Малые электродвигатели до 15 кВт | 1,0 | |||
2 | Бумагоделательные машины. | ||||
Электрические машины среднего размера 15-75 кВт. | 0,7-1,0 | ||||
Электрические машины на специальных фундаментах (до 300 кВт) | |||||
Компрессоры | От 0,6 | От 1,6 | От 1,0 | ||
Малые турбины | 1,0 | ||||
3 | Крупные электродвигатели | 0,7-1,0 | |||
Насосы | 0,7-1,0 | ||||
Двухполюсные генераторы | 0,8-1,0 | ||||
Турбины и многополюсные генераторы | 0,9-1,0 | ||||
4 | Газовые турбины | 1,0 | |||
Двухполюсные генераторы | 0,8-1,0 | ||||
Турбины и многополюсные генераторы | 0,9-1,0 | ||||
ПРИЛОЖЕНИЕ D
(справочное)
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ЭКВИВАЛЕНТНЫХ
МОДАЛЬНЫХ ДИСБАЛАНСОВ
Для определения эквивалентного дисбаланса, вызывающего собственную моду вибрации ротора, и для оценки эквивалентного остаточного дисбаланса может применяться следующая процедура.
D.1 Установить ротор на балансировочное оборудование.
D.2 Разогнать ротор до скорости, близкой к первой критической частоте вращения, и измерить вибрацию или силы, действующие на подшипниковые опоры.
D.3 Установить на роторе пробный груз. Груз должен оказывать существенное влияние на вибрацию, поэтому его следует установить в плоскости максимального влияния на первую собственную моду вибрации ротора. Эта плоскость, как правило, находится вблизи середины ротора. Повторить измерения по D.2.
D.4 По результатам измерений определить эквивалентный дисбаланс первой моды. Это можно выполнить графически в соответствии с приложением G. Значения эквивалентного модального дисбаланса для первой моды равно:
(масса пробного груза) х (![]() )
)
D.5 Снять пробный груз.
D.6 Разогнать ротор до скорости, близкой ко второй критической частоте вращения, при условии, что она меньше максимальной рабочей частоты вращения. Повторить измерения по D.2.
D.7 Установить на ротор пробный груз. Груз должен оказывать существенное влияние на вибрацию, поэтому его следует установить в плоскости максимального влияния на вторую собственную моду вибрации ротора. Повторить измерения пo D.2.
D.8 По результатам измерений в соответствии с D.6 и D.7 определить эквивалентный дисбаланс, вызывающий вторую моду вибрации ротора, для чего можно использовать приложение G.
D.9 Снять пробный груз.
D.10 Продолжить последовательно описанные операции, пока не будут найдены эквивалентные дисбалансы для всех достижимых собственных мод вибрации ротора.
Примечания
1 Настоящая процедура предполагает, что вибрация, измеренная на скорости вблизи некоторой критической, определяется в основном соответствующей модой. Данный метод не может быть использован, если, в силу каких-либо причин, невозможно обеспечить измерения на скоростях, близких к критическим скоростям некоторых важных мод, и, таким образом, идентифицировать соответствующие модальные характеристики.
2 В некоторых случаях при определении эквивалентного модального дисбаланса предпочтительно использовать набор пробных масс, для того чтобы обеспечить безопасное прохождение низших критических скоростей.
ПРИЛОЖЕНИЕ Е
(справочное)
МЕТОДИКА ОПРЕДЕЛЕНИЯ ВИДА РОТОРА
(ЖЕСТКИЙ ИЛИ ГИБКИЙ)
Если установлено, что ротор жесткий, его балансировку можно выполнять при низких частотах вращения. Гибкие роторы в общем случае должны подвергаться высокочастотной балансировке согласно разделу 7. Исключение составляют роторы класса 2, которые балансируют в соответствии с разделом 6.
По внешнему виду ротора невозможно определить, является он жестким или гибким. Жесткий на первый взгляд ротор при работе на высоких частотах вращения может проходить при разгоне через критические частоты, получая значительные динамические прогибы. С другой стороны, кажущийся гибкий ротор может оказаться жестким, если его максимальная рабочая частота вращения намного ниже первой критической.
Е.1 Определение вида ротора
Для определения вида ротора (гибкий или жесткий) и, следовательно, метода балансировки, можно воспользоваться следующими рекомендациями.
Е.1.1 Получить у изготовителя или заказчика сведения о типе ротора и рекомендуемом методе балансировки.
Е.1.2 Если первая критическая скорость вращения превышает максимальную рабочую частоту, по крайней мере, на 30%, ротор можно считать жестким.
Е.1.3 Кроме того, можно воспользоваться следующим методом испытаний.
Сбалансировать ротор на низких частотах вращения в двух плоскостях коррекции в соответствии с ГОСТ 22061.
Привести ротор во вращение с рабочей частотой на балансировочном оборудовании, жесткость и демпфирование подшипниковых опор которого аналогичны соответствующим характеристикам машины.
При разгоне ротора следить, чтобы вибрация находилась в допустимых пределах.
Получить зависимость вектора вибрации от частоты вращения при разгоне и торможении (выбеге).
Если не обнаруживается значительных изменений вибрации, это означает, что ротор либо жесткий, либо гибкий с незначительным эквивалентным дисбалансом. Для идентификации ротора следует испытать его на гибкость по Е.2.
Если при разгоне или выбеге ротора происходят значительные изменения вибрации, то имеет место одна из следующих альтернатив:
- ротор гибкий;
- ротор жесткий, но установлен на податливые опоры;
- ротор имеет податливые элементы, деформация которых является функцией частоты вращения и температуры.
Для идентификации ротора необходимо вновь разогнать ротор и сравнить новые и старые значения вибрации при выбеге. Если они совпадают, массово-геометрические характеристики можно считать стабилизировавшимися. Затем следует провести испытания на гибкость в соответствии с Е.2.
Примечание - Стабилизация ротора происходит в силу "прирабатывания" его элементов под действием центробежных сил. Так, например, для роторов генератора и электродвигателей часто требуются выполнять разгоны и выбеги до тех пор, пока обмотка и система подвески не примут свое окончательное положение.
Если сравниваемые характеристики вибрации при выбеге ротора не совпадают, то дисбаланс является переменной величиной. Ротор в данных условиях отбалансировать невозможно.
Е.2 Испытания на гибкость
Установить пробный груз посередине ротора или в точке, где установка груза может вызвать его интенсивную вибрацию. Разогнать ротор до рабочей частоты, следя за тем, чтобы вибрация находилась в допустимых пределах. Если при разгоне вибрация превышает допустимую, массу груза следует уменьшить и пуск повторить. Измерить вектор вибрации на рабочей частоте в той же точке, что при измерениях по Е.1.3. Определить влияние груза путем вычитания вектора вибрации из соответствующего вектора, определенного по Е.1.3. Вектор разности обозначить А.
Остановить ротор и снять груз. Установить два других груза под тем же углом, что и первый груз, вблизи цапф ротора. Общая масса грузов должна быть равна массе первого пробного груза и распределена между грузами так, чтобы установка грузов не создавала момента дисбаланса. Определить влияние двух грузов, как описано выше, обозначив вектор разности В.
Е.3 Оценка результатов испытаний на гибкость
Найти отношение ![]() .
.
Если оно менее 0,2, ротор можно считать жестким. Ротор считают квазижестким или гибким, если отношение равно или более 0,2.
ПРИЛОЖЕНИЕ F
(справочное)
ПРИМЕРЫ
Пример 1 (соответствует разделу 10) | |
Ротор | Ротор паровой турбины (класс 4) |
Рабочая частота вращения | 3000 об/мин |
Допустимая вибрация ( | 2,5 мм/с (вибрация на корпусе подшипника согласно техническим условиям или стандарту) |
Установка | Балансировочное оборудование с жесткостью опор, меньшей жесткости опор машины, на месте эксплуатации |
Место измерения вибрации | Корпус подшипника |
Коэффициенты преобразования, определенные опытным путем |
|
| |
| |
Допустимая вибрация на частоте вращения ( |
|
При рабочей частоте вращения вибрация на частоте вращения эквивалентна вибрации с размахом виброперемещения |
|
Пример 2 (соответствует разделу 10) | |
Ротор | Ротор генератора 660 МВт |
Рабочая частота вращения | 3000 об/мин |
Допустимый размах относительной вибрации ротора на месте эксплуатации ( | 80 мкм вблизи цапф подшипников |
Установка | Балансировочное оборудование с жесткостью опор, меньшей жесткости опор машины, на месте эксплуатации |
Коэффициенты преобразования, определенные изготовителем опытным путем |
|
| |
| |
| |
Допустимый размах относительной вибрации ротора на балансировочном оборудовании | а) вблизи цапф |
| |
б) на муфте | |
| |
Пример 3 (соответствует 11.3.2) | |
Ротор | Ротор турбокомпрессора |
Класс ротора | 3b |
Рабочая частота вращения | 15000 об/мин |
Масса ротора | 1000 кг |
Выполняется низкочастотная балансировка в двух плоскостях коррекции, расположенных вблизи цапф ротора | |
Остаточный дисбаланс эквивалентного жесткого ротора в соответствии с ГОСТ 22061 | 1,60 (г·мм/кг)х1000 (кг)=1600 г·мм |
Допустимый эквивалентный дисбаланс для первой моды (100%) | 1600 г·мм |
Допустимый эквивалентный дисбаланс для второй моды (60%) | 960 г·мм |
Остаточный дисбаланс при балансировке жесткого ротора | 1600 г·мм (800 г·мм в каждой плоскости) |
ПРИЛОЖЕНИЕ G
(справочное)
МЕТОД ГРАФИЧЕСКОГО ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА
Вектор на рисунке G.1 представляет исходную вибрацию на рабочей частоте вращения ротора.
Вектор представляет вибрацию после установки пробных грузов, измеренную при тех же условиях.
Таким образом, для снижения до нуля исходной вибрации на рабочей частоте необходимо переместить (повернуть) пробные грузы на угол и изменить массы каждого из них в отношении
![]() .
.
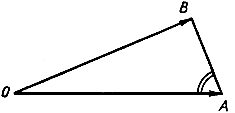
Рисунок G.1 - Векторное представление влияния пробных грузов
ПРИЛОЖЕНИЕ Н
(справочное)
МЕТОД БАЛАНСИРОВКИ ПО КОЭФФИЦИЕНТАМ ВЛИЯНИЯ
Н.1 Метод основан на допущении, что вибрация {} контролируемых точек балансировочного оборудования (это могут быть подшипниковые опоры, а также и колебания самого ротора), является линейной суперпозицией дисбалансов {
}, сосредоточенных в выбранных плоскостях коррекции, т.е.
![]() , (H.1)
, (H.1)
где - динамический коэффициент влияния дисбаланса, сосредоточенного в
-й плоскости коррекции на вибрацию
-й точки ее измерения. Динамический коэффициент влияния получают в результате измерения амплитуд и фаз вибрации контрольных точек при последовательной установке пробных масс
или их систем (симметричной, кососимметричной) в каждую из
плоскостей коррекции или их сочетаний и определения их величин по формуле
![]() . (H.2)
. (H.2)
Н.2 При балансировке измерения параметров вибрации выполняются в точках на
частотах вращения, т.е. общее число измерений равно
, а система векторных уравнений в матричной форме приобретает в соответствии с изложенным вид
![]() . (H.3)
. (H.3)
Если общее число измерений превышает число плоскостей коррекции
, то оптимальные значения корректирующих масс получают по методу наименьших квадратов.
Н.3 При балансировке ротора по методу коэффициентов влияния следует учитывать требования к ограничению вибрации (сил) на частотах вращения ниже максимальной рабочей, поэтому в систему уравнений в обязательном порядке должны включаться линейно независимые строчки, составленные на основании измерений на нескольких промежуточных частотах вращения. Выбор последних зависит от класса ротора, податливости опор балансировочного устройства и других факторов, но независимо от них в него должны входить низкая частота (порядка 25% от первой критической), ближайшие окрестности всех критических частот, ниже рабочей, а также эта последняя.
При выборе плоскостей коррекции в методе коэффициентов влияния следует пользоваться соображениями, изложенными в разделе 7. Например, груз в средней плоскости симметричного гибкого ротора оказывает очень большое влияние на вибрацию опор на первой критической частоте и, часто, небольшое на синфазную вибрацию на рабочей частоте за первой критической. В последнем случае целесообразно использовать пару симметричных грузов в крайних плоскостях коррекции. Кососимметричная пара грузов в этих плоскостях эффективно снимает противофазную вибрацию как на рабочей частоте, так и на второй критической, поэтому часто симметричный ротор может быть удовлетворительно отбалансирован в широком диапазоне частот, включая и рабочую, при помощи только этих двух систем грузов, каждая из которых представляется в уравнениях одним динамическим коэффициентом влияния.
При балансировке несимметричных роторов балансировку следует выполнять с использованием динамических коэффициентов влияния для отдельных грузов, однако подбор плоскостей коррекции должен учитывать преимущественно их эффективность при том или ином соотношении фаз вибрации опор и той или иной критической частоте вращения.
Сказанное в полной мере относится и к методу балансировки по модам.
Текст документа сверен по:
М.: ИПК Издательство стандартов, 1996
{kind=link}