ГОСТ ИСО 1940-2-99
Группа Г02
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
ТРЕБОВАНИЯ К КАЧЕСТВУ БАЛАНСИРОВКИ ЖЕСТКИХ РОТОРОВ
Часть 2
Учет погрешностей оценки остаточного дисбаланса
Mechanical vibration. Balance quality requirements of rigid rotors. Part 2. Balance errors
МКС 17.160
ОКСТУ 0011
Дата введения 2001-01-01
Предисловие
1 РАЗРАБОТАН Межгосударственным техническим комитетом по стандартизации МТК 183 "Вибрация и удар"
ВНЕСЕН Госстандартом России
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол N 16-99 от 8 октября 1999 г.)
За принятие проголосовали:
Наименование государства | Наименование национального органа по стандартизации |
Азербайджанская Республика | Азгосстандарт |
Республика Армения | Армгосстандарт |
Республика Беларусь | Госстандарт Беларуси |
Грузия | Грузстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Киргизская Республика | Киргизстандарт |
Республика Молдова | Молдовастандарт |
Российская Федерация | Госстандарт России |
Республика Таджикистан | Таджикгосстандарт |
Республика Узбекистан | Узгосстандарт |
Украина | Госстандарт Украины |
3 Настоящий стандарт представляет собой аутентичный текст международного стандарта ИСО 1940-2-96 "Вибрация. Требования по качеству балансировки роторов. Часть 2. Погрешности балансировки"
4 Постановлением Государственного комитета Российской Федерации по стандартизации и метрологии от 21 июня 2000 г. N 162-ст межгосударственный стандарт ГОСТ ИСО 1940-2-99 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 января 2001 г.
5 ВВЕДЕН ВПЕРВЫЕ
Введение
Качество балансировки жесткого ротора определяют в процессе проведения процедуры балансировки в соответствии с ГОСТ 22061* по результатам измерений остаточного дисбаланса. Эти измерения могут содержать погрешности самой разнообразной природы, что вызывает необходимость их учета для формирования окончательного заключения о качестве проведенной балансировки. В настоящем стандарте указаны наиболее типичные виды погрешностей, а также факторы, их вызывающие, и даны рекомендации по оценке этих погрешностей. Кроме того, представлен обобщенный метод оценки остаточного дисбаланса в присутствии указанных факторов.
______________
* На территории Российской Федерации действует ГОСТ ИСО 1940-1-2007, здесь и далее по тексту. - .
1 Область применения
Настоящий стандарт устанавливает методы определения погрешностей оценки остаточного дисбаланса (далее - погрешности балансировки) жестких роторов (далее - роторы), а также условия приемки роторов в соответствии с требованиями ГОСТ 22061 при наличии погрешностей балансировки.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 16504-81 Система государственных испытаний продукции. Испытания и контроль качества продукции. Основные термины и определения
ГОСТ 19534-74 Балансировка вращающихся тел. Термины
ГОСТ 22061-76 Машины и технологическое оборудование. Система классов точности балансировки. Основные положения
3 Определения
В настоящем стандарте применяют термины по ГОСТ 16504 и ГОСТ 19534.
4 Виды погрешностей балансировки
Погрешность балансировки представляет собой разность между остаточным дисбалансом ротора и его оценкой, полученной в ходе балансировки,* т.е. является векторной величиной. Погрешности балансировки подразделяют на следующие виды:
а) систематическая погрешность - не изменяется от измерения к измерению, проводимых в одних и тех же условиях; ее модуль и угол могут быть оценены посредством либо расчета, либо измерения;
б) случайная погрешность - ее модуль и угол изменяются непредсказуемым образом для различных пусков при одних и тех же условиях.
________________
* Следует иметь в виду, что в промежутке между балансировкой ротора и началом его эксплуатации дисбаланс ротора может измениться, например в результате транспортировки. Такие изменения не относят к погрешностям балансировки, однако их, по возможности, также следует оценивать и учитывать при приемке ротора в соответствии с выбранным критерием.
Ниже приведен перечень причин возникновения погрешностей*.
________________
* Вклад в погрешность балансировки вносят также погрешности измерительной системы. Они не зависят от балансируемого ротора и должны быть определены и, по возможности, сведены к минимуму до проведения процедуры балансировки; однако нескомпенсированные погрешности измерительной системы также должны быть приняты во внимание при оценке общей погрешности балансировки.
Их разделение по видам вызываемых погрешностей является условным и зависит от используемой технологии балансировки (на балансировочных станках, на месте установки, с использованием дополнительных приспособлений, балансировка ротора в сборе или по частям и т.п.).
Некоторые из погрешностей более подробно обсуждены в приложении А.
4.1 Систематические погрешности
Систематические погрешности могут быть вызваны:
а) дисбалансом приводного вала балансировочного станка;
б) дисбалансом оправки;
в) радиальными и осевыми биениями деталей привода на оси вала ротора;
г) радиальными и осевыми биениями деталей, используемых для крепления составных частей ротора, или оправки (см. 5.2);
д) несоосностью цапф ротора и поверхности опоры, используемой при балансировке;
е) радиальными и осевыми биениями в подшипниках качения, которые не используют при эксплуатации ротора, а применяют только для установки ротора на балансировочном станке;
ж) радиальными и осевыми биениями вращающихся колец (и их дорожек) подшипников качения, используемых при эксплуатации, которые устанавливают после балансировки;
з) дисбалансом, вызываемым шпонкой или шпоночной канавкой;
и) остаточным магнетизмом ротора или оправки;
к) погрешностями, вызываемыми повторной сборкой ротора;
л) погрешностями, вызываемыми балансировочными приспособлениями;
м) разницей в посадочных диаметрах вала ротора и балансировочной оправки;
н) дефектами карданных соединений.
4.2 Случайные погрешности
Случайные погрешности могут быть вызваны:
а) неплотной посадкой деталей;
б) захваченными при вращении ротора жидкими или твердыми частицами;
в) влиянием температурных эффектов;
г) влиянием сопротивления воздуха;
д) использованием для соединения с приводом муфт с зазором;
е) прогибом тяжелых роторов в состоянии покоя вследствие влияния силы тяжести.
Из числа случайных погрешностей выделяют такие, для которых можно заранее оценить максимальное значение модуля, но угол которых остается неизвестным*;
ж) зазоры в соединениях, которые после проведения процедуры балансировки должны быть разобраны;
з) увеличенный зазор в карданных соединениях;
и) повышенный зазор на оправке или валу;
к) конструктивные или производственные допуски;
л) эксцентриситет роликов опоры балансировочного станка, если их диаметры равны или близки диаметру цапфы ротора или их отношение составляет целое число.
________________
* В англоязычной литературе такие погрешности называют "скалярными" (scalar errors), подразумевая, что для данной погрешности определено только одно, скалярное значение, хотя под "скалярной погрешностью" понимают на самом деле векторную величину.
5 Оценки погрешностей
5.1 Общие положения
Погрешности балансировки, вызываемые балансировочным оборудованием и аппаратурой, могут возрастать в зависимости от значения дисбаланса. Поэтому необходимо предпринимать все усилия для изготовления ротора с минимальным исходным дисбалансом. Кроме того, при анализе причин появления дисбаланса на стадии проектирования можно ограничить влияние некоторых из этих причин, например объединяя несколько элементов в один или уменьшая допуски зазоров. Следует сравнить расходы, вызываемые принятием более жестких допусков, с выгодой, получаемой от лучшей уравновешенности ротора. Если упомянутые причины появления дисбаланса устранить или ограничить до приемлемого уровня не удается, желательно оценить влияние этих причин расчетным методом.
5.2 Погрешности балансировки вследствие посадки деталей с осевым и радиальным эксцентриситетом
Если полностью уравновешенные детали ротора устанавливают с эксцентриситетом по отношению к оси вала ротора, остаточный статический дисбаланс будет равен произведению массы
детали на эксцентриситет
:
![]() . (1)
. (1)
Дополнительный моментный дисбаланс появляется, если данную деталь устанавливают с эксцентриситетом в плоскости (перпендикулярной к оси вращения), не проходящей через центр масс ротора. Причем чем больше будет расстояние от центра масс, тем больше будет порождаемый моментный дисбаланс.
Если полностью уравновешенную деталь устанавливают таким образом, что ее главная ось инерции пересекается с осью вала ротора, но ее центр масс лежит на оси ротора, данная деталь будет вносить чисто моментный дисбаланс. Для небольших угловых отклонений результирующий моментный дисбаланс
будет приблизительно равен произведению разности между моментами инерции относительно поперечной оси, проходящей через центр масс детали,
и относительно вышеупомянутой главной оси инерции
на угол
в радианах:
![]() . (2)
. (2)
(Данное положение справедливо только для деталей, чья поверхность представляет собой тело вращения.)
Если имеет место как радиальный, так и осевой эксцентриситет, каждую погрешность следует рассчитывать по отдельности с учетом того места, где она проявляется: на опоре или в плоскости коррекции, - с последующим векторным суммированием.
5.3 Оценка погрешностей в процессе балансировки на балансировочном станке
При балансировке на балансировочном станке погрешности балансировки могут зависеть от типа ротора, способа опирания и привода ротора, конструкции опоры балансировочного станка (подшипники, дополнительные опоры и т.д.), системы преобразования и считывания колебаний. Определив источник наибольших ошибок, можно впоследствии либо уменьшить его воздействие, либо произвести соответствующую коррекцию при расчете остаточного дисбаланса.
Систематические погрешности балансировочного станка должны быть устранены или скорректированы, а случайные погрешности не должны превышать порога чувствительности данного станка по дисбалансу. Если оценку погрешности балансировки проводят на балансировочном станке в условиях, когда масса ротора или расположение измерительных плоскостей значительно отличаются от имевших место при испытаниях балансировочного станка, следует провести дополнительные испытания с использованием данного ротора, с тем чтобы определить порог чувствительности по дисбалансу для заданного расположения измерительных плоскостей.
5.4 Экспериментальная оценка случайных погрешностей
Если есть предположения о наличии значительных случайных погрешностей, необходимо произвести несколько пусков для оценки значений этих погрешностей. При этом важно убедиться, что случайные ошибки на самом деле являются случайными для каждого пуска (например, устанавливая различные начальные угловые положения ротора при каждом пуске).
Значение погрешности может быть определено посредством стандартных статистических процедур. В большинстве случаев можно рекомендовать следующий приближенный расчет.
На графике откладывают измеренные векторы остаточного дисбаланса и определяют средний вектор для всех пусков (рисунок 1).
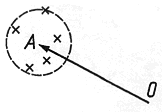
Рисунок 1 - Измерение вектора остаточного дисбаланса для случая случайной погрешности
Описывают окружность минимального радиуса с центром в точке , охватывающую все точки измерений. Вектор
представляет собой оценку остаточного дисбаланса, а радиус окружности может служить в качестве оценки максимальной погрешности при единичном измерении. Точность данного метода повышается с увеличением числа пусков.
В некоторых случаях, например когда одна из точек лежит на большом расстоянии от других, оценка погрешности может получиться неоправданно большой. Здесь для определения погрешности может потребоваться более детальный анализ.
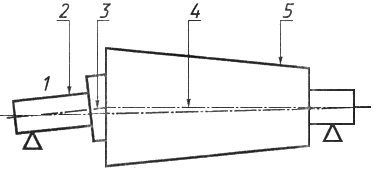
5.5 Экспериментальная оценка систематических погрешностей
Большинство систематических погрешностей может быть обнаружено посредством индексной балансировки, заключающейся в следующем. Ротор попеременно устанавливают в двух угловых положениях (относительно привода или оправки), отличающихся друг от друга на 180°. В обоих положениях по нескольку раз измеряют дисбаланс. Если векторы и
, как изображено на рисунке 2, представляют собой средние векторы дисбаланса ротора для этих двух положений, для каждой измерительной плоскости может быть построена диаграмма, где точка
соответствует середине расстояния
. Тогда вектор
будет представлять собой вектор систематической ошибки, а векторы
и
- векторы остаточных дисбалансов ротора для начальных положений ротора под углом 0° и 180° соответственно.
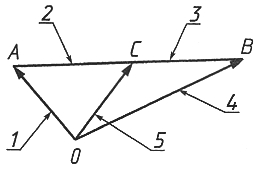
1 - вектор средних значений для ротора, установленного под углом 0°; 2 - вектор остаточного дисбаланса ротора (угол установки 0°); 3 - вектор остаточного дисбаланса ротора (угол установки 180°); 4 - вектор средних значений для ротора, установленного под углом 180°; 5 - вектор систематической погрешности
Рисунок 2 - Измерение вектора остаточного дисбаланса для случая систематической погрешности
Примечание - В описанной процедуре предполагалось, что при установке в начальное положение ротор поворачивается относительно отметчика фазы. Если же положение отметчика фазы остается неизменным относительно углового положения ротора, вектор будет представлять собой остаточный дисбаланс ротора, а векторы
и
- систематические погрешности для двух начальных положений отметчика фазы.
6 Определение общей погрешности балансировки
Систематическая погрешность, амплитуда и фаза которой известны, может быть устранена, например посредством установки временных корректирующих масс в процессе балансировки или же путем математической коррекции результатов. Если систематические погрешности не устранены или не могут быть устранены каким-либо из этих способов, они должны быть объединены, как показано ниже, со случайными и скалярными погрешностями.
Пусть - модуль нескорректированной погрешности, вызываемой какой-либо причиной, предпочтительно оцененной с достаточной доверительной вероятностью;
- общая нескорректированная погрешность. Тогда гарантированную оценку общей погрешности можно получить по формуле
![]() . (3)
. (3)
Даже в случае наиболее неблагоприятного сочетания погрешностей от различных источников использование данного значения в соответствии с критерием, приведенным в разделе 7, обеспечивает приемлемое качество ротора.
Формула (3) основана на наиболее пессимистичном предположении, что все нескорректированные погрешности имеют одну и ту же фазу и, следовательно, должны складываться алгебраически.
Если обнаруживается, что при использовании данной формулы в соответствии с критериями раздела 7 общая нескорректированная погрешность будет вызывать выход остаточного дисбаланса ротора за пределы допуска, рекомендуется попытаться уменьшить наиболее значительные источники погрешности.
В некоторых случаях допустим статистический подход, учитывающий то, что совпадение фазы у погрешностей разной природы маловероятно. В качестве общей погрешности может быть взято среднее квадратическое значение
![]() . (4)
. (4)
Указанную процедуру выполняют для каждой плоскости измерений. При наличии соответствующих условий можно провести оценку погрешностей по измерениям на достаточно большой выборке роторов. При этом предполагается, что для однотипных роторов, произведенных и собранных в схожих условиях, будут наблюдаться погрешности одного значения.
В условиях массового производства роторов может потребоваться, по согласованию между поставщиком и пользователем, определение общей погрешности в результате применения специальных статистических процедур.
7 Критерии приемки
Пусть для каждой измерительной плоскости - допустимый остаточный дисбаланс в соответствии с ГОСТ 22061;
- измеренный остаточный дисбаланс по результатам единичного пуска* после проведения коррекции систематической погрешности известной амплитуды и фазы;
- общая погрешность, как определено в разделе 6.
________________
* Измерения остаточного дисбаланса могут быть проведены, например одним из следующих методов: на балансировочном станке; с помощью аппаратуры измерения амплитуды и фазы сигнала и расчетом по методу коэффициентов влияния. Для более точной оценки возможно использование нескольких пусков с установкой известных пробных масс под различными углами в обеих плоскостях коррекции.
Состояние уравновешенности ротора будет рассматриваться производителем как удовлетворительное, если выполняется следующее условие:
![]() . (5)
. (5)
Погрешность можно не принимать в расчет, если она составляет менее 5%
.
Если пользователь осуществляет дополнительный контроль качества балансировки ротора, последний будет принят при выполнении условия
![]() . (6)
. (6)
Если данное условие не выполняется, может потребоваться пересмотр или повторение процедуры балансировки.
Примечание - При оценке качества балансировки следует учитывать прогнозируемое изменение дисбаланса в процессе хранения и транспортировки.
ПРИЛОЖЕНИЕ А
(справочное)
Примеры погрешностей, их идентификация и оценка
А.1 Погрешности, вызываемые балансировочным оборудованием
Данные погрешности имеют место при любом способе опирания балансируемого ротора (см. рисунки A.1, A.2 и А.3) и могут быть вызваны следующими факторами.
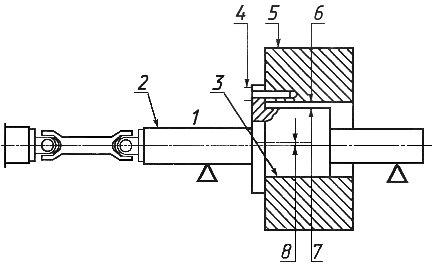
1 - цапфа;
2 - оправка;
3 - втулка;
4 - болт крепления; 5 - ротор; 6 - диаметр изделия; 7 - диаметр оправки; 8 - эксцентриситет втулки
Рисунок A.1 - Ротор, установленный на оправке
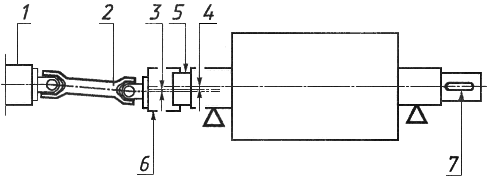
1 - привод;
2 - вал привода; 3 - эксцентриситет адаптера; 4 - эксцентриситет вала; 5 - цапфа; 6 - адаптер привода; 7 - шпонка (шпоночная канавка)
Рисунок A.2 - Ротор, установленный на собственных подшипниках
1 - цапфа;
2 - оправка;
3 - ось оправки; 4 - ось ротора; 5 - ротор
Рисунок А.3 - Ротор, установленный на оправке и на собственном подшипнике
а) Дисбаланс и эксцентриситет, обусловленные приводом, оправкой и т.д.
Данные погрешности могут быть оценены в процессе индексной балансировки. Процедура может быть осложнена невоспроизводимостью условий соединения [раздел А.1 в)] и погрешностями, вызываемыми самим балансируемым изделием (раздел А.2).
б) Подшипники
Подшипники качения, используемые для проведения процедуры балансировки, могут вносить погрешность, пропорциональную эксцентриситету или угловой несоосности вращающегося кольца и массе ротора. Эту погрешность можно определить, повернув подшипниковое кольцо относительно ротора на 180°.
Примечание - В контексте данного пункта эксцентриситет рассматривают как следствие радиального и (или) осевого биения.
в) Механическая посадка
Посадка может являться источником погрешности, в частности значение дисбаланса после переборки может измениться.
Примерами причин погрешностей, вызываемых посадкой, являются большой радиальный зазор или, напротив, посадка с большим натягом, а также случай, когда соединительные болты влияют на положение центрирующей цапфы. Разброс вследствие различной посадки следует оценить, повторяя сборку с зазорами, устанавливаемыми в различных угловых положениях. В результате усреднения значений дисбалансов, полученных после каждой переборки, определяют среднее значение дисбаланса.
г) Масса балансировочного оборудования
Массу вращающегося оборудования, используемого при балансировке (необязательно оправки), желательно, по возможности, уменьшить, чтобы минимизировать погрешности вследствие эксцентриситетов или зазоров центрирующих устройств.
Уменьшение массы оправки повышает чувствительность станка с податливыми подшипниками, но мало сказывается на чувствительности станка с жесткими опорами.
А.2 Ошибки, вызываемые самим ротором (рисунок А.2)
Данные погрешности имеют место при опирании балансируемого ротора своими собственными цапфами (см. рисунок А.2) и могут быть вызваны следующими факторами.
а) Незакрепленные детали
Погрешности, вызываемые незакрепленными деталями, могут быть определены посредством разгона и остановки ротора, при том что начальное угловое положение ротора от пуска к пуску изменяется, и проведением измерений для каждого пуска. Значение погрешности и среднее значение дисбаланса могут быть получены на основе метода, описанного в 5.4. В некоторых случаях может оказаться полезным изменение направления вращения, но к этому следует относиться с осторожностью.
Необходимо отметить, что для некоторых машин незакрепленность деталей может проявляться только в реальных условиях эксплуатации.
б) Наличие захваченных капель жидкости или частиц износа
Если ожидается, что при вращении ротора им будут захватываться капли жидкости или частицы износа и этого избежать невозможно, ротор следует оставить на некоторое время в положении, когда его вершина соответствует 0°, а затем произвести пуск и снять показания. То же самое следует повторить для положений вершины ротора, соответствующих 90°, 180° и 270°. Для получения значений погрешности и среднего значения дисбаланса следует воспользоваться методом, описанным в 5.4.
Следует обратить особое внимание, чтобы на результаты измерения не оказали влияния тепловые эффекты, которые могут появиться, например вследствие продолжительного нахождения ротора в одном положении [см. раздел А.2 в)].
в) Тепловые эффекты
Искривление ротора и дисбаланс вследствие неравномерного распределения температуры особенно часто наблюдаются на длинных и полых роторах.
Этот эффект можно уменьшить, если не позволять ротору находиться в неподвижном положении даже относительно короткий период времени или же вращать ротор до того момента, пока вектор дисбаланса не перестанет изменяться. Для этого можно использовать низкие скорости вращения, например от 5 до 10 об/мин.
К значительным искривлениям ротора могут привести операции, связанные с нагревом или сваркой при коррекции дисбаланса. Обычно для выравнивания температуры ротора и возвращения его состояния к нормальному требуется рассеяние локализованного нагрева и (или) некоторое стабилизирующее время вращения.
г) Подшипники
Угловое положение вращающихся колец подшипников относительно ротора должно сохраняться неизменным в течение всей процедуры балансировки, в противном случае могут появиться погрешности, аналогичные тем, что описаны в разделе A.1 б).
Ложные значения моментного дисбаланса могут быть получены на балансировочных станках как с податливыми, так и жесткими подшипниковыми опорами вследствие осевого биения вращающейся упорной поверхности, вследствие перекоса шарикового подшипника относительно оси вала или вследствие изгиба ротора.
Эти эффекты могут быть обнаружены при пусках ротора на различных скоростях вращения и
, а погрешность может быть оценена следующим образом.
Для балансировочного станка с жесткими подшипниками влияние осевого биения может быть выражено в виде дисбаланса ![]() на скорости
на скорости :
![]() ; (А.1)
; (А.1)
![]() , (А.2)
, (А.2)
где ,
,
,
- измеренные значения, представляющие собой сумму "дисбалансов", порождаемых осевыми биениями, и дисбалансов (остаточных)
и
в левой и правой плоскостях на скоростях
и
соответственно. Станок должен быть калиброван в тех же самых единицах дисбаланса для каждой из указанных скоростей и плоскостей.
Для балансировочного станка с податливыми подшипниками ложный дисбаланс зависит от вибрирующих масс в системе опоры податливых подшипников и, следовательно, обратно пропорционален квадрату скорости. Таким образом, справедливы те же самые формулы.
В приведенных расчетах предполагалось, что силы в подшипниках для станка с жесткими подшипниками, вызываемые осевым биением вращающейся упорной поверхности, не зависят от скорости, а для станка с податливыми подшипниками от скорости не зависит вибрация подшипников, вызываемая дисбалансом.
Формулы (А.1) и (А.2) справедливы только в том случае, если измерения проводят на скорости, достаточно далеко отстоящей от резонансной скорости ротора и (или) балансировочного станка.
Аналогичные эффекты могут наблюдаться на очень низких скоростях балансировки, когда цапфы ротора, имеющие прогиб, установлены на открытые ролики или когда у опоры балансировочного станка с роликовыми поверхностями нет достаточной свободы передвижения в вертикальной плоскости. Эти ошибки могут быть сведены к минимуму при определенной конструкции опоры балансировочного станка. В некоторых случаях погрешности, вызываемые осевыми биениями упорной поверхности, могут быть сведены к нулю в результате регулировки упорных подшипников.
д) Механическая посадка
Дисбаланс может изменяться в процессе работы вследствие особенностей конструкции или неправильной сборки насаживаемых узлов. Такие изменения могут также иметь место, если ротор подвергается частичной разборке после балансировки и последующей сборке [см. также разделы А.1 в) и А.2 а)].
е) Эксцентриситет поверхности крепления на конце привода
Если конец приводного вала балансировочной машины соединен с устройством центровки, имеющим эксцентрисистет, это может привести к ошибкам, не устранимым индексной балансировкой. Такую погрешность можно оценить, только зная эффективную массу привода и вектор эксцентриситета устройства центровки относительно оси вала ротора. При необходимости можно применить временную компенсирующую массу в соответствующем угловом положении во время балансировки.
ж) Магнитные эффекты
Магнитные эффекты в первую очередь могут проявлять себя в балансировочных станках тем, что вызывают неправильное считывание показаний дисбаланса, если их частота совпадает с частотой вращения или близка к этой частоте.
Такое может быть, например, если датчики балансировочного станка попадают в магнитное поле ротора, изменяющееся с частотой вращения ротора. Воздействие намагниченности ротора проще всего устранить либо экранируя датчики, либо, для балансировочных станков с жесткими подшипниками, выбирая достаточно высокие скорости балансировки, на которых указанное воздействие не является таким значительным. Наличие магнитных эффектов можно обнаружить, проводя измерения дисбаланса на различных скоростях, в пределах которых ротор остается жестким.
В таблице А.1 собраны возможные источники погрешностей балансировки с указанием способов их устранения и методов оценки.
Таблица А.1 - Идентификация источников погрешностей и методы оценки
Природа ошибки | Описание источника ошибки | Методы уменьшения погрешности измерения дисбаланса | Оценка погрешности измерения дисбаланса | ||
Экспери- | Экспери- | Другие методы | |||
Балансировочный станок | Систематические и случайные погрешности измерительного оборудования | Проверить калибровку и правильность функционирования станка; если необходимо, внести коррективы. Заново калибровать или отремонтировать станок | - | - | См. примечание 1 |
Вспомогательное оборудование | Дисбаланс приводного устройства | Произвести балансировку вспомогательного оборудования | Повернуть ротор на 180° относительно привода или оправки | Оценка возможна, но индексная балансировка более экономична | Измерить модуль и фазу ошибки посредством раздельной балансировки элементов (см. примеча- ние 2) |
Дисбаланс оправки | Произвести балансировку оправки или другого вспомогательного оборудования более тщательно. Уменьшить массу вспомогательного оборудования | ||||
Радиальные и осевые биения устройства привода | Произвести балансировку или заменить устройство привода | - | - | - | |
Радиальные и осевые биения оправки | Заменить или компенсировать смещенной массой | - | - | - | |
Эксцентриситет подшипника качения | Произвести балансировку в эксплуатационных подшипниках. При необходимости замены при сборке ротора в корпус установить на валу помеченные внутренние кольца подшипника | Заново устанавливать по очереди подшипники с поворотом на 180° | - | - | |
Ротор | Неплотное крепление, например лопаток ротора компрессора | Произвести несколько пусков и остановок ротора и найти средний дисбаланс | - | Пускать ротор при различных начальных положениях | - |
Наличие захваченных частиц жидкости или твердого вещества | Удалить источник загрязнения, если невозможно, произвести несколько пусков и остановок и найти средний дисбаланс | - | Давать выдержку | - | |
Тепловые и гравитационные эффекты | Добиться стабильного вращения ротора перед балансировкой. Не позволять ротору находиться в статическом положении на балансировочном станке длительное время | - | Оценка возможна, но следует попытаться уменьшить данные эффекты (см. примечание 3) | - | |
Сопротивление воздуха | Перекрыть пути поступления воздуха или изменить направление вращения ротора | - | - | Сравнить результаты измерений на разных скоростях вращения | |
Магнитные поля (например, намагниченность ротора) | Размагнитить ротор, увеличить скорость вращения при балансировке для уменьшения влияния магнитного поля | - | - | Измерить модуль и фазу ошибки при пуске на малой скорости | |
Перекос подшипника качения | Выправить положение внутреннего кольца, произвести обработку заплечика ротора | - | - | Сравнить результаты измерений на разных скоростях вращения | |
Плохая обработка поверхности цапфы; плохая смазка | Произвести чистовую обработку цапф, произвести смазку | - | - | - | |
Несоосность (для ротора с числом подшипников более двух) | Уравновесить в двух подшипниках или установить ротор на жесткой раме с несколькими опорами | - | - | - | |
Шпонка и шпоночная канавка | Произвести балансировку с полушпонкой | - | - | - | |
Осевые и радиальные биения элементов крепления привода | Произвести обработку поверхностей или использовать ременный привод | - | - | - | |
Сборка | Зазоры в соединениях | Произвести натяжение в соединении, заменить вал привода или использовать ременный привод | Проводить измерения для каждого пуска с нулевым зазором (если возможно) | Перебирать соединения между пусками (ротор останавливают в разных угловых положениях) | - |
Неправильная посадка деталей в соединениях | Разобрать и заново собрать соединение | Измерить осевые биения | - | - | |
Примечания 1 Если масса изделия или расположение плоскостей измерения существенно отличаются от обеспечиваемых при испытаниях балансировочного станка, следует провести испытания для определения минимально достижимого остаточного дисбаланса в установленных плоскостях измерений на самом изделии (роторе). 2 В общем случае ошибки известных модуля и фазы могут быть скорректированы. Однако если эти ошибки превышают 3 Следует тщательно контролировать результаты измерений, чтобы не принять тепловые эффекты за влияние захваченных частиц и наоборот. | |||||
Электронный текст документа
и сверен по:
М.: ИПК Издательство стандартов, 2000
{kind=link}